Embed Size (px)
Citation preview

128
Chapter 7
DESIGN MODIFICATION OF
INDUCTION MOTOR FOR PROPULSION
PURPOSES
7.1. Introduction
Electric drives are well known and wide spread in the industry and
propulsion system. However, the constraints and the requirements on these
kinds of systems embedded in propulsion applications are different, when
compared to a classical industrial application. Generally, transport
propulsion systems are operating during relatively short duration, with a lot
of transient phases and on a wide range of operating conditions. Even
though permanent magnet machines are getting more widespread in drive
applications due to their superior power density, compactness and current
availability of power electronics needed for effective control, recent increase
in price of permanent magnet materials restricts its wide spread usage in
propulsion system. Switched reluctance machines have also been
considered as a candidate for propulsion application, but they are still less
widespread. Synchronous wound rotor machine is also not selected due to
rotor copper losses which is difficult to evacuate. Induction motors are
considered a better choice for propulsion applications due to their
robustness, reliability, low price etc.
In this chapter, adaptability of induction motor for propulsion system
is discussed with emphasis given to motor-load interaction. Design options
are generated with the spread sheets developed for design of induction
motor. Simulations are carried out in various design options for motor
characteristics and compared the results.

129
7.2. Motor Characteristics for Propulsion Systems
The major requirements of electric propulsion are listed as below:
i. High instant power and high power density for better
controllability.
ii. High torque at low speeds for starting and climbing, as well as
constant power at high speed for cruising.
iii. Four quadrant operation with parabolic torque speed curve
iv. Very wide speed range including constant torque and constant
power regions.
v. Fast torque response.
vi. High efficiency over the entire speed range including regeneration.
vii. High reliability and robustness with sensorless speed control.
viii. Techno economically viable cost along with controlled drives.
Moreover, in the event of faulty operation, the electric propulsion
should be fault-tolerant.
7.3. Induction Motor for Propulsion Systems
The selection of the electrical motor is an important task that requires
special characteristics like high torque response and efficiency, or low
maintenance and cost [88]. Nowadays, three–phase squirrel cage induction
motors and permanent magnet machines are more appropriate solutions
due to their lower cost and higher reliability [89].The regenerative braking
system, which allows delivering power back to the batteries while braking, or
even when vehicles go downhill, is also possible when using induction
motors along with controlled drives.
Development of precise digital algorithms using microcontrollers to
control power inverters for driving induction motors made them an ideal
candidate in propulsion applications. Cage induction motors are widely
accepted as the most potential candidate for the propulsion according to
their reliability, ruggedness, low maintenance, low cost, and ability to
operate in hostile environments [90], [91]. Field oriented control of induction
motors can decouple its torque control from field control and extended speed
range operation with constant power beyond base speed is accomplished by

130
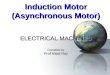
flux weakening. The torque-speed characteristics of induction motor with
extended field weakening operation can meet nearly series excited DC motor
characteristics is shown in Fig. 7.1 for comparison.
Fig. 7.1 Torque-speed curves
7.4. Design Modification of Induction Motor to meet propulsion characteristics along with suitable drive
Existing constraints for the operation at field weakening are the
maximum output voltage and the permitted maximum current of the
inverter. To produce the maximum torque that the machine could possibly
develop, the excitation level at field weakening must be appropriately
adjusted. Most commonly used methods of excitation control do not fully
utilize the installed inverter power which can lead to a reduction of torque
and power down to 65% in field weakening [92]. Hence it is required to
explore novel methods to produce maximum torque of the induction motor
in FW region. The innovative method proposed in this work is to carry out
appropriate design modification of the induction motor by changing the
rated value of power factor so as to produce maximum torque in field
weakening region.

131
7.4.1. Design Procedures for Induction Motors
The main specifications for the design of a three phase squirrel cage
induction motor are: rated output power in HP or kW, frequency in Hz,
voltage in volts, speed in rpm, efficiency, power factor and full load current
in ampere.
The standard specification for the design of an induction motor are
materials (lamination thickness, conductor diameter), performance indexes
(efficiency, power factor, starting torque, starting current, breakdown
torque), temperature by insulation class, frame sizes, shaft height, cooling
types, service classes, protection classes, etc. are specified in national (or
international) standards (NEMA, IEEE, IEC, EU, etc.) to facilitate the
induction motor for various applications.
The main purpose of designing an induction motor is to obtain the
complete physical dimensions of all the parts of the machine as mentioned
below to satisfy the given specifications and stator and rotor laminations of
an induction motor are shown in Fig. 7.2.
i. The main dimensions of the stator
ii. Details of stator windings
iii. Design details of rotor and its windings
iv. Performance characteristics
Fig. 7.2 Stator and rotor laminations of an induction motor

132
The stator and rotor dimensions are determined by independent
variables which are: stator slot height, stator tooth width, rotor slot height,
rotor tooth width, air-gap length, air gap flux density, stack length, outer
stator diameter, stator wire size and electrical steel type. Besides the above
independent variables, the design involves some non-linear constraints
which concern mainly the motor performances. They are stator winding
temperature, rotor bar temperature, flux density in the stator.
The type of winding adopted in this design is the squirrel cage type as
it is simpler and economical, which consists of a number of bars embedded
in the rotor slots and connected at both ends by means of end rings.
The major steps in designing an IM may be divided into 5 areas:
electrical, dielectric, magnetic, thermal and mechanical.
Electrical design: To supply the IM, the supply voltage, frequency, and
number of phases are specified. From this data and the minimum power
factor and a target efficiency, the phase connection (star or delta), winding
type, number of poles, slot numbers and winding factors are calculated.
Current densities are imposed.
Magnetic design: Based on output coefficients, power, speed, number of
poles, type of cooling, and the rotor diameter is calculated. Then, based on a
specific current loading (in A/m) and air gap flux density, the stack length is
determined. Fixing the flux densities in various parts of the magnetic circuit
with given current densities and slot mmfs, the slot sizing, core height, and
external stator diameter Do are all calculated. Choosing Do, which is
standardized, the stack length is modified until the initial current density in
the slot is secured. It is evident that sizing the stator and rotor core may be
done many ways based on various criteria.
Insulation design: Insulation material and its thickness, be it slot/core
insulation, conductor insulation, end connection insulation, or terminal
leads insulation depends on machine voltage insulation class and the
environment in which the motor operates. There are low voltage 400V/50Hz,
230V/60Hz, 460V/60Hz 690V/60Hz or less or high voltage machines
(2.3kV/60Hz, 4kV/50Hz, 6kV/50Hz). When PWM converter fed IMs are
used, care must be exercised in reducing the voltage stress on the first 20%
of phase coils or to enforce their insulation or to use random wound coils.

133
Thermal design: Extracting the heat caused by losses from the IM is
imperative to keep the windings, core, and frame temperatures within safe
limits. Depending on application or power level, various types of cooling are
used. Air cooling is predominant but stator water cooling in the stator of
high speed induction motors (above 10,000 rpm) is frequently used.
Calculating the loss and temperature distribution and the cooling system
represents the thermal design.
Mechanical design: Mechanical design refers to critical rotating speed, noise,
and vibration modes, mechanical stress in the shaft, and its deformation
displacement, bearings design, inertia calculation, and forces on the winding
end coils during most severe current transients.
Output Equation:
Output equation is the mathematical expression which relates the
output of the machine with its main dimensions. Rating of a three phase
induction motor, Q in kVA is given by:
33 10ph phQ E I−=
(7.1)
33 4.44 10w ph phQ x K f T Iφ −= (7.2)
where
2
spn
f =
Since the rating is given in kW, converted to kVA by the relation:
c o s
k Wk V A
η φ=
(7.3)
Specific magnetic loading, Bav is obtained by dividing total flux around the
air gap by area of flux path in the air gap as:
av
pB
DL
φ
π=
(7.4)
Specific electric loading, ac is obtained by dividing total armature ampere
conductors by armature periphery at the air gap.
6 ph phzT II Z
acD Dπ π
= =
(7.5)
Rearranging (7.4) and (7.5) gives:

134
a vB D L
p
πφ =
(7.6)
6p h p h
ac DT I
π=
(7.7)
Substituting (7.6) and (7.7) in (7.1) gives output equation of an AC machine,
2
0 sQ C D L n=
(7.8)
where output coefficient, 2 3
01 .1 1 1 0
a v wC B a c Kπ −=
31 1 1 0a v w
B a c K −=
Step 1: Choice of Specific loadings
Specific Magnetic loading or Air gap flux density, Bav is selected
normally from standard design tables and the value is limited by losses in
the teeth and magnetizing current. Higher value of Bav means the winding
requires less number of turns per phase, but higher value of overload
capacity. For 50 Hz machine, the value of Bav is between 0.35 and
0.60Wb/m2.
Specific electric loading or ampere conductors per meter of air gap
circumference, ac is selected from traditional design tables. High value of ac
means less electric material, but higher electric losses and lower overload
capacity. Normal range of ac is between10000 ac/m and 450000 ac/m.
Bav and ac values are taken from table A2.1 in Appendix II.
Step 2: Calculation of the main dimensions
The armature diameter and stator core length are known as the main
dimensions.
Aspect ratio: The output equation, (7.8) gives the relation between D2L
product and output of the machine,
2
0 s
QD L
C n=
(7.9)
The operating characteristics of an induction motor are mainly
influenced by the ratio L/τ. The ratio, D/L determines the shape of a pole,

135
square or rectangular. λ is selected from Fig. A2.1 and L and D are
calculated using (7.9) and (7.10).
L L
D
p
λτ π
= =
(7.10)
Following are the various design considerations based on which a
suitable value for λ can also be assumed from table 7.1.
Table 7.1 Value of λ
Sl No.
Design consideration Value of λ
1 Minimum overall cost 1.5 to 2.0
2 Good efficiency 1.4 to 1.6
3 Good overall design 1.0 to 1.1
4 Good power factor 1.0 to 1.3
For obtaining the best power factor, the following relation is usually
assumed for calculating D and L.
0.18Lτ = (7.11)
Check for peripheral velocity: The peripheral velocity is calculated using
(7.12). For normal construction of induction motors, the calculated diameter
of the motor should be such that the peripheral velocity must be below 30
m/sec.
v Dnπ= (7.12)
Step 3: Assume efficiency and power factor
Power factor and efficiency under full load conditions will increase
with increase in rating of the machine. The power factor and efficiency will
be higher for a high speed machine than the same rated low speed machine
because of better cooling conditions. Taking into considerations all these
factors the above parameters will vary in a range based on the output of the
machine. Efficiency and power factor values are selected from Figs. A2. 2
and A2. 3 in Appendix-II.

136
Step 4: Calculation of air gap length from empirical formula
The air gap length depends on both electromagnetic factors such as
magnetizing current, pulsation losses; and mechanical factors such as
mechanical tolerances, bearing, shaft deflection, unbalanced magnetic pull.
The length of airgap primarily determines the magnetizing current drawn by
the machine. The air gap length is calculated from [93], [94] as,
1/2
35 10
2g
Dl x τ−
=
(7.13)
( )1/233 10
gl x pτ−=
(7.14)
0.2 2gl DL= +
(7.15)
where
D
p
πτ =
Step 5: Calculation of rotor diameter
Rotor diameter can be calculated from the length of air gap as:
Rotor diameter, Dr = Stator bore – 2 x length of airgap 2g
D l= − (7.16)
Step 6: Calculation of number of stator turns per phase
Generally the induced emf can be assumed to be equal to the applied
voltage per phase. Thus stator turns per phase is obtained from emf
equation as:
4.44
ph
ph
w
ET
f Kφ=
(7.17)
where Flux/pole, a veB D L
p
πφ =
and winding factor, Kw is assumed as 0.955 for full pitch distributed
winding.
Step 7: Calculation of number of stator conductors
Number of conductors per phase and the total number of stator
conductors are obtained using the expressions (7.18) and (7.19)
2ph ph
Z T= (7.18)

137
6s ph
S T= (7.19)
Step 8: Calculation of cross sectional area of stator conductors
Stator current per phase is calculated using (7.20) as,
3 coss
ph
QI
V φ=
(7.20)
Area of cross section of stator conductors can be estimated from the
stator current per phase and suitably assumed value of current density for
the stator windings. Cross sectional area of the stator conductor,
ss
s
Ia
δ=
(7.21)
where δs is the current density in stator windings.
Usual value of current density for stator windings is 3 to 5 A/mm2.
Based on the cross sectional area, shape and size of the conductor can be
decided. If the sectional area of the conductors is below 5 mm2 then usually
circular conductors are employed. If it is above 5 mm2 then rectangular
conductors will be selected. Standard bare size of round and rectangular
conductors is obtained from the standard tables. In case of rectangular
conductors width to thickness ratio must be between 2.5 to 3.5.
Step 9: Calculation of stator slot pitch
Number of stator slots shown in Fig. 7.3 is selected based on the
criteria that less number of slots provides less cost and less space lost due
to insulation and slot opening while more number of slots causes smaller
leakage inductance, larger breakdown torque, small MMF harmonics and
better cooling. The total conductor per stator slot is calculated using (7.22)
as:
6p h
s
s
TZ
S=
(7.22)
where, Zs is an integer for single layer winding and even number for double
layer winding. Stator slot pitch at the air gap surface is obtained by dividing
gap surface by total number of stator slots as,

138
ss
s
DY
S
π=
(7.23)
The slot pitch at the air gap surface for open type of slots should be between
15mm to 25mm.
Fig. 7.3 Stator slots
Step 10: Calculation of area of stator slot
After calculating the number of conductors per slot, approximate area
of the slot is estimated as copper area in the slot divided by slot space
factor.
Area of each slot =
s sz a
sp a ce fa c to r (7.24)
The space factor varies between 0.25 and 0.4. The ratio of slot depth to slot
width is assumed as 3 to 6.
Step 11: Check for specific electric loading
The Specific electric loading is recalculated using (7.25).
6 p h p hT I
a cDπ
=
(7.25)
Then initial value chosen for ac is checked with the recalculated value.
Steps (1) to (11) is repeated with different value for ac until both the values
are approximately equal.
Step 12: Calculation of stator teeth dimensions
The dimensions of the slot determine the value of flux density in the
teeth. Stator tooth area is selected depending on mechanical strength

139
without teeth flux density being too high (normally between 1.6 to 1.8
Wb/m2).
Minimum tooth area per pole = 1 .7
mφ
(7.26)
Minimum width of stator tooth = ( )
/s i
to o th a rea p er p o le
S p L (7.27)
Step 13: Select suitable values of flux density in stator
Select suitable values of flux density in stator back iron from table
A2.2 and compute stator outer diameter.
Step 14: Calculation of outer diameter stator laminations
Area of stator core can be obtained by dividing flux through the core,
which is half of the flux per pole, by flux density in stator core. Suitable
values of flux density (between 1.2 to 1.4Wb/m2) in stator back iron are
selected and stator outer diameter is computed using (7.28).
Area of stator core, 2
mi cs
cs
L dB
φ= (7.28)
Depth of stator core, 2
mcs
cs i
dB L
φ= (7.29)
Outside diameter of stator laminations = 2 ( )cs ssD d d+ + (7.30)
Step 15: Calculation of stator winding resistance
Resistance of the stator winding per phase is calculated using the
expression,
c mt ph
s
s
L TR
a
ρ=
(7.31)
where Resistivity of copper, ρc = 0.021Ωm
Length of mean turn, 2 2.3 0.24mtL L τ= + +
Using the calculated resistance of stator winding, copper losses in stator
winding can be calculated as:
Total copper losses in stator winding 23s s
I R=
(7.32)

140
Step 16: Calculation of number of rotor slots
Proper number of rotor slots is selected in relation to number of stator
slots otherwise undesirable effects will be found at the starting of the motor.
The number of rotor slots is 15 to 30 percent larger or smaller than the
number of stator slots. The number of rotor slots is selected using the
following guide lines.
(i) To avoid cogging and crawling: (a) Ss ≠ Sr, (b) Ss- Sr ≠ ±3p
(ii) To avoid synchronous hooks and cusps in torque speed
characteristics Ss - Sr ≠ ±p, ±2p, ±5p
(iii) To avoid noisy operation Ss - Sr ≠ ±1, ±2, (±p ±1), (±p±2)
The value of stator slot number and rotor slot number for different pole is
shown in table A2.3.
Step 17: Calculation of area of rotor bars
The cross section of the bars and the end rings must be so selected
that a proper value of rotor resistance is obtained, which meets both the
requirements of starting torque as well as efficiency. Bar current in the rotor
of a squirrel cage induction motor may be determined by comparing the mmf
developed in rotor and stator. Hence the current per rotor bar is given by,
2coss ws s
b ph
r
m K TI I
Sφ=
(7.33)
Area of each bar is obtained by,
bb
b
Ia
δ=
(7.34)
where δb is the current density in rotor bars which normally varies between
4 to 7 A/mm2. For aluminum bar it is between 2.2 and 4.5 A/mm2 [95]. For
deep bar rotor it is between 5.5 and 7.5 A/mm2. For load with large inertia
and high rated speed, it should not exceed 6.5 to 7 A/mm2. Once the cross
sectional area is known the size of the conductor is selected form standard
design table.
Step 18: Select rotor slot shape and size
Semi-closed slots or closed slots with very small or narrow openings
are selected for the rotor slots shown in Fig. 7.4, as these are giving better
performance to the motor in the following ways:

141
i. As the rotor is closed the rotor surface is smooth at the air gap and
hence the motor draws lower magnetizing current,
ii. Reduced noise as the air gap characteristics are better,
iii. Increased leakage reactance,
iv. Reduced starting current,
v. Over load capacity is reduced and
vi. Undesirable and complex air gap characteristics.
Fig. 7.4 Types of rotor slots
Step 19: Calculation of copper losses in rotor bar
Knowing the length of the rotor bars and resistance of the rotor bars
copper losses in the rotor bars is calculated as,
Copper loss in rotor bars = 2
r b bS I r
(7.35)
where rotor bar resistance, 0 .0 2 1
bb
b
Lr
A=
Length of rotor bar, Lb = L + allowance for skewing
Step 20: Calculation of end ring current
The maximum end ring current is taken as the sum of the average
current in half of the number of bars under one pole. Current is not the
maximum in all the bars under one pole at the same time but varies
sinusoidally.
1
2 1.11
brbav
ISI
p=
(7.36)
rms value of end ring current,

142
1
1.11
brrms
ISI
pπ=
(7.37)
Step 21: Calculation of area of end rings
A suitable value for the current density in the end rings is assumed
and cross sectional area for the end ring is calculated as:
ee
e
IA
δ=
(7.38)
where δe is the current density in rotor bars which normally varies between
4.5 and 7.5 A/mm2. Area of end ring is obtained from another expression as
the product of depth of end ring and thickness of end ring.
Area of ring = depth of end ring x thickness of end ring =e ed t
(7.39)
Step 22: Calculation of copper losses in end rings
Knowing the length of current path and resistance of end ring, copper
losses in the rotor bars is calculated as,
Copper loss in end ring = 22e e
I r
(7.40)
where end ring resistance, 0 .0 2 1
m ee
e
Lr
A=
Mean length of the current path in end ring, m e m eL Dπ=
Mean diameter of end ring should be between 4 to 6 cm less than rotor
diameter.
Step 23: Calculation of Magnetizing current
Magnetizing MMF is obtained as.
0
2( )g
m c g mts mtr mcs mcr
BF K l F F F F
µ= + + + +
(7.41)
where, Kc - the Carter coefficient to account for the effective air gap
length increase due to slot opening which is usually range
from1.0 to 1.5 [93]-[96].
Fmts - MMF drop along stator teeth
Fmtr - MMF drop along rotor teeth

143
Fmcs - MMF drop along stator core
Fmcr - MMF drop along rotor core
MMF drop along stator teeth, stator core, rotor teeth and rotor core
are estimated from assigned flux density and B- H curve.
Based on the total ampere turns of the magnetic circuit, the magnetizing
current is calculated as [96],
0.427 mm
ph w
pFI
T K=
(7.42)
Step 24: Calculation of no load losses
Iron loss has two components, hysteresis and eddy current losses,
occurring in the iron parts depend upon the frequency of the applied
voltage. The frequency of the induced voltage in rotor is equal to the slip
frequency which is very low and hence the iron losses occurring in the rotor
is negligibly small. Hence the iron losses occurring in the induction motor is
mainly due to the losses in the stator alone. The total iron loss in induction
motor is taken as the sum of iron loss in stator core and iron losses in stator
teeth. The iron loss in stator teeth and core is obtained by calculating their
respective weights.
In addition to iron losses, friction and windage loss is to be taken into
account by assuming it as 1.0 to 2.0 % of the output of the motor.
total no load losses = Total iron losses + Friction and windage loss (7.43)
Step 25: Calculation of no load current
The no load current of an induction motor has two components,
magnetizing component, Im and iron loss component, Iw and is calculated as,
2 2
0 mI wI I= +
(7.44)
where, Iw = Total no load loss/(3 x phase voltage)
Step 26: Calculation of no load Power Factor
No load power factor is calculated knowing the components of no load
current.

144
0
0
cos wI
Iφ =
(7.45)
Step 27: Calculation of stator leakage reactance
The leakage reactance is calculated by considering several
components by using some equations and some empirical formulas.
2
02 ( )
ph
sl sls ds ecs
TX fL
pqπµ λ λ λ= + +
(7.46)
where q – Stator slots/pole/phase
slsλ -Stator slot leakage coefficients
dsλ -Stator differential leakage coefficients
ecsλ -Stator end leakage coefficients
2
1
0 12 ( ) ( )
ph
sl sls ds ecs s sls ds ecs sls ds ecs
TX f L C X X X
pqπµ λ λ λ λ λ λ= + + = + + = + +
(7.47)
where slsX -Stator slot leakage reactance
dsX -Stator differential leakage reactance
ecsX -Stator end leakage reactance
Slot leakage coefficients: Deeper slot indicates larger slot leakage reactance
and wider slot means smaller leakage reactance. Figs. 7.5 and 7.6 show the
slot leakage flux in slots and slot dimensions.
Fig. 7.5 Slot leakage flux in slots

145
Fig. 7.6 Slot dimensions
1 2 1
22 1 3[ ]( )3 ( ) ( ) 4
s w ossls
s s os s os
h h h
b b b b b
βλ
+= + +
+ +
(7.48)
Differential leakage coefficients: Fig 7.7 shows the zig-zag stator and rotor
leakage flux lines.
Fig. 7.7 Zig-zag leakage flux lines
5 / 3 1
5 4 / 4
g c o
ds
g c o
l K b
l K b
βλ
+=
+
(7.49)
End leakage coefficients: Fig 7.8 shows the coil dimensions.

146
Fig. 7.8 Coil dimensions
0.34 ( 0.64 )ecs end p
ql
Lλ βτ= −
(7.50)
7.4.2. Development of Design Sheet
Based on the design procedure, design spread sheets are developed for
squirrel cage induction motor. The rated values are entered in input cells
and designed values are obtained from output cells of the design sheet as
shown in Fig. A2. 4 in Appendix II.
7.4.3. Design Modifications and Design Options
The induction motor is singly excited, means the electrical power is
applied only to the stator winding and the current flows through the rotor
winding by induction. As a consequence both the magnetizing current,
which sets up the magnetizing field, and the power current which allows
energy to be delivered to the shaft load, flow through the stator winding.
Thus for obtaining a larger power component for a given rating, either
keeping the magnetizing current as small as possible or keeping the air gap
as small as possible. For reduced value of magnetizing current, the power
factor can be reduced as per design equations.
Design options are generated by reducing the specified value of power
factor and the options are named as Design-A, Design-B, Design-C and
Design-D for power factors equal to 0.9, 0.8, 0.7 and 0.6 respectively. The
design values obtained from the design sheet for the four design options are
tabulated and presented in table. 7.2.

147
Table 7.2 Values of parameters for design options
Parameters
Design options for 10kW Design options for 30kW
A. Rating
A B C D A B C D unit
Full load output P 10.0 10.0 10.0 10.0 30.0 30.0 30.0 30.0 kW
Line voltage V 220 220 220 220 220 220 220 220 Volts
Frequency f 50 50 50 50 50 50 50 50 Hz
Efficiency η 90 90 90 90 90 90 90 90
Synchronous speed Ns 1500 1500 1500 1500 1500 1500 1500 1500 rpm
Number of poles p 4 4 4 4 4 4 4 4
kVA input
18.5 15.9 13.9 12.3 55.56 47.62 41.67 37.04 kVA
Full load line current IL 48.6 41.6 36.4 32.4 145.7 124.9 109.3 97.1 A
Power factor pf 0.60 0.70 0.80 0.90 0.60 0.70 0.80 0.90
B. Specific Loading
Magnetic loading Bav 0.44 0.44 0.44 0.44 0.45 0.45 0.45 0.45 Wb/m2
Electic loading ac 22000 22000 22000 22000 23000 23000 23000 23000 A/m
Output coefficient C0 102.5 102.5 102.5 102.5 108.9 108.9 108.9 108.9
C. Main dimensions
Stator bore D 210 200 190 185 295 280 270 260 mm
Core length L 165 155 150 145 230 220 210 205 mm
Pole pitch t 165 157 149 145 232 220 212 204 mm
D. Stator
Flux/pole ϕ 0.012 0.011 0.01 0.009 0.024 0.022 0.02 0.019 Wb
Turns/phase Ts 86 96 106 112 44 48 52 56 Nos.
Slot pitch Yss 18.3 17.4 16.6 16.1 25.73 24.42 23.55 22.680 mm
Required bare dia. of conductor
2.11 1.96 1.83 1.73 3.27 3.03 2.84 2.67 mm
Provided bare dia. of conductor
2.12 2.06 1.90 1.80 3.25 3.25 3.25 3.25 mm
Current density δs 3.98 3.61 3.71 3.68 5.08 4.35 3.81 3.38 A/mm2
Length of mean turn Lmts 0.95 0.91 0.88 0.86 1.233 1.186 1.147 1.119 mm
Phase resistance at 75⁰C Rs 0.24 0.28 0.35 0.40 0.069 0.072 0.076 0.079 W
Copper loss at full load
574 478 461 419 1460 1125 903 750 watts
Depth of stator core dcs 37 35 33 33 51 49 47 45 mm
Depth of stator slot dss 23 22 25 24 17.00 20.54 20.54 20.54 mm
Outer diameter of stator D0 329 319 306 299 431 419 405 391 mm

148
Table 7.2 (contd.)
Parameters
Design options for 10kW Design options for 30kW
E. Rotor:
A B C D A B C D unit
Length of air gap
0.57 0.55 0.54 0.53 0.72 0.70 0.68 0.66 mm
Diameter of Rotor
209 199 189 184 294 279 269 259 mm
Slot pitch
17.3 16.4 15.6 15.2 24.3 24.4 23.6 22.7 mm
Rotor bar current
218 244 269 284 335 366 396 426 A
Required c/s area of rotor bar
44 49 54 57 67 73 79 85 mm2
Provided c/s area of rotor bar
45 54 54 57 70 77 84 88 mm2
Resistance of each bar
100.3 79.7 77.8 68.3 84.0 73.6 65.0 60.9 W
Copper loss in bars
182 180 214 210 358 374 387 421 watts
End ring current
661 737 814 860 1014 1106 1198 1290 A
Required c/s area of rotor ring
132 147 163 172 203 221 240 258 mm2
Provided c/s area of rotor ring
135 150 170 176 204 228 247 260 mm2
Copper loss in end rings
72.4 76.4 76.1 78.7 166.5 163.9 168.3 177.9 watts
Total copper loss
254.1 256.3 290.1 288.3 524.9 537.8 555.7 598.5 watts
Full load slip
0.02 0.02 0.03 0.03 0.02 0.02 0.02 0.02
Resistance of rotor refers to stator
0.3 0.3 0.34 0.34 0.07 0.07 0.07 0.08 W
Depth of rotor core
36 34 33 32 51 48 46 45 mm
F. No Load Current:
Magnetizing MMF/pole
1050 865 662 591 967 1058 1051 805 A
Magnetizing current Im 41.5 33.7 28.9 24.3 66.9 64.5 63.2 56.8 A
Magnetizing reactance Xm 10.10 13.70 19.70 23.3 5.60 5.58 6.09 8.56 W
Core loss (CL)
573 509 454 415 1288 1220 1086 988 watts
Friction&Windage loss(FWL)
100 100 100 100 300 300 300 300 watts
No load loss
673 609 554 515 1588 1520 1386 1288 watts
Loss component
1.02 0.92 0.84 0.78 2.41 2.30 2.10 1.95 A
No load current (NLC)
41.5 33.7 28.9 24.3 66.9 64.5 63.2 56.8 A
G. Short circuit current
Slot leakage reactance
0.40 0.46 0.56 0.62 0.11 0.13 0.15 0.16 W
Overhang leakage reactance
0.46 0.55 0.63 0.69 0.17 0.19 0.22 0.24 W
Zigzag leakage reactance
0.20 0.27 0.38 0.45 0.11 0.11 0.12 0.17 W
Total leakage reactance
1.05 1.27 1.58 1.76 0.39 0.43 0.49 0.57 W
H. Performance at full load
Total losses
1501 1344 1305 1223 3573 3183 2846 2636 watts
Input
11501 11344 11305 11223 33573 33183 32846 32636 watts
Efficiency
87.0 88.2 88.5 89.1 89.4 90.4 91.3 91.9 %
7.5. Simulation Results and Discussion
The simulation model for sensorless FOC induction motor using SVM
inverter for FW operation is developed based on Fig. 6.11 in chapter 6 which
is used for the simulation of various design options for 10 kW and 30 kW.
For comparing the performance of various design options Design-A, Design-

149
B, Design-C and Design-D for 10kW and 30kW are named as Case-1, Case-
2 respectively.-
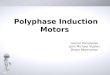
In the simulation, the motor starts from standstill state in no load
condition for all the cases and the speed responses are shown in Figs. 7.9
and 7.10 respectively. From the results, it is clear that in all the cases the
rotor speed increases from Design-A to Design-D, which means the rotor
speed increases with the reduction in power factor. The maximum attainable
rotor speed is increased from 2.94 p.u. to 3.36 p.u. and 4.80 p.u. to 5.30
p.u. for Cases 1 and 2 respectively as given in table 7.3.Variation of torque
with respect to rotor speed is presented in Figs. 7.11 and 7.12 for Cases 1
and 2 respectively for various design options. Torque capability is improved
in the FW region when power factor decreases as demonstrated in table 7.4.
Table 7.3 Rotor speed attained with time
Time
(sec) Unit
Case-1 (10 kW) Case-2 (30 kW)
A B C D A B C D
2 rpm 2399 2473 2545 2672 4267 4341 4658 5089
p.u. 1.65 1.70 1.75 1.84 2.94 2.99 3.21 3.50
4 rpm 3308 3417 3520 3731 5817 5934 6284 6571
p.u. 2.28 2.35 2.42 2.57 4.01 4.09 4.33 4.53
6 rpm 3864 4005 4106 4374 6607 6798 6880 7221
p.u. 2.66 2.76 2.83 3.01 4.55 4.68 4.74 4.98
8 rpm 4270 4430 4525 4885 6973 7225 7335 7687
p.u. 2.94 3.05 3.12 3.36 4.80 4.98 5.05 5.30
Table 7.4 Maximum torque (p.u.)
Rotor
Speed
(p.u.)
Case-1 (10 kW) Case-2 (30 kW)
A B C D A B C D
1.0 0.611 0.728 0.836 0.865 0.705 0.870 0.886 0.976
2.0 0.309 0.331 0.350 0.395 0.292 0.353 0.405 0.464
3.0 0.201 0.217 0.234 0.268 0.196 0.229 0.271 0.307
5.0 - - - - 0.093 0.101 0.104 0.166

150
Fig. 7.9 Speed responses for Case-1 (10 kW)
Fig. 7.10 Speed responses for Case-2 (30 kW)
0
1000
2000
3000
4000
5000
6000
0 1 2 3 4 5 6 7 8
Design - A
Design - B
Design - C
Design - D
Ro
tor
spee
d(r
pm
)
Time(sec)
0
1000
2000
3000
4000
5000
6000
7000
8000
0 1 2 3 4 5 6 7 8
Design - A
Design - B
Design - C
Design - D
Ro
tor
spee
d(r
pm
)
Time(sec)

151
Fig. 7.11 Torque vs. Rotor speed for Case-1 (10 kW)
Fig. 7.12 Torque vs. Rotor speed for Case-2 (30 kW)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Design - A
Design - B
Design - C
Design - D
To
rqu
e (p
.u.)
Rotor speed (p.u.)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 1.0 2.0 3.0 4.0 5.0 6.0
Design - A
Design - B
Design - C
Design - D
To
rqu
e (p
.u.)
Rotor speed(p.u.)

152
Variation of power with respect to rotor speed is presented in Figs.
7.13 and 7.14 for Cases 1 and 2 respectively for various design options.
Power is increased in the constant power region when power factor
decreases as demonstrated in table 7.5. Increase of power for Design-D
compared to Design-A is about 33% and 60% for Cases 1 and 2 respectively.
The variation of rotor magnetizing current (p.u.) with respect to rotor
speed (p.u.) is shown in Figs. 7.15 and 7.16 for Cases 1 and 2 respectively.
The magnetizing current curves for various design options are varying for
the entire speed range for various design options in both cases.
Table 7.5 Maximum power (p.u.)
Rotor Speed (p.u.)
Case-1 (10 kW) Case-2 (30 kW)
A B C D A B C D
1.0 0.611 0.728 0.836 0.865 0.705 0.870 0.886 0.976
2.0 0.618 0.662 0.700 0.790 0.580 0.706 0.810 0.928
3.0 0.603 0.651 0.702 0.804 0.588 0.687 0.813 0.921
5.0 - - - - 0.465 0.505 0.520 0.830
Fig. 7.13 Power vs. Rotor speed in Case-1 (10 kW)
0.00
0.20
0.40
0.60
0.80
1.00
1.20
0.0 1.0 2.0 3.0 4.0
Design - A
Design - B
Design - C
Design - D
Ideal curve
Po
wer
(p
.u.)
Rotor speed (p.u.)

153
Fig. 7.14 Power vs. Rotor speed in Case-2 (30 kW)
Fig. 7.15 Magnetizing current vs. Rotor speed in Case-1 (10 kW)
0.00
0.20
0.40
0.60
0.80
1.00
1.20
0.0 1.0 2.0 3.0 4.0 5.0
Design - A
Design - B
Design - C
Design - D
Ideal curve
Po
wer
(p
.u.)
Rotor speed (p.u.)
0.0
0.2
0.4
0.6
0.8
1.0
0.0 1.0 2.0 3.0 4.0
Design - A
Design - B
Design - C
Design - D
Ma
gn
etiz
ing c
urr
ent
(p.u
.)
Rotor speed (p.u.)

154
Fig. 7.16 Magnetizing current vs. Rotor speed in Case-2 (30 kW)
By observing the simulation results, it ensures that improvement in
torque capability and power of sensorless induction motor drive in FW
region is possible by decreasing the power factor.
7.6. Summary
In this chapter, adaptability of induction motor for propulsion
application is discussed with emphasis to motor-load interaction. Design
options are generated with the spread sheets developed for design of
induction motor. Simulations are carried out in various design options for
motor characteristics. By analyzing the result, the major finding of this
research work is evolved, which is, improvement in torque capability and
power of sensorless induction motor drive in FW region is possible by
decreasing the power factor.
0.0
0.2
0.4
0.6
0.8
1.0
0.0 1.0 2.0 3.0 4.0 5.0
Design - A
Design - B
Design - C
Design - D
Ma
gn
etiz
ing
curr
ent
(p.u
.)
Rotor speed(p.u.)

155
7.7. Publications related to this Chapter
International Conference:
1. G. K. Nisha, Z. V. Lakaparampil and S. Ushakumari, “Effect of Leakage inductance
on Torque Capability of Field Oriented Controlled Induction Machine in Field
Weakening Region,” International Conference on Advances in Engineering and
Technology (ICAET’2014), Singapore, 29-30 March2014.
International Journal:
1. G. K. Nisha, Z. V. Lakaparampil and S. Ushakumari, “Torque Capability
Improvement of Sensorless FOC Induction Machine in Field Weakening Region for
Propulsion Purposes,” communicated for publication in Journal of Computers and
Electrical Engineering: Elsievier. (under Review)
2. G. K. Nisha, Z. V. Lakaparampil and S. Ushakumari, “Effect of Power factor on
Torque Capability of FOC Induction Machine in Field Weakening Region for
Propulsion Systems,” communicated for publication in Journal of Institution of
Engineers (India) Series–B: Springer. (under Review)