Embed Size (px)
Citation preview
1 Etudes préliminaires
1.1 Essais statiques et dynamiques, in situ et en laboratoire 1.1.1 Introduction
1.1.2 Essais in situ 1.1.2.1 Essais de pénétration 1.1.2.2 Essais de cisaillement 1.1.2.3 Essais d’expansion 1.1.2.4 Essais sismiques
1.1.3 Essais en laboratoire 1.1.3.1 Classification des essais 1.1.3.2 Essais quasi-statiques de précision
1.1.4 Conclusion
1.2 Propagation d’ondes dans un milieu continu élastique
1.2.1 Elasticité linéaire 1.2.1.1 Elasticité linéaire isotrope 1.2.1.2 Elasticité linéaire isotrope transverse
1.2.2 Propagation d’ondes dans un milieu élastique linéaire 1.2.2.1 Milieu élastique linéaire isotrope 1.2.2.2 Milieu élastique linéaire isotrope transverse
1.2.3 Conclusion
1.3 Propagation d’ondes dans un milieu poroélastique saturé
1.3.1 Poroélasticité 1.3.1.1 Poroélasticité isotrope 1.3.1.2 Poroélasticité isotrope transverse
1.3.2 Propagation d’ondes dans un milieu poroélastique isotrope 1.3.2.1 Ondes de compression 1.3.2.2 Ondes de cisaillement 1.3.3 Conclusion
1.4 Conclusion
1

2
Partie 1 : Etudes préliminaires
Introduction
Caractériser la réponse des sols à des sollicitations diverses comme celles présentes à l’état naturel nécessite l’emploi d’un certain nombre de techniques d’essais en place (in situ) mais également en laboratoire.
En premier lieu, les principaux essais réalisés in situ et en laboratoire sont ainsi
succinctement présentés. Les essais en laboratoire se sont considérablement diversifiés au cours des dernières années. Une classification est proposée en insistant sur les appareils de précision dont les plus récents comprennent des dispositifs de sollicitations quasi-statiques mais également dynamiques.
Dans le cas de techniques d’essais dynamiques (tels que les essais de propagation
d’ondes réalisés à la fois in situ et en laboratoire), une hypothèse au préalable sur le comportement du sol est nécessaire. Sous cette hypothèse, les vitesses des ondes émises dans le sol peuvent être alors reliées aux paramètres de comportement de ce sol. Dans un second temps, il est donc proposé de présenter ces relations en considérant le sol comme un milieu continu élastique ou comme un milieu poreux (constitué de deux phases, solide et liquide) élastique, lorsque celui-ci est saturé.
3

4
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
1.1 Essais statiques et dynamiques, in situ et en
laboratoire
1.1.1 Introduction
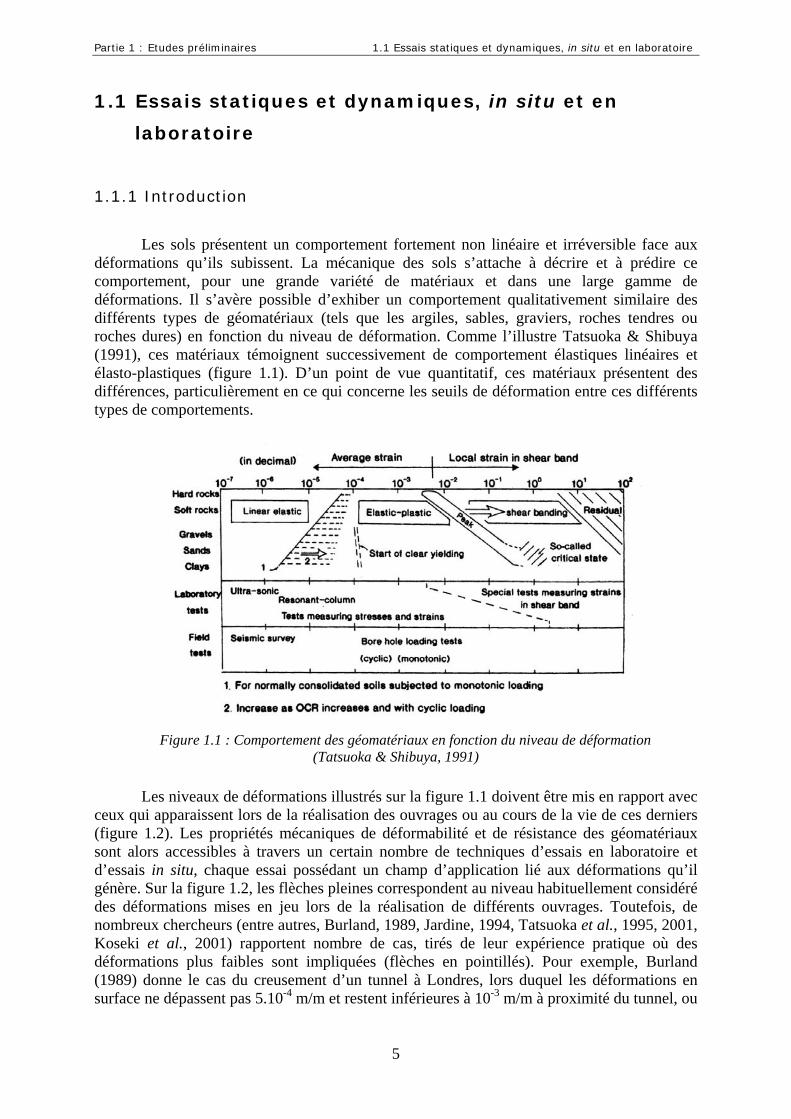
Les sols présentent un comportement fortement non linéaire et irréversible face aux déformations qu’ils subissent. La mécanique des sols s’attache à décrire et à prédire ce comportement, pour une grande variété de matériaux et dans une large gamme de déformations. Il s’avère possible d’exhiber un comportement qualitativement similaire des différents types de géomatériaux (tels que les argiles, sables, graviers, roches tendres ou roches dures) en fonction du niveau de déformation. Comme l’illustre Tatsuoka & Shibuya (1991), ces matériaux témoignent successivement de comportement élastiques linéaires et élasto-plastiques (figure 1.1). D’un point de vue quantitatif, ces matériaux présentent des différences, particulièrement en ce qui concerne les seuils de déformation entre ces différents types de comportements.
Figure 1.1 : Comportement des géomatériaux en fonction du niveau de déformation (Tatsuoka & Shibuya, 1991)
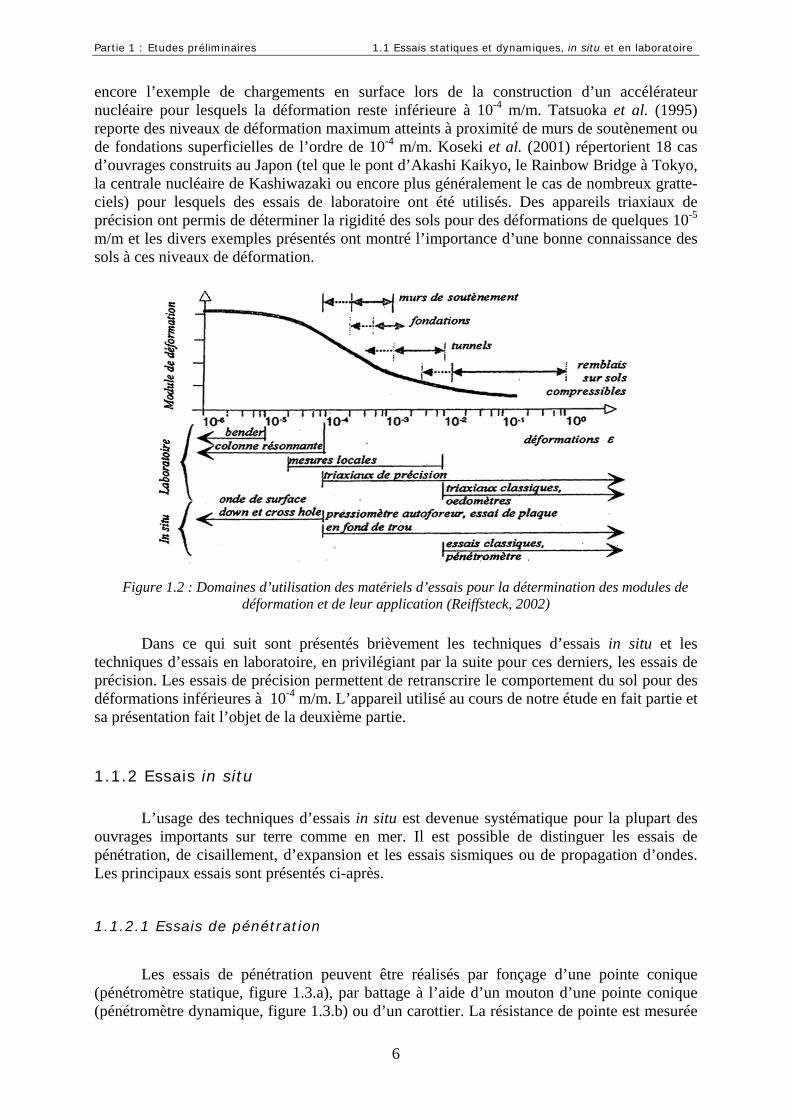
Les niveaux de déformations illustrés sur la figure 1.1 doivent être mis en rapport avec ceux qui apparaissent lors de la réalisation des ouvrages ou au cours de la vie de ces derniers (figure 1.2). Les propriétés mécaniques de déformabilité et de résistance des géomatériaux sont alors accessibles à travers un certain nombre de techniques d’essais en laboratoire et d’essais in situ, chaque essai possédant un champ d’application lié aux déformations qu’il génère. Sur la figure 1.2, les flèches pleines correspondent au niveau habituellement considéré des déformations mises en jeu lors de la réalisation de différents ouvrages. Toutefois, de nombreux chercheurs (entre autres, Burland, 1989, Jardine, 1994, Tatsuoka et al., 1995, 2001, Koseki et al., 2001) rapportent nombre de cas, tirés de leur expérience pratique où des déformations plus faibles sont impliquées (flèches en pointillés). Pour exemple, Burland (1989) donne le cas du creusement d’un tunnel à Londres, lors duquel les déformations en surface ne dépassent pas 5.10-4 m/m et restent inférieures à 10-3 m/m à proximité du tunnel, ou
5
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
encore l’exemple de chargements en surface lors de la construction d’un accélérateur nucléaire pour lesquels la déformation reste inférieure à 10-4 m/m. Tatsuoka et al. (1995) reporte des niveaux de déformation maximum atteints à proximité de murs de soutènement ou de fondations superficielles de l’ordre de 10-4 m/m. Koseki et al. (2001) répertorient 18 cas d’ouvrages construits au Japon (tel que le pont d’Akashi Kaikyo, le Rainbow Bridge à Tokyo, la centrale nucléaire de Kashiwazaki ou encore plus généralement le cas de nombreux gratte-ciels) pour lesquels des essais de laboratoire ont été utilisés. Des appareils triaxiaux de précision ont permis de déterminer la rigidité des sols pour des déformations de quelques 10-5 m/m et les divers exemples présentés ont montré l’importance d’une bonne connaissance des sols à ces niveaux de déformation.
Figure 1.2 : Domaines d’utilisation des matériels d’essais pour la détermination des modules de
déformation et de leur application (Reiffsteck, 2002)
Dans ce qui suit sont présentés brièvement les techniques d’essais in situ et les techniques d’essais en laboratoire, en privilégiant par la suite pour ces derniers, les essais de précision. Les essais de précision permettent de retranscrire le comportement du sol pour des déformations inférieures à 10-4 m/m. L’appareil utilisé au cours de notre étude en fait partie et sa présentation fait l’objet de la deuxième partie.
1.1.2 Essais in situ
L’usage des techniques d’essais in situ est devenue systématique pour la plupart des ouvrages importants sur terre comme en mer. Il est possible de distinguer les essais de pénétration, de cisaillement, d’expansion et les essais sismiques ou de propagation d’ondes. Les principaux essais sont présentés ci-après.
1.1.2.1 Essais de pénétration
Les essais de pénétration peuvent être réalisés par fonçage d’une pointe conique
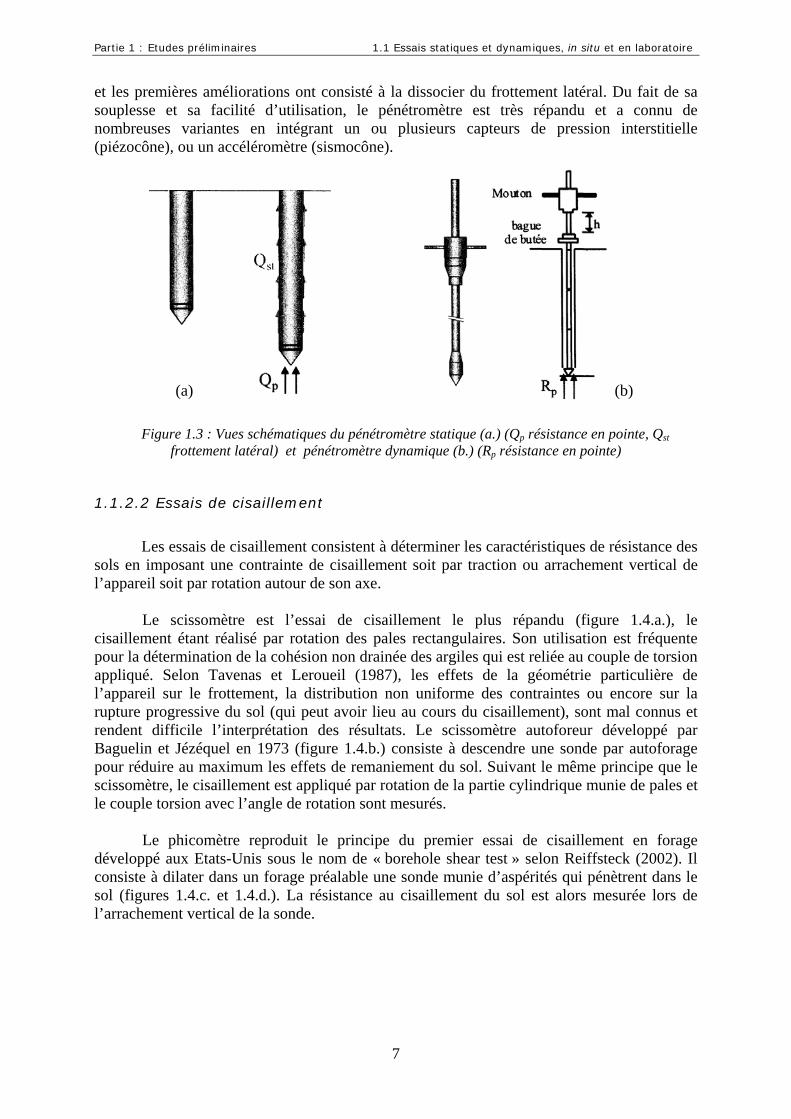
(pénétromètre statique, figure 1.3.a), par battage à l’aide d’un mouton d’une pointe conique (pénétromètre dynamique, figure 1.3.b) ou d’un carottier. La résistance de pointe est mesurée
6
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
et les premières améliorations ont consisté à la dissocier du frottement latéral. Du fait de sa souplesse et sa facilité d’utilisation, le pénétromètre est très répandu et a connu de nombreuses variantes en intégrant un ou plusieurs capteurs de pression interstitielle (piézocône), ou un accéléromètre (sismocône). a. b.
(a) (b)
Figure 1.3 : Vues schématiques du pénétromètre statique (a.) (Qp résistance en pointe, Qst frottement latéral) et pénétromètre dynamique (b.) (Rp résistance en pointe)
1.1.2.2 Essais de cisaillement
Les essais de cisaillement consistent à déterminer les caractéristiques de résistance des sols en imposant une contrainte de cisaillement soit par traction ou arrachement vertical de l’appareil soit par rotation autour de son axe.
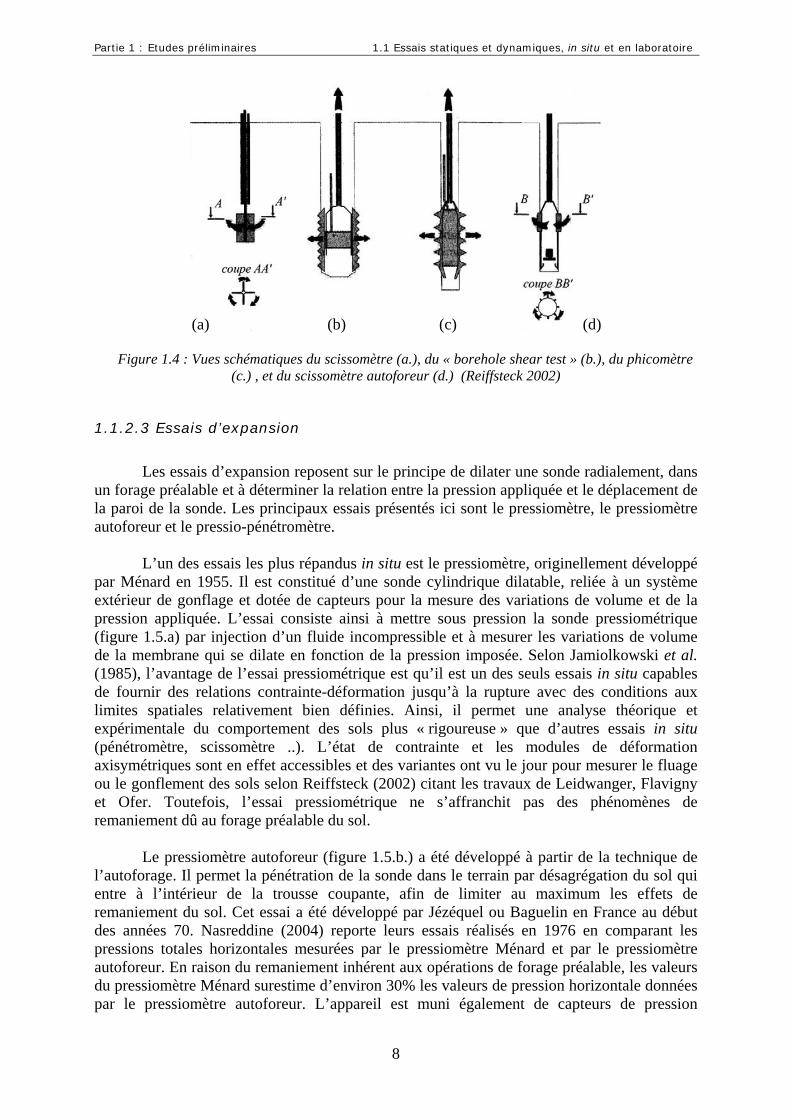
Le scissomètre est l’essai de cisaillement le plus répandu (figure 1.4.a.), le cisaillement étant réalisé par rotation des pales rectangulaires. Son utilisation est fréquente pour la détermination de la cohésion non drainée des argiles qui est reliée au couple de torsion appliqué. Selon Tavenas et Leroueil (1987), les effets de la géométrie particulière de l’appareil sur le frottement, la distribution non uniforme des contraintes ou encore sur la rupture progressive du sol (qui peut avoir lieu au cours du cisaillement), sont mal connus et rendent difficile l’interprétation des résultats. Le scissomètre autoforeur développé par Baguelin et Jézéquel en 1973 (figure 1.4.b.) consiste à descendre une sonde par autoforage pour réduire au maximum les effets de remaniement du sol. Suivant le même principe que le scissomètre, le cisaillement est appliqué par rotation de la partie cylindrique munie de pales et le couple torsion avec l’angle de rotation sont mesurés.
Le phicomètre reproduit le principe du premier essai de cisaillement en forage développé aux Etats-Unis sous le nom de « borehole shear test » selon Reiffsteck (2002). Il consiste à dilater dans un forage préalable une sonde munie d’aspérités qui pénètrent dans le sol (figures 1.4.c. et 1.4.d.). La résistance au cisaillement du sol est alors mesurée lors de l’arrachement vertical de la sonde.
7
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
(a) (b) (c) (d)
Figure 1.4 : Vues schématiques du scissomètre (a.), du « borehole shear test » (b.), du phicomètre (c.) , et du scissomètre autoforeur (d.) (Reiffsteck 2002)
1.1.2.3 Essais d’expansion
Les essais d’expansion reposent sur le principe de dilater une sonde radialement, dans
un forage préalable et à déterminer la relation entre la pression appliquée et le déplacement de la paroi de la sonde. Les principaux essais présentés ici sont le pressiomètre, le pressiomètre autoforeur et le pressio-pénétromètre.
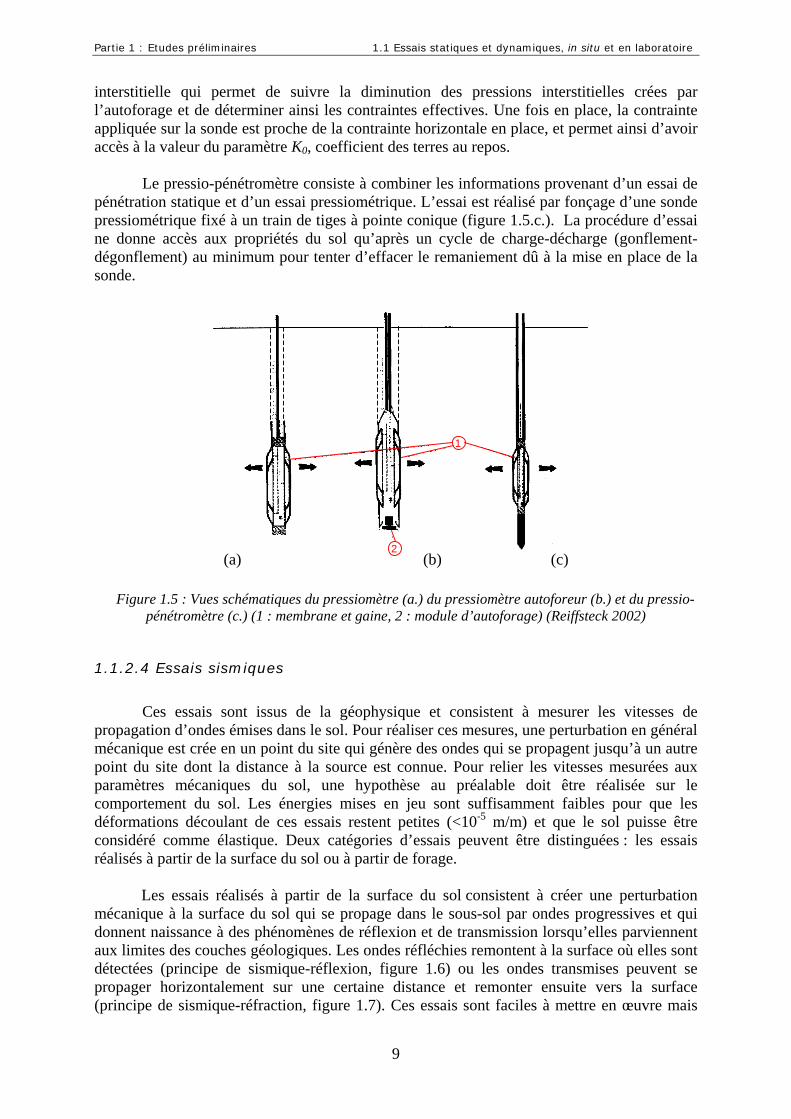
L’un des essais les plus répandus in situ est le pressiomètre, originellement développé par Ménard en 1955. Il est constitué d’une sonde cylindrique dilatable, reliée à un système extérieur de gonflage et dotée de capteurs pour la mesure des variations de volume et de la pression appliquée. L’essai consiste ainsi à mettre sous pression la sonde pressiométrique (figure 1.5.a) par injection d’un fluide incompressible et à mesurer les variations de volume de la membrane qui se dilate en fonction de la pression imposée. Selon Jamiolkowski et al. (1985), l’avantage de l’essai pressiométrique est qu’il est un des seuls essais in situ capables de fournir des relations contrainte-déformation jusqu’à la rupture avec des conditions aux limites spatiales relativement bien définies. Ainsi, il permet une analyse théorique et expérimentale du comportement des sols plus « rigoureuse » que d’autres essais in situ (pénétromètre, scissomètre ..). L’état de contrainte et les modules de déformation axisymétriques sont en effet accessibles et des variantes ont vu le jour pour mesurer le fluage ou le gonflement des sols selon Reiffsteck (2002) citant les travaux de Leidwanger, Flavigny et Ofer. Toutefois, l’essai pressiométrique ne s’affranchit pas des phénomènes de remaniement dû au forage préalable du sol.
Le pressiomètre autoforeur (figure 1.5.b.) a été développé à partir de la technique de l’autoforage. Il permet la pénétration de la sonde dans le terrain par désagrégation du sol qui entre à l’intérieur de la trousse coupante, afin de limiter au maximum les effets de remaniement du sol. Cet essai a été développé par Jézéquel ou Baguelin en France au début des années 70. Nasreddine (2004) reporte leurs essais réalisés en 1976 en comparant les pressions totales horizontales mesurées par le pressiomètre Ménard et par le pressiomètre autoforeur. En raison du remaniement inhérent aux opérations de forage préalable, les valeurs du pressiomètre Ménard surestime d’environ 30% les valeurs de pression horizontale données par le pressiomètre autoforeur. L’appareil est muni également de capteurs de pression
8
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
interstitielle qui permet de suivre la diminution des pressions interstitielles crées par l’autoforage et de déterminer ainsi les contraintes effectives. Une fois en place, la contrainte appliquée sur la sonde est proche de la contrainte horizontale en place, et permet ainsi d’avoir accès à la valeur du paramètre K0, coefficient des terres au repos.
Le pressio-pénétromètre consiste à combiner les informations provenant d’un essai de pénétration statique et d’un essai pressiométrique. L’essai est réalisé par fonçage d’une sonde pressiométrique fixé à un train de tiges à pointe conique (figure 1.5.c.). La procédure d’essai ne donne accès aux propriétés du sol qu’après un cycle de charge-décharge (gonflement-dégonflement) au minimum pour tenter d’effacer le remaniement dû à la mise en place de la sonde.
2(a) (b) (c)
1
Figure 1.5 : Vues schématiques du pressiomètre (a.) du pressiomètre autoforeur (b.) et du pressio-pénétromètre (c.) (1 : membrane et gaine, 2 : module d’autoforage) (Reiffsteck 2002)
1.1.2.4 Essais sismiques
Ces essais sont issus de la géophysique et consistent à mesurer les vitesses de
propagation d’ondes émises dans le sol. Pour réaliser ces mesures, une perturbation en général mécanique est crée en un point du site qui génère des ondes qui se propagent jusqu’à un autre point du site dont la distance à la source est connue. Pour relier les vitesses mesurées aux paramètres mécaniques du sol, une hypothèse au préalable doit être réalisée sur le comportement du sol. Les énergies mises en jeu sont suffisamment faibles pour que les déformations découlant de ces essais restent petites (<10-5 m/m) et que le sol puisse être considéré comme élastique. Deux catégories d’essais peuvent être distinguées : les essais réalisés à partir de la surface du sol ou à partir de forage.
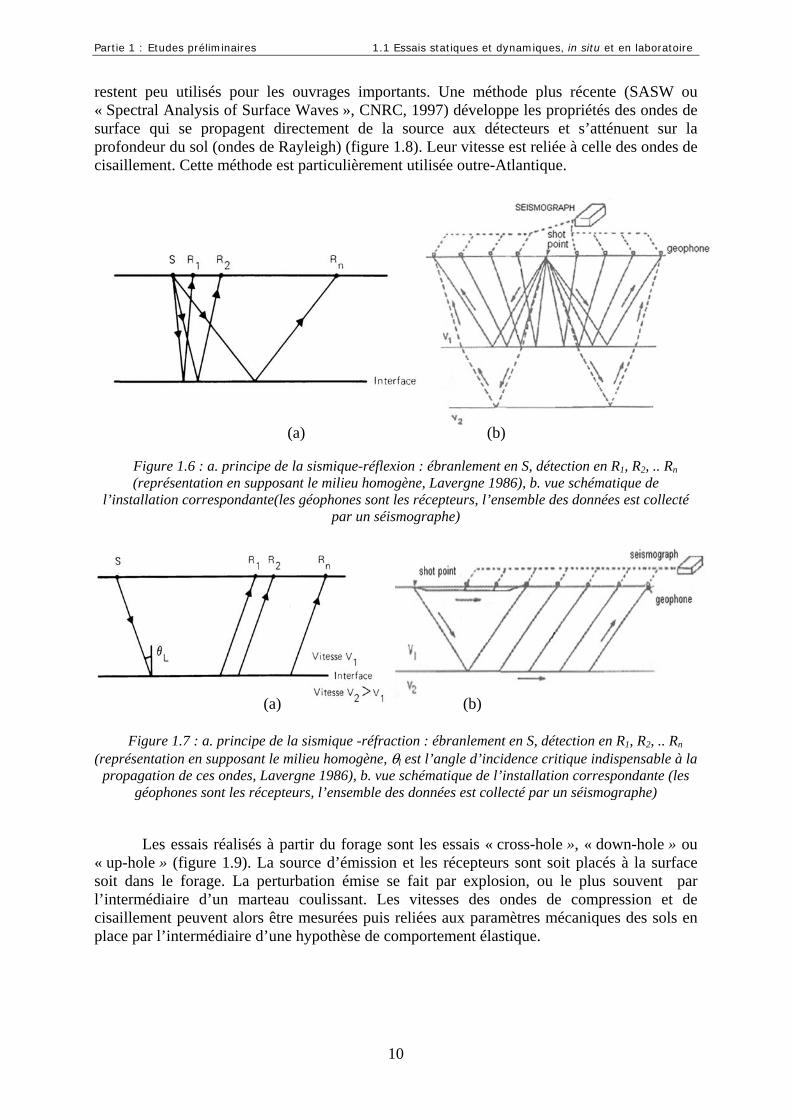
Les essais réalisés à partir de la surface du sol consistent à créer une perturbation mécanique à la surface du sol qui se propage dans le sous-sol par ondes progressives et qui donnent naissance à des phénomènes de réflexion et de transmission lorsqu’elles parviennent aux limites des couches géologiques. Les ondes réfléchies remontent à la surface où elles sont détectées (principe de sismique-réflexion, figure 1.6) ou les ondes transmises peuvent se propager horizontalement sur une certaine distance et remonter ensuite vers la surface (principe de sismique-réfraction, figure 1.7). Ces essais sont faciles à mettre en œuvre mais
9
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
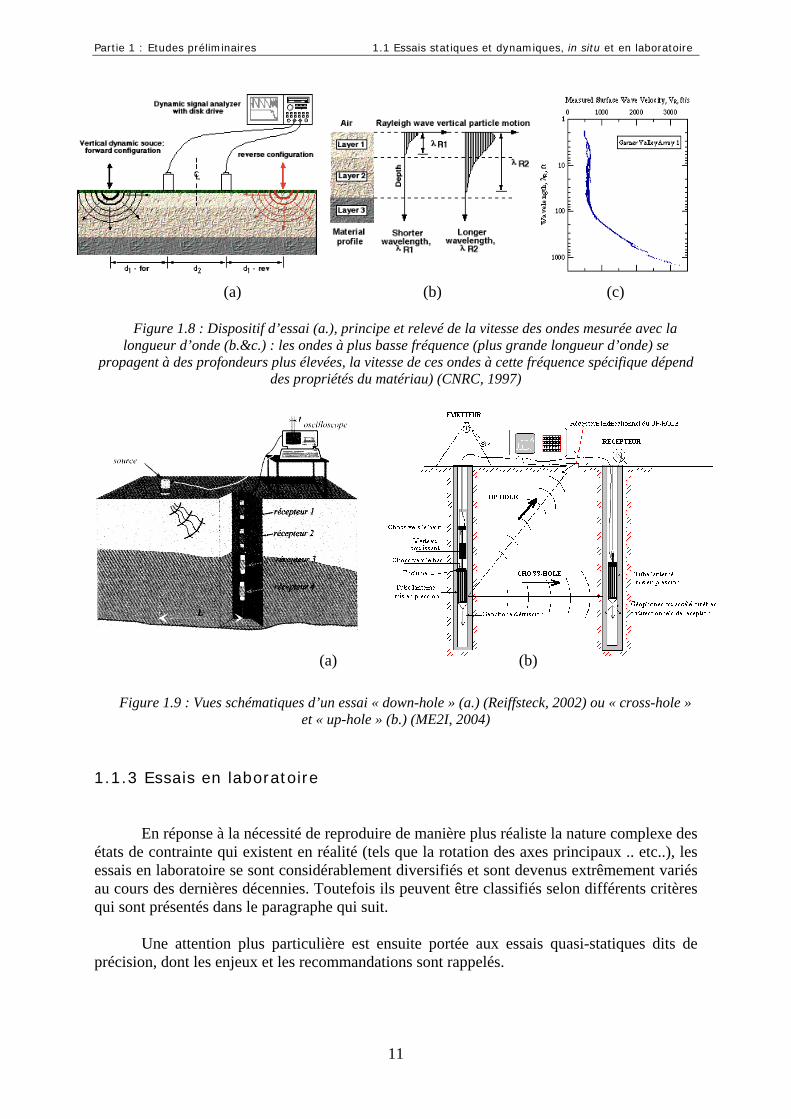
restent peu utilisés pour les ouvrages importants. Une méthode plus récente (SASW ou « Spectral Analysis of Surface Waves », CNRC, 1997) développe les propriétés des ondes de surface qui se propagent directement de la source aux détecteurs et s’atténuent sur la profondeur du sol (ondes de Rayleigh) (figure 1.8). Leur vitesse est reliée à celle des ondes de cisaillement. Cette méthode est particulièrement utilisée outre-Atlantique.
(a) (b)
Figure 1.6 : a. principe de la sismique-réflexion : ébranlement en S, détection en R1, R2, .. Rn (représentation en supposant le milieu homogène, Lavergne 1986), b. vue schématique de
l’installation correspondante(les géophones sont les récepteurs, l’ensemble des données est collecté par un séismographe)
(a) (b)
Figure 1.7 : a. principe de la sismique -réfraction : ébranlement en S, détection en R1, R2, .. Rn (représentation en supposant le milieu homogène, θl est l’angle d’incidence critique indispensable à la
propagation de ces ondes, Lavergne 1986), b. vue schématique de l’installation correspondante (les géophones sont les récepteurs, l’ensemble des données est collecté par un séismographe)
Les essais réalisés à partir du forage sont les essais « cross-hole », « down-hole » ou
« up-hole » (figure 1.9). La source d’émission et les récepteurs sont soit placés à la surface soit dans le forage. La perturbation émise se fait par explosion, ou le plus souvent par l’intermédiaire d’un marteau coulissant. Les vitesses des ondes de compression et de cisaillement peuvent alors être mesurées puis reliées aux paramètres mécaniques des sols en place par l’intermédiaire d’une hypothèse de comportement élastique.
10
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
(a) (b) (c)
Figure 1.8 : Dispositif d’essai (a.), principe et relevé de la vitesse des ondes mesurée avec la longueur d’onde (b.&c.) : les ondes à plus basse fréquence (plus grande longueur d’onde) se
propagent à des profondeurs plus élevées, la vitesse de ces ondes à cette fréquence spécifique dépend des propriétés du matériau) (CNRC, 1997)
(a) (b)
Figure 1.9 : Vues schématiques d’un essai « down-hole » (a.) (Reiffsteck, 2002) ou « cross-hole » et « up-hole » (b.) (ME2I, 2004)
1.1.3 Essais en laboratoire
En réponse à la nécessité de reproduire de manière plus réaliste la nature complexe des états de contrainte qui existent en réalité (tels que la rotation des axes principaux .. etc..), les essais en laboratoire se sont considérablement diversifiés et sont devenus extrêmement variés au cours des dernières décennies. Toutefois ils peuvent être classifiés selon différents critères qui sont présentés dans le paragraphe qui suit.
Une attention plus particulière est ensuite portée aux essais quasi-statiques dits de
précision, dont les enjeux et les recommandations sont rappelés.
11
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
1.1.3.1 Classification
a) Essais homogènes et non-homogènes
Un essai est considéré comme homogène lorsque les champs de contrainte et de déformation sont les mêmes en tout point de l’échantillon testé. Les mesures effectuées de manière plus aisée à sa frontière permettent ainsi de déterminer les valeurs des champs de contrainte et de déformation en tout point. C’est la raison pour laquelle de nombreux essais en laboratoire ont été conçus de manière à développer des champs de contrainte et de déformation les plus uniformes possibles. Toutefois, plusieurs facteurs (par exemple, la géométrie ou la préparation de l’éprouvette, le frettage au niveau des embases .. etc) contrarient cette hypothèse dans la pratique et amènent à considérer des degrés de non-homogénéité.
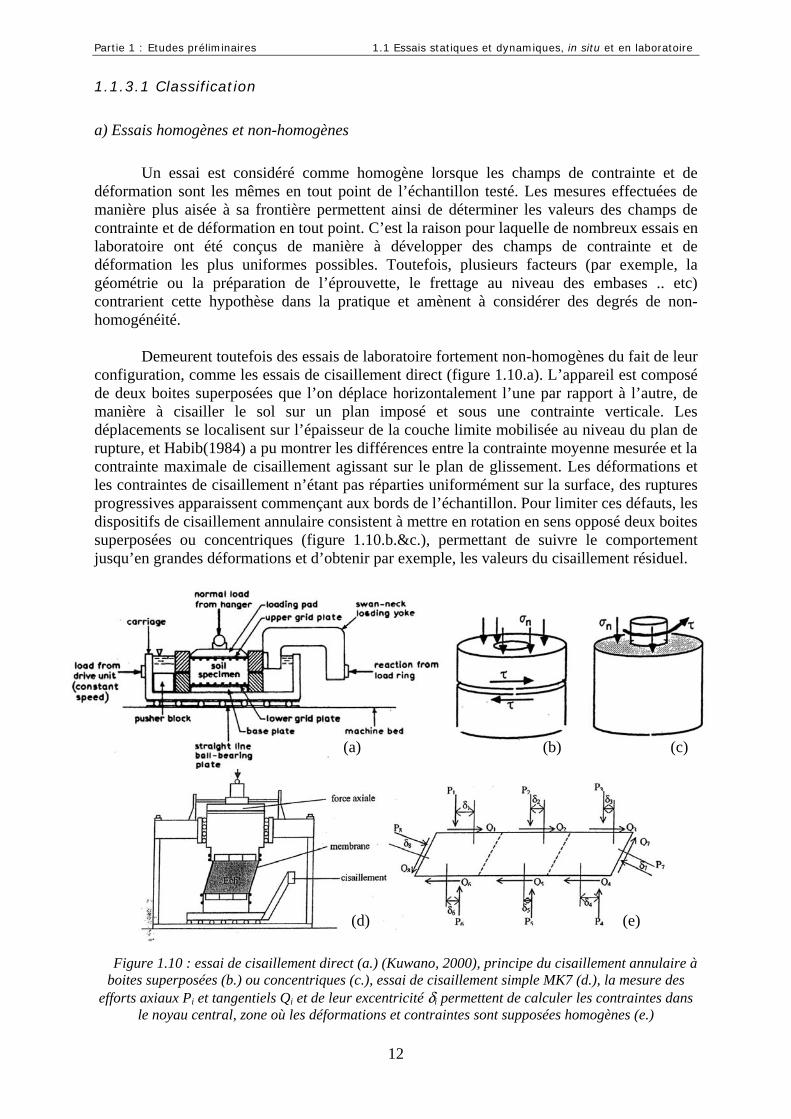
Demeurent toutefois des essais de laboratoire fortement non-homogènes du fait de leur configuration, comme les essais de cisaillement direct (figure 1.10.a). L’appareil est composé de deux boites superposées que l’on déplace horizontalement l’une par rapport à l’autre, de manière à cisailler le sol sur un plan imposé et sous une contrainte verticale. Les déplacements se localisent sur l’épaisseur de la couche limite mobilisée au niveau du plan de rupture, et Habib(1984) a pu montrer les différences entre la contrainte moyenne mesurée et la contrainte maximale de cisaillement agissant sur le plan de glissement. Les déformations et les contraintes de cisaillement n’étant pas réparties uniformément sur la surface, des ruptures progressives apparaissent commençant aux bords de l’échantillon. Pour limiter ces défauts, les dispositifs de cisaillement annulaire consistent à mettre en rotation en sens opposé deux boites superposées ou concentriques (figure 1.10.b.&c.), permettant de suivre le comportement jusqu’en grandes déformations et d’obtenir par exemple, les valeurs du cisaillement résiduel.
(d) (e)
(a) (b) (c)
Figure 1.10 : essai de cisaillement direct (a.) (Kuwano, 2000), principe du cisaillement annulaire à boites superposées (b.) ou concentriques (c.), essai de cisaillement simple MK7 (d.), la mesure des
efforts axiaux Pi et tangentiels Qi et de leur excentricité δi permettent de calculer les contraintes dans le noyau central, zone où les déformations et contraintes sont supposées homogènes (e.)
12
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
Les essais de cisaillement simple, tel que l’appareil MK7 développé à Cambridge (figure 1.10.d&e), sont une adaptation des essais de cisaillement direct, où les champs de contrainte et de déformation deviennent « plus homogènes ». Lors de cet essai, les efforts sont transmis à l’aide de nombreux plateaux rigides instrumentés par des capteurs d’effort normaux et tangentiels.
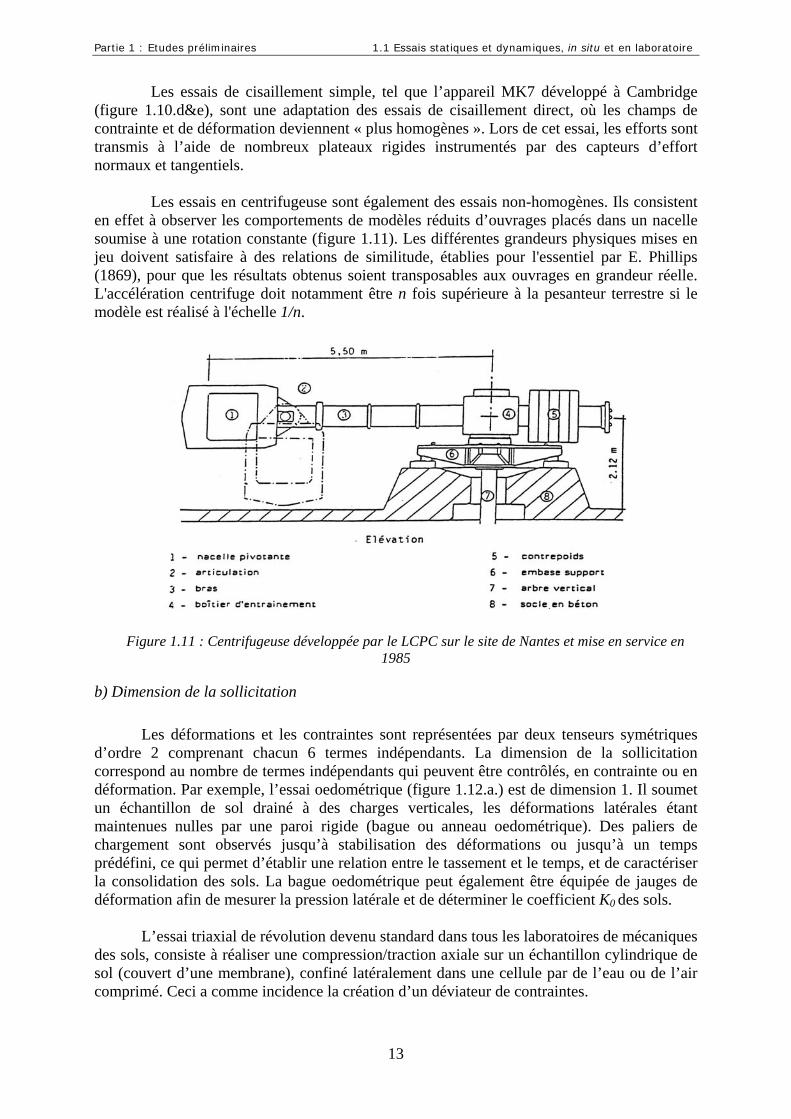
Les essais en centrifugeuse sont également des essais non-homogènes. Ils consistent en effet à observer les comportements de modèles réduits d’ouvrages placés dans un nacelle soumise à une rotation constante (figure 1.11). Les différentes grandeurs physiques mises en jeu doivent satisfaire à des relations de similitude, établies pour l'essentiel par E. Phillips (1869), pour que les résultats obtenus soient transposables aux ouvrages en grandeur réelle. L'accélération centrifuge doit notamment être n fois supérieure à la pesanteur terrestre si le modèle est réalisé à l'échelle 1/n.
Figure 1.11 : Centrifugeuse développée par le LCPC sur le site de Nantes et mise en service en 1985
b) Dimension de la sollicitation
Les déformations et les contraintes sont représentées par deux tenseurs symétriques d’ordre 2 comprenant chacun 6 termes indépendants. La dimension de la sollicitation correspond au nombre de termes indépendants qui peuvent être contrôlés, en contrainte ou en déformation. Par exemple, l’essai oedométrique (figure 1.12.a.) est de dimension 1. Il soumet un échantillon de sol drainé à des charges verticales, les déformations latérales étant maintenues nulles par une paroi rigide (bague ou anneau oedométrique). Des paliers de chargement sont observés jusqu’à stabilisation des déformations ou jusqu’à un temps prédéfini, ce qui permet d’établir une relation entre le tassement et le temps, et de caractériser la consolidation des sols. La bague oedométrique peut également être équipée de jauges de déformation afin de mesurer la pression latérale et de déterminer le coefficient K0 des sols.
L’essai triaxial de révolution devenu standard dans tous les laboratoires de mécaniques des sols, consiste à réaliser une compression/traction axiale sur un échantillon cylindrique de sol (couvert d’une membrane), confiné latéralement dans une cellule par de l’eau ou de l’air comprimé. Ceci a comme incidence la création d’un déviateur de contraintes.
13

Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
(a) (b)
Figure 1.12 : Essai oedométrique (a.) et triaxial de révolution (b.)
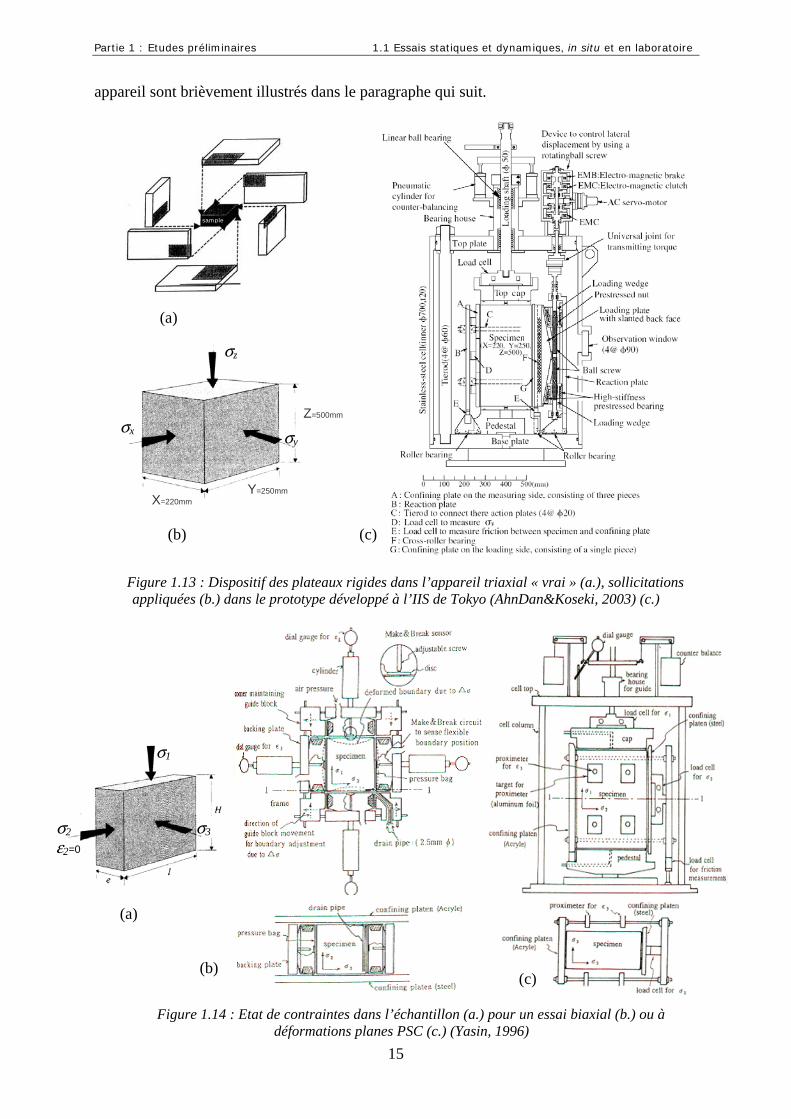
Depuis sa conception initiale par Bishop et Henkel en 1962 (figure 1.12.b), l’appareil d’essai triaxial a subi de nombreuses modifications et ses défauts largement étudiés : dispositifs d’anti-frettage dû aux embases, de rotules pour limiter les moments de flexion parasites dû aux défauts d’axes, prise en compte des effets de membrane, asservissement des déplacements, forces ou pressions .. etc.. Cet appareil est de dimension 2. L’appareil triaxial « vrai », de dimension 3, consiste à solliciter une éprouvette cubique ou parallélépipédique de sol selon les 3 directions de l’espace (figure 1.13.b) par des plateaux rigides ou souples qui l’entourent. Trois configurations sont rencontrées :
- des appareils à interface rigide, où le chargement se fait par l’intermédiaire de six plateaux rigides (figure 1.13.a), permettant une bonne maîtrise des déplacements au niveau des frontières de l’éprouvette d’où une meilleure uniformité et estimation du champ de déformation,
- des appareils à interface souples où les sollicitations sont, dans le cas général, réalisées
à partir d’enceinte de confinement à parois souples ou par l’intermédiaire de coussins (d’air ou d’eau) à pression contrôlable, et qui permettent d’assurer une bonne uniformité du champ de contraintes,
- des appareils mixtes à interfaces rigides et souples, qui cumulent les avantages et les
possibilités des deux précédentes configurations.
L’appareil développé à l’Industrial Institute of Science à Tokyo (figure 1.13.c.) appartient à cette dernière catégorie. Il utilise 4 parois rigides pour les contraintes axiales et latérales σz et σy, et une cellule de confinement pour l’application des contraintes dans la troisième direction, σx. Des cellules de force individuelles mesurent les contraintes dans les différentes directions ainsi que le frottement vertical entre l’échantillon et les interfaces rigides latérales, qui sont lubrifiées. Les appareils à déformation plane (« plane strain compression tests », PSC) ou bi-axiaux sont un cas particulier des vrais triaxiaux, dont deux interfaces rigides et opposées sont fixes (figure 1.14). Ces essais créent des états de déformation plane simulant, par exemple, le comportement d’un sol à l’arrière d’un ouvrage de soutènement. Ils sont de dimension 2.
L’appareil utilisé dans notre étude, qui est un appareil de torsion, compression,
confinement sur cylindre creux est un appareil de dimension 3. Le principe et l’intérêt d’un tel
14
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
appareil sont brièvement illustrés dans le paragraphe qui suit.
(b) (c)
(a)
σy σx
σz
X=220mm Y=250mm
sample
Z=500mm
Figure 1.13 : Dispositif des plateaux rigides dans l’appareil triaxial « vrai » (a.), sollicitations appliquées (b.) dans le prototype développé à l’IIS de Tokyo (AhnDan&Koseki, 2003) (c.)
(c)
σ3 σ2
ε2=0
σ1
(a)
(b)
Figure 1.14 : Etat de contraintes dans l’échantillon (a.) pour un essai biaxial (b.) ou à déformations planes PSC (c.) (Yasin, 1996)
15
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
c) Rotation des axes principaux
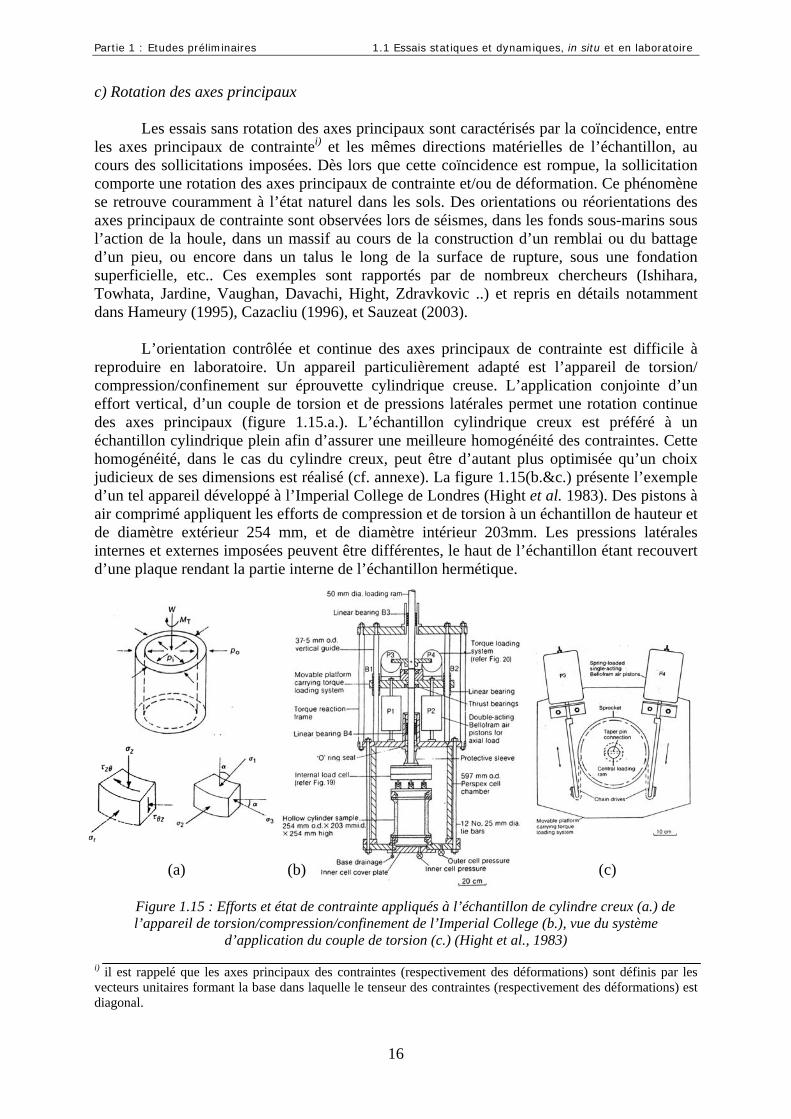
Les essais sans rotation des axes principaux sont caractérisés par la coïncidence, entre les axes principaux de contraintei) et les mêmes directions matérielles de l’échantillon, au cours des sollicitations imposées. Dès lors que cette coïncidence est rompue, la sollicitation comporte une rotation des axes principaux de contrainte et/ou de déformation. Ce phénomène se retrouve couramment à l’état naturel dans les sols. Des orientations ou réorientations des axes principaux de contrainte sont observées lors de séismes, dans les fonds sous-marins sous l’action de la houle, dans un massif au cours de la construction d’un remblai ou du battage d’un pieu, ou encore dans un talus le long de la surface de rupture, sous une fondation superficielle, etc.. Ces exemples sont rapportés par de nombreux chercheurs (Ishihara, Towhata, Jardine, Vaughan, Davachi, Hight, Zdravkovic ..) et repris en détails notamment dans Hameury (1995), Cazacliu (1996), et Sauzeat (2003). L’orientation contrôlée et continue des axes principaux de contrainte est difficile à reproduire en laboratoire. Un appareil particulièrement adapté est l’appareil de torsion/ compression/confinement sur éprouvette cylindrique creuse. L’application conjointe d’un effort vertical, d’un couple de torsion et de pressions latérales permet une rotation continue des axes principaux (figure 1.15.a.). L’échantillon cylindrique creux est préféré à un échantillon cylindrique plein afin d’assurer une meilleure homogénéité des contraintes. Cette homogénéité, dans le cas du cylindre creux, peut être d’autant plus optimisée qu’un choix judicieux de ses dimensions est réalisé (cf. annexe). La figure 1.15(b.&c.) présente l’exemple d’un tel appareil développé à l’Imperial College de Londres (Hight et al. 1983). Des pistons à air comprimé appliquent les efforts de compression et de torsion à un échantillon de hauteur et de diamètre extérieur 254 mm, et de diamètre intérieur 203mm. Les pressions latérales internes et externes imposées peuvent être différentes, le haut de l’échantillon étant recouvert d’une plaque rendant la partie interne de l’échantillon hermétique.
(b)
(a) (c)
Figure 1.15 : Efforts et état de contrainte appliqués à l’échantillon de cylindre creux (a.) de l’appareil de torsion/compression/confinement de l’Imperial College (b.), vue du système
d’application du couple de torsion (c.) (Hight et al., 1983)
i) il est rappelé que les axes principaux des contraintes (respectivement des déformations) sont définis par les vecteurs unitaires formant la base dans laquelle le tenseur des contraintes (respectivement des déformations) est diagonal.
16
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
d) Essais statiques et dynamiques
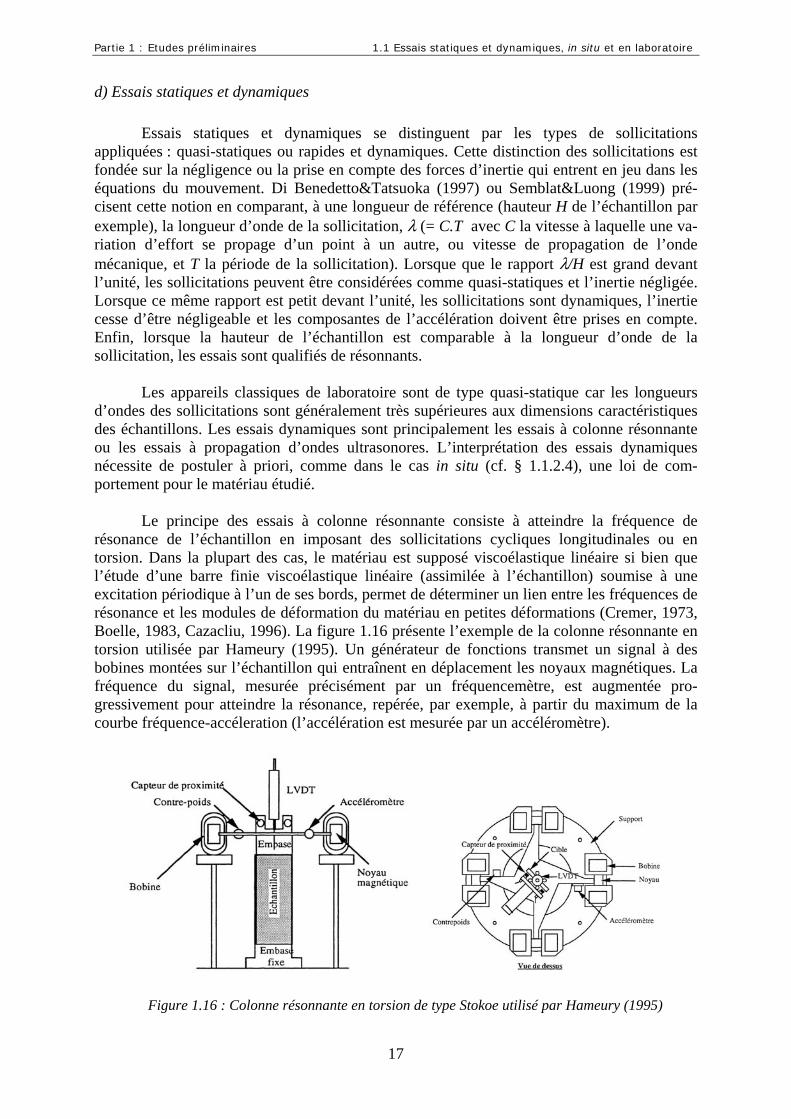
Essais statiques et dynamiques se distinguent par les types de sollicitations appliquées : quasi-statiques ou rapides et dynamiques. Cette distinction des sollicitations est fondée sur la négligence ou la prise en compte des forces d’inertie qui entrent en jeu dans les équations du mouvement. Di Benedetto&Tatsuoka (1997) ou Semblat&Luong (1999) pré-cisent cette notion en comparant, à une longueur de référence (hauteur H de l’échantillon par exemple), la longueur d’onde de la sollicitation, λ (= C.T avec C la vitesse à laquelle une va-riation d’effort se propage d’un point à un autre, ou vitesse de propagation de l’onde mécanique, et T la période de la sollicitation). Lorsque que le rapport λ/H est grand devant l’unité, les sollicitations peuvent être considérées comme quasi-statiques et l’inertie négligée. Lorsque ce même rapport est petit devant l’unité, les sollicitations sont dynamiques, l’inertie cesse d’être négligeable et les composantes de l’accélération doivent être prises en compte. Enfin, lorsque la hauteur de l’échantillon est comparable à la longueur d’onde de la sollicitation, les essais sont qualifiés de résonnants. Les appareils classiques de laboratoire sont de type quasi-statique car les longueurs d’ondes des sollicitations sont généralement très supérieures aux dimensions caractéristiques des échantillons. Les essais dynamiques sont principalement les essais à colonne résonnante ou les essais à propagation d’ondes ultrasonores. L’interprétation des essais dynamiques nécessite de postuler à priori, comme dans le cas in situ (cf. § 1.1.2.4), une loi de com-portement pour le matériau étudié. Le principe des essais à colonne résonnante consiste à atteindre la fréquence de résonance de l’échantillon en imposant des sollicitations cycliques longitudinales ou en torsion. Dans la plupart des cas, le matériau est supposé viscoélastique linéaire si bien que l’étude d’une barre finie viscoélastique linéaire (assimilée à l’échantillon) soumise à une excitation périodique à l’un de ses bords, permet de déterminer un lien entre les fréquences de résonance et les modules de déformation du matériau en petites déformations (Cremer, 1973, Boelle, 1983, Cazacliu, 1996). La figure 1.16 présente l’exemple de la colonne résonnante en torsion utilisée par Hameury (1995). Un générateur de fonctions transmet un signal à des bobines montées sur l’échantillon qui entraînent en déplacement les noyaux magnétiques. La fréquence du signal, mesurée précisément par un fréquencemètre, est augmentée pro-gressivement pour atteindre la résonance, repérée, par exemple, à partir du maximum de la courbe fréquence-accéleration (l’accélération est mesurée par un accéléromètre).
Figure 1.16 : Colonne résonnante en torsion de type Stokoe utilisé par Hameury (1995)
17
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
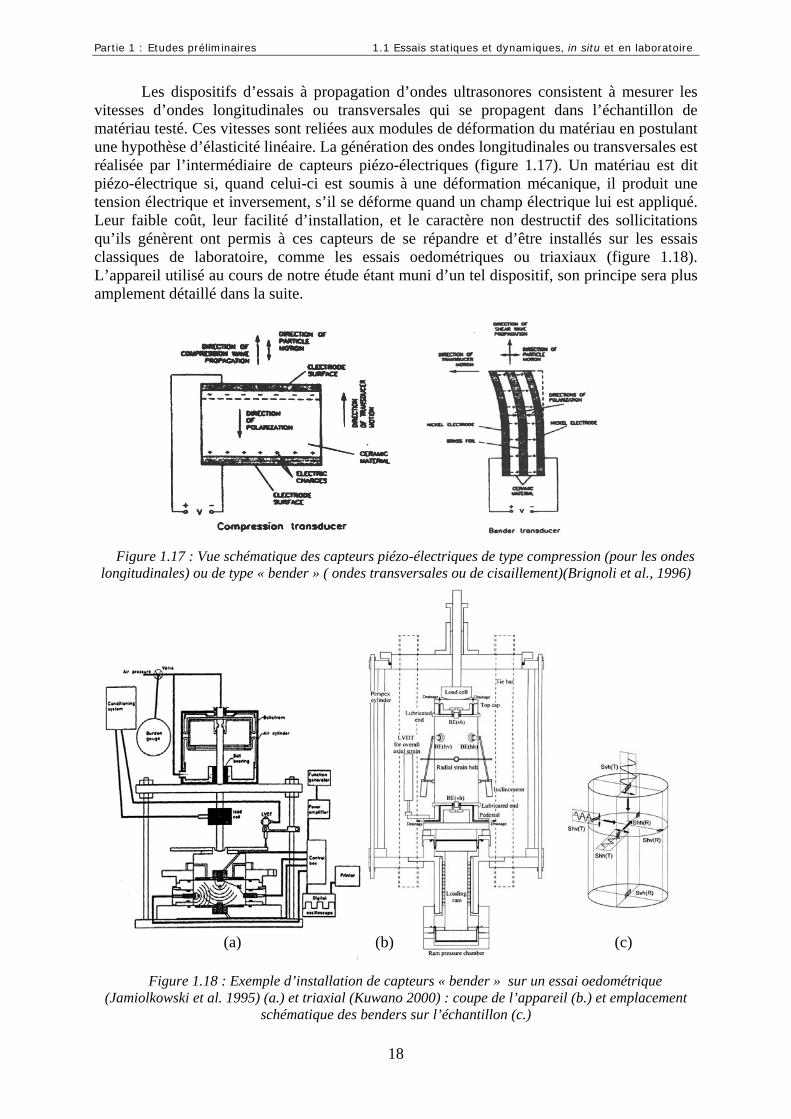
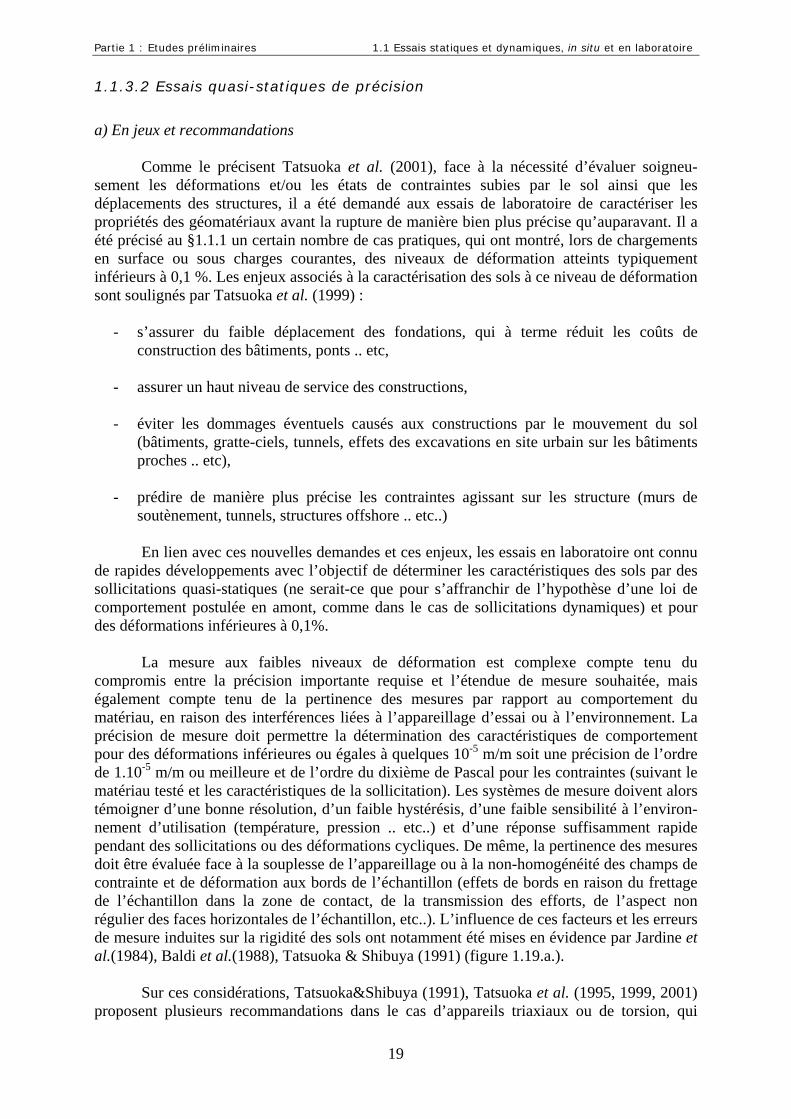
Les dispositifs d’essais à propagation d’ondes ultrasonores consistent à mesurer les vitesses d’ondes longitudinales ou transversales qui se propagent dans l’échantillon de matériau testé. Ces vitesses sont reliées aux modules de déformation du matériau en postulant une hypothèse d’élasticité linéaire. La génération des ondes longitudinales ou transversales est réalisée par l’intermédiaire de capteurs piézo-électriques (figure 1.17). Un matériau est dit piézo-électrique si, quand celui-ci est soumis à une déformation mécanique, il produit une tension électrique et inversement, s’il se déforme quand un champ électrique lui est appliqué. Leur faible coût, leur facilité d’installation, et le caractère non destructif des sollicitations qu’ils génèrent ont permis à ces capteurs de se répandre et d’être installés sur les essais classiques de laboratoire, comme les essais oedométriques ou triaxiaux (figure 1.18). L’appareil utilisé au cours de notre étude étant muni d’un tel dispositif, son principe sera plus amplement détaillé dans la suite.
Figure 1.17 : Vue schématique des capteurs piézo-électriques de type compression (pour les ondes longitudinales) ou de type « bender » ( ondes transversales ou de cisaillement)(Brignoli et al., 1996)
(b) (a) (c)
Figure 1.18 : Exemple d’installation de capteurs « bender » sur un essai oedométrique (Jamiolkowski et al. 1995) (a.) et triaxial (Kuwano 2000) : coupe de l’appareil (b.) et emplacement
schématique des benders sur l’échantillon (c.)
18
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
1.1.3.2 Essais quasi-statiques de précision
a) En jeux et recommandations
Comme le précisent Tatsuoka et al. (2001), face à la nécessité d’évaluer soigneu-sement les déformations et/ou les états de contraintes subies par le sol ainsi que les déplacements des structures, il a été demandé aux essais de laboratoire de caractériser les propriétés des géomatériaux avant la rupture de manière bien plus précise qu’auparavant. Il a été précisé au §1.1.1 un certain nombre de cas pratiques, qui ont montré, lors de chargements en surface ou sous charges courantes, des niveaux de déformation atteints typiquement inférieurs à 0,1 %. Les enjeux associés à la caractérisation des sols à ce niveau de déformation sont soulignés par Tatsuoka et al. (1999) :
- s’assurer du faible déplacement des fondations, qui à terme réduit les coûts de construction des bâtiments, ponts .. etc,
- assurer un haut niveau de service des constructions,
- éviter les dommages éventuels causés aux constructions par le mouvement du sol
(bâtiments, gratte-ciels, tunnels, effets des excavations en site urbain sur les bâtiments proches .. etc),
- prédire de manière plus précise les contraintes agissant sur les structure (murs de
soutènement, tunnels, structures offshore .. etc..)
En lien avec ces nouvelles demandes et ces enjeux, les essais en laboratoire ont connu de rapides développements avec l’objectif de déterminer les caractéristiques des sols par des sollicitations quasi-statiques (ne serait-ce que pour s’affranchir de l’hypothèse d’une loi de comportement postulée en amont, comme dans le cas de sollicitations dynamiques) et pour des déformations inférieures à 0,1%.
La mesure aux faibles niveaux de déformation est complexe compte tenu du compromis entre la précision importante requise et l’étendue de mesure souhaitée, mais également compte tenu de la pertinence des mesures par rapport au comportement du matériau, en raison des interférences liées à l’appareillage d’essai ou à l’environnement. La précision de mesure doit permettre la détermination des caractéristiques de comportement pour des déformations inférieures ou égales à quelques 10-5 m/m soit une précision de l’ordre de 1.10-5 m/m ou meilleure et de l’ordre du dixième de Pascal pour les contraintes (suivant le matériau testé et les caractéristiques de la sollicitation). Les systèmes de mesure doivent alors témoigner d’une bonne résolution, d’un faible hystérésis, d’une faible sensibilité à l’environ-nement d’utilisation (température, pression .. etc..) et d’une réponse suffisamment rapide pendant des sollicitations ou des déformations cycliques. De même, la pertinence des mesures doit être évaluée face à la souplesse de l’appareillage ou à la non-homogénéité des champs de contrainte et de déformation aux bords de l’échantillon (effets de bords en raison du frettage de l’échantillon dans la zone de contact, de la transmission des efforts, de l’aspect non régulier des faces horizontales de l’échantillon, etc..). L’influence de ces facteurs et les erreurs de mesure induites sur la rigidité des sols ont notamment été mises en évidence par Jardine et al.(1984), Baldi et al.(1988), Tatsuoka & Shibuya (1991) (figure 1.19.a.).
Sur ces considérations, Tatsuoka&Shibuya (1991), Tatsuoka et al. (1995, 1999, 2001)
proposent plusieurs recommandations dans le cas d’appareils triaxiaux ou de torsion, qui
19
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
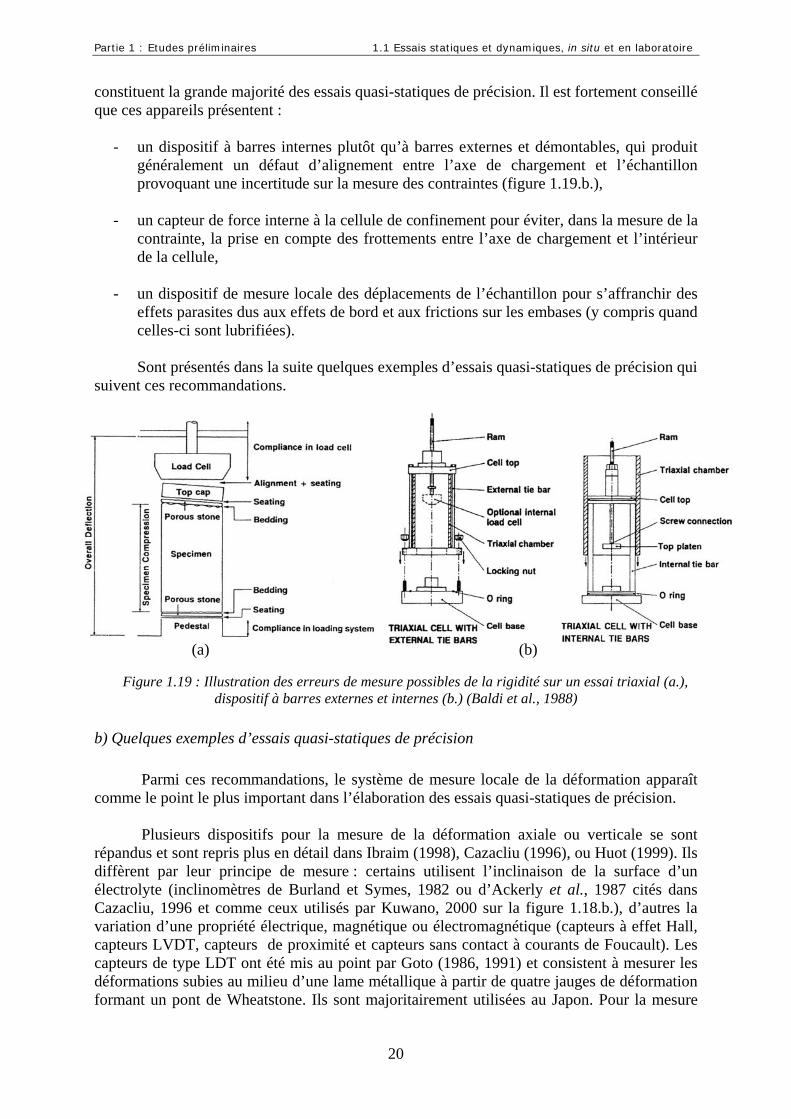
constituent la grande majorité des essais quasi-statiques de précision. Il est fortement conseillé que ces appareils présentent :
- un dispositif à barres internes plutôt qu’à barres externes et démontables, qui produit
généralement un défaut d’alignement entre l’axe de chargement et l’échantillon provoquant une incertitude sur la mesure des contraintes (figure 1.19.b.),
- un capteur de force interne à la cellule de confinement pour éviter, dans la mesure de la
contrainte, la prise en compte des frottements entre l’axe de chargement et l’intérieur de la cellule,
- un dispositif de mesure locale des déplacements de l’échantillon pour s’affranchir des
effets parasites dus aux effets de bord et aux frictions sur les embases (y compris quand celles-ci sont lubrifiées).
Sont présentés dans la suite quelques exemples d’essais quasi-statiques de précision qui suivent ces recommandations. (a) (b)
Figure 1.19 : Illustration des erreurs de mesure possibles de la rigidité sur un essai triaxial (a.), dispositif à barres externes et internes (b.) (Baldi et al., 1988)
b) Quelques exemples d’essais quasi-statiques de précision
Parmi ces recommandations, le système de mesure locale de la déformation apparaît comme le point le plus important dans l’élaboration des essais quasi-statiques de précision.
Plusieurs dispositifs pour la mesure de la déformation axiale ou verticale se sont
répandus et sont repris plus en détail dans Ibraim (1998), Cazacliu (1996), ou Huot (1999). Ils diffèrent par leur principe de mesure : certains utilisent l’inclinaison de la surface d’un électrolyte (inclinomètres de Burland et Symes, 1982 ou d’Ackerly et al., 1987 cités dans Cazacliu, 1996 et comme ceux utilisés par Kuwano, 2000 sur la figure 1.18.b.), d’autres la variation d’une propriété électrique, magnétique ou électromagnétique (capteurs à effet Hall, capteurs LVDT, capteurs de proximité et capteurs sans contact à courants de Foucault). Les capteurs de type LDT ont été mis au point par Goto (1986, 1991) et consistent à mesurer les déformations subies au milieu d’une lame métallique à partir de quatre jauges de déformation formant un pont de Wheatstone. Ils sont majoritairement utilisées au Japon. Pour la mesure
20

Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
locale de la déformation latérale (ou radiale dans le cas d’échantillons cylindriques), les systèmes consistent à mesurer les variations du diamètre de l’échantillon à l’aide de dispositifs de forme annulaire fixés sur l’échantillon (colliers ou anneaux de mesure développés dans Doanh, 1984 ou Huot, 1999) ou alors, des dispositifs identiques à la mesure verticale sont utilisées (capteurs sans contact, LDT).
Les figures 1.20, 1.21 et 1.22 présentent quelques exemples d’essais quasi-statiques de
précision : respectivement, un large essai triaxial véritable développé à l’IIS de Tokyo (Hoque 1996) (barres et capteur de force internes, capteurs de type LDT et capteurs sans contact pour les mesures verticales et latérales), les essais de torsion sur cylindre creux développé à l’Imperial College de Londres (voir également figure 1.15) (barres et capteur de force internes, mesures verticales et latérales par des inclinomètres, radiales par des capteurs sans contact fixes) et celui développé à l’IIS de Tokyo (barres et capteur de force internes - non représentés, mesures verticales et latérales par un système triangulaire de LDT, mesures radiales par des capteurs sans contact) et enfin, l’appareil triaxial de révolution développé à l’ENTPE par Pham Van Bang (2004). Pour cet appareil (figure 1.22), le dispositif de mesures radiales est constitué de capteurs sans contact de très faible étendue de mesure (1 mm) déplaçables de l’extérieur de la cellule par des mini-moteurs. La précision atteinte est ainsi de quelques 10-6 m/m. Les mesures verticales sont réalisées à partir de capteurs identiques, sans contact, visant des cibles en duralumin positionnées sur des anneaux fixés à l’échantillon. Ce dernier système est identique à celui employé sur l’appareil de torsion sur cylindre creux utilisé au cours de notre étude. Il est plus précisément détaillé dans la partie 2. L’appareil dispose également de capteurs piézo-électriques de compression et de type « bender » situés dans chacune des embases. L’appareil triaxial de révolution développé à l’Imperial College (Kuwano, 2000, figure 1.18) est également similaire à l’essai développé par Pham Van Bang (2004), en ce sens qu’il dispose de barres internes, d’un capteur de force interne à la cellule, de mesures locales de la déformation (à partir d’inclinomètres et d’un collier de mesure pour une précision de plusieurs 10-5 m/m) mais également de capteurs de type « bender ».
Figure 1.20 : a. Coupe de l’appareil triaxial développé à l’IIS de Tokyo b. système de mesure des déformations (précision estimée à quelques 10-6m/m) (Hoque, 1996)
(a) (b)
21
Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
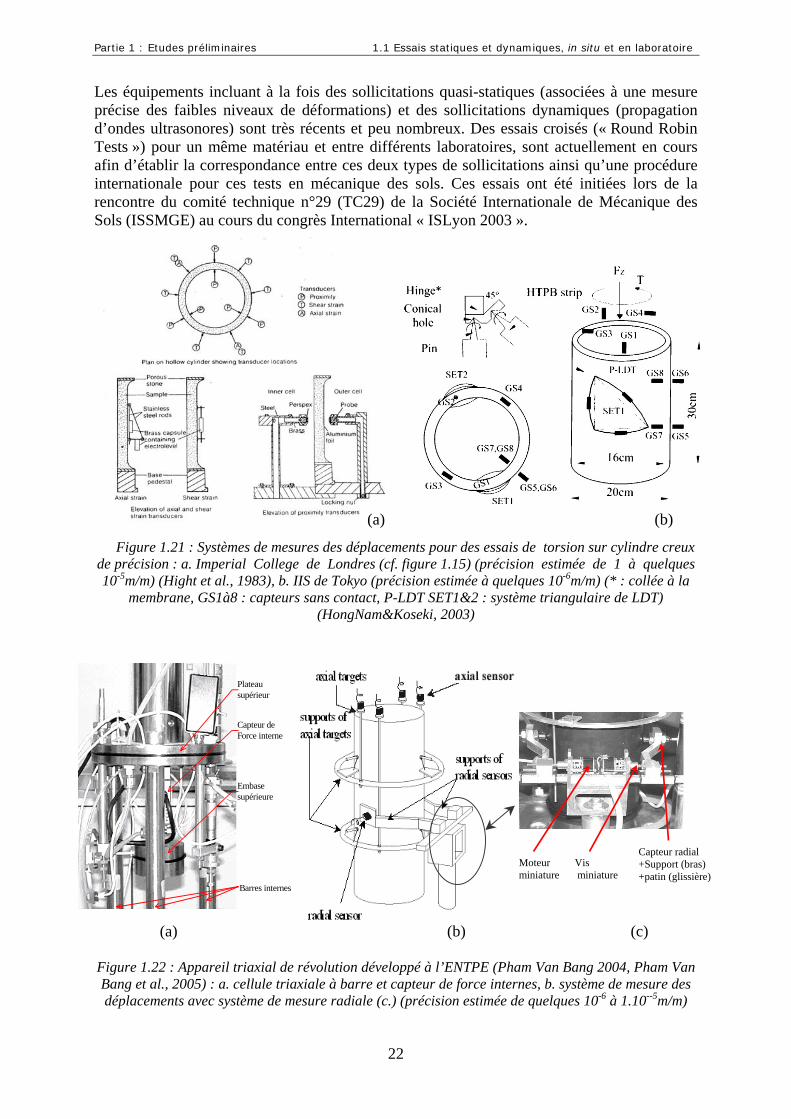
Les équipements incluant à la fois des sollicitations quasi-statiques (associées à une mesure précise des faibles niveaux de déformations) et des sollicitations dynamiques (propagation d’ondes ultrasonores) sont très récents et peu nombreux. Des essais croisés (« Round Robin Tests ») pour un même matériau et entre différents laboratoires, sont actuellement en cours afin d’établir la correspondance entre ces deux types de sollicitations ainsi qu’une procédure internationale pour ces tests en mécanique des sols. Ces essais ont été initiées lors de la rencontre du comité technique n°29 (TC29) de la Société Internationale de Mécanique des Sols (ISSMGE) au cours du congrès International « ISLyon 2003 ».
Figure 1.21 : Systèmes de mesures des déplacements pour des essais de torsion sur cylindre creux de précision : a. Imperial College de Londres (cf. figure 1.15) (précision estimée de 1 à quelques 10-5m/m) (Hight et al., 1983), b. IIS de Tokyo (précision estimée à quelques 10-6m/m) (* : collée à la
membrane, GS1à8 : capteurs sans contact, P-LDT SET1&2 : système triangulaire de LDT) (HongNam&Koseki, 2003)
(a) (b)
Capteur radial +Support (bras) +patin (glissière)
Barres internes
Capteur de Force interne
Embase supérieure
Plateau supérieur
(a) (b)
Figure 1.22 : Appareil triaxial de révolution développé à l’ENTPE (PhBang et al., 2005) : a. cellule triaxiale à barre et capteur de force intedéplacements avec système de mesure radiale (c.) (précision estimée d
22
Moteur miniature
am Van Brnes, b. sye quelqu
Vis miniature
(c)
ang 2004, Pham Van stème de mesure des es 10-6 à 1.10--5m/m)

Partie 1 : Etudes préliminaires 1.1 Essais statiques et dynamiques, in situ et en laboratoire
1.1.4 Conclusion
Dans la plupart des problèmes rencontrés par les ingénieurs géotechniciens, l’évaluation précise des paramètres de comportement des sols est requise pour l’analyse des déformations de ces sols et des déplacements induits sur les structures. De nombreuses méthodes pour estimer les propriétés des sols sont actuellement utilisées in situ ou en laboratoire. Dans ce premier paragraphe sont présentés brièvement les essais courants réalisés in situ et en laboratoire.
Les essais in situ comprennent, entre autres, les essais de pénétration, de cisaillement,
d’expansion et les essais sismiques. Leur utilisation est pratiquement systématique pour n’importe quel ouvrage important en génie civil. Mais à leur avantageuse rapidité s’ajoute la qualité variable de ces essais dont l’analyse se fonde surtout sur des considérations empiriques manquant de fondements théoriques (sauf dans une certaine mesure pour les essais d’expansion, et pour les essais sismiques). Les chemins de contraintes effectives ou de déformation et les conditions aux limites spatiales sont également inconnues ou mal définies dans le cas général (pénétromètre, scissomètre, ..).
D’un autre côté, les essais en laboratoire, qui sont présentés dans un second temps,
sont réalisées en conditions maîtrisées mais demandent pour évaluer les propriétés des sols en place des prélèvements de bonne qualité, peu remaniés et sont généralement très coûteux en temps et en technicité. Ces essais se sont considérablement diversifiés au cours de ces dernières années dans le but de reproduire la nature complexe des sollicitations appliquées aux sols. De plus, depuis une vingtaine d’années se développent des essais de précision dont les systèmes de mesure de plus en plus performants permettent d’évaluer les propriétés des sols pour des déformations inférieures ou égales à 10-5 m/m. Un certain nombre de cas pratiques présents dans la littérature (Burland, 1989, Jardine et Potts, 1988, Tatsuoka & Kohata, 1995, Koseki et al., 2001) souligne la pertinence de disposer des caractéristiques des sols à ces niveaux de déformations. Certains de ces appareils de précision présentent également des dispositifs de sollicitations dynamiques (propagations d’ondes ultrasonores). Pour ces sollicitations particulières appliquées aussi in situ (exemple des essais de type « cross-hole », « down-hole » ou « up-hole »), les paramètres de comportement des sols sont obtenus par analyse inverse, c’est-à-dire de manière indirecte. Il est nécessaire de postuler, en amont, une hypothèse sur le comportement du sol. Une hypothèse de comportement élastique linéaire peut être considérée. Ces types d’essais sont exploités au cours de notre étude (aussi bien in situ qu’en laboratoire). Il est donc proposé de rappeler le cadre des équations mises en jeu et de considérer des hypothèses et des approches de complexité croissante, selon que l’on considère le sol comme un milieu continu monophasique, ou biphasique lorsque celui-ci est saturé. C’est l’objet des paragraphes qui suivent.
23

24

Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
1.2 Propagation d’ondes dans un milieu continu
élastique Le sol peut être considéré en première approximation comme un milieu continu. La mécanique des milieux continus permet alors d’établir un lien entre les déformations qu’il subit et les contraintes qui s’y sont développées. Ce lien est donné par une loi de comportement. Compte tenu des déformations mises en jeu lors des sollicitations dynamiques, (par exemple de l’ordre de 10-7 m/m selon Kuwano, 2000 et Sauzeat, 2003 pour des essais de propagations d’ondes ultrasonores), la loi de comportement adoptée est généralement une loi élastique linéaire isotrope, ou isotrope transverse (= orthotrope de révolution). Ces lois sont brièvement rappelées dans un premier temps. Puis les équations de propagation d’ondes dans des milieux caractérisés par de telles lois sont établies.
1.2.1 Elasticité linéaire
L’élasticité est définie comme la tendance d’un corps à reprendre la forme et les dimensions qu’il avait avant une sollicitation lorsqu’on supprime cette sollicitation (GFR 1988). Un corps est idéalement élastique lorsqu’il évolue de manière totalement réversible (sans déformation permanente) et que toute transformation subie produit une dissipation nulle (conservation de l’énergie). La linéarité implique de plus, que la relation entre les contraintes et les déformations soit linéaire. Sous l’hypothèse de petites transformations (engendrant des petits déplacements et des petites rotations), une loi de comportement élastique linéaire s’écrit, dans un repère orthonormé (O, 1e
ur, 2eur
, 3eur
) :
{ } ou 1 2 3ij ijkl ij ij ijkl ijC M i, j= = ∀σ ε ε σ , ,∈ (1.1&1.2)
où 12
jiij
j i
uux x
ε⎛ ⎞∂∂= +⎜⎜ ∂ ∂⎝ ⎠
⎟⎟ est le tenseur des déformations linéarisé, ( { }1 2 3iu i , ,∈ , désignant le
champ des déplacements), est le tenseur des contraintes, ijσ Cijkl, Mijkl des tenseurs supposés symétriques d’ordre 4, désignés respectivement par tenseur de rigidité et de souplesse.
Les tenseurs Cijkl, Mijkl vérifient ainsi les relations suivantes :
{ } , , , 1, 2,3ijkl jikl ijlk jilk klij
ijkl jikl ijlk jilk klij
C C C C Ci j k l
M M M M M
= = = =⎧⎪ ∀ ∈⎨ = = = =⎪⎩ (1.3)
Les tenseurs de déformation { ( )
1 ; 3ij i j≤ ≤=ε ε } et de contrainte { ( )
1 ; 3ij i j≤ ≤=σ σ } sont des
tenseurs d’ordre 2 symétriques. Seules 6 composantes de ces tenseurs sont ainsi nécessaires pour décrire le comportement d’un matériau. La notation vectorielle est souvent utilisée, permettant de réduire le tenseur C ou M à un tenseur d’ordre 2. La relation 1.1 (ou indifféremment la relation 1.2) peut se réécrire sous la forme :
25

Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
Cσ ε=ur r
⇔
11 1111 12 13 14 15 16
22 2222 23 24 25 26
33 3333 34 35 36
23 2344 45 46
55 5613 13
6612 12
2 2
2 2
2 2
C C C C C CC C C C C
C C C CC C C
C CC
⎡ ⎤ ⎡⎡ ⎤⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢⎢ ⎥ ⎢= ⎢⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎣ ⎦⎢ ⎥ ⎢⎣ ⎦ ⎣
σ εσ εσ ε
σ εσ εσ ε
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
(1.4)
(sym.)
où les vecteurs contrainte et déformation sont exprimés de telle manière à conserver la même norme que celles des tenseurs σ ou ε . Le tenseur C comporte ainsi 21 paramètres indépendants dont le nombre peut être considérablement réduit si l’on prend soin de considérer les symétries matérielles du matériau.
1.2.1.1 Elasticité linéaire isotrope
Un matériau est défini comme isotrope quand la distribution et la forme des particules
qui le constituent est statistiquement indépendante de l’orientation et du choix des axes (Biarez & Hicher, 1994) ou autrement dit, quand ses symétries matérielles impliquent une invariance de ses propriétés avec les directions de l’espace. Dans le cas d’un matériau élastique linéaire isotrope, la loi de comportement 1.1 ou 1.4 se réduit à (loi de Hooke datée du 17e siècle) :
{ }2ij ij kk ij i,j 1,2,3∀ ∈= +σ µε λε δ (1.5)
en utilisant la convention d’Einstein (sommation sur les indices répétés) et où est le symbole de Kronecker.
ijδ, λ µ sont les coefficients de Lamé. µ est également désigné comme
le module de cisaillement noté G en mécanique des sols. Le nombre de paramètres élastiques indépendants se réduit ainsi à 2 pour un tel
matériau. La relation inverse liant les déformations aux contraintes s’écrit :
{1ij ij kk ij E E
i,j 1,2,3+ ∀= − }∈ν νε σ σ δ (1.6)
où E est défini comme le module d’Young, et ν le coefficient de Poisson. La relation 1.6 s’écrit sous forme matricielle :
11 11
22 22
33 33
23 23
13 13
12 12
1 0 0 0
1 0 0 0
1 0 0 0
2 21 0 02 2
1 02 2
1
E E E
E E
E
E
E
E
ν ν⎡ ⎤− −⎢ ⎥⎢ ⎥
ν⎢ ⎥ε σ⎡ ⎤ ⎡−⎢ ⎥⎢ ⎥ ⎢ε ⎢⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢ε σ⎢ ⎥⎢ ⎥ ⎢= ⎢ ⎥ε σ+ ν⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢ε σ⎢ ⎥⎢ ⎥ ⎢⎢ ⎥+ ν⎢ ⎥ ⎢ε σ⎢ ⎥ ⎢⎢ ⎥⎣ ⎦ ⎣⎢ ⎥
+ ν⎢ ⎥⎢ ⎥⎣ ⎦
⎤⎥σ⎥ ⎥⎥⎥⎥⎥⎥⎥⎥⎦
(1.7)
(sym.)
26

Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
Le module de compressibilité K est défini comme le module reliant la contrainte moyenne ( kktr( ) / 3 / 3σ σ= ) à la déformation volumique ( kktr( )ε ε= ) :
1 22 33 3
tr( ) .tr( ) .tr( ) tr( ) .tr( ) K .tr( )⎛ ⎞= + ⇒ = + =⎜ ⎟⎝ ⎠
µσ µ ε λ ε σ λ ε ε (1.8)
Les paramètres élastiques sont ainsi reliées par les expression suivantes :
( 3 2 )E =
2( )2 EK G= =3 2
µ λ µ λνλ µ λ µ
λ µ µ(1+ )ν
+⎧ =⎪ + +⎪⎨⎪ = +⎪⎩
(1.9)
1.2.1.2 Elasticité linéaire isotrope transverse (orthotrope de révolution)
Une loi est dite orthotrope dans un repère donné si elle est symétriquei) par rapport aux
trois plans contenant deux à deux les axes définissant ce repère. Lorsqu’une symétrie de révolution est de plus supposée par rapport à un de ces axes, la loi est orthotrope de révolution ou isotrope transverse.
Ces propriétés sont souvent utilisées dans la réalité pour décrire le comportement des
sols naturels. En effet, la majorité des sols se sont déposés géologiquement par sédimentation horizontale et n’ont ensuite subi que des charges verticales uniformes. Il est raisonnable de penser que les propriétés de ces sols soient identiques dans un plan horizontal (quelque soit la direction considérée dans ce plan), et qu’une symétrie soit réalisée par rapport à un axe vertical. Leurs propriétés dans une direction horizontale diffèrent alors de celles dans la direction verticale. Une loi de comportement isotrope transverse constitue alors une bonne approximation de l’anisotropie induite dans ces sols.
Dans ce cas et compte tenu des propriétés mentionnées, il peut être montré que la relation 1.2 se réduit dans le repère (O, 1e
ur, 2eur
, 3eur
) ( 3eur
est l’axe vertical) à :
1312
1 1 3
13
11 111 3
22 22
33 333
23 23
2313 13
12 12
23
12
12 1
1 0 0 0
1 0 0 0
1 0 0 0
2 21 0 022 2
12 202
112
E E E
E E
E
G
G
G E
−−⎡ ⎤⎢ ⎥⎢ ⎥⎢ − ⎥⎢ ⎥⎡ ⎤ ⎡⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢=⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥ ⎢⎣ ⎦ ⎣⎢ ⎥⎢ ⎥⎢ ⎥+=⎢ ⎥⎢ ⎥⎣ ⎦
νν
νε σε σε σ
ε σε σε σ
ν
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
(1.10)
(sym.)
i) une loi est symétrique par rapport à un plan (P) si en transmuant le tenseur des déformations par une symétrie par rapport à (P), on transmue également le tenseur des contraintes par cette même symétrie.
27

Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
où Ei est le module d’Young dans la direction i, Gij le module de cisaillement dans le plan contenant les directions i et j, νij est le coefficient de Poisson pour la déformation dans la direction i, sous l’effet d’une
sollicitation dans la direction j ( iiij
jj
ενε
= − lorsque seul ) . jj 0σ ≠
Le tenseur reliant déformations et contraintes comporte alors 5 paramètres indépen-dants : 121 23 13,E , E , , G 3ν ν .
1.2.2 Propagation d’ondes dans un milieu élastique linéaire
L’application de la conservation de la quantité de mouvement au milieu continu supposé antérieurement en équilibre fournit :
²udiv( )t²
σ ργ ρ ∂= =∂
ruuur r
(1.11)
avec divuuur
l’opérateur divergence d’un tenseur d’ordre 2 et ρ la masse volumique du milieu continu (supposée constante).
Il est indispensable ensuite de postuler une loi de comportement du milieu ou relation constitutive qui relie contraintes et déformations dans le milieu (relation 1.1) et qui peut s’écrire sous la forme suivante :
C :=σ ε (1.12) où « : » dénote le produit contracté. De même, le tenseur des déformations relié au champ des déplacements s’écrit sous forme matricielle à partir de l’opérateur gradient appliqué à un vecteur ( grad ) :
12
tgrad( u ) grad ( u )⎡ ⎤= +⎣ ⎦r r
ε (1.13)
En remplaçant l’expression du tenseur des contraintes σ (relations 1.12 et 1.13), dans la relation 1.11, il vient :
12
t ²udiv( C : grad( u ) grad ( u ) )t²
∂⎡ ⎤+ =⎣ ⎦ ∂
ruuur r r
ρ (1.14)
Cette équation est l’équation générale de propagation d’une onde dans un milieu continu élastique. En postulant l’hypothèse d’ondes planes, la solution de cette équation est généralement écrite sous la forme :
0l.OPu( P,t ) u .exp i ( t )
c⎡ ⎤
= ω −⎢ ⎥⎣ ⎦
r uuurr uur
(1.15)
i) cette hypothèse fait disparaître l’influence des champs de forces volumiques
28

Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
Le champ de déplacement dépend de la position du point considéré P et du temps t. A tout instant, u
r est constant le long de plans perpendiculaires à la direction de propagation
1 1 2 2 3 3l l e l e l e= + +r ur ur ur
et les solutions se propagent à une vitesse c.
Afin de résoudre plus aisément l’équation 1.14 (en injectant dans celle-ci la forme de la solution 1.15), il convient de simplifier les notations en utilisant les formes vectorielles à 6 composantes des tenseurs σ et ε comme présentées précédemment (relation 1.4). Les opérateurs gradient et divergence doivent alors être réécrits compte tenu de ces notations :
1
11 2
22
133 3
223
33 213
12
3 1
2 1
0 0
0 0
0 0
2 1 102 22
1 12 02 2
1 1 02 2
x
x
ux
uu
x x
x x
x x
∂⎡ ⎤⎢ ⎥∂⎢ ⎥
∂⎢ ⎥⎢ ⎥⎡ ⎤ ∂⎢ ⎥⎢ ⎥⎢ ⎥∂⎢ ⎥
⎛ ⎞⎢ ⎥⎢ ⎥ ∂ ⎜ ⎟⎢ ⎥⎢ ⎥= = ⎜ ⎟⎢ ⎥∂ ∂⎢ ⎥ ⎜ ⎟⎢ ⎥⎢ ⎥ ⎝ ⎠∂ ∂⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ∂ ∂⎢ ⎥⎣ ⎦ ⎢ ⎥∂ ∂⎢ ⎥⎢ ⎥∂ ∂⎢ ⎥
∂ ∂⎢ ⎥⎣ ⎦
εεε
ε ε
εε
11
221 3
33
232 3 1
13
3 2 1 12
1 10 0 02 2
1 10 0 0 22 21 1 20 0 02 2 2
x x
div( )x x x
x x x
⎡ ⎤⎡ ⎤∂ ∂ ⎢ ⎥⎢ ⎥∂ ∂ ⎢ ⎥⎢ ⎥ ⎢⎢ ⎥∂ ∂ ∂ ⎢= ⎢ ⎥∂ ∂ ∂ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥∂ ∂ ∂ ⎢ ⎥⎢ ⎥ ⎢ ⎥∂ ∂ ∂⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
σσσ
σ σσσ
2x∂
∂⎥⎥ (1.16&1.17)
Il vient qu’en remplaçant la forme de la solution (relation 1.15) dans l’équation 1.14, l’expression générale suivante est obtenue après simplification :
1
211 12 13 14 15 16
1 3 2 322 23 24 25 26
33 34 35 36 3 22 3 1
44 45 46
3 155 563 2 1
66
2 1
0 00 0
1 10 0 0 0 02 2
1 11 1 00 0 0 2 22 21 11 1 00 0 0 2 22 21 1 02 2
llC C C C C C
l l l lC C C C CC C C C² l ll l l
C C Cc²l lC Cl l l
Cl l
⎡ ⎤⎢⎢⎡ ⎤⎡ ⎤⎢⎢ ⎥⎢ ⎥⎢⎢ ⎥⎢ ⎥⎢⎢ ⎥− ⎢ ⎥⎢⎢ ⎥⎢ ⎥⎢⎢ ⎥⎢ ⎥⎢⎢ ⎥⎢ ⎥⎢⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎢⎣ ⎦⎢⎢⎣ ⎦
ω 1 1
2 2
3 3
0 0
0 0
0 0
u u
u ² u
u u
⎥⎥⎥⎥⎛ ⎞ ⎛ ⎞⎥⎜ ⎟ ⎜ ⎟
=−⎥⎜ ⎟ ⎜ ⎟⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎥⎝ ⎠ ⎝ ⎠⎥⎥⎥⎥
ρω (1.18) (sym.)
qui peut se mettre sous la forme : 0 01 u uc²
Γ =ρ
uur uur (1.19)
appelée équation de Christoffel (Auld, 1973, Cazacliu, 1996, Sauzeat, 2003).
Résoudre l’équation de Christoffel permet de déterminer les ondes planes définies par l’équation 1.15 susceptibles d’exister dans le milieu décrit par la loi de comportement choisie (relation 1.12). Pour cela, il convient de trouver les valeurs propres et les vecteurs propres de la matrice Γ .
La relation 1.19 se réécrit :
29

Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
1
2 0
3
0 01 0 0 P u Pc²
0 0
Γ⎡ ⎤⎢ ⎥Γ =⎢ ⎥ρ⎢ ⎥Γ⎣ ⎦
0 uuur uru
(1.20)
avec P la matrice de passage de la base des vecteurs ( 1e
ur, 2eur
, 3eur
) vers la base des vecteurs
propres ( 1eΓ
uur, 2eΓ
uur, 3eΓ
uur) associés aux valeurs propres ( Γ1 , Γ2 , Γ3 ).
Pour chacun des trois vecteurs propres ieΓ
uur, il est possible de déterminer une célérité ci définie
par :
iic Γ=
ρ (1.21)
Les champs de déplacement solutions, capables d’exister dans le milieu, s’écrivent alors :
1 1 2 2 30 0 0l.OP l.OP l.OPu( P,t ) u exp i ( t ) e u exp i ( t ) e u exp i ( t ) e
c cΓ Γ ΓΓ Γ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤= ω − + ω − + ω −⎢ ⎥ ⎢ ⎥ ⎢
⎣ ⎦ ⎣ ⎦ ⎣ ⎦3c Γ⎥
ruuur ruuur ru ruur uur uur uur
(1.22)
Trois ondes planes polarisées dans les directions ( e 1Γ
uur, 2eΓ
uur, 3eΓ
uur) peuvent se propager aux
vitesses c1, c2, c3 dans la direction 1 1 2 2 3 3l l e l e l e= + +r ur ur u
. r
Les cas particulier des milieux isotrope et isotrope transverse sont présentés dans les paragraphes qui suivent.
1.2.2.1 Milieu élastique linéaire isotrope
Un milieu élastique linéaire isotrope est caractérisé par la loi de comportement ou
relation constitutive 1.6 (ou 1.7). Cette relation peut se réécrire sous la forme suivante en utilisant les notations de l’équation 1.7 :
11 11
22 22
22 33
23 23
13 13
12 12
1 0 0 01 2 1 2 1 2
1 0 0 01 2 1 2
1 0 0 02 21 22 22 0 0
2 02 22
E EE² ² ²
EE² ²
E²
GG
G
−⎡ ⎤− −⎢ ⎥− − − − − −⎡ ⎤ ⎡⎢ ⎥⎢ ⎥ ⎢−⎢ ⎥−⎢ ⎥ ⎢⎢ ⎥− − − −⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢−= ⎢ ⎥⎢ ⎥ ⎢⎢ ⎥− −⎢ ⎥ ⎢
⎤⎥⎥⎥⎥⎥⎥⎥⎢ ⎥ ⎢ ⎥⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
⎢ ⎥⎢ ⎥⎣ ⎦
ν ν νν ν ν ν ν νσ ε
ν νσ εν ν ν νσ ε
νσ εν νσ εσ ε
(1.23)
⎢⎢ (sym.)
où il est rappelé que E désigne le module d’Young, G le module de cisaillement et ν le coefficient de Poisson. Dans le cas d’une propagation verticale suivant 3l e=
r ur, l’équation de
Christoffel devient :
30
Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
1 1
2
3 3
0 0
0 0
0 0
0 01 0 0
10 01 2
u uGG u
c²u uE
²
⎡ ⎤⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟ ⎜ ⎟⎢ ⎥
=⎜ ⎟ ⎜⎢ ⎥⎜ ⎟ ⎜ ⎟⎢ ⎥ ⎜ ⎟ ⎜ ⎟− ⎝ ⎠ ⎝ ⎠⎢ ⎥
− −⎣ ⎦
ρν
ν ν
2u ⎟ (1.24)
Les champs de déplacement solutions s’écrivent alors :
1 2 3
33 0 1 0 2 0
s p
x xu( x ,t ) ( u e u e )exp i ( t ) u exp i ( t ) ec c
33
⎡ ⎤⎡ ⎤= + ω − + ω −⎢ ⎥⎢ ⎥
⎢ ⎥⎣ ⎦ ⎣ ⎦
r ur ur ur (1.25)
ou alors dans un repère cylindrique (O, re
ur, eθ
ur, zeur
) (l’expression de la loi de comportement demeurant inchangée) :
0 0 0r zr zs p
z zu( z,t ) ( u e u e )exp i ( t ) u exp i ( t ) ec cθ θ
⎡ ⎤⎡ ⎤= + ω − + ω −⎢ ⎥⎢ ⎥
⎢ ⎥⎣ ⎦ ⎣ ⎦
r ur ur ur (1.26)
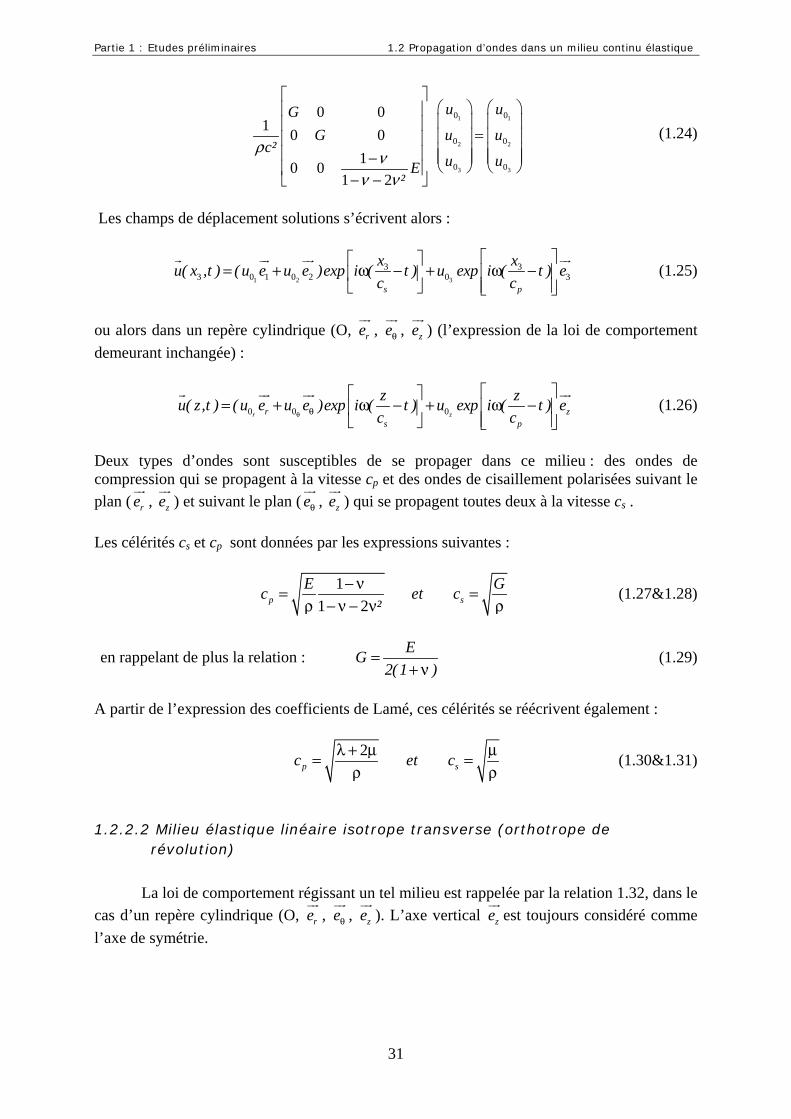
Deux types d’ondes sont susceptibles de se propager dans ce milieu : des ondes de compression qui se propagent à la vitesse cp et des ondes de cisaillement polarisées suivant le plan ( re
ur, zeur
) et suivant le plan ( eθ
ur, zeur
) qui se propagent toutes deux à la vitesse cs . Les célérités cs et cp sont données par les expressions suivantes :
11 2p
Ec²
− ν=ρ − ν − ν
et sGc =ρ
(1.27&1.28)
en rappelant de plus la relation : EG2(1 )
=+ ν
(1.29)
A partir de l’expression des coefficients de Lamé, ces célérités se réécrivent également :
2pc λ + µ=
ρ et sc µ=
ρ (1.30&1.31)
1.2.2.2 Milieu élastique linéaire isotrope transverse (orthotrope de révolution)
La loi de comportement régissant un tel milieu est rappelée par la relation 1.32, dans le
cas d’un repère cylindrique (O, reur
, eθ
ur, zeur
). L’axe vertical zeur
est toujours considéré comme l’axe de symétrie.
31
Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
1 0 0 0
1 0 0 0
1 0 0 0
2 21 0 022 2
12 202
1
rr rz
r r z
rz
rr rrr z
zz zzz
z z
zrz rz
r r
z
rr
r
E E E
E E
E
G
G
E
⎡ ⎤− −⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎡ ⎤ ⎡⎢ ⎥⎢ ⎥ ⎢⎢ ⎥ ⎢⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢=⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥ ⎢⎣ ⎦ ⎣⎢ ⎥⎢ ⎥⎢ ⎥+⎢ ⎥⎢ ⎥⎣ ⎦
θθ θθ
θ θ
θ
θ θ
θ
ν ν
νε σε σε σ
ε σε σε σ
ν
⎤⎥
⎢ ⎥ ⎥⎢ ⎥ ⎥
⎥⎥⎥⎥⎥⎥⎦
(1.32)
(sym.)
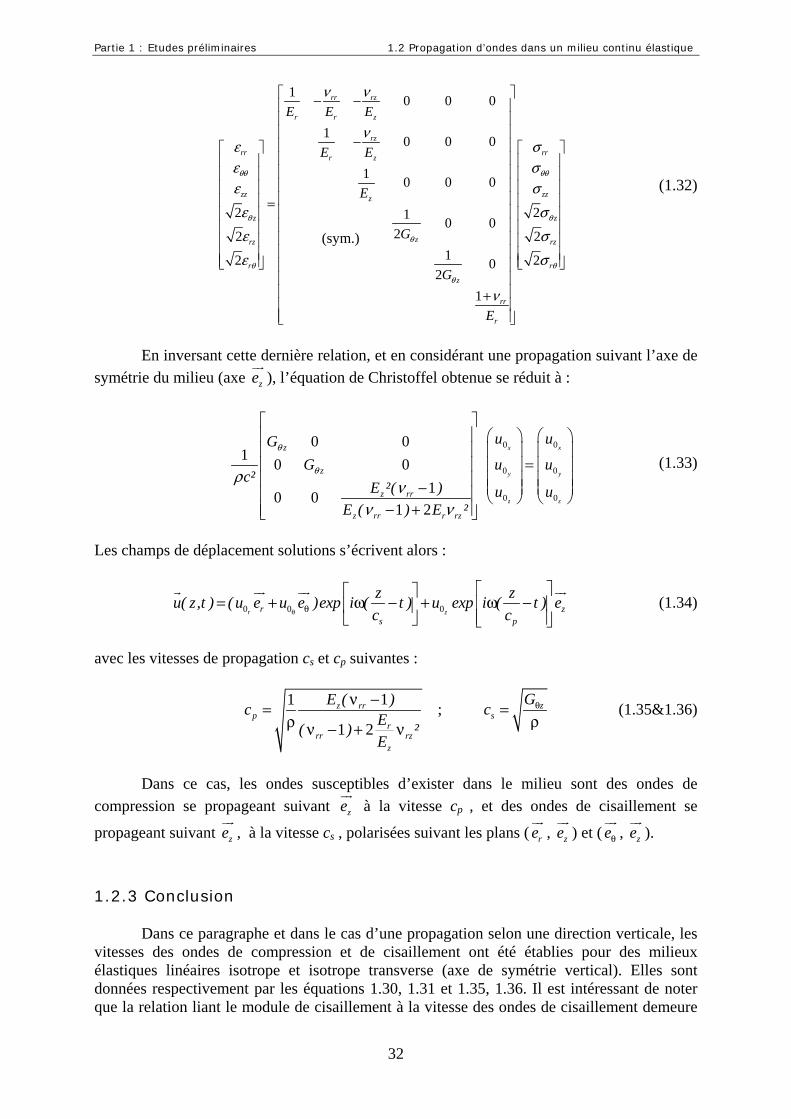
En inversant cette dernière relation, et en considérant une propagation suivant l’axe de
symétrie du milieu (axe zeur
), l’équation de Christoffel obtenue se réduit à :
0 0
0 0
0 0
0 01 0 0
10 01 2
x x
y
z z
z
z
z rr
z rr r rz
u uGG
c²E ²( ) u u
E ( ) E ²
⎡ ⎤⎢ ⎥ ⎛ ⎞ ⎛ ⎞
⎜ ⎟ ⎜ ⎟⎢ ⎥=⎜ ⎟ ⎜ ⎟⎢ ⎥
⎜ ⎟ ⎜ ⎟⎢ ⎥− ⎜ ⎟ ⎜ ⎟⎢ ⎥ ⎝ ⎠ ⎝ ⎠− +⎢ ⎥⎣ ⎦
θ
θρν
ν ν
yu u (1.33)
Les champs de déplacement solutions s’écrivent alors :
0 0 0r zr zs p
zu( z,t ) ( u e u e )exp i ( t ) u exp i ( t ) ec cθ θ
z⎡ ⎤⎡ ⎤= + ω − + ω −⎢ ⎥⎢ ⎥
⎢ ⎥⎣ ⎦ ⎣ ⎦
r ur ur ur (1.34)
avec les vitesses de propagation cs et cp suivantes :
11
1 2z rr
pr
rr rzz
E ( )c E( )E
ν −=ρ ²ν − + ν
; zs
Gc θ=ρ
(1.35&1.36)
Dans ce cas, les ondes susceptibles d’exister dans le milieu sont des ondes de
compression se propageant suivant ez
ur à la vitesse cp , et des ondes de cisaillement se
propageant suivant ez
ur, à la vitesse cs , polarisées suivant les plans ( re
ur, ez
ur) et ( eθ
ur, zeur
).
1.2.3 Conclusion Dans ce paragraphe et dans le cas d’une propagation selon une direction verticale, les vitesses des ondes de compression et de cisaillement ont été établies pour des milieux élastiques linéaires isotrope et isotrope transverse (axe de symétrie vertical). Elles sont données respectivement par les équations 1.30, 1.31 et 1.35, 1.36. Il est intéressant de noter que la relation liant le module de cisaillement à la vitesse des ondes de cisaillement demeure
32
Partie 1 : Etudes préliminaires 1.2 Propagation d’ondes dans un milieu continu élastique
inchangée quelque soit le milieu considéré (relations 1.31 et 1.36). De plus, dans le cas d’un milieu isotrope, le comportement élastique linéaire peut être caractérisé à partir de deux seuls paramètres. La donnée des vitesses des ondes de compression et de cisaillement suffisent alors à caractériser le comportement du sol. En revanche pour un milieu isotrope transverse, 5 paramètres sont requis. La seule donnée des vitesses ne permet pas ainsi de caractériser complètement son comportement et des hypothèses sont nécessaires sur l’évolution des 3 paramètres restants.
Tout au long de notre étude, des hypothèses de comportement élastique linéaire isotrope et élastique linéaire isotrope transverse seront systématiquement utilisées et comparées. Elles permettent d’évaluer les paramètres de comportement ({E ; G ; ν} ou bien {Er ; Ez ; νrr ; νrz ; Gθz}) des matériaux testés pour les essais de type propagation d’ondes, en laboratoire mais aussi in situ avec des essais de type « cross, down ou up-hole ».
33
34

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
1.3 Propagation d’ondes dans un milieu poroélastique
saturé
Dans ce paragraphe, le sol saturé est considéré comme un milieu continu mais biphasique (phase solide + phase liquide), les deux phases interagissant entre elles. La mécanique des milieux poreux permet de relier les déformations aux contraintes en tenant compte de l’interaction entre les différentes phases, les mouvements de chacune des phases ayant une répercussion sur l’autre. Sont présentées les équations de propagation d’ondes dans un milieu poreux (supposé élastique) telles que développées par Ishihara (1968, 1970) en se fondant sur les relations constitutives établies par Biot (1955, 1956).
1.3.1 Poroélasticité
Le cheminement suivi par Biot pour aboutir aux relations constitutives liant les contraintes subies par le squelette granulaire avec la pression locale subie par le fluide, est repris dans ce premier paragraphe. Les équations sont établies dans le cadre de chargements statiques.
1.3.1.1 Poroélasticité isotrope
A partir d’un élément cubique infiniment petit et représentatif du milieu poreux (supposé isotrope), Biot (1955, 1956) répartit la contraintei) totale agissant sur les facettes de cet élément en deux parties. La première partie représente les composantes des forces agissant sur la partie solide de chaque face du cube. Elle s’écrit :
s s sx xy xz
s s s sxy y yzs s sxz yz z
σ τ τσ τ σ τ
τ τ σ
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
(1.37)
où sσ est communément appelé dans la suite le tenseur des contraintes de Biot. Les forces agissant sur la partie fluide de chaque face du cube sont représentées par :
0 000 0
ss
s0
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(1.38)
i) la convention de signe adoptée ici est celle de la mécanique des sols : les contraintes sont positives dans le sens de la compression.
35

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
Le scalaire s est alors proportionnel à la pression p du fluide qui s’applique sur la surface élémentaire du cube :
.s n p= (1.39)
avec n la fraction de la phase fluide sur chaque facette de l’élément. Le matériau poreux est supposé statiquement isotrope : n s’identifie à la porosité. Il doit être garder à l’esprit que le tenseur des contraintes de Biot représente les forces totales appliquées sur les grains solides, c’est-à-dire la somme des forces intergranulaires et de la force du fluide qui s’applique sur les grains solides. La pression s est la pression qui s’applique sur la phase fluide et n’est pas égale à la pression interstitielle, u = p, habituellement considérée (relation 1.39). La formulation de Biot s’écrit ainsi :
. .s ss I n p Iσ σ σ= + = + . (1.40) où σ est le tenseur des contraintes totales et I le tenseur unité d’ordre 2. Elle diffère de celle habituellement considérée en mécanique des sols à partir de la proposition de Terzaghi ( ' . ' .u I p Iσ σ σ= + = + )i). Le tenseur des déformations du squelette granulaire est dénoté par (Biot, 1956) :
1 12 2
12 21 12 2
1
xx xy xz
xy yy yz
xz yz zz
e
e e
e
γ γ
γ γ
γ γ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(1.41)
avec iii
i
uex
∂=∂
et 2 jiij ij
j i
uuex x
γ∂∂= = + ≠
∂ ∂( )i j , ux, uy, uz étant les composantes du vecteur
déplacement de la phase solide, considéré uniforme et moyenné sur le cube élémentaire. L’hypothèse des petites transformations est ainsi implicitement adoptée. D’une façon iden-tique, le déplacement moyen du fluide est considéré sur le même volume infinitésimal, de composantes Ux, Uy, Uz. La déformation dans le fluide est définie par sa déformation volumique :
yx zkk
UU Ux y z
ε ε∂∂ ∂= = + +
∂ ∂ ∂ (1.42)
Biot (1956) établit ensuite les équations constitutives reliant contraintes et
déformations en négligeant, dans un premier temps, les dissipations d’origine visqueuse dans l’interaction fluide/squelette. L’échantillon de matériau poreux est ainsi un système conservatif sans dissipation d’énergie, et l’équilibre correspond à un minimum d’énergie potentielle. i) le lien entre la contrainte effective et la contrainte de Biot peut être obtenu en égalisant les contraintes totales σ des formulations de Biot et de Terzaghi ⇒ σ’ = σs – (1-n).s/n = σs – (1-n).p
36

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
En première approximation, cette énergie potentielle peut être définie comme une
forme quadratique positive et les sept composantes du tenseur des contraintes Σ sont des fonctions linéaires des sept composantes du tenseur des déformations E , avec :
000
0 0 0
s s sx xy xz
s s sxy y yzs s sxz yz y
s
σ τ ττ σ ττ τ σ
⎡ ⎤⎢ ⎥⎢ ⎥Σ =⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
et
1 1 02 21 1 02 21 1 02 2
0 0 0
x xy xz
xy y yz
xz yz z
e
eE
e
γ γ
γ γ
γ γ
ε
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(1.43&1.44)
L’énergie potentielle de déformation par unité de volume s’écrit :
2 : . . . . . . .s s s s s sij ij x x y y z z xy xy xz xz yz yzW E E sσ ε σ ε σ ε τ .γ τ γ τ γ ε= Σ = Σ = + + + + + + (1.45)
Et les relations contrainte-déformation s’expriment alors sous la forme :
sx
x
We
σ ∂=∂
; sy
y
We
σ ∂=∂
; sz
z
We
σ ∂=∂
; sxy
xy
Wτγ
∂=∂
; sxz
xz
Wτγ
∂=∂
; syz
yz
Wτγ
∂=∂
; Wsε
∂=∂
(1.46)
Les sept composantes des contraintes et les sept composantes des déformations sont reliées par une forme linéaire symétrique (relation 1.45). Elles forment une relation matricielle, symétrique de 28 composants différents dans le cas le plus général. Du fait de l’hypothèse d’isotropie, les directions des contraintes et des déformations principales coïncident, et dans ce repère, il est alors possible d’écrire :
( )( )( )
( )
sI I II IIIsII II I IIIsIII III I II
I II III
Be C e e QBe C e e QBe C e e Q
s Q e e e R
σ εσσ ε
ε
⎧ = + + +⎪ = + + +⎪⎨ = + + +⎪⎪ = + + +⎩
ε (1.47)
ou sous forme matricielle
sII
sIIII
sIIIIII
B C C Q eC B C Q eC C B Q eQ Q Q Rs
σσσ
ε
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦
(1.48)
L’existence de l’énergie potentielle impose la symétrie de la matrice reliant contraintes et déformations. En posant :
2B CN −= et (1.49) A C=
il est possible de réécrire les relations 1.47 et 1.48 :
37
Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
222
sI IsII IIsIII III
Ne Ae QNe Ae QNe Ae Q
s Qe R
σ εσσ ε
ε
⎧ = + +⎪ = + +⎪⎨
= + +⎪⎪ = +⎩
ε
I
(1.50)
avec , e et ε qui sont des invariants tensoriels, ce qui permet alors d’écrire,
dans un repère orthonormé (O, I II IIe e e e= + +
xeur
, yeuur
, zeur
) quelconque :
222
sx xsy ysz z
sxy xysxz xzsyz yz
Ne Ae QNe Ae QNe Ae Q
NNN
s Qe R
σ εσ εσ ε
τ γτ γτ γ
ε
⎧ = + +⎪ = + +⎪⎪ = + +⎪
=⎨⎪ =⎪⎪ =⎪ = +⎩
(1.51)
La relation 1.51 exprime la loi de comportement d’un milieu poreux élastique. Il est
possible de reconnaître en N le coefficient élastique de Lamé, µ (ou le module de cisaillement cf. §1.2). Le paramètre R relie la pression appliquée au fluide à sa déformation volumique. Il a la dimension d’une pression et est vraisemblablement lié, entre autres, au module de compressibilité du fluide. Q représente un facteur de couplage entre la déformation de la phase solide et de la phase liquide.
Pour relier ces paramètres à des constantes physiques plus traditionnelles et plus
significatives telles que les compressibilités des différentes phases, Biot & Willis (1957), Nagumo (1965), ou encore Ishihara (1968) imaginent des essais de compression isotrope drainés (à pression du fluide nulle ou « jacked test ») ou de compression à contrainte effective nulle (« unjacked test »).
L’essai de compression isotrope drainé consiste à appliquer une pression p’ isotrope à
un échantillon de sol poreux saturé en autorisant le drainage de l’échantillon. Durant cet essai, le module de compressibilité du squelette granulaire (grains+pores) Cb est défini par :
'beCp
= (1.52)
Les conditions spécifiques de cet essai amènent :
's s sx y z pσ σ σ= = = , et 0s = . '
3b
x y zC pe e e= = = (1.53&1.54&1.55)
En injectant ces dernières relations dans les équations 1.51, il vient alors que :
1 2 ²3b
QN AC R
= + − (1.56)
38

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
La relation 1.56 comparée à la relation 1.9 indique que la quantité A-Q²/R correspond au coefficient de Lamé λ du matériau poreux pour des conditions drainées.
Un essai de compression à contrainte effective nulle consiste à immerger l’échantillon de matériau poreux dans un fluide auquel est appliqué une pression p’. Les conditions de cet essai sont telles que la pression du fluide interstitiel est identique à la pression de confinement p’. Dans ces conditions, la compressibilité des grains solides, Cs , est définie par :
'seCp
= (1.57)
Et on a :
(1 ) 's s sx y z n pσ σ σ= = = − , et 's np= . '
3s
x y zC pe e e= = = (1.58&1.59&1.60)
Si bien qu’à partir des relations constitutives 1.51, il vient :
2 ²1 ( ) ( )3s
Q R Qn C N AR R+− = + − (1.61)
Biot&Willis (1957) définissent un coefficient de contenu fluide ζ donné par :
2( ) 3
2 ²' ( )3
N A Qn eQp N A RR
ες+ −−= =
+ − (1.62)
et relié aux compressibilités des grains et du fluide Cl , en considérant que la déformation des pores est égale à celle des grains solides pour cet essai, c’est-à-dire que la porosité du matériau poreux demeure constante :
1 1(l s
nC C
ς = − ) (1.63)
Les équations précédentes (1.56, 1.61, 1.62 et 1.63) permettent ainsi d’établir le lien entre les coefficients élastiques des équations de Biot et les compressibilités du squelette granulaire, des grains et du fluide (Biot&Willis, 1957) :
39

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
[ ]
. ( ) ². (1 2 ).( )23 . .( ) . ²
. . (1 ). .( ) . ²
².. .( ) . ²
b l s b b s
b l s b s s
b b s
b l s b s s
b
b l s b s s
Nn C C C n C n C CA N
n C C C C C Cn C n C C
Qn C C C C C C
n CRn C C C C C C
µ=⎧⎪ − + + − −⎪ + =
− + −⎪⎪ − −⎨ =⎪ − + −⎪⎪
=⎪ − + −⎩
(1.64)
Pour fixer les idées, des valeurs des compressibilités du squelette et des grains sont donnée à titre indicatif pour différents types de sols et de roches dans le tableau 1.1 (Ishihara, 1970).
Sol Cb (10-6.kg-1.cm²) Cs (10-6.kg-1.cm²) Cs / CbGrès 5,8 2,7 0,46 Marbre de Vermont 17,5 1,4 0,08 Béton (approx.) 20 2,5 0,12 Sable dense 1800 2,7 0,0015 Sable lâche 9000 2,7 0,0003 Argile de Londres (surcons.) 7500 2,0 0,00025 Argile de Gosport (norm. cons.) 60000 2,0 0,00003
Tableau 1.1 : Compressibilités du squelette granulaire(Cb) et des grains(Cs) de différents géomatériaux (Ishihara, 1970)
Sous l’hypothèse d’un matériau poreux élastique, il est également intéressant de noter le lien entre contrainte effective et les paramètres de la relation 1.64. La loi de comportement 1.51 s’écrit en contraintes totales :
2 ( ) ( )
2 ( ) (
2 ( ) ( )
sx x x
sy y y
sz z z
sxy xy xy
sxz xz xz
syz yz yz
s Ne A Q e Q R
s Ne A Q e Q R
s Ne A Q e Q R
N
N
N
s Qe R
σ σ εσ σ
σ σ ετ τ γ
τ τ γτ τ γ
ε
⎧ = + = + + + +⎪
= + = + + + +⎪⎪ = + = + + + +⎪⎪ = =⎨⎪ = =⎪⎪ = =⎪⎪ = +⎩
)ε
(1.65)
qui peut se réécrire en faisant disparaître la déformation ε du fluide à partir de la dernière relation du système 1.65 :
40

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
'
'
'
. 2 . . (1 ). 2 . .
. 2 . . (1 ). 2 . .
. 2 . . (1 ). 2 . .
. .
. .
. .
. . . ( )
x x x x
y x y x
z x z x
xy xy xy xy
xz xz xz xz
yz yz yz yz
p e e p e e
p e e p e e
p e e p e
s n p Q e R p n
σ
e
β µ λ σ β µ λσ β µ λ σ β µ λ
σ β µ λ σ β µ λτ µ γ τ µ γ
τ µ γ τ µ γτ µ γ τ µ γ
ε β
⎧ + = + − − = +⎪
+ = + − − = +⎪⎪ + = + − − = +⎪⎪ = ⇒ =⎨⎪ = =⎪⎪ = =⎪⎪ = = + = −⎩ . .eξ ξ ε
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪ +⎩
(1.66)
où . 1 s
b
CQ RnR C
β += = − , ² 1 23b
QAR C
λ µ= − = − , et 1² . ( ).l s
Rn n C n C
ξα
= =+ −
.
L’expression 1.66 de la loi de comportement a l’avantage de fournir des relations nettement plus simples que l’expression 1.51 et d’illustrer l’influence de la compressibilité des différentes phases. Il peut être noté que compte tenu des valeurs de Cs/Cb reportées dans le tableau 1.1, le paramètre β est très proche de 1 pour les sables et les argiles. Une loi élastique classique peut donc être postulée entre les contraintes effectives et les déformations du squelette granulaire pour ces matériaux. La déformation volumique du squelette granulaire reste liée à la déformation volumique du fluide par la dernière relation du système 1.66, c’est-à-dire par les paramètres β, n et ξ.
1.3.1.2 Poroélasticité isotrope transverse
Dans le cas d’une isotropie transverse (ou orthotropie de révolution, l’axe de révolution étant vertical, cf. §1.2), les relations constitutives entre contraintes et déformations du squelette granulaire et du fluide saturant sont déterminées par Biot&Willis (1957). Elles s’écrivent :
sx x y zsy x y zsz x y z
sxy xysxz xzsyz yz
x y z
Pe Ae Fe MAe Pe Fe MFe Fe Ce Q
LNN
s Me Me Qe R
σ εσ εσ ε
τ γτ γτ γ
ε
⎧ = + + +⎪ = + + +⎪⎪ = + + +⎪⎪ =⎨⎪ =⎪
=⎪⎪ = + + +⎪⎩
(1.67)
avec ce qui fournit 8 coefficients indépendants. En inversant la relation 1.67, il vient :
2P A L= +
41

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
. . .. . .. . .
...
. . . .
s s sx x y z
s s sy x y z
s s sz x y z
sxy xy
sxz xz
syz yz
x y z
e a d g h se d a g h se g g b m s
ftt
h e h e m e k s
σ σ σσ σ σσ σ σ
γ τγ τγ τ
ε
⎧ = + + +⎪ = + + +⎪⎪ = + + +⎪⎪ =⎨⎪ =⎪
=⎪⎪ = + + +⎪⎩
.
..
ou encore
0 0 00 0 00 0 0
0 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
sx x
sy y
sz z
sxy xy
sxz xz
syz yz
e a d g he d a g he g g b m
ft
tk s
σσσ
γ τγ τγ τε
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥= ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(1.68)
avec 1 fL
= et 1 tN
= . Sous des conditions constantes de pression interstitielle, il est ainsi
possible de mesurer deux modules d’Young :
1
2
1
1
yxs sx y
zsz
ee aE
e bE
σ σ
σ
∂⎧ ∂= = =⎪ ∂ ∂⎪⎨
∂⎪ = =⎪ ∂⎩
(1.69)
mais également 3 coefficients de Poisson :
1 1
2 2
3 1
ysx
xsx
xsz
zsz
zsx
xsx
ed E dae
eg E gbe
eg E gae
σν
σ
σν
σ
σν
σ
⎧ ∂⎛ ⎞⎪ ⎜ ⎟∂⎝ ⎠⎪ − = = =⎪ ⎛ ⎞∂⎪ ⎜ ⎟∂⎝ ⎠⎪⎪ ⎛ ⎞∂⎪ ⎜ ⎟⎪ ∂⎪ ⎝ ⎠− = = =⎨
⎛ ⎞∂⎪ ⎜ ⎟⎪ ∂⎝ ⎠⎪⎛ ⎞⎪ ∂⎜ ⎟⎪ ∂⎝ ⎠⎪ − = = =
⎪ ⎛ ⎞∂⎪ ⎜ ⎟∂⎪ ⎝ ⎠⎩
(1.70)
Quatre seulement de ces paramètres parmi les deux modules d’Young et les trois coefficients de Poisson, sont indépendants puisqu’existe la relation (symétrie de la matrice 1.68) :
32
2 1E Eνν = (1.71)
Deux modules de cisaillement peuvent être directement mesurés dont seulement un représente une mesure indépendante (compte tenu de la relation initiale ) : 2P A L= +
42

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
1
2
1
1
xysxy
yzxzs sxz yz
f
t
γµ τ
γγµ τ τ
∂⎧= =⎪ ∂⎪
⎨ ∂∂⎪ = = =⎪ ∂ ∂⎩
(1.72)
Dans le cas d’un essai de compression à contrainte effective nulle, les relations 1.58 à 1.60 sont établies, ce qui aboutit à :
[ ][[ ]
1
1
2
' ( 1)( ) . '' ( 1)( ) . '' ( 1)( ) . '
x
y
z
e p n a d g n h pe p n a d g n h pe p n g g b n m p
δδδ
⎧ = − + + − = −⎪ = − + + − = −⎨⎪ = − + + − = −⎩
] (1.73)
où la définition de δ1 et δ2 laisse présager de mesures difficilement applicables dans la pratique. Selon, Biot&Willis (1957), ces coefficients représentent, en effet, les changements, respectivement, dans les premiers axes principaux (égaux) et les changements dans le troisième axe principal d’une ellipsoïde de révolution formée par une sphère élémentaire de matériau sous une pression unitaire. Enfin la dernière mesure porte sur le coefficient de contenu fluide (cf. relation 1.62) aboutissant à la détermination de k à travers la relation 1.74.
[ ] 1 2( 1)( ) . ' (2 'n h h m n k p pn
)ζε δ= − + + − = − − +δ (1.74)
La matrice de la relation 1.68 reliant déformations et contraintes est ainsi donnée par les mesures suivantes :
3 1 31 1
1 1 1 1
1 31 2 1
1 1 2 1
3 2 2
1 2 2 2
1
2
22
1 31 2 2
2 1
11 10 0 0
11 10 0 0
1 21 10 0 0
10 0 0 0 0 0
10 0 0 0 0 0
10 0 0 0 0 0
2(1 )2 1 21 2 10 0 0 0 0 0
nE E E n n E
nE E E n n E
nE E E n n E
n nn n n n E E
ν νν δ
ν νν ν δ
ν ν δ ν
µ
µ
µ
ν νδ δ νγ
− −− −⎡ −⎢⎢
− −⎢− − −−⎢⎢⎢− − −−−⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎛ ⎞− −+ −− −⎛ ⎞− + +⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎦
2
ν−
(1.75)
Enfin, il est possible de faire apparaître de manière similaire au cas de la poroélasticité isotrope la contrainte effective dans la relation 1.67.
43

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
1.3.2 Propagations d’ondes dans un milieu poroélastique isotrope Dans ce paragraphe, les équations présentées décrivent la propagation d’ondes planes dans un milieu poreux élastique, saturé par un fluide compressible supposé non visqueux. le milieu est considéré isotrope à l’échelle du cube élémentaire et les pores sont supposés petits par rapport à la taille du cube. La longueur d’onde est également supposée « très supérieure » à la taille du volume élémentaire et à fortiori à la taille des pores. A titre d’exemple, pour un sable dont les diamètres de grain est de 1mm (sable grossier), une vitesse d’onde P, de compression, de 2000 m.s-1, et une fréquence de 200kHz, la longueur d’onde est de 10mm. La taille d’un côté du volume élémentaire est au minimum de 2 grains soit 2mm. La longueur d’onde est ainsi seulement 5 fois supérieure à la taille du cube. Par contre, dès que le diamètre des grains diminue de moitié (0,5mm, la longueur d’onde est alors 10 fois supérieure dans les mêmes conditions) ou lorsque des plus faibles fréquences sont considérées, l’hypothèse apparaît pleinement justifiée. Dans le cadre de ces hypothèses, l’approche originelle de la propagation d’ondes en milieu poreux a été établie par Biot (1956, 1962). Ishihara (1968, 1970) développe ensuite une approche simplifiéei) appliquée aux sols qui est exposée ci-dessous.
i) Ishihara (1968, 1970) néglige par rapport à Biot (1956,1962) le couplage inertiel entre la phase solide et la phase liquide. Biot (1956,1962) établit en effet les équations de propagation d’ondes à partir des équations de mouvements établies elles-mêmes à partir du théorème de Lagrange (dérivé de l’expression de l’énergie cinétique). Il en résulte une masse couplée entre solide et liquide, c’est-à-dire qu’un déplacement du fluide entraîne une certaine masse de solide et inversement. Cette masse couplée dépend de la géométrie des pores, c’est-à-dire de la tortuosité. Gajo (1996), par exemple, montre que ce couplage reste négligeable dans le cas des argiles. Dans le cas des sables, une différence de 1 à 2% est obtenue sur la valeur du module de cisaillement à partir de la vitesse des ondes de cisaillement (Kuwano, 2000) Les équations de mouvement s’écrivent en négligeant les forces volumiques, ou après application au système antérieurement en équilibre (Ishihara, 1965, 1968, 1970) :
2
g 2
2
w
s
2
u Udiv( ) b
U
t
U ugr
t t
t tad( s ) b
ρ σ
ρ
∂ ∂= −∂ ∂
∂ ∂=
⎧ ⎛ ⎞+⎪ ⎜ ⎟⎜ ⎟⎪⎪ ⎝
⎨⎛ ⎞⎪ − −⎜ ⎟⎪ ⎜ ⎟⎪ ⎝ ⎠⎩ ∂ ∂
r uruur
ur ur ruuuur
u
t
∂∂
∂
⎠
∂
r
(1.76)
avec g s(1 n )ρ ρ= − la masse volumique du squelette granulaire ( sρ est la masse volumique des grains), w n fρ ρ= , la masse volumique de la phase fluide ou liquide ( fρ est la masse
volumique du fluide ou de l’eau) et wn. .gbk
ρ= (k est la perméabilité du sol en m.s-1).
Pour traduire l’écoulement du fluide dans le milieu poreux, l’auteur considère la loi de Darcy
(associée à la vitesse relative du fluide par rapport au solide, terme U ubt t
∂ ∂−∂ ∂
⎡ ⎤⎢ ⎥⎢ ⎥⎣ ⎦
r ru). Quand le
squelette granulaire est soumis à une déformation, le fluide interstitiel subit une surpression et s’écoule vers les régions de plus basse pression. L’excès de pression dû à l’écoulement est
44

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
traduit ici par w un ggrad( s )k t t
Uρ ∂ ∂= −∂
⎛ ⎞⎜ ⎟⎝ ⎠∂⎜
r uruuuur⎟ (loi connue également sous le nom de loi semi-
empirique de Darcy-Gersevanov, Toorman, 1996). En combinant les relations constitutives reliant contraintes et déformations pour les deux phases, c’est-à-dire la loi de comportement 1.51, et les équations du mouvement 1.76, il vient :
2
g 2
2
2
2
w
u U. u grad .div( u ) Q.grad .div(U ) b3
U UQ.grad.div(U ) R.grad.div( u )
t t
t tb
tρ
ρ
µµ α⎧ ⎛ ⎞⎛ ⎞∇ + + + +⎪ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠⎪⎪ ⎝
∂ ∂= −∂ ∂
∂ ∂⎨
∂= −⎛ ⎞⎪ + − ⎜ ⎟⎪ ∂ ∂⎜ ⎟⎪ ⎝ ⎠⎩
r ur r ur
ur ur rur r
u
ut
⎠
∂∂
∂
r r
(1.77)
où α = A + 2/3.N = A + 2/3.µ. et l’opérateur laplacien. 2∇
Les équations de propagation d’ondes de compression et de cisaillement peuvent ensuite être obtenues en appliquant respectivement les opérateurs divergence et rotationnel au système 1.77.
1.3.2.1 Ondes de compression
L’application de l’opérateur divergence associée au changement de variable eς ε= −
fournit le système suivant (1.78, Ishihara, 1968).
( )
2 22
g 2
2 2
w w2
22
2
4Q . e Q. b.3
R . e R. b.
. 0t t
. 0t t
α
α
ρ ς
ρ ς
µ
ρ
∂ ∂⎡ ⎤− =⎢ ⎥∂ ∂⎣ ⎦
∂
⎧⎡ ⎤⎛ ⎞+ + ∇ + ∇ −⎪ ⎜ ⎟
∂ ∂− −∂ ∂
⎢ ⎥⎝ ⎠⎪⎣ ⎦⎨⎡ ⎤ ⎡⎪ + ∇ + + ∇ +⎢ ⎥ ⎢⎪⎣ ⎦ ⎣⎩ t
=∂⎤⎥⎦
(1.78)
En éliminant la variable ς , le système 1.78 se réduit à une équation différentielle du quatrième ordre en e :
( ) 2 4 3g w g w g w
2 44 2 2
2 2 2 3 2
. 4 3 4 3 e 04 3 t 4 3 t 4 3 t
R 2.Q Rb bQ .R .R Q .R .R Q .R .R Q .R 4 3 t.R
µ α µα µ α
ρ ρ α ρ ρµ α µ α µ
ρ ρ+ +⎡ ⎤∂ ∂ ∂− + −⎢ ⎥∂ ∂ ∂+ + + +∇ + ∇ ∇− − − − − ⎦−⎣ − −
∂ =∂
(1.79) Il peut être noté que la même équation pour la variable ς est obtenue en éliminant cette fois la variable e au lieu de ς dans le système 1.78. L’équation différentielle 1.79 est résolue, dans le cas monodimensionnel c’est-à-dire en considérant une propagation uniquement suivant la direction x, en utilisant des variables adimensionnelles t* et x* :
45

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
* ttt
= ; * xxx
= si bien que
2 2
2* 2 *2
22 4
2 4*2 *4
1 1 ;
1 1 ;
t t t tt t
x xx x
⎧ ∂ ∂ ∂ ∂= =⎪∂ ∂ ∂ ∂⎪⎨
∂ ∂⎪∇ = ∇ =⎪ ∂ ∂⎩
4 (1.80&1.81)
La solution de l’équation différentielle est supposée de la forme suivante par Ishihara (1968) :
( )exp * *ee A i t lxω⎡ ⎤= +⎣ ⎦ (1.82) Enfin , en posant :
( )( )
2 224 3
. 4. .
1 12.
3
. 4 34 3
g w
g w
d
c
R R Qx Vt
tb
RQ R
Rα µ
µ
µα µ
ρ ρ α
ρ ρ α
⎧⎛ ⎞ + −⎪ = =⎜ ⎟ +⎪⎝ +⎠⎨+⎪
= =+
⎪ + + +⎩ ω
(1.83)
où les deux constantes introduites et ont bien respectivement les dimensions d’une vitesse et d’une fréquence. En injectant la forme de la solution 1.82 dans l’équation différentielle du quatrième ordre 1.79, il vient :
dV cω
4 2
1 21l i l iθ θω ω ω ω⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞− + + + =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠0 (1.84)
où 2
1 2d
n
VV
θ = , 2
2 2d
l
VV
θ = (1.85&1.86)
avec
2
2 2.
4 3
4 3
nw g
lg w
RV
Q RV
µρ ρα µ
α
ρ ρ
= +
+ + +=
+⎧⎪⎨
+
⎪
⎪⎪⎩
(1.87)
Pour illustrer les ordres de grandeurs des différents termes mis en jeu dans l’équation 1.84, leurs valeurs sont reportées dans le tableau 1.2 pour des sables lâches et denses et pour des argiles normalement et surconsolidés. Les constantes et restent très faibles devant 1 pour ces deux géomatériaux.
1θ 2θ
Sable
dense Sable lâche
Argile surcons.
Argile norm. cons.
Compressibilité (kg-1.cm²) Cb 1800.10-6 9000.10-6 7500.10-6 60000.10-6
Cs 2,7.10-6 2,7.10-6 2,7.10-6 2,7.10-6
Cl 48.10-6 48.10-6 48.10-6 48.10-6
Porosité n (valeur supposée) 0,3 0,5 0,3 0,5 α (kg.cm-2) 3,1.104 1,0.104 3,1.104 1,0.104
46

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
Q (kg.cm-2) 1,3.104 1,0.104 1,3.104 1,0.104
R (kg.cm-2) 0,55.104 1,0.104 0,55.104 1,0.104
µ (kg.cm-2) 2500 1000 300 200 Perméabilité k (valeur supposée, cm.s-1) 10-2 10-1 10-6 10-5
b (s.kg.cm-4) 9,0.10-3 25.10-4 1,6 0,16 ωc (s-1) 5650 5630 54,5.106 588.106
Vd (m.s-1) 340 285 125 88 Vl (m.s-1) 1800 1600 1780 1520 Vn (m.s-1) 1950 1700 1920 1690 θ1=Vd
2/Vn2 3,0.10-2 2,8.10-2 0,42.10-2 0,068.10-2
θ2=Vd2/Vl
2 3,5.10-2 3,4.10-2 0,49.10-2 0,34.10-2
Tableau 1.2 : Vitesses Vd, Vl, Vn et fréquence caractéristique ωc déterminées à partir de valeurs de compressibilités, porosité et de perméabilité « typiques » des sables et argiles (Ishihara, 1968)
Les deux solutions de l’équation du second degré 1.84 en ( )2/l ω s’écrivent :
2 2
1 21 1 1 42
l i i θ θω ω ω
⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎢= + ± + − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎣ ⎦
iω
⎥ (1.88)
qui, peuvent alors être simplifiées, compte tenu que les constantes et sont très petites devant 1 :
1θ 2θ
2 2
2 1 2 12 2
12
2
1 1
11
l i
l i
θ θ ω θ θ ωω ω ω
ω ω
⎧⎛ ⎞ + −⎪ = +⎜ ⎟⎪ + +⎝ ⎠⎪⎨⎛ ⎞⎪
= +⎜ ⎟⎪⎪⎝ ⎠⎩
(1.89)
Ces deux solutions (1.89) sont importantes car elles séparent les deux modes des ondes de compression qui se propagent dans les milieux poreux, ce que Biot (1956) appelle onde de première espèce ou « wave of the first kind » et onde de seconde espèce ou « wave of the second kind ». Il s’agit là d’une particularité des milieux poreux qui est discutée par la suite. Si la solution supposée 1.82 est reprise à partir de grandeurs physiques (non adimension-nelles), on a :
( )expee A i t lxω= +⎡ ⎤⎣ ⎦ (1.90) et il vient à partir des équations 1.85 et 1.88, que :
c
t ωω ωω
= = et d
c
Vl xl lω
= = (1.91&1.92)
La vitesse de phase des ondes V ainsi que leur décrément logarithmique (définie comme le logarithme du rapport de deux amplitudes successives, δ ) sont alors donnés par :
47

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
Re( )V
lω= et 2 Im( ) 2
Im( )V l
lπδω
= = Re( )lπ (1.93&1.94)
En recherchant les racines de 2
1
lω⎛ ⎞⎜ ⎟⎝ ⎠
et 2
2
lω⎛ ⎞⎜ ⎟⎝ ⎠
sous la forme 1 2 1 2
1 2
r ou m ou
ou
l X iXω⎛ ⎞
= +⎜ ⎟⎝ ⎠
, et en consi-
dérant les mêmes simplifications que précédemment, Ishihara (1968) arrive finalement à la conclusion que les vitesses des deux types d’ondes ainsi que leur décrément logarithmique s’écrivent, identiquement à Geerstma & Smit (1961) :
2
2 22 1
1 2 2
2 2 2 2
222 2
2 2
1 11 ,
1 1 1 1
2 , 2 1 1
1 1
c l n
c
l n c l n c
d c
cc
V VV
V V V V
VV
ωω δ ω
π ωω ωω
ωδ ωπ ωω
ω
⎧ ⎛ ⎞⎪ + −⎜ ⎟⎪ ⎝ ⎠= =⎪ ⎛ ⎞ ⎛ ⎞⎪ + +⎜ ⎟ ⎜ ⎟⎪
⎝ ⎠ ⎝ ⎠⎨⎪
ω
ω
⎡ ⎤⎛ ⎞⎪ ⎢ ⎥= = + ⎜ ⎟⎪ −⎢ ⎥⎝ ⎠⎛ ⎞⎪ ⎣ ⎦+ + ⎜ ⎟⎪ ⎝ ⎠⎩
(1.95)
Il peut être intéressant maintenant de considérer deux cas extrêmes quand la fréquence
de vibration ω est très petite ou très grande devant ωc, qu’Ishihara (1968, 1970) appelle « fréquence caractéristique ». En ce qui concerne l’onde de première espèce ou « wave of the first kind », lorsque la fréquence ω est très petite devant la fréquence caractéristique, la vitesse de l’onde tend vers la vitesse Vl donnée par l’équation 1.87. Cette expression est identique à celle qui serait obtenu si le module non drainé du sol dans un cas mono-dimensionnel était divisé par la masse volumique totale du sol (relation 1.96). En conditions non drainées ( ), le module du sol, Ke ε= u, dans la direction x, peut être défini par :
sx us K .eσ + = x avec
sx x x
x x
4( ).e Q.3
s Q.e R.
σ α µ ε
ε
⎧ = + +⎪⎨⎪ = +⎩
u4 K 2.Q R3
α µ ⇒ (1.96) = + + +
Ceci amène à penser que ce type d’onde à basse fréquence se propagent en conditions
non drainées, sans mouvement relatif du fluide par rapport au solide, c’est-à-dire avec un minimum de perte d’énergie due au frottement fluide/solide, ce qui est confirmé par le fait que le décrément logarithmique tend vers 0 dans les mêmes conditions. La fréquence caractéristique varie d’un sol à l’autre et est inversement proportionnelle à la perméabilité. Même pour une perméabilité très large comme celle d’un sable lâche (cf. tableau 1.2), la fréquence caractéristique reste importante correspondant à environ 900 cycles par secondes alors que, par exemple, lors d’un tremblement de terre, les premiers modes atteignent difficilement 50 cycles par secondes (Ishihara, 1968, 1970). Quand cette fois-ci, la fréquence est très grande devant la fréquence caractéristique, la vitesse tend vers la constante Vn, qui peut être vue comme la somme de deux ondes indépendantes appartenant respectivement à la phase fluide et à la phase solide.
48

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
En ce qui concerne l’onde de seconde espèce ou « wave of the second kind », il peut
être remarqué qu’en basse fréquence, l’onde subit une forte atténuation si bien qu’elle ne serait observable que dans le voisinage proche de son point d’émission. En haute fréquence, la vitesse tend vers la constante Vd, nettement plus lente que l’onde du premier type (cf. tableau 1.3) et dont l’expression du numérateur se rapproche du module drainé du sol dans un cas monodimensionnel (relation 1.97).
sx d x
x x
K .es Q.e R. 0σ
ε⎧ =⎪⎨
= + =⎪⎩ et d
4 QK3 R
α µ= + − ² (1.97)
L’arrivée de cette onde P lente est en effet observée expérimentalement par de
nombreux auteurs (Berryman, 1980, Plona, 1980, Nakagawa et al., 1997) et reste la confirmation tangible de l’approche proposée par Biot (1956) ou Ishihara (1968).
1.3.2.2 Ondes de cisaillement
Les équations de propagation d’ondes de cisaillement peuvent être obtenues en appliquant l’opérateur rotationnel au système 1.77 (Ishihara, 1970) :
2
g 2
2
w 2
2w Ww b
W W wb
t t
t t t
ρ
ρ
µ∂ ∂= −∂ ∂
∂ ∂ ∂= −∂ ∂
⎧ ⎛ ⎞∇ +⎪ ⎜ ⎟⎜ ⎟⎪⎪ ⎝
⎨⎛ ⎞⎪ − ⎜ ⎟⎪ ⎜ ⎟⎪ ⎝⎩ ∂ ⎠
ur uur urur
uur uur ur
wt
∂∂ ⎠ (1.98)
où et . ( )rot uω =
ur uuur r( )W rot U=
uur uuur ur
En considérant une propagation uniquement selon l’axe x, les solutions du système 1.98 peuvent être posées sous la forme :
( )( )
exp
expx w
x W
w A i t lx
W A i t lx
ω
ω
⎧ = +⎡ ⎤⎪ ⎣⎨
= +⎦
⎡ ⎤⎪ ⎣ ⎦⎩ (1.99)
En combinant les relations 1.98 et 1.99 , il vient :
2
g
2
W
w w
w
W
bi bil l l l l
bi bil l l l
A A
A 0l
A
ω ω ωρ
ω ω ωρ
µ⎧⎡ ⎤ ⎡ ⎤+ =⎪⎢ ⎥
⎛ ⎞ ⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟ ⎜
⎢ ⎥⎣ ⎦⎢ ⎥⎪⎣ ⎦
⎨⎡ ⎤⎡ ⎤⎪ + =⎢ ⎥⎢ ⎥⎪
⎣ ⎦ ⎢ ⎥⎣⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎦⎩ ⎠
0
(1.100)
dont les solutions non nulles de ω/l sont obtenues en annulant le déterminant ou en éliminant les constantes Aw et AW du système 1.100 :
49

Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
2(1 ) (1 ) 0ss
i Y Yω θω
− − + − =2 (1.101)
avec : 2
s2
2 2
, ,
1
,
ss
p w
p sg w
s
g
YV
V bl V
V V
ω θ ωρ
µ µρ ρ ρ
⎧ ⎛ ⎞ = =⎜ ⎟⎪⎝ ⎠⎪
⎨⎪ = =
+⎩
=
⎪
(1.102)
En remplaçant et l par les opérateurs ω ( )(1 i ∂ ∂ )t et ( )(1 i ∂ ∂ )x dans l’équation 1.101 appliqué à wx, Ishihara (1970) remarque qu’une équation similaire est obtenue lorsqu’une onde se propage dans un corps monodimensionnel viscoélastique linéaire représenté sur la figure 1.23 (Kolsky, 1953).
Figure 1.23 : Modèle viscoélastique équivalent (Ishihara, 1970)
Par analogie avec le cas viscoélastique linéaire, il est établi les expressions de la vitesse des ondes de cisaillement ainsi que du décrément logarithmique (relation 1.103).
2
2
11 ,
1 1
s ss 2
ss s
s s
V V
ωω θδ
π ωω ωθ θω ω
⎛ ⎞+ ⎜ ⎟ ⎛ ⎞−⎝ ⎠= = ⎜
⎛ ⎞ ⎛ ⎞ ⎝ ⎠+ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
ω⎟ (1.103)
Une seule onde de cisaillement se propage dans un milieu poreux dont la vitesse, en
basse fréquence, c’est-à-dire quand la fréquence d’excitation est très petite devant la fréquence caractéristique sω (du même ordre de grandeur que pour les ondes de compression), s’identifie à la vitesse V
cωs et dont l’atténuation est proche de 0. Autrement dit,
ceci revient à négliger dans l’équation 1.101, le second terme en ( )sω ω ce qui revient à
obtenir les solutions soit la solution positive 2 1Y = ( ) sl Vω = . En remplaçant cette solution dans le système 1.100, il vient que et . Comme dans le cas des ondes de compression, en basse fréquence, il n’y a pas de déplacement relatif du fluide par rapport au solide et l’onde se propage en conditions non drainées.
wA A= W xxw W=
1.3.3 Conclusion
50
Partie 1 : Etudes préliminaires 1.3 Propagation d’ondes dans un milieu poroélastique saturé
Dans ce paragraphe le sol est considéré comme un milieu poreux composé d’une phase solide et d’une phase liquide. Biot (1956,1962) établit pour des chargements statiques ou très lents, les relations constitutives liant contraintes et déformations de chacune des phases (relation 1.51). Les paramètres élastiques ont pu être exprimés, dans le cas isotrope, en fonction des compressibilités des différents constituants : grains solide, fluide et squelette granulaire (relation 1.64 ou 1.66).
En terme de propagation d’ondes (vitesses établies aux équations 1.95 et 1.103 avec références aux relations respectivement 1.83/1.87 et 1.102), la particularité des milieux poreux et donc de cette approche apparaît dans l’existence d’une seconde onde de compression, lente, fortement atténuée en basse fréquence. Les résultats issus de Ishihara (1968, 1970) suggère également qu’en basse fréquence, les ondes de compression et de cisaillement se propagent en conditions non drainées. L’hypothèse habituellement considérée voudrait que les ondes de hautes fréquences soient non drainées « parce que l’eau n’aurait pas le temps de s’écouler ». Et qu’au contraire, les ondes de basse fréquence produiraient les conditions dans lesquelles l’eau puisse s’écouler à travers les pores du squelette granulaire puisqu’il y aurait suffisamment de temps pour qu’un équilibre des pressions interstitielles puisse s'établir. Un autre point de vue doit être considéré : en haute fréquence, la longueur d’onde est plus courte si bien que, même s’il y a peu de temps pour l’eau de s’écouler, la distance que l’eau interstitielle doit parcourir est courte. En basse fréquence, bien qu’il y ait suffisamment de temps pour que l’eau s’écoule, elle doit parcourir une grande distance puisque la longueur d’onde est importante.
La question est de savoir quels sont les effets prédominants entre ceux liés au temps et
ceux liés à la distance. Ishihara (1968) considère pour cela la théorie de la consolidation unidimensionnelle de Terzaghi qui établit que la dissipation de la pression interstitielle est gouvernée par une exponentielle négative fonction d’un temps adimensionnel Tv=Cv.t/H² (avec H la longueur de drainage). En supposant que l’échantillon soit placé dans un oedomètre avec un drainage libre à ses deux extrémités et qu’une oscillation sinusoïdale de fréquence ω et de longueur d’onde λ soit imposée, il vient que t=π/ω et que H=λ/2=πV/ω (avec V la vitesse de l’onde). En remplaçant ces valeurs dans l’expression de Tv, on a Tv=Cvω/πV². Pour une vitesse V constante, l’équilibre de la pression interstitielle est alors rapidement atteint pour une fréquence ω élevée et plus lentement pour une fréquence ω faible. Ceci tend à confirmer que l’effet de la longueur d’onde est plus prédominant que celui du temps. Il est intéressant de noter que Coussy (1991) arrive aux mêmes conclusions à partir d’un autre formalisme qui est de considérer la propagation d’ondes comme une propagation de discontinuités.
Une hypothèse tacite est souvent faite par de nombreux ingénieurs en mécanique des
sols qui voudrait que le comportement dynamique des sols puisse être déterminé à partir d’essais non drainés, en se fondant sur l’idée intuitive que l’eau ne peut s’écouler en raison du mouvement rapide du matériau. Ceci reste valable mais parce que les fréquences habituelles des ondes rencontrées en pratique sont en réalité bien plus faibles que les fréquences caractéristiques du matériau.
51

52
Partie 1 : Etudes préliminaires 1.4 Conclusion
1.4 Conclusion L’étude du comportement des sols demande une évaluation précise de leurs propriétés de déformations, qui sont accessibles à partir de nombreuses techniques d’essais in situ et en laboratoire. Les principales sont décrites dans le premier paragraphe. Les essais in situ comprennent, entre autres, les essais de pénétration, de cisaillement, d’expansion et les essais sismiques. Ils ont l’avantage de tester les sols en place. Les essais en laboratoire permettent également de déterminer les paramètres sols en sable mais nécessitent des prélèvements de bonne qualité peu remaniés. Ces essais se sont considérablement diversifiés dans le but de reproduire la nature complexe des sollicitations appliquées aux sols. Une classification de ces essais est présentée. L’amélioration des systèmes de mesure a permis de développer des appareils d’essai de précision évaluant les propriétés des sols pour des déformations inférieures ou égales à 10-5 m/m. Les plus récents caractérisent le sol à partir de sollicitations quasi-statiques mais également dynamiques. L’appareil utilisé dans notre étude en fait partie. Sa présentation fait l’objet de la partie qui suit.
La caractérisation du comportement des sols sous des sollicitations dynamiques (telles que lors d’essais de propagations d’ondes, utilisées aussi bien en laboratoire qu’in situ) requiert une hypothèse réalisée au préalable sur ce même comportement. Il peut être supposé élastique linéaire. Dans ce contexte, les paragraphes 1.2 et 1.3 rappellent les équations constitutives obtenues selon que l’on considère le sol comme un milieu monophasique (isotrope ou isotrope transverse), ou comme un milieu poreux (biphasique : phase solide + phase liquide, isotrope ou isotrope transverse) lorsque celui-ci est saturé. Dans le premier cas, les vitesses des ondes de compression et de cisaillement sont établies au paragraphe 1.2.2. Dans le deuxième cas, les interactions entre les deux phases sont prises en compte et cette particularité se traduit par l’apparition d’une seconde onde de compression, plus lente, appelée parfois « onde de Biot ». Les vitesses des deux ondes de compression et de l’onde de cisaillement sont établies au paragraphe 1.3.2. Lorsque ces ondes se propagent à basse fréquence, il est montré que les conditions de propagation s’assimilent à des conditions non drainées.
53





























