Embed Size (px)
Citation preview

CHAPTER 3
Stiffness Matrix Method
3-1- DEFINITION
The stiffness method is a method of analysis, where the main unknowns
are the displacements of joints. These unknowns are determined from
equilibrium. The method can be used for determination of displacements
and internal forces due to
external loads,
environmental changes (temperature and shrinkage), and
support movement.
The stiffness method is applicable to skeletal structures (beams, plane and
space frames and trusses, and grids), and continuum structures (plates,
shells, and three dimensional solids).
(Question: what is the difference between skeletal and non-skeletal
structures (continuum structures)?)
The steps of this method are:
1- Modeling
Model the structure with a number of members and
joints,
Define types of members and connections,
Identify the relevant unknown components of joint displacements.
2- Load vector
For each member determine the member fixed end
forces (which are the reactions due to loads if all the
relevant joint displacements were prevented).
3- Stiffness matrix
For each member determine the member end forces
due to joint displacements (i.e. member stiffness
equations).
4- Equilibrium equations
Write the equations of equilibrium of all joints (under
the forces in steps 2 and 3, and joint loads).
5- Solving equilibrium equation

Solve equilibrium eq. to determine joints
displacements.
6- Internal forces
Use the resulting joint displacements to determine the
total member end forces.
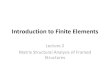
The above steps can be illustrated by the following example:
EXAMPLE
Determine the displacements
and member end forces in the
shown frame due to the
given loads.
STEP 1: Modeling.
3 t2 t / m
2.00 6.00
3.00
1
2 3
1
2D1
D2
D3 D4

STEP 2: Load vector
Fixed-end forces {F}
STEP 3: Stiffness matrix
Stiffness relations [K]
STEP 4: Equilibrium {F} = [K] {D}
STEP 5: Equations solution Get {D}
STEP 6: Internal forces Q, N, and M
3-2- STEP 1: MODELING
a- Numbering
Organization of the solution requires numbering the members, joints, and
forces and displacements components. Several numbering schemes are
possible. Choice of the most appropriate scheme depends on several
considerations including the method of assembling and solving equations
of equilibrium (banded matrix methods, frontal method, etc.). When
banded matrix methods are used for solving equilibrium equations,
members may be numbered in any convenient order, but
joints should be numbered in such an order that
the maximum difference between the numbers of the two joints of each
member is as small as possible. For example, the numbering in Fig. Is
more appropriate than that in Fig.
The unknown displacement components are usually numbered in a
certain sequence (for example in plane frame; x, y, and rotation) starting
at joint 1 and proceeding in ascending order through the joints. These
displacement components are called degrees of freedom.
2 t / m
6
6
0
6
6
0

b- Degrees of Freedoms
Several models of skeletal structures may be used depending on the
nature of the structure and the loads. Common skeletal models include
space frames, space trusses, plane frames, plane trusses, beams, and grids.
* In space frames, each joint has six degrees of freedom: three
translations (in X, Y, and Z directions) and three rotations (about X, Y,
and Z axes).
* In space trusses, all member ends are assumed to have hinged
connections, i.e. three degrees of freedom at each joint (rotation about X,
Y, and Z axes).
* In plane frames, a joint has three degrees of freedom since it has two
translations and one rotation.
* In plane trusses, a joint has two degrees of freedom (the translation
only) since rotation are not considered.
* In beams, axial and transverse forces and displacements are uncoupled,
and separate analyses may be carried out for axial effects and transverse
effects.
* In grids, in-plane displacements are not considered; therefore, also
rotations about an axis normal to the plane of the grid are not considered.
Thus, a grid joint has only three degrees of freedom (an out-of-plane
translation, and two rotations about in-plane axes).

c- Local and Global Axes
The axes which are convenient in dealing with members individually are
called local (member) axes, but the axes which are convenient in dealing
with the structure as a whole are called global (structure) axes.
Displacement and force components may be expressed using one of the
previous two systems.
The relation between the components in the two systems of axes is
expressed in matrix form which called transformation matrix [T].
1 2 3 4 5 6 7 8 9 10
20 19 18 17 16 15 14 13 12 11
1
2
3
4
5
67
1 12 13 24
2 2311 14
3 2210 15
4 219 16
5 208 17
6 197 18
4
1
5
1
32
4 5
2 3 6
21
17
13
9
5
1
7
6
8 9 12
4
8
2
6
3
7
12
16
20
24
10
14
18
15
11
19
13
22 23
16 17
7 10 11 14 15 18
20
19

Global and local force and displacement components
d1
d1
End 1
Plane or grid member
f1g
gf1
Y
c) Plane truss member
l
b) Plane frame member
l
f3
Globalg
f4
g gf2 d2
d4gg
d1f1l
d3g g
f2l
Global
d6
f4
g
d3f3g g
f5
d2f2gg f6
d5
g
g g
lf1 d1
g
gd4
g
lf2
f3
Local
f4
d2l
d4l l
d3l l
f4
d6
Local
llf3 d3
f5
ld2
ll
l
d5
f6l
lld4
a) Geometry
( X2,Y2)
Length =L
( X1,Y1)
End 2
X
Z
( X2,Y2,Z2)
Space member
End 1
( X1,Y1,Z1)Z
X
Y
X
Y End 2

In the case of plane frame, if the components of member
end forces in global direction are:
}{}{ 654321
ggggggg fffffff
and the corresponding components in local directions are:
}{}{ 654321
lllllll fffffff
as shown in Fig. , then;
}{][}{ lg fTf
where;
100000
0000
0000
000100
0000
0000
][
cs
sc
cs
sc
T
in which; c = cos θ = (X2 – X1) / L , and
s = sin θ = (Y2 – Y1) / L
where (X1 , Y1) and (X2 , Y2) are the coordinates of the joints at the start
and the end of member respectively with respect to global axes, and L is
the length of the member.
Similarly, the relation between the displacement components in global
directions {dg} and the displacement components in local directions {d
l}
for the joints of plane frame members is:
}{][}{ lg dTd
where [T] as defined above.
In the case of plane trusses, each of {fg}, {f
l}, {d
g}, and
{dl} has only four elements and the transformation matrix
reduces to:

cs
sc
cs
sc
T
00
00
00
00
][
In the case of grids, the transformation matrix is:
sc
cs
sc
cs
T
0000
0000
001000
0000
0000
000001
][
In the case of space frames, each joint has six degrees
of freedom then the transformation matrix is:
*
*
*
*
][
t
t
t
t
T
where
[Ø] = [0]3*3 , and
zyx
zyx
zyx
nnn
mmm
lll
t ][ *
where (lx, mx, nx), (ly, my, ny), and (lz, mz, nz) are the direction cosines of
the local axes x, y, and z with respect to the global axes X, Y, and Z.
In the case of space trusses, all member ends are
hinged. Therefore the transformation matrix is:

**000
**000
**000
000**
000**
000**
][
x
x
x
x
x
x
n
m
l
n
m
l
T
where the asterisks refer to unneeded elements, and (lx, mx, nx) are the
direction cosines which given by:
lx = (X2 – X1) / L, mx = (Y2 – Y1) / L, and nx = (Z2 – Z1) / L
3-2- STEP 2: LOAD VECTOR (MEMBER FIXED-END FORCES)
Member fixed-end forces means the reactions at the ends of members due
to loads, environmental changes, or support movement, when all the
unknown displacements at member end joints are prevented. These
reactions can be determined by classical methods such as column analogy
or consistent deformations.
Components of fixed-end forces in local directions may be arranged in a
vector }{ l
mf , which is called member load vector in local directions. The
corresponding components in global directions may be arranged in a
vector }{ g
mf which is called member load vector in global directions, and
can be determined from the transformation relation
}{ g
mf = [T] }{ l
mf
Fig. Shows some cases of member fixed-end forces.
WL/2
WL /12W t / m
L
WL/2
WL /122 2
PL/8
P/2 P/2
L
PPL/8

WL /30
L
W t / m2
WL /202
WL2
20
WL
30
2
( )
LL
2
20
WL2
WL
30)(
0.333 WL0.167 WL
WL/4
5WL /96
L
W t / m2
5WL /962
WL/4
2PL/9
L
P
P
P
2PL/9P
P.a.b /L
bPb/L
P
Pa/La
2 2P.b.a /L
2 2
P.a.b(
2
L
L)2
2P.b.a
L2
P.b.a2
P.a.b(
L
2L L2
2
)
L
M/4 M/4
1.5 M / L
M
1.5 M / L

W
W
P3
W
(5)
P2
P2
(3)
W
(1)
P1
P1
P1
P2
(4)
(2)

3-3- STEP 3: STIFFNESS MATRIX (MEMBER END FORCES DUE TO
JOINT DISPLACEMENTS)
Displacements of joints cause member end displacements and hence
member deformations and internal forces between joints and member
ends. These member end forces depend on the type of connection
between joints and member end.
a- Force-Displacement Relation in Local Directions
In the case of plane truss member shown in Fig. , let
the joints undergo displacements whose components in
local directions are ld1 , ld2 , ld 3 , and ld4 . The lateral
displacements can occur without deformation (small
displacements and hinged connections). On the other hand,
the axial displacements ld1 and ld 3 result in an elongation
( ld 3 - ld1 ) and hence tension N = ( ld 3 - ld1 ) EA / L.
The corresponding forces from joints to member ends are: l
df 1 = -N = ( ld 3 - ld1 ) EA / L l
df 2 = l
df 4 = 0
l
df 3 = N = ( ld 3 - ld1 ) EA / L
or in matrix form;
}{ l
df = }{][ ll dk
where
0000
0101
0000
0101
][
lk
The matrix ][ lk is known as the member stiffness matrix in local
directions. It can be noticed that the elements of the ith
column of ][ lk
are the forces }{ l
df when l
id = 1 while all other components of }{ ld are
zeros. This observation is usually used as a convenient basis for deriving
the matrix ][ lk for members of different types.
Consider a plane frame member with fixed ends as shown in Fig. . To
derive elements of the first column of ][ lk , let ld1 = 1 while all other
components of }{ ld are zeros. The corresponding end forces are the
elements of the first column of ][ lk , and these elements are:
(EA/L) { 1 0 0 -1 0 0 }T

Elements of the second column of ][ lk are the forces correspond to ld2 =
1, while all other components of }{ ld are zeros. Then the elements of the
second column of ][ lk are:
(6EI/L2) { 0 2/L 1 0 -2/L 1 }
T
Note that these forces can be determined using the method of consistent
deformations. Similarly the components of the third, fourth, fifth, and
sixth columns can be determined and the complete stiffness matrix of the
member in local axes directions is:
LEILEILEILEI
LEILEILEILEI
LEALEA
LEILEILEILEI
LEILEILEILEI
LEALEA
k l
/4/60/2/60
/6/120/6/120
00/00/
/2/60/4/60
/6/120/6/120
00/00/
][
22
2323
22
2323
It may be observed that each column of ][ lk represent a set of forces in
equilibrium. It may also be observed that the matrix ][ lk is symmetric,
i.e. l
ji
l
ij kk . These two observations may be used for deriving some
elements of ][ lk .

Members, joints and degreesof freedom (D.O.F.)
4
3
2
1
Equilibrium equations
33
23
13
Member load vectors
31
21
g2
g2
g2
11+k44k41k
61
51
kg1
kg1
64
54
g1
k +k
g1
k +k
g1
g1
11k
1
g1
14kg1
2
461245 k +kk +k
32
22
g2
g2
65
55
g1
k +k
g1
k +k
66
56
g1
k +kg2
g1
k +kg2
g2g1
15kg1
3
g1 g2
16kg1
4
0 - f - f
-5 - f - f
3 - f - f
0 - f
=D2
D4
D3
D1
m4 m1
m6
m5
g1
g1
m3
m2
g2
g2
g1
m1g1 g2
Fixed 2 3
Structure and loads
6
5
4
3
2
1
3
4
2
0
0
1
0 5
local row numbers
Member stiffness matrices
53
g
64
fm
1
2
3
4
0
0
2
1
Kg
11
0 5
f
0 6
mg
2
3
4
0 4
3
2
2 1
60
gK
2
numbersglobal position
01
21
20
43
43
65
W2
2
3
40
4
3
12
32
1 2
04
3 4
00
5 6
Hinged
1D
1
1
W1P2
P1D
2D
24
D3
local column numbers
Example for assembly of equilibrium equations
To find the overall stiffness matrix

0
0
/
0
0
/
LEA
LEA
2
3
2
3
/6
/12
0
/6
/12
0
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
/2
/6
0
/4
/6
0
2
2
0
0
/
0
0
/
LEA
LEA
2
3
2
3
/6
/12
0
/6
/12
0
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
/4
/6
0
/2
/6
0
2
2
LEILEILEILEI
LEILEILEILEI
LEALEA
LEILEILEILEI
LEILEILEILEI
LEALEA
k l
/4/60/2/60
/6/120/6/120
00/00/
/2/60/4/60
/6/120/6/120
00/00/
][
22
2323
22
2323
EA/L EA/L
= 1
= 1
6EI/L2
12EI/L12EI/L
26EI/L
3 3
= 1
2EI/L4EI/L
6EI/L2
6EI/L2
EA/L EA/L
= 1 6EI/L2
12EI/L3
12EI/L3
= 1
6EI/L2 2EI/L
26EI/L
26EI/L
= 1
4EI/L

0
0
/
0
0
/
LEA
LEA
0
/3
0
/3
/3
0
3
2
3
LEI
LEI
LEI
0
/3
0
/3
/3
0
2
2
LEI
LEI
LEI
0
0
/
0
0
/
LEA
LEA
0
/3
0
/3
/3
0
3
2
3
LEI
LEI
LEI
0
0
0
0
0
0
000000
0/30/3/30
00/00/
0/30/3/30
0/30/3/30
00/00/
][
323
22
323
LEILEILEI
LEALEA
LEILEILEI
LEILEILEI
LEALEA
k l
EA/L EA/L
= 13EI/L
2
3EI/L3
3EI/L3
= 1
23EI/L
23EI/L
= 1
3EI/L
EA/L EA/L
= 1
3EI/L3EI/L
23EI/L
= 1
3 3
= 1

0
0
0
0
0
0
0
/3
0
/3
/3
0
3
2
3
LEI
LEI
LEI
0
/3
0
/3
/3
0
2
2
LEI
LEI
LEI
0
0
/
0
0
/
LEA
LEA
0
/3
0
/3
/3
0
3
2
3
LEI
LEI
LEI
0
0
0
0
0
0
000000
0/30/3/30
00/000
0/30/3/30
0/30/3/30
00/000
][
323
22
323
LEILEILEI
LEA
LEILEILEI
LEILEILEI
LEA
k l
= 1
3EI/L3EI/L
23EI/L
= 1
3 3
= 1
3EI/L
3EI/L2
3EI/L2
EA/L
= 1
EA/L
3EI/L
3EI/L
3EI/L3
2
= 1
3
= 1

0
0
/
0
0
/
LEA
LEA
0
0
0
0
0
0
0
0
0
0
0
0
0
0
/
0
0
/
LEA
LEA
0
0
0
0
0
0
0
0
0
0
0
0
000000
000000
00/00/
000000
000000
00/00/
][LEALEA
LEALEA
k l
EA/L
= 1
EA/L= 1 = 1
EA/L
= 1
EA/L = 1 = 1

3-4- STEP 4 : The Overall Equilibrium Equation
From the steps number 3 & 4 we can construct the overall equilibrium
equation as follow:
{ F } nx1 = [ K ] nxn * { D }nx1
Where: (n) the number of degree of freedom (DOF) which defined
from step no 1( modeling ).
3-5- STEP 5 : Solve The Equilibrium Equation
By using back Guss elimination we can solve the equilibrium
equation and find the overall global displacement { D }g
We can find the local displacement from the relation
{ D }l = [ T ]
T * { D }
g
Where [ T ] the transformation matrix for member
For plane truss member is:
cs
sc
cs
sc
T
00
00
00
00
][
For plane frame member is:
100000
0000
0000
000100
0000
0000
][
cs
sc
cs
sc
T

d2
d1
d4
d3
3-6- STEP 6 : Find The Internal Forces
For plane truss member:
L
EAN sin*)(cos*)( 2413 dddd
For plane frame member:
sin*cos* 211 DDDg
sin*cos* 122 DDDg
33 DDg
sin*cos* 544 DDDg
sin*cos* 455 DDDg
66 DDg
L
EADgDgNN )( 1421
)(12
)(12
36252321 DgDgL
EIDgDg
L
EISS
)2(2
)(6
362521 DgDgL
EIDgDg
L
EIM

)2(2
)(6
635222 DgDgL
EIDgDg
L
EIM