Embed Size (px)
Citation preview

Diseño de sistemas de control
Diferencias entre análisis y diseño
Análisis: predecir la dinámica
Diseñar: mejorar la evolución del sistema. Especificaciones: Estabilidad, precisión y rechazo al ruido
Múltiples técnicas de diseño Pericia del ingeniero
Procedimiento:
1. Pliego de condiciones, i.e. los datos de partida y los
requisitos dinámicos que se van a imponer.
2. La arquitectura física de control.
3. La metodología del diseño de los reguladores de
control.

Arquitecturas de control
GC(s) GP(s)
H(s)
+
-
GC(s) GP(s)
H(s)
+
-
HC(s)
-
+
+
GC(s) GP(s)
H(s)
+
-
GCP(s)
G1(s)
+
++
Compensación en cascada
Compensación en paralelo o por
realimentación
Compensación predictiva o por
prealimentación

Condiciones básicas exigibles
El sistema deberá de cumplir cuatro requisitos:
1. Estabilidad
2. Precisión
3. Adecuadamente amortiguado y debe ser lo suficientemente
rápido en el tiempo
4. Rechazo a las perturbaciones

Condiciones básicas exigibles
X(s)
G(s)
H(s)
Y(s)+
-
12
2
nn
ss
k
X(s) Y(s)X(s)
G(s)
H(s)
Y(s)+
-
12
2
nn
ss
k
12
2
nn
ss
k
X(s) Y(s)
Dominio del
tiempo
Sobreoscilación MP, tP
Tiempo de subida tr
Tiempo de establecimiento ts
Error en el régimen permanente ep, ev, ea
Dominio de la
frecuencia
Margen de fase γ
Frecuencia de cruce de ganancia ωg
Pico de resonancia y frecuencia de resonancia Mr, ωr
Error en el régimen permanente ep, ev, ea
Dominio
complejo
Coeficiente de amortiguamiento ζ
Constante de amortiguamiento σ
Frecuencia amortiguada ωd
Frecuencia natural no amortiguada ωn
Error en el régimen permanente ep, ev, ea
cc cc
cc

Condiciones básicas exigibles
El sistema deberá de cumplir cuatro requisitos:
1. Estabilidad
2. Precisión
3. Adecuadamente amortiguado y debe ser lo suficientemente rápido en el
tiempo
4. Rechazo a las perturbaciones
G2(s)
+
-
G1(s)
+
+
X(s)
Z(s)
Y(s)
sGsG
sGsM
sGsG
sGsGsM
sZsGsG
sGsX
sGsG
sGsGsY
21
22
21
211
21
2
21
21
1)(
1)(
11
0
1
1y 12
0
10
210
10 lim
limlimlim sM
sM
sGsGsG
s
s
ss

Consecuencias en el diseño
El regulador debe tener alta ganancia estática (precisión
y rechazo a las perturbaciones)
Acción integradora (la I del PID)
Los integradores hacen que sean más precisos los sistemas
de control, pero también disminuyen la estabilidad
Los integradores introducen un desfase de -90º en la cadena
abierta.
Compromiso entre estabilidad y rapidez
Mp entre el 5% y el 35% o Mr entre 1dB y 3dB.
Acción adelanto de fase (la PD del PID)
Si responde bien al escalón tiene una tendencia a
comportarse bien con otras señales de mando

Ejemplo
Se tiene una planta del tipo:
al que se le coloca un compensador en serie de tipo proporcional (P), con una ganancia que vale 1 y 5. La realimentación es unitaria. Se pide:
1. Obtener la respuesta del conjunto ante la entrada en escalón y calcular los parámetros más significativos.
2. Si el regulador es remplazado por un integrador ideal con una constante de tiempo de 2 s, caracterizar su respuesta temporal.
3. Determinar para los tres anteriores casos las frecuencias de cruce de ganancia y los márgenes de fase
321
10
6116
1023
ssssss
sGP

Ejemplo
LDR, ep, polos dominantes y parámetros del régimen
transitorio:
-5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
3Root Locus Design
Ima
g A
xes
Real Axis
%7.105
%5.371
6
10lim
0 p
p
Ps
P ek
ekkskGK
11.311.0
77.55
73.1845.0
3.41
0)106(116 23
jsk
jsk
kssssD
stMststk
stMststk
sppr
sppr
8.27%48.89151.05
71.3%56.218.117.11
11.3,035.0,º885
92.1,438.0,º641
n
n
k
k

Ejemplo
Test al escalón para k = 1 ó 5:
stMststk
stMststk
sppr
sppr
8.27%48.89151.05
71.3%56.218.117.11
Time (sec.)
Am
plit
ud
e
Step Response
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8From: U(1)
To:
Y(1
)
Time (sec.)A
mp
litud
e
Step Response
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6From: U(1)
To:
Y(1
)
%7.105
%5.371
p
p
ek
ek

Ejemplo
Con I
-5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
3
Real Axis
Ima
g A
xes
Root Locus Design
%02
1lim
0
pPs
P esGs
K
74.084.2
74.016.00101222122 234
j
jssssssD
stM
stst
sp
pr
63.19%7.50
24.441.2
Time (sec.)
Am
plit
ud
e
Step Response
0 5 10 15 20 25 300
0.5
1
1.5From: U(1)
To:
Y(1
) 75.0,21.0,º78
2
1 nc
ssG

Ejemplo: respuesta frecuencia
Tipo P: 33.015.011
6
10
jjj
k
kGp
ggg
ggg
arctgarctgarctg
k
33.05.0180
13578.13861.00272.06
10 246
2
Frequency (rad/sec)
Pha
se
(d
eg
); M
ag
nitud
e (
dB
)
Bode Diagrams
10-1
100
101
102
-300
-200
-100
0
To:
Y(1
)
-150
-100
-50
0
50From: U(1)
Frequency (rad/sec)
Pha
se
(d
eg
); M
ag
nitud
e (
dB
)
Bode Diagrams
10-1
100
101
102
-300
-200
-100
0
To:
Y(1
)
-100
-50
0
50From: U(1)
º6/35
º90/11
sradk
sradk
g
g

Ejemplo: respuesta frecuencia
Tipo I: 33.015.0112
6
10
jjjjkGp
ggg
gggg
arctgarctgarctg
33.05.090
3578.13861.00272.012
10 2468
2
Frequency (rad/sec)
Pha
se
(d
eg
); M
ag
nitud
e (
dB
)
Bode Diagrams
10-2
100
102
104
106
108
-400
-300
-200
-100
0
To:
Y(1
)
-800
-600
-400
-200
0
200From: U(1)
º8.26/65.0 sradg

Ejemplo
Comparativa entre el dominio temporal y frecuencial
11.3,035.0,º885
92.1,438.0,º641
n
n
k
k
º6/35
º90/3/11
sradk
sradsradk
fg
fg
75.0,21.0,º782
1 nc
ssG
º8.26/1/65.0 sradsrad fg

Metodología para el diseño de los compensadores
Experimentales
Ziegler-Nichols
Analíticos
Identificación de la FDT del sistema
Técnica
Análisis: P,PI,PD y PID
Síntesis

Regulares P
Varían la ganancia estática
No modifican el LDR
Débil compromiso entre precisión y respuesta del régimen transitorio

Estos compensadores son una combinación lineal entre la
señal de error y su derivada (efecto anticipador)
Ideal (no causal)
Valores iniciales elevados: saturación de las etapas
Modifica LDR con la adición de un cero en la cadena abierta
0 100 200 300 400 500-0.5
0
0.5
1
1.5
2Relación entre el error y su derivada
e(t
) y
de
(t)/
dt
t
Error
Derivada del error
Regulares PD
dt
tdeTtekty d
dc sTksE
sYsG 1
-5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
3Root Locus Design
Ima
g A
xes
Real Axis
-5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
3Root Locus Design
Ima
g A
xes
Real Axis

Regulares PD
Mejora el comportamiento dinámico del transitorio.
No tiene la capacidad de modificar, de forma independiente, el
régimen permanente, puesto que los parámetros de regulador
PD, k y Td, son empleados para ajustar el transitorio.
Aumenta el margen de fase y la frecuencia de cruce
Problemas con la amplificación del espectro de alta frecuencia
(ruido).
Problemas con las saturaciones al inicio de la maniobra
Frequency (rad/sec)
Pha
se
(d
eg
); M
ag
nitud
e (
dB
)
Bode Diagrams
0
5
10
15
20
25From: U(1)
100
101
102
0
20
40
60
80
100
To:
Y(1
)
[s]
0
0
-1
0
1

Redes de adelanto de fase
PD real
nd
n
d
c TTsT
sTk
sE
sYsG
1
1
0
5
10
15
20
100
101
102
103
0
20
40
60
XO
dT
1
nT
1

Ejemplo de adelanto de fase
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Root Locus
Real Axis
Imagin
ary
Axis

Ejemplo de adelanto de fase
Step Response
Time (sec)
Am
plit
ude
0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
1.2
1.4
RAF
Gc=2

Reguladores proporcionales-integrales(PI)
Compromiso entre precisión (I) y rapidez (P)
Elevar el tipo del sistema con la adición de un integrador
en la cadena abierta:
Implementación real con una red de retraso de fase
dtte
Ttekty
i
1
i
i
csT
sTk
sE
sYsG
1
ir
r
i
c TTsT
sTk
sE
sYsG
1
1
s
sTk
sT
sT
T
ksG i
T
r
i
r
cr
1'
1
1
1

Reguladores proporcionales-integrales(PI)
Parámetros k y Ti para mejorar en precisión.
RRF modifica ligeramente el LDR.
Preservar los polos dominantes de la cadena cerrada
Aunque introduce un polos próximo cerca del origen en la
cadena cerrada
Frecuencial
Disminuir g para aumentar
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Root Locus
Real Axis
Imagin
ary
Axis
-20
-15
-10
-5
0
100
101
102
103
-60
-40
-20
0
X O
rT
1
iT
1

Ejemplo de retraso de fase
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Root Locus
Real Axis
Imagin
ary
Axis

Ejemplo de retraso de fase
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time (sec)
Am
plit
ude
Gc=2
RRF
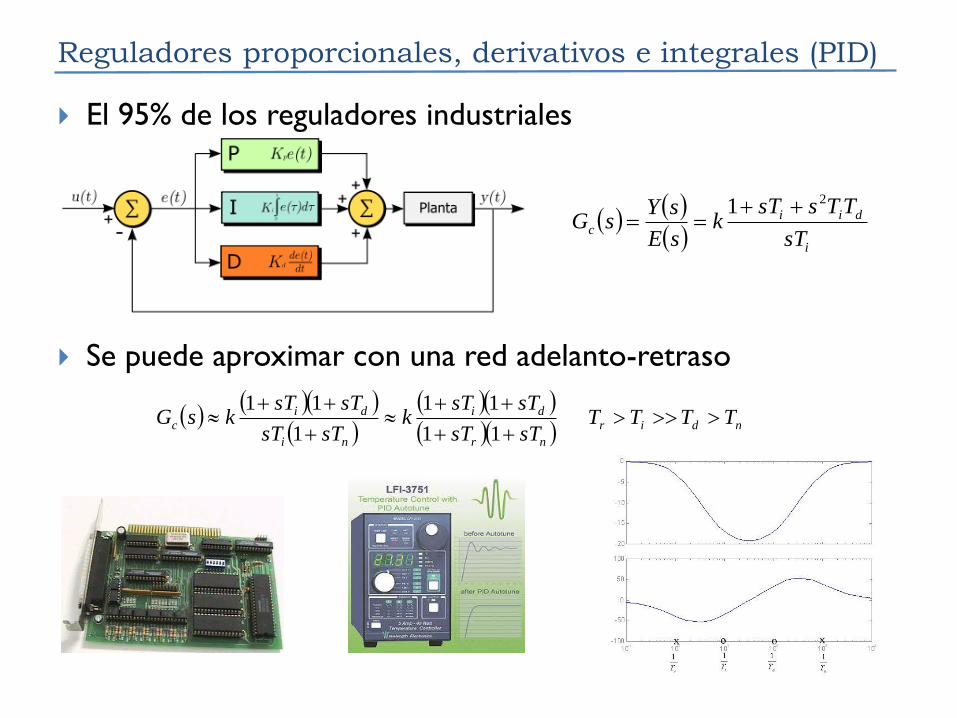
Reguladores proporcionales, derivativos e integrales (PID)
El 95% de los reguladores industriales
Se puede aproximar con una red adelanto-retraso
i
dii
csT
TTssTk
sE
sYsG
21
ndir
nr
di
ni
di
c TTTTsTsT
sTsTk
sTsT
sTsTksG
11
11
1
11

Ejercicio de examen
La función de transferencia de un proceso a controlar es: 𝐺𝑝 𝑠 =1
(𝑠+1)(𝑠+2)(𝑠+4). Se desea que la
señal de salida siga a la de referencia, para lo cual se propone una arquitectura de control en cadena cerrada, con un sensor de función de transferencia unitaria. Se pide:
1. Si el regulador es de tipo P, calcular la ganancia de éste para que el error al escalón sea del 10%.
2. Trazado directo del lugar de las raíces. 3. Respuesta del sistema de control ante una entrada en escalón unitario con el regulador
definido en el apartado 1, sabiendo que una de las raíces del polinomio característico es -6.7. Indicar los valores más significativos. ¿Cuánto vale el margen de fase aproximadamente?. Ante los resultados obtenidos, describir las ventajas e inconvenientes de este sistema de control.
4. El regulador P es sustituido por una red de adelanto de fase 𝐺𝐶 𝑠 = 72𝑠+1
𝑠+3. Determinar el
margen de fase y la frecuencia de cruce de fase, sabiendo que la frecuencia de cruce de ganancia es 2.88 [rad/s].
5. Dibujar el diagrama de Bode y la curva polar de la cadena abierta. 6. Dibujar de forma aproximada la señal de salida del sistema de control ante una entrada en
escalón unitario. Comparar los resultados del regulador P con el PD real.

Ejercicio de examen
1. 𝑒𝑃 =1
1+𝐾/8=0.1, luego K=72. ( 1 punto)
2.
( 2 puntos)
-14 -12 -10 -8 -6 -4 -2 0 2 4-10
-8
-6
-4
-2
0
2
4
6
8
10
Root Locus
Real Axis
Imag
inar
y A
xis

Ejercicio de examen 3. Hay un polo -6.7 y el polo complejo y conjugado es -0.153 ±j3.45, por lo que se puede aplicar polos
dominantes y determinar el equivalente aproximado del conjunto realimentado.
Si cc = 0.043, el margen de fase aproximadamente es 4.3º.
El sistema con este regulador P aunque tiene un error del 10% de posicionamiento y es próximo a la
inestabilidad (2 puntos).
Step Response
Time (sec)
Am
plitu
de
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6

Ejercicio de examen 4. El margen de fase es 45.5º y la frecuencia de cruce de fase es aproximadamente 5 [rad/s] (1 puntos).
5.
Bode Diagram
Frequency (rad/sec)
10-2
10-1
100
101
102
-270
-180
-90
0
Pha
se (
deg)
-100
-80
-60
-40
-20
0
20
Mag
nitu
de (
dB)
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5-2.5
-2
-1.5
-1
-0.5
0
0.5
Nyquist Diagram
Real Axis
Imagin
ary
Axis

Ejercicio de examen
6. Dado que el conjunto realimentado se puede aproximar a un sistema de segundo orden, se puede
considerar que la frecuencia natural está 2.88 ≤ 𝜔𝑐𝑐 ≤ 5.1 y 𝜉𝑐𝑐 = 0.455. De otro lado, el error de
posicionamiento en el régimen permanente es 0.25. Con esto valores se calcula los tiempos de
establecimiento (2.31 s), de pico (1.17 s) y de subida (0.76 s), la sobre-oscilación del 36.7% y un valor
del régimen permanente al escalón unitario de 0.75.
(2 puntos)
Step Response
Time (sec)
Ampl
itude
0 1 2 3 4 5 6
0
0.2
0.4
0.6
0.8
1
1.2
1.4

Problema

Problema
Bode Diagram
Frequency (rad/sec)
10-3
10-2
10-1
100
101
102
-360
-270
-180
-90
0
Pha
se (
deg)
-150
-100
-50
0
50
Mag
nitu
de (
dB)
-5 0 5 10 15 20 25 30 35
-15
-10
-5
0
5
10
15
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
2. Considerando nulo el retardo y con k=1, dibujar el diagrama de Bode y la curva polar de la cadena
abierta (2 puntos).

Problema
0 2 4 6 8 10 12 14 16 18
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plitu
de
3. Bajo las condiciones de los apartados anteriores, estimar aproximadamente la respuesta
temporal del sistema de control ante una entrada en escalón unitario (2 puntos).

Problema 4.Determinar el margen de fase del sistema de control considerando el retardo temporal de 1s (1 puntos).
El retardo no modifica la frecuencia de cruce de ganancia. El margen de fase habrá que restar el
desfase introducido por el retardo:
γ=180-(arctg ωg+arctg 30ωg+arctg (ωg⁄3)/(1-((ωg^2)⁄(9)))+ωg )180/π=-14º
5.Calcular el valor de k para que el margen de fase sea de 40º considerando el retardo temporal (2 puntos).
Si se desea mejorar el margen de fase habrá que disminuir la frecuencia de cruce de ganancia.
Habrá que variar k. La variación de k no modifica el argumento de la cadena abierta. Se localiza la
nueva frecuencia de cruce de ganancia mediante:
La nueva frecuencia de cruce de ganancia está alrededor de 0.5 rad/s. Para que sea esta
frecuencia requiere cumplir:
El valor de k está alrededor de 0.5.
Para este valor del regulador, se procede a la simulación de su respuesta en frecuencia y la
evolución temporal ante una entrada en escalón.

Problema
Simulaciones con Matlab
-80
-60
-40
-20
0
20
40
Mag
nitu
de (
dB)
Bode Diagram
Frequency (rad/sec)
10-3
10-2
10-1
100
101
-900
-720
-540
-360
-180
0
Pha
se (
deg)
0 5 10 15 20 25 30 35
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plitu
de

Técnicas de compensación basadas
Métodos experimentales: Ziegler-Nichols
Diseño basado en modelos matemáticos
PID
Primer método: ajuste en cadena abierta
sT
sTKsG d
i
pc
11)(
Planta
+
-
Planta u(t) y(t)
K
L T
Modelo
Planta
1)(
)(
Ts
LsK
su
sy e
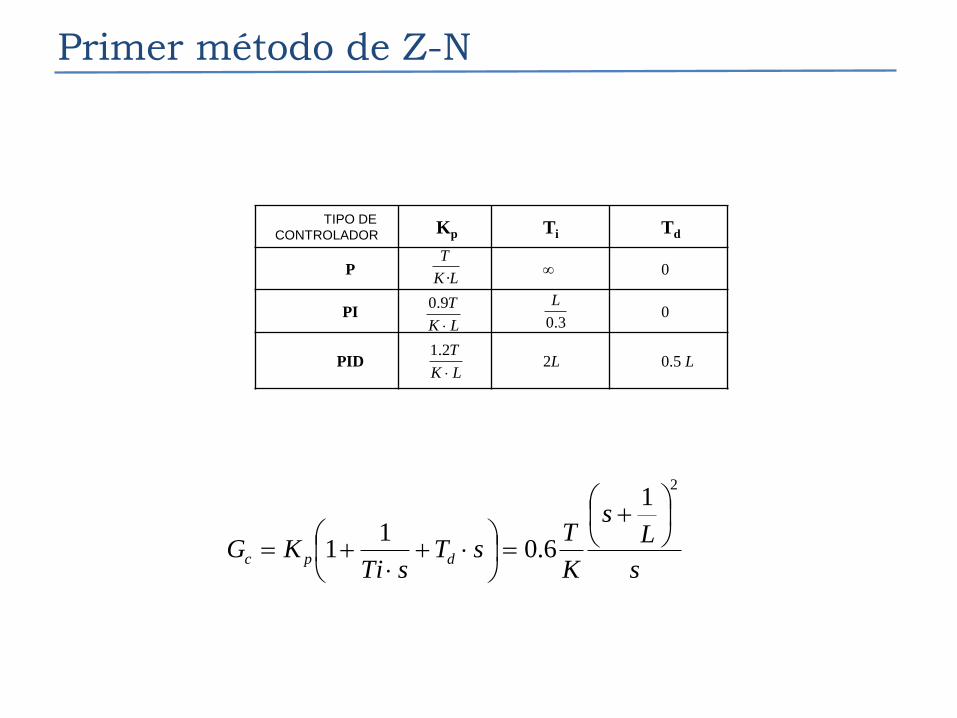
Primer método de Z-N
s
Ls
K
TsT
sTiKG dpc
21
6.01
1
TIPO DE
CONTROLADOR Kp Ti Td
P 0
PI 0
PID 2L 0.5 L
LK
T
·
LK
T
9.0
3.0
L
LK
T
2.1

Ejemplo
Laboratorio: T=14s, L=4s, K=1.2
Step Response
Time (sec)
Am
plit
ude
0 5 10 15 20 25 30 35 40 450
0.2
0.4
0.6
0.8
1
1.2
1.4

Ejemplo
Diseñar un regulador PID para el sistema cuya función de
transferencia es:
según el método de ajuste en cadena abierta de Ziegler-
Nichols.
)3)(2)(1(
1)(
ssssG
Time (sec.)
Am
plitu
de
Step Response
0 1 2 3 4 5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
From: U(1)
To: Y
(1)
0,4 2,8
K=0,165
L=0.4 sec.
T=2.8-0.4=2.2 sec.

Ejemplo
s
ss
sGc
25,2
25,82,08,0
1125,41
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 -3
-2
-1
0
1
2
3
Real Axis
Imag A
xes
Lugar de las raíces
0 1 2 3 4 5 6 7 8 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6

Ejemplo
De forma analítica
1. Obtener la respuesta al escalón
2. Calcular el punto de inflexión de la curva
3. Ganancia estática
4. Relaciones geométricas
ttt
s eeety 32 166,05,05,0166,0)(
049,0)1,1(074,0)1,1(
.1,105,125,0)(
5,05,0)()(
32
2
2
32
ydt
dy
steeedt
tyd
eeetydt
tdy
s
ttts
ttts
166,0)(1
lim0
sGs
sKs
43,0074,0
05,01,125,2
074,0
166,0 LT

Segundo método de Z-N: Cadena cerrada
Time (sec.)
Am
plit
ud
e
Step Response
0 2 4 6 8 10 12 14 16 18 20 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2 Pcr
Kcr=60
s
Ps
PKsGcr
crcrc
2
4
075,0)(
TIPO DE
CONTROLADOR Kp Ti Td
P 0
PI 0
PID
crK5.0
crK45.02.1
crP
crK6.0 crP5.0 crP125.0
sT
sTKsG d
i
pc
11)(
Planta
+
-

Ejemplo
Diseñar un regulador PID para el sistema cuya función de
transferencia es:
según el método de ajuste en cadena cerrada de Ziegler-
Nichols.
)3)(2)(1(
1)(
ssssG
606
6116)3)(2)(1()( 23
p
pp
K
KsssKssssD
9,12
31,3
31,311066666 22
cr
cr
crdn
cr
T
jjssKs
s
ssGc
2)2(55,8)(

Ejemplo
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-10
-8
-6
-4
-2
0
2
4
6
8
10
Root Locus Editor for Open Loop 1 (OL1)
Real Axis
Imag A
xis
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
1.2
1.4

Examen enero 2017
El control de temperatura de una célula Peltier es implementado mediante un sistema de
realimentación unitaria. La planta Peltier es modelada mediante la siguiente función de
transferencia
Se pide:
1. Trazado directo del lugar de las raíces, aproximando el retardo temporal mediante Pade. Para el
resto de apartados no emplear la aproximación de Pade.
2. Ajustando el regulador proporcional con un valor de K que sea la mitad del valor de la K
crítica, determinar las frecuencias de cruce de ganancia y fase, así como, los márgenes de fase y
ganancia.
3. Dibujar el diagrama de Bode y la curva polar de la cadena abierta con el regulador del anterior
apartado. Indicar sobre las gráficas los puntos característicos.
4. Estimar la respuesta del sistema en cadena cerrada ante una entrada en escalón unitario.
Indicar sobre la gráfica los puntos característicos.
5. Calcular el regulador PID de Ziegler-Nichols
s
e
sv
sv s
r
s
141
2.1 4

Examen enero 2017 s2+(0.57-0.085k)s+0.035+0.042k
s2 1 0.035+0.042k
s1 0.57-0.085k
s0 0.035+0.042k
Los polos para la ganancia crítica serán de ±j0.57
7.6085.0
57.0crk
Dado que la ganancia crítica es 6.7, la cadena abierta queda como:
141
4)(
4
ekG
Las frecuencias de corte de ganancia y fase son aproximadamente: 0.28[rad/s] y 0.39[rad/s].
El margen de fase de será de 41.5º y el margen de ganancia de 2.8 dB
Bode Diagram
Frequency (rad/sec)
-35
-30
-25
-20
-15
-10
-5
0
5
10
15
System: g1
Gain Margin (dB): 3.74
At frequency (rad/sec): 0.434
Closed Loop Stable? Yes
Mag
nitu
de (
dB)
10-3
10-2
10-1
100
101
-2160
-1800
-1440
-1080
-720
-360
0
System: g1
Phase Margin (deg): 41.1
Delay Margin (sec): 2.59
At frequency (rad/sec): 0.277
Closed Loop Stable? Yes
Pha
se (
deg)
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Nyquist Diagram
Real Axis
Imag
inar
y A
xis

Examen enero 2017
Considerando que el margen de fase es de 41.5º, se puede considerar que el factor de
amortiguamiento es aproximadamente 0.415 y que la frecuencia natural estará en el
intervalo de la frecuencia de cruce de ganancia y fase, p.e. 0.3 [rad/s]. Además el error
al escalón será 1/(1+4). Por todo ello, se puede estimar que el tiempo de
establecimiento es de unos 25 s, el tiempo de pico de unos 10 s y que la sobreoscilación
del 25%. La señal de salida en el régimen permanente es de 0.8 y el valor máximo
estará alrededor de 1.
Para el valor de Kcr, la frecuencia de oscilación en 0.57 [rad/s], luego el periodo es de
11s. La FDT del regulador es: s
ssGc
236.0
25.5)(

Ajuste de un regulador proporcional mediante LDR
No modifica el LDR
Sólo establece un punto de funcionamiento.

Ejemplo ajuste de un regulador proporcional mediante LDR
Supóngase que se quiere regular el sistema:
de tal forma que cumpla las especificaciones siguientes:
Mp<15%, ts<2 s y ep<25%.
)2)(1(
1)(
sssG
1.- Calcular los valores de K necesarios para cumplir los requerimientos
estáticos:
62
))((
325,01
1
0
KK
sGKlimK
KK
e
sp
p
p
p

Ejemplo ajuste de un regulador proporcional mediante LDR
2.-Calcular la zona del lugar de las raíces en la que deben posicionarse los
polos dominantes en cadena cerrada para que la dinámica del sistema
cumpla las especificaciones. Una sobreoscilación del 15% supone un
margen de fase aproximadamente de 50º:
º87,5815100
57,122
tan
ep
s
M
sst
-2 -1.5 -1 -0.5 0 0.5 1 -3
-2
-1
0
1
2
3 Root Locus Design
Imag A
xes
Real Axis Real Axis
=1,57
-2 -1.5 -1 -0.5 0 0.5 1 -3
-2
-1
0
1
2
3 Root Locus Design
Imag A
xes
=58º
-2 -1.5 -1 -0.5 0 0.5 1 -3
-2
-1
0
1
2
3 Root Locus Design
Imag A
xes
Ts<2s, Mp<15%
S

Ejemplo ajuste de un regulador proporcional mediante LDR
3. Aplicando el criterio del módulo:
01,76,205,116,2057,112222
dz
dpK
7)( sGc
)2)(1(
1)(
sssG
+
-
Time (sec.)
Am
plit
ude
Step Response
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
From: U(1)
To: Y
(1)
K=7
K=1

Ejemplo ajuste de un regulador proporcional mediante LDR
Supóngase que se quiere regular el sistema:
de tal forma que cumpla las especificaciones siguientes:
Mp15%, ts<2 s y ep<25%.
No es posible realizarlo con un regulador P. Habrá que modificar el LDR.
)3)(2)(1(
1)(
ssssGp
-4 -3 -2 -1 0 1 2 -3
-2
-1
0
1
2
3
Real Axis
Ima
g
Axis
S
S

Ajuste de un regulador proporcional-derivativo (PD ideal)
Cuando se trata de modificar el LDR para que pase por los
polos dominantes se utiliza la inserción de un cero en la
cadena abierta:
-4 -3 -2 -1 0 1 2 -3
-2
-1
0
1
2
3
Real Axis
Ima
g
Axis
S
S
1 2 3
Time (sec.)
Am
plit
ude
Step Response
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8 From: U(1)
To: Y(1)
No regulado Regulación PD
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 -3
-2
-1
0
1
2
3 Root Locus Design
Imag A
xes
Real Axis
d
p
dpT
KasiendosTKasKsR )()(

Ajuste de un regulador proporcional-derivativo (PD ideal)
Supóngase que se quiere regular el sistema:
de tal forma que cumpla las especificaciones siguientes:
Mp10% y ts<2 s.
)3)(2)(1(
1)(
ssssGp
1. Se dibuja el LDR y el lugar de los polos dominantes deseados S.
-4 -3 -2 -1 0 1 2 -3
-2
-1
0
1
2
3
Real Axis
Ima
g
Axis
S
S
1 2 3
jS
M
sst
ep
s
27,1
º7,5310100
57,122
tan

Ajuste de un regulador proporcional-derivativo (PD ideal)
2. Mediante la aplicación del criterio del argumento, se introduce un cero de forma que
las ramas del LDR pasen por el punto S. Para ello se calcula el ángulo que debe
aportar el cero adicional para que S pertenezca al LDR. Obtenido el ángulo se calcula la
posición del cero:
51,2
44,2tan
º7,67
)7,1(
2arctan
º573,1
2arctan
º47,813,0
2arctan
º3,1097,0
2arctan180
º180
,...2,1,0)12(180),(),(
3
2
1
111
a
a
NNzSpS
c
c
c
c
ii
-4 -3 -2 -1 0 1 2 -3
-2
-1
0
1
2
3
Real Axis
Ima
g
Axis
S
S
1 2 3
3. Habiendo deformado el LDR para que pase por el punto deseado, se calcula el
valor de la ganancia, aplicando el criterio del módulo, para posicionar los polos
dominantes en ese punto.
07,5
15,28,04
38,23,14
23,04
12,27,04
321
2
2
3
2
2
2
1
z
z
d
dddK
d
d
d
d

Ajuste de un regulador proporcional-derivativo (PD ideal)
El valor de K será igual al de la ganancia del regulador, de forma que éste tendrá
finalmente la siguiente función de transferencia:
72,1207,507,572,12)51,2(07,5)( pd KyTsssR
Time (sec.)
Am
plit
ud
e
Step Response
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8 From: U(1)
To: Y(1)
No regulado Regulación PD
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 -3
-2
-1
0
1
2
3 Root Locus Design
Imag A
xes
Real Axis
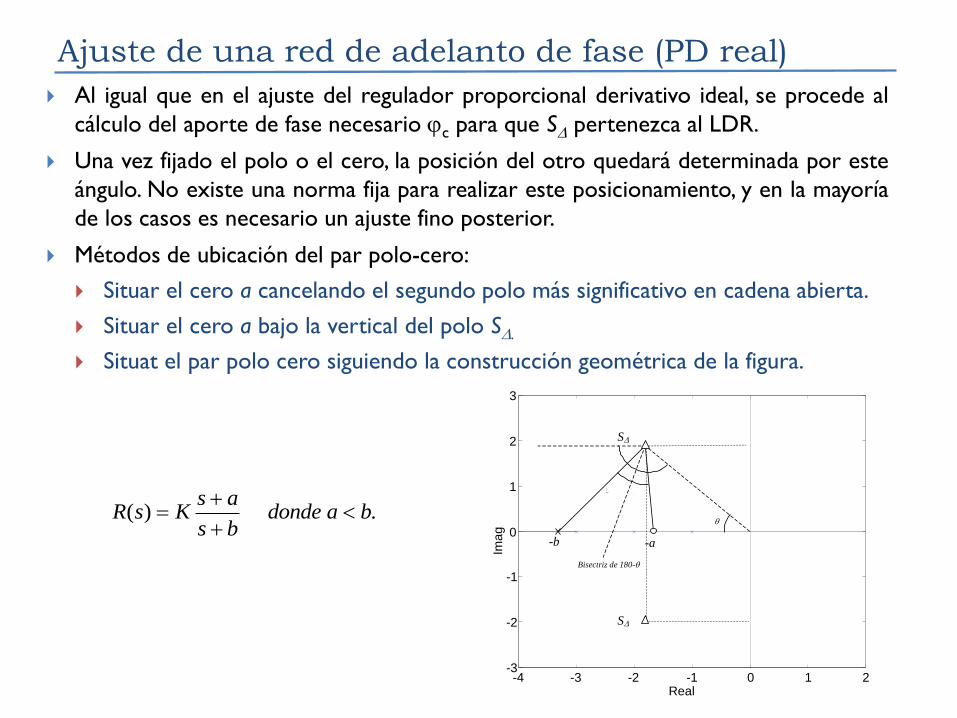
Ajuste de una red de adelanto de fase (PD real)
Al igual que en el ajuste del regulador proporcional derivativo ideal, se procede al
cálculo del aporte de fase necesario c para que S pertenezca al LDR.
Una vez fijado el polo o el cero, la posición del otro quedará determinada por este
ángulo. No existe una norma fija para realizar este posicionamiento, y en la mayoría
de los casos es necesario un ajuste fino posterior.
Métodos de ubicación del par polo-cero:
Situar el cero a cancelando el segundo polo más significativo en cadena abierta.
Situar el cero a bajo la vertical del polo S.
Situat el par polo cero siguiendo la construcción geométrica de la figura.
.)( badondebs
asKsR
-4 -3 -2 -1 0 1 2 -3
-2
-1
0
1
2
3
Real Axis
Ima
g
Axis
S
S
-b -a
2
c 2
c
Bisectriz de 180-
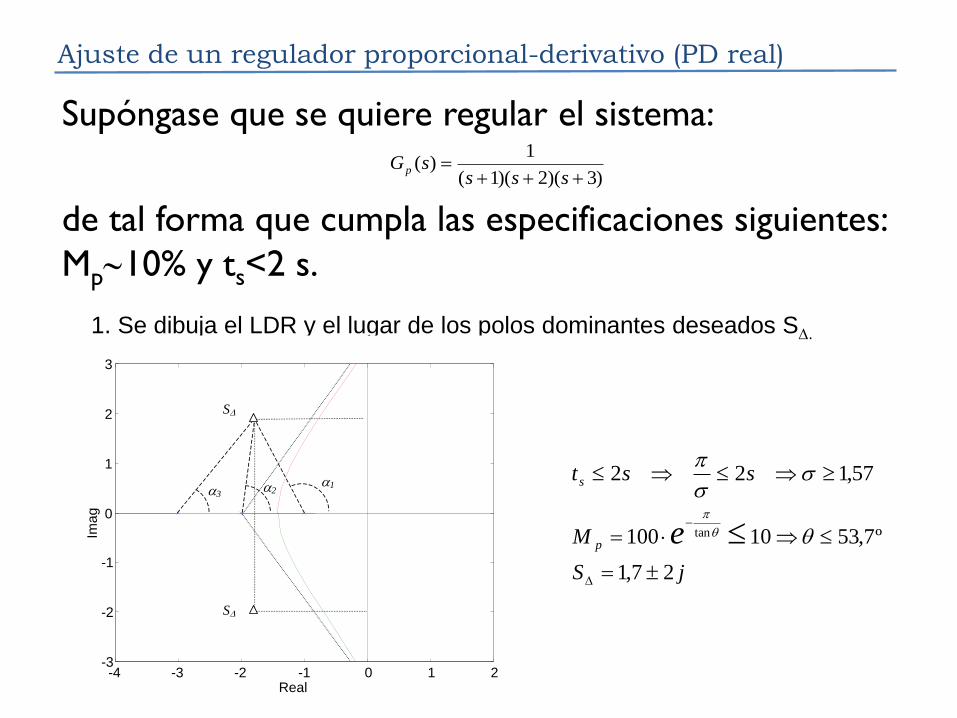
Ajuste de un regulador proporcional-derivativo (PD real)
Supóngase que se quiere regular el sistema:
de tal forma que cumpla las especificaciones siguientes:
Mp10% y ts<2 s.
)3)(2)(1(
1)(
ssssGp
1. Se dibuja el LDR y el lugar de los polos dominantes deseados S.
-4 -3 -2 -1 0 1 2 -3
-2
-1
0
1
2
3
Real Axis
Ima
g
Axis
S
S
1 2 3
jS
M
sst
ep
s
27,1
º7,5310100
57,122
tan

Ajuste de un regulador proporcional-derivativo (PD real)
2. Mediante la aplicación del criterio del argumento, se introduce un cero-polo de forma
que las ramas del LDR pasen por el punto S. Para ello se calcula el ángulo que debe
aportar el cero-polo adicional para que S pertenezca al LDR. Obtenido el ángulo de
compensación.
º7,67
1805747,813,109180
º180111
c
iic
c
• Se situa el cero a cancelando el segundo polo más significativo en cadena
abierta. Para el caso del ejemplo se debe cancelar el polo situado en –2:
86,9
55,82
7,1arctan7,67
2
7,12arctan
2
7,1arctan
b
b
bc
• Situar el cero a bajo la vertical del polo S. Para el caso del ejemplo, a se situaría en
el valor –1,7.
57,6
2
7,1arctan
b
bc

Ajuste de un regulador proporcional-derivativo (PD real)
• Se situa el par polo cero siguiendo la construcción geométrica de la
figura. Esta disposición logra que la ganancia de la red sea la mínima
posible para el aporte de fase deseado.
21,52
7,1
2tan
44,12
7,1
2tan
53
bb
aa
c
c
-4 -3 -2 -1 0 1 2 -3
-2
-1
0
1
2
3
Real Axis
Ima
g
Axis
S
S
-b -a
2
c 2
c
Bisectriz de 180-

Ajuste de un regulador proporcional-derivativo (PD real)
3. Mediante la aplicación del criterio del módulo, se calcula la ganancia K que
posiciona los polos dominantes del sistema en el lugar S deseado. Por la
cancelación, sólo cuenta los polos en –1,-3, y –9,86
42
16,84
3,14
7,04
321
2
3
2
2
2
1
dddK
d
d
d
Por tanto, finalmente la red de adelanto de fase adoptará la forma siguiente:
86,9
242)(
s
s
bs
asKsR
y simulando el sistema con MatLab se obtiene:
Time (sec.)
Am
plit
ude
Step Response
0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
From: U(1)
To: Y
(1)
%10
98,1
%41
p
s
p
M
st
e

Ajuste de una red de retraso de fase (PI real)
No es posible implementar un integrador.
Se implementa mediante una red de retraso de fase.
Esta red proporciona una ganancia suficientemente
grande como para lograr las especificaciones del error en
régimen permanente requeridas. Dicha red debe ser
situada de forma que su efecto no altera la forma del
lugar de las raices y por tanto sobre su comportamiento
transitorio, el efecto sea mínimo.

Ejemplo ajuste de una red retraso de fase
Supóngase que se quiere regular el sistema:
de tal forma que cumpla las especificaciones siguientes:
Mp<15%, ts<2 s y ep<10%.
)2)(1(
1)(
sssG
1. Se ajusta la acción proporcional de forma que los polos se sitúen en el
punto de funcionamiento deseado:
22,051,31
1
1
1
01,7
57,1º8,586,257,1
p
pK
e
K
jS
2. Calcular la ganancia estática del par polo cero, de forma que Kp cumpla
con la condición exigida
57,22
1)()(lim
91
11,0
0
b
a
b
aKsGsRK
KK
e
sp
p
p
p

Ejemplo ajuste de una red de retraso de fase
3. Se posiciona el cero a una década por debajo del polo más cercano al
origen en cadena abierta: 04,0
57,21,0
10
1
aba
-2 -1.5 -1 -0.5 0 0.5 1 -3
-2
-1
0
1
2
3 Root Locus Design
Ima
g A
xe
s
Real Axis Time (sec.)
Am
plit
ude
Step Response
0 2 4 6 8 10 12 14 16 18 20 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 From: U(1)
To: Y(1)
04.0
1.07)(
s
ssR
Este punto de trabajo es un
punto de comienzo que permite
realizar ajustes posteriores. Se
Deberá desplazar el par polo-
cero más a la izquierda en el
lugar de las raices,
manteniendo el aporte de
ganancia. Si se ajusta el cero a
un cuarto del polo dominante
del sistema en cadena abierta,
se obtiene:
Time (sec.)
Am
plit
ude
Step Response
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
From: U(1)
To: Y
(1)
%11
6,2
%9
p
s
p
M
st
e

Flujograma sobre reguladores PID con LDR Dibujar LDR.
Calcular S
¿S LDR? Ajustar K
¿Cumple ep?
Fin
P
Necesaria acción Integral.
s
bsKsR
)(
Ajustar b a 1/4...1/10 del polo dominante en cadena abierta.
Reajustar K
Fin
PI
¿ep pequeño?
Necesaria acción Integral.
s
bsKsR
)(
Ajustar b para que S
pertenezca al LDR
Ajustar K Ajustar K
Desdoblamiento del cero
Fin
PI Fin
PID
Necesaria acción derivativa )()( asKsR
Ajustar a para que S
pertenezca al LDR
¿Cumple ep?
Fin
PD
Ajustar K
Necesaria acción Integral. s
asbsKsR
))(()(
Ajustar b a 1/4...1/10 del polo dominante en cadena abierta.
Reajustar K
Fin
PID
SI
SI
SI
NO
NO
NO
NO
SI

Problema El seguidor de tensión de la figura está constituido por un amplificador
operacional real. El AO tiene una ganancia de tensión diferencial en cadena
abierta en continua, Ado(0) de 100dB y dos polos a frecuencia de 10 Hz y
100kHz. Debajo del seguidor de tensión se ha representado el diagrama a
bloques. En este primer caso, la red de realimentación del operacional es la
unidad, = 1. Se pide:
1. Margen de fase del seguidor de tensión.
2. Para mejorar la estabilidad se ha añadido la red de compensación R1-C1-
R2. Ésta funciona como red de retraso de fase. Calcular el valor de R1 y
R2 de la red de compensación, si se desea tener un margen de fase de
50º. El valor de la red es:
1211
111
CRRj
CRj
Dato: C1 = 10 nF.

Resolución
Diagrama de Bode de la cadena abierta y estabilidad Bode Diagram
Frequency (Hz)
100
101
102
103
104
105
106
-180
-135
-90
-45
0
System: g1
Frequency (Hz): 5.8e+004
Phase (deg): -120
System: g1
Phase Margin (deg): 18
Delay Margin (sec): 1.62e-007
At frequency (Hz): 3.08e+005
Closed Loop Stable? Yes
Phase (
deg)
-20
0
20
40
60
80
100
System: g1
Frequency (Hz): 5.8e+004
Magnitude (dB): 23.4
Magnitu
de (
dB
)
º181010
180
76.3081
101
101
10
5
2
5
2
5
gg
g
gg
do
farctg
farctg
kHzf
ff
ffA

Diseño
La nueva frecuencia de cruce será cuando el desfase es de alrededor de
-120º, lo que supone una nueva frecuencia de ganancia de 58kHz. La
frecuencia del cero de la RRF estará separada al menos una década y se
requiere una atenuación de 14.62;
kRkR
Hzf
ff
fAf
fRRFp
RRFp
g
gdo
g
RRFz
397.2
4001
62.1410
21
,
,,
-80
-60
-40
-20
0
20
40
60
80
100
Magnitude (
dB
)
Bode Diagram
Frequency (Hz)
10-1
100
101
102
103
104
105
106
107
-180
-135
-90
-45
0
System: untitled1
Phase Margin (deg): 54.9
Delay Margin (sec): 2.69e-006
At frequency (Hz): 5.66e+004
Closed Loop Stable? YesPhase (
deg)

Problema
El control remoto de un vehículo tiene el diagrama de bloques de la figura. Se trata de
ajustar el valor K del regulador de retraso de fase. Se pide:
1. Determinar el margen de fase para tres valores de K: 5, 10 y 20, sabiendo que las
frecuencias de cruce de ganancia son 2.6, 3.5 y 4.8 [rad/s] respectivamente (1
punto).
2. Dibujar el diagrama de Bode de la cadena abierta para K con valor 10, conociendo
que la frecuencia de cruce de fase tiende a infinito (1 punto).
3. Estimar los valores más significativos de la respuesta en cadena cerrada ante una
entrada en escalón, utilizando la información de la cadena abierta para K: 5, 10 y 20.
Dibujar aproximadamente la señal de salida ante la entrada en escalón con los tres
valores de K (2.5 puntos).
4. Razonar cuál sería el valor de K más adecuado de los tres propuestos (0.5 puntos).

Problema
-60
-40
-20
0
20
Mag
nitu
de (d
B)
Bode Diagram
Frequency (rad/sec)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Phas
e (d
eg)
2. Dibujar el diagrama de Bode de la cadena abierta para K con valor 10, conociendo que la frecuencia
de cruce de fase tiende a infinito (1 punto).
1. Determinar el margen de fase para tres valores de K: 5, 10 y 20, sabiendo que las frecuencias de
cruce de ganancia son 2.6, 3.5 y 4.8 [rad/s] respectivamente (1 punto).

Problema
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 120
0.5
1
1.5
3. Estimar los valores más significativos de la respuesta en cadena cerrada ante una entrada en escalón,
utilizando la información de la cadena abierta para K: 5, 10 y 20. Dibujar aproximadamente la señal de
salida ante la entrada en escalón con los tres valores de K (2.5 puntos).

Problema
4. Razonar cuál sería el valor de K más adecuado de los tres propuestos (0.5 puntos).
La mejor solución es K=5 ya que tiene un margen de fase de 45º, aunque tiene un error de más
del 28%.
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 120
0.5
1
1.5






























