Embed Size (px)
Citation preview

Nonlinear FEM
5Critical Points
NFEM Ch 5 – Slide 1

Nonlinear FEM
Assumptions for this Chapter
=∂u
K = ∂r(u, λ)
r(u, λ)
∂u= ∂ �(u, λ)
∂�(u, λ)
∂u ∂u
System is conservative: total residual is the gradient of atotal potential energy function
Consequence: the tangent stiffness matrix (Hessian of Π)
is real symmetric
2
NFEM Ch 5 – Slide 2

Spectral Properties of Tangent Stiffness Matrix
Nonlinear FEM
K zi = κi zi , i = 1, 2, . . . N
Since K is real symmetric, it enjoys two important spectral properties:
. All eigenvalues of K are real
. K has a complete set of real eigenvectors, which can be orthonormalized so that
in which δ denotes the Kronecker delta
zTi z j = δij
ij
The algebraic eigenproblem for K has the form
NFEM Ch 5 – Slide 3

Regular Versus Critical
Nonlinear FEM
Regular point: K is nonsingularCritical point: K is singular (also called singular or nonregular points)
Useful criterion for small systems with small # of DOF:
The determinant of K vanishes at a critical point
NFEM Ch 5 – Slide 4
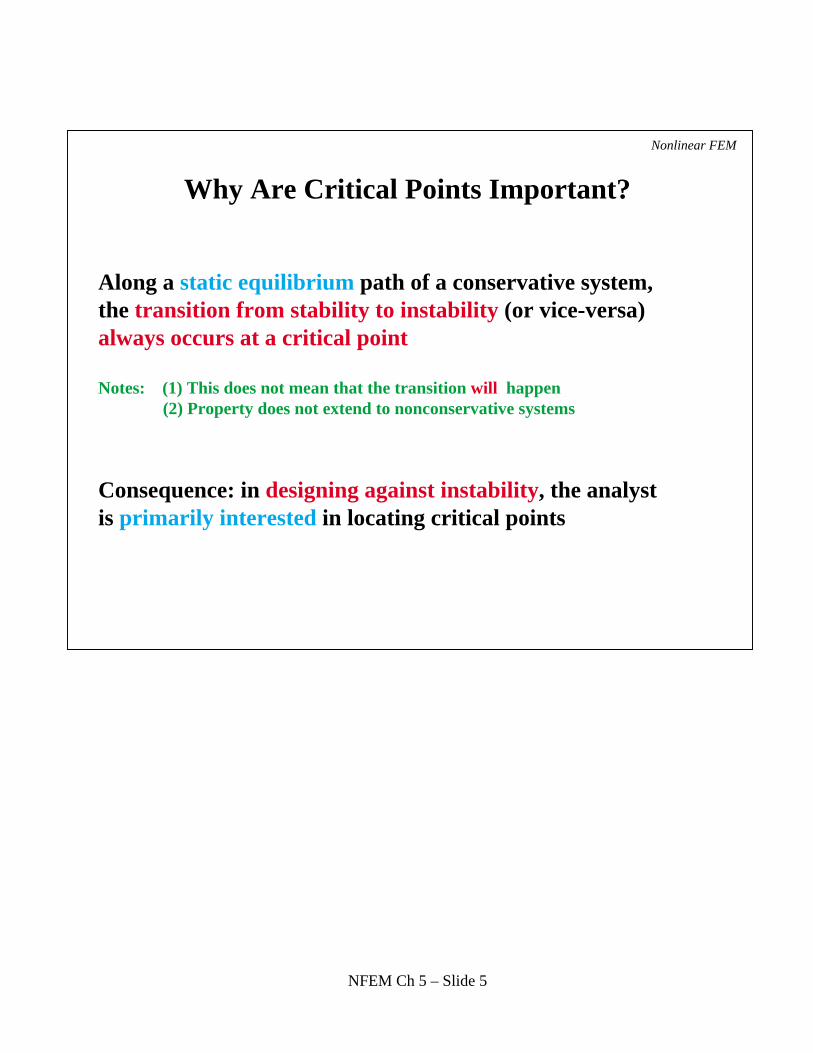
Why Are Critical Points Important?
Nonlinear FEM
Along a static equilibrium path of a conservative system,the transition from stability to instability (or vice-versa) always occurs at a critical point
Notes: (1) This does not mean that the transition will happen (2) Property does not extend to nonconservative systems
Consequence: in designing against instability, the analyst is primarily interested in locating critical points
NFEM Ch 5 – Slide 5
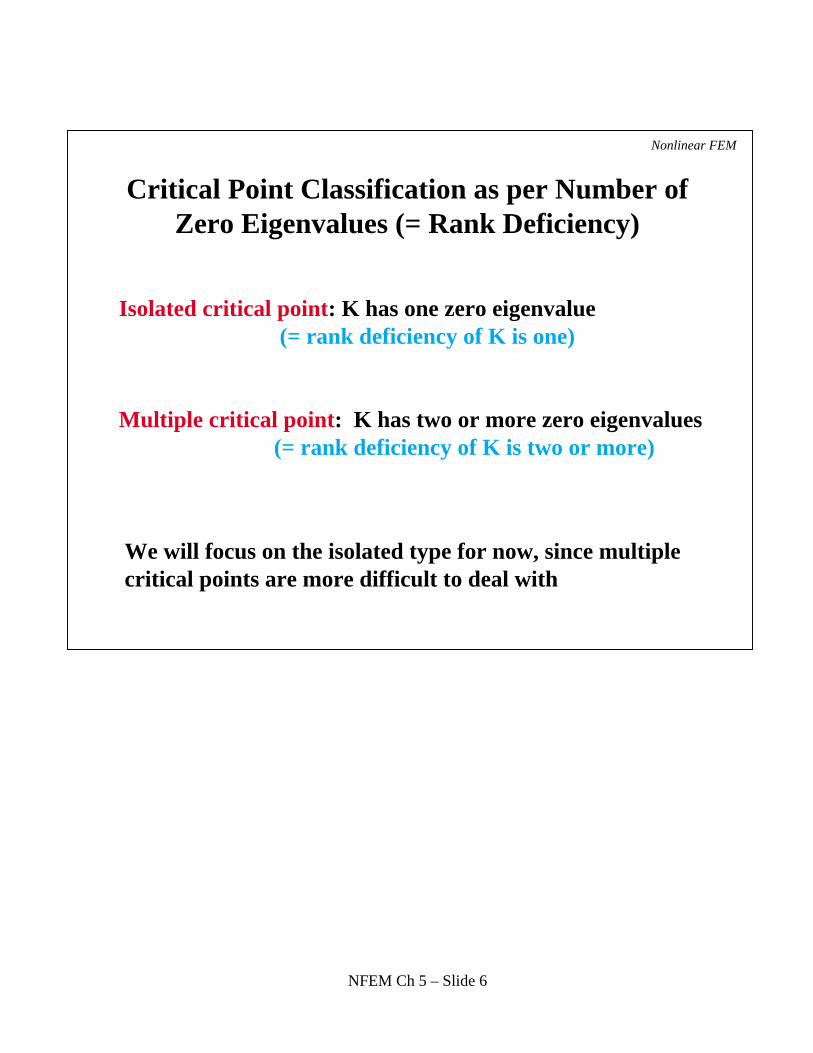
Critical Point Classification as per Number of Zero Eigenvalues (= Rank Deficiency)
Nonlinear FEM
Isolated critical point: K has one zero eigenvalue (= rank deficiency of K is one)
Multiple critical point: K has two or more zero eigenvalues (= rank deficiency of K is two or more)
We will focus on the isolated type for now, since multiplecritical points are more difficult to deal with
NFEM Ch 5 – Slide 6

Classification of Isolated Critical Points
Nonlinear FEM
Limit point: path continues with no branching, buttangent is normal to λ (control parameter) axis
Bifurcation point: two or more paths cross and there isno unique tangent
A limit point may be a maximum, minimum or inflexionpoint. If a maximum or minimum, its occurrence is alsocalled snap-through or snap-buckling by structural engineers
NFEM Ch 5 – Slide 7
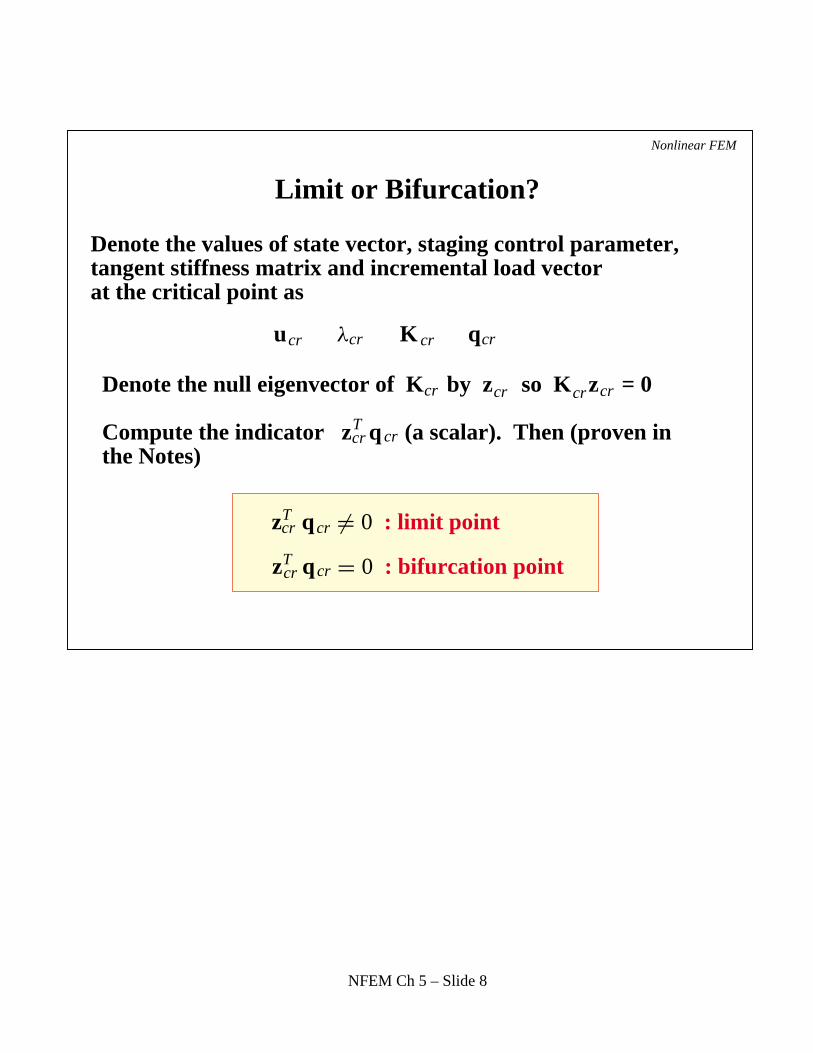
Limit or Bifurcation?
Nonlinear FEM
u λ K q
Denote the values of state vector, staging control parameter, tangent stiffness matrix and incremental load vector at the critical point as
Denote the null eigenvector of K by z so K z = 0
Compute the indicator z q (a scalar). Then (proven inthe Notes)
cr cr
cr
cr cr
cr
cr cr
cr cr
cr cr cr cr
zT
T
q �= 0 : limit point
zT q = 0 : bifurcation point
NFEM Ch 5 – Slide 8

Response Example (2 DOF,pictured in 2D control-state space)
Nonlinear FEM
Bifurcation beforelimit point
Limit point beforebifurcation
u
λ
B
L1
L2
1
λ L1
L2
B2
1B
u1
NFEM Ch 5 – Slide 9

Nonlinear FEM
Response Example (2 DOF,pictured in 3D control-state space)
Bifurcation beforelimit point
λ L1
L 2
B2
1B
u1u2
NFEM Ch 5 – Slide 10

A Simple Example (from Notes) Nonlinear FEM
r = u − 2 u + u − λ = 02 3
Find the critical points of the scalar residual equation
To be worked out on whiteboard
NFEM Ch 5 – Slide 11

The Circle Game Example Nonlinear FEM
r µ, λ = λ − µ λ2 + µ2 − 1 = 0
(Artificial, not associated with a real structure)
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
State parameter µ
Con
trol
par
amet
er λ
R
L1
B1
B2
T1
S2
S1
L2
T2
Total residual:
NFEM Ch 5 – Slide 12
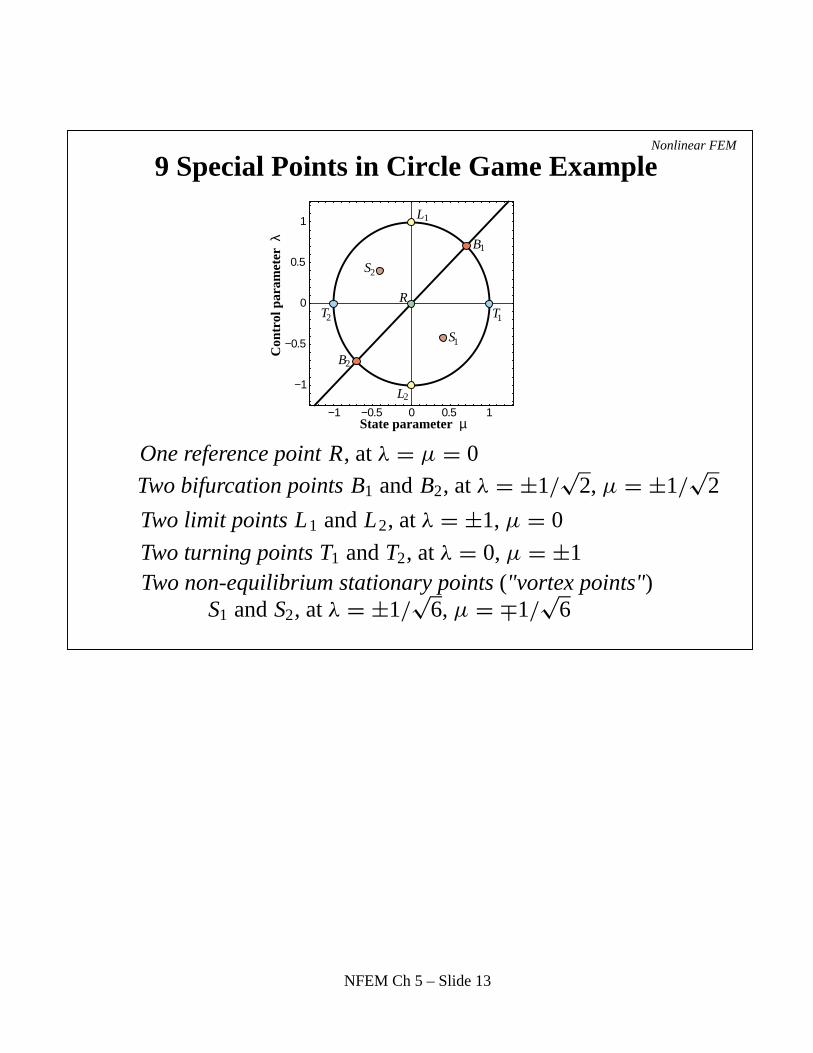
9 Special Points in Circle Game ExampleNonlinear FEM
One reference point R, at λ = µ = 0
Two bifurcation points B1 and B2, at λ = ±1/√
2, µ = ±1/√
2
Two limit points L1 and L2, at λ = ±1, µ = 0
Two turning points T1 and T2, at λ = 0, µ = ±1Two non-equilibrium stationary points ("vortex points")
S1 and S2, at λ = ±1/√
6, µ = ∓1/√
6
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
State parameter µ
Con
trol
par
amet
er λ
R
L1
B1
B2
T1
S2
S1
L2
T2
NFEM Ch 5 – Slide 13
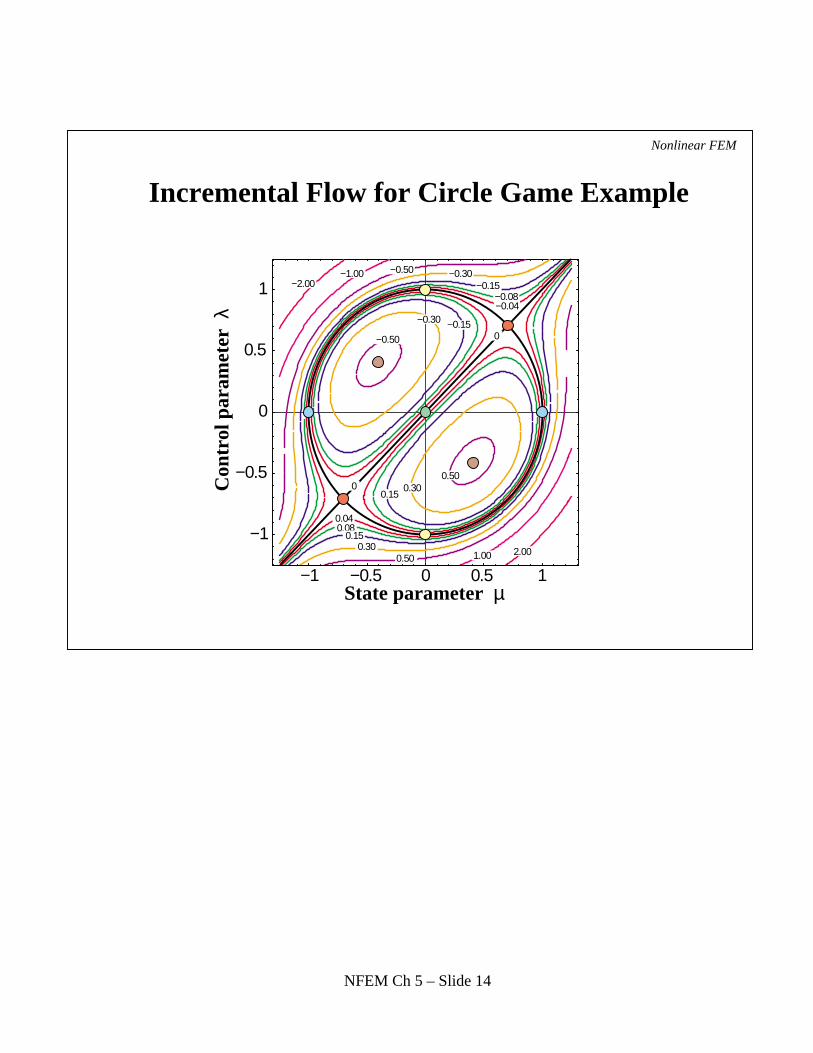
Incremental Flow for Circle Game Example
Nonlinear FEM
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
State parameter µ
Con
trol
par
amet
er λ
0.04
0
0
0.080.15
0.15
0.30
0.30
0.50
0.50
1.00 2.00
−0.04−0.08
−0.15
−0.15
−0.30
−0.30
−0.50
−0.50
−1.00−2.00
NFEM Ch 5 – Slide 14

Tangent Stiffness, Incremental Load, andIncremental Velocity for Circle Game Example
Nonlinear FEM
K = ∂r
∂µ= 1 − λ2 + 2λµ − 3µ2
q = − ∂r
∂λ= 1 − 3λ2 + 2λµ − µ2
v = q/K
For 1 DOF these matrix and vector quantities reduceto scalars:
NFEM Ch 5 – Slide 15
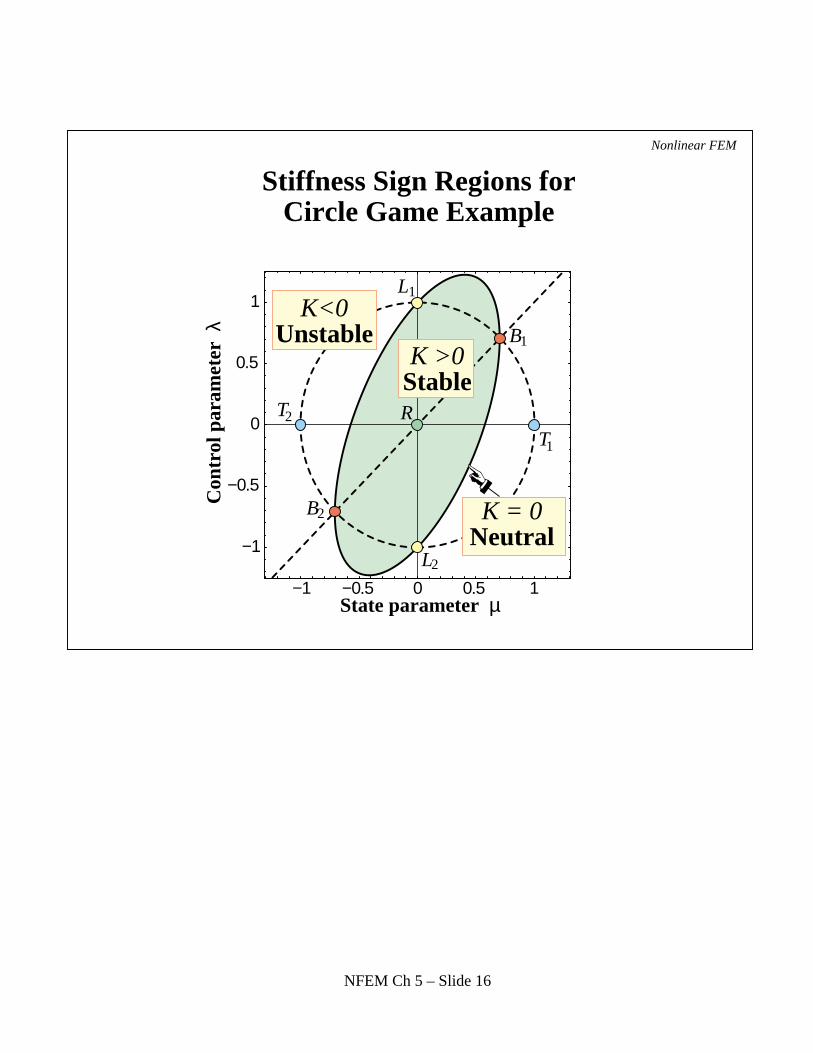
Stiffness Sign Regions for Circle Game Example
Nonlinear FEM
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
State parameter µ
Con
trol
par
amet
er λ
R
L1
B1
B2
T1
L2
T2
K >0Stable
K<0Unstable
K = 0Neutral
NFEM Ch 5 – Slide 16

Incremental Load Sign Regions for Circle Game Example
Nonlinear FEM
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
State parameter µ
Con
trol
par
amet
er λ
R
L1
B1
B2
T1
L2
T2
q = 0
q > 0
q< 0
NFEM Ch 5 – Slide 17

Incremental Velocity Sign Regions for Circle Game Example
Nonlinear FEM
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
State parameter µ
Con
trol
par
amet
er λ
R
L1
S1
S2
B1
B2
T1
L2
T2
K = 0
q=0 & v=0
v=q/K=0/0
NFEM Ch 5 – Slide 18
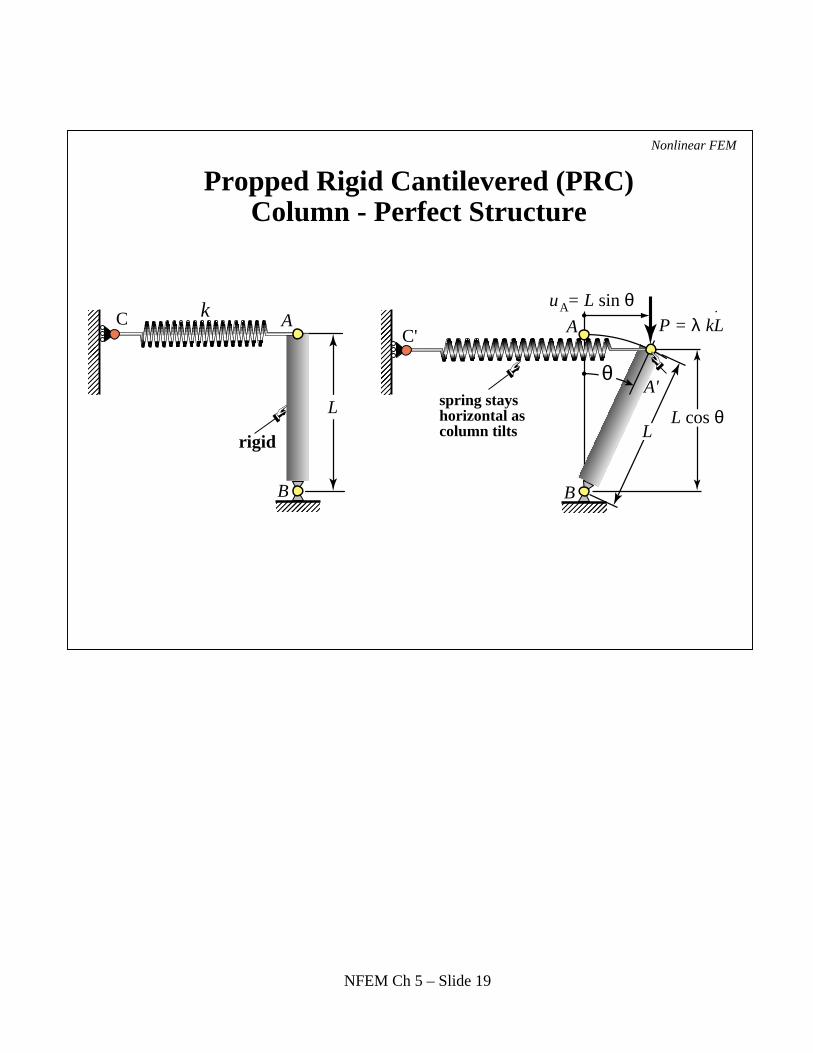
Propped Rigid Cantilevered (PRC)Column - Perfect Structure
Nonlinear FEM
����
A
B
��� k
A'
A
B
P = λ kL
u = L sin θA
������
rigid
L
����
θ
CC'
spring stayshorizontal ascolumn tilts L
L cos θ
NFEM Ch 5 – Slide 19

Perfect PRC Column: Response
Nonlinear FEM
Control versus state parameter response for perfect column
Tangent stiffness versus state parameter response for perfect column
B
State parameter µState parameter µ
Con
trol
par
amet
er λ
Stif
fnes
s co
effi
cien
t K
−1 −0.5 0 0.5 1
−0.75−0.5
−0.250
0.250.5
0.751
B
R T1T2−1 −0.5 0 0.5 1
0.2
0.4
0.6
0.8
1
1.2
1.4
Unstable Unstable
Stable
Unstable
λcr
NFEM Ch 5 – Slide 20

Propped Rigid Cantilevered (PRC)Column - Imperfect Structure
Nonlinear FEM
��B
��� k
A'AA
B
���
��
θ
CC'
εL
InitialImperfection
θ0θ0
A0A0
L
rigid
spring stayshorizontal ascolumn tilts
P = λ kLu = L sin θA
L cos θL
NFEM Ch 5 – Slide 21
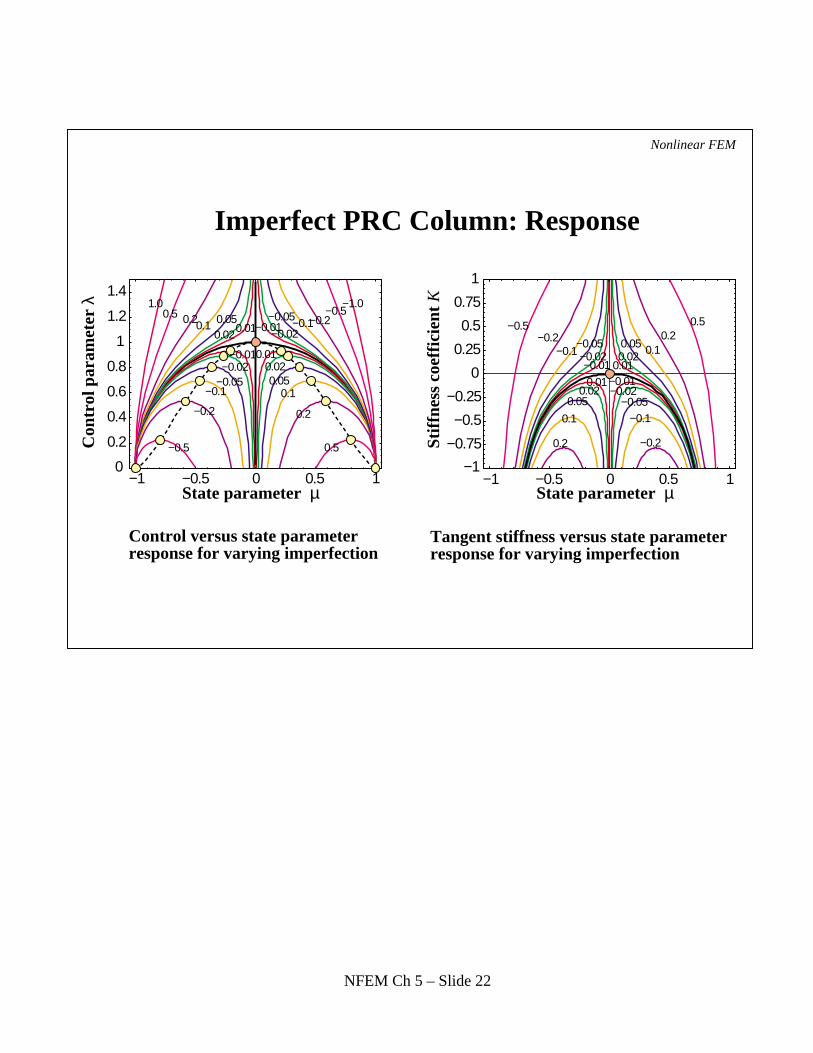
Control versus state parameter response for varying imperfection
Tangent stiffness versus state parameter response for varying imperfection
−1 −0.5 0 0.5 1
0.2
0.4
0.6
0.8
1
1.2
1.4
−1 −0.5 0 0.5 1
−0.75−0.5
−0.250
0.250.5
0.751
State parameter µState parameter µ
Con
trol
par
amet
er λ
Stif
fnes
s co
effi
cien
t K
0.01
0.01
−0.01
−0.01
0.02
0.02
0.05
0.05
0.1
0.1
0.2
0.2
0.5
0.51.0
−0.02
−0.02
−0.05
−0.05
−0.1
−0.1
−0.2
−0.2
−0.5
−0.5−1.0
0.010.01−0.01
−0.010.02
0.02
0.05
0.05
0.1
0.1
0.2
0.20.5
−0.02
−0.02
−0.05
−0.05−0.1
−0.1
−0.2
−0.2−0.5
0 −1
Imperfect PRC Column: Response
Nonlinear FEM
NFEM Ch 5 – Slide 22
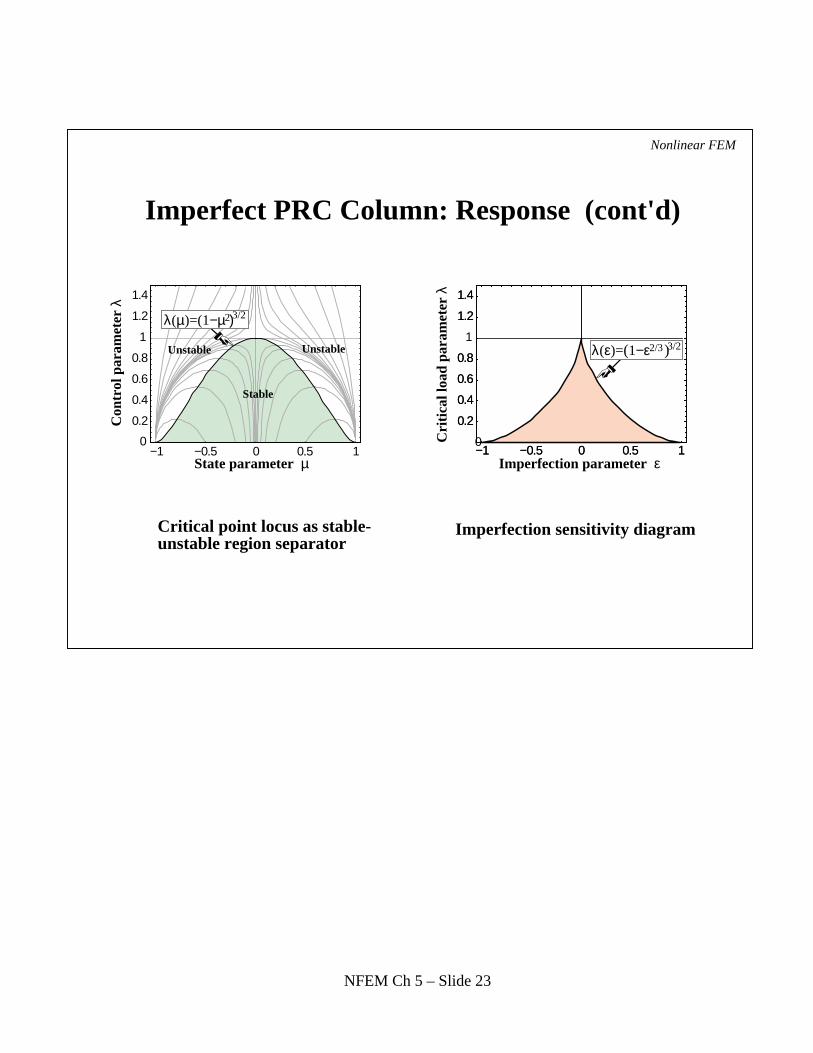
Imperfect PRC Column: Response (cont'd)
Critical point locus as stable-unstable region separator
Imperfection sensitivity diagram
−1 −0.5 00 0
0.5 1
0.2
0.4
0.6
0.8
1
1.2
1.4
State parameter µ Imperfection parameter ε
Con
trol
par
amet
er λ
Cri
tica
l loa
d pa
ram
eter
λ
Unstable Unstable
Stable
−1 −0.5 0 0.5 1
0.2
0.4
0.6
0.8
1.2
1.4
−1 −0.5 0 0.5 1
0.2
0.4
0.6
0.8
1
1.2
1.4
λ(µ)=(1−µ )2 3/2
λ(ε)=(1−ε )3/2 2/3
Nonlinear FEM
NFEM Ch 5 – Slide 23





























