Embed Size (px)
Citation preview

Dense Terrain Extraction
from Stereo Imagery Using
Semi-Global Matching
Frank Obusek – Application Engineer
LaRSGIS April 24, 2013

HxGN Live June 3-6, 2013
2

ERDAS IMAGINE Spatial Modeler Workshop
4/25 Thursday 1pm – 4pm
National Wetlands Research Center Conference Room
Andy Zusmanis - 27 years with ERDAS/Intergraph
3
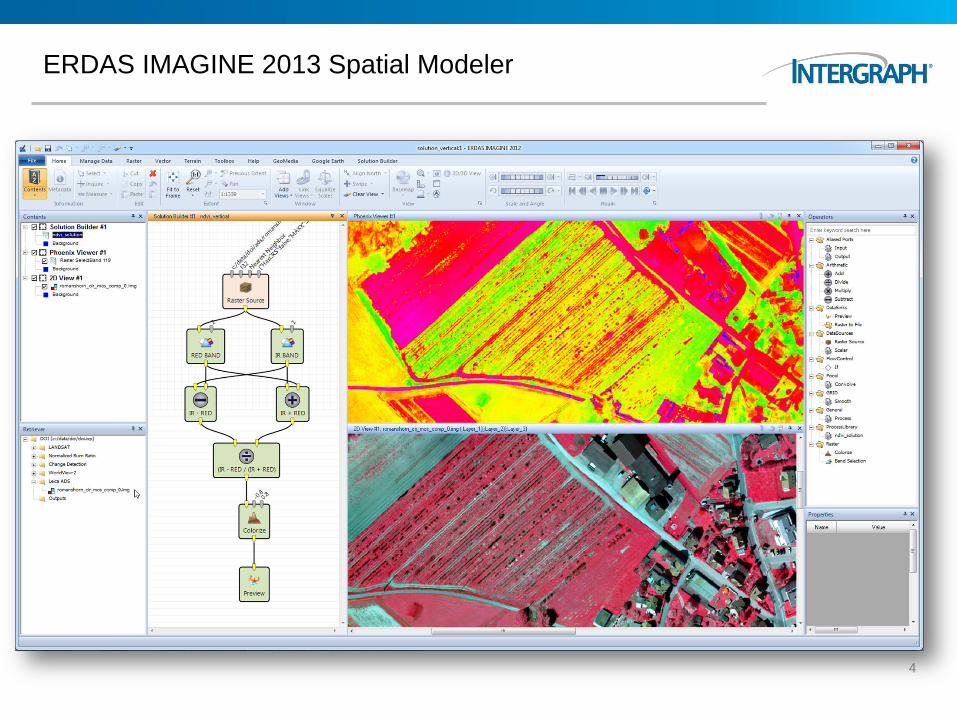
ERDAS IMAGINE 2013 Spatial Modeler
4
Dense Terrain Extraction
from Stereo Imagery Using
Semi-Global Matching
Frank Obusek – Application Engineer
LaRSGIS April 24, 2013
6
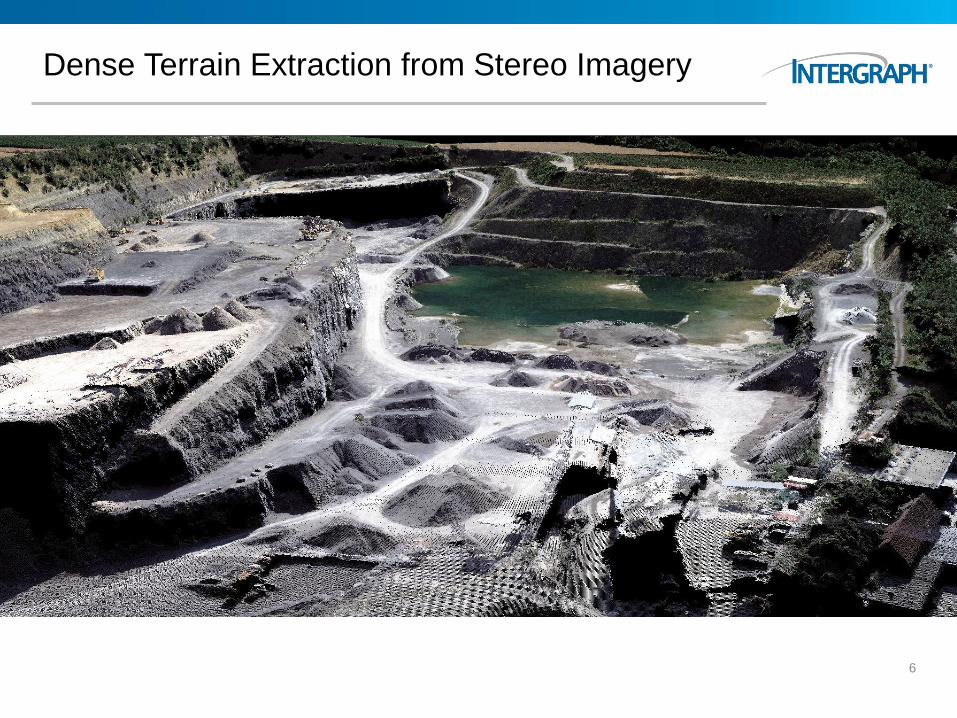
Dense Terrain Extraction from Stereo Imagery
Dense Terrain Extraction from Stereo Imagery
7
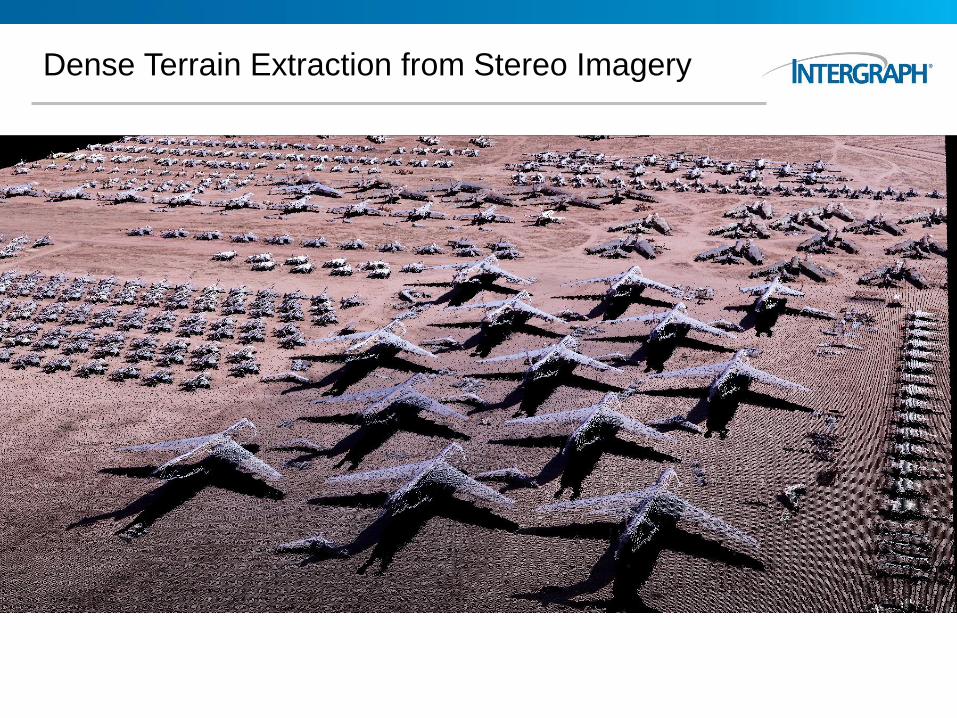
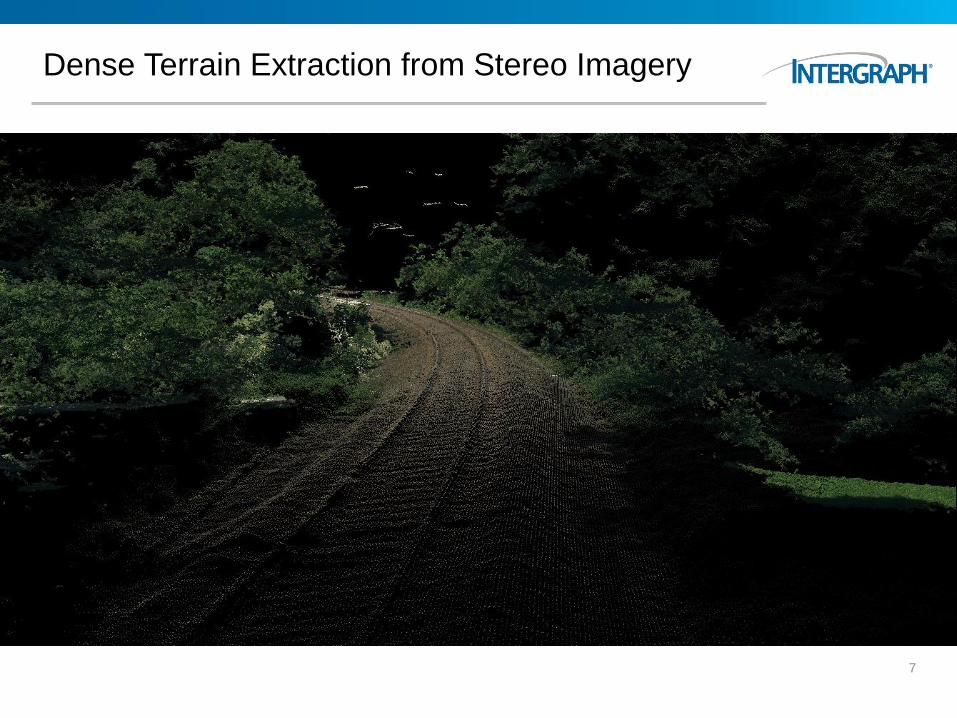
Dense Terrain Extraction from Stereo Imagery
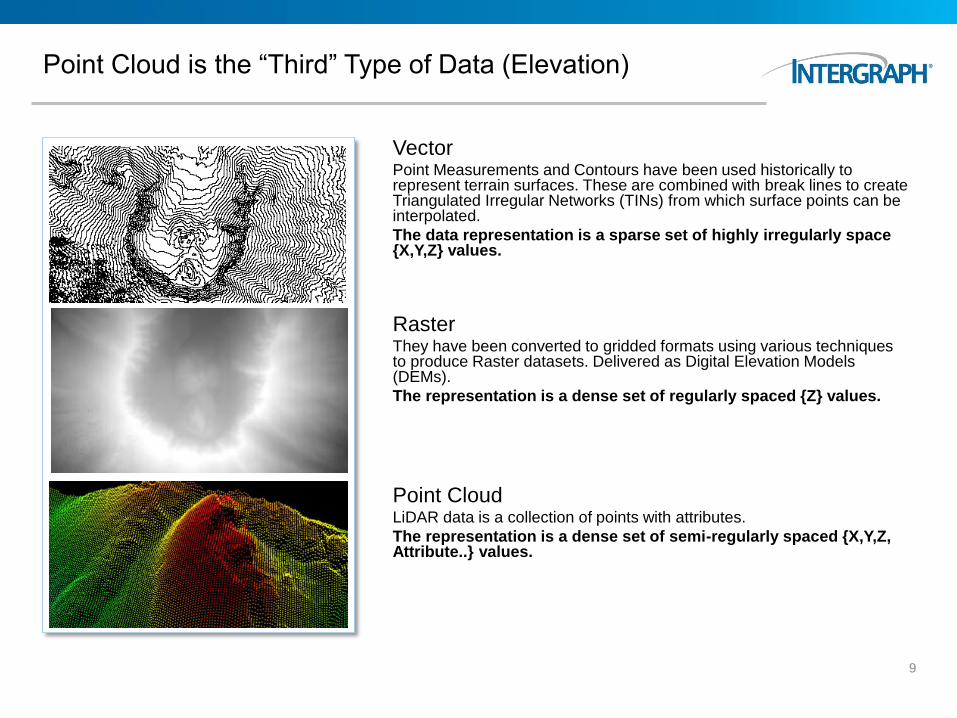
Point Cloud is the “Third” Type of Data (Elevation)
Vector Point Measurements and Contours have been used historically to represent terrain surfaces. These are combined with break lines to create Triangulated Irregular Networks (TINs) from which surface points can be interpolated.
The data representation is a sparse set of highly irregularly space {X,Y,Z} values.
Raster They have been converted to gridded formats using various techniques to produce Raster datasets. Delivered as Digital Elevation Models (DEMs).
The representation is a dense set of regularly spaced {Z} values.
Point Cloud LiDAR data is a collection of points with attributes.
The representation is a dense set of semi-regularly spaced {X,Y,Z, Attribute..} values.
9
Point Cloud Benefits
LiDAR Point Clouds
– Attach attributes to each point
– Multiple returns
– Accurate Z
– Flown at night
– Vegetation penetration
10
Point Cloud Benefits
Dense Point Clouds from Stereo Imagery
– Attach attributes to each point
– High Point Density
– Better XY positioning
– Less expensive than flying LiDAR data
– Historic point cloud data (pre-LiDAR times)
11
Heiko Hirschmüller, Ph.D.
German Aerospace Center Institute of Robotics and Mechatronics Department of Perception and Cognition
Semi-Global Matching (SGM)
SGM is a stereo matching method that is based on pixel-wise matching, supported by a global smoothness function that is optimized along multiple paths (Hirschmüller, 2008, 2006 and 2005).
It has a regular algorithmic structure and uses simple operations and is therefore well suited for parallel implementation on the CPU using vector commands as well as on the GPU (Ernst and Hirschmüller, 2008) and FPGA (Hirschmüller, 2011).
Census is used as matching cost for radiometric robustness (Hirschmüller and Scharstein 2009).
The method is quite insensitive to the choice of parameters, which means that it usually does not require parameter tuning.
12
Semi-Global Matching for Geospatial
Semi-global matching avoids correlation problems caused by
recording or illumination differences or reflections.
Facilitates matching at the boundaries of objects or fine structures.
You can use these dense point clouds to create precise surface
models for highly accurate orthorectification.
Source for manual or semi-automated feature collection.
13
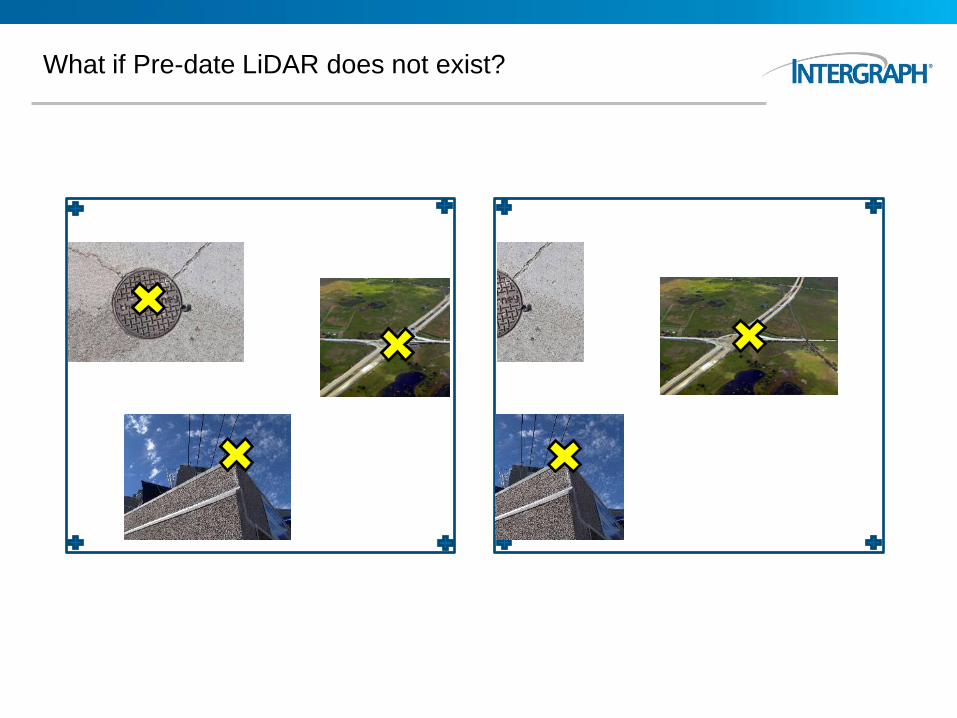
What if Pre-date LiDAR does not exist?
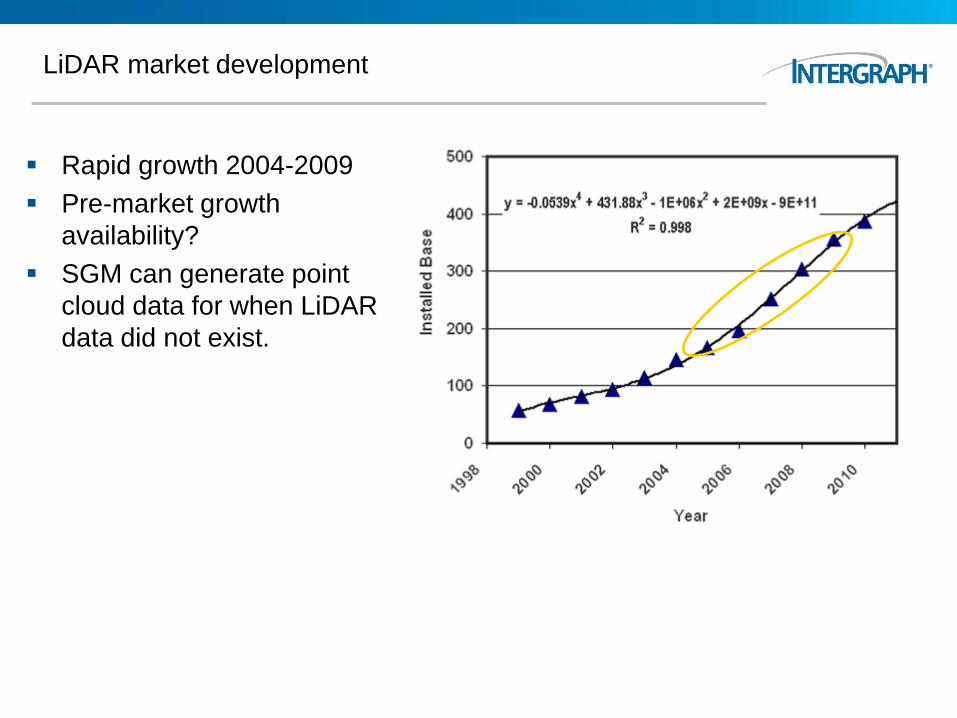
LiDAR market development
Rapid growth 2004-2009
Pre-market growth
availability?
SGM can generate point
cloud data for when LiDAR
data did not exist.
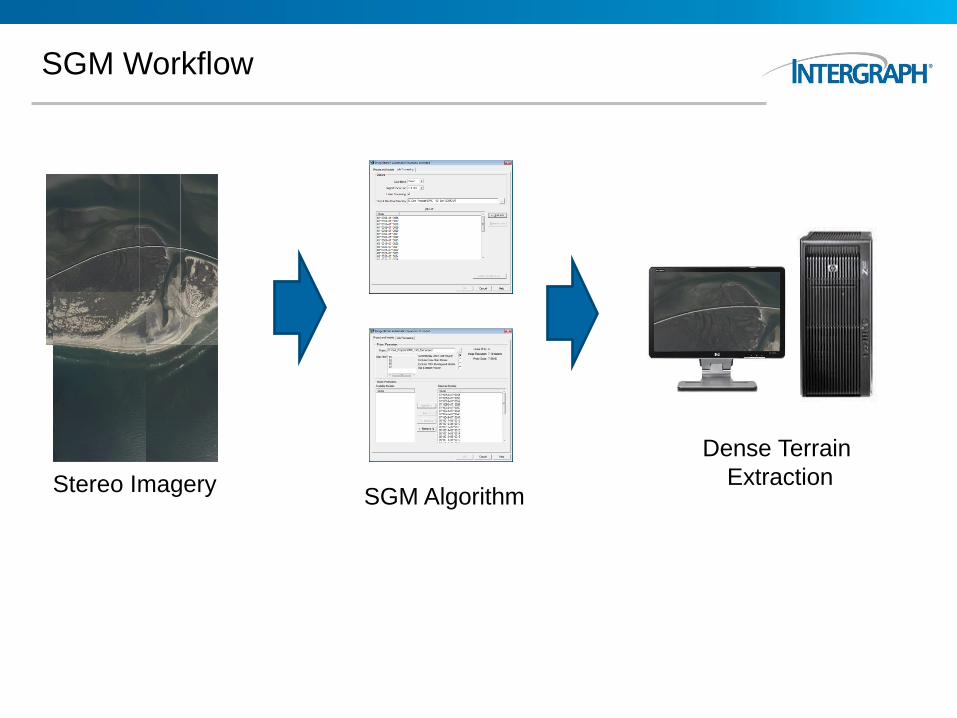
SGM Workflow
Stereo Imagery SGM Algorithm
Dense Terrain
Extraction
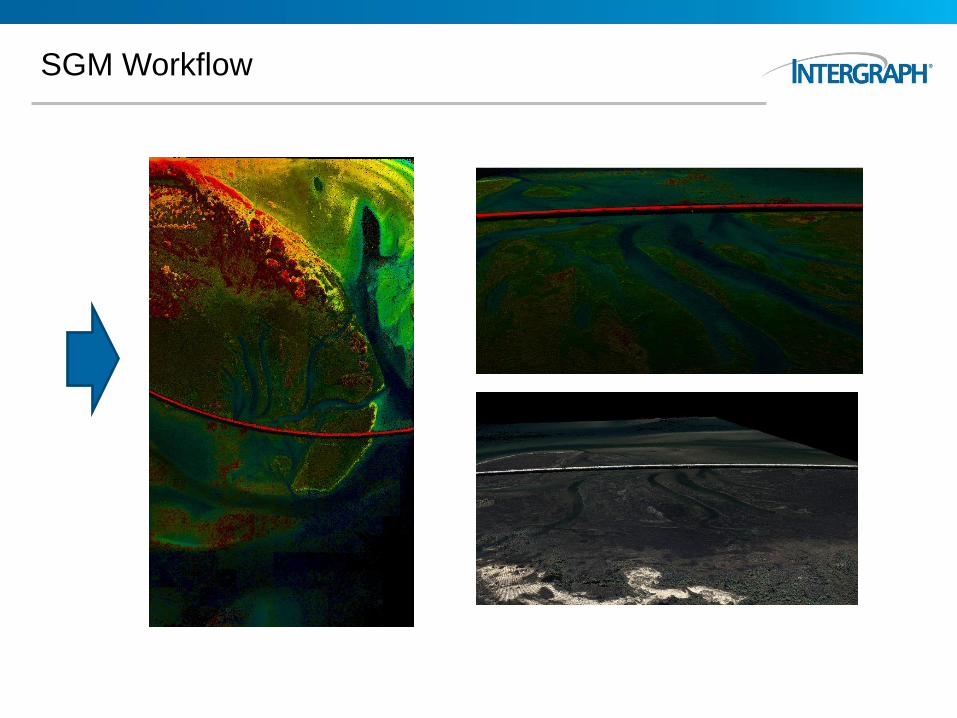
SGM Workflow

Semi-Global Matching Point Clouds
19
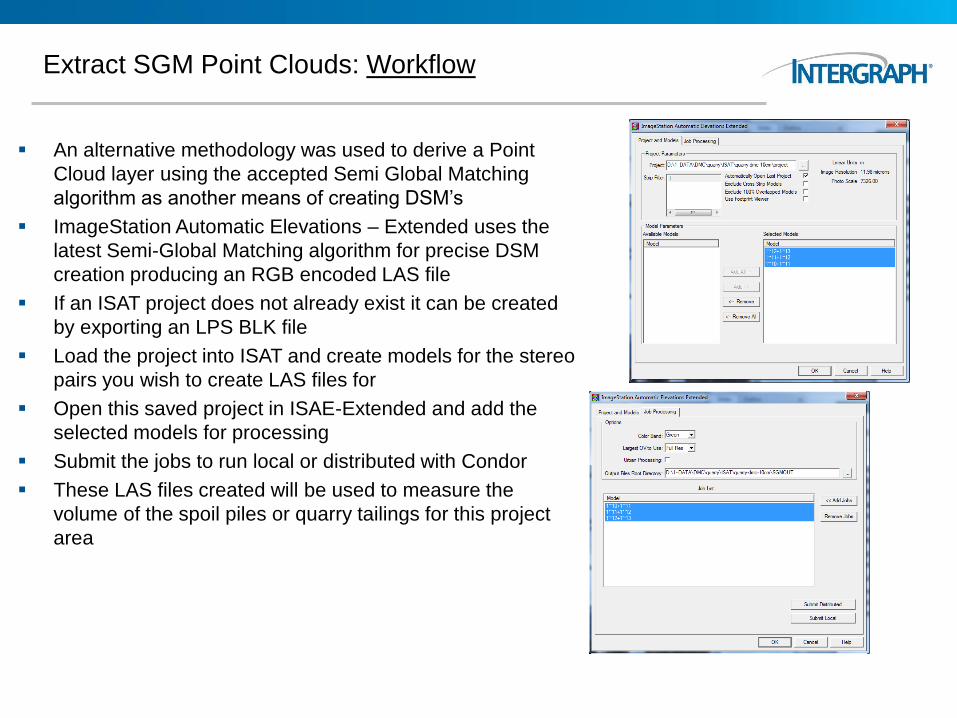
Extract SGM Point Clouds: Workflow
An alternative methodology was used to derive a Point
Cloud layer using the accepted Semi Global Matching
algorithm as another means of creating DSM’s
ImageStation Automatic Elevations – Extended uses the
latest Semi-Global Matching algorithm for precise DSM
creation producing an RGB encoded LAS file
If an ISAT project does not already exist it can be created
by exporting an LPS BLK file
Load the project into ISAT and create models for the stereo
pairs you wish to create LAS files for
Open this saved project in ISAE-Extended and add the
selected models for processing
Submit the jobs to run local or distributed with Condor
These LAS files created will be used to measure the
volume of the spoil piles or quarry tailings for this project
area
ImageStation 2013
21
• Semi-Global Matching (SGM)
• Production-oriented dense matching solution
• Industry-standard method for dense surface correlation
• Same algorithm used in Leica’s XPro generalized for “frame” data
• Support for DMC’s I&II, RCD30, UltraCam
• Multi-core, multi-threaded (will deliver eight processing licenses)
• Outputs LAS files (point clouds)
• Applications
• City modeling
• True Ortho
• Forensics
• Visualization
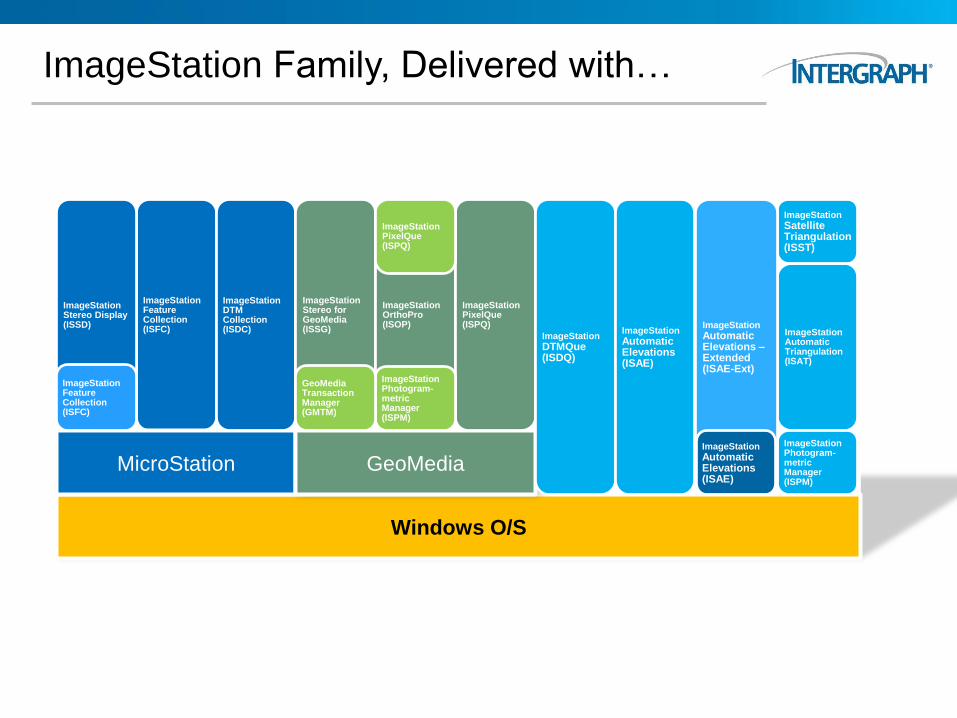
ImageStation Family, Delivered with…
Windows O/S
ImageStation Feature Collection (ISFC)
MicroStation
ImageStation DTM Collection (ISDC)
ImageStation Stereo Display (ISSD)
GeoMedia
ImageStation Stereo for GeoMedia (ISSG) ImageStation
Automatic Triangulation (ISAT)
ImageStation OrthoPro (ISOP)
ImageStation PixelQue (ISPQ)
ImageStation DTMQue (ISDQ)
ImageStation Automatic Elevations (ISAE)
ImageStation Photogram-metric Manager (ISPM)
ImageStation Satellite Triangulation (ISST)
ImageStation Automatic Elevations –Extended (ISAE-Ext)
ImageStation PixelQue (ISPQ)
ImageStation Photogram-metric Manager (ISPM)
GeoMedia Transaction Manager (GMTM)
ImageStation Feature Collection (ISFC)
ImageStation Automatic Elevations (ISAE)




![Real-Time Dense Stereo Matching with ELAS on FPGA Accelerated Embedded Devices · 2018-02-21 · arXiv:1802.07210v1 [cs.CV] 20 Feb 2018 1 Real-Time Dense Stereo Matching with ELAS](https://img.dokumen.tips/doc/110x75/5ea4d79358527f6f3377473e/real-time-dense-stereo-matching-with-elas-on-fpga-accelerated-embedded-devices-2018-02-21.jpg)
























