Embed Size (px)
Citation preview
UNIVERSIDADE FEDERAL DE MINAS GERAIS PROGRAMA DE PÓS-GRADUAÇÃO EM
ENGENHARIA MECÂNICA
DESENVOLVIMENTO DE PROCEDIMENTOS DE PROJETO
ÓTIMO HÍBRIDOS PARA O CONTROLE DE RUÍDO EM
DUTOS DE SISTEMAS DE EXAUSTÃO INDUSTRIAIS
AUTOR: GUILHERME DE SOUZA PAPINI
Belo Horizonte, 17 de Dezembro de 2009
Autor: Guilherme de Souza Papini

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

II
DESENVOLVIMENTO DE PROCEDIMENTOS DE PROJETO
ÓTIMO HÍBRIDOS PARA O CONTROLE DE RUÍDO EM
DUTOS DE SISTEMAS DE EXAUSTÃO INDUSTRIAIS
Tese apresentada ao Programa de Pós-Graduação em
Engenharia Mecânica da Universidade Federal de Minas
Gerais, como requisito parcial à obtenção do título de
Doutor em Engenharia Mecânica.
Área de concentração: Calor e Fluidos
Orientador: Prof. Ricardo Luiz Utsch de Freitas Pinto
Universidade Federal de Minas Gerais
Co-orientador: Prof. Lázaro Valentin Donadon
Universidade Federal de Minas Gerais
Belo Horizonte
Escola de Engenharia da UFMG
2009
III
Universidade Federal de Minas Gerais Programa de Pós-Graduação em Engenharia Mecânica Av. Antônio Carlos, 6627 - Pampulha - 31.270-901 - Belo Horizonte – MG Tel.: +55 31 3409-5145 - Fax.: +55 31 3443-3783 www.demec.ufmg.br - e-mail: [email protected]
DESENVOLVIMENTO DE PROCEDIMENTOS DE PROJETO
ÓTIMO HÍBRIDOS PARA O CONTROLE DE RUÍDO EM
DUTOS DE SISTEMAS DE EXAUSTÃO INDUSTRIAIS
AUTOR: GUILHERME DE SOUZA PAPINI
Tese defendida e aprovada em 17, de dezembro de 2009, pela Banca Examinadora designada
pelo Colegiado do Programa de Pós-Graduação em Engenharia Mecânica da Universidade
Federal de Minas Gerais, como parte dos requisitos necessários à obtenção do título de
"Doutor em Engenharia Mecânica", na área de concentração de"Calor e Fluidos".
____________________________________________________________________ Prof. Dr. Ricardo Luiz Utsch de Freitas Pinto – UFMG – Orientador ____________________________________________________________________ Prof. Dr. Lázaro Valentin Donadon - UFMG – Co-orientador ____________________________________________________________________ Prof. Dr. Agenor de Toledo Fleury – FEI/USP – Examinador ____________________________________________________________________ Prof. Dr. Marcus Antonio Viana Duarte – UFU - Examinador ____________________________________________________________________ Prof. Dr. Eduardo Bauzer Medeiros - UFMG – Examinador ____________________________________________________________________ Profa. Dra. Maria Lúcia Machado Duarte - UFMG - Examinadora

IV
Com todo o meu amor para a minha esposa, Rísia,
que me apoiou incondicionalmente, e para a minha filha, Camille, luz de nossas vidas.

V
AGRADECIMENTOS
- Ao orientador Prof. Ricardo Luiz Utsch de Freitas Pinto pela força, pela amizade,
pelo interesse, pela disponibilidade absoluta, pelas críticas construtivas e pelo
suporte durante o desenvolvimento de todas as fases deste trabalho. Aqui fica
registrado o quanto sou grato a este singular professor de tão valorosa inteligência.
- Ao co-orientador Prof. Lázaro Donadon pelo auxílio fundamental na análise da
técnica de controle ativo de ruído.
- À minha esposa Rísia Magriotis Papini pelo apoio fundamental.
- À minha filha Camille Magriotis Papini pelo carinho e compreensão constante.
- Aos meus queridos pais Galliano Papini Filho e Maria Inês de Souza Papini pelo
apoio nas horas mais difíceis.
- À minha família pelo carinho constante.
- Aos colegas, professores e funcionários do Departamento de Engenharia Mecânica
da UFMG pela companhia e incentivo durante minha permanência neste
departamento.
- Ao Flávio Henrique de Menezes Moraes, aluno de Engenharia Mecânica da
UFMG, participante do desenvolvimento inicial do programa de controle ativo e
dos primeiros testes experimentais.
- Ao Cláudio Antônio de Abreu, da Sonic Mesh, pelo importante auxílio na
especificação, fabricação das caixas acústicas e montagem do sistema
eletroacústico.
- À Fundação de Amparo à Pesquisa do Estado de Minas Gerais (FAPEMIG) pelo
termo de outorga, Processo N0. EDT 121-06, fundamental para a compra dos
equipamentos e softwares utilizados na pesquisa do controle ativo de ruído.
- À Isobrasil Ltda pelo apoio financeiro e logístico para a montagem da planta de
controle ativo de ruído.
- A DEUS pelo milagre da vida a mim concedido e pela saúde ao longo desta
travessia.
Meus sinceros agradecimentos.

VI
“Há um tempo em que é preciso abandonar as roupas usadas...
Que já têm a forma do nosso corpo...
E esquecer os nossos caminhos que nos levam sempre aos mesmos lugares...
É o tempo da travessia...
E se não ousarmos fazê-la...
Teremos ficado... para sempre...
À margem de nós mesmos...”
Fernando Pessoa
VII
RESUMO
O ambiente industrial é caracterizado como uma das principais fontes de poluição
sonora, que impacta de forma decisiva a saúde do trabalhador, bem como o conforto e o
sossego público. O nível de ruído aceitável nestes ambientes é normalmente recomendado por
normas e legislações municipais, estadual e federal. O controle de ruído deve
preferencialmente ser efetuado na fonte sonora, usando máquinas e sistemas silenciosos.
Porém, por razões técnicas e econômicas, nem sempre se torna possível o controle na fonte.
Desta maneira, o presente trabalho tem como objetivo principal a elaboração de
procedimentos de projeto ótimo híbrido para o controle de ruído, tendo como referência a
viabilidade técnica e econômica, visando economia tanto na fabricação como na montagem
dos mesmos. O escopo está no ruído gerado nas admissões e exaustões de gases, em ambiente
industrial. Como opções de controle passivo serão considerados os silenciadores reativos,
resistivos ou combinados, sempre com a possibilidade de se agregar um sistema de controle
ativo para atenuar eventuais ruídos em conseqüência de condições particulares de operação.
Para a aplicação dos procedimentos de projeto ótimo híbrido no controle de ruído em
dutos foram resolvidos três problemas práticos. Os dois primeiros referem-se ao controle de
ruído na exaustão de ventiladores industriais de grande porte e de alta potência sonora
irradiada. Para a solução destes dois problemas foram dimensionados ressonadores de
Helmholtz, para atenuar as baixas freqüências, e atenuadores resistivos, para atenuar as
médias e altas freqüências, todos os dispositivos ligados em série, tendo em vista o
desempenho ótimo. O terceiro problema refere-se à atenuação sonora do ruído da exaustão de
gases de combustão de um motor a diesel estacionário. Para a solução deste problema foram
dimensionadas câmaras de expansão duplas interligadas por um duto interno com aplicação
de material absorvente nas paredes internas, constituindo um sistema híbrido, tendo em vista
um desempenho ótimo. Além disso, como perspectiva, apresenta-se a solução do problema do
tratamento de uma abertura para ventilação de uma cabine acústica, tendo-se em vista dois
processos distintos no interior da cabine. Ao final do trabalho, são também apresentados
resultados experimentais obtidos para o controle ativo de ruído em uma planta construída em
laboratório da UFMG. Os fundamentos teóricos e práticos deste estudo permitiram
complementar o procedimento de projeto ótimo híbrido proposto, aliando as técnicas passivas
à uma técnica ativa.

VIII
Palavras Chaves: silenciadores resistivos, silenciadores reativos, controle ativo de ruído,
projeto ótimo híbrido.

IX
ABSTRACT
The industrial environment is characterized as one of the main sources of sound
pollution that have decisive impact over worker health, as well the comfort and the public
calmness. Usually, acceptable noise level over these environments is recommended by
standards and legislations. If possible, the noise control must be made in the noise source,
using quiet machines or quiet systems. However, for technical and economic reasons,
exceptionally it becomes possible. In this way, the present work has as main objective to
development procedures for the hybrid optimum design to the noise control, taking into
account economic and technical viability. The target is to attenuate the noise generated in the
intake and exhaust gases of industrial plants. Both, passives and active techniques are
considered. As passive control both resistive and reactive silencers are applied, always with
the possibility of adding an active noise control to attenuate noise that can eventually happen
in consequence of particular operating conditions.
For the application of the procedures of hybrid optimum design in the noise control in
ducts three practical problems had been decided. The two first ones mention it the noise
control in the exhaustion of industrial fans of great capacity and high sound power levels
radiated. For the solution of these two problems had been designed Helmholtz resonators, to
attenuate the low frequencies, and resistive silencers, to attenuate the middle and high
frequencies, all devices in series, in despite of the optimum performance. The third problem
mentions it the noise control on the exhaustion of combustion gases of a stationary diesel
engine. For the solution of this problem were used double expansion chambers, both linked
for internal duct. In internal walls of chambers had been applied absorbent material. The
device is a hybrid system, in view of an optimum performance. Moreover, as perspective, it is
presented a solution of noise control in opening for ventilation of an acoustics enclosure,
having in sight two distinct processes in the interior of the cabin. To the end of the chapter,
also they are presented experimental results gotten for active noise control in a plant built in
laboratory of UFMG. The theoretical and practical beddings of this study had allowed
complementing the procedure of hybrid optimum design, linking passive techniques to one
active technique.
Keywords: resistive silencers, reactive silencers, active noise control, hybrid optimum design.
X
SUMÁRIO
LISTA DE FIGURAS............................................................................................................XIV
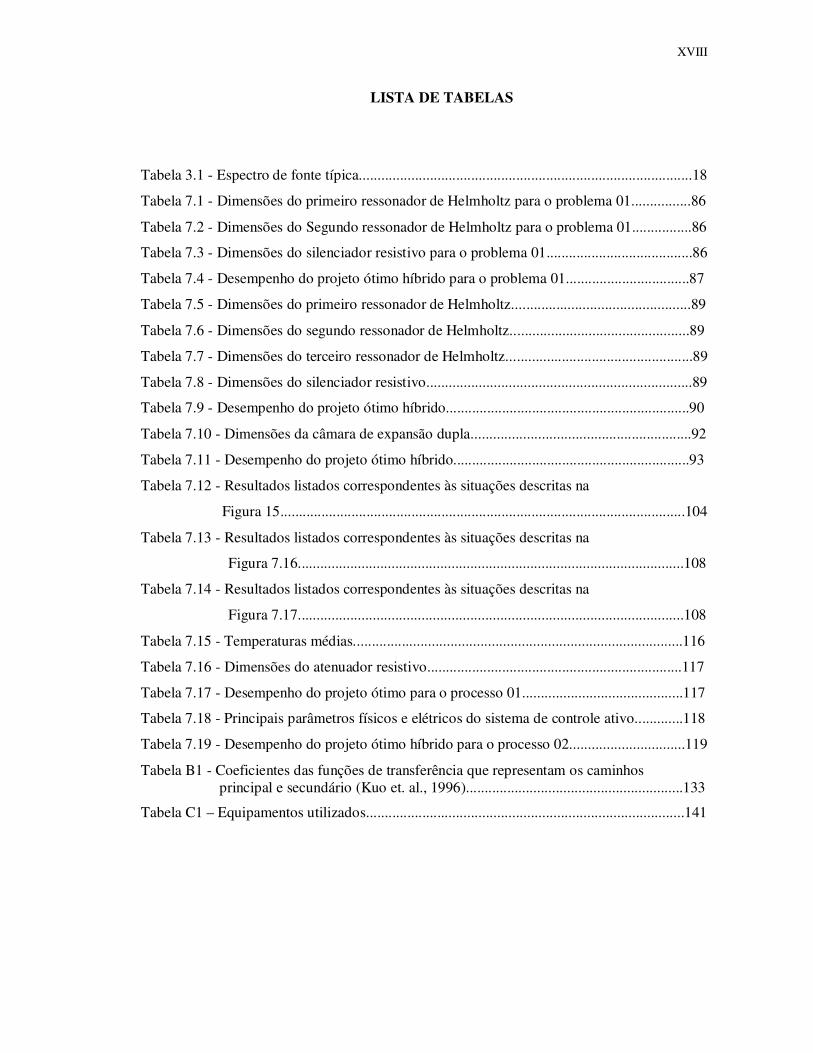
LISTA DE TABELAS........................................................................................................XVIII
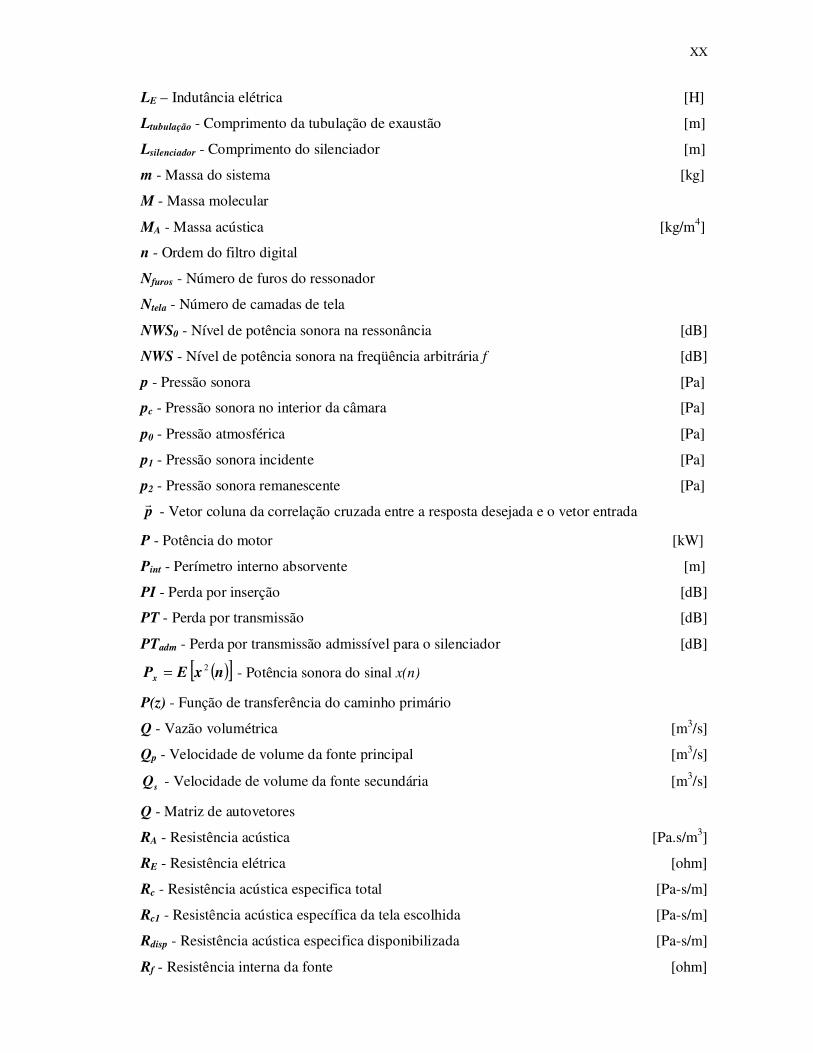
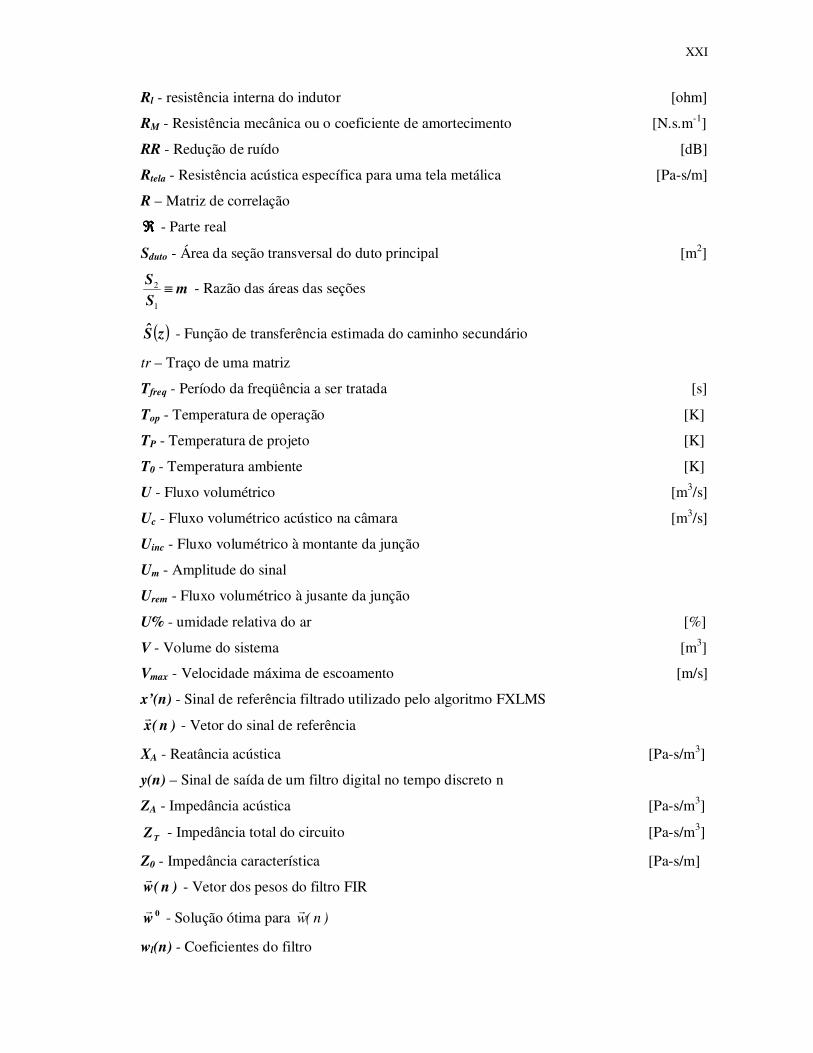
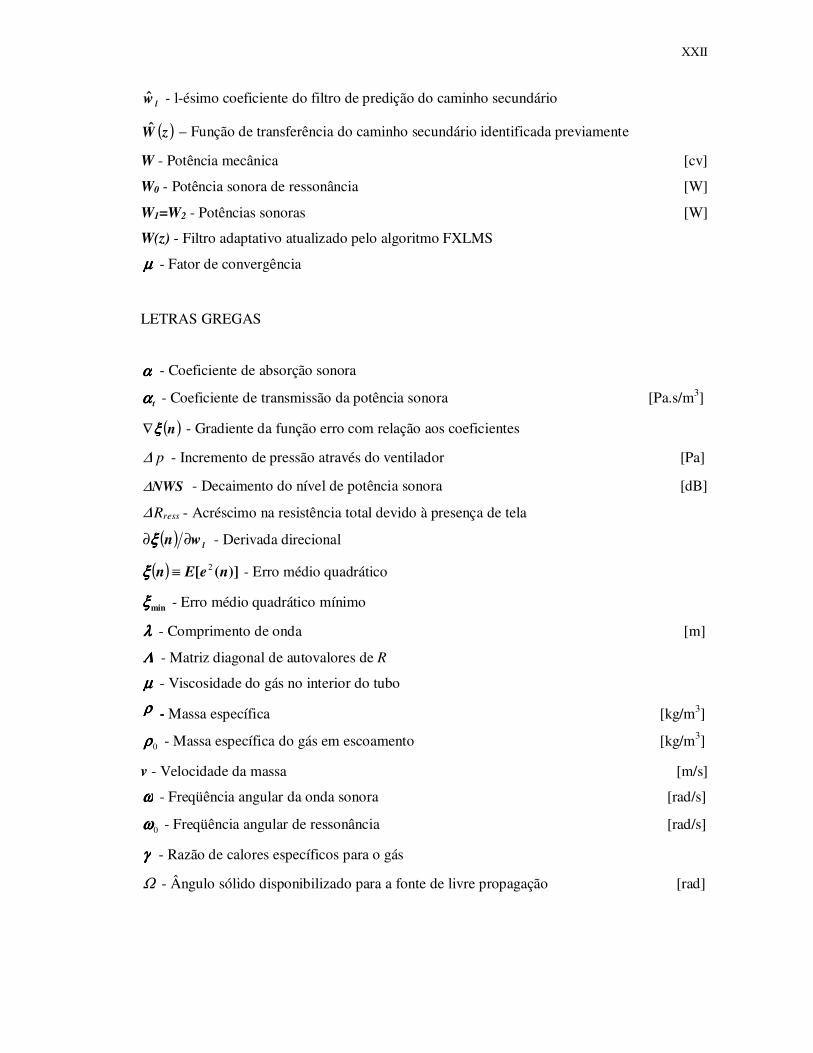
NOMENCLATURA..............................................................................................................XIX
1 INTRODUÇÃO .................................................................................................................. 1
1.1 Visão Geral do Problema.................................................................................................. 1
1.2 Motivação para o Desenvolvimento desta Tese ................................................................ 2
1.3 Objetivo do Trabalho ....................................................................................................... 3
1.4 Objetivos Específicos desta Tese ...................................................................................... 3
1.5 Contribuições Científicas do Presente Trabalho ................................................................ 3
1.6 Relevância Tecnológica do Presente Trabalho .................................................................. 4
1.7 Desenvolvimento do Trabalho .......................................................................................... 4
2 REVISÃO BIBLIOGRÁFICA ............................................................................................ 6
2.1 Técnicas Passivas de Controle de Ruído ........................................................................... 6
2.2 O Controle Ativo de Ruído ............................................................................................... 8
2.3 Controle de Ruído dentro do Contexto de Técnicas Híbridas .......................................... 13
3 ACÚSTICA DE DUTOS .................................................................................................. 14
3.1 Características mais Relevantes ...................................................................................... 14
3.1.1 Campos Sonoros em Dutos .......................................................................................... 14
3.1.2 Modo Acústico de Onda Plana .................................................................................... 14
3.1.3 Impedância Acústica em Dutos ................................................................................... 15
3.1.4 Freqüência de Corte de Dutos ...................................................................................... 16
3.2 Predição do Ruído em Dutos de Exaustão em Ventiladores Industriais ........................... 17
3.3 Predição do Ruído em Dutos de Exaustão de Motores Estacionários (Diesel ou Gás) ..... 17
3.4 Validação dos Modelos Teóricos para Predição de Ruído em Dutos de Exaustão ........... 17
3.5 Parâmetros de Desempenho após o Tratamento Acústico de Dutos ................................. 19
4 FUNDAMENTOS TEÓRICOS E PRÁTICOS PARA O CONTROLE PASSIVO DE RUÍDO PARA PROPAGAÇÃO SONORA EM DUTOS..................................................... 20
4.1 Silenciador Resistivo – Modelo Empírico de Sabine ....................................................... 20
4.1.1 Perda por Transmissão ................................................................................................ 21
4.1.2 Algumas Características Construtivas de Silenciadores Resistivos ............................... 22
4.1.3 Características Gerais do Sistema Resistivo ................................................................. 23
4.2 Silenciador Reativo – Ressonador de Helmholtz............................................................. 24
4.2.1 Modelo de Parâmetros Concentrados Acústicos para um Ressonador de Helmholtz .... 25

XI
4.2.1.1 Massa acústica .......................................................................................................... 26
4.2.1.2 Complacência acústica ............................................................................................. 28
4.2.1.3 Resistência acústica .................................................................................................. 30
4.2.2 A Freqüência Natural e a Impedância Acústica de um Ressonador de Helmholtz......... 31
4.2.3 Largura da Banda da Meia-Potência ............................................................................ 36
4.2.4 Perda por Transmissão ................................................................................................ 37
4.2.5 Resistência Acústica Adicional .................................................................................... 40
4.2.6 Raio Ótimo do Furo em Função da Resistência Acústica Adicional ............................. 40
4.2.7 Número Ótimo de Furos em Função da Resistência Acústica Adicional ...................... 41
4.2.8 Algumas Características Construtivas de um Ressonador de Helmholtz ....................... 41
4.2.9 Características Gerais de um Sistema Ressonador de Helmholtz .................................. 42
4.3 Silenciador Reativo – Câmara de Expansão Simples ...................................................... 42
4.3.1 Perda por Transmissão ................................................................................................ 42
4.3.2 Algumas Características Construtivas de uma Câmara de Expansão Simples ............... 45
4.3.3 Características Gerais de uma Câmara de Expansão Simples ....................................... 45
4.4 Silenciador Reativo – Câmara de Expansão Dupla com um Duto de Conexão Interno .... 45
4.4.1 Perda por Transmissão ................................................................................................ 46
4.4.2 Algumas Características Construtivas de uma Câmara de Expansão Dupla .................. 46
4.4.3 Características Gerais de uma Câmara de Expansão Simples ....................................... 47
5 FUNDAMENTOS TEÓRICOS E PRÁTICOS PARA O CONTROLE ATIVO DE RUÍDO EM AVANÇO PARA PROPAGAÇÃO SONORA EM DUTOS.......................................... 48
5.1 Parte Física do Controle Ativo ....................................................................................... 49
5.1.1 Qualidade dos Sinais de Referência e de Erro .............................................................. 49
5.1.2 Distância de Separação entre o Sensor de Referência e a Fonte de Cancelamento ........ 50
5.1.3 Características de Resposta do Duto ............................................................................ 50
5.1.4 Análise da Velocidade de Volume Ótima Controlando a Densidade de Energia Potencial na Fonte de Cancelamento em um Duto Unidimensional ...................................................... 51
5.2 Parte Eletrônica do Controle Ativo de Ruído em Avanço ............................................... 53
5.2.2 O Erro Médio Quadrático ............................................................................................ 55
5.3 A Estratégia de Controle Ativo de Ruído em Avanço ..................................................... 61
5.3.2 A Identificação Prévia do Caminho Secundário )(ˆ zS . ................................................. 64
5.3.3 Cálculo do Número Ótimo de Coeficientes do Filtro Adaptativo ................................. 66
5.4 Algumas Características Construtivas de um Sistema de Controle Ativo de Ruído em Avanço ................................................................................................................................ 66
5.5 Características Gerais de um Sistema ANC em Avanço .................................................. 69
6 PROJETO DE SISTEMAS HÍBRIDOS DE DESEMPENHO ÓTIMO .............................. 70
6.1 Procedimento de Projeto Ótimo Híbrido de Controle de Ruído: Ressonador de Helmholtz e Silenciador Resistivo ......................................................................................................... 70
6.1.1 Procedimento Resumido: ............................................................................................. 70
6.1.2 Procedimento Detalhado: ............................................................................................ 70
6.2 Procedimento de Projeto Ótimo Híbrido de Controle de Ruído: Câmara de Expansão Simples ou Dupla com Absorção Sonora. ............................................................................. 79
6.2.1 Procedimento Resumido: ............................................................................................. 79
6.2.2 Procedimento Detalhado: ............................................................................................ 79

XII
7 RESULTADOS ................................................................................................................ 85
7.1 Projeto Ótimo Híbrido – Problema Prático 01 ................................................................ 85
7.1.1 Dados Utilizados para Inicializar o Projeto .................................................................. 85
7.1.2 Resultados do Projeto Ótimo Híbrido .......................................................................... 85
7.2 Projeto Ótimo Híbrido – Problema Prático 02 ................................................................ 88
7.2.1 Dados Utilizados para Inicializar o Projeto .................................................................. 88
7.2.2 Resultados do Projeto Ótimo Híbrido .......................................................................... 89
7.3 Projeto Ótimo Híbrido – Problema Prático 03 ................................................................ 91
7.3.1 Dados Utilizados para Inicializar o Projeto .................................................................. 91
7.3.2 Resultados do Projeto Ótimo Híbrido .......................................................................... 91
7.4 O Problema do Controle Ativo de Ruído em Duto .......................................................... 94
7.4.1 Validação Computacional da Rotina de Simulação para a Identificação do Caminho Secundário Utilizando o Algoritmo LMS ............................................................................. 94
7.4.2 Simulação Computacional para Análise Teórica da Estratégia de Controle Ativo Utilizando o Algoritmo FXLMS .......................................................................................... 95
7.4.3 Testes de Desempenho da Identificação do Caminho Secundário em Tempo Real ....... 96
7.4.4 Análise da Velocidade de Volume Ótima na Fonte de Cancelamento para Ruído Periódico.............................................................................................................................. 97
7.4.5 Testes de Desempenho do Controle Ativo de Ruído em Tempo Real para Ruído Periódico............................................................................................................................ 101
7.4.6 Modelo Computacional FEM – Análise 3D da Propagação Sonora no Duto de Exaustão .......................................................................................................................................... 110
7.4.7 Modelo Computacional BEM – Análise 3D dos Modos Acústicos no Duto de Exaustão .......................................................................................................................................... 112
7.4.8 Análise Computacional da Influência Térmica do Escoamento no Duto de Cancelamento .......................................................................................................................................... 113
7.5 Projeto Ótimo Híbrido – Problema Prático 04 .............................................................. 116
7.5.1 Dados Utilizados para Inicializar o Projeto ................................................................ 116
7.5.2 Resultados do Projeto Ótimo Híbrido ........................................................................ 117
8 CONCLUSÃO ................................................................................................................ 120
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................ 123
APÊNDICE A: ALGORITMOS LMS MODIFICADOS .................................................... 127
A.1 O Método LMS Normalizado ...................................................................................... 127
A.2 Método LMS de Correlação ........................................................................................ 127
A.3 O Método LMS com Vazamento ................................................................................. 128
A.4 O Método LMS com o Passo Variável ......................................................................... 129
A.5 O Método LMS com Assinatura .................................................................................. 130
APÊNDICE B: ROTINAS COMPUTACIONAIS .............................................................. 131
B.1 Rotina Computacional para a Simulação da Identificação do Caminho Secundário ...... 131
B.2 Rotina Computacional para a Simulação do Controle Ativo de Ruído Utilizando o Algoritmo FXLMS............................................................................................................. 132
B.3 Coeficientes dos filtros IIR utilizados nas rotinas de simulação computacional ............ 133
B.4 Rotina Computacional para a Identificação do Caminho Secundário e Estimação dos Coeficientes Ótimos do Filtro Adaptativo em Tempo Real ................................................. 133
B.5 Rotina Computacional para o Controle Ativo de Ruído em Avanço em Tempo Real.... 134
XIII
B.6 Sub-Rotina FIR ........................................................................................................... 135
B.7 Sub-Rotina IIR ............................................................................................................ 136
APÊNDICE C: ESTRUTURA PARA TESTES ................................................................. 138
C.1 Planta Experimental: Dispositivo para a Identificação do Caminho Secundário ........... 138
C.2 Planta Experimental: Dispositivo para o Controle Ativo de Ruído ............................... 138
C.3 Equipamento de Medição Sonora Utilizado ................................................................. 140

XIV
LISTA DE FIGURAS
Figura 3.1 - Exemplo de propagação sonora de uma onda plana em um duto e um sistema
análogo mecânico................................................................................................15
Figura 4.1 - Exemplos de silenciadores resistivos: a) de lamelas paralelas;
b) de lamelas concêntricas...................................................................................20
Figura 4.2 - Atenuador resistivo instalado no meio da chaminé de exaustão...........................22
Figura 4.3 - Atenuador resistivo de lamelas paralelas instalado na saída da chaminé
de exaustão..........................................................................................................23
Figura 4.4 - Desenho isométrico 3D e em corte de um ressonador de Helmholtz
acoplado a um duto principal...............................................................................24
Figura 4.5 - Curva de ressonância.............................................................................................25
Figura 4.6 - Desenho esquemático do modelo de parâmetros concentrados para um
circuito elétrico....................................................................................................31
Figura 4.7 - Desenho esquemático do modelo de parâmetros concentrados para
um ressonador de HelmHoltz..............................................................................34
Figura 4.8 - Ilustração da largura da banda de meia potência...................................................36
Figura 4.9 - Desenho esquemático do ressonador acoplado lateralmente ao duto
principal e o sistema de coordenadas...................................................................38
Figura 4.10 - Desenho isométrico e em corte de uma câmara de expansão simples
acoplada a um duto..............................................................................................42
Figura 4.11 - Desenho isométrico e em corte de uma câmara de expansão dupla com
um duto de ligação...............................................................................................45
Figura 5.1 - Esquema de um sistema de controle ativo em avanço aplicado em um duto........48
Figura 5.2 - Método de montagem dos microfones para reduzir a turbulência do
escoamento...........................................................................................................50
Figura 5.3 - Velocidade de volume ótima.................................................................................52
Figura 5.4 – Análise das freqüências passíveis de controle entre 150 e 200Hz,
para uma velocidade de volume ótima entre 0 e 1, variando-se xs:
(a) xs = 1m; (b) xs = 2m; (c) xs = 3m; (d) xs = 4m...............................................53
Figura 5.5 - Diagrama de blocos de um filtro digital FIR.........................................................54
Figura 5.6 - Diagrama de blocos de um filtro adaptativo.........................................................55
Figura 5.7 – Superfície de desempenho 2D..............................................................................56
XV
Figura 5.8 - Fluxograma do controle ANC em tempo real.......................................................62
Figura 5.9 - Fluxograma para a obtenção da estimativa do caminho secundário (S^)..............65
Figura 5.10 - Desenho esquemático de um sistema de controle ativo de ruído
aplicado à chaminé de exaustão...........................................................................67
Figura 5.11 - Caixa acústica especial, tri-partida, para geração e captação do ruído
principal...............................................................................................................68
Figura 5.12 - Caixa acústica para geração do ruído de cancelamento......................................69
Figura 6.1 – Fluxograma do procedimento 01..........................................................................78 Figura 6.2 – Fluxograma do procedimento 02..........................................................................84 Figura 7.1 - Sistema de exaustão com controle de ruído ótimo................................................87
Figura 7.2 - Sistema de exaustão a ser tratado..........................................................................90
Figura 7.3 - Tubulação do sistema de exaustão de um motor estacionário a diesel tratado
com câmara de expansão. Na vista lateral: 1) silenciador; 2)
suporte; 3) tubulação de exaustão existente.........................................................92
Figura 7.4 - Painel frontal representando os parâmetros de entrada e de saída para a
validação do código.............................................................................................94
Figura 7.5 - Comparação gráfica entre o ruído branco “desejado” (cor branca) e o ruído branco
adaptado (cor vermelha)..............................................................................................................95
Figura 7.6 - Ruído de cancelamento da fonte secundária.........................................................96
Figura 7.7 - Sinal do microfone de erro localizado à jusante da fonte......................................96
Figura 7.8 - Planta experimental para testes.............................................................................96
Figura 7.9 - Representação gráfica entre os sinais desejado e adaptado para um tamanho
de passo ótimo igual: a) passo igual 1x10-6, filtro 16 pesos, tempo de
convergência de 1001ms; b) passo igual 1x10-6, filtro com 32 pesos,
tempo de convergência de 1167ms; c) passo igual a 1x10-7, filtro com 64
pesos, tempo de convergência de 2683ms; d) passo igual a 1x10-7, filtro com
128 pesos, tempo de convergência de 4826ms....................................................97
Figura 7.10 - A velocidade de volume ótima teórica................................................................98
Figura 7.11 - Localização dos pontos de medição: a) ponto 1 refere-se à posição do
alto-falante de geração / microfone de captação; b) ponto 2 refere-se à
posição do alto-falante de cancelamento / microfone de captação;
c) ponto 3 refere-se à posição do microfone de erro...........................................99
Figura 7.12 - FRF entre o sinal de erro (3) e o sinal da fonte de geração / captação
(1) e a coerência da medição............................................................................100
Figura 7.13 - FRF entre o sinal de erro (3) e o sinal da fonte de cancelamento (2)
XVI
e a coerência da medição...................................................................................100
Figura 7.14 - Velocidade de volume ótima para o alto-falante de cancelamento...................100
Figura 7.15 - Desempenho do controle ativo de ruído em 250Hz: a) painel de
controle indicando a emissão de ruído no alto-falante de geração,
sem controle; b) espectro sonoro correspondente a (a) medido a 1m
da saída do duto.................................................................................................102
Figura 7.16 - Desempenho do controle ativo de ruído em 250Hz: a) painel de
controle indicando o sistema ativo estabilizado; b) espectro
sonoro correspondente a (a) medido a 1m da saída do duto.............................103
Figura 7.17 - Espectro sonoro do ruído de fundo medido 1m da saída do duto.....................104
Figura 7.18 - Desempenho do controle ativo de ruído em 260Hz: a) painel
de controle indicando a emissão de ruído no alto-falante de
geração, sem controle; b) espectro sonoro correspondente a (a) medido
a 1m da saída do duto........................................................................................105
Figura 7.19 - Desempenho do controle ativo de ruído em 260Hz: a) painel
de controle indicando o sistema ativo instável; b) espectro
sonoro correspondente a (a) medido a 1m da saída do duto.............................106
Figura 7.20 - Desempenho do controle ativo de ruído em 260Hz: a) espectro
sonoro do sistema divergindo; (b) espectro sonoro do sistema divergindo......107
Figura 7.21 - Desempenho do controle ativo de ruído em 260Hz: a) painel
de controle indicando um som divergindo no alto-falante de
cancelamento, sistema instável; b) espectro sonoro correspondente
a (a) medido a 1m da saída do duto..................................................................109
Figura 7.22 - Espectro sonoro do ruído de fundo medido 1m da saída do duto.....................110
Figura 7.23 - Validação do modelo teórico: (a) resultado experimental medido
a 1m da saída do tubo; (b) modelagem computacional 3D,
utilizando o método dos elementos de contorno BEM......................................111
Figura 7.24 - Modelagem computacional 3D, utilizando o método dos elementos
finitos FEM........................................................................................................112
Figura 7.25 - Domínio analisado.............................................................................................113
Figura 7.26 - Campo de velocidade........................................................................................114
Figura 7.27 - Detalhe do campo de escoamento.....................................................................114
Figura 7.28 - Campo de temperatura ao longo da superfície da tubulação.............................115
Figura 7.29 - Detalhe da distribuição de temperatura na derivação........................................115
XVII
Figura 7.30 - Velocidade de volume ótima para a freqüência de 250Hz................................119
Figura B1 – Diagrama de blocos do código utilizado para a simulação
computacional da identificação do caminho secundário do sinal......................131
Figure B2 – Diagrama de blocos do código de controle ANC utilizando-se
o algoritmo FXLMS...........................................................................................132
Figura B3 – Diagrama de blocos do código embarcado para identificação de
sistemas em “tempo real”...................................................................................134
Figura B4 – Diagrama de blocos do código embarcado para o controle ativo de
ruído em avanço em “tempo real”......................................................................135
Figura B5 – Diagrama de blocos da sub-rotina FIR...............................................136
Figura B6 – Diagrama de blocos da sub-rotina IIR................................................137
Figura C1 – Montagem experimental para a identificação do caminho secundário,
em tempo real, utilizando-se filtragem adaptativa.............................................138
Figura C2 – Arranjo experimental para o controle ativo de ruído..........................................139
Figura C3 – Rack contendo todos os equipamentos utilizados na alimentação,
amplificação e controle do sistema ANC...........................................................140
Figura C4 – Planta experimental para o controle ativo de ruído.............................................140
XVIII
LISTA DE TABELAS
Tabela 3.1 - Espectro de fonte típica.........................................................................................18
Tabela 7.1 - Dimensões do primeiro ressonador de Helmholtz para o problema 01................86
Tabela 7.2 - Dimensões do Segundo ressonador de Helmholtz para o problema 01................86
Tabela 7.3 - Dimensões do silenciador resistivo para o problema 01.......................................86
Tabela 7.4 - Desempenho do projeto ótimo híbrido para o problema 01.................................87
Tabela 7.5 - Dimensões do primeiro ressonador de Helmholtz................................................89
Tabela 7.6 - Dimensões do segundo ressonador de Helmholtz................................................89
Tabela 7.7 - Dimensões do terceiro ressonador de Helmholtz..................................................89
Tabela 7.8 - Dimensões do silenciador resistivo.......................................................................89
Tabela 7.9 - Desempenho do projeto ótimo híbrido.................................................................90
Tabela 7.10 - Dimensões da câmara de expansão dupla...........................................................92
Tabela 7.11 - Desempenho do projeto ótimo híbrido...............................................................93
Tabela 7.12 - Resultados listados correspondentes às situações descritas na
Figura 15............................................................................................................104
Tabela 7.13 - Resultados listados correspondentes às situações descritas na
Figura 7.16.......................................................................................................108
Tabela 7.14 - Resultados listados correspondentes às situações descritas na
Figura 7.17.......................................................................................................108
Tabela 7.15 - Temperaturas médias........................................................................................116
Tabela 7.16 - Dimensões do atenuador resistivo....................................................................117
Tabela 7.17 - Desempenho do projeto ótimo para o processo 01...........................................117
Tabela 7.18 - Principais parâmetros físicos e elétricos do sistema de controle ativo.............118
Tabela 7.19 - Desempenho do projeto ótimo híbrido para o processo 02...............................119
Tabela B1 - Coeficientes das funções de transferência que representam os caminhos principal e secundário (Kuo et. al., 1996)..........................................................133
Tabela C1 – Equipamentos utilizados.....................................................................................141

XIX
NOMENCLATURA
a - raio do orifício [m]
Ai - Ponderação pela curva subjetiva A [dB]
Aint - Área interna livre [m2]
Β - Correção do nível de potência sonora total
c - velocidade de propagação sonora [m/s]
C – Capacitância [m6/kg]
CA - Complacência acústica [m3/Pa]
CE – Capacitância [Faraday]
CF - Potência sonora específica em bandas de uma oitava [dB]
CM - complacência mecânica [m/N]
d(n) - Resposta desejada no tempo discreto n
θθθθDI - diretividade da fonte sonora
DSP – Processamento digital de sinais (Digital Signal Processo)
e - Espessura da parede do duto [m]
e(n) – erro absoluto
e2(n) - Erro quadrático instantâneo
E - Tensão atuante [V]
Ev - Eficiência do ventilador [%]
E[ ] - Valor esperado
fs - Freqüência de amostragem por canal da placa de controle [ks/s]
Fsistema - Força mecânica atuando no sistema [N]
H(z) - Função de transferência do caminho secundário
i - Corrente elétrica [A]
I – Corrente total do circuito elétrico [A]
k - Número de pás do rotor
kmola - Constante da mola [N/m]
cfK /ππππ2= - Número da onda [rad/m]
L - Indutância elétrica [kg/m4]
câmaraL - Comprimento de uma das câmaras de expansão [m]
Ldisp - Comprimento disponível do duto [m]
dutoL - Comprimento do duto de conexão das câmaras [m]
XX
LE – Indutância elétrica [H]
Ltubulação - Comprimento da tubulação de exaustão [m]
Lsilenciador - Comprimento do silenciador [m]
m - Massa do sistema [kg]
M - Massa molecular
MA - Massa acústica [kg/m4]
n - Ordem do filtro digital
Nfuros - Número de furos do ressonador
Ntela - Número de camadas de tela
NWS0 - Nível de potência sonora na ressonância [dB]
NWS - Nível de potência sonora na freqüência arbitrária f [dB]
p - Pressão sonora [Pa]
pc - Pressão sonora no interior da câmara [Pa]
p0 - Pressão atmosférica [Pa]
p1 - Pressão sonora incidente [Pa]
p2 - Pressão sonora remanescente [Pa]
pr
- Vetor coluna da correlação cruzada entre a resposta desejada e o vetor entrada
P - Potência do motor [kW]
Pint - Perímetro interno absorvente [m]
PI - Perda por inserção [dB]
PT - Perda por transmissão [dB]
PTadm - Perda por transmissão admissível para o silenciador [dB]
( )[ ]nxEPx
2= - Potência sonora do sinal x(n)
P(z) - Função de transferência do caminho primário
Q - Vazão volumétrica [m3/s]
Qp - Velocidade de volume da fonte principal [m3/s]
sQ - Velocidade de volume da fonte secundária [m3/s]
Q - Matriz de autovetores
RA - Resistência acústica [Pa.s/m3]
RE - Resistência elétrica [ohm]
Rc - Resistência acústica especifica total [Pa-s/m]
Rc1 - Resistência acústica específica da tela escolhida [Pa-s/m]
Rdisp - Resistência acústica especifica disponibilizada [Pa-s/m]
Rf - Resistência interna da fonte [ohm]
XXI
Rl - resistência interna do indutor [ohm]
RM - Resistência mecânica ou o coeficiente de amortecimento [N.s.m-1]
RR - Redução de ruído [dB]
Rtela - Resistência acústica específica para uma tela metálica [Pa-s/m]
R – Matriz de correlação
ℜℜℜℜ - Parte real
Sduto - Área da seção transversal do duto principal [m2]
mS
S≡
1
2 - Razão das áreas das seções
( )zS - Função de transferência estimada do caminho secundário
tr – Traço de uma matriz Tfreq - Período da freqüência a ser tratada [s]
Top - Temperatura de operação [K]
TP - Temperatura de projeto [K]
T0 - Temperatura ambiente [K]
U - Fluxo volumétrico [m3/s]
Uc - Fluxo volumétrico acústico na câmara [m3/s]
Uinc - Fluxo volumétrico à montante da junção
Um - Amplitude do sinal
Urem - Fluxo volumétrico à jusante da junção
U% - umidade relativa do ar [%]
V - Volume do sistema [m3]
Vmax - Velocidade máxima de escoamento [m/s]
x’(n) - Sinal de referência filtrado utilizado pelo algoritmo FXLMS
)n(xr
- Vetor do sinal de referência
XA - Reatância acústica [Pa-s/m3]
y(n) – Sinal de saída de um filtro digital no tempo discreto n
ZA - Impedância acústica [Pa-s/m3]
TZ - Impedância total do circuito [Pa-s/m3]
Z0 - Impedância característica [Pa-s/m]
)n(wr
- Vetor dos pesos do filtro FIR
0wr
- Solução ótima para )n(wr
wl(n) - Coeficientes do filtro
XXII
lw - l-ésimo coeficiente do filtro de predição do caminho secundário
( )zW – Função de transferência do caminho secundário identificada previamente
W - Potência mecânica [cv]
W0 - Potência sonora de ressonância [W]
W1=W2 - Potências sonoras [W]
W(z) - Filtro adaptativo atualizado pelo algoritmo FXLMS
µµµµ - Fator de convergência
LETRAS GREGAS
αααα - Coeficiente de absorção sonora
tαααα - Coeficiente de transmissão da potência sonora [Pa.s/m3]
( )nξξξξ∇ - Gradiente da função erro com relação aos coeficientes
p∆ - Incremento de pressão através do ventilador [Pa]
NWS∆ - Decaimento do nível de potência sonora [dB]
∆Rress - Acréscimo na resistência total devido à presença de tela
( ) lwn ∂∂ξξξξ - Derivada direcional
( ) )]([ neEn 2≡ξξξξ - Erro médio quadrático
minξξξξ - Erro médio quadrático mínimo
λλλλ - Comprimento de onda [m]
ΛΛΛΛ - Matriz diagonal de autovalores de R
µµµµ - Viscosidade do gás no interior do tubo
ρρρρ - Massa específica [kg/m3]
0ρρρρ - Massa específica do gás em escoamento [kg/m3]
v - Velocidade da massa [m/s]
ωωωω - Freqüência angular da onda sonora [rad/s]
0ωωωω - Freqüência angular de ressonância [rad/s]
γγγγ - Razão de calores específicos para o gás
Ω - Ângulo sólido disponibilizado para a fonte de livre propagação [rad]
1
1 INTRODUÇÃO
1.1 Visão Geral do Problema
Um dos principais problemas do ambiente industrial trata-se da presença de fontes de
poluição sonora que impactam de forma decisiva a saúde do trabalhador, bem como o conforto e o sossego público. O nível de ruído aceitável nestes ambientes é estabelecido por normas baseadas em critérios técnicos internacionais e por legislações federal, estadual e, em alguns casos, também municipal. Desta forma, tornam-se necessárias intervenções para que os níveis dos sons indesejados não ultrapassem os valores recomendados pelas normas e legislações aplicáveis.
As intervenções para a adequação dos níveis sonoros podem ser realizadas
basicamente visando três aspectos distintos: atuação na fonte, modificações na trajetória de transmissão sonora ou, complementarmente, proteção individual no homem, (Gerges, 1992), (Snyder, 2000) e (Bistafa, 2006). As intervenções na fonte e na trajetória são prioritárias quando viáveis tecnicamente. Para isso, a análise dos aspectos econômicos é de fundamental importância, pois caso a solução encontrada seja muito cara, ela provavelmente não será implantada.
Os seguintes dispositivos são freqüentemente empregados para atenuar ou absorver a energia sonora que se propaga em escoamentos de fluidos no interior de dutos: i) silenciadores passivos reativos (ou reflexivos); ii) silenciadores passivos resistivos (ou absorventes); iii) silenciadores passivos combinados (reativo/resistivo); iv) sistemas de controle ativo de ruído.
Os silenciadores resistivos são utilizados para atenuação do ruído nas médias e altas freqüências. Por exemplo, na admissão ou na exaustão de sopradores de ar para alto-fornos, na descarga de sistemas de exaustão industrial, na admissão de ar de motores de combustão interna, entre outros. Existem dificuldades inerentes a estes silenciadores, como a significativa queda de pressão e, dependendo da velocidade do escoamento, o ruído autogerado (Gerges (1992), Snyder (2000) e Bistafa (2006)). Os silenciadores reativos são mais eficazes nas baixas freqüências (menores do que 500Hz) enquanto os silenciadores resistivos são mais eficazes nas altas freqüências (acima de 1000Hz). Silenciadores reativos são também indicados quando não é possível utilizar-se silenciadores resistivos, por exemplo, em sistemas de exaustão de gases agressivos e de elevadas temperaturas, nos quais o material absorvente sofrerá desintegração (Beranek e Vér (1992), Gerges (1992) e Bistafa (2006)). A aplicação típica de silenciadores reativos está na exaustão de motores de combustão interna (Barron, 2003). São também utilizados em sistemas que geram tons puros, sendo sintonizados para atenuarem sons em freqüências específicas. Nesses casos, haverá freqüências nas quais não ocorrerá qualquer atenuação dos níveis sonoros. Os elementos básicos tipicamente utilizados no projeto de silenciadores reativos incluem câmaras de expansão, ressonadores em ramificações e tubos perfurados. Segundo Snyder (2000), o controle ativo de ruído apresenta grande potencial de aplicação industrial. Existem muitos trabalhos científicos direcionados ao controle ativo de ruído para a redução de ruído de ventiladores industriais, redução de ruído de escapamento de
2
motor automotivo e redução de ruído no compartimento de passageiros de carros, caminhões ou aviões (Kuo e Morgan, 1996).
Trabalhos recentes demonstraram a eficácia do controle ativo de ruído em avanço aplicado em dutos de ventilação (Tobias et. al., 2005). De fato, os sistemas de controle ativo de ruído, aplicados em dutos de ar condicionado, não apenas são mais eficazes em baixas freqüências do que os silenciadores convencionais, como também reduzem em até 40% a carga sobre os ventiladores (Wise et. al., 1992). A utilização de técnicas de controle ativo de ruído concentra-se na faixa de baixas freqüências, já que o controle em altas freqüências, usando-se processadores digitais (DSPs), é ainda de difícil implementação. Isso é devido à alta velocidade requerida para processar a grande quantidade de informação. Além disso, para a faixa de altas freqüências, o controle passivo é uma solução consagrada pela sua eficácia e baixo custo. Já para baixas freqüências, o controle ativo representa uma solução viável e de baixo custo para a maioria dos casos práticos (Tobias et. al., 2005). Outros benefícios dos sistemas de controle ativo em dutos são também o baixo peso do sistema e a facilidade de serem montados em espaços restritos em arranjos de dutos já existentes ou em edificações restauradas onde se faz necessária a instalação de um sistema de ar condicionado. Na literatura técnica, normalmente, os modelos matemáticos utilizados nos projetos de silenciadores passivos primam ou pela resistividade do material absorvente, ou pela reflexão da onda sonora (Kinsler et. al. (1982), Gerges (1992), Beranek e Ver (1992), Beranek (1996), Snyder (2000) e Bistafa (2006)). (Barron, 2003) apresenta modelos matemáticos de silenciadores passivos que incorporam simultaneamente a resistividade do material absorvente ou de telas metálicas e a reflexão da onda sonora pela expansão súbita, caracterizando-se, portanto, um sistema passivo combinado. Silenciadores combinados têm sido largamente utilizados na redução do ruído de exaustão de motores de combustão interna, conforme mostra (Bistafa, 2006). Porém, em seu livro, não é apresentado um procedimento de projeto para os silenciadores combinados.
De acordo com a pesquisa bibliográfica realizada, não existe disponível na literatura técnica sobre sistemas de controle de ruído em dutos industriais de exaustão, um procedimento de projeto que incorpore controle ativo e passivo simultaneamente, utilizando todas as técnicas disponíveis numa proporção ótima. De fato, as soluções de engenharia acústica aplicada ao controle de ruído em dutos de exaustão, especialmente as adotadas pela indústria brasileira, elaboradas em sua grande maioria por empresas nacionais especializadas no assunto, não têm explorado soluções híbridas. Isso ocorre talvez por desconhecimento técnico, ou por falta de procedimentos de projeto híbrido disponíveis na literatura, ou por comodismo tecnológico.
1.2 Motivação para o Desenvolvimento desta Tese
Conforme já comentado, não estão disponíveis na literatura técnica brasileira e internacional metodologias de projeto de sistemas para o controle de ruído em dutos de exaustão industriais que utilizem de uma forma otimizada técnicas passivas, sejam resistivas ou reativas, complementadas por uma estratégia de controle ativo. Em outras palavras, existe uma demanda por procedimento de projeto de sistemas de controle de ruído em dutos industriais que vá além dos paradigmas atuais de projeto, possibilitando soluções mais competitivas do ponto de vista econômico.
3
1.3 Objetivo do Trabalho
Diante do exposto, o objetivo desta tese é propor um procedimento de projeto ótimo de
sistemas híbridos de controle de ruído em dutos industriais de exaustão de gases, ou seja, que faça uso de todas as técnicas disponíveis na proporção ótima, de acordo com sua adequação ao problema a ser resolvido.
A metodologia proposta fará uso dos fundamentos e procedimentos presentes nos
principais livros disponíveis sobre o assunto e de alguns artigos científicos com recentes contribuições práticas, além de conceitos da teoria de otimização.
1.4 Objetivos Específicos desta Tese
Para a proposição de um procedimento de projeto ótimo híbrido de controle de ruído, os seguintes objetivos específicos foram realizados:
i. Pesquisa do estado da arte das técnicas passivas e ativas de controle de ruído, visando escolher os modelos teóricos e empíricos a serem adotados;
ii. Implementação computacional de modelos analíticos, baseados em filtragem
adaptativa, para identificar e controlar em tempo real uma planta de testes experimentais;
iii. Elaboração do procedimento de projeto ótimo de sistemas híbridos na forma de um
algoritmo;
iv. Aplicação do algoritmo para a solução de três problemas reais de propagação de ruído em dutos de exaustão e um do tratamento da abertura de ventilação de uma cabine acústica;
v. Aplicação da técnica de controle ativo proposta no procedimento híbrido a uma
planta experimental. Para isso, como contribuição tecnológica complementar, foi elaborada uma solução construtiva que minimiza os efeitos da realimentação da fonte de cancelamento no microfone de captação.
1.5 Contribuições Científicas do Presente Trabalho
Como não existe material literário disponível que aborde integralmente a elaboração de
um projeto ótimo de sistemas híbridos para o controle de ruído aplicado a dutos industriais, a presente tese irá preencher uma lacuna científica. Trata-se de um texto científico de caráter aplicado com benefícios tecnológicos imediatos, combinando de uma forma organizada princípios e técnicas de áreas distintas, embora correlacionadas.
4
1.6 Relevância Tecnológica do Presente Trabalho
O presente trabalho científico, voltado para a aplicação da engenharia acústica
industrial, irá disponibilizar uma metodologia de projeto ótimo ainda não difundida e alternativa aos métodos tradicionais de projeto de silenciadores em dutos de exaustão industrial. Representa, portanto, um avanço na metodologia de projeto da Acústica Aplicada ao Controle de Ruídos Industriais.
Acredita-se que a presente pesquisa forneça às empresas especializadas no tratamento acústico industrial condições de desenvolverem dispositivos e sistemas de controle de ruído mais confiáveis do ponto de vista tecnológico, do que os atuais, com redução global de custos operacionais de máquinas e equipamentos, de materiais e de implantação.
1.7 Desenvolvimento do Trabalho
Dando seqüência ao trabalho, no Capítulo 2 é apresentada uma revisão bibliográfica das principais técnicas de controle passivo e de controle ativo de ruído em dutos. Uma abordagem da acústica de dutos, levando-se em consideração a propagação de campos sonoros em dutos, é apresentada no Capítulo 3. Ao longo do capítulo, são discutidos os modos acústicos característicos, a impedância acústica e os modelos empíricos para a predição da potência sonora de ventiladores e motores de combustão interna em dutos de exaustão. O Capítulo 4 apresenta os fundamentos teóricos e práticos necessários para o dimensionamento de silenciadores resistivos e silenciadores reativos de um ou múltiplos estágios. Apresentam-se as características construtivas específicas de cada dispositivo de controle de ruído. O Capítulo 5 fornece os fundamentos teóricos e práticos para a implementação de um sistema de controle ativo de ruído em avanço em dutos, utilizando filtragem adaptativa baseada no algoritmo de mínimos quadrados (LMS) como estratégia de controle. Outras versões do algoritmo LMS são apresentadas no Apêndice A. As rotinas computacionais implementadas para a aplicação da estratégia de controle são apresentadas no Apêndice B, enquanto a estrutura de testes é apresentada no Apêndice C. O Capítulo 6 propõe uma metodologia para o projeto de sistemas ótimos híbridos utilizando as técnicas de controle abordadas anteriormente. Para cada técnica específica, a metodologia propõe uma utilização organizada das equações teóricas e empíricas pertinentes. O Capítulo 7 apresenta soluções obtidas utilizando-se o procedimento proposto para três problemas práticos atuais. Os dois primeiros referem-se à atenuação sonora do ruído proveniente da exaustão de ventiladores em sistemas industriais, enquanto o terceiro refere-se à atenuação sonora do ruído proveniente da exaustão de um motor de combustão interna estacionário. Além disso, como perspectiva, apresenta-se a solução do problema do tratamento de uma abertura para ventilação de uma cabine acústica existente, tendo em vista dois processos distintos no interior da cabine. Ao final do capítulo, são também apresentados resultados experimentais obtidos para o controle ativo de ruído em uma planta construída em laboratório da UFMG.

5
Finalmente, o Capítulo 8 apresenta algumas considerações finais relevantes e as principais conclusões deste trabalho, além de algumas sugestões para trabalhos futuros.
6
2 REVISÃO BIBLIOGRÁFICA A presente revisão bibliográfica é dedicada ao problema de propagação sonora no interior de dutos. A prática do controle de ruído em dutos apresenta uma larga variedade de técnicas para solucionar o problema de emissão de ruídos, as quais podem ser divididas em dois grandes grupos: as técnicas passivas de controle de ruído e as técnicas ativas de controle de ruído (Snyder, 2000).
2.1 Técnicas Passivas de Controle de Ruído
Segundo Munjal (1987), Beranek e Vér (1992), Gerges (1992), Snyder (2000), Barron
(2003), Costa (2003) e Bistafa (2006) as técnicas passivas de controle de ruído são subdivididas em duas categorias: aquelas que alteram a impedância do duto (técnicas passivas reativas); aquelas que absorvem a energia acústica (técnicas passivas resistivas)1. Nas últimas quatro décadas as técnicas passivas de controle de ruído foram o foco em muitos programas de pesquisa, possibilitando um maior entendimento dos princípios físicos envolvidos e resultando em melhores métodos de projeto. Os trabalhos fundamentais nesta área foram os de Morse, (1939) e Cremer, (1953), que não consideram a influência do escoamento de fluidos no desempenho acústico dos silenciadores analisados. Similarmente, o primeiro cálculo sistemático de silenciadores, desconsiderando ainda a influência de escoamento, foi conduzido por (Davis et. al., 1954). Estes trabalhos foram seguidos por numerosas investigações teóricas e experimentais que incluíram no estudo importantes aspectos decorrentes do escoamento (distribuição de temperatura, distribuição de velocidade etc.) e a incorporação de novos componentes internos (dutos perfurados, câmaras de expansão, ressonadores etc.)
Wallace Clement Sabine, 1868-1919, Professor de física da Universidade de Harvard, nos Estados Unidos, é considerado o pai da acústica moderna, tendo sido pioneiro em aplicar o método científico ao estudo da acústica em recintos fechados. É dele a definição de coeficiente de absorção sonora e a famosa fórmula experimental de Sabine (Bistafa, 2006), utilizada para a predição do desempenho de silenciadores resistivos aplicados em dutos (Gerges, (1992), Costa (2003) e Bistafa, (2006)). A referida equação considera as ondas incidentes, as ondas refletidas e as ondas transversais no interior de um duto tratado internamente com material absorvente. Em seu livro, Gerges (1992) apresenta resultados teóricos de desempenho acústico de silenciadores resistivos retangulares, aplicando a fórmula empírica de Sabine. São verificadas várias configurações de lamelas paralelas e alternadas, bem como várias configurações de seção transversal. Também, é avaliado o desempenho acústico para várias células paralelas, variando-se a espessura das lamelas e os comprimentos.
Gerges, (1992), visando a modelagem de silenciadores reativos, tais como ressonadores de Helmholtz, câmara de expansão simples ou câmaras de expansão dupla interconectadas por duto interno, aborda teoricamente a propagação sonora bidimensional em dutos retos de
1 Seguindo as referências bibliográficas pesquisadas, ao longo deste trabalho, os termos silenciadores reativos e silenciadores resistivos são usados genericamente para se referirem a quaisquer dispositivos de controle passivo de ruído analisados e projetados através de técnicas passivas reativas e resistivas, respectivamente. Nomes específicos são introduzidos juntamente com os termos genéricos para permitir a diferenciação entre dispositivos específicos dentro de uma mesma técnica. Por exemplo: silenciador reativo (câmara de expansão); silenciador reativo (ressonador de Helmholtz).

7
paredes rígidas, a reflexão e a ressonância de ondas em dutos e a teoria geral de abertura lateral em dutos, (Kinsler et. al. (1982) e Munjal (1987)). Beranek e Vér (1992) apresentam estudos analíticos para a modelagem matemática de silenciadores reativos utilizando uma aproximação por matriz de transferência. A técnica de matriz de transferência, inicialmente proposta para a descrição de sistemas mecânicos (Pipes, (1940) e Molloy, (1957)), foi utilizada, através de análogos elétricos, para descrever a propagação sonora de ondas planas em componentes internos dos silenciadores reativos. Os primeiros trabalhos nesta linha de pesquisa (Igarashi e Toyama (1958) e Fukuda e Okuda (1970)) não consideraram a influência do escoamento do fluido no desempenho acústico dos componentes internos dos silenciadores. Trabalhos subseqüentes (Alfredson e Davies (1971) e Munjal (1975)) adicionaram aos modelos de matriz de transferência para silenciadores reativos a influência do escoamento de fluidos no desempenho dos componentes internos. O desempenho previsto para vários silenciadores reativos utilizando o método da matriz de transferência, considerando a influência de escoamento do fluido, concordou com dados experimentais obtidos por Thawani e Doige (1983). Para o estudo de silenciadores resistivos com seções transversais retangulares ou circulares, contendo lamelas paralelas ou concêntricas, respectivamente, Beranek e Vér (1992) utilizam gráficos normalizados para predizer o desempenho dos silenciadores. Esses gráficos levam em consideração, como ordenada, a atenuação normalizada em decibel e, como abscissa, a freqüência normalizada, abrangendo vários materiais absorventes e vários percentuais de área aberta da seção transversal dos silenciadores. Os resultados de desempenho são válidos para todas as temperaturas e gases em geral. Barron, (2003), no estudo de silenciadores reativos do tipo ressonadores de Helmholtz acoplados lateralmente em um duto principal, utiliza a abordagem de sistemas por parâmetro concentrado, através de analogia com sistemas mecânicos ou elétricos. Visando o dimensionamento de câmaras de expansão simples e dupla, (Gerges, 1992) também aborda teoricamente a propagação sonora bidimensional em dutos retos de paredes rígidas, a reflexão de ondas em dutos e a teoria geral utilizada na análise da perda por transmissão de paredes simples. Por sua vez (Barron, (2003)), para a análise e projeto de silenciadores dissipativos, apresenta um modelo matemático que estima a perda por transmissão (em decibel) considerando a atenuação sonora proporcionada pelo material absorvente (parte resistiva do modelo) e a reflexão da energia acústica de volta à fonte sonora (parte reativa do modelo). Portanto, constitui um modelo híbrido. Segundo (Barron, 2003), a principal dificuldade em se utilizar este modelo está no cálculo do coeficiente de atenuação sonora do material absorvente utilizado, referente à parte resistiva da equação matemática, uma vez que as melhores fontes de informação são os dados experimentais do material absorvente, em muitos casos, não disponibilizados pelo fabricante do material. Assim, para o projeto do silenciador, antes de construí-lo, há a necessidade de se estimar o coeficiente de atenuação (Barron, 2003). Por outro lado, como o cálculo do coeficiente de atenuação não é trivial, após a construção do dispositivo, um protótipo deve ser testado para se verificar os cálculos do projeto.
Outras técnicas de modelagem utilizadas na análise e no projeto de silenciadores incluem aplicações do método dos elementos finitos (Munjal, 1987) ou do método dos elementos do contorno (Seybert e Cheng, 1987). De forma geral, estas técnicas são de difícil implementação e limitadas a uma faixa restrita de aplicações (Beranek e Vér, (1992)). Por exemplo, no caso da modelagem numérica de silenciadores resistivos ou reativos para análises

8
de desempenho em altas freqüências, há a necessidade de se gerar malhas muito refinadas. Isso requer um grande esforço computacional, muito conhecimento das técnicas envolvidas e muita experiência no projeto de silenciadores. Mesmo trabalhando com modelos mais simplificados que levam em consideração simetrias dos dispositivos envolvidos, as simulações podem levar dias, mesmo usando supercomputadores. Também, altas temperaturas e altas vazões volumétricas do fluido em escoamento representam um obstáculo a mais para a utilização das técnicas citadas acima. Por tudo isto, tais técnicas não têm sido utilizadas como ferramentas de análise para a elaboração dos projetos, mas somente como ferramentas de simulação complementares ao projeto. Desta forma, as formulações matemáticas analíticas, teóricas e empíricas são ainda consideradas o estado da arte para o projeto de sistemas passivos de controle de ruído (Beranek e Vér (1992), Gerges (1992), Snyder (2000), Barron (2003), Costa (2003) e Bistafa (2006)).
2.2 O Controle Ativo de Ruído
A idéia original do controle ativo de ruído não é nova, tendo sido Paul Lueg (Tobias et.
al., 2005) o autor do primeiro artigo publicado em 1936 (Lueg, 1936). Paul Lueg projetou e patenteou a idéia de um sistema de controle ativo de ruído utilizando um microfone e um alto-falante dirigido eletronicamente para gerar o som de cancelamento. A patente ficou conhecida internacionalmente, mas as aplicações práticas do conceito se tornaram viáveis economicamente apenas nos últimos 20 anos, graças ao avanço tecnológico dos microprocessadores, sensores e atuadores (Kuo et. al., (1996) e Snyder (2000)). Atualmente, o controle ativo de ruído representa ainda apenas uma pequena parcela de todas as técnicas aplicáveis ao controle de ruído (Snyder, 2000).
Já desde as primeiras aplicações industriais do controle ativo de ruído foram adotadas técnicas de controle adaptativo (Shynk (1989), Kuo e Morgan (1996) e Snyder (2000)) sem as quais as aplicações práticas seriam inviáveis. De fato, para superar problemas reais tais como, por exemplo, mudanças contínuas de velocidade e carga em motores e sopradores de ar, que resultam em variações de freqüência e amplitude, o sistema de controle ativo tem que ser adaptativo (Kuo e Morgan, 1996). Em outras palavras, a aplicação da teoria de filtragem a sistemas de controle ativo de ruído seria inócua sem critérios de adaptabilidade.
Segundo Kuo e Morgan, (1996), duas maneiras distintas foram desenvolvidas para o controle ativo de ruído, a saber: as técnicas baseadas em realimentação (feedback) e as técnicas em avanço (feedforward).
Técnicas baseadas em realimentação são requeridas para aplicações nas quais não é possível (ou prático) coletar um sinal de referência coerente (Kuo e Morgan, 1996). Tais aplicações incluem ruídos gerados a partir de turbulências ou a partir de múltiplas fontes e muitos caminhos de propagação, onde não há sinal de referência coerente disponível. Por outro lado, a estrutura de controle ativo de ruído em avanço é, geralmente, mais robusta que a estrutura feedback, especialmente quando o sensor de referência está isolado da influência da fonte secundária (Kuo e Morgan, 1996). Enquanto as técnicas baseadas em realimentação, até o presente, se restringiram a muito poucas aplicações práticas (Kuo e Morgan, 1996), as técnicas de controle de ruído em avanço representam hoje uma esmagadora maioria dos casos práticos reais (Kuo e Morgan, (1996) e Snyder, (2000))
Em geral, existem duas estruturas de filtro digital que são mais comumente utilizadas na
filtragem adaptativa em avanço, a saber: o filtro de resposta finita ao impulso (FIR) e o filtro
9
de resposta infinita ao impulso (IIR). Segundo (Snyder, 2000), o filtro FIR não apresenta uma estrutura de realimentação entre a saída e a entrada, o que impossibilita a ocorrência de um reforço do ganho do sinal de entrada de maneira a levá-lo para um modo instável. Porém, num filtro FIR, o ganho, ou a amplificação do sinal de entrada, também pode se tornar extremamente elevado. Por outro lado, no filtro IIR esse fato pode ocorrer como resultado de uma amplificação do sinal da realimentação inerente à sua estrutura.
O filtro FIR não consegue predizer com precisão um sistema físico que apresenta longos períodos de oscilação, pois a estrutura FIR incorpora somente os zeros da função de transferência, os quais identificam a freqüência e a resposta em fase do sinal a ser controlado (Snyder, 2000). Por outro lado, os filtros IIR, através de seus pólos, presentes no denominador da função de transferência, possibilitam um melhor controle de plantas que alteram a sua dinâmica, tendo em vista a constante realimentação da estrutura através das saídas passadas (Snyder, 2000).
Segundo (Snyder, 2000), os filtros IIR não são incondicionalmente estáveis2, pois
alguns pólos do filtro podem mover-se para fora do círculo unitário durante o processo adaptativo, causando instabilidade. Desta maneira, torna-se importante monitorar a estabilidade para cada iteração e, também, selecionar um algoritmo que garanta convergência. Infelizmente, estes algoritmos requerem cálculos intensos. Assim, torna-se difícil realizar o controle em tempo real, especialmente para aplicações de controle ativo de ruído acústico (Snyder, 2000).
Sun e Meng, (2004) afirmam que a maior parte dos algoritmos adaptativos para sistemas
de controle ativo de ruído em dutos possui estrutura de filtros digitais FIR baseadas nos trabalhos de Nelson et. al., (1992), Kuo et. al., (1996) e Elliott, (2001).
Por se mostrarem visivelmente superiores às técnicas baseadas em realimentação, pelo
menos para a maioria das situações reais, as técnicas de controle de ruído em avanço serão discutidas a seguir. Algoritmos adaptativos para controle ativo de ruído em avanço
O primeiro trabalho utilizando filtragem adaptativa aplicado ao controle ativo de ruído sonoro foi realizado por Burgess (1981), baseado na aplicação do algoritmo de mínimos quadrados (LMS3), originalmente utilizado em telecomunicações para cancelamento de ruídos elétricos. O sistema de controle ativo foi configurado de tal forma que o sensor de erro foi posicionado após as fontes primária e secundária e em uma localização adequada para medir a maior amplitude de sinal possível. Burgess mostrou que, se e o sistema de dutos funciona como um guia de ondas planas, o problema do controle ativo de ruído em dutos pode ser resolvido. Isto significa que, se a hipótese de ondas planas for quebrada, ou seja, se houver ondas onde há modos de ordem superior (acima da freqüência de corte para ondas planas), o procedimento proposto por Burgess (1981) não se aplica. O primeiro trabalho que veio contornar esta limitação foi escrito por Elliott et. al. (1987) onde implementou-se o mesmo algoritmo utilizado por Burgess (1981), só que utilizando múltiplos sensores de erro. Elliott e
2 A superfície de desempenho de um filtro adaptativo IIR é geralmente não-quadrática, com isso, a convergência do algoritmo pode ocorrer para um mínimo local e, desta forma, os coeficientes não irão representar um conjunto de ótimos globais, podendo levar a uma instabilidade do sistema. 3 De acordo com Widrow e Stems (1985), os sistemas de controle ativo na configuração em avanço utilizando filtragem adaptativa, em sua grande maioria, são desenvolvidos a partir da metodologia de mínimos quadrados (“Least Mean Square”), cujo detalhamento é apresentado no Capítulo 5.
10
Nelson (1992), posteriormente, propuseram uma versão filtrada do algoritmo de mínimos quadrados, denominada “FXLMS multicanal”, que aceita a aplicação de múltiplos sensores de erro, múltiplas fontes secundárias e múltiplos sinais de referência.
O método de controle ativo utilizado por Elliott e Nelson (1992), por ser um método não normalizado4 e por trabalhar no domínio do tempo, apresenta algumas dificuldades de convergência quando é aplicado ao controle ativo de ruído em banda larga5.
Pode-se considerar que o FXLMS no domínio do tempo é, atualmente, o mais importante entre os métodos de controle ativo utilizando a teoria de filtragem adaptativa (Donadon, 2002). Segundo Donadon, é um algoritmo relativamente simples, se comparado a outros métodos de controle (controle robusto ou ótimo, por exemplo), sendo de fácil implementação e apresentando desempenho satisfatório em aplicações simples, particularmente naquelas onde a fonte de ruído apresenta apenas uma freqüência (controle tonal) ou a freqüência fundamental e suas harmônicas. Ainda segundo (Donadon, 2002), o FXLMS permite ao sistema de controle ativo atingir objetivos diferentes. Por exemplo, se o sensor de erro é um sensor de pressão, o método estará controlando a densidade de energia potencial. Por outro lado, se o sensor de erro é um sensor de velocidade de partícula, o método estará controlando a densidade de energia cinética. Para tornar o processo de filtragem adaptativa mais simples, prático e mais eficiente, Chen et. al., (1998) propuseram resolver a influência negativa da realimentação sonora no desempenho do sistema de controle, proporcionada pela fonte secundária, substituindo o microfone por um mini-acelerômetro. No artigo, os autores consideram a propagação sonora unidimensional tanto de tons puros quanto de tons múltiplos.
Cabell e Fuller (1999) introduziram uma alternativa ao algoritmo FXLMS multicanal, decompondo em valores singulares a matriz de transferência entre as fontes secundárias e os sensores de erro, tornando assim possível controlar de forma independente cada sensor de erro, reduzindo os esforços dos atuadores de controle.
Kamman et. al., (1999), aplicaram o conceito de minimização da velocidade de volume na atenuação do som proveniente da vibração de placas para demonstrar a eficiência da estratégia em avanço. Para suprimir o ruído, os autores utilizaram um acelerômetro para captar a vibração da placa, um alto-falante como a fonte principal de ruído e um segundo alto-falante como fonte de controle. Foram testadas três estratégias de controle ativo: “open-loop feedforward”, “closed-loop proportional” e “closed-loop optimal control”. Todas as três estratégias apresentaram desempenho similar na faixa de freqüência entre 400 e 800 Hz. Entretanto, segundo os autores, dentre os sistemas testados, a estratégia em avanço (feedforward) obteve o melhor desempenho na faixa entre 100 e 275 Hz, reforçando a idéia de que o controle ativo em avanço é eficaz para atenuar ruídos irradiados em baixa freqüência. L’Espérance et. al., (1999), utilizando o algoritmo adaptativo FXLMS para controlar um sistema de múltiplas entradas e múltiplas saídas (MIMO), otimizaram as distâncias entre sensores de erro adjacentes e as distâncias entre sensores de erro e a parede do duto, uma estratégia denominada pelos autores como “conceito de plano de sensor de erro”. Os autores consideram modos de ordem superior em um duto de seção circular. Foram realizados
4 Detalhes sobre a dificuldade de convergência de métodos não normalizados são apresentados no Capítulo 5 e no Apêndice A 5 Admite-se como banda larga uma ampla faixa de freqüências onde há contribuição de vários modos do sistema a ser controlado ativamente.
11
experimentos com diferentes números de microfones de erro. Os resultados mostraram um controle efetivo para uma distância máxima entre cada sensor de erro menor ou igual a 1/3 do comprimento de onda da freqüência considerada. O critério de otimização adotado proporciona um sistema ativo eficaz para controlar os modos de ordem superior em dutos de seção circular sem o conhecimento prévio da forma modal do sistema.
Chen e Liu (2000) demonstraram analiticamente que, para um duto semi-infinito, se a velocidade de volume ótima da fonte secundária é implementada, o módulo da velocidade de volume da fonte secundária é maior ou, no máximo, igual ao módulo da velocidade de volume da fonte primária. Além disso, os autores demonstraram teoricamente que a fonte secundária não consegue controlar freqüências onde a distância de separação entre as fontes primária e secundária são múltiplos ímpares de ¼ do comprimento de onda. Trata-se de um importante resultado teórico para o desenvolvimento de sistemas de controle ativo de ruído. Segundo Oh e Park, (2000), os algoritmos de controle ativo de ruído que usam tecnologias adaptativas para o processamento de sinais passaram a ser largamente investigados para aplicações práticas após Widrow (1985) ter proposto o algoritmo X-filtrado LMS (FXLMS).
Posteriormente ao trabalho de Widrow, visando minimizar problemas de não linearidade associados com as estruturas IIR convencionais, Oh e Park (2000) desenvolveram um novo filtro adaptativo, denominado “IIR-based filter”, baseado no algoritmo U-filtrado LMS (FULMS) apresentado por Eriksson, (1991). O filtro adaptativo IIR-based filter permitiu a realização do controle ativo de sistemas levemente amortecidos com longas respostas ao impulso utilizando um número menor de coeficientes de ponderação6 do que a estrutura IIR convencional.
Segundo Zhang e Jia, (2002), o controle ativo de ruído em avanço tem sido o tópico de muitas pesquisas nos últimos anos, a exemplo dos trabalhos apresentados por Elliott et. al., (1993) e Qiu e Hansen (2000). Para o autor, a atenuação ativa é um meio eficaz de se conseguir grandes reduções de ruído em pequenas áreas fechadas ou em dutos, especialmente para baixas freqüências (abaixo de 500 Hz). Além disso, pela simplicidade, robustez e necessidade relativamente baixa de processamento, o algoritmo de filtragem adaptativa X-filtrado LMS (FXLMS), utilizando uma estrutura de resposta finita ao impulso, tem sido o mais popular. Segundo Zhang e Jia., (2002), se, para uma freqüência em particular, a diferença de fase entre o modelo real e o estimado for maior que 900, o sistema ANC pode tornar-se instável. Assim, é muito importante para o sistema ANC que o modelo do caminho secundário seja estimado rápida e precisamente (Widrow e Stearns., 1985). No Capítulo 5 desta tese, a condição de estabilidade deste método de controle é abordada.
Nos últimos anos, alguns autores têm discutido aspectos práticos para a implantação específica do controle ativo de ruído em sistemas de exaustão envolvendo chaminés de grandes diâmetros (Li et. al., (2002 e 2003) e Qiu et. al., (2002)). Estes autores têm demonstrado experimentalmente o controle ativo de ruídos tonais propagando-se através de modos acústicos de maior ordem, posicionando os sensores de erro e os atuadores otimamente ao longo do duto.
Segundo Friot, (2006), o cancelamento ativo de um ruído aleatório de banda larga requer a detecção do ruído principal com algum avanço no tempo. Em um duto, em particular, 6 Referem-se aos coeficientes do filtro. No caso de uma estrutura IIR são os zeros do numerador e os pólos do denominador da função de transferência.
12
este avanço deve ser maior que os atrasos do caminho secundário, calculado desde a fonte de cancelamento até o microfone de erro. Na prática, segundo (Friot, 2006), o avanço requerido para uma atenuação significativa do ruído pode ser bem maior que os atrasos do caminho secundário. Segundo Elliot, (2001), e Zhang e Jia, (2002), o caminho secundário deve ser identificado à priori com o sistema ANC fora de operação, sem a influência da perturbação principal. Conforme será mostrado nos Capítulos 5 e 7, esta orientação foi aplicada à identificação do caminho secundário do sistema ANC analisado nesta tese. Entretanto, em algumas situações práticas, a perturbação principal sempre estará presente, devido à impossibilidade operacional de desligá-la. Nestas situações é requerida a modelagem “on-line” do caminho secundário, de maneira a assegurar a convergência do algoritmo FXLMS durante o processo de adaptação. Vários métodos de modelagem “on-line” do caminho secundário têm sido desenvolvidos. Estes métodos podem ser classificados em dois tipos (Bao et. al. (1993) e Kuo e Dennis. (1999)). O primeiro envolve a injeção, no sistema ANC, de um ruído branco de média zero. O segundo método, conhecido como o algoritmo da modelagem global, usa um sinal de controle para excitar o caminho secundário e emprega uma técnica de mínimos quadrados estendida para modelar o caminho secundário.
Para Pawejczyk, (2002), um método eficiente de identificação de sistemas e estimação de parâmetros em tempo real deve ser baseado numa estrutura de filtragem digital de resposta finita ao impulso (FIR) associada ao algoritmo LMS, pois os algoritmos de controle ativo de ruído em avanço requerem uma modelagem do caminho secundário. Segundo o autor, este método de identificação se aplica muito bem em plantas cuja dinâmica se mantém ao longo do tempo, como, por exemplo, em dutos acústicos.
Como uma alternativa de estratégia de controle ativo, (Zhou et. al. 2005) compararam o desempenho do controle ativo de ruído em avanço em um duto usando os seguintes métodos de controle: rede de trabalho neural (NN) baseada no algoritmo “filtered-error back-propagation” (FEBPNN); rede de trabalho neural baseada no algoritmo “filtered-X back-propagation” (FXBPNN); o algoritmo dos mínimos quadrados X-filtrado LMS (FXLMS). As simulações computacionais mostraram que o algoritmo FEBPNN oferece vantagens computacionais em relação ao algoritmo FXBPNN. As simulações computacionais e as verificações experimentais mostraram que, para a solução de um problema de controle linear, o desempenho dos algoritmos FEBPNN e FXLMS é similar. Entretanto, para a solução de um problema com não-linearidades, o desempenho do algoritmo FEBPNN é superior. Segundo os autores, há necessidade de um grande esforço para melhorar a consistência do desempenho dos controladores baseados em redes neurais, de forma geral.
Uma aplicação diferente de dutos industriais, mas que merece ser citada é o trabalho de Diego et. al., (2004). Segundo os autores, o algoritmo FXLMS e sua versão multicanal, o algoritmo MELMS, são as estratégias de filtragem adaptativa mais extensamente aplicadas aos sistemas ANC. Em seu trabalho de pesquisa Diego discute o desenvolvimento de um sistema ativo multicanal para atenuar o espectro sonoro local, considerando um ruído multitonal. O objetivo do trabalho foi projetar um sistema prático, real, que executasse bem o controle ativo de ruído local e, assim, melhorasse a sensação de conforto em espaços fechados. O algoritmo adaptativo implementado no controlador é uma extensão multicanal do equalizador adaptativo de ruído multitonal desenvolvido por Kuo e Morgan, (1996).
13
2.3 Controle de Ruído dentro do Contexto de Técnicas Híbridas
Para Li et. al., (2006), os meios tradicionais de controle de ruído se propagando em
dutos envolve a implementação de silenciadores passivos resistivos, que são dispendiosos e, freqüentemente, não tão efetivos para tratar ruídos tonais de baixa freqüência, especialmente quando aplicados em chaminés de exaustão de grandes dimensões. Desta maneira, o controle ativo parece ser uma alternativa promissora. Porém, quando a solução do problema envolve dutos de grandes diâmetros ocorrem propagações sonoras relacionadas a modos acústicos de maior ordem. Isto torna a aplicação do controle ativo de ruído, nestes casos, um grande desafio de engenharia. Segundo Yuan, (2007), o tamanho e o peso dos dispositivos utilizados no controle passivo de ruído em dutos são inversamente proporcionais às faixas de freqüências. Assim, o controle ativo de ruído apresenta-se como uma alternativa atraente para a supressão de ruídos em baixa freqüência sem a utilização de dispositivos pesados e volumosos.
Nota-se que técnicas de controle de ruído híbridas merecem ser analisadas, embora poucos sejam os estudos realizados até o momento com este enfoque. Um exemplo raro de estudos desta natureza foi publicado por Cuesta e Cobo (2000), que projetaram e implementaram um sistema híbrido passivo/ativo para controlar o ruído irradiado por um pequeno gerador. O controle passivo do ruído foi realizado através do enclausuramento do gerador, através de uma pequena cabine acústica, com uma perda por transmissão maior que 20dB para bandas acima de 500Hz. Para controlar o ruído em baixa freqüência, propagando-se através das aberturas de admissão e exaustão de ar para o arrefecimento do motor, foi proposto um sistema de controle ativo em avanço com uma entrada e uma saída (SISO). O sinal de referência para o sistema ativo foi adquirido através de um acelerômetro localizado sobre a caixa do filtro de ar do gerador. O sinal de erro foi fornecido através de um microfone de eletreto localizado no duto de exaustão. Para a fonte de cancelamento foi utilizado um alto-falante para alta temperatura, posicionado em uma derivação lateral para evitar o contato direto com o fluxo de gás de exaustão. Como resultado do controle ativo de ruído, o segundo harmônico do espectro sonoro do ruído da exaustão foi atenuado em 33dB.
Outro exemplo raro de estudo envolvendo técnica de controle de ruído híbrida foi publicado por Chen e Too (2009), que projetaram e implementaram um sistema híbrido passivo/ativo para controlar o ruído em um duto circular, considerando propagação de ondas planas. O controle passivo foi realizado através de um silenciador reativo dimensionado segundo Munjal (1987). No caso da técnica ativa foi utilizada a estratégia de filtragem adaptativa, um filtro FIR associado ao algoritmo LMS, em avanço. Para atenuar uma freqüência de 300Hz, o sistema híbrido mostrou-se mais eficiente do que cada técnica utilizada isoladamente, somente na configuração onde o sistema ativo é localizado à jusante do silenciador reativo. Pode ser observado neste trabalho que o dimensionamento do sistema híbrido não levou em consideração uma metodologia de projeto que combinasse a técnica passiva com a ativa numa proporção ótima.
Confiando no sucesso de técnicas de controle de ruído híbridas, a presente tese,
conforme já comentado na introdução do trabalho, baseou-se na elaboração de uma metodologia de projeto de sistemas de controle de ruído que, na proporção ótima, se possível, combina técnicas passivas com uma técnica ativa. No caso da técnica ativa, optou-se pela utilização do algoritmo dos mínimos quadrados filtrado (FXLMS), especialmente, em função de sua simplicidade, robustez e facilidade de implementação.
14
3 ACÚSTICA DE DUTOS Neste capítulo apresentam-se as características acústicas relevantes, os principais modelos matemáticos empíricos e os principais parâmetros de desempenho utilizados para a predição do ruído em dutos de exaustão, particularmente, de ventiladores industriais e de motores de combustão interna estacionários.
3.1 Características mais Relevantes
3.1.1 Campos Sonoros em Dutos
Os dutos podem ser vistos como clausuras onde uma das dimensões é muito maior em
relação às demais, freqüentemente, terminando em um campo livre, ou seja, no espaço aberto. A característica acústica essencial de um duto é a de restringir as ondas sonoras em duas dimensões com certa liberdade de se propagarem na terceira dimensão. Por esta razão, os dutos, normalmente, são conhecidos como guias de onda (Snyder, 2000). Sendo assim, é intuitivo que, ao se desenvolver o modelo de campo sonoro de um duto, devem-se considerar como condições de contorno as paredes internas e o lado aberto, separadamente. Em relação à extremidade aberta, a resposta sonora pode ser considerada similar à da radiação sonora em campo livre, ou seja, na ausência de quaisquer contornos. Conforme Snyder (2000), este modelo intuitivo do campo sonoro em um duto é, em essência, correto. Porém, alguns detalhes devem ser acrescentados para se obter uma descrição completa do mesmo. Dentre eles, os mais relevantes são os modos acústicos e a impedância em dutos.
3.1.2 Modo Acústico de Onda Plana
O conceito de onda plana, também denominado de modo fundamental, é central na acústica. Ondas planas são ondas nas quais qualquer variável acústica é constante, num dado tempo, sobre qualquer superfície perpendicular à direção de propagação sonora (Jacobsen et. al., 2007). Desta forma, uma onda plana apresenta uma distribuição uniforme de pressão sonora na seção transversal do duto e não tem uma resposta de ressonância associada à seção transversal (Snyder, 2000). A Figura 3.1 apresenta um exemplo de propagação sonora de uma onda plana em um duto. Note que a distribuição de pressão é uniforme em todas as seções transversais do duto. Por outro lado, na direção de propagação longitudinal alternam-se regiões de compressão e de expansão sonora.
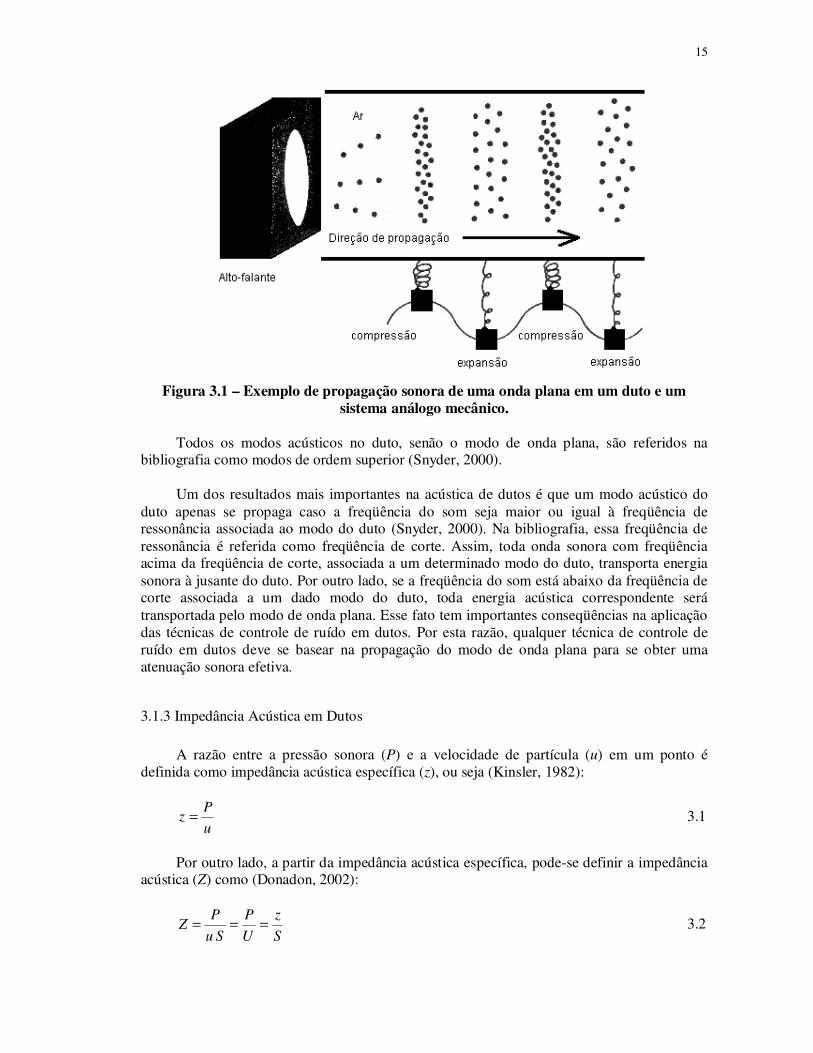
15
Figura 3.1 – Exemplo de propagação sonora de uma onda plana em um duto e um
sistema análogo mecânico. Todos os modos acústicos no duto, senão o modo de onda plana, são referidos na bibliografia como modos de ordem superior (Snyder, 2000).
Um dos resultados mais importantes na acústica de dutos é que um modo acústico do duto apenas se propaga caso a freqüência do som seja maior ou igual à freqüência de ressonância associada ao modo do duto (Snyder, 2000). Na bibliografia, essa freqüência de ressonância é referida como freqüência de corte. Assim, toda onda sonora com freqüência acima da freqüência de corte, associada a um determinado modo do duto, transporta energia sonora à jusante do duto. Por outro lado, se a freqüência do som está abaixo da freqüência de corte associada a um dado modo do duto, toda energia acústica correspondente será transportada pelo modo de onda plana. Esse fato tem importantes conseqüências na aplicação das técnicas de controle de ruído em dutos. Por esta razão, qualquer técnica de controle de ruído em dutos deve se basear na propagação do modo de onda plana para se obter uma atenuação sonora efetiva.
3.1.3 Impedância Acústica em Dutos
A razão entre a pressão sonora (P) e a velocidade de partícula (u) em um ponto é
definida como impedância acústica específica (z), ou seja (Kinsler, 1982):
u
Pz = 3.1
Por outro lado, a partir da impedância acústica específica, pode-se definir a impedância acústica (Z) como (Donadon, 2002):
S
z
U
P
Su
PZ === 3.2
16
onde S representa a área da seção transversal do duto e U é definida como “velocidade de volume”.
O conceito de impedância especifica é utilizado para descrever a transmissão de ondas acústicas de um meio para outro, enquanto o conceito de impedância é utilizado para descrever a irradiação acústica a partir da vibração de corpos e para descrever a transmissão sonora através de dutos (Kinsler (1982) e Donadon (2005)). No caso de variação súbita de impedância ocorrerá reflexão da onda sonora (forma-se uma onda sonora de volta à fonte). Quando uma onda sonora alcança a extremidade à jusante de um duto, ocorre uma mudança de impedância em relação ao campo aberto. Esta mudança causa reflexão da onda sonora que se propaga no duto. Este fato tem implicações importantes no escoamento do fluxo de energia acústica e no desempenho das técnicas de controle de ruído (Snyder, 2000).
A impedância é uma quantidade complexa. A parte real é definida como resistência acústica e está associada ao fluxo de energia acústica. A parte imaginária é a reatância e não está associada ao fluxo de energia sonora. O principal objetivo no projeto de silenciadores é reduzir o fluxo de energia acústica, ou seja, a parte real da impedância.
Por sua vez, para um duto de exaustão de um fluido na atmosfera, a resistência acústica depende dos seguintes parâmetros: área da seção transversal (S); perímetro (Perim); comprimento do duto (L); freqüência sonora (f); a velocidade do fluido à jusante da fonte sonora (V) e características do meio e do fluido (massa molecular (M), massa específica (m) e outros).
Nos Capítulos 4 e 5, de fundamentos teóricos e práticos para o controle passivo e ativo de ruído, estes temas serão abordados mais profundamente.
3.1.4 Freqüência de Corte de Dutos
A freqüência de corte de um duto (fc), ou seja, a primeira freqüência de ressonância
associada ao primeiro modo acústico (m = 1), pode ser calculada da seguinte maneira (Barron, 2003):
i. Para duto reto de seção transversal retangular (a x b):
a
cf c 2
= onde a > b e c denota a velocidade do som 3.3
ii. Para duto reto de seção transversal circular:
dutoc r
c,f
2
58610= onde rduto denota o raio do duto 3.4
Um aspecto importante a ser observado é que as fórmulas 3.3 e 3.4 só valem se as
dimensões transversais do duto principal (a, b ou rduto) forem menores do que a metade do
comprimento da onda sonora ( 2λ ). Esta é uma condição necessária para garantir que
somente ondas planas se propaguem ao longo do duto (Barron, 2003).
17
3.2 Predição do Ruído em Dutos de Exaustão em Ventiladores Industriais
Os ventiladores industriais são fontes de ruído bastante comuns e estão bem documentados acusticamente (Bistafa, 2006). Normalmente, são as principais fontes sonoras em sistemas de exaustão na indústria. As duas fontes sonoras potencialmente críticas de um ventilador são os dutos de admissão e de exaustão deste sistema. O nível de potência sonora irradiado por estas fontes (NWS) pode ser estimado com razoável precisão, a partir das características do ventilador, através da seguinte fórmula empírica (Bistafa, 2006):
483
E)plog(20)Qlog(10CFNWS v
ii −+++= ∆ [dB] m,,i K1= 3.5
onde, CF7 denota a potência sonora específica (dB) em bandas de uma oitava, Q a vazão volumétrica de fluido (m3/s), p∆ o incremento de pressão fornecido pelo ventilador (Pa) e Ev a eficiência do ventilador, em porcentagem.
3.3 Predição do Ruído em Dutos de Exaustão de Motores Estacionários (Diesel ou Gás)
As principais irradiações de ruído proveniente dos motores de combustão interna ocorrem na saída do duto de exaustão dos gases de combustão, na entrada do duto de admissão de ar e no bloco do motor. Visando o projeto tradicional de silenciadores para motores estacionários deve-se avaliar o ruído proveniente da exaustão dos gases de combustão do motor estacionário, independentemente das demais irradiações sonoras. O nível de potência sonora não atenuada irradiada através do duto de exaustão de um motor estacionário pode ser avaliado pela seguinte equação empírica (Bistafa, 2006):
1202,1
L)Plog(10NWS tubulação
+
−−= Β [dB] 3.6
onde, P denota a potência do motor em (kW), Β uma correção do nível de potência sonora total, sendo B = 0 para motores sem turbo compressor e B = 6 para motores com turbo compressor, e Ltubulação o comprimento da tubulação de exaustão em (m). Os valores do nível de potência sonora obtidos devem ser corrigidos para cada banda de oitava conforme Bistafa, (2006), [Tabela 8.17, página 179 do Capítulo 8].
3.4 Validação dos Modelos Teóricos para Predição de Ruído em Dutos de Exaustão
Para calcular os níveis de pressão sonora espectrais8 (NPSi), a partir dos níveis de potência sonora calculados previamente, pode-se utilizar a equação básica de propagação sonora ao ar livre (Bistafa, 2006):
7 As potências sonoras específicas (CF) referentes às freqüências em bandas de uma oitava são fornecidas por Bistafa, (2006), experimentalmente. 8 Níveis de pressão sonora correspondente às bandas de largura variável, ou seja, correspondentes às bandas de oitava.
18
( ) 114
log10DIrlog20NWS),r(NPS ii −
−+−=
π
Ωθ θ [dB] 81 ,,i K=
3.7 onde Ω denota o ângulo sólido disponibilizado para a fonte de livre propagação e θDI a
diretividade da fonte sonora (Bistafa, 2006).
Na medida em que o som se propaga a partir da fonte de ruído ao ar livre, ocorre uma atenuação sonora que depende da freqüência (Tabela 3.1). Assim, a redução do nível de pressão sonora global9 (NPSglobal), A – ponderado10, depende da composição do espectro sonoro. Valores do fator A – ponderado estão disponíveis na literatura como função das bandas de freqüência normalizadas (por exemplo, Bistafa (2006), página 79 do Capítulo 6, ou Gerges (1992), página 54 do Capítulo 2).
Por sua vez, através de uma soma logarítmica envolvendo os níveis sonoros espectrais,
A – ponderados, pode-se calcular o nível de pressão sonora global A – ponderado, através da equação:
= ∑
=
+8
1i
10
ANPS
global
ii
10log10NPS [dBA] 3.8
onde Ai denota a ponderação para cada freqüência de oitava, pela curva de ponderação A, (Gerges, 1992).
Os resultados fornecidos pelo modelo empírico descrito através das Eqs. 3.5 a 3.8 são
considerados confiáveis. Entretanto, para a realização de um projeto de um atenuador de ruído com segurança, é necessário que os resultados fornecidos pela Eq. 3.8 sejam validados, Bistafa (2006).
Para validar o espectro do ruído associado à fonte em análise (Eq, 3.7) e,
conseqüentemente, NPSglobal (Eq. 3.8), deve-se compará-lo com o espectro de fonte típica, conforme mostra a Tabela 3.1. Sendo o espectro do ruído analisado similar ao espectro de fonte típica, dentro das tolerâncias indicadas na Tabela 3.1, pode-se considerar válidos os resultados fornecidos pelas Eqs. 3.5 e 3.6, Bistafa (2006). Caso contrário, serão necessárias medições no entorno da fonte em análise a fim de se avaliar o nível de potência sonora experimentalmente.
Tabela 3.1 – Espectro de fonte típica. Freqüência central da banda de oitava
(Hz) 63 125 250 500 1k 2k 4k 8k
NPSi (dB) – NPSglobal (dBA)
-2 ± 5 1 ± 5 -1 ± 5 -3 ± 5 -5 ± 5 -8 ± 5 -12 ± 5 -23 ± 5
9 Nível de pressão sonora total do ruído associado ao espectro de banda larga apresentados pela Eq. 3.7. 10 Procedimento de ponderação de freqüências, no qual a energia sonora espectral de um sinal é progressivamente atenuada dentro da faixa de freqüências audíveis. É uma curva de resposta subjetiva. A curva A - ponderada é a que mais se aproxima da resposta do canal auditivo humano.
19
3.5 Parâmetros de Desempenho após o Tratamento Acústico de Dutos
A redução de ruído proveniente de um silenciador (resistivo, reativo ou híbrido) é geralmente avaliada através de parâmetros de desempenho acústico, dentre os quais, os mais freqüentemente utilizados são: a) perda por inserção (PI), que é a diferença do nível de pressão sonora nas vizinhanças devido à inserção do silenciador no sistema; b) redução de ruído (RR), que é a diferença no nível de pressão sonora entre o ponto imediatamente antes e imediatamente depois do sistema de controle; c) a perda por transmissão (PT), que é a mudança no nível de potência sonora imposta pelo silenciador.
Normalmente, a perda por inserção e a redução de ruído dependem das características da extremidade do duto e do silenciador. Já a perda por transmissão depende apenas das características do silenciador (Gerges, 1992).
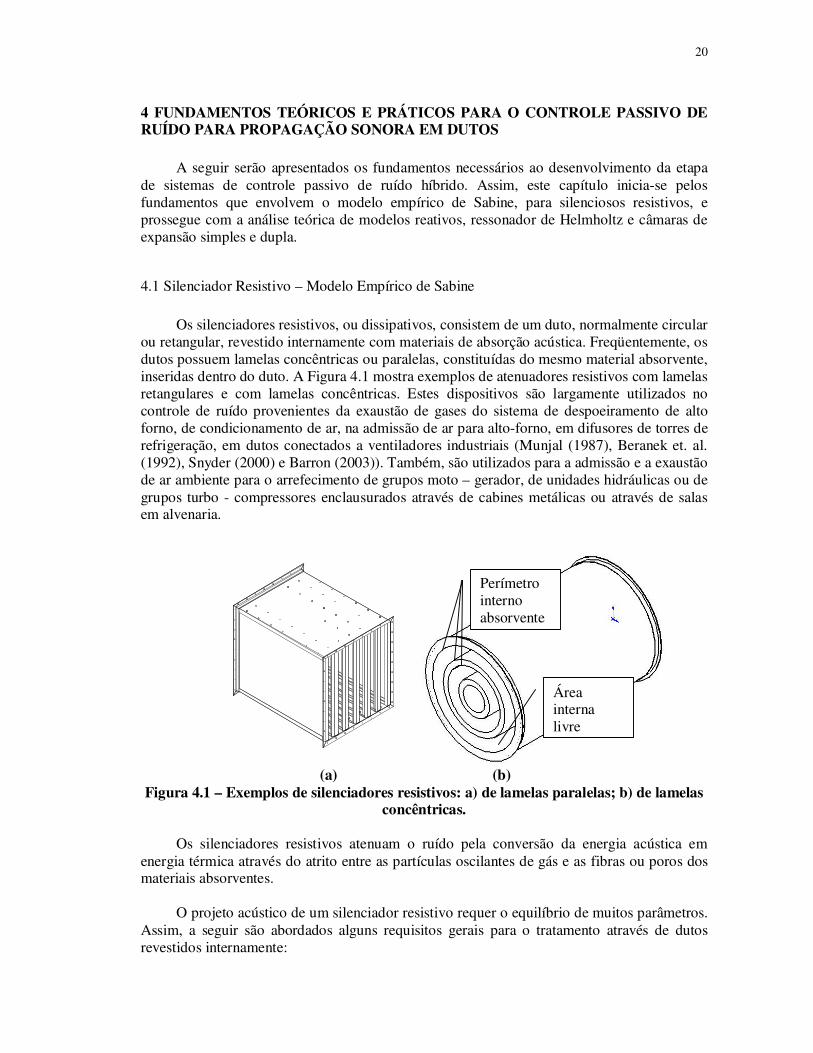
20
4 FUNDAMENTOS TEÓRICOS E PRÁTICOS PARA O CONTROLE PASSIVO DE RUÍDO PARA PROPAGAÇÃO SONORA EM DUTOS A seguir serão apresentados os fundamentos necessários ao desenvolvimento da etapa de sistemas de controle passivo de ruído híbrido. Assim, este capítulo inicia-se pelos fundamentos que envolvem o modelo empírico de Sabine, para silenciosos resistivos, e prossegue com a análise teórica de modelos reativos, ressonador de Helmholtz e câmaras de expansão simples e dupla.
4.1 Silenciador Resistivo – Modelo Empírico de Sabine
Os silenciadores resistivos, ou dissipativos, consistem de um duto, normalmente circular
ou retangular, revestido internamente com materiais de absorção acústica. Freqüentemente, os dutos possuem lamelas concêntricas ou paralelas, constituídas do mesmo material absorvente, inseridas dentro do duto. A Figura 4.1 mostra exemplos de atenuadores resistivos com lamelas retangulares e com lamelas concêntricas. Estes dispositivos são largamente utilizados no controle de ruído provenientes da exaustão de gases do sistema de despoeiramento de alto forno, de condicionamento de ar, na admissão de ar para alto-forno, em difusores de torres de refrigeração, em dutos conectados a ventiladores industriais (Munjal (1987), Beranek et. al. (1992), Snyder (2000) e Barron (2003)). Também, são utilizados para a admissão e a exaustão de ar ambiente para o arrefecimento de grupos moto – gerador, de unidades hidráulicas ou de grupos turbo - compressores enclausurados através de cabines metálicas ou através de salas em alvenaria.
(a) (b)
Figura 4.1 – Exemplos de silenciadores resistivos: a) de lamelas paralelas; b) de lamelas concêntricas.
Os silenciadores resistivos atenuam o ruído pela conversão da energia acústica em
energia térmica através do atrito entre as partículas oscilantes de gás e as fibras ou poros dos materiais absorventes. O projeto acústico de um silenciador resistivo requer o equilíbrio de muitos parâmetros. Assim, a seguir são abordados alguns requisitos gerais para o tratamento através de dutos revestidos internamente:
Perímetro interno absorvente
Área interna livre

21
1. Os três parâmetros mais importantes para se determinar o nível de atenuação sonora são: i) a resistividade acústica do material absorvente; ii) a espessura do material absorvente em relação à porção aberta da seção do duto; iii) a área de absorção sonora instalada na parede do duto.
2. A razão entre o raio da seção aberta do duto e o comprimento de onda sonoro é o fator fundamental para se definir o desempenho da atenuação nas altas, medias e baixas freqüências.
3. Geralmente, a espessura recomendada do material absorvente é 1/5 do raio da seção aberta do duto.
4. Apresentam um desempenho melhor para os modos acústicos de ordem superior, os chamados modos de inclusão (“cut-on”).
A resistividade do material depende da resistência ao fluxo, que é um parâmetro que
caracteriza a diferença de pressão observada em ambos os lados de um material acústico (Gerges, 1992).
Geralmente, para se atingir um nível satisfatório de atenuação sonora o comprimento do
duto tratado deve ser dez vezes maior que o diâmetro da seção aberta do duto (Snyder, 2000). Porém, a presença das lamelas divisoras tem por objetivo aumentar a área de absorção sonora e tornar o dispositivo mais compacto, (Gerges, 1992).
4.1.1 Perda por Transmissão
Para o cálculo da eficiência de um silenciador resistivo utilizam-se modelos empíricos
ou teóricos. No presente trabalho, para estimar a perda por transmissão (PT) através do silenciador resistivo, será adotada a fórmula empírica de Sabine (Gerges (1992), Costa (2003) e (Bistafa, 2006)):
A
PL05,1PT
int
intrsilenciado
4,1
×××= α [dB], 4.1
onde, α denota o coeficiente de absorção sonora (adimensional) normalizado em bandas de oitava, Lsilenciador o comprimento do silenciador, Pint o perímetro interno absorvente e Aint a área interna livre.
A Equação 4.1 leva em consideração os efeitos de ondas refletidas e de ondas
transversais propagando-se no duto principal, na entrada e na saída do silenciador.
Para que a Eq. 4.1 seja utilizada em dutos com geometria retangular e forneça um erro igual ou inferior a 10%, devem ser respeitadas as seguintes restrições (Gerges, 1992):
1. Os lados da área aberta retangular devem ter valores entre 150 mm e 450 mm; 2. A razão entre os lados deve ficar entre 0,5 e 2; 3. A velocidade do fluxo de ar deve ser menor ou igual a 20 m/s; 4. O coeficiente de absorção (α ) tem que ser menor ou igual a 0,8.
As limitações geométricas dos itens (1) e (2) existem em decorrência dos limites de
proporção experimentados durante a determinação da fórmula empírica, baseados em medidas correntes e em função das freqüências inferiores e superiores da banda a ser tratada.
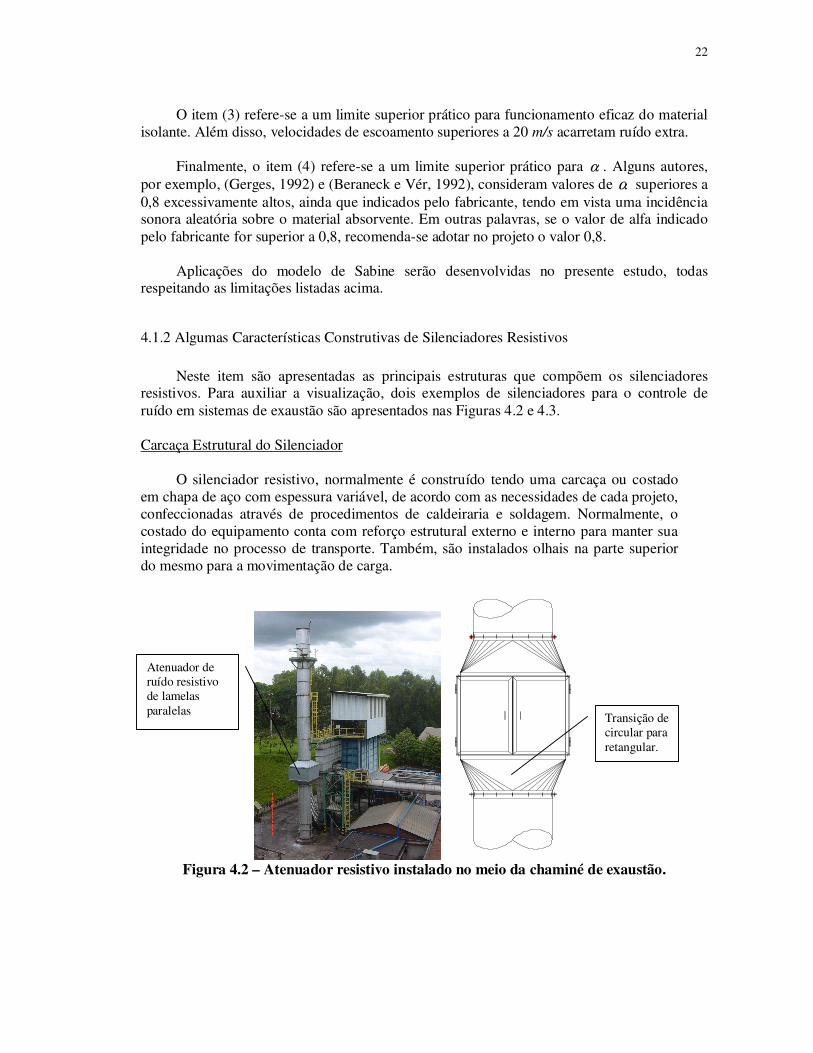
22
O item (3) refere-se a um limite superior prático para funcionamento eficaz do material isolante. Além disso, velocidades de escoamento superiores a 20 m/s acarretam ruído extra. Finalmente, o item (4) refere-se a um limite superior prático para α . Alguns autores, por exemplo, (Gerges, 1992) e (Beraneck e Vér, 1992), consideram valores de α superiores a 0,8 excessivamente altos, ainda que indicados pelo fabricante, tendo em vista uma incidência sonora aleatória sobre o material absorvente. Em outras palavras, se o valor de alfa indicado pelo fabricante for superior a 0,8, recomenda-se adotar no projeto o valor 0,8.
Aplicações do modelo de Sabine serão desenvolvidas no presente estudo, todas respeitando as limitações listadas acima.
4.1.2 Algumas Características Construtivas de Silenciadores Resistivos
Neste item são apresentadas as principais estruturas que compõem os silenciadores resistivos. Para auxiliar a visualização, dois exemplos de silenciadores para o controle de ruído em sistemas de exaustão são apresentados nas Figuras 4.2 e 4.3. Carcaça Estrutural do Silenciador O silenciador resistivo, normalmente é construído tendo uma carcaça ou costado em chapa de aço com espessura variável, de acordo com as necessidades de cada projeto, confeccionadas através de procedimentos de caldeiraria e soldagem. Normalmente, o costado do equipamento conta com reforço estrutural externo e interno para manter sua integridade no processo de transporte. Também, são instalados olhais na parte superior do mesmo para a movimentação de carga.
Figura 4.2 – Atenuador resistivo instalado no meio da chaminé de exaustão.
Atenuador de ruído resistivo de lamelas paralelas
Transição de circular para retangular.

23
Figura 4.3 – Atenuador resistivo de lamelas paralelas instalado na saída da chaminé de
exaustão Estrutura das Lamelas As estruturas das lamelas ou septos normalmente são confeccionadas utilizando chapas de aço, geralmente aço galvanizado (de acordo com a NBR 7008 e a NBR 7013, grau ZC, revestimento do tipo B, massa mínima de zinco de 260g/m2 e acabamento superficial tipo cristal normal). As lamelas são fixadas na carcaça estrutural do atenuador através da aplicação de parafusos auto – atarrachantes ou rebites. Material de absorção sonora Os materiais absorventes mais utilizados nas lamelas são os painéis de lã de vidro ou de lã de rocha com densidade e espessura variáveis, ancorados na parede interna do duto. Normalmente, o material absorvente é protegido por tecidos porosos e / ou chapas metálicas perfuradas, (Snyder, 2000). No caso de se utilizar chapas metálicas perfuradas recomenda-se que a área aberta seja superior a 25% da área total da chapa, de forma a não comprometer a eficiência do material absorvente, (Snyder, 2000).
4.1.3 Características Gerais do Sistema Resistivo
• Atenuam o ruído proveniente do escoamento de um fluído utilizando-se materiais
fibrosos de baixa densidade, dispostos através de lamelas; • Estes materiais são absorvedores acústicos; • Tais materiais são muito efetivos para operação em médias e altas freqüências,
geralmente acima de 500Hz; • Para se obter uma apreciável redução de ruído, as dimensões dos dispositivos devem
ser da ordem do comprimento de onda da freqüência a ser atenuada; • Para freqüências inferiores a 500Hz, utilizam-se dispositivos de tamanho e peso
excessivos; • Para a faixa de altas freqüências o controle passivo é uma solução consagrada pela
sua eficiência e baixo custo;
Atenuador de ruído resistivo de lamelas paralelas
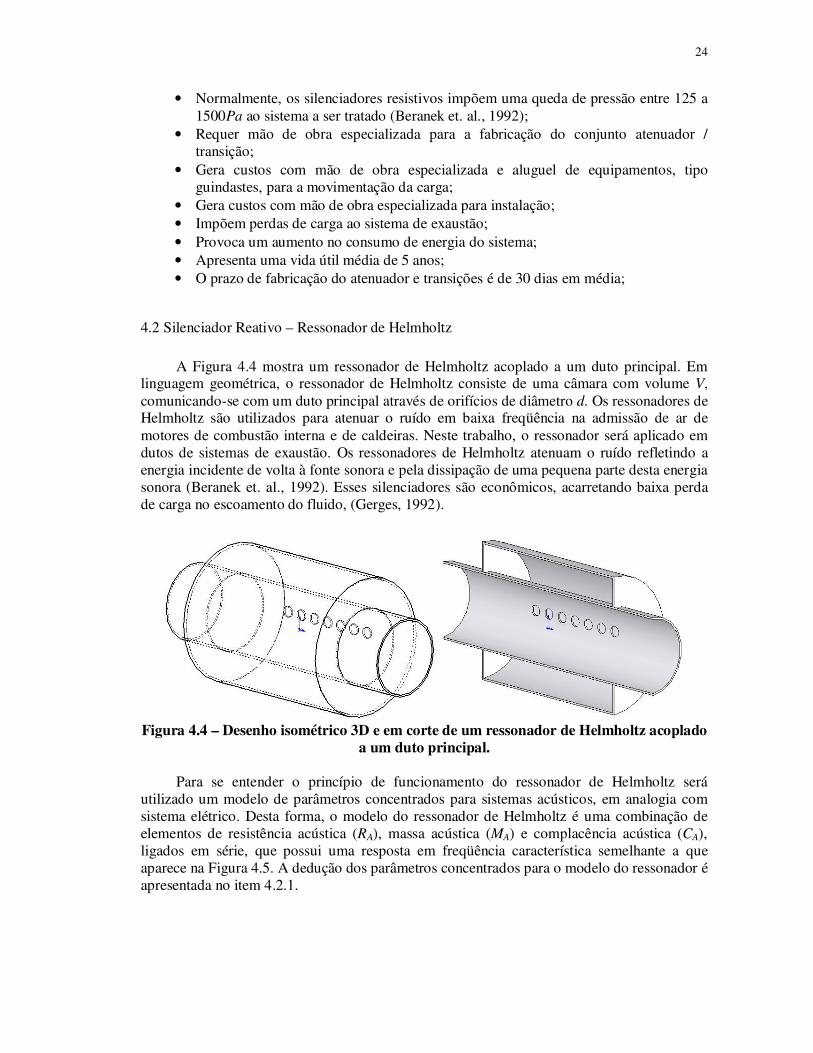
24
• Normalmente, os silenciadores resistivos impõem uma queda de pressão entre 125 a 1500Pa ao sistema a ser tratado (Beranek et. al., 1992);
• Requer mão de obra especializada para a fabricação do conjunto atenuador / transição;
• Gera custos com mão de obra especializada e aluguel de equipamentos, tipo guindastes, para a movimentação da carga;
• Gera custos com mão de obra especializada para instalação; • Impõem perdas de carga ao sistema de exaustão; • Provoca um aumento no consumo de energia do sistema; • Apresenta uma vida útil média de 5 anos; • O prazo de fabricação do atenuador e transições é de 30 dias em média;
4.2 Silenciador Reativo – Ressonador de Helmholtz
A Figura 4.4 mostra um ressonador de Helmholtz acoplado a um duto principal. Em linguagem geométrica, o ressonador de Helmholtz consiste de uma câmara com volume V, comunicando-se com um duto principal através de orifícios de diâmetro d. Os ressonadores de Helmholtz são utilizados para atenuar o ruído em baixa freqüência na admissão de ar de motores de combustão interna e de caldeiras. Neste trabalho, o ressonador será aplicado em dutos de sistemas de exaustão. Os ressonadores de Helmholtz atenuam o ruído refletindo a energia incidente de volta à fonte sonora e pela dissipação de uma pequena parte desta energia sonora (Beranek et. al., 1992). Esses silenciadores são econômicos, acarretando baixa perda de carga no escoamento do fluido, (Gerges, 1992).
Figura 4.4 – Desenho isométrico 3D e em corte de um ressonador de Helmholtz acoplado
a um duto principal.
Para se entender o princípio de funcionamento do ressonador de Helmholtz será utilizado um modelo de parâmetros concentrados para sistemas acústicos, em analogia com sistema elétrico. Desta forma, o modelo do ressonador de Helmholtz é uma combinação de elementos de resistência acústica (RA), massa acústica (MA) e complacência acústica (CA), ligados em série, que possui uma resposta em freqüência característica semelhante a que aparece na Figura 4.5. A dedução dos parâmetros concentrados para o modelo do ressonador é apresentada no item 4.2.1.
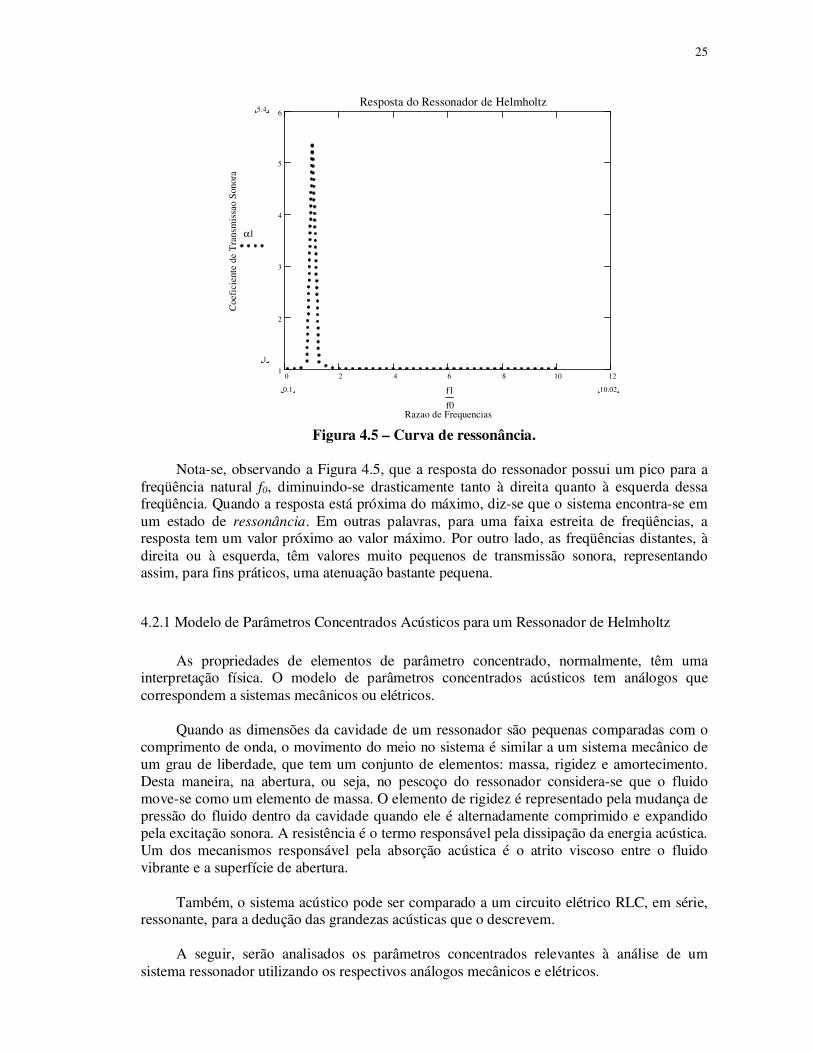
25
0 2 4 6 8 10 121
2
3
4
5
6Resposta do Ressonador de Helmholtz
Razao de Frequencias
Coe
fici
ente
de
Tra
nsm
issa
o S
onor
a
5.4
1
α1
10.020.1 f1
f0
Figura 4.5 – Curva de ressonância.
Nota-se, observando a Figura 4.5, que a resposta do ressonador possui um pico para a
freqüência natural f0, diminuindo-se drasticamente tanto à direita quanto à esquerda dessa freqüência. Quando a resposta está próxima do máximo, diz-se que o sistema encontra-se em um estado de ressonância. Em outras palavras, para uma faixa estreita de freqüências, a resposta tem um valor próximo ao valor máximo. Por outro lado, as freqüências distantes, à direita ou à esquerda, têm valores muito pequenos de transmissão sonora, representando assim, para fins práticos, uma atenuação bastante pequena.
4.2.1 Modelo de Parâmetros Concentrados Acústicos para um Ressonador de Helmholtz
As propriedades de elementos de parâmetro concentrado, normalmente, têm uma interpretação física. O modelo de parâmetros concentrados acústicos tem análogos que correspondem a sistemas mecânicos ou elétricos. Quando as dimensões da cavidade de um ressonador são pequenas comparadas com o comprimento de onda, o movimento do meio no sistema é similar a um sistema mecânico de um grau de liberdade, que tem um conjunto de elementos: massa, rigidez e amortecimento. Desta maneira, na abertura, ou seja, no pescoço do ressonador considera-se que o fluido move-se como um elemento de massa. O elemento de rigidez é representado pela mudança de pressão do fluido dentro da cavidade quando ele é alternadamente comprimido e expandido pela excitação sonora. A resistência é o termo responsável pela dissipação da energia acústica. Um dos mecanismos responsável pela absorção acústica é o atrito viscoso entre o fluido vibrante e a superfície de abertura. Também, o sistema acústico pode ser comparado a um circuito elétrico RLC, em série, ressonante, para a dedução das grandezas acústicas que o descrevem.
A seguir, serão analisados os parâmetros concentrados relevantes à análise de um sistema ressonador utilizando os respectivos análogos mecânicos e elétricos.

26
4.2.1.1 Massa acústica
Para um sistema mecânico, a segunda lei de Newton pode ser apresentada em termos da variação da velocidade em relação ao tempo. Assim, a forca mecânica atuando no sistema é:
dt
dvmFsistema = 4.2
A quantidade m é a massa sendo acelerada e v é a velocidade desta massa em um determinado tempo. Esta expressão é análoga à da variação de tensão através de um elemento indutor em um circuito elétrico:
dt
diLe E=∆ 4.3
A quantidade LE é a indutância (Henry) e i é a corrente elétrica (ampéres). A tensão elétrica é análoga à força mecânica e a corrente elétrica é análoga à velocidade da massa. As relações dadas pelas Eqs. 4.2 e 4.3 sugerem um sistema análogo acústico, no qual uma porção do sistema é acelerada. Assim, em sistemas acústicos é mais conveniente usar a pressão sonora ao invés de força e a velocidade de volume acústico (U = Su) ao invés da velocidade da partícula. Desta forma, a 2a lei de Newton, para uma massa acelerada, pode ser escrita da seguinte maneira, tendo em vista a análise acústica:
dtS
dUm
dt
dumpSF === ∆ . 4.4
Manipulando a Eq. 4.4, tem-se:
dt
dUM
dt
dU
S
mp A2
==∆ , 4.5
onde, MA denota a massa acústica (kg/m4). A pressão acústica é análoga à tensão elétrica ou à forca mecânica. O fluxo volumétrico é análogo à corrente elétrica ou à velocidade da massa. A expressão para a massa de gás no interior de um tubo de diâmetro a e comprimento L é dada como: ( )Lam 2
0 πρ= , 4.6
onde, 0ρ denota a massa específica do gás em escoamento.
Assim, substituindo a Eq. 4.6, na massa acústica, Eq.4.7, tem-se, (Barron, 2003):
( )
( ) 20
22
20
2Aa
L
a
La
S
mM
π
ρ
π
πρ=== 4.7

27
Porém, existe uma massa de gás adicional em cada extremidade do tubo, que é acelerada pelo processo de contração e expansão do meio acústico. Esta massa extra deve ser adicionada à massa de gás dentro do tubo para se determinar a correta massa acústica. Sendo assim, existem dois casos que devem ser considerados para a extremidade do tubo:
i. Extremidade flangeada, (Pierce, 1981):
( ) Laa3/8m 200
3 ∆πρρ∆ == . 4.8
Manipulando a Eq. 4.8, encontra-se o comprimento equivalente, que corresponde à massa de gás na extremidade, também acelerada, que se soma à massa acústica:
π∆
3
a8L = . 4.9
ii. Extremidade livre, (Pierce, 1981):
Laa613,0m 2
003 ∆πρρπ∆ == 4.10
Manipulando a Eq. 4.10, encontra-se o comprimento equivalente, que corresponde à massa de gás na extremidade, também acelerada, que se soma à massa acústica: a613,0L =∆ . 4.11 A massa acústica total para um tubo é:
2
ap0A
a
LM
π
ρ= . 4.12
O comprimento aparente para um tubo é: baap LLLL ∆∆ ++= . 4.13
As quantidades aL∆ e bL∆ são as correções para cada extremidade do tubo,
dependendo do tipo de terminação, conforme descrito acima. Se mais de um tubo é utilizado para conectar a câmara do ressonador e o duto principal, a massa acústica total para Nfuros, tendo o mesmo comprimento e diâmetro, é dada pela seguinte expressão:
( )
furos2
ap0
furos2
ba0A
Na
L
Na
LLLM
π
ρ
π
∆∆ρ=
++= . 4.14
A reatância acústica, XA, pode se relacionar à massa acústica. Para isso, considerando um fluxo volumétrico instantâneo, senoidal, tem-se: tj
m eU)t(U ω= 4.15

28
onde, Um denota a amplitude do sinal. Substituindo a Eq. 4.15 na Eq. 4.5, é encontrada a relação entre a diferença de pressão acústica instantânea e o fluxo volumétrico instantâneo. Assim, tem-se:
( ) tj
mtj
mAA epeUMjdt
tdUM)t(p ωω ∆ω∆ === . 4.16
A reatância acústica para o elemento de massa é definida como:
Atjm
tjmA
A MjeU
eUMj
U
pX ω
ω∆ω
ω
=== , 4.17
onde, f2πω = , representa a freqüência angular da onda sonora.
4.2.1.2 Complacência acústica
A variação na força que age no elemento de armazenamento de energia, por exemplo, a mola mecânica, é proporcional ao deslocamento das extremidades desta mola ou à integral da velocidade no intervalo de tempo. Assim, tem-se:
∫∫ === dtuC
1dtukxkF
M
molamolamola ∆∆ 4.18
A quantidade kmola é a constante da mola e CM é a complacência mecânica (m/N). A relação análoga corresponde a um capacitor elétrico:
∫= dtiC
1e
E
∆ 4.19
A quantidade CE é a capacitância (Faraday). O elemento de capacitância que corresponde a um sistema acústico é o volume do gás, que é comprimido e expandido pelo gás que entra na câmara a um fluxo volumétrico U. Desta forma, para um volume fixo V, pode-se escrever o princípio de conservação da massa para o gás como:
Udt
dV 0ρ
ρ= 4.20
O processo de compressão/expansão acústica é reversível termodinamicamente e adiabático para pequenas amplitudes. Assim, a razão pressão-densidade para tal processo é isoentrópica e é dada como:
γγ ρρ 0
0ptetancons
p== 4.21

29
e
1
0
0p
d
dp −
= γ
γργ
ρρ 4.22
A quantidade p0 é a pressão atmosférica e γ é a razão de calores específicos para o gás. A taxa de variação no tempo da densidade do gás dentro do volume, a partir da Eq. 4.22, é:
dt
dp
pdt
d1
0
0−
=γ
γ
ργ
ρρ. 4.23
Combinando as Eqs. 4.23 e 4.20, obtém-se a seguinte expressão para o fluxo volumétrico dentro do volume:
( )
dt
dp
p
V
dt
dp
p
/VU
00
10
γγ
ρρ γ
≈=−
. 4.24
A expressão para a velocidade de uma onda sonora se propagando em um gás ideal é:
0
02 pTRc
ργγ == . 4.25
Substituindo a Eq. 4.25 na Eq. 4.24, tem-se:
dt
dp
c
VU
20ρ
= . 4.26
Separando as variáveis e integrando a Eq. 4.26, obtém-se a relação análoga para o elemento de complacência acústica:
∫ ∫== dtUC
1dtU
V
cp
A
20ρ
∆ . 4.27
onde, CA denota a complacência acústica (m3/Pa) ou (m5/N). Se a Eq. 4.15, para o fluxo volumétrico instantâneo, for substituída na Eq. 4.27, obtém-se a seguinte expressão para a diferença de pressão acústica instantânea para um elemento de complacência acústica:
( ) ∫ =−=== tjm
A
tjm
A
tjmtj
mA
epC
eUj
Cj
eUdteU
C
1tp ω
ωωω ∆
ωω∆ 4.28
A reatância acústica para um elemento complacente é:

30
A
A C
j
U
pX
ω
∆−== 4.29
4.2.1.3 Resistência acústica
A resistência mecânica num sistema é proporcionada pelo amortecimento, freqüentemente considerado como um amortecedor viscoso ou linear, no qual a força do amortecedor é diretamente proporcional à velocidade. Assim, tem-se: vRF Mramortecedo = 4.30
A quantidade RM é a resistência mecânica ou o coeficiente de amortecimento (N.s.m-1). A quantidade elétrica análoga é a resistência elétrica RE (ohm), definida pela lei de Ohm como: iRe E=∆ 4.31 A quantidade acústica análoga é a resistência acústica RA, definida como: URp A=∆ 4.32 A resistência acústica é dada em Pa.s/m3 ou N.s/m5. A resistência acústica em um tubo depende do tamanho da camada limite próxima à parede interna do tubo, relativa ao raio deste tubo. Esta relação é dada pela seguinte expressão, (Barron, 2003):
2/1
limite camada f2ar
=
µ
ρπ . 4.33
A quantidade µ é a viscosidade do gás no interior do tubo e a é o raio do tubo. A resistência ao atrito para o gás dentro do tubo é dada pelas seguintes expressões:
i. Tubos que satisfaçam a desigualdade, rcamada limite < 24 :
4Aa
L8R
π
µ= 4.34
ii. Tubos que satisfaçam a desigualdade, rcamada limite > 24 :
( )
+= 2
a
L
a
f4R
2
2/1
Aπ
ρµπ. 4.35
A resistência acústica de um orifício, omitindo a espessura, é dada como:
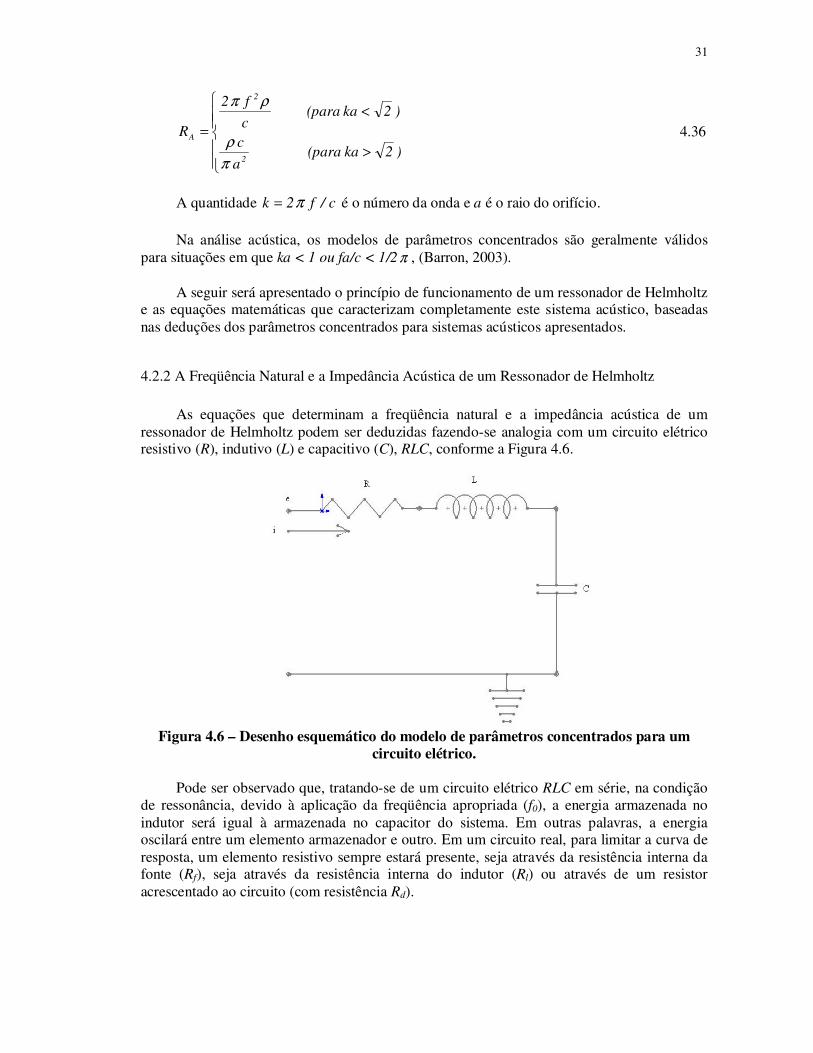
31
>
<
=
)2ka (para a
c
)2ka (para c
f2
R
2
2
A
π
ρ
ρπ
4.36
A quantidade c/f2k π= é o número da onda e a é o raio do orifício.
Na análise acústica, os modelos de parâmetros concentrados são geralmente válidos para situações em que ka < 1 ou fa/c < 1/2π , (Barron, 2003).
A seguir será apresentado o princípio de funcionamento de um ressonador de Helmholtz e as equações matemáticas que caracterizam completamente este sistema acústico, baseadas nas deduções dos parâmetros concentrados para sistemas acústicos apresentados.
4.2.2 A Freqüência Natural e a Impedância Acústica de um Ressonador de Helmholtz
As equações que determinam a freqüência natural e a impedância acústica de um ressonador de Helmholtz podem ser deduzidas fazendo-se analogia com um circuito elétrico resistivo (R), indutivo (L) e capacitivo (C), RLC, conforme a Figura 4.6.
Figura 4.6 – Desenho esquemático do modelo de parâmetros concentrados para um
circuito elétrico.
Pode ser observado que, tratando-se de um circuito elétrico RLC em série, na condição de ressonância, devido à aplicação da freqüência apropriada (f0), a energia armazenada no indutor será igual à armazenada no capacitor do sistema. Em outras palavras, a energia oscilará entre um elemento armazenador e outro. Em um circuito real, para limitar a curva de resposta, um elemento resistivo sempre estará presente, seja através da resistência interna da fonte (Rf), seja através da resistência interna do indutor (Rl) ou através de um resistor acrescentado ao circuito (com resistência Rd).

32
Determinação da Freqüência Natural do Circuito Elétrico A freqüência natural do circuito elétrico da Figura 4.6 pode ser determinada através do
cálculo da impedância total desse circuito (Boylestad, 2004). A combinação em série dos elementos resistivos forma uma única resistência, a
resistência equivalente (R): dlf RRRR ++= 4.37
Por sua vez, para uma freqüência específica (ω ), a impedância total deste circuito ( TZ ) é dada por (Boylestad, 2004):
C
jLjRZT ω
ω −+= 4.38
onde, L e C denotam as respectivas indutância e capacitância. Desenvolvendo a Eq. 4.38, tem-se:
−+=
CL
1LjRZT
ωω . 4.39
A condição de ressonância ocorre quando:
C
1L
ωω = , 4.40
ou seja, nesta condição, a impedância total torna-se igual a resistência equivalente: RZT = 4.41 A expressão 4.41 representa a condição de mínimo valor possível para ZT . Ou seja, na condição da expressão 4.40 a impedância do circuito é minimizada.
Assim, a freqüência angular de ressonância ( 0ω ) para o circuito elétrico da Figura 4.6
pode ser determinada como função da indutância e da capacitância do circuito como:
LC
10 =ω 4.42
ou
LC2
1f0
π= 4.43
onde, de acordo com o SI, deve-se ter f0 em hertz (Hz), L em henries (H) e C em farads (F).

33
Por sua vez, a corrente através do circuito elétrico (I), na condição de ressonância, é dada por (Boylestad, 2004):
00
0
0R
E
0R
0EI <=
<
<= , 4.44
onde E denota a tensão atuante. Pela Eq. 4.44 a tensão de entrada e a corrente estão em fase na ressonância.
O valor de I dado pela Eq. 4.44 representa o maior valor possível de corrente no circuito, para uma tensão aplicada E, já que R representa o valor mínimo de ZT .
Por sua vez, na condição de ressonância, as tensões no indutor e no capacitor são iguais em módulo (Boylestad, 2004), ou seja: CL EE = 4.45
Determinação da Impedância Total do Circuito Elétrico
A impedância total do circuito elétrico da Figura 4.6 pode ser determinada através do cálculo da impedância total desse circuito (Boylestad, 2004). Assim, substituindo a Eq. 4.42 na Eq. 4.39, tem-se:
−+=
ω
ωω
20LjRZ . 4.46
Mas a Eq. 4.46 não é a forma mais usual de se apresentar a impedância total. Desta maneira, a impedância elétrica pode ser escrita na seguinte forma alternativa, mais usual:
−+=
f
f
f
fjQ1RZ 0
0
, 4.47
onde,
R
Lf2Q 0π
= é definido como o fator de qualidade.
O fator de qualidade fornece uma medida da qualidade ou da agudeza da curva de ressonância, (Barron, 2003) e (Boylestad, 2004). O fator de qualidade em um sistema elétrico é análogo ao fator de qualidade devido a razão de amortecimento para um sistema de vibração mecânica. Um grande valor do fator de qualidade significa que há uma pequena resistência total presente no circuito elétrico. Determinação da Freqüência Natural do Ressonador de Helmholtz O circuito da Figura 4.7 representa um análogo acústico ao circuito elétrico da Figura 4.6.
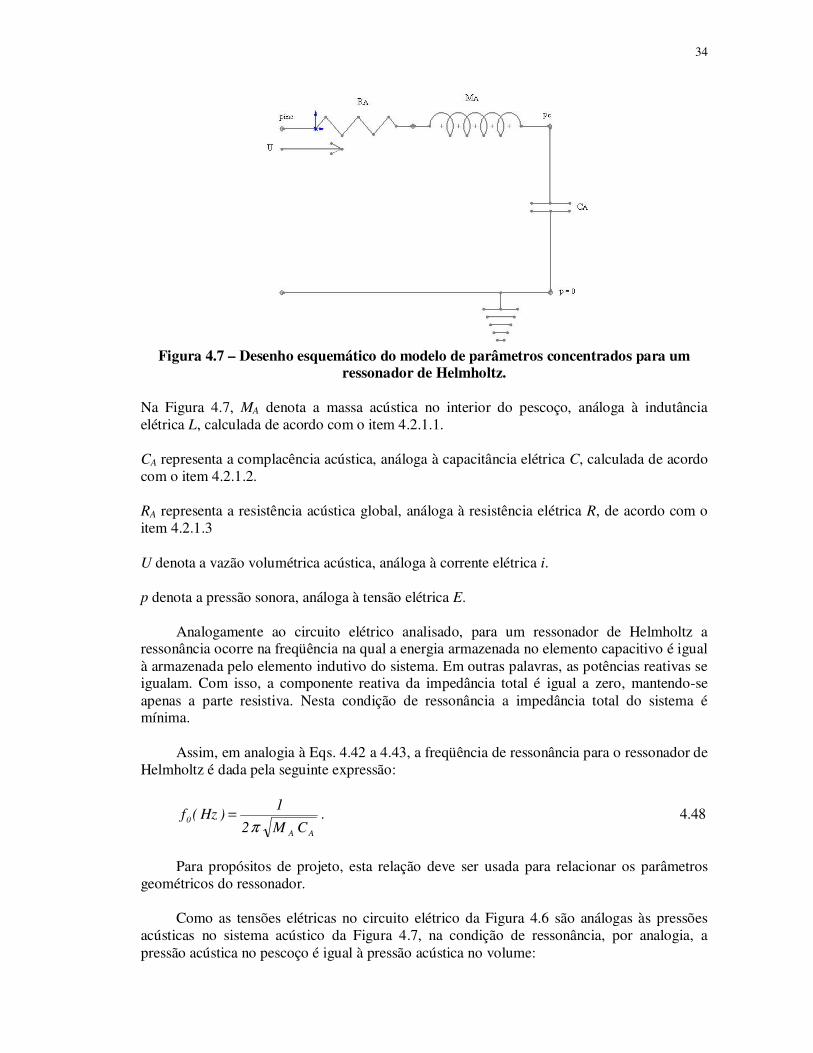
34
Figura 4.7 – Desenho esquemático do modelo de parâmetros concentrados para um
ressonador de Helmholtz. Na Figura 4.7, MA denota a massa acústica no interior do pescoço, análoga à indutância elétrica L, calculada de acordo com o item 4.2.1.1. CA representa a complacência acústica, análoga à capacitância elétrica C, calculada de acordo com o item 4.2.1.2. RA representa a resistência acústica global, análoga à resistência elétrica R, de acordo com o item 4.2.1.3 U denota a vazão volumétrica acústica, análoga à corrente elétrica i. p denota a pressão sonora, análoga à tensão elétrica E.
Analogamente ao circuito elétrico analisado, para um ressonador de Helmholtz a ressonância ocorre na freqüência na qual a energia armazenada no elemento capacitivo é igual à armazenada pelo elemento indutivo do sistema. Em outras palavras, as potências reativas se igualam. Com isso, a componente reativa da impedância total é igual a zero, mantendo-se apenas a parte resistiva. Nesta condição de ressonância a impedância total do sistema é mínima.
Assim, em analogia à Eqs. 4.42 a 4.43, a freqüência de ressonância para o ressonador de
Helmholtz é dada pela seguinte expressão:
AA
0CM2
1)Hz(f
π= . 4.48
Para propósitos de projeto, esta relação deve ser usada para relacionar os parâmetros geométricos do ressonador. Como as tensões elétricas no circuito elétrico da Figura 4.6 são análogas às pressões acústicas no sistema acústico da Figura 4.7, na condição de ressonância, por analogia, a pressão acústica no pescoço é igual à pressão acústica no volume:

35
CAMA pp = . 4.49
Também, por analogia, a vazão volumétrica acústica (U) é máxima na condição de ressonância. Determinação da Impedância Acústica do Ressonador de Helmholtz Analogamente à análise do circuito elétrico RLC, em série, discutido anteriormente, representado pela Figura 4.6, a impedância acústica do ressonador de Helmholtz pode ser representada como:
A
AAi
A C
jMjR
U
pZ
ωω −+== . 4.50
A impedância acústica indica quanto o ressonador de Helmholtz “controla ou impede” a
passagem de energia acústica. Para operações no estado permanente, a impedância acústica para o ressonador de Helmholtz, em analogia à Eq. 4.47, pode ser escrita na seguinte forma mais usual (Barron, 2003):
−+=
f
f
f
fjQ1RZ 0
0AAA , 4.51
onde, A
A0A R
Mf2Q
π= é definido como o fator de qualidade. O fator de qualidade acústica
permite uma medida da qualidade ou da agudeza de se ajustar o ressonador de Helmholtz, (Barron, 2003). Assim, um grande valor do fator de qualidade implica que há uma pequena resistência acústica presente no sistema. O fator de qualidade em um sistema acústico é análogo ao fator de qualidade devido a razão de amortecimento para um sistema de vibração mecânica. O módulo da impedância acústica pode ser calculado a partir da Eq. 4.51 como:
( ) ( )[ ] 2/1200
2AA
2/122A f/ff/fQ1RImReZ −+=+= . 4.52
Na ressonância, o módulo da impedância acústica é igual à resistência acústica total do
sistema ressonador. Com isso, a resistência acústica RA pode ser calculada através dessa relação. Também, outras relações serão deduzidas a seguir a partir do módulo da impedância. O ângulo de fase φ entre a pressão acústica incidente e o fluxo volumétrico através do pescoço do tubo do ressonador pode ser determinado a partir da Eq. 4.51. Assim, tem-se: ( ) ( ) ( )[ ]f/ff/fQRe/ Imtan 00A −==φ 4.53
Na ressonância, o ângulo de fase 0=φ . Para as outras freqüências, que não a ressonante, o ângulo de fase oscilara entre -900 e 900.

36
4.2.3 Largura da Banda da Meia-Potência
Um gráfico da razão de potências como função da razão de freqüências é ilustrado na Figura 4.8. Esta figura introduz o conceito da largura de banda da meia potência, que é uma medida qualitativa da agudeza da forma da função de ressonância. Esta quantidade é definida como a diferença entre duas freqüências f1 e f2, chamadas de freqüências de meia potência, porque as correspondentes potências sonoras (W1=W2) representam metade da potência sonora de ressonância (W0). Assim, a razão de potências W1/W0 = W2/W0 = ½ (Barron, 2003). A curva é simétrica em relação a f0, tal que f0-f1 = f2-f0.
Figura 4.8 – Ilustração da largura da banda de meia potência.
Conforme (Barron, 2003), a potência acústica (W) fornecida ao ressonador para uma dada freqüência (f) pode ser calculada como:
A
2
A
inA
2 RZ
pRUW
== 4.54
Na ressonância, a potência acústica média fornecida ao ressonador é igual à potência
dissipada no elemento de resistência, porque os elementos capacitivos e de massa apenas armazenam a energia acústica momentaneamente e não dissipam esta energia.
De acordo com explicações do sistema elétrico, para o sistema acústico, na ressonância,
têm-se AA RZ = . Com isso, a Eq. 4.54 assume a forma particular:
A
2in
0 R
pW = 4.55
Por sua vez, substituindo o módulo da impedância ZA, conforme Eq. 4.52, na Eq. 4.54, obtém-se:
( )
( ) ( )[ ]200
2A
A2in
f/ff/fQ1
R/pW
−+= 4.56
A partir da Eq. 4.56, pode-se escrever, na forma adimensional, a razão de potências sonoras como:

37
( ) ( )[ ]2
0o2A0 f/ff/fQ1
1
W
W
−+= 4.57
Analisando a Eq. 4.57, a razão de potências vale 1 (um) quando a freqüência de
perturbação (f) for igual à freqüência de ressonância (f0). Da Eq. 4.57, pode-se obter dois valores de freqüência para os quais a razão de potências iguala-se a 1/2, quais sejam:
i. ( )
A
2/12A
01 Q2
1Q41ff
−+= , correspondendo à menor freqüência da largura de banda
da meia-potência;
ii. ( )
A
2/12A
02 Q2
1Q41ff
++= , correspondendo à maior freqüência da largura de banda
da meia-potência. Assim, a largura de banda da meia-potência é encontrada como:
A
012 Q
fff =− 4.58
Por outro lado, multiplicando-se as freqüências de meia potência (f1 e f2), pode–se obter a seguinte relação: ( ) 2/1
210 fff = 4.59
Aplicando-se o logaritmo à Eq. 4.60, pode–se obter (Barron, 2003):
( ) ( )[ ] 2
002A0 f/ff/fQ1log10NWSNWSNWS −+=−=∆ 4.60
onde, NWS0 e NWS representam os níveis de potência sonora na ressonância e na freqüência arbitrária f, respectivamente, e NWS∆ denota o decaimento do nível de potência sonora. Para razões de freqüência em torno de dez (f/f0 = 10), o decaimento do nível de potência sonora é de 6 dB/oitava.
4.2.4 Perda por Transmissão
A perda por transmissão é um parâmetro de desempenho acústico que representa a atenuação no nível de potência sonora através de um silenciador. A perda por transmissão para um ressonador de Helmholtz pode ser avaliada através da pressão na junção do pescoço do ressonador (vide Figura 4.9).
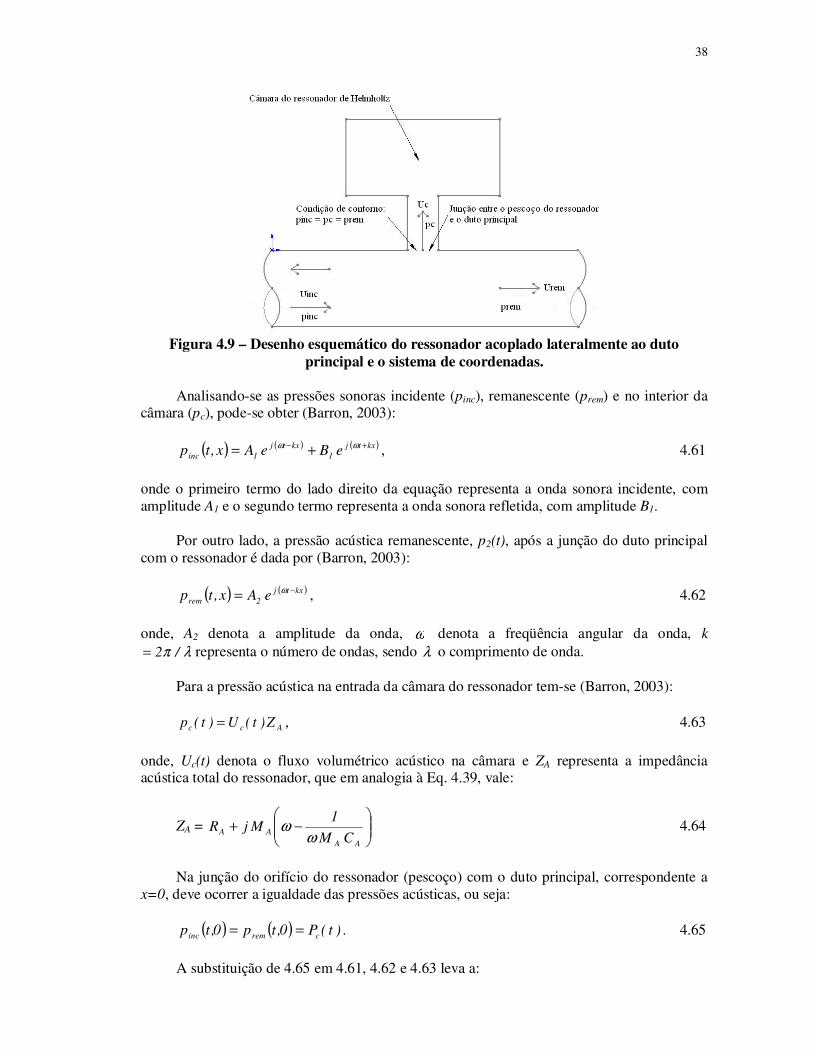
38
Figura 4.9 – Desenho esquemático do ressonador acoplado lateralmente ao duto
principal e o sistema de coordenadas.
Analisando-se as pressões sonoras incidente (pinc), remanescente (prem) e no interior da câmara (pc), pode-se obter (Barron, 2003): ( ) ( ) ( )kxtj
1kxtj
1inc eBeAx,tp +− += ωω , 4.61
onde o primeiro termo do lado direito da equação representa a onda sonora incidente, com amplitude A1 e o segundo termo representa a onda sonora refletida, com amplitude B1. Por outro lado, a pressão acústica remanescente, p2(t), após a junção do duto principal com o ressonador é dada por (Barron, 2003): ( ) ( )kxtj
2rem eAx,tp −= ω , 4.62
onde, A2 denota a amplitude da onda, ω denota a freqüência angular da onda, k
λπ /2= representa o número de ondas, sendo λ o comprimento de onda. Para a pressão acústica na entrada da câmara do ressonador tem-se (Barron, 2003): Acc Z)t(U)t(p = , 4.63
onde, Uc(t) denota o fluxo volumétrico acústico na câmara e ZA representa a impedância acústica total do ressonador, que em analogia à Eq. 4.39, vale:
ZA =
−+
AAAA CM
1MjR
ωω 4.64
Na junção do orifício do ressonador (pescoço) com o duto principal, correspondente a x=0, deve ocorrer a igualdade das pressões acústicas, ou seja: ( ) ( ) )t(P0,tp0,tp creminc == . 4.65
A substituição de 4.65 em 4.61, 4.62 e 4.63 leva a:

39
Ac211 ZUABA ==+ 4.66
Por outro lado, para o fluxo volumétrico acústico à montante da junção, Uinc(t), vale (Barron, 2003):
( ) ( )[ ]kxtj1
kxtj1
0
dutoinc eBeA
c
S)x,t(U +− −
= ωω
ρ 4.67
onde, Sduto denota a área da seção transversal do duto principal, 0ρ a massa especifica do
fluido no escoamento e c a velocidade de propagação sonora termodinâmica. Por sua vez, o fluxo volumétrico à jusante da junção, Urem(t), vale (Barron, 2003):
( )[ ]kxtj2
0
dutorem eA
c
S)x,t(U −
= ω
ρ. 4.68
De forma equivalente, na junção do orifício do ressonador (pescoço) com o duto
principal, correspondente a x=0, deve ocorrer a igualdade dos fluxos acústicos, ou seja: )t(U)0,t(U)0,t(U creminc += , 4.69
condição que, levada nas equações 4.66, 4.67 e 4.68, fornece:
( )( )
A
11duto211 Z
BAS2c0ABA
++=−
ρ 4.70
Eliminando o termo B1 entre as equações 4.66 e 4.70, obtêm-se a seguinte expressão para a razão dos coeficientes A1 e A2:
( )
A
Aduto
2
1
Z
ZS2c0
A
A +=
ρ 4.71
Para o ressonador de Helmholtz, o coeficiente de transmissão da potência sonora ( tα ) é
definido como a razão entre a potência sonora transmitida e a potência sonora incidente na junção (Barron, 2003). Assim, a partir da Eq. 4.71, pode-se obter:
( )[ ]2
AAA
2dutoA
2
AAA
2A2
1
2
2
in
rem
in
remt
CM
1MS2c0R
CM
1MR
A
A
P
P
W
W
−++
−+
====
ωωρ
ωω
α
4.72
40
Finalmente, a perda por transmissão na ressonância para o silenciador (PT0) está relacionada com o coeficiente de transmissão da potência sonora ( tα ) da seguinte forma
(Barron, 2003):
maxt
10max0
1log10PTPT
==
α 4.73
As perdas por transmissão PT1 e PT2, referentes às freqüências f1 e f2 da largura da banda da meia-potência, respectivamente, relacionam-se com PT0 da seguinte maneira (Barron, 2003):
dB3PT1
5,0log10PTPT 0
maxt21 −=
==
α 4.74
4.2.5 Resistência Acústica Adicional
Em muitos casos de projeto, uma resistência acústica adicional, na forma de uma tela metálica, pode ser acrescentada para se alcançar a resistência acústica total requerida. O acréscimo na resistência total devido à presença de tela ( ∆ Rress) relaciona-se com a resistência acústica específica total da tela (Rtela) da seguinte forma (Barron, 2003):
furos
2telatela
ressNa
RNR
π∆ = . 4.75
onde, Ntela representa o número de camadas de tela, a o raio do orifício e Nfuros o número de furos do ressonador.
A resistência acústica específica para uma tela metálica (Rtela) é um dado do fabricante (Barron, 2003).
Assim, com a utilização de telas metálicas, a resistência total do ressonador de
Helmholtz passa a valer:
ressressdisp RRR ∆+= 4.76
onde, Rdisp denota a resistência acústica especifica disponibilizada. A instalação de tela(s) metálica(s) cobrindo cada furo reduz o número total de furos à medida que ressR∆ aumenta,
tornando o ressonador mais compacto.
4.2.6 Raio Ótimo do Furo em Função da Resistência Acústica Adicional
O raio do furo do ressonador pode ser calculado em função de uma resistência acústica adicional. Assim, se for utilizada apenas uma camada de tela metálica sobre cada um dos furos do ressonador, a resistência acústica específica total (Rc) é igual à resistência acústica específica da tela escolhida (Rc1). Assim, a resistência acústica (RA) e a massa acústica (MA) são dadas pelas Eqs. 4.36 e 4.7, respectivamente. Para extremidades dos tubos flangeadas, a Eq. 4.12 torna-se:
41
( )[ ]
furos2
0
furos2
ap0A
Na
3/a16L
Na
LM
π
πρ
π
ρ +== 4.77
Para evidenciar o raio a do furo é necessário resolver a razão entre a massa acústica e a resistência acústica, dada como:
( )[ ]
disp
0
A
A
R
3/a16L
R
M πρ += . 4.78
Manipulando a Eq. 4.78, tem-se:
−= L
R
RM
16
3a
0A
dispA
ρ
π 4.79
4.2.7 Número Ótimo de Furos em Função da Resistência Acústica Adicional
A partir das Eqs. 4.77 e 4.79 o número total de furos requeridos é encontrado como segue:
A
dispfuros Ra
RN
2π= 4.80
4.2.8 Algumas Características Construtivas de um Ressonador de Helmholtz
Neste item são apresentadas as principais estruturas que compõem os ressonadores de
Helmholtz. Câmara do Ressonador O costado da câmara pode ser fabricado em chapa de aço estrutural (ASTM A283 Grau B) ou em aço comum (SAE 1020) com espessura variável, de acordo com as necessidades de cada projeto, confeccionadas através de procedimentos de caldeiraria e soldagem. Normalmente, no caso de um aço comum, o costado do equipamento deve contar com reforço estrutural externo e interno para manter sua integridade no processo de transporte, montagem e de carregamento. Também, são instalados olhais na parte superior do mesmo para a movimentação de carga. Para o tratamento de sistemas de exaustão, tendo em vista as altas temperaturas, acima de 4000C, é recomendado pintar todo o dispositivo com acabamento em alumínio refratário 6000C, 30 micras. Se houver necessidade de proteção pessoal é recomendado aplicar isolamento térmico externamente ao costado.
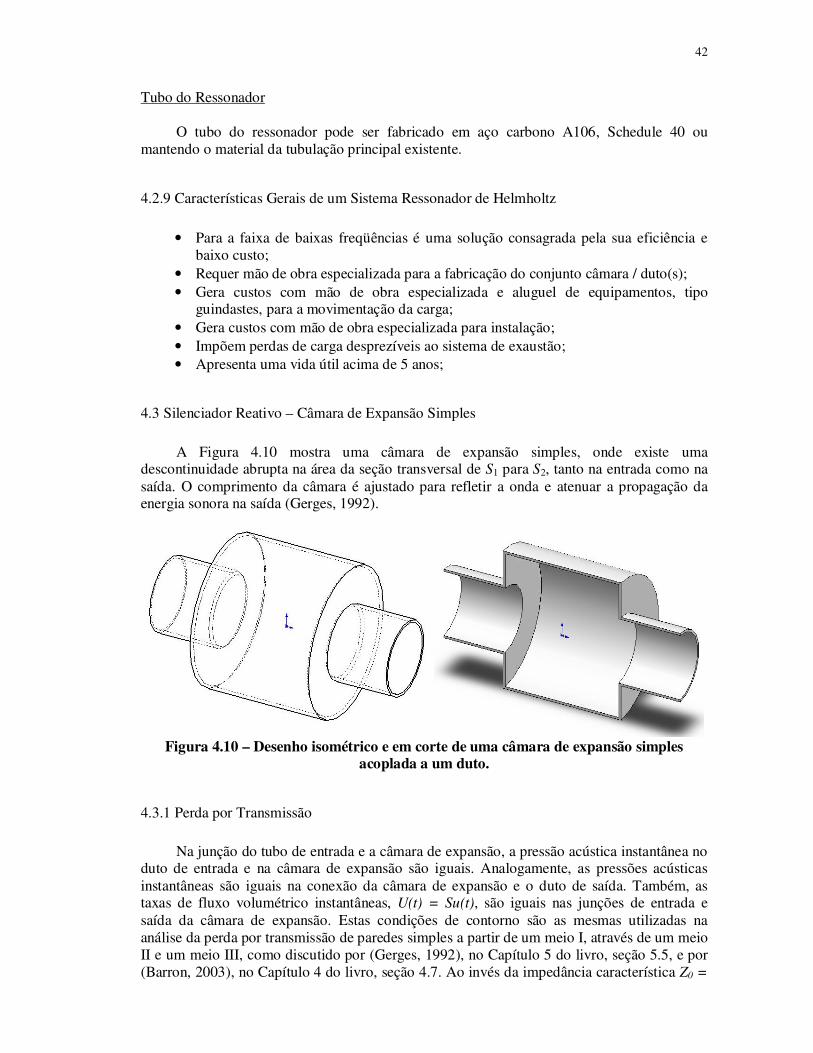
42
Tubo do Ressonador O tubo do ressonador pode ser fabricado em aço carbono A106, Schedule 40 ou mantendo o material da tubulação principal existente.
4.2.9 Características Gerais de um Sistema Ressonador de Helmholtz
• Para a faixa de baixas freqüências é uma solução consagrada pela sua eficiência e
baixo custo; • Requer mão de obra especializada para a fabricação do conjunto câmara / duto(s); • Gera custos com mão de obra especializada e aluguel de equipamentos, tipo
guindastes, para a movimentação da carga; • Gera custos com mão de obra especializada para instalação; • Impõem perdas de carga desprezíveis ao sistema de exaustão; • Apresenta uma vida útil acima de 5 anos;
4.3 Silenciador Reativo – Câmara de Expansão Simples
A Figura 4.10 mostra uma câmara de expansão simples, onde existe uma descontinuidade abrupta na área da seção transversal de S1 para S2, tanto na entrada como na saída. O comprimento da câmara é ajustado para refletir a onda e atenuar a propagação da energia sonora na saída (Gerges, 1992).
Figura 4.10 – Desenho isométrico e em corte de uma câmara de expansão simples
acoplada a um duto.
4.3.1 Perda por Transmissão
Na junção do tubo de entrada e a câmara de expansão, a pressão acústica instantânea no duto de entrada e na câmara de expansão são iguais. Analogamente, as pressões acústicas instantâneas são iguais na conexão da câmara de expansão e o duto de saída. Também, as taxas de fluxo volumétrico instantâneas, U(t) = Su(t), são iguais nas junções de entrada e saída da câmara de expansão. Estas condições de contorno são as mesmas utilizadas na análise da perda por transmissão de paredes simples a partir de um meio I, através de um meio II e um meio III, como discutido por (Gerges, 1992), no Capítulo 5 do livro, seção 5.5, e por (Barron, 2003), no Capítulo 4 do livro, seção 4.7. Ao invés da impedância característica Z0 =

43
ρ0c, é a impedância acústica ZA = ρ0c/S = Z0/S que aparece na expressão final para o coeficiente de transmissão da potência sonora (αt). Como o gás é o mesmo em todas as seções do silenciador, as razões de impedância tornam-se razões de área. Assim, tem-se:
ν≡==1
3
3
1
3
1
S
S
Z
Z
Z
Z
A
A 4.81
mS
S
Z
Z
Z
Z
A
A ≡==1
2
2
1
2
1 4.82
mS
S
Z
Z
Z
Z
A
A /2
3
3
2
3
2 ν≡== 4.83
Substituindo as Eqs. 4.81 a 4.83 na equação do coeficiente de transmissão da potência sonora de paredes simples obtêm-se a seguinte expressão para o coeficiente de transmissão da potência sonora para uma câmara de expansão:
( ) ( ) ( )kLsenm
vmkLv
vt
22
22 cos1
4
+++
=α 4.84
onde kL = 2πfL/c denota o número de onda e L representa o comprimento da câmara de expansão. A Eq. 4.84 pode ser escrita de maneira mais usual substituindo a seguinte identidade trigonométrica: cos2(kL) = 1-sen2(kL) 4.85 Assim, para o recíproco do coeficiente de transmissão da potência sonora, tem-se:
( ) ( ) ( )
v
kLsenvm
vmv
t 4
111
222
2
+−
+++
=α
4.86
O segundo termo do numerador da Eq. 4.86 pode ser manipulado da seguinte forma:
( ) ( ) ( )
v
kLsenvm
vmv
t 4
111
222
2
−−
−++
=α
4.87
Considerando o caso especial no qual os dutos de entrada e de saída apresentam a mesma seção transversal, ν = 1 (Gerges, 1992), a Eq. 4.87 é reduzida para a seguinte expressão:
44
( )kLsenm
mt
22
1
4
11
1
−+=
α 4.88
Pode ser observado a partir da Eq. 4.87 que a perda por transmissão apresenta um máximo para as freqüências correspondentes à seguinte condição de contorno:
( ),...,,n nc
LfkL 321
2
12 0 =
−== π
π 4.89
onde,
( ),...,,n L
cnf 321
22
1
0 =
−
= 4.90
A expressão da perda por transmissão máxima, que ocorre para a freqüência f0, pode ser obtida combinando as Eqs. 4.87 e 4.89:
( ) ( )
v
vm
vmv
t 4
111
22
2
max
−−
−++
=
α 4.91
Para o caso especial de ν = 1, a perda por transmissão máxima é dada pela seguinte expressão:
2
max
1
4
11
1
−+=
mm
tα 4.92
Pode ser observado que a perda por transmissão apresenta um mínimo para as freqüências correspondentes à seguinte condição de contorno: ( ),...3,2,1== n nkL π 4.93 onde,
( ) n L
cnf ,...3,2,1
2== 4.94
A expressão da perda por transmissão mínima é dada como:
( )
v
v
t 4
11 2
min
+=
α 4.95
Para o caso especial de ν = 1, a perda por transmissão mínima é dada pela seguinte
expressão:
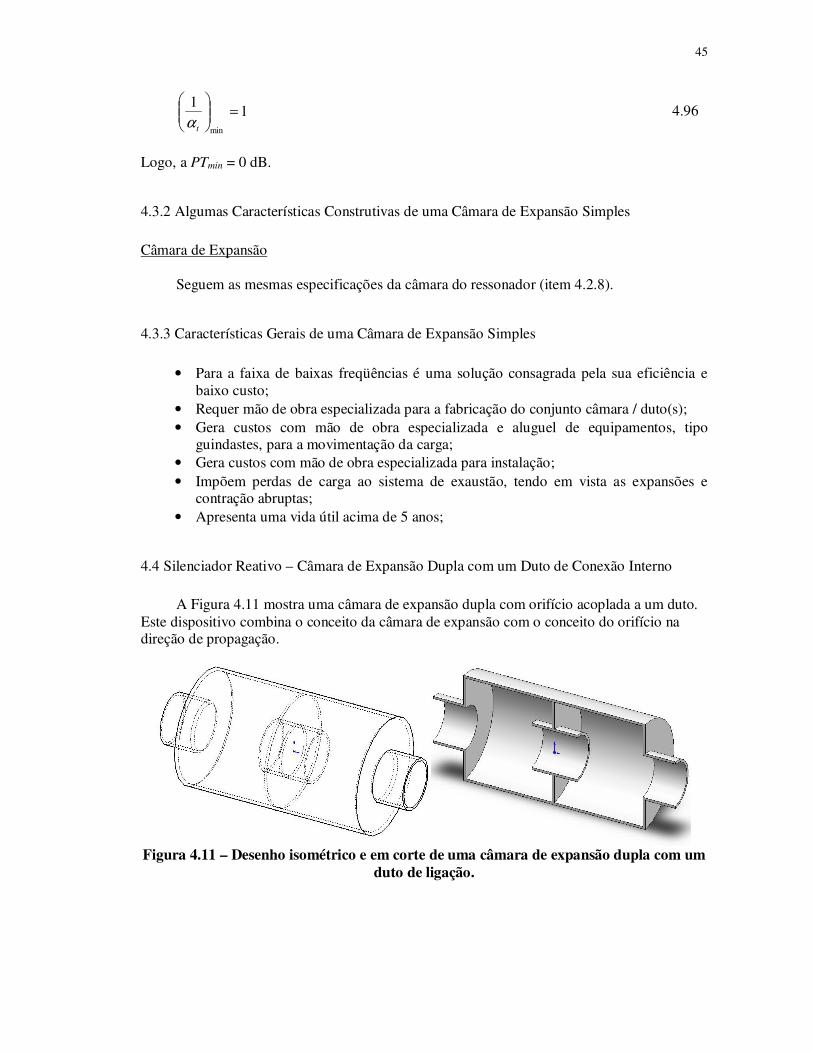
45
11
min
=
tα 4.96
Logo, a PTmin = 0 dB.
4.3.2 Algumas Características Construtivas de uma Câmara de Expansão Simples
Câmara de Expansão Seguem as mesmas especificações da câmara do ressonador (item 4.2.8).
4.3.3 Características Gerais de uma Câmara de Expansão Simples
• Para a faixa de baixas freqüências é uma solução consagrada pela sua eficiência e
baixo custo; • Requer mão de obra especializada para a fabricação do conjunto câmara / duto(s); • Gera custos com mão de obra especializada e aluguel de equipamentos, tipo
guindastes, para a movimentação da carga; • Gera custos com mão de obra especializada para instalação; • Impõem perdas de carga ao sistema de exaustão, tendo em vista as expansões e
contração abruptas; • Apresenta uma vida útil acima de 5 anos;
4.4 Silenciador Reativo – Câmara de Expansão Dupla com um Duto de Conexão Interno
A Figura 4.11 mostra uma câmara de expansão dupla com orifício acoplada a um duto. Este dispositivo combina o conceito da câmara de expansão com o conceito do orifício na direção de propagação.
Figura 4.11 – Desenho isométrico e em corte de uma câmara de expansão dupla com um
duto de ligação.

46
4.4.1 Perda por Transmissão
Para silenciadores com duas ou mais câmaras de expansão, é mais conveniente realizar a análise utilizando a aproximação de matriz de transferência para elementos reativos, (Beranek e Vér, 1992) e (Barron, 2003). A matriz de transferência de um elemento silenciador é uma função da geometria do elemento, das variáveis de estado do meio, vazão volumétrica média, entre outras, conforme deduzido por Beranek e Vér, (1992). Esta é a base para se deduzir o coeficiente de transmissão da potência sonora através do elemento silenciador e se calcular a perda por transmissão do conjunto como um todo. Desta forma, baseado na aproximação de matriz de transferência, os resultados para o coeficiente de transmissão da potência sonora (ou o recíproco) para uma câmara de expansão dupla com um duto de conexão interno é dada pela seguinte expressão, (Barron, 2003) e (Davis et al., 1954):
22
21
1GG
t
+=
α 4.97
As quantidades G1 e G2 são definidas pelas seguintes expressões: ( ) ( ) ( ) ( )dutocâmaracâmara kLkLsenmkLG tan212cos1 −−= 4.98
( ) ( ) ( ) ( )câmaracâmaraduto kLsenm
mm
mkLm
mkLmG 21
2
112cos
1tan1
2
12
++
−−
+−=
4.99 onde, dutoL denota a metade do duto de conexão, câmaraL representa o comprimento de uma das
câmaras de expansão, m denota a razão das áreas das seções transversais (Eq. 4.82) e k = 2πf/c denota o número de onda da freqüência corrente. O desempenho do silenciador é muito bom quando o comprimento total do duto interno, de conexão, é igual ao comprimento de uma das câmaras, ou seja, 2Lduto = Lcâmara dupla (Barron,
2003). A maior atenuação ocorre quando π2
1=dutokL , pois o termo ( )dutokLtan , nas Eqs. 4.98
e 4.99, torna-se muito elevado, acima de 1 x 105.
4.4.2 Algumas Características Construtivas de uma Câmara de Expansão Dupla
Câmara de Expansão Dupla Seguem as mesmas especificações da câmara do ressonador (item 4.2.8). Duto de Conexão Interna
O duto de conexão interno às câmaras pode ser fabricado em aço carbono A106, Schedule 40 ou mantendo o material da tubulação principal existente e o diâmetro.

47
4.4.3 Características Gerais de uma Câmara de Expansão Simples
Idem às características de uma câmara de expansão simples, porém bem mais eficiente.
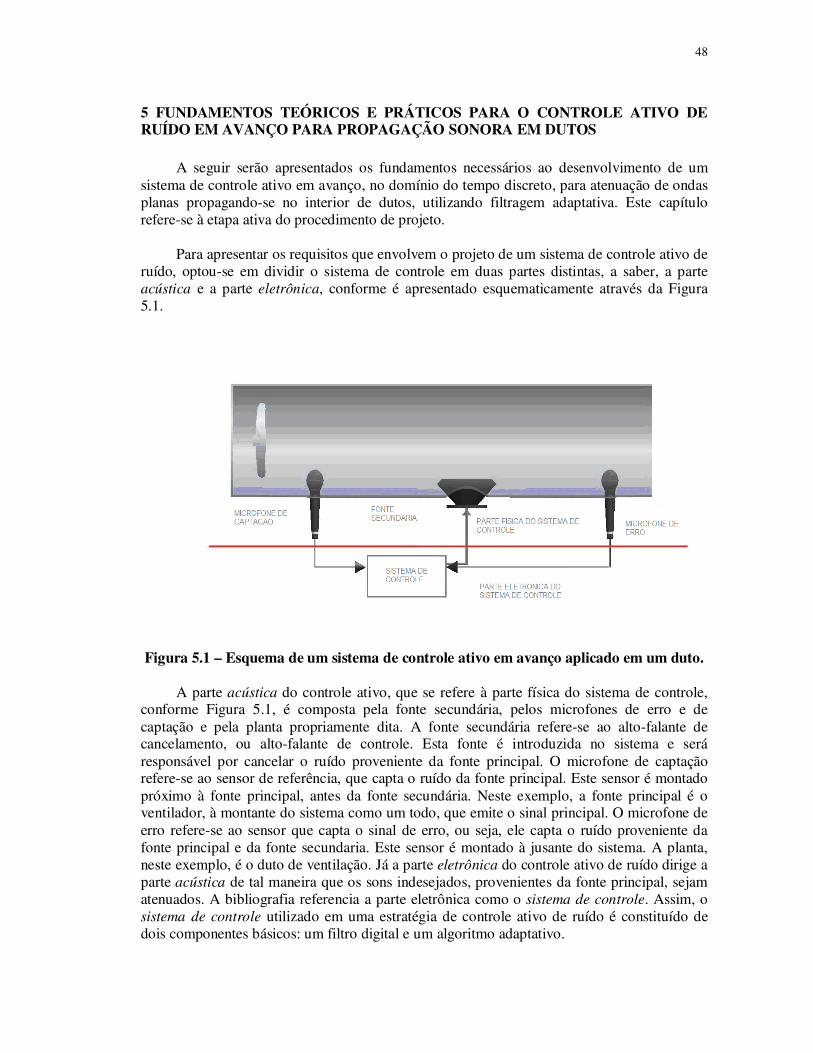
48
5 FUNDAMENTOS TEÓRICOS E PRÁTICOS PARA O CONTROLE ATIVO DE RUÍDO EM AVANÇO PARA PROPAGAÇÃO SONORA EM DUTOS
A seguir serão apresentados os fundamentos necessários ao desenvolvimento de um sistema de controle ativo em avanço, no domínio do tempo discreto, para atenuação de ondas planas propagando-se no interior de dutos, utilizando filtragem adaptativa. Este capítulo refere-se à etapa ativa do procedimento de projeto.
Para apresentar os requisitos que envolvem o projeto de um sistema de controle ativo de ruído, optou-se em dividir o sistema de controle em duas partes distintas, a saber, a parte acústica e a parte eletrônica, conforme é apresentado esquematicamente através da Figura 5.1.
Figura 5.1 – Esquema de um sistema de controle ativo em avanço aplicado em um duto.
A parte acústica do controle ativo, que se refere à parte física do sistema de controle,
conforme Figura 5.1, é composta pela fonte secundária, pelos microfones de erro e de captação e pela planta propriamente dita. A fonte secundária refere-se ao alto-falante de cancelamento, ou alto-falante de controle. Esta fonte é introduzida no sistema e será responsável por cancelar o ruído proveniente da fonte principal. O microfone de captação refere-se ao sensor de referência, que capta o ruído da fonte principal. Este sensor é montado próximo à fonte principal, antes da fonte secundária. Neste exemplo, a fonte principal é o ventilador, à montante do sistema como um todo, que emite o sinal principal. O microfone de erro refere-se ao sensor que capta o sinal de erro, ou seja, ele capta o ruído proveniente da fonte principal e da fonte secundaria. Este sensor é montado à jusante do sistema. A planta, neste exemplo, é o duto de ventilação. Já a parte eletrônica do controle ativo de ruído dirige a parte acústica de tal maneira que os sons indesejados, provenientes da fonte principal, sejam atenuados. A bibliografia referencia a parte eletrônica como o sistema de controle. Assim, o sistema de controle utilizado em uma estratégia de controle ativo de ruído é constituído de dois componentes básicos: um filtro digital e um algoritmo adaptativo.
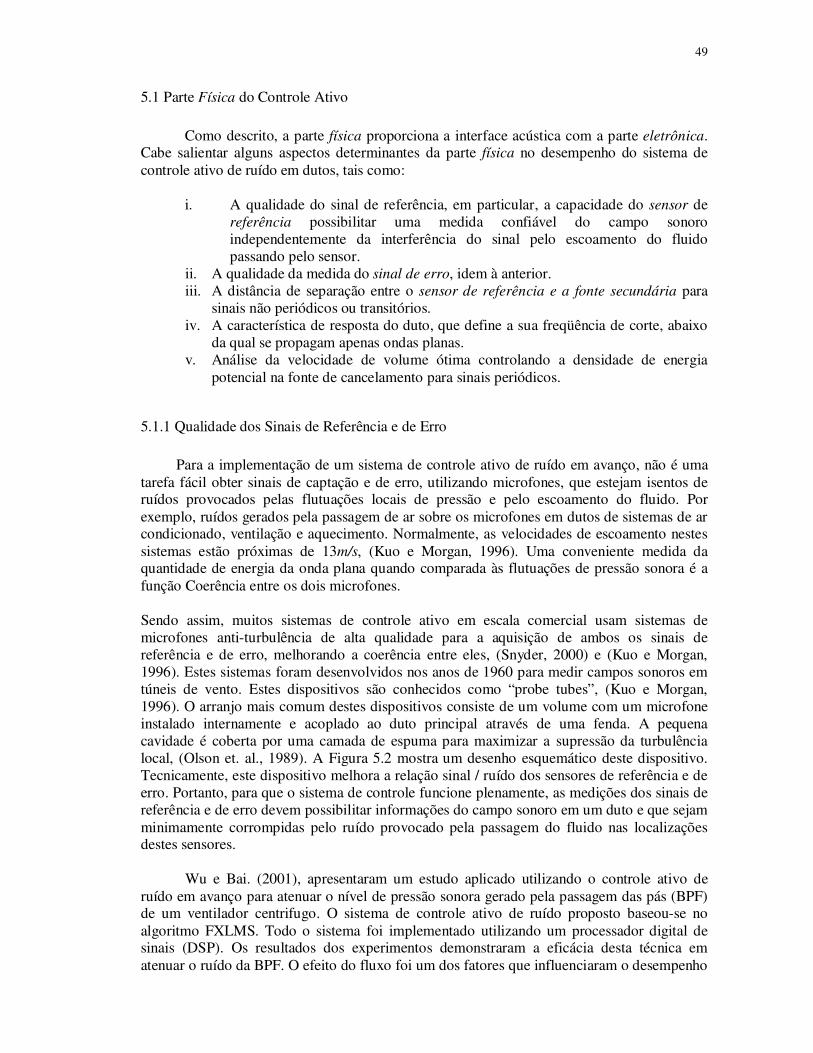
49
5.1 Parte Física do Controle Ativo
Como descrito, a parte física proporciona a interface acústica com a parte eletrônica.
Cabe salientar alguns aspectos determinantes da parte física no desempenho do sistema de controle ativo de ruído em dutos, tais como:
i. A qualidade do sinal de referência, em particular, a capacidade do sensor de
referência possibilitar uma medida confiável do campo sonoro independentemente da interferência do sinal pelo escoamento do fluido passando pelo sensor.
ii. A qualidade da medida do sinal de erro, idem à anterior. iii. A distância de separação entre o sensor de referência e a fonte secundária para
sinais não periódicos ou transitórios. iv. A característica de resposta do duto, que define a sua freqüência de corte, abaixo
da qual se propagam apenas ondas planas. v. Análise da velocidade de volume ótima controlando a densidade de energia
potencial na fonte de cancelamento para sinais periódicos.
5.1.1 Qualidade dos Sinais de Referência e de Erro
Para a implementação de um sistema de controle ativo de ruído em avanço, não é uma
tarefa fácil obter sinais de captação e de erro, utilizando microfones, que estejam isentos de ruídos provocados pelas flutuações locais de pressão e pelo escoamento do fluido. Por exemplo, ruídos gerados pela passagem de ar sobre os microfones em dutos de sistemas de ar condicionado, ventilação e aquecimento. Normalmente, as velocidades de escoamento nestes sistemas estão próximas de 13m/s, (Kuo e Morgan, 1996). Uma conveniente medida da quantidade de energia da onda plana quando comparada às flutuações de pressão sonora é a função Coerência entre os dois microfones.
Sendo assim, muitos sistemas de controle ativo em escala comercial usam sistemas de microfones anti-turbulência de alta qualidade para a aquisição de ambos os sinais de referência e de erro, melhorando a coerência entre eles, (Snyder, 2000) e (Kuo e Morgan, 1996). Estes sistemas foram desenvolvidos nos anos de 1960 para medir campos sonoros em túneis de vento. Estes dispositivos são conhecidos como “probe tubes”, (Kuo e Morgan, 1996). O arranjo mais comum destes dispositivos consiste de um volume com um microfone instalado internamente e acoplado ao duto principal através de uma fenda. A pequena cavidade é coberta por uma camada de espuma para maximizar a supressão da turbulência local, (Olson et. al., 1989). A Figura 5.2 mostra um desenho esquemático deste dispositivo. Tecnicamente, este dispositivo melhora a relação sinal / ruído dos sensores de referência e de erro. Portanto, para que o sistema de controle funcione plenamente, as medições dos sinais de referência e de erro devem possibilitar informações do campo sonoro em um duto e que sejam minimamente corrompidas pelo ruído provocado pela passagem do fluido nas localizações destes sensores.
Wu e Bai. (2001), apresentaram um estudo aplicado utilizando o controle ativo de ruído em avanço para atenuar o nível de pressão sonora gerado pela passagem das pás (BPF) de um ventilador centrifugo. O sistema de controle ativo de ruído proposto baseou-se no algoritmo FXLMS. Todo o sistema foi implementado utilizando um processador digital de sinais (DSP). Os resultados dos experimentos demonstraram a eficácia desta técnica em atenuar o ruído da BPF. O efeito do fluxo foi um dos fatores que influenciaram o desempenho
50
e a estabilidade do sistema de controle ativo de ruído. Desta maneira, a qualidade do sinal de referência foi degradada pelo ruído de turbulência. Para minimizar os efeitos da turbulência foi utilizado um microfone capacitivo inserido em um “probe tube”. Segundo os autores, os futuros trabalhos, visando aplicações práticas, deveriam focar o desenvolvimento de sistemas de controle adaptativos mais robustos. A partir destas considerações a função coerência entre os sensores é uma boa medida para garantir a observabilidade do sistema, tendo em vista a utilização de dispositivos de proteção dos sensores para minimizar os efeitos de turbulência.
Figura 5.2 – Método de montagem dos microfones para reduzir a turbulência do
escoamento.
5.1.2 Distância de Separação entre o Sensor de Referência e a Fonte de Cancelamento
O sistema de controle ativo de ruído em avanço requer um determinado período de tempo para receber a medição do sensor de referência, calcular um sinal de cancelamento apropriado e transformá-lo em som através da fonte secundária. Este período de tempo é referido como o atraso do sistema digital e eletro-acústico que compõem o sistema de controle ativo como um todo. Tipicamente, o tempo requerido para o sistema de controle receber o sinal de referência e disponibilizar uma saída de cancelamento está entre 5-10 milissegundos, considerando os problemas de propagação sonora em dutos industriais, (Snyder, 2000). Para que o sistema de controle ativo seja efetivo em atenuar sinais aleatórios e transitórios, o sistema de controle deve ser causal. Isto significa que a distância de separação entre a fonte de controle e a fonte principal deve ser suficiente para dar ao sistema de controle o tempo necessário para disponibilizar um sinal de cancelamento antes que o campo sonoro chegue à região da fonte secundária. Aproximadamente, o som propaga 1m a cada 3 milissegundos, assim se o sistema apresenta um atraso de 9 milissegundos a fonte de controle e o sensor de referência deverão estar separados no mínimo de 3m. Assim, uma margem de segurança deve ser acrescentada. A melhor distância de separação entre as fontes estaria em torno de 4m, (Snyder, 2000), estando a fonte principal à montante da fonte secundária. Caso o ruído seja periódico, o sistema de controle não será afetado pelos problemas de atraso dos sinais. Pois, como o sinal é periódico, mesmo que o sistema atue vários períodos de tempo depois do sinal proveniente da fonte principal ter alcançado o microfone de erro, o sistema de controle irá atenuar o ruído.
5.1.3 Características de Resposta do Duto
Normalmente, o sistema de controle ativo em dutos é mais efetivo quando apenas o modo de onda plana está presente, como descrito anteriormente no Capítulo 3.
51
Suponha que há um interesse em controlar o ruído no interior de um duto de um sistema de exaustão industrial, que tem vários metros de diâmetro, cujas freqüências de interesse vão até 200Hz. Porém, os cálculos dos modos do duto mostram uma freqüência de corte de 50Hz. O que fazer? Uma solução possível seria instalar divisores de parede rígida na seção do duto. Um divisor consiste numa ou mais partições localizadas no duto para transformar a sua seção em várias seções menores. As partições devem ser longas o suficiente para permitir o ajuste de todo o sistema de controle. Desta forma, é possível forçar o som a se propagar em um modo de onda plana em cada uma das seções do divisor.
Sendo assim, a análise dos modos acústicos no interior do duto principal permite a visualização prévia do comportamento da onda sonora que se propaga em seu interior, mostrando as regiões de maior concentração de energia acústica, sendo importante para auxiliar na melhor localização dos alto-falantes de cancelamento, como descrito no item anterior.
Neste trabalho foi utilizado o programa VirtualLab da LMS para análises 3D dos modos
acústicos e da propagação sonora no interior do duto principal. Este pacote trabalha com o método dos elementos de contorno (MEC) e com o método dos elementos finitos (MEF). Na análise teórica da propagação sonora no interior do duto principal foi utilizado o MEC. Para o estudo dos modos acústicos no interior do duto principal foi utilizado o MEF. O Capítulo 7 apresenta os resultados desta análise teórica, tendo em vista a modelagem 3D da planta experimental utilizada em laboratório, conforme estrutura apresentada no Apêndice D.
5.1.4 Análise da Velocidade de Volume Ótima Controlando a Densidade de Energia Potencial na Fonte de Cancelamento em um Duto Unidimensional
O objetivo desta análise é mostrar a conduta energética de um sistema de controle ativo de ruído aplicado em um duto unidimensional, sob a primeira freqüência crítica, quando a fonte secundária é conduzida pelo seu valor ótimo, controlando a densidade de energia potencial. Esta análise auxilia no posicionamento da fonte de controle no duto. De acordo com (Donadon (2002), Donadon et. al. (2003) e Donadon et. al. (2005)), a velocidade de volume ótima (QS) controlando a densidade de energia potencial na fonte de cancelamento vale:
)cos( S
PS xK
1QQ −= , 5.1
onde QP denota a velocidade de volume da fonte principal, K o número da onda e xS representa a distância relativa entre as fontes principal e secundária. A partir deste resultado podem ser observados dois aspectos importantes. Primeiramente, o resultado é independente da terminação do duto e da posição do sensor de erro, isso desde que o sensor de erro seja posicionado após as fontes. Segundo, a fonte secundária não pode controlar as freqüências onde,
( ) 2, 1,n ,2
1n2xK S K=−=π
5.2
ou, simplesmente,
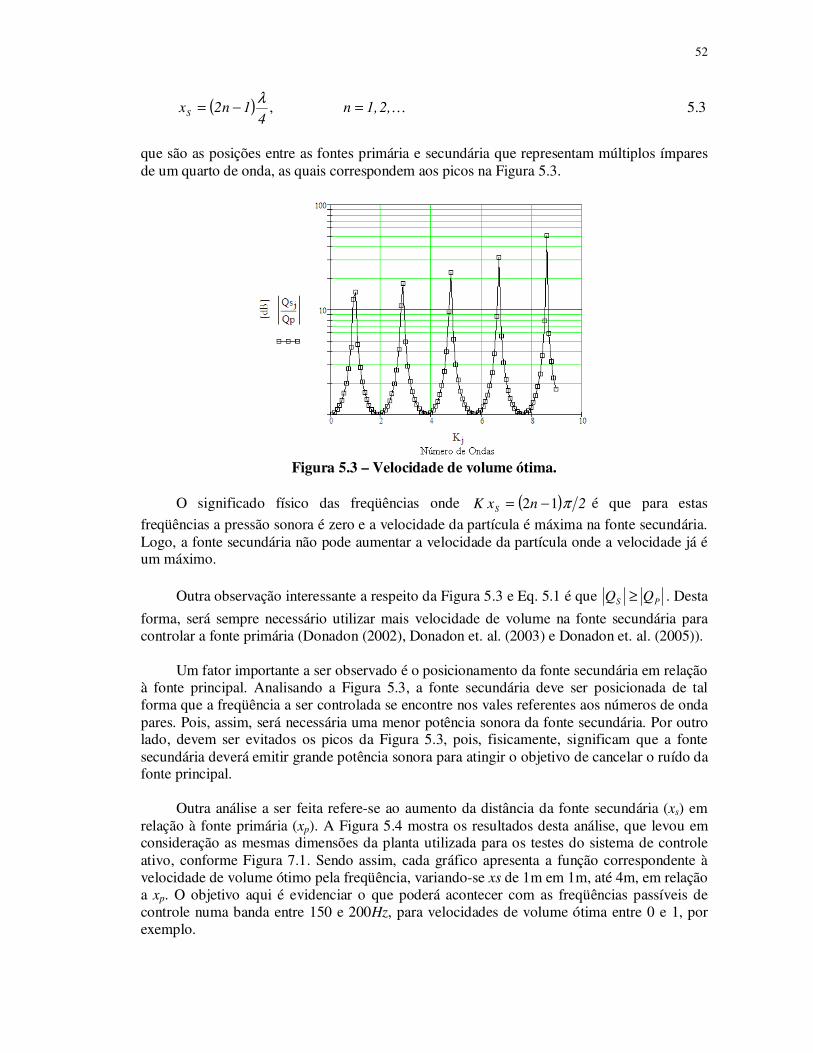
52
( ) K 2, 1,n 4
1n2xS =−= ,λ
5.3
que são as posições entre as fontes primária e secundária que representam múltiplos ímpares de um quarto de onda, as quais correspondem aos picos na Figura 5.3.
Figura 5.3 – Velocidade de volume ótima.
O significado físico das freqüências onde ( ) 2nxK S π12 −= é que para estas
freqüências a pressão sonora é zero e a velocidade da partícula é máxima na fonte secundária. Logo, a fonte secundária não pode aumentar a velocidade da partícula onde a velocidade já é um máximo. Outra observação interessante a respeito da Figura 5.3 e Eq. 5.1 é que PS QQ ≥ . Desta
forma, será sempre necessário utilizar mais velocidade de volume na fonte secundária para controlar a fonte primária (Donadon (2002), Donadon et. al. (2003) e Donadon et. al. (2005)). Um fator importante a ser observado é o posicionamento da fonte secundária em relação à fonte principal. Analisando a Figura 5.3, a fonte secundária deve ser posicionada de tal forma que a freqüência a ser controlada se encontre nos vales referentes aos números de onda pares. Pois, assim, será necessária uma menor potência sonora da fonte secundária. Por outro lado, devem ser evitados os picos da Figura 5.3, pois, fisicamente, significam que a fonte secundária deverá emitir grande potência sonora para atingir o objetivo de cancelar o ruído da fonte principal. Outra análise a ser feita refere-se ao aumento da distância da fonte secundária (xs) em relação à fonte primária (xp). A Figura 5.4 mostra os resultados desta análise, que levou em consideração as mesmas dimensões da planta utilizada para os testes do sistema de controle ativo, conforme Figura 7.1. Sendo assim, cada gráfico apresenta a função correspondente à velocidade de volume ótimo pela freqüência, variando-se xs de 1m em 1m, até 4m, em relação a xp. O objetivo aqui é evidenciar o que poderá acontecer com as freqüências passíveis de controle numa banda entre 150 e 200Hz, para velocidades de volume ótima entre 0 e 1, por exemplo.
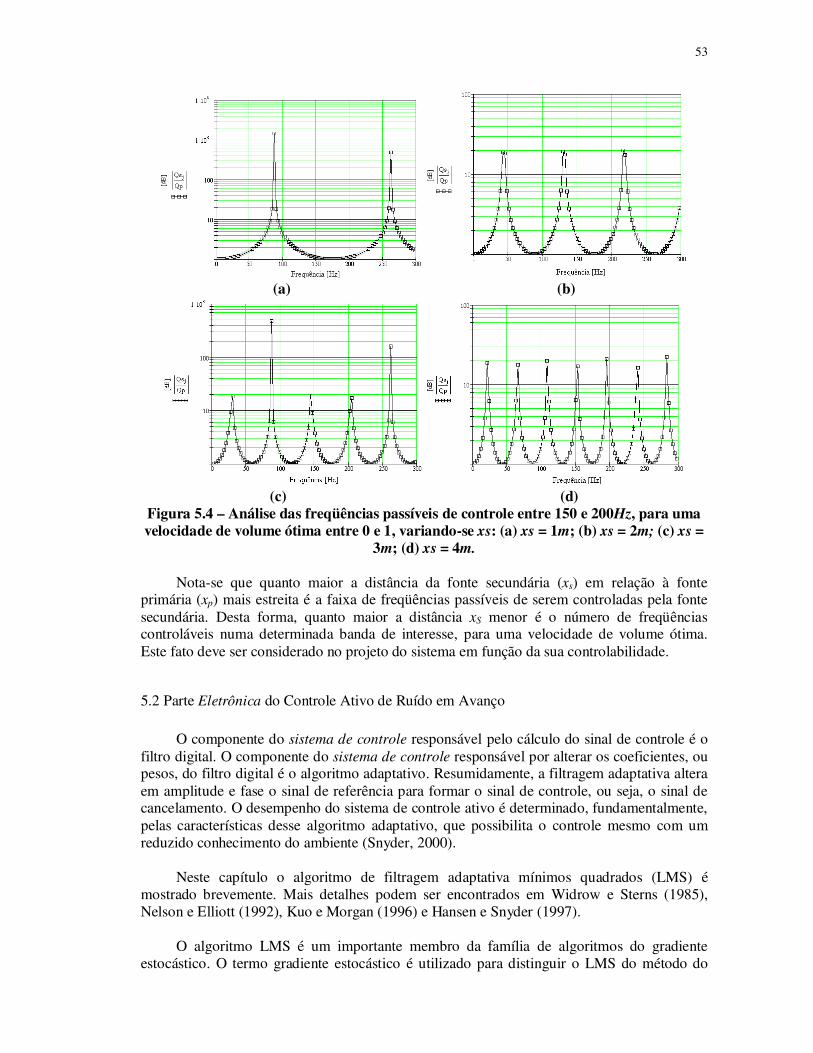
53
(a) (b)
(c) (d)
Figura 5.4 – Análise das freqüências passíveis de controle entre 150 e 200Hz, para uma velocidade de volume ótima entre 0 e 1, variando-se xs: (a) xs = 1m; (b) xs = 2m; (c) xs =
3m; (d) xs = 4m. Nota-se que quanto maior a distância da fonte secundária (xs) em relação à fonte primária (xp) mais estreita é a faixa de freqüências passíveis de serem controladas pela fonte secundária. Desta forma, quanto maior a distância xS menor é o número de freqüências controláveis numa determinada banda de interesse, para uma velocidade de volume ótima. Este fato deve ser considerado no projeto do sistema em função da sua controlabilidade.
5.2 Parte Eletrônica do Controle Ativo de Ruído em Avanço
O componente do sistema de controle responsável pelo cálculo do sinal de controle é o filtro digital. O componente do sistema de controle responsável por alterar os coeficientes, ou pesos, do filtro digital é o algoritmo adaptativo. Resumidamente, a filtragem adaptativa altera em amplitude e fase o sinal de referência para formar o sinal de controle, ou seja, o sinal de cancelamento. O desempenho do sistema de controle ativo é determinado, fundamentalmente, pelas características desse algoritmo adaptativo, que possibilita o controle mesmo com um reduzido conhecimento do ambiente (Snyder, 2000).
Neste capítulo o algoritmo de filtragem adaptativa mínimos quadrados (LMS) é mostrado brevemente. Mais detalhes podem ser encontrados em Widrow e Sterns (1985), Nelson e Elliott (1992), Kuo e Morgan (1996) e Hansen e Snyder (1997).
O algoritmo LMS é um importante membro da família de algoritmos do gradiente estocástico. O termo gradiente estocástico é utilizado para distinguir o LMS do método do

54
gradiente, que usa um gradiente determinístico em um cálculo recursivo do filtro de Wiener para entradas estocásticas (Haykin, 1996).
Um aspecto significativo do algoritmo LMS é sua simplicidade. Além disso, ele não
requer medições das funções de correlação pertinentes, nem requer a inversão de matriz. Na verdade, é a simplicidade do algoritmo LMS que o tornou um benchmark em relação a outros algoritmos de filtragem adaptativa (Haykin, 1996). 5.2.1 Introdução à Teoria de Filtragem Adaptativa O algoritmo de filtragem adaptativa LMS consiste de dois processos básicos:
1. Um processo de filtragem, o qual envolve o cálculo da saída de um filtro transversal produzida por um conjunto de coeficientes de entrada e a geração de um erro pela comparação desta saída pela resposta desejada.
2. Um processo adaptativo, o qual envolve o ajuste automático dos coeficientes do filtro de acordo com o erro.
Detalhes do filtro transversal, que é um exemplo de FIR (Resposta Finita ao Impulso),
usado no processo de filtragem, é mostrado na Figura 5.5. O vetor do sinal de referência, )n(x
r, e o vetor dos pesos, )n(w
r, são definidos como:
T1)]L-x(n 1)-x(n [x(n) (n)x += L
r 5.4
e
T1-L1 0 n w n wn[w nw )]()()()( L
r= 5.5
onde a resposta do filtro é dada como:
)()()()( nw(n)x nxnw ny T T rrrr== 5.6
Figura 5.5 – Diagrama de blocos de um filtro digital FIR.
Geralmente, a saída do sistema, y(n), é comparada com a resposta desejada, d(n), que resulta na seguinte diferença:
( )nxnwndnyndne T rr)()()()()( −=−= 5.7
Detalhes do processo adaptativo podem ser visto pela Figura 5.6:

55
Figura 5.6 – Diagrama de blocos de um filtro adaptativo.
5.2.2 O Erro Médio Quadrático
O processo adaptativo é orientado na direção de minimização do valor médio quadrático, ou da potência média do sinal de erro, [ ])(neE 2=ξ 5.8 onde [ ]E representa o valor esperado. Substituindo a Eq. 5.7 na Eq. 5.8, tem-se:
( )( )[ ]
( )( ) ( )( ) ( )( )[ ]nxnwnxnwnxnwnd2ndE
nxnwndETTT2
2T
rrrrrr
rr
)()()()()(
)()(
+−=
−=ξ 5.9
Assumindo que d(n) ),n(e e )n(x são estacionários estatisticamente, o erro médio quadrático pode ser convenientemente expresso como, [ ] )()()()( nwRnwnwp2ndE TT2 rrrr
+−=ξ 5.10 onde p
r denota um vetor coluna de correlação cruzada entre a resposta desejada e o vetor
entrada, definido como,
[ ]
[ ]Tdxdxdx 1Lr 1r 0r
nxndEp
)()()(
)()(
−=
=
L
rr
5.11
com ( )[ ]knxndEkrdx −= )()( 5.12
e R denota a matriz de autocorrelação e é dada como,
[ ]
−−
−
−
=
=
)()()(
)()()(
)()()(
)()(
0r2Lr1Lr
2Lr0r1r
1Lr1r0r
nxnxER
xxxxxx
xxxxxx
xxxxxx
T
L
MOLM
L
L
rr
5.13
e(n)
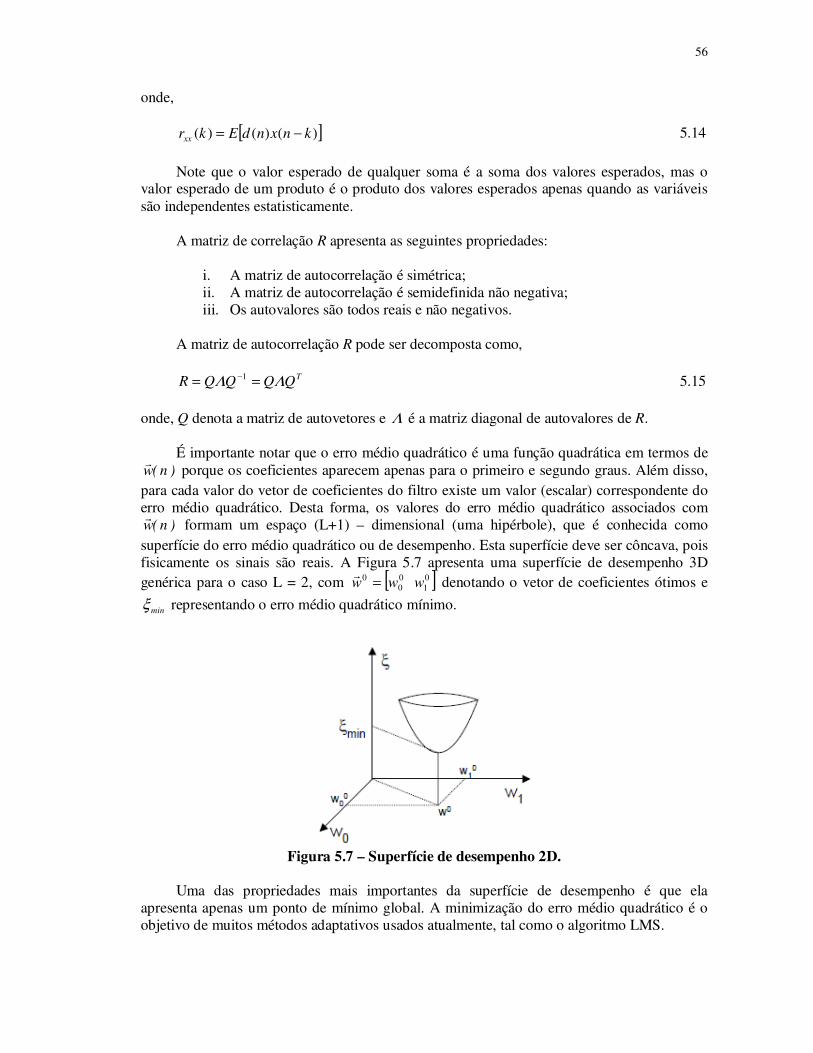
56
onde, [ ])()()( knxndEkrxx −= 5.14
Note que o valor esperado de qualquer soma é a soma dos valores esperados, mas o valor esperado de um produto é o produto dos valores esperados apenas quando as variáveis são independentes estatisticamente. A matriz de correlação R apresenta as seguintes propriedades:
i. A matriz de autocorrelação é simétrica; ii. A matriz de autocorrelação é semidefinida não negativa; iii. Os autovalores são todos reais e não negativos.
A matriz de autocorrelação R pode ser decomposta como,
TQQQQR ΛΛ == −1 5.15 onde, Q denota a matriz de autovetores e Λ é a matriz diagonal de autovalores de R. É importante notar que o erro médio quadrático é uma função quadrática em termos de
)n(wr
porque os coeficientes aparecem apenas para o primeiro e segundo graus. Além disso, para cada valor do vetor de coeficientes do filtro existe um valor (escalar) correspondente do erro médio quadrático. Desta forma, os valores do erro médio quadrático associados com
)n(wr
formam um espaço (L+1) – dimensional (uma hipérbole), que é conhecida como superfície do erro médio quadrático ou de desempenho. Esta superfície deve ser côncava, pois fisicamente os sinais são reais. A Figura 5.7 apresenta uma superfície de desempenho 3D genérica para o caso L = 2, com [ ]0
100
0 www =r
denotando o vetor de coeficientes ótimos e
minξ representando o erro médio quadrático mínimo.
Figura 5.7 – Superfície de desempenho 2D.
Uma das propriedades mais importantes da superfície de desempenho é que ela apresenta apenas um ponto de mínimo global. A minimização do erro médio quadrático é o objetivo de muitos métodos adaptativos usados atualmente, tal como o algoritmo LMS.

57
A solução ótima para o coeficiente do filtro que minimiza a função objetivo do erro médio quadrático é encontrada tomando o gradiente da Eq.5.10 e igualando a zero. O gradiente do erro médio quadrático é dado como:
)()()(
nwRnwRp2
w
w
w
nwT
1L
1
0
rrr
M
r ++−=
∂
∂
∂
∂∂
∂
=∂
∂=∇
−
ξ
ξ
ξ
ξξ 5.16
Como a matriz de correlação de entrada R é simétrica, e não singular, o vetor de coeficientes ótimo 0w
r, às vezes chamado de vetor peso de Wiener, é dado como,
pRw0nwR2p2w
10 rrrrr
−=⇒=+−=∂
∂=∇ )(
ξξ 5.17
O erro médio quadrático mínimo associado à solução ótima é obtido substituindo 0w
r na
Eq. 5.10,
[ ][ ][ ][ ][ ] 0T2
1T2
1T1T2
1T11T2
1T11T2
wpndE
pRpndE
pRppRp2ndE
pRRpRpRp2ndE
pRRpRpRp2ndE
rr
rr
rrrr
rrrr
rrrr
−=
−=
+−=
+−=
+−=
−
−−
−−−
−−−
)(
)(
)(
)()(
)()()(minξ
5.18
O erro médio quadrático pode ser expresso combinando minξ e 0w
r na Eq. 5.10,
resultando em,
)()())((
)()()()( min
nwRnwwnw2p
nwRnwnwp2wpnT0T
min
TT0T
rrrrr
rrrrrr
+−−=
+−+=
ξ
ξξ 5.19
Substituindo R)w(p TT 0rr
= na Eq. 5.19, tem-se:
)()(
))(())((
)()()()()()(
)()())(()()(
nvRnv
wnwRwnw
nwRnwnwRwnwRw2
nwRnwwnw2Rwn
Tmin
0T0min
T0T0T0min
T0T0min
rr
rrrr
rrrrrr
rrrrr
+=
−−+=
++−=
+−−=
ξ
ξ
ξ
ξξ
5.20
onde, 0wnwnv
rrr−= )()( 5.21
58
Como R é semidefinida positiva, a forma quadrática do lado direito da Eq. 5.20 indica que qualquer partida do vetor de coeficientes )n(w
r a partir do vetor ótimo 0w
r aumenta o erro
acima de seu valor mínimo, em outras palavras, causa um erro médio quadrático em excesso (excess mean-square error). 5.2.3 O Método do Gradiente O método do gradiente é uma técnica iterativa apropriada para se obter um algoritmo adaptativo, desde que a função relacionada ao erro com respeito aos pesos do filtro, wl, seja quadrática. Este método é utilizado em programação linear e em problemas de otimização para encontrar a solução que minimiza uma função objetivo. Geometricamente, é fácil verificar que correções sucessivas do vetor peso na direção do gradiente, sobre a superfície côncava de desempenho, permitem atingir o erro médio quadrático mínimo, minξ , onde os
componentes do vetor de pesos são ótimos (Kuo et.al., 1996). Assim, para cada vetor ( )nw
r sobre a superfície de desempenho corresponde apenas um
ponto, ( ) ( )],[ nnw ξ . Desta maneira, supondo um conjunto inicial de coeficientes do filtro,
( )0wr
, sobre a superfície de desempenho, o ponto ( ) ( )]0,0[ ξw é escolhido arbitrariamente. Para cada ponto é descrita uma derivada direcional, representando uma orientação específica para a superfície. A derivada direcional é dada por ( ) lwn ∂ξ∂ . Desta forma, o gradiente da
função erro com relação aos coeficientes, ( )nξ∇ , é definido como a derivada direcional. O conceito do método do gradiente pode ser implementado da seguinte forma:
( ) ( ) ( )n2
nw1nw ξµ
∇−=+rr
, 5.22
onde µ é um fator de convergência, ou tamanho do passo, que controla a estabilidade e a taxa de variação da convergência. O sinal negativo incrementa o vetor adaptativo dos pesos na direção negativa do gradiente. Entretanto, a equação acima é de difícil implementação em aplicações práticas, porque é necessário calcular a matriz de correlação de entrada R e o vetor de correlação cruzada de entrada p
r, presentes na formulação do gradiente, conforme Eq. 5.16.
5.2.4 O Algoritmo dos Mínimos Quadrados (LMS) A partir da Eq. 5.22 nota-se que o incremento a partir de ( )nw
r até ( )1+nw
r está na
direção negativa do gradiente. Assim, o rastreamento dos pesos seguirá aproximadamente um caminho descendente sobre a função objetivo. Entretanto, em muitas aplicações práticas as estatísticas dos sinais d(n) e x(n) são desconhecidas. Desta maneira, o método do passo descendente não pode ser utilizado diretamente. Em 1970, Widrow solucionou o problema utilizando o erro quadrático instantâneo, ( )ne2 , para estimar o erro médio quadrático dado por
( ) )]([ neEn 2≡ξ , onde E[ ] denota o valor esperado (Widrow, 1970). Assim, tem-se:
( ) ( )nen 2=ξ . 5.23

59
Desta maneira, o gradiente estimado, ( )nξ∇ , utilizado pelo algoritmo LMS é simplesmente o gradiente instantâneo de uma única amostra do erro quadrático:
( ) ( )[ ] ( )nene2n ∇=∇ξ . 5.24 Como ( ) ( ) ( ) ( )nxnwndne T rr
−= , o ( ) ( )nxner
−=∇ e o gradiente estimado torna-se (Kuo et. al., 1996):
( ) ( ) ( )nenxnˆ r2−=∇ξ . 5.25
Substituindo este gradiente estimado no algoritmo do gradiente, Eq. 5.22, tem-se:
( ) ( ) ( ) ( )nenxnw1nwrrr
µ+=+ . 5.26
Este algoritmo é conhecido como LMS ou algoritmo do gradiente estocástico. O valor esperado do vetor de pesos converge para a solução do filtro de Wiener desde que o passo µ seja escolhido apropriadamente (Kuo et. al., 1996). Assim, o algoritmo LMS é um dos mais utilizados para aplicações práticas.
O Apêndice A apresenta versões do algoritmo LMS clássico modificado, tendo em vista melhoramentos de convergência do algoritmo de controle e de estabilidade do sistema de controle ativo. É interessante notar que o valor esperado do gradiente estimado é o próprio gradiente do erro médio quadrático, ou seja, o gradiente esperado não apresenta um erro de tendência. Isto pode ser provado tomando o valor esperado de ambos os lados da Eq. 5.25, [ ] [ ])n(e)n(xE)n(ˆE
r2−=∇ξ 5.27
Substituindo o erro e assumindo que )n(x
r e )n(w
r são estatisticamente independentes,
[ ] [ ] [ ] [ ])()()()()()(ˆ nwEnxnxE2ndnxE2nE T rrrr−−=∇ξ 5.28
Substituindo p
re R ,
[ ] [ ] ξξ ∇=−−=−−=∇ 0wR2p2nwRE2p2nErrrr
)()(ˆ , 5.29 provando que o gradiente estimado é o gradiente. 5.2.4.1 Análise de desempenho A análise de convergência pode ser realizada tomando o valor esperado da Eq. 5.26, [ ] [ ] [ ])()()()( nenxEnwE1nwE
rrrµ+=+ 5.30
Substituindo o erro na equação acima,

60
[ ] [ ] [ ] [ ]))()()()()(()()( nwnxnxEndnxEnwE1nwE T rrrrrr++=+ µ 5.31
Assumindo que )n(x
r e )n(w
r são estatisticamente independentes e substituindo p
re R
na Eq. 5.31,
[ ] [ ] [ ][ ] p(n)wR)E-(I
nwREpnwE1nwErr
rrrr
µµ
µ
+=
−+=+ ))(()()( 5.32
Substituindo a solução ótima, Eq. 5.17, na Eq. 5.32,
[ ] [ ] 01 wR(n)wR)E-(I)n(wE
rrrµµ +=+ 5.33
O eixo de translação, definido pela Eq. 5.21, pode ser extrapolado para,
[ ] [ ][ ] [ ] 00
00
w1nwE1nvEw1nw1nv
wnwEnvEwnwnvrrrrrr
rrrrrr
−+=+⇒−+=+
−=⇒−=
)()()()(
)()()()( 5.34
Substituindo as equações acima na Eq. 5.33, [ ] [ ] 000 wRw(n)vR)(E-(Iw1nvE
rrrrrµµ ++=++ ))( 5.35
Rearranjando os termos, tem-se:
[ ] [ ]
[ ](n)vR)E-(I
wRIwwR(n)vR)E-(I1nvE 000
r
rrrrr
µ
µµµ
=
−+−+=+ )()( 5.36
Definindo um eixo de rotação como 'vQv
rr= , onde Q é a matriz de autovalores da
matriz R, e fazendo,
[ ] [ ][ ] [ ])()()()(
)()()()(''
''
1nvQE1nvE1nvQ1nv
nvQEnvEnQvnv
+=+⇒+=+
=⇒=rrrr
rrr
5.37
Substituindo a equação acima na Eq. 5.36, )]([)()]([ '' nvQERI1nvQE
rrµ−=+ . 5.38
Multiplicando por Q-1 e substituindo R por 1−QQΛ , como definido na Eq. 5.15,
)]([)()]([ '' nvQEQQIQ1nvQEQ 111 rr −−− −=+ Λµ . 5.39 Simplificando a equação acima,
)]([)(
)]([)
)]([)()]([
'
'
''
nvEI
nvEQQQQQ(Q
nvQEQQIQ1nvE111-
11
r
r
rr
Λµ
Λµ
Λµ
−=
−=
−=+−−
−−
5.40

61
A equação acima pode ser escrita da seguinte forma,
)](v)I()]n(v[E 'n' 0rr
Λµ−= 5.41 A condição de convergência diz que )(nw
r converge a partir de )(0w
r até 0w
r com
∞→n . É como dizer que 0=)]n(v[E 'r com ∞→n . Logo, n
nI )(lim Λµ−
∞→ deve ser zero, o
que significa que Λµ−I deve ser menor que 1. Como Λ é a matriz diagonal de autovalores
de R, a desigualdade é obedecida se, 11 <− maxµλ 5.42
onde, maxλ é o maior autovalor de R.
Logo, )(0w
r converge para 0w
r se o tamanho do passo é dado por,
maxλ
µ2
0 << 5.43
Como maxλ é menor que o traço de Λ e o traço de Λ é igual ao traço de R, a condição
acima pode ser interpretada da seguinte maneira,
][Rtr
20 << µ 5.44
O traço de R é a potência do sinal de entrada )n(x
r mais o comprimento L do filtro,
assim, tem-se:
entrada de sinaldo potencia1L
20
)( +<< µ 5.45
5.3 A Estratégia de Controle Ativo de Ruído em Avanço
A Figura 5.8 mostra um esquema teórico para controle ativo de ruído em avanço utilizando o algoritmo FXLMS. A utilização do algoritmo LMS supõe que o sinal de erro esteja diretamente disponível; esse é originado pela diferença entre a saída desejada de uma estrutura de filtro digital, que contém a dinâmica do caminho principal, e a saída do filtro adaptativo FIR. Neste esquema, x(n) denota um sinal de referência, P(z) representa a função de transferência do caminho primário, d(n) denota a saída de P(z), W(z) representa um filtro adaptativo atualizado pelo algoritmo LMS, y(n) denota a saída de W(z), S(z) representa o caminho secundário, y’(n) denota a saída de S(z), e(n) = d(n) – y’(n) representa o sinal de
erro, ( )zS é o filtro FIR não adaptativo a partir de uma identificação prévia do caminho secundário e, finalmente, x’(n) denota o sinal de referência filtrado utilizado pelo algoritmo FXLMS.
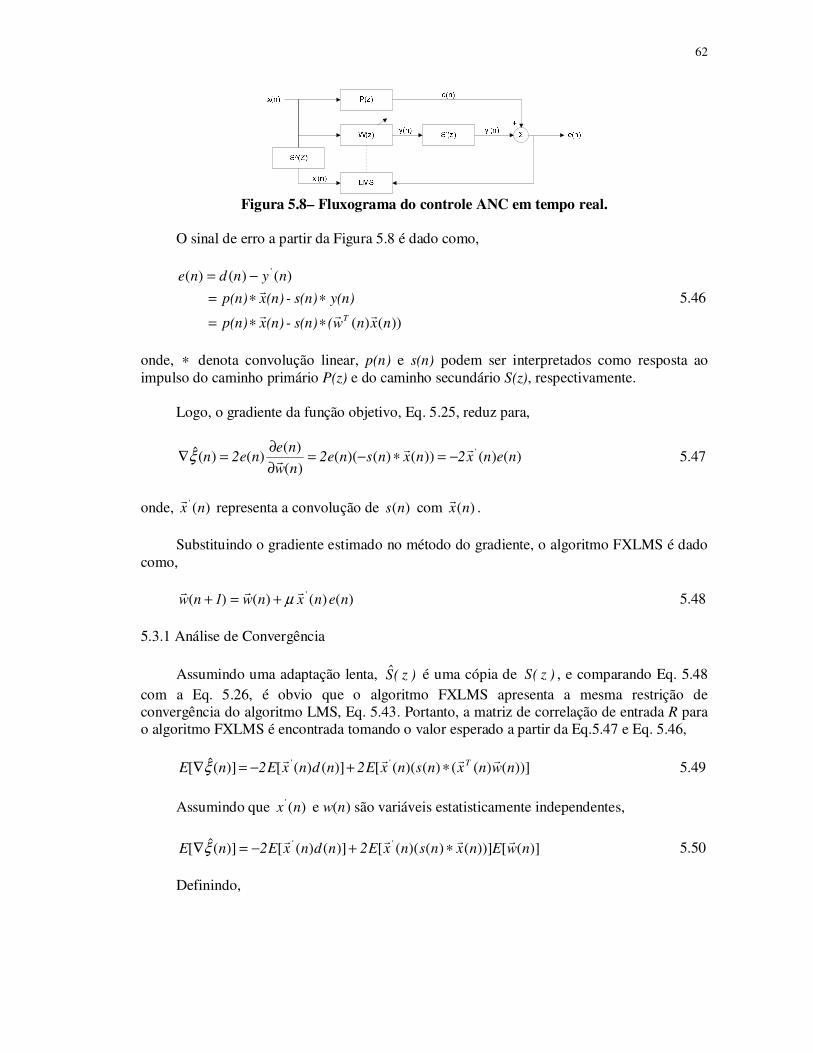
62
Figura 5.8– Fluxograma do controle ANC em tempo real.
O sinal de erro a partir da Figura 5.8 é dado como,
))()(
)()()( '
nxnw(s(n)-(n)xp(n)
y(n)s(n)-(n)xp(n)
nyndne
T rrr
r
∗∗=
∗∗=
−=
5.46
onde, ∗ denota convolução linear, p(n) e s(n) podem ser interpretados como resposta ao impulso do caminho primário P(z) e do caminho secundário S(z), respectivamente. Logo, o gradiente da função objetivo, Eq. 5.25, reduz para,
)()())()()(()(
)()()(ˆ ' nenx2nxnsne2
nw
nene2n
rrr −=∗−=
∂
∂=∇ξ 5.47
onde, )(' nx
r representa a convolução de )(ns com )(nx
r.
Substituindo o gradiente estimado no método do gradiente, o algoritmo FXLMS é dado como, )()()()( ' nenxnw1nw
rrrµ+=+ 5.48
5.3.1 Análise de Convergência Assumindo uma adaptação lenta, )z(S é uma cópia de )z(S , e comparando Eq. 5.48 com a Eq. 5.26, é obvio que o algoritmo FXLMS apresenta a mesma restrição de convergência do algoritmo LMS, Eq. 5.43. Portanto, a matriz de correlação de entrada R para o algoritmo FXLMS é encontrada tomando o valor esperado a partir da Eq.5.47 e Eq. 5.46,
))]()(()()(([)]()([)](ˆ[ '' nwnxnsnxE2ndnxE2nE T rrrr∗+−=∇ξ 5.49
Assumindo que )(' nx e w(n) são variáveis estatisticamente independentes, )]([))]()()(([)]()([)](ˆ[ '' nwEnxnsnxE2ndnxE2nE
rrrr∗+−=∇ξ 5.50
Definindo,
63
))]()())(()(ˆ[())]()()(([
)]()([
'
'
nxnsnxnsEnxnsnxER
ndnxEP
rrrr
r
∗∗=∗=
=
5.51
Tem-se: )(ˆ nRw2P2 +−=∇ξ 5.52 Esta é a mesma solução encontrada anteriormente, Eq. 5.17. Logo, o algoritmo FXLMS apresenta a mesma condição de convergência do algoritmo LMS, mas com a matriz de correlação de entrada definida pela Eq. 5.51. Alguns erros podem ocorrer se )(ˆ ns não representa s(n) na Eq.5.51, que significa que os autovalores de R podem assumir qualquer valor (com parte real e imaginária) e não são mais reais. Logo, a condição previamente estabelecida Λµ−I <1 é substituída por,
2
20
i
i
λ
λµ
ℜ<< 5.53
A condição estabelecida acima significa que o método não converge exponencialmente devido à parte imaginária do autovalor. Entretanto, se a parte real do autovalor é ainda positiva, o método converge, mas com uma longa constante de tempo, sendo necessário que a parte oscilatória do autovalor vá a zero, (Kuo e Morgan, 1996). Para demonstrar os efeitos da diferença entre )(ˆ ns e s(n), é introduzido um erro de fase φ e um erro de amplitude α em )(ˆ ns da seguinte maneira, φα ins1ns exp)()()(ˆ += 5.54
Substituindo a equação acima na Eq. 5.51, tem-se:
Ti
i
i
QQexp)(
))]n(x)n(s))(n(x)n(s[(Eexp)(
))]n(x)n(s))(n(x)n(s(exp)[(ER
Λα
α
α
φ
φ
φ
+=
∗∗+=
∗∗+=
1
1
1
5.55
onde, Q e Λ foram definidas anteriormente, Eq.5.15. Como os autovetores de R devem ter a parte real positiva para garantir a convergência, 0101 >+⇒>+ℜ φαα φ cos)(exp)( i 5.56 Logo, tomando o erro da amplitude igual a zero para simplificar a análise, o algoritmo FXLMS é estável se o erro de fase está dentro do seguinte intervalo: 00 9090 <<− φ .
64
É importante notar que o valor máximo do tamanho do passo µ é dependente da amplitude do autovalor, conforme Eq. 5.43. A Eq. 5.55 mostra que o erro de amplitude α afeta o valor máximo do tamanho do passo. A solução ótima para )(nw
r é encontrada assumindo ∞→n , 0nwE =)]([
r e 0wnw
rr→)( ,
logo, PRw0nE 10 −=⇒=∇
r)](ˆ[ ξ 5.57
Assumindo para R e P os valores instantâneos, tem-se:
)(
)(
))()()((
)()('
'
ns
np
nxnsnx
ndnxw0 =
∗= 5.58
A Eq. 5.58 mostra que a solução ótima é independente da diferença entre s(n) e )n(s . Portanto, o presente erro na estimativa do caminho secundário afeta apenas o tempo de convergência, mas não a solução ótima.
5.3.2 A Identificação Prévia do Caminho Secundário )(ˆ zS .
Tendo em vista a aplicação de um sistema de controle ativo de ruído em avanço é
fundamental realizar a identificação e a estimação de parâmetros relacionados ao caminho secundário ou eletro-acústico. Pois, o algoritmo em avanço requer, para seu funcionamento, o conhecimento da resposta do filtro S, que contém os atrasos do chamado caminho secundário ou eletroacústico, denominado )(ˆ zS . Assim, assumindo-se que as características de S sejam invariantes no tempo, é possível modelar tal resposta. Ao final do intervalo de treinamento, a estimação de S obtida ( S ) é incluída no sistema para a operação normal. Nesta primeira etapa, um ruído branco é utilizado como sinal de entrada na identificação de sistema, visto que ele é um sinal de faixa ampla e apresenta uma densidade espectral constante para todas as freqüências. Quando tal forma de onda é utilizada para a identificação de sistema, o tempo requerido para a medição pode ser relativamente pequeno em comparação com o tempo requerido para repetidas medições utilizando-se outras formas de onda.
A Figura 5.9 mostra um fluxograma para a identificação do caminho secundário de um
sistema de controle ativo em avanço.
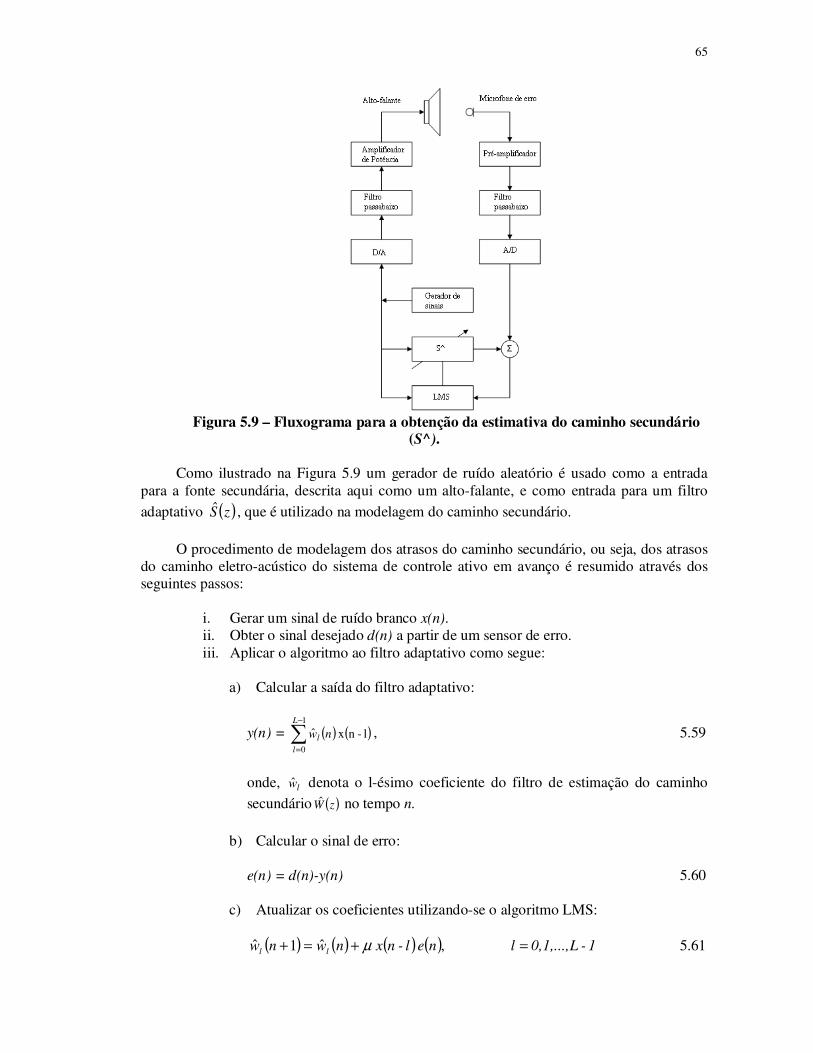
65
Figura 5.9 – Fluxograma para a obtenção da estimativa do caminho secundário
(S^).
Como ilustrado na Figura 5.9 um gerador de ruído aleatório é usado como a entrada para a fonte secundária, descrita aqui como um alto-falante, e como entrada para um filtro
adaptativo ( )zS , que é utilizado na modelagem do caminho secundário.
O procedimento de modelagem dos atrasos do caminho secundário, ou seja, dos atrasos do caminho eletro-acústico do sistema de controle ativo em avanço é resumido através dos seguintes passos:
i. Gerar um sinal de ruído branco x(n). ii. Obter o sinal desejado d(n) a partir de um sensor de erro. iii. Aplicar o algoritmo ao filtro adaptativo como segue:
a) Calcular a saída do filtro adaptativo:
y(n) = ( ) ( )∑−
=
1
0
l-n xˆL
ll nw , 5.59
onde, lw denota o l-ésimo coeficiente do filtro de estimação do caminho
secundário ( )zW no tempo n.
b) Calcular o sinal de erro: e(n) = d(n)-y(n) 5.60
c) Atualizar os coeficientes utilizando-se o algoritmo LMS:
( ) ( ) ( ) ( ) 1-L0,1,...,l ne l-nx nwnw ll =+=+ ,ˆ1ˆ µ 5.61
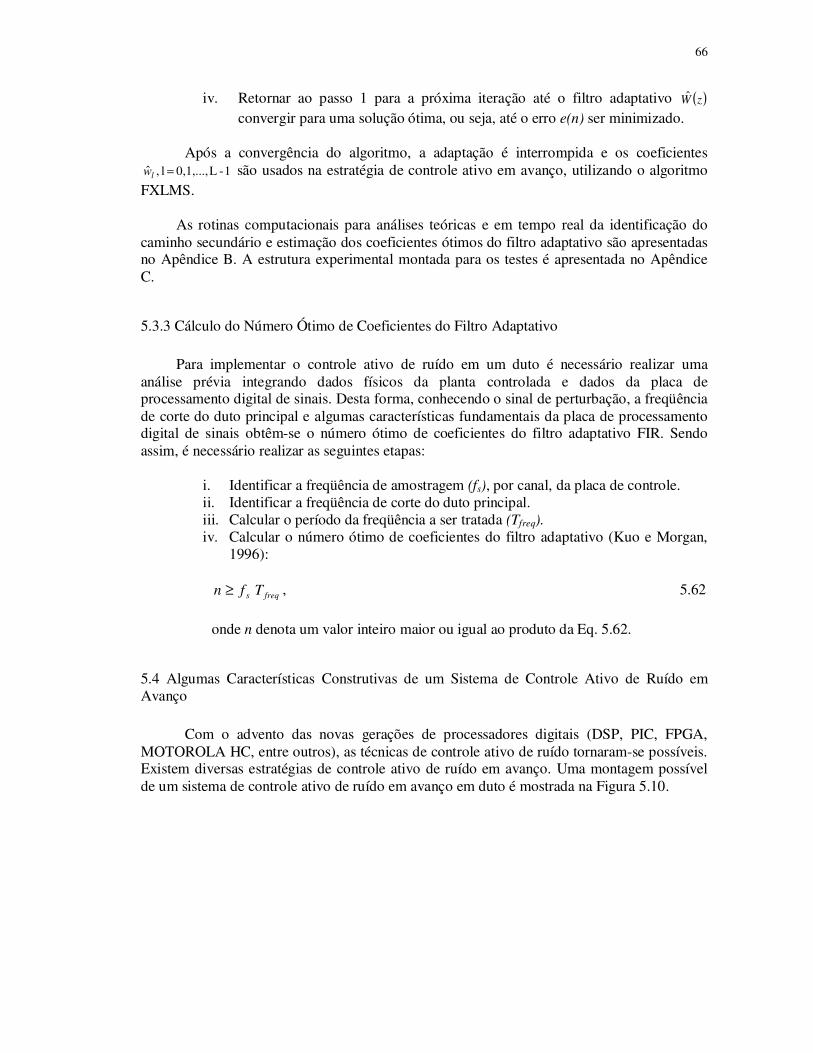
66
iv. Retornar ao passo 1 para a próxima iteração até o filtro adaptativo ( )zW convergir para uma solução ótima, ou seja, até o erro e(n) ser minimizado.
Após a convergência do algoritmo, a adaptação é interrompida e os coeficientes
1-L0,1,..., l ,ˆ =lw são usados na estratégia de controle ativo em avanço, utilizando o algoritmo FXLMS.
As rotinas computacionais para análises teóricas e em tempo real da identificação do caminho secundário e estimação dos coeficientes ótimos do filtro adaptativo são apresentadas no Apêndice B. A estrutura experimental montada para os testes é apresentada no Apêndice C.
5.3.3 Cálculo do Número Ótimo de Coeficientes do Filtro Adaptativo
Para implementar o controle ativo de ruído em um duto é necessário realizar uma
análise prévia integrando dados físicos da planta controlada e dados da placa de processamento digital de sinais. Desta forma, conhecendo o sinal de perturbação, a freqüência de corte do duto principal e algumas características fundamentais da placa de processamento digital de sinais obtêm-se o número ótimo de coeficientes do filtro adaptativo FIR. Sendo assim, é necessário realizar as seguintes etapas:
i. Identificar a freqüência de amostragem (fs), por canal, da placa de controle. ii. Identificar a freqüência de corte do duto principal. iii. Calcular o período da freqüência a ser tratada (Tfreq). iv. Calcular o número ótimo de coeficientes do filtro adaptativo (Kuo e Morgan,
1996): freqs Tfn ≥ , 5.62
onde n denota um valor inteiro maior ou igual ao produto da Eq. 5.62.
5.4 Algumas Características Construtivas de um Sistema de Controle Ativo de Ruído em Avanço
Com o advento das novas gerações de processadores digitais (DSP, PIC, FPGA,
MOTOROLA HC, entre outros), as técnicas de controle ativo de ruído tornaram-se possíveis. Existem diversas estratégias de controle ativo de ruído em avanço. Uma montagem possível de um sistema de controle ativo de ruído em avanço em duto é mostrada na Figura 5.10.
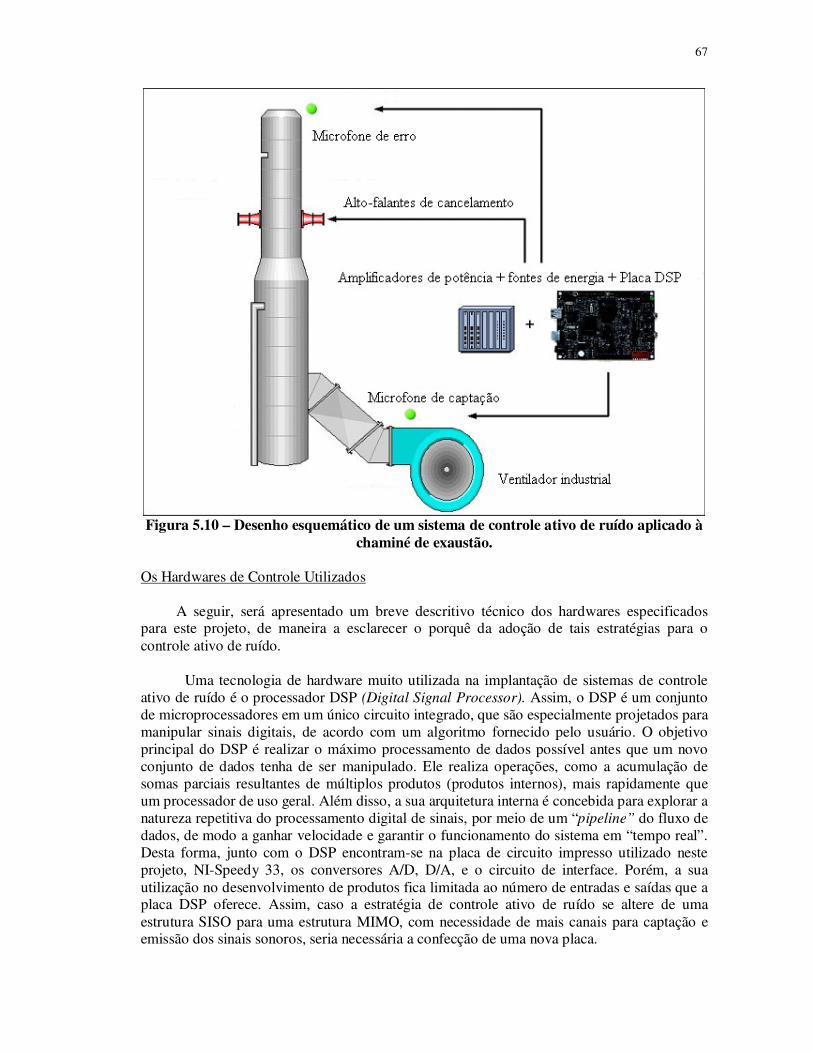
67
Figura 5.10 – Desenho esquemático de um sistema de controle ativo de ruído aplicado à
chaminé de exaustão. Os Hardwares de Controle Utilizados A seguir, será apresentado um breve descritivo técnico dos hardwares especificados para este projeto, de maneira a esclarecer o porquê da adoção de tais estratégias para o controle ativo de ruído.
Uma tecnologia de hardware muito utilizada na implantação de sistemas de controle
ativo de ruído é o processador DSP (Digital Signal Processor). Assim, o DSP é um conjunto de microprocessadores em um único circuito integrado, que são especialmente projetados para manipular sinais digitais, de acordo com um algoritmo fornecido pelo usuário. O objetivo principal do DSP é realizar o máximo processamento de dados possível antes que um novo conjunto de dados tenha de ser manipulado. Ele realiza operações, como a acumulação de somas parciais resultantes de múltiplos produtos (produtos internos), mais rapidamente que um processador de uso geral. Além disso, a sua arquitetura interna é concebida para explorar a natureza repetitiva do processamento digital de sinais, por meio de um “pipeline” do fluxo de dados, de modo a ganhar velocidade e garantir o funcionamento do sistema em “tempo real”. Desta forma, junto com o DSP encontram-se na placa de circuito impresso utilizado neste projeto, NI-Speedy 33, os conversores A/D, D/A, e o circuito de interface. Porém, a sua utilização no desenvolvimento de produtos fica limitada ao número de entradas e saídas que a placa DSP oferece. Assim, caso a estratégia de controle ativo de ruído se altere de uma estrutura SISO para uma estrutura MIMO, com necessidade de mais canais para captação e emissão dos sinais sonoros, seria necessária a confecção de uma nova placa.
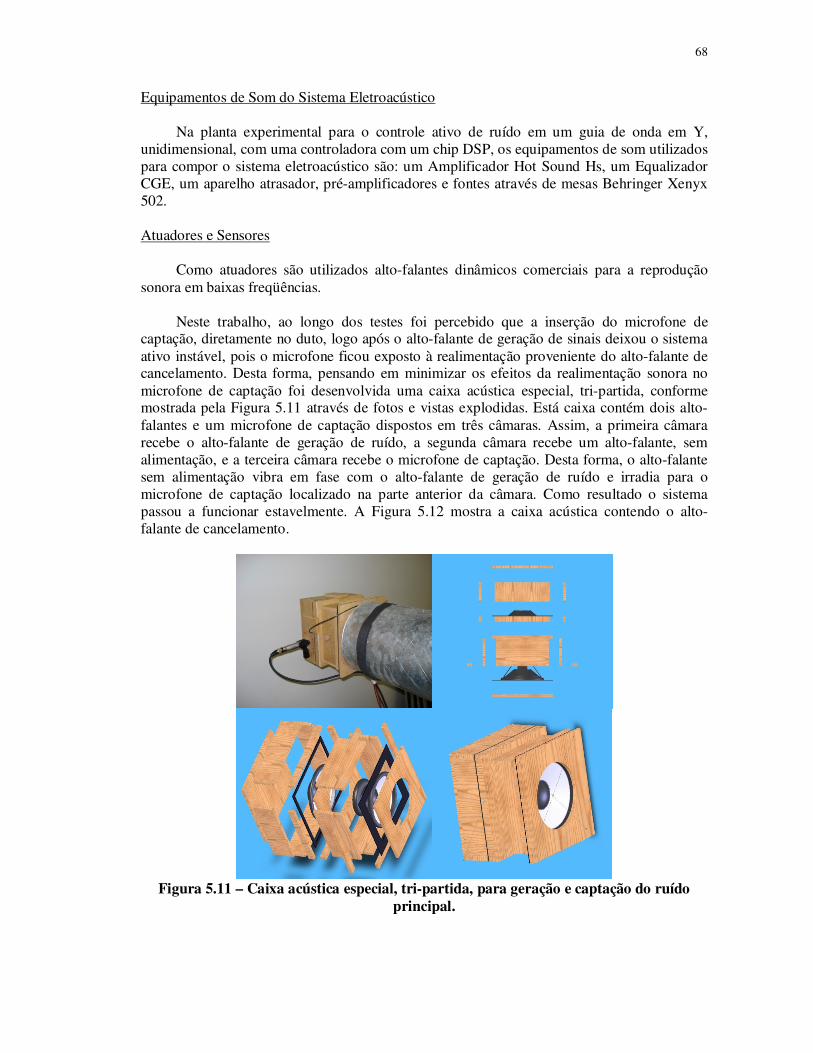
68
Equipamentos de Som do Sistema Eletroacústico Na planta experimental para o controle ativo de ruído em um guia de onda em Y, unidimensional, com uma controladora com um chip DSP, os equipamentos de som utilizados para compor o sistema eletroacústico são: um Amplificador Hot Sound Hs, um Equalizador CGE, um aparelho atrasador, pré-amplificadores e fontes através de mesas Behringer Xenyx 502. Atuadores e Sensores Como atuadores são utilizados alto-falantes dinâmicos comerciais para a reprodução sonora em baixas freqüências. Neste trabalho, ao longo dos testes foi percebido que a inserção do microfone de captação, diretamente no duto, logo após o alto-falante de geração de sinais deixou o sistema ativo instável, pois o microfone ficou exposto à realimentação proveniente do alto-falante de cancelamento. Desta forma, pensando em minimizar os efeitos da realimentação sonora no microfone de captação foi desenvolvida uma caixa acústica especial, tri-partida, conforme mostrada pela Figura 5.11 através de fotos e vistas explodidas. Está caixa contém dois alto-falantes e um microfone de captação dispostos em três câmaras. Assim, a primeira câmara recebe o alto-falante de geração de ruído, a segunda câmara recebe um alto-falante, sem alimentação, e a terceira câmara recebe o microfone de captação. Desta forma, o alto-falante sem alimentação vibra em fase com o alto-falante de geração de ruído e irradia para o microfone de captação localizado na parte anterior da câmara. Como resultado o sistema passou a funcionar estavelmente. A Figura 5.12 mostra a caixa acústica contendo o alto-falante de cancelamento.
Figura 5.11 – Caixa acústica especial, tri-partida, para geração e captação do ruído
principal.
69
Figura 5.12 – Caixa acústica para geração do ruído de cancelamento.
5.5 Características Gerais de um Sistema ANC em Avanço
• Atenua o ruído através do cancelamento sonoro; • Necessita de hardwares e softwares para o processamento digital do sinal a ser
tratado; • Com o avanço tecnológico os processadores digitais de sinais (DSP) tornaram-se
técnica e economicamente viáveis; • Requer um sistema de áudio robusto e com baixas distorções; • O componente principal de um sistema de controle ativo é o seu algoritmo de
controle; • O desempenho de tal sistema é determinado, fundamentalmente, pelas
características deste algoritmo; • Requer uma mão de obra especializada no desenvolvimento do seu projeto; • O custo do desenvolvimento do projeto de controle ativo é superior em relação ao
custo do desenvolvimento do projeto de controle passivo; • O custo com a movimentação de carga e instalação do controle ativo é inferior em
relação ao controle passivo; • No contexto global, o custo do controle ANC é inferior ao custo do controle
passivo em baixas freqüências mecânicas; • Há possibilidade do custo com o desenvolvimento do projeto do controle ANC
diminuir em 50% com a demanda; • Este sistema não causa perda de carga no sistema de exaustão a ser tratado; • Não impacta o consumo de energia elétrica do sistema de exaustão; • É uma tecnologia em desenvolvimento; • Não está totalmente dominada para aplicação em campo aberto; • Não é competitiva ainda para altas freqüências mecânicas.
70
6 PROJETO DE SISTEMAS HÍBRIDOS DE DESEMPENHO ÓTIMO
6.1 Procedimento de Projeto Ótimo Híbrido de Controle de Ruído: Ressonador de Helmholtz e Silenciador Resistivo
6.1.1 Procedimento Resumido:
Para implementar o projeto híbrido otimizado de um sistema de controle de ruído, foi
desenvolvido o seguinte procedimento resumido:
Fase 1 (Inicialização): para um sistema de exaustão, determine os parâmetros básicos para o projeto do sistema de controle.
Fase 2 (Projeto do sistema reativo): para atenuar as baixas freqüências é projetado o ressonador de Helmholtz.
Fase 3 (Projeto do sistema resistivo): para atenuar médias e altas freqüências é projetado um silenciador lamelar, a ser localizado em seqüência ao ressonador de Helmholtz.
Fase 4 (Projeto do sistema ativo): para atenuar baixas freqüências, para as quais somente o controle passivo não é suficiente para dissipar toda a energia acústica incidente, tendo em vista as restrições impostas, projete um sistema de controle ativo de ruído.
Fase 5 (Finalização): complemente o projeto do sistema de controle de ruído considerando aspectos práticos e detalhes construtivos.
6.1.2 Procedimento Detalhado:
Desenvolvimento da Fase 1: Inicialização.
Para desenvolver a Fase 1, considere a especificação dos seguintes parâmetros e passos preliminares:
Para a Identificação da Fonte de Ruído:
Opção 1 (fonte de ruído em operação): calcule os níveis de potência Sonora (NWS) através de medições em campo:
i. utilizando microfone(s) e aplicando um método de engenharia conforme a norma ISO 3744, gere uma malha de pontos de medição no entorno da fonte e defina uma área superficial de medição;
ii. utilizando uma sonda de intensidade sonora, para minimizar a influência de demais fontes sonoras, defina a área superficial de medição no entorno da fonte.
Opção 2 (fonte de ruído em fase de projeto): calcule os níveis de potência sonora
através de modelos matemáticos empíricos.

71
Para a caracterização do ventilador do sistema de exaustão, especifique:
iii. Tipo de ventilador. iv. Rotação (n). v. Número de pás do rotor (k).
vi. Incremento de pressão ( P∆ ). vii. Potência mecânica (W).
Para a caracterização do duto de exaustão, especifique:
viii. Geometria do duto de exaustão (Circular ou retangular).
ix. Dimensões internas: larguras ou diâmetro. x. Espessura da parede do duto (e).
xi. Comprimento disponível do duto (Ldisp).
Para a caracterização do escoamento, especifique:
xii. Temperatura de projeto (TP). xiii. Temperatura de operação (Top). xiv. Vazão volumétrica (Q). xv. Massa específica ( ρ ).
xvi. Massa molecular (M) ou a composição química dos gases de exaustão.
Para a caracterização das medições, especifique (apenas para o sistema em operação):
xvii. Temperatura ambiente (T0). xviii. Umidade relativa do ar (U%).
xix. Campo livre ou reverberante? xx. Velocidade do vento.
Desenvolvimento da Fase 2: Projeto Ótimo do ressonador de Helmholtz.
Para desenvolver a Fase 2, considere o seguinte algoritmo: Algoritmo para o ressonador de Helmholtz: Passo 0: (inicialização do algoritmo)
0a Determine a velocidade de propagação sonora [c (m/s)]. 0b Especifique a resistência acústica específica para uma malha de aço [Rmalha
(N s/m3)]. 0c Especifique o fator de ponderação baseado nas freqüências normalizadas,
indicados pelas normas e/ou legislações vigentes. 0d Especifique o nível crítico de ruído (NCR), a 1m da fonte sonora a ser
tratada. 0e Determine a freqüência de passagem das pás do ventilador:
60
knBPF = 6.1

72
0f Identifique os níveis de potência sonora irradiados pela fonte sonora [NWSj ( N,,1j K= )].
0g Identifique as baixas freqüências menores que 250Hz a serem tratadas [i0f
( M1i ,,K= )]. 0h Faça =i 1.
Passo 1: para a freqüência
i0f :
1a Defina as freqüências f1 e f2, em torno de
i0f , baseado nas freqüências
normalizadas (1/n oitava). 1b Defina a perda por transmissão admissível para o silenciador, PTadm (dB). 1c Calcule o fator de forma da curva de ressonância β (Barron, 2003), através
da seguinte equação:
20/10 admPT=β , 6.2
1d Calcule a resistência acústica requerida para o ressonador, RA [Pa-s/m3], através da equação:
( ) duto
0A S12
cR
−=
β
ρ, 6.3
onde, Sduto denota a seção transversal do duto principal, 0ρ a massa especifica do fluido e c a velocidade de propagação do som no escoamento.
1e Calcule o fator de qualidade acústica, QA (adimensional), através da
seguinte equação:
( ) ( )122
12
0A
ff2
fQ
−−=
β
β 6.4
1f Calcule a massa acústica no pescoço do ressonador, MA [kg/m4], através da
seguinte equação:
0
AAA f2
RQM
π= 6.5
1g Calcule a complacência acústica relacionada ao volume da câmara e à massa
acústica CA [m3/Pa], através da seguinte equação:
A2
02A
Mf4
1C
π= 6.6
1h Calcule o volume da câmara do ressonador, V [m3], através da seguinte
equação:

73
20A cCV ρ= 6.7
1i Calcule a resistência acústica específica adicional, proporcionada pelas telas
metálicas (se forem utilizadas telas metálicas), (Barron, 2003):
furos
2telatela
ANa
RNR
π∆ = , 6.8
onde, Ntela representa o número de camadas de telas metálicas, a raio do orifício e Nfuros o número de orifícios.
1j Calcule a resistência global do ressonador pela equação:
AAdisp RRR ∆+= , 6.9
onde 0RA =∆ se não forem utilizadas telas metálicas.
1k Calcule o raio ótimo do orifício, através da seguinte equação:
−= e
R
RM
16
3r
A
dispAfuros
π 6.10
1l Calcule o número de orifícios, através da seguinte equação:
A2furo
disp
furosRr
RN
π= 6.11
1m Para a freqüência de ressonância
i0f , calcule o desempenho do ressonador
para todas as freqüências a serem atenuadas, através da seguinte equação:
( ) ( )[ ]( ) ( )[ ] ][
//1
//log10 2
0002
20000
22
, dBffffQ
ffffQPT
jij
ji
oiA
ijA
ji
−+
−+=
β
, .N,,1j K= 6.12 Passo 2: Atualize o nível de potência Sonora remanescente: PTNWSNWS j,iinicialfinal ij
−← [dB] , N,,1j K= 6.13
Passo 3: Se Ni = , vá para o Passo 4, por outro lado faça 1ii += e retorne ao Passo 1. Passo 4: Calcule o nível de pressão sonora remanescente a 1m da saída da seção do dispositivo de controle de ruído (para campo livre na presença de piso), (Bistafa, 2006):
74
( ) 114
log10DIrlog20NWS),r(NPSjj finalrem −
−+−=
π
Ωθ θ [dB]
, N,,1j K= 6.14
onde, r denota a distância entre a fonte de ruído e o receptor, θDI denota a
diretividade de propagação da fonte Sonora, πΩ 2= se o receptor está próximo ao piso, ou πΩ 4= se o receptor encontra-se em campo livre.
Passo 5: Calcule o
jremNPS , A – ponderado.
Passo 6: Calcule o globalNPS [dBA] utilizando
jremNPS [dBA].
Passo 7: Compare o NPSglobal [dBA] com o NCR [dBA]. Se o NCRNPS global ≤ , então finalize
o projeto, por outro lado inicie o projeto do silenciador resistivo. Desenvolvimento da Fase 3: Projeto Ótimo do Silenciador Resistivo.
Para desenvolver a Fase 3, considere o seguinte algoritmo: Algoritmo para o Silenciador Resistivo: Passo 8: (inicialização)
8a Identifique o nível de potência sonora irradiado, jremNWS ( N,,1j K= ).
8b Identifique as freqüências maiores que 250Hz a serem tratadas, jf
( N,,1j K= ). 8c Defina o material absorvente e os respectivos coeficientes de absorção
(Bistafa, 2006). 8d Exclua as freqüências cujos coeficientes de absorção são iguais a zero
(freqüências não tratadas). 8e Faça =j 1. 8f Defina o número inicial de lamelas.
Passo 9: para obter um projeto ótimo:
9a Calcule os parâmetros termodinâmicos e aerodinâmicos do escoamento. 9b Defina a velocidade de escoamento máxima (Vmax) na seção livre do silenciador como 20 m/s (Bistafa, 2006). 9c Defina a vazão volumétrica QV (m3/s). 9d Calcule a área interna livre da seção do silenciador resistivo, através da seguinte equação:
V
QA
max
Vint = [m2] 6.15
9e Calcule perímetro absorvente (Pint) conforme a geometria corrente. 9f Calcule o comprimento disponível máximo para o silenciador resistivo:

75
reatdisp LLL −=max 6.16
9g Encontre o comprimento máximo do silenciador resistivo, Lresist, tal que:
maxLLotimo ≤ 6.17
e NCLNPS global ≤ 6.18
onde,
( )
][10log1010
dBANPS
jjrem ALNPS
global
= ∑
−
Nj ,,1K= 6.19
onde Aj representa o fator de ponderação A e
( ) 114
log10log20)()( −
Ω−+−−=
πθDIrLPTNWSLNPS jremrem jj
[dB]
Nj ,,1 K= 6.20
onde,
( ) ][05,1int
int4,1 dBA
PLLPT jj α= Nj ,,1 K= 6.21
Passo 10: Cheque o nível de pressão sonora global a 1m do tratamento (NPSglobal). Se
NCRNPSglobal ≤ , o controle passivo é suficiente para atenuar o ruído. Então vá para o
Passo11. Caso contrário retorne ao Passo 8 e reveja o material aplicado (coeficiente de absorção x espessura x densidade) e o número de lamelas. Passo 11: Se maxLLotimo < , o controle passivo é suficiente para tratar o ruído. Então vá para a
Fase 5 para finalizar o projeto híbrido. Caso contrário, melhore o desempenho do tratamento utilizando um sistema de controle ativo. Para o desenvolvimento deste sistema siga os seguintes passos (Papini e Pinto, 2007) e (Papini, Pinto e Morais, 2008), com outras bibliografias se necessário, bem como os fundamentos teóricos e práticos do Capítulo 5. Vá para a Fase 4. Desenvolvimento da Fase 4: Projeto Ótimo de um Sistema de Controle Ativo de Ruído. Passo 12: Implemente o algoritmo de controle para compilação numa placa DSP. Passo 13: Defina a freqüência de corte do duto principal, ou seja, freqüência crítica:

76
Opção 1: em um duto reto, de seção transversal retangular (a x b), a freqüência de corte é dada por:
a2
cf c = para a > b 6.22
Opção 2: em um duto reto, de seção transversal circular, a mais baixa freqüência
de corte é dada por:
dutoc r2
c5861,0f = 6.23
OBS.:
i. se necessário, instalar divisores na seção transversal do duto
principal até garantir a condição de onda plana para a freqüência de interesse, conforme descrito no item 5.1.4.
ii. a partir do item a defina a quantidade de alto-falantes de cancelamento e o número de canais da placa DSP, tendo em vista o número de divisores de parede rígida necessários para garantir onda plana em cada seção.
Passo 14: Defina a distância mínima entre o microfone de captação e o(s) alto-falante(s) de cancelamento independentemente do tipo de sinal:
14a Identifique a freqüência de amostragem (fs), por canal, da placa de controle. 14b Identifique a freqüência a ser tratada e calcule o seu período (Tfreq). 14c Calcule a velocidade de propagação sonora no meio fluido. 14d Defina a ordem do filtro adaptativo como (Kuo e Morgan, 1996): freqs Tfn ≥ 6.24
14e Calcule a distância mínima entre o microfone de captação e o alto-falante de
cancelamento como (Kuo e Morgan, 1996):
s
min f
cnd = 6.25
onde, c denota a velocidade de propagação sonora. Passo 15: Caso o ruído não seja periódico ou apresente transitórios constantemente, defina a posição da fonte secundária (xS), respeitando o Passo 14 e siga para o Passo 17. Caso o ruído seja periódico e não apresente variações de freqüência vá para o Passo 16. Passo 16: Faça uma análise teórica e experimental da velocidade de volume ótima, controlando a densidade de energia potencial na fonte de cancelamento (QS) e defina as

77
distância ótima entre as fontes primária e secundária (xS), conforme descrito no item 5.1.4 e mostrado experimentalmente no item 7.4. Passo 17: Identifique o caminho secundário (sistema eletroacústico) e estime os coeficientes ótimos do filtro adaptativo FIR, em tempo real. Passo 18: Verifique o desempenho da estratégia de controle ativo de ruído através da realização de testes experimentais. Analise a causalidade, a observabilidade e a controlabilidade do sistema e, se necessário, retorne ao Passo 12. Desenvolvimento da Fase 5: Finalização. Passo 19: Complemente o projeto do sistema de controle de ruído considerando aspectos econômicos e práticos, detalhes construtivos ou especificações do problema. A Figura 6.1 mostra um fluxograma deste procedimento.
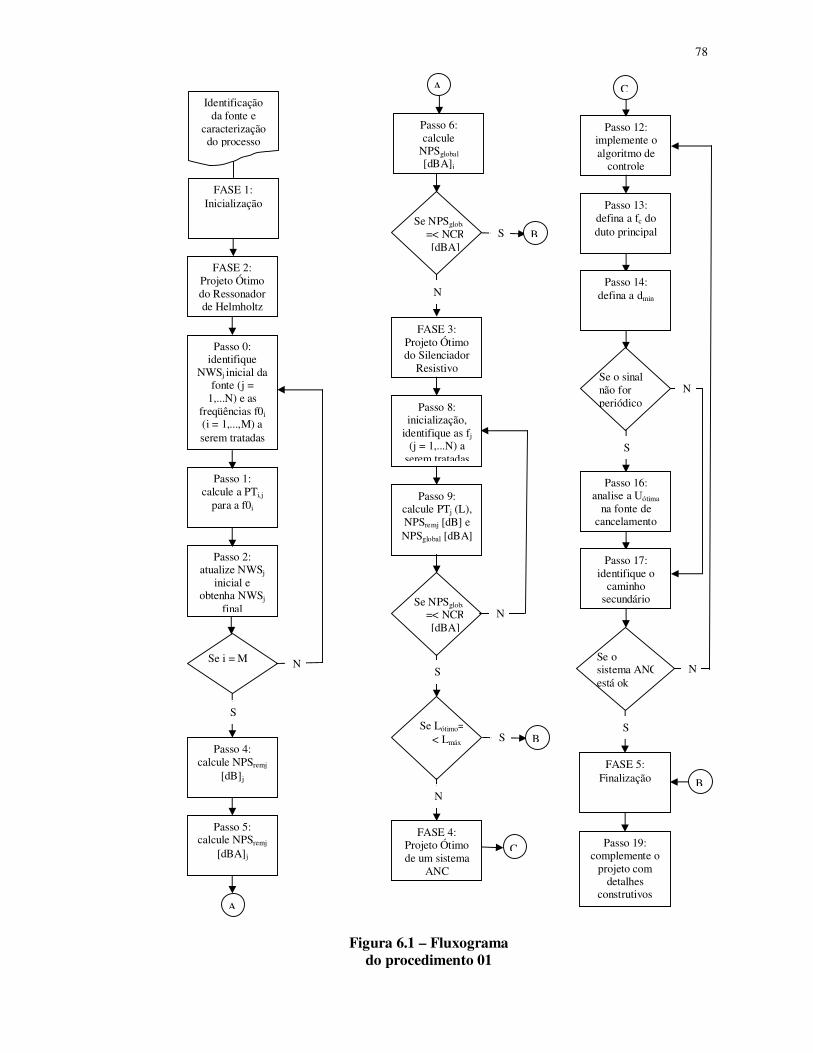
78
Figura 6.1 – Fluxograma
do procedimento 01
Identificação da fonte e
caracterização do processo
FASE 1: Inicialização
FASE 2: Projeto Ótimo do Ressonador de Helmholtz
Passo 0: identifique
NWSj inicial da fonte (j =
1,...N) e as freqüências f0i (i = 1,...,M) a serem tratadas
Passo 1: calcule a PTi,j
para a f0i
Passo 2: atualize NWSj
inicial e obtenha NWSj
final
Passo 4: calcule NPSremj
[dB]j
FASE 3: Projeto Ótimo do Silenciador
Resistivo
Passo 8: inicialização,
identifique as fj (j = 1,...N) a
serem tratadas
Se i = M N
Se NPSglobal
=< NCR[dBA]
A
S
N
S
Passo 5: calcule NPSremj
[dBA]j
Passo 6: calcule
NPSglobal
[dBA]j
A
Passo 9: calcule PTj (L), NPSremj [dB] e NPSglobal [dBA]
Se NPSglobal
=< NCR[dBA]
S
N
Se Lótimo=< < Lmáx
N
S
FASE 4: Projeto Ótimo de um sistema
ANC
C
Passo 12: implemente o algoritmo de
controle
Passo 13: defina a fc do duto principal
Se o sinal não for periódico
S
Passo 14: defina a dmin
Passo 16: analise a Uótima
na fonte de cancelamento
Passo 17: identifique o
caminho secundário
N
B
B
Se o sistema ANCestá ok
S
N
FASE 5: Finalização
Passo 19: complemente o
projeto com detalhes
construtivos
B
C
79
6.2 Procedimento de Projeto Ótimo Híbrido de Controle de Ruído: Câmara de Expansão Simples ou Dupla com Absorção Sonora.
6.2.1 Procedimento Resumido:
Para implementar o projeto híbrido otimizado de um sistema de controle de ruído, foi
desenvolvido o seguinte procedimento resumido:
Fase 1 (Inicialização): para um sistema de exaustão, determine os parâmetros básicos para o projeto do sistema de controle.
Fase 2 (Projeto do sistema reativo): para a atenuação sonora é projetada a câmara de expansão simples ou dupla conectada por duto interno.
Fase 3 (Finalização): complemente o projeto do sistema de controle de ruído considerando aspectos práticos e detalhes construtivos.
6.2.2 Procedimento Detalhado:
Desenvolvimento da Fase 1: Inicialização.
Para desenvolver a Fase 1, considere a especificação dos seguintes parâmetros e passos preliminares:
Para a Identificação da Fonte de Ruído:
Opção 1 (fonte de ruído em operação): calcule os níveis de potência Sonora (NWS) através de medições em campo:
i. utilizando microfone e aplicando um método de engenharia conforme a norma ISO 3744, gere uma malha de pontos de medição no entorno da fonte e defina uma área superficial de medição;
ii. utilizando uma sonda de intensidade sonora, para minimizar a influência de demais fontes, defina a área superficial de medição no entorno da fonte.
Opção 2 (fonte de ruído em fase de projeto): calcule os níveis de potência sonora
através de modelos matemáticos empíricos.
Para a caracterização do motor estacionário, especifique:
iii. Potência mecânica (W). iv. Com ou sem turbo compressor.
Para a caracterização do duto de exaustão, especifique:
v. Geometria do duto de exaustão (Circular ou retangular). vi. Dimensões internas: larguras ou diâmetro. vii. Espessura da parede do duto (e). viii. Comprimento disponível do duto (Ldisp).
80
Para a caracterização do escoamento, especifique:
ix. Temperatura de projeto (TP). x. Temperatura de operação (Top). xi. Vazão volumétrica (Q). xii. Massa específica ( ρ ). xiii. Massa molecular (M) ou a composição química dos gases de exaustão.
Para o cálculo da massa molecular deve-se considerar o monóxido de carbono. Deve-se realizar um cálculo estequiométrico.
Para a caracterização das medições, especifique (apenas para o sistema em operação):
xiv. Temperatura ambiente (T0). xv. Umidade relativa do ar (U%). xvi. Campo livre ou reverberante? xvii. Velocidade do vento.
Desenvolvimento da Fase 2: Projeto Ótimo da Câmara de Expansão.
Para desenvolver a Fase 2, considere o seguinte algoritmo: Algoritmo para a câmara de expansão: Passo 0: (inicialização do algoritmo)
0a Determine a velocidade de propagação sonora [c (m/s)]. 0b Especifique o fator de ponderação baseado nas freqüências normalizadas,
indicados pelas normas e/ou legislações vigentes. 0c Especifique o nível crítico de ruído (NCR), a 1m da fonte sonora a ser
tratada. 0d Identifique os níveis de potência sonora irradiados pela fonte sonora
[NWSj ( N,,1j K= )]. 0e Identifique as freqüências a serem tratadas [
if 0 ( M,,1i K= )].
0f Faça =i 1. Passo 1: para a freqüência
i0f :
1a Defina as freqüências f1 e f2, em torno de
i0f , baseado nas freqüências
normalizadas (1/n oitava). 1b Determine a perda por transmissão de projeto (PTprojeto) para 1f .
1c Estime o valor n substituindo a seguinte condição π2
112 ≈− camaracamara LkLk
na Eq. 4.89, garantindo a condição de PTmax para i
f0 . Assim, tem-se:
( )12
0
22
1
ff
fn
−+≈ 6.26

81
1d Por exemplo, a partir da Eq. 6.26, se n = 1,25 use n1 = 1 ou n2 = 2. 1e Cheque as duas possibilidades de n. Inicie pelo maior valor de n. 1f Calcule o comprimento ótimo do silenciador através da Eq. 4.93:
[m] f2
c2
1-n
L0
2
camara
= 6.27
1g Calcule para a menor freqüência (f1) kLcamara, como:
camaracamara Lc
fkL 12π
= 6.28
1h Se camarakL for igual a π ou múltiplos inteiros de π , descarte a primeira
opção de n, pois a condição de perda por transmissão mínima é atendida e a PT= 0, conforme Eq.4.96 para o caso especial ν=1.
1i Retorne ao Passo 1e repita para n1. Substitua n2 na Eq. 6.27 por n1 e calcule um novo kLcamara.
1j Encontre o recíproco do coeficiente de transmissão da potência sonora para a freqüência f1 como:
10101 projetoPT
t
=α
6.29
1k Iguale as Eqs. 6.29 e 4.88 e calcule m.
1l Faça 2
1
2
1
2
==
D
D
S
Sm , conforme Eq. 4.85, e encontre o diâmetro interno
ótimo da câmara de expansão simples (D2). 1m Calcule a perda por transmissão máxima para
if0 , conforme Eq.4.92, para o
caso especial de ν = 1. Assim, tem-se:
][)1
log(10 maxmax dBPTtα
= 6.30
1n Para a freqüência de ressonância
if0 , calcule o desempenho do ressonador
para todas as freqüências a serem atenuadas, através da seguinte equação:
][(1
4
11log10 2
2
, dBLksenm
mPT camarajji
−+=
, .,,1 Nj K= 6.31

82
Passo 2: Atualize o nível de potência Sonora remanescente: PTNWSNWS j,iinicialfinal ij
−← [dB] , Nj ,,1K= 6.32
Passo 3: Se Mi = , vá para o Passo 4, por outro lado faça 1ii += e retorne ao Passo 1. Passo 4: Calcule o nível de pressão sonora remanescente a 1m da saída da seção do dispositivo de controle de ruído (para campo livre na presença de piso), (Bistafa, 2006):
( ) 114
log10DIrlog20NWS),r(NPSjj finalrem −
−+−=
π
Ωθ θ [dB]
, Nj ,,1K= 6.33 onde, r denota a distância entre a fonte de ruído e o receptor, θDI denota a diretividade de
propagação da fonte Sonora, πΩ 2= se o receptor está próximo ao piso, ou πΩ 4= se o receptor encontra-se em campo livre. Passo 5: Calcule o
jremNPS , A – ponderado.
Passo 6: Calcule o globalNPS [dBA] utilizando
jremNPS [dBA].
Passo 7: Cheque o nível de pressão sonora global a 1m do tratamento (NPSglobal). Se
NCRNPS global ≤ , vá para o Passo 8. Caso contrário, insira absorção sonora na parede interna
da câmara e calcule a perda por transmissão utilizando a fórmula empírica de Sabine para todas as freqüências
if0 . Volte ao Passo 2 e repita até o Passo 8.
Passo 8: Se maxcamara LL < , o controle passivo é suficiente para tratar o ruído. Então vá para a
Fase 3 para finalizar o projeto híbrido. Por outro lado, vá para o Passo 9. Passo 9: A partir das dimensões da câmara de expansão simples, dimensione uma câmara de expansão dupla interligada por um duto. Sendo assim, defina o comprimento do duto interno de conexão como:
2
camaraduto
LL = 6.34
Passo 10: Calcule o número de onda ki como:
c
fk i
i02 π
=
Ni ,,1 K= 6.35
Passo 11: Calcule a freqüência de corte do silenciador através da seguinte equação:
2
10
32
−+
=
dutocamaracamaracamaraduto
c
LLLLLm
cf
π
6.36
83
Se a freqüência de corte, que representa a primeira freqüência da faixa de operação do silenciador estiver abaixo da primeira freqüência de interesse
i0f , então vá para o Passo 12.
Caso contrário, retorne ao Passo 1 e redimensione a câmara de expansão. Passo 12: Para a freqüência de ressonância
if0 , calcule o desempenho do ressonador para
todas as freqüências a serem atenuadas, através da seguinte equação:
( ) ][log10 22
11, dBGGPT ji +=
, .,,1 Nj K= 6.37 Volte ao Passo 2 e repita até o Passo 8. Se as restrições forem atendidas, então finalize o projeto e vá para a Fase 3. Por outro lado, insira absorção sonora na parede interna das câmaras e calcule a perda por transmissão utilizando a fórmula empírica de Sabine para todas as freqüências
if0 . Volte ao Passo 2 e vá até o Passo 8. Se as restrições forem atendidas, então
finalize o projeto e vá para a Fase 3. Passo 13: Estude a possibilidade de se instalar um sistema de controle ativo de ruído complementar. Se for o caso siga e repita a Fase 4 do procedimento detalhado 6.1.2. Desenvolvimento da Fase 3: Finalização. Passo 14: Complemente o projeto do sistema de controle de ruído considerando aspectos econômicos e práticos, detalhes construtivos ou especificações do problema. A Figura 6.2 mostra um fluxograma deste procedimento.
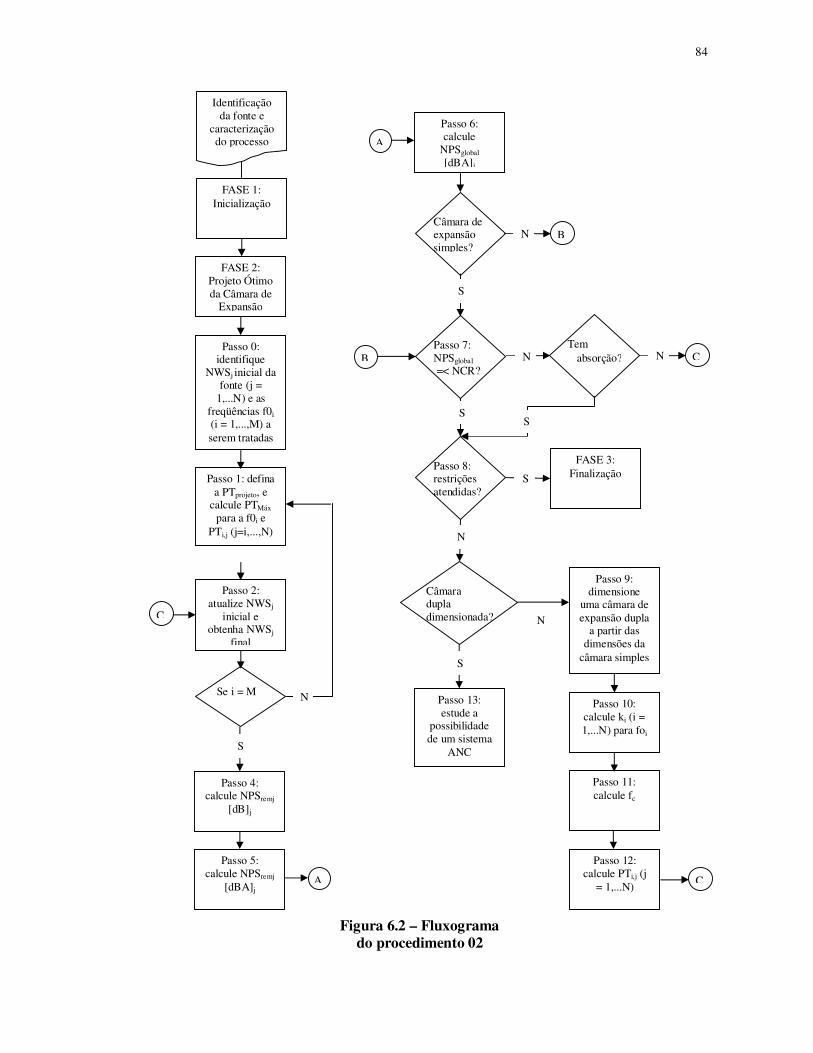
84
Figura 6.2 – Fluxograma
do procedimento 02
Identificação da fonte e
caracterização do processo
FASE 1: Inicialização
FASE 2: Projeto Ótimo da Câmara de
Expansão
Passo 0: identifique
NWSj inicial da fonte (j =
1,...N) e as freqüências f0i (i = 1,...,M) a serem tratadas
Passo 1: defina a PTprojeto, e
calcule PTMáx
para a f0i e PTi,j (j=i,...,N)
Passo 2: atualize NWSj
inicial e obtenha NWSj
final
Passo 4: calcule NPSremj
[dB]j
Se i = M
A
S
Passo 5: calcule NPSremj
[dBA]j
Passo 6: calcule
NPSglobal
[dBA]j
A
C
Passo 9: dimensione
uma câmara de expansão dupla
a partir das dimensões da
câmara simples
C
Passo 10: calcule ki (i = 1,...N) para foi
Passo 11: calcule fc
Passo 12: calcule PTi,j (j
= 1,...N)
Passo 7: NPSglobal =< NCR?
N
Passo 8: restrições atendidas?
S
Câmara de expansão simples?
N
S
N
S
C
Tem absorção?
S
N
B N
B
Câmara dupla dimensionada? N
S
FASE 3: Finalização
Passo 13: estude a
possibilidade de um sistema
ANC

85
7 RESULTADOS
7.1 Projeto Ótimo Híbrido – Problema Prático 01
7.1.1 Dados Utilizados para Inicializar o Projeto
Para o tratamento acústico de elevados níveis de potência sonora irradiados a partir da
descarga de um ventilador que compõe um sistema de exaustão industrial, será aplicado o procedimento de projeto ótimo híbrido. Especificações do Ventilador: Tipo: centrifugo; Controle de rotação: velocidade constante; Tipo de palheta: pás inclinadas para trás; Rotação: 1780rpm Freqüência de passagem das pás: 267Hz (250Hz em bandas de 1/1 oitava) Características do Escoamento: Pressão barométrica: 101,325kPa; Fluido transportado: ar atmosférico e finos de óxido de ferro; Volume na sucção: 320000m3/h; Pressão estática do ventilador: 413mmca; Temperatura de operação na sucção: 600C; Densidade do fluido na sucção: 1,059kg/m3; Para a caracterização do duto de exaustão, especifique: Geometria do duto: retangular. Dimensões internas: 2000 x 1400mm. Espessura da parede do duto: 6,35mm. Comprimento máximo admissível do dispositivo: 3000mm Espectro Sonoro Calculado (Bistafa, 2006):
Freqüência (Hz) em
bandas de 1/1 oitava
63 125 250 500 1000 2000 4000 8000
NWS 115 109 120 109 107 102 100 99 O nível de potência sonora, NWS, foi estimado na exaustão do ventilador.
7.1.2 Resultados do Projeto Ótimo Híbrido
O desenho esquemático do sistema de exaustão, incluindo o sistema de controle de
ruído projetado pela aplicação do algoritmo de projeto ótimo é mostrado na Figura 7.1.
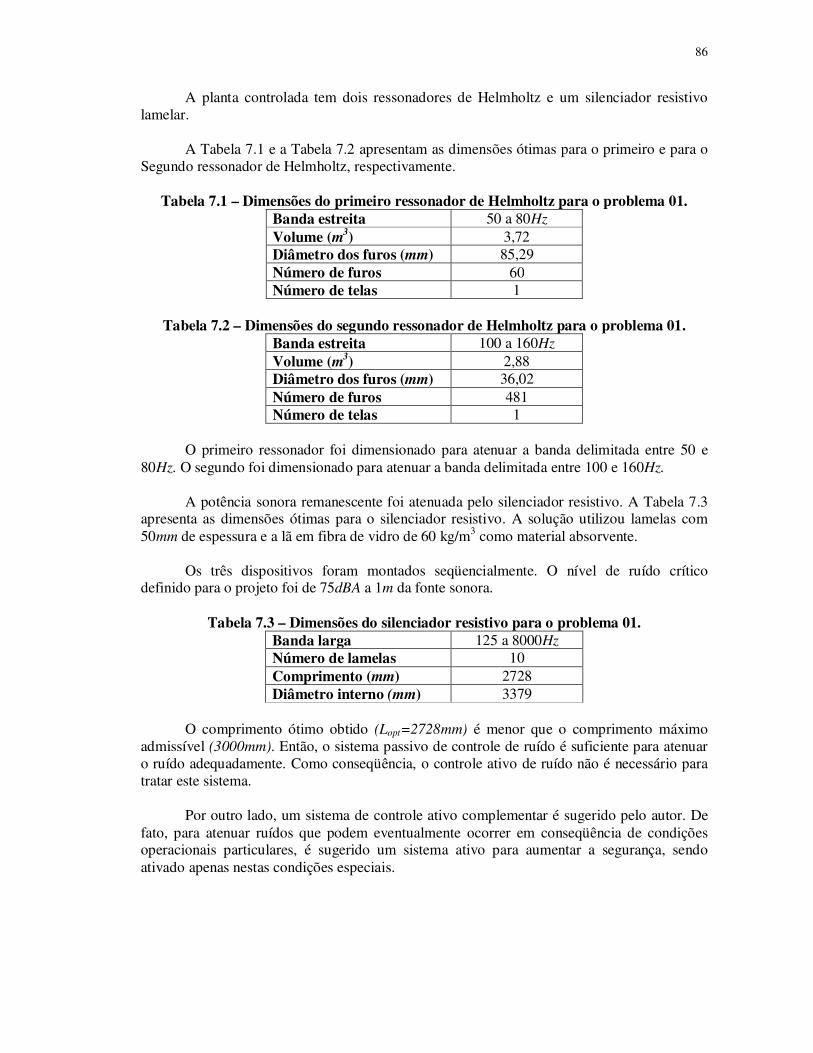
86
A planta controlada tem dois ressonadores de Helmholtz e um silenciador resistivo lamelar.
A Tabela 7.1 e a Tabela 7.2 apresentam as dimensões ótimas para o primeiro e para o
Segundo ressonador de Helmholtz, respectivamente.
Tabela 7.1 – Dimensões do primeiro ressonador de Helmholtz para o problema 01. Banda estreita 50 a 80Hz Volume (m3) 3,72 Diâmetro dos furos (mm) 85,29 Número de furos 60 Número de telas 1
Tabela 7.2 – Dimensões do segundo ressonador de Helmholtz para o problema 01.
Banda estreita 100 a 160Hz Volume (m3) 2,88 Diâmetro dos furos (mm) 36,02 Número de furos 481 Número de telas 1
O primeiro ressonador foi dimensionado para atenuar a banda delimitada entre 50 e
80Hz. O segundo foi dimensionado para atenuar a banda delimitada entre 100 e 160Hz. A potência sonora remanescente foi atenuada pelo silenciador resistivo. A Tabela 7.3
apresenta as dimensões ótimas para o silenciador resistivo. A solução utilizou lamelas com 50mm de espessura e a lã em fibra de vidro de 60 kg/m3 como material absorvente.
Os três dispositivos foram montados seqüencialmente. O nível de ruído crítico
definido para o projeto foi de 75dBA a 1m da fonte sonora.
Tabela 7.3 – Dimensões do silenciador resistivo para o problema 01. Banda larga 125 a 8000Hz Número de lamelas 10 Comprimento (mm) 2728 Diâmetro interno (mm) 3379
O comprimento ótimo obtido (Lopt=2728mm) é menor que o comprimento máximo
admissível (3000mm). Então, o sistema passivo de controle de ruído é suficiente para atenuar o ruído adequadamente. Como conseqüência, o controle ativo de ruído não é necessário para tratar este sistema.
Por outro lado, um sistema de controle ativo complementar é sugerido pelo autor. De
fato, para atenuar ruídos que podem eventualmente ocorrer em conseqüência de condições operacionais particulares, é sugerido um sistema ativo para aumentar a segurança, sendo ativado apenas nestas condições especiais.
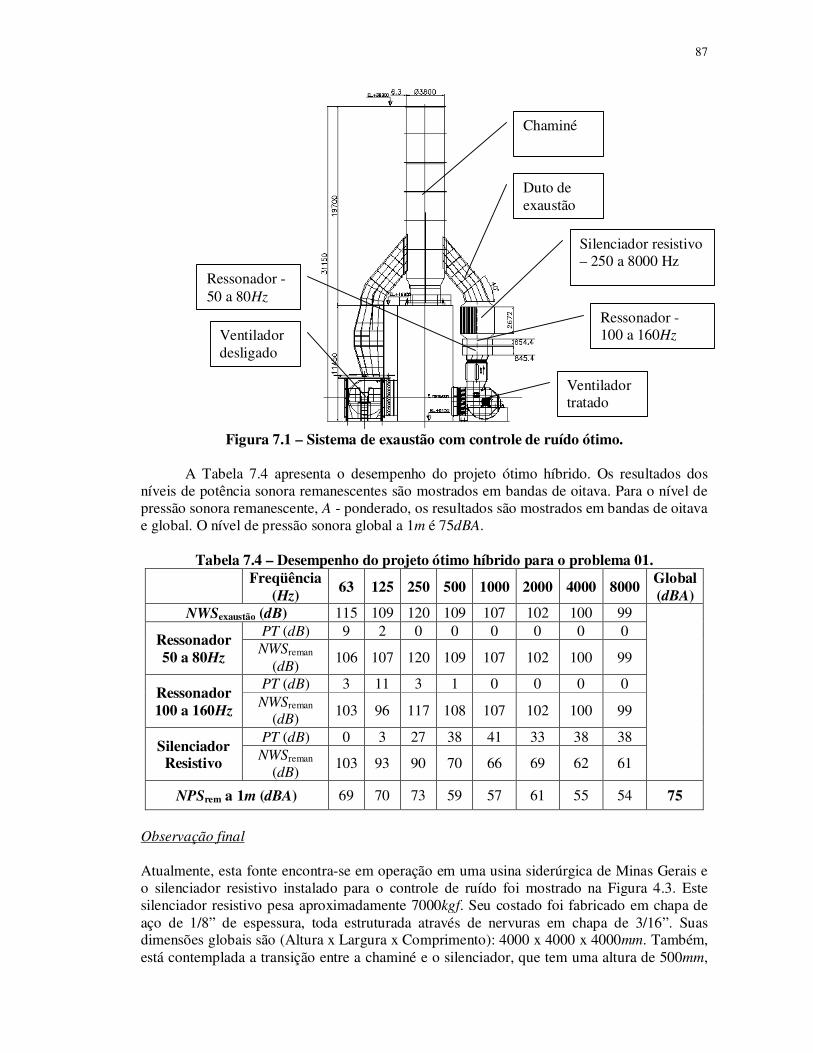
87
Figura 7.1 – Sistema de exaustão com controle de ruído ótimo.
A Tabela 7.4 apresenta o desempenho do projeto ótimo híbrido. Os resultados dos
níveis de potência sonora remanescentes são mostrados em bandas de oitava. Para o nível de pressão sonora remanescente, A - ponderado, os resultados são mostrados em bandas de oitava e global. O nível de pressão sonora global a 1m é 75dBA.
Tabela 7.4 – Desempenho do projeto ótimo híbrido para o problema 01.
Freqüência
(Hz) 63 125 250 500 1000 2000 4000 8000 Global (dBA)
NWSexaustão (dB) 115 109 120 109 107 102 100 99
Ressonador 50 a 80Hz
PT (dB) 9 2 0 0 0 0 0 0 NWSreman
(dB) 106 107 120 109 107 102 100 99
Ressonador 100 a 160Hz
PT (dB) 3 11 3 1 0 0 0 0 NWSreman
(dB) 103 96 117 108 107 102 100 99
Silenciador Resistivo
PT (dB) 0 3 27 38 41 33 38 38 NWSreman
(dB) 103 93 90 70 66 69 62 61
NPSrem a 1m (dBA) 69 70 73 59 57 61 55 54 75
Observação final Atualmente, esta fonte encontra-se em operação em uma usina siderúrgica de Minas Gerais e o silenciador resistivo instalado para o controle de ruído foi mostrado na Figura 4.3. Este silenciador resistivo pesa aproximadamente 7000kgf. Seu costado foi fabricado em chapa de aço de 1/8” de espessura, toda estruturada através de nervuras em chapa de 3/16”. Suas dimensões globais são (Altura x Largura x Comprimento): 4000 x 4000 x 4000mm. Também, está contemplada a transição entre a chaminé e o silenciador, que tem uma altura de 500mm,
Ressonador - 100 a 160Hz
Ressonador - 50 a 80Hz
Silenciador resistivo – 250 a 8000 Hz
Ventilador desligado
Duto de exaustão
Chaminé
Ventilador tratado
88
toda fabricada em chapa de aço, com espessura de 3/16”. Para a absorção sonora foram utilizadas 22 lamelas, todas estruturadas em perfis metálicos, em chapa #14 e preenchidas com material absorvente, além da proteção mecânica em tela metálica. Desta forma, pode-se afirmar que a solução apresentada no item 7.1.2 seria mais viável técnica e economicamente. Tecnicamente, pela maior facilidade de fabricação e pela maior durabilidade, especialmente dos ressonadores de Helmholtz. Economicamente, pela racionalização de matérias construtivos, tendo em vista que o duto principal faz parte dos ressonadores. Também o custo de movimentação de carga, além do impacto de cargas na estrutura seriam menores.
7.2 Projeto Ótimo Híbrido – Problema Prático 02
7.2.1 Dados Utilizados para Inicializar o Projeto
Para o tratamento acústico de elevados níveis de potência sonora irradiados a partir da
descarga de um ventilador que compõe um sistema de exaustão industrial, será aplicado o procedimento de projeto ótimo híbrido. Especificações do Ventilador: Tipo: centrifugo; Controle de rotação: velocidade constante; Tipo de palheta: pás inclinadas para trás; Rotação: 1180rpm Freqüência: 60Hz. Características do Escoamento: Pressão barométrica: 98,403kPa; Carga de pó: 30mg/Nm3; Fluido transportado: ar e óxido de ferro; Volume na sucção: 725000m3/h; Pressão estática do ventilador: 550mmca; Temperatura de operação na sucção: 1100C; Densidade do fluido na sucção: 0,8551kg/m3; Para a caracterização do duto de exaustão, especifique: Geometria do duto: retangular. Dimensões internas: 2694 x 1731mm. Espessura da parede do duto: 6,35mm. Comprimento máximo admissível do duto: 10000mm Espectro Sonoro Calculado (Bistafa, 2006): Freqüência
(Hz) em bandas de 1/1 oitava
63 125 250 500 1000 2000 4000 8000
NWS 131 117 120 117 115 110 108 107 O nível de potência sonora, NWS, foi estimado na exaustão do ventilador.
89
7.2.2 Resultados do Projeto Ótimo Híbrido
O desenho esquemático do sistema de exaustão, incluindo o sistema de controle de
ruído projetado pela aplicação do algoritmo de projeto ótimo é mostrado na Figura 7.2.
A planta controlada tem dois ressonadores de Helmholtz e um silenciador resistivo lamelar.
As Tabelas 7.5, 7.6 e 7.7 apresentam as dimensões ótimas para o primeiro, para o segundo e para o terceiro ressonador de Helmholtz, respectivamente.
Tabela 7.5 – Dimensões do primeiro ressonador de Helmholtz.
Banda estreita 50 a 80Hz Volume (m3) 25,546 Diâmetro dos furos (mm) 93,315 Número de furos 325 Número de telas 1
Tabela 7.6 – Dimensões do segundo ressonador de Helmholtz.
Banda estreita 100 a 160Hz Volume (m3) 1,522 Diâmetro dos furos (mm) 63,203 Número de furos 117 Número de telas 1
Tabela 7.7 – Dimensões do terceiro ressonador de Helmholtz.
Banda estreita 240 a 260Hz Volume (m3) 1,752 Diâmetro dos furos (mm) 141,893 Número de furos 225 Número de telas 1
O primeiro ressonador foi dimensionado para atenuar a banda estreita entre 50 e 80Hz.
O segundo foi dimensionado para atenuar a banda estreita ente 100 e 160Hz. O terceiro foi dimensionado para atenuar a banda estreita ente 240 e 260Hz.
A potência sonora remanescente foi atenuada pelo silenciador resistivo. A Tabela 7.8
apresenta as dimensões ótimas para o silenciador resistivo. A solução utilizou lamelas com 100mm de espessura e a lã de rocha de 60 kg/m3 como material absorvente.
Tabela 7.8 – Dimensões do silenciador resistivo. Banda larga 125 a 8000Hz Número de lamelas 9 Comprimento (mm) 2922 Diâmetro interno (mm) 5381
Os três dispositivos foram montados seqüencialmente. O nível de ruído crítico
definido para o projeto foi de 85dBA a 1m da fonte sonora.
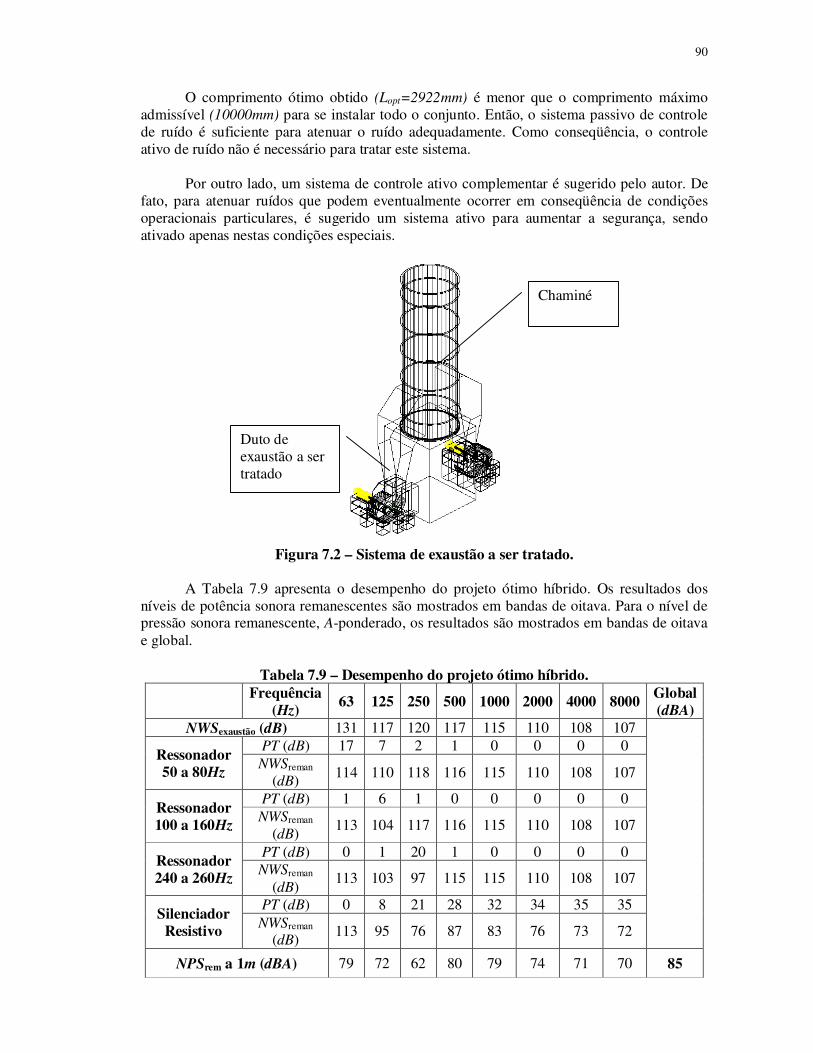
90
O comprimento ótimo obtido (Lopt=2922mm) é menor que o comprimento máximo admissível (10000mm) para se instalar todo o conjunto. Então, o sistema passivo de controle de ruído é suficiente para atenuar o ruído adequadamente. Como conseqüência, o controle ativo de ruído não é necessário para tratar este sistema.
Por outro lado, um sistema de controle ativo complementar é sugerido pelo autor. De
fato, para atenuar ruídos que podem eventualmente ocorrer em conseqüência de condições operacionais particulares, é sugerido um sistema ativo para aumentar a segurança, sendo ativado apenas nestas condições especiais.
Figura 7.2 – Sistema de exaustão a ser tratado.
A Tabela 7.9 apresenta o desempenho do projeto ótimo híbrido. Os resultados dos
níveis de potência sonora remanescentes são mostrados em bandas de oitava. Para o nível de pressão sonora remanescente, A-ponderado, os resultados são mostrados em bandas de oitava e global.
Tabela 7.9 – Desempenho do projeto ótimo híbrido.
Frequência (Hz) 63 125 250 500 1000 2000 4000 8000 Global
(dBA) NWSexaustão (dB) 131 117 120 117 115 110 108 107
Ressonador 50 a 80Hz
PT (dB) 17 7 2 1 0 0 0 0 NWSreman
(dB) 114 110 118 116 115 110 108 107
Ressonador 100 a 160Hz
PT (dB) 1 6 1 0 0 0 0 0 NWSreman
(dB) 113 104 117 116 115 110 108 107
Ressonador 240 a 260Hz
PT (dB) 0 1 20 1 0 0 0 0 NWSreman
(dB) 113 103 97 115 115 110 108 107
Silenciador Resistivo
PT (dB) 0 8 21 28 32 34 35 35 NWSreman
(dB) 113 95 76 87 83 76 73 72
NPSrem a 1m (dBA) 79 72 62 80 79 74 71 70 85
Chaminé
Duto de exaustão a ser tratado
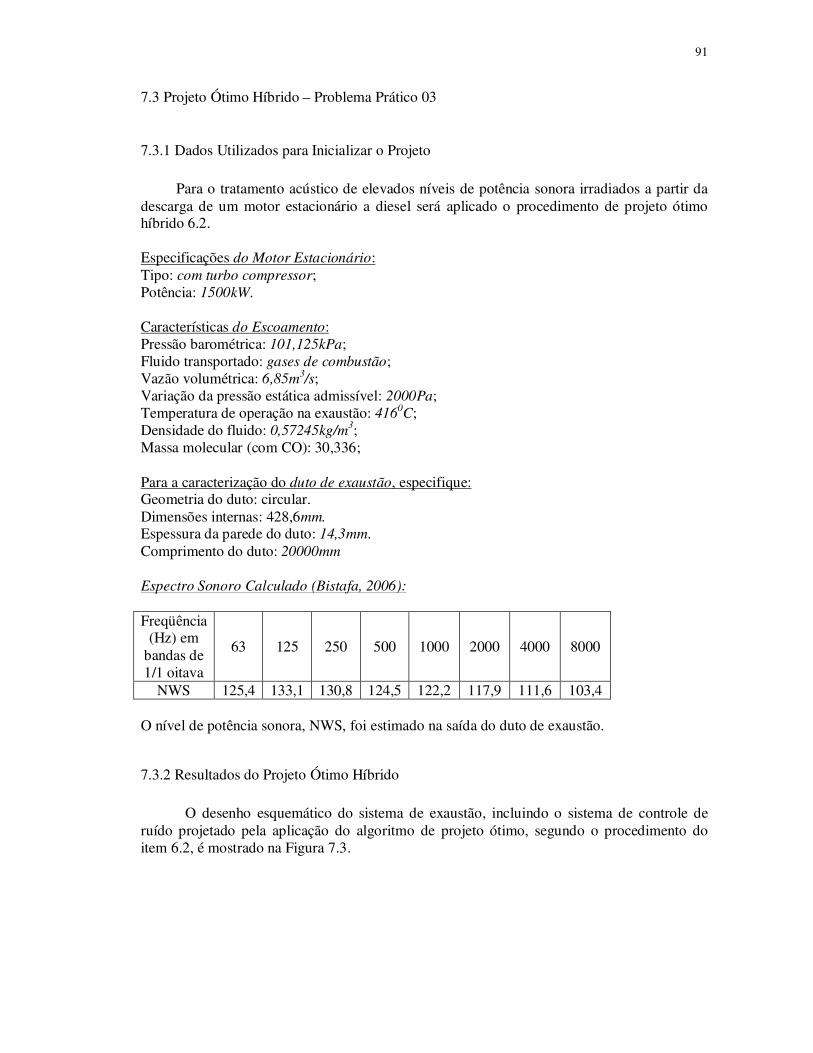
91
7.3 Projeto Ótimo Híbrido – Problema Prático 03
7.3.1 Dados Utilizados para Inicializar o Projeto
Para o tratamento acústico de elevados níveis de potência sonora irradiados a partir da
descarga de um motor estacionário a diesel será aplicado o procedimento de projeto ótimo híbrido 6.2. Especificações do Motor Estacionário: Tipo: com turbo compressor; Potência: 1500kW. Características do Escoamento: Pressão barométrica: 101,125kPa; Fluido transportado: gases de combustão; Vazão volumétrica: 6,85m3/s; Variação da pressão estática admissível: 2000Pa; Temperatura de operação na exaustão: 4160C; Densidade do fluido: 0,57245kg/m3; Massa molecular (com CO): 30,336; Para a caracterização do duto de exaustão, especifique: Geometria do duto: circular. Dimensões internas: 428,6mm. Espessura da parede do duto: 14,3mm. Comprimento do duto: 20000mm Espectro Sonoro Calculado (Bistafa, 2006): Freqüência
(Hz) em bandas de 1/1 oitava
63 125 250 500 1000 2000 4000 8000
NWS 125,4 133,1 130,8 124,5 122,2 117,9 111,6 103,4 O nível de potência sonora, NWS, foi estimado na saída do duto de exaustão.
7.3.2 Resultados do Projeto Ótimo Híbrido
O desenho esquemático do sistema de exaustão, incluindo o sistema de controle de
ruído projetado pela aplicação do algoritmo de projeto ótimo, segundo o procedimento do item 6.2, é mostrado na Figura 7.3.

92
Figura 7.3 – Tubulação do sistema de exaustão de um motor estacionário a diesel tratado com câmara de expansão. Na vista lateral: 1) silenciador; 2) suporte; 3)
tubulação de exaustão existente. A Tabela 7.10 apresenta a freqüência de corte e as dimensões ótimas da câmara de
expansão dupla interligada internamente por um duto.
Tabela 7.10 – Dimensões da câmara de expansão dupla. Freqüência de corte 17,25Hz Comprimento total do dispositivo (mm)
3660
Comprimento do duto de ligação (mm)
1830
Diâmetro interno da área livre(mm)
1550
A freqüência de corte é a primeira freqüência da banda de operação da câmara de
expansão dupla, que esta bem abaixo das freqüências de interesse de 63Hz a 8000Hz. O material absorvente utilizado foi a manta em fibra cerâmica com uma densidade de
64kg/m3 e espessura de 100mm. Os coeficientes de absorção para cada freqüência do espectro foram ponderados para a temperatura de 4160C, considerando o método apresentado por Beranek e Vér (1992).
A Tabela 7.11 apresenta o desempenho do projeto ótimo híbrido. Os resultados dos
níveis de potência sonora remanescentes são mostrados em bandas de oitava. Para o nível de pressão sonora remanescente, A-ponderado, o resultado mostrado é o global. Como pode ser observado na Tabela 7.11, o resultado é satisfatório considerando uma câmara de expansão dupla interligada por um duto interno e aplicando material de absorção sonora nas paredes internas do dispositivo de controle de ruído. Nesta configuração o nível de pressão sonora remanescente global ficou abaixo do nível critico de ruído de 85dB(A) a 1m do tratamento.
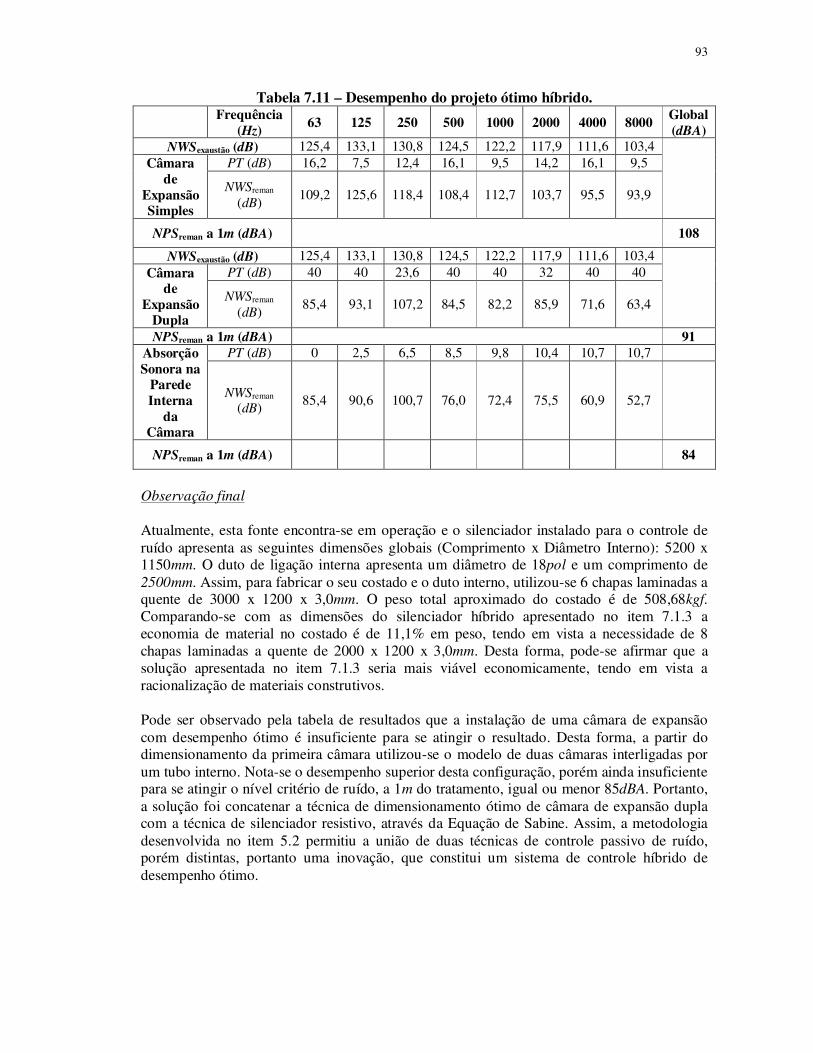
93
Tabela 7.11 – Desempenho do projeto ótimo híbrido.
Frequência
(Hz) 63 125 250 500 1000 2000 4000 8000
Global (dBA)
NWSexaustão (dB) 125,4 133,1 130,8 124,5 122,2 117,9 111,6 103,4
Câmara
de Expansão Simples
PT (dB) 16,2 7,5 12,4 16,1 9,5 14,2 16,1 9,5
NWSreman (dB)
109,2 125,6 118,4 108,4 112,7 103,7 95,5 93,9
NPSreman a 1m (dBA) 108
NWSexaustão (dB) 125,4 133,1 130,8 124,5 122,2 117,9 111,6 103,4
Câmara
de Expansão
Dupla
PT (dB) 40 40 23,6 40 40 32 40 40
NWSreman (dB)
85,4 93,1 107,2 84,5 82,2 85,9 71,6 63,4
NPSreman a 1m (dBA) 91 Absorção Sonora na
Parede Interna
da Câmara
PT (dB) 0 2,5 6,5 8,5 9,8 10,4 10,7 10,7
NWSreman (dB)
85,4 90,6 100,7 76,0 72,4 75,5 60,9 52,7
NPSreman a 1m (dBA) 84
Observação final Atualmente, esta fonte encontra-se em operação e o silenciador instalado para o controle de ruído apresenta as seguintes dimensões globais (Comprimento x Diâmetro Interno): 5200 x 1150mm. O duto de ligação interna apresenta um diâmetro de 18pol e um comprimento de 2500mm. Assim, para fabricar o seu costado e o duto interno, utilizou-se 6 chapas laminadas a quente de 3000 x 1200 x 3,0mm. O peso total aproximado do costado é de 508,68kgf. Comparando-se com as dimensões do silenciador híbrido apresentado no item 7.1.3 a economia de material no costado é de 11,1% em peso, tendo em vista a necessidade de 8 chapas laminadas a quente de 2000 x 1200 x 3,0mm. Desta forma, pode-se afirmar que a solução apresentada no item 7.1.3 seria mais viável economicamente, tendo em vista a racionalização de materiais construtivos. Pode ser observado pela tabela de resultados que a instalação de uma câmara de expansão com desempenho ótimo é insuficiente para se atingir o resultado. Desta forma, a partir do dimensionamento da primeira câmara utilizou-se o modelo de duas câmaras interligadas por um tubo interno. Nota-se o desempenho superior desta configuração, porém ainda insuficiente para se atingir o nível critério de ruído, a 1m do tratamento, igual ou menor 85dBA. Portanto, a solução foi concatenar a técnica de dimensionamento ótimo de câmara de expansão dupla com a técnica de silenciador resistivo, através da Equação de Sabine. Assim, a metodologia desenvolvida no item 5.2 permitiu a união de duas técnicas de controle passivo de ruído, porém distintas, portanto uma inovação, que constitui um sistema de controle híbrido de desempenho ótimo.
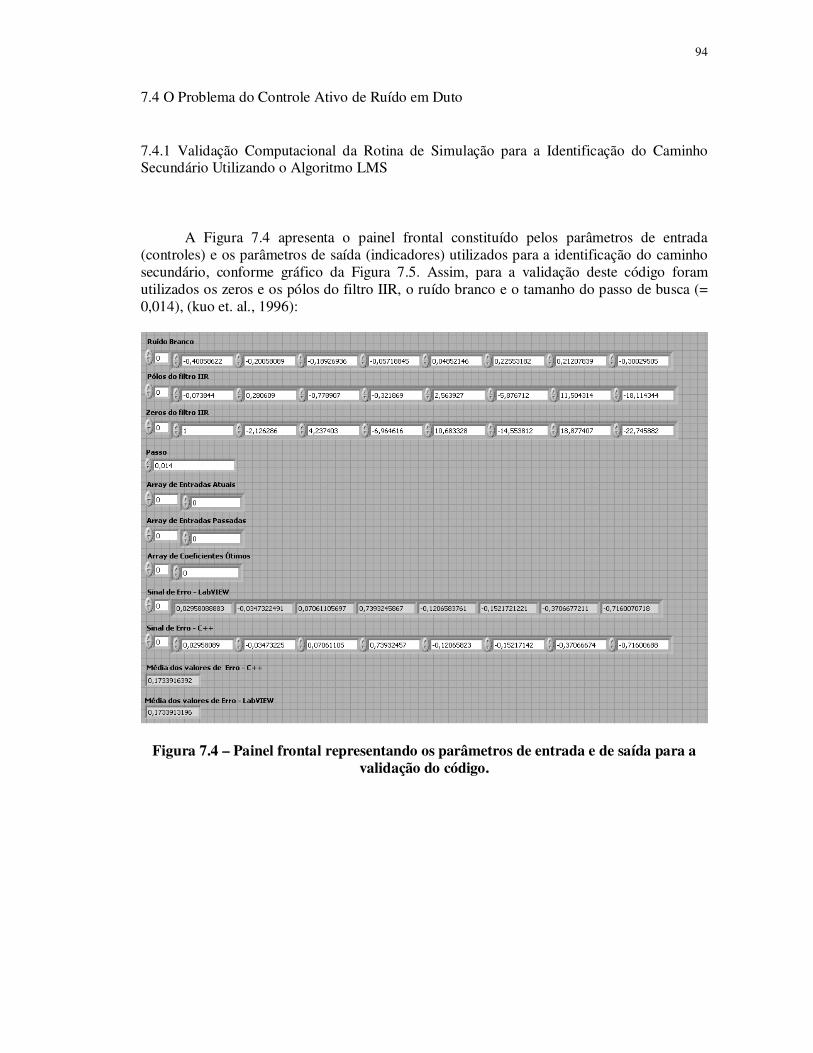
94
7.4 O Problema do Controle Ativo de Ruído em Duto
7.4.1 Validação Computacional da Rotina de Simulação para a Identificação do Caminho Secundário Utilizando o Algoritmo LMS
A Figura 7.4 apresenta o painel frontal constituído pelos parâmetros de entrada (controles) e os parâmetros de saída (indicadores) utilizados para a identificação do caminho secundário, conforme gráfico da Figura 7.5. Assim, para a validação deste código foram utilizados os zeros e os pólos do filtro IIR, o ruído branco e o tamanho do passo de busca (= 0,014), (kuo et. al., 1996):
Figura 7.4 – Painel frontal representando os parâmetros de entrada e de saída para a validação do código.

95
Figura 7.5 – Comparação gráfica entre o ruído branco “desejado” (cor branca) e o ruído branco adaptado (cor vermelha).
Analisando as Figuras 7.4 e 7.5, respectivamente, pode ser verificado que a adaptação
do ruído branco foi realizada. A diferença entre as médias dos erros utilizando-se o código em C++ do Sen Kuo e o código em LabView é da ordem de 1E-6. Desta forma, este resultado demonstra a confiabilidade do código computacional desenvolvido em Lab View. Assim, este é o primeiro passo para a construção de uma ferramenta de análise para auxiliar na elaboração de uma estratégia de controle ativo de ruído em dutos. Os diagramas de blocos dos programas de simulação e os coeficientes das funções de transferência que representam o caminho primário e secundário são apresentados no Apêndice B.
7.4.2 Simulação Computacional para Análise Teórica da Estratégia de Controle Ativo Utilizando o Algoritmo FXLMS
A seguir são apresentados os resultados da simulação computacional para um sistema ANC
com apenas uma fonte de cancelamento, um sensor de erro e 2000 amostras por segundo, cujo sinal de erro vem da soma do ruído gerado pela fonte primária e do ruído gerado pela fonte secundária captado pelo sensor de erro. O ruído da fonte secundária é gerado pela convolução linear do sinal de controle e a função de transferência a partir da fonte de controle e o sensor de erro. Desta forma, a Figura 7.6 representa o sinal de cancelamento a partir da fonte secundária para 500Hz e 250Hz, respectivamente. Nesta simulação computacional o algoritmo FXLMS considerou um passo µ = 0,001 e filtros digitais com 25 coeficientes na função de transferência (n =25). Nota-se que o ruído da fonte secundária para 250Hz é divergente, ou seja, o sistema de controle ainda não está controlando a freqüência de 250Hz. Já para a freqüência de 500Hz o sistema encontra-se estável.
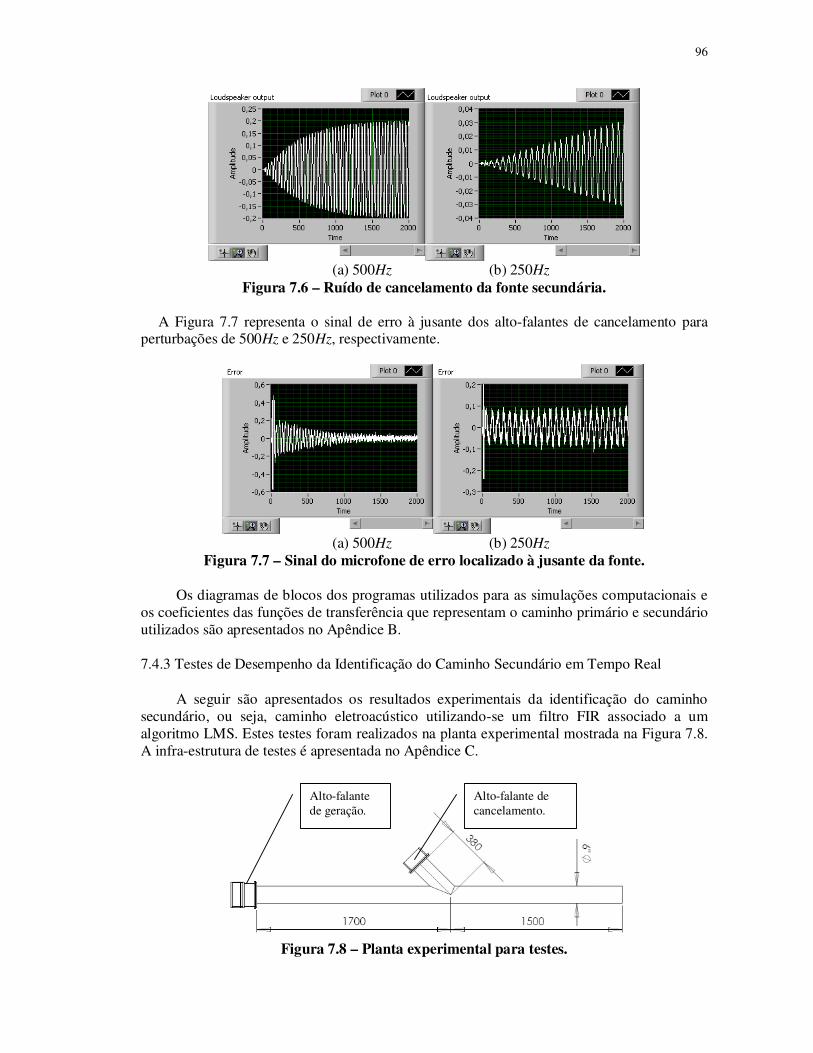
96
(a) 500Hz (b) 250Hz
Figura 7.6 – Ruído de cancelamento da fonte secundária. A Figura 7.7 representa o sinal de erro à jusante dos alto-falantes de cancelamento para
perturbações de 500Hz e 250Hz, respectivamente.
(a) 500Hz (b) 250Hz
Figura 7.7 – Sinal do microfone de erro localizado à jusante da fonte.
Os diagramas de blocos dos programas utilizados para as simulações computacionais e os coeficientes das funções de transferência que representam o caminho primário e secundário utilizados são apresentados no Apêndice B.
7.4.3 Testes de Desempenho da Identificação do Caminho Secundário em Tempo Real
A seguir são apresentados os resultados experimentais da identificação do caminho secundário, ou seja, caminho eletroacústico utilizando-se um filtro FIR associado a um algoritmo LMS. Estes testes foram realizados na planta experimental mostrada na Figura 7.8. A infra-estrutura de testes é apresentada no Apêndice C.
Figura 7.8 – Planta experimental para testes.
Alto-falante de geração.
Alto-falante de cancelamento.
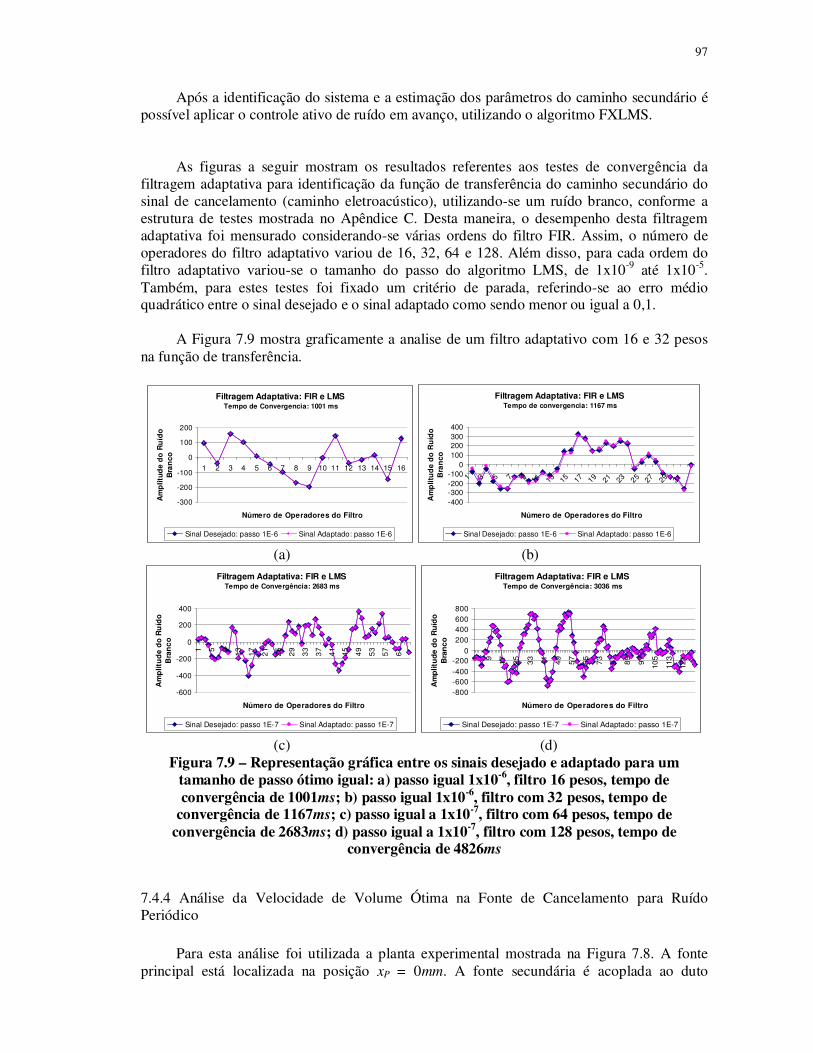
97
Após a identificação do sistema e a estimação dos parâmetros do caminho secundário é possível aplicar o controle ativo de ruído em avanço, utilizando o algoritmo FXLMS.
As figuras a seguir mostram os resultados referentes aos testes de convergência da filtragem adaptativa para identificação da função de transferência do caminho secundário do sinal de cancelamento (caminho eletroacústico), utilizando-se um ruído branco, conforme a estrutura de testes mostrada no Apêndice C. Desta maneira, o desempenho desta filtragem adaptativa foi mensurado considerando-se várias ordens do filtro FIR. Assim, o número de operadores do filtro adaptativo variou de 16, 32, 64 e 128. Além disso, para cada ordem do filtro adaptativo variou-se o tamanho do passo do algoritmo LMS, de 1x10-9 até 1x10-5. Também, para estes testes foi fixado um critério de parada, referindo-se ao erro médio quadrático entre o sinal desejado e o sinal adaptado como sendo menor ou igual a 0,1. A Figura 7.9 mostra graficamente a analise de um filtro adaptativo com 16 e 32 pesos na função de transferência.
Filtragem Adaptativa: FIR e LMSTempo de Convergencia: 1001 ms
-300
-200
-100
0
100
200
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Número de Operadores do Filtro
Am
pli
tud
e d
o R
uíd
o
Bra
nc
o
Sinal Desejado: passo 1E-6 Sinal Adaptado: passo 1E-6
Filtragem Adaptativa: FIR e LMSTempo de convergencia: 1167 ms
-400
-300
-200
-100
0
100
200
300
400
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31
Número de Operadores do Filtro
Am
plitu
de
do
Ru
ído
Bra
nco
Sinal Desejado: passo 1E-6 Sinal Adaptado: passo 1E-6
(a) (b)
Filtragem Adaptativa: FIR e LMSTempo de Convergência: 2683 ms
-600
-400
-200
0
200
400
1 5 9
13
17
21
25
29
33
37
41
45
49
53
57
61
Número de Operadores do Filtro
Am
plitu
de d
o R
uíd
o
Bra
nc
o
Sinal Desejado: passo 1E-7 Sinal Adaptado: passo 1E-7
Filtragem Adaptativa: FIR e LMSTempo de Convergência: 3036 ms
-800
-600
-400
-200
0
200
400
600
800
1 9
17
25
33
41
49
57
65
73
81
89
97
10
5
11
3
12
1
Número de Operadores do Filtro
Am
plitu
de d
o R
uíd
o
Bra
nc
o
Sinal Desejado: passo 1E-7 Sinal Adaptado: passo 1E-7
(c) (d) Figura 7.9 – Representação gráfica entre os sinais desejado e adaptado para um
tamanho de passo ótimo igual: a) passo igual 1x10-6, filtro 16 pesos, tempo de convergência de 1001ms; b) passo igual 1x10-6, filtro com 32 pesos, tempo de
convergência de 1167ms; c) passo igual a 1x10-7, filtro com 64 pesos, tempo de convergência de 2683ms; d) passo igual a 1x10-7, filtro com 128 pesos, tempo de
convergência de 4826ms
7.4.4 Análise da Velocidade de Volume Ótima na Fonte de Cancelamento para Ruído Periódico
Para esta análise foi utilizada a planta experimental mostrada na Figura 7.8. A fonte principal está localizada na posição xP = 0mm. A fonte secundária é acoplada ao duto
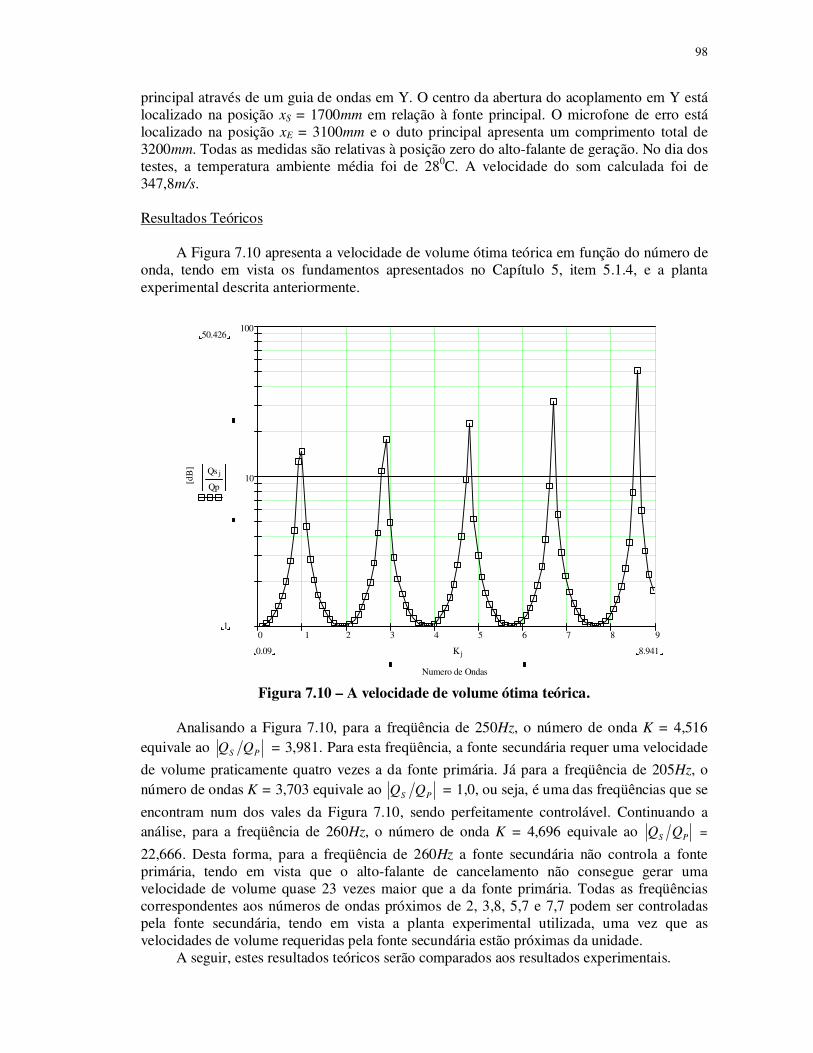
98
principal através de um guia de ondas em Y. O centro da abertura do acoplamento em Y está localizado na posição xS = 1700mm em relação à fonte principal. O microfone de erro está localizado na posição xE = 3100mm e o duto principal apresenta um comprimento total de 3200mm. Todas as medidas são relativas à posição zero do alto-falante de geração. No dia dos testes, a temperatura ambiente média foi de 280C. A velocidade do som calculada foi de 347,8m/s. Resultados Teóricos A Figura 7.10 apresenta a velocidade de volume ótima teórica em função do número de onda, tendo em vista os fundamentos apresentados no Capítulo 5, item 5.1.4, e a planta experimental descrita anteriormente.
0 1 2 3 4 5 6 7 8 9
10
100
Numero de Ondas
[dB
]
50.426
1
Qs j
Qp
8.9410.09 K j
Figura 7.10 – A velocidade de volume ótima teórica.
Analisando a Figura 7.10, para a freqüência de 250Hz, o número de onda K = 4,516 equivale ao PS QQ = 3,981. Para esta freqüência, a fonte secundária requer uma velocidade
de volume praticamente quatro vezes a da fonte primária. Já para a freqüência de 205Hz, o número de ondas K = 3,703 equivale ao PS QQ = 1,0, ou seja, é uma das freqüências que se
encontram num dos vales da Figura 7.10, sendo perfeitamente controlável. Continuando a análise, para a freqüência de 260Hz, o número de onda K = 4,696 equivale ao PS QQ =
22,666. Desta forma, para a freqüência de 260Hz a fonte secundária não controla a fonte primária, tendo em vista que o alto-falante de cancelamento não consegue gerar uma velocidade de volume quase 23 vezes maior que a da fonte primária. Todas as freqüências correspondentes aos números de ondas próximos de 2, 3,8, 5,7 e 7,7 podem ser controladas pela fonte secundária, tendo em vista a planta experimental utilizada, uma vez que as velocidades de volume requeridas pela fonte secundária estão próximas da unidade. A seguir, estes resultados teóricos serão comparados aos resultados experimentais.
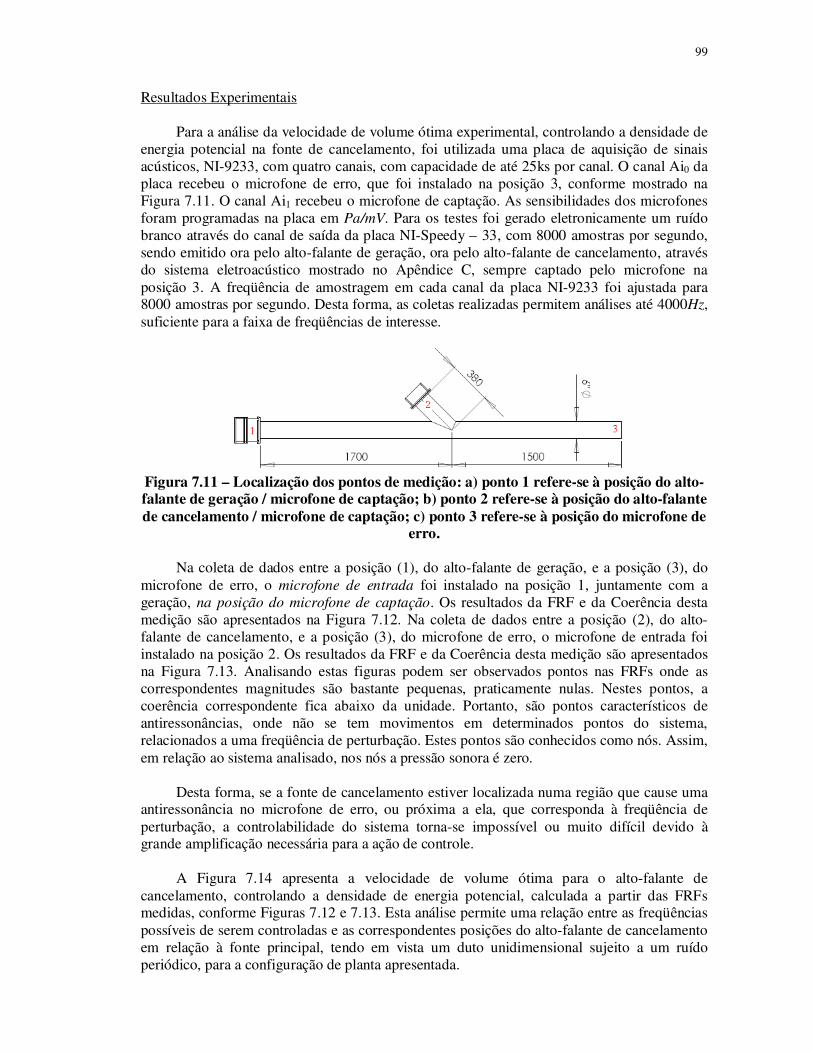
99
Resultados Experimentais Para a análise da velocidade de volume ótima experimental, controlando a densidade de energia potencial na fonte de cancelamento, foi utilizada uma placa de aquisição de sinais acústicos, NI-9233, com quatro canais, com capacidade de até 25ks por canal. O canal Ai0 da placa recebeu o microfone de erro, que foi instalado na posição 3, conforme mostrado na Figura 7.11. O canal Ai1 recebeu o microfone de captação. As sensibilidades dos microfones foram programadas na placa em Pa/mV. Para os testes foi gerado eletronicamente um ruído branco através do canal de saída da placa NI-Speedy – 33, com 8000 amostras por segundo, sendo emitido ora pelo alto-falante de geração, ora pelo alto-falante de cancelamento, através do sistema eletroacústico mostrado no Apêndice C, sempre captado pelo microfone na posição 3. A freqüência de amostragem em cada canal da placa NI-9233 foi ajustada para 8000 amostras por segundo. Desta forma, as coletas realizadas permitem análises até 4000Hz, suficiente para a faixa de freqüências de interesse.
Figura 7.11 – Localização dos pontos de medição: a) ponto 1 refere-se à posição do alto-falante de geração / microfone de captação; b) ponto 2 refere-se à posição do alto-falante de cancelamento / microfone de captação; c) ponto 3 refere-se à posição do microfone de
erro.
Na coleta de dados entre a posição (1), do alto-falante de geração, e a posição (3), do microfone de erro, o microfone de entrada foi instalado na posição 1, juntamente com a geração, na posição do microfone de captação. Os resultados da FRF e da Coerência desta medição são apresentados na Figura 7.12. Na coleta de dados entre a posição (2), do alto-falante de cancelamento, e a posição (3), do microfone de erro, o microfone de entrada foi instalado na posição 2. Os resultados da FRF e da Coerência desta medição são apresentados na Figura 7.13. Analisando estas figuras podem ser observados pontos nas FRFs onde as correspondentes magnitudes são bastante pequenas, praticamente nulas. Nestes pontos, a coerência correspondente fica abaixo da unidade. Portanto, são pontos característicos de antiressonâncias, onde não se tem movimentos em determinados pontos do sistema, relacionados a uma freqüência de perturbação. Estes pontos são conhecidos como nós. Assim, em relação ao sistema analisado, nos nós a pressão sonora é zero.
Desta forma, se a fonte de cancelamento estiver localizada numa região que cause uma
antiressonância no microfone de erro, ou próxima a ela, que corresponda à freqüência de perturbação, a controlabilidade do sistema torna-se impossível ou muito difícil devido à grande amplificação necessária para a ação de controle.
A Figura 7.14 apresenta a velocidade de volume ótima para o alto-falante de cancelamento, controlando a densidade de energia potencial, calculada a partir das FRFs medidas, conforme Figuras 7.12 e 7.13. Esta análise permite uma relação entre as freqüências possíveis de serem controladas e as correspondentes posições do alto-falante de cancelamento em relação à fonte principal, tendo em vista um duto unidimensional sujeito a um ruído periódico, para a configuração de planta apresentada.
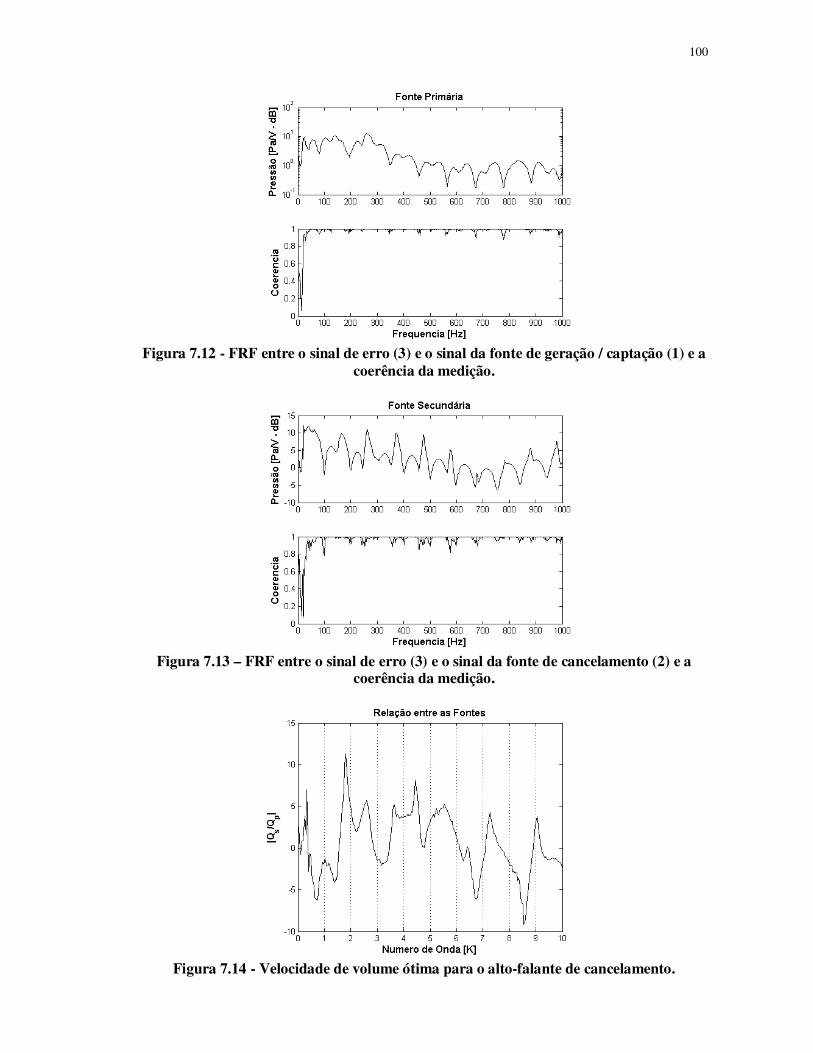
100
Figura 7.12 - FRF entre o sinal de erro (3) e o sinal da fonte de geração / captação (1) e a
coerência da medição.
Figura 7.13 – FRF entre o sinal de erro (3) e o sinal da fonte de cancelamento (2) e a
coerência da medição.
Figura 7.14 - Velocidade de volume ótima para o alto-falante de cancelamento.
101
Por fim, cabe salientar que a coerência medida entre a posição (2) do microfone de captação e a posição (3) do microfone de erro, mostrada na Figura 7.12 é uma boa maneira de se determinar a observabilidade entre os sensores do sistema, conforme descrito anteriormente.
Cabe salientar que a posição do microfone de erro deve ser tal que permita observar a maior amplitude possível da fonte primária, então, ele deve ser posicionado em regiões que represente os picos da Figura 7.12, obtendo assim a melhor observabilidade possível.
7.4.5 Testes de Desempenho do Controle Ativo de Ruído em Tempo Real para Ruído Periódico
As figuras e tabelas a seguir apresentam o desempenho acústico do sistema de controle ativo, conforme planta experimental descrita anteriormente no item 7.4.4 e infra-estrutura mostrada no Apêndice C. Assim, foi utilizada uma estratégia de filtragem adaptativa em avanço, uma versão filtrada do algoritmo LMS. A ordem do filtro foi de 32 operadores e foram utilizadas 512 amostras para a forma de onda. A seguir, são apresentados os resultados das medições realizadas durante os testes no Laboratório de Controle e Automação, no galpão da pós-graduação da engenharia mecânica da UFMG, para as freqüências de 250Hz e, num segundo momento, para a freqüência de 260Hz.
Os resultados apresentados a seguir evidenciam a efetividade da metodologia de projeto de um sistema de controle ativo de ruído baseada na análise da velocidade de controle ótima, controlando a densidade de energia potencial na fonte de cancelamento. Assim, esta técnica permite analisar previamente a controlabilidade do sistema para determinadas freqüências de perturbação, tendo em vista um ruído periódico. Num primeiro momento, foi gerado um ruído de características tonais predominantemente em 250Hz. As Figuras 7.15 a 7.17 e a Tabela 7.12 apresentam um resumo dos valores coletados durante o teste realizado. Analisando as Figuras 7.15, 7.16 e 7.17 nota-se um sistema de controle ativo estável, porém exigindo uma potência sonora maior na fonte de cancelamento em relação à fonte de geração, conforme evidenciado pela Figura 7.16a. Este resultado confirma as predições realizadas teórica e experimentalmente através da análise da velocidade de volume ótima, controlando a densidade de energia potencial na fonte de cancelamento. A Tabela 7.12 apresenta os seguintes níveis de pressão sonora (NPS) em dB e dBA, medidos a 1m da saída do duto, conforme figuras apresentadas. Assim, tem-se:
i. A coluna 03 apresenta o ruído de fundo: 58,2dB ou 49,7dBA a 1m; ii. A coluna 01 apresenta a emissão sonora sem o controle ANC: 77dB
ou 68,4dBA; iii. A coluna 02 apresenta a emissão sonora com o controle ANC
estabilizado: 62,3dB ou 54,2dBA.
Desta forma, retirando a influencia do ruído de fundo no resultado do item iii, o desempenho do controle ativo medido a 1m da saída do duto é de 16,8dB.
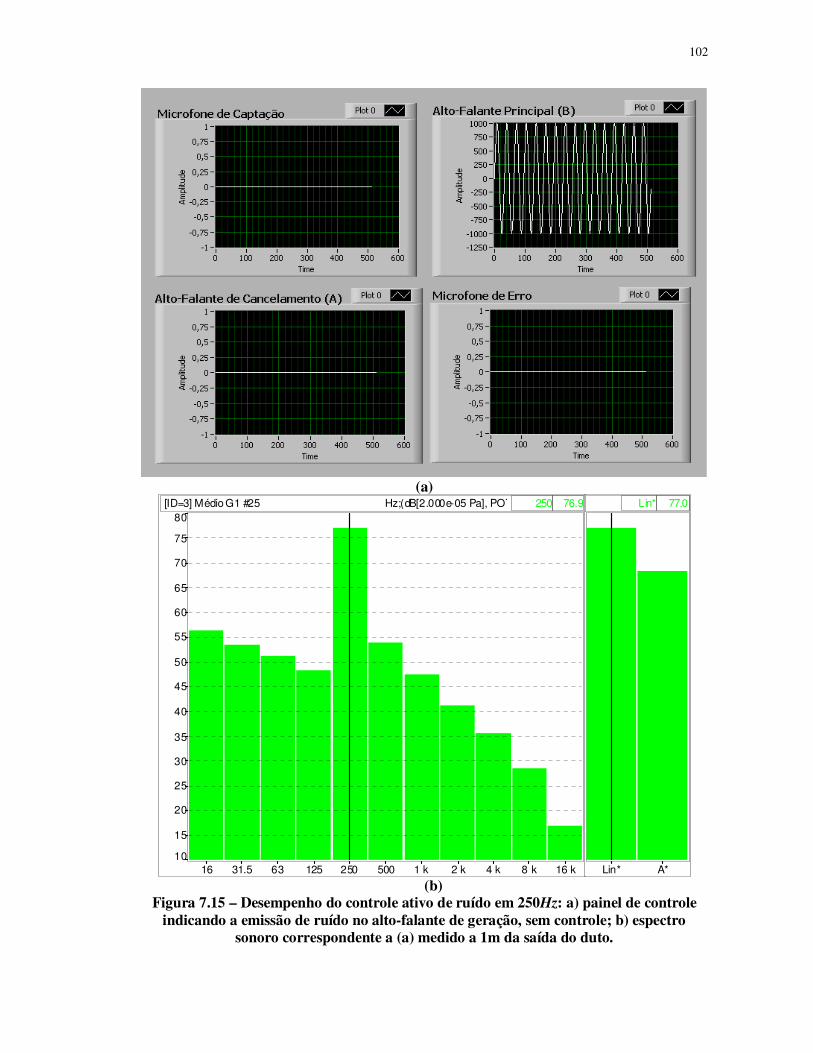
102
(a)
[ID=3] Médio G1 #25 Hz;(dB[2.000e-05 Pa], POT) 250 76.9
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 77.0
Lin* A* (b)
Figura 7.15 – Desempenho do controle ativo de ruído em 250Hz: a) painel de controle indicando a emissão de ruído no alto-falante de geração, sem controle; b) espectro
sonoro correspondente a (a) medido a 1m da saída do duto.

103
(a)
[ID=1] Médio G1 #24 Hz;(dB[2.000e-05 Pa], POT) 250 60.2
10
15
20
25
30
35
40
45
50
55
60
65
70
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 62.3
Lin* A* (b)
Figura 7.16 – Desempenho do controle ativo de ruído em 250Hz: a) painel de controle indicando o sistema ativo estabilizado; b) espectro sonoro correspondente a (a) medido a
1m da saída do duto.
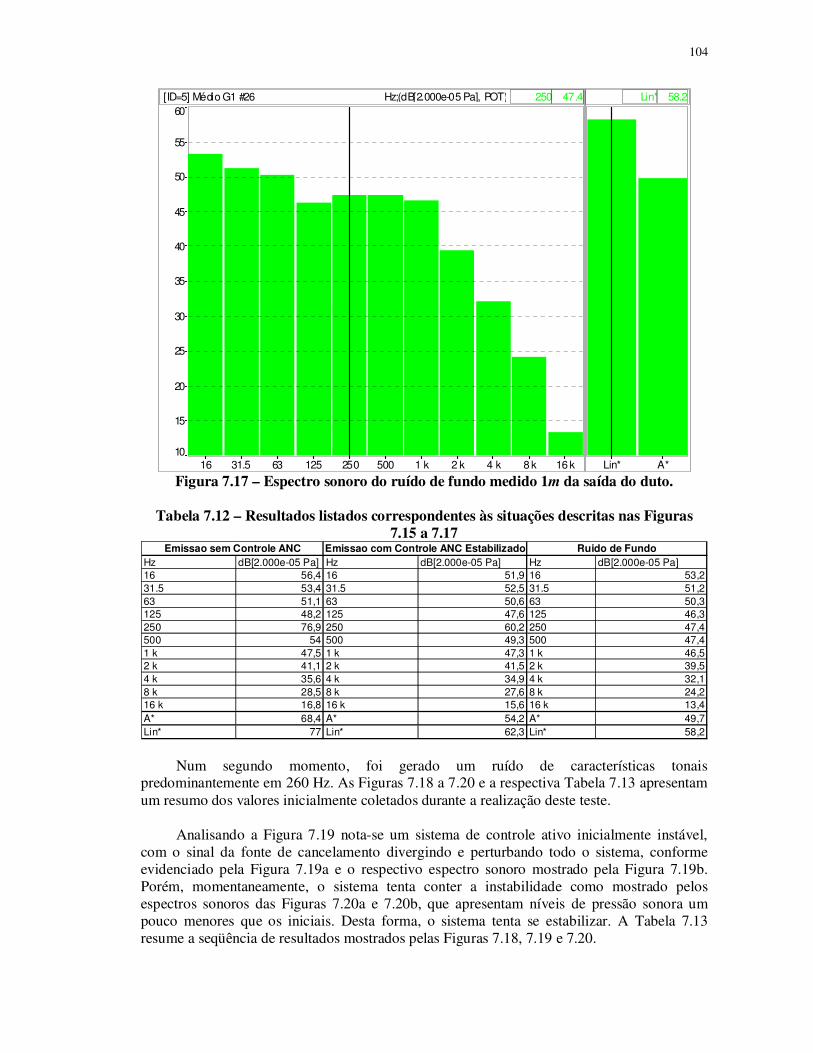
104
[ID=5] Médio G1 #26 Hz;(dB[2.000e-05 Pa], POT) 250 47.4
10
15
20
25
30
35
40
45
50
55
60
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 58.2
Lin* A* Figura 7.17 – Espectro sonoro do ruído de fundo medido 1m da saída do duto.
Tabela 7.12 – Resultados listados correspondentes às situações descritas nas Figuras
7.15 a 7.17
Hz dB[2.000e-05 Pa] Hz dB[2.000e-05 Pa] Hz dB[2.000e-05 Pa]
16 56,4 16 51,9 16 53,2
31.5 53,4 31.5 52,5 31.5 51,2
63 51,1 63 50,6 63 50,3
125 48,2 125 47,6 125 46,3
250 76,9 250 60,2 250 47,4
500 54 500 49,3 500 47,4
1 k 47,5 1 k 47,3 1 k 46,5
2 k 41,1 2 k 41,5 2 k 39,5
4 k 35,6 4 k 34,9 4 k 32,1
8 k 28,5 8 k 27,6 8 k 24,2
16 k 16,8 16 k 15,6 16 k 13,4
A* 68,4 A* 54,2 A* 49,7
Lin* 77 Lin* 62,3 Lin* 58,2
Ruido de FundoEmissao sem Controle ANC Emissao com Controle ANC Estabilizado
Num segundo momento, foi gerado um ruído de características tonais predominantemente em 260 Hz. As Figuras 7.18 a 7.20 e a respectiva Tabela 7.13 apresentam um resumo dos valores inicialmente coletados durante a realização deste teste.
Analisando a Figura 7.19 nota-se um sistema de controle ativo inicialmente instável, com o sinal da fonte de cancelamento divergindo e perturbando todo o sistema, conforme evidenciado pela Figura 7.19a e o respectivo espectro sonoro mostrado pela Figura 7.19b. Porém, momentaneamente, o sistema tenta conter a instabilidade como mostrado pelos espectros sonoros das Figuras 7.20a e 7.20b, que apresentam níveis de pressão sonora um pouco menores que os iniciais. Desta forma, o sistema tenta se estabilizar. A Tabela 7.13 resume a seqüência de resultados mostrados pelas Figuras 7.18, 7.19 e 7.20.
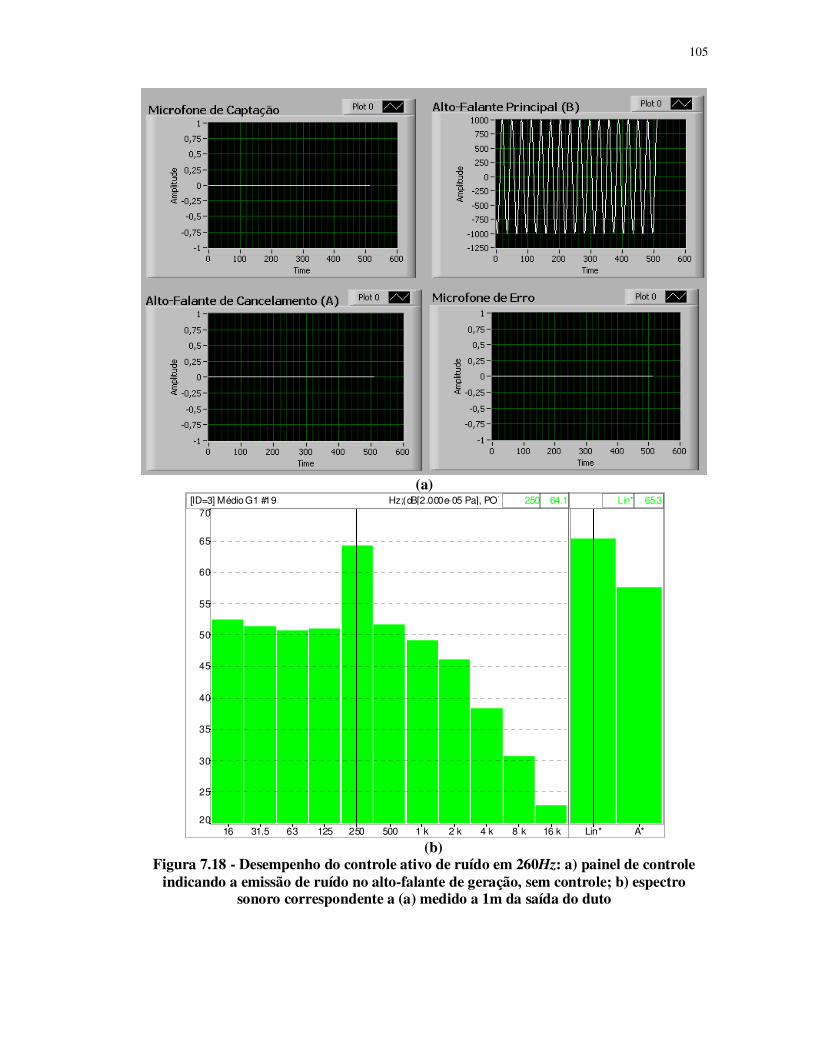
105
(a)
[ID=3] Médio G1 #19 Hz;(dB[2.000e-05 Pa], POT) 250 64.1
20
25
30
35
40
45
50
55
60
65
70
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 65.3
Lin* A* (b)
Figura 7.18 - Desempenho do controle ativo de ruído em 260Hz: a) painel de controle indicando a emissão de ruído no alto-falante de geração, sem controle; b) espectro
sonoro correspondente a (a) medido a 1m da saída do duto
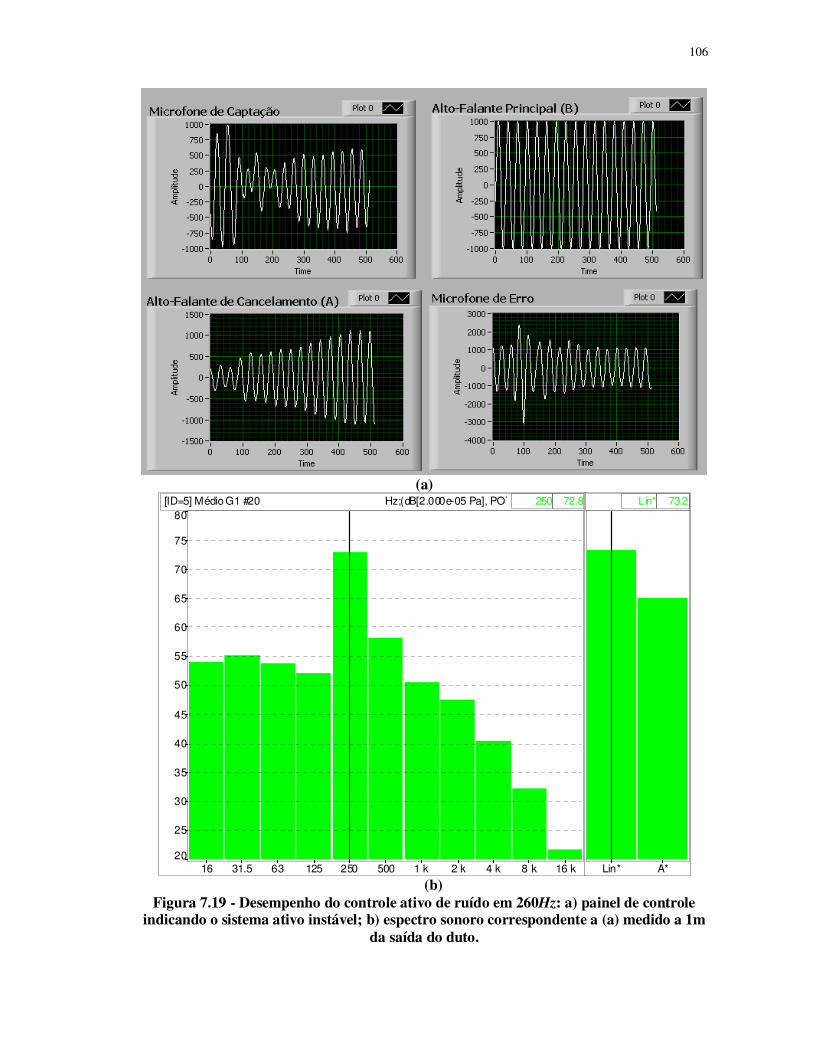
106
(a)
[ID=5] Médio G1 #20 Hz;(dB[2.000e-05 Pa], POT) 250 72.8
20
25
30
35
40
45
50
55
60
65
70
75
80
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 73.2
Lin* A* (b)
Figura 7.19 - Desempenho do controle ativo de ruído em 260Hz: a) painel de controle indicando o sistema ativo instável; b) espectro sonoro correspondente a (a) medido a 1m
da saída do duto.
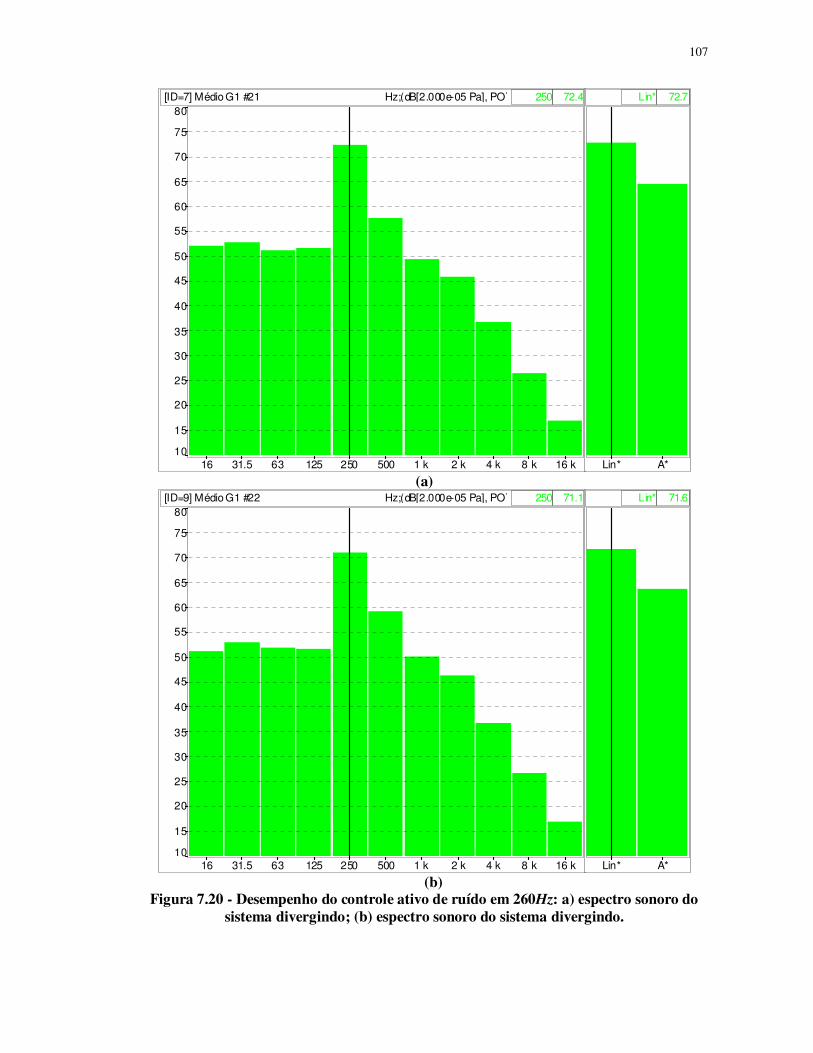
107
[ID=7] Médio G1 #21 Hz;(dB[2.000e-05 Pa], POT) 250 72.4
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 72.7
Lin* A* (a)
[ID=9] Médio G1 #22 Hz;(dB[2.000e-05 Pa], POT) 250 71.1
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 71.6
Lin* A* (b)
Figura 7.20 - Desempenho do controle ativo de ruído em 260Hz: a) espectro sonoro do sistema divergindo; (b) espectro sonoro do sistema divergindo.

108
Tabela 7.13 – Resultados listados correspondentes às situações descritas nas Figura 7.18 a 7.20.
Hz dB[2.000e-05 Pa] Hz dB[2.000e-05 Pa] Hz dB[2.000e-05 Pa] Hz dB[2.000e-05 Pa]
16 52,5 16 53,9 16 52,1 16 51,3
31.5 51,3 31.5 55,1 31.5 52,8 31.5 53,1
63 50,6 63 53,7 63 51,1 63 51,8
125 51,1 125 52 125 51,7 125 51,7
250 64,1 250 72,8 250 72,4 250 71,1
500 51,7 500 58,2 500 57,7 500 59,2
1 k 49 1 k 50,6 1 k 49,4 1 k 50
2 k 46,1 2 k 47,4 2 k 45,9 2 k 46,3
4 k 38,2 4 k 40,4 4 k 36,6 4 k 36,7
8 k 30,6 8 k 32,2 8 k 26,4 8 k 26,7
16 k 22,8 16 k 21,6 16 k 16,8 16 k 16,9
A* 57,5 A* 65 A* 64,5 A* 63,7
Lin* 65,3 Lin* 73,2 Lin* 72,7 Lin* 71,6
Controle ANC divergindoEmissao sem controle ANC Controle ANC divergindo Controle ANC divergindo
Em seguida, são apresentadas a Tabela 7.14 contendo o resumo dos resultados apresentados pelas Figuras 7.21 e 7.22, tendo em vista a seqüência dos testes realizados para a freqüência de 260Hz. Desta forma, a Figura 7.21a e o seu respectivo espectro 7.21b mostram o sistema se desestabilizando totalmente, até o sistema de controle cortar o sinal automaticamente para preservar o alto-falante de cancelamento. A Figura 7.22 apresenta o ruído de fundo medido antes dos testes. Tabela 7.14 - Resultados listados correspondentes às situações descritas nas Figuras 7.21
e 7.22.
Hz dB[2.000e-05 Pa] Hz dB[2.000e-05 Pa]
16 55,3 16 51,3
31.5 52,3 31.5 51,1
63 51,7 63 51,7
125 55,7 125 48,9
250 76,1 250 48,9
500 62,9 500 46,4
1 k 53 1 k 45,4
2 k 47,5 2 k 39,4
4 k 37,5 4 k 32
8 k 27,5 8 k 23,3
16 k 16,7 16 k 13,8
A* 68,3 A* 49,1
Lin* 76,4 Lin* 58,2
Ruido de FundoControle ANC divergindo
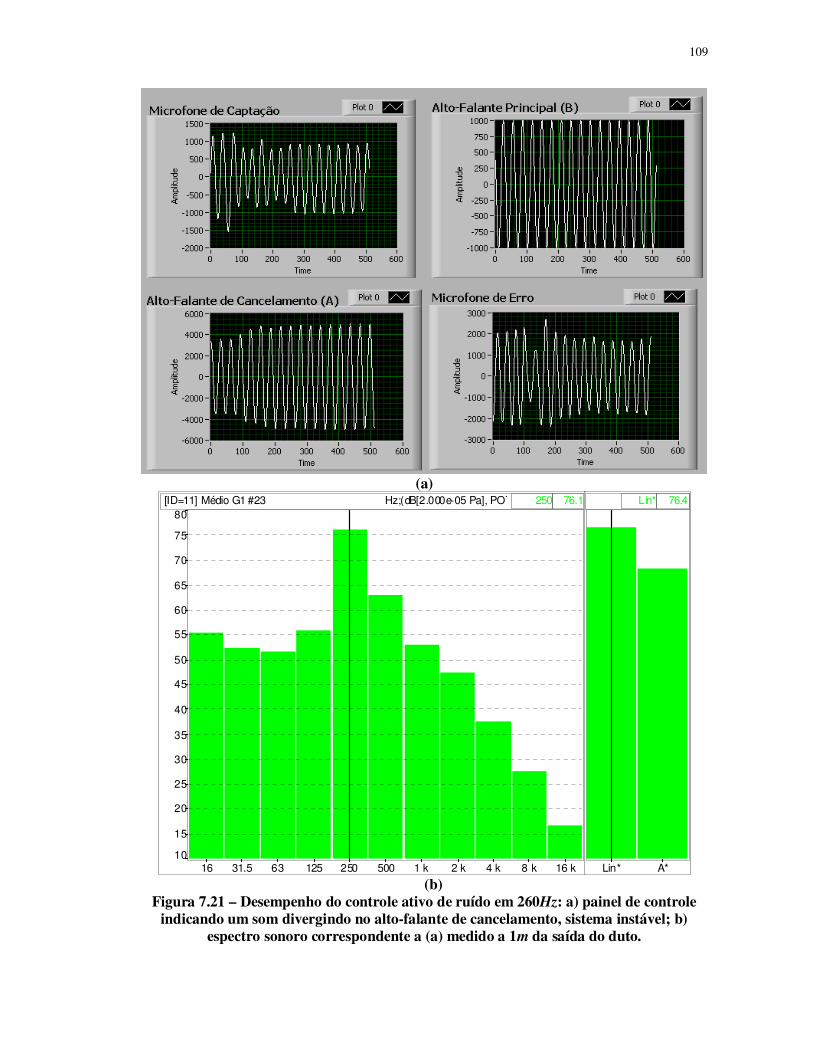
109
(a)
[ID=11] Médio G1 #23 Hz;(dB[2.000e-05 Pa], POT) 250 76.1
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 76.4
Lin* A* (b)
Figura 7.21 – Desempenho do controle ativo de ruído em 260Hz: a) painel de controle indicando um som divergindo no alto-falante de cancelamento, sistema instável; b)
espectro sonoro correspondente a (a) medido a 1m da saída do duto.
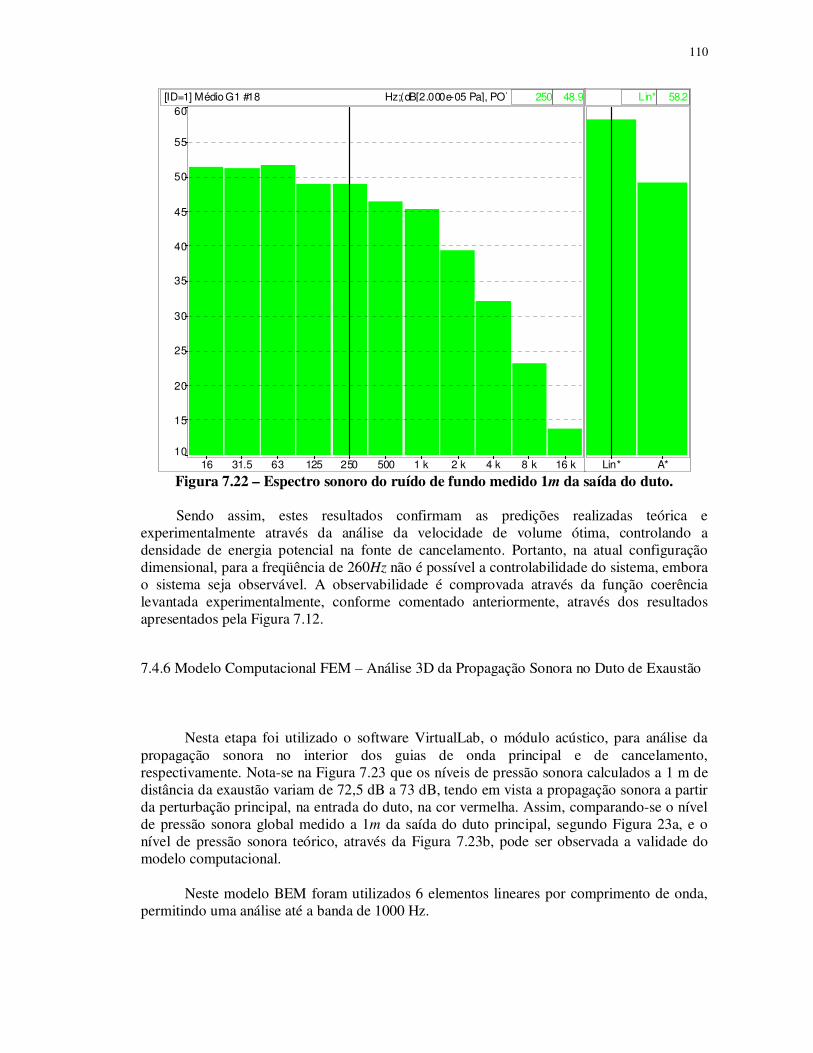
110
[ID=1] Médio G1 #18 Hz;(dB[2.000e-05 Pa], POT) 250 48.9
10
15
20
25
30
35
40
45
50
55
60
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 58.2
Lin* A* Figura 7.22 – Espectro sonoro do ruído de fundo medido 1m da saída do duto.
Sendo assim, estes resultados confirmam as predições realizadas teórica e
experimentalmente através da análise da velocidade de volume ótima, controlando a densidade de energia potencial na fonte de cancelamento. Portanto, na atual configuração dimensional, para a freqüência de 260Hz não é possível a controlabilidade do sistema, embora o sistema seja observável. A observabilidade é comprovada através da função coerência levantada experimentalmente, conforme comentado anteriormente, através dos resultados apresentados pela Figura 7.12.
7.4.6 Modelo Computacional FEM – Análise 3D da Propagação Sonora no Duto de Exaustão
Nesta etapa foi utilizado o software VirtualLab, o módulo acústico, para análise da propagação sonora no interior dos guias de onda principal e de cancelamento, respectivamente. Nota-se na Figura 7.23 que os níveis de pressão sonora calculados a 1 m de distância da exaustão variam de 72,5 dB a 73 dB, tendo em vista a propagação sonora a partir da perturbação principal, na entrada do duto, na cor vermelha. Assim, comparando-se o nível de pressão sonora global medido a 1m da saída do duto principal, segundo Figura 23a, e o nível de pressão sonora teórico, através da Figura 7.23b, pode ser observada a validade do modelo computacional.
Neste modelo BEM foram utilizados 6 elementos lineares por comprimento de onda, permitindo uma análise até a banda de 1000 Hz.
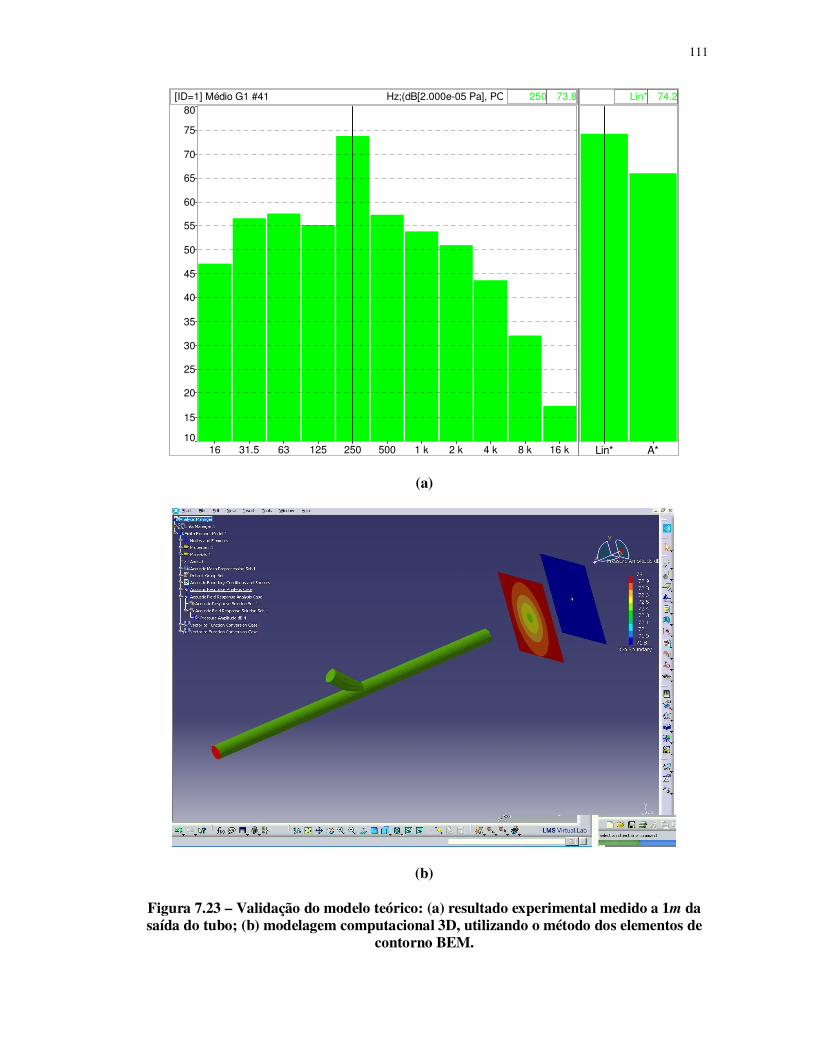
111
[ID=1] Médio G1 #41 Hz;(dB[2.000e-05 Pa], POT) 250 73.8
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
16 31.5 63 125 250 500 1 k 2 k 4 k 8 k 16 k
Lin* 74.2
Lin* A*
(a)
(b)
Figura 7.23 – Validação do modelo teórico: (a) resultado experimental medido a 1m da saída do tubo; (b) modelagem computacional 3D, utilizando o método dos elementos de
contorno BEM.

112
O objetivo desta análise foi validar o modelo teórico da planta experimental, tendo em vista uma maior confiabilidade para a análise dos modos acústicos no duto de exaustão, conforme será apresentado a seguir.
7.4.7 Modelo Computacional BEM – Análise 3D dos Modos Acústicos no Duto de Exaustão
Nesta etapa foi utilizado o software VirtualLab para a análise dos modos acústicos no
interior dos guias de onda principal e de cancelamento, respectivamente. Nota-se na Figura 7.24 que os níveis de pressão sonora, no interior do duto são homogêneos em cada seção transversal, o que caracteriza a onda plana. Como podem ser notados, os maiores níveis de pressão sonora encontram-se à montante do guia de ondas de cancelamento. Pode ser verificado que o guia de onda de cancelamento encontra-se posicionado em uma região de menor pressão sonora, logo, de menor impedância. Também, podem ser verificados os pontos de anti-ressonância, de menor energia no sistema, conforme sinalizado na figura. Sendo assim, esta análise permitiu a definição de um melhor posicionamento do guia de onda de cancelamento ao longo do duto principal, tendo em vista a distribuição de energia sonora dentro do guia de onda principal. Com isso, as regiões de maior pressão sonora são evitadas para a instalação do guia de cancelamento, o que permite a utilização de menor potência sonora no alto-falante de cancelamento. Também, através desta análise teórica podem ser observadas as regiões de anti-ressonância, que se caracterizam por baixos níveis de pressão sonora. Sendo assim, estes pontos de anti-ressonância devem ser evitados em relação ao posicionamento dos sensores de captação e de erro. Desta forma, a análise 3D dos modos acústicos auxilia na definição da estratégia de controle, pois permite um posicionamento fisicamente mais coerente tanto dos microfones quanto do atuador que compõem o sistema de controle ativo, bem como permite o conhecimento do tipo de propagação sonora no interior do duto principal, caracterizando-a como uni ou bidimensional.
Figura 7.24 - Modelagem computacional 3D, utilizando o método dos elementos finitos FEM.
Região de anti-ressonância
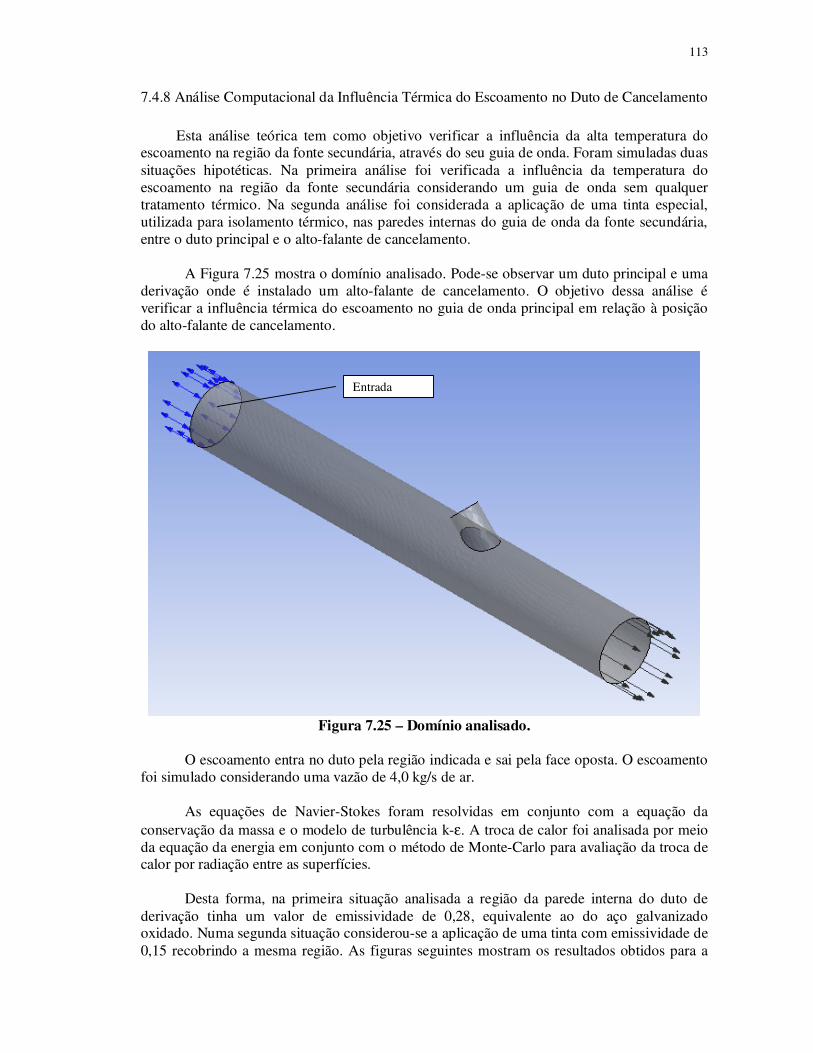
113
7.4.8 Análise Computacional da Influência Térmica do Escoamento no Duto de Cancelamento
Esta análise teórica tem como objetivo verificar a influência da alta temperatura do escoamento na região da fonte secundária, através do seu guia de onda. Foram simuladas duas situações hipotéticas. Na primeira análise foi verificada a influência da temperatura do escoamento na região da fonte secundária considerando um guia de onda sem qualquer tratamento térmico. Na segunda análise foi considerada a aplicação de uma tinta especial, utilizada para isolamento térmico, nas paredes internas do guia de onda da fonte secundária, entre o duto principal e o alto-falante de cancelamento.
A Figura 7.25 mostra o domínio analisado. Pode-se observar um duto principal e uma derivação onde é instalado um alto-falante de cancelamento. O objetivo dessa análise é verificar a influência térmica do escoamento no guia de onda principal em relação à posição do alto-falante de cancelamento.
Figura 7.25 – Domínio analisado.
O escoamento entra no duto pela região indicada e sai pela face oposta. O escoamento
foi simulado considerando uma vazão de 4,0 kg/s de ar.
As equações de Navier-Stokes foram resolvidas em conjunto com a equação da conservação da massa e o modelo de turbulência k-ε. A troca de calor foi analisada por meio da equação da energia em conjunto com o método de Monte-Carlo para avaliação da troca de calor por radiação entre as superfícies.
Desta forma, na primeira situação analisada a região da parede interna do duto de
derivação tinha um valor de emissividade de 0,28, equivalente ao do aço galvanizado oxidado. Numa segunda situação considerou-se a aplicação de uma tinta com emissividade de 0,15 recobrindo a mesma região. As figuras seguintes mostram os resultados obtidos para a
Entrada
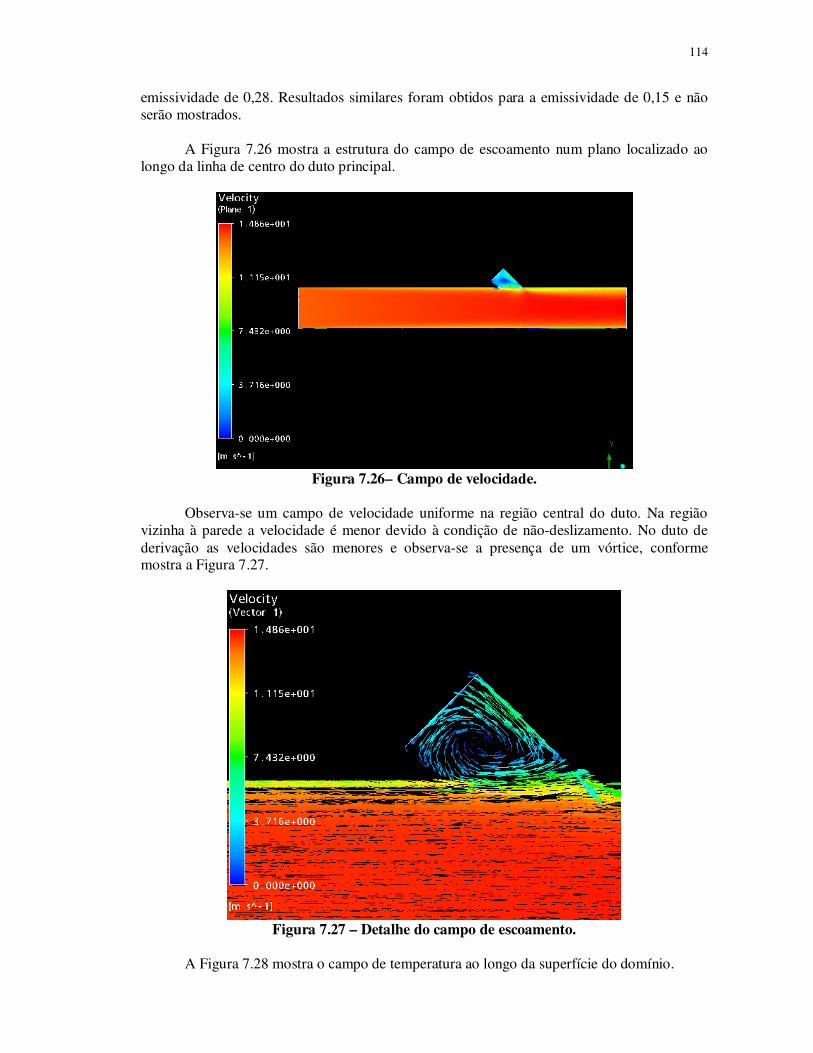
114
emissividade de 0,28. Resultados similares foram obtidos para a emissividade de 0,15 e não serão mostrados.
A Figura 7.26 mostra a estrutura do campo de escoamento num plano localizado ao longo da linha de centro do duto principal.
Figura 7.26– Campo de velocidade.
Observa-se um campo de velocidade uniforme na região central do duto. Na região
vizinha à parede a velocidade é menor devido à condição de não-deslizamento. No duto de derivação as velocidades são menores e observa-se a presença de um vórtice, conforme mostra a Figura 7.27.
Figura 7.27 – Detalhe do campo de escoamento.
A Figura 7.28 mostra o campo de temperatura ao longo da superfície do domínio.

115
Figura 7.28 – Campo de temperatura ao longo da superfície da tubulação
A montante nota-se uma distribuição bastante uniforme na faixa de 534K. Na
derivação observa-se uma variação da distribuição de temperatura menos uniforme. A Figura 7.29 mostra um detalhe do campo de temperatura na superfície da derivação.
Figura 7.29 – Detalhe da distribuição de temperatura na derivação
A Tabela 7.15 resume os resultados obtidos nas duas simulações. Como critérios de
comparação foram considerados as temperaturas médias na superfície do alto-falante e da parede da derivação.
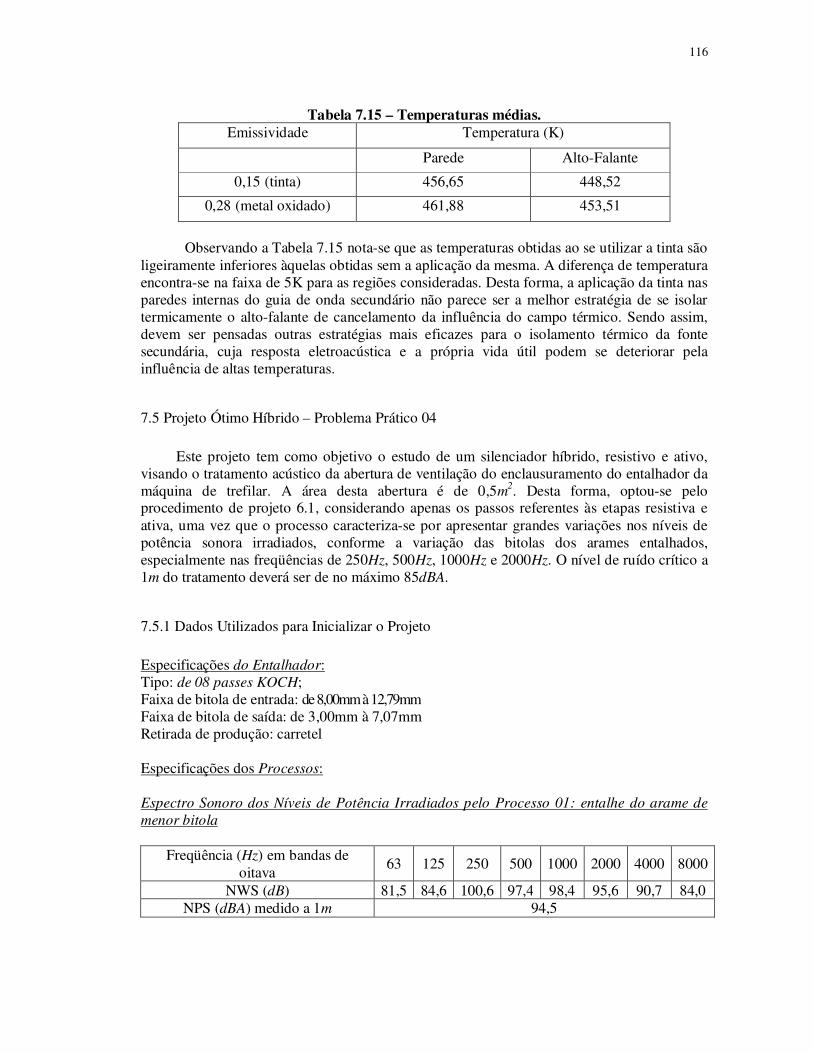
116
Tabela 7.15 – Temperaturas médias.
Emissividade Temperatura (K)
Parede Alto-Falante
0,15 (tinta) 456,65 448,52
0,28 (metal oxidado) 461,88 453,51
Observando a Tabela 7.15 nota-se que as temperaturas obtidas ao se utilizar a tinta são
ligeiramente inferiores àquelas obtidas sem a aplicação da mesma. A diferença de temperatura encontra-se na faixa de 5K para as regiões consideradas. Desta forma, a aplicação da tinta nas paredes internas do guia de onda secundário não parece ser a melhor estratégia de se isolar termicamente o alto-falante de cancelamento da influência do campo térmico. Sendo assim, devem ser pensadas outras estratégias mais eficazes para o isolamento térmico da fonte secundária, cuja resposta eletroacústica e a própria vida útil podem se deteriorar pela influência de altas temperaturas.
7.5 Projeto Ótimo Híbrido – Problema Prático 04
Este projeto tem como objetivo o estudo de um silenciador híbrido, resistivo e ativo,
visando o tratamento acústico da abertura de ventilação do enclausuramento do entalhador da máquina de trefilar. A área desta abertura é de 0,5m2. Desta forma, optou-se pelo procedimento de projeto 6.1, considerando apenas os passos referentes às etapas resistiva e ativa, uma vez que o processo caracteriza-se por apresentar grandes variações nos níveis de potência sonora irradiados, conforme a variação das bitolas dos arames entalhados, especialmente nas freqüências de 250Hz, 500Hz, 1000Hz e 2000Hz. O nível de ruído crítico a 1m do tratamento deverá ser de no máximo 85dBA.
7.5.1 Dados Utilizados para Inicializar o Projeto
Especificações do Entalhador: Tipo: de 08 passes KOCH; Faixa de bitola de entrada: de 8,00mm à 12,79mm Faixa de bitola de saída: de 3,00mm à 7,07mm Retirada de produção: carretel Especificações dos Processos: Espectro Sonoro dos Níveis de Potência Irradiados pelo Processo 01: entalhe do arame de menor bitola
Freqüência (Hz) em bandas de oitava
63 125 250 500 1000 2000 4000 8000
NWS (dB) 81,5 84,6 100,6 97,4 98,4 95,6 90,7 84,0 NPS (dBA) medido a 1m 94,5
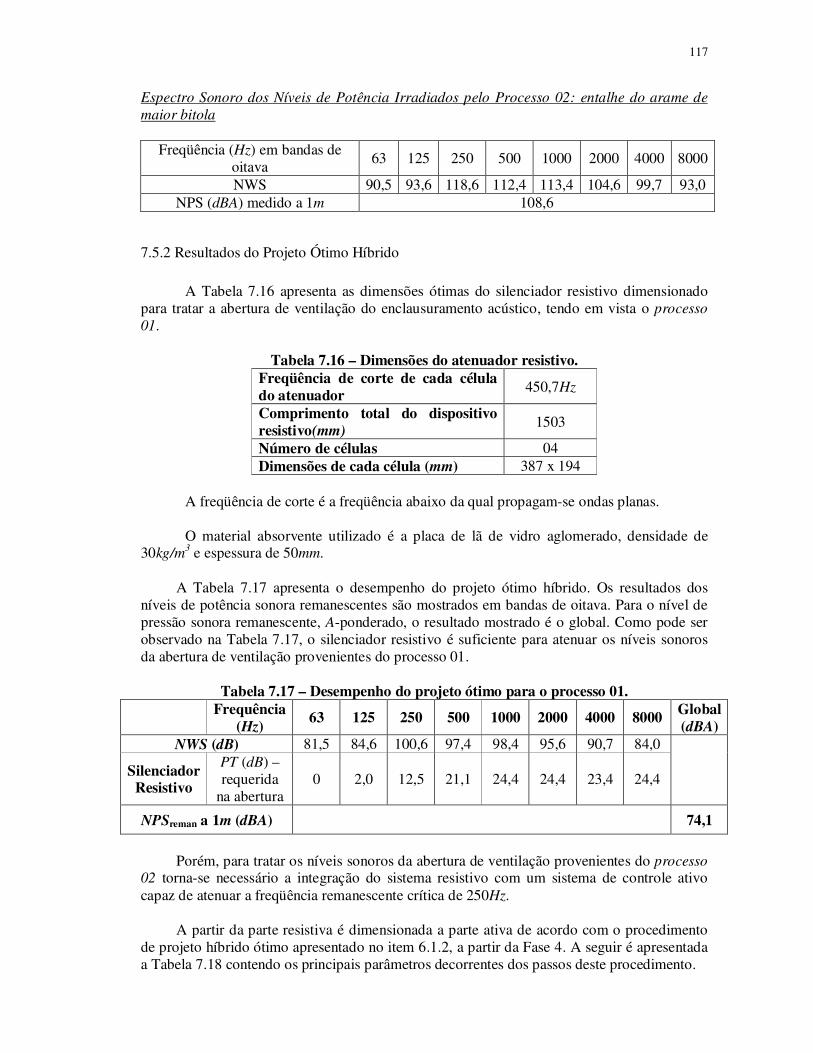
117
Espectro Sonoro dos Níveis de Potência Irradiados pelo Processo 02: entalhe do arame de maior bitola
Freqüência (Hz) em bandas de oitava
63 125 250 500 1000 2000 4000 8000
NWS 90,5 93,6 118,6 112,4 113,4 104,6 99,7 93,0 NPS (dBA) medido a 1m 108,6
7.5.2 Resultados do Projeto Ótimo Híbrido
A Tabela 7.16 apresenta as dimensões ótimas do silenciador resistivo dimensionado
para tratar a abertura de ventilação do enclausuramento acústico, tendo em vista o processo 01.
Tabela 7.16 – Dimensões do atenuador resistivo.
Freqüência de corte de cada célula do atenuador 450,7Hz
Comprimento total do dispositivo resistivo(mm)
1503
Número de células 04 Dimensões de cada célula (mm) 387 x 194
A freqüência de corte é a freqüência abaixo da qual propagam-se ondas planas. O material absorvente utilizado é a placa de lã de vidro aglomerado, densidade de
30kg/m3 e espessura de 50mm.
A Tabela 7.17 apresenta o desempenho do projeto ótimo híbrido. Os resultados dos níveis de potência sonora remanescentes são mostrados em bandas de oitava. Para o nível de pressão sonora remanescente, A-ponderado, o resultado mostrado é o global. Como pode ser observado na Tabela 7.17, o silenciador resistivo é suficiente para atenuar os níveis sonoros da abertura de ventilação provenientes do processo 01.
Tabela 7.17 – Desempenho do projeto ótimo para o processo 01.
Frequência (Hz)
63 125 250 500 1000 2000 4000 8000 Global (dBA)
NWS (dB) 81,5 84,6 100,6 97,4 98,4 95,6 90,7 84,0
Silenciador Resistivo
PT (dB) – requerida
na abertura 0 2,0 12,5 21,1 24,4 24,4 23,4 24,4
NPSreman a 1m (dBA) 74,1
Porém, para tratar os níveis sonoros da abertura de ventilação provenientes do processo
02 torna-se necessário a integração do sistema resistivo com um sistema de controle ativo capaz de atenuar a freqüência remanescente crítica de 250Hz.
A partir da parte resistiva é dimensionada a parte ativa de acordo com o procedimento
de projeto híbrido ótimo apresentado no item 6.1.2, a partir da Fase 4. A seguir é apresentada a Tabela 7.18 contendo os principais parâmetros decorrentes dos passos deste procedimento.
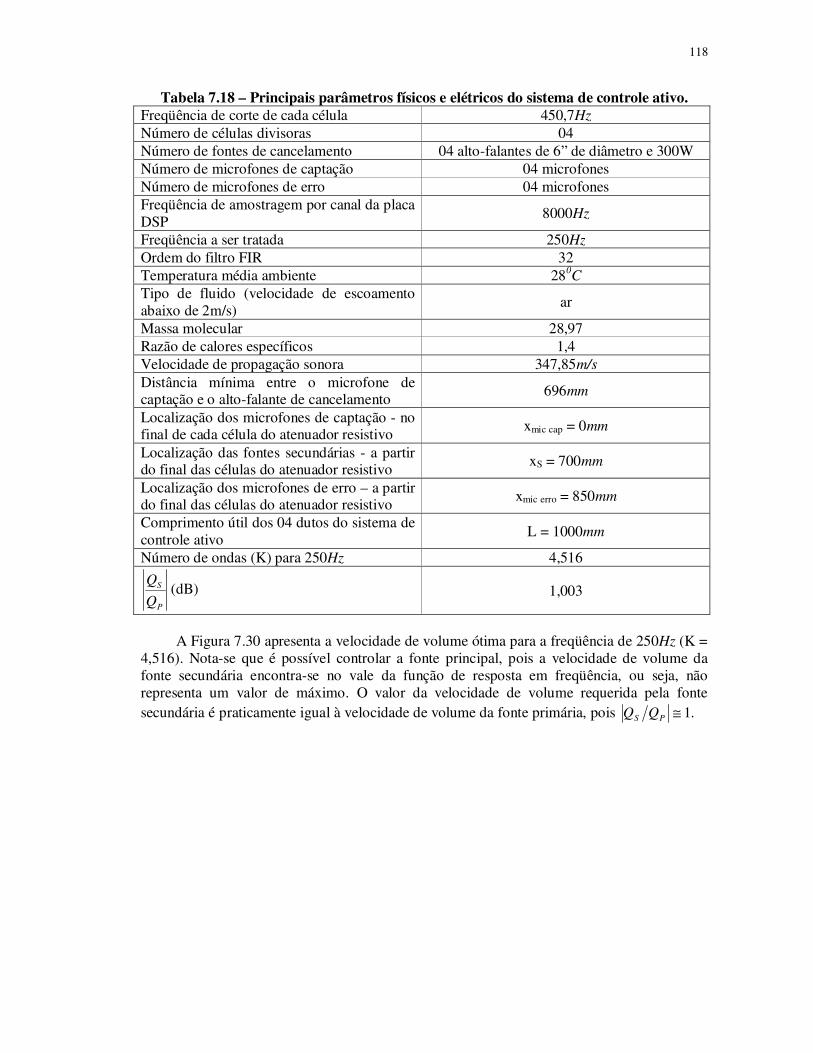
118
Tabela 7.18 – Principais parâmetros físicos e elétricos do sistema de controle ativo. Freqüência de corte de cada célula 450,7Hz Número de células divisoras 04 Número de fontes de cancelamento 04 alto-falantes de 6” de diâmetro e 300W Número de microfones de captação 04 microfones Número de microfones de erro 04 microfones Freqüência de amostragem por canal da placa DSP
8000Hz
Freqüência a ser tratada 250Hz Ordem do filtro FIR 32 Temperatura média ambiente 280C Tipo de fluido (velocidade de escoamento abaixo de 2m/s)
ar
Massa molecular 28,97 Razão de calores específicos 1,4 Velocidade de propagação sonora 347,85m/s Distância mínima entre o microfone de captação e o alto-falante de cancelamento
696mm
Localização dos microfones de captação - no final de cada célula do atenuador resistivo
xmic cap = 0mm
Localização das fontes secundárias - a partir do final das células do atenuador resistivo
xS = 700mm
Localização dos microfones de erro – a partir do final das células do atenuador resistivo
xmic erro = 850mm
Comprimento útil dos 04 dutos do sistema de controle ativo L = 1000mm
Número de ondas (K) para 250Hz 4,516
P
S
Q
Q(dB) 1,003
A Figura 7.30 apresenta a velocidade de volume ótima para a freqüência de 250Hz (K =
4,516). Nota-se que é possível controlar a fonte principal, pois a velocidade de volume da fonte secundária encontra-se no vale da função de resposta em freqüência, ou seja, não representa um valor de máximo. O valor da velocidade de volume requerida pela fonte secundária é praticamente igual à velocidade de volume da fonte primária, pois .QQ PS 1≅
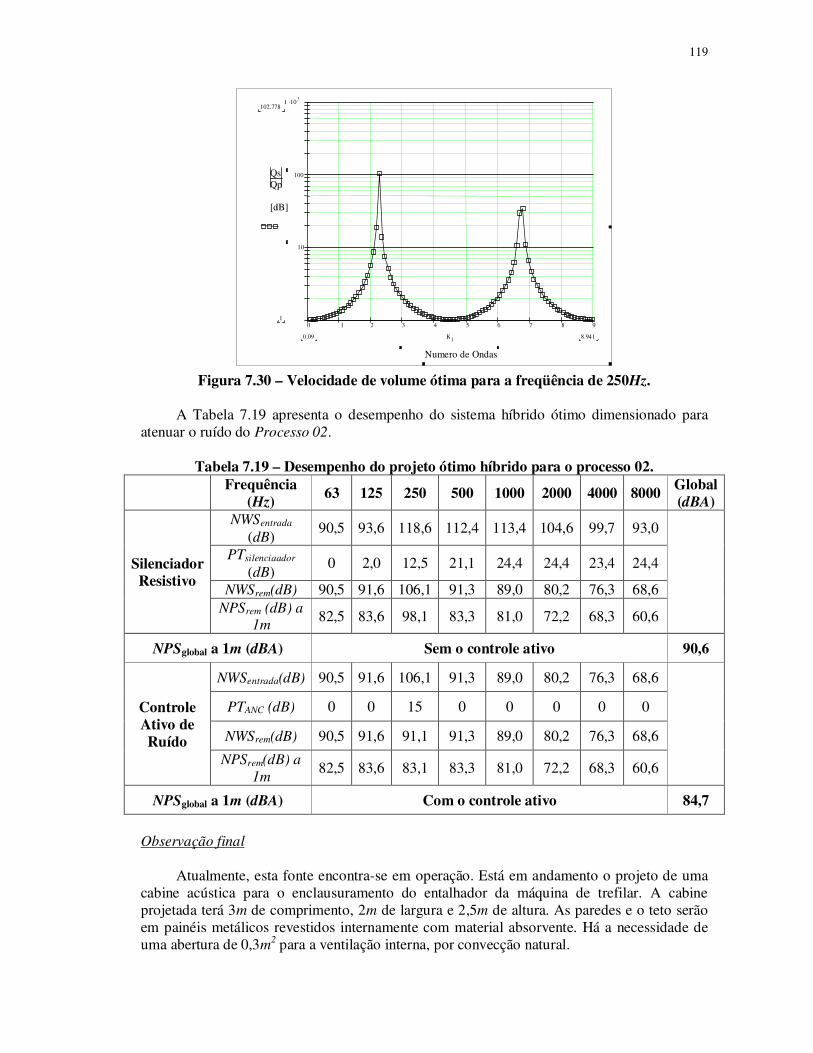
119
Figura 7.30 – Velocidade de volume ótima para a freqüência de 250Hz.
A Tabela 7.19 apresenta o desempenho do sistema híbrido ótimo dimensionado para
atenuar o ruído do Processo 02.
Tabela 7.19 – Desempenho do projeto ótimo híbrido para o processo 02.
Frequência (Hz) 63 125 250 500 1000 2000 4000 8000 Global
(dBA)
Silenciador Resistivo
NWSentrada (dB)
90,5 93,6 118,6 112,4 113,4 104,6 99,7 93,0
PTsilenciaador
(dB) 0 2,0 12,5 21,1 24,4 24,4 23,4 24,4
NWSrem(dB) 90,5 91,6 106,1 91,3 89,0 80,2 76,3 68,6 NPSrem (dB) a
1m 82,5 83,6 98,1 83,3 81,0 72,2 68,3 60,6
NPSglobal a 1m (dBA) Sem o controle ativo 90,6
Controle Ativo de Ruído
NWSentrada(dB) 90,5 91,6 106,1 91,3 89,0 80,2 76,3 68,6
PTANC (dB) 0 0 15 0 0 0 0 0
NWSrem(dB) 90,5 91,6 91,1 91,3 89,0 80,2 76,3 68,6
NPSrem(dB) a 1m
82,5 83,6 83,1 83,3 81,0 72,2 68,3 60,6
NPSglobal a 1m (dBA) Com o controle ativo 84,7
Observação final
Atualmente, esta fonte encontra-se em operação. Está em andamento o projeto de uma cabine acústica para o enclausuramento do entalhador da máquina de trefilar. A cabine projetada terá 3m de comprimento, 2m de largura e 2,5m de altura. As paredes e o teto serão em painéis metálicos revestidos internamente com material absorvente. Há a necessidade de uma abertura de 0,3m2 para a ventilação interna, por convecção natural.
0 1 2 3 4 5 6 7 8 9
10
100
1 . 103
Numero de Ondas
[dB]
102.778
1
Qs
j
Qp
8.941 0.09 K j
120
8 CONCLUSÃO 8.1 Comentários Finais Para finalizar o presente trabalho, considere os seguintes comentários: Quanto ao controle ativo de ruído em avanço i) Para a planta experimental testada, conforme os resultados apresentados no Capítulo 7, o controle ativo de ruído, utilizando o algoritmo FXLMS no domínio do tempo discreto, mostrou-se promissor para aplicações em dutos industriais, pois foram atingidos excelentes níveis de atenuação sonora em baixa freqüência. Aparentemente, com hardwares apropriados deve ser possível efetuar o controle ativo também para freqüências mais elevadas (provavelmente até 500Hz). ii) Durante os testes experimentais observou-se instabilidade do sistema de controle ativo quando o microfone de captação está exposto à realimentação sonora proveniente do atuador de cancelamento. Para eliminar a instabilidade do sistema provocada pela realimentação foi desenvolvida uma caixa acústica especial, tripartida. Este dispositivo possibilitou a minimização da influência da realimentação sonora do alto-falante de cancelamento para o microfone de captação, estabilizando o sistema, que passou a funcionar satisfatoriamente ao longo de um dia inteiro de testes ininterruptos. Trata-se, assim, de uma contribuição tecnológica do presente estudo. iii) Como comentado no Capítulo 3, para perturbações aleatórias ou ruídos transitórios, deve ser respeitada uma distância mínima entre a posição da fonte de cancelamento e do microfone de captação (Kuo e Morgan, 1996). De fato, respeitar uma distância mínima garante a causalidade do sistema, uma vez que o atraso acústico passa a ser maior ou igual ao atraso total do sistema eletroacústico. Assim, o número de operadores do filtro adaptativo, a freqüência de amostragem por canal da placa de controle e a velocidade de propagação sonora são fatores fundamentais neste cálculo. iv) Considerando uma fonte principal, uma fonte secundária e um duto unidimensional, para ruídos periódicos, a análise da velocidade de volume ótima, controlando a densidade de energia potencial na fonte secundária, é uma ferramenta fundamental para a determinação das freqüências possíveis de serem canceladas. Para isso, é preciso levar em conta a distância entre as fontes primária e secundária, como demonstrado nos testes realizados. Na planta utilizada a distância entre a fonte principal e a fonte secundária é de aproximadamente 1650mm. Nestas condições, a freqüência ideal a ser controle é de 205Hz, pois a velocidade de volume ótima encontra-se no menor nível, conforme Figura 7.10. Sendo assim, esta técnica permite predizer a controlabilidade do sistema para determinadas freqüências de interesse. v) O cálculo de uma distância mínima entre o microfone de captação e o alto-falante de cancelamento pode ser utilizado como um dado de entrada para a análise da distância ótima entre a fonte principal e a de cancelamento, utilizando a técnica de análise da velocidade de volume ótima, conforme mostrado na solução do problema prático 04. vi) Como já comentado no Capítulo 5, a função coerência, calculada a partir das medições entre os sensores de captação (entrada) e de erro (saída) é efetiva para evidenciar a observabilidade do sistema.
121
vii) Pode-se afirmar que o desenvolvimento de uma planta experimental para o controle ativo de ruído em duto foi importante para uma aplicação prática dos conceitos físicos e matemáticos necessários à elaboração de um procedimento de projeto. Quanto ao controle de ruído em dutos de exaustão através de sistemas híbridos otimizados viii) Conforme já comentado no item 7.1, o projeto híbrido mostrou-se técnica e economicamente mais vantajoso. Tecnicamente, pela maior facilidade de fabricação e pela maior durabilidade, especialmente dos ressonadores de Helmholtz em relação ao sistema resistivo, que sofre degradação do material absorvente. Economicamente, pela racionalização de materiais e pelo menor custo de manutenção em longo prazo, tendo em vista as características construtivas dos ressonadores. Também, o custo de movimentação de carga em relação à solução original passa a ser menor, pois o sistema é montado no duto que interliga o exaustor à chaminé, próximos do piso zero. Para efeito de comparação, o silenciador atualmente em operação (Problema 01) encontra-se instalado a 50m de altura em relação ao piso zero e pesa aproximadamente 7000kgf, o que gera um custo alto de movimentação de carga. Desta forma, para efetivar todas as vantagens demonstradas é fundamental que o procedimento proposto seja aplicado pelos engenheiros projetistas responsáveis ainda na fase do projeto mecânico do sistema de exaustão. ix) Conforme já comentado no item 7.3, a solução híbrida aplicada ao motor a Diesel estacionário (Problema 03) mostrou-se 11,1% mais leve do que a solução convencional atualmente adotada, que leva em conta apenas os pesos do costado e do duto de ligação entre as câmaras. Assim, soluções híbridas parecem encorajadoras para este tipo de sistema. x) Ao se considerar os exemplos práticos apresentados, como um todo, pode-se concluir que a metodologia de projeto híbrido através da aplicação combinada das técnicas de controle de ruído em dutos, passivas e ativa, permite obter sistemas de controle de ruído tecnicamente e economicamente mais vantajosos. 8.2 Conclusões Com relação ao presente trabalho de pesquisa, podem-se tirar como principais conclusões: Quanto ao controle ativo de ruído em avanço i) Visando reduzir o efeito da realimentação proveniente da fonte de cancelamento no
microfone de captação de sistemas de controle ativo em avanço, elaborou-se uma solução tecnológica inovadora, no caso do tipo câmara tripartida.
ii) A técnica de análise baseada no cálculo da velocidade de volume ótima, controlando a
densidade de energia potencial na fonte de cancelamento, mostrou-se efetiva para o projeto de sistemas de controle ativo em dutos unidimensionais, sujeitos a um ruído periódico com características tonais, garantindo a controlabilidade do sistema.
iii) Conforme indicado pela literatura, a utilização da função coerência é, de fato, uma
técnica efetiva para garantir a observabilidade entre os sensores do sistema (conforme resultados apresentados nos itens 7.4.4 e 7.4.5).
122
iv) Para a planta experimental testada, desde que devidamente calculadas as posições dos sensores e atuadores, o algoritmo de controle ativo em avanço (FXLMS) é efetivo para controlar ruídos periódicos tonais.
Quanto ao procedimento de projeto híbrido v) Apresentou-se um procedimento de projeto de sistemas híbridos aplicável na atenuação
de ruídos de banda larga normalizados, entre 31,5Hz e 8000Hz. vi) Trata-se de uma metodologia modular, apta à inclusão de novos modelos teóricos ou
empíricos, de novos dispositivos de controle passivo ou de outras estratégias de controle ativo.
vii) Embora direcionada ao ambiente industrial, a metodologia desenvolvida é perfeitamente
aplicável a ruídos não industriais, tais como motores automotivos. viii) Os projetos desenvolvidos para a solução de três problemas práticos mostraram-se
superiores técnica e economicamente às soluções adotadas pelas indústrias nacionais. Desta forma, o procedimento de projeto ótimo híbrido mostra-se promissor para aplicações em dutos industriais.
8.3 Sugestões para Trabalhos Futuros Com relação à continuidade do presente estudo pode-se sugerir: i) Para transformar este primeiro protótipo construído em laboratório em uma alternativa que seja viável técnica e economicamente, tendo em vista um caráter industrial, há necessidade de se concluir mais algumas etapas de engenharia. Tais etapas referem-se à customização do sistema eletrônico, desenvolvimento de caixas acústicas e alto-falantes resistentes às temperaturas de exaustão, em torno de 5000C, desenvolvimento e fabricação de dispositivos que minimizem o ruído do escoamento nos sensores. O objetivo é transformar o protótipo em uma tecnologia embarcada, dimensionada para suportar as intempéries do meio. ii) Implementar outras estratégias de filtragem adaptativa, utilizando os algoritmos LMS modificados, conforme descritos no Apêndice A, com o intuito de se comparar a velocidade de convergência e o desempenho do sistema para atenuar sinais multitonais. iii) Utilizar uma controladora FPGA, com uma capacidade de processamento superior ao da controladora DSP utilizada, visando ampliar a faixa de freqüências a ser controlada e o número de canais. iv) Levantar curvas de desempenho de sistemas híbridos experimentais, tendo em vista a validação e/ou correção dos modelos teóricos e empíricos utilizados para o dimensionamento ótimo de silenciadores resistivos e reativos.

123
REFERÊNCIAS BIBLIOGRÁFICAS Alfredson, J., Davies, P., O., A., L., 1971, “Performance of Exhaust Silencer Components”,
Journal of Sound and Vibration, Vol. 39, No. 1, pp. 105-119. Bao, C., Sas, P., Brussel, H.V., 1993, “Comparison of Two Online Identification Algorithms
for Active Noise Control”, Proceedings of the Resent Advances in Active Control of Sound and Vibration, Technomic, Lancaster, PA, pp. 38-51.
Barron, R.F., 2003, “Industrial Noise Control and Acoustics”, Editora Marcel Dekker, Inc., New York, U.S.A.
Beranek, L.L., 1996, “Acoustics”, Publicado pela Acoustical Society of America através do American Institute of Physics, New York.
Beranek, L.L., Vér, I.L., 1992, “Noise and Vibration Control Engineering – Princípios e Aplicação”, Publicado por John Wiley & Sons, INC.
Bistafa, S.R., 2006, “Acústica Aplicada ao Controle de Ruído”, Editora Edgard Blücher Ltda, 1a Edição.
Boylestad, R.L., 2004, “Introdução à Análise de Circuitos”, Editora Prentice Hall, 10a Edição. Burgess, J.C., 1981, “Active Adaptive Sound Control in a Duct: A Computer Simulation”,
Journal of the Acoustic Society of America, Vol. 70, No. 3, pp. 715-726. Cabell, R.H., Fuller, C.R., 1999, “A Principal Component Algorithm for Feedforward Active
Noise and Vibration Control”. Journal of Sound and Vibration, Vol. 227, No. 1, pp. 159-181.
Chen, K.T., Chen, Y.N., Chen, W., Liu, Y.H., 1998, “Adaptive Active Control on the Acoustics Transmission of the Acoustic Sources in Aperture at Low Frequencies”, Applied Acoustics, Vol. 54, No. 2, pp. 141-164.
Chen, K.T., Liu, Y.H., 2000, “A Physical Insight of the Active Control on Sound Source in a Pipe”, Applied Acoustics, Vol. 61, No. 1, pp.133-148.
Chen, S.R, Too, G.-P.J., 2009, “Simulations and Experiments for Hybrid Noise Control Systems”, Applied Acoustics, Vol. 70, No. 1, pp. 247-255.
Costa, E.C., 2003, “Acústica Técnica”, Editora Edgard Blücher Ltda., 1a Edição. Cremer, L., 1953, “Theory of Attenuation of Airborne Sound in a Rectangular Duct with
Sound-absorbing Walls and Maximum Achievable Attenuation”, Acustica (em Alemao), Vol. 3, pp. 249-263.
Cuesta, M., Cobo, P., 2000, “Active Control of the Exhaust Noise Radiated by an Enclosed Generator”, Applied Acoustics, Vol. 61, pp. 83-94.
Davis, D.D., Stokes, G.M., Moore, D., Stevens, G.L., 1954, “Theoretical and Experimental Investigation of Mufflers with Comments on Engine-Exhaust Muffler Design”, NACA Report 1192.
Diego, M., Gonzalez, A., Ferrer, M., 2004, “Multichannel Active NOise Control System for Local Spectral Reshaping of Multifrequency Noise”, Journal of Sound and Vibration, Vol. 274, pp. 249-271.
Donadon, L.V., 2002, “Análise Teórica e Experimental de Estratégias de Controle Ativo de Ruído”, Tese de Doutorado, Universidade Estadual de Campinas, Faculdade de Engenharia Mecânica.
Donadon, L.V., Arruda, J.R.F., 2003, “Energetic Analyses of an Actively Controlled One-Dimensional Acoustic Waveguide”, Applied Acoustics, 64, pp. 243-268.
Donadon, L.V., Arruda, J.R.F., 2005, “Experimental Energetic Analyses of an Actively Controlled One-Dimensional Acoustic Waveguide”, Journal of Sound and Vibration, Vol. 280(1), pp. 159-179.
124
Elliott, S.J., Stothers, I.M., Nelson, P.A., 1987, “A Multiple Error LMS Algorithm and Its Application to the Active Control of Sound and Vibration”. IEEE Transaction on Acoustics, Speech, and Signal Processing, Vol. ASSP-35, No. 10, pp.1423-1434.
Elliott, S. J., Nelson, P. A., 1992, “Active Control of Sound”, London: Academic Press. Elliott, S.J., Nelson, P.A., 1993, “Active Noise Control”, IEEE Signal Process Magazine, Vol.
10, pp. 12-35. Elliott, S.J., 2001, “Signal Processing for Active Noise Control”, Academic Press, New York. Eriksson, L.J., 1991, “Development of the Filtered-U Algorithm for Active Noise Control”,
Journal of the Acoustical Society of American, Vol. 89(1), pp. 857-865. Friot, E., 2006, “Infinite Non-Causality in Active Cancellation of Random Noise”, Journal of
Sound and Vibration, Vol. 290, pp. 597-618. Fukuda, M., Okuda, J., 1970, “A Study on Characteristics of Cavity-Type Mufflers”, Japanese
Soc. of Mechanical Engineers, 13(55), pp. 96-104. Gerges, S.N.Y., 1992, “Ruido – Fundamentos e Controle”, Impresso na Imprensa
Universitária da Universidade Federal de Santa Catarina, Florianópolis, Santa Catarina, Brasil.
Hansen, C.H., Snyder, S.D., 1997, “Active Control of Noise and Vibration”, E&FN Spon, London, 1997.
Haykin, S., 1996, “Adaptive FilterTheory”, 3ª Ed., Prentice Hall, New York. Igarashi, J., Toyama, M., 1958, “Fundamentals of Acoustical Silencers (I)”, Report No. 399,
Aeronautical Research Institute, University of Tokyo, pp. 223-241. Jacobsen, F., Poulsen, T., Rindel, J.H., Gade, A.C., Ohlrich, M., 2007, “Fundamentals of
Acoustics and Noise Control”, Editado pela Universidade Técnica da Alemanha (DTU). Kamman, J.W., Naghshineh, K., 1999, “A Comparison of Open-Loop Feedforward and
Closed-Loop Methods for Active Noise Control Using Volume Velocity Minimization”, Applied Acoustics, Vol. 57, pp. 29-37.
Kinsler, L.E., Frey, A.R., Coppens, A.B., Sanders, J.V., 1982, “Fundamentals of Acoustics”, New York: John Wiley & Sons.
Kuo, S.M.; Panahi, I.; Chung, K.M.; Horner, T.; Nadeski, M. and Chyan, J., 1996, “Design of Active Noise Control Systems with the TMS320 Family”, Produtos DSP – Grupo de Semicondutores, Texas Instruments.
Kuo, S.M., Morgan, D.R.,1996, “Active Noise Control System”, Wiley, New York. Kuo, M.S., Dennis, R.M., 1999, “Active Noise Control: a Tutorial Review”, IEEE
Proceedings, Vol. 87, pp. 973-993. L’Espérance, A., Bouchard, M., Paillard, B., Guigou, C., Boudreau, A., 1999, “Active Noise
Control in Large Circular Duct Using an Error Sensors Plane”, Applied Acoustics, Vol. 57, pp. 357-374.
Li, X., Kestell, C.D., Qiu, X., Zander, A.C., Hansen, C.H., 2002, “Experimental Study of Active Control of Higher Order Acoustic Modes in Ducts”, Proceedings of the Acoustic 2002, Adelaide, pp. 8-15.
Li, X., Qiu, X., Leclereq, D.J.J., Zander, A.C., Hansen, C.H., 2003, “Active Control of Higher Order Duct Modes Propagating in a Large Exhaust Stack”, Proceedings of the eighth Western Pacific Acoustics, Melburne, 2003, TE41.
Li, X., Qiu, X., Leclercq, D.L.L., Zander, A.C., Hansen, C.H., 2006, “Implementation of Active Noise Control in a Multi-Modal Spray Dryer Exhaust Stack”, Applied Acoustics, No. 67, pp. 28-48.
Lueg, P., 1936, “Process of Silencing Sound Oscillations,” U.S. Patent No. 2.043.416, June, 1936.
Molloy, C., 1957, “Use of Four Pole Parameters in Vibration Calculations”, Journal of Acoustical Society of America, Vol. 29, pp. 842-853.
Morse, P., 1939, “Transmission of Sound in Pipes”, J. Acoust. Soc. Am., Vol. 11 pp. 205-210.
125
Munjal, M. L., 1975, “Velocity Ration Sum Transfer Matrix Method for the Evaluation of a Muffler with Mean Flow”, Journal of Sound and Vibration, Vol. 39, No. 1, pp. 105-119.
Munjal, M. L., 1987, “Acoustics of Ducts and Mufflers with Application to Exhaust and Ventilation System Design”, John Wiley & Sons.
Nelson, P.A., Elliott, S.J.,1992, “Active Control of Sound”, Academic Press, New York. OH, S.-H., Park, Y., 2000, “Active Noise Control Algorithm Using IIR-Based Filter”, Journal
of Sound and Vibration, Vol. 231, No. 5, pp. 1396-1412. Olson, D.A, Hallstrom, A.D., Wise, S.S., 1989, “Active Noise Control Systems and Air
moving Devices”, Proceedings of Inter-noise, pp. 475-478. Papini, G.S., Pinto, R.L.U.F., 2007, “Active Noise Control for Small Diameter Exhaustion
System”, Proceedings of COBEM, 19th International Congress of Mechanical Engineering, Brasília (DF), Brasil.
Papini, G.S., Pinto, R.L.U.F., Morais, F.H.M., 2008, “Controle Ativo de Ruído para Sistemas de Exaustão Utilizando Filtragem Adaptativa”, Proceedings of SOBRAC, 22th Encontro da Sociedade Brasileira de Acústica, Belo Horizonte (MG), Brasil.
Pawejczyk, M., 2002, “Feedforward Algorithms with Simplified Plant Model for Active Noise Control”, Journal of Sound and Vibration, Vol. 255 (1), pp. 77-95.
Pierce, A.D., 1981, “Acoustics”, McGraw-Hill, New York, pp. 345-348. Pipes, L., 1940, “The matrix Theory of Four Terminal Networks”, Philos. Mag., Vol. 30, pp.
370. Qiu, X.-J., Hansen, C.H., 2000, “A Modified Filtered-x LMS Algorithm for Active Control of
Periodic Noise with On-Line Cancellation Path Modelling”, Journal of Low Frequency Noise, Vibration and Active Control, Vol. 19, pp. 35-46.
Qiu, X., Li, X., Leclereq, D.J.J., Zander, A.C., Kestell, C.D., Hansen, C.H., 2002, “Robust Design of Active Noise Control System on a Spray Dryer Exhaust”, Proceedings of the Active 2002, ISVR, pp. 749-760.
Seybert, A., Cheng, C., 1987, “Application of Boundary Element Method to Acoustic Cavity Response and Muffler Analysis”, J. Vib Acoust. Stress Reliabil. Des., Vol. 109, pp. 15-21.
Shynk, J.J., 1989, “Adaptive IIR Filtering”, IEEE ASSP Magazine, Vol. 6 (4), pp. 4-21. Snyder, S.D., 2000, “Active Noise Control Primer – Modern Acoustics and Signal
Processing”, Editora Springer – Verlag New York, Inc. Sun, X., Meng, G., 2004, “Steiglitz-Mcbride Type Adaptive IIR Algorithm for Active Noise
Control”, Journal of Sound and Vibration, Vol. 273, pp. 441-450. Thawani, P., Doige, A., 1983, “Effect of Mean Flow and Damping on the Performance of
Reactive Mufflers”, Can. Acoust., Vol. 11, No. 1, pp. 29-47. Tobias, O.J., Gontijo, W.A., Seara, R., Lopes, E.M.O., Coan, J.J., 2005, “Algoritmos
Adaptativos no Controle Ativo de Vibrações e Ruídos Acústicos”, DINCON’2005, 40 Congresso Temático de Dinâmica, Controle e Aplicações, UNESP – Campus de Bauru.
Widrow, B., 1970, “Adaptive Filters”, Aspects of Network and Systems Theory, R.E. Kalman e N. DeClaris, pp. 563-587.
Widrow, B., Stearns, S.D., 1985, “Adaptive Signal Processing”, Prentice-Hall, Englewood Cliffs, NJ.
Wise, S.S., Depies, C.R., Dineen, S.H., 1992, “Case Histories of Active Noise Control on Industrial Fans and Air Handlers Used for Heating, Ventilating and Air Conditioning”, Proc. Inter-Noise, pp.307-312.
Wu, J.D., Bai, M.R., 2001, “Application of Feedforward Adaptive Active-Noise Control for Reducing Blade Passing Noise in Centrifugal Fans”, Journal of Sound and Vibration, Vol. 239(5), pp. 1051-1062.
Yuan, J.,2007, “Adaptive Laguerre Filters for Active Noise Control”, Applied Acoustics, Vol. 68, pp. 86-96.

126
Zhang, O.-Z, Jia, Y.-L, 2002, “Active Noise Hybrid Feedforward / Feedback Control Using Neural Network Compensation”, American Society of Mechanical Engineers Journal of Vibration Acoustics, Vol. 124, pp. 100-104.
Zhou, Y.L., Zhang, Q.Z., Li, X.D., Gan, W.S., 2005, “Analysis and DSP Implementation of an ANC System Using a Filtered-Error Neural Network”, Journal of Sound and Vibration, Vol. 285, pp. 1-25.
127
APÊNDICE A: ALGORITMOS LMS MODIFICADOS
A.1 O Método LMS Normalizado
A estabilidade, o tempo de convergência e as flutuações do processo de adaptação LMS são regidos pelo tamanho do passo e pela potência do sinal de referência. Assim, uma importante técnica para otimizar a velocidade de convergência enquanto mantém-se o desempenho desejado do estado permanente, independentemente da potência do sinal de referência, é conhecida como algoritmo LMS normalizado (NLMS), (Kuo at. al., 1996). O algoritmo NLMS é dado como:
( ) ( ) ( ) ( ) ( )nenxnnwnwrrr
µ+=+1 , A.1 onde ( )nµ representa um passo adaptativo que é calculado como:
( )( )nPL
nx
αµ = , A.2
onde ( )nPx denota uma estimativa da potência do sinal x(n) no tempo n, α um tamanho de
passo normalizado que satisfaz o critério: 2<< α0 e L o comprimento da janela igual ao número de coeficientes do filtro adaptativo.
Segundo (Kuo et.al., 1996), dois métodos são mais utilizados para estimar a potência do sinal, o método da técnica de janela retangular em movimento e o método da janela exponencial. Porém, a seguir são apresentadas algumas técnicas úteis à implementação da estimativa da potência do sinal:
1. Escolha ( )0xP como a melhor estimativa a priori de potência do sinal de entrada.
2. Como não é desejável que a estimativa da potência seja zero ou muito pequena, é
necessário implementar uma restrição, como: ( )( )[ ]minxmax P,nPL
nα
µ = , onde Pmin
denota o contorno inferior da potência e Lmax o comprimento máximo da janela igual ao número de coeficientes do filtro adaptativo.
A.2 Método LMS de Correlação
Este algoritmo utiliza uma estimativa da correlação entre o sinal de entrada e o sinal de erro para ajustar o tamanho do passo do algoritmo adaptativo. Assim, após ( )nw
r convergir
para o vetor de pesos ótimos 0wr
, a correlação entre a entrada do filtro e o sinal de erro é zero: ( ) ( )[ ] 0== nenxEρ .
Quando o vetor de pesos corrente ( )nw
r está longe do vetor ótimo, a correlação é alta e o
algoritmo adaptativo está em um estado “ativo” com um passo relativamente grande. Após a convergência do filtro adaptativo, os sinais de entrada e de erro encontram-se bem correlacionados e o tamanho do passo está próximo de zero. Desta maneira, o algoritmo
128
adaptativo encontra-se em um estado “não ativo”, minimizando o excesso de erro médio quadrático excessξ , que é causado pelo ruído aleatório do vetor de pesos após a convergência,
(Kuo et.al., 1996). O algoritmo LMS de correlação, com o tamanho do passo variando no tempo, é resumido a seguir:
( ) ( ) ( ) )n(e)n(xnnwnwrrr
µ+=+ 1 , A3
( ) ( )nn αρµ =+1 , A4
( ) ( ) ( ) ( ) ( )nenxnn ββρρ −+−= 11 , A5 onde α denota um fator de escala e β representa um fator retificador para proceder com a característica não estacionária do processo de adaptação do erro. Assim, este esquema de controle adaptativo do tamanho do passo torna o sistema adaptativo mais robusto às perturbações do erro medido na saída do sistema, (Kuo et.al., 1996).
A.3 O Método LMS com Vazamento
O algoritmo LMS que é sujeito a uma perturbação espectral insuficiente pode resultar numa divergência dos pesos adaptativos. Por exemplo, um sinal senoidal sem ruído com mais de dois pesos exibirá tal conduta, (Kuo et. al., 1996). Neste caso, a solução não é única e os efeitos de uma precisão não finita podem causar uma não restrição dos pesos, de maneira que eles cresçam fora dos limites, resultando em instabilidade durante o processo de adaptação. Desta maneira, a divergência ou instabilidade pode ser evitada através de um mecanismo de “vazamento” durante o processo de adaptação. A seguir é apresentado o algoritmo Leak FXLMS
( ) ( ) ( ) ( )nenxnwnwrrr
µυ +=+ 1 , A6 onde υ denota um fator de vazamento, 10 ≤< υ . Em geral, o valor do fator de vazamento é determinado experimentalmente, com o compromisso entre robustez e perda de desempenho do filtro adaptativo. Segundo Kuo et. al., (1996) o fator de vazamento introduz uma tendência no coeficiente estimado e o excesso da potência do erro devido ao vazamento é proporcional a
( )2
1
−
µ
υ. Desta forma, 1-υ deve manter-se menor que o tamanho do passo, µ, para
proporcionar um nível aceitável de desempenho. Para a realização de um hardware de ponto-fixo, a multiplicação de cada coeficiente por υ pode introduzir um erro de arredondamento, que é somado ao excesso do erro médio quadrático. Em sistemas de controle ativo de ruído a aplicação direta do algoritmo LMS para minimizar a perturbação do ruído principal na localização do sensor de erro induz outro problema. Níveis elevados de ruído associados a ressonâncias de baixa freqüência causam distorções não lineares na fonte de ruído secundária. Uma solução prática a esse problema é limitar a potência de saída. Por exemplo, um termo de saída quadrático ponderado pode ser somado a uma função custo, que é minimizada durante a adaptação. Assim, tem-se:
129
( ) ( ) ( )nynenˆ 22 νξ += , A7 onde ν é um fator de ponderação. Um desempenho similar pode ser obtido restringindo-se os pesos do filtro como:
( ) ( ) ( ) ( )nwnwnenˆ T rrνξ += 2 . A8
Desta maneira, o gradiente estimado no tempo n é:
( ) ( )[ ] ( ) ( ) ( ) ( ) ( )nwnenxnwnenenˆ rrrννξ 2222 +−=+∇=∇ . A9
Substituindo a Eq. A9 na Eq. A6, tem-se:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )nenxnwnenxnw)(nwnenxnwnwrrrrrrrr
µυµµννµµ +=+−=−+=+ 11 A10 onde µνυ −≡ 1 . Assim, o algoritmo Leaky FXLMS não prevê apenas instabilidade, mas limita a potência de saída para evitar distorções de saída na fonte de cancelamento.
A.4 O Método LMS com o Passo Variável
A seguir será apresentada uma versão do algoritmo LMS que utiliza um passo variável, µl(n), cada elemento do vetor peso em um filtro transversal adaptativo. Assim, o valor de cada passo varia de acordo com uma estimativa da distância do erro médio quadrático mínimo, de maneira a permitir uma maior velocidade de convergência. A vantagem deste algoritmo é que apenas um pequeno aumento no tempo de cálculo, aproximadamente 15%, é requerido em relação ao algoritmo LMS, enquanto que o tempo de convergência, em alguns instantes, é reduzido duas vezes, (Kuo et. al., 1996). O algoritmo LMS com o passo variável atualiza o vetor de pesos da seguinte maneira:
( ) ( ) ( ) ( ) ( )nenxnUnwnwrrrr
+=+1 , A11
onde, a matriz ( )nUr
denota uma matriz diagonal dos passos individuais µl(n), l = 0,...,L-1, em relação aos elementos do vetor de pesos no tempo n. Assim, os passos são ajustados individualmente no processo adaptativo.
A matriz ( )nUr
permite um avanço sobre o método do passo descendente à medida que proporciona uma estimativa direcional mais precisa em relação à localização do ponto de mínimo sobre a superfície do erro médio quadrático. Assim, cada componente desta matriz varia numa faixa entre o passo mínimo e o passo máximo.
Uma maneira de atualizar os elementos da matriz ( )nUr
pode ser abordada da seguinte maneira, para qualquer instante de tempo: o valor de µl(n), l = 0,...,L-1, é decrescido de um fator α se x(n-1)e(n) alterna o sinal em m0 amostras sucessivas, (Kuo et.al., 1996). Por outro lado, o valor de µl(n), l = 0,...,L-1, é acrescido de um fator α se x(n-1)e(n) tem o mesmo sinal
130
em m1 amostras sucessivas. Porém, o tamanho do passo não varia a menos que um destes limiares seja excedido. Desta maneira, este algoritmo é expresso da seguinte maneira:
( )
( )
( )( )
−
−
−
=
contrário caso ,n
alternado sinalo com s sucessivaamostras m para ,n
sinalmesmo o com s sucessivaamostras m para ,n
n
l
0l1-
1l
l
1
1
1
µ
µα
αµ
µ A12
Segundo Kuo et. al., (1996), os valores iniciais típicos de α, m0 e m1 são 2, 3 e 3, respectivamente, para sinais de entrada com uma alta razão sinal-ruído. Os valores iniciais típicos de µl(0) são iguais ao passo máximo.
A.5 O Método LMS com Assinatura
O algoritmo LMS requer apenas 2L multiplicações e adições por amostra, que representa um tempo computacional muito menor em relação ao de outros algoritmos adaptativos mais complicados, como o de Kalman e o de mínimos quadráticos recursivos (RLS), (Kuo et. al., 1996). Mesmo assim, existem três versões do algoritmo LMS que reduzem ainda mais o número de multiplicações requeridas e, desta maneira, ampliam a largura de banda para aplicações em tempo real. Para a primeira versão do algoritmo LMS assinado (“signed”), um valor absoluto do erro instantâneo é utilizado como um critério de erro:
( ) ( )nenˆ 2=ξ . A13
Desta maneira, o gradiente estimado é calculado como:
( ) ( )[ ] ( )[ ] ( ) ( )[ ]nesgnnxnesgnnenˆ r22 −=∇=∇ξ , A14
onde,
[ ]
<
=
>
≡
0u se1-
0u se0
0u se1
usgn , A15
denota a função “assinatura”. Substituindo a Eq. A14 na Eq. A6, tem-se o algoritmo LMS “assinado pelo erro”:
( ) ( ) ( ) ( )[ ]nesgnnxnwnwrrr
µ+=+1 . A16
Assim, apenas uma decisão “IF – ELSE” é requerida por iteração. O algoritmo mantém a mesma direção do gradiente estimado como no algoritmo LMS. Entretanto, para um passo constante µ, a computação reduzida deste algoritmo ocorre à custa de uma razão de convergência lenta, desde que um pequeno valor do passo seja utilizado por razões de estabilidade.
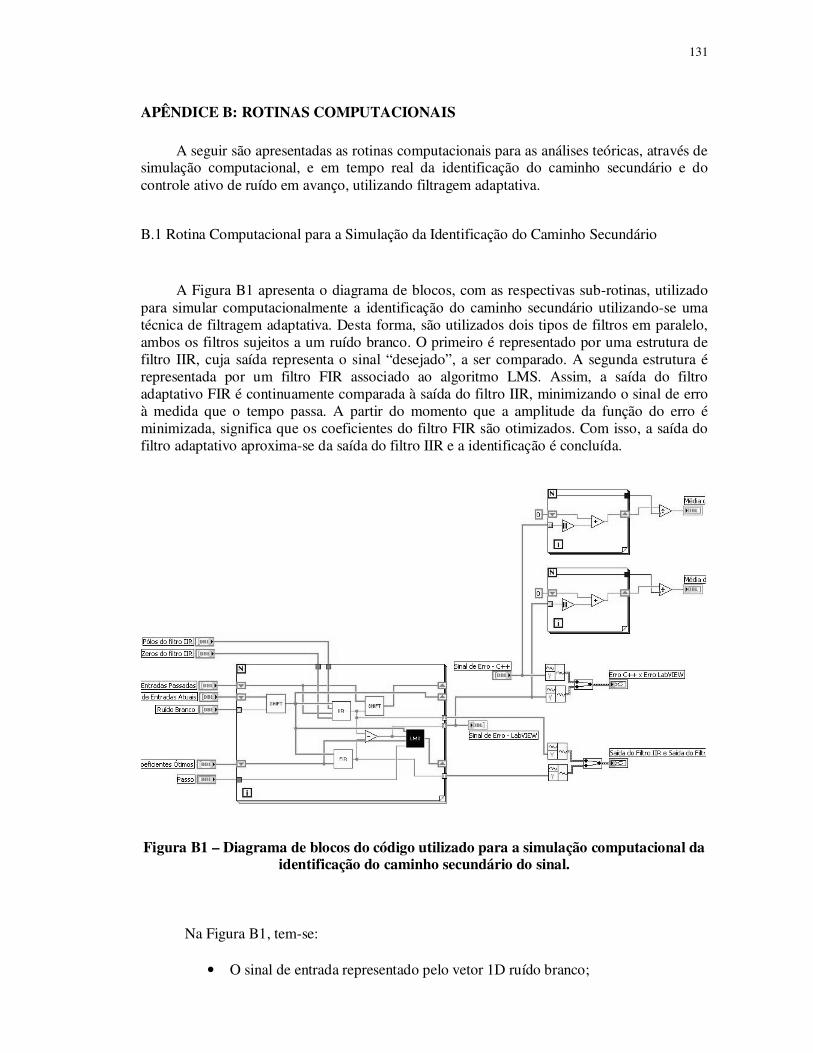
131
APÊNDICE B: ROTINAS COMPUTACIONAIS
A seguir são apresentadas as rotinas computacionais para as análises teóricas, através de simulação computacional, e em tempo real da identificação do caminho secundário e do controle ativo de ruído em avanço, utilizando filtragem adaptativa.
B.1 Rotina Computacional para a Simulação da Identificação do Caminho Secundário
A Figura B1 apresenta o diagrama de blocos, com as respectivas sub-rotinas, utilizado para simular computacionalmente a identificação do caminho secundário utilizando-se uma técnica de filtragem adaptativa. Desta forma, são utilizados dois tipos de filtros em paralelo, ambos os filtros sujeitos a um ruído branco. O primeiro é representado por uma estrutura de filtro IIR, cuja saída representa o sinal “desejado”, a ser comparado. A segunda estrutura é representada por um filtro FIR associado ao algoritmo LMS. Assim, a saída do filtro adaptativo FIR é continuamente comparada à saída do filtro IIR, minimizando o sinal de erro à medida que o tempo passa. A partir do momento que a amplitude da função do erro é minimizada, significa que os coeficientes do filtro FIR são otimizados. Com isso, a saída do filtro adaptativo aproxima-se da saída do filtro IIR e a identificação é concluída.
Figura B1 – Diagrama de blocos do código utilizado para a simulação computacional da identificação do caminho secundário do sinal.
Na Figura B1, tem-se:
• O sinal de entrada representado pelo vetor 1D ruído branco;
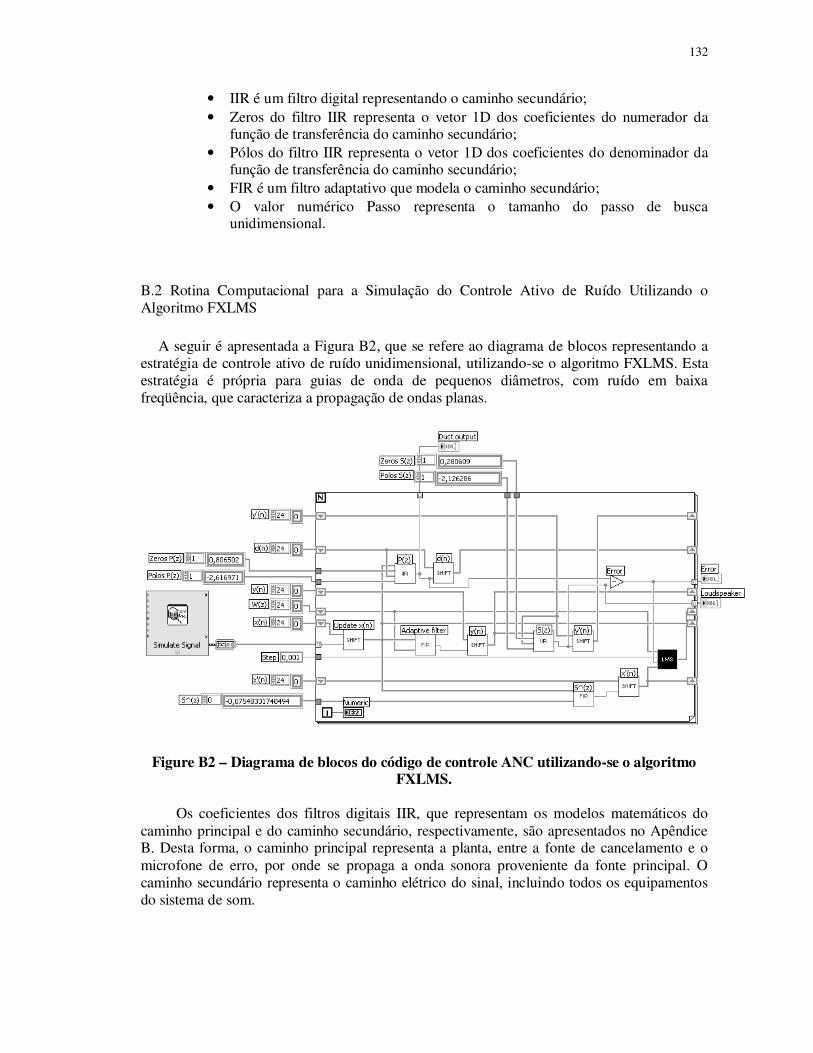
132
• IIR é um filtro digital representando o caminho secundário; • Zeros do filtro IIR representa o vetor 1D dos coeficientes do numerador da
função de transferência do caminho secundário; • Pólos do filtro IIR representa o vetor 1D dos coeficientes do denominador da
função de transferência do caminho secundário; • FIR é um filtro adaptativo que modela o caminho secundário; • O valor numérico Passo representa o tamanho do passo de busca
unidimensional.
B.2 Rotina Computacional para a Simulação do Controle Ativo de Ruído Utilizando o Algoritmo FXLMS
A seguir é apresentada a Figura B2, que se refere ao diagrama de blocos representando a
estratégia de controle ativo de ruído unidimensional, utilizando-se o algoritmo FXLMS. Esta estratégia é própria para guias de onda de pequenos diâmetros, com ruído em baixa freqüência, que caracteriza a propagação de ondas planas.
Figure B2 – Diagrama de blocos do código de controle ANC utilizando-se o algoritmo FXLMS.
Os coeficientes dos filtros digitais IIR, que representam os modelos matemáticos do
caminho principal e do caminho secundário, respectivamente, são apresentados no Apêndice B. Desta forma, o caminho principal representa a planta, entre a fonte de cancelamento e o microfone de erro, por onde se propaga a onda sonora proveniente da fonte principal. O caminho secundário representa o caminho elétrico do sinal, incluindo todos os equipamentos do sistema de som.
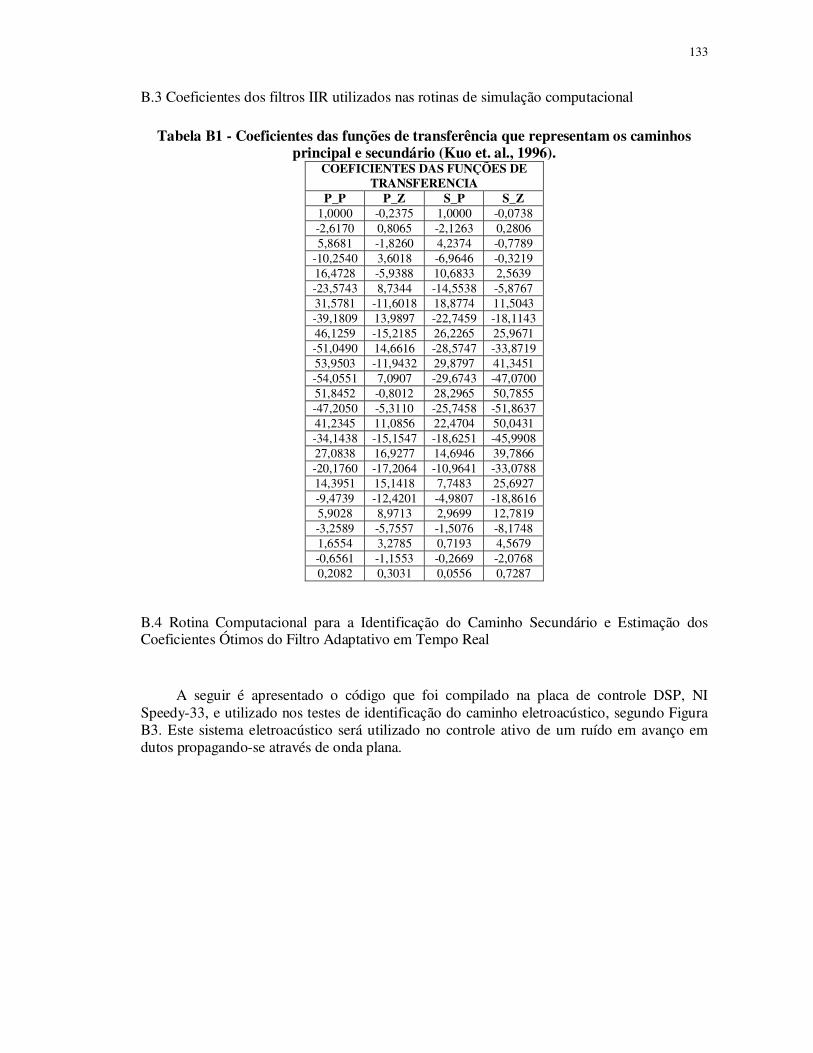
133
B.3 Coeficientes dos filtros IIR utilizados nas rotinas de simulação computacional
Tabela B1 - Coeficientes das funções de transferência que representam os caminhos
principal e secundário (Kuo et. al., 1996). COEFICIENTES DAS FUNÇÕES DE
TRANSFERENCIA P_P P_Z S_P S_Z
1,0000 -0,2375 1,0000 -0,0738 -2,6170 0,8065 -2,1263 0,2806 5,8681 -1,8260 4,2374 -0,7789
-10,2540 3,6018 -6,9646 -0,3219 16,4728 -5,9388 10,6833 2,5639 -23,5743 8,7344 -14,5538 -5,8767 31,5781 -11,6018 18,8774 11,5043 -39,1809 13,9897 -22,7459 -18,1143 46,1259 -15,2185 26,2265 25,9671 -51,0490 14,6616 -28,5747 -33,8719 53,9503 -11,9432 29,8797 41,3451 -54,0551 7,0907 -29,6743 -47,0700 51,8452 -0,8012 28,2965 50,7855 -47,2050 -5,3110 -25,7458 -51,8637 41,2345 11,0856 22,4704 50,0431 -34,1438 -15,1547 -18,6251 -45,9908 27,0838 16,9277 14,6946 39,7866 -20,1760 -17,2064 -10,9641 -33,0788 14,3951 15,1418 7,7483 25,6927 -9,4739 -12,4201 -4,9807 -18,8616 5,9028 8,9713 2,9699 12,7819 -3,2589 -5,7557 -1,5076 -8,1748 1,6554 3,2785 0,7193 4,5679 -0,6561 -1,1553 -0,2669 -2,0768 0,2082 0,3031 0,0556 0,7287
B.4 Rotina Computacional para a Identificação do Caminho Secundário e Estimação dos Coeficientes Ótimos do Filtro Adaptativo em Tempo Real
A seguir é apresentado o código que foi compilado na placa de controle DSP, NI Speedy-33, e utilizado nos testes de identificação do caminho eletroacústico, segundo Figura B3. Este sistema eletroacústico será utilizado no controle ativo de um ruído em avanço em dutos propagando-se através de onda plana.
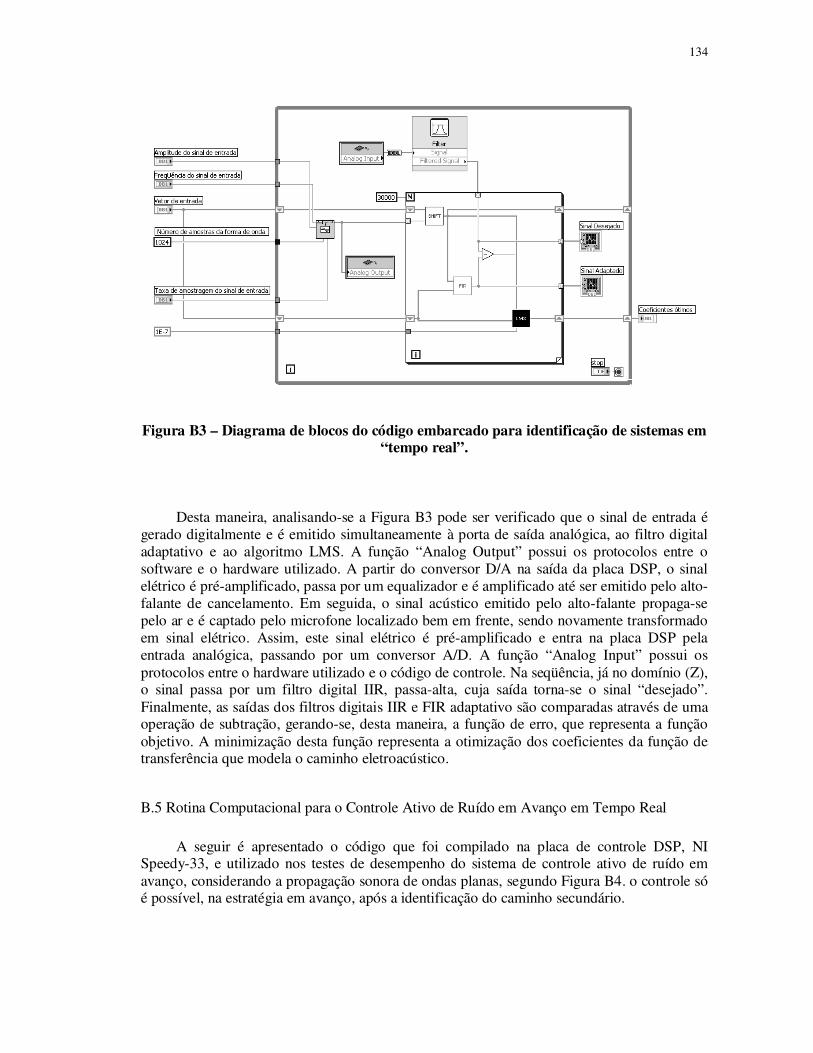
134
Figura B3 – Diagrama de blocos do código embarcado para identificação de sistemas em “tempo real”.
Desta maneira, analisando-se a Figura B3 pode ser verificado que o sinal de entrada é gerado digitalmente e é emitido simultaneamente à porta de saída analógica, ao filtro digital adaptativo e ao algoritmo LMS. A função “Analog Output” possui os protocolos entre o software e o hardware utilizado. A partir do conversor D/A na saída da placa DSP, o sinal elétrico é pré-amplificado, passa por um equalizador e é amplificado até ser emitido pelo alto-falante de cancelamento. Em seguida, o sinal acústico emitido pelo alto-falante propaga-se pelo ar e é captado pelo microfone localizado bem em frente, sendo novamente transformado em sinal elétrico. Assim, este sinal elétrico é pré-amplificado e entra na placa DSP pela entrada analógica, passando por um conversor A/D. A função “Analog Input” possui os protocolos entre o hardware utilizado e o código de controle. Na seqüência, já no domínio (Z), o sinal passa por um filtro digital IIR, passa-alta, cuja saída torna-se o sinal “desejado”. Finalmente, as saídas dos filtros digitais IIR e FIR adaptativo são comparadas através de uma operação de subtração, gerando-se, desta maneira, a função de erro, que representa a função objetivo. A minimização desta função representa a otimização dos coeficientes da função de transferência que modela o caminho eletroacústico.
B.5 Rotina Computacional para o Controle Ativo de Ruído em Avanço em Tempo Real
A seguir é apresentado o código que foi compilado na placa de controle DSP, NI
Speedy-33, e utilizado nos testes de desempenho do sistema de controle ativo de ruído em avanço, considerando a propagação sonora de ondas planas, segundo Figura B4. o controle só é possível, na estratégia em avanço, após a identificação do caminho secundário.
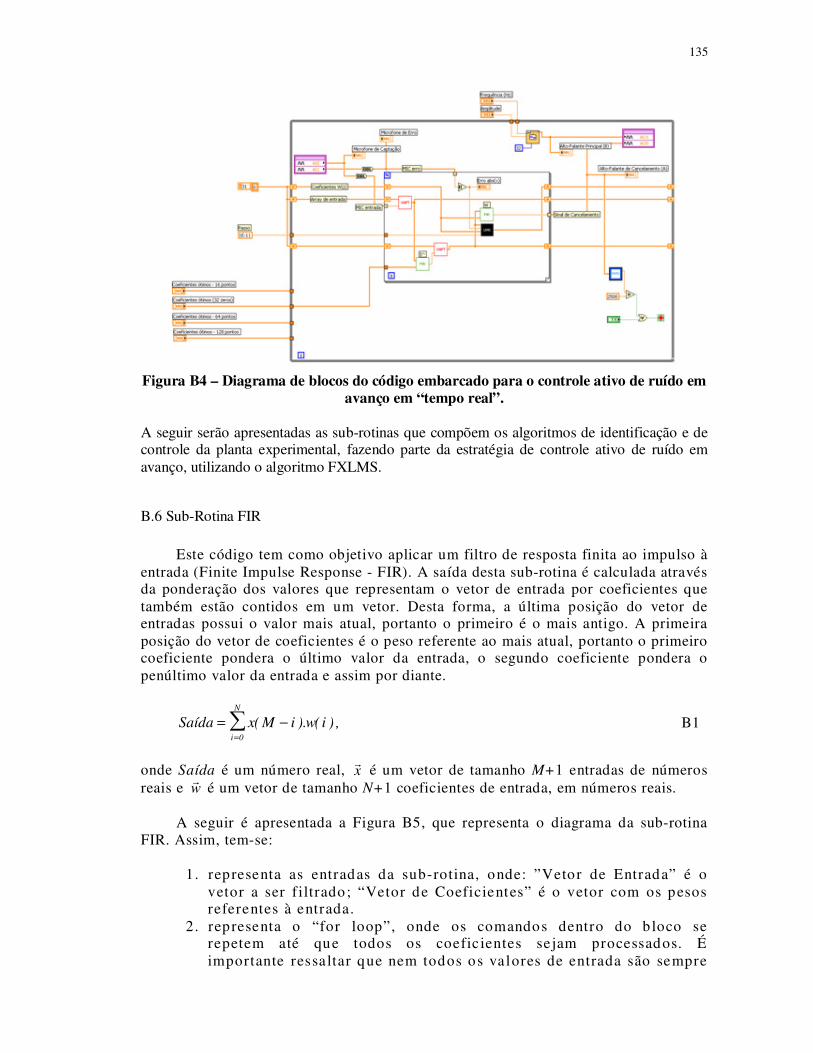
135
Figura B4 – Diagrama de blocos do código embarcado para o controle ativo de ruído em
avanço em “tempo real”. A seguir serão apresentadas as sub-rotinas que compõem os algoritmos de identificação e de controle da planta experimental, fazendo parte da estratégia de controle ativo de ruído em avanço, utilizando o algoritmo FXLMS.
B.6 Sub-Rotina FIR
Este código tem como objetivo aplicar um filtro de resposta finita ao impulso à entrada (Finite Impulse Response - FIR). A saída desta sub-rotina é calculada através da ponderação dos valores que representam o vetor de entrada por coeficientes que também estão contidos em um vetor. Desta forma, a última posição do vetor de entradas possui o valor mais atual, portanto o primeiro é o mais antigo. A primeira posição do vetor de coeficientes é o peso referente ao mais atual, portanto o primeiro coeficiente pondera o último valor da entrada, o segundo coeficiente pondera o penúltimo valor da entrada e assim por diante.
∑=
−=N
0i
)i(w).iM(xSaída , B1
onde Saída é um número real, x
r é um vetor de tamanho M+1 entradas de números
reais e wr
é um vetor de tamanho N+1 coeficientes de entrada, em números reais. A seguir é apresentada a Figura B5, que representa o diagrama da sub-rotina FIR. Assim, tem-se:
1. representa as entradas da sub-rotina, onde: ”Vetor de Entrada” é o vetor a ser filtrado; “Vetor de Coeficientes” é o vetor com os pesos referentes à entrada.
2. representa o “for loop”, onde os comandos dentro do b loco se repetem até que todos os coefic ientes se jam processados. É importante ressa ltar que nem todos os valores de entrada são sempre
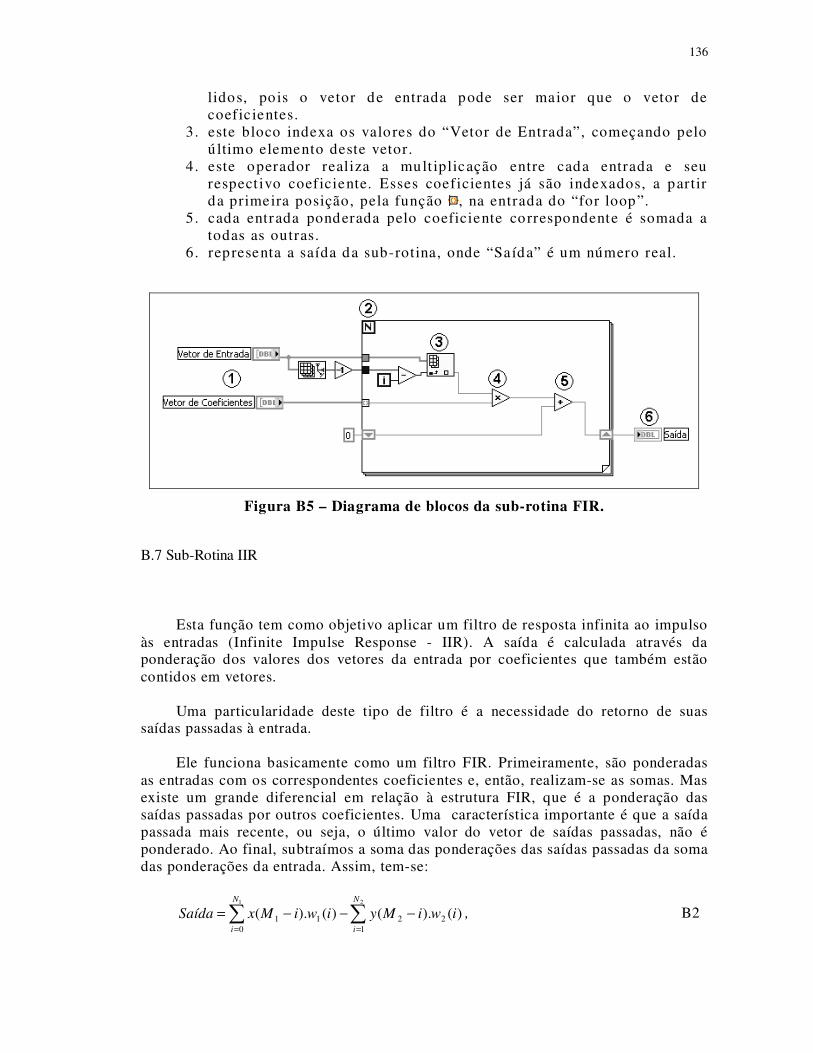
136
lidos, po is o vetor de entrada pode ser maior que o vetor de coefic ientes.
3. este bloco indexa os valores do “Vetor de Entrada”, começando pelo ú ltimo elemento deste vetor.
4. este operador realiza a mult iplicação entre cada entrada e seu respect ivo coeficiente. Esses coeficientes já são indexados, a partir da primeira posição, pela função , na entrada do “for loop”.
5. cada entrada ponderada pelo coeficiente correspondente é somada a todas as outras.
6. representa a saída da sub-rotina, onde “Saída” é um número real.
Figura B5 – Diagrama de blocos da sub-rotina FIR.
B.7 Sub-Rotina IIR
Esta função tem como objetivo aplicar um filtro de resposta infinita ao impulso às entradas (Infinite Impulse Response - IIR). A saída é calculada através da ponderação dos valores dos vetores da entrada por coeficientes que também estão contidos em vetores. Uma particularidade deste tipo de filtro é a necessidade do retorno de suas saídas passadas à entrada. Ele funciona basicamente como um filtro FIR. Primeiramente, são ponderadas as entradas com os correspondentes coeficientes e, então, realizam-se as somas. Mas existe um grande diferencial em relação à estrutura FIR, que é a ponderação das saídas passadas por outros coeficientes. Uma característica importante é que a saída passada mais recente, ou seja, o último valor do vetor de saídas passadas, não é ponderado. Ao final, subtraímos a soma das ponderações das saídas passadas da soma das ponderações da entrada. Assim, tem-se:
∑∑==
−−−=21
122
011 )().()().(
N
i
N
i
iwiMyiwiMxSaída , B2
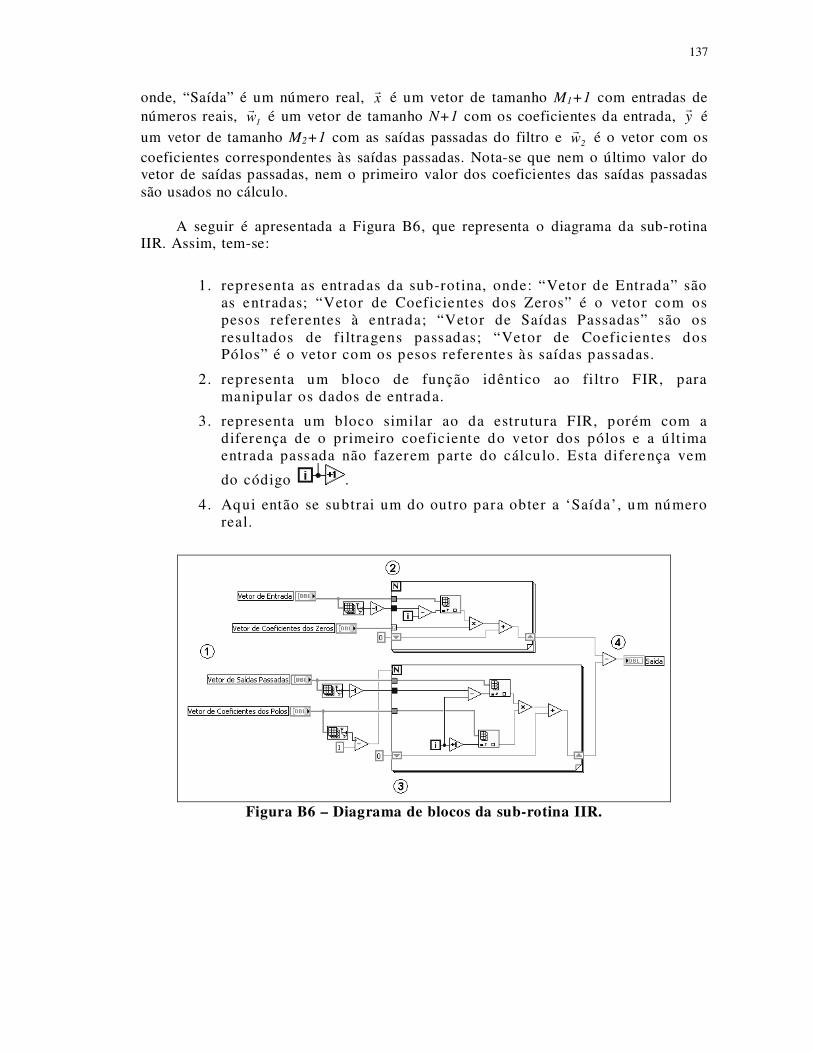
137
onde, “Saída” é um número real, xr
é um vetor de tamanho M1+1 com entradas de números reais, 1w
r é um vetor de tamanho N+1 com os coeficientes da entrada, y
r é
um vetor de tamanho M2+1 com as saídas passadas do filtro e 2wr
é o vetor com os coeficientes correspondentes às saídas passadas. Nota-se que nem o último valor do vetor de saídas passadas, nem o primeiro valor dos coeficientes das saídas passadas são usados no cálculo. A seguir é apresentada a Figura B6, que representa o diagrama da sub-rotina IIR. Assim, tem-se:
1. representa as entradas da sub-rotina, onde: “Vetor de Entrada” são as entradas; “Vetor de Coeficientes dos Zeros” é o vetor com os pesos referentes à entrada; “Vetor de Saídas Passadas” são os resultados de filtragens passadas; “Vetor de Coeficientes dos Pólos” é o vetor com os pesos referentes às saídas passadas.
2. representa um bloco de função idênt ico ao filtro FIR, para manipular os dados de entrada.
3. representa um bloco similar ao da estrutura FIR, porém com a diferença de o primeiro coefic iente do vetor dos pólos e a ú lt ima entrada passada não fazerem parte do cálcu lo. Esta diferença vem
do código .
4. Aqui então se subtrai um do outro para obter a ‘Saída’, um número real.
Figura B6 – Diagrama de blocos da sub-rotina IIR.
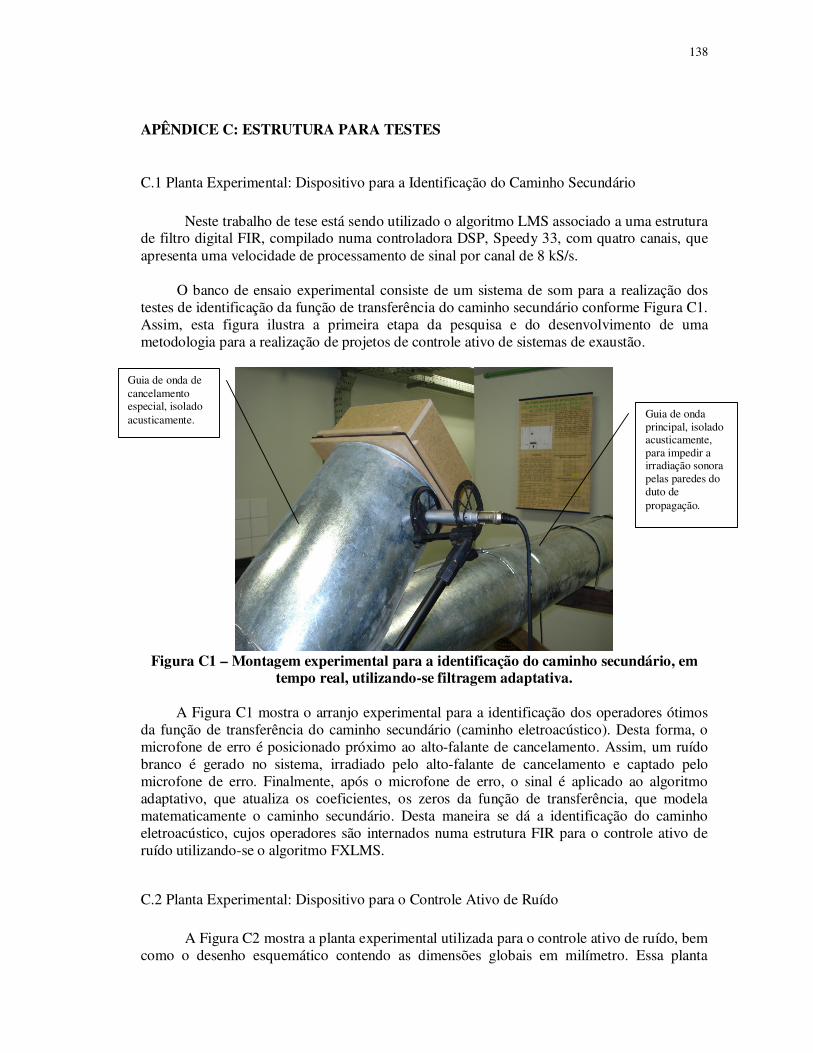
138
APÊNDICE C: ESTRUTURA PARA TESTES
C.1 Planta Experimental: Dispositivo para a Identificação do Caminho Secundário
Neste trabalho de tese está sendo utilizado o algoritmo LMS associado a uma estrutura
de filtro digital FIR, compilado numa controladora DSP, Speedy 33, com quatro canais, que apresenta uma velocidade de processamento de sinal por canal de 8 kS/s.
O banco de ensaio experimental consiste de um sistema de som para a realização dos testes de identificação da função de transferência do caminho secundário conforme Figura C1. Assim, esta figura ilustra a primeira etapa da pesquisa e do desenvolvimento de uma metodologia para a realização de projetos de controle ativo de sistemas de exaustão.
Figura C1 – Montagem experimental para a identificação do caminho secundário, em
tempo real, utilizando-se filtragem adaptativa. A Figura C1 mostra o arranjo experimental para a identificação dos operadores ótimos da função de transferência do caminho secundário (caminho eletroacústico). Desta forma, o microfone de erro é posicionado próximo ao alto-falante de cancelamento. Assim, um ruído branco é gerado no sistema, irradiado pelo alto-falante de cancelamento e captado pelo microfone de erro. Finalmente, após o microfone de erro, o sinal é aplicado ao algoritmo adaptativo, que atualiza os coeficientes, os zeros da função de transferência, que modela matematicamente o caminho secundário. Desta maneira se dá a identificação do caminho eletroacústico, cujos operadores são internados numa estrutura FIR para o controle ativo de ruído utilizando-se o algoritmo FXLMS.
C.2 Planta Experimental: Dispositivo para o Controle Ativo de Ruído
A Figura C2 mostra a planta experimental utilizada para o controle ativo de ruído, bem
como o desenho esquemático contendo as dimensões globais em milímetro. Essa planta
Guia de onda principal, isolado acusticamente, para impedir a irradiação sonora pelas paredes do duto de propagação.
Guia de onda de cancelamento especial, isolado acusticamente.
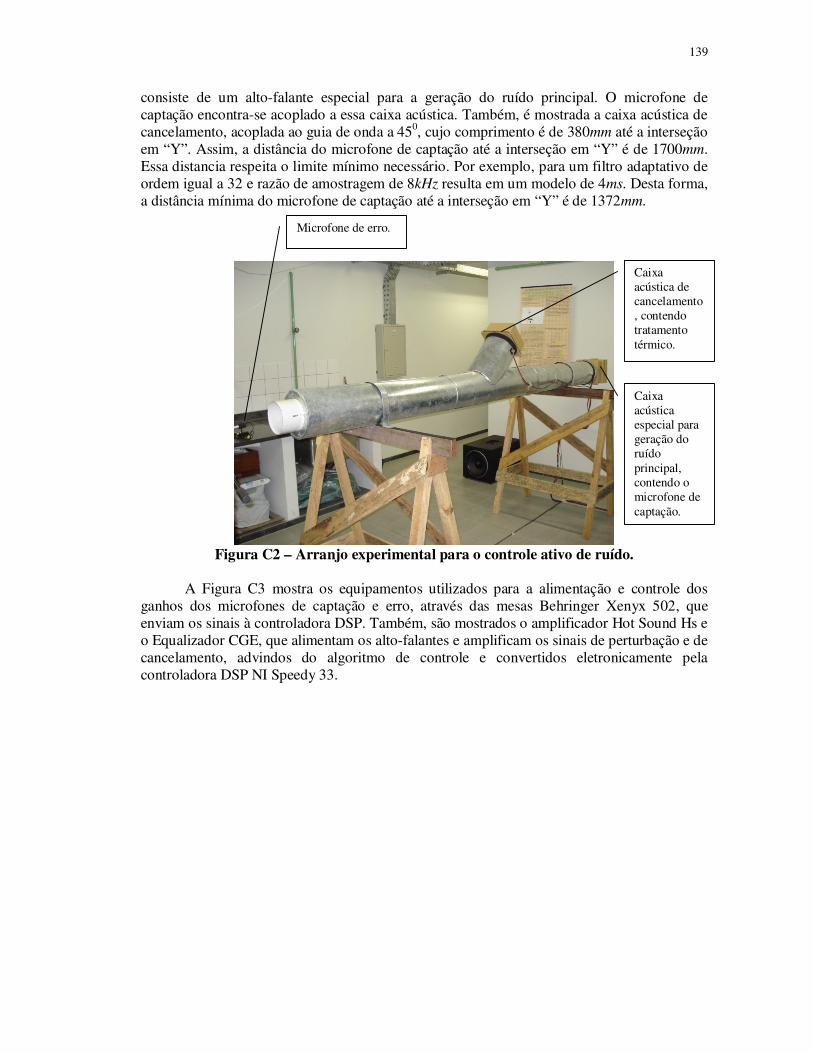
139
consiste de um alto-falante especial para a geração do ruído principal. O microfone de captação encontra-se acoplado a essa caixa acústica. Também, é mostrada a caixa acústica de cancelamento, acoplada ao guia de onda a 450, cujo comprimento é de 380mm até a interseção em “Y”. Assim, a distância do microfone de captação até a interseção em “Y” é de 1700mm. Essa distancia respeita o limite mínimo necessário. Por exemplo, para um filtro adaptativo de ordem igual a 32 e razão de amostragem de 8kHz resulta em um modelo de 4ms. Desta forma, a distância mínima do microfone de captação até a interseção em “Y” é de 1372mm.
Figura C2 – Arranjo experimental para o controle ativo de ruído.
A Figura C3 mostra os equipamentos utilizados para a alimentação e controle dos
ganhos dos microfones de captação e erro, através das mesas Behringer Xenyx 502, que enviam os sinais à controladora DSP. Também, são mostrados o amplificador Hot Sound Hs e o Equalizador CGE, que alimentam os alto-falantes e amplificam os sinais de perturbação e de cancelamento, advindos do algoritmo de controle e convertidos eletronicamente pela controladora DSP NI Speedy 33.
Caixa acústica de cancelamento, contendo tratamento térmico.
Caixa acústica especial para geração do ruído principal, contendo o microfone de captação.
Microfone de erro.

140
Figura C3 – Rack contendo todos os equipamentos utilizados na alimentação,
amplificação e controle do sistema ANC.
A Figura C4 mostra uma vista geral do laboratório contendo toda a planta experimental utilizada para o controle ativo de ruído, através de uma estratégia em avanço.
Figura C4 – Planta experimental para o controle ativo de ruído.
C.3 Equipamento de Medição Sonora Utilizado
A Tabela C1 apresenta a relação dos equipamentos utilizados, incluindo-se a marca e o modelo dos mesmos. Toda a instrumentação utilizada apresenta certificado de calibração fornecida pelo fabricante e pelo Laboratório de Acústica do INMETRO, atendendo também
Placa de controle NI Speedy 33, DSP.
Mesas de alimentação e de ganhos dos microfones de captação e de erro.
Equalizador.
Amplificador.
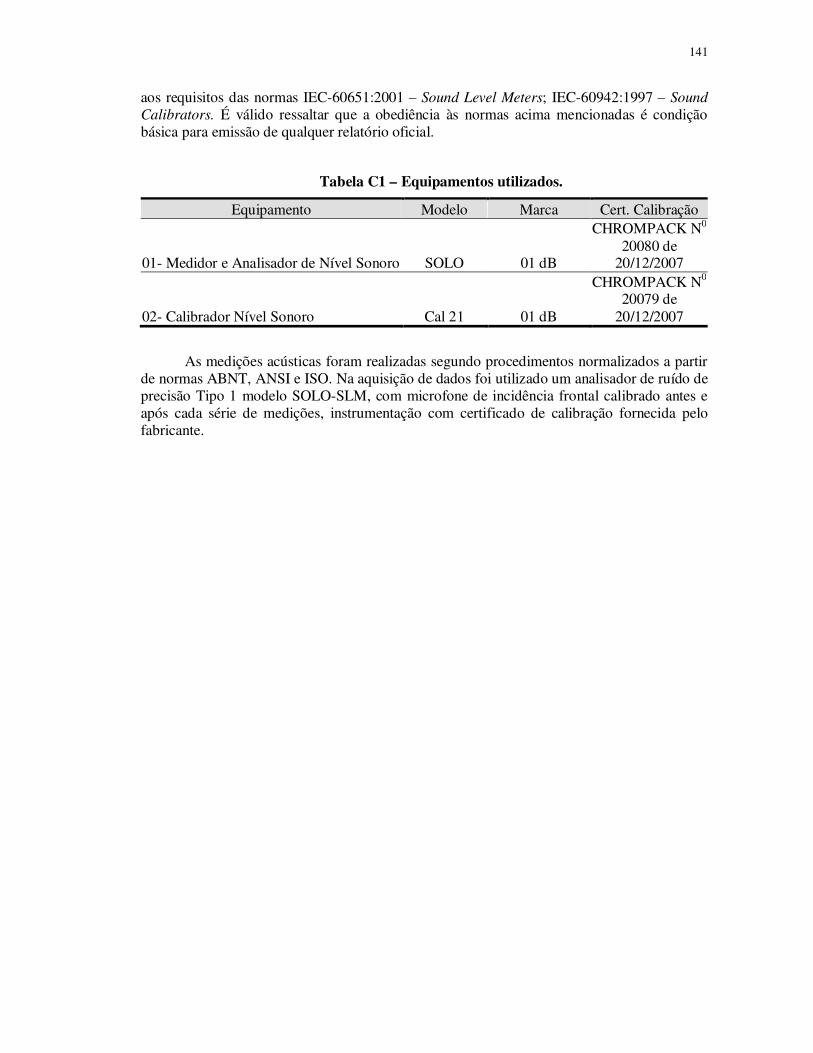
141
aos requisitos das normas IEC-60651:2001 – Sound Level Meters; IEC-60942:1997 – Sound Calibrators. É válido ressaltar que a obediência às normas acima mencionadas é condição básica para emissão de qualquer relatório oficial.
Tabela C1 – Equipamentos utilizados.
Equipamento Modelo Marca Cert. Calibração
01- Medidor e Analisador de Nível Sonoro SOLO 01 dB
CHROMPACK N0 20080 de
20/12/2007
02- Calibrador Nível Sonoro Cal 21 01 dB
CHROMPACK N0 20079 de
20/12/2007
As medições acústicas foram realizadas segundo procedimentos normalizados a partir de normas ABNT, ANSI e ISO. Na aquisição de dados foi utilizado um analisador de ruído de precisão Tipo 1 modelo SOLO-SLM, com microfone de incidência frontal calibrado antes e após cada série de medições, instrumentação com certificado de calibração fornecida pelo fabricante.

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas
Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo





























