Embed Size (px)
Citation preview

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 1
Danmarks Tekniske Universitet
Skriftlig prøve, den 6. juni 2013
Kursus navn: Indledende Medicinsk Billedanalyse
Kursusnr: 02511
Varighed: 4 timer
Tilladte hjælpemidler: Alle hjælpemidler er tilladt.
Vægtning: Alle opgaver vægtes ligeligt.
Navn:
Underskrift:
Bord nr.:
Opgave 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15Svar
Opgave 16 17 18 19 20 21 22 23 24 25Svar
Svarmulighederne for hvert spørgsmål er nummereret fra 1 til 6. For hvertspørgsmål skal nummeret på den valgte svarmulighed indføres i skemaetovenfor. Indføres et forkert nummer i skemaet kan dette rettes ved at "sværte"detforkerte nummer over og anføre det rigtige nummer nedenunder. Er der tvivlom meningen med en rettelse, betragtes spørgsmålet som ubesvaret. KUNFORSIDEN SKAL AFLEVERES. Afleveres blankt eller forlades ek-samen i utide, skal forsiden alligevel afleveres. Kladde, mellemregninger ogbemærkninger tillægges ingen betydning, kun tallene indført ovenfor reg-istreres.
Der gives 5 points for et korrekt svar og -1 for et ukorrekt svar. Ubesvaredespørgsmål eller et 6-tal (svarende til "ved ikke") giver 0 points. Det antalpoints, der kræves for, at et sæt anses for tilfredsstillende besvaret, afgøresendeligt ved censureringen af sættene.
HUSK at forsyne opgaveteksten med navn, underskrift og bord nummer.

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 2
Opgave 13.1
Punkterne (x, y) = (3, 4) og (x, y) = (5, 4) transformeres med transforma-tionsmatricen:
[0.8 1.11.2 0.7
](1)
og herefter beregnes afstanden mellem dem. Afstanden er:
1. 2.88
2. 1.92
3. 1.23
4. 2.01
5. 1.86
6. Ved ikke
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 3
Opgave 13.2
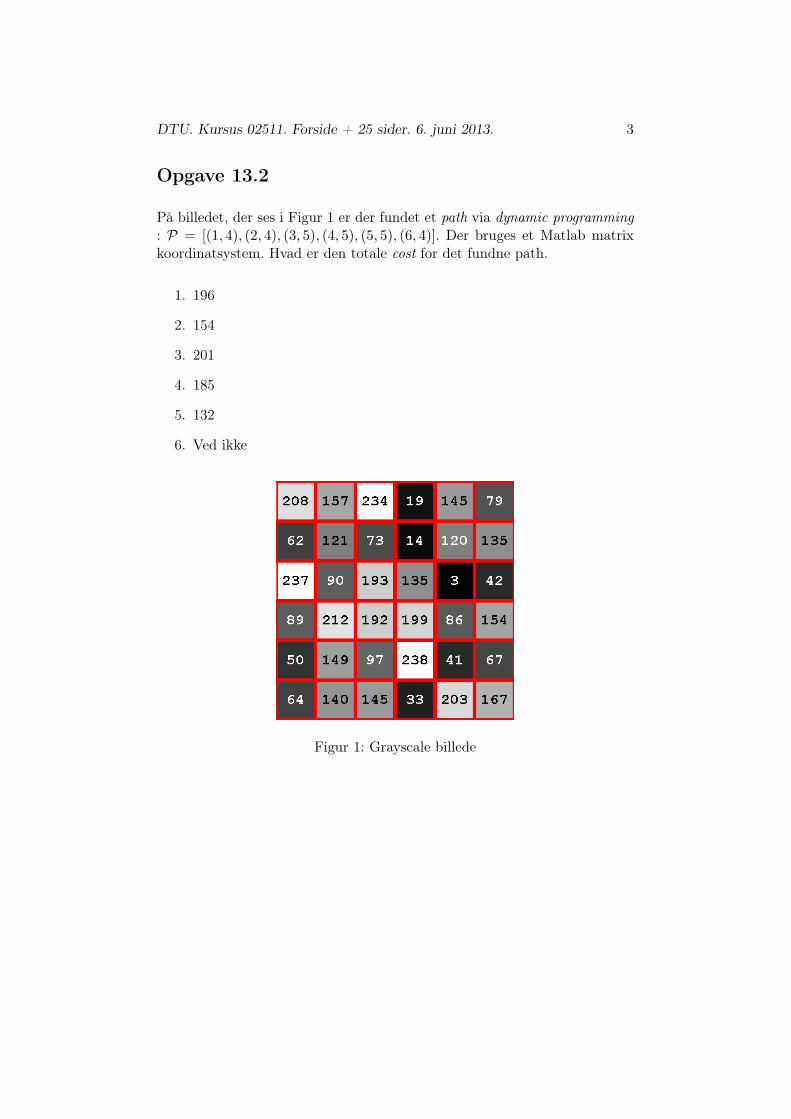
På billedet, der ses i Figur 1 er der fundet et path via dynamic programming: P = [(1, 4), (2, 4), (3, 5), (4, 5), (5, 5), (6, 4)]. Der bruges et Matlab matrixkoordinatsystem. Hvad er den totale cost for det fundne path.
1. 196
2. 154
3. 201
4. 185
5. 132
6. Ved ikke
Figur 1: Grayscale billede

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 4
Opgave 13.3
Et kamera med field-of-view på 6◦ har taget et billede af pupilen i et øje,der lige præcis passer i billedet, når kameraet holdes i en afstand af 5 cm tiløjets centrum. Pupilen er en cirkel. Hvad er arealet af pupilen:
1. 0.33 cm2
2. 0.64 cm2
3. 0.18 cm2
4. 0.50 cm2
5. 0.22 cm2
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 5
Opgave 13.4
Et 6 x 6 billede fyldes ud med værdier, der er givet ved gray level run lengthkodningen: 4, 4, 6, 6, 3, 200, 4, 110, 5, 20, 6, 55, 8, 13. Billedet har et 0-baseret (x,y) koordinatsystem med origo i øvre venstre hjørne. Der udføresen filtrering med en 3x3 vertical Prewitt filter kernel. Hvad bliver resultateti den pixel, der har koordinater (2,3)?
1. 5
2. 0
3. 200
4. 60
5. 55
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 6
Opgave 13.5
Et 6 x 6 billede kan beskrives med en gray level run length kodning: 4, 4, 6,6, 3, 200, 4, 110, 5, 20, 6, 55, 8, 13. Hvad er compression ratio?
1. 0.8
2. 1.4
3. 2.6
4. 0.4
5. 1.7
6. Ved ikke
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 7
Opgave 13.6
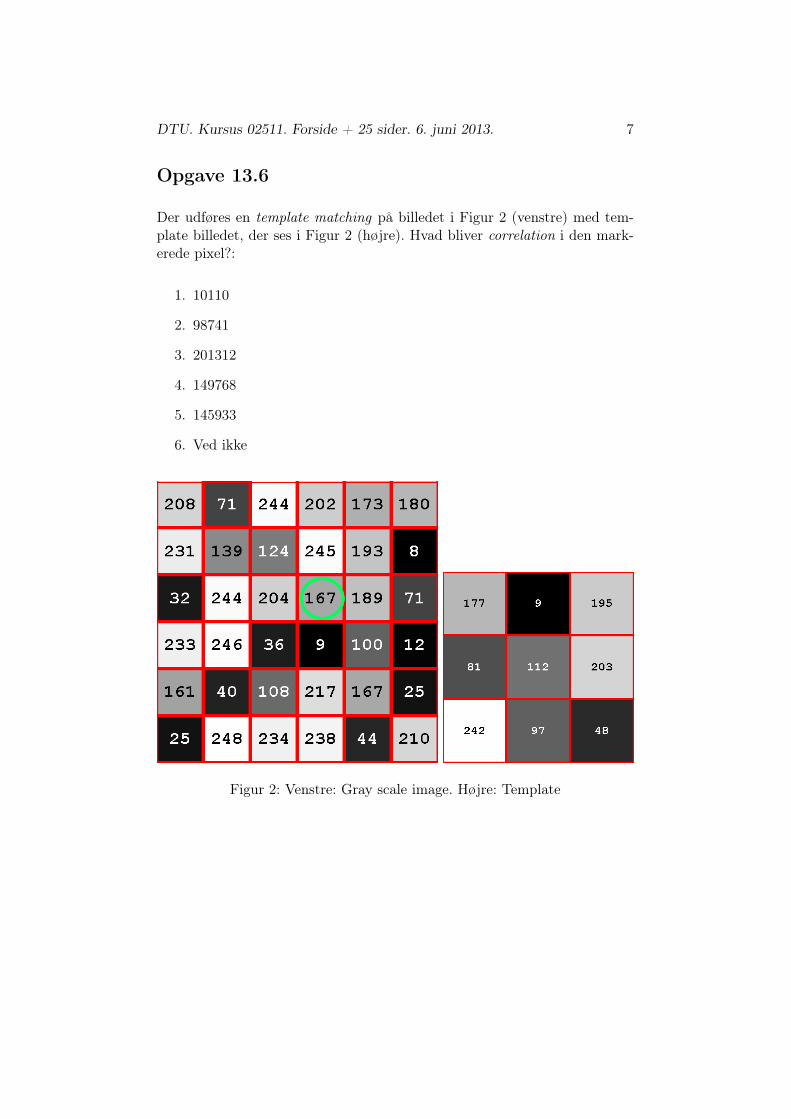
Der udføres en template matching på billedet i Figur 2 (venstre) med tem-plate billedet, der ses i Figur 2 (højre). Hvad bliver correlation i den mark-erede pixel?:
1. 10110
2. 98741
3. 201312
4. 149768
5. 145933
6. Ved ikke
Figur 2: Venstre: Gray scale image. Højre: Template

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 8
Opgave 13.7
Der udføres en template matching med template billedet, der ses i Figur 2(højre) på billedet i Figur 2 (venstre). Hvad bliver normalized cross correla-tion i den markerede pixel?
1. 0.70
2. 0.47
3. 0.56
4. 0.87
5. 0.93
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 9
Opgave 13.8
På billedet der ses i Figur 3 udføres der en filtrering med 3x3 minimum rankfilter. På resultatbilledet udføres der derefter en filtrering med en Horizontal3x3 Sobel Kernel. Hvad bliver pixelværdien i den markerede pixel?
Figur 3: Grayscale billede
1. -34
2. -55
3. 5
4. 35
5. 65
6. Ved ikke
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 10
Opgave 13.9
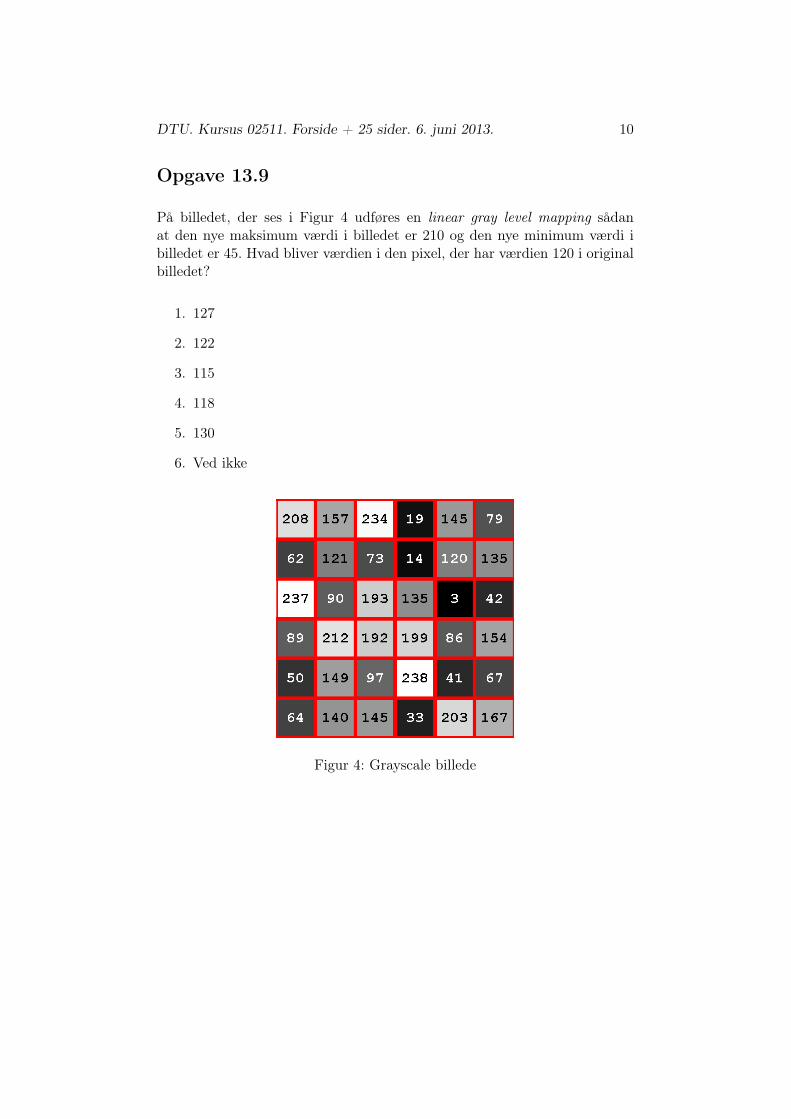
På billedet, der ses i Figur 4 udføres en linear gray level mapping sådanat den nye maksimum værdi i billedet er 210 og den nye minimum værdi ibilledet er 45. Hvad bliver værdien i den pixel, der har værdien 120 i originalbilledet?
1. 127
2. 122
3. 115
4. 118
5. 130
6. Ved ikke
Figur 4: Grayscale billede

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 11
Opgave 13.10
På billedet i Figur 5 udføres
(I SE1) • SE2,
hvor SE1 og SE2 ses i Figur 6. Hvor mange forgrundspixels er der i resultat-billedet?
Figur 5: Binært billede I. Hvide pixels er forgrund (1) og sorte pixels erbaggrund (0).
Figur 6: Venstre: SE1, Højre: SE2. Hvide pixels er forgrund (1) og sortepixels er baggrund (0). Centeret er markeret med et sort kryds.
1. 2
2. 4
3. 3
4. 7
5. 5
6. Ved ikke
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 12
Opgave 13.11
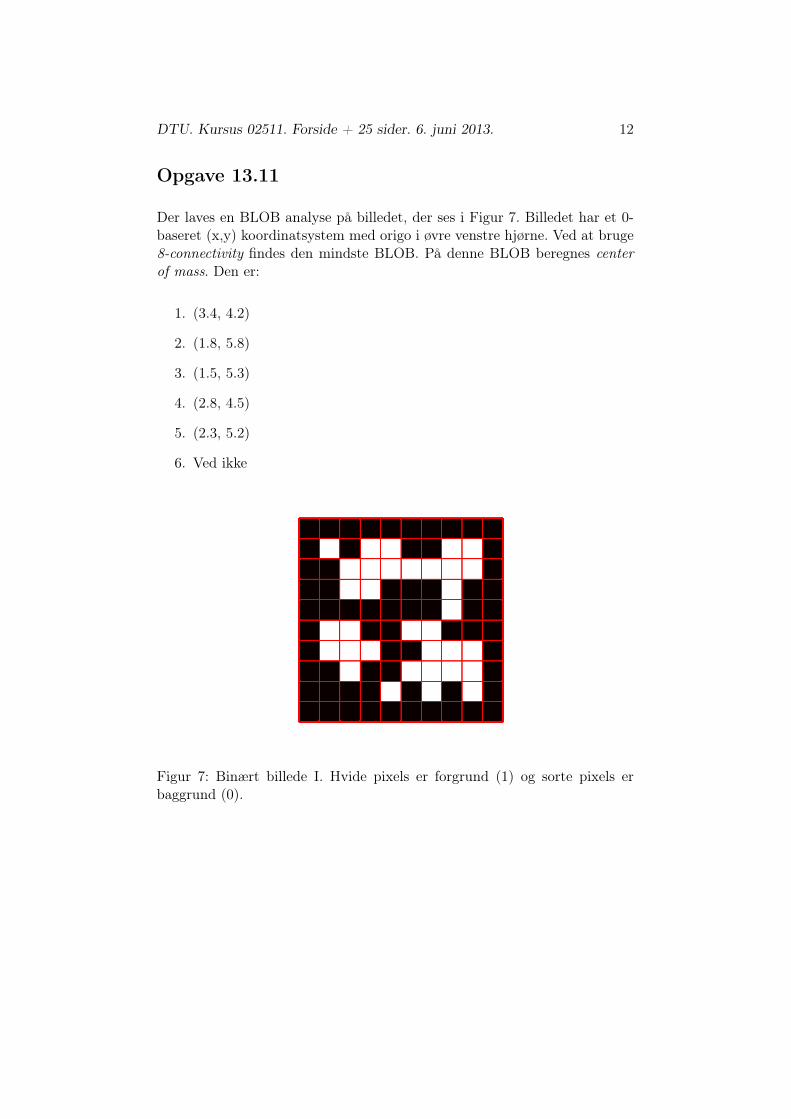
Der laves en BLOB analyse på billedet, der ses i Figur 7. Billedet har et 0-baseret (x,y) koordinatsystem med origo i øvre venstre hjørne. Ved at bruge8-connectivity findes den mindste BLOB. På denne BLOB beregnes centerof mass. Den er:
1. (3.4, 4.2)
2. (1.8, 5.8)
3. (1.5, 5.3)
4. (2.8, 4.5)
5. (2.3, 5.2)
6. Ved ikke
Figur 7: Binært billede I. Hvide pixels er forgrund (1) og sorte pixels erbaggrund (0).

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 13
Opgave 13.12
På billedet, der ses i Figur 8 laves en minimum distance classification medto klasser. Klasse 1 har middelværdi 117 og klasse 2 har middelværdi 83. Depixels, der tilhører klasse 1 udgør en BLOB, som har en bounding box ratiopå:
1. 0.5
2. 0.8
3. 1.0
4. 1.1
5. 1.6
6. Ved ikke
Figur 8: Grayscale billede
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 14
Opgave 13.13
Der laves en BLOB analyse på billedet, der ses i Figur 7. Ved at bruge 4-connectivity findes den største BLOB. På denne BLOB beregnes arealet ogcompactness. Herefter udføres en BLOB classification i forhold til de klasser,der er vist i nedenstående tabel. Der bruges klassifikation uden normalisering.
Klasse Areal CompactnessType 1 13 0.2Type 2 14 0.4Type 3 16 0.5Type 4 16 0.6Type 5 17 0.9
BLOB’en bliver klassificeret som:
1. Type 1
2. Type 2
3. Type 3
4. Type 4
5. Type 5
6. Ved ikke
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 15
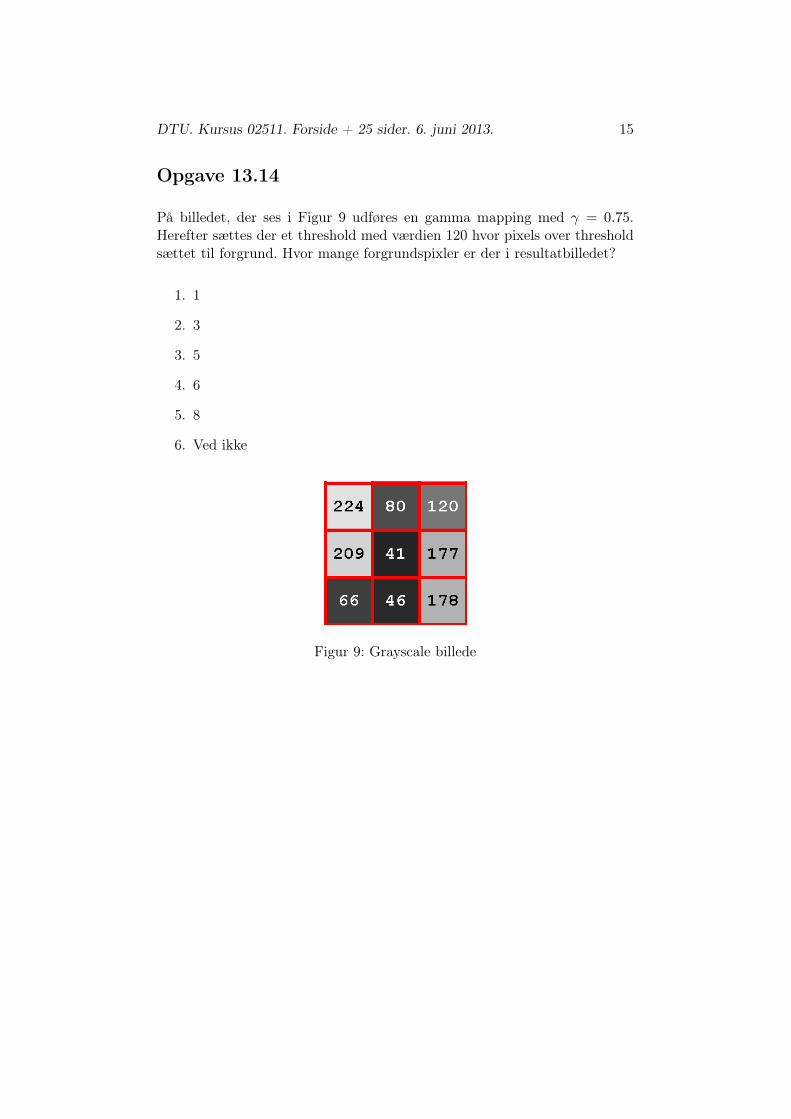
Opgave 13.14
På billedet, der ses i Figur 9 udføres en gamma mapping med γ = 0.75.Herefter sættes der et threshold med værdien 120 hvor pixels over thresholdsættet til forgrund. Hvor mange forgrundspixler er der i resultatbilledet?
1. 1
2. 3
3. 5
4. 6
5. 8
6. Ved ikke
Figur 9: Grayscale billede
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 16
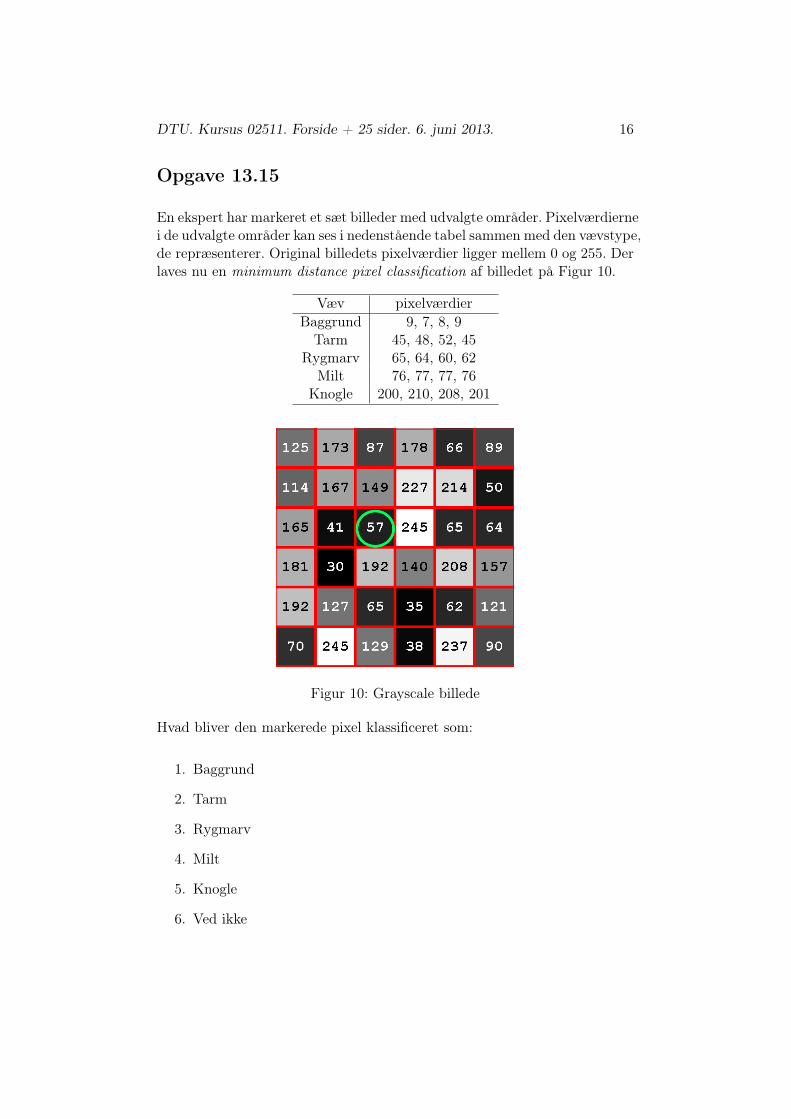
Opgave 13.15
En ekspert har markeret et sæt billeder med udvalgte områder. Pixelværdiernei de udvalgte områder kan ses i nedenstående tabel sammen med den vævstype,de repræsenterer. Original billedets pixelværdier ligger mellem 0 og 255. Derlaves nu en minimum distance pixel classification af billedet på Figur 10.
Væv pixelværdierBaggrund 9, 7, 8, 9Tarm 45, 48, 52, 45
Rygmarv 65, 64, 60, 62Milt 76, 77, 77, 76
Knogle 200, 210, 208, 201
Figur 10: Grayscale billede
Hvad bliver den markerede pixel klassificeret som:
1. Baggrund
2. Tarm
3. Rygmarv
4. Milt
5. Knogle
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 17
Opgave 13.16
Hvilket af følgende udsagn er forkert?
1. focal length for en simpel linse kan ikke ændres.
2. Et billede vil typisk få større kontrast når der bruges histogram stretch-ing
3. Et median filter er bedre til at fjerne ridser end et mean filter.
4. En image gradient giver for hvert punkt, den retning med størst æn-dring i billedet.
5. Et histogram over pixelværdier kan beskrives via en Gaussfordelingmed tre parametre.
6. Ved ikke
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 18
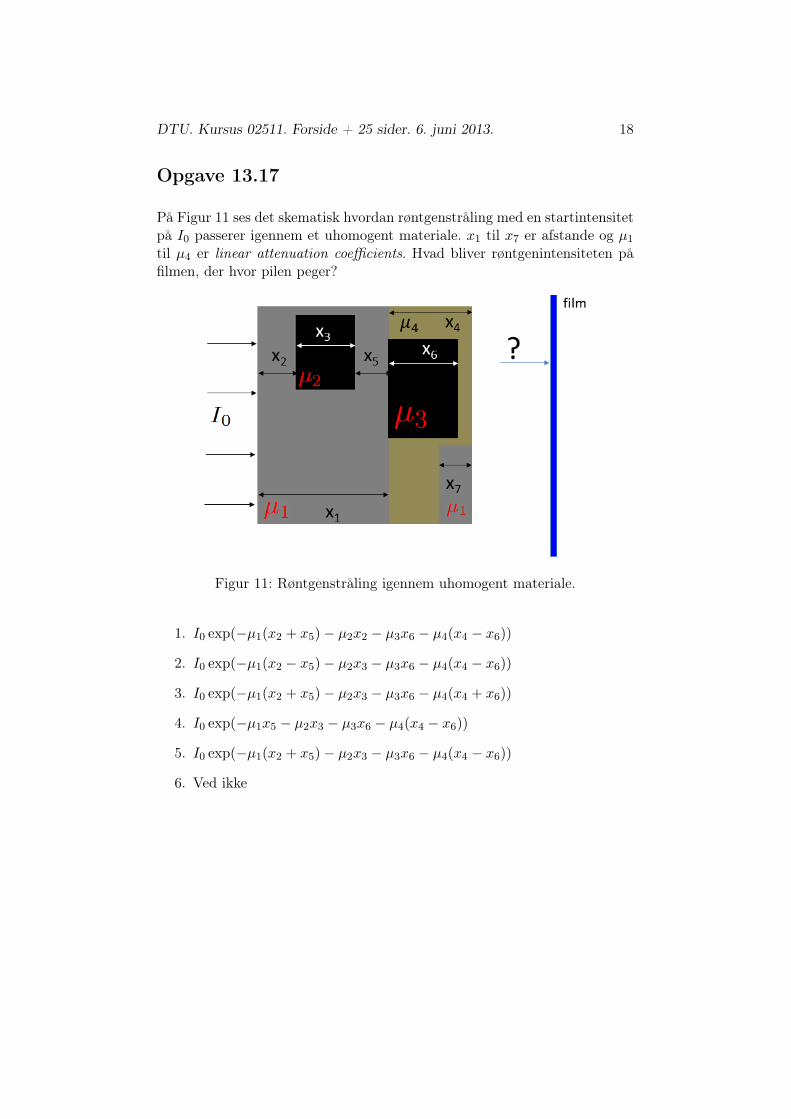
Opgave 13.17
På Figur 11 ses det skematisk hvordan røntgenstråling med en startintensitetpå I0 passerer igennem et uhomogent materiale. x1 til x7 er afstande og µ1til µ4 er linear attenuation coefficients. Hvad bliver røntgenintensiteten påfilmen, der hvor pilen peger?
Figur 11: Røntgenstråling igennem uhomogent materiale.
1. I0 exp(−µ1(x2 + x5)− µ2x2 − µ3x6 − µ4(x4 − x6))
2. I0 exp(−µ1(x2 − x5)− µ2x3 − µ3x6 − µ4(x4 − x6))
3. I0 exp(−µ1(x2 + x5)− µ2x3 − µ3x6 − µ4(x4 + x6))
4. I0 exp(−µ1x5 − µ2x3 − µ3x6 − µ4(x4 − x6))
5. I0 exp(−µ1(x2 + x5)− µ2x3 − µ3x6 − µ4(x4 − x6))
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 19
Opgave 13.18
På Figur 12 ses det skematisk hvordan røntgenstråling med en startintensitetpå I0 passerer igennem et uhomogent materiale. x1 til x7 er afstande og µ1til µ4 er linear attenuation coefficients. Der måles to udgangsintensiteter IAog IB. Hvad er forholdet
IAIB
:
1. exp(−µ1(x2 − x1 − x7)− µ3x6 − µ4(x7 − x6))
2. exp(−µ1(x2 + x5 − x1 + x7)− µ2x3 − µ4(−x6))
3. exp(−µ1(x2 − x1 + x7)− µ2x3 − µ3x6 − µ4(x6 − x7))
4. exp(−µ1(x2 + x5 − x1 − x7)− µ2x3 − µ3x6 − µ4(x7 − x6))
5. exp(−µ1(x2 − x5 + x1 + x7)− µ2x3 − µ3x6 − µ4(x7 − x6))
6. Ved ikke
Figur 12: Røntgenstråling igennem uhomogent materiale.

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 20
Opgave 13.19
På et gråtone billede (0-baseret (x,y)-koordinatsystem med origo i øverstevenstre hjørne) bruges der bilinear interpolation for at finde den interpoleredeværdi i punktet (x, y) = (2.8, 1.7). Billedet ses i Figur 13 hvor punktet ermarkeret med en grøn cirkel. Det er defineret så en koordinat er midt i pixlen,det vil sige at midten af pixlen med værdi 109 har koordinaterne (2, 1). Deninterpolerede værdi bliver:
1. 111
2. 117
3. 141
4. 164
5. 157
6. Ved ikke
Figur 13: Grayscale billede

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 21
Opgave 13.20
Et binært billede (0-baseret (x,y)-koordinatsystem med origo i øverste ven-stre hjørne) har en binary chain coding på (4,2)(0,7,5,5,4,3,1). På billedetudføres en morphological erosion med SE1 fra Figur 14.
Figur 14: Venstre: SE1, Højre: SE2. Hvide pixels er forgrund (1) og sortepixels er baggrund (0). Centeret er markeret med et sort kryds.
Hvor mange forgrundspixels er der i resultatbilledet?
1. 4
2. 2
3. 3
4. 7
5. 5
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 22
Opgave 13.21
Et binært billede (0-baseret (x,y)-koordinatsystem med origo i øverste ven-stre hjørne) har en binary chain coding på (4,2)(0,7,5,5,4,3,1). På billedet ud-føres en morphological dilation med SE2 fra Figur 14. Herefter kodes billedetmed en binary run-length code. Resultatet bliver:
1. [1; (3, 6)], [3; (2, 7)], [2; (1, 7)], [4; (1, 7)], [5; (1, 6)], [6; (2, 5)]
2. [1; (3, 6)], [2; (2, 7)], [4; (1, 7)], [5; (1, 6)], [6; (2, 5)]
3. [1; (3, 6)], [2; (2, 7)], [3; (1, 7)], [4; (1, 7)], [6; (2, 5)]
4. [1; (3, 6)], [2; (2, 7)], [3; (1, 7)], [4; (2, 7)], [5; (1, 6)]
5. [1; (3, 6)], [2; (2, 7)], [3; (1, 7)], [4; (1, 7)], [5; (1, 6)], [6; (2, 5)]
6. Ved ikke
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 23
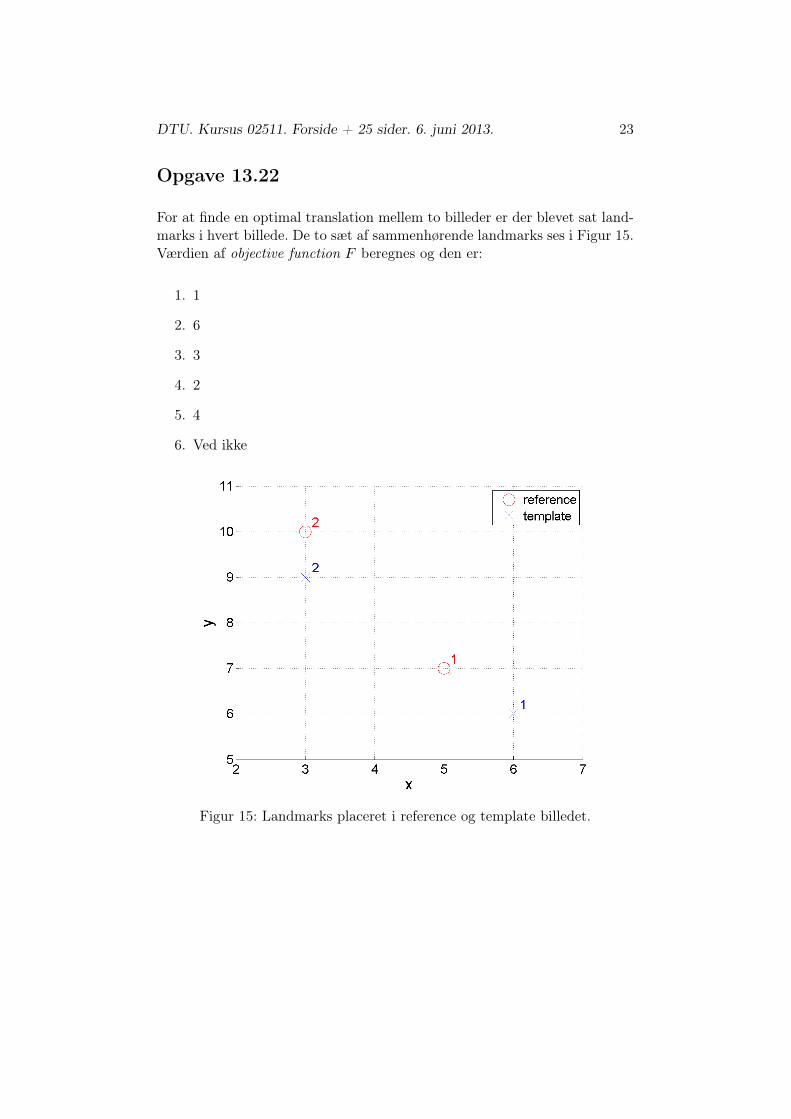
Opgave 13.22
For at finde en optimal translation mellem to billeder er der blevet sat land-marks i hvert billede. De to sæt af sammenhørende landmarks ses i Figur 15.Værdien af objective function F beregnes og den er:
1. 1
2. 6
3. 3
4. 2
5. 4
6. Ved ikke
Figur 15: Landmarks placeret i reference og template billedet.
DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 24
Opgave 13.23
Ved at bruge de to sæt af sammenhørende landmarks, der ses i Figur 15 erden optimale translation, der bringer landmarks fra reference billedet over itemplate billedet fundet. Den er:
1. (0.5, -1)
2. (-0.5, -1)
3. (-0.5, -1)
4. (1, -1)
5. (-1, 0.5)
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 25
Opgave 13.24
Med et kamera med en focal length på 55 mm og en CCD chip, der måler7.5 mm x 6.5 mm tages billeder, der har størrelsen 3000 x 2600 pixels. Detkan antages at b = f . Kameraet har taget to billeder af en kørende bil fra100 meters afstand. Kameraet flytter sig ikke og bilen kører med konstanthastighed parallelt med billedplanet. På et sekund har bilen flyttes sig 2000pixels i kameraet. Hvor hurtigt kører bilen?
1. 11.3 m/s
2. 9.1 m/s
3. 35.8 m/s
4. 6.7 m/s
5. 19.2 m/s
6. Ved ikke

DTU. Kursus 02511. Forside + 25 sider. 6. juni 2013. 26
Opgave 13.25
Hvilket af følgende udsagn er forkert?
1. Der skal være punkt korrespondence for at kunne bruge Procrustesanalyse.
2. Et backtracing image bruges til at finde et optimalt path igennem etbillede.
3. Et objekt i et billede bliver større når en rigid body transformationbruges
4. Transformationsmatricer kan ganges sammen for at sammensætte trans-formationer
5. Bayesian classification udnytter prior viden om fordeling af pixelværdier.
6. Ved ikke





























