Embed Size (px)
Citation preview

Calcolo vettoriale
Elio [email protected]
4 novembre 2012
1 Lo spazio euclideo e i vettori
Non intendiamo in questa sede dare definizioni rigorose e affrontare in modo esauriente lateoria degli spazi euclidei, meno semplice di quanto possa sembrare, ci bastera invece metterein evidenza qualche proprieta di struttura per passare poi allo studio dei vettori geometrici.
Lo spazio euclideo 3-dimensionale e un insieme E di punti nel quale sono assegnate 2famiglie infinite (contenenti cioe infiniti punti) di sottoinsiemi, quella delle rette e quella deipiani, soggette ad un certo numero di assiomi. Due rette di E si dicono parallele se non siintersecano e se sono contenute in uno stesso piano di E . Quattro rette complanari e a due adue parallele in E formano una regione limitata che si chiama parallelogramma.
In E e definita una metrica, la distanza euclidea, che oltre ai tre noti assiomi di ognidistanza soddisfa delle proprieta ulteriori come le seguenti:
- se P , Q, Q′, P ′ sono i vertici di un parallelogramma allora
d(P,Q) = d(P ′, Q′) ,
- per tre punti allineati la disuguaglianza triangolare si riduce ad un’uguaglianza,
- (E , d) e uno spazio metrico completo.
In realta va osservato che la distanza euclidea non e univocamente determinata dalle proprietaprecedenti perche se d e euclidea lo e anche ogni altra distanza d′ proporzionale a d, d′ = kdcon k > 0. Pero e unica se viene fissata un’unita di misura.
La completezza dello spazio e la versione tridimensionale della nota completezza o conti-nuita della retta reale, intuitivamente descrive il fatto che E e un aggregato di punti privo divuoti e lacune.
Alla distanza e associato il gruppo (rispetto all’ordinario prodotto di composizione) delleisometrie di E che chiameremo anche trasformazioni rigide e indicheremo con H. Ricordiamoche un’isometria e un’applicazione Φ : E → E tale che
d(Φ(P ),Φ(Q)) = d(P,Q) ∀P,Q ∈ E .
Una traslazione e un’applicazione τ : E → E tale che per ogni coppia P,Q ∈ E i quattro puntiP , Q, τ(Q), τ(P ) sono, nell’ordine, i vertici di un parallelogramma. Dunque le traslazioni
1
2 Calcolo vettoriale
sono particolari isometrie e costituiscono un sottogruppo commutativo V di H se si supponeovviamente che tra esse figuri anche la funzione identita.
Il carattere commutativo del prodotto di due traslazioni ci induce ad attribuirgli un signifi-cato additivo. Questo aspetto viene reso piu evidente se si interpreta il passaggio dal punto Pal punto τ(P ) come la somma di P con un nuovo ente u che chiameremo vettore. La notazione
(1.1) τ(P ) = P + u ∀P ∈ E
ci permette di identificare ogni traslazione con un solo vettore e viceversa. Non c’e quindialcuna differenza concettuale tra i vettori e le traslazioni, altro che nella notazione, pertantoV sara nel seguito lo spazio dei vettori su E . Scrivendo la (1.1) nella forma u = τ(P ) − P ,oppure u = P ′ − P se P ′ = τ(P ), possiamo interpretare la nozione di vettore come differenzatra punti, intesa nel senso che le due differenze P ′ − P e Q′ − Q coincidono se esiste unatraslazione che porta P in P ′ e Q in Q′. In questo caso diciamo che i due segmenti orientati, ofrecce, PP ′ e QQ′ sono equipollenti e individuano lo stesso vettore u, che infatti viene indicatoanche con u = PP ′. Il vettore nullo, 0, e la traslazione identita, per la quale P ′ = τ(P ) = Pe ogni freccia rappresentativa si riduce ad un punto.
Cosı, posto τ1(P ) = P + u1 e τ2(P ) = P + u2 per ogni P ∈ E , si ha
τ2 ◦ τ1(P ) = (P + u1) + u2 e τ1 ◦ τ2(P ) = (P + u2) + u1 ∀P ∈ E .
D’altra parte, essendo τ2 ◦ τ1 = τ1 ◦ τ2, non vi e nessuna ambiguita nella scrittura
(1.2) τ2 ◦ τ1(P ) = P + u1 + u2 ∀P ∈ E
in cui si fa corrispondere al prodotto di due traslazioni la somma (commutativa), o risultante,dei due vettori u1 e u2 ad esse associati, secondo la ben nota regola del parallelogramma. Na-turalmente per ricorrenza si puo generalizzare la (1.2) alla somma u di k vettori u1,u2, . . . ,ukponendo
P + u = τk ◦ τk−1 ◦ . . . ◦ τ1(P ) .
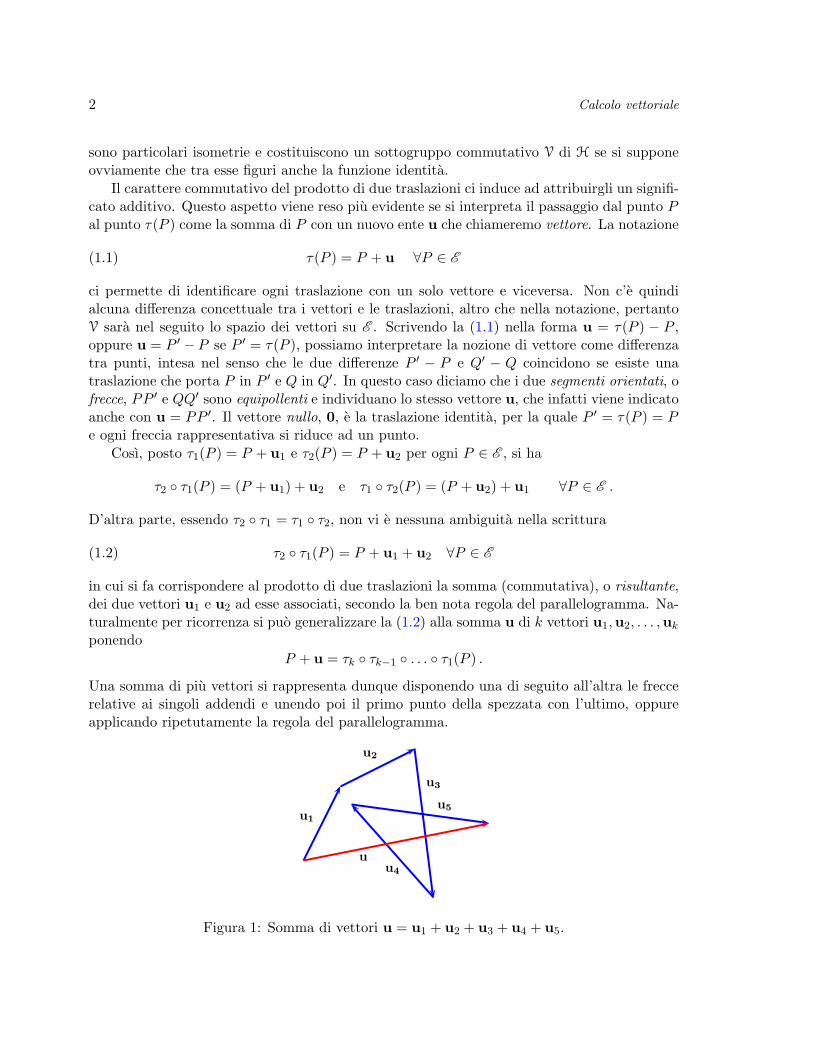
Una somma di piu vettori si rappresenta dunque disponendo una di seguito all’altra le freccerelative ai singoli addendi e unendo poi il primo punto della spezzata con l’ultimo, oppureapplicando ripetutamente la regola del parallelogramma.
u1
u2
u3
u4
u5
u
Figura 1: Somma di vettori u = u1 + u2 + u3 + u4 + u5.

Calcolo vettoriale 3
Se τ(P ) = P + u indicheremo con −u, l’opposto di u, il vettore corrispondente alla tra-slazione inversa τ−1, ossia quel vettore che sommato ad u da 0. Possiamo quindi definire ladifferenza tra u e v come caso particolare della somma ponendo u− v = u + (−v) .
u
v
u! v
Figura 2: Il vettore differenza u− v.
Si definisce il prodotto tra un numero reale λ, che nel contesto dell’algebra vettoriale vienedetto scalare, e una traslazione τ nel seguente modo:
• se τ = i o se λ = 0 allora λτ e l’identita;
• se τ 6= i e λ > 0 allora λτ e la traslazione che porta ogni punto P nel punto (λτ)(P )della semiretta uscente da P e passante per τ(P ) tale che il rapporto tra i segmenti[P, (λτ)(P )] e [P, τ(P )] vale λ;
• se τ 6= i e λ < 0 ci si riconduce al caso precedente ponendo λτ = (−λ)τ−1.
Il prodotto λu si rappresenta allungando del fattore λ una freccia associata ad u, con lo stessoverso se λ > 0 e con verso opposto se λ < 0; se λ = 0 la freccia si riduce ad un punto e ilrisultato dell’operazione e il vettore nullo 0, corrispondente all’identita. Con la somma e ilprodotto per scalari V e uno spazio vettoriale reale.
Il modulo |u| del vettore u = PQ e la sua lunghezza
|u| = d(P,Q) .
Di verifica immediata sono le seguenti proprieta, caratteristiche della nozione di norma in unospazio vettoriale
| · |1. |u| > 0 e |u| = 0⇒ u = 0,
| · |2. |λu| = |λ||u| ∀λ ∈ R , u ∈ V,
| · |3. |u + v| 6 |u|+ |v| ∀u,v ∈ V.
A sua volta il modulo induce su V la struttura di spazio metrico completo con la distanza
d(u,v) = |u− v| ∀u,v ∈ V ,
in particolare |u| = d(u,0). La distanza in V e legata a quella di E in quanto
u = OP e v = OQ⇒ d(u,v) = d(P,Q) .
4 Calcolo vettoriale
Si chiama versore, o vettore unitario, un vettore di modulo 1. Dividendo u 6= 0 per il suomodulo, operazione detta di normalizzazione, si ottiene il versore vers u = u/|u| che ha lostesso orientamento di u e si chiama versore di u.
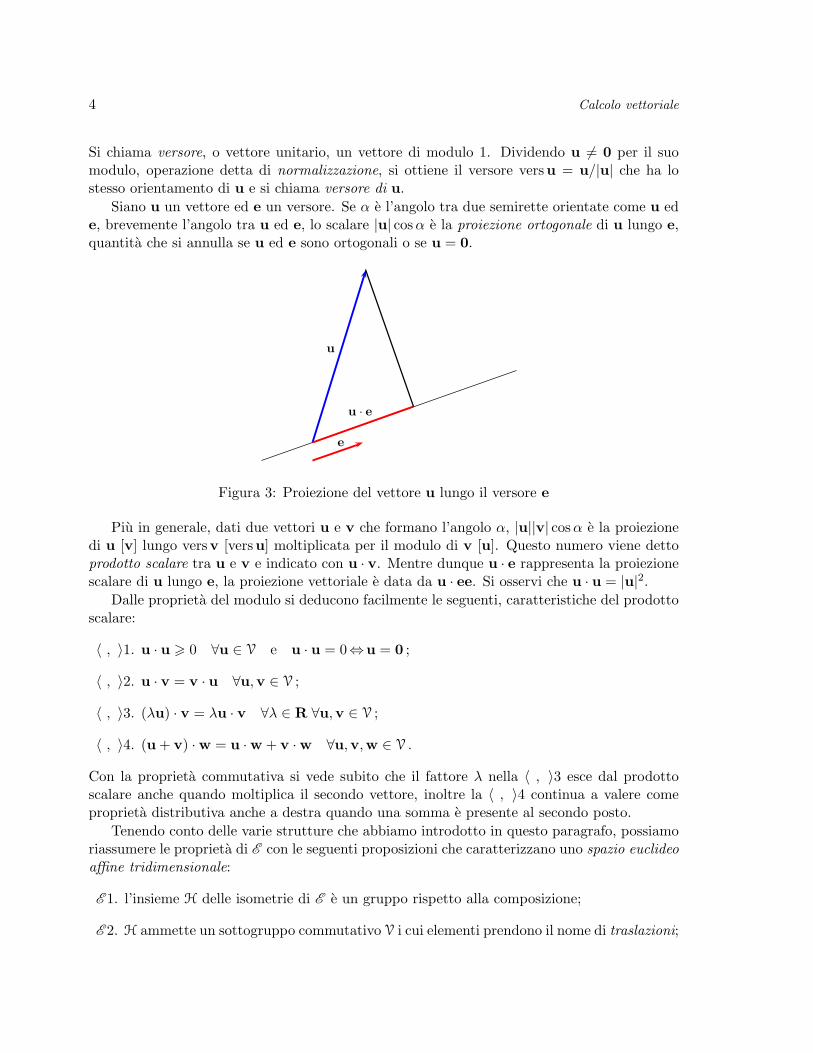
Siano u un vettore ed e un versore. Se α e l’angolo tra due semirette orientate come u ede, brevemente l’angolo tra u ed e, lo scalare |u| cosα e la proiezione ortogonale di u lungo e,quantita che si annulla se u ed e sono ortogonali o se u = 0.
u
u · e
e
Figura 3: Proiezione del vettore u lungo il versore e
Piu in generale, dati due vettori u e v che formano l’angolo α, |u||v| cosα e la proiezionedi u [v] lungo vers v [vers u] moltiplicata per il modulo di v [u]. Questo numero viene dettoprodotto scalare tra u e v e indicato con u · v. Mentre dunque u · e rappresenta la proiezionescalare di u lungo e, la proiezione vettoriale e data da u · ee. Si osservi che u · u = |u|2.
Dalle proprieta del modulo si deducono facilmente le seguenti, caratteristiche del prodottoscalare:
〈 , 〉1. u · u > 0 ∀u ∈ V e u · u = 0⇔u = 0 ;
〈 , 〉2. u · v = v · u ∀u,v ∈ V ;
〈 , 〉3. (λu) · v = λu · v ∀λ ∈ R ∀u,v ∈ V ;
〈 , 〉4. (u + v) ·w = u ·w + v ·w ∀u,v,w ∈ V .
Con la proprieta commutativa si vede subito che il fattore λ nella 〈 , 〉3 esce dal prodottoscalare anche quando moltiplica il secondo vettore, inoltre la 〈 , 〉4 continua a valere comeproprieta distributiva anche a destra quando una somma e presente al secondo posto.
Tenendo conto delle varie strutture che abbiamo introdotto in questo paragrafo, possiamoriassumere le proprieta di E con le seguenti proposizioni che caratterizzano uno spazio euclideoaffine tridimensionale:
E 1. l’insieme H delle isometrie di E e un gruppo rispetto alla composizione;
E 2. H ammette un sottogruppo commutativo V i cui elementi prendono il nome di traslazioni;

Calcolo vettoriale 5
E 3. V e uno spazio vettoriale reale nel quale l’operazione di somma e la composizione;
E 4. V e munito di un prodotto scalare che soddisfa
u · u = d(P,Q)2 per ogni coppia di punti P,Q ∈ E tali che u = P −Q .
Esercizio 1.1 Risolvere l’equazione
(1.3) a · u = b
dove a ∈ V e b ∈ R sono assegnati.
Se a = 0 e b = 0 tutti i vettori u ∈ V sono soluzioni, nessun vettore se a = 0 e b 6= 0.Supponiamo a 6= 0 e decomponiamo u nella somma
u = u⊥ + k vers a
dove u⊥ = u− u · vers a vers a. Sostituendo nell’equazione si ottiene
a · u = a · u⊥ + ka · vers a = k|a| = b ,
da cui k = b/|a|. Ne segue che soddisfano l’equazione tutti e soli i vettori
(1.4) u = v +ba|a|2
al variare di v nello spazio ortogonale ad a. In termini di punti dello spazio euclideo E , postou = P − O e ba/|a|2 = C − O, si ottengono i punti P dell’iperpiano ortogonale a C − O epassante per C. Qual e l’elemento di minima norma di questo iperpiano? Poiche dalla (1.4)si ha
|u|2 = |v|2 +|b|2|a|2 >
|b|2|a|2
per tutti i v ortogonali ad |a|, l’elemento di norma minima e ba/|a|2, quello ortogonale all’i-perpiano stesso, il cui modulo, |b|/|a|, non e altro che la distanza da 0. Il punto O+ ba/|a|2 ela proiezione di O sull’iperpiano.
Esercizi
1. Dimostrare che la funzione u → |u| e lipschitziana e quindi continua, di conseguenzasono continue anche le funzioni u→ u · v e v→ u · v.
2. Dimostrare che ogni isometria Φ : E → E e iniettiva e continua (vedremo piu avantiche e anche surgettiva) e siccome anche l’inversa e un’isometria, ne segue che e unomeomorfismo.
3. Dimostrare che se u · v = 0 per ogni v ∈ V allora u = 0.

6 Calcolo vettoriale
4. Dimostrare le disuguaglianze
|u · v| 6 |u||v| (Schwarz) e ||u| − |v|| 6 |u− v|
e dedurne le stesse conclusioni dell’Esercizio 1.
5. Dimostrare il Teorema di Carnot
|u− v|2 = |u|2 + |v|2 − 2|u||v| cosα ,
dove α e l’angolo tra u e v.
6. Dimostrare che (u − v) · (u + v) = 0 se e solo se |u| = |v|. Darne un’interpretazionegeometrica.
7. Dimostrare l’equivalenza delle seguenti condizioni:
(a) u · v = 0;
(b) |u + tv| = |u− tv| ∀t ∈ R;
(c) |u + tv| > |u| ∀t ∈ R.
8. Dimostrare l’identita del parallelogramma
|u + v|2 + |u− v|2 = 2|u|2 + 2|v|2 .
9. Dimostrare la disuguaglianza di Young
2|u · v| 6 |u|2 + |v|2
e la sua versione piu generale
|u · v| 6 1p|u|p +
1q|v|q
dove p e q sono due numeri reali tali che p, q > 1 e 1/p+ 1/q = 1.
Suggerimento: basta dimostrare che ab 6 1pa
p+ 1q bq con a, b > 0. Porre eξ = ap e eη = bq
e usare la convessita dell’esponenziale.
10. Dimostrare chesupu6=0
a · u|u| = sup
|u|=1a · u = sup
|u|61a · u = |a| .
Osservazioni
Sulla natura di E , sistemi di riferimento - Mettiamo in evidenza alcuni aspetti aspettidello spazio E che lo rendono particolarmente adatto ad essere scelto come modello dellospazio fisico nella Meccanica Classica.
E e omogeneo: cio significa che la distanza e invariante per traslazioni, quindi le proprietametriche di E sono le stesse ovunque. Tutti i punti sono uguali e non vi sono punti privilegiati.
Calcolo vettoriale 7
E e isotropo: in ogni punto le proprieta di E sono le stesse in tutte le direzioni, non visono direzioni privilegiate. Precisamente, la distanza e anche invariante per rotazioni. Piuavanti, caratterizzando le isometrie di E , tratteremo anche le rotazioni.
Grazie all’omogeneita e possibile fissare in modo del tutto arbitrario un’origine O ∈ Erispetto alla quale ogni punto P , ad esempio una particella materiale, viene individuato dalvettore posizione r = P −O. Rispetto ad un’altra origine O′ la stessa particella si trova nellaposizione r′ = P − O′ legata alla precedente dalla relazione r′ = r + O − O′. I punti Pi ∈ E ,aventi le posizioni ri = Pi− 0, relativi alle varie particelle di un sistema materiale formano unsottoinsime di E che si chiama configurazione del sistema. Con la proprieta di completezzapossiamo immaginare che tutti gli aggregati di particelle distribuite in maniera “sufficiente-mente fitta” formino dei corpi continui che ammettono come configurazioni regioni aperte ovarieta di E . Con questo schema la materia viene studiata secondo una scala macroscopicaper la quale i punti di E diventano porzioni “ragionevolmente piccole” di un corpo.
✫✪✬✩
��� �� ��� � ��� ✇✲
Figura 4: Punto di vista del continuo
E un punto di vista, questo, applicabile a tutti gli stati della materia, solido, fluido ecc.,purche il contesto del problema in esame lo permetta, e non e in contraddizione con quellodiscreto particellare, si tratta semplicemente di un modello diverso, quello del continuo. Ilcomportamento delle singole particelle, i loro spostamenti, le reciproche interazioni ecc., vienesostituito da quello del frammento di materia che esse formano, ritenuto abbastanza piccoloda occupare un punto dello spazio.
Grazie all’isotropia, non essendovi direzioni privilegiate, e lecito scegliere una base qual-siasi di V, per semplicita ortonormale, per individuare un vettore posizione mediante lesue componenti. Un’origine O ∈ V e una base {e1, e2, e3} definiscono su E un sistema diriferimento
S = {O; e1, e2, e3}
che ci permette di individuare il punto P rispetto ad O mediante il vettore posizione
r = P −O =3∑i=1
xiei
dove xi = r · ei. Una volta assegnato il sistema di riferimento S si puo anche scrivere senzaambiguita P = (x1, x2, x3).

8 Calcolo vettoriale
2 Prodotto vettoriale
Vogliamo adesso descrivere le proprieta di una nuova operazione tra i vettori dello spazioV. Assegnati due vettori u e v, che formano gli angoli α e 2π − α, sia α quello convesso(senα > 0). Il prodotto vettoriale, detto anche prodotto esterno, u× v e il vettore di modulo|u||v| senα, ortogonale a u e v e avente il verso indicato dalla vite che avanza, con la capocchiain un piano parallelo a u e v, quando si faccia ruotare u verso v dalla parte di α.
Per definizione, il modulo del prodotto vettoriale e l’area del parallelogramma costruitosui due vettori, inoltre u × v = −v × u e si riduce al vettore nullo se e solo se u e v sonoparalleli oppure uno di essi e nullo. Una terna ordinata u, v, w si dice destra (o levogira opositivamente orientata) se u × v ha prodotto scalare positivo con w e sinistra nel caso sianegativo; in particolare u, v, u×v e una terna destra. L’espressione u×v·w, in cui ovviamentesi deve calcolare il prodotto vettoriale prima del prodotto scalare, si chiama prodotto misto;esso e nullo se e solo se i tre vettori sono linearmente dipendenti. Il prodotto misto e il volumecon segno del parallelepipedo che ha per lati u, v e w. Osserviamo che una permutazione paridei tre vettori lascia inalterato il valore del loro prodotto misto, mentre una permutazionedispari ne cambia il segno.
Siano e1 ed e2 due versori ortogonali. Se e3 = e1 × e2 la terna destra A = {e1, e2, e3} euna base ortonormale (destra) per V e
e1 × e2 = e3 e2 × e1 = −e3 e1 × e1 = 0e2 × e3 = e1 e3 × e2 = −e1 e2 × e2 = 0e3 × e1 = e2 e1 × e3 = −e2 e3 × e3 = 0 .
Introdotto il simbolo di Ricci
εijk =
1 se i valori di i, j, k sono, nell’ordine, permutazione pari di 1,2,3−1 se i valori di i, j, k sono, nell’ordine, permutazione dispari di 1,2,30 altrimenti,
le 9 uguaglianze precedenti si possono riassumere tutte insieme nella forma compatta
ei × ej =3∑
k=1
εijkek ∀i, j = 1, 2, 3 .
Queste relazioni tra i versori di A ci permettono di calcolare le componenti del prodottovettoriale
(2.1) u× v = uiei × vjej = uivjei × ej = uivjεijkek
(dove la somma rispetto agli indici ripetuti e sottintesa) da cui, moltiplicando scalarmente pereh, si ottiene la componente h-esima
(2.2) [u× v]h = εhijuivj .
Inoltre
(2.3) u× v ·w = uivjεijkek ·w = εijkuivjwk .

Calcolo vettoriale 9
Dunque le (2.2) e (2.3) coincidono rispettivamente con i determinanti formali
u× v =
∣∣∣∣∣∣e1 e2 e3
u1 u2 u3
v1 v2 v3
∣∣∣∣∣∣ = (u2v3 − u3v2)e1 − (u1v3 − u3v1)e2 + (u1v2 − u2v1)e3 ,
u× v ·w =
∣∣∣∣∣∣u1 u2 u3
v1 v2 v3w1 w2 w3
∣∣∣∣∣∣ = (u2v3 − u3v2)w1 − (u1v3 − u3v1)w2 + (u1v2 − u2v1)w3 .
Per il doppio prodotto vettoriale valgono le seguenti relazioni
(2.4) u× (v ×w) = vu ·w −wu · v e (u× v)×w = vu ·w − uv ·w .
Dimostriamo ad esempio la prima di esse, da cui poi discende subito anche l’altra. Se v×w = 0e banalmente vera. Nel caso contrario, posto v × w = ke, i vettori e, e × v ed e × w sonoindipendenti, per cui esistono scalari α, β e γ tali che
(2.5) u = αe + βe× v + γe×w .
Poiche per definizione di prodotto vettoriale si ha
(e× v)× e = v e (e×w)× e = w ,
usando la (2.5) al primo membro della (2.4) si ottiene
u× (v ×w) = u× ke = (αe + βe× v + γe×w)× ke = βkv + γkw ,
mentre al secondo, essendo u · v = γe×w · v = −γk e u ·w = βk, si ottiene
vu ·w −wu · v = βkv + γkw .
Il prodotto vettoriale non e in generale associativo. Infatti ponendo uguali le due relazionidella (2.4), si vede subito che
u× (v ×w) = (u× v)×w)⇔ uv ·w −wu · v = 0⇔ v × (u×w) = 0
che e verificata quando u e w sono paralleli o quando v e ad essi ortogonale (compreso nelcaso banale in cui uno dei tre vettori e nullo).
Vediamo adesso un metodo per esprimere un vettore u come combinazione lineare de-gli elementi di una base generica A = {a1,a2,a3}. Per calcolare i coefficienti λi nellarappresentazione di u
u = λ1a1 + λ2a2 + λ3a3 ,
moltiplichiamo scalarmente a sinistra e a destra per a2 × a3. In questo modo si trova
u · a2 × a3 = λ1a1 · a2 × a3

10 Calcolo vettoriale
dove possiamo dividere a sinistra e a destra per a1 · a2 × a3 per l’indipendenza degli ai. Indefinitiva si ottiene
(2.6) λ1 =u · a2 × a3
a1 · a2 × a3, λ2 =
u · a3 × a1
a1 · a2 × a3, λ3 =
u · a1 × a2
a1 · a2 × a3.
In altre parole le componenti di u rispetto alla base A coincidono con i prodotti scalari di uper gli elementi del sistema di vettori
A ∗ ={
a1 =a2 × a3
a1 · a2 × a3, a2 =
a3 × a1
a1 · a2 × a3, a3 =
a1 × a2
a1 · a2 × a3,
}che e linearmente indipendente e si chiama base duale di A . Ovviamente valgono le relazioniai · aj = δji e A = A ∗ se e solo se A e ortonormale.
Esercizio 2.1 Risolvere l’equazione
(2.7) a× u = b
dove a e b sono assegnati.
Se a = b = 0 la (2.7) e soddisfatta per ogni u ∈ V e non ha soluzioni se a = 0 e b 6= 0 oppurese a ·b 6= 0. Non rimane che studiare il caso a 6= 0 e a ·b = 0. Posto c = a×b, a, b e c sonoindipendenti, infatti sono a due a due ortogonali, quindi
u = αa + βb + γc
per certi α, β, γ ∈ R. Sostituendo questa espressione nella (2.7) si ottiene
a× (αa + βb + γc) = βa× b + γa× c = βc + γa× (a× b) = βc− γ|a|2b = b
che e verificata per qualsiasi α ∈ R, β = 0 e γ = −1/|a|2. Le soluzioni della (2.7) sono dunquetutti e soli i vettori
u = αa− c|a|2 = αa +
b× a|a|2 , α ∈ R .
In termini di punti dello spazio euclideo E3, posto b×a/|a|2 = C−O e u = P−O, si ottengonotutti i punti P della retta parallela al vettore a e passante per C.
Esercizi
1. Dimostrare le uguaglianze:
(1) δijδjk = δik , (6) εijhεijk = 2δhk ,(2) δijδjhδhk = δik , (7) εijhεijh = 6 ,(3) δijδjhδhkδki = 3 , (8) εijhεkjhεkrs = 2εirs ,(4) δijεijk = 0k , (9) εijhεjhkεhki = 0 ,(5) εijkεrsk = δirδjs − δisδjr , (10) εijhuiuj = 0h ,
dove e sottintesa la somma rispetto agli indici ripetuti.

Calcolo vettoriale 11
2. Dimostrare che il prodotto vettoriale e distributivo in ciascuno dei fattori.
3. Usando la (2.1), dimostrare che
|u× v| = |u||v| senα
dove α e l’angolo (convesso) tra i due vettori.
4. Dimostrare cheei =
12εijkej × ek
per i vettori ei di una terna ortonormale.
5. Dimostrare le identita in V:
(1) u× v · u = 0 ,(2) u× v ·w × z = u · vw · z− u · zv ·w ,(3) |u× v|2 + (u · v)2 = |u|2|v|2 ,(4) u× (v ×w) + v × (w × u) + w × (u× v) = 0 ,(5) u× [(a× v)× (b×w)] + v × [(a×w)× (b× u)] + w × [(a× u)× (b× v)] = 0 ,(6) u× v · (v ×w)× (w × u) = |u · v ×w|2 .
6. Dimostrare che l’area (vettoriale) della superficie di un tetraedro e nulla, cioe
a× b + b× c + c× a + (c− b)× (b− a) = 0 .
Una versione piu generale e la seguente∫Sn(σ)dσ = 0
dove S e una superficie chiusa e n(σ) il campo dei versori normali.
7. Usando il prodotto vettoriale rifare gli esercizi 4 e 6 del §3.
8. Esprimere il vettore u = e1 + 2e2 + 3e3 come combinazione lineare dei vettori
a1 = e1 , a2 = e1 + e2 , a3 = e1 + e2 + e3 .
9. Determinare un versore ortogonale alla giacitura determinata dai vettori
u = e1 + e2 e v = e1 + e2 + e3 .
10. Verificare che la componente ortogonale di un vettore u rispetto alla direzione di unversore e e data da
u⊥ = e× (u× e) .
11. Dimostrare la (2.4) in componenti usando la (5) dell’Esercizio 1.

12 Calcolo vettoriale
3 Vettori applicati
Sia D una regione dello spazio euclideo. Un’applicazione u : D → V, che dunque associaad ogni punto P ∈ D un vettore u(P ) ∈ V, si chiama campo vettoriale. Se u(P ) e costante,se cioe a tutti corrisponde lo stesso vettore, allora diciamo che u e un campo uniforme.
Sia O un punto di E . Se esistono due vettori a e b tali che
(3.1) u(P ) = a + b× (P −O) ∀P ∈ E
il campo u viene detto equiproiettivo. Ponendo P = O nella (3.1) si ricava a = u(O), inoltre,per differenza con la stessa relazione scritta per un qualsiasi altro punto P ′, si ottiene
(3.2) u(P ) = u(P ′) + b× (P − P ′) ∀P, P ′ ∈ E .
Nel caso particolare b = 0, u(P ) si riduce ad un campo uniforme, ma in ogni caso sonocostanti le due grandezze associate al campo
I = u(P ) · b e µ = u(P ) · vers b vers b =Ib|b|2 se b 6= 0
dette rispettivamente invariante scalare e invariante vettoriale. Osserviamo che, mentre I hasempre senso, ed e nullo quando b = 0 o quando un vettore del campo e ad esso ortogonale,µ e ben definito e sempre parallelo a b solo se b 6= 0 ed e nullo solo quando I = 0.
Se µ esiste il luogo dei punti Q ∈ E tali che
(3.3) u(Q) = µ
e una retta che prende il nome di asse del campo equiproiettivo u(P ). Rispetto ad un puntoO, scriviamo la (3.3) nella forma
a‖ + (a⊥ + b× (Q−O)) = µ
dove a‖ e a⊥ sono le proiezioni vettoriali di a lungo la direzione di b e sul sottospazio ortogonalea b. Allora Q−O soddisfa
(Q−O)× b = a⊥ ,
da cui, essendo b× a⊥ = b× a, si ottiene
Q−O = λb +b× a|b|2
che al variare di λ in R e l’equazione parametrica della retta parallela a b e passante per ilpunto O + b× a/|b|2.
Se adesso nella (3.2) scegliamo per P ′ un punto Q dell’asse il campo puo essere scrittonella forma
u(P ) = µ+ b× (P −Q) ∀P ∈ E
in cui u(P ) risulta decomposto nelle componenti parallela e ortogonale all’asse, quindi se δ(P )e la distanza di P dall’asse si ottiene
|u(P )| =√|µ|2 + |b|2δ(P )2 ∀P ∈ E .

Calcolo vettoriale 13
L’asse del campo rimane cosı caratterizzato come il luogo dei punti Q tali che u(Q) ha mo-dulo minimo; in particolare, se I = 0 l’asse e anche l’insieme di tutti e soli i punti Q tali cheu(Q) = 0.
Un esempio notevole di campo equiproiettivo e il campo vettoriale dei momenti di unsistema di vettori applicati, ma piu avanti incontreremo anche quello delle velocita dei puntidi un sistema rigido.
Si chiama vettore applicato una coppia (A,v) dove A ∈ E e detto punto di applicazione ev ∈ V. Fermo restando che un vettore e sempre una classe di equivalenza di frecce orientate,per rappresentare un vettore applicato in A si sceglie per convenzione una freccia orientata conla coda in A; la retta che la contiene, la retta per A e parallela a v, si chiama retta d’azionedi v.
Dati il vettore applicato (A,v) e il punto P , si chiama momento polare, o semplicementemomento, di v rispetto al polo P il vettore
M(P ) = (A− P )× v .
Ovviamente M(P ) non dipende dalla scelta del punto di applicazione A sulla retta d’azionedi v ed e nullo se e solo se tale retta passa per il polo, oltreche se v = 0. Se oltre a P vieneassegnato un versore e, detta r la retta per P e parallela a e, si chiama momento assiale delvettore applicato (A,v) rispetto a r lo scalare
mr = (A− P )× v · e
che e la proiezione ortogonale su r del momento polare. Ovviamente mr non dipende ne dalla
P
A
v
M(P )
e
r
mr
Figura 5: I momenti polare e assiale di un vettore.
scelta di A sulla retta d’azione di v, ne dalla scelta di P su r ed e nullo se e solo se le due rettesono complanari, oltreche quando v = 0. Infatti se sono parallele mr = 0 perche v ed e sonoparalleli, mentre se sono incidenti, facendo variare A sulla retta d’azione e P su r, possiamoridurre A − P al vettore nullo. Dunque mr 6= 0 se e solo se le due rette sono sghembe. In

14 Calcolo vettoriale
questo caso, scegliendo A e P a distanza minima, A − P risulta ortogonale ad entrambe e,posto d = |AP |, si ottiene
mr = ±d|v| senα
dove α e l’angolo convesso formato da v ed e e naturalmente la scelta del segno dipendedall’orientamento della terna.
Un sistema di vettori applicati e un insieme S di vettori applicati (Ai,vi), i = 1, . . . , n. Ivettori
R =n∑i=1
vi e M(P ) =n∑i=1
(Ai − P )× vi
sono rispettivamente risultante e momento risultante rispetto al polo P del sistema, mentrelo scalare
mr = M(P ) · e
e il momento assiale del sistema rispetto alla retta r parallela ad e e passante per P . Natu-ralmente M(P ) e mr rimangono costanti al variare degli Ai sulle rette d’azione dei rispettivivi e mr anche al variare di P su r, inoltre mr non risente dell’eventuale presenza di vettoriapplicati con rette d’azione complanari ad r.
Il campo vettoriale dei momenti P → M(P ) e equiproiettivo, infatti, scelti ad arbitrioP, P ′ ∈ E , si ha
M(P ) =n∑i=1
(Ai − P )× vi =n∑i=1
[(Ai − P ′) + (P ′ − P )]× vi
= M(P ′) + (P ′ − P )×n∑i=1
vi = M(P ′) + R× (P − P ′) ,(3.4)
pertanto M(P ) soddisfa tutte le proprieta di cui abbiamo gia parlato trattando il caso generale.L’invariante scalare I = M(P ) ·R puo essere nullo perche R = 0, allora M(P ) e uniforme,l’unico caso in cui ha senso di parlare di momento senza specificare il polo, altrimenti, seR 6= 0, perche M(P ) ⊥ R per qualche P (e quindi per tutti). Se R 6= 0 sono ben definitil’invariante vettoriale µ = IR/|R|2 e l’asse che in questo contesto si chiama asse centrale ede formato dai punti Q ∈ E tali che
(3.5) Q−O = λR +R×M(O)|R|2
dove O e un punto di E scelto come origine. Poiche
|M(P )| =√|µ|2 + |R|2δ(P )2 ,
l’asse centrale e il luogo dei punti rispetto ai quali il momento risultante ha modulo minimo,nullo se µ = 0 e al crescere della distanza del polo dall’asse il modulo del momento crescentecon andamento asintotico lineare.

Calcolo vettoriale 15
Un sistema S di vettori applicati, avente risultante R e momento risultante M(P ) al variaredi P ∈ E , viene detto equilibrato se
(3.6) R = 0 e M(P ) = 0 ∀P ∈ E .
E evidente dalla (3.4) che nella (3.6), dove gia R = 0, basta che la condizione sul momento siaverificata in un solo punto. Oppure la (3.6) puo essere interamente sostituita dalla condizioneequivalente che esistano tre punti non allineati P1, P2 e P3 tali che M(P1) = M(P2) =M(P3) = 0. Infatti le relazioni
M(P2) = M(P1) + R× (P2 − P1) e M(P3) = M(P1) + R× (P3 − P1)
diventano in questo caso
R× (P2 − P1) = R× (P3 − P1) = 0 ,
ma R non puo essere parallelo ai due vettori non paralleli P2−P1 e P3−P1 altro che nel casoR = 0.
Diciamo che S e equivalente al sistema di vettori applicati S′, con risultante R′ e campodei momenti M′(P ), se
(3.7) R = R′ e M(P ) = M′(P ) ∀P ∈ E .
Ovviamente due sistemi equivalenti hanno lo stesso invariante scalare e, quando esiste, lostesso invariante vettoriale e lo stesso asse centrale. Osserviamo che la definizione di sistemiequivalenti puo essere ricondotta a quella di sistema equilibrato, infatti, indicando con −S′il sistema ottenuto da S′ sostituendo ogni vettore col suo opposto, risulta in modo ovvio cheS e S′ sono equivalenti se e solo se il sistema S ∪ −S′ e equilibrato. Risulta allora che Se equivalente a S′ se e solo se, essendo uguali le rispettive risultanti R e R′, coincidono irispettivi momenti risultanti rispetto ad un solo polo, oppure sono uguali i momenti di uno edell’altro rispetto a tre punti non allineati.
Per sottolineare l’importanza della teoria dell’equivalenza, supponiamo che i vettori appli-cati abbiano il significato di forze, che e la situazione piu comune. Come vedremo piu avanti,l’effetto meccanico di due sistemi equivalenti di forze applicate ad un corpo rigido e identico,in dinamica come in statica. Si puo comprendere, almeno intuitivamente, questa affermazioneimmaginando di applicare forze assiali opposte alle due estremita di una trave in modo daporla in uno stato di trazione. Se la trave e rigida l’effetto meccanico non varia se uno dei duepunti di applicazione viene spostato lungo l’asse, se invece e deformabile in un caso lo stato ditrazione provoca l’allungamento di tutta la trave, altrimenti solo la parte compresa tra i duepunti di applicazione si allunga, mentre la parte rimanente e soggetta a semplice traslazione.
Consideriamo adesso alcuni esempi notevoli di condizioni di equilibrio e di riduzione alsistema equivalente piu semplice.
Quando il sistema e formato da un solo vettore applicato non c’e niente da dire, non esisteun sistema equivalente piu semplice ed e equilibrato solo se il vettore e nullo. Passiamo a casimeno banali.
16 Calcolo vettoriale
Due vettori applicati - Se le loro rette d’azione s’incontrano in un punto O alloraM(O) = 0, dunque e nullo l’invariante scalare e il sistema dato e equivalente alla risultanteR applicata in O in modo che sia nullo anche il momento di R rispetto a questo punto.Naturalmente la condizione di equilibrio puo verificarsi solo a condizione che le due retted’azione coincidano, con R = 0 naturalmente.
Se le due rette sono parallele e distinte il momento rispetto ad un polo comunque sceltonel piano delle due rette e ortogonale a tale piano, quindi anche in questo caso l’invariantescalare e nullo, ma vi sono due casi possibili che ora vediamo.
A
B
v
!v
M
Figura 6: La coppia (A,v), (B − v)
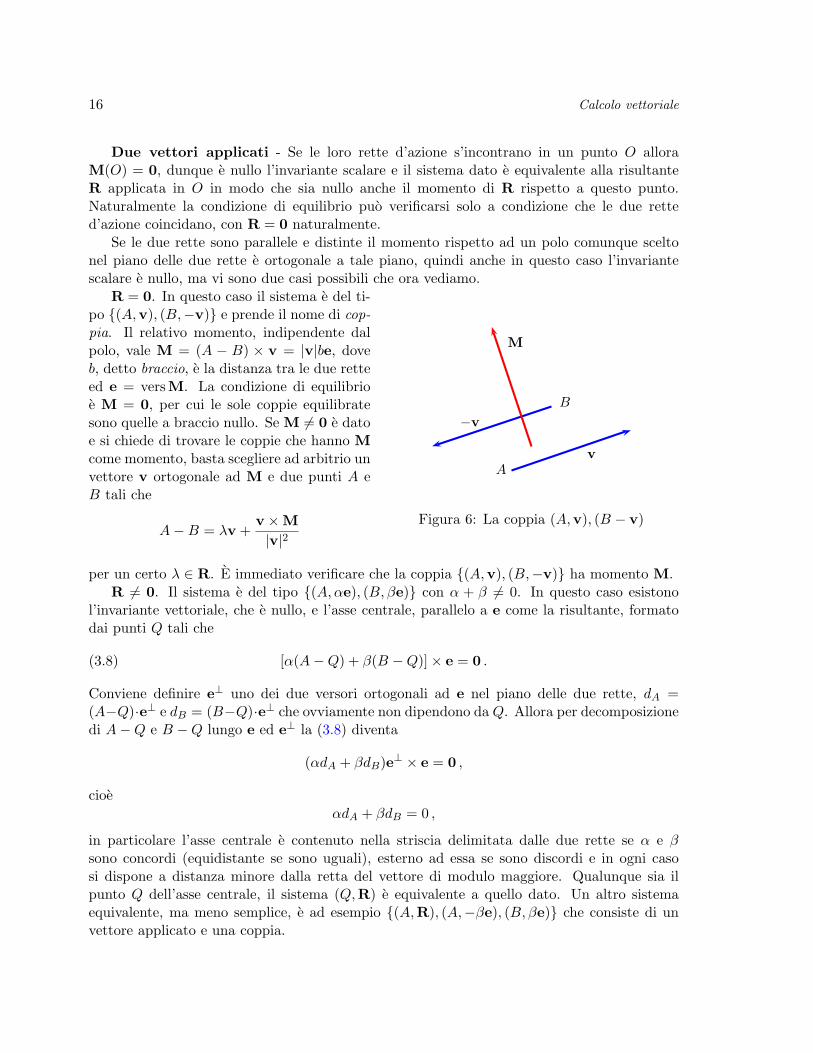
R = 0. In questo caso il sistema e del ti-po {(A,v), (B,−v)} e prende il nome di cop-pia. Il relativo momento, indipendente dalpolo, vale M = (A − B) × v = |v|be, doveb, detto braccio, e la distanza tra le due retteed e = vers M. La condizione di equilibrioe M = 0, per cui le sole coppie equilibratesono quelle a braccio nullo. Se M 6= 0 e datoe si chiede di trovare le coppie che hanno Mcome momento, basta scegliere ad arbitrio unvettore v ortogonale ad M e due punti A eB tali che
A−B = λv +v ×M|v|2
per un certo λ ∈ R. E immediato verificare che la coppia {(A,v), (B,−v)} ha momento M.R 6= 0. Il sistema e del tipo {(A,αe), (B, βe)} con α + β 6= 0. In questo caso esistono
l’invariante vettoriale, che e nullo, e l’asse centrale, parallelo a e come la risultante, formatodai punti Q tali che
(3.8) [α(A−Q) + β(B −Q)]× e = 0 .
Conviene definire e⊥ uno dei due versori ortogonali ad e nel piano delle due rette, dA =(A−Q)·e⊥ e dB = (B−Q)·e⊥ che ovviamente non dipendono da Q. Allora per decomposizionedi A−Q e B −Q lungo e ed e⊥ la (3.8) diventa
(αdA + βdB)e⊥ × e = 0 ,
cioeαdA + βdB = 0 ,
in particolare l’asse centrale e contenuto nella striscia delimitata dalle due rette se α e βsono concordi (equidistante se sono uguali), esterno ad essa se sono discordi e in ogni casosi dispone a distanza minore dalla retta del vettore di modulo maggiore. Qualunque sia ilpunto Q dell’asse centrale, il sistema (Q,R) e equivalente a quello dato. Un altro sistemaequivalente, ma meno semplice, e ad esempio {(A,R), (A,−βe), (B, βe)} che consiste di unvettore applicato e una coppia.
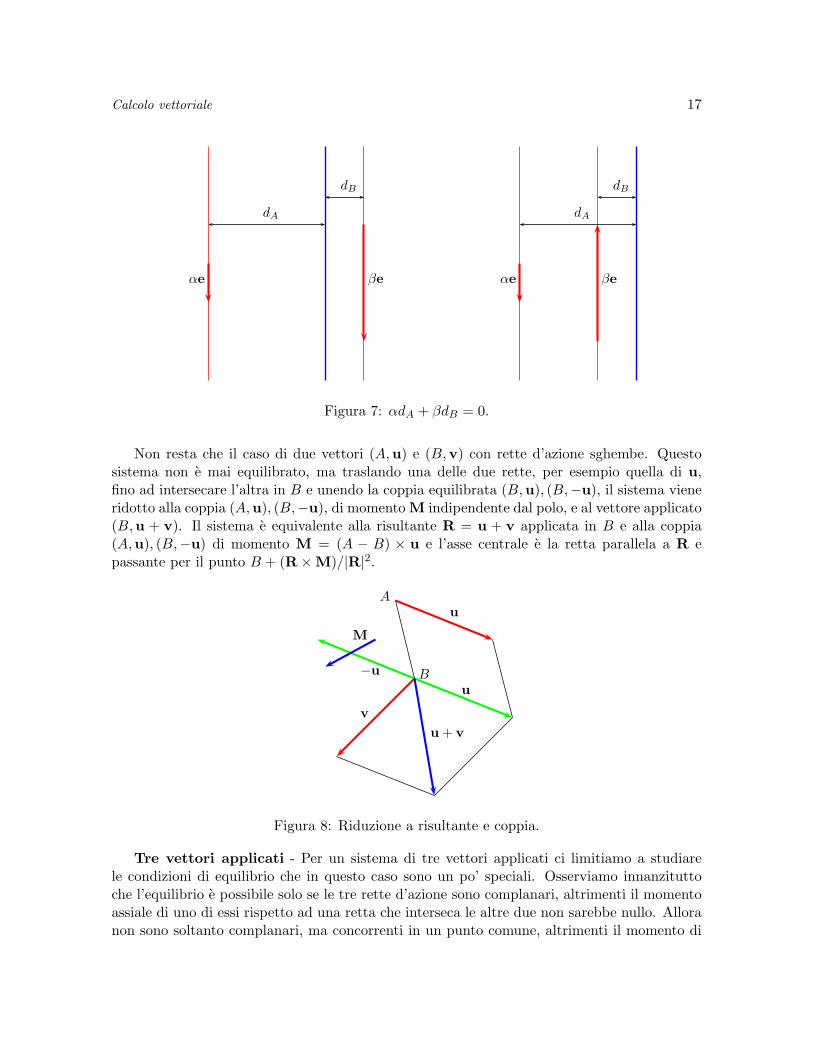
Calcolo vettoriale 17
!e "e
dA
dB
!e "e
dA
dB
Figura 7: αdA + βdB = 0.
Non resta che il caso di due vettori (A,u) e (B,v) con rette d’azione sghembe. Questosistema non e mai equilibrato, ma traslando una delle due rette, per esempio quella di u,fino ad intersecare l’altra in B e unendo la coppia equilibrata (B,u), (B,−u), il sistema vieneridotto alla coppia (A,u), (B,−u), di momento M indipendente dal polo, e al vettore applicato(B,u + v). Il sistema e equivalente alla risultante R = u + v applicata in B e alla coppia(A,u), (B,−u) di momento M = (A − B) × u e l’asse centrale e la retta parallela a R epassante per il punto B + (R×M)/|R|2.
Au
Bu
!u
vu + v
M
Figura 8: Riduzione a risultante e coppia.
Tre vettori applicati - Per un sistema di tre vettori applicati ci limitiamo a studiarele condizioni di equilibrio che in questo caso sono un po’ speciali. Osserviamo innanzituttoche l’equilibrio e possibile solo se le tre rette d’azione sono complanari, altrimenti il momentoassiale di uno di essi rispetto ad una retta che interseca le altre due non sarebbe nullo. Alloranon sono soltanto complanari, ma concorrenti in un punto comune, altrimenti il momento di

18 Calcolo vettoriale
uno dei tre rispetto al punto di incontro delle altre due non sarebbe nullo, a meno che nonsiano parallele, caso che vediamo tra poco per un numero arbitrario di vettori.
Vettori applicati concorrenti - Si tratta di un sistema in cui le rette d’azione passanotutte per uno stesso punto O. Ovviamente M(O) = 0, quindi il sistema e equivalente allarisultante applicata in O e la condizione di equilibrio si riduce a R = 0.
Sistema piano di vettori applicati - E un sistema in cui tutte le rette d’azione sonocontenute in uno stesso piano. L’invariante scalare e nullo perche, rispetto ad un punto O delpiano, il momento di ogni vettore, e quindi il momento risultante, ha direzione ortogonale alpiano. Se la risultante e nulla il sistema e equivalente ad una coppia di momento ortogonaleal piano, altrimenti e parallela al piano e, com’e evidente dalla (3.5) con O scelto nel piano,anche l’asse centrale giace nel piano, pertanto il sistema e equivalente alla risultante applicatalungo l’asse centrale.
Vettori applicati paralleli, centro - Si tratta di un sistema di n vettori del tipo vi = vie,essendo e un versore e vi = v · e, applicati nei punti Ai. Rispetto ad un polo P il momentodi ogni vettore, e quindi il momento risultante M(P ), e ortogonale ad e, pertanto l’invariantescalare e nullo, mentre e parallela ad e la risultante
R =n∑i=1
vie = ve ,
dove v e la somma dei vi. Se R = 0, cioe se v = 0, M(P ) e un campo uniforme M e il sistemapuo essere ridotto ad una coppia di momento M. Se invece v 6= 0 e ben definito l’asse centralecome il luogo dei punti Q tali che
(3.9) M(Q) =n∑i=1
(Ai −Q)× vie =
(n∑i=1
vi(Ai −Q)
)× e = 0
e il sistema e equivalente alla sola risultante applicata lungo l’asse centrale. Per determinarloconviene considerare il centro del sistema che e il punto C per cui passano tutti gli assi centralial variare di e. Tale punto e l’unico dei Q che soddisfa la (3.9) per ogni e, che dunque diventa
n∑i=1
vi(Ai − C) = 0 .
Rispetto ad un punto O di riferimento, si ottiene
n∑i=1
vi(Ai −O)− v(C −O) = 0 ,
da cui
(3.10) C −O =1v
n∑i=1
vi(Ai −O) .
Conoscere la posizione del centro permette di individuare subito l’asse centrale di un sistemadi vettori applicati paralleli, esso e la retta parallela ai vettori e passante per C. Questo

Calcolo vettoriale 19
punto speciale dipende fortemente dai punti di applicazione e puo variare se i vettori applicativengono spostati lungo le loro rette d’azione, mentre l’asse rimane inalterato.
Osserviamo che se i vi hanno tutti lo stesso segno li possiamo supporre positivi senzaalterare la posizione di C. Rientra in questo caso la definizione di centro massa di un insiemedi punti materiali Ai di masse mi
(3.11) G−O =1m
n∑i=1
mi(Ai −O) .
Una proprieta importante del centro di massa, o del centro in generale con l’ipotesi vi > 0, eil fatto di appartenere sempre al piu piccolo insieme convesso, l’involucro convesso, che contienei punti Ai. Infatti siccome tale insieme e l’intersezione di tutti i semispazi che contengono ipunti Ai, basta verificare che, preso un piano π che lascia da una stessa parte tutti gli Ai,anche il centro sta da quella parte. Siano ν il versore normale a π che punta verso il semispaziocontenente gli Ai e O ∈ π. Allora (Ai −O) · ν > 0, pertanto
(C −O) · ν =1v
n∑i=1
vi(Ai −O) · ν > 0 .
Concludiamo il paragrafo con questo schema riassuntivo
Proprieta del sistema dato sistema equivalente
R = 0⇒
M(P ) = M = costante
I = 0µ non esiste
coppia di momento M
R 6= 0 , minP|M(P )| = 0⇒
{I = 0µ = 0
R applicata lungo l’asse
R 6= 0 , minP|M(P )| > 0⇒
{I 6= 0µ 6= 0
R applicata lungo l’asse+
coppia di momento µ
Esercizi
1. Dimostrare che nella (3.10) C e indipendente da O.
2. Se in un sistema di vettori applicati paralleli a risultante non nulla si moltiplica ognivettore per uno stesso scalare allora il centro non varia.
3. Si ripartisca un sistema di vettori applicati paralleli a risultante non nulla in piu sot-tosistemi disgiunti e si consideri, di ciascuno di essi, la risultante applicata nel relativo

20 Calcolo vettoriale
centro. Allora il centro del sistema formato dalle risultanti coincide con quello del sistemadato.
4. Nel piano, rispetto ad un sistema di riferimento {O; e1, e2}, sono dati il vettore u =a(e1 + e2), a > 0, applicato in O e il vettore v = be2, b > 0, applicato in A = O + ae1.Determinare il vettore w e un punto P in modo che il sistema {(O,u), (A,v), (P,w)}sia equilibrato.
5. Trovare il centro del sistema formato dai vettori applicati (A1,u), (A2,−2u), (A3, 4u)con i tre punti allineati su una retta ortogonale ad u e tali che |A1 −A3| = 3|A1 −A2|.
6. Dati i vettori e1−e3, e2−e3 e e1 +e2−e3 concorrenti in A = O+e3, trovare un sistemaequivalente formato da un solo vettore.
7. Tre vettori u, v e w sono applicati lungo i tre spigoli A − O, B − O e C − O di untetraedro regolare. Trovare tre vettori paralleli ae, be e ce applicati in A, B e C tali cheil sistema costituito da tutti e sei i vettori sia equilibrato.
8. Nei punti del segmento O + xe1, 0 6 x 6 l, sono applicati i vettori u(x) = kxe2 e in Oe applicato il vettore ae2. Determinare un vettore pe2 applicato in O e per ogni y ∈ Run vettore qe2 applicato in O + ye1 in modo che il sistema sia equilibrato.
9. Sostituire il sistema {(O, ae1), (A, be2)} con un sistema equivalente formato da un vettoreapplicato e da una coppia.
10. A che cosa puo essere ridotto un campo di vettori del tipo u(P ) = uT(P ), applicati neipunti P di una circonferenza di raggio r, dove u > 0 e T e il versore tangente?
4 Cambiamenti di base
Siano assegnate in V due basi1 A = {ei} e B = {fi}, i = 1, 2, 3. Per ogni u ∈ V siano
(4.1) ui = u · ei e u′i = u · fi
le componenti di u rispetto ad A e a B rispettivamente. Esprimendo nella (4.1) i versori fiin termini degli ei nel solito modo
fi = fi · ejej ,si ottiene
(4.2) u′i = u · (fi · ejej) = fi · eju · ej = fi · ejuj = Qijuj
La (4.2) definisce un’applicazione lineare da R3 in R3 che trasforma la terna delle compo-nenti di ogni vettore u rispetto alla base A in quella delle componenti rispetto alla B ed erappresentata dalla matrice del cambio di base
(4.3) Q = (Qij) = (fi · ej) i, j = 1, 2, 3 ,1Ci occupiamo soltanto di basi ortonormali.

Calcolo vettoriale 21
detta anche matrice dei coseni direttori perche i prodotti scalari che ne definiscono le compo-nenti sono i coseni degli angoli tra i vettori di una base e quelli dell’altra.
Volendo interpretare l’operazione a secondo membro della (4.3) come prodotto righe percolonne, la matrice Q ha per righe i versori di B in componenti rispetto a quelli di A e percolonne i versori di A in componenti rispetto a quelli di B. L’ortonormalita delle righe e dellecolonne si esprime nelle relazioni
(4.4) QijQik = QjiQki = δjk o QTQ = QQT = I
dove QT indica la trasposta di Q e I l’identita, per questo Q si chiama anche matriceortogonale. La (4.4) implica
(detQ)2 = 1
e da quanto detto nel §2 segue che detQ = 1 se le basi A e B hanno lo stesso orientamento,altrimenti detQ = −1. Dunque Q ammette sempre inversa e per la (4.4) si ha
Q−1 = QT .
Esempi:
4.1 Se A = {ei} e B = {−e1, e2, e3} la matrice del cambio di base da A a B e
Q =
−1 0 00 1 00 0 1
.
Cambiando l’orientamento di altri ei si ottengono matrici analoghe.
4.2 Il cambio di base e1 → e2, e2 → e3, e3 → e1 e espresso dalla matrice
Q =
0 1 00 0 11 0 0
.
4.3 La matrice che esprime il cambio di base relativo alla rotazione di un angolo ϑ dei versorie1 ed e2 nel loro piano lasciando fisso e3 e data da
Q(ϑ) =
cosϑ senϑ 0− senϑ cosϑ 0
0 0 1
.
Si ottengono analoghe matrici se rimane fisso e1 oppure e2.
Vediamo adesso come si compongono successivi cambi di base. Siano Q1 e Q2 le matrici deicambi di base da A a B e da B a C rispettivamente, essendo A = {ei}, B = {fi} e C = {gi}.Iterando la (4.2) e indicando con u′′i le componenti di u rispetto a C , si ottiene
(4.5) u′′i = u · gi = u · (gi · fjfj) = u · (gi · fj(fj · ekek)) = Q2ijQ1jkuk = Qikuk

22 Calcolo vettoriale
essendo Q = Q2Q1. Dunque la matrice di due successivi cambi di base e il prodotto righe percolonne delle due matrici relative ai due cambi. Si capisce che la (4.5) puo essere a sua voltaiterata per un numero arbitrario di cambi di base successivi.
Come applicazione consideriamo l’importante caso seguente. Assegnati la base A = {ei}e un versore f non coincidente con alcuno degli ei (per non ricadere in un caso gia visto),vogliamo scrivere la matrice dei coseni direttori che ruota A dell’angolo ϑ, nel senso dellavite orientata come f , fino a disporsi secondo una nuova base A ′ = {hi}. Tenendo presentel’Esempio 4.3, conviene considerare una base “di passaggio” contenente f , ad esempio B ={f1, f2, f3 = f}, e farla ruotare applicando la Q(ϑ) per cui andra a coincidere con una certaB′ = {gi}. Ora, le componenti dei versori di B rispetto ad A coincidono con quelle dei versoridi B′ rispetto ad A ′, pertanto la matrice del cambio di base da B′ ad A ′ e la trasposta dellamatrice Q del cambio di base da A a B. Ricomponendo uno dopo l’altro questi tre cambi dibase, il passaggio da A ad A ′ rimane espresso dalla matrice
Q′(ϑ) = QTQ(ϑ)Q .
Essendo cioe hi = hi · ghgh e gh = gh · fkfk, si ottiene
Q′(ϑ)ij = hi · ej = hi · ghgh · fkfk · ej = QTihQ(ϑ)hkQkj .
La (4.2) ci dice che una terna di numeri e un vettore se soddisfa la legge del cambio di baseperche e questa legge che garantisce il carattere assoluto di una grandezza fisica indipendentedall’osservatore. Da questo punto di vista una grandezza scalare rimane espressa dallo stessonumero reale in qualunque base. Per fare un esempio, se m indica la massa di un punto laterna (m,m,m) non puo indicare un vettore e nessuna delle componenti di un vettore puoessere considerata uno scalare. Invece il prodotto scalare uivi e effettivamente una grandezzascalare se per ipotesi ui e vi sono le componenti di due vettori u e v, infatti
u′iv′i = QihuhQikvk = δhkuhvk = uhvh .
Concludiamo il paragrafo con un problema che nasce studiando la natura delle possibili legidi interazione tra due punti materiali.
Problema 4.1 Quale forma deve assumere una funzione vettoriale F : V→ V affinche laterna F (u) = (Fi(u)) delle sue componenti, con u = (ui), sia invariante rispetto a qualunquecambio di base ortogonale?
Trattandosi di un campo vettoriale, deve valere la condizione
F ′(u′) = QF (u)
dove u′ = Qu. Ma noi richiediamo in piu che F ′ = F , quindi
(4.6) F (Qu) = QF (u) .
Scegliamo allora una terna u 6= 0 e una matrice Q di coseni direttori diversa dall’identita eche ammetta come unica direzione unita quella di u. Allora
F (u) = F (Qu) = QF (u) ,

Calcolo vettoriale 23
quindi Q lascia in se anche la direzione di F (u) che non puo che essere la stessa di u. Esistepertanto un campo scalare ϕ : R3 → R tale che
F (u) = ϕ(u)u .
Mostriamo che in realta ϕ dipende soltanto dal modulo di u che indichiamo con |u|, per questodiciamo che e a simmetria sferica. Siano infatti u, v ∈ R3 due terne non nulle con lo stessomodulo e Q un’altra matrice ortogonale tale che v = Qu. Dalla (4.6) si ottiene
ϕ(v)v = ϕ(Qu)Qu = Qϕ(u)u = ϕ(u)v ,
quindi ϕ(u) = ϕ(v). Il campo vettoriale e necessariamente del tipo
F(u) = ϕ(|u|)u .
Esercizi
1. Quali delle seguenti matrici rappresentano dei cambiamenti di base?0 0 10 1 01 0 0
,
1/√
2 0 1/√
20 1 0
1/√
2 0 1/√
2
,
1/2 0 −√
3/2√3/7
√3/7 1/
√7
3/2√
7 −2/√
7√
3/2√
7
,
senϑ cosϑ 0− cosϑ senϑ 0
0 0 1
,
cosϑ 0 senϑ0 1 0
senϑ 0 − cosϑ
,
1 0 00 a(a2 + b2)−1/2 b(a2 + b2)−1/2
0 −b(a2 + b2)−1/2 a(a2 + b2)−1/2
.
2. Scrivere le matrici dei seguenti cambi di base {ei} → {fi}f1 = vers(e2 + e3)f2 = vers(e2 − e3)f3 = e1
,
f1 = vers(e1 + e2 + e3)f2 = vers(3e1 − e2 − 2e3)f3 = f1 × f2
,
f1 = vers(2e1 − 2e2 + 3e3)f2 = vers(3e1 − 2e3)f3 = f1 × f2
,
f1 = vers(4e1 + e2 + 2e3)f2 = vers(e1 − 2e2 − e3)f3 = f1 × f2
.
3. Dimostrare che il prodotto di due cambiamenti di base con lo stesso asse di rotazione ecommutativo. Costruire un controesempio per mostrare che cio e falso in generale.
4. Calcolare a, b, c ∈ R tali che la matricea a ab −b 0c c −2c
rappresenti un cambio di base.

24 Calcolo vettoriale
5. Calcolare le nuove componenti del vettore u = 2e1 + 4e2 − e3 in seguito alla rotazionedella base di un angolo di π/4 attorno al vettore w = e1 + e2 + e3 nel senso della viteche avanza come w. Riprovare con u e w scelti a piacere.
6. Trovare tutti i vettori che mantengono inalterate le loro componenti in seguito al cambiodi base dell’Esercizio 5.
7. Scrivere la matrice di un cambio di base tale che due delle nuove componenti del vettoreu = 3e1 − 4e2 + 2e3 siano nulle.
8. Trovare per ognuna delle seguenti coppie di vettori la matrice di un cambio di base cheannulli il massimo numero delle loro componenti simultaneamente
u = 3e1 − 4e2 + 2e3 , v = e1 − e2 + e3
u = e1 − 3e2 − 2e3 , v = e1 + e2 − e3
u = 7, 5e1 − 3e2 − 3, 7e3 , v = 15e1 − 6e2 − 7, 4e3 .
5 Tensori
Si dice tensore ogni applicazione lineare A : V→ V. L’immagine di un vettore u si indicacon Au e per definizione A soddisfa la proprieta
A(λu + µv) = λAu + µAv ∀u,v ∈ V ∀λ, µ ∈ R .
L’insieme L (V) dei tensori e uno spazio vettoriale reale con le operazioni
(A + B)u = Au + Bu ∀A,B ∈ L (V)(λA)u = λAu ∀A ∈ L (V) ∀λ ∈ R
per ogni u ∈ V. Inoltre L (V) e munito anche del prodotto di composizione
A ◦Bu = A(Bu) ∀u ∈ V .
A titolo di esempio, citiamo il tensore della conducibilita, o conduttivita, termica di un ma-teriale conduttore che in ogni punto trasforma linearmente il gradiente della temperatura nelflusso di calore; o quello della conduttivita elettrica che trasforma nello stesso modo il campoelettrico nel vettore di induzione elettrica. Un altro esempio, di fondamentale importanzanella dinamica dei sistemi rigidi, e quello del tensore d’inerzia. Citiamo infine il tensore delladeformazione e il tensore degli sforzi, che descrivono in ogni punto di un corpo continuo gliallungamenti e le variazioni d’angolo tra gli elementi lineari e lo stato di tensione. Nel ca-so dell’elasticita lineare il secondo dipende linearmente dal primo secondo la legge di Hooke,espressa da un tensore C : L (V)→ L (V) che descrive in ogni punto le proprieta elastiche delmateriale.
Una forma bilineare su V e un’applicazione a : V × V → R lineare in ciascuno dei dueargomenti. Ad ogni tensore A corrisponde la forma bilineare
(5.1) a(u,v) = u ·Av ∀u,v ∈ V .

Calcolo vettoriale 25
Viceversa, ad ogni forma bilineare a su V corrisponde un unico tensore A che soddisfa la (5.1).Ma ad essa corrisponde anche il tensore trasposto di A, che indicheremo con AT , tale che
a(u,v) = ATu · v ∀u,v ∈ V .
Il tensore A e detto simmetrico se A = AT e emisimmetrico, o antisimmetrico, se A = −AT .In termini di forme bilineari abbiamo rispettivamente a(u,v) = a(v,u) e a(u,v) = −a(v,u).
Esercizio 5.1 Verificare che (A ◦B)T = BT ◦AT .
Ogni tensore A puo essere decomposto come somma di un tensore simmetrico e di un tensoreemisimmetrico
A =A + AT
2+
A−AT
2= AS + AW ,
dette rispettivamente parte simmetrica e parte emisimmetrica di A. La decomposizione eunica, infatti se A = S+W per qualche S simmetrico e W emisimmetrico allora AT = S−W,quindi per somma e differenza
S = AS e W = AW .
Dunque lo spazio dei tensori puo essere visto come somma diretta
L (V) = L S(V)⊕LW (V)
del sottospazio L S(V) dei tensori simmetrici con LW (V), quello dei tensori emisimmetrici.Data una forma bilineare a(u,v) su V×V, la sua restrizione ϕ(u) = a(u,u) al sottospazio
{(u,v) ∈ V | u = v} si chiama forma quadratica. Essa dipende soltanto dalla parte simmetricadel tensore A associato ad a perche la forma quadratica relativa ad un tensore emisimmetricoW e, per la simmetria del prodotto scalare, identicamente nulla
u ·Wu = −Wu · u = −u ·Wu ∀u ∈ V ⇒ Wu · u = 0 ∀u ∈ V ,
quindi a tutti i tensori con la stessa pate simmetrica corrisponde la stessa forma quadratica.Scelta in V una base ortonormale A = {ei}, ogni tensore puo essere identificato mediante
9 componenti nel seguente modo. Se ogni vettore u viene espresso nella forma u = ujej , lai-esima componente della sua immagine Au e
ei ·Au = ei ·Aejuj .
Ad A rimane quindi associata la matrice A di componenti
(5.2) Aij = [A]ij = ei ·Aej = a(ei, ej) , i, j = 1, 2, 3
che trasforma linearmente le componenti di u in quelle di Au. Interpretando la (5.2) comeprodotto righe per colonne, la matrice A si costruisce mettendo in colonna, nell’ordine, lecomponenti delle immagini dei versori della base. Le nozioni di tensore trasposto, simmetrico,emisimmetrico e le raltive proprieta si traducono in modo ovvioin analoghe nozioni e proprieta

26 Calcolo vettoriale
per le matrici rappresentative. La matrice associata al prodotto A ◦ B, che indicheremosemplicemente con AB, ha per componenti AikBkj e l’identita I, che lascia ogni vettore in sestesso, ha componenti δij rispetto a qualunque base.
Analogamente alle componenti di un vettore, anche quelle di un tensore soddisfano unaprecisa legge di variazione al variare della base. Siano Aij = ei · Aej e A′ij = fi · Afj lecomponenti di A sulle due basi ortonormali A = {ei} e B = {fi}. Esprimendo gli fi in funzionedegli ej e indicando con Q la matrice dei coseni direttori fi · ej , si ottiene la trasformazione
(5.3) A′ij = (fi · eheh) ·A(fj · ekek) = fi · ehfj · ekeh ·Aek = QihQjkAhk ,
che puo essere scritta anche nella forma A′ = QAQT .Considerazioni analoghe a quelle gia fatte per i vettori, sul significato della formula del
cambio di base, valgono anche per i tensori. La (5.3) garantisce l’indipendenza dalla basequalora il tensore venisse introdotto attraverso le sue componenti. Per meglio chiarire il sensofisico di questa affermazione, si pensi ad esempio ad un conduttore elettrico piano la cuimatrice delle conduttivita sia data da (
α 00 β
).
La forma diagonale della matrice indica, come vedremo, che i versori della base sono anche ledirezioni principali, lungo le quali le caratteristiche del conduttore sono esattamente α e β (piuin generale la conduttivita lungo una generica direzione n = n1e1 + n2e2 e pari a αn2
1 + βn22).
Ma in seguito allo scambio dei due assi, tanto per fare un esempio, se tale grandezza devedescrivere proprieta materiali intrinseche, la matrice associata assume la nuova forma(
β 00 α
).
Cosı come i vettori possono essere definiti come terne di numeri che soddisfano la (4.2), anchei tensori possono essere definiti come matrici che variano secondo la (5.3) al variare della base.Usando la notazione con indici, gli scalari si rappresentano con simboli senza indici (tensoridi ordine 0), i vettori con simboli ad un solo indice (tensori di ordine 1) e i tensori introdottiin questo paragrafo con simboli a due indici (tensori di ordine 2). Vi sono poi grandezzetensoriali a 3, 4, . . . ,m indici, come nel caso del tensore elastico C cui abbiamo gia accennato,il quale, trasformando il tensore della deformazione nel tensore degli sforzi secondo la leggelineare T = CE, o in componenti Tij = CijhkEhk, deve avere ordine 4. Tra l’altro nella formuladel cambio di base C ′ijhk = QirQjsQhlQkmCrslm la matrice dei coseni direttori compare 4 volte.
Esempi:
5.1 Sia α uno scalare. Il tensore A = αI si rappresenta con la matrice
αI =
α 0 00 α 00 0 α

Calcolo vettoriale 27
rispetto a qualunque base ortonormale. Infatti
Aij = ei · αIej = αei · ej = αδij .
Un tensore di questo tipo viene detto isotropo, o sferico, o anche idrostatico per estensione dalcaso del tensore degli sforzi che ha questa struttura, dove α e la pressione, per un liquido ariposo. Operando sui vettori con lo stesso effetto del prodotto per lo scalare α, e noto anchecome tensore scalare.
5.2 Se (u1, u2, u3) indica la terna delle componenti di un vettore allora la matrice
A =
u1 0 00 u2 00 0 u3
non puo definire un tensore, altrimenti, usando il cambio di base che inverte l’orientamento die1, per la legge di trasformazione caratteristica dei tensori la nuova matrice A′ coinciderebbecon A, mentre la coerenza con l’invarianza vettoriale imporrebbe
A′ =
−u1 0 00 u2 00 0 u3
.
In L (V) e definito il prodotto scalare
A ·B = AijBij ∀A,B ∈ L (V) .
Per verificarne il carattere scalare basta osservare che
A′ijB′ij = QihQjkAhkQirQjsBrs = δhrδksAhkBrs = AhkBhk .
Banalmente, i requisiti del prodotto scalare sono soddisfatti e naturalmente A e B posso-no essere detti ortogonali se A · B = 0. Cio accade per esempio se A e simmetrico e Bemisimmetrico, infatti
A ·B = AijBij = Aji(−Bji) = −AjiBji = −A ·B ,
da cui si deduce tra l’altro che L (V) ammette L S(V) e LW (V) come sottospazi ortogonali.Il prodotto scalare induce su L (V) la norma ‖A‖ =
√A ·A, ma esistono anche altre
norme ad essa equivalenti quali
‖A‖ = supu 6=0
Au · u|u|2 = max
|u|=1Au · u = max
|u|61Au · u , ‖A‖ = max |Aij |
e tutte soddisfano la disuguaglianza di Schwarz
|A ·B| 6 ‖A‖‖B‖

28 Calcolo vettoriale
e l’ulteriore disuguaglianza‖A ◦B‖ 6 ‖A‖‖B‖ .
Si definisce traccia del tensore A lo scalare
tr A = A · I = A11 +A22 +A33 = Aii = ei ·Aei .
Il determinante del tensore A, det A, e il determinante della matrice A che lo rappresenta suuna base assegnata A = {ei}, quindi coincide col prodotto misto Ae1 ×Ae2 ·Ae3 delle trecolonne di A. Apparentemente questa definizione risulta mal posta perche sembra dipenderedalla base e non solo dal tensore, ma per la formula di Binet vale la relazione det(QAQT ) =detA, quindi si tratta di uno scalare. Si potrebbe addirittura definire
det A =Au×Av ·Aw
u× v ·wcon u,v,w linearmente indipendenti. Infatti
Au×Av ·Awu× v ·w =
Auiei ×Avjej ·Awkeku× v ·w =
uivjwkAei ×Aej ·Aekεrshurvswh
=uivjwkεijkAe1 ×Ae2 ·Ae3
εrshurvswh= Ae1 ×Ae2 ·Ae3 .
Dalla definizione risulta chiaro che det A 6= 0 se e solo se A trasforma sistemi (di vettorilinearmente) indipendenti in sistemi indipendenti, proprieta chiave nello studio del seguenteproblema.
Problema 5.1 Assegnati A ∈ L (V) e f ∈ V, trovare u ∈ V tale che
Au = f .
Sviluppando il primo membro rispetto ad una base {ei} si ottiene
(5.4) uiAei = f ,
da cui segue che il Problema 5.1 ammette soluzioni se e solo se f appartiene al sottospaziogenerato dal sistema {Aei}. In particolare, se i vettori Aei sono indipendenti formano unabase e A e surgettivo perche, essendo gli Aei dei generatori, una terna {ui} che soddisfa la (5.4)esiste, ma e anche iniettivo perche tale terna e unica essendo gli Aei linearmente indipendenti.Di conseguenza det A 6= 0 se e solo se esiste il tensore inverso A−1, caratterizzato da
A−1 ◦A = A ◦A−1 = I
e al quale resta associata la matrice inversa A−1 di A per ogni scelta della base. La soluzionedel Problema 5.1 e allora data da u = A−1f .
Per concludere, anche l’espressione
A11A22 −A12A21 +A22A33 −A23A32 +A11A33 −A13A31
=12
(AiiAjj −AijAji) =12
((A · I)2 −A ·AT )

Calcolo vettoriale 29
e uno scalare. Le tre quantita introdotte in questo paragrafo
tr A ,12
((A · I)2 −A ·AT ) , e det A
sono i tre invarianti del tensore A, si chiamano primo, secondo e terzo invariate e si indicanocon le notazioni IA, IIA e IIIA.
Esercizi
1. Dimostrare che se A ∈ L (V) e invertibile, la matrice associata al tensore inverso,A−1, coincide con l’inversa di quella associata ad A, inoltre anche AT e invertibilee (AT )−1 = (A−1)T .
2. Verificare che se A e B sono invertibili anche A ◦B lo e e (A ◦B)−1 = B−1 ◦A−1.
3. Dimostrare cheIIA =
12εijhAei ×Aej · eh ∀A ∈ L (V) .
4. Dimostrare che ogni forma bilineare a : V× V→ R soddisfa
|a(u,v)| 6 ‖A‖|u||v| ∀u,v ∈ V
dove A ∈ L (V) e il tensore associato ad a.
5. Quali ipotesi sulla forma bilineare a : V × V → R assicurano che si tratti anche di unprodotto scalare su V?
6. Decomporre i tensori rappresentati, in una certa base, dalle matrici−1 3 03 −3 54 −9 2
e
0 6 6−1 −4 01 1 7
in parte simmetrica e parte emisimmetrica e verificare che le due parti sono tra loroortogonali.
7. Dimostrare che gli invarianti di un tensore emisimmetrico W sono
IW = IIIW = 0 e IIW =12‖W‖2 .
8. Dimostrare che la caratteristica di un tensore emisimmetrico W e pari a 2 e che |We|e costante al variare del versore e nell’ortogonale del nucleo. Dedurne che e×We nondipende da e cosı scelto e appartenente al nucleo.
9. Siano α uno scalare, ui le tre componenti di un vettore e Aij le nove componenti di untensore.

30 Calcolo vettoriale
(a) I numeri A11 e u1 sono scalari?(b) Le terne (α, α, α), (A11, A22, A33) e (A11, A12, A13) sono vettori?(c) Quali delle seguenti matriciα 0 0
0 α 00 0 α
,
u1 u2 u3
0 0 00 0 0
,
0 u3 u2
−u3 0 u1
−u2 −u1 0
,
0 −u3 u2
u3 0 −u1
−u2 u1 0
e uiuj
rappresentano dei tensori?
10. Mostrare che uh = εijhAij e un vettore se Aij e un tensore, mentre Aij = εijhuh e untensore emisimmetrico se uh e un vettore.
11. Trovare un cambio di base che trasforma la quarta matrice dell’Esercizio 9. nella0 0 00 0 −v10 v1 0
.
12. Dopo aver verificato che la matrice 1/2 1/√
2 −1/21/2√
3 1/√
6√
3/2√2/3 −1/
√3 0
rappresenta un cambio di base, calcolare sulla nuova base le componenti del tensore 5 −1 −
√3
−1 0 −√
3−√
3 −√
3 0
.
13. Verificare che la rappresentazione a −b 0b a 00 0 1
e invariante rispetto a cambi di base che lasciano fisso il terzo versore.
14. Stabilire, o negare con controesempi, se A ◦B e simmetrico o emisimmetrico essendoA e B simmetrici o emisimmetrici.
15. Dimostrare che, qualunque sia il tensore A, la forma quadratica associata ad AT ◦A enon negativa e che A = 0 se AT ◦A = 0, mentre A◦A puo essere nullo anche se A 6= 0.
16. Dimostrare che se A e simmetrico e A ◦ B e simmetrico per ogni B emisimmetricoallora A = 0.
17. Dimostrare che il nucleo e l’immagine di un tensore simmetrico sono sottospazi ortogo-nali.

Calcolo vettoriale 31
6 Diadi
Assegnati due vettori a e b, la diade, o prodotto tensoriale, a⊗ b e il tensore che associaad ogni vettore u il vettore
a⊗ bu = ab · u .Rispetto ad una base ortonormale A = {ei} le componenti di a⊗ b sono
[a⊗ b]ij = ei · a⊗ bej = ei · ab · ej = aibj ,
dove ai e bj sono le componenti di a e b rispetto alla base A . Si ottiene cosı la matricerappresentativa a1b1 a1b2 a1b3
a2b1 a2b2 a2b3a3b1 a3b2 a3b3
.
Trasformando tutto V nel sottospazio dei vettori paralleli ad a, la diade a ⊗ b e degenere dirango 1 e il suo nucleo e lo spazio ortogonale a b. I vettori che mantengono inalterata la lorodirezione sono quelli paralleli ad a. Viceversa, possiamo verificare che ogni tensore di rango 1 euna diade. Infatti se Au e parallelo al vettore a per ogni u ∈ V esiste una funzione F : V→ Rtale che
Au = F(u)a
Allora F e lineare e se f e il vettore legato alla F dalla relazione F(u) = f · u si ottiene
Au = f · ua = a⊗ fu ∀u ∈ V .
Scegliendo basi opportune possiamo fare in modo che al piu due componenti di una diadesiano non nulle. Se ad esempio e1 viene scelto parallelo ad a ed e2 combinazione lineare di ae di b si ha
[a⊗ b] =
a1b1 a1b2 00 0 00 0 0
dove a1 coincide col modulo di a o col suo opposto a seconda del verso di e1. Simili rappre-sentazioni si possono ottenere con scelte diverse della base. In particolare puo accadere che ae b siano paralleli oppure ortogonali e in questi casi le matrici associate possono semplificarsiulteriormente
[a⊗ b] =
a1b1 0 00 0 00 0 0
oppure [a⊗ b] =
0 a1b2 00 0 00 0 0
.
Se a e b coincidono con un versore e la diade che essi definiscono
u→ e⊗ eu = u · ee
e semplicemente l’operatore di proiezione lungo e, quindi somme di diadi elementari, comel’identita
I =3∑i=1
ei ⊗ ei ,

32 Calcolo vettoriale
possono essere usate per rappresentare un vettore in componenti rispetto ad una base
3∑i=1
ei ⊗ eiu =3∑i=1
u · eiei .
Il sistema di diadi {eh ⊗ ek | h.k = 1, 2, 3} e ortonormale in L (V) col prodotto scalareintrodotto nel §5 in quanto
ei ⊗ ej · eh ⊗ ekδihδjk .
Ogni elemento A ∈ L (V) ammette dunque la decomposizione diadica
A =3∑
hk=1
A · eh ⊗ ekeh ⊗ ek
dove i coefficienti A · eh ⊗ ek coincidono con le componenti Ahk = eh · Aek di A. Infineosserviamo che i sistemi{
eh ⊗ eh ,eh ⊗ ek + ek ⊗ eh√
2se h 6= k
}e
{eh ⊗ ek − ek ⊗ eh√
2
}sono basi ortonormali in L S(V) e in LW (V) rispettivamente.
Esercizi
1. Dimostrare che se ai e bi sono le componenti di certi vettori a e b i prodotti aibj sono lecomponenti di un tensore.
2. Dimostrare che Ia⊗b = a · b e IIa⊗b = IIIa⊗b = 0.
3. Dimostrare che se a 6= 0 e a⊗ b = 0 allora b = 0.
4. Dimostrare che a⊗ b e una diade simmetrica se e solo se a e b sono paralleli.
5. Se per A,B ∈ L (V) definiamo la diade A⊗B nel seguente modo
[A⊗B]ijhk = AijBhk
dimostrare che si tratta di un tensore del quarto ordine.
6. Dimostrare che il sistema di diadi
{ei ⊗ ej⊗eh ⊗ ek}
e una base nello spazio dei tensori del quarto ordine. In particolare si ha
Cijhk = ei ⊗ ej · Ceh ⊗ ek = C · ei ⊗ ej⊗eh ⊗ ek .
7. Trovare le componenti rispetto ad una base ortonormale del tensore di proiezione su unsottospazio bidimensionale.

Calcolo vettoriale 33
7 Autovalori e autovettori
Ci poniamo il problema di determinare le direzioni unite di un tensore. Precisamente, datoA ∈ L (V), vogliamo trovare tutti i vettori u 6= 0 per i quali esiste uno scalare λ tale che
(7.1) Au = λu .
Se λ e u soddisfano la (7.1) λ si chiama autovalore di A e u autovettore di A relativo a λ.Il problema posto, detto problema agli autovalori, puo essere formulato nello stesso modo insituazioni piu generali, basta aver a che fare con operatori lineari, quali possono essere adesempio gli operatori differenziali lineari relativi a fenomeni di vibrazione.
Gli autovettori di un certo autovalore, se esistono, formano, insieme al vettore nullo, unsottospazio vettoriale di V, il nucleo del tensore A− λI, chiamato autospazio relativo a λ e leloro direzioni, dette direzioni principali. Si tratta dunque di cercare le soluzioni u non banalidell’equazione vettoriale
(7.2) (A− λI)u = 0 ,
la cui esistenza dipende dall’esistenza di soluzioni λ dell’equazione
(7.3) det(A− λI) = 0 .
Poichedet(A− λI) = detQ(A− λI)QT = det(QAQT − λI) ,
gli autovalori sono invarianti e la (7.3) puo essere riscritta su una base qualsiasi usando lamatrice associata ad A. Si perviene cosı all’equazione caratteristica, detta anche equazionesecolare, per gli autovalori di A
(7.4) − λ3 + IAλ2 − IIAλ+ IIIA = 0 .
Per il Teorema fondamentale dell’Algebra l’equazione (7.4) ammette tre soluzioni eventual-mente complesse, ma dal momento che i suoi coefficienti sono reali, quelle non reali sono alpiu due e tra loro coniugate, quindi un autovalore reale esiste sempre e il problema (7.1) hasempre soluzione in V.
Le soluzioni λ1, λ2 e λ3 sono legate ai coefficienti del polinomio caratteristico che comparea I membro dalle relazioni
IA = λ1 + λ2 + λ3
IIA = λ1λ2 + λ2λ3 + λ1λ3
IIIA = λ1λ2λ3 .
Risolta la (7.4), per calcolare gli autovettori relativi all’i-esimo autovalore, λi, basta sostituirequesto nella (7.2) che, rispetto alla base scelta per rappresentare A, diventa il sistema lineare
(Ahk − λiδhk)uk = 0

34 Calcolo vettoriale
e le terne (ui1, ui2, ui3) che soddisfano questo sistema sono le componenti degli autovettoririchiesti.
Illustriamo adesso alcune proprieta degli autovalori e degli autovettori di un tensore sim-metrico. Indichiamo con λ1 un (o l’unico) autovalore reale e con n1 un autovettore unitarioassociato. Essendo n1 ·An1 = λ1 e n2 ·An1 = n3 ·An1 = 0, rispetto ad una qualunque basedi cui n1 e il primo versore, la matrice rappresentativa di A assume una forma del tipoλ1 0 0
0 A22 A23
0 A23 A33
e l’equazione caratteristica diventa
(λ− λ1)(λ2 − (A22 +A33)λ+A22A33 −A223) = 0
le cui soluzioni sono ovviamente tutte reali2. Dunque ogni tensore simmetrico ha gli autovaloritutti reali. Inoltre si verifica facilmente che a due autovalori distinti corrispondono autovettoriortogonali. Siano infatti u e v autovettori di λ e µ rispettivamente con λ 6= µ. Per la simmetriadi A
λu · v = Au · v = u ·Av = u · µv
che equivale a(λ− µ)u · v = 0 ,
da cui u · v = 0.Di conseguenza, se i tre autovalori reali di un tensore simmetrico sono distinti, ogni auto-
spazio ha dimensione 1 e basta un solo autovettore unitario a generarlo. Il sistema ortonormale{n1,n2,n3} dei tre versori cosı ottenuti puo essere a sua volta scelto come base rispetto allaquale A ha per componenti
(7.5) Aij = ni ·Anj = ni · λjnj = λ(j)δij
dove le parentesi intorno all’indice j stanno ad indicare che non va effettuata la somma anchese ripetuto. E evidente dalla (7.5) che sulla base degli autovettori la matrice rappresentativaassume la forma diagonale
A =
λ1 0 00 λ2 00 0 λ3
,
che, scritta come decomposizione diadica, assume la forma
A =3∑i=1
λini ⊗ ni ,
2Il risultato e vero in dimensione qualunque, puo essere facilmente dimostrato nell’ambito delle forme bi-lineari hermitiane (o autoaggiunte), ma in questo caso tridimensionale e reale la verifica diretta e naturale eimmediata.

Calcolo vettoriale 35
detta anche decomposizione spettrale di A dal termine spettro con cui si suole indicare l’insiemedegli autovalori di un operatore lineare.
Mostriamo adesso che anche quando un autovalore ha molteplicita maggiore di 1 e semprepossibile trovare una base ortonormale di autovettori, rispetto alla quale quindi A si rap-presenta con una matrice diagonale. In questi casi si ha maggiore liberta nella scelta dellaterna principale in quanto la molteplicita dell’autovalore coincide con la dimensione del corri-spondente autospazio3. In particolare, se essa e pari a 3 la rappresentazione risulta diagonalerispetto a qualunque base perche ogni direzione e principale.
Siano dunque λ1 = λ e λ2 = λ3 = µ 6= λ i tre autovalori di A e {n1,n2,n3} una ternaortonormale qualsiasi che ammetta n1 come autovettore unitario relativo a λ. Rispetto aquesta base si ha
A =
λ1 0 00 A22 A23
0 A23 A33
,
quindi valgono le relazioni {A22 + A33 = 2µA22A33 −A2
23 = µ2
dalle quali, eliminando µ, si ottiene
(A22 −A33)2 + 4A223 = 0 .
Allora A22 = A33 = µ e A23 = 0, quindi A e diagonale.Vediamo adesso qual e il ruolo degli autovalori e degli autovettori nell’ambito della teoria
delle forme quadratiche. Siano A un tensore simmetrico di autovalori λ1 6 λ2 6 λ3 e ϕ(u) =Au ·u la forma quadratica ad esso associata. La restrizione di ϕ alla sfera S dei vettori unitariammette λ1 e λ3 come valori estremi. Infatti, rispetto ad una terna ortonormale principale{nh}, se per ogni e ∈ S si pone αh = e · nh, si ottiene
Ae · e =3∑
hk=1
Aαhnh · αknk =3∑
hk=1
αhαkλhnh · nk =3∑
hk=1
λhαhαkδhk =3∑
h=1
λhα2h ,
dove l’ultimo termine soddisfa le disuguaglianze
(7.6) λ1 =3∑
h=1
λ1α2h 6
3∑h=1
λhα2h 6
3∑h=1
λ3α2h = λ3 .
Queste stime sono ottimali e vengono effettivamente raggiunte dalla ϕ proprio sugli autovettoricorrispondenti, basta osservare che
An1 · n1 = λ1n1 · n1 = λ1 e An3 · n3 = λ3n3 · n3 = λ3 .
3Senza l’ipotesi di simmetria la situazione si fa piu complicata. In presenza di autovalori distinti non si avrain generale l’ortogonalita degli autovettori, ma questi formeranno una base su cui la diagonalizzazione e ancoravalida. Ma nel caso di autovalori multipli puo accadere che l’autospazio abbia dimensione minore della mol-teplicita dell’autovalore corrispondente, quindi puo non esistere una base di autovettori e la diagonalizzazionenon e possibile.

36 Calcolo vettoriale
Inoltre anche per il secondo autovalore si ha ϕ(n2) = λ2, ed anche questo, come i valoriestremi, sono valori di stazionarieta per ϕ. Ricordando infatti che ∇ϕ(u) = 2Au per ogniu ∈ V, i punti stazionari di ϕ sulla sfera unitaria sono tutti e soli gli autovettori unitari e icorrispondenti valori stazionari sono gli autovalori.
Una forma quadratica viene detta definita positiva [negativa] se ϕ(u) > 0 [ϕ(u) < 0] perogni u 6= 0, semidefinita positiva [negativa] se ϕ(u) > 0 [ϕ(u) 6 0] per ogni u 6= 0 e ϕ(u) = 0per qualche u 6= 0 e infine non definita (in segno) se esistono u,v ∈ V tali che ϕ(u) < 0 < ϕ(v).Poiche ϕ e una funzione omogenea di II grado in quanto
ϕ(tu) = Atu · tu = t2Au · u = t2ϕ(u) ,
da cui, in particolare,ϕ(u) = |u|2Ae · e = |u|2ϕ(e) ,
se e = vers u dalla (7.6) si ricava
λ1|u|2 6 ϕ(u) 6 λ3|u|2 ∀u ∈ V
che ci permette di classificare le forme quadratiche in base ai segni dei suoi autovalori: ϕ edefinita positiva [negativa] se essi sono positivi [negativi], e semidefinita positiva [negativa] sel’autovalore minimo [massimo] e nullo ed e non definita se il minimo autovalore e negativo eil massimo positivo.Esercizi
1. Calcolare gli autovalori e gli autovettori del tensore A che rispetto ad una certa baseortonormale {ei} e rappresentato dalla matrice5 1 4
1 5 −44 −4 8
.
Costruire una base principale.
2. Verificare che il tensore A, che su una certa base ortonormale {ei} e rappresentato dallamatrice
19
8 −2 2−2 5 42 4 5
,
e la proiezione di V su un suo sottospazio.
3. Calcolare gli autovalori e gli autovettori dei seguenti tensori e determinare della basirispetto alle quali assumono una forma diagonale 3 −
√2 −1
−√
2 4√
2−1
√2 3
,
1 2 32 −3 −13 −1 2
,
0√
2√
6√2 −1
√3√
6√
3 1
.

Calcolo vettoriale 37
4. Calcolare gli autovalori e gli autovettori dei seguenti tensori e dire se esiste una baserispetto alla quale ambedue assumono una forma diagonale 2 0 −2
0 4 0−2 0 2
e
1 0 10 2 01 0 1
.
5. Calcolare gli autovalori (non tutti reali) e i corrispondenti autovettori del tensore a b 0−b a 00 0 c
.
6. Calcolare gli autovalori (non tutti reali) e i corrispondenti autovettori di un tensoreemisimmetrico.
7. Dimostrare che se gli autovalori di un tensore A simmetrico sono tutti uguali allora A emultiplo dell’identita.
8. Calcolare gli autovalori e gli autovettori di una diade.
9. Dimostrare che ‖A‖ = max |λi|, essendo {λi} l’insieme degli autovalori di A, e unanorma su L (V), coincidente con una norma gia vista, quale?
10. Verificare che il tensore dell’Esercizio 2. soddisfa A2 = A. Se A e simmetrico questaproprieta caratterizza tutte le proiezioni?
8 Tensori ortogonali
Per un tensore R ∈ L (V) le due proprieta seguenti sono equivalenti
〈·, ·〉 R conserva il prodotto scalare Ru ·Rv = u · v ∀u,v ∈ V ,| · | R conserva il modulo |Ru| = |u| ∀u ∈ V .
Ovviamente 〈·, ·〉⇒ | · |, basta porre u = v. Per ottenere l’implicazione contraria, si riscrive la| · | per u + v
R(u + v) ·R(u + v) = (u + v) · (u + v)
e poi si sviluppano i prodotti. La 〈·, ·〉 si puo riscrivere nella forma
RTR = I .
Dunque R soddisfa la 〈·, ·〉 se e solo se e invertibile e R−1 = RT . Un tensore di questo tipoviene detto ortogonale. Tutte le proprieta gia studiate per le matrici associate a cambiamentidi base valgono anche per le matrici rappresentative dei tensori ortogonali. Anzi, le matricisono le stesse, pero le une hanno per righe le componenti dei versori della nuova base rispetto

38 Calcolo vettoriale
alla vecchia, le altre hanno per colonne le componenti delle immagini dei versori della base.Se la terna {Re1,Re2,Re3} ha lo stesso orientamento della {e1, e2, e3} allora det R = 1(altrimenti vale −1) e valgono le uguaglianze
Rei ×Rej = εijhReh
e le loro inverseRek =
12εijkRei ×Rej .
Moltiplicando per ek si ottiene
Rek · ek =12εijkRei ×Rej · ek ,
quindi IR = IIR e l’equazione caratteristica assume la forma
λ3 − IRλ2 + IRλ− 1 = 0 .
Una soluzione e certamente λ = 1 a cui corrispondono autovettori che rimangono in se stessi.Le altre due, µ e µ, sono complesse coniugate e di modulo unitario in quanto
|µ|2 = µµ · 1 = det R = 1 ,
pertanto esiste un numero reale ϑ tale che µ = eiϑ. Gli unici casi in cui sono reali anche µ eµ, necessariamente coincidenti, si hanno per ϑ = 2kπ con µ = µ = 1 e per ϑ = (2k + 1)π conµ = µ = −1.
Per meglio illustrare il significato di ϑ, vediamo in che relazione sta questo parametro conle componenti di R. Si ha
(8.1) IR = 1 + µ+ µ = 1 + 2 cosϑ ,
da cuiϑ = arcos
12
(IR − 1)
se per ϑ scegliamo l’intervallo [π/2, π/2]. Rispetto ad una base ortonormale col terzo elementocome autovettore unitario relativo all’autovalore λ = 1, la matrice di R assume la formaR11 R12 0
R21 R22 00 0 1
e tenendo presente la (8.1) e le condizioni di ortonormalita delle righe, si ottiene il sistema
R11 +R22 = 2 cosϑR11R22 −R12R21 = 1R2
11 +R212 = 1
R221 +R2
22 = 1R11R21 +R12R22 = 0 .

Calcolo vettoriale 39
Dalla seconda segue
R212R
221 = (R11R22 − 1)2 = R2
11R222 − 2R11R22 + 1 ,
d’altra parte, usando la terza e la quarta si ottiene
R212R
221 = (1−R2
11)(1−R222) = 1−R2
11 −R222 +R2
11R222 .
Dal confronto delle due e dalla prima si ricava
R11 = R22 = cosϑ
e quindi, per la terza e la quarta, si ha
R212 = R2
21 = sen2 ϑ
con R12 e R21 discordi a causa della quinta.Le possibili rappresentazioni di R sono dunquecosϑ − senϑ 0
senϑ cosϑ 00 0 1
oppure
cosϑ senϑ 0− senϑ cosϑ 0
0 0 1
.
Si riconosce subito R come una rotazione dell’angolo ϑ nel piano ortogonale all’autovettorerelativo all’autovalore 1 e va scelta la prima se il verso positivo di ϑ e quello antiorario rispettoad un osservatore orientato, dai piedi alla testa, come e3, l’altra nel caso orario.
Se det R = −1, ripetendo con le ovvie varianti il ragionamento fatto, si ricava facilmenteche un autovalore e −1 con l’effetto di invertire l’orientamento del relativo autospazio, cosı Rviene ad essere una rotazione, come quella vista adesso, composta con una riflessione.
Nel §1 abbiamo introdotto le traslazioni, o i vettori, come particolari isometrie su E ,adesso siamo in grado di caratterizzarle tutte. Ricordiamo che un’isometria e un’applicazioneΦ : E → E tale che
(8.2) |Φ(P )− Φ(Q)| = |P −Q| ∀P,Q ∈ E .
Conviene fissare un’origine O in E per identificare ogni punto P col vettore OP e ridefinire laΦ come applicazione F : V→ V ponendo
F(P −O) = Φ(P )− Φ(O) ∀P ∈ E .
In questo modo, posto u = P −O e v = Q−O, la (8.2), scritta in termini di F, diventa
(8.3) |F(u)− F(v)| = |u− v| ∀u,v ∈ V .
Dal momento che Φ e iniettiva, F si annulla solo in corrispondenza del vettore nullo, inoltreconserva il modulo, come si vede dalla (8.3) per v = 0, quindi conserva anche il prodottoscalare. Infatti dalla (8.3) segue
|F(u)− F(v)|2 = |u− v|2 = |u|2 + |v|2 − 2u · v ,

40 Calcolo vettoriale
d’altra parte|F(u)− F(v)|2 = |F(u)|2 + |F(v)|2 − 2F(u) · F(v)
e per confrontoF(u) · F(v) = u · v ∀u,v ∈ V .
Da quest’ultima segue ovviamente anche il viceversa, se F conserva il prodotto scalare conservaanche il modulo. Se adesso dimostriamo che F e lineare queste considerazioni ci riconduconoalla definizione di tensore ortogonale, ottenendo cosı la caratterizzazione
Φ(P )− Φ(O) = F(u) = Ru = R(P −O) ∀P ∈ E
che ci permette di interpretare ogni isometria come composizione di una traslazione con unarotazione (eventualmente seguita da una riflessione).
O
P
!(O)
!(P )
R(P !O)
Figura 9: Φ(P ) = Φ(O) + R(P −O).
Ora, F e lineare perche
|F(λu + µv)− λF(u)− µF(v)|2
= |F(λu + µv)|2 + λ2|F(u)|2 + µ2|F(v)|2 + 2λF(u) · µF(v)− 2F(λu + µv) · λF(u)− 2F(λu + µv) · µF(v)
= |λu + µv|2 + λ2|u|2 + µ2|v|2 + 2λµu · v− 2λ(λu + µv) · u− 2µ(λu + µv) · v = 0
.
Esercizi
1. Dimostrare che l’insieme dei tensori ortogonali e un gruppo del quale il sottoinsieme diquelli che ammettono uno stesso asse di rotazione e un sottogruppo commutativo.
2. Si consideri il tensore dell’Esercizio 5. del §7. Calcolare i valori di a, b e c che lo rendonoortogonale.

Calcolo vettoriale 41
3. Quali sono i tensori ortogonali e simmetrici?
4. Trovare l’asse e l’angolo di rotazione per il tensore ortogonale rappresentato dalla matrice0 0 11 0 00 1 0
rispetto alla base {ei}.
Osservazioni
Applicazioni C-lineari e R-lineari - E noto che le applicazioni C-lineari da C in C sonoquelle del tipo ϕ(z) = cz con un coefficiente c ∈ C. Posto c = a + ib e z = x + iy, cona, b, x, y ∈ R, e separando la parte reale dalla parte immaginaria, la ϕ puo essere vista comeapplicazione R-lineare da R2 → R2
(8.4) (x, y)→ (ax− by, bx+ ay) =(a −bb a
)(xy
),
si capisce quindi che non tutte le applicazioni R-lineari sono C-lineari, ma solo quelle di questaforma. Scritta in forma polare
z = ρeiϑ → |c|eiαρeiϑ = |c|ρei(ϑ+α) ,
l’interpretazione geometrica e immediata: la ϕ ruota dell’angolo α e dilata del fattore |c| ilpiano complesso. Lo stesso avviene in forma tensoriale su R2 tenendo presente che
|c| =√a2 + b2 , cosα =
a√a2 + b2
, senα =b√
a2 + b2,
per cui la (8.4) diventa √a2 + b2
(cosα − senαsenα cosα
)dove operano il tensore ortogonale e l’omotetia con la stessa rotazione e lo stesso fattore didilatazione di prima.
9 Vettori e tensori emisimmetrici
Assegnato un vettore ω, l’applicazione
u→ ω × u ∀u ∈ V
e, come sappiamo, lineare, dunque esiste un tensore W tale che
(9.1) Wu = ω × u ∀u ∈ V .

42 Calcolo vettoriale
Moltiplicando la (9.1) scalarmente per un arbitrario vettore v, si ottiene
(9.2) Wu · v = ω × u · v = −u · ω × v = −u ·Wv ∀u,v ∈ V ,
quindi W e emisimmetrico. Note le componenti di ω rispetto ad una base ortonormale ei,quelle di W sono date da
(9.3) Wij = ei ·Wej = ei · ω × ej = ej × ei · ω = εjikek · ω = εjikωk
e formano la matrice
W =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
.
Scegliendo opportunamente la base e possibile aumentare il numero di componenti nulle. Sead esempio il terzo versore e orientato come ω, in modo che ω = ωe3, la matrice diventa
W =
0 −ω 0ω 0 00 0 0
.
Per invertire la (9.3) e ricavare le componenti di ω in funzione di quelle di W, basta moltipli-carla membro a membro per εijh
εijhWij = εijhεjikωk = −εijhεijkωk = −2δhkωk = −2ωh ,
da cui
(9.4) ωh =12εjihWij .
Ad esempio per h = 1 si ottiene
ω1 =12
(ε231W32 + ε321W23) =12
(W32 −W23) = W32 ,
analogamente per le altre componenti. La (9.4) mostra che ad ogni tensore W emisimmetrico eassociato un vettore che opera su tutti i vettori di V mediante il prodotto vettoriale. Vogliamotuttavia verificare quest’affermazione in termini assoluti, senza cioe usare le componenti, comedel rasto abbiamo fatto nella (9.2) per il viceversa.
Sia dunque W emisimmetrico e dimostriamo che esiste un unico ω ∈ V che soddisfa la(9.1). Essendo Wu ·u = 0, si ha Wu ⊥ u quindi (v. la (2.7)) per ogni u ∈ V esiste un vettoreω(u) tale che
Wu = ω(u)× u .
Dobbiamo dimostrare che ω(u) e costante. Sia allora v un altro vettore e osserviamo che
Wu · v = ω(u)× u · v = ω(u) · u× v

Calcolo vettoriale 43
mentre per la emisimmetria di W si ha
Wu · v = −u ·Wv = −u · ω(v)× v = ω(v) · u× v
e dal confronto delle due si ottiene
(ω(u)− ω(v)) · u× v = 0 .
Allora ω(u)−ω(v) dipende linearmente da u e v, quindi esistono degli scalari α(u,v) e β(u,v)tali che
ω(u)− ω(v) = α(u,v)u + β(u,v)v ,
in particolare per v = 0ω(u) = ω(0) + α(u,0)u .
Posto ω = ω(0), per ogni u ∈ V si ottiene
Wu = (ω + α(u,0)u)× u = ω × u .
Per l’unicita, se Wu = ω × u e Wu = ω′ × u per ogni u ∈ V allora (ω − ω′) × u = 0 e perl’arbitrarieta di u deve essere ω = ω′.
Esercizi
1. Verificare che il vettore associato alla parte emisimmetrica della diade a⊗ b e b× a/2.
2. Scrivere le componenti del vettore associato al tensore emisimmetrico 0 2 −1−2 0 01 0 0
.
3. Determinare cambiamenti di base per i quali i tensori degli esercizi precedenti abbianoogni volta una sola componente non nulla.
4. Calcolare le componenti del tensore emisimmetrico associato al vettore ω = −e1 + 3e2.
5. Dato il vettore a, determinare il tensore A associato all’applicazione lineare u → a ×(u×a), verificare che e simmetrico e calcolarne la matrice associata rispetto ad una baseortonormale assegnata. Studiare anche il caso u→ a× (u× b).
6. Dato il vettore a, determinare il tensore A associato alla forma quadratica u→ |u× a|2e calcolarne la matrice associata rispetto ad una base ortonormale assegnata. Studiareanche il caso della forma bilineare a(u,v) = u× a · v × b.







![MODELLI E METODI MATEMATICI DELLA FISICA...A e della sua aumentata [A,b]. Calcolo di autovalori e autovettori di una matrice A. 1.2 Spazi vettoriali · Definizione di spazio vettoriale](https://img.dokumen.tips/doc/110x75/5fe3d5938c58a470cf163b2e/modelli-e-metodi-matematici-della-fisica-a-e-della-sua-aumentata-ab-calcolo.jpg)





















