Embed Size (px)
DESCRIPTION
Circuit Simulation using Matrix Exponential Method. Shih-Hung Weng, Quan Chen and Chung-Kuan Cheng CSE Department, UC San Diego, CA 92130 Contact: [email protected]. Outline. Introduction Computation of Matrix Exponential Method Krylov Subspace Approximation Adaptive Time Step Control - PowerPoint PPT Presentation
Citation preview
Circuit Simulation using Matrix Exponential Method
Shih-Hung Weng, Quan Chen and Chung-Kuan ChengCSE Department, UC San Diego, CA 92130
Contact: [email protected]
1
Outline
• Introduction• Computation of Matrix Exponential Method
– Krylov Subspace Approximation– Adaptive Time Step Control
• Experimental Results• Conclusions
2
Circuit Simulation
• Numerical integration– Approximate with rational functions– Explicit: simplified computation vs. small time steps– Implicit: linear system derivation vs. large time steps
– Trade off between stability and performance• Time step of both methods still suffer from accuracy
– Truncation error from low-order rational approximation
• Method beyond low-order approximation?– Require: scalable and accurate for modern design
3
Statement of Problem• Linear circuit formulation
• Let A=-C-1G, b=C-1u, the analytical solution is
• Let input be piecewise linear
4
( ) ( ) ( )t t t Cx Gx u
( )( ) ( ) ( )t h
h t h
t
t h e t e e d
A A Ax x b
2
( ) ( )( ) ( ) ( ) ( )
h he e h t h tt h t t t
h
A AI A I b bx x Ax b
A A
Statement of Problem• Integration Methods
– Explicit (Forward Euler): eAh => (I+Ah) “Simpler” computation but smaller time
steps– Implicit (Backward Euler): eAh => (I-Ah)-1
Direct matrix solver (LU Decomp) with complexity O(n1.4) where n=#nodes
– Error derived from Taylor’s expansion
5
Statement of Problem
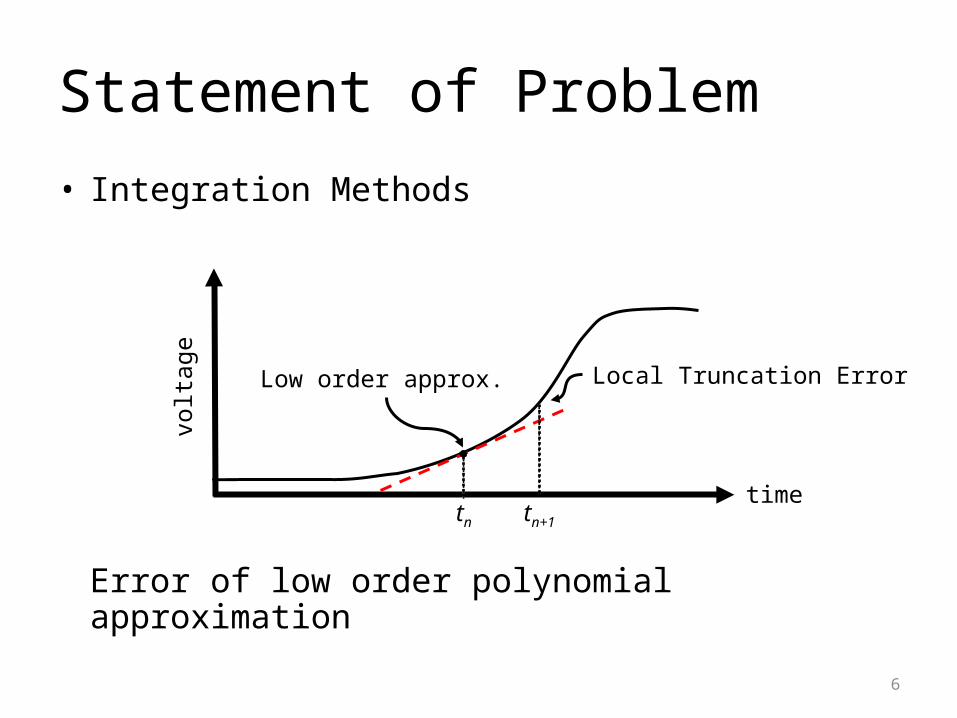
• Integration Methods
Error of low order polynomial approximation
6
volta
ge
timetn tn+1
Low order approx. Local Truncation Error
Approach• Parallel Processing: Avoid LU decomp matrix
solver• Matrix Exponential Operator:
– Stability: Good– Operation: Matrix vector multiplications
• Assumption– C-1v exits and is easy to derive– Regularization when C is singular
7
Matrix Exponential Method• Krylov subspace approximation
– Orthogonalization: Better conditions– High order polynomial
• Adaptive time step control– Dynamic order adjustment– Optimal tuning of parameters
• Better convergence with coefficient 1/k! at kth term eA= I + A + ½ A2 + … + 1/k! Ak +…(I-A)-1= I + A + A2 +…+ Ak +…
8
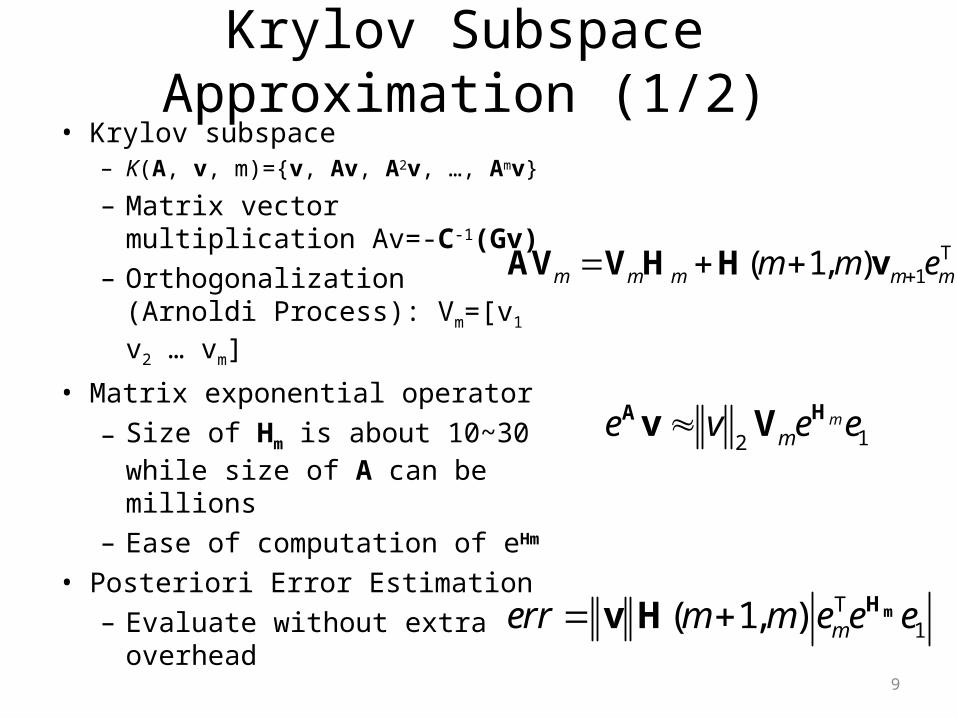
Krylov Subspace Approximation (1/2)• Krylov subspace
– K(A, v, m)={v, Av, A2v, …, Amv}
– Matrix vector multiplication Av=-C-1(Gv)
– Orthogonalization (Arnoldi Process): Vm=[v1 v2 … vm]
• Matrix exponential operator– Size of Hm is about 10~30 while
size of A can be millions– Ease of computation of eHm
• Posteriori Error Estimation – Evaluate without extra
overhead9
1( 1, )m m m m mm m e AV V H H v T
12m
me v e e HAv V
1( 1, ) merr m m e e e mHv H T

RC circuit of 500 nodes, random cap ranges 1e-11~1e-16, h = 1e-13
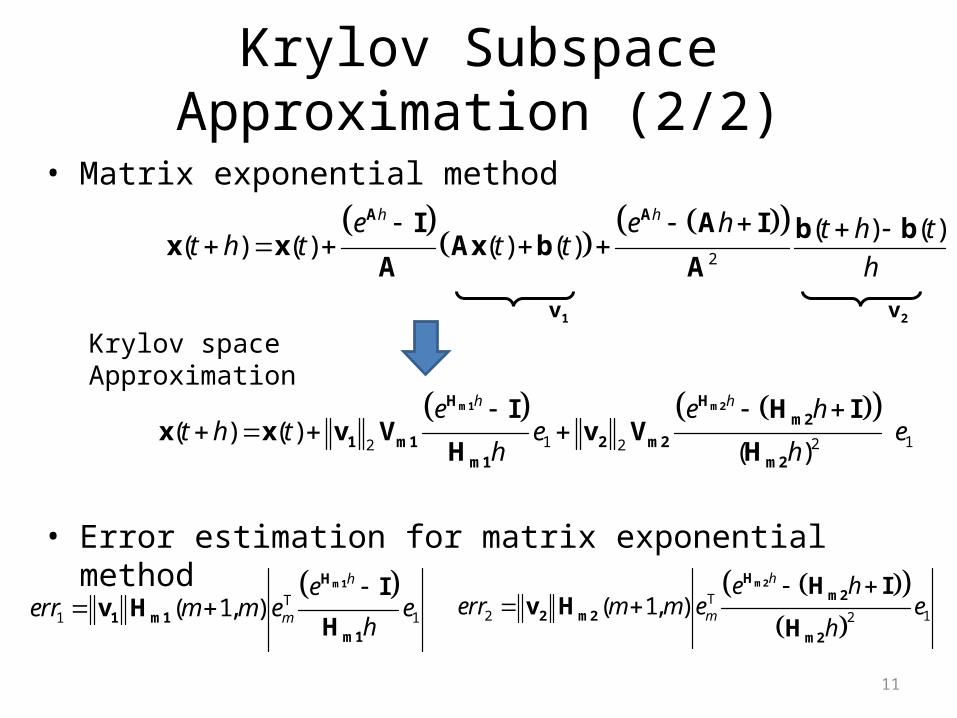
Krylov Subspace Approximation (2/2)
• Matrix exponential method
• Error estimation for matrix exponential method
11
1 1( 1, )
h
m
eerr m m e e
h
m1H
1 m1m1
Iv H
HT
2 12( 1, )h
m
e herr m m e e
h
m2Hm2
2 m2
m2
H Iv H
HT
1 122 2
( ) ( )( )
h he e ht h t e e
h h
m1 m2H Hm2
1 m1 2 m2m1 m2
I H Ix x v V v V
H H
2
( ) ( )( ) ( ) ( ) ( )
h he e h t h tt h t t t
h
A AI A I b bx x Ax b
A A
Krylov space Approximation
v1 v2
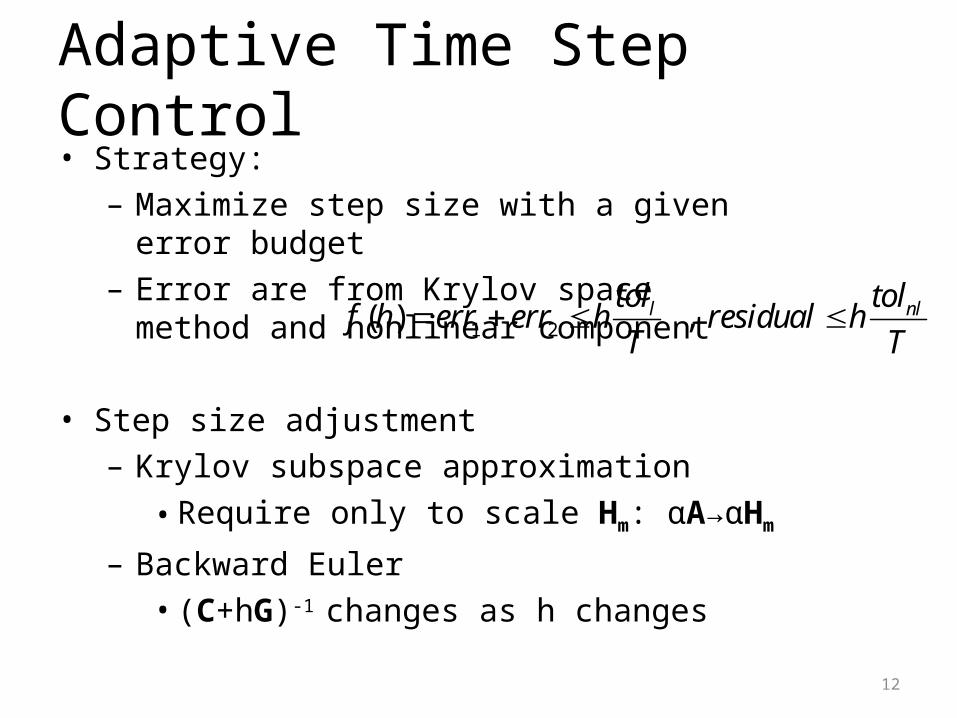
Adaptive Time Step Control• Strategy:
– Maximize step size with a given error budget– Error are from Krylov space method and
nonlinear component
• Step size adjustment– Krylov subspace approximation
• Require only to scale Hm: αA→αHm
– Backward Euler• (C+hG)-1 changes as h changes
12
1 2( ) , l nltol tolf h err err h residual h
T T
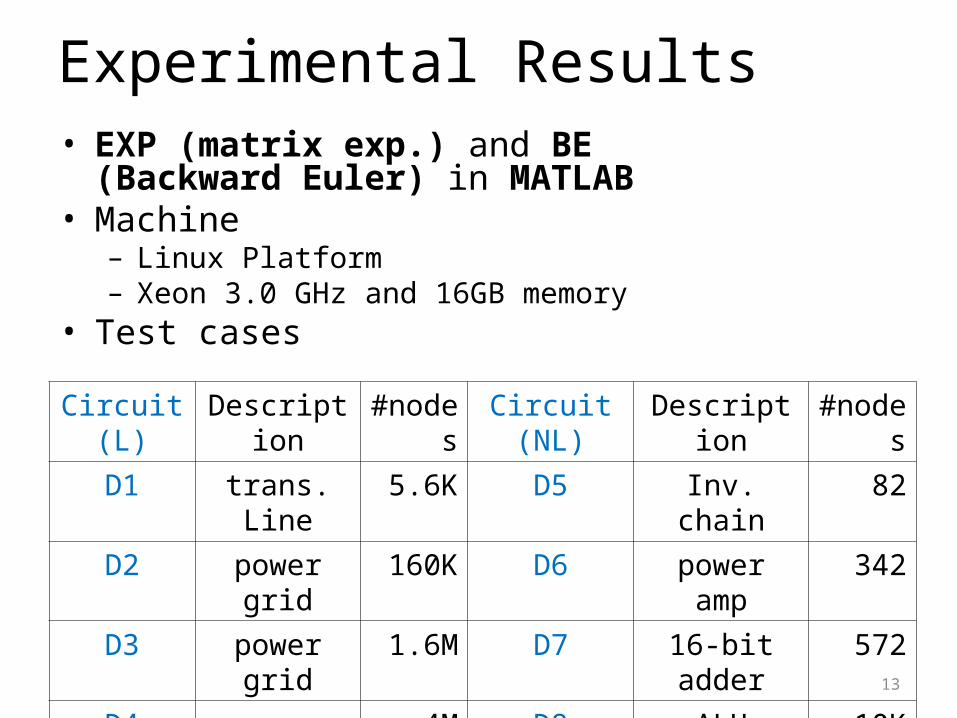
Experimental Results• EXP (matrix exp.) and BE (Backward Euler) in
MATLAB• Machine
– Linux Platform – Xeon 3.0 GHz and 16GB memory
• Test cases
13
Circuit (L) Description #nodes Circuit (NL) Description #nodes
D1 trans. Line 5.6K D5 Inv. chain 82
D2 power grid 160K D6 power amp 342
D3 power grid 1.6M D7 16-bit adder 572
D4 power grid 4M D8 ALU 10K
14
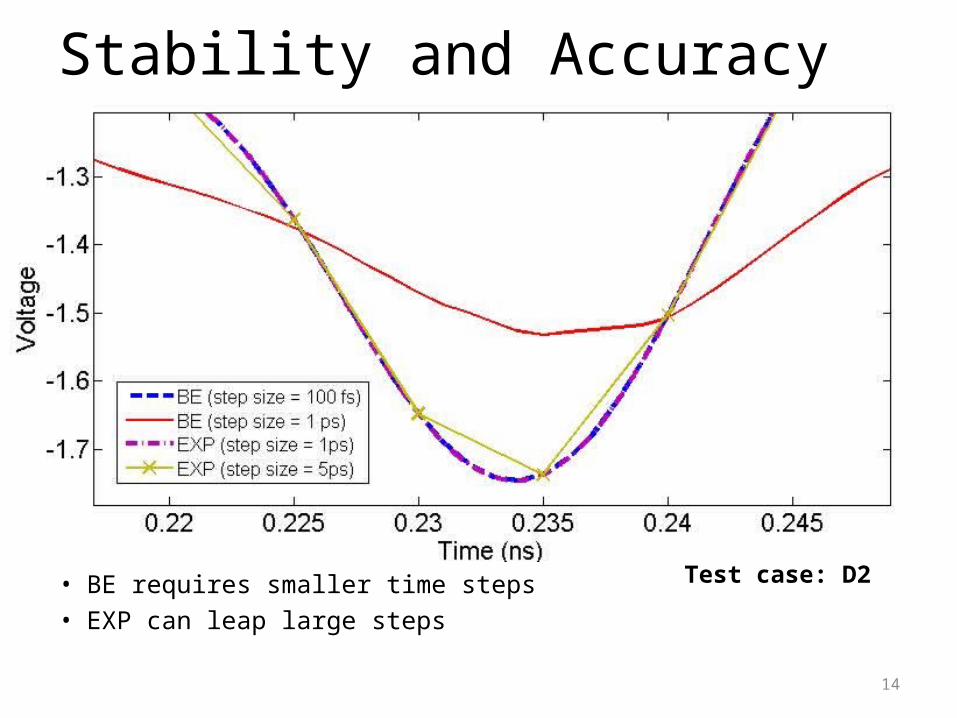
Test case: D2• BE requires smaller time steps• EXP can leap large steps
Stability and Accuracy
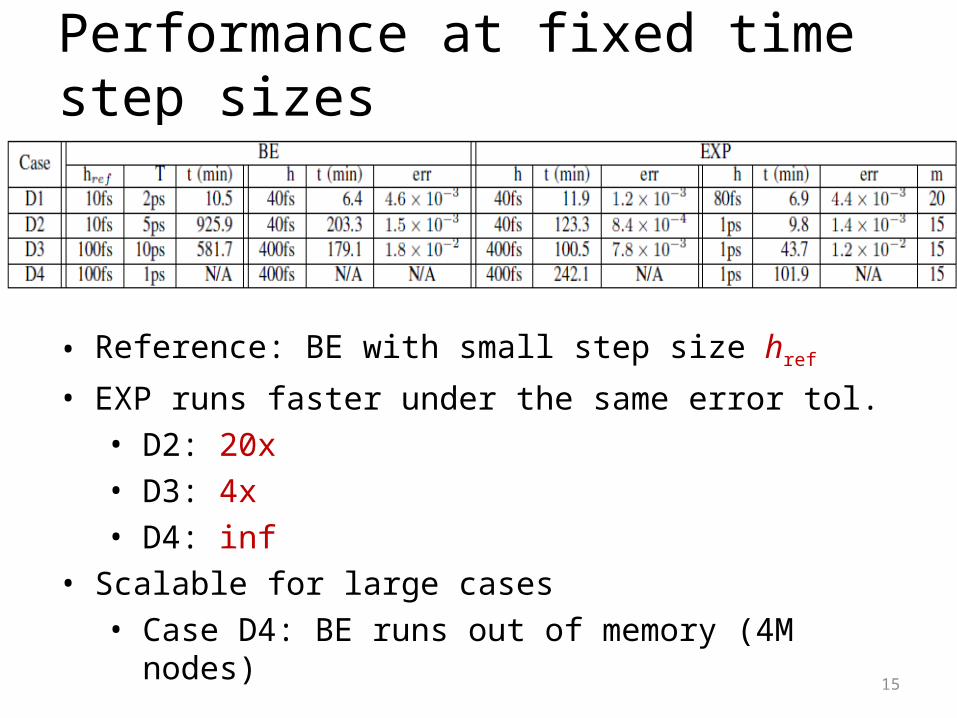
Performance at fixed time step sizes
15
• Reference: BE with small step size href
• EXP runs faster under the same error tol.• D2: 20x• D3: 4x• D4: inf
• Scalable for large cases• Case D4: BE runs out of memory (4M nodes)
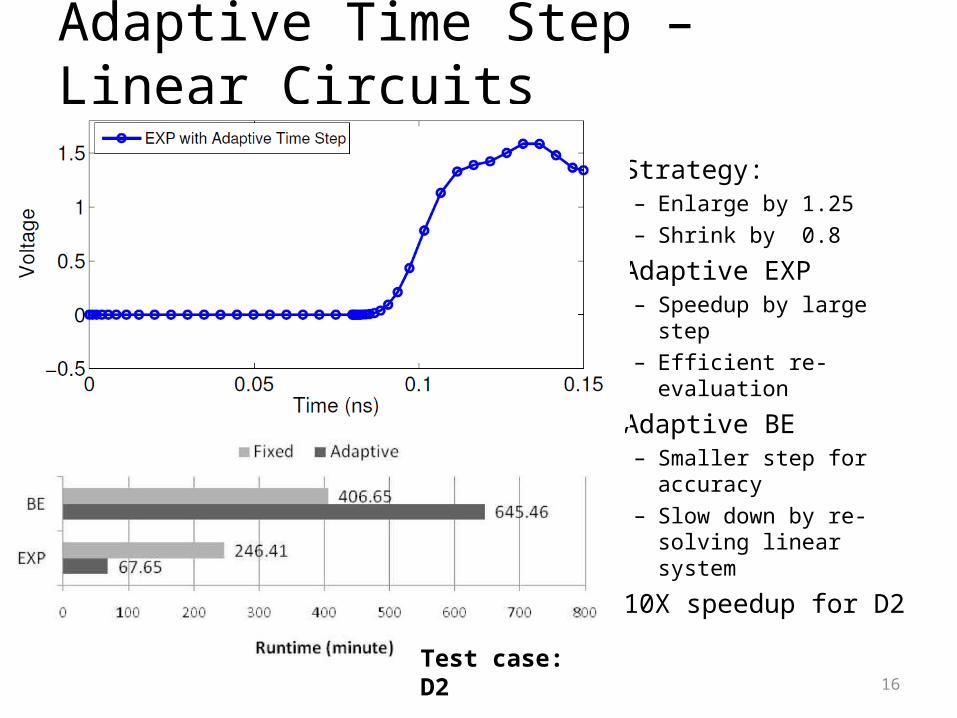
Adaptive Time Step – Linear Circuits
• Strategy:– Enlarge by 1.25– Shrink by 0.8
• Adaptive EXP– Speedup by large step– Efficient re-evaluation
• Adaptive BE– Smaller step for
accuracy– Slow down by re-
solving linear system
• 10X speedup for D2
16
Test case: D2
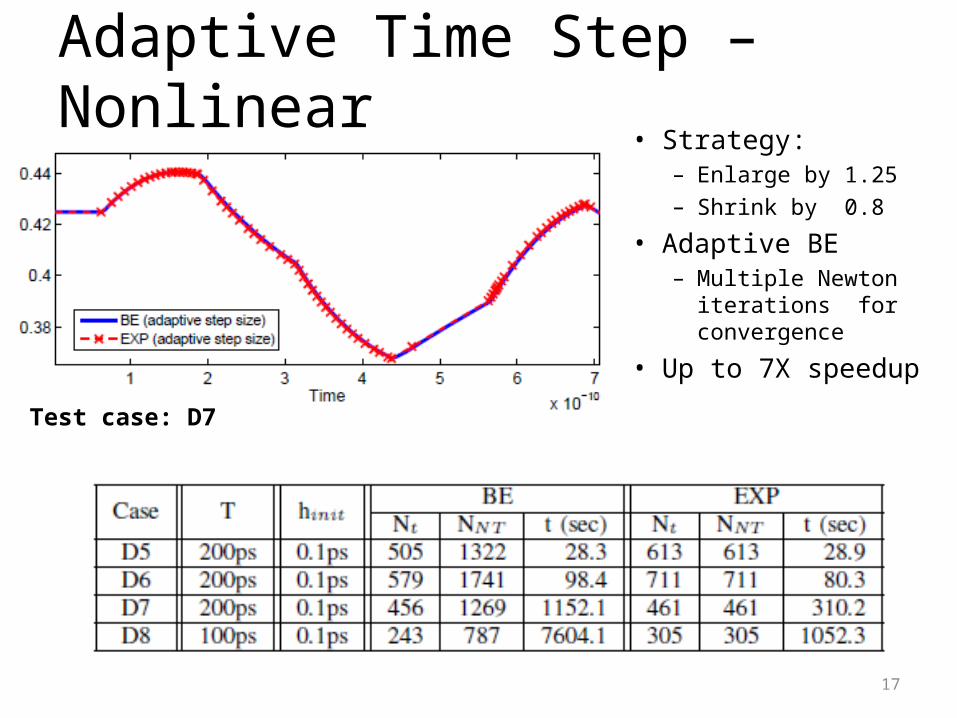
Adaptive Time Step – Nonlinear • Strategy:
– Enlarge by 1.25– Shrink by 0.8
• Adaptive BE– Multiple Newton
iterations for convergence
• Up to 7X speedup
17
Test case: D7
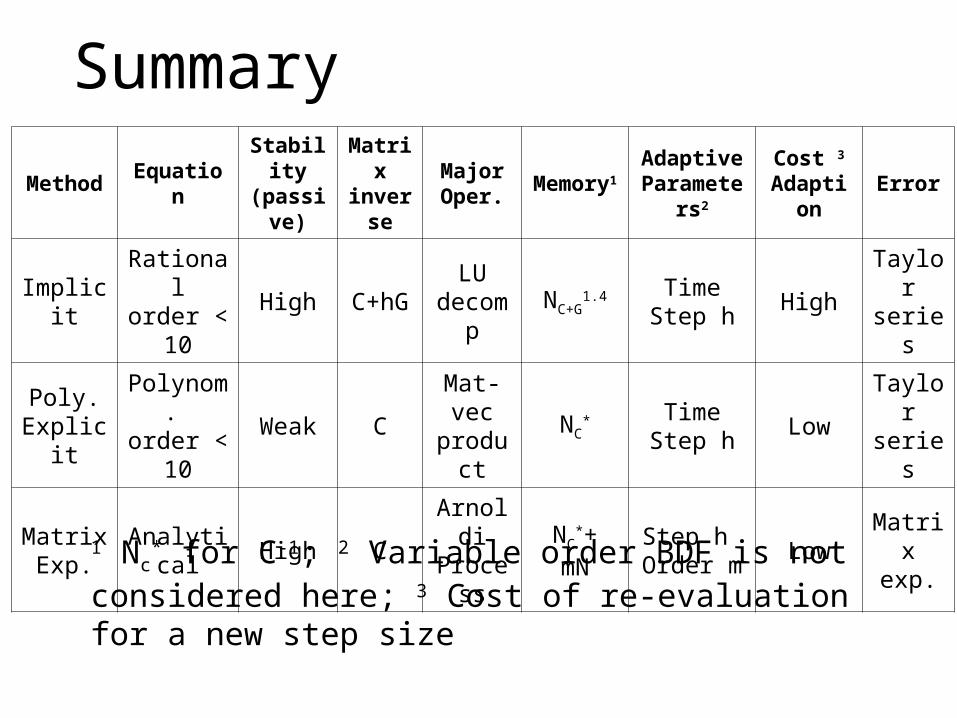
Method Equation Stability(passive)
Matrix inverse
MajorOper. Memory1 Adaptive
Parameters2
Cost 3
Adaption Error
Implicit Rationalorder < 10 High C+hG LU
decompNC+G
1.4 TimeStep h High Taylor
series
Poly. Explicit
Polynom. order < 10 Weak C Mat-vec
productNC
* TimeStep h Low Taylor
series
Matrix Exp. Analytical High C Arnoldi
ProcessNC
*+mN
Step h Order m Low Matrix
exp.
1 Nc* for C-1; 2 Variable order BDF is not considered
here; 3 Cost of re-evaluation for a new step size
Summary
Summary• Matrix exponential method is scalable
– Stability: Good– Accuracy: SPICE
• Krylov subspace approximation– Reduce the complexity
• Preliminary results – Up to 10X and 7X for linear and nonlinear, respectively
• Limitations of matrix exponential method– Singularity of C– Stiffness of C-1G
19
Future Works• Scalable Parallel Processing
– Integration– Matrix Operations
• Applications– Power Ground Network Analysis– Substrate Noises– Memory Analysis– Tera Hertz Circuit Simulation
20
Thank You!
21





























