Embed Size (px)
Citation preview

Matemática IIIVladimiro Contreras Tito
7 de enero de 2012
Resumen
En esta parte se determinará los elementos geometricos que distinguena una curva regular.
Índice
Índice 1
1. Curvas regulares 2
2. Reparametrización de una curva parametrizada 32.1. Longitud de arco . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2. Longitud de arco como parámetro . . . . . . . . . . . . . . . . . . 6
3. Vectores Tangente unitario, Normal principal y Binormal 73.1. Vector tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2. Vector normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.3. Vector binormal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4. Curvatura y Torsión 104.1. Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104.2. Círculo de Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . 124.3. Torsión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1

1 CURVAS REGULARES
1. Curvas regularesDefinición 1.1. Se dice que una curva C ⊂ Rn es una curva paramétriza-da. Si existe una función vectorial α : [a, b] → Rn tal que α([a, b]) = C.A la función α(t) = (α1(t), α2(t), ..., αn(t)) se le llama parametrización de lacurva C.
Ejemplo 1.1. Sea C una curva originada por la intersección del cilindro(x− 2)2 + y2 = 4 y el plano x + z = 4.¿ Es C una curva parametrizada?
SoluciónDe la ecuación del cilindro se tiene que x = 2 + 2cos(t) e y = 2sen(t). Luego
reemplazando estos resultados en la ecuación del plano x + z = 4 obtenemosz = 2− 2sen(t). Entonces la curva C esta parametrizada por la función vectorialα(t) = (2 + 2cos(t), 2sen(t), 2− 2sen(t)) para todo t ∈ [0, 2π]
Figura 1: Interseccióndel cilindro con el plano
Figura 2: Grafica de lacurva C
Definición 1.2. Sea C ⊂ Rn una curva parametrizada por α : [a, b] → Rn.
1. Se dice que C es una curva con puntos dobles si: α(t1) = α2(t), t1 6= t2
2. Se dice que C es una curva simple si no posee puntos dobles
3. Se dice que C es una curva cerrada si: α(a) = α(b)
4. Se dice que C es una curva regular, si α(t) es de clase C ′ y α′(t) 6= 0 ,∀ t ∈ [a, b].
NOTA 1.1.
Una curva regular es aquella curva que admite rectas tangentes en todos lospuntos α(t) para todo t ∈ Domα.
V. Contreras T. Página 2

2 REPARAMETRIZACIÓN DE UNA CURVA PARAMETRIZADA
Ejemplo 1.2. ¿la curva C definida por f(t) = (t3 − 4t, t2 − 4) es una curva conpuntos dobles?. ¿Es regular?
Soluciónf(t1) = f(t2) entonces (t31 − 4t1, t
21 − 4) = (t32 − 4t2, t
22 − 4) Luego
t31 − 4t1 = t32 − 4t2 (1)t21 − 4 = t22 − 4 (2)
De (2) se tiene que t1 = t2 ó t1 = −t2. El primer resultado no se considera ya queestamos buscando puntos dobles. Luego reemplazando t1 = −t2 en (1) se tieneque: t = 0 ó t2 = 2 ó t2 = −2. Luego consideramos como t1 = 2 y t2 = 2. Por lotanto C es una curva con puntos dobles.
Finalmente veamos la regularidad de C.f ′(t) = (3t2 − 4, 2t), luego f ′(t) 6= 0 para todo t ∈ Domf = R y f ∈ C1. por
lo tanto C es una curva regular.
Figura 3: curva C definida por la función f .
2. Reparametrización de una curva parametriza-da
Definición 2.1. Sea λ : [a, b] → Rn la parametrización de la curva C. Decimosque µ : [c, d] → Rn es una repametrización de λ si y solo si existe una funciónϕ : [a, b] → [c, d] monótona y sobreyectiva tal que λ = µ ◦ ϕ
Ejemplo 2.1. Reparametrice la curva C definida por la función
λ(t) = (cos(t), sen(t)) , t ∈ [0, 2π],
de tal menera que esté definida sobre el intervalo [0, 1] y que:
1. mantenga su orientación
V. Contreras T. Página 3

2 REPARAMETRIZACIÓN DE UNA CURVA PARAMETRIZADA
2. invierta la orientación.
Solución
1. Definamos ϕ(t) = t2π
y notemos que ϕ es una función sobreyectiva y monó-tona creciente (ϕ′(t) > 0). Como λ(t) = µ(ϕ(t)) V λ(t) = µ(k) y dado quet = 2πk se tiene:
µ(k) = (cos(2πk), sen(2πk)) , k ∈ [0, 1]
Figura 4: t−02π−0
= k−01−0
2. Definamos ϕ(t) = 1 − t2π
y notemos que ϕ es una función sobreyectiva ymonótona decreciente (ϕ′(t) < 0). Como λ(t) = µ(ϕ(t)) V λ(t) = µ(k) ydado que t = 2π − 2πk se tiene:
µ(k) = (cos(2πk),−sen(2πk)) , k ∈ [0, 1]
Figura 5: t−02π−0
= 1−k1−0
V. Contreras T. Página 4

2 REPARAMETRIZACIÓN DE UNA CURVA PARAMETRIZADA
2.1. Longitud de arco
Definición 2.2. Si C es la curva definida por la función vectorialα(t) = (α1(t), α2(t), ..., αn(t)) y α′1, α
′2, ..., α
′n son continuas en el intervalo cerra-
do [a, b] entonces si L unidades es la longitud de arco de la curva medida desdeel punto f(a) hasta el punto f(b),
L =
∫ b
a
‖ α′(t) ‖ dt
Ejemplo 2.2. Halle la longitud de la curva C descrita por función
f(t) = (−cos(t), 0) , t ∈ [π
2,3π
2]
SoluciónSe tiene que
L =
∫ b
a
‖ f ′(t) ‖ dt =
∫ 3π2
π2
| sen(t) | dt =
∫ π
π2
sen(t)dt−∫ 3π
2
π
sen(t)dt = 2
observemos que la traza del la curva C es el segmento de recta cuya longitud es1. Este ejemplo nos demuestra en general, que la longitud de arco de una curvano es la longitud de su traza.
Figura 6: Traza de f
NOTA 2.1.
La curva C descrita por la función λ(t) = (t, φ(t)) , ∀t ∈ [0, 1] donde
φ(t) =
{tsen( π
2t) si t 6= 0
0 si t = 0
es una curva que no se puede hallar su longitud de arco, ya que es una curva queno es de clase C1.
V. Contreras T. Página 5

2 REPARAMETRIZACIÓN DE UNA CURVA PARAMETRIZADA
Figura 7: Traza de λ
2.2. Longitud de arco como parámetro
Sea C la curva en R3 definida por la función vectorialα(t) = (α1(t), α2(t), ..., αn(t)). Si α es de clase C1 entonces se dice que dentrode dicho intervalo C es rectificable (esto es, la longitud de su arco entre dospuntos puede medirse). Si s unidades es la longitud de arco medida desde unpunto arbitrario α(t0) hasta un punto cualquiera α(t), de tal manera que s au-menta cuando t aumenta, entonces
s =
∫ t
t0
‖ α′(u) ‖ du
Asi s será positivo si la longitud de arco mide en la dirección en que t aumentay s será negativo si se mide en la dirección en que t disminuye. por lo tanto s esuna distancia dirigida. A cada valor de s le corresponde un único punto P de lacurva C. En consecuencia, las coordenadas de P son funciones de s y s es funciónde t. Entonces la curva puede definirse por una función vectorial del parámetros.
Teorema 2.1. Sea µ : [c, d] → Rn una función vectorial de clase C1 en [c, d].Las siguientes afirmaciones son equivalentes:
1. µ es parametrizado por longitud de arco.
2. ‖µ′(s)‖ = 1 para todo s ∈ [c, d]
1 ⇔ 2
Ejemplo 2.3. Sea C la curva descrita por la función
f(t) = (acos(kt), asen(kt), bkt) k > 0 , t ≥ 0
describe la curva C en términos de la longitud de arco.
Solución
f ′(t) = (−aksen(kt), akcos(kt), bk)
‖f ′(t)‖ =√
a2k2 + b2k2
V. Contreras T. Página 6

3 VECTORES TANGENTE UNITARIO, NORMAL PRINCIPAL YBINORMAL
s =
∫ t
0
‖f ′(u)‖du = k√
a2 + b2t V t =s
k√
a2 + b2∀s ≥ 0
Así,
µ(s) = (acos(s√
a2 + y2), asen(
s√a2 + y2
),sb√
a2 + y2)
(se verifica, ‖µ′(s)‖ = 1).
3. Vectores Tangente unitario, Normal principaly Binormal
Sea f : [a, b] → R3 una curva regular sobre [a, b] definida por f(t) = (x(t), y(t), z(t)).Es decir f ′(t) 6= 0 ∀t ∈ [a, b].
3.1. Vector tangente
Definición 3.1. 1. El vector f ′(t) es el vector tangente a la curva C en elpunto f(t) y sigue la dirección de la curva.
2. El vector T (t) = f ′(t)‖f ′(t)‖ es el vector tangente unitario en el punto f(t)
Figura 8:
Observación 3.1.
1. Como s(t) =∫ t
0‖f ′(u)‖du , ∀t ∈ [a, b] es la longitud de arco entonces
T (t) = f ′(t)s′(t)
luego f ′(t) = T (t)s′(t)
2. Se cumple T ′(t) es ortogonal al vector T (t), esto es, T ′(t).T (t) = 0. Enefecto como T es unitario,
‖T‖ = 1 ⇒ ‖T‖2 = 1 ⇒ T.T = 1
Luego derivando se tiene:
T ′.T + T.T ′ = 0 ⇒ T ′.T = 0 ∀t ∈ [a, b]
V. Contreras T. Página 7

3 VECTORES TANGENTE UNITARIO, NORMAL PRINCIPAL YBINORMAL
3. Si para algún t0, f ′(t0) = 0 entonces:
T (t0) = lımt→t0
f ′(t)
‖f ′(t)‖= lım
t→t0T (t)
si existe el limite.
3.2. Vector normal
Definición 3.2. 1. Cualquier vector que pasa por el punto f(t) de una curvaC y es ortogonal a la tangente f ′(t) en ese punto, se llama normal a lacurva.
2. El vector T ′(t) se llama normal principal a la curva C en el punto f(t).
3. Si T ′(t) 6= 0 entonces N(t) = T ′(t)‖T ′(t)‖ es el vector unitario normal prin-
cipal.
Observación 3.2.
1. Si derivamos f ′(t) = T (t)s′(t) se tiene el vector aceleración
f ′′(t) = s′′(t)T (t) + s′(t)T ′(t)
y como T ′(t) = N(t)‖T ′(t)‖, se tiene
f ′′(t) = s′′(t)T (t) + s′(t)‖T ′(t)‖N(t)
Esta última ecuación expresa el vector aceleración como una combinaciónlineal de los vectores T y N . Geométricamente f ′′ se encuentra en el planodeterminado por T y N .
2. La componente tangencial del vector aceleración es: aT = s′′ = f ′.f ′′
‖f ′‖
3. La componente normal del vector aceleración es aN = s′‖T ′‖
3.3. Vector binormal
Definición 3.3. Se llama vector binormal al vector B(t) = T (t)×N(t).
NOTA 3.1.
1. El plano que pasa por f(t0) determinado por los vectores T (t0) y N(t0) sellama plano osculador de C en f(t0) y su ecuación es:
B(t0)((x, y, z)− f(t0)) = 0
V. Contreras T. Página 8

3 VECTORES TANGENTE UNITARIO, NORMAL PRINCIPAL YBINORMAL
Figura 9:
2. El plano que pasa por f(t0) determinado por los vectores N(t0) y B(t0) sellama plano normal de C en f(t0) y su ecuación es:
T (t0)((x, y, z)− f(t0)) = 0
3. El plano que pasa por f(t0) determinado por los vectores B(t0) y T (t0) sellama plano rectificante de C en f(t0) y su ecuación es:
N(t0)((x, y, z)− f(t0)) = 0
4. En cada punto f(t) de C los vectores T (t), N(t) y B(t) forman una basaortonormal de R3
Figura 10:
V. Contreras T. Página 9

4 CURVATURA Y TORSIÓN
Teorema 3.1. Si C es una curva en R3 descrita por f entonces
a) B(t) =f ′(t)× f ′′(t)
‖f ′(t)× f ′′(t)‖b) N(t) = B(t)×T (t) =
(f ′(t)× f ′′(t))× f ′(t)
‖(f ′(t)× f ′′(t))× f ′(t)‖
4. Curvatura y TorsiónUno de los problemas fundamentales de la geometría es determinar con exac-
titud cuantificandolos, los elementos geometricos que distinguen unas figuras deotras. Por ejemplo, los segmentos de recta quedan determinados unicamente porsu longitud, las circunferencias por su radio etc. Se demuestra que estos proble-mas se pueden resolver en general para curvas regulares suficientemente suaves.Veremos que una curva regular viene determinada por sólo dos cantidades es-calares llamadas curvatura y torsión, las cuales se expresan como funcionesdel parámetro natural(longitud de arco).
Podemos imaginar la traza de una curva R3 como el resultado de someteruna recta a un proceso de combamiento (curvatura) y otro de atornillamiento(torsión).
4.1. Curvatura
La idea general que se persigue en el estudio de la curvatura de una curva esla de medir la rapidez con que la curva se aleja de su recta tangente en un puntoP dado de ella. En terminos generales a esta rapidez se llama curvatura de lacurva en el punto P .
Figura 11: La curvatura es pequeñaFigura 12: La curvaturaes grande.
Al estudiar la curvatura de una curva en un punto P de ella nos interesatener información sobre la variación del vector tangente f(t) en el punto P . Porsu puesto solo la variación en la dirección de f ′(t) y no su magnitud.
Sea f : [a, b] → R3 un camino regular en [a, b]
V. Contreras T. Página 10

4 CURVATURA Y TORSIÓN
Eligiendo dos puntos: f(t0) y f(t) de la curva C con sus respectivos vectorestangentes unitarios T (t) y T (t), nos interesa estudiar la razón∥∥∥∥T (t)− T (t0)
s(t)− s(t0)
∥∥∥∥ (3)
que es el cambio promedio de dirección por unidad de distancia.
Figura 13:
La razón (3) es la medida de cuanto se curva la curva C y la razón instantanease obtiene tomando el limite cuando t se aproxima a t0. Así
lımt→t0
∥∥∥T (t)−T (t0)t−t0
∥∥∥| s(t)−s(t0)
t−t0|
=‖T ′(t0)‖| s′(t0) |
=‖T ′(t0)‖‖f ′(t0)‖
El número K(t0) =‖T ′(t0)‖‖f ′(t0)‖
sellama curvatura de C en el punto f(t0).
Definición 4.1. El vector−→K (t) =
T ′(t)
‖f ′(t)‖se denomina vector curvatura en
el punto f(t). El escalar K = ‖−→K (t)‖ se llama curvatura
Teorema 4.1. Si f : I ⊂ R → R3 es una curva regular con segunda derivadacontinua entonces la curvatura K de la curva C está dada por:
K =‖f ′ × f ′′‖‖f ′‖3
(4)
Teorema 4.2. Si f : I ⊂ R → R2 es una curva regular con segunda derivadadada por f(t) = (x(t), y(t)) entonces la curvatura K de la curva C está dada por:
K =| x′ y′′ − x′′ y′ |(x′2 + y′2)3/2
(5)
V. Contreras T. Página 11

4 CURVATURA Y TORSIÓN
Teorema 4.3. Si una curva C está definida por la función polar g : [α, β] → Rque tiene segunda derivada entonces la curvatura K de la curva C está dada por:
K =| g′ + 2g′2 − g g′′ |
(g2 + g′2)3/2(6)
Teorema 4.4. Si una curva C es la gráfica de la función real de variable realy = h(x) que tiene segunda derivada entonces la curvatura K de la curva C estádada por:
K =| h′′ |
(1 + h′2)3/2(7)
NOTA 4.1.
Observemos que la curvatura de un camino tal como ha sido definida, essiempre un número no negativo. Sin embargo en el caso de curvas en R2, esposible asociar un signo a la curvatura .
Figura 14:
Si f : J ⊂ R → R2 es la reparametrización de f por longitud de arco, elvector T (s) = f ′(s) es un vector unitario para toda s ∈ J .
Considerando el vector unitario N(s) que se obtiene al girar el vector T (s)un ángulo de π
2en sentido antihorario. Tenemos asi que los vectores T ′(s) y N(s)
son ortogonales a T (s), y por lo tanto colineales, de modo que para cada s ∈ J ,existe un número K(s) bien definido
T ′(s) = f ′′(s) = K(s) N(s)
a este número K(s) lo llamaremos curvatura de f en s.
4.2. Círculo de Curvatura
Definición 4.2. Sea f : I ⊂ R → R2 la función que describe la curva regular Cdos veces diferenciable para los puntos f(t) en los cuales K(t) 6= 0. Se definen:
V. Contreras T. Página 12

4 CURVATURA Y TORSIÓN
1. El radio de curvatura ρ(t) de la curva C en el punto f(t) por
ρ(t) =1
K(t)
2. El centro de curvatura de la curva C en el punto f(t) por
C(t) = f(t) + ρ(t) N(t)
3. El circulo de curvatura de C, corresponde a f(t) es la circunferencia deradio ρ y centro el centro de curvatuta.
Figura 15:
4.3. Torsión
Ahora centraremos nuestra atención en la rapidez con que una curva se alejade su plano osculador en la vecindad de un punto dado de ella. Esta rapidez estárelacionada (directamente) con el concepto de torsión
Figura 16: La curva C2 tiene más torsión que la curva C1 en P .
La idea intuitiva del concepto de torsión es la medida de cuanto se tuercela curva.
V. Contreras T. Página 13

4 CURVATURA Y TORSIÓN
Definición 4.3. Sea f : I ⊂ R → R3 la parametrizacion de la curva regularC. La torsión es un número real que indica el levantamiento de la curva C enun punto f(t0) respecto de su plano osculador en dicho punto. Este valor estádeterminado por la razón de cambio instantaneo del vector binormal respecto a lalongitud de arco
lımt→t0
∥∥∥B(t)−B(t0)t−t0
∥∥∥| s(t)−s(t0)
t−t0|
=‖B′(t0)‖| s′(t0) |
=‖B′(t0)‖‖f ′(t0)‖
Como el vectorB′
s′es paralelo al vector normal principal N , esto es,
B′
s′es igual a N multiplicado por un número real; al opuesto de este número re-al se denomina torsión de la curva C en f(t) y denotaremos por τ es decir,B′(t)
s′(t)= −τ(t) N(t). Luego
B′(t) = −τ(t) s′(t) N(t) (8)
Observación 4.1.
1. Notemos que | τ(t0) |= ‖B′(t0)‖‖f ′(t0)‖
2. Si la curva C parametrizada por f(t) es plana, entonces su torsión es nula(τ = 0) por lo tanto B = constante.
Teorema 4.5. Si C es una curva en R3 definida por f(t) entonces
τ(t) =f ′(t)× f ′′(t).f ′′′(t)
‖f ′(t)× f ′′(t)‖2(9)
Para todo t ∈ [a, b] se tiene:
T ′(t) = K(t) s′(t) N(t)
N ′(t) = −K(t) s′(t) T (t) + τ(t) s′(t) B(t)
B′(t) = −τ(t) s′(t) N(t)
Este sistema es llamado Ecuaciones de Frenet de la función f en el punto f(t).
Teorema 4.6. Si C es una curva en R3 parametrizada por g en terminos de lalongitud de arco s, entonces se tiene:
τ(s) =g′(s)× g′′(s).g′′′(s)
‖g′′(s)‖2(10)
V. Contreras T. Página 14

4 CURVATURA Y TORSIÓN
Para todo s ∈ [c, d] se tiene:
T ′(s) = K(s) N(s)
N ′(s) = −K(s) T (s) + τ(s) B(s)
B′(s) = −τ(s) N(s)
Este sistema es llamado Ecuaciones de Frenet de la función g en el punto g(s).
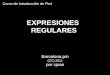
Ejemplo 4.1. Sea α : R+ → R3, definida por α(t) = (t2, 23t3, t), la trayectoria
regular que describe una partícula que se mueve a lo largo de una curva C. Parael instante t = 1. Determine:
1. Su velocidad ,rapidez y aceleración.
2. Los vectores tangente, normal y binormal de la curva en ese instante
3. La curvatura y torsión de la curva en ese punto.
4. Las componentes tangencial y normal de la aceleración en el punto.
Solución
Figura 17: Vectores T, N, B de la curva C : α(t) = (t2, 23t3, t) en el punto t = 1
1. A partir de la definición tenemos que el vector velocidad, rapidez, vectoraceleración y aceleración en función del tiempo estan dadas por:
V (t) = α′(t) = (2t, 2t2, 1) ⇒ V (1) = α′(1) = (2, 2, 1)
v(t) = ‖V (t)‖ =√
α′(t).α′(t) =√
4t2 + 4t4 + 1 ⇒ v(1) = 3
α′′(t) = (2, 4t, 0) ⇒ α′′(1) = (2, 4, 0)
a(t) = ‖α′′(t)‖ =√
α′′(t).α′′(t) =√
4 + 16t2 ⇒ a(1) =√
20
V. Contreras T. Página 15

4 CURVATURA Y TORSIÓN
2. Los vectores tangente, normal y binormal de la curva en t = 1 esta dadapor:
T (t) = α′(t)‖α′(t)‖ ⇒ T (1) = (2,2,1)
3
B(t) = α′(t)×α′′(t)‖α′(t)×α′′(t)‖ ⇒ B(1) = (−4,2,4)
6
N(t) = (α×α′′(t))×α′(t)‖(α′(t)×α′′(t))×α′(t)‖ ⇒ N(1) = (−1,2,−2)
3
3. La curvatura y torsión de la curva en t = 1 esta dada por:
K(t) = ‖α′×α′′‖‖α′‖3 ⇒ K(1) = 2
9
τ(t) = α′(t)×α′′(t).α′′′(t)‖α′(t)×α′′(t)‖2 ⇒ τ(1) = 2
9
4. Las componentes tangencial y normal de la aceleración en el punto t = 1son:
aT (t) = s′′(t) = α′(t).α′′(t)‖α′(t)‖ ⇒ aT (1) = 4
aN(t) = s′(t)‖T ′(t)‖ = s′(t)‖K(t) s′(t) N(t)‖ = K(t) (s′(t))2 = K(t) (α′(t))2 ⇒aN(1) = 2
EJERCICIOS
1. Dada la curva x2 − 2yz = 0 y y + z −√
2x− 1 = 0
a) Halle la ecuación del plano osculador en el punto (− 12√
2, 1
4, 1
4)
b) Halle la curvatura en el dado anteriormente.
2. Dada la curva C definida por:
C :
{x2 + y2 + 2y = 3z + x = 2
a) Describa la curva C mediante una función vectorial −→r : R → R3 ygrafique dicha curva.
b) Halle el centro de la circunferencia de curvatura en el punto P (0, 1, 2).
3. Una curva llamada bruja de María Agnesi, costa de todos lod puntos P ,determinados como se ilustra en la figura de abajo.
a) Halle la ecuación paramétrica de esta curva, usando el ángulo θ comoparámetro y grafique.
b) Halle el punto más alto de la curva.
c) Halle los vectores T y N en el punto más alto de la curva.
V. Contreras T. Página 16

4 CURVATURA Y TORSIÓN
4. Halle la representación paramétrica de la curva f = f(λ) sabiendo que sutorsión es τ = − 1
a(a es una constante positiva) y que un vector en la
dirección y sentido del vector binormal es (cos2λ , senλ cosλ , senλ).
5. Sea C una curva descrita por la función f(t) = (√
1− t2 , 1 , t−ln(1 + t√1− t2
))
y dados los planos P1 : x + z = 1 y P2 : x− z = 1 Halle la curvatura de Cen el punto de se intersección C , , P1 y P2.
6. Dadas las superficies S1 : x2 + y2 + z2 = 6 y S2 : x2 + y2 = z
a) Halle la representación paramétrica de la curva C definida como laintersección de S1 y S2, dirigida de manera que desde el origen decoordenadas se observa en el sentido antihorario.
b) Halle el vector tangente a la curva C en el punto (−1 , −1 , 2)
c) Halle la torsión en cualquier punto de la curva C.
d) Represente la curva C mediante el paámetro longitud de arco.
7. pruebe que la normal principal a una curva Γ (en el punto con curvaturaK 6= 0 ) tenga la misma direeción que la tangente al lugar geométrico delos centros de curvatura, si la curva es una curva plana.
8. Si la representación paramétrica de la curva C esta dada por la funciónvectorial f(t), su torsión es τ = − 1
a, a > 0, y que un vector en la dirección
y sentido del vector binormal es (cos2t, sen(2t)2
, sen t). Halle f(t).
9. Una partícula se desplaza en el plano a lo largo de la curva C con la ecuacióny = Ln(x+
√x2 − 1) x ≥ 1 con rapidez constante
√3
2m/s y parte del punto
(1,0) en el instante t = 0, halle la ecuación de la circunferencia osculatrizen el punto en que se encuentra la particula, después de haber transcurrido2 segundos después de su partida.
10. Dado el vector aceleración de una partícula α ′′(t) = (0, 0,−10) m/s2, t ≥ 0.Si α(0) = (0, 0, 0) y α ′(0) = (10, 0, 10):
V. Contreras T. Página 17

4 CURVATURA Y TORSIÓN
a) ¿Cuál es el radio de curvatura de la trayectoria α = α(t) en el instantesen que la partícula impacta al plano P : x + y + 2z + 40 = 0?
b) Halle la componente tangencial de la aceleración en el instante t.
11. Halle las intersecciones del plano XY con las rectas tangentes a la hélicedescrita por α(t) = ( cos t , sen t , t) (t > 0). ¿Cuál es la ecuación delplano osculador?
12. Halle la representación paramétrica de la curva C definida como la inter-sección de S1 y S2, dirigida de manera que desde el origen de coordenadasse observa en el sentido antihorario.
a) Halle el vector tangente a la curva C en el punto (−1 , −1 , 2)
b) Halle la torsión en cualquier punto de la curva C.
c) Represente la curva C mediante el paámetro longitud de arco.
13. Sea Γ la curva de ecuaciones paramétricas x = 3t, y = 3t2 , z = t3 parat ∈ R. sea Γ∗ la curva de intersección de las rectas tangentes a Γ con elplano osculador de la curva γ en el punto (3, 3, 1). Calcule la curvatura ytorsión de la curva Γ∗.
14. Halle la curvatura y torsión de una curva γ situada en el plano z = 0 para lacual s es el arco y su vector normal principal es N(s) = (− cos(s2), sen(s2), 0)
V. Contreras T. Página 18