Embed Size (px)
Citation preview

Camera Model &
Camera Calibration
Slides are from Marc Pollefeys @ETH

TT ZfYZfXZYX )/,/(),,(
101
0
0
1
Z
Y
X
f
f
Z
fY
fX
Z
Y
X
Pinhole camera model
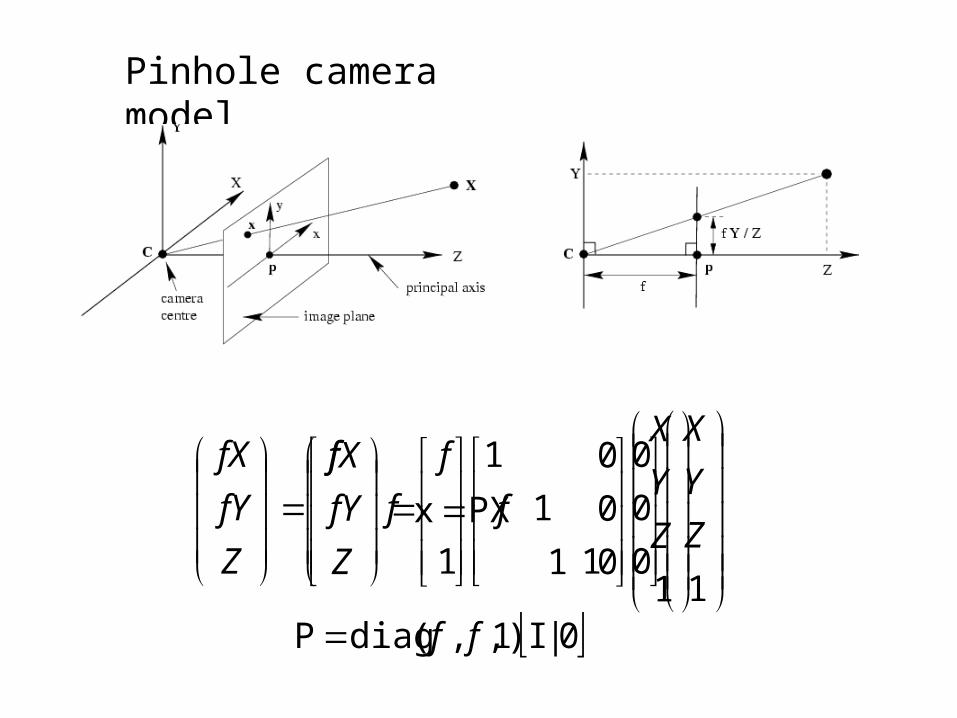
Pinhole camera model
101
0
0
Z
Y
X
f
f
Z
fY
fX
101
01
01
1Z
Y
X
f
f
Z
fY
fX
PXx
0|I)1,,(diagP ff
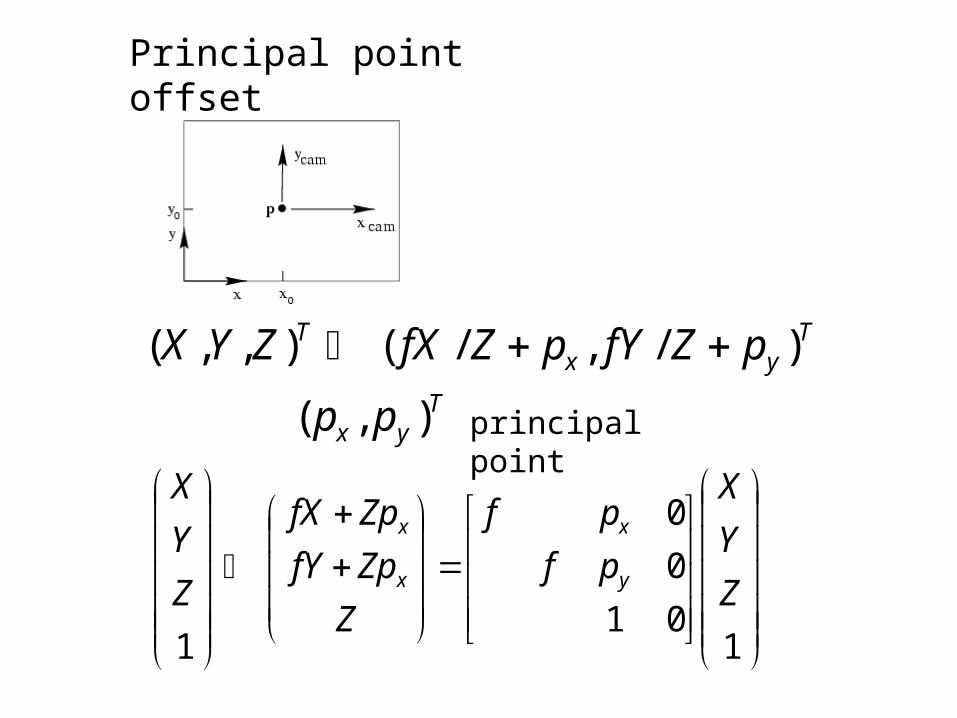
Principal point offset
Tyx
T pZfYpZfXZYX )/,/(),,(
principal pointT
yx pp ),(
101
0
0
1
Z
Y
X
pf
pf
Z
ZpfY
ZpfX
Z
Y
X
y
x
x
x

Principal point offset
101
0
0
Z
Y
X
pf
pf
Z
ZpfY
ZpfX
y
x
x
x
camX0|IKx
1y
x
pf
pf
K calibration matrix

Camera rotation and translation
C~
-X~
RX~
cam
X10
RCR
1
10
C~
RRXcam
Z
Y
X
camX0|IKx XC~
|IKRx
t|RKP C~
Rt PXx

CCD camera
1yx
xx
p
p
K
11y
x
x
x
pf
pf
m
m
K
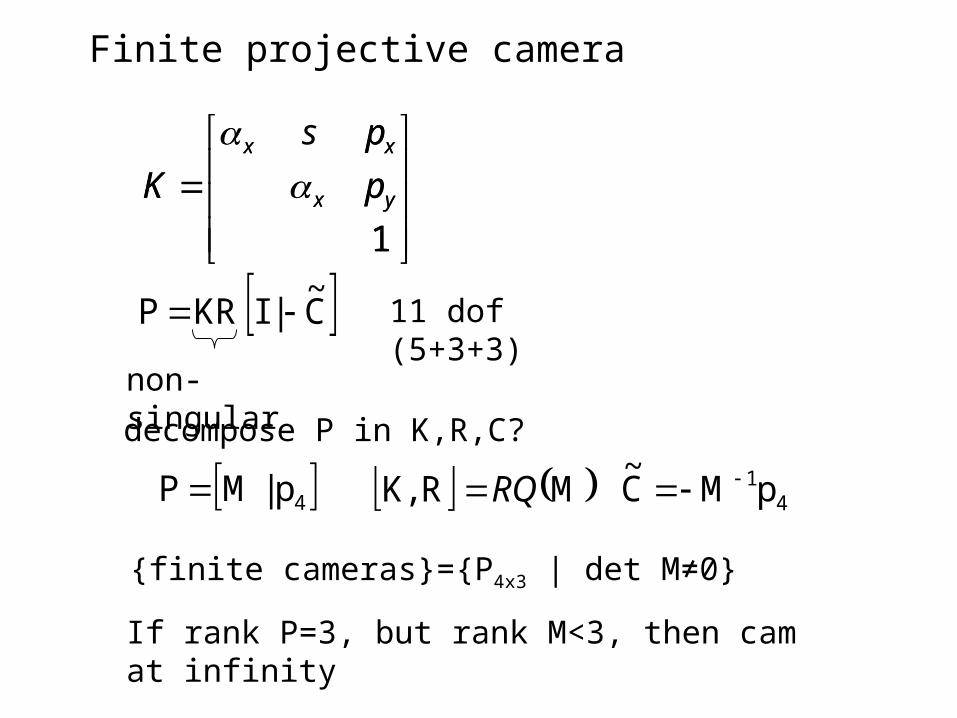
Finite projective camera
1yx
xx
p
ps
K
1yx
xx
p
p
K
C~
|IKRP
non-singular
11 dof (5+3+3)
decompose P in K,R,C?
4p|MP 41pMC
~ MRK, RQ
{finite cameras}={P4x3 | det M≠0}
If rank P=3, but rank M<3, then cam at infinity

Camera matrix decomposition
Finding the camera center
0PC (use SVD to find null-space)
432 p,p,pdetX 431 p,p,pdetY
421 p,p,pdetZ 321 p,p,pdetTFinding the camera orientation and internal parameters
KRM (use RQ decomposition ~QR)
Q R=( )-1= -1 -1QR
(if only QR, invert)

Cameras at infinity
00
dP
Camera center at infinity
0Mdet
Affine and non-affine cameras
Definition: affine camera has P3T=(0,0,0,1)

Affine cameras
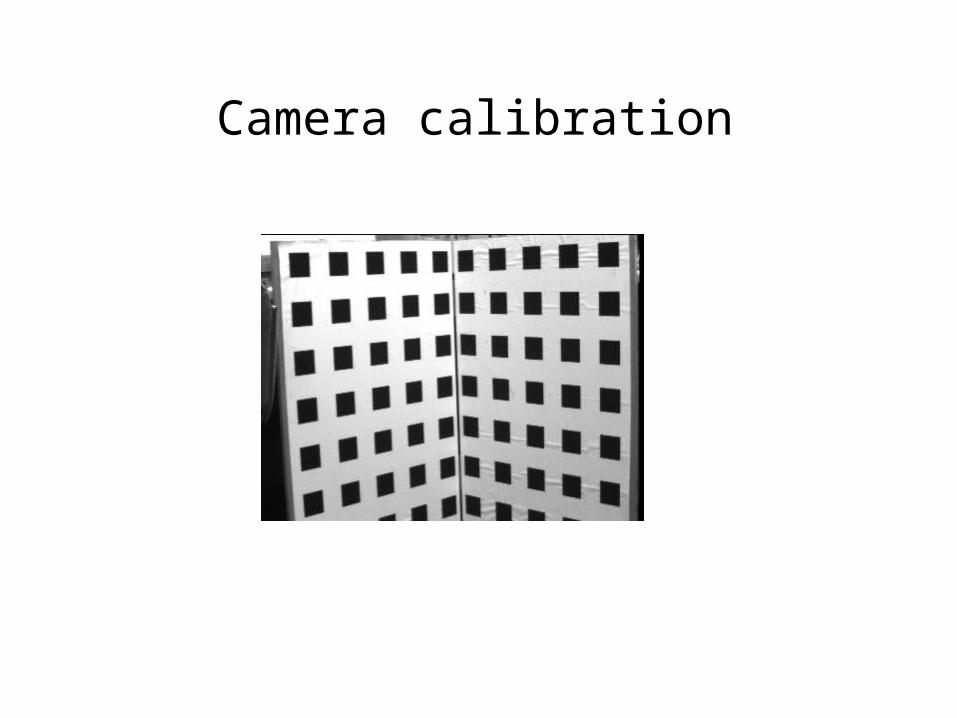
Camera calibration

ii xX ? P
Resectioning

Basic equations
ii PXx
ii PXx
0Ap

Basic equations
0Ap
minimal solution
Over-determined solution
5½ correspondences needed (say 6)
P has 11 dof, 2 independent eq./points
n 6 points
Ap
1p
1p̂3 3p̂P
minimize subject to constraint
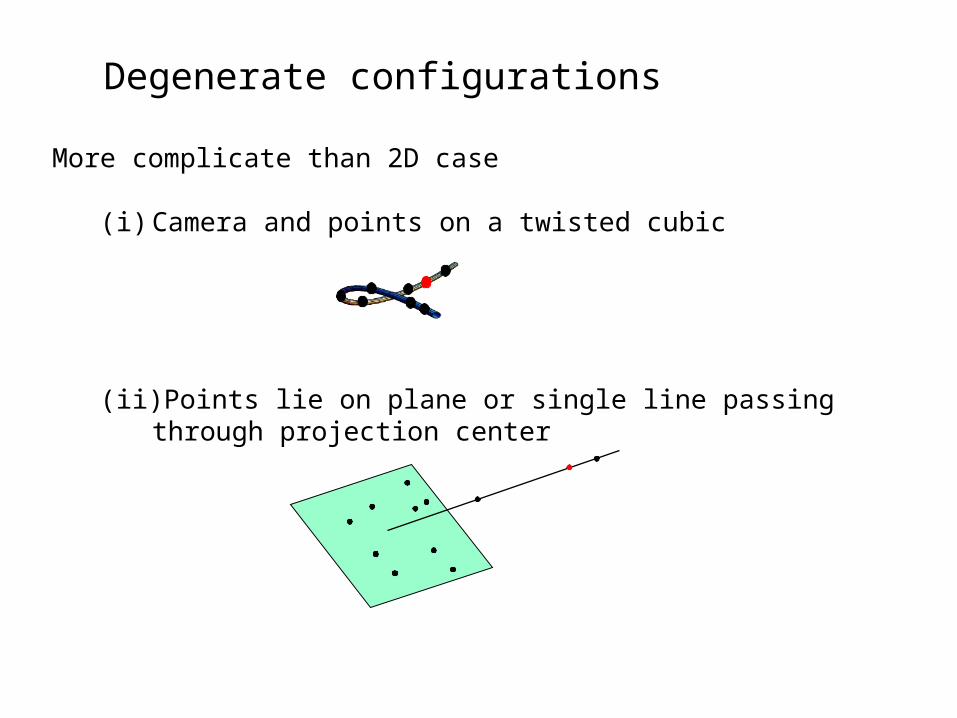
Degenerate configurations
More complicate than 2D case
(i) Camera and points on a twisted cubic
(ii) Points lie on plane or single line passing through projection center
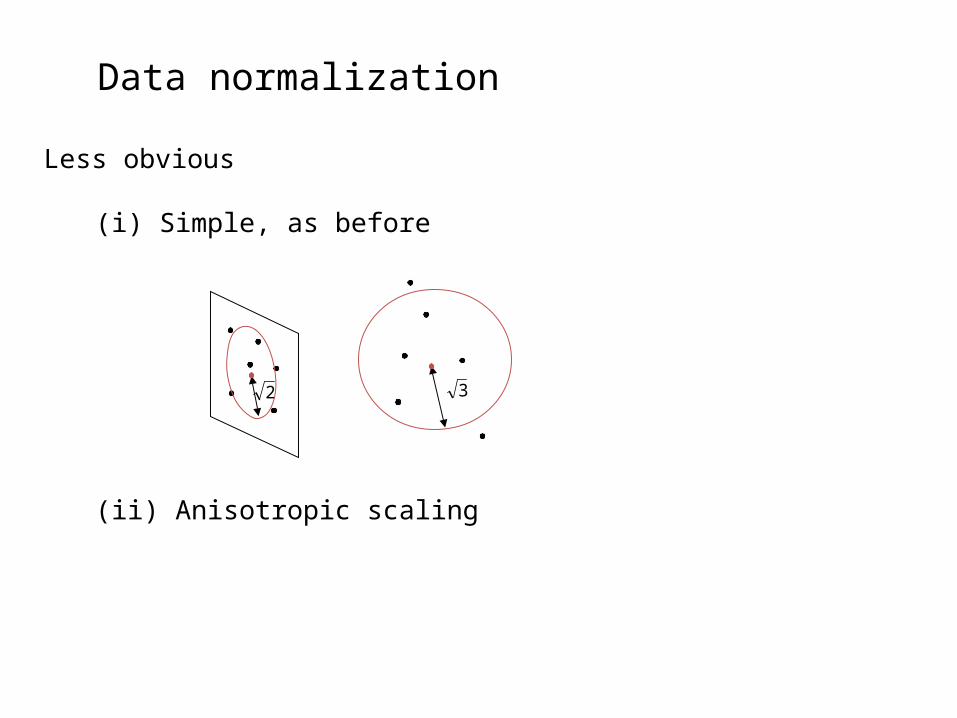
Less obvious
(i) Simple, as before
(ii) Anisotropic scaling
Data normalization
32

Geometric error

Gold Standard algorithmObjective
Given n≥6 2D to 2D point correspondences {Xi↔xi’}, determine the Maximum Likelyhood Estimation of P
Algorithm(i) Linear solution:
(a) Normalization: (b) DLT:
(ii) Minimization of geometric error: using the linear estimate as a starting point minimize the geometric error:
(iii) Denormalization:
ii UXX~ ii Txx~
UP~
TP -1
~ ~~

Calibration example
(i) Canny edge detection(ii) Straight line fitting to the detected edges(iii) Intersecting the lines to obtain the images corners
typically precision <1/10 (HZ rule of thumb: 5n constraints for n unknowns
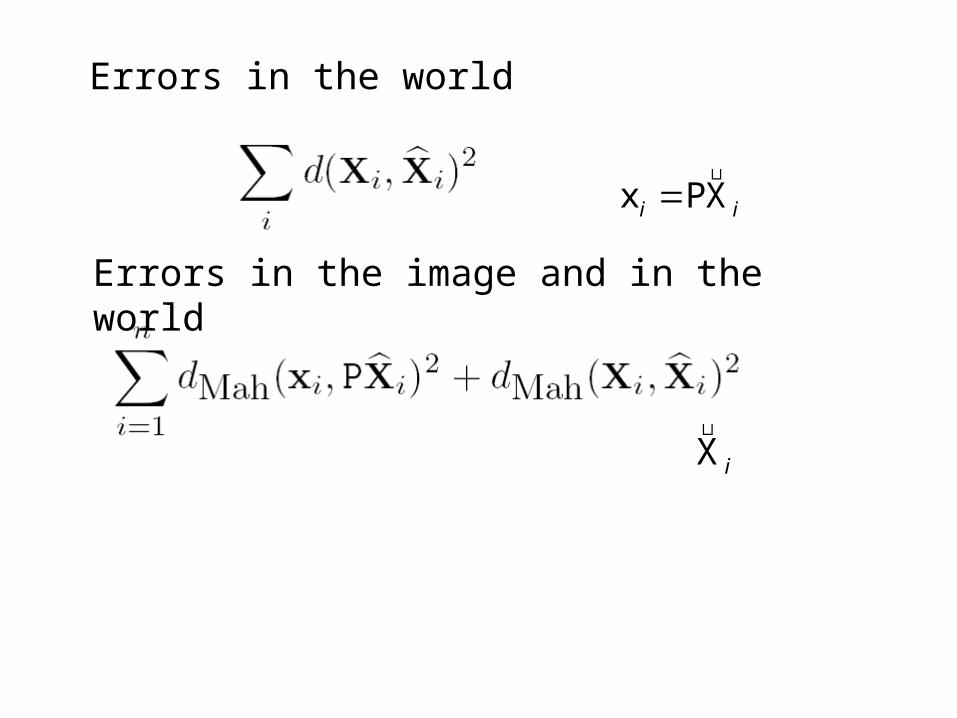
Errors in the world
Errors in the image and in the world
ii XPx
iX

short and long focal length
Radial distortion


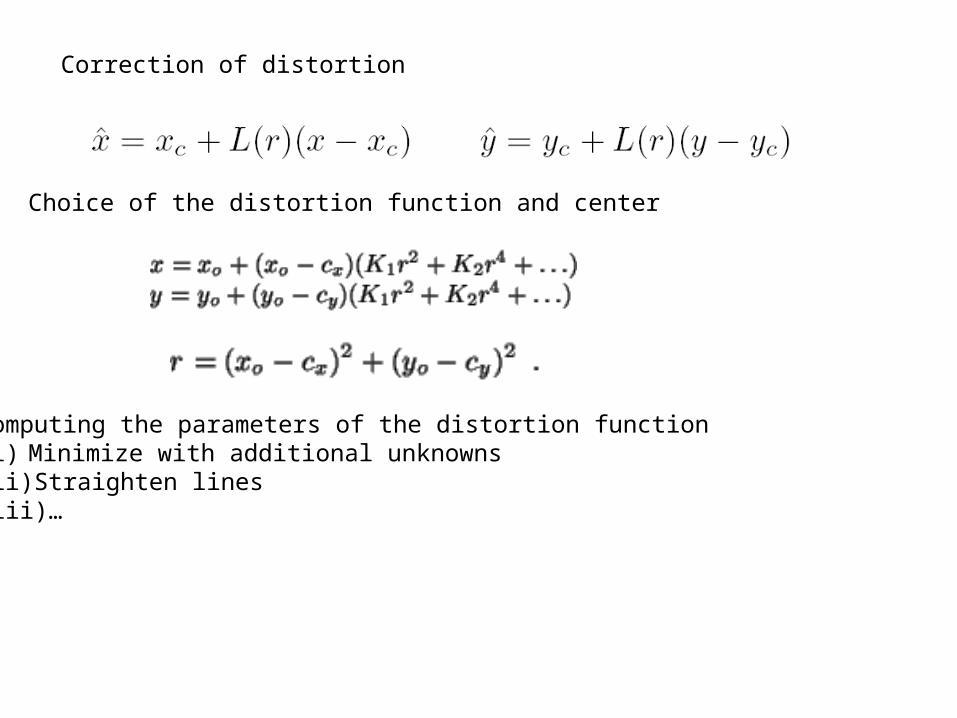
Correction of distortion
Choice of the distortion function and center
Computing the parameters of the distortion function(i) Minimize with additional unknowns(ii) Straighten lines(iii) …





























