Embed Size (px)
Citation preview

Philippe Mullhaupt
Introduction a l’Analyse et a la
Commande des Systemes Non
Lineaires
12 juin 2007


Avant-propos
L’objectif de ce livre est de presenter les fondements de l’analyse et de lasynthese de loi de commande pour les systemes non lineaires.
Le terme de systeme apparaıt de plus en plus pour designer une multi-tudes de choses, par exemple pour un ensemble organise de concepts, d’arran-gements, d’assemblage, de composition d’idees et d’objets concrets.
Nous entendrons par systeme, une representation mathematique par desequations differentielles ordinaires non lineaires d’une realite physique pou-vant provenir de plusieurs disciplines differentes : biologie, genie mecanique,electrique, chimique, physique, etc.
Ainsi, nous nous demarquons a la fois du sens biologique classique qui en-tend par systeme, un ensemple structure d’elements naturels de meme especeou de meme fonction, et du sens mecaniste qui entend par systeme, un appareilou dispositif forme par une reunion d’organes, d’elements analogues.
Toutefois, la nature de structure est clairement presente dans notre definitionde systeme, et nous mettons clairement la notion d’universalite d’applicationdes theories developpees, pour autant qu’elles puissent donner une adequationa la fois avec l’observation des phenomenes et avec la predicabilite de ceux-ci.
Finalement, la provenance des equations decrivants un modele de la realitedisparaıt lorsque l’on etudie, par voie mathematique, son comportement.
La comprehension de ce comportement fera l’objet de la premiere partieintitulee ”Analyse”, et sa modification, l’objet de la seconde partie intitulee”Synthese”.
Le comportement est ici a comprendre dans son sens large, a savoir nonseulement l’evolution temporelle des solutions de l’ensemble des equationsdifferentielles ordinaires decrivant le modele, mais egalement certaines pro-prietes topologiques caracteristiques de cet ensemble : par exemple, type etqualite des points singuliers (c.-a-d, la classification des points d’equilibrestables ou instables), l’existence de cycle limite, la delimitation du bassind’attraction des points d’equilibre stables, etc.

VI Avant-propos
Une grande partie du livre est consacre a definir convenablement le conceptde stabilite et de donner des outils permettant de determiner avec un nombred’operation reduit cette propriete.
Nous verrons egalement que le comportement peut etre modifie par leconcept de retroaction (ou loi de commande). En modifiant certaines variablesapparaissants dans le systeme d’equations differentielles (que l’on designe parle nom d’entree) en utilisant l’information de certaines autres variables decet ensemble (appelee sortie) de telle sorte que les variables d’entrees soientmises en correspondance avec les variables de sortie, le concept de boucle deretroaction fait son entree, et permet de modifier radicalement le comporte-ment de l’ensemble des equations differentielles. Ainsi, un systeme initialementinstable peut devenir stable.
Il est alors necessaire d’exploiter la definition de la stabilite et de cescaracterisations pour elaborer les correspondances entre entrees et sorties (leslois de commande) de telle sorte de parvenir a ces fins.
Ce livre est issu d’un enseignement a des etudiants en fin d’etudesd’ingenieur en genies electrique, microtechnique, et mecanique. La matiere estcouverte a raison de deux heures par semaines sur une duree d’un semestre.Je conseille vivement d’intercaller des seances a l’ordinateur permettant auxetudiants d’etre confrontes eux-memes aux problemes, ce qui rend le contenude la matiere plus concrete et plus facilement assimilable. Je remercie lesnombreuses volees d’etudiants qui m’ont permis d’affiner l’ouvrage propose etsurtout ma comprehension du sujet.
J’espere egalement avoir pu leur transmettre les connaissances de cettediscipline et transmis un peu de mon enthousiasme pour cette matiere parfoisd’aspect superficiellement aride.
Ce texte est une introduction au sujet et l’objectif est de permettre,dans un volume compact, l’acces a une litterature difficile a un large spectrede lecteurs de formation scientifique et technique diverse. Les prerequis nesont pas excessifs ; de bonnes notions sur les equations differentielles et lesrepresentations associees comme la transformee de Laplace et la notion defonction de transfert sont requises ; il est necessaire egalement de connaıtreles concepts de representation d’etat lineaire, de commandabilite et d’obser-vabilite.
Malheureusement, le traitement propose dans cet ouvrage ne couvre queles systemes ayant une seule entree et ne dependant pas du temps. Le conceptd’observateur non lineaire n’est pas aborde et le concept de gouvernabilitenon lineaire n’est pas traite dans toute sa complexite. L’accent est mis surl’accessibilite, presentee comme condition necessaire a la linearisation d’etat.Les concepts qui ne sont pas traites peuvent etre abordes sereinement une foisque la matiere de ce cours est assimilee. Leur exposition correspond mieux aun cours au niveau doctoral.

Avant-propos VII
Une bibliographie se trouve a la fin de l’ouvrage qui contient exclusivementdes references a des livres complets. C’est un choix personnel dicte par ladifficulte de faire une bibliographie pertinente au niveau introductif sans leserles auteurs d’eminentes publications qui seraient laisses de cote, non pas parmanque d’interet, mais par soucis de compacite. Une solution aurait ete defaire une bibliographie exhaustive mais elle demanderait une liste enorme. Parexemple, les references a la litterature (essentiellement russe) se trouvant dansl’ouvrage [BS70] couvre deja plus de 35 pages.
J’invite donc le lecteur de se referer aux bibliographies detaillees des ou-vrages cites a la fin de cet ouvrage. Le premier de ceux-ci qui m’a transmisl’enthousiasme de la discipline est [SL91]. Il n’est pas etonant que le presentouvrage en est fortement inspire pour la redaction de plusieurs chapitres, enparticulier pour la separation en deux parties, analyse et synthese. Egalementdans cette meme optique, l’ouvrage incontournable de [Kha02], longtempsutilise comme support au cours (avec l’ouvrage de [SL91] precedemment men-tionne), m’a egalement fortement inspire a plusieurs reprises. Je felicite l’au-teur pour son ouvrage, un modele de rigueur et un excellent point d’entreepour quiconque voulant approfondir au dela du present contenu.
Le chapitre geometrie est inspire de [Isi89], [NvdS90], [KN63],[Car71] et[For59], en particulier j’attire l’attention sur ces deux dernieres references pourla notion des 1-formes, du calcul exterieur et de la derivee exterieure. J’inviteegalement le lecteur interesse a consulter l’excellent [Mor01].
La commande par les methodes de Lyapunov est inspiree par plusieurspassages dans [SJK97] et j’en remercie les auteurs.
Cet ouvrage est egalement le fruit de mes nombreuses interactions avecmes doctorants que je remercie vivement, sans qui l’exposition de la matiereserait plus opaque. C’est ainsi que je temoigne ma sincere gratitude a DavideBuccieri, Jean-Yves Favez, Basile Graf, Yvan Michellod, Thierry Prud’hommeet Christophe Salzmann.
Le premier professeur m’ayant transmis les notions essentielles de com-mande d’etat est le professeur Roland Longchamp dont la pedagogie et legout pour la science m’ont pousse a m’orienter vers l’automatique durant mesetudes. Je le remercie vivement pour cela, mais surtout j’aimerais le remercierparticulierement pour avoir encourage la realisation de cet ouvrage, ainsi quepour son soutient sans faille tout au long de la redaction de celui-ci.
Ensuite, j’aimerais chaleureusement remercier le professeur Jean Levinequi m’a permis de me specialiser en commande non lineaire, me transmettantles connaissances indispensables durant mon sejour au Centre Automatique etSystemes de l’Ecole des Mines de Paris a Fontainebleau. Je remercie egalementle professeur Laurent Praly avec qui j’ai pu discute de maniere quotidiennelors du repas de midi.
J’aimerais egalement remercier le professeur Zhong-Ping Jiang pour l’ex-cellent travail en commun effectue a Lausanne et a New York. Son aisance

VIII Avant-propos
avec les inegalites mathematiques est impressionnante. J’ai resume quelquesunes de ces techniques dans le present ouvrage, et je le remercie vivementpour m’avoir transmis cette connaissance.
J’aimerais egalement remercier les professeurs Dominique Bonvin, Sebas-tian Dormido, Balint Kiss, Balasubrahmanyan Srinivasan, ainsi que le Dr.Denis Gillet pour le tres bon travail scientifique effectue en commun aboutis-sant a des publications internationales.
Lausanne, Juin 2007 Philippe Mullhaupt

Table des matieres
Partie I Analyse
1 Definition et proprietes des systemes non lineaires . . . . . . . . . 3
1.1 Principe de superposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Classe de systemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Reponse indicielle disymetrique . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Termes d’ordre superieur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Points d’equilibre isoles multiples . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.6 Explosion en temps fini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.7 Reponse harmonique multiple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.8 Orbites chaotiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Diagramme de phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1 Plan de phase pour les systeme du second ordre . . . . . . . . . . . . . 11
2.1.1 Systeme masse-ressort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Techniques de graphe du plan de phase . . . . . . . . . . . . . . . . . . . . . 12
2.3 Systemes lineaires du second ordre . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1 Solutions numeriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.2 Graphe des pentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.3 Elimination du temps explicitement . . . . . . . . . . . . . . . . . . 15
2.3.4 Elimination du temps implicitement . . . . . . . . . . . . . . . . . 15
2.3.5 Methode des isoclines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.6 Exemple : oscillateur de van der Pol . . . . . . . . . . . . . . . . . 17
2.4 Cycles limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.1 Classification des cycles limites . . . . . . . . . . . . . . . . . . . . . . 20

X Table des matieres
2.5 Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5.1 Type de points d’equilibre . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5.2 Classification des points d’equilibre . . . . . . . . . . . . . . . . . . 22
2.5.3 Theoreme de l’index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.5.4 Theoreme de Bendixson . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.6 Impossibilite du chaos planaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.6.1 Theoreme de Poincare-Bendixson . . . . . . . . . . . . . . . . . . . . 25
2.7 Exemple : dynamique de populations . . . . . . . . . . . . . . . . . . . . . . . 25
2.7.1 Competition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.7.2 Predateur-proie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3 Methode du premier harmonique . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.1 Systeme lineaire et non-linearite statique . . . . . . . . . . . . . . . . . . . 32
3.1.1 Excitation sinusoıdale en boucle ouverte . . . . . . . . . . . . . . 33
3.1.2 Caracteristique passe-bas du systeme lineaire G(s) . . . . . 33
3.1.3 Gain complexe equivalent . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2 Premier harmonique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.1 Decomposition en harmoniques . . . . . . . . . . . . . . . . . . . . . . 37
3.2.2 Equivalent du premier harmonique . . . . . . . . . . . . . . . . . . 37
3.2.3 Calcul de l’equivalent du premier harmonique . . . . . . . . . 38
3.3 Non-linearites communes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3.1 Saturation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3.2 Zone morte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3.3 Relais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.3.4 Hysterese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.3.5 Non-linearites symetriques, continues par morceaux . . . . 46
3.4 Systeme en retroaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.4.1 Representation graphique . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4.2 Double integrateur et oscillateurs lineaires . . . . . . . . . . . . 50
3.4.3 Theoreme de Nyquist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.5 Critere de stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.5.1 Cycle limite stable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.5.2 Cycle limite instable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.6 Fiabilite de l’analyse par le premier harmonique . . . . . . . . . . . . . 61
3.7 Oscillateur de Van der Pol revisite . . . . . . . . . . . . . . . . . . . . . . . . . 61

Table des matieres XI
4 Stabilite au sens de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.1 Point d’equilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.2 Rappel de la notion de stabilite pour les systemes lineaires . . . . 65
4.3 Notion intuitive de la stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.4 Definition mathematique precise de la stabilite . . . . . . . . . . . . . . 66
4.4.1 Notion de distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.4.2 Stabilite : definition formelle . . . . . . . . . . . . . . . . . . . . . . . . 67
4.4.3 Illustration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.4.4 Stabilite asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.4.5 Desavantages de la definition . . . . . . . . . . . . . . . . . . . . . . . . 70
4.5 Methode directe de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.5.1 Candidat de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.5.2 Fonction de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.6 Exemple : robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.6.1 Loi de commande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.6.2 Lois de la mecanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.6.3 Candidat Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.6.4 Fonction de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.7 Theoreme de stabilite locale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.7.1 Preuve (stabilite locale) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.7.2 Preuve de stabilite locale asymptotique . . . . . . . . . . . . . . 77
4.8 Stabilite exponentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.8.1 Exemple : Dynamique des populations . . . . . . . . . . . . . . . 79
4.9 Stabilite globale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.10 Fonction de Lyapunov pour les systemes lineaires . . . . . . . . . . . . 81
4.11 Stabilite locale et linearisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.11.1 Inconvenients de la methode indirecte . . . . . . . . . . . . . . . . 84
4.12 Stabilite exponentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.13 Theoreme d’invariance de LaSalle . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.13.1 Ensemble invariant M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.13.2 Ensemble d’annulation de la derivee de la fonction deLyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.13.3 Exemple : le pendule simple . . . . . . . . . . . . . . . . . . . . . . . . 87
4.14 Methodes de construction des fonctions de Lyapunov . . . . . . . . . 91
4.14.1 Methode de Krasovskii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.15 Methode du gradient variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92

XII Table des matieres
4.16 Resultat d’instabilite 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.17 Resultat d’instabilite 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.18 Resultat d’instabilite 3 : th. de Chetaev . . . . . . . . . . . . . . . . . . . . 96
4.19 Techniques de comparaison et majoration . . . . . . . . . . . . . . . . . . . 97
4.19.1 Les formes quadratiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4.19.2 Inflation et deflation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.19.3 Le developpement limite . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4.19.4 La reintroduction de V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4.19.5 L’equation integrale associee . . . . . . . . . . . . . . . . . . . . . . . . 101
4.19.6 Quelques inegalites standards . . . . . . . . . . . . . . . . . . . . . . . 103
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5 Passivite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.1 Notion intuitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.2 Exemple de systeme statique passif . . . . . . . . . . . . . . . . . . . . . . . . 108
5.3 Systeme statique passif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.4 Exemple de systeme dynamique passif . . . . . . . . . . . . . . . . . . . . . . 109
5.5 Definition differentielle de la passivite . . . . . . . . . . . . . . . . . . . . . . 111
5.6 Proprietes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.6.1 Connexion parallele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.6.2 Connexion par retroaction . . . . . . . . . . . . . . . . . . . . . . . . . . 113
5.6.3 Definition integrale de la passivite . . . . . . . . . . . . . . . . . . . 114
5.7 Passivite des systemes lineaires SISO . . . . . . . . . . . . . . . . . . . . . . . 114
5.7.1 Preuve du lien entre passivite et reponse harmoniquepositive reelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.8 Systeme reel positif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.8.1 Degre relatif et minimum de phase . . . . . . . . . . . . . . . . . . 119
5.8.2 Lien entre Lyapunov et systeme RP . . . . . . . . . . . . . . . . . 122
5.9 Stabilite absolue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
5.9.1 Non-linearite statique de secteur . . . . . . . . . . . . . . . . . . . . 128
5.9.2 Definition de la stabilite absolue . . . . . . . . . . . . . . . . . . . . . 128
5.9.3 Conjecture de M. A. Aizerman . . . . . . . . . . . . . . . . . . . . . . 130
5.9.4 Critere du cercle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.9.5 Critere de Popov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136

Table des matieres XIII
Partie II Synthese
6 Elements de Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
6.2 Variete, Cartes et Atlas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6.2.1 Diffeomorphisme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
6.3 Solution de l’equation differentielle . . . . . . . . . . . . . . . . . . . . . . . . 150
6.4 Champ de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
6.5 Espace dual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
6.6 Produit tensoriel et forme multilineaire . . . . . . . . . . . . . . . . . . . . . 152
6.7 Produit scalaire et produit exterieur en dimension deux . . . . . . 153
6.7.1 forme bilineaire symetrique . . . . . . . . . . . . . . . . . . . . . . . . . 154
6.7.2 forme bilineaire antisymetrique (alternee) . . . . . . . . . . . . . 154
6.7.3 Produit exterieur de deux formes lineaires . . . . . . . . . . . . 155
6.8 Forme multilineaire alternee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
6.9 Cotangent et les 1-forme differentielles . . . . . . . . . . . . . . . . . . . . . 157
6.10 Le gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
6.11 Derivee de Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
6.12 Crochet de Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
6.12.1 Proprietes du crochet de Lie . . . . . . . . . . . . . . . . . . . . . . . . 162
6.13 Differentiation exterieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
6.13.1 Differentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
6.13.2 Derivation exterieure d’une 1-forme . . . . . . . . . . . . . . . . . . 165
6.13.3 Derivation exterieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
6.13.4 Theoreme de Stokes generalise . . . . . . . . . . . . . . . . . . . . . . 167
6.14 Integrabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
6.15 Difference entre une 1-forme exacte et integrable. . . . . . . . . . . . . 170
6.16 Differentielles et derivation exterieure . . . . . . . . . . . . . . . . . . . . . . 171
6.17 Proprietes de la differentielle exterieure . . . . . . . . . . . . . . . . . . . . . 173
6.18 Condition d’exactitude et d’integrabilite . . . . . . . . . . . . . . . . . . . . 174
6.19 Interpretation geometrique de l’integrabilite et de lanon-integrabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
6.20 Les deux formes du theoreme de Frobenius . . . . . . . . . . . . . . . . . 184
7 Commande par linearisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
7.1 Linearisation locale et stabilisation . . . . . . . . . . . . . . . . . . . . . . . . 192
7.1.1 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193

XIV Table des matieres
7.2 Linearisation exacte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
7.3 Equation d’erreur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
7.3.1 Fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
7.3.2 Equation differentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
7.3.3 Placement de poles et equation d’erreur . . . . . . . . . . . . . . 201
7.4 Systemes lineaires SISO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
7.4.1 Sortie specifiee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
7.4.2 Sortie non specifiee, formule d’Ackermann . . . . . . . . . . . . 212
7.5 Linearisation entree-sortie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
7.6 Linearisation exacte entree-etat . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
7.6.1 Conditions pour la sortie plate . . . . . . . . . . . . . . . . . . . . . . 217
7.6.2 Exemple : Robot avec joint flexible . . . . . . . . . . . . . . . . . . 220
7.6.3 Exemple : Bille roulant sur une barre . . . . . . . . . . . . . . . . 224
7.7 Commande d’une chaıne d’integrateurs . . . . . . . . . . . . . . . . . . . . . 226
7.7.1 Stabilisation et poursuite . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
7.7.2 Transit en temps fini avec commande a priori . . . . . . . . . 227
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
8 Commande par les methodes de Lyapunov . . . . . . . . . . . . . . . . . 233
8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
8.2 Fonction de Lyapunov de Commande . . . . . . . . . . . . . . . . . . . . . . 234
8.3 Structure cascade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
8.3.1 Restriction de la croissance du terme de couplage . . . . . . 237
8.4 Passivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
8.5 Phenomene du peaking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
8.6 Backstepping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
8.6.1 Fonction de Lyapunov reduite . . . . . . . . . . . . . . . . . . . . . . . 248
8.6.2 Fonction de Lyapunov complete . . . . . . . . . . . . . . . . . . . . . 249
8.6.3 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
Litterature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255

Partie I
Analyse


1
Definition et proprietes des systemes non
lineaires
La notion de systeme non lineaire est fondee sur le non respect du principede superposition. Les systemes n’obeissant pas au principe de superpositionsont tres nombreux. Nous presenterons une sous-classe de tels systemes pourlesquels les equations differentielles ordinaires sont suffisantes a leur descrip-tion. Cette classe sera etudiee tout au long de cet ouvrage. Finalement, plu-sieurs proprietes propres a cette classe sont illustrees a travers divers exemple.
1.1 Principe de superposition
Un systeme lineaire pourvu d’une entree u et d’une sortie y obeit au prin-cipe de superposition.
Definition 1.1. (Prinicipe de superposition). Soit deux signaux d’entrees u1
et u2 engendrants deux signaux de sorties y1 y2. La reponse a la somme desentrees u = u1 + u2 est la somme des reponses individuelles, i.e. y = y1 + y2.
Une consequence directe de ceci est :
Caracteristique 1.2. Pour tout systeme obeissant au principe de superposition,la reponse a une amplification du signal par un facteur α engendre une ampli-fication de la sortie par un meme facteur α. En d’autres termes si y corrsponda u alors la reponse a αu est αy.
Ce principe est a l’origine meme de la definition d’un systeme lineaire.
Definition 1.3. Tout systeme obeissant au principe de superposition est unsysteme lineaire.
Par consequent tout systeme qui n’obeit plus au principe de superpositionest un systeme non-lineaire, l’objet de ce livre.

4 1 Definition et proprietes des systemes non lineaires
1.2 Classe de systemes
La classe de systeme qui sera etudiee dans ce texte est celle decrivant lesmodeles de systemes physiques qui peuvent se representer par un ensembled’equations differentielles ordinaires. Le modele mathematique du systemephysique s’ecrit
x = f(x, u), (1.1)
ou x represente le vecteur d’etat x =(
x1 x2 . . . xn)T
de dimension n et
u un vecteur de grandeur d’entree u =(
u1, u2, . . . um)T
avec m grandeurs decommandes ui ∈ R, i = 1, . . . ,m.
Tout au long de cet ouvrage, nous supposerons que f(x, u) apparaissantdans (1.1) est une fonction continue de ces deux arguments. De plus cettecontinuite sera telle que la solution de (1.1) est unique pour des conditionsinitiales x0 et une commande uo determinees. La condition sur cette conti-nuite est que f(x, u) soit Lipschitz continue (en chaque point l’evolution infi-nitesimale locale de f(x, u) doit etre bornee).
Definition 1.4. La fonction f(x, u) est appelee Lipschitz continue selon cesdeux arguments x et u lorsque, d’une part, elle est continue selon ses deuxarguments x et u et, d’autre part, lorsqu’il existe deux constantes c1 ∈ R etc2 ∈ R telles que pour toute valeur de x1 et x2, (resp. u1 et u2),
‖f(x1, u) − f(x2, u)‖ ≤ c1‖x1 − x2‖,resp.
‖f(x, u1) − f(x, u2)‖ ≤ c2‖u1 − u2‖.
Le lecteur interesse par la necessite et la suffisance de cette condition estinvite a consulter [Kha02].
Cependant, nous n’expliquerons pas completement comment obtenir untel modele, etant donne qu’il serait alors necessaire de couvrir un tres grandnombres de disciplines connexes : chimie, physique, mecanique du solide, elec-trotechnique, etc., chacune ayant une theorie de la modelisation propre condui-sant a des equations differentielles ordinaires susmentionnees.
Avant d’entrer dans le vif du sujet, mentionnons que les systemes nonlineaires possedent des particularites singulieres qui sont completement ab-sente des systemes lineaires. Certaines de ces proprietes sont presentees ci-apres.
1.3 Reponse indicielle disymetrique
Considerons le systeme lineaire simple

1.3 Reponse indicielle disymetrique 5
x = −x+ u.
Un signal d’entree symetrique et carre entre 0 et +1 lui est applique. Le signalde sortie x(t) associe suit le signal d’entree, mais avec une inertie. Les phasesde montees alternent avec les phases de descentes de maniere symetrique. Lediagramme de gauche de la figure 1.1 illustre le resultat.
Par contre, le systeme non-lineaire simple
x = −|x|x+ u
exhibe un comportement disymetrique. En effet, la phase de montee est plusrapide que la phase de descente (a droite de la figure 1.1).
0
1
2
3
0 20 40
0
1
2
0 20 40
Fig. 1.1. A gauche, les phases de montee et de descente sont symetriques dans lecas de l’equation x = −x+u, ou u est un signal carre entre +1 et 0. A droite, lorsquex = −[x[x+ u, ce n’est plus le cas.
Remarque 1.5. Dans le cas du systeme non lineaire x = |x|x+u, le terme |x|xpeut etre localement interprete comme le membre de droite ax d’un systemelineaire x = ax, ou l’inverse de la constante de temps, denotee a, corresponda |x|. Ainsi, autour de la valeur maximale de x, correspondant au regimepermanent lorsque l’entree vaut 1, le systeme est rapide. Par contre, autourde la valeur de x nulle, la constante de temps est grande, et le systeme lent.
A la montee, seul l’entree u = +1 force rapidement le systeme a se deplacer,bien que la constante de temps soit grande (systeme lent). L’effet de x estnegligeable par rapport a l’entree dans la phase de montee. A la descente, parcontre, meme si la constante de temps est initialement grande, l’entree estnulle, et la valeur x se modifie en fonction d’elle meme, sans etre aidee par lacontribution de l’entree. Initialement rapide, le systeme ralentit vite, a causede la diminution de x.

6 1 Definition et proprietes des systemes non lineaires
1.4 Termes d’ordre superieur
Lorsque la solution d’un systeme non lineaire s’eloigne suffisamment d’unpoint d’equilibre, les termes d’ordre superieur du developement en serie (au-tour de ce point d’equilibre) contribuent de maniere croissante a l’influence surla derivee. Il se peut tres bien que ces termes presentent un effet destabilisantsur le comportement global.
Par exemple, le systeme
x = −x+ x2, (1.2)
ne comporte pas d’entree et possede un point d’equilibre a l’origine.
Plusieurs conditions initiales sont considerees, certaines inferieures en va-leur absolue a l’unite, et d’autres superieures. Elles sont choisies symetriquespar rapport a l’origine, au sens ou, si une simulation est effectuee pourx(0) = x0, alors une autre l’est egalement pour x(0) = −x0. Les solutionsde l’equation differentielle associees aux conditions initiales sont representeesa la figure 1.2.
-1
0
1
2
3
0 2 4
t
x
Fig. 1.2. Les solutions de x = −x+x2 sont representees pour les conditions initialesx(0 suivantes : ±0.2, ±0.4, ±0.6, ±0.8, ±1.01, ±1.1. L’instabilite apparaıt des quex(0) > 1.
La premiere constatation est que le comportement n’est pas symetrique parrapport au signe des conditions initiales. La seconde, et la plus importante, estqu’il y a, a la fois des conditions initiales pour lesquelles la solution s’eloignede plus en plus du point d’equilibre au fur et a mesure que le temps progresse,et d’autres pour lequel la solution converge vers la valeur d’equilibre x = 0.La separation se produit lorsque la condition initiale x(0) est superieure a 1.
Remarque 1.6. Contrairement au systemes lineaires, la stabilite peut dependredes conditions intiales.

1.5 Points d’equilibre isoles multiples 7
Pour mieux comprendre le phenomene, les fonctions x et x2 sont representeesa la figure 1.3
0 0.5 10
0.5
1
1.5
x
x2
x
Fig. 1.3. La stabilite de x = −x + x2 est determine par le signe du membre dedroite. La figure represente les deux fonctions x et x2. On constate que x2 devientplus grand que x lorsque x > 1. Le signe du membre de droite change et conduit al’instabilite.
Remarque 1.7. Le signe devant le terme x ou x2 est fondamental. En effet,x = x est un systeme instable, car la solution x(t) = et diverge lorsque t→ ∞.Par contre x = −x est stable ; la solution x(t) = e−t converge vers 0 lorsquet → ∞. Ainsi, dans l’equation differentielle, le terme x2 a une tendance adestabiliser le systeme, et −x a le stabiliser. La stabilite est garantie pourautant que le terme −x domine x2 pour x positif, ce qui est le cas lorsquex < 1.
1.5 Points d’equilibre isoles multiples
En examinant l’equation (1.2) de l’exemple precedent, une particularitesupplementaire peut etre remarquee. Bien que x = 0 soit un point d’equilibre,car x = 0, il n’est pas unique. En effet, Il existe d’autres points d’equilibrequi sont obtenus en resolvant −x + x2 = 0 par factorisation, conduisant ax(x − 1) = 0, et un nouveau point d’equilibre x = 1 apparait..
Ceci est a mettre en perspective avec le cadres des systemes lineaires, pourlesquels, lorsque le point d’equilibre est isole, alors il est unique. En effet, lacondition d’equilibre pour un systeme x = Ax est 0 = Ax. Lorsque A estinvertible (i.e. |A| 6= 0) le point d’equilibre est unique et correspond a x = 0.Lorsque A est singuliere alors le noyau est un sous-espace vectoriel et doncles points d’equilibre multiples sont connectes. Ainsi dans ce cas, si x 6= 0 etx ∈ x | Ax = 0 alors λx 6= 0 est aussi un point d’equilbre ∀λ ∈ R∗.

8 1 Definition et proprietes des systemes non lineaires
1.6 Explosion en temps fini
Dans le cas lineaire, l’instabilite est toujours bornee par une exponentielle.Par exemple x = 3x tend vers l’infini sans jamais depasser une exponentiellex(t) < x0e
3.01t. La raison de ceci tient au fait que l’expression de la deriveepeut etre bornee par une quantite proportionnelle a la valeur de l’etat. Laconstante de proportionalite donne la vitesse de l’exponentielle.
Dans le cas non lineaire des surprises peuvent se produire. Par exemple,pour le systeme (1.2), la divergence vers l’infini est beaucoup plus rapide quedans le cas lineaire. La solutions analytique de cette equation est
x(t) =x0e
−t
1 − x0 + x0e−t.
La solution devient de plus en plus grande lorsque t→ 1. Ainsi, elle divergevers l’infini en un temps fini.
1.7 Reponse harmonique multiple
Un autre phenomene tres interessant est la reponse polyharmonique d’unsysteme non lineaire a une excitation ne contenant qu’une seule harmonique.Cet aspect sera presente dans le contexte de la methode du premier harmo-nique au chapitre 3
1.8 Orbites chaotiques
On considere le systeme
x+ 0.1x+ x5 = u = 6 sin(t) (1.3)
Deux trajectoires sont representees, l’une correspondant a la condition
intiale x0 =(
0.1 0.2)T
et l’autre a x0 =(
0.105 0.2)T
. On constate que memesi les deux conditions initiales sont tres proches l’une de l’autre, les trajectoiresresultantes sont rapidement tres differentes, sans pour autant devenir nonbornees (les valeurs de la position x demeurent dans un interval ferme etborne).
Cette hypersensibilite aux conditions intiales et l’aspect presque imprevisibledu resultat donne l’impression que le systeme est soumis a des perturbationsaleatoires. Mais il n’en n’est rien. Le systeme est parfaitement deterministe.Un tel comportement est appele ”chaos”. Comme exemple supplementaire,considerons l’oscillateur de Lorenz,

1.8 Orbites chaotiques 9
0 10 20 30 40 50 60
-2
-1
0
1
2
t
x
Fig. 1.4. Les solutions de l’equations differentielle (1.3) sont representees pourdeux conditions initiales proches (x(0) = 0.1, et x(0) = 0.105 ; x(0) = 0.2 pour lesdeux cas). Bien que les trajectoires resultantes sont proches dans la premiere portionhorizontale, elles deviennent tres differentes dans la deuxieme portion horizontaledu graphique.
x = −σx+ σy
y = rx − y − zx
z = −bz + xy,
ou seuls les deux termes en bleu, zx d’une part, et xy d’autre part, chacunproduits de deux etats, sont responsables de la nature non lineaire de la dy-namique. Les parametres σ, b, r sont fixes. Un exemple de trajectoire estrepresente a la figure 1.5.
-10
0
10
-20
-10
0
10
20
10
20
30
40
-10
0
10
-20
-10
0
10
20
Fig. 1.5. Orbite chaotique de l’oscillateur de Lorenz pour σ = 10, b = 83, r = 28.

10 1 Definition et proprietes des systemes non lineaires
On constate plusieurs phenomenes interessants :– Une trajectoire solution ne repasse jamais par le meme point.– Il n’y a pas de solution periodique.– Il existe des voisinages tels que pour toute condition initiale comprise
dans ce voisinage, la solution repasse une infinite de fois dans le voisi-nage. De plus ce voisinage peut etre pris arbitrairement. Autrement dit,en definissant V0 (x0 ∈ V0), il existe une infinite d’instant temporelst0 < t1 < t2 < . . . t∞ pour lesquels x(ti) ∈ V0 pour i ∈ N.
– Les solutions demeurent dans un cube (un ensemble ferme et borne, ouautrement dit un ensemble compact).
– Pour deux conditions intiales arbitrairement proches, les solutions res-pectives finissent par diverger l’une de l’autre pour finalement plus seressembler du tout.

2
Diagramme de phase
Pour les systemes mecaniques, la modelisation en utilisant les coordonneesgeneralisees (mecanique analytique) conduit a un modele comportant desderivees secondes des coordonnees generalisees exprimees en fonction des co-ordonnees generalisees ainsi que de leur premiere derivee. Pour simuler de telssystemes, il est necessaire de connaıtre les conditions initiales, c’est-a-dire l’en-semble des coordonnees generalisees ainsi que leurs premieres derivees. Ainsi,une solution du systeme d’equations est un ensemble de fonctions du temps,une pour chacune des coordonnees generalisees et une pour la premiere derivee(vitesse) correspondante. Les variables de phase forment un tel ensemble degrandeurs. De maniere plus generale, le formalisme d’Hamilton permet d’as-socier aux coordonnees generalisees q1, . . . , qn, des variables vitesses parti-culieres, appelees moments generalises p1, . . . , pn. L’espace de phase est l’en-semble des 2n grandeurs q1, . . . , qn et p1, . . . pn. Cet ensemble constitue donc
les grandeurs d’etat du systeme, a savoir x =(
q1 . . . qn p1 . . . pn)T
. Cepen-dant nous separons ces grandeurs d’etat en deux groupes.
Dans ce chapitre, les systemes de seond ordre, ou l’espace de phase estl’ensemble q, et q, seront etudies. De plus, ces systeme ne proviendrons pasforcement du domaine mecanique.
2.1 Plan de phase pour les systeme du second ordre
Pour les systemes du second ordre donnes par
q = f(q, q), (2.1)
on designera par q ∈ R et q ∈ R les variables de phases.
Maintenant le plan de phase n’est rien d’autre que le plan ou l’on representedans l’axe horizontal, la variable q et selon l’axe vertical, la variable q. Une

12 2 Diagramme de phase
solution a l’equation (2.1) sera donne par deux fonctions du temps
q = φq(t)
q = φq(t)
telles quedφqdt
= f(φq, φq)
Maintenant, en faisant varier le temps, q et q sont obtenus par substitution.Une courbe parametree est alors decrite dans le plan de phase par les deuxcoordonnees x = φq(t) et y = φq(t). Il est important de remarquer que letemps n’apparaıt pas explicitement.
2.1.1 Systeme masse-ressort
Afin d’illustrer les techniques de traces des orbites dans le plan de phase,le systeme simple suivant est utilise :
q + q = 0.
C’est l’equation dynamique d’un systeme mecanique comportant un res-sort parfait a l’extremite duquel se situe une masse. L’ensemble forme un oscil-lateur mecanique. Les parametres sont normalises a l’unite. La representationschematique est donnee a la figure 2.1.
k = 1 m = 1
Fig. 2.1. Systeme masse ressort.
2.2 Techniques de graphe du plan de phase
Plusieurs techniques sont disponibles pour representer les orbites destrajectoires d’un systeme dynamique a deux etats. Certaines consistent a

2.3 Systemes lineaires du second ordre 13
representer exactement le trace d’autres a n’obtenir qu’une information par-tielle concernant celles-ci, par exemple en ne representant que l’informationconcernant la direction de la tangente en plusieurs points du plan de phase.Les methodes suivantes seront detaillees :
1. Methodes informatiques– Solutions numeriques pour diverses conditions initiales– Graphe des pentes
2. Methodes papier crayon– Solution explicite des equations
a) en eliminant le temps explicitement
b) en eliminant le temps implicitement
3. Methodes mixtes– Methode des isoclines
2.3 Systemes lineaires du second ordre
Un systeme lineaire autonome du second ordre ne comporte pas d’entreeet est representable par un modele d’etat comportant deux etats.
x1 = a11x1 + a12x2
x2 = a12x2 + a22x2
que l’on peut representer matriciellement sous la forme x = Ax avec
A =
(
a11 a12
a21 a22
)
Les trajectoires d’un tel systemes peuvent etre representees dans la planpar des courbes parametrees par le temps
Fig. 2.2. Figure representant une trajectoire d’un systeme lineaire du second ordre
Les trajectoires possibles qui varient en fonction de la valeur numeriquesdes parametres aij peuvent etre regroupees en categories en fonction de lanature des valeurs propres de la matrice A.
Soit λ1 et λ2 les deux valeurs propres obtenues en resolvant | A−λI |= 0.Quatre cas sont a distinguer, ainsi les valeurs propres sont :

14 2 Diagramme de phase
1. toutes deux reelles de meme signe. C’est un foyer stable.
2. reelles mais de signe oppose. C’est un point scelle.
3. purement imaginaire. C’est un centre.
4. complexes conjuguees. C’est un foyer.
2.3.1 Solutions numeriques
Les logiciels d’aide au calcul differentiels qu’ils soient orientes vers le calculformel (Maple, Mathematica, Reduce) ou vers le calcul numerique (Matlab,SysQuake, LME, Scilab) possedent un solveur d’equations differentielles or-dinaire. Il est alors tres aise d’obtenir les solutions d’un systeme dynamiqueplanaire en y changeant les conditions initiales d’une simulation a l’autre ren-dant ainsi la possibilite d’y reveler la nature des orbites sous-jacentes. Dansle cas du systeme masse ressort precedemment decrit nous pourrions obtenirla representation donnee a la figure suivante :
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
Fig. 2.3. Trajectoires simulees du systeme masse-ressort.
2.3.2 Graphe des pentes
Autrefois, l’ordinateur faisait defaut et la determination de solutions nepouvaient pas proceder par une methode inductive comme celle de Runge-Kutta etant donne le nombre d’operations prohibitif que cela impliquerait.Ainsi il etait plus commode de ne calculer qu’un certain nombre de pentesen des points predetermines du plan de phase. Les pentes sont obtenues enevaluant f1(x1, x2) et f2(x1, x2), puis en representant un petit segment dedroite ayant une denivelee f2(x1, x2) sur une distance horizontale f1(x1, x2) aupoint (x1, x2). La longueur du segment peut soit etre proportionel a la normede f ou fixe a une longueur unitaire arbitraire. Ironiquement, l’ordinateur

2.3 Systemes lineaires du second ordre 15
est ici aussi d’une grande aide. En prenant une grille equidistribuee selon lesdeux axes x1 et x2, on obtient une representation donnee a la figure 2.4 pourle systeme masse-ressort.
x =`
x1 x2
´T
f(x) =
„
f1(x1, x2)f2(x1, x2)
«
Fig. 2.4. Graphique des elements de pente pour le systeme masse-ressort.
2.3.3 Elimination du temps explicitement
Lorsque le systeme dynamique est relativement simple comme c’est le casdu systeme masse ressort, il est envisageable d’obtenir la solution de maniereexplicite a l’equation differentielle decrivant la dynamique.
x(t) = x0 cos t+ x0 sin t
x(t) = −x0 sin t+ x0 cos t
Cependant il est necessaire de se debarasser de la parametrisation du tempsafin de representer l’orbite. En utilisant l’identitie cos2 t + sin2 t = 1, il estpossible d’exprimer la relation
x2 + x2 = x20 + x2
0,
qui represente un cercle centre en (0, 0) de rayon√
x20 + x2
0.
2.3.4 Elimination du temps implicitement
Remarquons que dans l’exemple precedent le temps est elimine apresl’integration de l’equation differentielle. Il est tout a fait possible d’en fairel’elimination lorsque celui-ci apparaıt encore a l’etat de differentielle :

16 2 Diagramme de phase
x1 = x2 =dx1
dt
x2 = −x1 =dx2
dt
dx1
x2= −dx2
x1= dt
L’integration se fait alors sans faire intervenir le temps et revet dans lecas du systeme masse un caractere plus simple que l’obtention de la solutionexplicite.
∫
x2dx2 = −∫
x1dx1
x21 + x2
2 = c = x210 + x2
20
Remarque 2.1. La relation avec le parametrage temporel est perdue.
graphique de x2 + x2 = x20 + x2
0
x
Fig. 2.5. Graphique associee a l’equation x2 + x2 = 1 = x20 + x2
0.
2.3.5 Methode des isoclines
Le methode du graphique des pentes a procede par l’evaluation sur unegrille donnee a priori et de geometrie arbitraire. Il est interessant de se de-mander s’il y a une possibilite de trouver un lieu de points, le long duquel il

2.3 Systemes lineaires du second ordre 17
serait plus interessant de calculer les pentes. Par exemple, afin de minimiser lenombre d’evaluation, il serait interessant de calculer l’ensemble de points au-quel le champ de vecteur de la dynamique ait une pente commune. En variantla pente, il est alors possible d’obtenir un ensemble de lieux.
dx2
dx1= α =
f2(x1, x2)
f1(x1, x2)
x+ x = 0
α =−x1
x2
x2 = −1
αx1
α = 1, x2 = −x1
x
Fig. 2.6. La methode des isoclines consiste a choisir un element de pente et derepresenter le lieu des points comportant la meme pente.
application systematique pour differentes valeurs de α
2.3.6 Exemple : oscillateur de van der Pol
x+ ǫ(x2 − 1)x+ x = 0
ǫ = 0.5 x0 = x0 = 1
Graphe des pentes et trajectoires
Droite d’isocline α

18 2 Diagramme de phase
Fig. 2.7. Lorsque la methode des isoclines est utilisee pour representer les elementsde pentes identiques, ces derniers sont traces en respectant la symetrie du cercle etdonne un aspect plus naturel que lorsqu’une grille uniformement espacee est utilisee.
-2 -1 1 2
-2
-1
1
2
Fig. 2.8. Une trajectoire de l’oscillateur de van der pol est representee pour lacondition intiale x1(0) = 1 et x2(0) = 1 et pour la valeur du parametre ǫ = 0.5.
x+ ǫ(x2 − 1)x+ x = 0
α =x
x= −ǫ(x2 − 1) − x
x
avec droites d’isoclines
2.4 Cycles limites 19
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
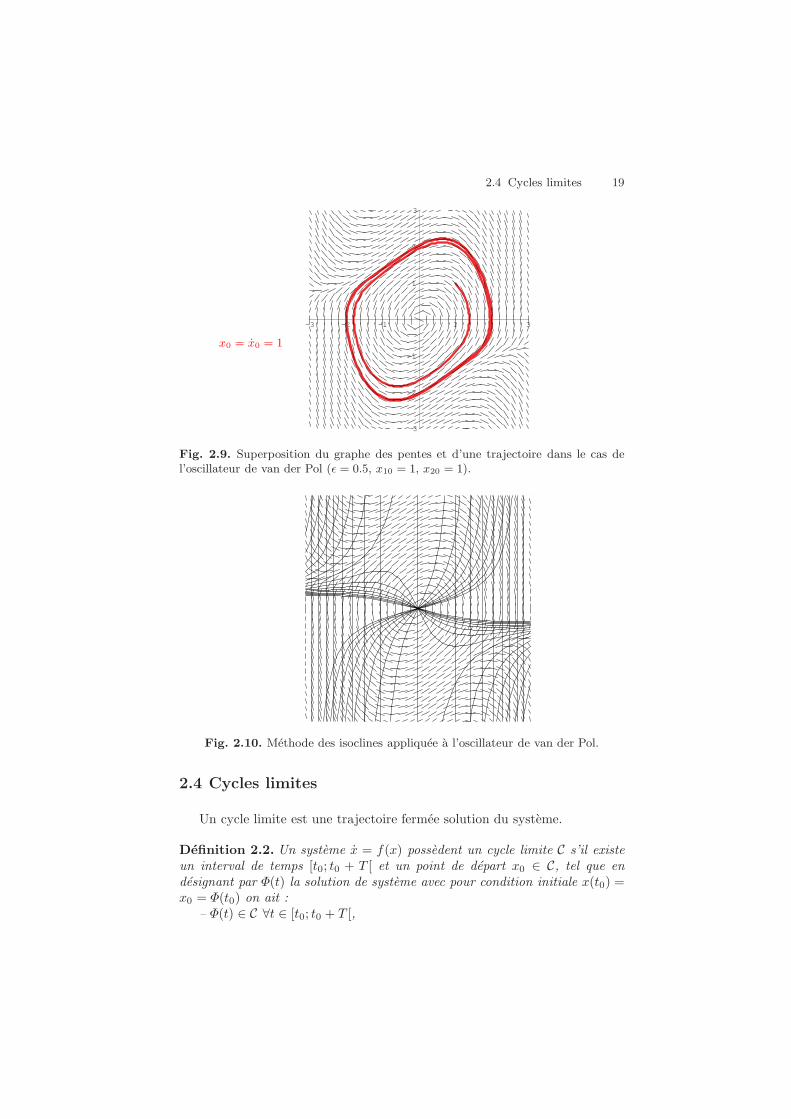
x0 = x0 = 1
Fig. 2.9. Superposition du graphe des pentes et d’une trajectoire dans le cas del’oscillateur de van der Pol (ǫ = 0.5, x10 = 1, x20 = 1).
Fig. 2.10. Methode des isoclines appliquee a l’oscillateur de van der Pol.
2.4 Cycles limites
Un cycle limite est une trajectoire fermee solution du systeme.
Definition 2.2. Un systeme x = f(x) possedent un cycle limite C s’il existeun interval de temps [t0; t0 + T [ et un point de depart x0 ∈ C, tel que endesignant par Φ(t) la solution de systeme avec pour condition initiale x(t0) =x0 = Φ(t0) on ait :
– Φ(t) ∈ C ∀t ∈ [t0; t0 + T [,

20 2 Diagramme de phase
– Φ(T ) = x0.
2.4.1 Classification des cycles limites
Definition 2.3. Soit C un cycle limite
1. stable : toutes les trajectoires dans un voisinage du cycle → C.
2. instable : toutes les trajectoires divergent de C.
3. semi-stable : certaines trajectoires convergent vers C.
2.5 Index
L’index est une propriete topologique des systemes en rapport avec uneregion determinee du plan de phase. Elle est invariante pour des petites pertur-bations continues du systeme considere. Cette propriete permet, entre autres,d’etablir des conditions necessaires pour l’existence de cycles limites.
Definition 2.4. (Index en un point du plan de phase). Trois choix sont ef-fectues :
1. Une courbe autour du point auquel l’index est evalue. Cette courbe estchoisie de maniere arbitraire, mais comprise dans un disque de taille suf-fisamment petite. Theoriquement, le disque est de taille infinitesimale.
2. Une parametrisation de la courbe dans le sens trigonometrique positif.
3. Une suite arbitraire de points de la courbe dans le sens de la parametrisation.
Les points sont alors numerotes selon cette progression (xi, i = 1, . . . , n). Ledernier point xn correspond au point initial x1 (x1 = xn). En chacun despoints choisis xi, i = 1, . . . n, le vecteur f(xi), correspondant au systeme x =f(x), est evalue. On obtient ainsi une suite de vecteurs fi = f(xi). numerotesde i = 1 a i = n. Les vecteurs sont ensuite reportes sur un autre espace de tellesorte que leurs origines se confondent. L’index mesure alors l’angle modulo 2πque l’extremite des vecteurs fi parcourent dans le sens trigonometrique positif.
L’index est independant a la fois de la courbe choisie (pour autant quellesoit comprise dans un disque de taille suffisamment petite), des points choisisxi et de leur nombre n.

2.5 Index 21
Exemple 2.5. Soit un contour et un systeme tel que :
1
1
2
34
5
6
78
2
3
4
5
6
7
8
alors l’index vaut : +1.
Exemple 2.6. Soit un contour et un systeme tel que :
12
3
4
5
6 7
8
1
23
4
5
6
78
alors l’index vaut : −1.

22 2 Diagramme de phase
Exemple 2.7. Soit un contour et un systeme tel que :
1
2
345
6
7
8
1
2 4 8
6
3 5 7
alors l’index vaut : 0.
2.5.1 Type de points d’equilibre
Les points d’equilibre peuvent etre classifies selon leur index. Par exemple,les points d’equilibre rencontres lors de l’analyse des systemes lineaires dudeuxieme ordre peuvent etre regroupes en fonction de leur caracteristique ex-primee par la position des valeurs propres. Ils peuvent egalement etre classifiesen fonction de leur index. Ceci donne :
1. point selle (S) index : −1
2. noeud (N) index : +1
3. foyer (N) index : +1
4. centre (N) index : +1
Caracteristique 2.8. Les index sont independants de la stabilite.
Pour illustrer la validite de cette propriete, il suffit de renverser le sensdes vecteurs dans les trois exemples precedents. Il est alors ainse de verifierque l’index ne change pas. Le fait de renverser le sens des vecteurs a commeconsequence de changer la stabilite du point d’equilibre lorsque ce dernier estcompris dans la courbe de taille infinitesimale. Les considerations de stabiliteseront abordes dans le prochain chapitre. Il y sera question d’un traitementrigoureux de la question.
2.5.2 Classification des points d’equilibre
Il est possible de classifier les points d’equilibre x d’un systeme non lineairex = f(x) en fonction du type de point d’equilibre du systeme linearise x =∂f∂x |x=x x = Ax. Ainsi on parlera d’un

2.5 Index 23
1. point selle (S)
2. noeud (N)
3. foyer (N)
4. centre (N)
en fonction des valeurs propres de A conformement a l’etude des systemeslineaires planaires.
2.5.3 Theoreme de l’index
La definition 2.4 determine l’index d’un point particulier de l’espace dephase. De maniere analogue, il est possible de definir un index pour une courbequelconque.
Definition 2.9. L’index d’une courbe est obtenu de maniere analogue a cellede l’index d’un point du plan de phase. Seul la restriction a une courbe com-prise dans un disque de taille suffisamment petite est relaxee. Ainsi, l’indexd’une courbe depend de la courbe choisie contrairement au cas de la defintion2.4.
A l’aide de cette definition, il est possible d’evaluer l’index d’un cyclelimite, etant donne que ce dernier est une courbe particuliere. Le resultatsuivant est important.
Theoreme 2.10. (Th. de l’index de Poincare) Soit N le nombre de noeuds,centres et de foyers et S le nombre de points selles. Si un cycle limite existe,les points singuliers que le cycle encercle sont tels que N = S + 1.
Par contraposition au principe susmentionne, il est possible d’etablir lanon existence d’un cycle limite en fonction du non respect de la condition dece theoreme. La demonstration decoule d’une propriete simple d’addition desindex des points d’equilibre compris dans une courbe particuliere.
Caracteristique 2.11. Soit une courbe particuliere donnee. L’index de cettecourbe est la somme des index de tous les points d’equilibre compris al’interieur de cette courbe.
Comme un cycle limite est une solution du systeme dynamique, les vecteursy sont en tout point tangent. Il est donc aise, en reportant ces vecteurs en unpoint donne d’un nouvel espace, de constater que leur extremite parcourt untour complet dans le sens identique au sens de parcours du cycle. Ainsi, l’indexdu cycle est +1. Par consequent, il doit y avoir necessairement un exces de 1,des points d’equilibre (compris a l’interieur du cycle) dont l’index est +1 parrapport a ceux dont l’index vaut −1, ce qui donne les conditions du theoreme2.10.

24 2 Diagramme de phase
2.5.4 Theoreme de Bendixson
Soit
x1 = f1(x1, x2)
x2 = f2(x1, x2)
Theoreme 2.12. Pour un tel systeme, aucun cycle limite ne peut exister dansune region Ω du plan de phase dans laquelle ∂f1
∂x1
+ ∂f2∂x2
ne s’annule pas ni nechange de signe.
Preuve. C’est une consequence du theoreme de Stokes. En posant dx1
dt = f1et dx2
dt = f2, la differentielle du temps est eliminee pour obtenir l’expression
dt = f1dx1
= f2dx2
, d’ou l’on deduit que la 1-forme ω = −f1dx1 + f2dx2 s’an-nule le long du cycle. D’autre part, le long du cycle, cette meme 1-formeω = −f1dx1 + f2dx2 peut etre integree. Cette integrale de chemin doit etreegale a l’integrale de surface, sur l’aire comprise a l’interieur du cycle, de ladifferentielle exterieure de cette 1-forme :
∮
ω =∫ ∫
dω.
0 =
∮
−f1dx1 + f2dx2 =
∫ ∫
− ∂f1∂x1
dx1 ∧ dx1 −∂f1∂x2
dx2 ∧ dx1
+∂f2∂x1
dx1 ∧ dx2 +∂f2∂x2
dx2 ∧ dx2
=
∫ ∫ (
∂f1∂x2
+∂f2∂x1
)
dx1 ∧ dx2
Par consequent, le seul moyen d’annuler cette integrale de surface est (i)que l’integrant, s’il est non nul, puisse changer de signe a l’interieur de lasurface ou (ii) que l’integrant soit nul en tout point. Verifier que l’integrantne s’annule pas et ne change pas de signe garantit donc la non existence d’uncycle limite autour de la surface consideree.
2.6 Impossibilite du chaos planaire
Dans le chapitre introductif, un exemple tridimensionel (trois etats) a eteconstruit exhibant une trajectoire particuliere. Cette trajectoire restait com-prise dans un ensemble ferme et borne (un compact represente par un cube).Elle exhibait de surcroit la particularite de ne jamais passer par le meme point.La trajectoire n’etait donc pas periodique bien qu’un mouvement d’apparencecyclique y etait le theatre. Le prochain theoreme demontre, entre autre, l’im-possibilite qu’un tel phenomene puisse avoir lieu pour des systemes dont l’etatest de dimension 2.

2.7 Exemple : dynamique de populations 25
2.6.1 Theoreme de Poincare-Bendixson
Systeme du second ordre uniquement.
Theoreme 2.13. Si une trajectoire demeure dans une region finie Ω alorsune des trois propositions suivantes est vraie :
1. La trajectoire va vers un equilibre.
2. La trajectoire tend asymptotiquement vers un cycle limite.
3. La trajectoire est elle meme un cycle limite.
La demonstration de ce theoreme est fort interessante. On peut la trouverdans [GH83]. Pour l’illustrer de maniere ludique, il suffit de prendre une plumeet une feuille de papier et de tracer une courbe continue qui ne passe jamaispar le meme point. On aboutira sans trop de difficultes aux consequencesdonnees par le theoreme.
2.7 Exemple : dynamique de populations
Pour illustrer les concepts introduits dans ce chapitre, nous presentonsdeux exemples tres simplifies de dynamique de populations. Nous envisageonsa la fois les modeles mathematiques de deux especes en competition pour uneressource unique, ainsi que la dynamique predateur-proie, ou deux especes dis-tinctes s’affrontent, l’une jouant le role de proie, et l’autre celui de predateur.
Les hypotheses simplificatrices suivantes sont adoptees :
– La densite de l’espece, c.-a-d. le nombre d’individus par unite d’aire, estrepresentee par une variable unique, la difference d’age de sexe et degenotype sont ignores.
– L’effet de surpeuplement affecte le groupe dans son entier. Tous lesmembres de la population sont touches de maniere similaire. Bien quececi soit peu probable lorsque les membres se repartissent en sous-groupes, de telle sorte qu’ils ne soient pas uniformement distribues danstout l’ensemble du territoire considere, nous faisons neanmoins cettehypothese.
– Les effets des interactions au sein de la meme espece et avec des especesdifferentes sont instantanes. Il n’y a pas de delai lors d’action prise parun individu.
– Les facteurs abiotiques environnementaux (c.-a-d. l’influence du non-vivant sur le vivant) sont suffisamment constants.
– La croissance du taux de la population est dependante de la densite,meme lors de tres faibles densites.
– Les femelles trouvent toujours a s’accoupler, meme lorsque la densiteest basse.
Ces hypotheses, tres simplificatrices, se justifient essentiellement par le faitqu’il y aura necessairement un effet limitant par le manque de ressources.

26 2 Diagramme de phase
2.7.1 Competition
Deux populations distinctes sont en competition pour une meme ressourcequi se trouve en quantite limitee. s1 designe la population de la premiereespece et x2 celle de la seconde. Un modele d’evolution differentielle est obtenuen considerant une croissance exponentielle en absence d’effet inhibitif. Deuxcoefficients positifs a1 et a2 sont introduits pour representer les taux de crois-sances instantanes. Les populations agissent alors de maniere independante.
Cependant, les ressources ne sont pas infinies et la presence d’une densitecroissante aura tendance a inhiber la croissance des populations respectives.Ainsi, nous distinguons les coefficients d’auto-inhibition b11 et b22 (deux quan-tites positives, crees par la presence d’un competiteur de meme espece), deceux des coefficients d’inhibition croisee b12 et b21 (egalement deux nombresreels positifs mais dus cette fois-ci a la presence d’un competiteur de l’autreespece). En consequence, nous posons comme modele d’evolution
x1 = x1(a1 − b11x1 − b12x2)
x2 = x2(a2 − b21x1 − b22x2).
Notons, en resolvant x1 = x2 = 0, la presence de plusieurs pointsd’equilibre. Lorsque b11b22 − b12b21 6= 0, il y a quatre points d’equilibre isolesdistincts :
(i) x1 = 0 x2 = 0(ii) x1 = a1
b11x2 = 0
(iii) x1 = a2b12−a1b22b11b22−b12b21 x2 = a1b21−a2b11
b11b22−b12b21(iv) x1 = 0 x2 = a2
b22
Ils correspondent respectivement a (i) l’extinction des deux especes ; (ii)l’extinction de la seconde espece au profit de la premiere ; (iii) la survie desdeux especes en equilibre ; (iv) l’extinction de la premiere au profit de laseconde.
Lorsque b11b22−b12b21 = 0, outre le point d’equilibre a l’origine, la presenced’une droite continue de points d’equilibre est constatee. En effet, en prenantpour valeur numerique a1 = a2 = 2 et b11 = b12 = b21 = b22 = 2, onobtient les deux equations definissant les points d’equilibres 2x1−x1x2−x2
1 =0 et 2x2 − x1x2 − x2
2 = 0. En soustrayant ces deux equations, l’expression(x2 −x1)(x2 +x1 −2) = 0 est obtenue faisant apparaıtre la droite x2 = 2−x1
comme un lieu continu de points d’equilibre.
Le systeme non lineaire x = f(x) peut s’estimer par le premier terme dudeveloppement en serie de Fourier. Ceci donne x = A(x)(x− x) ou x designele point d’equilibre ou l’on developpe f(x). La matrice A s’ecrit

2.7 Exemple : dynamique de populations 27
A =
(
a1 − 2b11x1 − b12x2 −b12x1
−b21x2 a2 − b21x1 − 2b22x2
)
(2.2)
et depend des valeurs x1 et x2 du point d’equilibre.
Fig. 2.11. Plan de phase et points d’equilibre pour deux population en competitionpour une ressource unique. a1 = a2 = 2 et b11 = b22 = 1. Dans les trois cas, l’origineun foyer instable. A gauche, (i) b12 = b21 = 2. L’inhibition croisee est plus grande quel’auto-inhibition et cela conduit une population a survivre au detriment de l’autre ; lapopulation survivante depend des conditions initiales et les densites convergent soitvers (2 0)T ou (0 2)T . Le point d’equilibre central (2/3 2/3)T est un point selle.Au centre, (ii) b12 = b21 = 1. L’inhibition croisee est identique a l’auto-inhibition,ce qui conduit les deux populations a vivre avec des rapport qui dependent desconditions initiales. A droite, (iii) b12 = b21 = 1
2. L’auto-inhibition est plus grande
que l’inhibition croisee, et les deux populations finissent au point d’equilibre ( 43
43)
pour presque toutes les conditions initiales.
Le plan de phase est represente a la figure 2.11 pour trois choix de valeursnumeriques. Les facteurs de croissance sont fixes a a1 = a2 = 2.
Dans le premier cas, les facteurs inhibitifs croises sont plus importantsque les facteurs auto-inhibitifs (b11 = b22 = 1 et b12 = b22 = 2). Le pointd’equilibre (0 0)T est localement instable puisque les valeurs propres de lamatrice A sont toutes deux egales a +2. Les points d’equilibres (2 0)T et(0 2)T sont des points stables (les valeurs propres sont toutes deux egalesa −2). Le point d’equilibre (2
323 )T est un point selle dont une des valeurs
propres vaut −2 et l’autre + 23 . Ainsi, trois points d’equilibre d’index +1 et
un d’index −1 sont obtenus, pour donner un index global de +2. L’indexglobal s’obtient en considerant une courbe fermee quelconque englobant tousles points d’equilibre.
Dans le second cas, lorsque l’auto-inhibition est identique a l’inhibitioncroisee, on constate une vie mutuelle des deux especes et une convergencevers des points d’equilibre qui depend des conditions initiales.
Dans le troisieme cas, c.-a-d. lorsque l’inhibition croisee est moins forteque l’auto-inhibition, il y a egalement une survie mutuelle des deux especes,

28 2 Diagramme de phase
mais toujours avec la meme densite. Le point d’equilibre (43
43 )T est stable
avec pour valeur propre de la matrice A, −2 et − 23 . Le point d’equilibre
(0 0)T est instable (les valeurs propres de A sont toutes deux egales a +2).Les deux points d’equilibres restants (0 2)T et (2 0)T sont des points sellesavec comme valeurs propres −2 et +1.
Il est interessant de constater que le passage de l’index global +2 a celuide 0 c’est fait par l’intermediaire de l’apparition d’un lieu continu de pointsd’equilibre.
On constate egalement qu’il n’y a pas de cycle limite.
2.7.2 Predateur-proie
Dans ce modele, x1 represente la densite de population des proies, et x2
celle des predateurs.
L’equation de l’evolution de x1 est identique au cas des populations encompetition de la section precedente. En effet, les proies croissent de maniereexponentielle en l’absence de predateur (coefficient a1 positif). Leur croissanceest limitee par les ressources (effet auto-inhibitif, b11) et par la presence depredateurs (effet d’inhibition croise, b12).
Par contre, l’evolution des predateurs x2 est foncierement differente. Enl’absence de proie, les predateurs disparaissent progressivement de maniereexponentielle, et le signe devant le coeffcient a2 est cette fois-ci negatif. Deplus, la presence des proies n’a pas un effet inhibitif, mais bien au contraire,un effet de croissance : le signe devant le facteur b21 est positif. Il n’y a pasd’effet auto-inhibitif ce qui implique l’annulation du coefficient b22 = 0.
Sous ses hypotheses, les deux equations differentielles qui gouvernentl’evolution des populations sont :
x1 = x1(a1 − b11x1 − b12x2)
x2 = x2(−a2 + b21x1)
Ce systeme comporte trois points d’equilibre :
(i) x1 = 0 x2 = 0(ii) x1 = a1
b11x2 = 0
(iii) x1 = a2
b21x2 = a1b21−a2b11
b12b21
Le premier point d’equilibre est l’extinction mutuelle des deux especes.Le second correspond uniquement a la survie des proies ; il y a absence depredateurs. Le troisieme correspond a une survie mutuelle.
Lorsque a1b21 < a2b11, les predateurs meurent par manque de facteur dereproduction des proies (coefficient a1) par rapport au besoin de nourrituredes predateur (coefficient a2). La condition de survie mutuelle pondere les

2.7 Exemple : dynamique de populations 29
deux facteurs a1 et a2 par la qualite de satisfaction energetique de la proiepour un predateur b21 et du taux d’auto-inhibition des proies b11. En effet,l’auto-inhibition des proies rend la reproduction et la survie des predateursdifficiles.
La figure 2.12 represente le plan de phase pour les valeurs numeriques
a1 = a2 = b21 = 2, b11 = b12 = 1.
Deux courbes solution de l’equation differentielle sont egalement representees,une pour la condition initiale x1(0) = x2(0) = 0.2 et une autre pour la condi-tion initiale x1(0) = 1.7 et x2(0) = 1.4. On constate que dans les deux cas, lasolution correspondante converge vers le point d’equilibre de survie mutuellex1 = x2 = 1.
Pour la premiere courbe, la densite des predateurs commence legerementa diminuer puis demeure relativement modeste a cause du faible nombre deproies disponibles. Toutefois, ces dernieres se reproduisent en presence de lafaible densite des predateurs. Lorsqu’une taille critique est atteinte, a partirde laquelle les predateurs peuvent mieux se developper, la tendance s’inverse,et les predateurs augmentent au detriment des proies.
De maniere generale, le taux de predateurs par rapport a celui des proiesoscille jusqu’a atteindre l’equilibre de survie mutuelle.
Fig. 2.12. Plan de phase et points d’equilibre pour le modele predateur-proie.La variable x1 represente la densite des proies (axe horizontal) et la variable x2
represente la densite des predateurs (axe vertical). Les valeurs numeriques choisiessont a1 = a2 = 2 = b21 = 2 et b11 = b12 = 1. Deux trajectoires sont egalementrepresentees pour x1(0) = x2(0) = 0.2 et pour x1(0) = 1.7, x2(0) = 1.4. Trois pointsd’equilibre sont constates : (i) l’origine x1 = x2 = 0 (en bas, a gauche), (ii) lasurvie des proies et l’extinction des predateurs x1 = 2, x2 = 0 (en bas, a droite), etfinalement (iii) la survie mutuelle x1 = x2 = 1 (au centre).

30 2 Diagramme de phase
Exercice
2.1. Saturation et systeme lineaire. Soit le systeme lineaire
x1 = x1 + u
x2 = −x2 + u
avec u = sat(v), ou
sat v
1 v > 1v −1 ≤ v ≤ 1−1 v < −1
. (2.3)
On applique egalement un bouclage stabilisant
v = −k1x1 − k2x2.
(i) Choisir les gains afin d’avoir deux pole en −1 et −1 dans la partielineaire.
(ii) Trouver tous les points d’equilibre.
(iii) Dessiner le plan de phase avec le champ de vecteur associe. Tracerplusieurs trajectoires pour differentes conditions initiales (il faut simuler lesequations differentielles).
(iv) Determiner la nature du bassin d’attraction en simulant le systemeen temps retrograde, i.e. x1 = −x1 − u et x2 = +x2 − u, la commande udemeurant identique. Il faut prendre plusieurs conditions initiales repartiessur un petit cercle centre sur l’origine.
(v) Repeter l’operation en (iv) en changeant la position des poles, en lesralentissant (p. ex − 1
2 et − 12 ) et en les rendant plus rapides (p. ex. −2 et −2).
(vi) Est-ce que la position des points d’equilibre joue-t-il un role ?

3
Methode du premier harmonique
Dans les deux precedents chapitres, un systeme etait donne par un en-semble d’equations differentielles ordinaires de la forme x = f(x). Certaines deses caracteristiques comme la presence de plusieurs points d’equilibre, l’exis-tence de cycles limites ou d’orbites chaotiques ont ete presentees, ainsi que descriteres permettant de determiner de telles proprietes (theoreme de l’index,critere de Poincare-Bendixson, etc.).
Toutefois, la notion de systeme en boucle fermee n’a pas ete mentionneede maniere explicite. En effet, x = f(x) pouvait a la fois representer unsysteme en tant que tel, ou provenir de l’association en boucle fermee de deuxsystemes interconnectes entre eux. Par exemple, w = g1(w, u) et z = g2(z)avec dim u = dim z donnent lieu lorsque u = z a un systeme x = f(x) avec
x =(
wT zT)T
.
Nous allons rendre ainsi la presence d’une telle configuration en bouclefermee plus explicite dans le cours du present chapitre. L’objectif etant d’expo-ser une methode d’analyse approximative d’une classe relativement restreintede systemes, mais apparaissant tres frequemment en pratique.
Il s’agit de la combinaison en retroaction d’un systeme lineaire ayant uneseule entree et une seule sortie, boucle par un element non lineaire. Ce dernierelement ne possede pas de dynamique et correspond a une fonction statiquearbitraire.
L’importance de cette classe de systeme provient du fait, qu’en pratique,beaucoup de systemes possedent des imprfections qui ne disparaissent pasapres linearisation locale. De telles imperfections proviennent par exempled’une zone morte pour certains systemes mecaniques, d’hysterese pour lespiezoelectriques et les materiaux magnetiques, ainsi que la saturation pourpresque tous les types d’actioneurs.
En effet, on ne peut pas a proprement parler eliminer un jeu dans unengrenage, si ce n’est recourir a le changer ou a le reparer. Tout au plus, nous

32 3 Methode du premier harmonique
pouvons esperer compenser son effet nefaste par la maniere dont le systemecomportant cet element est commande.
De plus, de tels phenomenes ont la particularite de pouvoir se separer entreun effet non-lineaire purement statique (le jeu et la saturation, par exemple,font intervernir leur effet de maniere instantanee sans phenomene de memoire)et un effet dynamique propre au systeme dans son ensemble (par exemple, lesinerties et les frottements d’un reducteur comportant le jeu susmentionneconstituent alors la partie lineaire du modele du systeme).
Ainsi, bien que la majeure partie du systeme se comporte de manierelineaire, il peut y avoir une non-linearite statique qui subsiste. Celle-ci peutetre isolee du reste du comportement lineaire pour aboutir au schema que l’onva analyser.
L’objectif de cette analyse est de detecter et caracteriser la presenced’eventuels cycles limites. Il s’agit de determiner a la fois la propriete dese maintenir apres une legere perturbation (stabilite) et de trouver les pa-rametres representatifs tels que l’amplitude et la frequence du cycle limite.
3.1 Systeme lineaire et non-linearite statique
Considerons la mise en serie, en boucle ouverte, d’un premier bloc, dontle comportement est non-lineaire, et d’une simple fonction de transfert quiconstitue le second bloc (Figure 3.1).
Chacun des blocs comporte une entree unique et une sortie unique. L’entreede la non-linearite est notee u et sa sortie y. L’entree de la fonction de tranfertest alors y (attention a ne pas confondre avec u) et sa sortie est z. Il estimportant d’insister sur cette convention.
u y zN.L. G(s)
Fig. 3.1. Association d’un bloc non-lineaire statique N.L. et d’une fonction detransfert G(s).
La non-linearite du premier bloc est clairement separee du comportementlineaire de la fonction de transfert. La contre-reaction du second bloc sur lepremier est momentanement absente. Nous etudierons les consequences de laboucle fermee (u = −z) ulterieurement.

3.1 Systeme lineaire et non-linearite statique 33
De plus, nous ne considererons qu’une relation non-lineaire statique dupremier bloc. Ainsi, a chaque instant t, la sortie y(t) est une simple fonctionde son entree u(t), c.-a-d.
y(t) = φ(u(t)).
Il y a donc absence d’etat pour le comportement du premier bloc. Les etatsne sont necessaires que pour realiser la fonction de transfert.
3.1.1 Excitation sinusoıdale en boucle ouverte
Pour illustrer le principe, une saturation constituera le premier bloc. Lacombinaison en serie des deux blocs est soumise a une excitation sinusoıdaled’amplitude A et de pulsation ω :
u(t) = A sin(ωt) (3.1)
La saturation est decrite par la fonction
φ(u(t)) =
ka u(t) > aku(t) −a ≤ u(t) ≤ a−ka u(t) < −a
(3.2)
ou k definit le gain de la partie non-saturee et le parametre a correspond ala valeur d’entree a partir de laquelle la saturation est active. La figure 3.2illustre le phenomene pour un choix particulier des parametres.
-4
-2
0
2
4
u(t)
-4
-2
0
2
4
y(t)
Fig. 3.2. Representation graphique de l’entree u(t) et de la sortie y(t) de la satu-ration pour les valeurs A = 2, ω = 5, k = 2 et a = 1.
3.1.2 Caracteristique passe-bas du systeme lineaire G(s)
En examinant la figure 3.2, nous constatons que le signal sinusoıdal estfortement transforme par la saturation. Il ne correspond plus a une courbe

34 3 Methode du premier harmonique
lisse et de meme nature que la sinusoıde de depart. Il n’est pas possible desuperposer une seule sinusoıde, meme lorsque celle-ci est dephasee et amoidriede facteurs appropries.
Par contre, le constat peut etre different a la sortie du systeme G(s),puisque ce dernier agit comme un filtre supplementaire.
Par exemple, considerons un systeme G(s) du second ordre avec un pa-rametre b unique permettant de determiner sa bande passante. Son gain sta-tique est fixe egal a l’unite. Le parametre b correspond a la valeur reelle ou setrouve la paire de poles sur l’axe reel negatif.
G(s) =b2
s2 + 2bs+ b2(3.3)
Le systeme est stable pour autant que b soit strictement positif. Un gandb determine un systeme rapide qui filtre peu, et un petit b correspond a unsysteme de nature passe-bas qui filtre les hautes frequences. La figure 3.3illustre le resultat du filtrage lorsque b = 3 et b = 30.
-4
-2
0
2
4
z(t)
-4
-2
0
2
4
z(t)
Fig. 3.3. Representation graphique de la sortie du systeme lineaire lorsque A = 2,ω = 5, k = 2 et a = 1 pour deux valeurs du parametre b de la fonction de transfert(3.3). A gauche b = 3 et a droitre b = 30.
Dans les deux cas, un regime transitoire est constate. Celui-ci decouledu fait que les conditions initiales de G(s) ne sont pas compatibles avec leregime force que tend a imposer l’entree u(t). Ce regime transitoire disparaıtrapidement pour laisser place a un regime force de nature differente en fonctionde la valeur de b.
Lorsque le systeme filtre peu (b = 30), le signal z(t) est tres proche de lasortie de la non-linearite y(t). Par contre, en examinant le premier resultat
(b = 3), l’effet conjoint de la saturation φ et du systeme lineaire G(s) revientsimplement a dephaser et a attenuer la sinusoıde d’origine, un peu commele ferait un systeme lineaire. La non-linearite a en quelque sorte disparu, ou

3.1 Systeme lineaire et non-linearite statique 35
de maniere plus rigoureuse, elle a ete englobee pour constituer avec G(s) unesorte de nouvelle fonction de transfert.
3.1.3 Gain complexe equivalent
Pardoxalement, nous avions initialement clairement separe le comporte-ment non lineaire du comportement lineaire, et voila que le dernier resultatde la section precedente revient a simplement dephaser et amoindrir le signald’origine.
Le comportement global de la mise en serie des deux elements montrequ’il est peu commode de le separer en une partie purement non-lineaire ca-racterisable et une partie lineaire. En effet, il n’est pas aise en examinant lesignal z(t) (b = 3) de detecter la presence d’une saturation.
Cependant, il est possible de substituer a la non-linearite, un nombre com-plexe N , permettant de caracteriser celle-ci sans perdre trop de qualite dansla reponse z(t). Ceci est rendu possible par la nature passe-bas du systemelineaire. Clairement, z(t) pour b = 30 ne permet pas une telle simplification.En consequence, lorsque le systeme lineaire possede des proprietes passe-basmarquees, le schema de la figure 3.1 peut etre remplace par l’approximationrepresentee a la figure 3.4.
u y zN G(s)
Fig. 3.4. La non-linearite statique N.L. est remplacee par un gain equivalent com-plexe N .
Pour determiner le gain N , nous procedons par essais/erreurs et il estrelativement aise de trouver la sinusoıde
0.329A sin(ωt− 2.00)
qui se superpose tres bien avec le signal z(t). Ceci est represente a la figure3.5.
Cette determination repose sur le caractere du regime permanent si-nusoıdal. Le signal d’excitation est multiplie par N puis par G(jω) avec ω = 5.Pour determiner N , il suffit donc de diviser la representation frequentielle dela sortie par G(j5) et ensuite de comparer le resultat avec le signal d’entree.Une maniere similaire de proceder est de dephaser et d’amplifier les signaux

36 3 Methode du premier harmonique
-4
-2
0
2
4
z(t)
Fig. 3.5. Representation graphique de la sortie du systeme lineaire lorsque A = 2,ω = 5, k = 2, a = 1 et b = 3. Une sinusoıde 0.329A sin(ωt− 2.00) y est superposee.
temporels par respectivement la phase et l’amplitude des nombre complexescorrespondants.
On deduit sans peine que N ≈ 1.2. C’est un nombre purement reel. Ledephasage est donc cause exclusivement par G(j5) = 9(30j − 14)−1.
Il est important a ce stade d’insister sur le fait que le gain N dependen general de l’amplitude et de la pulsation ω du signal d’entree. C’est laque reside la difference essentielle entre un comportement purement lineaire(representable par une fonction de transfert a part entiere) et l’approximationde la non-linearite par un gain equivalent N .
En prenant une autre amplitude pour le signal d’entree, nous aurionstrouve une autre valeur pour le gain N . C’est la raison pour laquelle il estnote soit N(A) ou N(A,ω), selon son type de dependance.
Ceci n’est pas surprenant pour la saturation par exemple, car lorsque l’am-plitude du signal est faible, de telle sorte que la saturation n’est pas active, lesignal de sortie est amplifie par le gain k de la saturation. Par contre, lorsquele signal est tres grand, il est fortement limite par la saturation, et le gainequivalent peut devenir bien inferieur a l’unite.
Il faut egalement faire attention a ne pas confondre le parametre d’ampli-tude A et la valeur instantanee u(t) du signal a l’entree de l’element approximepar N(A). Ce sont deux choses differentes. L’amplitude A correspond a la va-leur maximale d’une sinusoıde unique pouvant etre appliquee a l’entree de lanon-linearite, auquel cas cette meme entree sera amplifiee d’un facteur N(A)ou A est l’amplitude fixe de la sinusoıde A sin(ωt). Ce n’est pas la valeur deA sin(ωt) a un instant t donne. C’est la raison pour laquelle lorsque le signaln’est pas proche d’une sinusoıde unique (de pulsation ω), il est difficile dedonner une interpretation a A, et de surcroit a N(A).

3.2 Premier harmonique 37
3.2 Premier harmonique
Il est fastidieux de determiner le nombre complexe N en fonction des deuxparametres A et ω par une succession de simulations du type que nous avonsexpose a la section precedente. Il est plus efficace de trouver une expressionanalytique du gain equivalent N(A,ω).
3.2.1 Decomposition en harmoniques
Comme la non-linearite est depourvue de dynamique, lorsque le signal
u(t) = A sin(ωt)
est applique a l’entree de la non-linearite statique φ, le signal a la sortie dela non-linarite y(t) est periodique et de meme periode T = 2π
ω que le signald’entree. Ceci implique que le signal de sortie y(t) puisse etre decompose enserie de Fourier :
y(t) =a0
2+
∞∑
l=1
[al cos(lωt) + bl sin(lωt)] (3.4)
a0 =1
π
∫ π
−πy(t)d(ωt) (3.5)
al =1
π
∫ π
−πy(t) cos(lωt)d(ωt) (3.6)
bl =1
π
∫ π
−πy(t) sin(lωt)d(ωt) (3.7)
La serie (3.4) donne une decomposition exacte de y(t). Les coeffcients a0,al, bl, (l = 1, . . . ,∞) caracterisent alors le type de non-linearite φ.
Le seul incovenient de cette decomposition (et non le moindre) est qu’ilnecessite une infinite d’evaluations d’integrales le long d’une periode. En effet,les coefficients al et bl doivent etre determines d’une maniere ou d’une autreen utilisant les definitions (3.6) et (3.7).
Il est important d’insister a nouveau sur le fait que chaque coefficienta0, al et bl depend de l’amplitude A et de la pulsation ω. Formellement, ondevrait ecrire a0(A,ω), al(A,ω) et bl(A,ω), les integrales (3.5), (3.6) et (3.7)conduisant alors a une formule respective. Nous n’insisterons pas sur cetteprecision de notation, sauf lorsque cela est vraiement indispensable.
3.2.2 Equivalent du premier harmonique
Bien que tous les termes de la serie soient necessaires pour representerexactement la sortie y(t), ceux associes aux hautes harmoniques n’ont pas

38 3 Methode du premier harmonique
beucoup d’impact sur la sortie z(t) de la fonction de transfert G(s), etantdonne le caractere passe-bas de cette derniere. Il est par consequent possiblede tronquer la serie et de ne retenir que quelques termes.
Puisque a0, a1 et b1 sont suffisants pour definir un nombre complexe, nousretenons de la serie (3.4) que le terme constant et ceux associes a la fonda-mentale. Ceci constitue l’approximation du premier harmonique cherchee etpermet de determiner le gain equivalent N .
En effet, en approximant
y(t) ≈ a0 + a1 cos(ωt) + b1 sin(ωt) = a0 +M sin(ωt+ α),
l’amplitude M et la phase α s’obtiennent a partir des coefficient a1 et b1 par
M =√
a21 + b21
α(A,ω) = arctan(a1/b1).
Ainsi, lorsque la non-linearite est parfaitement symetrique, a0 = 0, et le gainequivalent s’exprime comme
N(A,ω) = Mejωt+α
Aejωt=M
Aejα =
1
A(b1 + ja1). (3.8)
3.2.3 Calcul de l’equivalent du premier harmonique
Certes, la troncation de la serie de Fourier fournit une maniere eleganted’exprimer le gain equivalent a partir des parametres a0, a1 et b1 (formule(3.8) dans le cas symetrique). Il reste toutefois a determiner une procedure decalcul permettant d’evaluer les integrales
a0 =1
π
∫ π
−πy(t)d(ωt) (3.9)
a1 =1
π
∫ π
−πy(t) cos(ωt)d(ωt) (3.10)
b1 =1
π
∫ π
−πy(t) sin(ωt)d(ωt), (3.11)
a partir desquelles seront issues les formules explicites des deux parametres Aet ω.
Deux methodes sont presentees ci-apres pour une telle evaluation. Lapremiere est un calcul analytique et la seconde repose sur des techniquesnumeriques.
Integration analytique
La methode la plus directe consiste a calculer analytiquement les integralesexprimant les coefficients a0, a1 et b1.

3.2 Premier harmonique 39
Le cas de la saturation est traite dans son integralite. Nous donnerons ala section suivante d’autres types de non-linearites avec les gains equivalentsrespectifs.
En reprenant l’expression φ de la saturation (3.2), la sortie y(t) est ex-primee en fonction de l’entree u(t) = A sin(ωt). Cependant, une differencefondamentale entre le cas ou l’amplitude A est inferieure a a (absence desaturation), et lorsque celle-ci est superieure a a, existe.
Lorsque A > a, la sortie se decompose en une partie non saturee et en unepartie saturee. En ne considerant qu’un quart de periode (0 ≤ ωt ≤ π
2 , lesautres quarts se deduisant par symetrie), nous pouvons exprimer
A ≤ a y(t) = kA sin(ωt)
A > a y(t) =
kA sinωt 0 ≤ ωt ≤ γka γ < ωt ≤ π
2
γ = arcsin(a/A)
ou γ est une variable temporaire definissant l’angle a partir duquel la satura-tion commence a faire son effet.
Etant donne que la saturation est symetrique, c.-a-d. φ(−u) = φ(u), ondeduit que a0 = 1
π
∫ π
−π y(t)d(ωt) = 0 (absence de composante continue).D’autre part, et egalement par raison de symetrie, la premiere demi-periodecompense la seconde dans (3.10) de telle sorte que a1 = 0. Par contre, b1est different de zero, et seul le deuxieme cas A > a, necessite une attentionparticuliere. Sur un quart de periode, l’identite
1
π
∫ γ
0
A sin2(ωt)dωt+1
π
∫ π2
γ
ka sin(ωt)dωt =kA
2π
[
γ +a
A
√
1 − a2
A2
]
est valable et, apres multiplication par quatre (pour tenir compte de lasymetrie des quarts de periodes mentionnee precedemment), on deduit le gainequivalent
N(A) =
k A ≤ a
2kπ
[
arcsin(
aA
)
+ aA
√
1 − a2
A2
]
A > a.
En reportant les valeurs numeriques A = 2, k = 2 et a = 1, nous obte-nons N(A) = 1.218, justifiant ainsi, par des moyens analytiques, les resultatsempiriques de la section 3.1.
De plus, en representant le gain equivalent sous forme graphique a la figure3.6, la constation de la fin de cette section, a savoir la diminution du gainequivalent lorsque l’amplitude du signal d’entree augmente, est egalementconfirmee.

40 3 Methode du premier harmonique
5 10 15 20 25 30
0.5
1
1.5
2
k = 2, a = 1 Aa
Fig. 3.6. Gain equivalent purement reel de la saturation. Il diminue en fonction del’amplitude.
Integration numerique
Les trois integrales (3.5), (3.10) et (3.11) peuvent etre evaluees apresdiscretisation du signal temporel y(t) de t = −π
ω a t = πω en une suite fi-
nie de n points y( 1ω (−π+2π kn )), k = 0 . . . n−1. Afin de simplifier la notation,
nous introduisons
yk = y(1
ω(−π + 2π
k
n)).
Ceci permet d’approximer les coefficients a0, a1 et b1 par
a0 ≈ a0,n =2
n
n−1∑
k=0
yk (3.12)
a1 ≈ a1,n =2
n
n−1∑
k=0
yk cos(−π + 2πk
n) (3.13)
b1 ≈ b1,n =2
n
n−1∑
k=0
yk sin(−π + 2πk
n) (3.14)
et nous avons une convergence de a0,n, a1,n et b1,n vers respectivement a0, a1
et b1 lorsque n → ∞. Comme a0,n est une moyenne, elle ne necessite qu’uneseule multiplication et n− 1 additions. Par contre, le cout en multiplicationsest important pour a1,n et b1,n.
En ecrivant
N =1
Aj(a1,n − jb1,n) = − 2j
An
n−1∑
k=0
yke−j2π k
n (3.15)
nous constatons qu’une seule serie complexe finie est necessaire. Cette pro-priete peut donc etre exploitee pour reduire le nombre d’operation. De plus,l’expresssion de N est une approximation du gain equivalent N qui s’ob-tient par tranformee Fourier discrete du signal echantillonne y( 1
ω (−π+2π kn )),k = 0 . . . n− 1.

3.2 Premier harmonique 41
En effet, (3.15) exprime l’approximation du gain equivalent par le premierterme de la transformee de Fourier discrete multiplie par − 2j
An . Notons quecette transformee peut etre obtenue par un algorithme de transformation deFourier rapide en choisissant un nombre de points d’echantillonnage egal aune puissance entiere de 2, c.-a-d. n = 2m avec m ∈ N.
Cependant, un tel algorithme fournit trop d’information etant donne queles harmoniques superieures sont simplement ignorees. Il est neanmoins pos-sible de reduire substantiellement le nombre de multiplications apparais-sant dans (3.13) et (3.14) en utilisant les symetries des points complexes
e−j2πkn . Le concept est d’abord presente en considerant le cas particulier d’un
echantillonnage de 8 = 23 points. La formule (3.15) devient
j4N = y0 + y1e−j2π 1
8 + y2e−j2π 2
8 + y3e−j3π 3
8
+y4e−j2π 4
8 + y5e−j2π 5
8 + y6e−j2π 6
8 + y7e−j2π 7
8 (3.16)
En utilisant le fait que pour chaque point complexe e−jα, il existe un pointcomplexe e−jα−jπ de signe contraire, nous pouvons regrouper des termes detelle sorte que le membre de droite de (3.16) s’ecrit
(y0 − y4) + (y1 − y5)e−j π
4 + (y2 − y6)e−j π
2 + (y3 − y7)e−j 3π
4 . (3.17)
Le nombre de multiplications est ainsi reduit d’un facteur de deux. En utilisantle symetrie d’un quart de tour (−j = e−j
π2 ), (3.17) devient
(y0 − y4) − j(y2 − y6) + [(y1 − y5) − j(y3 − y7)]e−j π
4 . (3.18)
En recourant, d’une part a l’isomorphisme (note ∼=) des nombres complexes
avec les points d’un plan a + jb ∼=(
a b)T
, ainsi qu’a la propriete que
cos(
−π4
)
= sin(
−π4
)
= −√
22 , l’expression (3.18) prend la forme
(
y0 − y4y2 − y6
)
−√
2
2
(
1 −11 1
)(
y1 − y5y3 − y7
)
, (3.19)
et nous avons grandement simplifie le resultat par rapport aux formules brutesa1,8 et b1,8 donnees par (3.13) et (3.14) (n = 8) a partir desquel N = 1
A (b1,8 +ja2,8) etait directement exprimable. Etant donne que la methode presenteeest une methode approximative, il est egalement possible d’estimer
√2
2≈ 5
7
avec une erreur de 7.17 10−3.
En general, la matrice de rotation correspondant a e−j2πn ne peut pas se
mettre sous une forme aussi elegante qu’en (3.19), mais la premiere partie dessimplifications est applicable. Par consequent, a partir de (3.15), nous avons

42 3 Methode du premier harmonique
N = − 2j
An
n/2−1∑
k=0
(yk − yk+ n2)e−j2π
kn
=2
An
n/4−1∑
k=0
(yk − yk+ n2
+ yn2−k − yn−k) sin(2π
k
n)
− 2j
An
n/4−1∑
k=0
(yk − yk+ n2− yn
2−k + yn−k) cos(2π
k
n),
et le nombre de multiplications est reduit d’un facteur quatre.
De plus, le nombre d’evaluations des sinus et consinus peut encore etrediminue de moitie afin d’utiliser uniquement sin(2π kn ) et cos(2π kn ) pour k =1, . . . , n4 − 1. Il suffit de recourir aux deux proprietes cos(α) = sin(π2 − α)et sin(α) = cos(π2 − α) valables pour 0 > α > π
2 . Cependant le nombre demultiplications, en tant que tel, ne peut pas etre reduit d’avantage en utilisantles symetries du cercle unite qui conservent l’axe des ordonnees et l’axe desabscisses.
Mis a part le gain en nombre d’operations, le resultat precedent montreque les echantillons sont redondants en ce qui concerne leur impact sur leprermier harmonique. Certains situes loin les uns des autres se regroupent enclasse d’equivalence selon leur apparition devant la fonction de base sin(2π kn )
ou cos(2π kn ), k = 0, . . . , n4 − 1.
3.3 Non-linearites communes
Dans cette section, nous presentons les resultats du calcul analytique dequatres non-linearites communes. Ces resultats sont presentes sous formecondensee, car ils s’obtiennent aisement a partir de la saturation. En effet,par sommation entre une saturation et un gain dont les signes et les valeurssont convenablement choisis, toutes les non-linearites de cette section sontexprimables.
Nous reportons, pour commencer, les resultats associes a la saturation, parsoucis de completude.

3.3 Non-linearites communes 43
3.3.1 Saturation
La saturation correspond a une modelisation de la limitation de beaucoupd’actionneur. Tant que l’actionneur opere dans sa plage de fonctionnement,sa sortie y(t) est proportionnelle a la valeur desiree de sa sortie u(t), c.-a-d. y(t) = ku(t). Par contre, si la valeur desiree est irrealisable (u(t) > a parexemple), l’actionneur ne peut que fournir le maximum possible (u(t) = ka) etil n’y a plus de proportionnalite entre la grandeur desiree et la sortie effective.
Symbole et fonction φ
φ(u(t)) =
ka u(t) > aku(t) −a ≤ u(t) ≤ a−ka u(t) < −a
(3.20)
Gain equivalent N(A)
N(A) =
k A ≤ a
2kπ
[
arcsin(
aA
)
+ aA
√
1 − a2
A2
]
A > a
Graphique
5 10 15 20 25 30
0.5
1
1.5
2
k = 2, a = 1 Aa
Fig. 3.7. Gain equivalent purement reel de la saturation. Il diminue en fonction del’amplitude.

44 3 Methode du premier harmonique
3.3.2 Zone morte
La zone morte correspond a la perte de transmission entre la grandeurd’entree u(t) et celle de la sortie y(t) pour des valeurs proches de zero. Ainsi,tant que la grandeur desiree n’a pas atteint un seuil δ, la grandeur de sortie y(t)est nulle. Des que la grandeur d’entree depasse ce seuil, la sortie corresponda la difference entre l’entree et le seuil multiplie par un gain k.
Symbole et fonction φ
La fonction φ correspondant a la zone morte est notee φ :
φ(u(t)) =
k(u(t) − δ) u(t) > δ0 −δ ≤ u(t) ≤ δ
−k(u(t) + δ) u(t) < −δ(3.21)
Gain equivalent
Pour obtenir le gain equivalent de la zone morte, il suffit de remarquer quecelle-ci peut se fabriquer tres facilement a partir d’une saturation. En effet, enposant a = δ et en designant la fonction de la saturation par φ et celle de lazone morte par φ, un montage sommateur entre un gain k et l’oppose d’unesaturation donne la zone morte, autrement dit φ = k − φ, et ainsi
N(A) =
0 A ≤ δ
2kπ
(
π2 − arcsin( δA ) − δ
A
√
1 − δ2
A2
)
A > δ
Reciproquement, il est facile de construire une saturation a partir d’unezone morte, car une fois pose δ = a, la saturation s’exprime comme φ = k− φ.
Graphique
2 4 6 8 10 12 14
0.5
1
1.5
k = 2, δ = 1A
Fig. 3.8. Gain equivalent purement reel de la zone morte. Il augmente en fonctionde l’amplitude.

3.3 Non-linearites communes 45
3.3.3 Relais
Le relais correspond a la commutation tout ou rien en fonction du signede la valeur d’entree. Lorsque celle-ci est positive, la sortie du relais prend lavaleur fixe +M . Elle prend la valeur contraire pour des valeurs negatives del’entree.
Symbole et fonction φ
Nous noterons la fonction φ associee au relais par φ.
φ(u(t)) =
+M u(t) > 00 u(t) = 0
−M u(t) < 0(3.22)
Gain equivalent N(A)
Pour calculer le gain equivalent, il suffit de remarquer que la fonction φpeut etre exprimer a partir de celle la saturation φ, en posant k = a
M , et enpassant a la limite lima→0. Ainsi
φ(u(t)) = lima→0
φ(a, k =a
M, u(t)),
et donc en utilisant le fait que sin(x) = x+o(x) (c.-a-d. arcsin(x) = 1/x+o(x))
N(A) =4M
πA
3.3.4 Hysterese
L’hysterese peut modeliser une transmission comportant deux engrenages.Lorsqu’un premier engrenage commence a tourner, durant un angle de δ,il n’y a pas d’effet sur la rotation du second engrenage. Un fois cet angleparcouru, le seond engrenage commence a tourner et il tourne alors d’unangle correspondant a celui du premier. Lorsque le mouvement est inverse, ilest necessaire au premier engrenage de parcourir un difference d’angle de 2δdans le sens inverse sans qu’il y ait d’effet sur le second engrenage. Ce derniercommence alors a tourner dans le sens contraire.

46 3 Methode du premier harmonique
a1 =4kb
π(b
A− 1)
b1 =Ak
π
π
2− arcsin
(
2b
A− 1
)
−(
2b
A− 1
)
√
1 −(
2b
A− 1
)2
‖N(A)‖ =1
A
√
a21 + b21
arg(N(A)) = arctan
(
a1
b1
)
3.3.5 Non-linearites symetriques, continues par morceaux
Nous avons vu que la saturation permet de synthetiser une zone morte etun relais. En outre, comme nous allons le voir dans cette section, elle peutegalement fabriquer un ensemble tres grand de non-linearites statiques.
Nous allons montrer comment, a partir de zones mortes (et donc a l’aidede saturations), il est possible de constituer n’importe quelle non-linearitestatique symetrique constante par morceaux, par simple principe de super-position (c.-a-d. en utilisant des sommes et des multiplications par des gainsconstants). La figure 3.9 illustre le principe.
-10 10
-40
-20
0
20
40
u
φ3
φ2
φ1
φ4φ(u)
Fig. 3.9. Le trait en solide represente une non-linearite statique symetrique, etcontinue par morceaux. Elle est egale a la somme des quatres zones mortes φ1,φ2, φ3, et φ4, avec δ1 < δ2 < δ3 < δ4. Les zones mortes sont representees entraits hachures. La non-linearite peut donc s’exprimer comme une combinaison desaturations φi avec des parametres ai et ki judicieusements choisis.
Comme la non-linearite est symetrique, il suffit de considerer le cas u ≥ 0.φ est alors determine par des valeurs en un nombre fini m de points. Soitu1 < u2 < u3 < . . . < um, les valeurs de u pour lesquelles φ vaut φ1 = φ(u1),φ2 = φ(u2), . . ., φm = φ(um), avec φi ∈ R, i = 1, . . . ,m.

3.4 Systeme en retroaction 47
Ceci etant donne, nous pouvons exprimer φ a l’aide de φi(ki, δi). Pourtrouver ces expressions, il suffit de fixer
δi = ui, i = 1. . . . ,m
et de constater que les zones mortes i, i+ 1, . . ., m n’influencent pas le com-portement pour u ∈ [0;ui[. Les gains ki s’expriment donc inductivement par
ki =φ(ui+1) − φ(ui) −
∑i−1l=1
(
∑ln=1 kn
)
ul
ui+1 − ui
Comme a travers cette construction
φ =
m∑
i=1
φ(ki, δi),
le gain equivalent de la fonction φ s’ecrit alors par superposition des gainsequivalents des zones mortes respectives
N(A) =2
π
m∑
i=1
kiǫ(A− δi)
(
π
2− arcsin(
δiA
) − δiA
√
1 − δ2iA2
)
,
ou ǫ(.) designe la fonction (de R dans R) x→ ǫ(x) qui vaut +1 lorsque x > 0et 0 sinon.
3.4 Systeme en retroaction
Jusqu’a present, nous n’avons pas considere le systeme en boucle fermee.Le but essentiel de la methode du premier harmonique est de determinerune estimation des parametres d’un systeme oscillant (periode et amplitude)lorsque ce dernier oscille a cause d’une retroaction du signal de sortie sur sonentree.
Ceci est represente a la figure 3.10. La boucle est fermee en forcant
u(t) = −z(t)
.
Pour qu’un cycle limite puisse se maintenir dans un tel arrangement, ilfaut que les signaux respectent les equations
y(t) = φ(u(t)) (3.23)
z(t) =
∫ t
0
y(τ)g(t− τ)dτ (3.24)
u(t) = −z(t), (3.25)

48 3 Methode du premier harmonique
u
−
y zN.L. G(s)
Fig. 3.10. La boucle de retroaction est fermee par le signal de sortie de telle sorteque u(t) = −z(t).
ou g(.) represente la reponse impulsionnelle de G(s).
Ceci correspond a determiner la nature du point fixe z(.) solution del’equation integrale non-lineaire
z(t) =
∫ T
0
φ(−z(τ))g(t− τ)dτ (3.26)
Evidemment, trouver une solution a cette equation sur toute la duree[0;T ] donne une solution exacte du probleme. Cependant, la caracteristiquepasse-bas de G(s) permet d’approximer la solution en remplacant la fonctionnon-lineaire φ par le gain equivalent N(A,ω).
Ceci est represente a la figure 3.11.
u
−
y zN(A,ω) G(s)
Fig. 3.11. Le systeme en boucle fermee est approxime par le schema ci-dessus, oula non-linearite statique φ est consideree comme un gain equivalent N(A,ω).
La non-linearite se borne a modifier le gain en fonction de l’amplitude Aet eventuellement de la pulsation ω.
Par consequent, un cycle limite existe lorsque les signaux respectent lesconditions frequentielles
Y (jω) = N(A,ω)U(jω) (3.27)
Z(jω) = G(jω)Y (jω) (3.28)
U(jω) = −Z(jω). (3.29)
Ces trois conditions conduisent a une equation unique pour Z(jω) :
Z(jω) = −G(jω)N(A,ω)Z(jω) (3.30)

3.4 Systeme en retroaction 49
Cette equation (3.30) correspond a une approximation de l’equation integrale(3.26). Le fait de considerer uniquement le premier harmonique permet defactoriser Z(jω) de telle sorte que ce facteur se simplifie dans (3.30). Unesimplification analogue est impossible dans l’equation exacte (3.26).
Ainsi, selon le critere du premier harmonique, une estimation possible del’amplitude A et de la pulsation ω du cycle limite eventuel correspond auxsolutions de l’equation
1 = −G(jω)N(A,ω). (3.31)
Il peut exister une solution, plusieurs solutions, ou aucune solution a cetteequation. Une solution est representee par un couple A, ω.
3.4.1 Representation graphique
Pour representer les solutions de l’equation (3.31), nous utilisons le dia-gramme de Nyquist. Il s’agit de representer un nombre complexe correspon-dant a une reponse harmonique (ou au gain equivalent) dans un plan ou l’axehorizontal represente la partie reelle de ce nombre et l’axe vertical, la partiecomplexe.
Re
Im
G(jω)
− 1N(A)
Fig. 3.12. Representation de la reponse harmonique et du gain equivalent dansle plan complexe (diagramme de Nyquist). Le point de croisement y est egalamentrepresente. Le cycle limite aura les parametres A et ω donne par ce point de croise-ment.
Pour obtenir une representation correspondant a la reponse harmoniqueG(jω). la pulsation ω est augmentee de maniere continue afin qu’une courbeassociee aux nombres complexes G(jω) soit representee dans ce plan. Cettecourbe est orientee dans le sens des pulsations croissantes.

50 3 Methode du premier harmonique
Nous pouvons egalement representer une courbe associee au gain equivalentN(A). Dans ce cas, l’amplitude A (et non la pulsation) est graduellementet continument augmentee de telle sorte que les points complexes −1/N(A)decrivent une courbe dans le plan. Elle est egalement orientee dans le senscroissant des amplitudes.
Un exemple de diagramme de Nyquist comprenant G(jω) et −1/N(A) estdonne a la figure 3.12.
Lorsque le gain equivalent depend a la fois de l’amplitude et de la pulsation(c.-a-d. N(A,ω)), il est necessaire de discretiser la pulsation en un ensemblefini de valeurs ω1, ω2, . . ., ωp. Ensuite, chaque gain equivalent N(A,ωi), i =1, . . . , p est considere comme un gain dependant de l’amplitude et il est traitecomme precedemment. En consequence, un ensemble de p courbes distinctesest obtenue ou chaque courbe est un lieu de points complexes −1/N(A,ωi),i = 1, . . . , p parametre par l’amplitude A.
Un cycle limite potentiel, solution de (3.31), correspond a un point d’in-tersection entre la reponse harmonique G(jω) et une des courbes representeespar −1/N(A) ou −1/N(A,ωi).
3.4.2 Double integrateur et oscillateurs lineaires
Les considerations de la section precedente prennent une caracterisationprecise lorsque le gain N est un simple nombre reel.
En partant d’un double integrateur
G(s) =1
s2,
et en effectuant une contre-reaction negative avec un gain unite
N = 1,
on se place dans une configuration particuliere du diagramme 3.11. Comme lesysteme est lineaire, la boucle fermee correspond a une fonction de transfert
G(s) = NG(s)/(1 +NG(s)),
c.-a-d.
G(s) =1
s2 + 1
et on constate que le systeme oscille car ses deux poles valent s1 = +j ets2 = −j.
Remarque 3.1. Les considerations precedentes admettent une interpretationphysique en considerant la sortie z(t) du double integrateur G(s) comme uneposition. Son entree est alors une acceleration. Le schema de la figure 3.11

3.4 Systeme en retroaction 51
signifie qu’une acceleration proportionnelle, mais de signe contraire a la posi-tion de sortie, est appliquee. Le systeme se comporte donc comme une masseunitaire soumise a une force elastique de constante egale a l’unite, et nousretrouvons l’oscillateur du chapitre precedent sous un angle nouveau. Commenous l’avons vu, l’amplitude de l’oscillation est fonction des conditions ini-tiales. C’est la une propriete universelle des oscillateurs lineaires.
L’information nouvelle est la possibilite de representer l’apparition de l’os-cillation par une particularite du diagramme de Nyquist. En reportant lacourbe G(jω) = − 1
ω2 dans ce diagramme, nous constatons que cette courbecoupe le point −1 exactement a la pulsation d’oscillation ω = 1.
En modifiant le gain N nous obtenons une autre fonction de transfertN/(s2 + N) dont les deux poles sont purement imaginaires ±j
√N . L’oscil-
lateur change de frequence. A nouveau, le diagramme de Nyquist donne uneinterpretation similaire, puisque NG(jω) coupe a nouveau le point −1 exac-tement a la pulsation ω =
√N , ou autrement dit lorsque G(jω) intersecte le
point −1/N (Figure 3.13).
Re
Im
G(jω)
ω
− 1N
−1
Fig. 3.13. Digramme de Nyquist d’un double integrateur G(s) = 1s2 . Le lieu
G(jω) = − 1ω2 intersecte tous les points sur l’axe reel negatif. Par consequent, chaque
point d’intersection − 1N
correspond a un gainN d’une contre-reaction permettant de
forcer une oscillation a la pulsation ω =√N . LorsqueN = 1, l’oscillateur correspond
au systeme masse ressort unitaire du chapitre precedent.
Ainsi, puisque tout systeme lineaire oscillant possede des pole imaginairescomplexes conjugues, ces poles annulent le denominateur de la fonction detransfert en boucle fermee, conduisant naturellement a ce que la reponse har-monique en boucle ouverte NG(jω) passe par le point −1.
Notons que dans le cas lineaire (N constant par exemple), une ca-racteristique passe-bas de la fonction de transfert n’est absolument pasnecessaire pour l’existence d’une paire de poles complexes conjugues determinantla possibilite d’avoir une oscillation a la pulsation correspondante.

52 3 Methode du premier harmonique
Neanmoins, une difficulte provient de la garantie d’existence de l’oscillationqui ne peut etre determinee qu’en considerant les poles et zeros supplementaireaux paires de poles complexes conjugues solutions de l’equation
1 +NG(jω) = 0.
3.4.3 Theoreme de Nyquist
Le diagramme de Nyquist correspond a effectuer une transformationconforme entre le plan de representation des pole et zeros du systeme en bouclefermee vers un nouveau plan ou tous les poles en questions sont envoyes aupoint unique −1.
Pour definir cette transformation conforme, on prend l’axe imaginaire ±jωen evitant soigneusement tous les poles et zeros sur cet axe en effectuant unarc de demi-cercle situe dans le demi-plan droit et de rayon infiniment faible,chaque fois qu’un pole ou zero est rencontre. On utilise alors l’application desnombres complexes a + jb → G(a + jb) (avec a, b ∈ R) qui transforme l’axeimaginaire jω du premier plan en une courbe G(jω) dans le second plan.
En rejoignant par une courbe situee dans le demi-plan droit du plan dedepart, une valeur imaginaire pure choisie arbitrairement et se trouvant sur lapartie positive de l’axe imaginaire vers celle de signe contraire situee sur l’axeimaginaire negatif, une courbe de Jordan est obtenue englobant une partiedu demi-plan droit du plan complexe initial. De plus, lorsque la courbe estparcourue dans le sens des pulsations croissantes pour le demi-axe imaginairepositif (et dans le sens des pulsations decroissantes pour le demi-axe imaginairepur negatif), la partie en question est toujours laissee a droite de la courbe. Enaugmentant d’avantage la valeur imaginaire pure choisie, tout en maintenantle module aussi grand que possible des points complexes constituants la courbequi rejoint les deux points de l’axe imaginaire choisis, une grande partie dudemi-plan droit du plan complexe est englobee. En continuant le processus, ilest possible de considererer l’ensemble de l’axe imaginaire en tant que tel etd’imaginer que l’extremite infinie positive de celui-ci est refermee a l’infini versla partie imaginaire infinie negative par une courbe de Jordan de module infini.La totalite du demi-plan droit est ainsi systematiquement laissee sur la droitede la courbe de Jordan de depart. Ce demi-plan droit est alors transforme parl’application susmentionnee a+ jb→ G(a+ jb) en la partie du plan complexelaissee a droite par la courbe G(jω) dans le plan d’arrivee.
Ces considerations sont illustrees aux figures 3.14 et 3.15, pour la fonctionen boucle ouverte G(s) = s−1
s3+2s2+3s+9 , et avec un gain unite N = 1. Lafonction de transfert en boucle fermee possede une paire de poles complexesconjugues (±2j) ainsi qu’un pole reel negatif (−2), tous trois sont envoyes aupoint −1 par la transformation a+jb→ G(a+jb). La transformation de l’axeimaginaire (en vert) est egalement illustree.

3.4 Systeme en retroaction 53
a+ jb → G(a+ jb)
−1
Fig. 3.14. La fonction de transfert en boucle fermee 1/(1+G) = (s−1)/(s3 +2s2+4s+ 8) correspond a la fonction de tranfert en boucle ouverte G(s) = (s− 1)/(s3 +2s2 + 3s + 9). A gauche, les poles et zero de la boucle fermee sont representes. Adroite, le plan de Nyquist et l’image de l’axe imaginaire du plan de gauche est trace.Les trois poles (une paire complexe conjuguee et un pole reel negatif) du plan degauche sont tous envoye au point −1 du plan de droite.
Deux courbes de Jordan delimitees par des demi-arcs de cercle ainsi queleurs images respectives sont representees a la figure 3.15.
Le demi-disque du plan droit limite par un rayon tres legerement (i.e.infinitesiment) inferieur a deux est entierement transforme dans une tresgrande region du plan droit. L’application est clairement surjective, car cer-tains points situes dans le demi-anneau de rayon 1.8 < r < 2 et ceux situesdans le demi-anneau de rayon 2 < r < 3 sont envoyes vers des points iden-tiques.
Cette surjectivite provient du fait que le degre du denominateur estsuperieur a un, de telle sorte qu’il possede plus qu’un seul pole, impliquant quele point −1 de l’image possede egalement plusieurs points sources (les polesen question). Par continuite, il existe donc des points differents de −1 duplan image auxquels correspondent plusieurs points distincts du plan source,c.-a-d. G(s1) = G(s2) 6= −1, s1 6= s2 avec s1, s2 ∈ C.
On remarque egalement que le recouvrement se produit essentiellementlorsque les poles complexes conjugues, imaginaires purs, et responsables del’oscillation, sont rencontres. De plus, il y a une extreme sensibilite entre lespoints de depart situes autour de ces poles et les points d’arrivee. (Un petitdeplacement des points dans le plan source implique un grand deplacementde leurs images.)
Une simulation du systeme precedent confirme qu’il oscille bien a la pul-sation ω = 2. Cette oscillation est stable au sens ou, bien qu’il y ait presenced’un regime transitoire conditionne par la presence du pole reel −2, il dis-paraıt rapidement pour laisser place a l’oscillation. Tout comme dans le cas

54 3 Methode du premier harmonique
-2 0 2
-2
0
2
1.8
3
-1 -0.5 0 0.5
-1
0
1
3
1.8
Fig. 3.15. Illustration des courbes de Jordan lorsque les courbes rejoignants lesdeux points de l’axe imaginaire sont des demi-cercles de rayon 1.8 et 3. Le systemeest identique a celui de la figure 3.14. Lorsque le rayon depasse la valeur 2, plus cerayon est grand, plus petite est la courbe image dans le diagramme de Nyquist.
du double integrateur en retroaction, l’amplitude de l’oscillation est fonctiondes conditions initiales.
Cependant, une difference essentielle existe entre le double integrateur etle systeme G(s) que l’on vient de presenter. Dans ce dernier cas, lorsque legain de contre-reactionN change, la reponse harmonique ne peut plus couperle point −1/N , contrairement au cas du double integrateur. Par consequent,la paire de poles complexes conjugues, imaginaires purs, disparaıt.
Nous pouvons neanmoins predire ou doivent se trouver les deux poles man-quants lorsque le gain augmente ou diminue, en utilisant a la fois la proprietede separation de l’axe imaginaire (separant le plan complexe initial en deux),et la nature de la transformation utilisee (a savoir conforme).
Sans perte de generalite, considerons une diminution du gain, disons N =0.9. Le point −1/N = −10/9 se deplace alors sur la gauche du point −1 dudiagramme de droite de la figure 3.14. Ceci signifie que, lorsqu’on se deplacesur la courbe verte solide du diagramme de droite, dans le sens croissant despulsations, nous laissons le point −10/9 sur la droite. En consequence, les polesassocies a ce point doivent se situer egalement sur la droite de la courbe vertesolide du diagramme de gauche de la figure 3.14. C’est la raison pour laquelleles poles correspondants appartiennent au demi-plan droit du diagramme degauche et possedent des parties reelles positives. Le signal de sortie est instableet l’oscillation d’amplitude constante ne se maintient pas. L’amplitude explose.A l’inverse, lorsque le gain est augmente, les poles du diagramme de gauchese deplace sur la gauche, le signal de sortie est asymptotiquement stable, (iltend vers zeros quels que soient les conditions intiales, lorsque le temps tendvers l’infini), et l’oscillation d’amplitude constante ne se maintient pas. Elles’evanouit progressivement.

3.4 Systeme en retroaction 55
Ceci est confirme en simulation en prenant N = 0.9 et N = 1.1 dont lesresultats sont donnes a la figure 3.16.
0 20 40-4
-2
0
2
4
Resultats
0 20 40-4
-2
0
2
4
Resultats
Fig. 3.16. Illustration de l’effet de la modification du gain dans le cas du systemeG(s) des figures 3.14 et 3.15. A gauche, le gain est diminue a N = 0.9, l’oscillations’amplifie. A droite, le gain est augmente a N = 1.1, et l’oscillation s’evanouit.
Par consequent, la condition de stabilite (absence de poles a partie reellepositive) est profondement liee a la maniere dont le point −1 est laisse adroite ou a gauche de l’image de l’axe imaginaire par la fonction de transfertNG(s). Pour etre plus precis, la stabilite depend de la facon dont la reponseharmonique G(jω) entoure le point −1/N .
La conclusion suit une application directe du critere de l’argument deCauchy applique a la courbe de Jordan particuliere.
Theoreme des residus et principe de l’argument de Cauchy
Le principe de l’argument de Cauchy stipule que la somme des residusassocies a des singularites de la transformation equivaut aux nombre de toursque la courbe doit parcourir autour de l’image de la singularite.
C’est un corolaire du theoreme des residus que nous donnons ci-apres.Le corolaire en question suit pour finalement presenter le resultat qui nousinteresse.
Pour commencer nous donnons la definition exacte d’un residu. Elle sefonde sur un developpement en serie de la fonction analytique f(z).
Definition 3.2. Soit f(z) une fonction complexe que nous exprimons f(z) =∑∞
−∞Ck(z− z0)k dans un voisinage de z0 en excluant z0. Le nombre C−1 est
appele le residu de f au point z0. Nous notons
Res (f ; z0) = C−1

56 3 Methode du premier harmonique
Nous donnons egalement la definition du nombre d’entourement :
Definition 3.3. Soit γ une courbe fermee et a un point qui n’appartient pasa cette courbe (a 6∈ γ). Alors
n(γ; a) =1
2πj
∫
γ
dz
z − a
est le nombre d’entourement.
Pour illustrer cette derniere definition, lorsque γ est un cercle, n(γ; z) = 1,si a est a l’interieur du cercle et lorsque a est a l’exterieur, n(γ; z) = 0.
Le theoreme des residus de Cauchy s’enonce alors
Theoreme 3.4. Supposons f analytique dans un domaine simplement connexe,si ce n’est pour un ensemble fini isoles de singularites z1, z2, . . . , zm. Soit γune courbe fermee qui ne passe par aucune des singularites. Alors
∫
γ
f = 2πj
m∑
k=1
n(γ; zk)Res (f ; zk).
X
X
XX
XX
O
O
O
P = 6
Z = 3N = -3
E(s)
ℑ ℑ
ℜ ℜ
Fig. 3.17. Illustration du theoreme des residus dans le cas particulier ou f est unefraction rationnelle E(s). A gauche, le plan s est represente avec les zeros representespar O et au nombre de Z = 3, ainsi que les poles representes par X, et au nombrede P = 6. Une courbe de Jordan quelconque dans le sens des aiguilles d’une montreest choisie. Le theoreme des residues indique que le nombre d’encerclements N del’orgine, effectue par l’image de la courbe de Jordan par l’application E(s), est egala N = Z−P = −3. La courbe encercle bien trois fois l’origine dans le sens contrairedu sens de la courbe initiale.
En somme, lorsque une courbe fermee est parcourue, seules les singularitescontribuent au nombre d’entourement de la courbe, Chaque contribution des

3.4 Systeme en retroaction 57
singularites est proportionnelle a leur residu et a leur nombre d’entourementpropre. Les singularites se somment en quelque sorte.
On comprend donc que lorsque une courbe est transformee en une autre,conservant les singularites avant et apres transformation, c.-a-d. sans modifierni le residu ni le nombre d’entourement correspondant, le nombre d’entoure-ment global doit demeurer identique.
Critere de Nyquist
En appliquant le theoreme des residus a la courbe de Jordan particulierecorrespondant a prendre l”axe imaginaire (tout en evitant les poles et zeros sesituant sur l’axe imaginaire en effectuant un ecart infinitesimal) et d’incluretout le demi plan droite du plan complexe en refermant la courbe a l’infini,on aboutit au critere de Nyquist generalise.
En effet, en prenant pour E(s) l’expression 1 + G(s)H(s) on obtient letheoreme suivant :
Theoreme 3.5. 1. On prend l’axe imaginaire du plan s, c.-a-d. jω, ω ∈[−∞;∞].
2. On prend son image par G(s)H(s)
3. N = nbr de fois que G(jω)H(jω) encercle −1 (sens trig. −).
4. P = nbr de poles de G(s)H(s) instables (≡ poles instables de 1+G(s)H(s))
Z = N + P = nbr de poles inst. de la boucle fermee (zeros inst. de1 +G(s)H(s))
Remarquons que les pole de 1 + G(s)H(s) sont egalement les poles de laboucle ouverte G(s)H(s) (la sommation de 1 ne change pas la stabilite de1 + G(s)H(s)). De plus, considerer que l’image de la courbe de Jordan par1 + G(s)H(s) encercle l’origine est identique a tester le nombre de fois quel’image de cette courbe par G(s)H(s) encercle le point −1.
Le precedent theoreme peut etre legerement modifie pour tenir compte dugain N supplementaire :
Theoreme 3.6. 1. On prend l’axe imaginaire du plan s, c.-a-d. jω, ω ∈[−∞;∞].
2. On prend son image par G(s)H(s)
3. N = nbr de fois que G(jω)H(jω) encercle −1/K (sens trig. −)
4. P = nbr de poles instables de la boucle ouverte
Z = N + P = nbr de poles instables de la boucle fermee
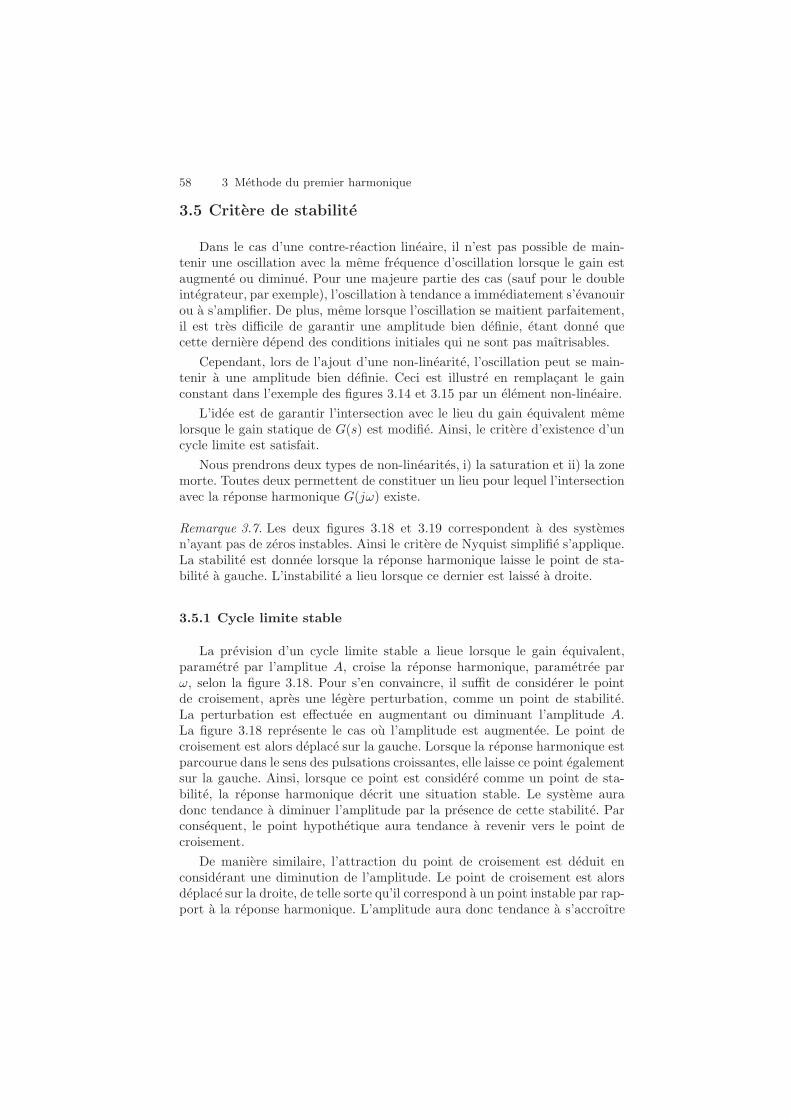
58 3 Methode du premier harmonique
3.5 Critere de stabilite
Dans le cas d’une contre-reaction lineaire, il n’est pas possible de main-tenir une oscillation avec la meme frequence d’oscillation lorsque le gain estaugmente ou diminue. Pour une majeure partie des cas (sauf pour le doubleintegrateur, par exemple), l’oscillation a tendance a immediatement s’evanouirou a s’amplifier. De plus, meme lorsque l’oscillation se maitient parfaitement,il est tres difficile de garantir une amplitude bien definie, etant donne quecette derniere depend des conditions initiales qui ne sont pas maıtrisables.
Cependant, lors de l’ajout d’une non-linearite, l’oscillation peut se main-tenir a une amplitude bien definie. Ceci est illustre en remplacant le gainconstant dans l’exemple des figures 3.14 et 3.15 par un element non-lineaire.
L’idee est de garantir l’intersection avec le lieu du gain equivalent memelorsque le gain statique de G(s) est modifie. Ainsi, le critere d’existence d’uncycle limite est satisfait.
Nous prendrons deux types de non-linearites, i) la saturation et ii) la zonemorte. Toutes deux permettent de constituer un lieu pour lequel l’intersectionavec la reponse harmonique G(jω) existe.
Remarque 3.7. Les deux figures 3.18 et 3.19 correspondent a des systemesn’ayant pas de zeros instables. Ainsi le critere de Nyquist simplifie s’applique.La stabilite est donnee lorsque la reponse harmonique laisse le point de sta-bilite a gauche. L’instabilite a lieu lorsque ce dernier est laisse a droite.
3.5.1 Cycle limite stable
La prevision d’un cycle limite stable a lieue lorsque le gain equivalent,parametre par l’amplitue A, croise la reponse harmonique, parametree parω, selon la figure 3.18. Pour s’en convaincre, il suffit de considerer le pointde croisement, apres une legere perturbation, comme un point de stabilite.La perturbation est effectuee en augmentant ou diminuant l’amplitude A.La figure 3.18 represente le cas ou l’amplitude est augmentee. Le point decroisement est alors deplace sur la gauche. Lorsque la reponse harmonique estparcourue dans le sens des pulsations croissantes, elle laisse ce point egalementsur la gauche. Ainsi, lorsque ce point est considere comme un point de sta-bilite, la reponse harmonique decrit une situation stable. Le systeme auradonc tendance a diminuer l’amplitude par la presence de cette stabilite. Parconsequent, le point hypothetique aura tendance a revenir vers le point decroisement.
De maniere similaire, l’attraction du point de croisement est deduit enconsiderant une diminution de l’amplitude. Le point de croisement est alorsdeplace sur la droite, de telle sorte qu’il correspond a un point instable par rap-port a la reponse harmonique. L’amplitude aura donc tendance a s’accroıtre

3.5 Critere de stabilite 59
lorsqu’elle est amoindrie par la perturbation. Ainsi le point hypothetique auratendance a revenir egalement au point de croisement. Le point de croisementest donc bien stable dans ce cas de figure.
ω
A
− 1K
Fig. 3.18. Illustration d’une prevision de la presence d’un cycle limite stable.
3.5.2 Cycle limite instable
La prevision d’un cycle limite instable a lieu lorsque le croisement entre legain equivalent, parametre par l’amplitude A, croise la reponse harmonique,parametree par ω, selon la figure 3.19. De maniere similaire au cas de lastabilite de la section 3.5.1, le comportement resulte de l’interpretation apresune legere perturbation. La figure represente le cas ou, apres augmentationde l’amplitude par perturbation, le point de stabilite devient instable. Cecireflete une tendance a ce que l’amplitude augmente d’avantage. Le cycle nepeut donc pas se maintenir.
Afin d’illustrer les considerations ci-dessus, nous revenons a l’exemple desfigure 3.14 et 3.15.
La fonction de transfert G(s) admet la realisation en representation d’etatsuivante
x1 = x2
x2 = x3
x3 = −2x3 − 3x2 − 9x1 + u
y = x2 − x1

60 3 Methode du premier harmonique
ω
A
− 1K
Fig. 3.19. Illustration d’une prevision de la presence d’un cycle limite instable.
Deux conditions initiales differentes, sont choisies, a savoir x10,a = x1(0) =2 et x10,b = x1(0) = 3, x2(0) = −2 et x3(0) = 0 pour les deux choix deconditions initiales.
La premiere simulation consiste a simplement boucle l’entree sur la sortieavec un gain unite, c.-a-d. u = −y. Le resultat est reporte a gauche dans lafigure 3.20. L’amplitude depend des conditions initiales.
0 10 20
-5
0
5
Resultats
0 10 20
-5
0
5
Resultats
Fig. 3.20. Illustration de l’effet des conditions initiales lorsque l’oscillateur est creeavec une retroaction lineaire (figure de gauche, gain unite) et lorsque le gain estproduit par une zone morte (figure de droite, k = 4.2 et δ = 0.9). Le systeme enboucle ouverte est le meme que celui des figure 3.14 et 3.15.
A droite de la figure est represente le resulta lorsque une zone morte rem-place le gain unite, avec k = 4.2 et δ = 0.9. On constate que l’amplitude del’oscillation ne depend pas des conditions initiales.

3.7 Oscillateur de Van der Pol revisite 61
Par consequent, lorsque la non-linearite est une zone morte, l’oscillationcorrespond a un point de stabilite. Pour le verifier, appliquons le critere de sta-bilite en utilisant la reponse harmonique G(jω) et le gain equivalent −1/N(A)de la zone morte.
G(jω) coupe l’axe reel negatif lorsque ω = 2. exactement au point −1.On calcule egalement facilement que A = 1.39 pour les parametres δ = 0.9et k = 4.2. Cette valeur d’amplitude est legerement plus grande que la valeurd’amplitude constatee, mais le resultat donne une bonne estimee etant donnela nature approximative de la methode.
3.6 Fiabilite de l’analyse par le premier harmonique
– amplitude et frequence predites ne sont pas exactes– un cycle limite prevu ne se produit pas– un cycle limite existant n’est pas predit
3.7 Oscillateur de Van der Pol revisite
Bien que sous l’hypothese passe bas de la partie lineaire, la methode dupremier harmonique s’applique a la contre-reaction par un element non-linairestatique, cette methode permet egalement de traiter d’autres types de non-linearite.
Dans cette section, nous reprenons l’oscillateur de Van der Pol et nousallons voir, dans quelle mesure, la methode de ce chapitre s’applique.
La premiere chose essentielle est de constater que l’oscillateur oscille a unefrequence fondamentale. C’est une constation, certes, triviale, mais c’est lacle de l’application correcte de la methode du premier harmonique dans cecontexte.
A partir de l’oscillation fondamentale (pulsation et amplitude), il est pos-sible d’approximer celle-ci par une onde sinusoıdale unique. En passant envariable complexe, le dephasage correspond au rapport entre partie reelle etimaginaire.
En partant de l’equation de l’oscillateur,
x+ ǫ(x2 − 1)x+ x = 0
il est possible d’isoler les termes lineaires de ceux non lineaires. C’est uneprocedure similaire a ce qui est entrepris lors de la presence d’une non-linearitestatique.
x− ǫx+ x = −ǫx2x. (3.32)

62 3 Methode du premier harmonique
Ainsi le terme non lineaire est isole au membre de droite et il constituealors le bloc non lineaire :
u(t) = −x2x.
Toutefois, ce terme ne peut pas etre transforme par un bloc a une seulesortie et une seule sortie statique. En effet, bien que statique, la presencede plusieurs entrees (x et x) pour une seule sortie (u) n’est pas exactementsimilaire a ce qui a ete vu precedemment.
Neanmoins, l’oscillation a la sortie du montage (x(t)) est assumee contenirque la fondamentale (une sinusoıde de premiere harmonique). Par consequent,les deux signaux d’entree de la non-linearite sont en fin de comptes parametrespar la phase et le rapport d’amplitude des signaux d’entree. Il est donc possiblede represente la non-linearite par son effet d’amplification et de dephasage dela sortie par rapport a l’effet combine des deux entrees. Il est alors natureld’introduire un nombre complexe constituant le gain multivariable equivalentde maniere similaire au cas mono-entree mono-sortie traite precedemment.
En utilisant la tranformee de Laplace sur la partie lineaire des equations(3.32), nous obtenons
(s2 − ǫs+ 1)X(s) = ǫU(s).
Comme seule la fondamentale est consideree
x(t) = Asin(ωt+ φ).
A cause du dephasage, nous changeons la variable temporelle pour s’endebarasser
t→ t ωt+ φ = ωt.
x(t) = A sinωt
x(t) = Aω cosωt
En examinant l’effet de la non-linearite sur le premier harmonique

3.7 Oscillateur de Van der Pol revisite 63
−xx2 = −(Aω cos(ωt))(A2 sin2 ωt)
= −A3ω cos(ωt) (1 − cos2(ωt))
= −A3ω cos(ωt)1
2(1 − cos(2 ωt))
= −A3 1
2ω(cos(ωt) − cos(ωt) cos(2ωt))
= −A3 1
2ω(cos(ωt) − 1
2(cos(ωt) + cos(3ωt)))
= −A2 1
4(Aω cos(ωt) −Aω cos(3ωt))
u ≡ A3
4ω cosωt =
A2
4
d
dt(−A sinωt)
De la precedente expression decoule le gain equivalent
N(A,ω) =A2
4jω
L’oscillateur de van der Pol peut donc etre approxime par la mise encontre-reaction negative de l’element approximant ci-dessus avec le systemelineaire
α
s2 − αs+ 1,
qui peut etre interprete comme un un filtre passe-bas. Une approximation desparametres de l’oscillation est obtenue en cherchant les solutions de
1 +G(jω)N(A,ω) = 0
On trouve aisement
A = 2
ω = 1


4
Stabilite au sens de Lyapunov
Le chapitre precedent a fait appel a la notion de la stabilite, sans pourautant en donner une definition formelle et des resultats rigoureux relatifs acette question. En effet, la stabilite de cycle limite, bien que presentee a l’aidedu concept de stabilite BIBO issue de l’interpretation frequentielle donneepar le critere de Nyquist, et etendue aux cycles limites par une methodeapproximative, demeure une notion intuitive depourvue d’une axiomatiqueprecise. La stabilite y etait consideree comme la capacite du cycle limite dese maintenir meme apres perturbation de celui-ci. Ce type de stabilite seraappele asymptotique. Le present chapitre donne les nuances entre les typesde stabilite ainsi qu’un traitement approfondi du concept, et des resultatsrelatifs. Il ne s’occupera que de l’analyse d’un point d’equilibre. Les conceptspourront alors etre etendus a la notion de cycle limite sans trop de difficulte.
4.1 Point d’equilibre
Soit donc un systeme,x = f(x)
et un point d’equilibre x
de telle sorte que,x = 0 = f(x).
4.2 Rappel de la notion de stabilite pour les systemes
lineaires
Considerons un systeme lineaire avec entree x = Ax+Bu suivi d’un bou-clage u = −Kx : de telle sorte que le systeme en boucle fermee s’ecrive

66 4 Stabilite au sens de Lyapunov
x = (A−BK)x = Ax (4.1)
Ce systeme possede un point d’equilibre unique, a condition que la matrice Ane sois pas singuliere, auquel cas l’equilibre est x = 0.
Lorsque toutes les valeurs propres de la matrice A sont a parties reellesstrictement negative (c.-a-d. Re λ(A) < 0) alors le systeme (4.1) est asymp-totiquement stable.
Remarque 4.1. La caracterisation de la stabilite par les valeurs propres, bienque tout a fait satisfaisante en lineaire, etant donne sa connexion a d’autrestypes de stabilite dans ce contexte, notamment la stabilite entree-sortie BIBO(c.-a-d. a une entree bornee, la sortie doit demeurer bornee), elle n’est pas dutout adaptee au contexte non lineaire, principalement a cause de l’impossibilitede trouver un equivalent universel du concept de valeur propre associe ausysteme dynamique x = f(x). En consequence, il faut remonter aux sourcesdu concept de stabilite afin de trouver une definition adequate.
4.3 Notion intuitive de la stabilite
Definition 4.2. Si le systeme est initialement ”legerement” perturbe de sonpoint d’equilibre le systeme reste ”proche” de ce point d’equilibre.
instablestable
Fig. 4.1. Illustration de la definition intuitive de la stabilite.
4.4 Definition mathematique precise de la stabilite
4.4.1 Notion de distance
Il faut rendre precis ”proche” et ”legerement”
Un espace vectoriel V est dit norme lorsqu’il existe une fonction x→ ‖x‖de V dans R avec les proprietes suivantes :

4.4 Definition mathematique precise de la stabilite 67
1. ‖x‖ ≥ 0, ∀x ∈ V ; et ‖x‖ = 0 seulement lorsque x = 0.
2. ‖cx‖ =| c | ‖x‖, ∀c ∈ R et ∀x ∈ V .
3. ‖x+ y‖ ≤ ‖x‖ + ‖y‖, ∀x, y ∈ V .
4.4.2 Stabilite : definition formelle
Definition 4.3. Un systeme est stable au sens de Lyapunov, si ∀R > 0, ∃r >0 tel que ‖x0‖ < r implique ‖x(t)‖ < R.
Cette definition signifie que, quelle que soit la boule d’exigence de taille R,il est toujours possible de choisir une certaine sous-boule de taille r telle que,pour toutes les conditions initiales comprises dans cette sous-boule, les tra-jectoires resultantes seront, en tout temps, comprises dans la boule d’exigencede taille R.
Lorsque le systeme est stable, il est toujours possible de trouver une tellesous-boule, meme lorsque le rayon R de la boule d’exigence est diminue demaniere a le rendre arbitrairement petit, augmentant ainsi les contraintes surles conditions initiales.
(i) (ii) (iii)
Fig. 4.2. Illustration de la definition formelle de la stabilite. (i) Pour tout choix dela boule d’exigence ‖x‖ < R, il doit etre possible de construire (ii) une sous boule deconditions initiales ‖x0‖ < r, telle que (iii) pour toute condition initiale appartenanta cette sous boule, la trajectoire resultante reste emprisonnee dans la grande boulede taille R.
Ceci corrobore la definition intuitive de la stabilite. En effet, en considerantla bille captive dans un bol, une hauteur de reference arbitraire de la bille peutetre consideree comme etant une mesure de la boule d’exigence R. Maintenant,s’il existe toujours une certaine hauteur suffisamment petite (correspondant ar), de telle sorte que, si la bille est lachee a n’importe quelle hauteur comprisedans l’interval defini par cette hauteur (associee a r), elle ne pourra jamaisdepasser la hauteur d’exigence de reference (associee a R), alors la bille serastable au sens de Lyapunov. Ceci ne signifie pas pour autant que la billerevienne asymptotiquement a son point d’equilibre.

68 4 Stabilite au sens de Lyapunov
Ainsi, la bille est stable dans le cas d’un bol concave et instable lorsque lebol est convexe.
Fig. 4.3. Lorsque le systeme est instable (a gauche), quel que soit le choix de laboule de conditions intiales de rayon r, certaines trajectoires resultantes ressortenttoujours de la boule d’exigence de rayon R. Ceci n’est pas le cas pour le systemestable (a droite).
Fig. 4.4. Lorsque l’axe du temps est utilise pour representer les solutions del’equation differentielle x = f(x), la boule d’exigence devient un cylindre. Onconstate alors clairement que lors de l’instabilite, il n’est pas possible de confi-ner toutes les trajectoires a l’interieur du cylindre pour toute boule de conditionsinitiales a l’interieur de celui-ci.
Les figures 4.3 et 4.4 representent les trajectoires du systeme
x1 = 4x2 + 0.2x1
x2 = −6 sin(x1) + b(0.9 − cos(6t))
Lorsque b = −0.4, le systeme est stable. La condition initiale est choisie enx1(0) = x2(0) = 0.5 et le temps d’arret de la simulation est fixe a T = 10 (adroite dans les figures 4.3 et 4.4). Lorsque b = 0.1, le systeme est instable. Lesconditions initiales sont choisies arbitrairement, par exemple x1(0) = x2(0) =0.2, et le temps d’arret de la simulation est fixe T = 9 (a gauche dans lesfigures 4.3 et 4.4).

4.4 Definition mathematique precise de la stabilite 69
L’instabilite est definie des lors que la stabilite n’a pas lieu.
Definition 4.4. Un systeme est instable au sens de Lyapunov lorsque il n’estpas stable au sens de la definition 4.3.
Ceci semble etre une tautologie. Cependant l’importance de cette definitionprovient du fait que l’instabilite ne signifie pas necessairement une formed’explosion ou de divergence a l’infini. En effet, il existe des systemes quiconvergent asymptotiquement vers un point d’equilibre quelles que soient lesconditions initiales, sans pour autant que ces systemes puissent etre considerescomme stables. Ceci provient du fait qu’il est impossible de dominer le com-portement transitoire des trajectoires resultantes, meme en rapprochant lesconditions initiales de l’origine. Les excursions des trajectoires sont toujoursbornees inferieurement par une boule de taille fixe, temoignant ainsi de l’in-stabilite au sens du non respect de la definition 4.3.
L’exemple suivant illustre le phenomene.
0.1 0.2 0.3 0.4 0.5 0.6 0.7
0.2
0.4
0.6
0.8
Fig. 4.5. Exemple d’un systeme convergent mais instable.
Exemple 4.5. Soit le systeme planaire,
x1 =x2
1(x2 − x1) + x52
(x21 + x2
2)[1 + (x21 + x2
2)2]
x2 =x2
2(x2 − 2x1)
(x21 + x2
2)[1 + (x21 + x2
2)2].
Plusieurs solutions pour differentes conditions initiales sont representeesa la figure 4.5. Les trajectoires, bien que commencant pres de l’origine, s’enecartent pour finir par y revenir le long de l’axe horizontal. Il s’agit donc biend’une convergence asymptotique. Cependant, le systeme est instable etant

70 4 Stabilite au sens de Lyapunov
donne que les trajectoires ne peuvent pas etre contraintes a demeurer dans uneboule de taille suffisamment petite, quel que soit la proximite des conditionsinitiales de l’origine.
4.4.3 Illustration
sans frottement avec frottement
Fig. 4.6. Deux cas pour lesquels la bille est stable.
4.4.4 Stabilite asymptotique
La stabilite asymptotique exige l’existence d’une voisinage de l’equilibretel que toute trajectoire ayant pour condition initiale un point de ce voisinageconverge vers le point d’equilibre. En somme, on aimerait que le systemerevienne et s’arrete au point d’equilibre lorsqu’il en est legerement perturbe.
Definition 4.6. Le point d’equilibre x = 0 de x = f(x) est asymptotiquementstable a condition
1. qu’il soit stable au sens de Lyapunov
2. qu’il existe une boule de de condition initiales ‖x0‖ < r0 telles que lessolutions resultantes soient telles que x(t) → 0 lorsque t→ ∞.
4.4.5 Desavantages de la definition
La definition de stabilite presente certains desavantages importants :
– Il est necessaire de pouvoir calculer de maniere explicite chaque solutioncorrespondant a chacune des conditions initiales.
– Le maniement de la definition est fastidieux.
Par consequent, des resultats permettant de determiner la stabilite sansdevoir integrer les equations dynamiques seraient les bienvenus.

4.5 Methode directe de Lyapunov 71
∃r0
Fig. 4.7. Condition pour la stabilite asymptotique.
4.5 Methode directe de Lyapunov
Lorsque la bille est examinee selon un point de vue different, on constateque le comportement stable ou instable de celle-ci est relie a la fois a la ca-racteristique et a l’evolution de sa fonction d’energie. La presence d’un maxi-mum ou minimum d’energie potentielle possede une influence critique. Deplus, la presence de frottement est responsable de la decroissance de l’energiecomplete (cinetique et potentielle) et influence donc la stabilite.
La bille possede donc une fonction d’energie E qui comporte une partd’energie potentielle Ep et une part d’energie cinetique Ec. On a E = Ec+Ep.
– Le comportement est stable lorsque :– L’energie E diminue et est minimum au point d’equilibre.– L’energie E est conservee et E est minimum a l’equilibre
– Par contre, le comportement est instable lorsque :– L’energie E augmente.– L’energie E est conservee mais elle ne correspond pas a un minimum
a l’equilibre.
La theorie de Lyapunov et en particulier la deuxieme methode de Lya-punov (dite aussi methode directe) generalise cette constatation a une classeplus large de fonctions. Ces fonctions sont notees V .
4.5.1 Candidat de Lyapunov
La fonction d’energie possede deux proprietes essentielles. La premiereest la qualite d’extremum au point d’equilibre, a savoir s’il s’agit d’un maxi-mum ou d’un minimum. Le point d’equilibre a tendance a etre stable lorsquecet extremum est un minimum. Le candidat Lyapunov est une fonction quipresente ce type de particularite. Afin de forcer la presence d’un minimum aupoint d’equilibre, la fonction sera contrainte a etre positive pour toute valeurdifferente de l’origine. Elle ne pourra s’annuler qu’a l’origine.

72 4 Stabilite au sens de Lyapunov
Definition 4.7. (Fonction definie positive) Une fonction definie positive estune fonction f(x) : RN → R telle que f(x) > 0, ∀x 6= 0 et f(x) = 0 lorsquex = 0.
De plus, cette fonction sera continue. On aboutit donc a la definition ducandidat de Lyapunov.
Definition 4.8. (Candidat de Lyapunov) Une fonction definie positive conti-nue, notee V (x), est un candidat de Lyapunov.
4.5.2 Fonction de Lyapunov
La deuxieme particularite de la fonction d’energie lors de la presence d’unsysteme stable, est d’avoir tendance a diminuer ou d’etre conserve lors del’evolution du systeme. En consequence, on exigera en plus du candidat deLyapunov que la derivee de celui-ci soit negative.
La derivee s’ecrit,
V (x) =
(
∂V
∂x
)T
f(x)
Remarque 4.9. La notation V (x) est utilisee. Toutefois, ceci n’est pas tresrigoureux. Nous verrons dans le chapitre 7, qu’il est possible de definir leconcept de derivee temporelle projetee le long du systeme qui sera appeleederivee de Lie et notee LfV (x). Par consequent, la notation LfV (x) est plus
precise que V (x). Lorsque ceci ne prete pas a confusion, la notation V (x) serapreferee dans ce chapitre, de part le caractere simple et suggestif de cettenotation.
Definition 4.10. (Fonction de Lyapunov) Une fonction de Lyapunov est uncandidat de Lyapunov, a savoir une fonction continue V (x) telle que
V (x) > 0 ∀x 6= 0, V (x) = 0 x = 0,
ayant en plus la propriete
V (x) ≤ 0 ∀x 6= 0, V (x) = 0 x = 0.
Le theoreme de stabilite fondamental de la theorie de Lyapunov peut main-tenant etre enonce.
Theoreme 4.11. (Seconde methode de Lyapunov, dite aussi methode directe)
Si une fonction de Lyapunov existe pour un systeme donne alors ce systemeest stable.
Si la fonction de Lyapunov est strictement decroissante, c’est-a-dire queV (x) < 0, ∀x 6= 0, alors la stabilite est en plus asymptotique.

4.6 Exemple : robot 73
4.6 Exemple : robot
Un exemple simple illustrera l’avantage de la fonction de Lyapunov sur lesimple concept d’energie. Il s’agit d’un robot ayant un nombre arbitraire nmais fini de degres de liberte. Chacun des degres de liberte est associe un ac-tuateur responsable d’un mouvement le long de la coordonnee correspondante.Une representation possible est donnee a la figure 4.8.
τ2q2
q1τ1
Fig. 4.8. Robot planaire comportant un actuateur independant pour chacune descoordonnees.
4.6.1 Loi de commande
Pour beaucoup de systemes de la theorie de la commande lineaire, les loisde type proportionelle (P), proportionelle et derivee (PD), et prportionnelleet derivee avec terme integral (PID) suffissent pour un tres grand nombred’application. C’est pourquoi nous prendrons, comme choix initial de loi decommande, une loi de type proportionnelle-derivee (PD) de la forme :
τ = −Kdq −Kp(q − q). (4.2)
Il s’agit maintenant de justifier ce choix a l’aide des techniques de Lyapunov.
4.6.2 Lois de la mecanique
Afin d’obtenir un modele suffisant pour etablir la preuve de stabilite de laloi de commande envisagee, nous appliquerons le simple bilan des puissances.
L’ energie cinetique peut s’exprimer comme

74 4 Stabilite au sens de Lyapunov
Ec =1
2qTM(q)q.
Le bilan de puissance s’ecrit
d
dtEc = P
d
dt1/2
(
qTM(q)q)
= qT τ.
4.6.3 Candidat Lyapunov
La souplesse du candidat de Lyapunov permet d’envisager des expressionsqui a priori n’ont pas une expression physique speciale. Par exemple, nousenvisagerons une modification de la fonction d’energie cinetique faisant in-tervenir un terme aditionel qui n’a pas d’interpretation physique immediate,puisqu’il ne correspond pas au robot en tant que tel :
V =1
2(q − q)TKp(q − q) +
1
2qTM(q)q. (4.3)
On constate bien que cette fonction est definie positive au sens ou V (q) > 0,∀q 6= q et V (q) = 0.
4.6.4 Fonction de Lyapunov
Afin de verifier que le candidat de Lyapunov est bien une fonction deLyapunov, il est necessaire de tester la decroissance de cette fonction.
V = qTKp(q − q) + qT τ
En introduisant la loi de commande (4.2),
V = qTKp(q − q) + qT (−Kdq −Kp(q − q)) = −qTKpq ≤ 0,
et le robot est donc bien rendu stable par l’adjonction de la loi de commandede type PD. En effet les deux conditions sur la fonction de Lyapunov sontsatisfaitent. V > 0 ∀x 6= 0 provient de la structure de la fonction de Lyapunov(4.3)
Remarque 4.12. L’aspect abstrait de la fonction de Lyapunov (abstrait au sensque cette fonction est une notion purement mathematique et non physique),peut maintenant etre exploitee en revenant en arriere dans l’interpretation decette fonction. En examinant la structure de l’equation (4.3), on constate quele terme que l’on a ajoute possede la structure d’energie potentielle elastique,bien qu’il n’y a pas de presence de ressort physiquement dans le systeme.C’est la loi de retroaction qui agit comme si, au lieu d’appliquer une loi decommande, le systeme etait muni de ressorts responsables de la generationd’une force proportionnelle lorsque le robot quitte son point d’equilibre.

4.7 Theoreme de stabilite locale 75
4.7 Theoreme de stabilite locale
Le premier resultat en relation avec la fonction de Lyapunov est le resultatde stabilite locale autour du point d’equilibre. Nous enoncons le theoreme avecprecision :
Theoreme 4.13. ∃ BR0telle que
– V (x) > 0 (∀x 6= 0 dans BR0) et V (0) = 0
– ddtV (x) ≤ 0 (dans BR0
)
alors le point d’equilibre x = 0 est stable. Si en plus, ddtV (x) < 0 ∀x 6= 0,
alors il y presence d’une stabilite asymptotique
Nous allons egalement proceder a sa demonstration. L’objectif est deconnecter les concepts contenus dans ce theoreme avec la defintion relati-vement difficile a manier examinee au debut de ce chapitre (definition 4.3).
4.7.1 Preuve (stabilite locale)
Tout au long de la demonstration, la distinction entre sphere et boule seraeffectuee. Une sphere est la partie la plus a l’exterieur d’une boule pleine(en quelque sorte ceci correspond a l’ecorce d’epaisseur infinitesimale d’uneorange) et la boule est la boule pleine prise dans son ensemble (l’orangeentiere). La definition suivante precise ces deux notions au niveau mathematique :
Definition 4.14. Une sphere de rayon r est notee Sr et une boule de memerayon est notee Br, et sont definies par
Sr = x | ‖x‖ = rBr = x | ‖x‖ ≤ r.
S B
Fig. 4.9. Difference entre sphere S et boule B
La proposition a demontrer consiste a verifier que quel que soit la grandeboule d’exigence ∀BR, il est toujours possible de trouver une sous-boule deconditions initales ∃Br tel que si le systeme commence a l’interieur de cette

76 4 Stabilite au sens de Lyapunov
BR
Br
x(t)
Fig. 4.10. Trajectoire dans le cas d’un systeme stable.
sous-boule, x0 ∈ Br, alors x(t) ∈ BR. La trajectoire doit rester comprise dansla boule de grand rayon comme l’illustre la figure 4.10
Pour debuter la demonstration, un rayon R est choisi de maniere quel-conque. On examine alors la fonction de Lyapunov V (x) sur la sphere derayon R et on definit son minimum m sur cette sphere SR.
m = minx∈SR
V (x).
Br
SR
V = m
Fig. 4.11. m represente le minimum de V (x) lorsque x parcourt la sphere SR.
Etant donne que V (x) est une fonction de Lyapunov, elle possede la pro-priete d’etre continue et de s’annuler a l’origine. Par consequent, il existeun rayon r, suffisamment petit, pour lequel, quel que soit x compris dans laboule Br, la fonction de Lyapunov V (x) (vue comme simple fonction du pointx considere) demeure inferieure a m. En d’autres termes, en se rapprochantde l’origine, il est toujours possible de trouver une petite region telle que, lavaleur de la fonction soit tres petite, et donc plus petite que la valeur m. Eneffet, la fonction de Lyapunov ne peut pas changer de maniere brutale, ense deplacant de la sorte, parce que la fonction de Lyapunov est continue. Lapetitesse de V provient alors de son annulation a l’equilibre. Afin de satisfaireces deux contraintes, la valeur maximum de V , dans une region donnee com-prenant le point d’equilibre, decroit necessairement de plus en plus, au fur et a

4.7 Theoreme de stabilite locale 77
mesure que cette region se retrecit. Une coupe verticale illustre le phenomenea la figure 4.12.
0
Br
SR
m
V (x)
Fig. 4.12. Coupe verticale de la consequence de la continuite de la fonction deLyapunov et de son annulation au point d’equilibre.
La stabilite decoule alors de maniere tres naturelle, etant donne que lacondition de decroissance de la fonction de Lyapunov, d
dtV (x) ≤ 0, impliqueque V (x(t)) < m, puisque son maximum dans la boule BR est celui sur lasphere SR et donc correspond a m. La trajectoire ne peut donc pas traverserSR. Elle demeure dans la boule BR, pour les conditions initiales ∀x0 ∈ Br. Lastabilite est donc bien demontree.
4.7.2 Preuve de stabilite locale asymptotique
La stabilite asymptotique est plus difficile a etablir. La fonction de Lyapu-nov est supposee strictement decroissante, c’est-a-dire que V (x) < 0, ∀x 6= 0et V (0) = 0.
Comme V ≥ 0 et V decroit, la fonction de Lyapunov tend vers une limite Lqui est superieure ou egale a zero (V → L, L ≥ 0). Deux cas seront envisages,(a) L = 0 et (b) L > 0.
(a) Si L = 0 alors x(t) doit necessairement converger vers zero. Ceci pro-vient du fait que la fonction de Lyapunov s’annule seulement a l’origine. Lastabilite asymptotique est dans ce cas demontree.
(b) L > 0
Comme V (0) = 0 et V est continue, il est possible de trouver une petiteboule Br0 telle que, pour tout point compris a l’interieure de celle-ci, V estinferieur a L (se referer a l’explication donnee dans le cas de la stabilite, avecm au lieu de L). Ceci est represente a la figure 4.13.
Considerons W = BR \ Br0 . Ceci revient a enlever un noyau de taille r0de la boule de taille R. Cette region est representee en vert a la figure 4.14.L’hypothese que V → L implique que la trajectoire reste a l’interieur de cetteregion.

78 4 Stabilite au sens de Lyapunov
L
V
x
Br0
Fig. 4.13. Pour tout point dans Br0, V est garantit inferieur a L.
W V = L
ddtV = −L1
Fig. 4.14. Une boule de taille r0 est extraite de la boule de taille R. On y defninitle minimum de V = L et la decroissance la plus lente de V .
En se restreignant a la fermuture W , il est evident que 0 6∈ W et que W estun compact (ensemble ferme et borne). De part la compacite, il doit existerun minimum de V note L,
L = minx∈W
V (x), (0 < L < L),
atteind en un point de W . De plus, V < 0 pour tout point de W et deW . Par consequent une decroissance minimum de V est atteinte en un pointparticulier de W , i.e.
L1 = minx∈W
(
− d
dtV (x)
)
.
En procedant a quelques calculs, on obtient
∫ t
0
V (x(t))dt = V (x(t)) − V (x(0))
V (x(t)) =
∫ t
0
V (x(t))dt + V (x(0))
Il est maintenant possible de borner l’evolution de V en se placant dans lescenario le plus defavorable, c’est-a-dire en supposant qu’en chaque instant ladecroissance soit minimum : − d
dtV > L1. Par ,∫ t
0 V (x(t))dt < −L1t et

4.9 Stabilite globale 79
V (x(t)) < V (x(0)) − L1t.
Il existe donc un instant fini t1 tel que V (x(t1)) < L. Mais ceci contredit le faitque la trajectoire reste dans W par hypothese, impliquant ainsi necessairementque L = 0. La stabilite asymptotique decoule des lors du cas (a).
4.8 Stabilite exponentielle
Nous connaissons la stabilite asymptotique : x(t) → 0 lorsque t→ ∞Cependant on veut garantir plus :
Definition 4.15. x = 0 est un point d’equilibre localement exponentiellementstable si ∃α > 0 et ∃λ > 0, ∃r > 0 tel que,
∀t > 0, ‖x(t)‖ ≤ α‖x(0)‖e−λt, ∀x ∈ Br.
4.8.1 Exemple : Dynamique des populations
4.9 Stabilite globale
Pour l’instant, nous avons exclusivement traite de proprietes locales, dansle sens que la conclusion du theoreme de Lyapunov ne conclut que la stabiliteen relation avec des conditions initiales comprises dans un voisinage du point.Par consequent, le simple fait que V soit defini positif et que V soit negatifdans tout l’ensemble d’etat, ne garantit pas necessairement que le systeme soitglobalement stable. En d’autres termes, la stabilite locale signifie la stabilitepour ∀x0 ∈ BR0
et la stabilite globale celle pour ∀x0 ∈ Rn. La question estde savoir s’il suffit de remplacer BR0
par Rn et de verifier les hypotheses dutheoreme de Lyapunov afin de conclure sur la stabilite globale du systeme. Lareponse est non comme va l’illustrer l’exemple suivant :
x1 = 2x1
x2 = −x2
dont un candidat de Lyapunov est,
V =x2
1
1 + x21
+ x22.
Les courbes de niveau de cette fonction de Lyapunov sont representees ala figure 4.15. Pour autant que V est inferieure a l’unite les courbe de niveausont fermees et encerclent une region compacte. Des que la valeur depasse 1,

80 4 Stabilite au sens de Lyapunov
-10 -5 5 10
-1.5
-1
-0.5
0.5
1
1.5
V = 1.4
V = 1.1V = 0.9
Fig. 4.15. Courbe de niveau de la fonction de Lyapunov V =x2
1
1+x21
+ x22
.
les courbes de niveau ne croisent plus l’axe horizontal et ne sont donc plusfermees.
Les solutions explicites du systeme sont,
x1(t) = x10e2t
x2(t) = x20e−t.
Apres elimination du temps,
x2 = x20√x10x
− 1
2
1 .
En prenant une condition intiale particuliere,
x2 = x20√x10x
− 1
2
1
x10 = 1.5
x20 = 2/√
1.5 ≈ 1.633,
on obtient une trajectoire rouge qui est representee en surimpression sur lescourbes de niveau precedemment obtenues (figure 4.16).
En outre, la courbe representee continue indefiniment sur la droite sansjamais sortir du premier quadrant ! Le systeme glisse donc vers l’infini bien quela valeur de la fonction de Lyapunov diminue a chaque instant. Elle diminueet tend asymptotiquemen vers un, mais sans jamais y parvenir.
Le probleme provient du fait que V = cte n’est pas une courbe fermee,c’est-a-dire que la fonction V n’est pas radialement non bornee.
Par consequent il faut une condition supplementaire,
Theoreme 4.16. Pour que l’on puisse garantir que le theoreme de Lyapunovconcluse sur la stabilite globale d’un systeme, il faut d’une part que toutes

4.10 Fonction de Lyapunov pour les systemes lineaires 81
-10 -5 5 10
-1.5
-1
-0.5
0.5
1
1.5
Fig. 4.16. Une solution particuliere montre que V decroit a chaque instant le longde cette solution.
les hypotheses de ce theoreme soient satisfaites, mais il faut egalement que lacondition de bornitude radiale existe, c’est-a-dire que
V (x) → ∞ lorsque ‖x‖ → ∞.
Le theoreme suivant recapitule les conditions :
Theoreme 4.17. S’il existe une fonction V telle que– V (x) > 0, ∀x 6= 0 et V (0) = 0– ‖x‖ → ∞ ⇒ V (x) → ∞– ddtV (x) < 0, ∀x 6= 0
alors x = 0 est globalement asymptototiquement stable.
4.10 Fonction de Lyapunov pour les systemes lineaires
La theorie de Lyapunov est une theorie tres generale s’appliquant aussibien aux systemes non lineaires que lineaires. Il est interessant d’interpretersa signification en termes de representation d’etat des systemes lineaires.
Theoreme 4.18. Soit x = Ax tel que ∀λ, ℜe(λ) < 0 (systeme stable au sensstrict) alors ∀Q > 0, ∃P > 0 tel que
ATP + PA = −Q (4.4)
Preuve. Comme toutes les valeurs propres de la matrice A sont stables, eAt estune fonction decroissante telle que ‖eAt‖ → 0, lorsque t→ ∞. En choisissantQ > 0 (une matrice definie positive) nous allons construire une matrice Psatisfaisant l’equation (4.4). Comme A et AT ont toutes les deux des valeurspropres a partie reelle strictement negative (matrices de Hurwitz),

82 4 Stabilite au sens de Lyapunov
‖etAT
QetA‖ ≤ c‖Q‖e2λt,
pour tout t ≥ 0, ou λ ≤ 0 est n’importe quel nombre reel tel que les valeurspropres de AT et A ont une partie reelle plus petite que λ. Ainsi,
P = −∫ ∞
0
etAT
QetAdt (4.5)
est bien definie. De plus,
ATP + PA = −∫ ∞
0
(
AT etAT
QetA + etAT
QetAA)
dt
= −∫ ∞
0
d(etAT
QetA)
dtdt
= Q− limt→∞
etAT
QetA
= Q
Remarque 4.19. Le theoreme precedant permet de tester si une matrice estHurwitz sans devoir calculer ses valeurs propres. Soit une matrice A reelledonnee. Fabriquons l’equation
ATX +XA = −I,
et resolvons la pour une matrice symetriqueX . Ceci est une equations lineaireet donc l’elimination de Gauss doit aboutir a un resultat. En testant alors lesmineurs principaux de X on peut conclure sur la stabilite de A. Ils doiventtous etre strictement positif pour que la matrice A soit Hurwitz.
4.11 Stabilite locale et linearisation
Une approximation locale de la dynamique du systeme autour du pointd’equilibre permet, dans certains cas, de deduire la stabilite locale du systemecomplet. Il s’agit de la methode indirecte de Lyapunov. L’approximation aupremier ordre du developpement en serie de Taylor de la dynamique est cal-cule, et seul le premier ordre du developpement est retenu. Lorsque la dyna-mique est donnee par un champ de vecteurs (cf. chapitre 7) f(x), une matriceest obtenue pour caracteriser le premier ordre. Son expression est donnee par,
A =∂f
∂x
∣
∣
∣
∣
x=0
.
Cette matrice possede des valeurs propres qui permettent de deduire la sta-bilite du systeme x = Ax. La question est de savoir si elles peuvent egalementinduire une conclusion sur la stabilite du systeme non lineaire x = f(x).

4.11 Stabilite locale et linearisation 83
Le theoreme suivant donne les resultats que l’on peut garantir. Seul lecas ou toutes les valeurs propres ont une partie reelle negative ou nulle aveccertaines d’entre elles ayant une partie strictement nulle, n’est pas conclusif.Seul les termes d’ordre superieur peuvent nous renseigner sur la stabilite dusysteme non lineaire. Par contre, pour tous les autres cas, le premier ordre estsuffisant.
Theoreme 4.20. Soit x = f(x), et on pose A = ∂f∂x
∣
∣
∣
0avec
Λ = λ(A)
– ∀λ ∈ Λ, Re(λ) < 0 ⇒ x = 0 est asymptotiquement stable.– ∃λ ∈ Λ, Re(λ) > 0 ⇒ x = 0 est instable.– ∀λ ∈ Λ, Re(λ) ≤ 0 et ∃λ1 Re(λ1) = 0 on ne peut pas conclure.
Montrons ∀λ ∈ Λ, Re(λ) < 0 ⇒ x = 0 est localement asymptotiquementstable.
Preuve.
x = f(x) =∂f
∂x
∣
∣
∣
∣
x=0
x+ g(x) = Ax+ g(x)
Ceci n’est qu’une reecriture de x = f(x) en isolant le terme de dependancelineaire dans Ax et les termes d’ordre superieur dans g(x). Comme les termesqui dependent de maniere lineaire de x sont isoles dans Ax, ‖g(x)‖ decroit
plus vite que ‖x‖ : limx→0‖g(x)‖‖x‖ = 0.
r1 r2 r3
γ1‖x‖
γ2‖x‖
γ3‖x‖‖ g(x)‖
Fig. 4.17. Illustration de la dominance du terme lineaire Ax sur le terme nonlineaire g(x).
Ceci signifie que pour tout γi > 0, il existe ri tel que pour tout x tel que‖x‖ < ri ⇒ ‖g(x)‖ < γi‖x‖. Comme A est stable ∀Q > 0, ∃P > 0
ATP + PA = −Q

84 4 Stabilite au sens de Lyapunov
et donc en posant V = xTPx, avec x = f(x) = Ax+ g(x)
V = xTPx+ xTP x = (Ax+ g(x))TPx+ xTP (Ax+ g(x))
= xT (ATP + PA)x+ g(x)TPx+ xTPg(x)
= −xTQx+ 2xTPg(x)
De l’inegalite du produit scalaire : ‖aT b‖ ≤ ‖a‖‖b‖ on deduit
V ≤ −xTQx+ ‖x‖‖P‖‖g(x)‖
Comme limx→0 ‖g(x)‖/‖x‖ = 0, ∀γ > 0, ∃r, ∀x ≤ r ⇒ ‖g(x)‖ < γ‖x‖.
V < −xTQx+ γ‖P‖‖x‖2
Sachant que −xTQx ≤ −λmin‖x‖2 on a donc
V < −(λmin − γ‖P‖)‖x‖2
Il suffit de choisir γ suffisamment petit afin que (λmin − γ‖P‖) > 0. Ainsipour le r associe au γ choisi, V < 0, ∀x, ‖x‖ < r.
Par consequent, le systeme x = f(x) est localement asymptotiquementstable.
Les autres cas peuvent etre egalement demontres. Nous renvoyons le lecteuraux references [Vid93], [Kha02] et les references s’y trouvant.
4.11.1 Inconvenients de la methode indirecte
La methode indirecte de Lyapunov possede deux inconvenients principaux.Le premier est le caractere local du resultat. La stabilite que l’on peut concluren’est valable que dans un voisinage du point d’equilibre. On ne peut pasgarantir r tres grand. Le second inconvenient est que la methode est nonconclusive lors de la presence de valeur(s) propre(s) a partie reelle nulle. Cesinconvenient n’apparaissent pas dans la methode directe de Lyapunov. Le prixa payer est ka determination de la fonction complementaire V (x) possedantles bonnes proprietes.
4.12 Stabilite exponentielle
La stabilite asymptotique garantit que le systeme converge vers le pointd’equilibre, lorsque le temps tend vers l’infini. Pourtant, nous avons aucun

4.13 Theoreme d’invariance de LaSalle 85
moyen de quantifier la qualite de cette convergence, en particulier sa vitessede convergence.
Afin d’obtenir plus que la simple convergence asymptotique, il est possibled’introduire un concept plus exigeant que la simple stabilite asymptotique. Sil’etat du systeme, lors de sa convergence, est compris dans une enveloppe quidecrois de maniere exponentielle, la stabilite est qualifiee d’exponentielle.
Definition 4.21. x = 0 est un point d’equilibre localement exponentiellementstable si ∃α > 0 ∃λ > 0, ∃r > 0, α, λ, r ∈ R tels que,
∀t > 0, ‖x(t)‖ ≤ α‖x(0)‖e−λt, ∀x ∈ Br.
4.13 Theoreme d’invariance de LaSalle
Bien que certains systemes ont la caracteristique d’avoir une fonction deLyapunov decroissante, mais pas pour autant strictement decroissante, (c’est-a-dire V ≤ 0 au lieu de V < 0, x 6= 0), ils sont neanmoins asymptotiquementstable. L’objet de cette section est de presenter les conditions supplementairessur la fonction V et sa derivee dans le temps pour garantir la stabilite asymp-totique.
De plus, l’outil qui sera presente permet de traiter egalement la conver-gence vers un cycle limite. Nous verrons egalement que le caractere positifdefini de V peut tres bien etre relaxe. Le theoreme ne donnera pas une preuvede stabilite au sens de Lyapunov, mais un critere de convergence asympto-tique ; ceci valant autant pour les points d’equilibre que pour les cycles limites.
4.13.1 Ensemble invariant M
Avant de presenter le resultat a proprement parler, le concept d’ensembleinvariant est expose. Comme son nom l’indique, il s’agit avant tout d’un en-semble donne par la reunion de points de l’espace d’etat.
Le deuxieme element est le terme ”invariant”, et ici l’equation x = f(x)prend toute son importance.
Un ensemble invariant est un ensemble de points de l’espace d’etat tel quetoute trajectoire du systeme x = f(x), ayant pour condition initiale un pointde cet ensemble, reste indefiniement a l’interieur de cet ensemble.
Ainsi, l’ensemble est constitue par un sous ensemble de conditions initialestelles que toutes les trajectoires issues de ces conditions intiales restent dansl’ensemble en question.
Definition 4.22. (flot) La solution du systeme x = f(x) ayant comme condi-tion initiale x(0) = x0 sera notee Φ(x0, t) :

86 4 Stabilite au sens de Lyapunov
d
dtΦ(x0, t) = f(Φ(x0, t)).
Φ(x0, t) signifie, qu’une fois la condition initiale x0 donnee, l’etat x devientune fonction uniquement du temps Φ(x0, t). On peut donc deriver cette fonc-tion par rapport au temps, et cette derivee doit correspondre a la dynamiquea ce point f(Φ(x0, t)).
Definition 4.23. (ensemble invariant) Un ensemble invariant M, pour unsysteme dynamique x = f(x), est defini comme un ensemble de conditionsinitiales, tels que la solution Φ(x0, t) reste dans l’ensemble M ∀t, c.-a-d.
M = x | x0 ∈ M ⇒ Φ(x, t) ∈ M ∀t ≥ 0
M
x0
Φ(x0, t)
Fig. 4.18. Ensemble invariant M
4.13.2 Ensemble d’annulation de la derivee de la fonction deLyapunov
Parallelement a la notion d’ensemble invariant, celui des points pour les-quels V s’annule est de premiere importance. Ceci n’a rien de surprenant,car un des objets de cette analyse est d’etendre la conclusion de la stabiliteasymptotique au cas ou V ≤ 0 au lie de V < 0 ; la difference entre les deuxcas se situent dans la possibilite que V = 0.
L’ensemble en question est note R et correspond mathematiquement a
R = x | V (x) = 0
et il est represente a la figure 4.19.
Le theoreme de Lasalle peut maintenant etre enonce. C’est un resultat denature locale au sens ou il necessite la connaissance d’un ensemble compactpour toutes les conditions initiales.
Theoreme 4.24. (Theoreme d’invariance de LaSalle) Soit l > 0, et Ωl =x | V (x) ≤ l :

4.13 Theoreme d’invariance de LaSalle 87
R = x | V (x) = 0Fig. 4.19. Ensemble R. C’est l’ensemble de points pour lesquels V = 0.
– Ωl ferme et borne– ∀x ∈ Ωl on a V ≤ 0– R ⊂ Ωl et R = x | V (x) = 0– M le plus grand ensemble invariant, M ⊂ R
⇒∀x0 ∈ Ωl, X (x0, t) → M lorsque t → ∞.
Remarque 4.25. Il est important de mentionner deux aspects important :
1. Il n’y est pas question de stabilite, mais uniquement de convergence.
2. La fonction V (x) n’est pas necessairement definie positive.
Le theoreme de LaSalle donne la stabilite asymptotique d’un point d’equilibrelorsque la condtion V > 0, x 6= 0 et V (0) = 0 est explicitement ajoutee.Ce theoreme possede l’avantage de s’appliquer a l’analyse de la convergenceasymptotique vers un cycle comme l’illustre la figure 4.20
M
Ωl
R
cycle limiteM
Ωl
R
point d’equilibre
Fig. 4.20. Le theoreme d’invariance s’applique aussi bien aux points d’equilibrequ’aux cycles limites.
4.13.3 Exemple : le pendule simple
On considere un simple pendule qui consiste en une masse m reliee par unetige de longueur unitaire a son axe de rotation. Il est soumis a un frottementvisqueux proportionnel a la vitesse du pendule autour de son axe.

88 4 Stabilite au sens de Lyapunov
La position du centre de masse est donnee par x = sin θ et y = cos θ detelle sorte que son energie cinetique s’ecrit
Ecin = 1/2m(x2 + y2) = 1/2mθ2.
On suppose egalement que la gravite agit dans le sens perpendiculaire al’axe de rotation. Par consequent, l’energie potentielle s’exprime
Epot = mg(1 − cos θ).
A l’aide de ces deux quantites, nous pouvons etablir la representationd’etat du modele dynamique en appliquant le formalisme de Lagrange. Uneseule coordonnee generalisee est dans ce cas necessaire (a savoir θ). Le lagran-gien est donne par L = Ecin − Epot. De plus, une force generalisee Fθ = −bθs’applique egalement, ou b ∈ R est un parametre positif (b > 0) correspondantau coefficient de frottement. La formule de mecanique analytique
d
dt
(
∂L
∂θ
)
− ∂L
∂θ= Fθ
conduit a
mθ +mg sin θ = −bθ.
C’est une equation differentielle du second ordre qui se met sous la formed’etat (avec x1 = θ et x2 = θ) :
x1 = x2
x2 = −g sinx1 −b
mx2
On aimerait maintenant obtenir une conclusion quand a la stabilite asymp-totique de ce pendule en considerant une fonction de Lyapunov qui ne soitpas strictement decroissante.
Considerons, par exemple, la fonction d’energie complete du pendule
V = Ecin + Epot =1
2mθ2 +mg(1 − cos θ).
Cette fonction est positive pour autant que θ et le second terme ne s’an-nulent pas simultanement. Par consequent, V est nul pour
x =
(
θ
θ
)
=
(
0 + 2kπ0
)
avec k ∈ Z.

4.13 Theoreme d’invariance de LaSalle 89
Le systeme dynamique s’ecrit x = f(x) avec
f1(x) = θ
f2(x) = −g sin θ − b/mθ,
de telle sorte que
V (x) =∂V
∂xf = mθ(−g sin θ − b/mθ) −mg sin θθ = −bθ2 ≤ 0.
Il faut insister sur le fait que l’inegalite ci-dessus n’est pas stricte etantdonne que θ2 ne penalise qu’une partie de l’etat, a savoir θ ; θ n’apparaıt pasa gauche de l’inegalite.
Par consequent, dans un voisinage de l’origine, les conditions de stabilites
1. V (x) = 0, x = 0
2. V (x) > 0, x 6= 0
3. V ≤ 0
sont satisfaites. Le systeme est donc localement stable.
Toutefois, le theoreme de Lyapunov n’est pas conclusif quant a la stabilitelocale asymptotique, etant donne que V n’est pas strictement decroissante etque V ne s’annule pas uniquement au point 0, 0.
Toutefois, nous pouvons examiner l’ensemble R pour lequel V = 0. CommeV = −bθ2 = −bx2
2, l’ensemble R = x1, x2 | x2 = 0 est une droite horizon-tale passant par l’origine.
Afin d’obtenir le plus grand ensemble invariant M contenu dans R, il estnecessaire et suffisant que le vecteur f(x) definissant la dynamique soit tangentou nul a cet axe horizontal. En d’autres termes, la seconde composante de f(x),c.-a-d f2(x), doit etre nulle. On obtient la condition g sinx1 = 0, conduisanta une multitudes de points isole θ = 0, θ = kπ avec k ∈ Z.
La figure 4.21 represente les courbes de niveau de la fonction de Lyapunov,ainsi que les solutions pour deux valeurs du coefficient de frottement (b = 0et b = 1). La masse est m = 1 et la gravite est egale a g = 10.
L’axe horizontal R est represente, lequel contient les points constituantl’ensemble invariant M inclut dans R. Ces points sont separes en deux classes.Les points associes au minimum de V sont representes en blanc et corres-pondent aux equilibres stables ; ceux representes en noir sont associes auxpoints selles de la fonction V , et correspondent a des points d’equilibre in-stable.
En effet, le gradient
∇V =(
mg sin(θ) mθ)
,
s’annule aux points θ = kπ, k ∈ Z, θ = 0. Localement, autour de ces points,V est approxime par

90 4 Stabilite au sens de Lyapunov
-10 -5 0 5 10
-10
-5
0
5
10
-10 -5 0 5 10
-10
-5
0
5
10
Fig. 4.21. Plan de phase (θ selon l’axe horizontal et θ selon la verticale), et lignesde contour de la fonction de Lyapunov pour le pendule. A gauche, le frottement estnon nul. L’ensemble R pour lequle V = 0 est represente en jaune et le plus grandinvariant M correspond aux points blancs (minimum de V ), et aux points noirs(extremum de V , points selle). A droite, le frottement est nul. Des solutions pourdes choix de conditions initiales differentes sont egalement representees.
V ≈(
(θ − θ) θ)T
∂∇V∂θ
∣
∣
θ=θ,θ=0
∂∇V∂θ
∣
∣
∣
θ=θ,θ=0
(
θ − θ
θ
)
=(
(θ − θ) θ)T(
mg cos θ 00 m
)(
θ − θ
θ
)
. (4.6)
Aux valeurs θ = 2kπ, la matrice dans l’expression (4.6) est l’identite et lesdeux valeurs propres sont egales a 1 ; c’est un minimum (points blancs). Auxvaleurs θ = 2kπ+π, la matrice a une valeur propre negative −1 et une valeurpropre positive +1 ; c’est un point selle (points noirs).
Dans la partie droite de la figure 4.21, le frottement est nul de telle sorteque V = 0. Dans ce cas, chaque courbe de niveau de V est invariante. Etantdonne que certaines de ces courbes de niveau ne sont pas fermees, le systemen’est pas globalement stable. Neanmoins, l’origine est localement stable (maispas asymptotiquement). En effet, dans un voisinage de l’origine, les courbesde niveau sont fermees et constituent des cycles.
Pour V ≤ 0 (frottement non nul, partie de gauche de la figure 4.21), letheoreme d’invariance est applique en considerant divers ensembles compactsΩl (fermes et bornes) pour lesquels V est inferieur ou egal a la quantite l.Lorsque V est superieur a la valeur atteinte a un des points selles, les ensemblesΩl ne sont plus compacts. Le bord de Ωl est alors constitue par les courbesde niveau non fermees de V . Par contre, en prenant l < mg, par exemple

4.14 Methodes de construction des fonctions de Lyapunov 91
l = mg − ǫ, l’ensemble
Ωmg−ǫ = θ, θ|V (θ, θ) ≤ mg − ǫ, θ ∈] − π, π[
est compact, invariant (parce que V ≤ 0), et l’ensemble R ∩ Ωmg−ǫ ne com-porte qu’un seul point qui est l’origine 0. L’origine est stable par rapport acet ensemble de conditions initiales, mais elle n’est pas globalement stable,etant donne que lorsque la condition initiale n’appartient pas a cet ensemble,il n’est pas possible de connaıtre a priori vers quel point d’equilibre le systemeconvergera, en se fondant uniquement sur la fonction de Lyapunov et ses pro-prietes.
Toutefois, il est garantit que, globalement, le systeme converge vers undes points d’equilibre. En effet, lorsque θ0 et θ0 sont des valeurs initialesquelconques, un ensemble invariant compact contenant cette condition initialepeut etre construit. Cet ensemble contient alors plusieurs points d’equilibre, etla conclusion suit du theoreme d’invariance. En effet, le fait que V s’annule enplusieurs points d’equilibre n’a pas de consequence, etant donne que V n’estpas exige etre positif defini. Seule la condition de bornitude est necessaire, cequi est le cas dans un compact donne (c.-a-d. ∃c > 0, c ∈ R tel que V < c).
Cet argument inductif concernant la stabilite globale permet egalement des’affranchir du fait facheux que la fonction V n’est pas bornee radialementcomme le constat de l’existence de courbes de niveau non fermees nous l’ademontre.
4.14 Methodes de construction des fonctions de
Lyapunov
La presente section presente trois methodes de construction de fonctionsde Lyapunov. Le trait commun de ces methodes (et du reste de toutesles methodes de construction de fontion de Lyapunov) est de proceder parconstruction/correction et essais/erreurs. En d’autres termes, il n’y pas demethode constructive directe a proprement dit. Il s’agit de proceder demaniere iterative en alternant entre, d’une part, imposer la premiere conditionde positivite de la fonction de Lyapunov, et, d’autre part, imposer la secondecondition concernant la decroissance le long des solutions de la fonction deLyapunov.

92 4 Stabilite au sens de Lyapunov
4.14.1 Methode de Krasovskii
La premiere methode est celle de Krasovskii.
Theoreme 4.26. Soit x = f(x) tel que f(0) = 0. Definissons :
A(x) =∂f
∂x.
S’il existe un ouvert Ω ⊆ RN contenant l’origine 0 ∈ Ω, et que la ma-trice F (x) = A(x) + A(x)T < 0 est definie negative dans l’ouvert Ω (c.-a-d.xTF (x)x < 0, ∀x 6= 0, x ∈ Ω) alors la fonction
V (x) = f(x)T f(x).
est une fonction de Lyapunov et l’origine 0 est localement asymptotiquementstable. Si de plus Ω = Rn et V (x) → ∞ lorsque ‖x‖ → ∞, alors x = 0 estglobalement asymptotiquement stable.
Ce theoreme admet une certaine generalisation en considerant une equationde Lypaunov pour la matrice F (x).
Theoreme 4.27. S’il existe un ouvert Ω ⊆ Rn, ainsi que deux matricesdefinies positive P > 0 et ∃Q > 0 telles que ∀x 6= 0, x ∈ Ω il est vraique
F (x) = A(x)TP + PA(x) +Q < 0
est une matrice definie negative, alors
V (x) = f(x)TPf(x)
est une fonction de Lyapunov, et 0 est localement asymptotiquement stable..Si de plus Ω = Rn et V (x) → ∞ lorsque ‖x‖ → ∞, l’origine 0 est globalementasymptotiquement stable.
4.15 Methode du gradient variable
Si l’on connaıt a la foir le gradient de la fonction de Lyapunov et la fonctionde Lyapunov a proprement dit, la relation
V (x) =
∫ x
0
∇V (ξ)dξ
est valable entre ces deux quantites. Nous verrons dans le chapitre 6, quele gradient est une 1-forme que l’on ecrit egalement sous la forme dV ou laparametrisation ξ n’est pas explicitment mentionee. Ainsi,

4.15 Methode du gradient variable 93
V =
∫
dV,
ce qui devient une notation tout a fait explicite.
Toutefois, tout vecteur ligne ne peut provenir d’un gradient. Nous dis-tinguerons (i) un vecteur ligne qui est issu directement d’une fonction parderivation (1-forme exacte) ; (ii) un vecteur ligne qui, une fois multiplie parune fonction arbitraire, devient une 1-forme exacte (1-forme integrable) ; etfinalement (iii) un vecteur ligne quelconque (une 1-forme quelconque). Parconsequent, il faut que les composantes respectent certaines conditions entreelles pour pouvoir provenir d’un gradient. Ce sont les conditions d’exactitude.
Ainsi, on commence par parametriser∇V plutot que V , ∇V = [∇V1,∇V2]T .
(dV plutot que V ).
∇V1 = a11(x1, x2)x1 + a12(x1, x2)x2
∇V2 = a21(x1, x2)x1 + a22(x1, x2)x2
Ensuite, il faut respecter les conditions d’integrabilite (ddV ∧dV = 0, voirle chapitre 6) qui s’ecrit dans notre cas
∂∇Vi∂xj
=∂∇Vj∂xi
(∗)
Tout en respectant ces conditions, on choisit la parametrisation pourrendre negatif la derivee de la fonction de Lyapunov
V < 0.
Ensuite, on remonte a la fonction de Lyapunov en integrant le grandient∇V le long d’un contour quelconque.
Comme la 1-forme est une differentielle exacte (voir chapitre 6), le pro-cessus d’inegration ne depend pas du chemin d’integration choisit (en effet,la fonction ne change pas de valeur selon le chemin emprunte, seul compte lepoint d’arrivee qui determine la valeur de celle-ci). En consequence, il est pos-sible de figer certaines quantites a zero en choisissant un chemin d’integrationparticulier
V (x) =
∫ x1
0
∇V1(ξ1, 0, . . . , 0)dξ1 +
∫ x2
0
∇V2(x1, ξ2, 0, . . . , 0)dξ2 +
. . .+ . . .+∫ xn
0
∇Vn(x1, x2, . . . , ξn)dξn

94 4 Stabilite au sens de Lyapunov
Finalement, la nature definie positive de la fonction V est verifiee (c.-a-d.V > 0).
Exemple 4.28. Soit le systeme dynamique
x1 = x2
x2 = −x21 − x2
Pour obtenir une fonction de Lyapunov, nous commencons par parametrerson gradient. Pour simplifier quelque peu la tache, nous choisissons des com-binaisons lineaires de l’etat pour chacune des deux composantes du gradient.Par consequent,
∇V =(
a11x1 + a12x2 a21x1 + a22x2
)
.
La condition d’exactitude (integrabilite ”renforcee”, voir le chapitre sur lageometrie) s’ecrit
∂∇V1
x2=∂∇V2
x1a12 = a21.
Maintenant, la negativite de la derivee de la fonction de Lyapunov (ladeuxieme condition) est imposee :
V = ∇V f = a11x1x2 + a12x22 + (a12x1 + a22x2)(−x2
1 − x2)
= −(a22 − a12)x22 − (a12 + a22x
22)x
21 + a11x1x2 − a12x1x2
En choisissant a12 < a22 et a22 > 0, le terme resultant en x22 est negatif.
Toutefois, il demeure deux termes dont le signe est indefini, a savoir a11x1x2−a12x1x2. En forcant l’egalite a11 = a12, ils ne contribuent plus a la derivee.Il ne reste plus qu’a discuter du signe du coefficient devant x2
1. Ce facteur(a12 + a22x
22) doit etre positif. Ceci est garantit pour autant que a12 > 0.
En resume nous avons les conditions a11 = a12 = a21, a22 > 0, a12 > 0 eta12 < a22 ; la fonction de Lyapunov devenant apres integration et a un facteur1/2 pres :
V = a12x21 + 2a12x1x2 + a22x
22.
Il ne reste plus qu’a forcer la premiere condition, c.-a-d. la positivite de V . Lafonction V est factorisee pour faire apparaıtre une matrice symetrique
V =(
x1 x2
)
(
a12 a12
a12 a22
)(
x1
x2
)
.
Pour garantir que la matrice centrale soit definie positive, il suffit que ses deuxmineurs soient plus grand que zero. Le premier est a12 qui est plus grand que

4.17 Resultat d’instabilite 2 95
zero. Le second a12a22 − a212 = a12(a22 − a12) > 0 conduit a ce que a22 > a12,
condition deja rencontree pour forcer la premiere condition. V est donc bienune fonction de Lyapunov car elle satisfait simultanement aux deux conditions
V > 0, x 6= 0 et V < 0.
4.16 Resultat d’instabilite 1
Determiner l’instabilite peut etre aussi important que d’etablir la stabilite.Cependant, la tache est parfois plus simple etant donne qu’il suffit d’exhiberune condition initiale qui conduit a une trajectoire qui sort de la boule d’exi-gence de rayon R, plutot que de garantir que toutes les trajectoires demeurentdans la boule R pour une sous-boule (de rayon r) de conditions initiales,comme cela etait le cas pour la stabilite.
Nous presenterons trois resultats permettant d’identifier si un systeme estinstable. Le premier consiste a verifier que V croit, quelles que soient lesconditions initiales.
Theoreme 4.29.– ∃Ω ⊆ Rn, 0 ∈ Ω, V (0) ≥ 0 et V (x) > 0 ∀x ∈ Ω, x 6= 0– ddtV (x) > 0, ∀x ∈ Ω, x 6= 0
⇒0 est instable
La premiere condition (V (x) > 0) est de garantir la positivite de la fonctionde test, et la seconde consiste a verifier que cette fonction croit le long dessolutions (V > 0).
4.17 Resultat d’instabilite 2
Le second resultat particularise quelque peu les conditions et permet dedetecter une plus large classe de systemes instables que le premier resultat.
Theoreme 4.30. – ∃Ω ⊆ Rn, 0 ∈ Ω, V (0) ≥ 0 et V (x) > 0 ∀x ∈ Ω\0– ∃λ > 0, d
dtV (x) − λV (x) ≥ 0, ∀x ∈ Ω
⇒0 est instable
La seconde condition introduit un test indirect qui consiste a exprimer laderivee en utilisant la fonction V elle-meme. Comme cette fonction est scalaire,on aboutit a une equation differentielle avec un seul etat V . Si le facteur deproportionnalite λ est plus grand que zero, cela conduit a une croissance deV et donc a une instabilite.

96 4 Stabilite au sens de Lyapunov
4.18 Resultat d’instabilite 3 : th. de Chetaev
Comme mentionne plus haut, la condition de stabilite exige que quel quesoit la condition initiale x0 appartenant a la boule Br la trajectoire resultantereste comprise dans la boule d’exigence BR et ce, quel que soit la boule d’exi-gence choisie. Par consequent, il suffit d’exhiber une seule condition initialepar boule Br de taille suffisamment petite, pour laquelle la trajectoire dusysteme sorte d’une certaine boule d’exigence BR.
Le theoreme de Chetaev permet d’aborder l’instabilite selon cet angle.L’idee consiste a envisager une region ressemblant a une sorte de tranche degateauΩl pour laquelle le candidat de Lyapunov V (on devrait dire le candidatde la fonction Chetaev) s’annule sur la partie de la tranche de gateau qui estcoupee (V (x) = 0 pour x ∈ ∂Ωl) ; et qui est croissante dans cette region(V > 0). Pour les systemes dont la dimention de l’etat est plus grande quedeux, une image de ”cone” generalise la notion de ”tranche de gateau”. Lafigure 4.22 illustre le concept.
Theoreme 4.31. (Chetaev) ∃Ω ⊆ Rn et ∃Ωl ⊂ Ω– V (x) > 0, ∀x ∈ Ωl– ddtV (x) > 0, ∀x ∈ Ωl
– 0 ∈ ∂Ωl– V (x) = 0, ∀x ∈ ∂Ωl
⇒0 est instable
Ω
Ωl
x1
x2
0
∂Ωl
Fig. 4.22. Figure illustrant le theoreme de Chetaev
Preuve. L’explication consiste a remarquer que, d’une part, par le fait queV est force de s’annuler sur les cotes de la tranche de gateau (V (x) = 0

4.19 Techniques de comparaison et majoration 97
∀x ∈ ∂Ωl) et, d’autre part, comme la fonction V est croissante par hypothesesur l’ensemble de la tranche (V > 0, ∀x ∈ Ωl), il est impossible que lestrajectoires du systeme (celles commencant a l’interieure de la tranche Ωl)sortent de la region bleue par les cotes ∂Ωl (en rouge). Pourtant, il se pour-rait qu’elles restent piegees a l’interieure de la region bleue Ωl. Nous allonsneanmoins montrer qu’il existe une certaine boule d’exigence suffisammentpetite BR pour laquelle les trajectoires issues de l’intersection Ωl ∩BR sortentde la boule BR. En chosissant le rayon R suffisamment petit (ce qui n’estnullement interdit et n’impose aucune condition supplementaire), V est ga-rantie bornee superieurement a l’interieure de la region Ωl ∩ BR, i.e ∃v ∈ R,0 < v < ∞, V (x) < v, ∀x ∈ Ωl ∩ BR. Ceci est rendu possible par le fait quela fonction V est continue et s’annule a l’origine par hypothese. D’autre part,et egalement par hypothese, V est strictement croissante dans cette regionle long des solutions du systeme. Ainsi, en supposant que les trajectoires nesortent pas de BR, la fonction V evaluee le long de ces trajectoires (etantstrictement croissante) finirait par depasser la borne v en question, condui-sant a une contradiction. En consequence, toute trajectoire commencant dansla region Ωl∩BR, (et en particulier pour une condition initiale arbitrairementproche du point d’equilibre), finit par quitter la boule d’exigence BR, exhibantde la sorte l’instabilite.
4.19 Techniques de comparaison et majoration
Nous presentons dans cette section diverses techniques directes et indi-rectes de majoration permettant de deduire la deuxieme condition V ≤ 0 dutheoreme de stabilite de Lyapunov. Certaines de ces techniques, comme l’uti-lisation d’inegalites classiques ou le developpement limite, rendent egalementpossible la verification de la nature definie positive du candidat de LyapunovV (x), c.-a-d. la premiere condition de la defnition 4.10, au moins dans unvoisinage. De plus, en renversant les inegalites, les resultats sont egalementapplicables pour tester l’instabilite.
Determiner la stabilite par l’entremise d’un candidat de Lyapunov necessitede tester la decroissance de la fonction V :
V ≤ 0 (4.7)
En effet, la deuxieme condition de la definition 4.10 impose de verifier cetteinegalite.
Malgre l’apparente simplicite de cette condition, un calcul direct a partirde la fonction V (x) et de la dynamique f(x) conduit a une egalite
V = m(x),
ou m(x) est une certaine fonction non-lineaire de x, ne permettant pas tou-jours d’etablir facilement ce resultat.

98 4 Stabilite au sens de Lyapunov
Afin de verifierm(x) ≤ 0, (4.8)
la fonction m(x) est alors majoree par une nouvelle quantite
m(x) > m(x),
dont l’expression, plus simple, permet de deduire m(x) ≤ 0, et donc egalement(4.8) et (4.7).
4.19.1 Les formes quadratiques
Pour les systemes lineaires x = Ax, nous avons vu a la section ?? que, , lafonction de Lyapunov, ainsi que sa derivee, admettent une forme quadratiqueV = xTPx et V = −xTQx, ou P et Q sont des matrices reelles symetriquesdefinies positives.
Cependant, l’utilisation des matrices definies positives est egalement ap-plicable au cas non lineaire x = f(x) a la fois pour estimer la fonction deLyapunov V et sa derivee. En effet, nous verrons qu’un developpement limitecaracterise localement ces fonctions par la presence de formes quadratiquesdefinies positives et semi-definies positives.
Nous rappelons quelque proprietes des matrices reelles symetriques definiespositives et semi-definies positives.
Definition 4.32. Une matrice P dont les coefficients sont reels est dite stric-tement reelle symetrique positive definie lorsque les deux conditions
1. P = PT
2. xTPx > 0, ∀x 6= 0.
sont satisfaites.
Dans le cas d’une inegalite faible xTPx ≥ 0, la matrice P est dite positivesemi-definie.
Lemme 4.33. Les valeurs propres λ1, . . ., λn d’une matrice symetrique definie(respectivement semi-definie) positive P sont toutes reelles λi ∈ R, i =1, . . . , n, et positives 0 < λ1 ≤ λ2 ≤ . . . ≤ λn (resp. non negatives,0 ≤ λ1 ≤ λ2 ≤ . . . ≤ λn).
Preuve. Soit v un vecteur propre de norme unite associe a une des valeurspropres que l’on notera λ. Comme par definition la matrice P est symetriquedefinie (resp. semi-definie) positive, la valeur xTPx est un nombre reel positif(resp. non negatif). Ceci est en particulier vrai pour x = v. Par consequent,comme
vTPv = vT (λP )v = λvT v = λ,
toutes les valeurs propres λ sont reelles et positives (resp. reelles et nonnegatives).

4.19 Techniques de comparaison et majoration 99
Lemme 4.34. Si les valeurs propres λi et λj sont distinctes (λi 6= λj), alorsles vecteurs propres vi et vj associes a ces valeurs propres (Pvi = λivi etPvj = λjvj) sont orthogonaux :
vTi vj = 0 i 6= j, λi 6= λj .
Preuve. Supposons que vTi vj 6= 0 et λi 6= λj . Comme vj est associe a λj
vTi vj =1
λjvTi (λjvj) =
1
λjvTi (Pvj). (4.9)
Comme vi est associe a λi,
vTi vj =1
λi(vTi P
T )vj . (4.10)
Etant donne que P est symetrique, les deux egalites (4.9) et (4.10) entraınentλi = λj , conduit a une contradiction ce qui implique vTi vj = 0 des lors queλi 6= λj .
4.19.2 Inflation et deflation
Les deux lemmes 4.33 et 4.34 conduisent alors a une representation men-tale d’une matrice definie positive par une sorte de ”ballon de rugby” a n-dimensions. En consequence, il est possible d’englober le ballon de rugby parun ballon homogene (en considerant l’axe le plus grand du ballon de rugby),et egalement d’y inscrire un ballon homogene a l’interieur du ballon de rugby(en considerant l’axe le plus petit du ballon de rugby).
Lemme 4.35. Soit P > 0 une matrice reelle symetrique definie positive. Ilexiste deux constantes reelles c, C ∈ R telle que
cxTx ≤ xTPx ≤ CxTx.
De plus, c = λ1 (la plus petite valeur propre de P ) et C = λn (la plus grandevaleur propre de P ).
Preuve. Le lemme 4.34 garantit l’existence d’une base orthonormee de vec-teurs propres vi a partir de laquelle la decomposition de x =
∑ni=1 αivi conduit
a
xTPx = (n∑
i=1
αivi)TP (
n∑
i=1
αivi)
= (
n∑
i=1
αivi)T (
n∑
i=1
λiαivi).

100 4 Stabilite au sens de Lyapunov
En tenant compte de l’orthonormalite des vecteurs propres choisis (vTi vj = 0,i 6= j et ‖vi‖ = 1),
xTPx =
n∑
i=1
λiα2i , (4.11)
et en remarquant∑n
i=1 α2i = xTx, la propriete 0 < λ1 ≤ λi ≤ λn, garantie
par le lemme 4.33, demontre les inegalites a partir de (4.11).
Remarque 4.36. Le fait que les vecteurs propres sont orthogonaux permetd’eliminer les produits croises vTi vj , i 6= j. De plus, le plus grand axe du ballonde rugby correspond a la plus petite valeur propre λ1. En effet, 1/c = 1/λ1
correspond au rayon du grand ballon homogene xTx = 1λ1
englobant le ballon
de rugby xTPx = 1. De meme, 1/C = 1/λn correspond au rayon du petitballon homogene xTx = 1
λninscrit a l’interieur du ballon de rugby xTPx = 1.
4.19.3 Le developpement limite
Lorsque la fonction V admet un developpement en serie, il est possibled’exprimer
V = −n∑
i=1
n∑
j=1
aijxixj +R3(x) +R4(x) + . . .+Rn(x) + . . . (4.12)
ou les monomes du second ordre ont ete mis en evidence par rapport a ceuxd’ordres superieurs regroupes dans Ri, i = 1, . . . ,∞.
Par convention, les degres des de tous les monomes de Ri sont de degreexactement egal a i (doRi = i).
Les techniques de developpement se fondent alors sur le fait que si lamatrice A = (aij) est definie positive, alors il existe une certaine constantec > 0, c ∈ R, telle que
V < 0 ∀‖x‖ ≤ c.
En effet, les termes pouvant changer le signe de V sont tous dans un desfacteurs Ri. A cause du degre, tous les monomes associes disons cxixjxk . . . xlpeuvent etre factorises sous la forme c(xixj)xk . . . xl avec xixj un des monomeapparaissant dans la forme quadratique xTAx. En choisissant ‖x‖ suffisamentpetit le facteur cxk . . . xl devient alors negligeable par rapport au coefficient aijde telle sorte que le terme xTAx domine par rapport au terme de perturbation∑
iRi.
4.19.4 La reintroduction de V
Le resultat d’instabilite 2 (theoreme 4.30) est fonde sur la comparaisonentre la fonction V et V elle-meme. Si la derivee de la quantite V est pro-

4.19 Techniques de comparaison et majoration 101
portionnelle (avec un facteur positif) a cette quantite V , alors cette quantiteaugmente exponentiellement.
Il est ainsi interessant, une fois le calcul de V = m(x) effectue, d’essayerde reintroduire l’expression de V dans m(x). Si cela est possible, alors, enfonction du coefficient devant la fonction de V , cette quantite peut decroıtreau cours du temps.
Lemme 4.37. Soit V une fonction definie positive quelconque (V (x) > 0,∀x 6= 0, V (0) = 0) telle que
V =∂V
∂xf(x) = αV,
avec α ∈ R, alorsV (t) = V0e
αt.
Si α < 0, le systeme x = f(x) est asymptotiquement stable.
Preuve. En derivant par rapport au temps V (t) = V0eαt, l’expression V = αV
est verifiee. L’expression V0eαt conduit a ce que, lorsque α < 0, V (x(t)) → 0,
et donc que x(t) → 0 lorsque t→ ∞.
4.19.5 L’equation integrale associee
Sous certaines conditions de continuite (que nous avons admises dans l’in-troduction), l’equation differentielle ordinaire
x = f(x), x(0) = x0,
donne lieu a une representation equivalente sous forme d’equation integrale
x(t) =
∫ t
τ=0
f(τ)dτ
x(0) = x0.
Par consequent, des inegalites et des majorations sont applicables al’integrale, afin d’estimer les solutions de l’equation differentielle.
Ce procede s’applique egalement aux inegalites differentielles, lorsque lafonction V apparaıt de part et d’autre de l’inegalite. Elle est alors convertieen inegalite, ou la differentielle disparaıt au profit de l’integrale.
Par exemple, en considerant une fonction V ,
V ≤ αV
devient

102 4 Stabilite au sens de Lyapunov
V (t) ≤ V (0) + α
∫ t
0
V (τ)dτ, (4.13)
quel que soit le signe de α ∈ R.
De memeV ≤ g(V )
devient
V (t) ≤ V (0) +
∫ t
0
g(V (τ))dτ. (4.14)
Ce type de conversion permet alors d’utiliser les proprietes des inegalitesintegrales du genre (4.13) et (4.14) afin de trouver des estimations pour lafonction V .
En particulier, l’apparition de V a la fois a gauche de (4.13) et a droite,sous le signe d’integration, rend l’estimation difficile. C’est pourquoi l’isolationde V d’un seul cote de l’inegalite est tres commode.
Lemme 4.38. Soit m(.) et v(.) des fonctions continues non negatives de R+
dans R+, et c ∈ R un nombre reel non negatif c ≥ 0.
Si
m(t) ≤ c+
∫ t
0
v(τ)m(τ)dτ, t ≥ 0, (4.15)
alors
m(t) ≤ c exp
(∫ t
0
v(τ)dτ
)
. (4.16)
Remarque 4.39. Ce lemme permet d’isoler m(.), apparaissant des deux cotede l’inegalite, dans le membre de gauche de l’inegalite, et sans le symboled’integration. Ce lemme et ceux de cette section sont appeles lemmes de (type)Bellman-Gronwall.
Preuve. En multipliant (4.15) par la valeur non negative v(t) de part et d’autrede l’inegalite, l’inegalite ne change pas de sens
m(t)v(t) ≤ v(t)
[
c+
∫ t
0
v(τ)m(τ)dτ
]
,
Lorsque c > 0, le facteur entre crochets est strictement positif, de telle sortequ’en divisant des deux cotes par cette expression non nulle, l’inegalite nechange egalement pas de sens
m(t)v(t)
c+∫ t
0v(τ)m(τ)dτ
≤ v(t), (4.17)
Maintenant, une integration directe conduit a

4.19 Techniques de comparaison et majoration 103
log
(
c+
∫ t
0
v(τ)m(τ)dτ
)
− log c ≤∫ T
0
v(τ)dτ
entraınant (4.16).
Pour le cas c = 0, nous pouvons appliquer le resultat valable pour c > 0en choisissant une suite decroissante de nombre positif ǫi > 0 en posant suc-cessivement c = ǫi de telle sorte que (4.15) est valable pour tous ces choix.En passant a la limite ǫ → 0, nous obtenons m(.) = 0 identiquement, ce quidemontre le lemme.
Lorsque le nombre c depend explicitement du temps, le lemme devient
Lemme 4.40. Soit m(.), v(.) et h(.) des fonctions continues non negative deR+ dans R+,
Si
m(t) ≤ h(t) +
∫ t
0
v(τ)m(τ)dτ, t ≥ 0 (4.18)
alors
m(t) ≤ h(t) +
∫ t
0
v(τ)h(τ) exp
(∫ t
τ
v(ξ)dξ
)
dτ. (4.19)
De plus si h(.) est derivable,
m(t) ≤ h(0) exp
(∫ t
0
v(τ)dτ
)
+
∫ t
0
h′(τ) exp
(∫ t
s
v(ξ)dξ
)
dτ.
Pour une demonstration, le lecteur est invite a consulter [LLM89]. Toutcomme dans [LL69], on y trouvera egalement d’autres inegalites de ce type.
4.19.6 Quelques inegalites standards
Etant donne que des inegalites souvent complexes doivent etre manipulees,faisant intervenir des operateurs differentiels et integraux, il est utile d’utiliserdes resultats classiques afin de majorer (ou minorer selon le cas) les inegalitesplus compliquees a l’aide de celles utilisant des expressions arithmetiquessimples.
C’est pourquoi nous presentons essentiellement trois types d’inegalites ap-paraissant tres souvent en pratique pour etablir des resultats de stabilite encommande non lineaire.
Inegalite de Cauchy-Schwarz
Cette inegalite decoule du produit scalaire existant dans un espace vecto-riel et provient du fait que | sin(α) |≤ 1 pour tout α ∈ R.

104 4 Stabilite au sens de Lyapunov
Lemme 4.41. Soit x =(
x1 x2 . . . xn)n
un vecteur d’un espace vectoriel V .
En definissant, ‖x‖ =√xTx, alors
| xT y |≤ ‖x‖‖y‖.
Inegalite du triangle
C’est la generalisation en dimension n de la propriete que la somme deslongueurs des cotes adjacents d’un triangle est toujours plus grande que lalongeur du cote restant. A nouveau, nous nous placons dans un espace vectorielquelconque.
Lemme 4.42. Soit x et y deux vecteurs non nuls d’un espace vectoriel V .Nous avons
‖x‖ + ‖y‖ ≥ ‖ ± x± y ‖.Les signes devant les vecteurs x et y n’ont pas d’importance dans le membrede droite.
Inegalite arithmetique-geometrique
La moyenne arithmetique 1n (x1 + x1 + . . . + xn), est toujours au moins
egale a la moyenne geometrique n√x1 · x2 · . . . · xn :
Lemme 4.43. Soit xi ∈ R∗+, i = 1, . . . , n, une suite finie de nombre reels non
negatifs.
1
n
n∑
i=1
xi ≥ n
√
√
√
√
n∏
i=1
xi. (4.20)
Les deux moyennes, geometrique et arithmetique, sont des cas particuliersde moyenne Mf associee a une fonction f(x) dont on connaıt la fonctionreciproque f−1(x) :
Mf = f−1
(
1
n
n∑
i=1
f(xi)
)
.
Ainsi avec f(x) = x,Mx est la moyenne arithmetique, et avec f(x) = log(x),Mlog est la moyenne geometrique. L’inegalite (4.20) s’ecrit donc aussi
Mx ≥Mlog.

4.19 Techniques de comparaison et majoration 105
Exercices
4.1. Theoreme de Krasovskii,Demontrer les theoremes 4.26 et 4.27
4.2. Grue a portique 2D1
On considere une grue planaire a portique. Le chariot comporte une poulieguidant le cable principal qui relie le moteur de treuillage (moteur principalfixe sur la structure fixe) a la charge. Le chariot superieur peut egalement sedeplacer sous l’action d’un autre cable reliant le chariot au moteur secondaire(ce dernier est egalement monte sur la structure fixe). La charge peut ainsise deplacer dans le plan. La longueur du cable de treuillage est R et celui ducable secondaire L.
(i) Dessiner le systeme. Considerer tous les parametres comme des valeursnormalisees a un.
(ii) Etablir le modele dynamique en se fondant sur l’hypothese que lescables sont infiniment rigides et qu’ils peuvent transmettre a la fois les forcesnegatives et positives (en realite un cable ne peut que transmettre la forcedans un seul sens, l’autre conduirait le cable a etre detendu). Les deux moteurssont supposes ideaux et transmettent chacun un couple pur instantanement.L’entree du premier moteur est le couple τ1 et celle du moteur secondaire τ2.
(iii) Poser comme loi de commande
τ1 = 1 − 2R+ (R−R)
τ2 = 1 − 2L+ (L− L)
ou R, L ∈ R sont des nombre reels fixes. Le terme 1 est necessaire pourcompenser la force due a la gravite (toutes les constantes sont normalisee enparticulier g = 1 et m = 1, ainsi que les rayons des poulies).
(iv) Trouver le point d’equilibre naturel. En existe-t-il d’autres ?
(v) Demontrer en linearisant par la methode du developpement de Taylor(cf. chapitre sur la linearisation si necessaire) que le systeme est localementexponentiellement stable.
(vi) Pour augementer le domaine de stabilite, considerer la fonction
V = Ec + Ep + (R − R)2 + (L − L)2 +R+ L,
ou Ec est l’energie cinetique du systeme et Ep est l’energie potentielle. Est-ceque cette fonction est positive a l’exterieur du point d’equilibre ?
(vii) Montrer que V ≤ 0.
1 Ce probleme est une adaptation de l’article de B. Kiss, J. Levine, J. et Ph.Mullhaupt A Simple Output Feedback PD Controller for Nonlinear Cranes, Proc.39th IEEE Conference on Decision and Control, Sydney, Australia, December2000, pp. 5097-5101.
106 4 Stabilite au sens de Lyapunov
(viii) Determiner l’ensemble V = 0.
(ix) Determiner le plus grand ensemble invariant compris dans cet en-semble.
(x) En deduire les proprietes de stabilite globale, en particulier est-ce quela fonction V est radialement non bornee ? Envisager divers compacts inva-riants Ω et verifier que V est bien borne inferieurement sur ces compacts. Enparticulier est-ce que V (x) ≤ l est-il un ensemble compact ?
(xi) Illustrer l’ensemble des resultats obtenus a l’aide de simulations.

5
Passivite
Le chapitre precedent a defini la stabilite de maniere formelle. Pourtant,l’application directe de la definition presentait des difficultes. La nature memede celle-ci rendait son traitement difficile ; mais surtout le besoin de connaıtrede maniere explicite la solution des equations differentielles representant lesysteme, a contraint de proceder par l’entremise d’une fonction supplementaire(seconde methode de Lyapunov). L’orgine de la reflexion etait liee a la fonctiond’energie. Un systeme etait stable lorsque, d’une part, la fonction d’energierepresente un minimum a l’equilibre et, d’autre part que cette fonction soit,soit conservee ou decroissante dans le temps. La stabilite asymptotique nepouvant pas decouler lorsque la fonction est conservee uniquement.
Le present chapitre consiste, en quelque sorte, a etendre le conceptd’energie a une plus large classe de systeme. Au chapitre precedent, seulesles dynamiques depourvues d’entree ont fait l’objet d’une etude detaillee. Ils’agit ici d’envisager la presence d’une entree u supplementaire, x = f(x, u).
La presence, a la fois d’une entree et d’une sortie de dimension compa-tible, complique cependant les interpretations. En effet, bien que l’energiepuisse avoir une tendance a decroıtre au cours du temps, il serait tout afait possible, en utilisant la nouvelle entree a disposition, de l’augmenter demaniere arbitraire. Par exemple, lors d’une connexion entre systemes, l’energiepeu passer d’un systeme a un autre suivant une sorte de resonance, bien quechaque systeme pris isolement fasse decroitre son energie propre lorsque laconnexion est rompue.
Toutefois, il existe une classe de systeme pour lesquels bons nombres dechoses se passent bien, en particulier un certain type de comportement setrouve maintenu quelles que soient les connexions. Cette particularite est re-marquable, mais impose des restrictions importantes. Ce sont d’une part, ladefinition de cette classe de systemes, ainsi que leurs proprietes et restrictions,qui seront maintenant etudiees.

108 5 Passivite
Lyapunov
Systeme sans entree : x = f(x) ddtV ≤ 0
Passivite
Systeme entree-sortie : x = f(x, u)
y = h(x)
ddtV ≤ Puissance Fournie
Tableau 5.1. Tableau distinctif pour la stabilite et la passivite.
5.1 Notion intuitive
Le systemex = f(x, u)
y = h(x, u)
possede a la fois une entree u et une sortie y = h(x, u). L’entree est utiliseepour injecter ou soutirer de la puissance. Un systeme est passif si lorsque dela puissance est soutiree, le soutirage se fait au detriment du stock interned’energie. Ainsi il ne peut pas y avoir de generation interne de puissance.
Ce stock est en quel que sorte l’analogue de la fonction de Lyapunov duchapitre precedent. On le notera egalement V .
5.2 Exemple de systeme statique passif
Les systemes passifs les plus simples sont ceux qui ne comportent pasde dynamique. La sortie est directement fonction de la valeur de la grandeurd’entree. Pour simplifier encore d’avantage la presentation, l’exemple considerecomporte une entree d’une seule dimension et une sortie d’une seule dimension.
Ainsi, pour que la puissance soit dissipee, il faut que le produit entreesortie, c’est-a-dire
ui
soit positif, afin que la puissance soit consommee et dissipee a chaque instantdans le systeme statique. L’exemple simple de la resistance electrique
u = Ri

5.4 Exemple de systeme dynamique passif 109
est donne a la figure 5.1 et illustre parfaitement ce cas de systeme.
Etant donne que le systeme est statique, la puissance est dissipee instan-tanement. Il n’y a pas la notion de stock interne de puissance. La fonction Vest absente dans ce cas.
u
i
u
i
Fig. 5.1. La resistance electrique est un systeme statique passif
Un simple calcul donne aisement
ui = Ri2
et confirme que la puissance instantanee est effectivement instantanementdissipee dans la resistance electrique.
5.3 Systeme statique passif
L’exemple de la simple resistance electrique peut s’etendre par analogiea une plus large classe de systemes. L’extension doit cependant prendre encompte la necessite de dissiper instantanement la puissance que donne lecouple entree-sortie. En consequence, il est imperatif que
uy = g, g > 0
lors de la presence d’un systeme statique passif.
Ceci signifie que la caracteristique statique doit necessairement se trouverdans le premier et le troisieme quadrant, conformement a ce qui est representea la figure 5.2.
5.4 Exemple de systeme dynamique passif
Lorsque le systeme comporte une partie dynamique, certaines variablesd’etat sont associees au systeme. Le produit de l’entree par la sortie uT y, nesuffit plus pour caracteriser la passivite.

110 5 Passivite
y
u
Fig. 5.2. Representation graphique d’un systeme passif statique : La caracteristiquedoit appartenir au secteur rerpesente en vert solide.
En effet, la puissance peut etre emaganisee dans les elements dynamiques.Elle peut egalement etre restituee a l’entree du systeme.
Pour mieux comprendre le phenomene, etudions un circuit electrique com-portant que des resistances, inductances et capacites. Le circuit est representea la figure 5.3.
u
il
C
L
uc
R1
R2
Fig. 5.3. Un circuit electrique RLC est un systeme dynamique passif.
Ce circuit peut recevoir de la puissance par l’entremise du couple entree-sortie u et i. Cette puissance est alors dissipee partiellement dans les resistanceset stockee dans les deux elements C (capacite) et L (inductance). Le circuitpeut egalement fournir de la puissance en entree en diminuant sont stock in-terne d’energie, en diminuant soit la charge dans la capacite soit le champmagnetique dans la bobine. Soit donc la fonction de stockage
V =1
2Cu2
c +1
2Li2l
La dynamique du systeme est :
u = R1il + Ldildt
+ uc
i = Cducdt
+ uc1
R2

5.6 Proprietes 111
En posant x1 = il et x2 = uc on arrive a la representation d’etat
x1 =1
Lu− R1
Lx1 −
1
Lx2
x2 =1
Cx1 −
1
R2Cx2
On peut donc calculer l’evolution du stockage dans le temps :
V = Lx1x1 + Cx2x2
= ux1 −R2x21 − x1x2 + x2x1 −
1
R2x2
2
= ux1 −R2x21 −
1
R2x2
2
En considerant la sortie y = il = x1 :
V = uy − g(x), avec g(x) = R2x21 + 1
R2x2
2
Ainsi la puissance en entree est
– soit stockee– soit dissipee
5.5 Definition differentielle de la passivite
L’exemple precedent rend possible une extension mathematique de la no-tion de passivite, tout comme cela a ete le cas lors de la generalisation de laresistance electrique a une plus large classe de systemes.
Definition 5.1. Soit le systeme,
x = f(x, u)
y = h(x)
S’il existe γ > −∞, V > γ, et,
V = uT y − g
avec g ≥ 0, alors le systeme est passif.
5.6 Proprietes
L’immense avantage des systemes passifs est leur plasticite lors de connexionen tout genre. En effet, ces systemes se comportent tres bien lors de connexion

112 5 Passivite
en serie, car les systemes agissent en quelque sorte independammant de leurconnexion. Mais ils se comportent egalement tres bien lors de connexion a lafois en parallele et en retroaction. Ce dernier cas est important lors d’associa-tion de sous-systemes passif en retour de sortie.
5.6.1 Connexion parallele
Lors d’une connexion parallele,
+
+
V1, g1
V2, g2
u1
u2
y1
y2
u y
chacun des deux systemes comporte une fonction de stockage interne V1
et V2 respectivement et obeit a la definition 5.1. Ceci donne,
V1 = uT1 y1 − g1
V2 = uT2 y2 − g2
V = V1 + V2 = uT1 y1 + uT2 y2 − g1 − g2
= uT y1 + uTy2 − g1 − g2
= uT (y1 + y2) − g1 − g2
V = uT y − g,
ou l’on a fait l’usage de la particularite de la connexion parallele. Le calculmontre donc que, si l’on considere V = V1+V2 comme fonction de stockage as-socie a l’assemblage constitue par la connexion en parallele des deux systemesindividuels, alors cet assemblage repond encore a la meme definition 5.1, enutilisant cette fois-ci V = V1 + V2 et g = g1 + g2. La passivite est doncmaintenue !

5.6 Proprietes 113
5.6.2 Connexion par retroaction
La connexion par retroaction est plus pernicieuse etant donne que les deuxsystemes interagissent d’amont en aval et ceci a l’infini. Soit donc la connexionpar retroaction negative,
-V1, g1
V2, g2
u1
y2
y1
u2
u y
pour laquelle chacun des sous-systemes constitutifs obeit a la definition5.1. En tenant compte de la particularite de la connexion,
V1 = uT1 y1 − g1
V2 = uT2 y2 − g2
V = V1 + V2 = uT1 y1 + uT2 y2 − g1 − g2
= (uT − yT2 )y1 + uT2 y2 − g1 − g2
= (uT − yT2 )y1 + yT1 y2 − g1 − g2
= uTy1 − yT2 y1 + yT1 y2 − g1 − g2
= uTy1 − g1 − g2
V = uTy − g.
Et la meme constatation que dans le cas de la connexion parallele estdeduite : Le systeme est passif avec comme fonction de stockage V = V1 + V2
et terme de dissipation g = g1 + g2.
Remarque 5.2. La propriete de maintenir la passivite apres connexion parretro-action negative de deux systeme passifs est extremement utile poursynthetiser des lois de commande. En effet, il est possible d’identifier dessous-systemes passifs dans un systeme a commander. Lorsque ceci n’est pasdirectement le cas, un bouclage partiel peut transformer une sous-partie enune sous-partie passive. Lorsque le systeme complet admet (apres bouclage)une decomposition en systemes passifs (chaque sous-systeme est connecte auxautres par connexion parallele, serie ou par retroaction negative) la stabilitesera garantie par les proprietes de connexion elaborees ci-dessus. Ceci per-met de constituer une fonction de Lyapunov compliquee a partir de fonctionsplus simples associees aux sous-parties passives. Nous examinerons de tellestechniques dans la section consacree a la synthese.

114 5 Passivite
5.6.3 Definition integrale de la passivite
Il est egalement possible de donner une definition equivalente de la passi-vite sous forme integrale ne faisant pas intervenir de notion differentielle.
Definition 5.3. S’il existe γ ∈ R, γ > −∞, V > γ et g ≥ 0 tel que si
V = uT y − g
ceci implique ∃α ∈ R, α > −∞∫ ∞
0
u(τ)T y(τ)dτ > α
alors le systeme est passif.
Remarque 5.4. Pour voir la correspondance entre les deux definitions, (il suffitde prendre g ≡ 0).
En fait, la definition integrale signifie qu’il est impossible en jouant surl’entree de rendre arbitrairement petit le stock interne d’energie. Ce stock estborne inferieurement.
Cette definition sera utilisee pour demontrer un lien important entre lapropriete de passivite et la caracteristique frequentielle associee aux systemeslineaires par l’entremise de l’identite de Perseval.
5.7 Passivite des systemes lineaires SISO
Les deux definitions de la passivite (definition 5.1 et 5.3), s’appliquent aussibien aux systemes lineaires que non-lineaires. Pour les systemes lineaires, cettepropriete peut se caracteriser en fonction de la caracteristique frequentielle.Soit une fonction de transfert donnee comme une fraction rationnelle en va-riable de Laplace s.
G(s) =bms
m + bm−1sm−1 + . . .+ b1s+ b0
sn + an−1sn−1 + . . .+ a1s+ a0
Il est possible de caracteriser la propriete de passivite en fonction de lareponse harmonique du systeme.
Theoreme 5.5. Le systeme G(s) = Y (s)U(s) est passif
⇔
ℜe[G(jω)] ≥ 0

5.7 Passivite des systemes lineaires SISO 115
Remarque 5.6. Le resultat du theoreme precedent n’a rien de surprenant si l’onconsidere un circuit electrique RLC, car le dephasage induit par un quelconqueassemblage de tels elements ne pourra jamais sortir de l’interval [−π
2 ; π2 ]. Leplus etonant est que ceci soit le cas, quel que soit le systeme passif.
Mentionnons, par ailleurs, que le probleme inverse est encore plus interessant :
Remarque 5.7. La synthese d’un systeme passif lineaire quelconque a l’aided’un reseau electrique comportant uniquement des elements R, L ou C estd’une complexite considerable. Ce probleme a occupe le centre de la scene dela recherche dans le domaine au cours des trois premiers quarts de siecles dusiecle dernier.
ℑ
ℜ
G(jω)
Fig. 5.4. Diagramme de Nyquist d’un systeme lineaire SISO passif.
Exemple 5.8. Afin de confirmer la precedente remarque, le circuit electriqueRLC est reconsidere. La fonction de transfert est
G(s) =I(s)
U(s)=
R2Cs+ 1
R2CLs2 + (R1R2C + L)s+R1 +R2
Les valeurs numeriques suivantes sont choisies : R1 = 1, R2 = 10, C = 2.4,L = 1.2.
Il est alors aise de constater que la partie reelle de la reponse harmoniqueest a partie reelle positive, exhibant ainsi rien d’autre que la propriete dessignaux periodiques de nature sinusoıdale d’etre dephase d’un angle de valeurabsolue toujours inferieure ou egale a π
2 .

116 5 Passivite
Real Axis
Imag
inar
y A
xis
Nyquist Diagrams
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
G(jω)
Fig. 5.5. Diagramme de Nyquist pour un exemple particulier de circuit electriquepassif.
5.7.1 Preuve du lien entre passivite et reponse harmoniquepositive reelle
Pour demontrer le lien, considerons les signaux representes a la figure 5.6.
Preuve.
τ t τ
u y
G(s)
Fig. 5.6. Illustration pour la demonstration de la passivite
Le systeme est soumis a un signal d’entree non nul sur un horizon temporelde o a τ . L’entree est nulle avant le temps initial t = 0 et ensuite abruptementarrete pour tout instant t superieur a τ . La sortie par contre n’a aucune raisonde revenir a zero pour tout instant superieur a τ .
La cle de la demonstration reside dans le fait que le bilan de puissancesur tout l’horizon temporel est egal au bilan sur tout le spectre. Le celebretheoreme de Perseval est donc utilise.

5.7 Passivite des systemes lineaires SISO 117
∫ ∞
0
u(τ)y(τ)dτ =
∫ ∞
−∞y(τ)u(τ)dτ
=1
2π
∫ ∞
−∞Y (jω)U∗(jω)dω (Perseval)
=1
2π
∫ ∞
−∞G(jω) | U(jω) |2 dω
=1
2π
∫ 0
−∞G(jω) | U(jω) |2 dω +
1
2π
∫ ∞
0
G(jω) | U(jω) |2 dω
=− 1
2π
∫ 0
∞G(−jω) |U(−jω) |2 dω+
1
2π
∫ ∞
0
G(jω) |U(jω) |2 dω
u(t) reel → U(jω) = U∗(−jω)| U(−jω) |2= U(−jω)U∗(−jω) = U∗(jω)U(jω) =| U(jω) |2
donc∫ ∞
0
u(τ)y(τ)dτ =1
2π
∫ ∞
0
G(−jω) | U(jω) |2 dω +1
2π
∫ ∞
0
G(jω) | U(jω) |2 dω
=1
π
∫ ∞
0
G(−jω) +G(jω)
2| U(jω) |2 dω
=1
π
∫ ∞
0
ℜe[G(jω)] |U(jω) |2 dω
ℜe[G(jω)] ≥ 0, ∀ω > 0 ⇒ ∫∞0 u(τ)T y(τ)dτ > α, α > −∞
La demonstration procede maintenant par l’absurde, c’est-a-dire que l’onsuppose que dans le systeme viole le principe que la partie reelle de la reponseharmonique puisse avoir une partie reelle negative. Ainsi supposons que dansla plage de frequence ∃ω1, ∃ω2 → ℜe[G(jω)] < 0 ∀ω ∈ (ω1;ω2). Ce cas defigure est represente a la figure 5.7.
ω
ℜe[G(jω)]
ω1 ω2
Fig. 5.7. La partie reelle est negative pour dans la plage frequentielle ]ω1;ω2[.
Il se pourrait, des lors, que de l’energie soit injectee dans cette bandede frequence. Pire encore, nous pourrions arbitrairement augmenter cetteenergie en jouant explicitement sur la frequence du signal d’excitation. Ceciest represente a la figure 5.8.

118 5 Passivite
ω
|U(jω) |2
ω1 ω2
Fig. 5.8. L’energie dans la plage de frequence ]ω1;ω2[ est augmentee de manierearbitraire
En ecrivant ceci de maniere calculatoire,
∫ ∞
0
u(τ)y(τ)dτ =1
π
∫ ω1
0
ℜe[G(jω)] | U(jω) |2 dω (≥ 0)
+1
π
∫ ω2
ω1
ℜe[G(jω)] |U(jω) |2 dω (< 0) ⇓
+1
π
∫ ∞
ω2
ℜe[G(jω)] |U(jω) |2 dω (≥ 0).
De part le fait que la partie reelle est negative seulement dans la plage]ω1;ω2[, seul le terme du centre peut etre rendu negatif. Toutefois, ce termepeut etre rendu arbitrairement negatif et donc l’integrale peut etre rendueaussi negative que desiree.
En consequence, si ∃ω1, ∃ω2 → ℜeG(jω) < 0 ∀ω ∈ (ω1;ω2) on a, ∀α >−∞, ∃u(t) tel que,
∫ ∞
0
u(τ)y(τ)dτ < α.
En utilisant la contraposee, (A ⇒ B ≡ A ⇐ B), ℜeG(jω) ≥ 0, ∀ω > 0⇐∃α > −∞,
∫∞0 u(τ)T y(τ)dτ > α, (∀u(t)), et nous arrivons a la conclusion
de la proposition, en utilisant la definition integrale de la passivite ??
5.8 Systeme reel positif
Le theoreme precedent conduit naturellement a definir une classe desystemes lineaires en fonction de la partie relle de leur reponse harmonique.

5.8 Systeme reel positif 119
Definition 5.9. G(s) est reelle positive (RP) si,
ℜe [G(s)] ≥ 0, ∀ℜe[s] ≥ 0;
et strictement reelle positive (SRP) si, ∃ǫ > 0 tel que G(s− ǫ) est (RP).
Theoreme 5.10. Une fonction de transfert G(s) est (SRP)
⇔
1. G(s) est strictement stable (sans pole sur l’axe imaginaire)
2. ∀ω ≥ 0 ⇒ ℜe [G(jω)] > 0
Une demonstration de ce theoreme peut etre trouvee dans [Kha02].
5.8.1 Degre relatif et minimum de phase
Quelques criteres simples sont a disposition pour detecter les systemespositifs reels, ou plus exactement pour rejeter ceux qui ne le sont pas. Lafonction de transfert peut etre mise sous forme de fraction rationnelle depolynomes factorises de telle sorte que les zeros et les poles apparaissent demaniere explicite.
G(s) =
∏mi=0(s− zi)
∏ni=0(s− pi)
C’est en fonction de la caracteristique de ces poles et zeros qu’il est pos-sible d’etablir des criteres de necessite pour que la reponse harmonique ait lapropriete de la definition 5.9. Deux notions jouent un role fondamental danscette analyse. Il s’agit du concept de degre relatif et de minimum de phase. Lepremier est defini comme la difference entre le nombre de poles et le nombrede zeros.
Definition 5.11. (degre relatif) Le degre relatif note dor est defini comme ladifference
dor = n−m
ou n est le nombre de poles de la fonction de transfert et m, le nombre dezeros.
Etant donne qu’un systeme physique est causal, cette difference sera tou-jours consideree positive ou nulle.
Caracteristique 5.12. Pour un systeme physique, le degre relatif est toujourspositif ou nul, i.e. dor. ≥ 0.

120 5 Passivite
La deuxieme notion est celle de minimum de phase. Elle joue egalementun role majeur lors de la commande de systeme par linearisation entree-sortieet sera abordee au chapitre 7. Cette propriete est liee a la position des zerosdans le plan complexe.
Definition 5.13. (minimum de phase) Un systeme lineaire est dit a mini-mum de phase si tous ces zeros ont une partie reelle strictement negative. i.e.Re(zi) < 0, i = 1, . . . ,m.
Remarque 5.14. La definition precedente de la notion de systeme a minimumde phase est valable pour les systemes lineaires uniquement. Une definitionplus generale, ne faisant pas appel a la notion de fonction de transfert, existeet elle sera donnee au chapitre 7.
Les quatre exemples qui suivent permettent, d’une part de se familiariseravec ces notions et, d’autre part, d’illustrer les conditions necessaires pour lapresence d’un systeme reel positif. Ces quatres exemples presentent chacunune fonction de transfert type. Les reponses harmoniques sont representeesa la fois dans le diagramme de Nyquist et dans le diagramme de Bode. Lediagramme de Bode comporte un graphique pour l’amplitude et un pour laphase.
Exemple 5.15. Le premier exemple correspond a la fonction de transfert,
G(s) =1
(s+ 1)(s+ 1),
dont la reponse harmonique est representee a la figure 5.9.
En examinant les notions introduites a la section precedente, on constateque le degre relatif vaut deux et ne comporte pas de zero. Il est donc a phaseminimale. Le systeme est egalement stable. Cependant la partie reelle de lareponse harmonique comporte toujours une partie relle negative, comme lemontre le diagramme de Nyquist et la phase du diagramme de Bode.
Exemple 5.16. Le deuxieme exemple,
G(s) =s+ 2
(s+ 1)(s− 1),
est de degre relatif 1, mais il comporte cette fois un zero dont la partie reelleest negative. Un coup d’oeil sur les poles montre que le systeme est cependantinstable, puisqu’un de ceux-ci se trouve en +1.
La partie reelle de la reponse harmonique devient negative a partir d’unecertaine pulsation comme l’illustre la figure 5.10. Ceci est logique etant donneque l’instabilite necessite d’encercler le point −1. La reponse harmonique doitdonc necessairement entrer dans le deuxieme ou troisieme quadrant.

5.8 Systeme reel positif 121
Frequency (rad/sec)
Pha
se (
deg)
; Mag
nitu
de (
dB)
Bode de (s+2)/[(s+1)(s-1)] :-(
-20
-15
-10
-5
0
5
10-1
100
101
-160
-140
-120
-100
Real AxisIm
agin
ary
Axi
s
Nyquist Diagrams
-2 -1.5 -1 -0.5
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
:-(
Fig. 5.9. Toute la reponse harmonique possede une partie reelle negative. Le degrerelatif est dor = 2.
Frequency (rad/sec)
Pha
se (
deg)
; Mag
nitu
de (
dB)
Bode de 1/[(s+1)(s+1)] :-(
-40
-30
-20
-10
0
10-1
100
101
-150
-100
-50
Real Axis
Imag
inar
y A
xis
Nyquist Diagrams
-1 -0.5 0 0.5 1
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
:-(
Fig. 5.10. Une partie de la reponse harmonique possede une partie reelle negative.Le degre relatif est dor = 1, mais le systeme est instable.
Exemple 5.17. Le troisieme exemple,
G(s) =s− 2
(s+ 1)(s+ 1),
est stable et de degre relatif 1. Mais il comporte un zero situe a 2, c’est-a-diredans le demi plan complexe correspondant a une partie reelle positive. Lesysteme n’est donc pas a phase minimale.

122 5 Passivite
Frequency (rad/sec)
Pha
se (
deg)
; Mag
nitu
de (
dB)
Bode de (s-2)/[(s+1)(s+1)]:-(
-20
-15
-10
-5
0
5
10-1
100
101
-50
0
50
100
150
Real AxisIm
agin
ary
Axi
s
Nyquist Diagrams
-2 -1 0
-1.5
-1
-0.5
0
0.5
1
1.5
:-(
Fig. 5.11. Une partie de la reponse harmonique possede une partie reelle negative.Le degre relatif est dor = 1. Le systeme est stable, mais il n’est pas a phase minimale.
La reponse harmonique est representee a la figure 5.11 et demontre, commedans le cas de l’exemple precedent, que le systeme n’est pas reel positif.
Exemple 5.18. Le dernier exemple
G(s) =s+ 2
(s+ 1)(s+ 1),
est stable, de degre relatif 1. La fonction de transfert comporte un zero dans ledemi plan complexe gauche et donc represente un systeme a phase minimale.De plus, les deux poles ont une partie reelle strictement negative correspon-dant a systeme est stable.
La reponse harmonique est representee a la figure 5.12 et est a partie reellepositive sur tout l’ensemble des frequence. Le systeme est donc positif reel.
5.8.2 Lien entre Lyapunov et systeme RP
Les quatre exemples precedents suggere que les criteres suivants sontnecessaires pour que le systeme soit reel positif.
Caracteristique 5.19. Si la fonction de transfert est positive reelle, c.-a-d.
ℜe [G(jω)] ≥ 0, ∀ω,
alors
1. le degres relatif est nulle ou egal a 1 ;

5.8 Systeme reel positif 123
Frequency (rad/sec)
Pha
se (
deg)
; Mag
nitu
de (
dB)
Bode de (s+2)/[(s+1)(s+1)] :-)
-20
-15
-10
-5
0
5
10-1
100
101
-80
-60
-40
-20
Real AxisIm
agin
ary
Axi
s
Nyquist Diagrams
-1 0 1 2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
:-)
Fig. 5.12. La reponse harmonique est a partie reelle positive. Le degre relatif estdor = 1. Le systeme est stable. Il est egalement a phase minimale.
2. il n’y a pas de zero a partie reelle positive (G(s) est a phase minimale) ;
3. le systeme est stable ;
Il est alors interessant de s’interroger sur la structure de la representationd’etat d’un systeme lineaire passif. Comme le systeme est necessairementstable, l’equation de Lyapunov pour le systeme lineaire ATP + PA = −Qadmet toujours une solution P > 0 pour tout choix de matrice Q > 0. La pas-sivite est alors imposee par la relation entre l’entree u et la sortie y en relationavec la solution P obtenue lors de la resolution de l’equation de Lyapunov.Une difference essentielle reside dans le fait quee choix de Q ne peut plus sefaire completement arbitrairement.
Remarque 5.20. Le theoreme et la preuve qui vont etre presentes ci-apres vontetre simplifie quelque peu pour ne considerer que les systemes lineaires qui,dans la representation d’etat, ne contiennent pas d’influence instantanee del’entree sur la sortie (c.-a-d. D = 0 pour l’equation de sortie y = Cx+Du).
Lemme 5.21. (Kalman-Yakubovich-Popov) Soit G(s) = C(sI − A)−1B unematrice de transfert m×m avec m ∈ R correspondant a un systeme qui est ala fois commandable,
rang(
B AB . . . An−1B)
= n.
et observable,rang
(
CT ATCT . . . (AT )n−1CT)
= n.

124 5 Passivite
Sous ces hypotheses, la fonction de transfert G(s) est strictement reelle posi-tive si, et seulement si, il existe deux matrices symetriques definies positivesP et Q telles que
ATP + PA = −Qet
PB = CT .
La demonstration de ce lemme est assez compliquee (cf. par exemple[Kha02] et [Vid93] ainsi que les references ci trouvant). Toutefois, nous don-nons quelques indications sur la demonstration.
Preuve. (suffisance : ⇐) Par hypothese il existe une matrice P symetriquedefinie positive (P = PT > 0) satisfaisant ATP + PA = −Q pour un certainQ > 0 (egalement symetrique).
Etant donne que cette equation de Lyapunov est respectee, l’origine dex = Ax est asymptotiquement stable. Par consequent, A n’a pas de valeurpropre a partie reelle strictement positive.
Posons Φ(s) = (sI −A)−1 de telle sorte que
G(s) +GT (−s) = CΦ(s)B +BTΦ(−s)CT .
En utilisant le fait que PB = CT (par hypothese),
G(s) +GT (−s) = BTPΦ(s)B +BTΦT (−s)PB= BTΦ(−s)T
[
(ΦT (−s))−1P + P (Φ(s))−1]
Φ(s)B
= BTΦ(−s)T[
((−sI −A)TP + P (sI −A)]
Φ(s)B
= BTΦT (−s)(
−ATP − PA))
Φ(s)B
= BTΦT (−s)QΦ(s)B,
ou pour la derniere egalite, la propriete ATP + PA = −Q a ete utilisee. Onconclut ainsi que G(s + GT (−s) ≥ 0 pour autant que ℜ(s) ≥ 0. Le systemeest donc bien positif reel.
(necessite : ⇒) Comme la matrice de fonctions de transfert G(s) estconnue, il est possible de la factoriser sous la forme
G(s) +GT (−s) = T (s)T T (−s)
par l’intermediaire du lemme suivant :
Lemme 5.22. Si une matrice V (.) est rationnelle propre de dimension m×mde telle sorte que V (s) = V T (−s) et V (jω) > 0, ∀ω, alors il existe une matricestable rationnelle T (.) de dimension m×m telle que V (s) = T T (s)T (s), avecen plus rang T (jω) = m, ∀ω.

5.8 Systeme reel positif 125
(Une preuve de ce lemme se trouve dans Anderson, B. D. O. and Moore, J.B. Optimal Filtering, Prentice-Hall, 1979 ; une illustration dans le cas mono-variable est donnee a la remarque 5.23, apres la demonstration.)
Comme une realisation de G(s) est supposee, par hypothese, commandableet observable, ces deux proprietes sont egalement vraies pour T (s), de tellesorte que la matrice T (s) admet une realisation minimale x = Ax + Bu,y = Cu avec T (s) = C(sI − A)−1B.
Maintenant, en posant Φ(s) = (sI − A)−1,
T T (−s)T (s) = −BT ΦT (−s)CT CΦ(s)B. (5.1)
Comme la realisation est observable, il existe une matrice symetrique definiepositive R > 0 telle que
AT R+ RA = −CT C.
De plus,−CT C = AT R+ RA = (sI + AT )R− R(sI − A). (5.2)
En substituant cette expression dans (5.1), on obtient en utilisant Φ(s) =(sI − A)−1 :
T T (−s)T (s)
= −BT ΦT (−s)[
(sI + AT )R− R(sI − A)]
Φ(s)B
= −BT ((−sI − A)−1)T[
−(−sI − A)T R − R(sI − A)]
(sI − A)−1B
=[
BT R+ BT ((−sI − A)−1)T R(sI − A)]
(sI − A)−1B
= BT R(sI − A)−1B + BT ((−sI − A)−1)T RB
= BT RΦ(s)B + BT ΦT (−s)RB. (5.3)
D’un autre cote, en considerant une realisation de G(s) (au lieu de celle deT (s)) donnee par x = Ax+Bu, y = Cx avec G(s) = C(sI−A)−1B, le produitT T (−s)T (s) s’ecrit egalement sous la forme
T T (−s)T (s) = G(s) +GT (s) = C(sI −A)−1B +BT (−sI −AT )−1CT(5.4)
Comme toutes les valeurs propres des realisations de G(s) et T (s) ont unepartie reelle negative (les poles sont tous a partie reelle strictement plus petiteque zero de telle sorte que les valeurs propres de A et A le sont egalement), ilest possible d’identifier terme a terme les expressions (5.3) et (5.4). Le termede gauche correspond a un systeme completement stable, et celui de droite aun systeme ”symetrique” completement instable. Les stables et les instablesdoivent donc etre egaux ; on ne peut pas croiser les valeurs propres. On obtientpar consequent
BT R(sI − A)−1B = C(sI −A)−1B. (5.5)

126 5 Passivite
Finalement, en se souvenant que si deux realisations minimales equivalentes(disons (A,B,C) et (A, B, C)) donnent la meme matrice de transfert, alors ilexiste une matrice de changement de coordonnee M telle que A = M−1AM ,B = M−1B et C = CM . L’expression (5.5) signifie qu’il existe une cer-taine matrice M telle que A = M−1AM , C = BT RM et B = M−1B. Enconsequence, PB = PM−1B = MT RT B de telle sorte qu’avec
P = MT RTM
l’equationPB = CT
est respectee. En ce qui concerne la derniere propriete, a savoir etablirATP + PA = −Q avec Q une matrice definie positive, on considere unepetite perturbation de la fonction de transfert G(s). En fait on utilise non pasG(s) directement mais G(s− µ) avec µ variant entre 0 et un petit parametreδ > 0. Comme δ est choisi petit, G(s − µ) demeure strictement reel positif.Ceci revient a considerer
Aǫ = A+ǫ
2I
pour un petit parametre ǫ > 0 qui continue a satisfaire toutes les hypotheses.En utilisant Aǫ au lieu de A dans le raisonnement ci-dessus, et en adaptantles quantites M , R, A en tenant compte du changement de A vers Aǫ, nousavons
ATǫ P + PAǫ = ATǫ MTǫ R
Tǫ Mǫ +MT
ǫ RTǫ MǫAǫ
= (M−1ǫ AǫMǫ)
TMTǫ R
Tǫ Mǫ +MT
ǫ RTǫ Mǫ(M
−1ǫ AǫMǫ)
= MTǫ (ATǫ Rǫ + RǫAǫ)Mǫ
= −MTǫ C
Tǫ CǫMǫ
Finalement, en revenant vers A,
(A+ǫ
2I)TP + P (A+
ǫ
2I) = −MT
ǫ CTǫ CǫMǫ
ATP + PA = −MTǫ C
Tǫ CǫMǫ − ǫP = −Q,
et comme Q est visiblement definie positive, le resultat est demontre.
Remarque 5.23. Pour illustrer la factorisation polynomiale utilisee dans la par-tie de la suffisance, prenons le cas monovariable G(s) = 1
s+a avec a > 0. Lafactorisation T (s) est obtenue en considerant
G(s) +GT (−s) =1
s+ a+
1
a− s=
√2a
s+ a
√2a
a− s= T (s)T T (−s).
Le lemme 5.22 indique que cette factorisation a egalement lieue en multiva-riable.

5.8 Systeme reel positif 127
Remarque 5.24. La preuve du lemme montre la necessite de la commandabiliteet l’observabilite du systeme lineaire (A,B,C). Ces hypotheses sont utiliseesa deux reprises. Premierement pour garantir l’existence des realisations mi-nimales de G(s) et T (s) permettant l’existence de la matrice de passage M ,mais egalement lors de l’identite AT R+ RA = −CT C ou l’observabilite de larealisation de T (s) est utilisee (decoulant de celle de la realisation de G(s)).Le theoreme 5.25 (presente ci-apres) montre que la positivite reelle impliquela passivite. Dans une certaine mesure, les hypotheses de commandabilite etd’observabilite sont alors clairement necessaires. En effet, si ce n’etait pas lecas, une combinaison d’etat non observable ne pourrait pas avoir d’impact surla sortie, ce qui permettrait en utilisant l’entree u(t) de rendre arbitrairementpetit l’integrale
∫∞−∞ uT (τ)y(τ)dτ en injectant de l’energie dans la direction
non observable, impliquant ainsi la non passivite selon la definition integrale.Ces elements seront abordes dans les exercices ? ?.
Theoreme 5.25. Si un systeme lineaire x = Ax + Bu, y = Cx admet deuxmatrices symetriques definies positives P et Q qui satisfont les deux equations
ATP + PA = −QPB = CT
alors le systeme est passif avec comme fonction de stockage interne
V =1
2xTPx
et comme terme de dissipation
g =1
2xTQx.
Preuve. Comme mentionne plus haut, la matrice A est stable, et l’equationde Lyapunov ATP + PA = −Q admet une solution P > 0 quel que soit lechoix de la matrice Q > 0. Posons V (x) = 1
2xTPx et calculons sa derivee
V (x) =1
2
(
xTPx+ xTP x)
=1
2
[
(Ax+ bu)TPx+ xTP (Ax+ bu)]
=1
2xT (ATP + PA)x + ubTPx
= −1
2xTQx+ ubTPx.
En consequence, lorsque
y = bTPx = cTx,

128 5 Passivite
on obtient
V = −1
2xTQx+ uy
= uy − g,
de telle sorte que le systeme respecte bien la definition de passivite avec
V =1
2xTPx et g =
1
2xTQx.
Remarque 5.26. Plusieurs P sont necessairement obtenus par resolution de lafonction de Lyapunov ATP+PA = −Q. Seule une sera telle que Pb = c. D’unautre cote, en considerant uniquement l’equation Pb = c, plusieurs possibilitesexistent, mais elles conduisent a de mauvais choix, etant donne qu’elles nesatisfont pas necessairement ATP + PA = −Q. Par exemple, la symetrie deP n’a aucune raison d’etre satisfaite.
5.9 Stabilite absolue
La stabilite traitee dans cette section apparaıt lorsqu’un systeme lineaireest boucle par une non-linearite statique. Cette classe de systeme a deja faitl’objet de l’etude par la methode du premier harmonique dans le chapitre 3.Trois differences essentielles vont apparaıtre entre les deux traitements.
1. La non-linearite appartient a un secteur.
2. La stabilite d’un point d’equilibre sera exclusivement traitee.
3. Les resultats ne seront pas approximatifs mais exacts.
Nous commencerons pas definir le type de non-linearite, puis nous donne-rons une definition de ce type de stabilite.
5.9.1 Non-linearite statique de secteur
Definition 5.27. Une non-linearite φ est une non-linearite de type secteur[k1; k2]
∀y 6= 0 ⇒ k1y ≤ φ(y) ≤ k2y
5.9.2 Definition de la stabilite absolue
Un systeme lineaire en representation d’etat est boucle par une non-linearite statique u = −φ(y), ou y est la sortie du systeme lineaire et u sonentree :

5.9 Stabilite absolue 129
y
k1y
k2yφ(y)
Fig. 5.13. Un secteur delimite la region dans laquelle la non-linearite statique peutse trouver.
x = Ax − bφ(y) (5.6)
y = cTx
La question de la stabilie que l’on va traiter s’enonce de la maniere sui-vante.
Definition 5.28. Un systeme lineaire x = Ax + bu avec y = cTx est ditstable de maniere absolue vis-a-vis de la non-linearite φ de secteur [k1; k2],si le systeme (5.6) est stable quel que soit la valeur de la fonction statiquecomprise dans le secteur [k1; k2].
-x = Ax+ bu
u y = cTx
φ
Fig. 5.14. Diagramme de blocs representant le systeme lineaire boucle par unenon-linearite statique.

130 5 Passivite
5.9.3 Conjecture de M. A. Aizerman
Le secteur definit un lieu de points a l’interieur duquel la caracterstiquestatique non lineaire doit se situer. Si le secteur se retrecit de telle sortequ’il se confonde avec une droite lorsque k1 → k2, la caracteristique statiquedevient un simple gain. Lorsque k1 6= k2, le secteur est suffisamment large detelle sorte que plusieurs pentes k differentes peuvent y etre inclues. Ainsi, laquestion est de savoir si ces divers gains, compris entre k1 et k2, assurent lastabilite du systeme en boucle fermee. Etant donne que dans ce cas, l’ensembleest lineaire, l’analyse s’en trouve alors facilitee. Par consequent, il se peut tresbien que, pour tout gain fixe compris entre k1 et k2, le systeme lineaire bouclesoit stable. Peut-on alors en deduire, apres remplacement des gains fixes parune caracteristique statique quelconque comprise dans ce secteur, la stabilitedu systeme boucle ? Force est de constater que ceci n’est pas le cas, bien quecette conjecture soit tres seduisante.
Hypothese 5.29. Si pour tout choix de gain k compris dans l’interval k ∈[k1; k2], la matrice
[
A− bcTk]
est Hurwitz, c.-a-d. que la partie reelle de cha-cune de ses valeurs propres est strictement negative, alors le systeme lineairex = Ax + bu, y = cTx boucle par une non-linearite secteur u = −φ(y) avecφ(y) appartenant au secteur [k1; k2] est stable.
Cette conjecture est fausse comme il le sera illustre dans les exercices.
Les restrictions sur le systeme lineaire doivent etre plus severes afin d’abou-tir a une conclusion satisfaisante. Ceci fait l’objet du critere du cercle et ducritere de Popov.
5.9.4 Critere du cercle
Bien que la conjecture d’Aizerman soit fausse, elle evoque une certaineverite, a condition d’en modifier quelque peu l’enonce. Il est necessaire dedefinir un critere de stabilite de Nyquist plus exigeant. Le critere du cercle estune approche.
L’idee est de representer, non plus un point unique en −1, mais un cercledont les parametres sont fonctions des deux gains delimitant le secteur. Enfonction du signe de ces gains, la reponse harmonique doit laisser le cercle aun certain endroit par rapport a lui.
Theoreme 5.30. Un systeme entree-sortie dont la reponse harmonique estdefinie par G(jω), boucle par une non-linearite statique de secteur [k1, k2],est stable au sens absolu lorsque la reponse harmonique et le cercle D(k1, k2)respectent certaines proprietes geometriques l’un par rapport a l’autre.
En designant par Card[λ|ℜe[λ] > 0] = ρ le nombre de valeurs propresa partie strictement positive associee a la fonction de transfert G(s), nouspouvons distinguer trois cas de figure :

5.9 Stabilite absolue 131
1. Si 0 < k1 < k2 et G(jω) ne rentre pas dans le disque D(k1, k2) et G(jω)encercle ρ fois dans le sens dans le sens trigonometrique positif, alors lesysteme est stable au sens absolu.
D(k1, k2)G(jω)
− 1k1
− 1k2
Fig. 5.15. Critere du cercle lorsque k1 > 0 et k2 > 0.
2. Si 0 = k1 < k2 G(s) et que tous les poles de G(s) ont une partie reellestrictement negative et que le reponse harmonique G(jω) se trouve a droitede la droite verticale define passant par − 1
k2alors le systeme est stable au
sens absolu.
G(jω)
− 1k1
Fig. 5.16. Critere du cercle lorsque k1 > 0 et k2 = 0.
3. Finalement, si k1 < 0 < k2 et que tous les poles de G(s) sont a partie reellestrictement negative et que G(jω) est entierement inscrit a l’interieur ducercle D(k1, k2), alors le systeme est stable au sens absolu.
Pour comprendre le critere du cercle, et ainsi en etablir sa demonstration, ilest important d’abord de comprendre le cas particulier du secteur φ ∈ [0,+∞].
On se situe dans le cas 2. ou le cercle degenere en une droite verticale. Lecritere exige simplement que G(s) soit positif reel. Il s’agit alors de demontrer

132 5 Passivite
G(jω)
− 1k2
− 1k1
Fig. 5.17. Critere du cercle lorsque k1 < 0 et k2 > 0.
que sous ces conditions, le systeme est localement asymptotiquement stableau sens de Lyapunov.
On commence par etablir une representation d’etat a partir de la fonctionde transfert
G(s) = C(sI −A)−1B.
Dans le cas k1 = 0 et k2 = +∞, le cercle degenere en l’axe imaginaire. Lecritere du cercle exige de laisser le cercle a gauche. Par consequent, ceci revienta admettre que G(s) est a partie reelle positive. On peut donc appliquer letheoreme de Kalman-Yakubovich-Popov garantissant l’existence d’une fonc-tion pouvant jouer le role d’une fonction de Lyapunov. Pour etre plus precis,sous la condition que la partie relle de la reponse harmonique est superieurea zero, il existe une certaine matrice definie positive P satisfaisant simul-tanement
ATP + PA = −QPB = CT .
Il est important de noter que le choix de cette matrice est liee aux proprietesentree-sortie donne par les matrices B et C.
Pour aboutir a la stabilite dans le schema boucle ci-dessus, on considerela relation u = −φ(u) et la fonction de Lyapunov associee a P , c.-a-d.
V =1
2xTPx,
dont la derivee temporelle

5.9 Stabilite absolue 133
-G(s)
u y = cTx
φ ∈ [0; +∞]
Fig. 5.18. Diagramme de blocs de la cascade entre un systeme lineaire et unenon-linearite de secteur compris entre 0 et ∞.
V =1
2xTP x+
1
2xTPx
=1
2xT (ATP + PA)x+ xTPBu
= −1
2xTQx+ xTCTu
= −1
2xTQx− yTφ(u)
montre que sous la condition φ ∈ [0; +∞] (de telle sorte que yTφ(y) ≥ 0) laderivee de la fontion de Lyapunov est strictement plus petite que zero
V < 0 x 6= 0.
En consequence, le theoreme de Lyapunov assure la stabilite en boucle fermeequel que soit la non-linearite statique compris dans le secteur delimite park1 = 0 et k2 = ∞.
Pour traiter le cas general, il suffit de construire des bouclages artificielsautour du schema, afin de transformer la non-linearite secteur [k1; k2] en unenon-linearite secteur [0; +∞].
Commencons par modifier la non-linearite φ de secteur [k1, k2] en unenouvelle non-linearite de secteur [0; k2 − k1]. Il suffit d’additionner en parallelea φ un gain negatif de −k1, c.-a-d. φ(u) − k1u. Maintenant, l’inverse de la non-linearite ainsi obtenue conduit a une nouvelle, mais de secteur [ 1
k2−k1 ; +∞].
Finalement, le redressement est opere par addition en parallele du gain − 1k2−k1
conduisant a une non-linearite de secteur [0; +∞].
Les etapes precedentes sont resumee en un calcul, ou l’on note [φ] pourl’operateur entree-sortie associe a la fonction φ(.) :
1
[φ] − k1− 1
k2 − k1

134 5 Passivite
En inversant cette expression, on obtient toujours une non-linearite secteur[0; +∞],
11
[φ]−k1 − 1k2−k1
=[φ] − k1
1 − 1k2−k1 ([φ] − k1)
,
mais qui se met sous la forme d’un bouclage represente a la figure 5.19
+
+ +-
φ
1k2−k1
k1
Fig. 5.19. Bouclages permettant de modifier une non-linearite de secteur [k1; k2]en une non-linearite de secteur [0; +∞].
En renversant le sens des bouclages et en les appliquants a la fonction detransfert G(s), tous les bouclages introduits se compensent parfaitement. Enfin de compte, nous n’avons rien modifie (figure 5.20).
Remarque 5.31. La cle consiste a introduire des bouclages sur la non-lineariteφ et des bouclages sur la partie lineaire G(s) dans le sens oppose, de telle sorteque la relation u = −y annule l’effet des bouclages. (Dans le bouclage initial,u est l’entree de la non-linearite φ et y la sortie du systeme lineaire G(s).) Lesbouclages ne sont donc qu’artificiels et ne modifient en rien le comportementglobal du schema initial. Toutefois, en redefinissant les elements φ et G(s)autour des bouclages nouvellement constitues, de nouveaux elements φ etG(s) font leur apparition. Ceci transforme G(s) en une nouvelle fonction detransfert G(s), entraınant de la sorte une nouvelle condition sur G(s).
Ainsi, en examinant la figure 5.20 et en isolant la non-linearite transformeepar les bouclages, conformement a la figure 5.19, un nouveau systeme lineaireG(s) est identifie
G(s) =G(s)
1 + k1G(s)+
1
k2 − k1=
1k2
+G(s)1k1
+G(s)
(
k2
k1
1
k2 − k1
)
. (5.7)
Demontrons le premier cas du critere du cercle ou k1 > 0 et k2 > 0.Comme, d’une part, k2 > k1 (propriete de la definition du secteur), le second

5.9 Stabilite absolue 135
+ +
++ +---
φ G(s)
1k2−k1
1k2−k1
k1k1
Fig. 5.20. Les bouclages introduits se compensent parfaitement conduisant leschema ci-dessus a etre identique au bouclage de G(s) par la non-linearite φ.
facteur du dernier membre de (5.7) est toujours positif, et, d’autre part, G(s)doit etre strictement positif reel, nous aboutissons a la condition
Re
[
1k2
+G(jω)1k1
+G(jω)
]
> 0 ∀ω ∈ R. (5.8)
5.9.5 Critere de Popov
Le critere de Popov est, tout comme le critere du cercle, une exploitation dela propriete de passivite lors de l’interconnexion d’un systeme lineaire et d’unenon-linearite de type secteur. Nous donnons le resultat sans demonstration.L’utilisation du critere revient a tracer une droite dans un plan convenableet de garantir que la reponse harmonique G(jω) demeure du bon cote dela droite. Le plan consiste a representer en abscissee la partie reelle de lareponse harmonique Re G(jω) et l’ordonnee la partie imaginaire multiplieepar la pulsation ωIm G(jω). La droite passe par le point − 1
k et possede unepente de 1
α . ǫ represente la marge avant de toucher la droite.
Theoreme 5.32. – ∀λ ℜe[λ(A)] > 0 et (A,B) commandable– Non-linearite φ de type secteur– ∃α > 0 tel que
∀ω ≥ 0, ℜ[(1 + jαω)G(jω)] + 1k ≥ ǫ
pour une certaine valeur ǫ > 0
⇒
0 est globalement asymptotiquement stable

136 5 Passivite
Exercices
5.1. Critere du cercle. Demontrer a partir de la formule (5.8), le criteredu cercle dans le cas 0 < k1 < k2. Determiner une formule analogue pour lesautres cas, et montrer que ces formules admettent l’interpretation correspon-dant a l’enonce du critere du cercle.
5.2. Necessite de l’observabilite. Supposons qu’il ne soit pas possible dediscriminer la sortie nulle de l’etat nul pour un systeme lineaire ayant unereponse harmonique dans la partie droite du plan complexe. En somme, enforcant la sortie du systeme a zero, il existe une trajectoire non nulle associeea une combinaison des etats qui n’est pas identiquement nulle. Montrer quele systeme n’est pas passif dans ce cas.
5.3. Necessite de la commandabilite. Discuter du cas ou le systeme acommander (en representation d’etat) n’est pas commandable mais possedeune sortie pour laquelle la fonction de transfert associee donne lieu a unereponse harmonique qui se situe dans le plan droit du plan complexe. Est-ceque le systeme obeit a la definition de la passivite ?
5.4. Critere de Popov. Demontrer le critere de Popov.
5.5. La conjecture d’Aizerman est fausse1. Considerer la fonction detransfert
G(s) =s(s+ a)
[(s+ b)2 + 0.92][(s+ b)2 + 1.12]
bouclee par une contre reaction negative sur une zone morte d’equation (u =φ(y) avec u l’entree de G et y sa sortie).
φ(y) =
y − 1 y > 10 −1 ≤ y ≤ 1
y + 1 y < −1
(i) Obtenir une realisation d’etat de la fonction de transfertG(s), et simulerl’ensemble en boucle fermee. Les valeurs nominales des parametres sont k =10, a = 0, et b = 0.01.
(ii) Verifier theoriquement que pour un gain constant compris entre 0 et1 le systeme est stable.
(iii) Remplacer la non-linearite par un gain 0 et 1 et verifier par simulationle resultat.
(iv) En utilisant la non-linearite en contre-reaction comme decrit plus hautet en faisant varier les parametres suivant le tableau
1 Selon l’article de R. E. Fitts Two Counterexamples to Aizerman’s Conjecture,
IEEE Trans. on Automatic Control, 1966, pp. 553-556.

5.9 Stabilite absolue 137
k a b
0.1 ≤ k ≤ 1000 0 0.0110 0 ≤ a ≤ 0.02 0.0110 0 0.01 ≤ b ≤ 0.75
montrer par simulation que le systeme dynamique n’est pas stable et qu’ily a presence de cycles limites.


Partie II
Synthese


141
La partie precedente a ete consacree a l’analyse d’un systeme dynamiquenon lineaire. L’existence d’un bouclage y etait admis sans savoir precisementcomment il est obtenu. Dans ce chapitre et les suivants, la construction dela loi de commande sera examinee. L’objectif est d’ameliorer le systeme acommander en performance (p. ex. suivi precis et rapide d’une trajectoire) ouen robustesse (p. ex. rejet de perturbations). Pour commencer, nous disingue-rons principalement les problemes de regulation et de poursuite. La regulationconsiste a ramener le systeme vers un point d’equilibre. La poursuite consistea suivre une trajectoire predefinie avec une erreure asymptotique nulle. En-suite, l’approche de linearisation sera envisagee. Il s’agira de transformer lesysteme initial en un ensemble de chaınes d’integrateurs independants. Ainsi,la solution complete sera obtenue lorsque ces chaınes d’integrateurs serontstabilisees.
Nous avons donc un systeme donne comme un ensemble d’equationsdifferentielles ordinaires du premier ordre
x = f(x).
Lorsqu’on a a disposition, dans cet ensemble d’equations differentiellesordinaires, une variable xl que l’on peut instantanement modifier, on peut ladesigner comme etant une entree u.
Bien entendu, nous devons faire attention a ce que la modification decette variable puisse etre physiquement realisee dans la realite. En effet, lesequations differentielles ne sont qu’un modele, et cette modification de l’entreepotentielle est sujette parfois a des hypotheses supplementaires qui n’ont pasete prises en comptes pour elaborer le modele. Si tel s’avere etre le cas, ilfaut alors completer les equations differentielles par les conditions negligeescorrespondantes et considerer l’entree comme un etat. (Il y aura donc desequations differentielles supplementaires.)
Une fois les entrees designeees, nous pouvons egalement choisir des sortiesparticulieres du systeme. Ce sont des fonctions de l’etat correspondant le plussouvent a une grandeur particuliere d’interet et mesurable dans la realite.Mais il peut egalement s’agir d’une sortie ”artificielle”, au sens ou l’objet dela realite ne possede pas necessairement les capteurs necessaires pour mesurercette grandeur. Nous verrons qu’il est possible de constituer de telles sorties etqu’elles sont tres pratiques pour elaborer un mouvement d’ensemble de l’etatpar simple assignation de valeurs successives particulieres a cette sortie. Bienqu’elle puisse ne pas etre mesuree, il est possible au moyen d’une simple com-mande a priori d’assigner un tel historique a cette sortie et donc a l’ensemblede l’etat.
En consequence, une fois les grandeurs d’entree et de sortie designees, lesequations difflerentielles x = f(x) s’ecrivent avec les entrees ui, i = 1, . . . ,met et les sorties y1, . . . yp comme :

142
x = f(x, u1, . . . , um)
y1 = h1(x)
......
yp = hp(x)
Nous allons montrer dans le cours des chapitres de cette seconde partiecomment nous pouvons fabriquer un nouvel ensemble d’equations differentiellesordinaires du premier ordre, non-lineaires qui constituera la loi de commande :
z = f(z, v1, . . . , vp)
w1 = h1(x)
......
wm = hm(x).
Il est important de remarque que cet ensemble est purement artificiel et necorrespond pas necessairement a une representation d’un phenomene obser-vable existant (contrairement au modele de depart). Il pourra etre realiser dansun calculateur, ou par des module de synthese analogiques ou biologiques, parconstruction de mecanismes particulier, etc.
Afin que le controleur interagisse avec le systeme de depart, les entrees dusysteme de depart seront assignees aux sorties du controleurs et reciproquement :
u1 = w1
......
um = wm
v1 = y1...
...
vp = yp,
ou de maniere plus condensee :
v = h(x)
u = h(z).
Nous avons comme cas particulier, i) l’assignation d’une trajectoire tempo-relle p(t) a l’entree u (puisque pouvant instantanement etre modifiee). Cetteentree est alors definie de maniere univoque a chaque instant du temps
u = p(t).
Nous avons egalment le cas particulier ii) ou le controleur est depourvu dedynamique de telle sorte que v = x :

143
u = h(x).
Dans le premier cas i) on parlera de commande en boucle ouverte, ou decommande a priori, en fonction du contexte.
Dans le second cas ii), il s’agit d’une loi de commande statique en bouclefermee (ou en contre-reaction).
Dans le cas general la commande sera qualifiee de dynamique.
Dans les deux cas, les solutions du systeme d’equations differentielles ordi-naires non lineaires est modifie entre le cas ou les entrees stont forcees a zeroet le cas ou elles suivent une de ces lois de commande.
Toute la question reside alors dans la maniere d’elaborer cette commandeafin d’atteindre un objectif, un but determine.
Pour l’instant, nous n’avons pas mentionne ce que nous entendons parbut ou objectif. Contrairement a l’analyse, ou le systeme est en quelque sortefige, la possibilite de definir plusieurs objectifs potentiels, chacun necessitantune commande differente, conduit a l’existence d’une multitude de systemes.Cette non fixite du systeme resultant rend la tache paradoxalement difficileet facile a la fois : difficile, car l’objectif est souvent tres contraignant a causede la complexite du systeme de depart ; facile, car la presence de plusieurschoix de commande augmente necessairement les possibilites de synthese. Ilest important de souligner que la solution en fonction de l’objectif choisit n’estpas necessairement unique.
L’objectif est lie a ce que desire l’utilisateur de la representation de larealite qu’il a obtenu en definissant son systeme de depart.
Ceci signifie que meme lorsque le probleme mathematique est resolut, etque la grandeur de commande est assignee sur le systeme reel selon la loiobtenue, il n’est pas garantit que l’evolution du vrai systeme mesure et observesur la realite soit conforme avec les desirs du concepteur. Les raisons sontnombreuses et sont toutes essentiellement liees a la validite et l’applicabilitedes equations differentielles utilisees pour representer le phenomene.
Ce que l’on peut dire neanmoins, c’est que la commande elaboree doiten quelque sorte ameliorer le comportement du systeme mathematique, quecela soit la qualite de l’evolution temporelle des solutions, la structure dessolutions, ou les caracteristiques du systeme transforme, comme par exemple,la nature et le nombre de points d’equilibres nouvellement formes ou detruits,la creation de cycle limite avec des parametres bien definis.
Dans le cas ou le modele initial correspond fidelement a l’observation dela realite il y alors de grandes chances de succes, au sens ou la modification,en suivant la loi de commande etablie, de la grandeur reelle correspondanta l’entree, conduise a l’observation du comportement desire sur la realite.Toutefois, il est important d’insister sur une reserve, une prudence qu’il fautobserver.

144
En effet le modele n’est qu’une representation de la realite sous les condi-tions d’experimentation effectuees pour l’elaborer. Lorsque le controleur estactive, il se peut qu’il pousse le systeme reel au dela des conditions dans les-quelles le modele initial a ete etablit, conduisant a une catastrophe potentielle.Il est donc tres important d’etre prudent lors de la phase d’implantation. Ilfaut bien se rendre compte qu’il n’y a absolument aucun moyen d’eviter cettedifficulte.
Dans le cours des chapitres L’objectif sera un de ceux donnes ci-apres :
1. forcer les trajectoires des etats a converger de maniere stable vers un pointd’equilibre bien defini (c.-a-d. en presence de perturbations potentielles) ;
2. forcer une sortie preetablie (fonction particuliere des etats) a suivre unetrajectoire choisie a l’avance pour un certain choix de conditions initialeset en absence de perturbation ;
3. meme objectif que le precedent, mais en exigeant que ceci se produisequelque soit les conditions intiales et en presence de perturbation ;
4. amener le systeme d’un point de depart (etat initial) vers un point d’ar-rivee final (etat terminal), en l’absence de perturbation, et sans conditionsur l’evolution de l’etat durant la transition ;
5. amener le systeme d’un point de depart (etat initial) vers un point d’ar-rivee final (etat terminal), en presence de perturbations, et avec des condi-tions sur l’evolution de l’etat durant la transition.

6
Elements de Geometrie
6.1 Introduction
Contrairement aux precedents chapitres, il ne sera pas question de systemedynamique a proprement parle. Le point de vue sera d’abandonner momen-tanement la conception du temps en tant que variable particuliere (sauf men-tion explicite du contraire dans certains cas rares). L’idee est d’introduiredes outils de formulation des conditions d’integrabilite apparaissant a la foisdans le chapitre sur le probleme de la linearisation par bouclage et de celuiconcernant la construction de fonction de Lyapunov. Dans ces deux cas, ladifficulte essentielle est de remonter a partir d’un vecteur ligne correspondanta un certain gradient vers la fonction dont le gradient est issu. La constructionde la fonction n’est pas toujours possible et il est important d’avoir des outilspermettant de determiner la possibilite ou non de la construire.
Le cadre mathematique adequat est la geometrie differentielle. Cette dis-cipline etudie les surfaces (varietes) selon un point de vue infinitesimal. Lo-calement, une variete ressemble a un espace euclidien, au sens ou une cor-respondance entre un point de la variete et un point d’un espace euclidienexiste. La correspondance doit etre continue et differentiable. L’inverse de lacorrespondance doit egalement etre continue et differentiable.
Toutefois, l’ensemble complet (consistant en la reunion des ensembles loca-lement euclidien) ne possede plus la propriete euclidienne. Un exemple trivialest la surface d’une sphere. Il est en effet possible de representer (moyen-nant distortion) la surface de la sphere par une carte plane. Chaque pointde la sphere peut etre mis en correspondance avec un point de la carte. Lesmeridiens et les paralleles sont alors perpendiculaires sur la carte (espace eu-clidien) bien que ceux-ci se coupent sur la sphere (espace non euclidien). Deplus, il est impossible de representer de maniere continue l’ensemble de departpar une seule carte.

146 6 Elements de Geometrie
En effet, il faut decider quelles en seront les limites et on se heurte auprobleme suivant. Supposons une carte unique, de telle sorte qu’un point setrouvant a l’extremite droite d’une carte possede un voisinage dans la varietequi n’est plus un ensemble connexe sur cette carte. Par exemple, si l’on prendune carte traditionnelle du monde, un voisinage de la taille de deux meridiensde large de l’atole de Funafuti un peu au dessus du dixieme parallele tout adroite de la carte se retrouve egalement partiellement represente 40’ooo km agauche sur la carte (ceci en faisant confiance a l’echelle de la carte) ! Pour ga-rantir la continuite dans la lecture de la carte, il est necessaire d’avoir recoursa plusieurs cartes chacune pour une region particuliere d’interet. En geometriedifferentielle, tout comme en cartographie, un tel ensemble est appele un atlas.
Maintenant, si l’on considere la trajectoire d’un avion evoluant au dessusde la surface de la terre, on peut le representer par une trajectoire sur lasphere (l’altitude de l’avion n’est pas consideree). Il y correspond egalementune trajectoire plane sur la carte. Une notion cle de la geometrie differentielleest que les vitesses d’un objet le long d’une trajectoire d’une variete appar-tiennent toujours a un espace euclidien ! La courbure est en quelque sorteabsente lorsqu’on considere les espaces des vitesses en un point de la variete.Si l’on considere un instant specifique, l’orientation du vecteur de vitesse peuta priori prendre n’importe quelle orientation dans un certain plan dit plan tan-gent de la variete au point en question (on considere que l’on ne connait pas apriori la trajectoire avant l’instant et apres l’instant specifique lorsqu’on exa-mine le point en question). De plus, le vecteur vitesse peut egalement prendren’importe quel module (pour autant que l’ aerodynamique le permette). Ensomme, c’est reellement un vecteur appartenant a un espace euclidien propreaux vitesses. La difficulte est que cet espace euclidien change de point en pointle long de la trajectoire.
Nous verrons comment un systeme dynamique x = f(x, u) est representea l’aide des outils geometriques de la geometrie differentielle. Il sera alorsquestion de la variete dans laquelle l’etat evolue, un peu comme les positionsde l’avion sur la surface de la sphere, et des vecteurs de vitesses associes acette representation.
6.2 Variete, Cartes et Atlas
Une varieteM est un objet mathematique qui localement est representablepar un espace euclidien Rn. Une variete consiste en l’espace M avec uneensemble d’applications inversibles
φi : Rn → M
(6.1)

6.2 Variete, Cartes et Atlas 147
ou n represente la dimension de la variete. Ces cartes permettent derepresenter un point de la variete m ∈ M par un ensemble de coordonnees deRn.
Un atlas Φ consiste en la reunion de toutes les cartes
Φ = ∪iφi
Par exemple, dans le cas d’une sphere S2, il est possible de representerune courbe plane sur la surface de la sphere par une representation bidimen-sionnelle a l’aide d’une carte. En effet, une courbe plane definie par
x = sin t+ 2 cos t
y = cos t(1 − sin t) + 2 sin(2t)
pour t ∈ [0; 2π[, est representee a la figure 6.1.
-2 -1 1 2
-3
-2
-1
1
2
3
x
y
Fig. 6.1. Courbe parametree dans le plan.
Selon la maniere de representer la variete S2, il existe plusieurs representationspossibles de la carte φ1. Si l’on considere la sphere comme plongee dans R3,de telle sorte qu’un point est defini par trois coordonnees x, y et z soumisenta la contrainte
x2 + y2 + z2 = 1,
nous avons la representation (6.2) ou x et y sont les coordonnees sur la carte.
φ1 :
(
xy
)
→
cos(y6 ) cos(x3 )cos(y6 ) sin(x3 )
sin(y6 )
(6.2)
Cependant, il est egalement possible d’utiliser les angles de latitude φ etde longitude ψ pour representer un point de S2. Dans ce cas, la carte devient

148 6 Elements de Geometrie
φ1 :
(
xy
)
→(
φ = x/3θ = y/6
)
(6.3)
Dans les deux cas, la figure correspondant a celle 6.1 est donnee a la figure6.2.
Fig. 6.2. Representation dans la variete S2 de la courbe planaire de la figure 6.1,donnee localement dans une carte de l’atlas.
La variete ne peut en general pas etre decrite par carte unique, sauf lors-qu’elle peut se mettre en correspondance bijective avec un espace Rn. En effet,il est exige de pouvoir garantir l’existence d’un voisinage inclut dans la carte.Par exemple, la sphere necessite trois cartes, afin que chaque point possedeau moins une carte dans laquelle le point en question admette un voisinageinclut dans la carte. (Ceci evite ainsi le probleme de l’ıle de Funafuti decritdans l’introduction du present chapitre, ou plus precisement le probleme despoints qui sont representes par les bords verticaux de cette carte unique.)
Ceci entraıne egalement que plusieurs points de la variete admettent plu-sieurs representants, au plus un par carte. (Ce probleme est absent sur unecarte traditionnelle unique du monde, si ce n’est pour les poles qui sontrepresentes par les lignes superieure et inferieure delimitant respectivementle haut et le bas de la carte.)
Il faut, par consequent, que les cartes satisfassent des hypothese de compa-tibilite. Lorsqu’une carte particuliere est utilisee pour decrire un mouvementsur la variete, il doit etre egalement possible, sur les zones de recouvremententre les deux cartes, de le representer a l’aide de la carte qui n’est pas utilisee.
Ainsi, si φi et φj admettent chacune un representant du meme point m ∈M, disons respectivement xi et xj , alors il doit exister deux voisinages Vi et

6.2 Variete, Cartes et Atlas 149
Vj de xi et xj qui peuvent se mettre en correspondance a l’aide des carte φiet φj . Plus precisement,
φ−1j (φi(Vi)) = Vj
φ−1i (φj(Vj)) = Vi.
Un ensemble de carte φi constituant un atlas ayant ces proprietes de com-patibilite definit completement la variete M.
6.2.1 Diffeomorphisme
Les cartes correspondent a des applications entre un espace euclidien etla variete M. En composant une carte par l’inverse d’une autre, nous ob-tenons, sur les zones de recouvrement, un changement de coordonnee. Lescartes se composent de maniere univoque a condition que les changementsde coordonnees soient bien definis. Nous aurons egalement besoin de change-ments de coordonnees dans le chapitre consacre a la linearisation. Il serontmotives egalement par la volonte de compenser les courbures inherentes a larepresentation du systeme initial, un peu comme les cartes d’un atlas classiqueremedie quelque peu a la courbure intrinseque de la surface de la terre. Unetrajectoire rectiligne et plate sur la carte correspond a une trajectoire courbedans l’espace d’origine, dans l’espace de la variete M.
De maniere generale, la notion de changement de coordonnees est renduemathematiquement precise par la definition suivante :
Definition 6.1. (Diffeomorphisme) Une fonction Φ : Rn → Rn definie dansune region Ω est appelee diffeomorphisme si ∂Φ
∂x1
, . . . ∂Φ∂xnexistent et si Φ−1
existe. De plus Φ et Φ−1 doivent etre derivables.
Si Ω = Rn alors c’est un diffeomorphisme global.
Lemme 6.2. Soit Φ(x) une fonction reguliere de Ω ⊆ Rn → Rn. Si ∂Φ∂x est
non singuliere en x0 alors Φ(x) est un diffeomorphisme dans une sous regionde Ω contenant x0.
Exemple 6.3. Soit l’application de R2 dans R2 donnee par
Φ(x) =
(
2x1 + 5x1x22
3 sinx2
)
de telle sorte que sa matrice Jacobienne
∂Φ
∂x=
(
2 + 5x22 10x1x2
03 cosx2
)

150 6 Elements de Geometrie
devienne au point (0, 0)T
⇒ ∂Φ
∂x=
(
2 00 3
)
.
Comme cette matrice est plein rang au point considere, Φ respecte lesconditions de la definition de diffeomorphisme dans un voisinage du point(0, 0)T considere. On peut egalement demontrer que ce voisinage est contenudans l’ensemble Ω = (x1, x2), | x2 |< φ
2 .
6.3 Solution de l’equation differentielle
L’equation initiale x = f(x, u) admet l’interpretation geometrique sui-vante. L’etat x est assimile a un point d’une variete. Le plus souvent, cettevariete est consideree comme l’espace euclidien R
n.
Comme cas particulier de l’equation definissant la dynamique du systeme,considerons x = f(x). Une solution a cette equation differentielle ordinaire estune courbe parametree par le temps x(t) = Φ(xo, t) telle que Φ(x0, t0) = x0
et dφdt (x, t) = f(Φ(x0, t)) pour chaque point valeur du parametre t. Ainsi,
on peut attacher en chacun des points de la courbe parametree Φ(x0, t) unvecteur tangent a cette courbe f(x0, t).
Trouver la solution de l’equation differentielle ordinaire x = f(x) revientdonc a trouver une trajectoire dans la variete des lors que f(x) est donne.Cette trajectoire est une courbe parametree Φ(x0, t) associee a une certainecondition initiale x0. La donnee du systeme d’origine f(x) est interpreteegeometriquement comme un ensemble de vecteurs de vitesse definit sur lavariete. Il existe un vecteur f(x) et un seul pour chacun des points x dela variete. Trouver la solution a l’equation differentielle ordinaire consiste atrouver une courbe parametree Φ(x0, t) (c.-a-d. une trajectoire) passant parx0 a l’instant t0 et telle que la vitesse le long de la trajectoire dΦ
dt (Φ(x0, t)) soitegale au vecteur de vitesse en ce point f(Φ(xo, t)). Le parametre t permettantd’identifier le point sur la trajectoire.
6.4 Champ de vecteurs
Lors de l’etude des systemes dans le plan de phase, l’interpretation dela dynamique f(x) fait apparaıtre l’importance de representer l’element dedroite de pente correspondant au rapport entre f2(x1, x2) sur f1(x1, x2) en unmaximum de nombre de points x. Plus l’ensemble est grand et plus le nombred’elements de droite est egalement important, meilleure est l’interpretationdes trajectoires resultantes.
Dans le plan de phase il y a deux etats x1 et x2 et la dynamique s’ecrit

6.5 Espace dual 151
x1 = f1(x1, x2)
x2 = f2(x1, x2) (6.4)
Mathematiquement on peut considerer x1 et x2 comme les coordonneesd’un point, et f1(x1, x2) et f2(x1, x2) comme la composante d’un vecteurdefinit en ce point.
De maniere plus generale, et quel que soit la dimension de la variete (es-pace), f(x) represente un vecteur en un point donne de cette variete. Si main-tenant on considere la variete dans son entier, il est possible de se constituerune image visuelle d’une infinite de vecteurs, chaque vecteur f(x) etant at-tache au point x. Ce concept est un champ de vecteurs.
Definition 6.4. On appelle champ de vecteur une fonction
f : Rn → Rn
x1
x2
...xn
→
f1(x1, x2, . . . .xn)f2(x1, x2, . . . , xn)
...fn(x1, x2, . . . , xn)
Definition 6.5. Un champ de vecteur est dit regulier si ∂f1∂x1(x1, x2) et ∂f2∂x2
(x1, x2)existent en tout point defini par x1, x2,
6.5 Espace dual
En chaque point de la variete, un espace vectoriel existe contenant lesvecteurs tangents a la variete. Il est donc naturel de constituer l’espace dualde cet espace vectoriel. Nous rappelons brievement, dans cette section, lanotion d’espace dual a un espace vectoriel quelconque.
En algebre lineaire, il est possible d’associer un ensemble d’applicationsassociees a un espace vectoriel arbitraire V . Chaque application prend commeargument un vecteur et retourne un nombre scalaire.
Definition 6.6. (Espace vectoriel dual V ∗) L’ensemble des applications
Φ : V → R
et lineaire en l’argument x, a savoir quel que soit α, β ∈ R
Φ(αx1 + βx2) = αΦ(x1) + βΦ(x2),
constitue l’ensemble des vecteurs d’un espace vectoriel. Cet espace vectorielappele le dual de l’espace V , et il est note V ∗.

152 6 Elements de Geometrie
La propriete de linearite implique que ces applications constituent egalementun espace vectoriel que l’on designe par V ∗. En effet, en considerant une baseorthonormee e1, e2, . . ., en de l’espace vectoriel V , une application lineairef de V ∗ agit sur les vecteurs de bases pour fournir n nombres reels f(e1),f(e2), . . ., f(en). Il est alors possible de representer f , non plus comme uneapplication lineaire en tant que telle, mais sous la forme d’un vecteur ligne
(
f(e1) f(e2) . . . f(en))
. (6.5)
La valeur de l’application f pour un vecteur x de V est alors donnee parle produit scalaire entre le vecteur ligne (6.5) et le vecteur x. Par consequent,f est equivalent a un vecteur ligne, ce qui prouve que V ∗ est bien un espacevectoriel.
6.6 Produit tensoriel et forme multilineaire
L’espace des formes lineaires d’un seul argument (appartenant a un espacevectoriel V ) forme donc un espace vectoriel a part entiere, note V ∗. En effet, achaque forme lineaire, un vecteur ligne est associe, et reciproquement, commecela a ete vu a la section precedente. En resume,
Definition 6.7. Une forme lineaire est donnee par un application de V dansR :
ΦV → R,
qui est lineaire :∀α, β ∈ R, ∀v1, v2 ∈ V,
Φ(αv1 + βv2) = αΦ(v1) + βΦ(v2).
A partir de deux espaces vectoriels identiques V , un nouvel espace vec-toriel, note V ⊗ V , est forme, appele le produit vectoriel entre V et V . Unvecteur de V ⊗V est alors donne par la reunion de deux vecteurs de V , disonsv1 et v2 que l’on note v1 ⊗ v2. Il est facile de generaliser ceci au produit d’unnombre denombrable d’elements de V .
Definition 6.8. A partir d’un espace vectoriel V , un nouvel espace vectorielest constitue
n⊗
i=1
V = V ⊗ V ⊗ . . .⊗ V,
appele le produit tensoriel entre espaces vectoriels V , pour i = 1 a n.
Remarque 6.9. Lorsqu’un produit tensoriel contient une infinite de copies del’espace vectoriel V , il est d’usage de distinguer la somme directe

6.7 Produit scalaire et produit exterieur en dimension deux 153
∞∑
i=1
V = V ⊗ V ⊗ . . .⊗ V
du produit direct∞∏
i=1
V = V ⊗ V ⊗ . . .⊗ V.
Dans le premier,∑∞
i=1 V , seul un nombre fini de vecteurs est non nul. Dansle second,
∏∞i=1 V , un nombre denombrable (infini) d’elements non nuls est
admis. Etant donne que seul un nombre fini de V est necessaire dans ce quisuit, nous ne ferons pas cette distinction.
Definition 6.10. Une forme multilineaire est donnee comme une applicationd’un nombre fini de copies de V dans R :
Φ :
n⊗
i=1
V → R,
satisfaisant la linearite, c.-a-d. ∀α, β ∈ R, ∀vi ∈ V , i = 1, . . . , n, ∀w1, w2 ∈ V ,∀r ∈ 1, 2, . . . , n,
Φ(v1, . . . , vr−1, αw1 + βw2, vr+1, . . . , vn) =
αΦ(v1, . . . , vr−1, w1, vr+1, . . . , vn) + βΦ(v1, . . . , vr−1, w2, vr+1, . . . , vn).
6.7 Produit scalaire et produit exterieur en dimension
deux
Le produit exterieur est utilise en association avec l’espace dual. Il estfonde sur l’usage de determinants.
Considerons pour commencer un espace vectoriel de dimension deux. A
chaque couple de vecteurs v1 =(
v11 v12)T
, v2 =(
v21 v22)T
du plan, il estpossible d’associer un nombre reel correspondant a leur produit scalaire :
vT1 v2 = v11v21 + v12v22 = vT Iv.
L’ecriture ci-dessus met en evidence la matrice identite. Il est egalementpossible de definir un produit a partir d’une matrice definie positive Q > 0quelconque :
(v1, v2) = vT1 Qv2. (6.6)
On remarque alors, qu’a toute forme lineaire symetrique et definie posi-tive, il existe une certain matrice Q qui lui est associe. Ceci se generalise endimension plus grande que deux (section ??).

154 6 Elements de Geometrie
Au lieu de considerer des formes definies positives et symetriques (donnantnaissance a des produits scalaires) il est possible de considerer des formes anti-symetriques, c.-a-d. des formes dont le signe alterne lorsque les arguments sontpermutes. Elles donnent naissance a des produits exterieurs.
En dimension deux, le produit exterieur entre deux vecteurs v1 et v2 estdefini comme le determinant constitue des composantes des vecteurs :
v1 ∧ v2 =
∣
∣
∣
∣
v11 v21v12 v22
∣
∣
∣
∣
= v11v22 − v12v21 (6.7)
ou l’on reporte les composantes en vertical dans le determinant. Ce produitest bien anti-symetrique
v2 ∧ v1 = v12v21 − v11v22 = −v1 ∧ v2. (6.8)
6.7.1 forme bilineaire symetrique
Une forme bilineaire symetrique a deux series de variables u1, u2, . . ., unet v1, v2, . . ., vn s’ecrit
f(u, v) = f(u1, u2, . . . , un, v1, v2, . . . , vn) =∑
i
∑
j
pijuiuj ,
avec pij ∈ R des coefficients fixes. Pour que la forme bilineaire f(u, v) soitsymetrique, il faut que les coefficients aij soient tels que
f(u, v) = f(v, u)
et donc pij = pji. Elle peut donc s’exprimer a l’aide d’une matrice symetriqueP = (pij) :
f(u, v) = uTPv.
6.7.2 forme bilineaire antisymetrique (alternee)
La forme f(u, v) est antisymetrique lorsque
f(u, v) = −f(v, u).
Cette propriete entraıne que f(u, v) s’ecrit sous la forme
f(u, v) =∑
i
∑
j
aij(uivj − ujvi).
On constate alors que les termes sous le signe sommation sont des determinants :

6.7 Produit scalaire et produit exterieur en dimension deux 155
f(u, v) =∑
i
∑
j
aij
∣
∣
∣
∣
ui ujvi vj
∣
∣
∣
∣
=∑
i
∑
j
aijui ∧ uj . (6.9)
La derniere egalite est obtenue en ne reportant que les variables de lapremiere ligne du determinant (a savoir ui et uj) intercales du signe ∧ corres-pondant au produit exterieur. Nous verrons la justification de cette notationau prochain paragraphe.
6.7.3 Produit exterieur de deux formes lineaires
Definition 6.11. Lorsque deux formes lineaires sont donnees, disons f(u)et f(u), leur produit exterieur est definit comme la forme bilineaire anti-symetrique associee au determinant
f(u) ∧ f(u) =
∣
∣
∣
∣
f(u) f(u)f(v) f(v)
∣
∣
∣
∣
. (6.10)
En utilisant les formes explicites
f(u) = a1u1 + a2u2 + . . .+ anun (6.11)
f(u) = a1u1 + a2u2 + . . .+ anun (6.12)
le produit (6.10) s’ecrit a partir des determinants des variables comme
f(u) ∧ f(u) =∑
i
∑
j
aiaj
∣
∣
∣
∣
ui ujvi vj
∣
∣
∣
∣
=∑
i
∑
j
aiajui ∧ uj (6.13)
Remarque 6.12. En introduisant explicitement l’expression de f et f donneespar (6.11) et (6.12) , on obtient
(a1u1 + . . .+ anun) ∧ (a1u1 + . . .+ anun) =∑
i
∑
j
aiajui ∧ uj (6.14)
et l’on constate que ce resultat aurait pu etre obtenu directement en considerantle produit ∧ avec la propriete distributivite par rapport a l’addition et la pro-priete d’antisymetrie :
– a ∧ a = 0–
a ∧ b = −b ∧ a (6.15)
–a ∧ (b + c) = a ∧ b+ a ∧ c (6.16)
Il comporte egalement d’autre proprietes en relation avec la multiplicationpar une fonction Υ (.) de Rn → R.

156 6 Elements de Geometrie
Υ (x)(ω1 ∧ ω2) = ω1 ∧ (Υ (x)ω2) = (Υ (x)ω1) ∧ ω2 (6.17)
Ceci justifie egalement la notation f(u) ∧ f(u), ou seul u apparaıt, ainsique celle du paragraphe precedent (6.9).
6.8 Forme multilineaire alternee
En ajoutant des series de variables, nous aboutissons a une forme multi-lineaire alternee
f(u, v, . . . , w)
qui est telle qu’apres echange de deux series de variables, le signe change.En utilisant le produit ∧ nous pouvons constituer une forme multilineaire apartir d’un nombre fini de formes lineaires en suivant (6.14) et en utilisant lesproprietes de non-commutativite et distributivite du produit ∧.
Par induction, il est alors egalement possible de construire le produitexterieur de plusieurs formes exterieures de degre quelconque.
Nous donnons maintenant une construction algebrique des formes multi-lineaires alternees en utilisant la definition des formes multilineaires donneesa la section (6.6).
L’idee consiste a remarquer qu’une forme multilineaire Φ est alterneelorsque elle annule un element v1 ⊗ v2 ⊗ . . . ⊗ vn pour lequel deux vecteurs,disons vi et vj , i 6= j, sont identiques. Ceci est notamment le cas pour uneforme bilineaire alternee, car f(u, u) = −f(u, u) implique f(u, u) = 0.
Definition 6.13. L’ensemble des elements annulateurs a est
a = v1 ⊗ v2 ⊗ . . .⊗ vn | ∃i, j i 6= j vi = vj.
a constitue un module de l’espace vectoriel⊗n
i=1 V . C’est un sous en-semble de l’espace vectoriel qui est ferme pour l’addition vectorielle et qui estegalement ferme pour le produit de l’espace vectoriel.
Le produit exterieur de n copies de l’espace vectoriel V est alors donnepar le quotient
n∧
i=1
V =
(
n⊗
i=1
V
)
/a
ce qui a pour effet d’envoyer tous les elements de a de⊗n
i=1 V vers 0 dans∧ni=1 V . a joue en quelque sorte le role d’element absorbant.
Definition 6.14. Une forme multilineaire alternee Φ de⊗n
i=1 V dans R estune forme multilineaire de
∧ni=1 V dans R.

6.9 Cotangent et les 1-forme differentielles 157
6.9 Cotangent et les 1-forme differentielles
Les vecteurs tangents en un point donne x de la variete appartiennent a unespace vectoriel Tx. Cet espace est un cas particulier d’espace vectoriel V . Ilest alors naturel de construire son espace dual T ∗
x . Les vecteurs de cet espacedual sont des applications lineaires ayant comme argument un des vecteurstangent a la variete au point x et retournant un nombre reel.
Une telle application lineaire est appelee un covecteur tangent ou une 1-forme differentielle. Tout comme dans le cas de V , elle peut egalement serepresenter sous la forme d’un vecteur ligne en choisissant une base ortho-normee quelconque de Tx. L’espace vectoriel associe T ∗
x est appele espacevectoriel cotangent, ou plus simplement cotangent.
Exemple 6.15. Dans le chapitre sur le plan de phase, l’elimination de la va-riable temporelle s’est fait de deux manieres differentes. D’une part, le systemed’equations differentielles du premier ordre
x1 = f1(x1, x2) (6.18)
x2 = f2(x1, x2) (6.19)
a conduit a deux solutions x1(t) = Φ1(t) et x2(t) = Φ2(t) decrivant unecourbe Φ(x1, x2) apres elimination de la variable temporelle t. D’autre part,la differentielle dt a ete eliminee et l’expression resultante directement integree.Ces deux techniques sont maintenant reexaminees selon l’angle du champ devecteur f(x) de du covecteur associe.
Dans la premiere technique, lorsque le temps est elimine apres integrationdu systeme d’equation (6.18) et (6.19), une courbe trajectoire dans le plan dephase est obtenue. Pour le systeme masse-ressort nous avons obtenu un cercle
Φ(x1, x2) = x21 + x2
2 − x1(0)2 − x2(0)2.
Par consequent, l’integration des equations differentielles (6.18) et (6.19)
definies par un champ de vecteur f(x) =(
f1 f2)T
et elimination de la variableindependante t engendre une courbe solution.
Cette courbe solution est egalement obtenue en envisageant le dual duchamp de vecteur f(x). Le vecteur ligne
(
f2(x1, x2) −f1(x1, x2))
annule lechamp de vecteur f(x) :
(
f2(x1, x2) −f1(x1, x2))
(
f1(x1, x2)f2(x1, x2)
)
= 0. (6.20)
Le vecteur ligne represente une contrainte sur les accroissements dx1 etdx2 pour que le deplacement infinitesimal correspondant soit dans le sens dela solution de l’equation differentielle.

158 6 Elements de Geometrie
Le produit scalaire (6.20) permet donc d’associer a un vecteur ligne, uneforme lineaire dont l’argument est un vecteur du champ de vecteur apparte-nant a Tx. La ligne en question est un vecteur cotangent appartenant a T ∗
x
que l’on notef2(x1, x2)dx1 − f1(x1, x2)dx2. (6.21)
On obtient une expression differentielle qui peut etre directement integreeconduisant a la courbe solution. En effet, apres substitution de f1 = dx1
dt et
f2 = dx2
dt la somme des quantities (6.20) reste nulle et la differentielle dt esteliminee :
∫
f2(x1, x2)dx1 − f1(x1, x2)dx2 = 0
conduisant a la courbe solution apres integration.
Pour l’oscillateur masse ressort ou f1(x1, x2) = x2 et f2(x1, x2) = −x1,l’expression differentielle en question est −x1dx1 − x2dx2 qui conduit apresintegration a l’equation du cercle − 1
2x21 − 1
2x22 = C, ou C est une constante
d’integration specifiee par les conditions initiales C = − 12 (x1(0)2 + x2(0)2).
L’expression (6.21) est appelee une 1-forme differentielle.
Definition 6.16. Le dual de l’espace tangent en un point x, note T ∗x , est
appele le cotangent au point x. C’est un espace vectoriel dont les elementssont les applications lineaires de Tx dans R. Un vecteur correspondant estappele une 1-forme differentielle et note
a1(x)dx1 + a2(x)dx2 + . . .+ an(x)dxn,
ou ai(x), i = 1, . . . n, sont des fonctions des n variables x1, x2, . . ., xn.
6.10 Le gradient
L’exemple precedent montre que la correspondance entre un vecteur ligneet une application lineaire peut proceder dans le sens contraire. A partir d’unvecteur ligne quelconque, une application lineaire est definie par le produitscalaire entre cette ligne et le vecteur auquel l’application lineaire est ap-pliquee. Dans le cas d’une fonction scalaire de h(x1, x2, . . . , xn) : Rn → R lesderivees partielles par rapport a chacune des variables sont rassemblees dansun vecteur ligne definissant une forme lineaire par association de cette ligneavec l’application correspondante. Un tel vecteur ligne est appele le gradientet note
∇h =(
∂h∂x1
∂h∂x2
. . . ∂h∂xn
)
.
Par consequent, nous pouvons egalement interpreter le gradient comme unvecteur (covecteur) du cotangent T ∗
x en un point x.

6.11 Derivee de Lie 159
Remarque 6.17. Jusqu’a present, les notations rendent indispensable l’utilisa-tion des coordonnees x1, x2, . . ., xn. En somme, nous devons toujours utiliserune carte locale pour exprimer le gradient ou une autre forme differentielle.
Toutefois, en ecrivant
dh =∂h
∂x1dx1 +
∂h
∂x2dx2 + . . .+
∂h
∂xndxn,
tout en conservant la relation avec les coordonnees x1, . . ., xn dans le membrede droite, nous nous en debarrassons dans le membre de gauche en ne faisantapparaıtre que dh. Ce dh peut etre definit, a travers la compatibilite des cartes,sur l’ensemble de la variete M. C’est la un avantage de la notation dh.
Exemple 6.18. Le gradient d’un candidat de Lyapunov s’obtient a partir del’expression de V (x) en prenant les derivees partielles en fonction des coor-donnees x1, x2, . . ., xn :
∇V (x) =(
∂V∂x1
∂V∂x2
. . . ∂V∂xn
)
. (6.22)
La 1-forme dV represente egalement ce gradient sous la forme
dV =∂V
∂x1dx1 +
∂V
∂x2dx2 + . . .+
∂V
∂xndxn (6.23)
rendant possible la definition de dV independamment des cartes locales uti-lisees.
Le gradient en tant que champ de co-vecteurs se marie naturellement avecun champ de vecteurs, comme nous le verrons a la section suivante.
6.11 Derivee de Lie
Au chapitre 4, nous avons vu que la deuxieme condition du theoreme destabilite de Lyapunov exige que V ≤ 0 afin que le systeme dynamique x = f(x)soit stable.
Geometriquement, la notation V (x) n’est pas convaincante car la proprietede decroissance de la fonction V est de nature geometrique et la referencea variable temporelle n’est pas vraiment necessaire. En effet, une fois f(x)assimile a un champ de vecteur, la condition V ≤ 0 signifie simplement quele vecteur f(x), en chaque point x de la variete, assure que le systeme evoluevers des courbes de niveau V = cte inferieures ou egales a celle sur laquelle ilse trouve a l’instant considere.
En d’autres termes, lorsque V ≤ 0, f(x) forme un angle inferieur ou egala π
2 par rapport au gradient ∇V en chaque point de l’etat. En effet,

160 6 Elements de Geometrie
d
dtV =
∂V
∂xx =
∂V
∂xf
=(
∂V∂x1
∂V∂x2
. . . ∂V∂xn
)
f1f2...fn
= ∇V f (6.24)
Par consequent, et de maniere generale, si a la fois un champ de vecteurf(x) est donne ainsi qu’une fonction scalaire h(x), alors il est possible dedefinir une nouvelle fonction scalaire, notee Lfh, appelee derivee de Lie de hle long de f , egale au produit scalaire entre le gradient de cette fonction et lechamp de vecteur. Cette derivee represente le taux d’evolution de la fonctionle long du champ de vecteur f(x).
Remarque 6.19. Notons que la derivee de Lie Lfh est l’association naturellepar dualite, en chacun des points x, entre le co-vecteur dh(x) du cotangent T ∗
x
et le vecteur f(x) du tangent Tx. Cette fonction scalaire pourrait tout aussibien s’ecrire
Lfh = dhf,
mettant en exergue l’interpretation a l’aide des espaces T ∗x et Tx. Fondamenta-
lement, le gradient n’appartient pas au meme espace vectoriel que le vecteurf(x). Par abus, nous representons souvent les deux dans le meme plan (enparticulier lors de l’utilisation du plan de phase). Cependant, il est importantde souligner cette difference pour eviter une confusion des concepts.
Definition 6.20. Soit h une fonction et f un champ de vecteurs. La deriveede Lie de la fonction h(x) le long du champ d’un champ de vecteur f(x) estdefinie par
Lfh(x) = ∇h f =∂h
∂xf
=(
∂h∂x1
∂h∂x2
. . . ∂h∂xn
)
f1f2...fn
Comme le resultat est a nouveau une fonction scalaire, il est possible dederiver successivement :
L0fh = 0
Lifh = Lf (Li−1f h) = d(Li−1
f h)f i = 1, 2, . . .

6.12 Crochet de Lie 161
6.12 Crochet de Lie
Dans le courant de ce chapitre et le suivant, il sera question de manipulerdes champs de vecteurs et de verifier des proprietes particulieres de ceux-ci.
Bien que ses proprietes soient essentiellement intrinseques aux champs devecteurs que l’on va considerer, il est neanmoins utile d’avoir a dispositiondes moyens de manipulation et de formulation qui permettent une ecriturecompacte des conditions relatives a leurs proprietes.
En particulier, il sera question de la question d’integrabilite de ceux-ci,a savoir la possibilite qu’un ensemble de champ de vecteurs donnes soienten relation etroite avec une surface courbe. Plus precisement, le champ seradit integrable lorsqu’il est possible de construire une surface (courbe) pourlaquelle en tout point de la surface il est garantit que l’espace tangent a cettesurface soit engendre par les vecteurs du champ en ce point.
Bien que cette propriete est de nature essentiellement globale, elle admetune caracterisation locale, par des proprietes des crochets de champs de vec-teurs.
En effet, deux champs de vecteurs f1 et f2 peuvent etre composes pourconstituer un nouveau champ de vecteur [f1, f2], appele le crochet de Lie,comme suit :
Definition 6.21. (Crochet de Lie) Soit deux champs de vecteurs f1 et f2. Laderivee de Lie des champs de vecteur f et g est donnee par
[f, g] =∂g
∂xf − ∂f
∂xg
L’inconvenient de cette notation est qu’elle devient lourde lorsqu’il estnecessaire d’iterer le crochet par rapport a un meme champ de vecteur. Parexemple, pour noter le resultat des operations [f, [f, g]] et [f, [f, [f, g]]], et ainside suite. Pour y remedier, nous introduisons la notation adjointe suivante
[f, g] = adfg
qui s’applique inductivement
ad0fg = g
adfg = [f, g]
......
adifg = [f, adi−1f g]
= [f, . . . , [f, g]].
A l’aide de cette nouvelle notation, les deux champs de vecteurs [f, [f, g]]et [f, [f, [f, g]]] s’expriment respectivement comme ad2
fg et ad3fg. L’exposant
indique le nombre de fois que le champ f apparaıt a l’interieur des crochetsimbriques.

162 6 Elements de Geometrie
Remarque 6.22. L’expression fffg est parfois egalement utilisee pour designerle champ de vecteur [f, [f, [f, g]]]. Cependant, cette notation est deconseillee,etant donne la possible fausse interpretation. En effet, cette expression pour-rait signifier
[[f, f ], [f, g]]
ou[f, [f, [f, g]]].
La premiere expression est nulle car [f, f ] = 0 par application directe de ladefinition. La seconde n’a pas de raison a priori d’etre nulle. Lorsque fffgest employe, il est d’usage de lui associer un ordre de crochetage particulier,devenant neanmoins ainsi un moyen commode de noter le champ de vecteurcorrespondant.
Exemple 6.23. Soit les deux champs de vecteurs f(x) et g(x) definis par
f(x) =
(
−2x1 + ax2 + sinx1
−x2 cosx1
)
g(x) =
(
0cos(2x1)
)
.
Un calcul des Jacobiens multiplies par le champ complementaire donne
∂g
∂xf =
(
0 0−2 sin(2x1) 0
)(
−2x1 + ax2 + sinx1
−x2 cosx1
)
∂f
∂xg =
(
−2 + cosx1 ax2 sinx1 − cosx1
)(
0cos(2x1)
)
de telle sorte que le crochet s’exprime finalement par
[f, g] =
(
a cos(2x1)2 sin(2x1)(2x1 − ax2 − sinx1) + cosx1 cos(2x1)
)
6.12.1 Proprietes du crochet de Lie
Le crochet de Lie comporte plusieurs proprietes utiles pour les calculs etqui peuvent etre etablies directement a partir de la definition du crochet.
1. Distributivite par rapport a l’addition : Soit deux nombres reels α1, α2 ∈R, alors
[α1f1 + α2f2, g] = α1[f1, g] + α2[f2, g]
[f, α1g1 + α2g1] = α1[f, g1] + α2[f, g2]
2. Anti-commutativite :[f, g] = −[g, f ]

6.13 Differentiation exterieure 163
3. Identite de Jacobi : Soit trois champs de vecteurs f , g, et h
[f, [g, h]] + [g, [h, f ]] + [h, [f, g]] = 0.
4. Derivee de Lie le long d’un crochet :
L[f,g]h = LfLgh− LgLfh
La propriete 4. engendre inductivement de nouvelles relations. En parti-culier,
L[f,[f,g]]h = L2fLgh− 2LfLgLfh− LgL
2fh
6.13 Differentiation exterieure
Pour l’instant, seul les formes differentielles de degre un ont ete envisagees.Le gradient est un exemple. D’un autre cote, les vecteurs de l’espace tangentspeuvent etre composes par differentiation speciale provoquee par le crocheten de nouveaux vecteurs. Ainsi, les champs de vecteurs se composent pourengendrer de nouveaux champs de vecteurs. Chaque nouveau vecteur en unpoint x demeure dans l’espace tangent Tx.
Au paragraphe suivant, nous nous interesserons a la construction d’unesurface a partir d’un ensemble de champ de vecteurs (distribution) de tellesorte qu’en chacun point de la surface l’espace tangent est engendree parles vecteurs de la distribution. Cette surface, si elle existe, est alors decritepar une equation. Cette equation definit ainsi un scalaire qui, lorsqu’il estnul, correspond a la surface. Nous verrons que l’existence de cette surface estintimement liee a la propriete des crochets des champs de vecteurs. Toutefois,etablir cette condition directement est difficile.
Par contre, en prenant le gradient de cette fonction, une forme differentiellede degre un est obtenue. Ceci conduit alors a une interpretation a l’aide dudual T ∗
x de la surface integrale. Pour que la surface soit tangente au champ devecteurs, le gradient doit etre normal a l’ensemble des vecteurs. En effet, si lasurface est tangente aux champs de vecteurs, la derivee de Lie de la fonctionselon chaque champ de vecteur est nul, la quantite en question ne pouvantpas changer lors d’un deplacement le long d’un des champs de vecteurs.
Cependant le calcul par crochets (valable sur l’espace tangent en considerantles champs de vecteur) n’est plus disponible en tant que tel dans l’espace cotan-gent. Il est necessaire d’introduire un nouveau calcul permettant de trouverune condition d’integrabilite exprimable a partir de celui-ci. L’avantage estque l’obtention de cette condition est plus simple et plus directe que lors del’utilisation des crochets.
Au lieu de crocheter les champs de vecteurs en restant dans l’espace vec-toriel Tx, nous construisons des formes differentielles de degre superieur par

164 6 Elements de Geometrie
une operation que l’on appelle differentiation exterieure. En partant de T ∗x on
grimpe dans le produit tensoriel T ∗x ⊗T ∗
x et ainsi de suite T ∗x ⊗ T ∗
x ⊗ . . .⊗T ∗x .
Cette operation est egalement a l’origine de la generalisation du theoremede Stokes. (Rappelons que nous avons utilise ce theoreme pour etablir unecondition d’existence de cycle limite dans le chapitre consacre au plan dephase : la condition de Bendixson.) Il admet une generalisation en dimensionquelconque et s’enonce en utilisant la differentiation exterieure.
Pour introduire cette nouvelle operation, nous commencons par revoir lanotion de differentielle. Celle-ci n’est pas unique et repose sur des choix. Puisnous montrons que deux systemes de differentielles se combinent pour for-mer des expressions alternees exactement comme deux ensembles de variablesengendrent des formes alternees.
La principale raison de l’alternance est liee a l’integration. Il est importantd’associer a un element de surface (ou volume) infinitesimal un sens positif ounegatif en fonction de son orientation. Ensuite nous introduisons l’operation dedifferentiation exterieure permettant de passer d’une integrale sur l’envelopped’un espace donne (integrale de contour le long d’un hyper-espace) vers uneintegrale de l’espace considere (integrale de volume). C’est la generalisationdu theoreme de Stokes.
La raison de l’introduction de cette nouvelle operation ne provient pasdu lien entre ces deux types d’integration, mais plutot par le lien entre cetteoperation et la propriete d’integrabilite qui alors abordee en detail.
6.13.1 Differentielles
Lorsqu’on exprime la differentielle d’une fonction, on entend par la sonaccroissement infinitesimal. Il est exprime par la relation
dΥ =∂Υ
∂x1dx1 +
∂Υ
∂x2dx2 +
∂Υ
∂x3dx3 (6.25)
ou les differentielles dx1, dx2 et dx3 forment un systeme de differentielles,et correspondent generalement a l’accroissement infinitesimal des quantitesgeometriques x1, x2 et x3.
Cependant, et en toute generalite, ces expressions dx1, dx2 et dx3 peuventetre vues que comme des fonctions des coordonnees x1, x2, x3 et d’un nombrearbitraire de nouvelles fonctions. C’est ainsi que nous pouvons considerer unautre systeme de differentielles, disons δx1, δx2 et δx3, qui sont egalementdes fonctions (mais differentes) de x1, x2 et x3 et d’un autre ensemble devariables.
Supposons que nous adoptions comme variables independantes (a la placede x1, x2 et x3), trois fonctions independantes y1, y2 et y3 de x1, x2 et x3.Nous conviendrons de continuer a leur associer les memes differentielles

6.13 Differentiation exterieure 165
dyi =∂yi∂x1
dx1 +∂yi∂x2
dx2 +∂yi∂x3
dx3.
On deduit de la regle de differentiation des fonctions de fonctions que, grace acette convention, dΥ est une quantite qui ne depend pas du choix des variablesindependantes. Cette invariance de dΥ au cours d’un changement de variablesresume les regles qui indiquent comment un changement de varibles transformeles derivees d’une fonction.
Apres le choix d’un autre systeme de differentielles, il est possible deprendre δΥ au lieu de dΥ . Il est aussi important de pouvoir considerer a lafois δdΥ et dδΥ . Ainsi, il est possible de definir les differentielles δi, i = 1, 2, 3des variables autres que x1, x2 et x3 dont dependent les dx1, dx2 et dx3 dontdependent δx1, δx2 et δx3. Nous supposerons toujours qu’il soit possible dechoisir les differentielles de telles sortent que
δdxi = dδxi, i = 1, 2, 3. (6.26)
Par exemple si dxi = ξi(x1, x2, x3), δxi = ηi(x1, x2, x3), i = 1, 2, 3, alors (6.41)s’ecrit
3∑
k=1
(
∂ξi∂xk
ηk − ξk∂ηi∂xk
)
i = 1, 2, 3.
Quand cette relation est verifiee, les symboles d et δ sont dits echangeables. Deplus, si les symboles sont echangeables, ils le sont egalement apres changementde variables.
Normalement, le choix du systeme de differentielles est effectue en fonc-tion de l’interpretation naturelle (geometrique et analytique), a savoir que sidxi, i = 1, 2, 3, sont des accroissements infiniments petits, dΥ est la partieprincipale de l’accroissement correspondant de Υ .
6.13.2 Derivation exterieure d’une 1-forme
Soit la 1-forme
ω = ω1dx1 + ω2dx2 + ω3
Et calculons la difference dω − δω :
dω − δω =
3∑
k=1
dωkδxk − δωkdxk
=
3∑
i=1
3∑
k=1
∂ωk∂xi
(dx1δxk − δxidxk)
=∑
1≤i≤k≤3
(
∂ωk∂xi
− ∂ωi∂xk
)
(dx1δxk − δxidxk) (6.27)

166 6 Elements de Geometrie
On definit la derivee exterieure
ω′ = dω − δω (6.28)
On peut noter de facon abregee la difference dxiδxj−δxidxj sous la formedxi ∧ dxj .
Le produit exterieur d’une 1-forme ω =∑
ωkdxk avec une autre 1-formeω =
∑
ωkdxk est donne par
ω ∧ ω =∑
i,j
ωiωjdxi ∧ dxj
=∑
1≤i≤j≤3
(ωiωj − ωjωi)dxi ∧ dxj
Ainsi en denotant dω au lieu de ω′ :
dω =∑
1≤i≤j≤3
(
∂ωj∂xi
− ∂ωi∂xj
)
dxi ∧ dxj (6.29)
Nous avons la propriete suivante, ou ω est une 1-forme et Υ une fonction :
d(Υω) = dΥ ∧ ω + Υdω (6.30)
6.13.3 Derivation exterieure
Pour une fonction Υ , nous avons l’expression (6.40).
Pour une 1-forme ω = Pdx+Qdy+Rdz, en appliquant (6.45) sur chacundes termes, et en tenant compte de (6.40), nous obtenons
dω = (∂P
∂xdx+
∂P
∂ydy +
∂P
∂zdz) ∧ dx
+(∂Q
∂xdx+
∂Q
∂ydy +
∂Q
∂zdz) ∧ dy
+(∂R
∂xdx+
∂R
∂ydy +
∂R
∂zdz) ∧ dz (6.31)
Comme dxi ∧ dxi = dxiδxi − δxidxi = 0 et dxi ∧ dxj = dxiδxj − δxidxj =−(dxjδxi−δxjdxi) = −dxj∧dxi, nous retombons bien sur l’expression (6.44).
Par consequent, avec Υ une fonction arbitraire des variables x1, x2, . . ., xn,on peut definir de maniere inductive la differentielle exterieure d’une formede degre quelconque en partant d’une forme monome

6.13 Differentiation exterieure 167
α = Υdx1 ∧ dx2 ∧ dx3 ∧ . . . ∧ dxn,
pardα = (dΥ ) ∧ dx1 ∧ dx2 ∧ dx3 ∧ . . . ∧ dxn. (6.32)
Cette operation definie pareillement est la seule qui possede les proprietessuivantes :
1. distributivite par rapport a l’addition :
d(ω + ν) = dω + dν; (6.33)
2. regle de Leibniz en tenant compte de l’anti-symetrie :
d(ω ∧ ν) = dω ∧ ν + (−1)pω ∧ dnu ou ω est une p-forme; (6.34)
3. d est l’operateur de differentiation usuel sur les 0-formes (le gradient surles fonctions) ;
4. d(df) = 0 sur les fonctions f ;
La definition ci-dessus montre que cette operation est independante duchoix des coordonnees et se definit de maniere globale sur la variete. Toutefois,en utilisant des coordonnees locales, nous avons la definition de la differentielleexterieure d’une 1-forme arbitraire suivante :
Definition 6.24. La differentielle exterieure d’une forme arbitraire ω =∑n
j=1 αjdxj est donnee par
dω =
n∑
j=1
(
n∑
i=1
∂αj∂xi
dxi
)
∧ dxj .
6.13.4 Theoreme de Stokes generalise
A l’aide de cette nouvelle propriete de differentiation, et en partant d’une1-forme ω quelconque en dimension n, il est possible d’integrer cette 1-formesur une hyper-surface, sous-variete δΓ englobant un certain volume, la varieteΓ . Quel que soit la dimension n, il est toujours vrai que
∮
∂Γ
ω =
∫ ∫
Γ
dω.
La demonstration se trouve dans bon nombre de livres sur la geometriedifferentielle et nous invitons le lecteur a consulter par exemple [Boo75].

168 6 Elements de Geometrie
6.14 Integrabilite
Nous allons maintenant montrer sous quelles conditions il est possiblede construire une hypersurface perpendiculaire a une 1-forme unique. Cettederniere represente un champ de normales a partir de laquelle la surface estconstruite.
Remarquons que ceci revient au meme que d’etablir sous quelles conditionsun ensemble de champ de vecteur (constituant de la sorte une distribution)engendre, en tout point l’espace, l’espace tangeant a l’hypersurface mentionneeprecedemment.
Une hypersurface dans l’espace est representee comme une seule equationde tous les etats :
C = Υ (x1, x2, x3, . . . , xn), (6.35)
avec une certaine constante C ∈ R.
Cette hypersurface est une surface de dimension n−1 plongee dans l’espacede dimension n. Nous n’envisagerons dans ce qui suit que le caractere local decette hypersurface, au sens ou on ne s’interessera pas de savoir si cette surfaceest definie partout dans l’espace. Nous reviendrons sur le caractere local desresultats par la suite.
La figure 6.3 represente la surface ellipsoıdale
4x21 + x2
2 + 2x23 = 1. (6.36)
-0.5-0.25
0
0.25
0.5
-1
-0.5
0
0.5
1
-0.5
0
0.5
-0.5-0.25
0
0.25
0.5
Fig. 6.3. Illustration de l’ellipse definie par l’equation 4x21 + x2
2 + 2x23 = 1

6.14 Integrabilite 169
Si l’on se place en un point p de cette surface, il est possible de se deplacerde maniere infinitesimale dans l’espace d’etat. Par exemple, si l’on se deplacele long de l’axe x1, et uniquement le long de cet axe, on peut considererdx1 = ǫ > 0, dx2 = dx3 = 0 comme representant un tres petit deplacementparallele a l’axe x1 et n’ayant aucune contribution le long des axes x2 et x3.Toutefois, en considerant un tel deplacement, on quitte instantanement lasurface definie par (6.36).
Par contre, rien n’empeche de prendre un autre deplacement infinitesimalassocie a une valeur particuliere des quantites dx1 = α1, dx2 = α2 et dx3 = α3.
Quelle est alors la condition sur les deplacements infinitesimaux (choix deα1, α2 et α3) afin que l’on demeure sur la surface correspondant a l’equationde l’ellipsoıde (6.36) ?
Si l’on reste sur la surface, la valeur correspondant au membre de gauchede (6.36) ne doit pas changer apres le deplacement et continuer de valoir un.Ainsi, en definissant Υ = 4x2
1 + x22 + 2x2
3, la condition sur les accroissementsest
dΥ =∂Υ
∂x1dx1 +
∂Υ
∂x2dx2 +
∂Υ
∂x3dx3
= 8x1dx1 + 2x2dx2 + 4x3dx3 = 0. (6.37)
Les valeurs αi, i = 1, 2, 3 sont choisies afin de satisfaire cette equation,condition qui peut s’ecrire comme l’annulation du prpduit scalaire :
(
8x1 2x2 4x3
)
dx1
dx2
dx3
= 0.
Par consequent, le vecteur(
8x1 2x2 4x3
)
represente une normale a la sur-face. En effet, un deplacement infinitesimal, choisi afin de rester sur la surfaceΥ = C, respecte la condition (6.37).
Les considerations ci-dessus montrent egalement que l’on peut mettre encorrespondance (isomorphisme) entre les deux entites :
8x1dx1 + 2x2dx2 + 4x3dx3 ↔(
8x1 2x2 4x3
)
. (6.38)
La quantite de gauche est appelee une 1-forme et le vecteur de droite unco-vecteur gradient ou co-vecteur normal selon les circonstances (et par abusde langage vecteur gradient ou vecteur normal, bien que cette quantite decrita proprement parle un champ d’elements qui est dans le dual d’un champ devecteurs, au sens ou chacun des elements en question est un dual d’un vecteur,lui-meme element d’un champ de vecteurs).

170 6 Elements de Geometrie
Fig. 6.4. Representation du champ de normales correspondant a la 1-forme 8x1dx1+2x2dx2 + 4x3dx3. Seule une partie de l’ellipse d’equation 4x2
1 + x22 + 2x2
3 = 1 estrepresentee.
6.15 Difference entre une 1-forme exacte et integrable.
La section precedente montre l’existence d’un champ de co-vecteurs nor-maux a une surface. Etant donne une surface, il existe toujours un champnormal. La question est de savoir si la reciproque est vraie, c’est-a-dire etantdonne un champ de co-vecteurs quelconques, exite-t-il une surface pour la-quelle la normale a cette surface correspond au champ en question ?
Soit donc une fonction Υ de trois coordonnees x1, x2, x3. Il est possiblede constituer une 1-forme en prenant la differentielle totale de la fontion Υ :
dΥ =∂Υ
∂x1dx1 +
∂Υ
∂x2dx2 +
∂Υ
∂x3dx3.
On constate que les coefficients devant dx1, dx2, dx3 sont des fonctions dex1, x2, x3. De plus, ces coefficients ne sont pas arbitraires, puisqu’il sont issusde la fonction Υ , par derivees partielles.
On peut alors s’interroger sur la reciproque, a savoir, etant donne troisfonctions arbitraires de x1, x2 et x3 (disons ω1(x1, x2, x3), ω2(x1, x2, x3) etω3(x1, x2, x3)), existe-t-il une fonction Ψ qui est en relation etroite avec la1-forme
ω = ω1dx1 + ω2dx2 + ω3dx3. (6.39)
Trois cas de figure se presentent :

6.16 Differentielles et derivation exterieure 171
1. Il existe une fonction Ψ(x1, x2, x3) pour laquelle
ωi =∂Ψ
∂xii = 1, 2, 3,
de telle sorte que dΨ = ω. La 1-forme (6.39) est dite exacte dans ce cas etnous avons la reciproque exacte de l’assertion ci-dessus.
2. Il existe une fonction Ψ(x1, x2, x3) et une autre fonction η(x1, x2, x3) tellesque
η(x1, x2, x3)ωi =∂Ψ
∂xii = 1, 2, 3.
Dans ce cas, la 1-forme est dite integrable. Il s’agit donc de trouver unfacteur qui multiplie toutes les composantes de la 1-forme afin que la 1-forme resultante devienne exacte, le facteur variant d’un point a l’autrede l’espace d’etat. La difficulte de l’integration provient de la necessite dedeterminer deux quantites η(x1, x2, x3) et Ψ(x1, x2, x3). Nous avons unesorte de reciproque partielle de l’assertion ci-dessus.
3. La 1-forme (6.39) n’est reliee a aucune fonction Ψ des trois coordonneesx1, x2, et x3 ; elle est alors dite non-integrable. La reciproque de l’assertionci-dessus n’existe pas dans ce cas.
On constate donc qu’une 1-forme exacte est necessairement integrable. Parcontre, il existe des 1-formes integrables qui ne sont pas pour autant exactes.Il nous reste donc a trouver les conditions pour discriminer entre les trois caspossibles. Pour se faire, il est necessaire de developer un calcul infinitesimalparticuler, appele calcul differentiel exterieur.
6.16 Differentielles et derivation exterieure
Differentielles
Les differentielles dx1, dx2 et dx3 forment un systeme de differentielles.Ce sont des fonctions des coordonnees x1, x2, x3 et d’un nombre arbitrairede nouvelles fonctions. Considerons un autre systeme de differentielles, disonsδx1, δx2 et δx3, qui sont egalement des fonctions (mais differentes) de x1,x2 et x3 et d’un autre ensemble de variables. La differentielle d’une fonctionΥ (x1, x2, x3) est par definition
dΥ =∂Υ
∂x1dx1 +
∂Υ
∂x2dx2 +
∂Υ
∂x3dx3 (6.40)
Supposons que nous adoptions comme variables independantes (a la placede x1, x2 et x3), trois fonctions independantes y1, y2 et y3 de x1, x2 et x3.Nous conviendrons de continuer a leur associer les memes differentielles

172 6 Elements de Geometrie
dyi =∂yi∂x1
dx1 +∂yi∂x2
dx2 +∂yi∂x3
dx3.
On deduit de la regle de differentiation des fonctions de fonctions que, grace acette convention, dΥ est une quantite qui ne depend pas du choix des variablesindependantes. Cette invariance de dΥ au cours d’un changement de variablesresume les regles qui indiquent comment un changement de varibles transformeles derivees d’une fonction.
Apres le choix d’un autre systeme de differentielles, il est possible deprendre δΥ au lieu de dΥ . Il est aussi important de pouvoir considerer a lafois δdΥ et dδΥ . Ainsi, il est possible de definir les differentielles δi, i = 1, 2, 3des variables autres que x1, x2 et x3 dont dependent les dx1, dx2 et dx3 dontdependent δx1, δx2 et δx3. Nous supposerons toujours qu’il soit possible dechoisir les differentielles de telles sortent que
δdxi = dδxi, i = 1, 2, 3. (6.41)
Par exemple si dxi = ξi(x1, x2, x3), δxi = ηi(x1, x2, x3), i = 1, 2, 3, alors (6.41)s’ecrit
3∑
k=1
(
∂ξi∂xk
ηk − ξk∂ηi∂xk
)
i = 1, 2, 3.
Quand cette relation est verifiee, les symboles d et δ sont dits echangeables. Deplus, si les symboles sont echangeables, ils le sont egalement apres changementde variables.
Normalement, le choix du systeme de differentielles est effectue en fonc-tion de l’interpretation naturelle (geometrique et analytique), a savoir quesi dxi, i = 1, 2, 3, sont des accroissements infiniments petits, dΥ est la partieprincipale de l’accroissement correspondant de Υ . Toutefois, les considerationsci-dessus montrent qu’il est possible de definir des differentielles ”abstraites”(disons δxi) pour autant qu’elles soient compatibles avec un calcul differentielapproprie.
Derivation exterieure
Soit la 1-forme
ω = ω1dx1 + ω2dx2 + ω3
Et calculons la difference dω − δω :

6.17 Proprietes de la differentielle exterieure 173
dω − δω =
3∑
k=1
dωkδxk − δωkdxk
=
3∑
i=1
3∑
k=1
∂ωk∂xi
(dx1δxk − δxidxk)
=∑
1≤i≤k≤3
(
∂ωk∂xi
− ∂ωi∂xk
)
(dx1δxk − δxidxk) (6.42)
On definit la derivee exterieure
ω′ = dω − δω (6.43)
On peut noter de facon abregee la difference dxiδxj−δxidxj sous la formedxi ∧ dxj .
Le produit exterieur d’une 1-forme ω =∑
ωkdxk avec une autre 1-formeω =
∑
ωkdxk est donne par
ω ∧ ω =∑
i,j
ωiωjdxi ∧ dxj
=∑
1≤i≤j≤3
(ωiωj − ωjωi)dxi ∧ dxj
Ainsi en denotant dω au lieu de ω′ :
dω =∑
1≤i≤j≤3
(
∂ωj∂xi
− ∂ωi∂xj
)
dxi ∧ dxj (6.44)
Nous avons la propriete suivante, ou ω est une 1-forme et Υ une fonction :
d(Υω) = dΥ ∧ ω + Υdω (6.45)
6.17 Proprietes de la differentielle exterieure
Pour une fonction Υ , nous avons l’expression (6.40).
Pour une 1-forme ω = Pdx+Qdy+Rdz, en appliquant (6.45) sur chacundes termes, et en tenant compte de (6.40), nous obtenons

174 6 Elements de Geometrie
dω = (∂P
∂xdx+
∂P
∂ydy +
∂P
∂zdz) ∧ dx
+(∂Q
∂xdx+
∂Q
∂ydy +
∂Q
∂zdz) ∧ dy
+(∂R
∂xdx+
∂R
∂ydy +
∂R
∂zdz) ∧ dz (6.46)
Comme dxi ∧ dxi = dxiδxi − δxidxi = 0 et dxi ∧ dxj = dxiδxj − δxidxj =−(dxjδxi−δxjdxi) = −dxj∧dxi, nous retombons bien sur l’expression (6.44).
Par consequent, avec Υ une fonction arbitraire des variables x1, x2, . . ., xn,on peut definir de maniere inductive la differentielle exterieure d’une formede degre quelconque en partant d’une forme monome
α = Υdx1 ∧ dx2 ∧ dx3 ∧ . . . ∧ dxn,
pardα = (dΥ ) ∧ dx1 ∧ dx2 ∧ dx3 ∧ . . . ∧ dxn. (6.47)
En resume, nous avons la definition de la differentielle exterieure d’une1-forme arbitraire suivante :
Definition 6.25. La differentielle exterieure d’une forme arbitraire ω =∑n
j=1 αjdxj est donnee par
dω =n∑
j=1
(
n∑
i=1
∂αj∂xi
dxi
)
∧ dxj .
Le produit exterieur est anti-symetrique et il preserve la linearite apresmultiplication. Ces principales proprietes sont :
dxi ∧ dxj = −dxj ∧ dxi (6.48)
Υ (x)(ω1 ∧ ω2) = ω1 ∧ (Υ (x)ω2) = (Υ (x)ω1) ∧ ω2 (6.49)
ω1 ∧ (ω2 + ω3) = ω1 ∧ ω2 + ω1 ∧ ω3
6.18 Condition d’exactitude et d’integrabilite
Maintenant que nous sommes en possession d’un nouveau type de calcul(la differentiation exterieure), nous allons reexaminer les questions soulevees ala section 6.15 en determinant les conditions permettant de decider du type de1-forme que nous avons a faire. Ces conditions sont des expressions calculablesfacilement a partir des coefficients de la 1-forme.

6.18 Condition d’exactitude et d’integrabilite 175
Condition d’exactitude
Soit une 1-forme exacte
ω = Pdx+Qdy +Rdz. (6.50)
Par definition, il existe une fonction Υ telle que
P =∂Υ
∂x, Q =
∂Υ
∂y, et R =
∂Υ
∂z.
Calculons la differentielle exterieure de ω en utilisant (6.44) ou (6.40) :
dω =∂2Υ
∂y∂xdy ∧ dx+
∂2Υ
∂z∂xdz ∧ dx
∂2Υ
∂x∂ydx ∧ dy +
∂2Υ
∂z∂ydz ∧ dy
∂2Υ
∂x∂zdx ∧ dz +
∂2Υ
∂z∂zdy ∧ dz.
En utilisant (6.48), on deduit que
dω) = 0,
concluant sur la necessite de cette condition.
Pour en demontrer la suffisance, supposons que ω soit exacte (c.-a-d. queω soit le gradient d’une fonction) mais que dω 6= 0. Nous allons montrer qu’ily a une contradiction. Pour la voir, il suffit d’appliquer le theoreme de Stokes
∫
V
dω =
∮
∂V
ω,
ou V est un petit parallelepipede. Comme ω provient d’une fonction, les contri-butions sur les cotes ∂V du parallelepipede V se compensent de telle sorte quel’integrale de droite est nulle. Comme dω 6= 0, par supposition, l’integrale degauche est non nulle, ce qui contredit l’egalite des deux integrales.
Ceci se generalise a un nombre arbitraire de variables et nous avons doncle theoreme suivant valable localement
Theoreme 6.26. Une 1-forme ω est localement exacte si, et seulement si,
dω = 0.
Condition d’integrabilite
La condition d’integrabilite est plus subtile etant donne qu’une fonctionη est manquante (inconnue) pour transformer la 1-forme integrable ω en une1-forme exacte ηω.

176 6 Elements de Geometrie
Dans un premier temps, supposons que la 1-forme (6.50) soit integrable.Ceci signifie que P , Q, et R, sont proportionnels aux derivees partielles d’unecertaine fonction Υ par rapport a respectivement x, y et z :
ηP =∂Υ
∂x, ηQ =
∂Υ
∂y, et ηR =
∂Υ
∂z. (6.51)
A partir des deux premieres equations, nous obtenons
∂
∂y(ηP ) =
∂2Υ
∂x∂y=
∂
∂x(ηQ);
en d’autres termes,
η∂P
∂y+ P
∂η
∂y= η
∂Q
∂x+Q
∂η
∂x,
ou, ce qui revient au meme,
η
(
∂P
∂y− ∂Q
∂x
)
= Q∂η
∂x− P
∂η
∂y. (6.52)
De maniere similaire, avec les deux dernieres equations de (6.51),
η
(
∂Q
∂z− ∂R
∂y
)
= R∂η
∂y−Q
∂η
∂z(6.53)
η
(
∂R
∂x− ∂P
∂z
)
= P∂η
∂z−R
∂η
∂x. (6.54)
En multipliant (6.52) par R, (6.53) par P, et (6.54) par Q, et en aditionnantle tout, il vient finalement la condition
P
(
∂Q
∂z− ∂R
∂y
)
+Q
(
∂R
∂x− ∂P
∂z
)
+R
(
∂P
∂y− ∂Q
∂x
)
= 0. (6.55)
Par consequent, lorsque il est possible de determiner une fonction qui rendla 1-forme ω, apres multiplication par cette fonction, exacte, alors la condition(6.55) est satisfaite.
En outre, Il est aise de montrer que si l’on prend au lieu de P , Q et R,des nouvelles fonctions P1 = λP , Q1 = λQ et R1 = λR, ou λ est une fonctionquelconque, la condition (6.55) continue a etre verifiee lorsqu’on remplace Ppar P1, Q par Q1, et R par R1.
La reciproque est egalement vraie, a savoir que si la condition (6.55) estsatisfaite, alors la 1-forme ω est integrable, ou en d’autres termes, il existeune integrale
Υ (x, y, z) = 0.

6.18 Condition d’exactitude et d’integrabilite 177
Pour le voir, nous allons d’abord revenir en dimension deux. Lorsque P et Qsont des fonctions de x et y uniquement, l’equation differentielle
Pdx+Qdy = 0, (6.56)
est garantie de posseder une solution u(x, y) = c, ou c est une constante, quelque soit P et Q.
Ceci est toujours possible, car il suffit d’ecrire (6.56) sous une des deuxformes
dx
dy= −Q
P
oudy
dx= −P
Q,
selon que P 6= 0 ou Q 6= 0 ; aucune des deux fonctions ne peut, par hypothese,s’annuler simultanement, sinon cela conduirait a un systeme trivial 0 = 0.
En integrant une de ces deux equations differentielles ordinaires de maniereclassique (celle dont le membre de droite ne devient pas singulier), nous ob-tenons, apres mise sous forme implicite, l’expression u(x, y) = c. En derivantu(x, y), on a
∂u
∂xdx+
∂u
∂ydy = 0,
ce qui revient a dire que P = λ∂u∂x , Q = λ∂u∂x , ou λ est une fonction quelconque.
Lorsqu’il y a trois variables, bien qu’il puisse etre possible, par la methodedecrite ci-dessus, de garantir que P et Q soient proportionnels aux deriveespartielles de Υ par rapport a x et y (il suffit de poser Pdx + Qdy = 0 etde resoudre l’equation differentielle ordinaire sous jacente, en considerant zcomme un parametre constant), R ne sera pas necessairement proportionnela ∂Υ∂z .
Neanmoins, soit u(x, y, z) une telle fonction, de sorte qu’il existe une fonc-tion λ(x, y, z) pour laquelle
P1 = λP =∂u
∂xQ1 = λQ
∂u
∂y.
Nous definissons S comme la quantite manquante pour que R1 soit direc-tement proportionnel ∂u∂z , c.-a-d.
R1 −∂u
∂z= λR − ∂u
∂z= S (6.57)
Maintenant, en substituant
P1 =∂u
∂zQ1 =
∂u
∂yR1 =
∂u
∂z+ S

178 6 Elements de Geometrie
dans
P1
(
∂Q1
∂z− ∂R1
∂y
)
+Q1
(
∂R1
∂x− ∂P1
∂z
)
+R1
(
∂P1
∂y− ∂Q1
∂x
)
= 0
(equation qui est automatiquement satisfaite etant donne que (6.55) est sa-tisfaite), nous obtenons
∂S
∂x
∂u
∂y− ∂S
∂y
∂u
∂x= 0. (6.58)
C’est ainsi que deux cas de figure se presentent. Ou bien R1 est propor-tionnel a ∂u
∂z , auquel cas Υ = u est l’integrale cherchee, ou alors S est unefonction non nulle qui satisfait identiquement l’equation (6.58).
Cependant, (6.58) est satisfaite si, et seulement si, il existe une relationentre S et u valable quelles que soient les valeurs particulieres de x et y, c-a-d.que u peut s’exprimer directement a partir de S et vice versa :
u = g(S) S = f(u).
Toutefois, la presence de z en tant que parametre dans u(x, y, z) impliquesa presence egalement en tant que parametre dans l’equation (6.58), ce quisignifie qu’il faille l’introduire dans l’expression
S = f(u, z),
bien que x et y n’apparaissent plus independamment l’une de l’autre, maisseulement sous forme combinee par l’intermediaire de la fonction u(x, y, z).
C’est ainsi que nous pouvons ecrire
λ(Pdx+Qdy +Rdz) =∂u
∂xdx+
∂u
∂ydy +
∂u
∂zdz + Sdz
= du+ Sdz, (6.59)
ou S s’exprime en fonction uniquement de u et z. Nous avons donc obtenu une1-forme en dimension deux pour laquelle l’integrale est garantie d’exister partransformation en une equation differentielle ordinaire et integration classique.Sous forme implicite ceci donne
Ψ(u, z) = cte,
avec∂Ψ
∂u= µ
∂Ψ
∂z= µS.
Par consequent,
λµ(Pdx+Qdy +Rdz) = µ(du+ Sdz) = dΨ,
conduisant apres subsititution de u(x, y, z) dans Ψ(u, z) a l’integrale

6.18 Condition d’exactitude et d’integrabilite 179
Ψ(u, z) = Υ (x, y, z).
Ces considerations se generalisent en dimension plus grande que trois,conduisant au theroreme d’integrabilite d’une 1-forme suivant :
Theoreme 6.27. Une 1-forme ω est integrable si, et seulement si,
dω ∧ ω = 0. (6.60)

180 6 Elements de Geometrie
La demonstration, en dimension trois, a deja ete effectuee ci-dessus. Ilsuffit de constater que (6.60) conduit en partant de ω = Pdx+Qdy +Rdz al’expression (6.55). Pour le voir, commencons par calculer dω :
dω =
(
∂P
∂xdx+
∂P
∂ydy +
∂P
∂zdz
)
∧ dx
+
(
∂Q
∂xdx +
∂Q
∂ydy +
∂Q
∂zdz
)
∧ dy
+
(
∂R
∂xdx +
∂R
∂ydy +
∂R
∂zdz
)
∧ dz
=
(
∂P
∂ydy +
∂P
∂zdz
)
∧ dx
+
(
∂Q
∂xdx +
∂Q
∂zdz
)
∧ dy
+
(
∂R
∂xdx +
∂R
∂ydy
)
∧ dz
ou nous avons utiliser (6.48). Ensuite, en prenant le produit exterieur, eten distribuant selon (6.49), on obtient
dω ∧ ω =
(
∂P
∂ydy +
∂P
∂zdz
)
∧ dx ∧ (Pdx+Qdy +Rdz)
+
(
∂Q
∂xdx+
∂Q
∂zdz
)
∧ dy ∧ (Pdx+Qdy +Rdz)
+
(
∂R
∂xdx+
∂R
∂ydy
)
∧ dz ∧ (Pdx+Qdy +Rdz)
= R∂P
∂ydy ∧ dx ∧ dz +Q
∂P
∂zdz ∧ dx ∧ dy
+ R∂Q
∂xdx ∧ dy ∧ dz + P
∂Q
∂zdz ∧ dy ∧ dx
+ Q∂R
∂xdx ∧ dz ∧ dy + P
∂R
∂ydy ∧ dz ∧ dx
= −
P
(
∂Q
∂z− ∂R
∂y
)
+Q
(
∂R
∂x− ∂P
∂z
)
+R
(
∂P
∂y− ∂Q
∂x
)
dx ∧ dy ∧ dz,
de sorte que la condition (6.55) est equivalente a dω ∧ ω = 0.
Exemples
Nous donnons trois exemples simples de 1-formes :

6.19 Interpretation geometrique de l’integrabilite et de la non-integrabilite 181
– La 1-forme ω1 = (z+1)dx+xdz est exacte, car une fois pose Υ = x(1+z),l’utilisation de la formule (6.40) donne d(x(1 + z)) = ω1.
– La 1-forme ω2 = z+1x dx + dz n’est pas exacte. Par contre, elle est
integrable, etant donne que xω2 = ω1.– La 1-forme ω3 = (−x + y + yz)dx + x(1 + z)dz n’est pas integrable
puisque ω3 ∧ dω3 = −x(1 + z)2dx ∧ dy ∧ dz 6= 0.
6.19 Interpretation geometrique de l’integrabilite et de
la non-integrabilite
La figure 6.5 illustre le cas d’une 1-forme exacte ω = yzdx+ xzdy+ xydz,pour laquelle la fonction integral est Υ = xyz −C = 0, avec C une constantearbitraire.
On constate que les fleches - vecteur ligne(
yz xz yz)
- sont perpendicu-laires en chacun de point de la surface integrale. Elles definissent non seule-ment un champ normal, mais correspondent exactement au gradient de lafonction integrale Υ .
Fig. 6.5. la 1-forme ω = yzdx + xzdy + xydz exacte est representee avec troissurfaces integrales xyz = cte.
Lorsque la 1-forme n’est plus exacte, mais toutefois integrable, la longueurde la fleche n’a en quelque sorte pas d’importance, et seul son orientationcompte. Ainsi, si au lieu de ω, nous aurions pris une fonction arbitraire η,modifiant en chacun des points la norme de la fleche a ce point, mais pas sonorientation, les fleches demeureraient normales aux surfaces integrales Υ = 0.La 1-forme ηω possedent donc les memes surfaces integrales que ω.
Dans le cas d’une 1-forme non integrable, les orientations des normalesbloquent en quelque sorte le processus d’integration. Nous allons examiner deplus pres une explication geometrique de ce phenomene.

182 6 Elements de Geometrie
-2
-1.5
-1
-0.5
0.51
1.52
-2
-1
0
1
-2
-1.5
-1
-0.5
0.51
1.5
-1
0
1
-2
-1.5
-1
-0.5
0.51
1.52
-2
-1
0
1
-2
-1.5
-1
-0.5
0.51
1.5
-1
0
1
-2
-1.5
-1
-0.5
0.51
1.52
-2
-1
0
1
-2
-1.5
-1
-0.5
0.51
1.5
-1
0
1
Fig. 6.6. (i) La 1-forme integrable ω = yzdx + xzdy + xydz est representee. (ii)La courbe Ξ est toujours orientee dans le sens des 1-forme. (iii) Les deux surfacesintegrales x2−y2 = c1 et y2 −z2 = c2 des 1-formes complementaires (6.63) et (6.64)(c.-a-d. xzdx−yzdy et xydy−xzdz) se coupent exactement pour donner Ξ. (iv) Lessurfaces integrales a ω, a savoir xyz = c, c ∈ R pour quatre valeurs de c differentes,sont ajoutees.

6.19 Interpretation geometrique de l’integrabilite et de la non-integrabilite 183
Soit
Pdx+Qdy +Rdz, (6.61)
une 1-forme arbitraire, a partir de laquelle deux equations supplementaires dedeux 1-formes chacune sont constituees :
dx
P=dy
Q=dz
R. (6.62)
Ce systeme est toujours integrable (meme lorsque (6.61) ne l’est pas), car ilcomporte deux 1-formes independantes comprenant trois variables chacunes.Ce sont, par exemple, les 1-formes
Qdx− Pdy = 0 (6.63)
etRdy −Qdz = 0. (6.64)
Ces deux equations doivent etre satisfaites simultanement sur leur varieteintegrale, ce qui est toujours le cas, etant donne qu’il est possible d’assignerune variable independante y, et de former le systeme d’equations differentiellesordinaires
dx
dy=P
Q(6.65)
dz
dy=R
Q(6.66)
dont la solution - et par consequent egalement la solution de (6.62) - estconstitue par un ensemble infini de courbes x(y) et z(y), parametree par lacoordonnee y libre ; chacune de ces courbes part, a la coordonnee y0, d’unecondition initiale x(y0), z(y0) differente.
Remarquons que si Q s’annule le long de l’integration, il suffit de prendrel’annulation de deux autres 1-formes issues de (6.62) au lieu de Qdx−Pdy = 0et Rdy −Qdz = 0.
Nous designerons par Ξ une courbe parmis cet ensemble ainsi obtenu. Enpartant d’un certain point de cette courbe Ξ, disons A, il est possible de sedeplacer, soit dans la direction de cette courbe le long de son vecteur tangent,soit perpendiculairement a celui-ci, dans un nombre infini de directions pos-sibles. Ces directions perpendiculaires sont contenues dans la plan de supportdes vecteurs lignes (6.63) et (6.64), a savoir
(
Q −P 0)
et(
0 R −Q)
. Ce plansera denomme le plan perpendiculaire a Ξ au point considere.
Independamment des considerations precedentes, choisissons une surfacequelconque ψ(x, y, z) = 0 de telle sorte que la point A soit compris dans cette

184 6 Elements de Geometrie
surface. Notons que Ξ n’appartient pas necessairement a cette surface choisiede maniere arbitraire.
Maintenant, une solution a (6.61), (qui est une 1-forme quelconque, maispas necessairement integrable), s’obtient de la maniere suivante : On sedeplace dans le plan perpendiculaire a Ξ au point A. Il existe une infinitede tels deplacements. Cependant, il y a un seul deplacement dans la surfaceψ(x, y, z) = 0 dans cette direction. C’est le prochain point desire A1.
On repete alors la procedure :
1. on construit la courbe Ξ passant a traver A1 et qui satisfait le systeme(6.62) ;
2. on construit le vecteur ξ au point A1, tangent a la courbe Ξ le long decelle-ci.
3. parmis tous les co-vecteurs perpendiculaires au vecteur tangent ξ, il enexiste un qui correspond a un deplacement au sein de la surface ψ(x, y, z). ;
4. on se deplace a ce nouveau point A2.
Ainsi, la solution est dependante de la surface ψ(x, y, z) choisie. Une foiscette surface choisie, la solution est une famille de courbes dependant du pointinitial A. Pour un point A determine, il y a une seule courbe particuliere.
Dans le cas d’une 1-forme integrable, il est possible de choisir la surfaceψ(x, y, z) de telle sorte que tout deplacement infinitesimal a l’interieur de cettesurface soit perpendiculaire au vecteur ξ tangent a la courbe Ξ solution de(6.62). Par consequent, la solution est assimilee a la surface ψ(x, y, z) = 0complete et non plus a une courbe specifique. Le resultat (de l’integration)est independant de Ξ, solution de (6.62) : Ξ n’a pas d’influence sur le choixde courbe comprise dans dans ψ(x, y, z) = 0. Mais bien entendu, on ne peutplus choisir ψ(x, y, z) librement, contrairement au cas non-integrable (c.-a-d.lorsque la condition ω ∧ dω = 0 n’est pas satisfaite).
On peut ainsi interpreter le resultat comme le fait que la normale a lasurface ψ(x, y, z) = 0 (qui est
(
P Q R)
est toujours colineaire au champ devecteurs correspondant au systeme (6.62) (celui definissant ξ et Ξ ; afin que lessurfaces coupent Ξ a angle droit). Le champ de vecteurs est dans l’annulateurdes formes constitutives
P
dx=
Q
dy=R
dz(6.67)
Le cas d’une 1-forme integrable est illustre a la figure 6.6.
6.20 Les deux formes du theoreme de Frobenius
Soit les equations aux derivees partielles suivantes :

6.20 Les deux formes du theoreme de Frobenius 185
0
1
2
3
0
0.5
1
1.5
2
6.5
6.75
7
7.25
7.5
1
2
3
6.5
6.75
AA’
Ξ
z
y
x
Fig. 6.7. Representation de la construction d’une solution de ω = 0 lorsque la1-forme ω n’est pas integrable. Le cas de ω = (−x − y + yz)dx + x(1 + z)dz =
Pdx + Rdz conduit a l’equation differentielle dzdx
= x(1+z)−x−y+yz
et dy
dx= 0 definissant
la courbe Ξ. Cette courbe est representee pour la condition initiale x = 0, y(0) = 1et z(0) = 2. Le point A est pris en x = 2, y = 1 et z = 7.07. Comme Q = 0, leplan de support est definit par (R 0 − P )T et (0 R − Q)T . La surface arbitraireψ(x, y, z) = 1
2cos(4(y− 1))(x− 2)2 + 1
2sin(4(y− 1))(y− 1)2 + 7.07 intersecte le plan
de support selon une courbe sur laquelle le prochain point A1 = A′ se situe. Lasolution depend de la surface ψ(x, y, z) choisie.
∂h
∂x1f1 +
∂h
∂x2f2 +
∂h
∂x3f3 = 0 (6.68)
∂h
∂x1g1 +
∂h
∂x2g2 +
∂h
∂x3g3 = 0 (6.69)
Avec fi(x1, x2, x3) et gi(x1, x2, x3), i = 1, . . . , 3 des fonctions donnees.
Il existe deux formulation des conditions necessaires et suffisantes pourl’existence d’une fonction h(x1, x2, x3) qui satisfasse les equations (6.68) et(6.69).
La premiere formulation utilise directement les deux champs de vecteurs(
f1 f2 f3)T
et(
g1 g2 g3)T
:

186 6 Elements de Geometrie
1
1.25
1.5
1.75
2
0
0.5
1
1.5
2
0
0.5
1
1.5
1.25
1.5
1.75
2
Ξ
z
y
x
Fig. 6.8. Dans le cas integrable il est possible de trouver une surface pour laquelletout les deplacements infinitesimaux sont possibles. Le cas de ω = yzdx
Theoreme 6.28. h(x1, x2, x3) est une solution si, et seulement si, le crochetde f et g retombe dans l’espace engendre par f et g, c.-a-d. qu’il existe deuxfonctions scalaires de x, disons α1(x) et α2(x) de M → R telles que
[f, g](x) = α1(x)f(x) + α2(x)g(x).
Pour avoir un resultat local, il n’est pas necessaire de tester la conditionci-dessus sur toute la variete M mais autour d’un voisinage ou l’on aimeraitconstruire la fonction h(x1, x2, x3).
Ce theoreme permet de rattacher la condition d’integrabilite de la fonctionh a celle de la distribution engendree par les champs de vecteurs :
Definition 6.29. Une distribution (genere par f1 et f2) pour laquelle lafonction h satisfasse aux equations (6.68) et (6.69) est dite completementintegrable.
La seconde formulation du theoreme de Frobenius utilise la 1-forme uniquequi est perpendiculaire aux champs de vecteurs f1 et f2. Soit ω la 1-forme enquestion de telle sorte que
ωf1 = ωf2 = 0. (6.70)

6.20 Les deux formes du theoreme de Frobenius 187
Theoreme 6.30. h(x1, x2, x3) est une solution
⇔
ω ∧ dω = 0.
La seconde condition exprime simplement que la 1-forme doit etre integrable.En fait, le gradient de h ne differe de ω que par une fonction inconnue qu’ils’agit de determiner comme cela a ete demontre a la section 6.14.
Nous formulerons les deux conditions dans le cas d’une dimension de l’etatplus grande que trois et nous verrons que ces deux theoremes sont identiques.La seconde formulation a deja ete demontree dans le cas de trois variables ; lademonstration dans le cas d’un plus grand nombre de variables suit les memeslignes.
Nous nous contenterons donc de montrer que la premiere formulation estequivalente a la seconde. Dans le cas de plus de trois variables, la premiere for-mulation s’enonce a partir du concept de distribution involutive (aussi appeleefamille involutive par abus de langage pour designer une famille de champ devecteurs qui est involutive).
Distribution involutive
Definition 6.31. On dit que la distribution engendree par une famille dechamp de vecteurs f1, f2, . . ., fn est involutive, lorsque
∀fi, fj, i, j = 1, . . . n
[fi, fj] ∈ span f1, f2, . . . , fn
ou span signifie ”sous-espace vectoriel engendre par”.
Ainsi, une famille involutive est une collection de champ de vecteur telsque si on prend n’importe quel couple de vecteurs y appertenant et que l’onen prenne le crochet de Lie, le champ de vecteur resultant retombe dansla distribution. Ceci signifie qu’en chaque point de la variete, le crochet dedeux vecteurs appartenant au sous-espace vectoriel engendre par les vecteursdefinissant la distribution demeure dans le sous-espace vectoriel en question.
Nous avons egalement besoin de la propriete
dω(f, g) =1
2(Lf (ωg) − Lg(ωf) − ω[f, g]) . (6.71)
Elle decoule de la derivation exterieure d’une 1-forme arbitraire ω mais ex-primee sans recours aux coordonnees locales. La 2-forme dω est evaluee selondeux vecteurs arbitraires f et g afin de donner un nombre qui s’exprime direc-tement a partir des derivees de Lie des quantitee ωf et ωg (ces dernieres sont

188 6 Elements de Geometrie
des valeurs scalaires). Il reste toutefois un terme supplementaire qui depend ducrochet de Lie des deux vecteurs f et g et c’est la que reside esstentiellementle lien entre les deux formulations du theoreme de Frobenius.
La propriete (6.71) se demontre par calcul direct. La procedure est un peufastidieuse mais ne presente pas de difficulte particuliere et nous en laissantle soin au lecteur.
Nous donnons maintenant la formulation des deux formes du theoreme deFrobenius dans le cas d’une distribution definie par n− 1 champ de vecteursde n coordonnees (la variete est de dimension n).
Theoreme 6.32. Un ensemble de n− 1 champ de vecteurs f1, f2, . . . , fn−1definit une distribution integrable si, et seulement si, la distribution est invo-lutive.
Theoreme 6.33. Soit ω, la 1-forme qui annule tous les champs de vecteursf1, f2, . . ., fn−1. La 1-forme ω et la distribution definie par les champs f1,f2, . . ., fn−1 sont integrables si, et seulement si,
ω ∧ dω = 0.
Nous savons que, par definition, une distribution consitituee de n−1 champde vecteurs est integrable s’il existe une fonction h tel que son gradient annulela distribution en question. Par consequent, il suffit de verifier que la conditiond’integrabilite ω ∧ dω = 0 est equivalente a l’involutivite de la distributionf1, f2, . . . , fn−1.
Commencons par admettre que la distribution est involutive. Ceci signifieque quelque soit i, j, les crochets [fi, fj ] s’expriment [fi, fj ] =
∑n−1k=1 αk(x)fk.
Comme ω est choisi de telle sorte que ωfk = 0, k = 1, . . . , n − 1, on a doncω[fi, fj ] = 0 pour tout choix de i et j (ceci decoule directement de l’invo-lutivite). C’est ainsi qu’en utilisant (6.71), on a dω(fi, fj) = 1
2 (Lfj(ωfi) −
Lfi(ωfj)−ω[fi, fj ]) = 1
2 (Lfj(ωfi)−Lfi
(ωfj) = 0, et donc dω(fi, fj) = 0 pourautant que fi, et fj appartienne a la distribution.
Attention, ceci ne signifie par pour autant que dω(f1, f2) = 0 quel que soitf1 et f2.
Toutefois, comme la distribution est de rang n− 1, et puisque dω s’annulesur cette distribution, dω se decompose selon deux 1-formes dont une au moinsest multiple de ω. En d’autres termes,
dω = ω1 ∧ α(x)ω.
En effet, supposons que cela ne soit pas le cas et que dω = ω1 ∧ ω2
de telle sorte que ni ω1 ni ω2 ne soit multiple de ω. Ceci signifie, parindependance lineaire des f1, f2, . . ., fn−1, qu’il existe alors une combinai-son lineaire f =
∑n−1i=1 βifi pour laquelle a la fois ω1f 6= 0 et ω2f 6= 0 et

6.20 Les deux formes du theoreme de Frobenius 189
nous aboutissons a la contradiction que dω ne s’annule pas sur la distributionF = span f1, . . . , fn−1.
Ainsi, comme dω = ω1 ∧ α(x)ω, nous avons necessairement
dω ∧ ω = 0,
et la correspondance de la premiere formulation a la seconde est demontree.
Dans l’autre sens, nous supposerons que dω ∧ ω = 0 et nous devons alorsmontrer que la distribution annulant ω est involutive.
Premierement, et quelque soit ω, integrable ou non, il est toujours possiblede trouver des champs de vecteurs f1, . . ., fn−1 qui annulent ω.
Remarquons egalement que dω peut toujours s’exprimer comme un produitexterieur de deux 1-formes, quel que soit les proprietes particulieres de ω.Maintenant, comme dω ∧ ω = 0, ceci signifie, comme precedemment, queune de ces deux formes doive etre proportionnelle a ω, car sinon la conditiond’integrabilite ne serait pas satisfaite.
Ainsi, et sans perte de generalite, nous pouvons assumer
dω = ω1 ∧ α(x)ω, (6.72)
ou α(x) est une fonction scalaire arbitraire.
Maintenant, nous savons par construction que la 1-forme ω annule toutchamp vecteur dans la distribution F = span f1, . . . , fn−1. Par consequent,quel que soit les champs de vecteurs f ∈ F et f ∈ F , nous aurons a cause de(6.72)
dω(f, f) = 0. (6.73)
En utilisant la propriete (6.71), nous avons
dω(f, f) =1
2
(
Lf(ωf) − Lf(ωf) − ω[f, f ])
= −1
2ω[f, f ] = 0.
Par consequent [f, f ] ∈ F . Comme le choix de f et f est arbitraire, ladistribution F est bien involutive, ce qui conclut sur l’equivalence des deuxformes du theoreme de Frobenius.


7
Commande par linearisation
Le present chapitre aborde les techniques qui ont comme objectif d’exploi-ter la possibilite d’utiliser des techniques lineaires pour la synthese d’une loide commande en essayant de garantir un ensemble de stabilite le plus grandpossible. Nous ne traiterons que des systemes comportant une seule entree.
Une maniere de proceder est de tranformer, par l’entremise d’un bouclage,le systeme initial en un systeme equivalent lineaire, a partir duquel des tech-niques de synthese lineaires peuvent etre appliquees. Le modele lineaire lemieux approprie est le systeme lineaire le plus simple possible, c.-a-d. unechaıne d’integrateurs.
Nous distinguons essentiellement deux methodes, celle qui transforme l’en-semble de l’etat initial en une chaıne d’integrateurs. Cette chaıne contient alorsautant d’integrateurs que le nombre d’etats utilises pour decrire le systeme ori-ginellement. La seconde consiste a ne transformer qu’une sous partie associeea une sortie du systeme assignee des le depart. Il faut alors faire attention a ceque la partie rendue inobservable par le bouclage sur la sortie ne destabilisepas les etats qui ne sont pas pris en compte par l’equivalence avec la chaıned’integrateurs.
Nous traiterons essentiellement du probleme de regulation et de la pour-suite de trajectoire. Ces objectifs peuvent etre definis en fonction du conceptd’equation differentielle d’erreur. Nous presentons egalement une techniquede commande en boucle ouverte ou commande a priori.

192 7 Commande par linearisation
7.1 Linearisation locale et stabilisation
Soit x = f(x, u) une representation du systeme non lineaire pour lequelon aimerait trouver un regulateur garantissant la stabilite et la convergencerapide vers un point d’equilibre desire.
Une premiere idee consiste a ne retenir que les effets directs de f(x, u) surl’evolution temporel de l’etat x. Ceci revient a ne retenir que le premier ordredu developpement de Taylor de la fonction f(x, u).
En effet, lorsque les signaux (grandeurs d’etat) sont comparables a la valeurnominale autour de laquelle le developpement de Taylor est affectue (l’erreurest alors petite), les premiers termes dominent les autres, et ils constituentalors une bonne approximation du systeme non lineaire.
Cette methode de linearisation est tres repandue, car c’est sans doute lamethode la plus simple permettant d’utiliser un paradigme lineaire pour lasynthese. En partant du systeme initial
x = f(x, u),
ou l’on suppose sans perte de generalite que 0 = f(0, 0), une representationd’etat d’un systeme lineaire equivalent est calculee :
x = Ax +Bu.
Les matrices A et B sont alors donnee respectivement par
A =∂f
∂x
∣
∣
∣
∣
x=0,u=0
et
B =∂f
∂u
∣
∣
∣
∣
x=0,u=0
.
Ensuite, un regulateur d’etat u = −Kx est elabore qui transforme lesysteme dynamique initial x = f(x, u) en
x = f(x,−Kx) = f(x) .
L’analyse du systeme au premier ordre de la dynamique resultante s’ecrit
x =∂f
∂x
∣
∣
∣
∣
x=0
x =
(
∂f
∂x
∣
∣
∣
∣
x=0,u=0
+∂f
∂u
∣
∣
∣
∣
x=0,u=0
du
dx
)
x = (A−BK)x
Lorsque la paire A et B est commandable, il est possible d’assigner les polesdu systeme en boucle fermee de maniere arbitraire en utilisant le vecteur degains K (en utilisant la formule d’Ackermann par exemple).

7.1 Linearisation locale et stabilisation 193
En consequence, ∀Q > 0, ∃P > 0 tel que l’equation de Lyapunov dusysteme lineaire transforme soit verifiee :
P (A−BK) + (A−BK)TP = −Q.
La candidat de Lyapunov V (x) = xTPx devient une fontion de Lyapunovvalable localement.
7.1.1 Exemple
Un exemple permettra d’illustrer la methode precedente. Il s’agit d’unsimple robot a un degre de liberte avec un actioneur pour la coordonnee libre.Ce systeme est represente a la figure 7.1.
θ
τ
Fig. 7.1. Pendule avec actuateur
Ce systeme est ”presque” lineaire. Par exemple, il le serait s’il etait place al’horizontale de telle sorte que l’axe de rotation se confonde avec l’axe vertical,supprimant de la sorte l’action de la gravite sur le pendule. Par contre, lorsqu’ilest place verticalement, l’axe de rotation devenant un axe horizontal, la graviteagit sur la barre. Comme le centre de gravite n’est pas situe sur l’axe derotation, un couple en resulte, lorsque la barre quitte la position d’alignementvertical. L’influence de la gravite n’est pas homogene avec l’ecart provoquepar rapport a ce point d’equilbre. La dependance fait apparaıtre une fonctiontrigonometrique.
Ce systeme a fait l’objet d’une breve presentation dans le chapitre intro-ductif ou il a ete question de la presence de deux points d’equilibre isoles. Cesimple fait, aurait pu nous indiquer la presence de non-linearite. En conclu-sion, la dependance gravifique en raison trigonometrique donne naissance ades equilibres mulitples comme le calcul le confirme.
Nous commencerons par etablir les equations du systeme dynamique puisnous obtiendront les matrices A et B associees a la linearisation locale, apartir desquels une synthese de retour d’etat sera effectuee.

194 7 Commande par linearisation
Formulation des equations dynamiques
Pour formuler les equations dynamiques, il est imperatif de determinerles coordonnees des centres de masses de tous les corps pouvant se deplacerpar rapport aux autres. Dans cet exemple trivial, seul le centre de massede la barre mobile doit etre etudie. Ses coordonnees xc et yc repondent auxequations,
xc = lc cos θ
yc = lc sin θ
La methode de la mecanique analytique lagrangienne est utiilisee pouretablir les equations. L’energie cinetique et potentielle s’ecrivent :
Ec =1
2mx2
c +1
2my2
c =1
2ml2c θ
2
Ep = mgyc = mglc sin θ
En appliquant la methode de Lagrange, le Lagrangien s’ecrit L = Ec−Epet la dynamique
d
dt
(
∂L
∂θ
)
− ∂L
∂θ= τ,
l’equation suivante est obtenue :
ml2c θ +mglc cos θ = τ.
Ici, τ = u joue le role d’entree du systeme. Le probleme qui est pose estalors de stabiliser l’ensemble, de telle sorte que le pendule fasse un angle δfixe. Une representation d’etat peut etre obtenue en chosissant x1 = θ − δ etx2 = θ :
x1 = x2
x2 = − g
lccos(x1 + δ) +
1
ml2cτ
A l’equilibre x1 = 0, τ = τ0 = mglc cos(δ). En linearisant, la matrice Aest egalement obtenue :
A =
(
0 1glc
sin(δ) 0
)
; B =
(
01ml2c
)

7.2 Linearisation exacte 195
La loi de commande comportera alors un terme constant (a priori) afin demaintenir le bras dans sa position d’equilibre en l’absence de perturbation,et deux gains constant, un pour chacun des deux etats x1 et x2. On obtientalors,
τ = τ0 − k1x1 − k2x2.
7.2 Linearisation exacte
La methode de linearisation exposee a la section precedente n’est valableque localement. C’est uniquement autour de la valeur nominale, ou est effectuele developpement de Taylor de la fonction f(x, u), que l’approximation donnede bons resultats. Lors de grands ecarts, les termes d’ordre eleves l’emportentsur les premiers termes du developpement, et l’approximation est alors souventinutile.
Neanmoins, il est possible de changer de point nominal du developpement,afin de constituer un nouveau systeme lineaire local. Avec un peu de chance,ce nouveau systeme permet de caracteriser le comportement, mais aucunegarantie n’est alors possible.
Il existe toutefois d’autres approches pour ameliorer la taille de la validitede la linearisation. Elles reposent toutes plus ou moins sur l’idee de changerla representation du systeme initial pour corriger l’effet nefaste des termesd’ordre superieur. Ceci est effectue, soit en les corrigeant directement par lacommande, soit en changeant de coordonnees de telle sorte qu’ils n’apparaisentplus dans le developement selon ces nouvelles coordonnees.
La possibilite d’implanter une loi de retroaction arbitraire permet de trans-former le systeme initial en un nouveau systeme avec de meilleures proprietes.De plus, le choix des coordonnees pour representer l’etat du systeme per-met egalement de simplifier les equations. Par exemple, dans le cas purementgeometrique d’une sphere, l’utilisation de coordonnees spheriques (angles delatitude de de longitude) est mieux adapte que les coordonnees cartesiennestridimensionnelles.
Nous presenteront, sans recours pour l’instant aux formules associees, lesconcepts qui seront approfondis dans les sections suivantes.
Changement de coordonnees
Dans les ouvrages de mecanique theorique (mecanique analytique parexemple), l’utilisation d’un systeme de coordonnees plutot qu’un autre, per-met de simplifier grandement l’expression des equations dynamiques.
Par exemple, dans le formalisme Hamiltonien, les transformations de Le-gendre (transformation qui implique non seulement les coordonnees, maisegalement les moments generalises) sont tres utiles pour obtenir des constantesdu mouvement, et donc integrer le systeme mecanique.

196 7 Commande par linearisation
Dans notre cas, nous sommes en presence d’une representation d’etat. Lastructure des equations ne decoule pas necessairement de l’existence de fonc-tions particulieres comme le lagrangien ou l’hamiltonien. Toutefois, un change-ment d’etat peut neanmoins etre benefique. Seule la structure mathematiquedes equations peut etre exploitee afin de trouver de bons choix de coordonnees.
Changement de l’entree (retour d’etat)
Par l’entremise d’un bouclage supplementaire, definissant une nouvelleentree, les caracteristiques du systemes sont modifiees.
Pour mieux comprendre le phenomene, il suffit de prendre l’exemple dureglage en cascade. Un premier bouclage permet d’assurer le suivi d’uneconsigne pour une grandeur de sortie determinee. Ce bouclage definit completementl’entree initiale du systeme a commander. Cependant, si l’on interprete laconsigne en question comme une nouvelle entree, le systeme comporte main-tenant, a la fois le systeme initial, mais egalement le bouclage, et le compor-tement du systeme est donc bien modifie.
Toute la difficulte revient a trouver un bouclage adequat qui garantisse lesbonnes proprietes du systeme transforme.
Linearisation entree-etat
C’est la linearisation de l’etat dans son ensemble. Cette technique utilisea la fois un changement de coordonnees et un bouclage.
Linearisation entree-sortie
Contrairement au cas precedent, cette technique ne linearise que le com-portement entree-sortie. Nous verrons que ceci a comme consequence de ga-rantir un comportement lineaire d’une partie seulement de l’espace d’etat.Le systeme devra posseder de bonnes proprietes afin que la partie restante del’etat ne devienne pas instable lorsque la linearite est imposee sur la sous-partide l’etat correspondante. Cette technique utilise principalement qu’un bou-clage. Cependant le changement de coordonnee est souvent utilise egalementpour mettre le systeme sous la forme normale, representant une forme cano-nique du systeme.
La linearisation est globale
C’est principalement le gain des methodes qui seront presentees par rap-port a la technique de la premiere approximation presentee plus haut.
Nous examinerons essentiellement les systemes comportant une seuleentree. Les techniques presentees peuvent toutefois etre etendues relativementfacilement au cas d’entrees multiples qui offre egalement quelques possibilites

7.3 Equation d’erreur 197
supplementaires, notamment dans la possibilite d’utiliser une extension dy-namique pour surmonter d’eventuels bloquages. Le lecteur interesse pourraconsulter les ouvrages cites en reference a la fin du Livre pour un traitementde ces sujets.
Avant de proceder avec l’exposition de ces sujets, nous reprenons l’exempledu pendule simple avec un seul actuateur. La representation d’etat
x1 = x2
x2 = − g
lccosx1 −
1
ml2cτ
indique que la premiere equation est parfaitement lineaire. La second parcontre montre la presence de l’influence de la gravite de manieres trigo-nometrique. Par ailleurs, l’entree apparaıt sur cette meme equation.
Ainsi, nous constatons que la representation semble ne pas necessiter demodification, etant donner qu’une partie est deja sous forme lineaire et quela partie non lineaire semble pouvoir etre compensee par l’entree seulement.En effet, en choisissant un bouclage adequat, le changement d’entree v → τ :τ = α(x) + β(x)v, transforme le systeme intial en un systeme lineaire (vu dela nouvelle entree) equivalent.
τ = ml2c
[
v +g
lccosx1
]
,
α(x) = mglc cosx1, β(x) = ml2c
on linearise le systeme : A =
(
0 10 0
)
, b =
(
01
)
,
x = Ax+ bv.
Quoique cet exemple soit simplisite, il illustre parfaitement le gain entreune approche de type purement locale et une approche de nature globale.
7.3 Equation d’erreur
La presente section sert a introduire le concept fondamental pour la com-mande par linearisation, que cela soit a des fins de stabilisation de pointd’equilibre, ou de stabilisation en poursuite ; c’est l’equation d’erreur.
La section suivante examine la signification de cette equation dans lecontexte de fonction. Ensuite, le cas des equations differentielles est considere.

198 7 Commande par linearisation
7.3.1 Fonction
Dans le cas de fonctions, il y a evidemment absence de comportementdynamique.
Obtenir les zeros d’une fonction scalaire de R dans R notee f(x) consistea rendre nulle l’erreur e = f(x) en determinant les valeurs particulieres de x.
Lorsque la fonction consideree fait correspondre plusieurs grandeurs sca-laires distinctes de l’ensemble de depart, pour fournir plusieurs valeurs sca-laires distinctes, disons f(x) : Rn → Rm, trouver des zeros de la fonc-tion revient a trouver des ensembles de nombres reels x1, x2, . . ., xn quiannulent simultanement toutes les composantes de la fonction f , disonsf1(x1, x2, . . . , xn) = 0, f2(x1, x2, . . . xn) = 0, . . ., fm(x1, x2, . . . , xn) = 0.
Maintenant, lorsqu’au lieu de considerer les zeros de la fonction, on ai-merait forcer la fonction a prendre une valeur particuliere, il est possible deconsiderer la fonction modifiee e = f − f , ou f designe la valeur desiree.On retrouve une equation d’erreur, et la reponse au probleme pose revient achercher les valeurs de x qui annulent cette nouvelle equation d’erreur.
En consequence, chercher les zeros d’une fonction ou bien les valeurs del’ensemble de depart qui force la fonction a prendre une valeur particuliererevient en quelque sorte a une tache analogue. Il s’agit de trouver les zerosd’une equation d’erreur.
7.3.2 Equation differentielle
Si le comportement dynamique doit etre pris en compte, la fonction f cedela place a une equation differentielle
x = f(x, u),
il n’est plus possible de forcer instantanement x a zero, lorsque cette variableest initialement differente de zero. Le cas le plus elementaire est une equationlineaire a une seule variable, sans entree. Par exemple, avec x ∈ R,
x = −3x. (7.1)
Comme cette equation est depourvue d’entree, elle ne peut donc pas etreinfluencee de quelque maniere que ce soit. Par contre, on peut facilementtrouver sa solution analytique
x(t) = x0e−3t.
Etant donne que x(t) → 0 lorsque t → 0, la solution converge asymptotique-ment vers la valeur nulle desiree. La vitesse de convergence est determinee parla valeur absolue du nombre devant la variable du temps dans l’exponentiel,c.-a-d. 3.

7.3 Equation d’erreur 199
Dans le cas ou le signe est change devant ce facteur, de telle sorte quel’equation differentielle s’ecrive x = 3x, la solution x(t) = x0e
3t diverge. Il n’ya alors pas moyen de changer ce comportement.
Par contre, des qu’une entree est a disposition, il est possible de modifierles solutions de l’equation differentielle, en corrigeant la valeur de l’entree enfonction de l’etat. Par exemple, bien que
x = 3x+ u (7.2)
diverge lorsque l’entree est forcee a zero,
u = −4x
transforme l’equation originale (7.2) en une equation differentielle conver-gente, x = −x, puisque la solution a cette derniere est x0e
−t.
Stabilisation a une valeur constante
L’exemple precedent (7.2) peut etre egalement interprete a l’aide de lavariable d’erreur
e = 0 − x (7.3)
La variable d’erreur est ainsi definie afin d’indiquer que nous voulons for-cer le systeme a converger vers la valeur nulle. En differentiant (7.3), et enintroduisant (7.2), une nouvelle equation differentielle est obtenue :
e = 3e− u. (7.4)
En posant u = +4e, cette equation est transformee en
e = −e, (7.5)
qui est egalement une equation differentielle dont la solution converge expo-nentiellement vers la valeur nulle desiree.
Il est interessant de noter que, dans ce cas, la manipulation d’introduire lavariable d’erreur est purement formelle, et ne change pas du tout le resultatfinal, car u = +4e = −4x comme precedemment.
Poursuite
L’avantage d’introduire la variable d’erreur est la possibilite de traiter, a lafois la stabilisation vers une valeur constante, et la poursuite d’une trajectoirepredefinie.
Nous avons vu que, dans le cas de fonctions, il suffisait de changer lavariable d’erreur de e = 0 − f en e = f − f pour traiter de la meme maniere,

200 7 Commande par linearisation
la recherche de zeros de la fonction, et celle des valeurs qui forcent la fonctiona prendre une valeur desiree f .
En quelque sorte, cette technique s’etend sans difficulte au contexte desequations differentielles. Il suffit de determiner la quantite a ajouter a l’opposede la variable que l’on desire commander pour constituer la variable d’erreur.
Par consequent, nous considerons d’abord le probleme de specifier le com-portement desire en poursuite.
Specification du comportement desire
Nous avons vu que l’evolution (solution) de l’equation differentielle peutetre modifiee en changeant convenablement la valeur de l’entree.
Il est possible egalement de specifier l’evolution temporelle de la variablea commander.
Par exemple, si l’origine doit etre atteinte en un temps fini, il est possible deconsiderer une evolution sous forme d’un polynome de la variable temporelle.
Dans le cas de l’equation (7.2) , le transfert de l’etat initial x0 a t = 0 versl’origine xT = 0, en un temps arbitraire T choisi prealablement, en suivantun segment de droite, est obtenu en posant xc(t) = at+ b et en determinanta, b ∈ R de telle sorte que la condition intiale xc(0) = x0 et la conditionterminale xc(T ) = 0 soient satisfaites.
On obtient sans peine xc(0) = x0 = a0 + b = b. De meme, aT + b = 0 =aT +x0, a = −x0
T ; et l’on determine le signal de reference, aussi appele signalde consigne, resultant :
xc(t) = −x0
Tt+ x0 (7.6)
Commande en boucle ouverte
Lorsque les conditions initiales sont parfaitement connues, et en absence deperturbation (c.-a-d. lorsque, a la fois l’equation differentielle, et la valeur del’etat, demeurent non modifiees par des facteurs exterieurs de telle sorte que lavariable a commander suit exactement la solution de l’equation differentiellede depart), il est possible de determiner l’entree u a appliquer pour effectuerle transfert de x0 a 0 en un temps arbitraire T (pour autant que le systemesoit commandable ; nous examinerons ceci plus en detail ulterieurement).
Dans notre exemple precedent, il suffit de remplacer x par xc dansl’equation differentielle de depart (7.2), c.-a-d. xc = 4xc + u, de telle sorteque −x0
T = 4(−x0
T t+ x0) + u, autrement dit
u =x0
T(4t− 1) + 4x0 (7.7)
Ceci signifie qu’il est possible de calculer, a priori, la commande pourdeplacer, en suivant un segment de droite, le systeme d’une valeur initiale

7.3 Equation d’erreur 201
donnee vers une valeur predeterminee desiree, en un temps lui-aussi determineet arbitrairement court.
Ceci conduit naturellement a obtenir une suite continue de valeurs del’entree qui garantit la transition.
Il est important d’insister sur la nature de la commande obtenue. Unefois la decision prise d’appliquer la sequence continue mentionnee plus haut,et donnee par la fonction temporelle (7.7), il n’y a plus d’effet de la sortieeffective du systeme (la variable x) sur le choix de l’entree u. Tout s’opere enquelque sorte en aveugle, et c’est seulement apres le temps T qu’une nouvelletransition, ou correction est possible.
Ainsi, lors d’une modification du comportement, comme par exemple unemodification instantanee de la variable x durant l’interval ]0;T [, suite a uneperturbation par exemple, il n’y a pas moyen, pour le moment, d’instan-tanement prendre en compte ce phenomene en corrigeant la commande ap-pliquee au systeme.
Commande en boucle fermee
Toutefois, il est possible d’envisager une methode pour corriger l’apparitionde la derive causee par une brusque reinitialisation de la varible x a un instantinopine et inconnu.
A nouveau, le concept de variable d’erreur est introduit, toutefois aveccomme difference essentielle que l’erreur est constituee entre la consigneprecedemment obtenue et la variable a commander ; ainsi e = xc − x.
En derivant cette erreur, et en tenant compte a la fois de la dynamique etde la consigne, nous obtenons
e = xc − x = xc − 3x− u = xc − 3(xc − e) − u (7.8)
Pour stabiliser l’erreur, il faut forcer une equation differentielle stable. Parexemple, en choisissant e = −e, la commande
uxc − 4(xc − x)
est obtenue. Une methode systematique pour ce type de synthese est presenteedans la prochanine section.
7.3.3 Placement de poles et equation d’erreur
L’equation differentielle d’erreur (7.5) est tres simple, etant donne qu’ellene comporte qu’une seule derivee (1er ordre). N’importe quel autre nombrenegatif que −1 devant e au membre de droite conduirait a une convergenceasymptotique vers la valeur nulle de la solution. Lorsque l’ordre de l’equationest superieur a un, les choses ne sont pas aussi simples.

202 7 Commande par linearisation
Dans le cas d’une equation differentielle lineaire d’erreur d’ordre superieura un, l’erreur, ainsi qu’un certains nombre fini des derivees temporelles de cetteerreur, appraissent avec des coefficients qui sont determines de telle sorte quela solution converge exponentiellement vers zero.
Comme l’equation est supposee etre lineaire, la solution est une somme designaux exponentiels dont les coefficients sont choisis en fonction des taux dedecroissance desires.
La methode est la suivante. On choisit un nombre de nombres complexes(les poles a placer) correspondant a l’ordre de l’equation differentielle d’erreurque nous voulons constituer, disons m.
On a ainsi s1, s2, . . ., sm les m poles complexes qui sont alors choisis avecune partie reelle negative. Plus cette derniere est grande, plus rapide sera laconvergence.
On constitue le polynome en s ayant ces poles comme zeros, c.-a-d.
E(s) = (s− s1)(s− s2) . . . (s− sm)
= sm + a1sm−1 + . . . am−1s+ am
En remplacant la variable s par l’operateur de derivation ddt et en appli-
quant l’operateur E( ddt ) associe au polynome E(s) a la variable temporelle
d’erreur e(t), on aboutit a l’equation differentielle d’erreur E( ddt )e(t) = 0,autrement dit
E(d
dt)e(t) = e(m) + a1e
(m−1) + . . .+ am−2e+ am−1e+ ame = 0 (7.9)
7.4 Systemes lineaires SISO
Nous considerons dans cette section le cas de systemes lineaires ayant uneseule entree. Nous pouvons le representer a l’aide de la representation d’etat,
x = Ax+Bu. (7.10)
7.4.1 Sortie specifiee
Dans la plupart des cas, l’etat n’est qu’une representation interne dusysteme, et la tache du regulateur est de garantir principalement un com-portement de sortie.
Bien entendu, il est alors imperatif que les etats internes restent dans desbornes acceptables afin que le dispositif decrit par (7.10) ne court pas de risquede destruction ou d’endomagement.

7.4 Systemes lineaires SISO 203
Ainsi, en plus des equations (7.10), une sortie
y = Cx (7.11)
est egalement donnee. Nous supposerons, sans perte de generalite, que l’entreeu n’influence pas directement la sortie. Ceci etant le cas avec (7.11), le systeme(7.10) indique que l’entree pourrait influencer la derivee temporelle de cettesortie y. En effet,
y = Cx = CAx+ CBu (7.12)
de telle sorte que si CB 6= 0, l’entree u influence directement y. Dans le cascontraire, cette procedure peut etre continuee :
y = CAx = CA2x+ CABu = CA2x
...
y(r−1) = CAr−2x = CAr−1x+ CAr−2Bu = CAr−1x
y(r) = CAr−1x = CArx+ CAr−1Bu (7.13)
avec CAr−1B 6= 0 et CB = 0, CAB = 0, . . ., CAr−2B = 0.
Nous pouvons donc assumer, qu’il existe un nombre entier r 6= 0,
1 ≤ r < n = dim x,
pour lequel y, y, y, . . ., y(r−1) ne sont pas influencees par u.
Seul y(r) subit l’influence directe de l’entree u, et nous pouvons donc definiry(r) comme la nouvelle entree
v = y(r) = CArx+ CAr−1Bu, (7.14)
a partir de laquelle le bouclage
u =1
CAr−1B(v − CArx) , (7.15)
obtenu par simple inversion de l’expression precedente, transforme le systemeinitial (7.12) en une chaıne d’integrateurs
y(r) = v. (7.16)
En posante = yc − y,
et en constituant une equation d’erreur differentielle d’ordre r conformementa la section 7.3.3, nous pouvons garantir une stabilite et une convergence dusysteme (7.16), par le choix des poles.
Il suffit d’exprimer v en fonction de l’equation differentielle d’erreurresultante :

204 7 Commande par linearisation
v = y(r)c + a1e
(r−1) + a2e(r−2) + . . . are (7.17)
= y(r)c + a1(y
(r−1)c − y(r−1)) + a2(y
(r−2)c − y(r−2)) + . . .+ ar(yc − y)
= y(r)c + a1(y
(r−1)c − CAr−1x) + a2(y
(r−2)c − CAr−2x) + . . .+ ar(yc − Cx)
Qu’en est-il du systeme complet ? C’est-a-dire, en considerant (7.12),(7.15), et (7.17) est-ce que l’ensemble de tous les etats se comporte-t-il cor-rectement, a savoir de maniere bornee ?
Il s’agit donc d’etudier les etats internes qui n’apparaissent pas necessairementdans le comportement de la sortie.
Pour l’analyse qui va suivre, nous allons considerer le cas particulier deyc = 0. Ceci garantit de couvrir tous les cas, etant donne que le principe desuperposition est valable en lineaire. Ainsi, sous cette hypothese, lorsque lastabilite interne est demontree pour yc = 0, elle l’est egalement pour un ycquelconque.
La loi de bouclage (7.15) avec (7.17) permet de garantir que y, y, . . ., y(r)
convergent vers leurs valeurs respectives yc, yc, . . ., y(r)c , sans erreur. Dans le
cas particulier d’une consigne nulle (yc = 0), ceci revient a garantir que y etses r derivees convergent vers zero, c’est-a-dire que la partie de l’etat associeeconverge egalement vers zero. Nous avons
0 =
CCACA2
...CAr−1
x =
yyy...
y(r−1)
= 0. (7.18)
En consequence, apres convergence de y, y, . . ., y(r−1) a zero, x est nula un multiple pres du noyau de la matrice d’observabilte tronquee (pour neretenir que les r premieres lignes). Ceci signifie que tout vecteur d’etat dansl’ensemble
X = x |
CCACA2
...CAr−1
x = 0
ne pourra pas influencer la commande v elaboree plus haut, cf. (7.17). Enparticulier, si un tel vecteur d’etat diverge a l’infini, il n’y a aucun moyen pourque le regulateur precedent ne detecte et ne corrige le comportement (puisquey et ces derivees ne sont pas affectes). Nous sommes alors en presence d’uneinstabilite interne. Les etats constituants la trajectoire divergente sont rendusinobservables par le regulateur propose.

7.4 Systemes lineaires SISO 205
Par consequent, les etats rendus inobservables par le bouclage precedentne doivent pas diverger pour que la commande proposee puisse etre applicable.
Pour comprendre ce que cela signifie plus concretement, completons lamatrice d’observabilite tronquee pour constituer une matrice plein rang, c.-a-d. la matrice
Z =
CCA...
CAr−1
γr+1
...γn
(7.19)
de rang n.
Remarque 7.1. Il est important de noter que les r vecteurs lignes C, CA, . . .,CAr−1 sont necessairement independants, car autrement l’entree ne pourraitpas apparaıtre par derivation de la sortie au cours du processus (7.13). Eneffet, le fait de retomber dans l’espace vectoriel courant (celui engendre parla sortie et ces derivees jusqu’a l’ordre en cours) implique que l’on ne pourraplus en sortir. C’est pourquoi il est toujours possible de completer les lignesa l’aide des n− r nouveaux vecteurs independants γr+1, γr+2, . . ., γn.
En inversant la matrice Z et en calculant ZZ−1 = I, on constate que lespremieres r lignes de la matrice Z annulent les n−r dernieres colonnes de l’in-verse Z−1. Nous avons donc ainsi une base de X , c.-a-d. une base des vecteursx qui n’influencent pas l’entree u apres bouclage par (7.15). En changeant decoordonnees par z = Zx, on constate que les premieres composantes z1 = y,z2 = y, . . ., zr = y(r−1) s’annulent (ainsi que leur derivee) et que les variablesinternes sont zr+1, zr+2, . . ., zn.
En prenant la derivee de ces dernieres variables, et en utilisant le fait quev = 0 lorsque y et ces r derivees ont converges, de sorte que
u = − 1
CAr−1BCArx,

206 7 Commande par linearisation
il s’ensuit que
zr+1
zr+2
...zn
=
γr+1
γr+2
...γn
x =
γr+1
γr+2
...γn
(
A− 1
CAr−1BBCAr
)
x
=
γr+1
γr+2
...γn
(
A− 1
CAr−1BBCAr
)
Z−1
(
0r×(n−r)I(n−r)
)
zr+1
zr+2
...zn
= Az
zr+1
zr+2
...zn
. (7.20)
Pour que la loi de commande presentee a ce paragraphe puisse fonctionnersans endommager le systeme a commander, il est necessaire et suffisant quela dynamique interne (7.20) soit bornee.
Ceci signifie deux choses : i) Soit toutes les valeurs propres de la matrice Azont des parties reelles strictement negatives (auquel cas la dynamique internesera asymptotiquement stable) ; ou alors ii) les valeurs propres de Az n’ontpas de partie reelle strictement positive et les blocs de Jordan associes auxvaleurs propres nulles sont separes et de dimension deux au maximum, auquelcas la dynamique interne est oscillatoire mais bornee.
Exemples
Nous allons considerer un modele elementaire d’une table de positionne-ment industrielle a une dimension. L’objet a positionner n’est malheureuse-ment pas rigide ; il possede un mode propre associe a sa flexibilite. Ceci rendla tache de positionnement plus difficile.
Un moteur fournit un couple pur τ a un chariot de masse M , qui n’est pasparfait non plus car, a vide, il presente un mode de resonance correspondant aune flexibilite propre modelisee par une masse m2 et une constante de rigiditek2.
Le chariot supporte un outil qui doit se positionner precisement a sa po-sition d’arrivee quel que soit l’etat initial de la table. L’outil et sa structurepossede une masse m1, et il est relie au chariot par une attache qui n’est pasinfiniment rigide. Elle est modelisee par un ressort pur de constante d’elasticitek1.

7.4 Systemes lineaires SISO 207
L’energie cinetique est donnee par
Ecin =1
2m1x
21 +
1
2m2x
22 +
1
2Mx2
et l’energie potentielle par
Epot =1
2k1(x1 − x)2 +
1
2k2(x2 − x)2
Le lagrangien pour ce systeme est donne par
L = Ecin − Epot
En calculant les equations dynamiques par ddt
(
∂L∂q
)
− ∂L∂q = Fq avec q =
x, x1, x2 et Fx = τ , Fx1= Fx2
= 0, nous obtenons
Mx− k1(x1 − x) − k2(x2 − x) = τ (7.21)
m1x1 + k1(x1 − x) = 0 (7.22)
m2x2 + k2(x2 − x) = 0 (7.23)
Nous allons utiliser la variable x pour designer a la fois le vecteur d’etatet la position du chariot x. Le contexte devrait etre suffisant pour distinguerces deux notions. En cas de confusion possible, une precision explicite seraapportee. Pour simplifier quelque peu les developpement nous prendrons uncas numerique particulier M = 1, k1 = 2, k2 = 3, m1 = 0.5 et m2 = 0.25.
En choisissant l’etat x =(
x x1 x2 x x1 x2
)T, il vient x = Ax+Bu, y = Cx
avec u = τ et
A =
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 1−5 2 3 0 0 04 −4 0 0 0 012 0 −12 0 0 0
B =
000100
C =(
0 1 0 0 0 0)
Pour appliquer la methode presentee, il suffit de deriver cette sortie jusqu’ace que l’entree fasse son apparition.
On calcule facilement
CB = 0, CAB = 0, CA2B = 0, CA3B = −4
de sorte que le systeme peut etre transforme en une chaıne de quatreintegrateurs

208 7 Commande par linearisation
y(4) = v
a l’aide du bouclage (7.15) qui s’exprime comme
u =1
CA3B(v − CA4x) = −4(v −
(
−36 24 12 0 0 0)
x) (7.24)
La chaıne d’integrateur se stabilise facilement en constituant l’equationd’erreur differentielle d’ordre quatre. En posant, d’une part e = yc − y, ou
yc est la position x1 de l’outil desiree, et, d’autre part, yc = yc = y(3)c = 0
(consigne constante), le polynome d’erreur s’ecrit, en choissant les tous lesquatre poles reels et au meme endroit −2, comme
E(s) = (s+ 2)4 = s4 + 8s3 + 24s2 + 32s+ 16,
de telle sorte que l’entree de la chaıne d’integrateurs s’expriment
v = 8(−CA2x) + 24(−CAx) + 32(yc − Cx).
Pour trouver la dynamique interne, on complete dans un premier temps C,CA, CA2 CA3 par deux vecteurs lignes γ5 et γ6 afin de garantir une matricede rang 6. Comme
CCACA2
CA3
=
0 1 0 0 0 00 0 0 0 1 0−4 4 0 0 0 00 0 0 −4 4 0,
(7.25)
on peut fixer
γ5 =(
0 0 1 0 0 0)
γ6 =(
0 0 0 0 0 1)
.
En ne retenant que les deux dernieres colonnes de l’inverse de la matrice(7.19), on trouve sans difficulte la matrice Az a l’aide de (7.20) :
Az =
(
γ5
γ6
)(
A− 1
CA3BCA4
)
Z−1
(
O4×2
I2
)
=
(
0 1−12 0
)
. (7.26)
Etant donne que les valeurs propres de Az sont λ = ±2√
3j, c.-a-d. qu’ellessont distinctes et a partie reelle nulle, la dynamique associee aux deux etatsinternes z5 = γ5x = x2 et z6 = γ6x = x2 est oscillante et stable, mais pasasymptotiquement stable. Ainsi, selon les conditions initiales, le systeme serale theatre d’un mouvement oscillant qui demeurera indefiniment, bien que lasortie finisse par etre parfaitement regulee.
Pour comprendre de maniere imagee ce qui se produit, notons que lacommande choisie garantit le controle de x1 par construction. Elle garan-tit egalement le comportement d’une combinaison d’etats supplementaires

7.4 Systemes lineaires SISO 209
determinee par le vecteur CA2, a savoir x1−x. Comme la position x1 converge,la position x converge aussi. Ceci signifie que les deux massesm1 etm finissentpar ne plus bouger.
Toutefois, le regulateur laisse un degre de liberte dans le systeme, au sensou la position x2 n’est pas contrainte puisque cet etat est γ5x. Le regulateurne fait que compenser l’influence de la masse m2 sur les deux autres, sanspour autant eliminer l’energie associee a cette masse.
C’est la commande u qui fournit le couple necessaire pour compenser exac-tement l’influence de la masse m2 sur le systeme complet, de telle sorte quela convergence des deux autres positions x1 et x n’en est pas affectee. (A tra-vers le terme − 1
CA3BCA4x = 4
(
−36 24 12 0 0 0)
x dans l’expression (7.24).)Ainsi, si la masse m2 ne part pas au repos, la loi de commande implantee nechangera pas le comportement de la position x2. Celle-ci oscillera indefiniment,bien que les deux autres masses finissent par s’arreter.
Du point de vue de la sortie specifiee, tout se passe tres bien etant donnequ’elle converge vers le poins desire selon la dynamique imposee. La seulequestion est de savoir si l’oscillation en x2 est tolerable d’un point de vuepratique. Ceci dependra alors du contexte dans lequel la machine devra operer.
Systeme lineaire 1
L’exemple precedent a montre que la dynamique interne resultante doitetre prise au serieux et analysee avec soin. En effet, il se pourrait que les etatsassocies finissent par diverger.
Dans le present paragraphe et dans le suivant, deux exemples sont presentesafin de caracteriser quelque peu la propriete responsable de l’instabilite de ladynamique interne. Ils different l’un de l’autre uniquement par un changementde signe. De plus, en ne comportant que deux etats, ils sont choisis avec unestructure la plus simple possible.
Soit le premier systeme donne par les equations
(
x1
x2
)
=
(
+x2 + uu
)
y = x1.
On procede comme precedemment en derivant simplement la sortie jusqu’ace que l’entree influence une des derivees. En l’occurance, la premiere deriveefait apparaıtre l’entree
y = x2 + u = v.
Le systeme equivalent est un integrateur unique. Nous choisissons, sans pertede generalite, le pole en −1, et ainsi v = yc + (yc − y), ce qui conduit a
u = −x2 + yc − (y − yd).

210 7 Commande par linearisation
Il reste a determiner la dynamique interne et son comportement. Commele systeme est lineaire, yc = 0 est considere. Asymptotiquement, y = 0, y = 0,ce qui conduit a ce que x1 = 0 et x1 = x2 + u = 0. Par consequent,
u = −x2
et la dynamique interne devient
x2 = −x2,
qui est asymptotiqement stable puisque sa solution est x2 = x20e−t.
Systeme lineaire 2
Le deuxieme systeme differe du premier (7.27) uniquement par le signedevant x2 dans la premiere equation, c.-a-d.
(
x1
x2
)
=
(
−x2 + uu
)
y = x1
En procedant de maniere similaire au cas precedent, y = −x2 + u, u = x2 +yd − (y − yd), ce qui engendre
e+ e = 0
x2 − x2 = yc − e
et la dynamique interne x2 = x2 est instable puisque sa solution x2 = x20et
diverge a l’infini.
Comparaison
Les deux precedents exemples permettent d’elaborer une conjecture surla structure de la fonction de transfert G(s) de la representation d’etat. Encalculant les fonctions de transfert associee
G1(s) =s+ 1
s2
G2(s) =s− 1
s2,
on constate que le changement de signe sur x2 de cette representation a in-fluence seulement le numerateur des fonctions de transfert G1(s) et G2(s).C’est la position du zero unique qui se situe dans un cas dans le demi plan droitdu plan complexe (dynamique interne instable) et dans le demi-plan gauche(dynamique interne stable). De plus la difference de degre du polynome dudenominateur par rapport au polynome du numerateur correspond a la lon-gueur de la chaine d’integrateurs entre l’entree v et la sortie y.

7.4 Systemes lineaires SISO 211
Dynamique interne et position des zeros
z = Az + bu y = cT z
y = cT (sI −A)−1bu =b0 + b1s
a0 + a1s+ a2s2 + s3u
x1 =1
a0 + a1s+ a2s2 + s3u
x2 = x1
x3 = x2
d
dt
x1
x2
x3
=
0 1 00 0 1
−a0 −a1 −a2
x1
x2
x3
+
001
u
y =(
b0 b1 0)
x1
x2
x3
y = b0x2 + b1x3
y = b0x2 + b1x3 = b0x3 + b1(−a0x1 − a1x2 − a2x3+u)
u = (a0x1 + a1x2 + a2x3 −b0b1x3
) +1
b1(−k1e− k2e+ yd)
0 = e+ k2e+ k1e
x1 = x2
x1 =1
b1(y − b0x1)
→ x1 + b0b1x1 = 1
b1y
y = e+ yd est borne,
stabilite → ℜe(
− b0b1
)
< 0
Pour que la dynamique interne soit asymtotiquement stable il faut quetous les zeros soient a partie reelle strictement negative.

212 7 Commande par linearisation
7.4.2 Sortie non specifiee, formule d’Ackermann
La presence d’une dynamique interne pouvant etre instable est la principalelimite de la technique de derivation successive. De plus, meme lorsque celle-ciest stable, sa vitesse de convergence ne peut pas etre modifiee.
Cette dynamique interne apparaıt a cause de l’influence trop rapide del’entree sur la sortie, au sens ou cette entree influence la derivee d’ordre r. Ladynamique interne est alors de dimension n− r.
On peut alors s’interroger sur la possibilite de choisir une sortie construitede telle sorte que l’entree influence une derivee superieure a r. Etant donneque le systeme est de taille n, la plus haute derivee possible est alors r = n.
Avec un tel choix de sortie, la dynamique interne disparaıt et le systemedevient equivalent a une chaıne d’integrateurs
v = y(n).
En consequence, la sortie y est parametree par n coefficients a determiner,c1, c2, . . ., cn, ci ∈ R, i = 1, . . . , n, de telle sorte qu’en definissant
y = Cx =(
c1 c2 . . . cn)
x (7.27)
l’equation
C(
B AB A2B . . . An−2B)
= 0 (7.28)
doit etre respectee. Ceci decoule d’une application directe du processus (7.13)de la section precedente particularisee pour r = n. Neanmoins, nous devonsen plus garantir que l’entree u affecte bien la n-ieme derivee, car sinon il n’yaurait pas moyen de diriger le systeme. C’est ainsi que
CAn−1 B 6= 0. (7.29)
Afin de determiner le vecteur C, formons la matrice de commandabilite
C =(
B AB A2B . . . An−1B)
. (7.30)
Les conditions (7.28) et (7.29) signifient qu’un choix de vecteur C corres-pond a la derniere ligne de la matrice inverse de C :
C = eTnC−1, (7.31)
ou eTn =(
0 0 . . . 0 1)
.
Tout autre multiple de C conviendrait egalement parfaitement. Une tellesortie y = Cx est appelee sortie de Brunovsky dans le cas lineaire ou sortieplate dans le cas general. Comme C−1C = I,
CAn−1B = 1. (7.32)

7.4 Systemes lineaires SISO 213
Pour determiner le bouclage stabilisant, on prend a nouveau une equationdifferentielle ordinaire stable mais cette fois-ci d’ordre n,
E(s) = sn + a1sn−1 + . . .+ an
dont tous les zeros sont a partie reelle negative. Conformement au developpementprecedent, ceci conduit au bouclage
u =1
CAn−1B(v − CAnx) (7.33)
v = ytc +
n∑
i=1
ai(y(n−i)c − CAn−ix) (7.34)
constitue par (7.15), (7.17) et particularise pour r = n. En remarquant queE(s) = sn +
∑ni=1 ais
n−1 est le polynome caracteristique desire de la bouclefermee, les deux equations (7.33) et (7.34) n’en forme qu’une qui n’est riend’autre que la formule d’Ackermann lorsqu’on prend en compte (7.32) :
u = −enC−1E(A)x. (7.35)
(Nous avons pris pour simplifier yc = 0, . . . yc = . . . ,= ync = 0, a nouveau sansperte de generalite.)
Finalement, la seule condition pour que cette construction soit valable estque le systeme soit commandable, c’est-a-dire que la matrice matrice C soitinversible. La dynamique interne est absente et tout l’etat est sous controle.La sortie y = Cx ainsi que ses derivees convergent vers les valeurs de referencecorrespondantes.
Exemple
Nous reprenons l’exemple de la table rudimentaire. En elaborant la matricede commandabilite
C =
0 1 0 −5 0 730 0 0 4 0 −360 0 0 12 0 −2041 0 −5 0 73 00 0 4 0 −36 00 0 12 0 −204 0
(7.36)
et en ne retenant que la derniere ligne de l’inverse de celle-ci, la sortie deBrunovsky est obtenue
y = eTnC−1 =(
0 132 − 1
96 0 0 0)
. (7.37)

214 7 Commande par linearisation
Bien que la sortie dont le comportement desire est la position x1, com-mander directement celle-ci par la methode des derivees successives conduita une dynamique oscillante interne.
Par contre, en choisissant une combinaison entre x1 et x2 conformement a(7.37), il est alors possible de completement s’affranchir de la presence d’unedynamique interne. Le prix est la necessite de mesurer cette position.
Toutefois, meme lorsque la position donnee par (7.37) n’est pas mesurable,le fait que cette combinaison retarde l’apparition de l’entree suffisament pourque tous les etats soient sous l’influence de la trajectoire de cette sortie, ilest possible d’utiliser cette combinaison d’etat pour planifier le mouvement ettrouver une commande a priori permettant de transferer le systeme d’un etatinitial vers un etat terminal. Cette technique sera presentee dans le contextenon lineaire d’ici peu, car les deux techniques que l’on vient de presenteradmettent une generalisation.
7.5 Linearisation entree-sortie
La generalisation de la derivation de la sortie specifiee au cas non lineaireest ce que nous appelerons la linearisation entree-sortie. Nous commenceronspar un exemple introductif.
x1 = sinx2 + (x2 + 1)x3
x2 = x51 + x3
x3 = x21 + u
y = x1
La sortie etant specifiee, nous allons simplement la deriver successivementjusqu’a l’apparition de l’entree u. Ceci engendre
y = x1 = sinx2 + (x2 + 1)x3
y = cosx2x2 + x2x3 + (x2 + 1)x3
= (cosx2 + x3)(x51 + x3) + (x2 + 1)(x2
1 + u)
Ainsi, l’apparition de l’entree apres la deuxieme derivation arrete le processus.Cette entree permet neanmoins d’imposer y, variable que l’on peut considerercomme une nouvelle entree v.
v = (cosx2 + x3)(x51 + x3) + (x2 + 1)(x2
1 + u) (7.38)
Il faut toutefois etre prudent et garantir que l’on peut effectivement modifierv = y en manipulant u. En resolvant (7.38) pour u, un denominateur x2 + 1fait son apparition :

7.5 Linearisation entree-sortie 215
u =1
(x2 + 1)
(
v − (cos x2 + x3)(x51 + x3)
)
− x21 (7.39)
Par consequent, l’imposition de y n’est possible que lorsque x2 6= −1.
Il est egalement possible de suivre une trajectoire de sortie yd(t) a conditionde constituer l’erreur e(t) = yd(t)−y(t) et de former une equation differentielled’erreur stable du second ordre. Une fois cette equation determinee, il suffitde la resoudre pour y = v et forcer cette acceleration par l’intermediaire de udonne par (7.39).
Par exemple, l’equation d’erreur
e+ k1e+ k2 = 0 e = yd − y
avec k1 et k2 choisit de telle sorte que les deux racines du polynome ca-racteristique s2 + k1s + k2 = 0 aient chacune une valeur reelle strictementnegative conduit entraıne une poursuite asymptotique de la sortie par l’entre-mise de
v = yd + k1(yd − y) + k2(yd − y).
Cependant, il faut egalement preter attention aux etats caches par la dy-namique entree-sortie. Seul deux combinaisons des etats sont reellement souscontrole, a savoir celle de la sortie y et celle de la derivee de la sortie y.
Le systeme comporte trois etats, et seul deux combinaison sont linearisees.Il demeure un etat cache, masque, rendu inobservable par la relation entreesortie imposee pour lineariser le comportement de sortie.
Pour obtenir l’etat cache, il suffit de considerer les deux combinaisonscommandees y = x1 et y = sinx2 + (x2 + 1)x3 = x1.
Asymptotiquement, y convergera vers yd et par consequent x1 → yd. L’etatx1 est sous controle.
La deuxieme condition y → yd indique que la combinaison de deux etatsx2 et x3 est sous controle. Ainsi, en envisageant soit l’etude du comportementde x2, ou celui de x3, l’evolution cachee du systeme sera alors determinee.
Par exemple, en considerant x2, la deuxieme equation de la dynamiquedonne
x2 = x51 + x3. (7.40)
En ne considerant que le comportement asymptotique, il est possible deremplacer dans l’equation (7.40), x1 par yd(t), et determiner x3 a partir deyd(t) = sin(x2) + (x2 + 1)x3 :
x2 = y5d +
1
x2 + 1(yd − sinx2 ) . (7.41)
Cette equation differentielle est du premier ordre en x2.
Si elle est instable, la loi de commande de linearisation entree-sortie nepourra pas etre appliquee sur le systeme initial.

216 7 Commande par linearisation
Si elle est stable, il n’est pas cependant completement garantit que la loide commande fonctionne. En effet, non seulement la variable x2 ne doit paspasser par −1, mais il faut egalement que le transitoire des etats x1 et x3 n’en-traıne pas une instabilite sur x2. L’equation differentielle (7.41) n’est valableque lorsque x1 = yd et sin(x2) + (x2 + 1)x3 = yd et ces egalites n’ont lieu quede facon asymptotique. Entre les deux, il est possible que des phenomene d’in-stabilite en temps fini fasse leur apparition. Ceux-ci sont causes pas des ecartsimportants par rapport au comportement asymptotique. Nous presenteronsce phenomene au debut du chapitre suivant.
Neanmoins, la stabilite de l’equation differentielle (7.41) garantit que loca-lement autour du comportement asymptotique, la loi de linearisation entree-sortie est applicable.
7.6 Linearisation exacte entree-etat
A la difference de la linearisation entree-sortie, il y a dans le present casabsence d’une sortie specifiee initialement.
En fait, toute la methode revient simplement a trouver une sortie par-ticuliere (appelee sortie plate ou sortie linearisante) qui retarde suffisamentl’apparition de l’entree par derivation successive. Ainsi, la dynamique internedisparaıt apres transformation en une chaıne d’integrateurs associee.
Supposons donc la sortiey = h(x)
comme inconnue, et derivons celle-ci par rapport au temps
y =∂h
∂xx =
∂h
∂x(f(x) + g(x)u) =
∂h
∂xf(x) +
∂h
∂xg(x)u (7.42)
L’equation (7.42) nous apprend qu’il y aura presence de l’influence de l’entreeu lorsque ∂h
∂xg(x) 6= 0.
En utilisant le notion de derivee de Lie presentee dans le chapitre geometrie,on peut ecrire plus succintement la derivee temporelle de la sortie comme
y = Lfh(x) + Lgh(x)u (7.43)
et la condition que l’entree n’influence pas celle-ci est que
Lgh(x) = 0. (7.44)
Si cette condition est satifaite, on peut continuer le processus de derivation,exactement comme dans le cas de la linearisation entree-sortie. On obtient laseconde derivee

7.6 Linearisation exacte entree-etat 217
y =∂Lfh(x)
∂xx =
∂Lfh(x)
∂x(f(x) + g(x)u)
= LfLfh(x) + LgLfh(x)u, (7.45)
et ainsi l’entree u influencera la seconde derivee que lorsque LgLfh(x) 6= 0.
7.6.1 Conditions pour la sortie plate
Si l’on veut reduire la dynamique interne de telle sorte que celle-ci dispa-raisse, il est necessaire et suffisant que l’entree n’apparaisse qu’au dernier mo-ment, c.-a-d. apres un grand nombre de derivees de celle-ci. Pour un systememono-entree de dimension d’etat egal a n, nous avons donc les conditionssuivantes :
Lgh(x) = 0 (7.46)
LgLfh(x) = 0 (7.47)
......
LgLn−2f h(x) = 0 (7.48)
LgLn−1f h(x) 6= 0 (7.49)
Remarquons que la derniere condition LgLn−1f h(x) 6= 0 est indispensable
pour que l’on puisse trouver une expression de l’entree afin de controler lachaıne d’integrateurs que constitue y et ces n−1 derivees. En effet, la dernierederivee s’exprime comme
y(n) = L(n)f h(x) + LgL
(n−1)f h(x)u = v (7.50)
que nous avons egaler a une nouvelle entree v correspondant a l’entree de lachaıne de n integrateurs y(n) = v.
Comme dans le cas de la linearisation entree sortie, le controleur est com-plet lorsqu’une equation d’erreur d’ordre n est specifiee a partir de laquellel’expression de v est exprimee. Finalement, l’entree du systeme d’orgine s’ex-prime comme
u =1
LgL(n−1)f h(x)
(
v − L(n)f h(x))
)
,
ou v stabilise la chaıne d’integrateurs en utilisant l’equation d’erreur.
Bien que les conditions (7.46-7.48) soient les seules que doivent satisfairela fonction h(x), il n’est pas aise de trouver des conditions necessaires etsuffisantes pour l’existence de celle-ci. Nous allons reformuler ces conditionsafin qu’une interpretation geometrique puisse en decouler.

218 7 Commande par linearisation
Dans la partie geometrique, il a ete question de champs de vecteur. Ceux-cicorrespondaient a la donnee d’un vecteur en chacun des points de la variete.Il existe une operation tres utile entre deux champs de vecteurs produisant unnouveau champ de vecteurs. Cette operation rend possible la reformulationplus geometrique de la condition de linearisation exacte entree-etat. Il s’agitdu crochet de Lie entre deux champs de vecteurs.
Definition 7.2. Le crochet de Lie de deux champs de vecteurs f et g corres-pond a un nouveau champ de vecteurs note [f, g] et donne par
[f, g] =∂g
∂xf − ∂f
∂xg,
ou ∂g∂x et ∂f
∂x sont des matrices Jacobiennes.
Une propriete interessante de la derivee de Lie le long du crochet de Lieest qu’elle puisse s’exprimer a partir des derivees de Lie des vecteurs avant lecrochet. Plus precisement.
Proposition 7.3.
L[f,g]h(x) = LfLgh(x) − LgLfh(x) (7.51)
Preuve. Le membre de gauche s’obtient par application de la definition de laderivee de Lie en considerant le champ de vecteur [f, g] = ∂g
∂xf − ∂f∂xg :
L[f,g]h(x) =∂h
∂x
∂g
∂xf − ∂h
∂x
∂f
∂xg (7.52)
Le membre de droite est un peu plus complique, car chaque terme faitapparaıtre une forme quadratique. Nous avons d’une part
LfLgh(x) = Lf (∂h
∂xg) = gT
∂2h
∂x2f +
∂h
∂x
∂g
∂xf, (7.53)
et d’autre part,
LgLfh(x) = Lg(∂h
∂xf) = fT
∂2h
∂x2g +
∂h
∂x
∂f
∂xg, (7.54)
de telle sorte qu’en faisant la soustraction de (7.53) et (7.54) et en tenantcompte de (7.52), nous obtenons bien (7.51) puisque les termes quadratiques(etant identiques) s’annulent.
En revenant aux conditions (7.46-7.48), nous remarquons que nous pou-vons ajouter a la deuxieme, LgLfh(x), n’importe quel multiple de la premiere,Lgh(x), puisque cette derniere est nulle. En outre, ceci signifie qu’il est pos-sible d’ajouter LfLgh(x) puisque cette expression est nulle egalement, suite aLgh(x) = 0. Ainsi,

7.6 Linearisation exacte entree-etat 219
LgLfh(x) = LgLfh(x) − LfLgh(x) = −L[f,g]h(x) = −∂h∂x
[f, g] = 0. (7.55)
En suivant un raisonnement similaire, l’identite
∂h
∂x[f, [f, g]] = 0 (7.56)
est obtenue. Cette idee se generalise, conduisant a la transformation dusysteme (7.46-7.48) en un systeme equivalent
∂h
∂x
(
g [f, g] [f, [f, g]] . . . adn−2f g
)
= 0 (7.57)
L’equation (7.57) entre la 1-forme ∂h∂x et les champs de vecteurs signifie
deux choses :
Premierement, la construction d’un vecteur ligne ∂h∂x est relativement aise
car la matrice(
g [f, g] [f, [f, g]] . . . adn−2f g
)
se calcule de maniere systematiqueen utilisant le crochet de Lie.
Deuxiemement, la possibilite de remonter a partir du vecteur ligne ∂h∂x vers
la fonction h(x) est conditionne par la nature des champs de vecteurs g, [f, g],ad2fg, . . ., ad
n−2f g. La condition est alors celle du theoreme de Frobenius qui
conclut que h(x) existe si, et seulement si, la distribution engendree par ceschamps de vecteurs est involutive.
On aboutit ainsi au theoreme important de ce chapitre
Theoreme 7.4. Un systeme avec une seule entree
x = f(x) + g(x)u
est linearisable entree-etat si, et seulement si, la distribution engendree parg, adfg, . . ., ad
n−1f g est de plein rang et que celle engendree par g, adfg, . . .,
adn−2f g est involutive.
Preuve. La seconde condition permet la construction de la sortie y = h(x),comme explique precedemment. La premiere condition garantit qu’apres lan eme derivee de la sortie, l’entree u influence cette derivee. Le bouclagelinearisant s’obtient, comme dans le cas de la linearisation entree-sortie, enconsiderant la sortie nouvellement construite y = h(x), et en la derivant nfois jusqu’a ce que l’entree apparaisse. En posant y(n) = v et en traitant vcomme la nouvelle entree, l’expression de u en fonction de v est obtenue etle systeme est transforme en une chaıne de n integrateur qui represente lesysteme lineaire equivalent.
Pour aboutir a un schema de commande complet, Il faut encore stabiliserla chaıne d’integrateurs y(n) = v a l’aide de l’entree v. Pour se faire, il est

220 7 Commande par linearisation
possible de constituer une equation d’erreur appropriee, comme dans le casde la linearisation entree-sortie.
Il y a essentiellement deux facons de verifier l’involutivite des champs devecteurs susmentionnes, et chacune repose sur l’une ou l’autre des versions dutheoreme de Frobenius.
La premiere consiste a verifier l’annulation des determinants
det(
g [f, g] . . . adn−2f g [g, [f, g]]
)
= 0
det(
g [f, g] . . . adn−2f g [g, ad2
fg])
= 0
...
det(
g [f, g] . . . adn−2f g [[f, g], ad2
fg])
= 0
det(
g [f, g] . . . adn−2f g [[f, g], ad3
fg])
= 0
...
det(
g [f, g] . . . adn−2f g [adn−1
f g, adn−2f g]]
)
= 0,
(7.58)
La seconde revient a calculer, a l’aide d’un algorithme du type eliminationde Gauss, l’annulateur de la distribution, c.-a-d. ω tel que
ω(
g [f, g] [f, [f, g]] . . . adn−2f g
)
= 0. (7.59)
Notons que l’utilisation de l’algorithme d’elimination ne garantit pas detomber sur une 1-forme exacte ∂h
∂x mais sur une certaine 1-forme ω qui annulel’ensemble des champs de vecteurs mentionnes. Si la distribution est involutivealors la 1-forme ω doit etre integrable et doit donc satisfaire la condition
dω ∧ ω = 0.
7.6.2 Exemple : Robot avec joint flexible
Il s’agit d’un robot dont l’axe prinicipal est muni d’un moteur permettantde fournir un couple τ a un axe de transmission qui le transmet au penduleconstituant la partie mobile principale du robot. Cette transmission n’est pasrigide, mais elle est modelisee par un ressort de torsion de constante de rigiditek. La variable θ2 designe la position angulaire du moteur et la variable θ1represente la position angulaire du pendule. La figure 7.2 illustre le dispositif.
L’energie cinetique contient deux termes, celui du moteur et celui du pen-dule. L’energie potentielle contient un terme d’energie potentielle gravifiquedu au centre de masse du pendule et un terme d’energie potentielle elastiquecontenu dans la transmission flexible.

7.6 Linearisation exacte entree-etat 221
θ1
τ
kθ2
Fig. 7.2. Robot avec joint flexible.
Ec =1
2I1θ
21 +
1
2I2θ
22
Ep =1
2k(θ2 − θ1)
2 +mgl sin θ1
Ainsi le lagrangien s’ecrit
L = Ec − Ep
En choisissant les coordonnees generalisee comme θ1 et θ2, on obtient deuxequations du second ordre
d
dt
(
∂L
∂θ1
)
− ∂L
∂θ1= τ
d
dt
(
∂L
∂θ2
)
− ∂L
∂θ2= 0
a partir desquelles, en introduisant les variables d’etat x1 = θ1, x2 = θ1,x3 = θ2, x4 = θ2, il est possible d’obtenir la representation non lineaire
x1 = x2
x2 = a cosx1 − b(x1 − x3)
x3 = x4
x4 = c(x1 − x3) + du,
avec a = − 1I1mgl, b = k/I1, c = k/I2 et d = 1/I2.
La premiere chose a trouver est l’expression des champs de vecteurs f etg. En considerant les equations precedentes, on obtient facilement
f(x) =
x2
a cosx1 − b(x1 − x3)x4
c(x1 − x3)
g(x) =
000d

222 7 Commande par linearisation
Ensuite, on construit g, [f, g] et [f, [f, g]] = ad2fg et [f, [f, [f, g]]] = ad3
fg.
∂f
∂x=
0 1 0 0−a sinx1 − b 0 b 0
0 0 0 1c 0 −c 0
[f, g] =∂g
∂xf − ∂f
∂xg = −
0 1 0 0−a sinx1 − b 0 b 0
0 0 0 1c 0 −c 0
000d
=
00−d0
[f, [f, g]] = −
0 1 0 0−a sinx1 − b 0 b 0
0 0 0 1c 0 −c 0
00−d0
=
0bd0
−bd
[f, [f, [f, g]]] = −
0 1 0 0−a sinx1 − b 0 b 0
0 0 0 1c 0 −c 0
0bd0
−bd
=
−bd0bd0
De telle sorte que l’on obtient finalement,
(
g [f, g] ad2fg ad
3fg)
=
0 0 0 −bd0 0 bd 0−d 0 0 cdd 0 0 0
(7.60)
Cet ensemble de champ de vecteurs doit etre plein rang au point autour du-quel on aimerait lineariser. En fait, il est important d’insister sur la differenceentre la linearisation locale en un point et la linearisation que nous faisonsici, egalement en tenant compte du point autour duquel cette linearisationest effectuee. On entend par global le fait de tenir compte de toutes les non-linearites, le fait de trouver une domaine le plus grand possible dans lequeltoutes les non-linearites puissent etre compensees. Ce domaine possede uncentre ou l’on evalue les champs de vecteurs. Dans le present cas, le fait queles champs de vecteurs apparaissant dans (7.60) ne dependent pas de l’etat ximplique que le rang est constant dans tout l’espace d’etat. Celui-ci est de 4et signifie que la premiere condition de la linearisation est satisfaite.

7.6 Linearisation exacte entree-etat 223
La seconde condition consiste en la verification de l’involutivite des champsde vecteurs
g, adfg, ad2fg.
Etant donne que tous les vecteurs susmentionnes sont constants, tout cro-chet de Lie entre ces vecteurs constants sont nuls, et la famille est bien invo-lutive.
L’autre approche du theoreme de Frobenius consiste a calculer la 1-formeω telle que
ωg, adfg, ad2fg = 0
On constate facilement que
ω =(
1 0 0 0)
est une solution qui est trivialement integrable puisqu’elle conduit a
h(x) = x1.
Ainsi y = x1 est la sortie linearisante. En consequence, le changement decoordonnees,
Φ1(x) = x1
Φ2(x) = x2
Φ3(x) = a cosx1 − b(x1 − x3)
Φ4(x) = −ax2 sinx1 − b(x2 − x4)
transforme les equations d’etat dans la forme,
z1 = z2
z2 = z3
z3 = z4
z4 = −(a sin z1 + b+ c)z3 − a(z22 − c) cos z1 + bdu
En posant z4 = v, on aboutit au bouclage linearisant transformant lerobot en une chaıne de quatre integrateurs. Nous laissons le soin au lecteur deconstituer l’equation d’erreur pour une telle chaıne d’integrateurs et d’obtenirune expression pour la nouvelle entree v. Ceci conduit alors a un schemacomplet de commande fonde sur la linearisation complete du systeme valableglobalement dans tout l’espace d’etat.

224 7 Commande par linearisation
7.6.3 Exemple : Bille roulant sur une barre
Une bille de rayon ρ et de masse m roule sans glisser sur un barreau. Lebarreau comporte un axe en son milieu, perpendiculaire au deplacement dela bille. Il peut donc s’incliner d’un angle θ permettant ainsi a la bille derouler sous l’effet de la gravite. Un moteur fournit un couple τ afin d’inclinerle barreau. Il n’y a pas de frottement sur la bille (figure 7.3).
θ
r
gτ
Fig. 7.3. Une bille roule sans glisser sur une barre sous l’effet de la gravite. La barreest inclinee d’un angle θ par l’entremise d’un couple τ . La position de la bille estdeterminee par la distance r qu’elle parcourt le long de la barre.
Le centre de masse de la bille est designe par x et y. Il y a deux effetsinertiels dans ce systeme, a savoir la bille elle-meme et la barre. Remarquonsque le bille roule de telle sorte que son moment cinetique est toujours colineairea l’axe de rotation. Il n’y a donc pas de couple gyroscopique provoque par larotation de la bille. La contrainte de roulement sans glissement entraıne labille a se comporter comme une simple masse en translation avec cependantune masse legerement plus lourde due a l’inertie de rotation de la bille.
θ et r sont choisis comme coordonnees generalisees. L’angle de rotation dela bille autour de son axe est donne par r
ρ . La position du centre de masse dela bille par x = r cos θ et y = r sin θ.
L’energie cinetique comporte trois termes, celle de translation de la bille,celle de rotation de la bille, et enfin celle de rotation de la barre. En designantpar I, l’inertie de la bille autour de son centre de masse, et par I, l’inertie dela barre autour de son axe de rotation, l’energie cinetique s’ecrit
Ecin =1
2m(
x2 + y2)
+1
2I
(
r
ρ
)2
+1
2Iθ2
=1
2(m+
1
2ρ2I)r2 +
1
2(I +mr2)θ2 (7.61)

7.6 Linearisation exacte entree-etat 225
et l’energie potentielle
Epot = mgy = mgr sin θ. (7.62)
En consequence, le lagrangien
L = Ecin − Epot (7.63)
entraıne, apres application de la methode de Lagrange, deux equations differentiellesdu second ordre couplees
d
dt
(
∂L
∂r
)
− ∂L
∂r= 0
d
dt
(
∂L
∂θ
)
− ∂L
∂θ= τ.
(7.64)
En effet, une seule force generalisee Fθ est non nulle et correspond au coupleτ impose a la barre. Les deux equations precedentes s’ecrivent explicitementsous la forme
(
m+I
ρ2
)
r −mrθ2 +mg sin θ = 0
(I +mr2)θ +mr(2θr + g cos θ) = τ.
L’introduction des variables d’etats x1 = r, x2 = r, x3 = θ et x4 = θ, conduitalors au modele
x1 = x2 (7.65)
x2 = ax1x24 − b sinx3 (7.66)
x3 = x4 (7.67)
x4 = u (7.68)
ou a = mρ2/(mρ2 + I) > 0, b = mρ2g/(mρ2 + I) > 0 et
u = −2mx1x2x4
I +mx21
− mgx1 cosx3
I +mx21
+τ
I +mx21
. (7.69)
Cette derniere equation (7.69) donne un bouclage preliminaire apres resolutionde τ en fonction de u, rendant ainsi possible l’utilisation de u comme entreedans (7.68) au lieu de τ . Ce bouclage est toujours regulier etant donne que ledenominateur I +mx2
1 ne s’annule jamais.
Pour construire une sortie linearisante h(x), les champs de vecteurs
f(x) =(
x2 ax1x24 − b sinx3 x4 0
)T
g(x) =(
0 0 0 1)T, (7.70)

226 7 Commande par linearisation
obtenus par inspection en se referant a (7.65-7.68), conduisent a
[f, g](x) =(
0 −2ax1x4 −1 0)T
[f, [f, g]](x) =(
2ax1x4 −2ax2x4 − b cosx3 0 0)T. (7.71)
Malheureusement,
[g, [f, g]] =(
0 −2ax1 0 0)T,
ce qui signifie que la deuxieme condition pour la linearisation exacte n’estpas satisfaite car [g, [f, g]] 6∈ span g.[f, g], [f, [f, g]] ; la famille n’est donc pasinvolutive. En effet,
det(
g [f, g] [f, [f, g]] [g, [f, g]])
= −4a2x21x4
est non nul des que la bille quitte le point central r = 0.
On peut alors s’interroger sur la structure de la 1-forme ω qui annule(
g [f, g] [f, [f, g]])
. Comme
(
−2ax2x4 − b cosx3 −2ax1x4 4a2x21x
24 0
) (
g [f, g] [f, [f, g]])
= 0,
la 1-forme ω s’ecrit
ω = (−2ax2x4 − b cosx3)dx1 − (2ax1x4)dx2 + (4a2x21x
24)dx3,
et elle ne provient pas d’une fonction de l’etat h(x), principalement parce-qu’il n’est pas possible de se debarasser du coefficient x4 en multipliant ωpar une fonction (ω n’a pas de coefficient non nul devant dx4). En effet, dωcomporte un monome exterieur avec un facteur dx4 (non nul) alors que ω enest depourvu, de telle sorte que dω ∧ ω 6= 0.
7.7 Commande d’une chaıne d’integrateurs
Les techniques presentees dans ce chapitre ont toutes pour but de trans-former (ou d’etablir une correspondance) entre le systeme ecrit dans les coor-donnees d’origine, en une chaıne d’integrateurs. Cette chaıne doit alors etrecommandee.
En consequence nous avons comme systeme
y(r) = v,
avec y, v ∈ R des grandeurs scalaires. L’objectif est de choisir une succes-sion de valeurs temporelles de v pour atteindre un objectif desire.

7.7 Commande d’une chaıne d’integrateurs 227
Nous considerons essentiellement deux techniques. La premiere est unetechnique de regulation permettant de garantir la stabilite globale de l’origine,et la poursuite d’une reference donnee. Toutefois, elle necessite la mesure dela sortie y et de ces r − 1 derivees temporelle. La seconde, est une techniquede commande en boucle ouverte (a priori) permettant de faire transiter l’etatdu systeme d’une valeur donnee correspondant a une valeur initiale de y etde ces derivees, vers une valeur finale, en un temps fini. Elle ne necessite quela connaissance des conditions initiales.
Une fois l’expression de l’entree de la chaıne d’integrateur ramenee acelle de l’entree du systeme d’origine par les calculs exposes aux sectionsprecedentes, nous avons une technique complete de regulation des r etats as-socies a la sortie y et ses derivees.
7.7.1 Stabilisation et poursuite
Dans le cas ou toutes les derivees de y sont mesurees, nous pouvons forcery a converger vers zero en utilisant une equation d’erreur. En posant
e = yc − y
et en choisissant r poles (valeurs propres) λ1, λ2, . . . λr a valeur propre reelleplus petite que zero, l’equation d’erreur differentielle est constituee, d’abordavec l’operateur de differentiation symbolique s : :
(s+ λ1)(s+ λ2) . . . (s+ λr) = sr + a1sr−1 + . . .+ an−1s+ an (7.72)
Ensuite, en effectuant les derivations correpondant a l’operateur s, on obtientl’equation differentielle associee
e(r) + a1e(r−1) + . . .+ an−1e+ ane = 0.
Finalement, on remplace la plus haute derivee er par v − y(r)c et on trouve
l’expression de l’entree v stabilisante par simple resolution de l’equation ob-tenue.
7.7.2 Transit en temps fini avec commande a priori
L’objectif est de determiner une loi de commande a priori permettantde transferer l’etat de la chaıne d’integrateur, initialement en y(0), y(0), . . .y(r)(0) vers un nouvel etat y(T ), y(T ), . . . y(r)(T ), en un temps fini T .
En pratique, l’etat initial est donne sous la forme x(0) et l’etat terminalsous la forme x(T ) (ou une sous-partie de ces etats). Dans chacun des cas,ces valeurs correspondent a des etats de la chaıne d’integrateur associes a lasortie y et ces derivees. Ainsi, les valeurs d’interpolation sont specifiees pardes valeurs dans les coordonnees de depart.

228 7 Commande par linearisation
Afin d’obtenir la commande mentionnee, il suffit de choisir un polynomed’interpolation d’ordre suffisamment eleve pour representer la trajectoire dela sortie y. L’ordre eleve permet alors de representer l’evolution de l’ensembledes r derivees de la sorties depuis l’instant initial 0 et l’instant final T . Il estnecessaire de choisir un ordre 2r afin de pouvoir specifier a la fois les conditionsinitiales et terminales.
Le polynome s’ecrit sous la forme
yc(t) =
2r−1∑
i=0
piti
ou les coefficients pi ∈ R sont choisis afin de satisfaire le systeme d’equations
yc(0) = y(0) yc(T ) = y(T )
yc(0) = y(0) yc(T ) = y(T )
...
y(r)c (T ) = y(T ) y(r)
c (T ) = y(r)(T ).
Une fois ce polynome choisit, il suffit de deriver celui-ci r fois et d’appliquerl’entree
v = y(r)c (t) 0 ≤ t ≤ T
a la chaıne d’integrateurs.
La technique presentee ne necessite pas de mesure durant la transition.Seules les conditions initiales (ou une sous partie) est necessaire.
L’inconvenient est lie a toute commande en boucle ouverte, au sens ousi le modele n’adhere pas exactement a la realite, une derive par rapport aucomportement desire durant et apres la transition peut alors etre observe. Iln’y a pas de mecanisme de compensation prenant en compte une eventuelleerreur entre le comportement desire et celui reellement observe.
Paradoxalement, cet inconvenient peut egalement devenir un avantagelorsque le systeme est soumis a une classe de perturbation de ces parametresentre le modele de representation utilise pour la commande et celui du systemea commander. Par exemple, un frottement visqueux surmodelise peut etrecompense par retour entraınant la presence d’une boucle a retro-action posi-tive. Ceci est illustre dans l’exercice 7.3.

7.7 Commande d’une chaıne d’integrateurs 229
Exercices
7.1. Bille sur la barre : linearisation entree-sortie. En considerant lemodele dynamique (7.65-7.68) de la bille qui roule sur la barre :
dynamique ! interne dynamique ! zeros
(i) Deriver la sortie y = r = x1 jusqu’a ce que l’entree u apparaisse. Onsuppose que les conditions initiales sont telles que x1(0) 6= 0 et x4(0) 6= 0.
(ii) Calculer la dynamique interne lorsque la position de la bille y =r = x1 est regulee a zero par l’intermediaire de la regulation de la chaıned’integrateurs obtenus sous (i). La dynamique interne comporte comme entreela sortie y ainsi qu’un nombre fini de ses derivees y, . . ., y(p). Elle est constitueepar les etats rendus inobservables par le bouclage regularisant la chaıned’integrateurs obtenus en (i). Est-ce que cette dynamique est globalementstable ? (Traiter y et ses derivees comme des parametres.)
(iii) Calculer la dynamique des zeros. (Il suffit de remplacer y = y =. . . y(p) = 0 dans l’equation de la dynamique interne.) Verifier le type destabilite de cette dynamique.
(iv) Negliger le premier terme ax1x24 de la seconde equation (7.66) pour
le modele de commande, et repeter la meme demarche qu’en (ii). Il s’agitde temporairement negliger le terme dans le modele du systeme utilise poursynthetiser le controleur tout en gardant le terme pour simuler le systeme acommander.
(v) Stabiliser la chaıne d’integrateurs resultante.
(vi) Appliquer le schema de commande obtenu sur le systeme complet(c.-a-d. sans negliger le terme ax1x
24).
(vii) Simuler le systeme complet.
(viii) D’apres vous, est-ce que le systeme est localement asymptotique-ment stable ? Est-il localement exponentiellement stable ? Est-il globalementasymptotiquement stable ?
7.2. Toycopter1. Soit le modele reduit dont le schema de principe estrepresente a la figure 7.4.
(i) Montrer que le lagrangien de ce systeme s’ecrit
L = +1
2Iφφ
2 +1
2Ic sin2 ψφ2 +
1
2Iψψ
2 + Im1 sinψφωm
+1
2Im1ω
2m + Ir1ψωr +
1
2Ir1ω
2r −Gs cosψ
+Gc sinψ. (7.73)
1 Cet exercice est une adapation des papiers de Ph. Mullhaupt, B. Srinivasan, J.Levine, et D. Bonvin A Toy More Difficult to Control Than the Real Thing,Proc. European Control Conference, Brussels, 1997, et Cascade Control of the
Toycopter, Proc. European Control Conference, Karslruhe, 1999.

230 7 Commande par linearisation
ψ
φωr
ωm
Fig. 7.4. Schema du Toycopter avec ces coordonnees. Deux moteurs entraınes desvitesses de rotation des pales variables ωm et ωr permettant au Toycopter de sedeplacer sur une sphere de latitude ψ et de longitude φ.
ou Gc et Gs sont des parametres liees a la position du centre de masse (i.e.verifier egalement la relation de ces parametres a la position reelle du centrede masse). Ic est un parametre inertiel du a la difference d’inertie autour del’axe φ en fonction de la position angulaire ψ. Im1 et Ir1 sont les inerties dessystemes rotors et pales (principal et secondaire respectivement).
(ii) On suppose que les forces aerodynamiques sont proportionnels a lavitesses des helices (en realite elles evoluent en fonction du carre de celles-ci).Les helices sont entraınees par des moteurs a courant continu. Les coefficientsrespectifs sont Cm pour l’helice principale et Cr pour l’helice arriere. L’effet desol est neglige. Il y a egalement du frottement visqueux le long des deux axesφ et ψ (coefficients Cφ et Cψ). Verifier que les forces generalisees s’ecrivent :
Fψ = Cmωm − Cψψ
Fφ = Crωr − Cφφ
Fρm= Kmum − Fmωm
Fρr= Krur − Frωr
(iii) Montrer que la dynamique est donnee par les equations
Iψψ + Irωr = Cmωm − Cψψ
+Gs sinψ +Gc cosψ
+1
2Icφ
2 sin(2ψ) + Imωmφ cosψ (7.74)
(Iφ + Ic sin2(ψ))φ + Imωm sinψ
= Crωr | ωr | sinψ − Cm1ωm | ωm | sinψ
−Icψφ sin(2ψ) − Imωmψ cosψ − Cφφ (7.75)
ωm = vm (7.76)
ωr = vr (7.77)

7.7 Commande d’une chaıne d’integrateurs 231
(iv) En utilisant les sorties y1 = ψ et y2 = φ, deriver celles-ci jusqu’a l’ap-parition des entrees vm et vr. Stabiliser les chaınes d’integrateurs resultantespour atteindre une consigne ψ et φ. Calculer la dynamique interne et verifierla stabilite de celle-ci.
(v) De maniere similaire a l’exercice 7.1, on neglige les termes Irωr etImωm sinψ pour synthetiser la loi de commande tout en les conservant dansle modele pour la simulation. Proceder alors comme en (iv) et simuler lesysteme resultant.
7.3. Considerations de robustesse. Soit un moteur electrique d’equation
θ = −kθ + u
ou la force electromotrice et le frottement visqueux sont represente par laconstante k. Les inerties et autres constantes de couple ont ete normalisee.
(i) Transformer le modele en une chaıne d’integrateurs.
(ii) Synthetiser une loi stabilisant la chaıne d’integrateurs a la positionθ = π
2 . Chosir les gains de telle sorte a stabiliser a 99 % de la consigne apres1 s.
(iii) Choisir une loi de commande en boucle ouverte deplacant la positionangulaire de l’etat initial au repos en θ = 0 vers l’angle final θ = π
2 .
(iv) Repeter les deux techniques precedentes dans le cas k = 1.1k et k =0.9k. k est la valeur du vrai systeme et k celle utilisee pour synthetiser la loide commande. Simuler et discuter les resultats obtenus.
(v) Imaginer une methode qui puisse tenir compte des avantages des deuxmethodes en limitant leurs inconvenients.
7.4. Table de positionnement. On reconsidere la table de positionnementde l’exemple de la section 7.4.1, mais uniquement avec la technique de com-mande en boucle ouverte.
(i) Trouver une parametrisation polynomiale de la sortie plate afin de fairedeplacer la table d’une position d’equilibre vers une autre en 1 s.
(ii) Determiner la commande en boucle ouverte resultante et simuler lesysteme.
(iii) Discuter du transitoire en fonction de la position a atteindre et dutemps de transition.


8
Commande par les methodes de Lyapunov
8.1 Introduction
Dans le chapitre 4, la notion de la stabilite a ete presentee avec des condi-tions permettant de la garantir. Par exemple, une fonction definie positive estassociee au systeme, appelee candidat de Lyapunov. Lorsque la valeur de cettefonction decroit le long des solutions de l’equation differentielle representantle systeme, la stabilite est garantie, et le candidat devient une fonction deLyapunov.
Cette methode de Lyapunov peut etre egalement utilisee pour synthetiserune commande.
Lorsque l’entree u du systeme x = f(x, u) n’est pas specifiee, nous avonsdes degres de liberte supplementaires pour constituer a la fois la fonction V (x)et la loi de commande non lineaire u = k(x). Dans le cas de l’analyse, le choixest plus restreint etant donne que seul V (x) doit etre determine, l’acces al’entree etant absent puisque le systeme s’ecrit x = f(x).
Ce chapitre introduit la conception utilisant la methode de Lyapunov dansle cas particulier d’une synthese en cascade. Une cascade est la reunion dedeux sous-systemes qui s’influencent l’un l’autre. Ainsi en quelque sorte, toutsysteme comportant plus que deux etats est une cascade. Toutefois, nousmettrons l’accent sur les systemes ou une partie de l’etat evolue de maniereindependante par rapport a une autre partie. Cette derniere, par contre, subitl’influence de la premiere, un peu comme une cascade d’eau lorsqu’elle sefragmente en sous-parties, la partie du haut evoluant de maniere independantede celle du bas.
Pour commencer, nous etudions les proprietes de stabilite a la fois localeet globale de la mise en cascade de deux systemes individuellement stables.
Puis nous exploitons la propriete de passivite, qui, comme nous l’avonsdeja vu au chapitre ??, se preserve apres connexion en parallele et en retro-action.

234 8 Commande par les methodes de Lyapunov
Finalement, la methode dite du backstepping est presentee. Une fonctionde Lyapunov est d’abord construite pour un systeme reduit obtenu lorsqueun des etat est considere comme une entree directe. Le systeme est reduit carla derivee de cet etat est momentanement pas prise en compte. A partir de lafonction de Lyapunov associee au systeme reduit, l’influence de la dynamiqueassociee a l’etat manquant est alors pris en compte en augmentant la fonctionde Lyapunov par une erreur quadratique entre la valeur ideale de cet etat et savaleur reelle. En derivant cette nouvelle fonction de Lyapunov et en la forcanta etre negative, on aboutit a une loi de commande pour le systeme complet.Cette methode dite du backstepping permet de construire une fonction deLyapunov de deux variables (une pour chaque partie de la cascade) a partird’une fonction de Lyapunov d’une sous-partie de la cascade.
8.2 Fonction de Lyapunov de Commande
Commencons par considerer un systeme ayant une entree u et dont l’etatx est considere sans distinction de groupe de variables. En toute generalite,le systeme s’ecrit
x = f(x, u). (8.1)
Pour trouver la commande selon la methode de Lyapunov, il s’agit detrouver une fonction definie positive V (x) et une loi de commande u = k(x)de telle sorte qu’en remplacant la loi de commande dans l’expression (8.1),
x = f(x) + g(x)k(x) = f(x),
il soit possible de trouver une fonction de Lyapunov V (x), c.-a-d.,
V (x) > 0 x 6= 0
LfV (x) < 0
Pour trouver V (x), il est possible d’utiliser une des methode decrite dansla partie Analyse de cet ouvrage, comme par exemple la methode de Krasovs-kii ou la methode des gradients variables. Toutefois, une difficulte (ou unefacilite selon le cas) supplementaire apparaıt, etant donne qu’il est possiblede modifier la loi de commande et donc de changer f(x) afin que LfV ait demeilleures proprietes.
8.3 Structure cascade
Construire une fonction de Lyapunov pour tout l’etat x est une tacheparfois tres difficile. C’est pourquoi, il est souvent plus judicieux de separer laconstruction en tirant avantage de la structure du systeme a commander.

8.3 Structure cascade 235
L’objectif est de faire apparaıtre une structure emboıtee, ou cascade. Parexemple,
z = f(z) + ψ(z, ξ) (8.2)
ξ = a(ξ, u) (8.3)
separe l’etat en deux contributions, z et ξ. Lorsque les deux sous-systemes,consideres separement, z = f(z) et ξ = a(ξ, u) sont stables, alors leur reunionpar le terme d’interconnexion non lineaire ψ(z, ξ) est egalement localementstable. Ainsi, on peut a l’aide de l’entree u stabiliser uniquement la partiedu bas (etat ξ) afin de stabiliser l’ensemble de la cascade (8.2) et (8.3). Leresultat est le suivant :
Theoreme 8.1. On suppose que le terme de couplage non-lineaire ψ(z, ξ)est tel que ψ(z, 0) = 0. Si z = 0 est un point d’equilibre asymptotiquemetstable de z = f(z), alors n’importe quel retour partiel de l’etat u = k(ξ) ren-dant l’equilibre du sous-systeme (8.3) ξ = 0 asymptotiquement stable, rendegalement l’ensemble de la cascade (8.2-8.3) localement asymptotiquementstable.
Preuve. Soit U(ξ) une fonction de Lyapunov pour le sous-systeme ξ =a(ξ, k(ξ)). Ceci signifie egalement que V (z, ξ) = U(ξ) est une fonction semi-definie positive pour l’ensemble de la cascade. Maintenant, la stabilite du pointd’equilibre complet z = 0 et ξ = 0 suit du theoreme de stabilite conditionnel,parce que ce point d’equilibre est conditionnellement stable a l’ensemble
z, ξ|V (z, ξ) = 0 = z, ξ|ξ = 0.
La stabilite conditionnelle revient a restreindre les choix de la boule d’exigenceet de celle des conditions initiales a l’intersection entre celles-ci et l’ensembleen question. Les resultats de stabilite de LaSalle s’adapte mutatis mutandis.Soit Ωz la region d’attraction de la dynamique z = f(z) et Ωξ, celle de la
dynamique ξ = a(ξ, k(ξ)). Etant donne que l’equilibre complet est stable, ilexiste un voisinage Ω tel que toute solution z(t), ξ(t) commencant dans Ω estbornee et demeure dans Ωz × Ωξ pour tout instant du temps t ≥ 0. Lorsquet → ∞, ξ(t) → 0 de telle sorte que z(t), ξ(t) convergent vers le plus grandensemble invariant de z = f(z) compris dans Ωz × 0, qui n’est rien d’autreque le point d’equilibre complet z = 0, ξ = 0, demontrant ainsi la stabiliteasymptotique.
Dans une structure cascade, il n’est pas toujours possible d’atteindre unestabilite globale, bien que les sous-systemes soient globalement stables.
Toutefois, il est souvent possible d’atteindre une region de stabilite aussigrande que l’on veut, par un choix judicieux de la loi de commande. C’est leconcept de stabilite semi-globale.

236 8 Commande par les methodes de Lyapunov
Definition 8.2. Un systeme x = f(x, u) est dit semi-globalement stabilisable,s’il est possible, pour tout ensemble compact aussi large que possible Ω detrouver une loi de commande u = k(x) telle que le systeme x = f(x, k(x))possede un bassin d’attraction qui contient Ω.
Exemple 8.3. Le systeme avec z ∈ R et ξ ∈ R,
z = −z + ξz2
ξ = u
munit de la loi de commande u = −kξ, k > 0, garantit la stabilite asympto-tique de (z, ξ) = (0, 0). La region d’attraction peut alors etre estimee a l’aidede la fonction de Lyapunov V = z2 + ξ2. La derivee,
V = −2(z2 + kξ2 − ξz3) = −(
z ξ)
(
2 −z2
−z2 2k
)(
zξ
)
(8.4)
est negative pour z2 < 2√k. Par consequent, une estimee de la region d’at-
traction est alors donnee par la condition que V < 0, ce qui signifie que le
gain k devrait etre choisit telle que k > c2
4 .
Ainsi, il est toujours possible de rendre aussi grand que l’on desire la regiond’attraction, a condition d’augmenter suffisamment le gain k.
Cependant, il n’est pas possible de stabiliser globalement un tel systeme.Prenons par exemple z = 1
σ , ce qui transforme l’equation non lineaire z =−z+ξz2 en σ = σ−ξ. C’est une equation du premier ordre avec comme entreela variable ξ. La formule generale pour la solution explicite de x = Ax + Budonne x(t) = x0e
At+∫ t
0eA(t−τ)Bu(τ)dτ . Dans notre cas A est un scalaire egal
a −1, u(t) correspond a ξ(t) (egalement un scalaire) et B = 1. En consequence,
σ(t) = σ(0)e−t +
∫ t
0
et−τξ(τ)dτ.
Il est important de comprendre que l’on considere l’entree ξ(t) comme l’entreeu du sous systeme dont l’etat est z. En revenant dans la variable z,
z(t) =e−t
1z(0) −
∫ t
0e−τξ(τ)dτ
.
Nous rencontrons le phenomene deja esquisse dans le premier chapitre concer-nant les proprietes des systemes non lineaires, a savoir que lorsque z(0) >(∫∞
0e−τξ(τ)dτ
)−1le denominateur finit par s’annuler a un instant fini condui-
sant z a devenir infini en un temps fini : C’est une explosion en temps finiempechant le systeme de converger ulterieurement. Le transitoire de z est de-venu trop grand par rapport a sa tendance naturelle de decroıtre en absence

8.3 Structure cascade 237
d’excitation cree par ξ. Ce phenomene exclu ainsi des conditions initiales dubassin d’attraction.
La limitation du bassin d’attraction, malgre la stabilite des deux sous-systemes z et ξ pris isolement, est liee au mauvais transitoire qui est en quelquesorte amplifie par le terme de couplage entre les deux sous-systemes.
Par consequent, il est possible de limiter cet effet en choisissant commesous-systemes ceux qui sont couples de maniere a ne pas engendrer une tellesur-sensibilite au transitoire. Dans l’exemple precedent, le terme de couplagecomporte ξ multiplie par z2. C’est l’apparition du facteur au carre qui cree desdifficultes. De plus, il faut egalement veiller a ne pas prendre comme variableξ une variable ayant de mauvaises caracteristiques transitoires.
Ces deux elements, a savoir la nature du couplage et la nature de la variableξ sont maintenant etudies plus en detail. Il s’agit de determiner des conditionsfavorables a la stabilisation globale des deux sous-systemes reunis.
8.3.1 Restriction de la croissance du terme de couplage
En general, comme la fontion de Lyapunov a tendance a croıtre de manieremonotone lorsque l’etat s’eloigne de la valeur d’equilibre, il est utile de dis-tinguer cette classe de systemes par rapport a cette propriete. Cependant,cette croissance peut obeir a une loi compliquee. C’est pourquoi nous intro-duisons une facon de caracteriser celle-ci sans pour autant entrer dans le findetail de savoir exactement comment cette fonction augmente. Nous estimonsla croissance en designant les fonctions de classe K.
Definition 8.4. Une fonction γ(.) : R+ → R+ est dite de classe K si elleest continue, strictement croissante et s’annule pour la valeur nulle, c.-a-d.γ(0) = 0.
A l’aide de cette definition nous pouvons donner une hypothese concernantla croissance du terme de couplage ψ(z, ξ) apparaissant dans (8.2).
Definition 8.5. (croissance du terme d’interconnexion) La fonction ψ(z, ξ)est de croissance lineaire en z s’il existe deux fonctions de classe K, disonsγ1(.) et γ2(.), differentiable en ξ = 0 et telles que
‖ψ(z, ξ)‖ ≤ γ1(‖ξ‖)‖z‖ + γ2(‖ξ‖).
A l’aide de cette definition nous pouvons etablir la condition pour que lastabilite globale aie lieue :
Theoreme 8.6. Supposons que le terme de croissance soit conforme a ladefinition 8.5. Supposons egalement que la linearisation locale (A,B) deξ = a(ξ, u) au point ξ = 0 soit stabilisable. Soit k(ξ) une loi de commande

238 8 Commande par les methodes de Lyapunov
continue qui rende le point ξ = 0 de ξ = a(ξ, k(ξ)) globalement asymptoti-quement stable et localement exponentiellement stable. Maintenant, s’il existeune fonction W (z) semi-definie positive et radialement non bornee, ainsi quedes constantes c et M telles que pour tout ‖z‖ > M on ait :
1. LfW (z) ≤ 0;
2. ‖∂W∂z ‖‖z‖ ≤ cW (z)
alors la loi de commande u = k(ξ) garantit que toutes les solutions de (8.2-8.3)restent bornees. Si par ailleurs, z = f(z) est globalement asymptotiquementstable, alors la loi de commande u = k(ξ) rend le point d’equilibre complet(z, ξ) = (0, 0) globalement asymptotiquement stable.
Preuve. Soit z(0) et ξ(0) des conditions initiales arbitraires. Les deux pro-prietes 1. et 2. Ainsi que l’hypothese sur la nature de l’interconnexion en-traıne :
W = LfW + LψW ≤ ‖∂W∂z
‖ψ‖
≤ ‖Wz‖(γ1(‖ξ‖) + γ2(‖ξ‖)‖z‖
D’autre part, etant donne que le point d’equilibre ξ = 0 de ξ = a(ξ, k(ξ)) estlocalement exponentiellement stable, il est garantit qu’il existe une constanteα et une fonction γ de classe K telles que
W (z(t)) ≤ ‖∂W∂z
‖(γ‖ξ(0)‖)e−αt(1 + ‖z(t)‖)
≤ ‖∂W∂z
‖‖z(t)‖(γ‖ξ(0)‖)e−αt, ∀‖z(t)‖ ≥ 1
En faisant usage de la propriete 2., Il existe une fonction K1(.) de classe Ktelle que pour z suffisament petit (c.-a-d. ‖z(t)‖ > max1,M), l’estimee
W ≤ K1(‖ξ(0)‖)e−αtW
est vraie. Ceci demontre la bornitude de W etant donne qu‘il est egalementvrai que
W (z(t)) ≤W (z(0))eR
τ
0 K1(‖ξ(0)‖)e−ατdτ ≤ K(‖ξ(0)‖)
pour une certaine fonction K de classe K. Puisque W (z) est radialementnon bornee, la bornitude de ‖z‖ est garantie. Finalement, si z = f(z) estglobalement asymptotiquement stable, cette meme propriete s’applique aupoint d’equilibre complet z = 0, ξ = 0, a cause du theoreme ??.
Etonnament, et surtout malheureusement, la croissance lineaire du termede couplage (selon la Definition 8.5), couple avec la decroissance exponentielle,ne sont pas suffisants pour empecher la destabilisation du sous-systeme z,comme va l’illustrer l’exemple suivant.

8.3 Structure cascade 239
Exemple 8.7. Le systeme
z1 = −z1 + z2ξ
z2 = −z2 + z21z2
ξ = u
Bien que satisfaisant les hypotheses croissance lineaire du terme d’intercon-nexion (celui-ci est donne par z2ξ pour la premiere equation et 0 sur la se-conde) ainsi que de stabilisabilite exponentielle du sous-systeme ξ, ne peutpas etre globalement stabilise.
Pour expliquer ce phenomene quelque peu paradoxal, remarquons, pourcommencer, que le sous systeme
z1 = −z1z2 = (−1 + z2
1)z2
est bien globalement stable, etant donne que
W (z) = z21 + z2
2ez21
est une fonction de Lyapunov radialement non bornee. En effet, un calculimmediat donne
W (z) = −2W (z).
Cependant, et c’est la que le paradoxe est leve, la condition 2. du theoremen’est pas satisfaite a cause du facteur de croissance tres rapide ez
2
1 . Pourmontrer que ceci engendre la perte de la stabilite globale, considerons unecondition initiale ξ(0) > 0 de telle sorte que pour tout t ≥ 0, ξ(t) ≥ 0.Comme la loi de commande k(ξ) est suppose differentiable, ξ(t) ≥ Cξ(t)pour une certaine constante positive C > 0. Maintenant, considerons unecondition initiale z2(0) > 0 de telle sorte que pour autant que z2
1(t) > C + 2la relation z2 ≥ (C + 1)z2(t) est valable. En combinant ces deux estimations,nous obtenons que sous la condition z1(t)
2 ≥ C + 2 il est egalement vrai que
d
dt(z2ξ) ≥ (C + 1)z2ξ − Cz2ξ = z2ξ.
Finalement, en choisissant z2(0)ξ(0) > z1(0) >√C + 2, il est garantit que la
condition initiale z1(0) > 0. Mais z1(t) croıt au cours du temps a cause de
z1(t) =d
dt(z2ξ − z1) − Cz2ξ = z2ξ.
Comme ξ(t) converge vers zero tout en demeurant positif, cela induit z2(t) adevenir non-borne.

240 8 Commande par les methodes de Lyapunov
Cet exemple insiste sur l’importance de la structure de la fonction de Lyapu-nov. Non seulement le type de croissance est important pour le terme d’inter-connexion entre les deux sous systemes isolement stable, mais il est egalementtout aussi important dans la maniere dont la fonction de Lyapunov croıt ens’ecartant de l’equilibre. Si cette croissance est trop rapide, alors il est pos-sible de la faire decroıtre beaucoup dans une petite region de l’espace d’etat,encourageant l’apparition d’explosion en temps fini.
Les resultats precedents reposent sur la decroissance exponentielle de ξ.Au lieu de cette condition, le concept de stabilite entree-etat est introduit.Considerons le sous-systeme
z = f(z) + ψ(z, ξ).
L’idee derriere ce nouveau concept de stabilite est d’exiger que toute solutionz de cette equation differentielle reste bornee lorsque la variable ξ (considereecomme une entree) converge vers zero. Cette propriete est suffisante pourgarantir la stabilite asymptotique globale de l’equilibre complet z = 0 ξ = 0lorsque z = f(z) est globalement asymptotiquement stable.
Definition 8.8. Le systeme x = f(x, u) est stable entree-etat s’il existe unefonction decroisante β et une fonction de classe K telle que pour toute entreebornee u(.) et chaque condition initiale x(0) la solution x(t) existe pour toutt ≥ 0 et est bornee par
‖z(t)‖ ≤ β(‖z(0)‖, t) + γ( sup0≤τ≤t
‖ξ(τ)‖)
En quelque sorte, on elimine d’entree la possibilite d’avoir des explosionsen temps fini. Cette definition serait assez inutile s’il n’y avait pas de moyensde la determiner de maniere indirecte. Le premier resultat dans cette directionassure que cette definition est respectee dans la cas ou la fonction de Lyapunovne croıt pas trop vite.
Le second permet de characteriser la propriete de stabilite entree-etat parl’intermediaire d’une nouvelle fonction de type Lyapunov que l’on designe parle nom de fonction de Lyapunov entree-etat.
Lemme 8.9. On suppose que le terme de couplage est lineaire en z et quele systeme z = f(z) est globalement asymptotiquement stable avec commefonction de Lyapunov W (z) satisfaisant la condition de croissance
α1‖z‖2 ≤W (z) ≤ α2‖z‖2, ‖∂Wz
‖ ≤ α3‖z‖LfW ≤ −α4W (z), αi > 0, i = 2, . . . , 4.
Sous ces conditions, la solution z(t) de (8.2) est bornee et converge vers zeropour tout ξ(t) convergeant vers zero.

8.3 Structure cascade 241
Preuve. Le long des solutions de (8.2),nous avons
W (z) ≤ −α4W (z)2α3‖z‖‖ψ(z, ξ)
pour une certaine fonction de classe K, de telle sorte
W (z) ≤ (−α4 +α3
α1γ(‖ξ‖))W (z).
Ceci demontre que W (z(t)) existe pour tout t ≥ 0. De plus, puisque ξ(t)converge vers zero, il existe un temps fini apres lequel
W (z) ≤ 1
2α4W (z),
Conduisant a ce que z demeure borne et converge exponentiellement vers 0.
On se tourne maintenant vers le deuxieme resultat concernant la caracterisationde la propriete de stabilite entree-etat.
Theoreme 8.10. Le systeme x = f(x, u) est stable entree-etat a conditionqu’il existe une fonction radialement non bornee W (z) telle que
‖x‖ ≥ χ1(‖u‖) ⇒∂w
∂xf(x, u) ≤ −χ2(‖x‖),
ou χ1 et χ2 sont des fonctions de classe K.
Definition 8.11. La fonction W (z) satisfaisant aux hypotheses du theoremeprecedent 8.10 est appelee une fonction de Lyapunov entree-etat.
Un corollaire immediat de ceci est :
Corollaire 8.12. Si le systeme z = f(z) + ψ(z, ξ) est stable entree-etat avecξ pour entree, et que, d’une part, le systeme z = f(z) est globgalement asymp-totiquement stable et, d’autre part, qu’il existe un bouclage u = k(ξ) rendantξ = 0 de ξ = a(ξ, k(ξ)) globalement asymptotiquement stable, alors le bouclageen question rend egalement le point d’equilibre complet de la cascade (8.2-8.3)globalement asymptotiquement stable.
La demonstration de ces resultats sont exposes dans le papier de E.D. Son-tag et Y. Wang “On characterizations of the input-to-state stability property”,Systems & Control Letters, vol. 24, pp. 351-359, 1995.
Nous terminons cette section par un exemple illustratif.
Exemple 8.13. En prenant comme fonction de Lyapunov entree-etat W (z) =z2
2 , le systeme

242 8 Commande par les methodes de Lyapunov
z = −z3 + z2ξ
ξ = ξ2u
est globalement asymptotiquement stable. En effet,
W = −z4 + ξz3 ≤ −1
4z4 +
1
4ξ4
ou la derniere inegalite provient de l’homogeneisation du ”ballon de rugby”.W est donc bien une fonction de Lyapunov entree-etat. Pour de grand z, leterme stabilisant −z3 dans la cascade domine le terme de perturbation z2ξ etle bouclage u = −ξ conduit toute la cascade a etre globalement asymptoti-quement stable, meme si la convergence de ξ vers zero n’est pas exponentielle.
8.4 Passivation
Dans la section precedente, nous avons explicitement admis une decompositionen sous-systemes individuellement globalement asymptotiquement stables oustabilisables. Or, imposer de telles proprietes aux sous-systemes composantle systeme d’origine limite quelque peu les possibilites de synthese des loisde commande. En effet, il est nullement indique comment forcer un systemedonne a priori a admettre une telle decomposition. Toutefois, l’analyse ef-fectuee a souligne l’importance de considerer attentivement la maniere dontla cascade resultante est connectee, meme lorsque les proprietes de stabiliteindividuelle sont garanties.
Conformement a cette optique, considerer de bonnes proprietes des systemesisoles pour garantir la stabilite du systeme complet est une excellente faconde proceder pour construire des lois de commandes globales a partir d’unedecomposition en sous-systemes. Par exemple, le chapitre 5 a montre quedeux systemes passifs interconnectes demeurent passifs.
De plus, les systemes passifs ont une excellente propriete pour la stabili-sation. En effet, un bouclage par un gain negatif de leur sortie sur leur entreeconduit a une stabilite garantie, a condition que l’etat nul soit detectable.
Definition 8.14. L’etat nul detectable signifie que lorsque la sortie d’unsysteme x = f(x), y = h(x) est nulle sur un interval de temps fini, alorsl’etat x est nul necessairement.
Theoreme 8.15. Soit
x = f(x, u)
y = h(x)
un systeme passif avec comme fonction de stockage interne V (x) et commepoint d’equilibre x = 0, u = 0 (c.-a-d. 0 = f(0, 0)). Si le systeme est zero

8.4 Passivation 243
detectable, alors le bouclage u = −y assure la stabilite asymptotique dusysteme. Si la fonction V (x) est radialement non bornee, alors la stabiliteasymptotique est globale.
Preuve. La passivite garantit
V = uy − g(x)
avec g(x) > 0. Comme y = −u par le choix du bouclage,
V = −uTu− g(x) ≤ 0,
de telle sorte qu’il est possible d’appliquer le theoreme d’invariance de LaSalle.
L’ensemble R = x | V (x) = 0 est alors celui pour lequel −yT y−g(x) = 0.Il faut donc simultanement g(x) = 0 et yT y = 0. Le plus grand invariantcontenu dans cet ensemble doit donc satisfaire yT y = 0 pour tout temps. Or,l’hypothese de detectabilite implique que si la sortie est nulle sur un intervalde temps fini, alors l’etat x est necessairement nul. Par consequent, l’ensembleinvariant M inclu dans R est l’origine x = 0, et la stabilite est demontree.
La stabilite globale suit de l’hypothese de non bornitude radiale de V (x).
A l’aide de ce theoreme, il est possible de stabiliser un systeme comportantune decomposition en deux systemes passifs interconnectes. L’interconnexionconsiste en une succession de boucles et de connexion parallele preservant lapassivite (voir section ??).
Le grand avantage de l’utilisation de la passivite est que la restriction dutaux de croissance du terme d’interconnexion n’est plus necessaire (contraire-ment a la cascade simple comme nous l’avons vu a la section 8.3.1). De plusl’hypothese de stabilite asymptotique globale du sous-systeme z = f(z) estremplace par la stabilite globale simple (non necessairement asymptotique).
Pour le voir, commencons par examiner le systeme
z = f(z) + ψ(z, ξ)
ξ = Aξ +Bu.
Afin de faire apparaıtre deux systemes passifs interconnectes, le terme decouplage ψ(z, ξ) est a nouveau factorise, mais en faisant apparaıtre le facteurCξ
ψ(z, ξ) = ψ(z, ξ)Cξ (8.5)
Cette factorisation permet d’identifier un block lineaire dont la fonction detransfert est
G1(s) = C(sI −A)−1B.
Pour que ce systeme soit passif, il suffit que la fonction de transfert G1(s) soitpositive reelle (la reponse harmonique G(jω) doit etre a partie reelle positive),comme nous l’avons vu au chapitre sur la passivite.

244 8 Commande par les methodes de Lyapunov
Quand au second block, il est decrit par l’equation differentielle
z = f(z)ψ(z, ξ)u2,
avec commen entreeu2 = y1 = Cξ;
la sortie y2 restant encore a etre definie pour garantir la passivite.
Cette sortiey2 = h2(z, ξ)
doit etre choisie afin qu’une fonction de stockage interne existe. En prenantla fonction de Lyapunov W (z) (associee au sous-systeme z) comme fonctionde stockage, il suffit de garantir
W =∂W
∂z(f(z) + ψ(z, ξ)y1) ≤ yT2 u2. (8.6)
Comme LfW ≤ 0, la relation (8.6) ci-dessus est satisfaite a condition que
y2 = h2(z, ξ) := (LψW )T (z, ξ) = ψT(
∂W
∂z
)T
.
Ce choix de sortie garantit ainsi la passivite du deuxieme block de lacascade. Finalement, le bouclage sur le systeme initial
u = −h2(z, ξ) + v
garantit que le systeme complet vu depuis la nouvelle entree v et la sortie y1est passif. En posant
v = −y1l’ensemble de la cascade est stabilisee.
La construction ci-dessus n’est pas limitee au cas ou la dynamique en ξest lineaire, et nous avons le resultat suivant :
Theoreme 8.16. Soit la cascade
z = f(z) + ψ(z, ξ) (8.7)
ξ = a(ξ) + b(ξ)u (8.8)
avec z = 0 un point d’equilibre globalement stable pour z = f(z) de tellesorte qu’il existe un fonction de Lyapunov radialement non bornee W (z) avecLfW (z) ≤ 0. Supposons egalement qu’il existe une sortie ne dependant quede ξ, disons y = h(ξ) de telle sorte que
1. Le sous systeme
ξ = a(ξ) + b(ξ)u (8.9)
y = h(ξ) (8.10)
est passif avec comme fonction de stockage U(ξ), egalement radialementnon bornee.

8.4 Passivation 245
2. Le terme de connexion se factorise sous la forme ψ(z, ξ) = ψ(z, ξ)ξ.
alors la cascade (8.7-8.8) peut etre rendue passive par retour d’etat donne par
u = LψWT (z, ξ) + v
avec comme nouvelle entree v et comme fonction de stockage
V (z, ξ) = W (z) + U(ξ).
De plus, si ce systeme est zero detectable par la sortie y = h(ξ), alors lebouclage v = −ky avec k > 0 garantit la stabilite globale asymptotique dupoint d’equilibre (z, ξ) = (0, 0).
Remarque 8.17. Il y a essentiellement deux conditions pour atteindre la sta-bilite globale
1. La connexion lineaire par le terme ψ(x, ξ), c.-a-d. la possibilite de facto-riser ce terme sous la forme ψ(x, ξ) = ψ(x, ξ)ξ.
2. L’existence de deux fonctions de Lyapunov radialement non bornee pourles deux sous-systemes.
Remarque 8.18. La passivite possede comme grand avantage sur les retourspartiels d’etat simple, de ne pas imposer de condition sur la croissance duterme de couplage. Remarquons egalement qu’il n’est pas exige que la partiedu haut z = f(z) soit asymptotiquement stable ; c’est uniquement la stabilitequi est necessaire.
Pour illustrer la derniere remarque, un exemple avec un terme de couplageayant une croissance rapide est presente.
Exemple 8.19. Nous avons vu que l’exemple
z = −z + z2ξ
ξ = u
n’est pas globalement stabilizable par retour partiel d’etat a cause de la crois-sance du terme de couplage z2ξ. Maintenant, en considerant la sortie y1 = ξ,un sous block G1(s) passif est delimite. Ensuite, en posant W (z) = z2 commefonction de stockage, nous constatons que la premiere equation du modelecorrespond a un systeme passif d’entree u2 = ξ et de sortie y2 = z3. Ainsi,le bouclage u = −y2 + v = −z3 + v transforme la cascade initiale en uneconnexion de deux systemes passifs. La propriete de nulle detectabilite de lasortie est egalement satisfaite parce qu’a l’interieur de l’ensemble y1 = ξ = 0,le systeme complet se reduit a z = −z. C’est pourquoi la loi de commandez = −ky1 (avec k > 0) rend l’ensemble de la cascade globalement asmptoti-quement stable.

246 8 Commande par les methodes de Lyapunov
Remarque 8.20. Bien que l’hypothese de croissance du terme de couplage n’ap-paraıt plus dans le cas de l’utilisation de la passivite, des restrictions destructure sont neanmoins presentes. En effet, la sortie des deux sous-systemesdoit etre de degre relatif au maximum de un et le sous-systeme entree-sortieselectionne doit egalement etre a phase minimale.
8.5 Phenomene du peaking
Que cela soit lors de l’utilisation de retours partiels, ou lors de l’exploita-tion de la propriete de passivite, des limitations de structure sont presentes.Elles sont associees a certaines proprietes des sous-systemes envisages (stabi-lite, degre relatif, minimum de phase) et egalement a la nature de l’intercon-nexion (type de croissance).
Toutes ces limitations tirent leur origine essentiellement du phenomene depeaking que nous presentons dans cette section. Ce phenomene a deja eteesquisse pour illustrer l’importance du taux de croissance du terme d’inter-connexion dans le cas des retours partiels.
x = −x+ yx2
z1 = z2
z2 = u
y = c1z1 + c2z2
Ces equations representent un double integrateur (etats z1 et z2) inter-connecte a un systeme exponentiellement stable (x = −x) par le terme deconnexion yx2. Cet exemple est fortement inspire du modele de la bille quiroule sur une barre ou la force centrifuge est interpretee comme le terme d’in-terconnexion. Toutefois, contrairement a ce modele, ou θ et θ jouent le rolede z1 et z2, la non-linearite yx2 contient la variable du haut x, alors que dansle cas de la bille sur le barreau, le terme rθ2 comporte une non-linearite surla variable du bas θ.
La variable intermediaire y est introduite afin de montrer l’influence descoefficients c1 et c2 sur l’effet du terme de connexion yz2 sur la stabilite dusysteme complet. Cette variable y peut egalement etre interpretee comme unesortie permettant l’application de la theorie de la passivite.
Lorsque y est maintenu constant a une valeur non nulle, la premiereequation differentielle x = −x + yx2 devient tres similaire a celle (1.2) ana-lysee dans le chapitre introductif. Nous avons vu que pour certaines conditionsinitiales, le systeme explose en temps fini. Il est donc necessaire d’eviter si pos-sible un tel phenomene.
En effet, en faisant decroıtre y convenablement par rapport a l’evolutionde x, le coefficient devant le facteur x2 peut devenir suffisamment petit pour

8.5 Phenomene du peaking 247
que l’etat x soit toujours du bon cote par rapport a la separation constateesur la figure 1.2. Clairement, si y est force a une constante, il y aura toujoursdes conditions initiales pour lesquelles la trajectoire solution s’echappera al’infini en un temps fini.
La difficulte d’augmenter le bassin d’attraction du point d’equilibre pro-vient essentiellement du probleme de peaking, a savoir la possibilite que letransitoire de y ait une tendance a s’amplifier en fonction des conditions ini-tiales z1(0) et z2(0).
Pour un systeme lineaire z = Az+Bu, un gain K est choisit de telle sorteque u = −Kz place les valeurs propres de A − BK avec une partie reelleinferieure a −a < 0. Pour que z1 et z2 convergent rapidement vers 0, il fautque a soit suffisament grand. Chaque composante de z est alors bornee parune exponentielle decroissante de taux a :
z1(t) < C1(z1(0), z2(0), k)e−kt z2(t) < C2(z1(0), z2(0), k)e−kt.
Les coefficients C1 et C2 devant ces exponentiels sont tres importants etdependent en general du gain k choisi et de la valeur des conditions initales.De maniere generale, chaque etat a un coefficient γi = γik
πi avec γi ne dependque de la condition initiale.
0 1 2
-5
0
t
y
Fig. 8.1. Phenomene du peaking. Le systeme x + 2kx + k2x est simule en posantx1 = x et x2 = x. Le gain est fixe a quatre valeurs croissantes, k = 3, 4, 10, et 20. Lasortie y = x1 ne comporte pas de phenomene de peaking (traitille) ; elle reste borneeentre deux valeurs independamment du gain k choisi. La sortie y = x2 comporte unphenomene de peaking (trait plein). Pour tout choix de borne de y, il est toujourspossible en augmentant le gain k de depasser cette borne. Le transitoire est amplifieau fur et a mesure que le gain k augmente.

248 8 Commande par les methodes de Lyapunov
Definition 8.21. Le systeme ξ = f(ξ, u), y = g(ξ), u ∈ R, y ∈ Rp n’a pasde phenomene de peaking si pour tout nombre reel a > 0 et pour chaquecondition initiale ξ(0) ∈ Rp, il existe une entree u(.) : R → R telle que l’etatξ(t) converge a zero et que la sortie y(t) satisfasse
‖y(t)‖ ≤ γ‖ξ(0)‖(e−σat +1
a),
ou les constantes γ, σ ne dependent pas du parametre a.
En exigeant que l’on puisse borner le transitoire, on limite les difficultesrencontrees pour passer de la stabilite locale a la stabilite semi-globale etglobale.
8.6 Backstepping
La technique de decomposition en cascade fondee sur la propriete de passi-vite exige que les sous-systemes de la decomposition soient de degre relatif un.Il est parfois difficile de garantir une telle propriete. La technique de backs-tepping permet de court-circuiter en quelque sorte un ordre de l’equationdifferentielle composant un des sous-blocks, et permet ainsi d’etendre quelquepeu la technique de passivation a une plus large classe de systemes.
Le backstepping consiste a negliger momentanement l’influence d’une par-tie de l’etat sur une autre. Soit le systeme particulier
x = f(x) + g(x)z
z = u,
ou l’etat z est clairement separe de la partie x. Au lieu de calculer directementla fonction de Lyapunov pour le systeme complet V (x, z), ainsi que la loi debouclage final k(x, z), une fonction intermediaire V0(x) impliquant unique-ment la partie de l’etat designee par x est consideree. La variable d’etat z esttraitee comme l’entree du systeme x = f(x) + g(x)z. Son evolution donneepar z = u est pour l’instant ignoree.
Par consequent, la determination de Vo(x) et z = k0(x) s’effectue commea la section precedente.
8.6.1 Fonction de Lyapunov reduite
Il s’agit de determiner V0(x) et la loi de commande ideale z = k0(x) detelle sorte que la derivee de Lie de cette fonction le long du champ de vecteurf = f(x) + g(x)k0(x) soit negative. Ce vecteur est obtenu lorsqu’on considerequ’il est possible d’agir instantanement sur la valeur de la variable z et de

8.6 Backstepping 249
pouvoir ainsi la forcer a etre egal a k0(x). En outre, on suppose qu’il estegalement possible de determiner une fonction definie positive W (x) telle quecette derivee soit egale a −W (x) :
V0 =∂V0
∂x(f(x) + g(x)k0(x)) = −W (x), (8.11)
8.6.2 Fonction de Lyapunov complete
A partir de la fonction de Lyapunov reduite, il est possible de trouverun candidat de Lyapunov pour le systeme complet en ajoutant a la fonctionreduite V0(x) un terme d’erreur quadratique entre l’etat z reel et sa valeurideale correspondant a k0(x). Ainsi, on tient compte explicitement du fait qu’iln’est pas possible de forcer instantanement ces deux quantites a etre egales,contrairement au paragraphe precedent.
La variable d’erreure = z − k0(x)
est introduite a partir de laquelle la fonction de Lyapunov complete s’exprime
V (x, z) = V0(x) +1
2e2 = V0(x) +
1
2(z − k0(x))
2.
Avec un tel choix, la derivee de V le long des trajectoires solutions devient
V (x, z) =∂V0
∂xx+ ee
=∂V0
∂x(f(x) + g(x)z) + ee
=∂V0
∂x(f(x) + g(x)(e+ k0(x))) + ee. (8.12)
A ce stade, on utilise une astuce permettant d’utiliser (8.11). En effet, enisolant le facteur e, l’expression centrale de (8.11) apparaıt dans (8.12) :
V (x, z) =∂V0
∂x(f(x) + g(x)k0(x)) +
∂V0
∂xg(x)e+ ee
= −W (x) +∂V0
∂xg(x)e+ ee. (8.13)
En consequence, la derivee de la fonction de Lyapunov contient un termeclairement negatif, −W (x), et deux termes de signe indefini. Toutefois, nousn’avons pour l’instant pas utiliser la commande u du systeme complet. Cettecommande u apparaıt indirectement dans l’expression (8.13) par l’entremisede la derivee de l’erreur e. C’est pourquoi nous pouvons assigner une expres-sion convenable a e de telle sorte que les trois termes de (8.13) deviennentnegatifs. Comme la variable d’erreur e apparaıt comme un facteur dans les

250 8 Commande par les methodes de Lyapunov
deux termes de signe indefini, il suffit de prendre pour e une expression conte-nant deux termes, le premier permettant de compenser la partie de signeindefini, et le second, proportionnel a e, forcant la negativite :
e = −∂V0
∂xg(x) − ke; (8.14)
ainsi,
V (x, z) = −W (x) − kee.
Finalement, en derivant l’expression definissant l’erreur e = z − k0(x),
e = z − ∂k0
∂xx
= u− ∂k0
∂x(f(x) + g(x)z).
et en tenant compte de (8.14), on obtient u :
u = −k(z − k0) −∂V0
∂xg(x) +
∂k0
∂x(f(x) + g(x)z).
8.6.3 Exemple
Il s’agit d’un systeme comprenant deux etats x1 et x2. La commandeintervient comme la derivee du second etat.
x1 = x21 − x3
1 + x2 = f(x1) + g(x1)x2 (8.15)
x2 = u (8.16)
Dans un premier temps, l’etat x2 est suppose varier instantanement etselon la volonte du concepteur. Ainsi, x2 joue le role d’une entree pour ladynamique du premier etat. Idealement, x2 = −x2
1 − x1 de telle sorte quex1 = −x1 − x3
1. Par consequent,
k0(x1) = −x21 − x1
V0(x1) =1
2x2
1
donne le bouclage et la fonction de Lyapunov reduite correspondante. En effet,
V0 = x1x1 = −x21 − x4
1 < 0,
ce qui signifie que la commande reduite conduit a la stabilite asymptotiquedu systeme reduit.

8.6 Backstepping 251
A partir de la fonction reduite V0(x1), l’expression de la fonction de Lya-punov pour le systeme complet est deduite en introduisant l’erreur entre levaleur ideale −x2
1 − x1 et la vraie valeur de x2 :
e = x2 − k0(x1)
e = x2 − (−x21 − x1) = x2 + x2
1 + x1
Ainsi,
V (x1, x2) = V0 +1
2e2
=1
2x2
1 +1
2(x2 + x2
1 + x1)2
Pour trouver la loi de bouclage, il suffit d’imposer une valeur convenablea la derivee de l’erreur e. Dans un premier temps, le terme de signe indefiniest compense et un terme proportionnel a l’erreur est egalement ajoute :
e = −∂V0
∂xg(x1) − ke = −x1 − k(x1 + x2
1 + x1)
Ensuite, l’entree u fait son apparition en derivant l’equation definissantl’erreur e = x2 + x2
1 + x1 :
e = u+ (2x1 + 1)(x21 − x3
1 + x2)
La loi de commande s’obtient par egalite entre ces deux expressions :
u = −x1 − k(x2 + x21 + x1) − (2x1 + 1)(x2
1 − x31 + x2) (8.17)
Ceci conduit au systeme en boucle fermee
x1 = x21 − x3
1 + x2
x2 = −x1 − k(x2 + x21 + x1) − (2x1 + 1)(x2
1 − x31 + x2)
Pour verifier si V = 12x
21+ 1
2 (x2+x21+x1)
2 est une fonction de Lyapunov, ilsuffit de deriver cette fonction et d’introduire la dynamique en boucle fermee.
V =1
2x2
1 +1
2(x2 + x2
1 + x1)2
V = x1x1 + (x2 + x21 + x1)(x2 + (2x1 + 1)x1)
= x1x1 + (x2 + x21 + x1)(2x1 + 1)x1 + (x2 + x2
1 + x1) x2
= x1(x21 − x3
1 + x2) + (x2 + x21 + x1)(2x1 + 1)(x2
1 − x31 + x2) +
(x2 + x21 + x1)(−x1 − k(x2 + x2
1 + x1) − (2x1 + 1)(x21 − x3
1 + x2))
= x1(x21 − x3
1 + x2) + (x2 + x21 + x1)(2x1 + 1)(x1 − x3
1 + x2) −x1(x2 + x2
1 + x1) − k(x2 + x21 + x1)
2 −(x2 + x2
1 + x1)(2x1 + 1)(x1 − x31 + x2)
= x31 − x4
1 + x2x1 − x1x2 − x31 − x2
1 − k(x2 + x21 + x1)
2
= −x21 − x4
1 − k(x2 + x21 + x1)
2 < 0

252 8 Commande par les methodes de Lyapunov
On constate donc bien que la derivee est partout negative sauf a l’origine. Enconsequence, le systeme (8.15)-(8.16) munit la loi de bouclage (8.17) est glo-balement asymptotiquement stable etant donne que (i) V (x1, x2) est partoutpositive sauf a l’origine ; (ii) V (x1, x2) est partout negative sauf a l’origine ;et finalement (iii) V (x1, x2) est radialement non bornee.

Litterature
[Boo75] W.A. Boothby. An Introduction to Differentiable Manifolds and Rieman-
nian Geometry. Academic Press, New York, 1975.
[BS70] N. P. Bhatia and G. P. Szego. Stability Theory of Dynamical Systems.Springer-Verlag, Berlin, 1970.
[Car71] E. Cartan. Lecons sur les invariants integraux. Hermann, Paris, 1971.
[Che46] C. Chevalley. Theory of Lie Groups. Princeton University Press, Prince-ton, 1946.
[Che61] N. G. Chetaev. The Stability of Motion. Pergamon Press, Oxford, 1961.
[For59] A. R. Forsyth. Theory of Differential Equations, Part I. Exact Equations
and Pfaff’s Problem. Dover Publications, Inc., Varick Street, New York,1959.
[GH83] J. Guckenheimer and P. Holmes. Nonlinear Oscillations, Dynamical Sys-
tems, and Bifurcations of Vector Fields. Springer-Verlag, New York, 1983.
[GP74] V. Guillemin and A. Pollack. Differential Topology. Prentice-Hall, Engle-wood Cliffs, New Jersey, 1974.
[GVW68] A. Gelb and W. E. Vander Welde. Multiple-input Describing Functions
and Nonlinear System Design. McGraw-Hill, New York, 1968.
[Hah67] W. Hahn. Stability of Motion. Springer-Verlag, Berlin, 1967.
[Hir76] M. W. Hirsch. Differential Topology. Springer-Verlag, New York, 1976.
[HLP52] G. Hardy, J. E. Littlewood, and G. Polya. Inequalities. Cambridge Uni-versity Press, Cambridge, second edition, 1952.
[Isi89] A. Isidori. Nonlinear Control Systems. Springer-Verlag, Berlin, Heidel-berg, New York, second edition, 1989.
[Kha02] H. K. Khalil. Nonlinear Systems. Prentice-Hall, Upper Saddle River, NJ,2002.
[KN63] S. Kobayashi and K. Nomizu. Foundations of Differential Geometry, vo-lume 1 & 2. John Wiley & Sons, Inc., New York, 1963.
[LaS86] J. P. LaSalle. The Stability and Control of Discrete Processes. Springer-Verlag, Berlin, 1986.

254 Litterature
[LL61] J. P. LaSalle and S. Lefschetz. Stability by Liapunov’s Direct Method.Academic Press, New York, 1961.
[LL69] V. Lakshmikantham and S. Leela. Differential and Integral Inequalities,volume I & II. Academic Press, New York, 1969.
[LLM89] V. Lakshmikantham, S. Leela, and A. A. Martynuk. Stability Analysis of
Nonlinear Systems. Marcel Dekker, New York, 1989.
[Mee81] A. I. Mees. Dynamics of Feedback Systems. John Wiley & Sons, Chiches-ter, New York, Brisbane, Toronto, 1981.
[MM82] R.K. Miller and A. N. Michel. Ordinary Differential Equations. AcademicPress, New York, 1982.
[Mor01] S. Morita. Geometry of Differential Forms. American Mathematical So-ciety, Providence, Rhode Island, 2001.
[MT95] R. Marino and P. Tomei. Nonlinear Control Design. Prentice-Hall Europe,Hertfordshire, 1995.
[NvdS90] H. Nijmeijer and A. van der Schaft. Nonlinear Dynamical Control Sys-
tems. Springer-Verlag, New York, 1990.
[Sas99] S. Sastry. Nonlinear Systems. Springer-Verlag, New York, 1999.
[SJK97] R. Sepulchre, M. Jankovic, and P.V. Kokotovic. Constructive Nonlinear
Control. Springer-Verlag, London, 1997.
[SL91] J.-J. Slotine and W. Li. Applied Nonlinear Control. Prentice-Hall, UpperSaddle River, NJ, 1991.
[Son98] E.D. Sontag. Mathematical Control Theory : Deterministic Finite Dimen-
sional Systems. Springer-Verlag, New York, second edition, 1998.
[Vid93] M. Vidyasagar. Nonlinear Systems Analysis. Prentice-Hall, EnglewoodCliffs, NJ, 1993.
[Wal68] A.H. Wallace. Differential Topology, First Steps. W.A. Benjamin, Inc.,New York, Amsterdam, 1968.
[Wal70] W. Walter. Differential and Integral Inequalities. Springer-Verlag, Berlin,1970.
[Yos66] T. Yoshizawa. Stability Theory by Liapunov’s Second Method. Gakujut-sutosho Printing Co., Tokyo, 1966.
[Zub62] V.I. Zubov. Mathematical Methods for the Study of Automatic Control
Systems. Pergamon Press, Oxford, 1962.
[Zub64] V.I. Zubov. Methods of A. M. Lyapunov and their Applications. Noord-hoff, Groningen, 1964.

Index
elimination du temps, 15equation
integrale, 101equation d’erreur, 197equation differentielle
d’erreur, 198, 201solution, 150
1-forme, 92, 157, 158, 1701-forme
exacte, 170exemple, 180integrable, 170
, 229
Bellman-Gronwall, 101
candidat de Lyapunov, 71, 74chaıne
d’integrateurs, 226champ de vecteurs, 150, 223changement de coordonnees, 195chaos, 8commande
en boucle fermee, 201en boucle ouverte, 200
competition, 26comparaison, 97condition
d’exactitude, 174d’integrabilite, 174
conjecturede Aizerman, 130
Cotangent, 157
cotangent, 158covecteur, 157, 170critere
d’exactitude, 174d’integrabilite, 174de Nyquist, 57de Popov, 135du cercle, 130
crochetde Lie, 162, 222de Lie
proprietes, 162cycle limite, 19cycle limite
instable, 59stable, 58
decomposition en harmoniques, 37deflation, 99derivee
de Lie, 218derivation
exterieure, 164, 165, 171, 172exterieure
proprietes, 166, 173developpement limite, 100degre relatif, 119diffeomorphisme, 149, 195differentielle, 164, 171distribution, 223dynamique
de populations, 25dynamique

256 Index
interne, 211
ensemble invariant, 85espace
dual, 151explosion en temps fini, 8
fiabilite du premier harmonique, 61flot, 85Fonction
de Lyapunov, 159fonction
d’erreur, 198de Lyapunov, 122
fonction definie positive, 71fonction de Lyapunov, 72, 74, 86fonction de Lyapunov
methodes de construction, 91pour les systemes lineaires, 81
fonction radialement non bornee, 80forme
alternee, 156lineaire, 152multilineaire, 152, 156quadratique, 98
formule d’Ackermann, 212
gain equivalent, 35, 37, 43–45gradient, 157graphe des pentes, 14
inegalitede Cauchy-Schwarz, 103du triangle, 104
inegalitearithmetique-geometrique, 104
inflation, 99instabilite, 95, 96integrabilite, 168involutivite, 223
lemmede Bellman-Gronwall, 101
linearisation, 82, 191linearisation
entree-etat, 196entree-sortie, 214exacte, 195, 216
Lyapunov, 122
methodede Krasovskii, 92des isoclines, 16directe de Lyapunov, 71, 84du gradient variable, 92du premier harmonique, 31
majoration, 97matrice
defnie positive, 98minimum de phase, 119
non minimum de phase, 119non-linearite
continue par morceaux, 46de secteur, 128statique, 32
oscillateurde Van der Pol, 61lineaire, 50
passivite, 107passivite
connexion par retroaction, 113connexion parallele, 112definition, 111, 114notion intuitive, 108proprietes, 111systeme lineaire, 114
pendule inverse, 194placement de poles, 201plan de phase, 11planification de trajectoire, 200platitude, 216, 217point d’equilibre, 7, 22, 65population, 25poursuite, 199predateur, 28premier harmonique, 37principe
de superposition, 3produit
exterieur, 153, 156, 174scalaire, 153tensoriel, 152
proie, 28
retroaction, 47relais, 45

Index 257
robot flexible, 220
saturation, 43sortie
de Brunovsky, 212plate, 212, 216, 217
stabilielocale asymptotique, 131
stabilisation, 199stabilite, 65stabilite
absolue, 128, 130au sens de Lyapunov, 67critere de, 58definition precise, 66exponentielle, 79, 84globale, 79locale, 75, 82notion intuitive, 66preuve locale, 75
systemedynamique passif, 109lineaire, 209lineaire SISO, 202
reel positif, 116, 118statique passif, 109
systeme non-lineaire, 3
technique , de comparaison97,IeC de majoration97
termes d’ordre superieur, 6theoreme
d’invariance de LaSalle, 85de Bendixson, 24de Chetaev, 96de Frobenius, 184de Frobenius
version 1-forme, 188version champ de vecteur, 188
de l’index, 23de Nyquist, 52de Poincare-Bendixson, 25des residus, 55
variete, 145
zone morte, 44





























