Embed Size (px)
Citation preview
http://al9ahira.com/
Itinéraire d'accès à Al9ahira (point B sur la carte) en partant de la Place Ibéria
SciencesIndustriellespourl’Ingénieur 1/20 TournezlapageS.V.P.
CONCOURSNATIONALCOMMUNSESSION:2014 FILIERES:MP&PSI
EPREUVEDESCIENCESINDUSTRIELLESPOURL’INGENIEUR
ELEMENTSDECORRECTIONROBOTDETRAITEAUTOMATIQUEASTRONAUTA3
3.Etudefonctionnellepartielleexterneetimplantationdurobot
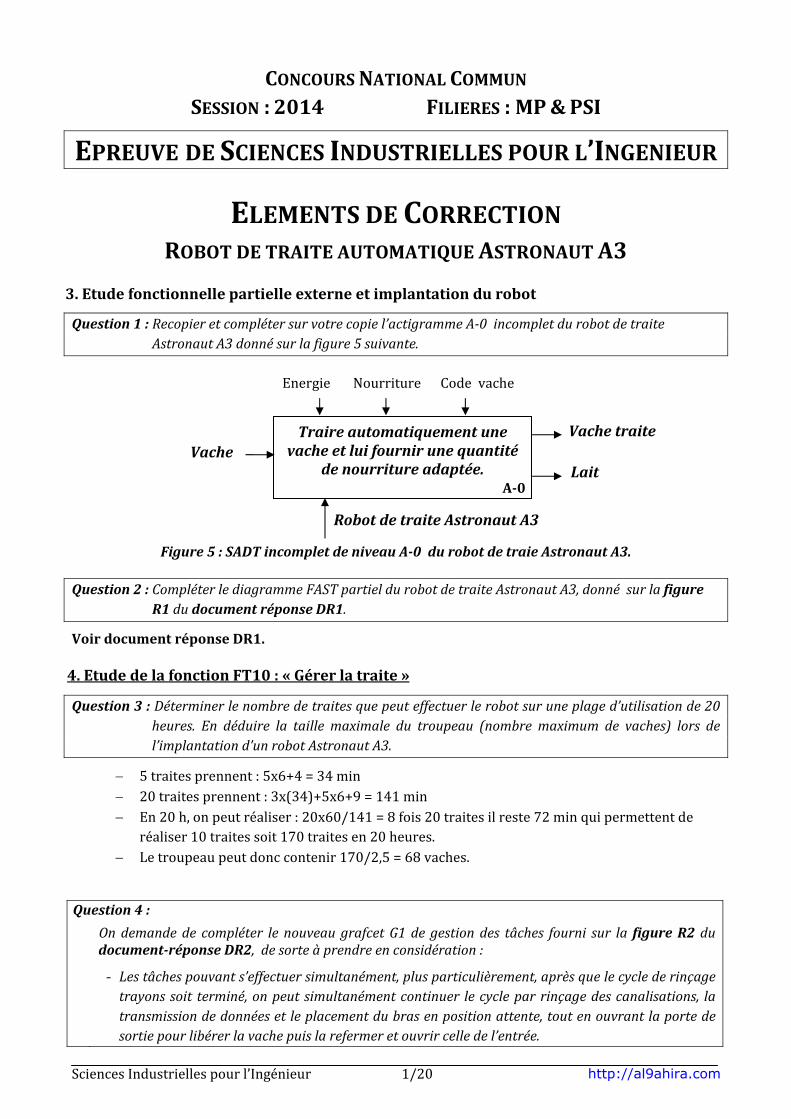
Question1:Recopieretcomplétersurvotrecopiel’actigrammeA‐0incompletdurobotdetraiteAstronautA3donnésurlafigure5suivante.
Figure5:SADTincompletdeniveauA‐0durobotdetraieAstronautA3.
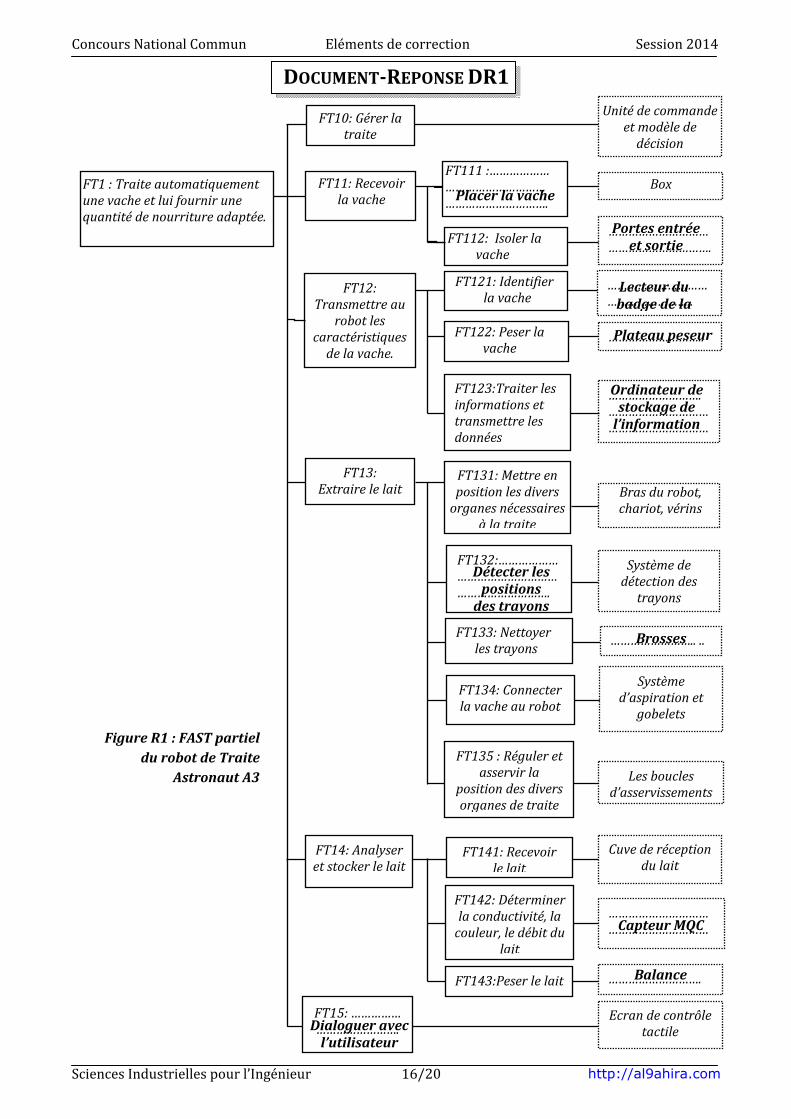
Question2:CompléterlediagrammeFASTpartieldurobotdetraiteAstronautA3,donnésurlafigureR1dudocumentréponseDR1.
VoirdocumentréponseDR1.
4.EtudedelafonctionFT10:«Gérerlatraite»
Question3:Déterminerlenombredetraitesquepeuteffectuerlerobotsuruneplaged’utilisationde20heures. En déduire la taillemaximale du troupeau (nombremaximum de vaches) lors del’implantationd’unrobotAstronautA3.
5traitesprennent:5x6+4=34min 20traitesprennent:3x(34)+5x6+9=141min En20h,onpeutréaliser:20x60/141=8fois20traitesilreste72minquipermettentde
réaliser10traitessoit170traitesen20heures. Letroupeaupeutdonccontenir170/2,5=68vaches.
Question4:
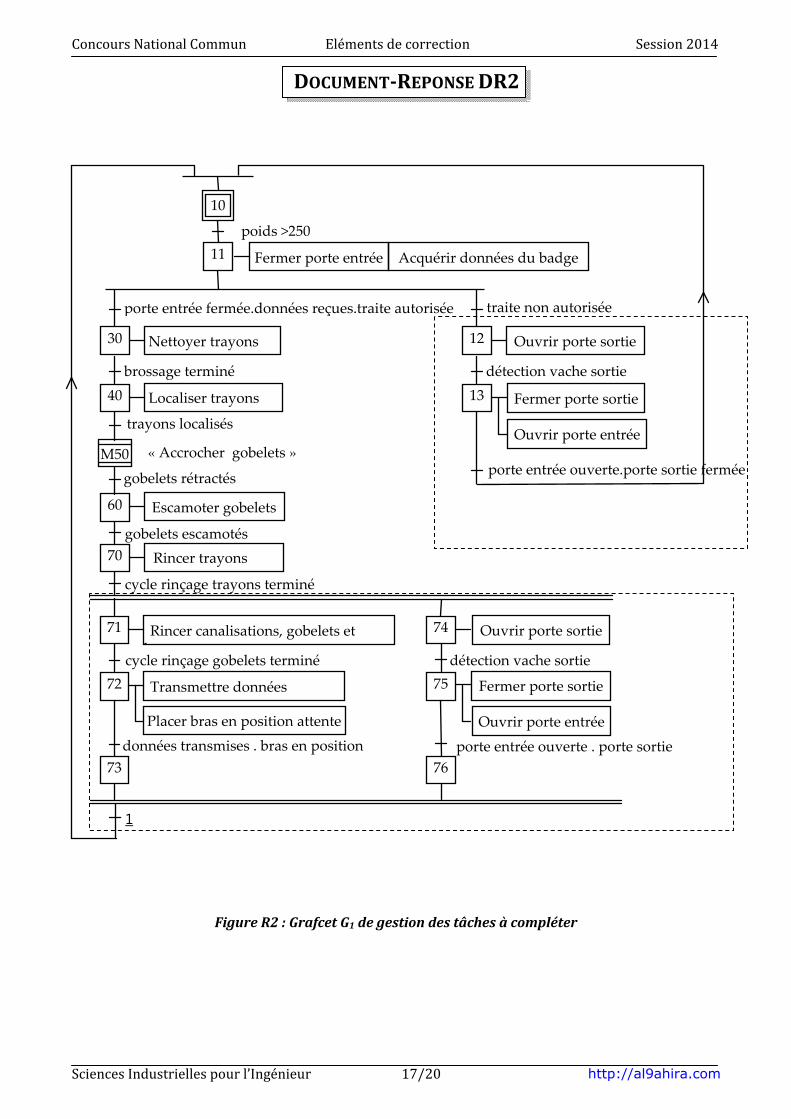
Ondemandedecompléter lenouveaugrafcetG1degestiondes tâches fourni sur la figureR2 dudocument‐réponseDR2,desorteàprendreenconsidération:
‐ Lestâchespouvants’effectuersimultanément,plusparticulièrement,aprèsquelecyclederinçagetrayonssoit terminé,onpeutsimultanémentcontinuer lecycleparrinçagedescanalisations, latransmissiondedonnéesetleplacementdubrasenpositionattente,toutenouvrantlaportedesortiepourlibérerlavachepuislarefermeretouvrircelledel’entrée.
Traireautomatiquementunevacheetluifournirunequantité
denourritureadaptée.
RobotdetraiteAstronautA3
Vachetraite
LaitVache
Energie NourritureCodevache
A‐0
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 2/20 TournezlapageS.V.P.
‐ Lecasoù l’intervalleentredeux traitesest insuffisantetqu’alors la traiteestnonautorisée: laportedesorties’ouvre,alors,libérantlavache.Dèssasortiedubox,laportedesortiesefermeetcelled’entrées’ouvre.
VoirDocument‐réponseDR2
5.EtudedelafonctionFT122«Peserlavache»
Question5: a) Ecrireleséquationsissuesdel’applicationduprincipefondamentaldelastatiqueàl’ensembleE=(plateau+vache)aupointM.
b) DéduirelepoidsPdelavacheetlescoordonnéesXGetYGdesoncentredegravitéG,enfonctiondesdonnées,faireensuitel’applicationnumérique.
a) PFSappliquéàl’ensembleE=(plateaupeseur+vache):
{ } { } { } { } { } { }( ) ( .) ( .) + ( .) + ( . ) 0M N KT E E T B Plat T B Plat T B Plat T Pes Vache = + =
{ } { } { }
0 0 0
0 0 0 0 0 0
( .) 0 0 , ( .) 0 0 et ( .) 0 0
0 0 0M N K
M N KM R N R K R
T B Plat T B Plat T B Plat
Z Z Z
ì ü ì ü ì üï ï ï ï ï ïï ï ï ï ï ïï ï ï ï ï ïï ï ï ï ï ï = = =í ý í ý í ýï ï ï ï ï ïï ï ï ï ï ïï ï ï ï ï ïï ï ï ï ï ïî þ î þ î þTRSprojetésur z
: 0K M NZ Z Z P+ + - =
TMSenM: . . . 0N KMN Z z MK Z z MG P z + - =
. . ( . . ) . ( . . . ) . 02N K G G
bb y Z z a x y Z z X x Y y h z P z + + - + + =
. . . . . . . . . . 02N K K G G
bb Z x a Z y Z x X P y Y P x - + + - =
[ ]. . . . . . . 02N K G K G
bb Z Z Y P x a Z X P yé ùê ú + - + - + =ê úë û
D’où: . . . 02N K G
bb Z Z Y P+ - = et . . 0K Ga Z X P- + =
c) K M NP Z Z Z= + + AN: 600P daN=
. .K KG
K M N
a Z a ZX
P Z Z Z= =
+ +AN: 0,44GX m=
. . 2 . .2 2( )
N K N KG
K M N
b Z b Z b Z b ZY
P P Z Z Z+
= + =+ +
AN: 1,5GY m=
6.EtudedelafonctionFT131:«Mettreenpositionlesorganesnécessairesàlatraite»
6.1.Etudehyperstatique
Question6: a) Dresserlegraphedeliaisonsdubrasderobot.b) Donner,enspécifiantlesmouvementsconcernés,lesmobilitésutileetinternedu
système.
c) Calculerledegréd’hypersatismehdusystème.Quelleestl’influencedecettevaleurdehsurlaréalisationdusysème?
d) Danslecasoùlemécanismeesthyperstatique,proposerunesolutionpourlerendreisostatiquesachantqueseuleslesliaisonsenD,E,FetHpeuventêtremodifiées.
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 3/20 TournezlapageS.V.P.
a) Legraphedeliaisonsdubrasderobot:
b) Mobilité:m=mu+mi
Mobilitéutile:mu=2(lesmouvementsdetranslationdesdeuxvérinsV5etV6).
Mobilitéinterne:mi=0.
c) Degréd’hyperstatisme: – 2 6 2 ‐10 4c ch m E I x= + = + = .
Influencedeh:systèmerigidemaisnécéssite4contraintesdimensionnelleset/ougéomètriquesàrespecterlorsdesaréalisationpourquelesystèmepuisseêtremontéetfonctionner.
d) Solutionisostatique:
OnremplacelesliaisonsenD,E,FetHpardesliaisonssphériques.Eneffet:midevient4,doncm=6et – 6 6 2–18 0c ch m E I x= + = + = ,onobtientainsiunsystème
isostatique.
6.2.Etudecinématique
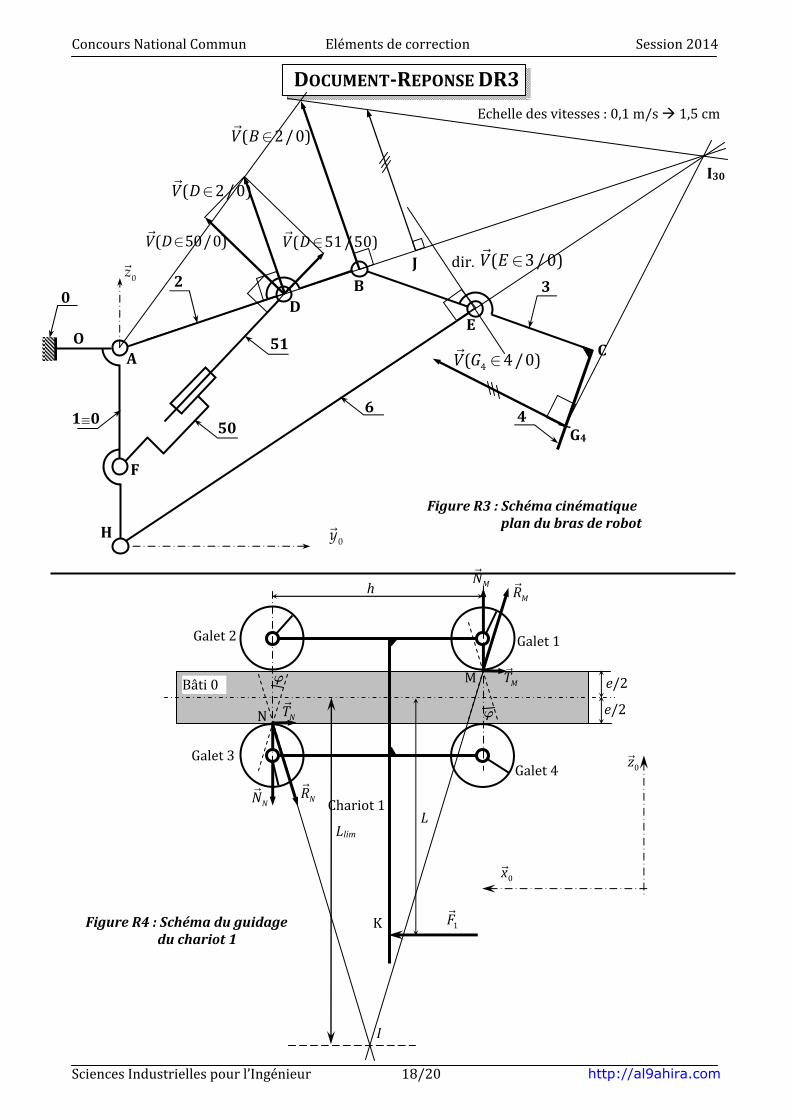
Question7: a) Représenter,àl’échelleproposée,levecteurvitesse Î( 51/50)V D .
b) ParcompositiondesvitessesenD,déterminerlesvecteursvitesses Î( 50/0)V D et
Î( 2/0)V D .
c) Déterminerlevecteurvitesse Î( 2/0)V B .
d) Déterminerladirectionduvecteurvitesse Î( 3/0)V E .
e) DéterminerlecentreinstantannéderotationI30dumouvementde(3)parrapportà(0).
f) Déterminerlevecteurvitesse Î
4( 4/0)V G ,donnersanorme.
a) Î( 51/50)V D estportéeparFD,voirDR3
b) ParcompositiondesvitessesenD:
Î( 2/0)V D =. ( 2/51)V DÎ
+ Î( 51/50)V D + Î
( 50/0)V D
Î( 2/0)V D ^(AD)carAºCIRdumouvementde1/0.
Î( 51/50)V D déjàtracée
Î( 50/0)V D ^(FD)carFºCIRdumouvementde50/0.
Entraçantleparallélogrammeondéterminecomplétementlesvitesses Î( 50/0)V D et Î
( 2/0)V D .
c) Vecteurvitesse Î( 2/0)V B .
( 2/0)V BÎ
^(AB)carAºCIRdumouvementde1/0.
20
3+4
Pivotd’axe0( , )A x
Pivotd’axe0( , )B x
50 51
60 61
Pivotd’axe
0( , )F x
Pivotd’axe
0( , )D x
Pivotd’axe
0( , )E x
Pivotd’axe
0( , )H x
Pivotglissantd’axe 5( , )D y
Pivotglissantd’axe 6( , )E y
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 4/20 TournezlapageS.V.P.
Lavitessevarielinéairementlelongde(ADE),d’où Î( 2/0)V B .
d) Directionduvecteurvitesse Î( 3/0)V E .
Î( 3/0)V E = ( 3/6)V EÎ
+ ( 6/0)V EÎ
^(HE)carHºCIRdumouvementde6/0.
e) CentreinstantannéderotationI30dumouvementde(3)parrapportà(0).
Ona: ( 3/0) ( 3/2)V B V BÎ = Î
( 2/0)V B+ Î
I30=(^ ( 3/0)V BÎ
)Ç(^ Î( 3/0)V E )c.à.d.I30=(AB)Ç(HE).
Oubienenfaisantusageduthéorèmedes3plansglissants:I30=(I32I20)Ç(I36I60)c.à.d.I30=(BA)Ç(EH)
f) Vecteurvitesse Î
4( 4/0)V G
4 30 4( 4/0) ( )V G I GÎ ^
SoitJlepointde 30( )I B telque:I30B’=I30G4,alors: 4( 4/0) ( 3/0)Î = Î V G V J ;
Lavitessevarielinéairementlelongde(I30JB),d’où: ( 3/0)ÎV J et Î
4( 4/0)V G .
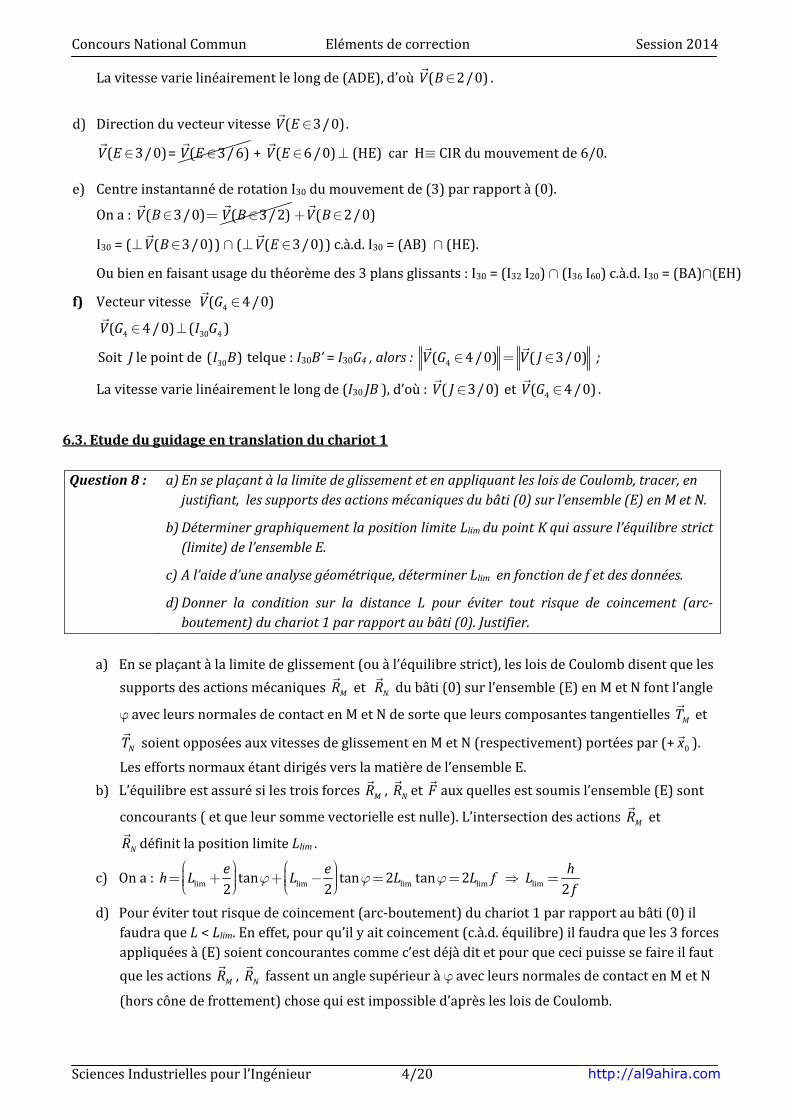
6.3.Etudeduguidageentranslationduchariot1Question8: a) EnseplaçantàlalimitedeglissementetenappliquantlesloisdeCoulomb,tracer,en
justifiant,lessupportsdesactionsmécaniquesdubâti(0)surl’ensemble(E)enMetN.
b) DéterminergraphiquementlapositionlimiteLlimdupointKquiassurel’équilibrestrict(limite)del’ensembleE.
c) Al’aided’uneanalysegéométrique,déterminerLlimenfonctiondefetdesdonnées.
d) Donner la condition sur la distance L pour éviter tout risque de coincement (arc‐boutement)duchariot1parrapportaubâti(0).Justifier.
a) Enseplaçantàlalimitedeglissement(ouàl’équilibrestrict),lesloisdeCoulombdisentqueles
supportsdesactionsmécaniques MRet NR
dubâti(0)surl’ensemble(E)enMetNfontl’angle
javecleursnormalesdecontactenMetNdesortequeleurscomposantestangentielles MTet
NTsoientopposéesauxvitessesdeglissementenMetN(respectivement)portéespar(+ 0x
).
Leseffortsnormauxétantdirigésverslamatièredel’ensembleE.
b) L’équilibreestassurésilestroisforces MR, NRetFauxquellesestsoumisl’ensemble(E)sont
concourants(etqueleursommevectorielleestnulle).L’intersectiondesactions MRet
NRdéfinitlapositionlimiteLlim.
c) Ona: lim lim lim limtan tan 2 tan 22 2e e
h L L L L fj j jæ ö æ ö÷ ÷ç ç= + + - = =÷ ÷ç ç÷ ÷ç çè ø è ø
lim 2h
Lf
=
d) Pourévitertoutrisquedecoincement(arc‐boutement)duchariot1parrapportaubâti(0)ilfaudraqueL<Llim.Eneffet,pourqu’ilyaitcoincement(c.à.d.équilibre)ilfaudraqueles3forcesappliquéesà(E)soientconcourantescommec’estdéjàditetpourquececipuissesefaireilfaut
quelesactions MR, NRfassentunanglesupérieuràjavecleursnormalesdecontactenMetN
(horscônedefrottement)chosequiestimpossibled’aprèslesloisdeCoulomb.
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 5/20 TournezlapageS.V.P.
6.4.Dimensionnementdesactionneurs
Question9: a) Déterminerlescomposantesduvecteurposition 3BG
ducentred’inertieG3dubras3.
b) Donner, en justifiant, la forme simplifiée de lamatrice d’inertie (B,3)I dans la base
0 3 3( , , )x y z
.
c) Exprimer en fonction des données, et dans la base 0 3 3( , , )x y z
, la matrice d’inertie
31(G ,31)I .Endéduirelamatriced'inertie (B,31)I danslabase 0 3 3( , , )x y z
.
d) Exprimer en fonction des données, et dans la base 0 3 3( , , )x y z
, lesmatrices d'inertie
32(G ,32)I et 33(G ,33)I .Endéduirelesmatricesd'inertie ( ,32)I B et ( ,33)I B .
e) Déduirel'expressiondelamatriced’inertie (B,3)I danslabase 0 3 3( , , )x y z
.
a) lescomposantes 3 3 3, G G GX Y et Z ducentred’inertieG3dubras3.
3 3 0 3 3 3 3
31 31 32 32 33 3331 32
31 3 32 0 3 3 33 0 3 331 32
. . .
1 .( )
( 2 )
1 .
( 2 ) 2 2 2 2 2 2 2
G G GBG X x Y y Z z
m BG m BG m BGm m
b a h b a h bm z m x y z m x y z
m m
= + +
= + ++
ì üæ ö æ öï ïï ï÷ ÷ç ç= - + - - + - - -í ý÷ ÷ç ç÷ ÷ç çï ïè ø è ø+ ï ïî þ
{ }( ){ }
31 3 32 3 331 32
31 32 3 32 331 32
1 ( )
( 2 ) 2
1 /2
( 2 )
bm z m hy bz
m m
m m bz m hym m
=- ⋅ + ++
=- ⋅ + ++
323 3 3
3
. . .2
m bBG h y z
m=- -
D’où; 323 3 3
3
0; ; 2G G G
m h bX Y Z
m= =- =-
b) Formesimplifiéedelamatriced’inertie ( ,3)I B .
Lagéométriedubrasintermédiaire3présenteunplandesymétrie 3 3( , , )B y z
,donc:
0 3 3
3
3 3
3 3 ( , , )
0 0
( ,3) 0
0x y z
A
I B B D
D C
æ ö÷ç ÷ç ÷ç ÷= -ç ÷ç ÷ç ÷÷ç -è ø
c) Matriced’inertie 31(G ,31)I et ( ,31)I B
æ ö÷ç ÷ç ÷ç ÷= +ç ÷ç ÷ç ÷÷ç ÷çè ø 0 3 3
2
2 23131
2
( , , )
0 0
( ,31) 0 012
0 0x y z
bm
I G a b
a;
D’aprèsHuygensona: { }31 31 31( ,31) ( ,31) ( , , )I B I G I B G m= +
Etpuisque: 31 32b
BG z=-
,alors: { }
0 3 3
231
231 31 31
( , , )
/ 4 0 0
( , , ) 0 /4 0
0 0 0x y z
m b
I B G m m b
æ ö÷ç ÷ç ÷ç ÷=ç ÷ç ÷ç ÷÷ç ÷çè ø
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 6/20 TournezlapageS.V.P.
D’où:
0 3 3
2
31
2 2
31
2
31( , , )
0 03
( ,31) 0 012 3
0 012 x y z
bm
a bI B m
am
æ ö÷ç ÷ç ÷ç ÷ç ÷ç ÷ç æ ö ÷÷ç ÷ç ÷ç ÷= +ç ÷÷ç ç ÷÷çç è ø ÷ç ÷ç ÷ç ÷ç ÷÷ç ÷ç ÷è ø
d) Matricesd’inertie: 32(G ,32)I , 33(G ,33)I , ( ,32)I B et ( ,33)I B .
0 3 3
2 2
23232 33
2
( , , )
0 0
( ,32) ( ,33) 0 012
0 0x y z
h bm
I G I G b
h
æ ö+ ÷ç ÷ç ÷ç ÷= = ç ÷ç ÷ç ÷÷ç ÷çè ø
Ona: 32 0 3 3/2. /2. /2.BG a x h y b z= - -
et 32 0 3 3/2. /2. /2.BG a x h y b z=- - -
Donc:
( )
( )
( )0 3 3
2 2 2 232 3232 32
2 2 232 3232 32
2 2 232 3232 32
( , , )
( )12 4 4 4
( ,32)4 12 4 4
4 4 12 4 x y z
m m ah abh b h b m m
m mah bhI B m b a b m
m mab bhm m h a h
æ ö÷ç + + + ÷ç ÷ç ÷ç ÷ç ÷ç ÷÷ç ÷ç= + + - ÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷- + + ÷ç ÷ç ÷çè ø
0 3 3
2 23232 32
2 2
32 32 32
2 2
32 32 32( , , )
( )3 4 4
( ,32)4 4 3 4
4 4 4 3 x y z
m ah abh b m m
ah a b bhI B m m m
ab bh a hm m m
æ ö÷ç + ÷ç ÷ç ÷ç ÷ç ÷ç ÷æ ö ÷ç ÷ ÷çç ÷= + - ÷çç ÷ ÷çç è ø ÷ç ÷ç ÷ç ÷æ öç ÷÷ç ÷ç ÷÷ç - +ç ÷÷ç ç ÷ç è øè ø
Demême:
0 3 3
2 23333 33
2 2
33 33 33
2 2
33 33 33( , , )
( )3 4 4
( ,33)4 4 3 4
4 4 4 3 x y z
m ah abh b m m
ah a b bhI B m m m
ab bh a hm m m
æ ö÷ç + - - ÷ç ÷ç ÷ç ÷ç ÷ç ÷æ ö ÷ç ÷ ÷çç ÷= - + - ÷çç ÷ ÷çç è ø ÷ç ÷ç ÷ç ÷æ öç ÷÷ç ÷ç ÷÷ç - - +ç ÷÷ç ç ÷ç è øè ø
e) Matriced’inertie ( ,3)I B
( ,3) ( ,31) ( ,32) ( ,33)I B I B I B I B= + +
0 3 3
3
3 3
3 3 ( , , )
0 0
( ,3) 0
0x y z
A
I B B D
D C
æ ö÷ç ÷ç ÷ç ÷= -ç ÷ç ÷ç ÷÷ç -è ø
http://al9ahira.comhttp://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 7/20 TournezlapageS.V.P.
avec:
2 2 2 2 22 232 33
3 31 3 31 32 33
2 2 2
3 31 32 33 3 32 33
( ) ; ( )3 3 12 3 4 3
( ) ; ( )12 4 3 4
m mb a b a bA m h b B m m m
a a h bhC m m m D m m
ì æ ö æ öï + ÷ ÷ï ç ç÷ ÷= + + = + + + +ï ç ç÷ ÷ççï ÷ è øçè øïïíï æ öï ÷çï ÷= + + + = +çï ÷çï è øïî
Question10: a) Déterminerletorseurcinétique,aupointB,dubras(3)danssonmouvement/àR0.
b) Déterminer laprojection sur 0xdesélémentsde réductiondu torseurcinétique,au
pointB,delatête(4)danssonmouvement/àR0.
a) Torseurcinétique,aupointB,dubras(3)danssonmouvement/àR0.
{ }
( )
( )
3 03 0
3 0
33 0 3 3 3 0 3 0 2 2 2 2 3 3
3 0 3 3 3 0
33 3 0 2 2 2 3 2
( / )( / )
( , / )
( / ) ( / ) . . . ( ).2
( , / ) . ( / ) ( ,3). 3/0
. (2
c
B
c
R S RS R
B S R
LR S R m V G S R m x x L z y
B S R m BG V B S R I B
Lm z x x L z A
s
q q q
s
q q q
ì üï ïï ï= í ýï ïï ïî þæ ö÷ç= Î = + + + ÷ç ÷çè ø
= Î + W
=- + + +
C
( )
3 0
3 33 2 2 3 0 3 2 3 0
1 13 2 3 3 3 2 2 3 0 3 3 32 2
)
.. sin ( )
2
( ) sin . .
x
m Lx y L x A x
A m L L x m L x y
q q q q
q q q q
=- - + +
é ù= + + -ë û
b) Torseurcinétique,aupointB,delatête(4)danssonmouvement/àR0.
{ }
( )( )( )
4 04 0
4 0
0 4 0 0 4 4 4 0 4
0 4 0 0 4 3 0 0 4 4 4 4 0
4 2 3 4 0 3 3 4 3 4 4 0
4 2 3
( / )( / )
( , / )
. ( / ) . ( / ) .
. ( , / ) . ( , / ) . ( / )
( ) . ( / )
( )
c
B
c
R S RS R
B S R
x R S R x m V G S R m x
x B S R x G S R x BG m V G S R
A m x L z L y V G S R
A m
s
s s
q q
q q
ì üï ïï ï= í ýï ïï ïî þ
= Î =
= + Î
= + - + Î
= + -
C
( ) ( )( ) ( )( )
4 4 3 3 3 0 2 2 2 3 2 3 3 4 2 3 3
2 24 2 3 4 3 4 2 3 2 2 3 3 4 3
. . . . ( ). ( ).
( ) ( ) . . sin cos
L z L y x x L z L y L z
A m L L L L L
q q q q q
q q q q q q q
- + + + - +
é ù= + + + + + -ê úë û
Ondonneleschémad’analysedusystèmesurlafigure9suivante:
Onrappellequetouteslesliaisonssontavecfrottementvisqueuxetquelesmassesdesvérinssontnégligées
Figure9:Schémad’analysedusystème
Vache
0 1
2
V1
3+4
V6
Glissièrededirection
0x
Pivotd’axe0( , )A x
Pivotd’axe0( , )B x
V5 Pesanteur
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 8/20 TournezlapageS.V.P.
Les lois demouvement étant connues on désire dimensionner les vérins V1, V5 et V6 permettant deréalisercesloisdemouvement.
Question11:Sansdévelopperlestermesdynamiques,écrireleséquationspermettantdedéterminerlesactionsmécaniquesdes vérins:F1,F5 etF6. Indiquer, clairement, le(s) système(s)à isoler,le(s)théorème(s)àutiliser.
DéterminationdeF1:Onisolel’ensembleE1=(S1+S2+S3+S4),
{ } { } { } { } { }1 1 0 1 1 0 1 00 1 0 01
1 1 1 1 1 0 1 1
( ). ( ). ( . ). 0( ). .
.
pR V S x F R Vache S x F R Pes E xR S S x f x
E E V S Vache S S S Pes E = =- = =-
= + + +
TRDenprojectionsur 0x:
0 1 0 1 01. ( / ) .D px R E R F F f x= - -
1 0 1 0 01. ( / ) .D pF x R E R F f x= + +
DéterminationdeF6:
Onisolel’ensembleE2=(S3+S4)
{ } { } { } { }6 62 3 0 23 3
2 2 2 3 6 3 2
( ). .
0
.
B
E
F yM S S x f
E E S S V S Pes Eq ì üï ï =- ï ïí ýï ïï ïî þ
= + +
TMDaupointBenprojectionsur 0x:
( )0 2 0 0 6 6 3 3 0 4 4 0 23 3. ( , / ) . . . . ( ) . . .x B E R x BE F y BG m g z BC CG m g z fd q= - - + -
( )30 2 0 3 6 6 2 3 3 2 3 4 3 2 3 4 2 3 23 3. ( , / ) cos( ) sin( ) sin( ) cos( ) .
2L
x B E R a F m g m g L L fd q q q q q q q q q q= - - - + + - + + + -
30 2 0 4 3 2 3 4 4 2 3 23 3
63 6 2 3
. ( , / ) in( ) cos( ) .2
cos( )
mx B E R m gL s m gL f
Fa
d q q q q q
q q q
æ ö÷ç+ + + - + +÷ç ÷çè ø=
- -
DéterminationdeF5:
Onisolel’ensembleE3=(S2+S3+S4)
{ } { } { } { } { }5 5 6 61 2 0 12 2
3 3 1 2 5 2 6 3 3
( ). .
0 0
.
A
D E
F y F yM S S x f
E E S S V S V S Pes Eq ì ü ì üï ï ï ï =- ï ï ï ïí ý í ýï ï ï ïï ï ï ïî þ î þ
= + + +
TMDaupointAenprojectionsur 0x:
( )0 3 0 0 5 5 6 6 2 2 0 3 3 0 4 4 0 12 2. ( , / ) . . . . . . . . . .x A E R x AD F y AE F y AG m g z AG m g z AG m g z fd q= + - - - -
( )
320 3 0 2 5 5 2 6 6 5 21 2 2 2 3 2 2 2 3
4 2 2 3 2 3 4 2 3
. ( , / ) sin( ) cos cos cos sin( )2 2
. . cos sin( ) cos( )
LLx A E R a F h F f m g m g L
m g L L L
d q q q q q q q q
q q q q q
æ ö÷ç= - + - - - + + ÷ç ÷÷çè ø
- + + - +
320 3 0 6 6 5 21 2 3 4 2 2 4 3 2 3 4 4 2 3
52 5 2
. ( , / ) cos cos sin( ) cos( )2 2
sin( )
mmx A E R h F f m m gL m gL m gL
Fa
d q q q q q q q
q q
æ öæ ö ÷÷ çç- + + + + + + + + +÷÷ çç ÷ ÷ç çè ø è ø=
-
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 9/20 TournezlapageS.V.P.
Question12:Encalculantlestermesdynamiques,déterminercomplétementF1etF6enfonctiondesdonnées.
DéterminationcomplètedeF1:
( ) ( )0 1 0 0 1 0 0 1 0 0 2 0 0 3 0 0 4 0
1 2 3 4
. ( / ) . ( / ) . ( / ) . ( / ) . ( / ) . ( / )
( ).
D C C C C C
d dx R E R x R E R x R S R x R S R x R S R x R S R
dt dtm m m m x
= = + + +
= + + +
( )1 1 2 3 4 01 . pF m m m m x f x F= + + + + +
DéterminationcomplètedeF6:
30 2 0 4 3 2 3 4 4 2 3 23 3
63 6 2 3
. ( , / ) in( ) cos( ) .2
cos( )
mx B E R m gL s m gL f
Fa
d q q q q q
q q q
æ ö÷ç+ + + - + +÷ç ÷çè ø=
- -
Avec:
( )
( ) ( )0
2 00 2 0 0 0 2 0 2 0
2 0 0 0 0 3 3 3 0 4 4 4 0
( , / ). ( , / ) . . ( / ) ( / )
( , / ). ( / ) .( ( / ) ( / )
E ER
d B E Rx B E R x x m V B R V G R
dt
dB E R x x V B R m V G S R m V G S R
dt
sd
s
æ ö÷ç= + ÷ç ÷çè ø
= + Î + Î
( ) ( )
( )
0 2 0 2 0 0 0 2 2 2 3 3 3 0 4 4 4 0
33 0 2 2 2 2 3 3
2 0 0 2 2 2
4 0 2 2 2 3 2 3 3 4 2
. ( , / ) ( , / ). . . .( ( / ) ( / )
. . . ( ).2( , / ). . . .
. . . ( ). (
dx B E R B E R x x L z m V G S R m V G S R
dtL
m x x L z ydB E R x L y
dtm x x L z L y L
d s q
q q qs q
q q q q
= + Î + Î
æ ö÷ç + + + +÷ç ÷çè ø= -
+ + + -
( )
( ) ( )( )
3 3
12 0 0 2 2 2 3 3 3 3 4 3 3 4 32
).
( , / ). ( ) cos cos sin
z
dB E R x L m L m L L
dt
q
s q q q q q q
æ ö÷ç ÷ç ÷ç ÷ç ÷ç ÷ç ÷÷ç ÷ç +è ø
= - + + +
( )
( ) ( )( )
2 0 0 3 0 0 4 0 0
21 13 3 3 2 3 3 3 2 2 32 2
2 24 2 3 4 3 4 2 3 2 2 3 3 4 3
( , / ). ( , / ). ( , / ).
( ) sin
( ) ( ) . . sin cos
B E R x B S R x B S R x
A m L m L L
A m L L L L L
s s s
q q q q
q q q q q q q
= +
é ù= + + + +ê úë ûé ù+ + + + + -ê úë û
( ) ( )
( )( )
2 2 21 10 2 0 3 4 3 3 4 3 4 2 3 3 3 3 4 3 3 4 3 2 22 2
213 3 3 4 2 3 3 4 3 2 22
. ( , / ) ( ) ( ) sin sin cos
cos cos sin
x B E R A A m L m L L m L m L L L
m L m L L L L
d q q q q q q
q q q q
é ù= + + + + + + + -ë û- + +
7.EtudedelafonctionFT135:«Réguleretasservirlapositiondesorganesdetraite»
Lecahierdeschargespartieldécrivantlesperformancesassociéesauchariot1estlesuivant:
Fonction Critères Niveauxetéventuelleflexibilité
FT135
AxeN°1(translationduchariot1parrapportaubâti)
Stabilitédel’axe Margedephase:MP³45°
Amortissementdel’axe Aucundépassementtransitoirepermis
Précisiondepositionnementdel’axe
‐ Insensibilitéàuneperturbationimpulsion.‐ Ecartstatique(écartenrégimepermanentsuiteàunéchelondeposition)nul.
Rapiditédel’axe Pulsationdecoupureà0dB(oudegainunité):wc0=10rad.s‐1
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 10/20 TournezlapageS.V.P.
7.1.Modélisationdessystèmesélectro‐hydrauliques
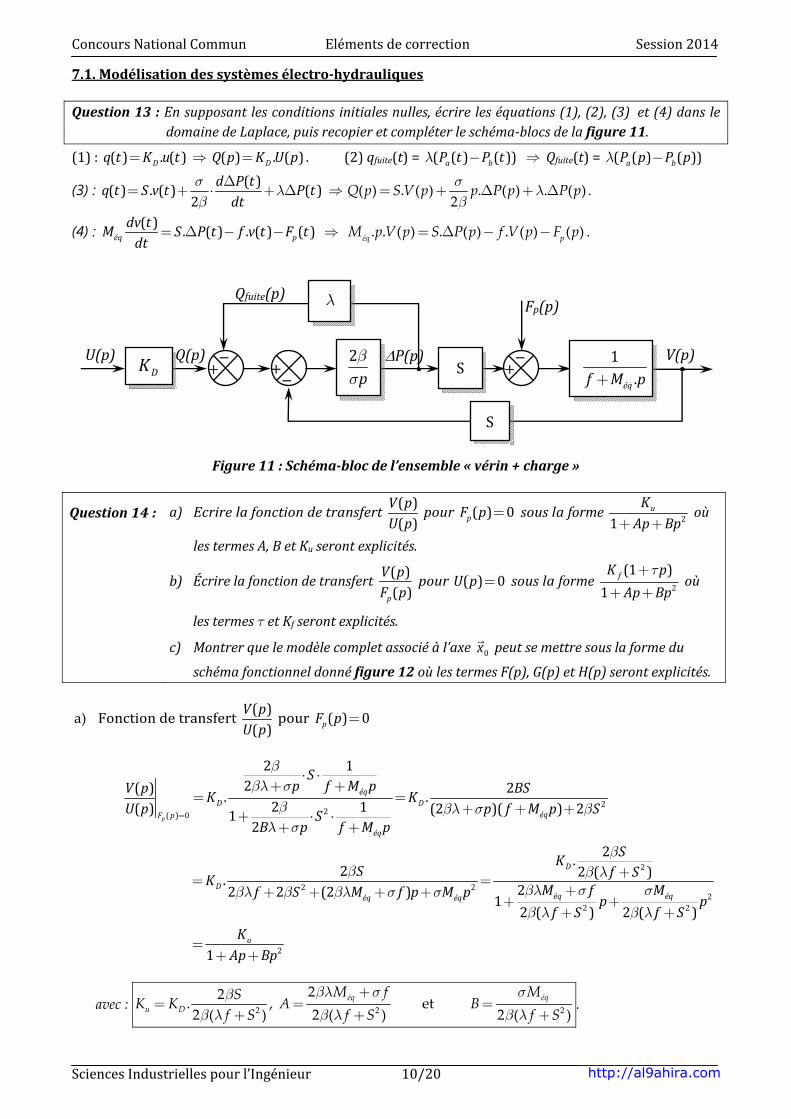
Question13:Ensupposantlesconditionsinitialesnulles,écrireleséquations(1),(2),(3)et(4)dans ledomainedeLaplace,puisrecopieretcompléterleschéma‐blocsdelafigure11.
(1): =( ) . ( )Dq t K u t ( ) . ( )DQ p K U p= .(2)qfuite(t)=l -( ( ) ( ))a bP t P t Qfuite(t)= ( ( ) ( ))a bP p P pl -
(3) : ( )( ) . ( ) ( )
2d P t
q t S v t P tdt
sl
bD
= + ⋅ + D s
lb
= + D + D( ) . ( ) . ( ) . ( )2
Q p S V p p P p P p .
(4) : ( ). ( ) . ( ) ( )éq p
dv tM S P t f v t F t
dt= D - - = D - -. . ( ) . ( ) . ( ) ( )
éq pM p V p S P p f V p F p .
Figure11:Schéma‐blocdel’ensemble«vérin+charge»
Question14: a) Ecrirelafonctiondetransfert( )( )V pU p
pour =( ) 0pF p souslaforme+ + 21
uKAp Bp
où
lestermesA,BetKuserontexplicités.
b) Écrirelafonctiondetransfert( )( )p
V pF p
pour =( ) 0U p souslaformet+
+ + 2
(1 )
1fK p
Ap Bpoù
lestermestetKfserontexplicités.
c) Montrerquelemodèlecompletassociéàl’axe0x peutsemettresouslaformedu
schémafonctionneldonnéfigure12oùlestermesF(p),G(p)etH(p)serontexplicités.
a) Fonctiondetransfert( )( )V pU p
pour =( ) 0pF p
22( ) 0
2
2 22
2 2
2
2 12( ) 2
. .2 1( ) (2 )( ) 21
2
2.
2 2 ( ).22 2 (2 )
12 ( ) 2 ( )
1
p
éqD D
éqF p
éq
D
Déq éqéq éq
u
Sp f M pV p BS
K KU p p f M p SS
B p f M p
SK
S f SKM f Mf S M f p M p
p pf S f S
KAp Bp
bbl s
b bl s bl s
bb b l
bl s sbl b bl s sb l b l
=
⋅ ⋅+ +
= =+ + ++ ⋅ ⋅
+ +
+= =++ + + +
+ ++ +
=+ +
avec : bl s sb
b l b l b l
+= = =
+ + +2 2 2
22. , et 2 ( ) 2 ( ) 2 ( )
éq éq
u D
M f MSK K A B
f S f S f S.
S
Q(p) P(p)
l
DK
U(p) V(p)
Fp(p)Qfuite(p)
S2pbs
1.éqf M p+
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 11/20 TournezlapageS.V.P.
b) Fonctiondetransfert( )( )p
V pF p
pour =( ) 0U p
22
( ) 0
2
2 22
2 2
2
1
( ) 22 1( ) (2 )( ) 21
2
22
22 ( )222 2 (2 )
12 ( ) 2 ( )
(1 )
1
éq
p éqU p
éq
éq éqéq éq
f
f M pV p pF p p f M p SS
p f M p
pf Sp
M f Mf S M f p M pp p
f S f S
K p
Ap Bp
bl sb bl s b
bl s
bl sbl
blb lbl sbl s sbl b bl s sb l b l
t
=
+ += =
+ + ++ ⋅ ⋅+ +
æ ö÷ç + ÷ç ÷÷ç+ è ø+= =
++ + + ++ +
+ ++
=+ +
Avec : 2
2et
22 ( )fK f Sbl s
tblb l
= =+
.
c) D’aprèsleschéma‐blocdelafigure12ona: ( ) ( ). ( ). ( ) ( ). ( ). ( )pV p H p G p U p H p F p F p= -
Donc: 2( ). ( )1
uKH p G pAp Bp
=+ +
et 2
(1 )( ). ( )
1fK p
H p F pAp Bp
t+=
+ +.
D’où : 2
1( )
1H p
Ap Bp=
+ +, ( ) uG p K= et ( ) (1 )fF p K pt= + .
Question15: a) Mettrelafonctiondetransfert( )( )V pU p
sousforme: 2
2
( )( ) 2
1
u
n n
KV pU p p
px
w w
=+ +
,
Donnerlesexpressionsdexetwn enfonctiondeAetB.
b) DonnerlavaleurdexpourquelaréponseenvitesseàunéchelondetensionU0soitla
plusrapidepossiblesansqu’ilyaitdépassement
c) Enfaisantusagedel’abaquedelafigure13,déterminerlavaleurdewn donnantun
tempsderéponseà5%égalà0,5s.
d) DéterminerlavaleurdugainKuassurantunevitesseenrégimepermanentde50m/spourunéchelondetensionU0=10Venl’absencedelaperturbation.
e) Enl’absencedelatensionU(p),déterminerlapositionenrégimepermanent ¥( )x du
chariot1suiteàuneperturbationimpulsiondeDirac: d=( ) . ( )pF t a t enfonctiondeKf.
f) Conclurequantlacapacitédelacommandeenchaînedirecteàsatisfairel’exigenceducahierdechargesentermesdesensibilitéàlaperturbation.
a) 2 2
2
( )( ) 1 2
1
u u
n n
K KV pU p Ap Bp p
px
w w
= =+ +
+ +
1et
2n
A
B Bw x= =
b) PourquelaréponseenvitesseàunéchelondetensionU0soitlaplusrapidepossiblesansqu’ilyaitdépassementilfautprendre 1x= .
c) D’aprèsl’abaque,pour 1x= ona: 5% . 5r nt w = 15%5/ 5/0,5 10 .n rt rad sw -= = = .
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 12/20 TournezlapageS.V.P.
d) Enl’absencedelaperturbation,lavitesseenrégimepermanent
1 10 0( ) . ( )/ 50/10 5 . .v K U K v U m s V- -¥ = = ¥ = = .
Donc: 2
( ) 5( ) (1 0,1. )V pU p p
=+
e) Enl’absencedelatensionU(p),Lapositionenrégimepermanentest:
20 0 0
(1 )1( ) lim ( ) lim . ( ). ( ). ( ) lim .1
1f
p fp p p
K px pX p p F p H p F p K
p Ap Bp
t
+¥ = = = =
+ +
f) Lacommandeenchaînedirecteestdoncsensibleuneperturbationimpulsion.Ellenejamaissatisfairel’exigenceducahierdechargesentermesdesensibilitéàlaperturbationimpulsion.
7.3.Synthèsedelaloidecommandedédiéeàl’asservissementetàlarégulationdelapositionduchariot1
7.3.1.Systèmeasservinoncorrigé
Lapremièreétudeproposées’intéresseàl’étudedelacommandeenboucleferméenoncorrigé:C(p)=1.
Question16: a) Déterminerlafonctiondetransfertenboucleouverte ( )BOH p ensupposant ( ) 0pF p = .
b) Déterminerlafonctiondetransfertenbouclefermée: =( ) ( )/ ( )BF CH p X p X p .
c) En supposant ( ) 0CX p = , déterminer la fonction de sensibilité vis‐à‐vis de la
perturbationdéfiniepar: e=( ) ( )/ ( )préc pH p p F p .
a) Fonctiondetransfertenboucleouverte: 2
1 5( ) ( ). ( ). ( ).
(1 0,1 )BOH p C p G p H pp p p
= =+
b) Fonctiondetransfertenbouclefermée:
2 2
( )( ) 5 1( )
( ) 1 ( ) 5 (1 0,1 ) 1 0,2 0,02BO
BFC BO
H pX pH p
X p H p p p p p= = = =
+ + + + +
c) Fonctiondesensibilitévis‐à‐visdelaperturbation:
2
2
2
2(1 0,2 )1( ). ( ).
( ) 2(1 0,2 )(1 0,1 )( )
5( ) 1 ( ) 5 (1 0,1 )1(1 0,1 )
précp BO
pF p H p
p pp p pH p
F p H p p pp p
e+
++= = = =+ + ++
+
Question17: a) Donnerl’écartenrégimepermanentdûàuneentréeéchelon: ( ) 0,01. ( )cx t u t= avec
( )u t lafonctiond’Heaviside.
b) Déterminerl’écartenrégimepermanentdûàuneperturbationdetypeimpulsiondeDirac: ( ) . ( )pF t a td= .
c) Conclurequantà la capacitéde la commandeboucléenon corrigéeà respecter lesspécificationsducahierdechargesentermesdeprécision.
a) Ecartenrégimepermanentdûàuneentréeéchelon:es=0carlaclassedeHBO(p)estégaleà1.
b) EcartenrégimepermanentdûàuneperturbationdetypeimpulsiondeDirac: ( ) . ( )pF t a td= .
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 13/20 TournezlapageS.V.P.
20 0 0
2(1 0,2 )( ) lim ( ) lim . ( ). ( ) lim . .1 0
5 (1 0,1 )préc pp p p
pp p p H p F p p
p pe e
+¥ = = = =
+ +
Résultatqu’onpourraitécriredirectementvuqu’unecommandeasservieesttoujoursinsensibleauxperturbationsimpulsionsetceciqu’ilyaitprésenced’intégrationdanslaboucleoupas.
c) Onconclutquelacommandeboucléenoncorrigéeestcapablederespecterlesspécificationsducahierdechargesentermesdeprécision.
Question18: a) SurlafigureR5dudocument‐réponseDR4,placeretrelever:
lapulsationw 0c decoupureà0dB.
lesmargesdegainetdephase.
b) Lacommandeboucléenoncorrigéepermet‐ellederespecterlescritèresducahierdechargesrelatifsàlarapidité,àlastabilitéetl’amortissementdel’axe?
a) Voirdocument‐réponseDR4
lapulsationw 0c =4rad/s.
lesmargesdegainetdephase:MG=12dBetMP=45°.
b) Lacommandeboucléenoncorrigéepermetderespecterlecritèreducahierdechargesrelatifà
lastabilité(MP³45°)maispasceuxdelarapidité(w 0c <10rad/s)etdel’amortissementde
l’axe(présencededépassementdelavaleurfinale)
7.3.2.Correctionàactionproportionnelle
Question19: a) ApartirdelafigureR5dudocument‐réponseDR4,déterminerlavaleurKc1deKcpermettantderespecterlaspécificationderapiditéexigéparleCdCF.
b) TracersurlafigureR5dudocument‐réponseDR4lesdiagrammesdegainetdephasedusystèmecorrigéparKc1.
c) Releverlesnouvellesvaleursdesmargesdegainetdephase.
d) Auvudesrésultatsprécédents,est‐ilpossibledevaliderlechoixd’uncorrecteuràactionproportionnel?Commenter.
a) ValeurKc1deKcpermettantderespecterlaspécificationderapiditéexigéeparleCdCF.
Ilfaudradéplacerlelieudegainverslehautpourlefairecouperavecl’axe0dBenw=10rad/s.
Lavaleurdedéplacementest20logKc1=12dBc.à.d.Kc1=1012/20=4.
b) Voirledocument‐réponse(lelieudephaseresteinchangé).
c) Nouvellesvaleursdesmargesdegainetdephase:MG=0dBetMP=0°lesystèmeestdevenujusteinstable.
d) Il n’est pas possible de valider le choix d’un correcteur à actionproportionnel car onnepeutsatisfaireàlafoisauxexigencesderapiditéetdestabilité:
PourKc=1,lecritèredestabilitéestsatisfaitmaispasceluidelarapidité;
PourKc=Kc1,lecritèrederapiditéestsatisfaitmaispasceluidelastabilité.
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 14/20 TournezlapageS.V.P.
Question20:Apartirdelafigure15,justifierpourquoiest‐ilpossibled’approcherlesystèmeasserviparun système de deuxième ordre et déterminer ses paramètres caractéristiques:
, BF nBF BFK etw x .
Ilestpossibled’approcherlesystèmeasserviparunsystèmededeuxièmeordredontlecoefficientd’amortissementestinférieurà1,carlatangenteàl’origineesthorizontaleestquelaréponseestoscillante.
Paramètrescaractéristiques:
Lapositionenrégimepermanentest: ( ) 0,01. BFx K¥ = etonrelèvesurlegraphe ( ) 0,01x m¥ = ,
donc: 1BFK = .
Le1erdépassementrelatifest 11 2 2 2
1
ln(D )D exp
1 ln (D )
pxx
x p
æ ö- ÷ç= =÷ç ÷ç ÷÷ç - +è ø,onrelèvesurlegraphe
1
0,0125 0,01D 0,25
0,01-
= = ,donc: 0,4x= .
Le1erdépassementalieuàlademipseudo‐période.
pn2 2
n
T0,65s
2 1 0,65 1
p pw
w x x= = =
- -,donc: 1
n 5,3rad.sw - .
7.3.3Correctionàactionsproportionnelle‐dérivée
Question21:SurlafigureR6dudocument‐réponseDR4,tracerlesdiagrammesasymptotiquesetl’alluredesdiagrammesréelsdeBodeducorrecteur 2( )C p .
VoirDocument‐réponseDR4.
Question22:Déterminerlafonctiondetransfertenboucleouvertecorrigé 2( )BOH p ,donnersonordre,sa
classeetsongainstatique.
2 2 2
1 0,24. 5 8,25(1 0,24 )( ) 1,65
1 0,04. (1 0,1 ) (1 0,04. )(1 0,1 )BO
p pH p
p p p p p p+ +
= ⋅ ⋅ =+ + + +
Sonordren=4,saclassea=1etsongainstatiqueKBO2=8,25.
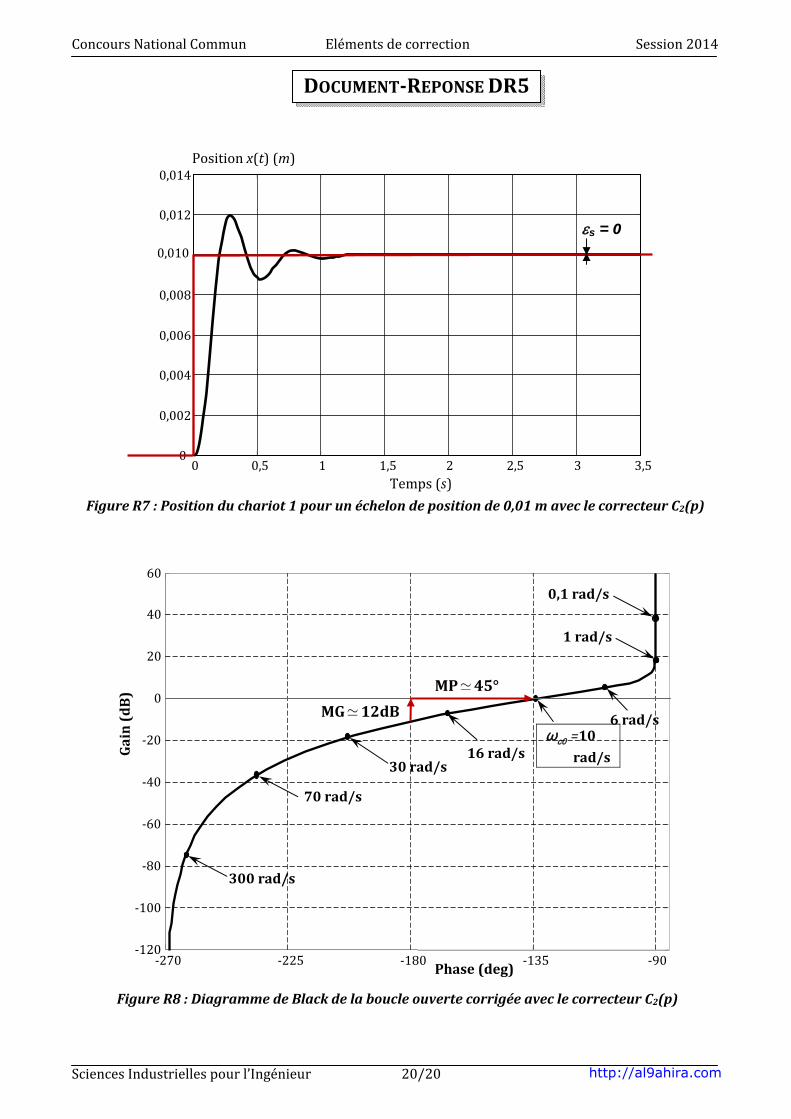
Question23: a) Représenter puis relever les écarts en régime permanent respectivement à uneperturbationimpulsion ( ) . ( )pF t a td= etàunéchelondeposition ( ) 0,01. ( )cx t u t= .
b) Représenter puis relever sur le diagramme deBlack de la figureR8 dudocument‐réponseDR5,lapulsationw 0c decoupureà0dB,lesmargesdephaseetdegain.
c) Au vu des résultats précédents et des spécifications du cahier des charges, est‐ilpossibledevaliderlecorrecteuràactionproportionnelle‐dérivée 2( )C p ?Commenter.
a) ‐L’écartenrégimepermanentàuneperturbationimpulsion ( ) . ( )pF t a td= estnulcarlesystème
estbouclé.
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 15/20 TournezlapageS.V.P.
‐ L’écart en régime permanent à un échelon de position ( ) 0,01. ( )cx t u t= est aussi nul car la
boucleprésenteuneintégration.Voirdocument‐réponseDR5
b) ‐Pulsationdecoupureà0dB: 10 10 .c rad sw -= .
‐Margesdephaseetdegain:MP 45 etMG 12dB.
c) Cecorrecteurpermetlasatisfactiondescritèresducahierdechargesentermesdeprécision,rapiditéetdestabilitémaispasceluidel’amortissementdel’axe(onvoitbiensurlegraphedepositionlaprésenced’ndépassementtransitoire.Onnepeutpasalorslevalider.
Question24: a) ReleversurlediagrammedeBodedelafigure21,lapulsationw 0c decoupureà0dB
ainsiquelesmargesdegainetdephase.
b) Cettecommandepermet‐ellederespecterlescritèresdeperformancesdéfinisparlecahierdescharges?Commenter.
a) ‐Pulsationdecoupureà0dB: 10 10 .c rad sw -= .
‐Margesdephaseetdegain:MP 77= etMG=40dB.
b) Cettecommandepermetderespectertouslescritèresdeperformancesdéfinisparlecahierdescharges,eneffet:
–Pourlaprécision:lesécartsdusàlaperturbationimpulsionetàl’entréeéchelonsonttoutdeuxnuls.
–Pourlarapidité: 10 10 .c rad sw -= ;
–Pourlastabilité:MP>45°;
–Pourl’amortissementdel’axe:onvoitbiensurlegraphed’évolutiondelapositionqu’iln’yapasdépassementtransitoire.
…Fin
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 16/20 Document‐‐réponse
DOCUMENT‐REPONSEDR1
FigureR1:FASTpartieldurobotdeTraite
AstronautA3
Ecrandecontrôletactile
FT1:Traiteautomatiquementunevacheetluifournirunequantitédenourritureadaptée.
FT11:Recevoirlavache
Box
FT12:Transmettreau
robotlescaractéristiquesdelavache.
Brasdurobot,chariot,vérins
Cuvederéceptiondulait
……………………….
FT134:Connecterlavacheaurobot
FT133:Nettoyerlestrayons
FT132:………………………………………………………………….
FT123:Traiterlesinformationsettransmettrelesdonnées
FT122:Peserlavache
FT121:Identifierlavache
FT112:Isolerlavache
FT13:Extrairelelait
FT15:………………………………….
FT143:Peserlelait
FT142:Déterminerlaconductivité,lacouleur,ledébitdu
lait
FT111:…………………………………………………………………….
FT10:Gérerlatraite
Unitédecommandeetmodèlededécision
…………………………………………………….
………………………………………………..
………………………..
……………………….……………………………………………………
……………………....
……………………………………………………
Systèmededétectiondestrayons
Systèmed’aspirationetgobelets
FT131:Mettreenpositionlesdiversorganesnécessaires
à la traite
Lesbouclesd’asservissements
FT135:Réguleretasservirla
positiondesdiversorganesdetraite
FT141:Recevoirle lait
FT14:Analyseretstockerlelait
Placerlavache
Portesentréeetsortie
Plateaupeseur
Lecteurdubadgedela
Ordinateurdestockagedel’information
Détecterlespositionsdestrayons
CapteurMQC
Brosses
Balance
Dialogueravecl’utilisateur
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 17/20 Document‐‐réponse
FigureR2:GrafcetG1degestiondestâchesàcompléter
DOCUMENT‐REPONSEDR2
porte entrée ouverte.porte sortie fermée
porte entrée ouverte . porte sortie
10
poids >250
Rincer canalisations, gobelets et b
cycle rinçage gobelets terminé détection vache sortie
Fermer porte entrée
porte entrée fermée.données reçues.traite autorisée
gobelets escamotés
trayons localisés
gobelets rétractés
brossage terminé
30
cycle rinçage trayons terminé
Transmettre données
Placer bras en position attente
Ouvrir porte sortie
traite non autorisée
détection vache sortie
12
Acquérir données du badge
Nettoyer trayons
Localiser trayons
« Accrocher gobelets »
Escamoter gobelets
Rincer trayons
Ouvrir porte sortie
Fermer porte sortie
Ouvrir porte entrée
Fermer porte sortie
Ouvrir porte entrée
40
60
70
71
72
74
75
13
11
M50
73 76
données transmises . bras en position
1
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 18/20 Document‐‐réponse
Echelledesvitesses:0,1m/s1,5cm
DOCUMENT‐REPONSEDR3
0y
FigureR3 :Schémacinématiqueplandubrasderobot
AO
F
H
G4
BD
E
C
1º0
2 3
4
51
650
0z
0
I30
Î( 51/50)V D Î
( 50/0)V D
Î
4( 4/0)V G
dir. Î( 3/0)V E
Î( 2/0)V B
( 2/0)V DÎ
J
FigureR4:Schémaduguidageduchariot1
0z
0x
MN
Llim
NT
NN
NR
MT
MR
I
1F
M
N
Galet4
Galet1Galet2
Galet3
Bâti0
h
e/2
e/2
L
K
j
Chariot1
j
http://al9ahira.com

ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 19/20 Document‐‐réponse
FigureR5:DiagrammedeBodedelaboucleouvertedusystèmeasservinoncorrigé
FigureR6:DiagrammedeBodeducorrecteuràactionsproportionnelleetdérivéeC2(p)
DOCUMENT‐REPONSEDR4
0
4
8
12
16
20
Gain(dB)
Phase(deg)
10‐1 100 101 102 1030
45
90
Pulsation(rad/s)
Phase(deg)
Gain(dB)
10‐
100
101
102
103
‐270
‐225
‐180
‐135
‐90
Pulsation(rad/s)
‐120
‐100
‐80
‐60
‐40
‐20
0
20
40
MP=45°
MG=12dB
wc0 wc0’LieudugaindusystèmecorrigéavecKc=Kc1
MêmelieudelaphasepourlesystèmecorrigéavecKc=Kc1etnoncorrigé
20logKc1=12dB
10,04
20log1,65
10,24
http://al9ahira.com
ConcoursNationalCommun Elémentsdecorrection Session2014
SciencesIndustriellespourl’Ingénieur 20/20 Document‐‐réponse
FigureR7:Positionduchariot1pourunéchelondepositionde0,01maveclecorrecteurC2(p)
FigureR8:DiagrammedeBlackdelaboucleouvertecorrigéeaveclecorrecteurC2(p)
Temps(s)0 0,5 1 1,5 2 2,5 3 3,5
0
0,002
0,004
0,006
0,008
0,010
0,012
0,014Positionx(t)(m)
Phase(deg)‐270 ‐225 ‐180 ‐135 ‐90
‐120
‐100
‐80
‐60
‐40
‐20
0
20
40
60
300rad/s
70rad/s
30rad/s16rad/s
c0ω =10
rad/s
6rad/s
1rad/s
0,1rad/s
Gain(dB)
DOCUMENT‐REPONSEDR5
MP45°
MG12dB
s = 0
http://al9ahira.com
Rien ne saurait remplacer un livre en papier
Des livres de prépas très joliment imprimés
à des prix très accessibles
Al9ahira en ligne En 3 clics seulement, on livre, tu étudies
La qualité est notre point fort.
Vos commentaires sont importants pour nous Pour toute information, n’hésitez pas à nous contacter
mailto:[email protected]
http://al9ahira.com/ Tél : 0539/34 33 20
7, rue Égypte. Tanger





























