Embed Size (px)
Citation preview
Firmansyah, Dicky. 2014
IDENTIFIKASI SISTEM PANAS BUMI MENGGUNAKAN METODE MAGNETOTELLURIK DI
SEKITAR DAERAH TEGAL
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB III
METODE PENELITIAN
3.1 Metode Penelitian
Penelitian ini dilakukan untuk mengidentifikasi potensi panas bumi di
sekitar daerah Tegal dengan menggunakan metode deskriptif analitik. Data
sekunder yang penulis dapatkan dari Puslit Geoteknologi LIPI Bandung.
3.2 Waktu dan Tempat Pengolahan Data
Pengolahan data dilaksanakan pada bulan Mei – Juli di Laboratory For
Earth Hazards Pusat Penelitian Geoteknologi Gedung 70 LIPI Bandung.
3.3 Tempat Penelitian
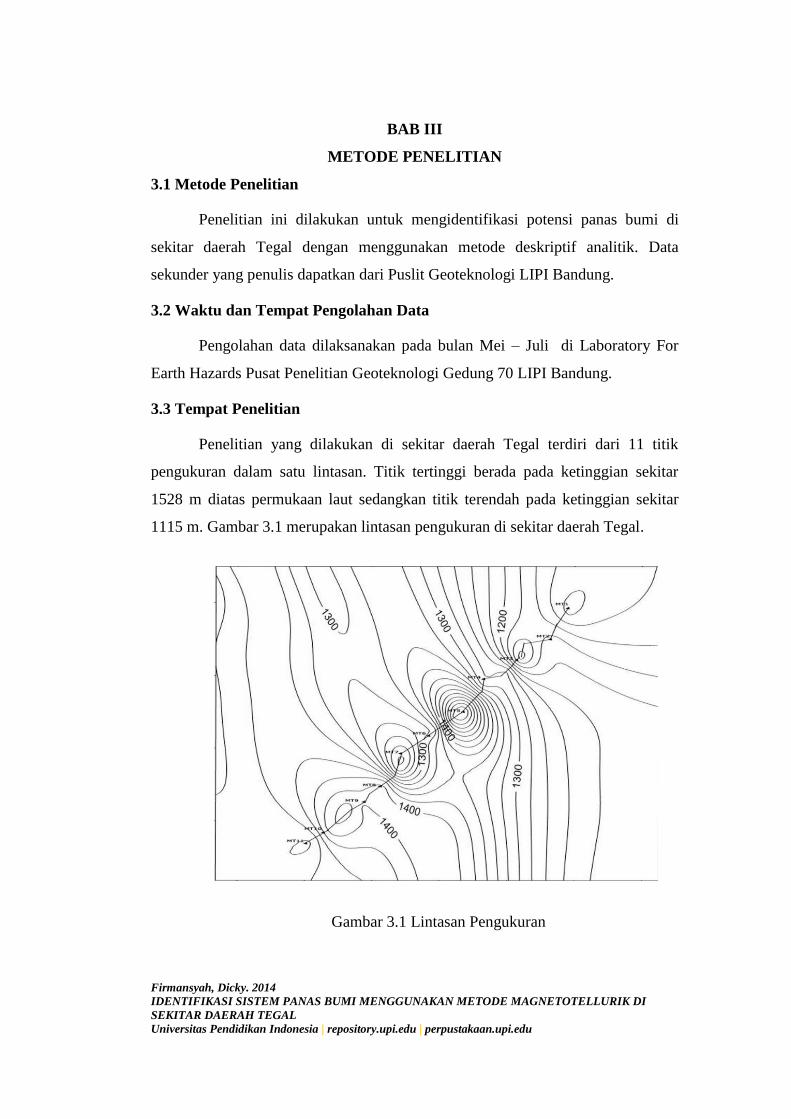
Penelitian yang dilakukan di sekitar daerah Tegal terdiri dari 11 titik
pengukuran dalam satu lintasan. Titik tertinggi berada pada ketinggian sekitar
1528 m diatas permukaan laut sedangkan titik terendah pada ketinggian sekitar
1115 m. Gambar 3.1 merupakan lintasan pengukuran di sekitar daerah Tegal.
Gambar 3.1 Lintasan Pengukuran
21
3.4 Peralatan Lapangan
Perlengkapan yang digunakan saat melakukan survei magnetotellurik yaitu :
1. Alat Magnetotellurik type MTU 5A
2. Tiga koil magnetik (induction coil) komponen Hx, Hy dan Hz
3. Lima buah electrode porous pot
4. Kabel penghubung
5. Air Garam
6. Accu
7. Conventer DC – AC
8. GPS Portable
9. Kompas Geologi
10. Multimeter
11. Kamera
12. Kompas Geologi
13. Alat Tulis
14. Laptop
15. Alat – alat yang mendukung yaitu tenda, cangkul, bor tanah, cutter, meteran.
Gambar 3.2 menunjukkan peralatan akuisisi data terdiri dari MTU, elektroda, koil
magnetik, kabel penghubung dan antena GPS.

22
Gambar 3.2 Peralatan Akuisisi Data Magnetotellurik
(Phoenix Geophysics)
Magnetotelluric unit (MTU) digunakan untuk merekam variasi medan
listrik dan medan magnet terhadap waktu. Induction coil merupakan sensor
medan magnetik (Hx, Hy dan Hz). Dua buah koil diletakkan secara horizontal
saling tegak lurus dan satu buah dipasang secara vertikal. Sensor medan listrik
(Ex dan Ey) digunakan electrode non polarizable agar tidak menimbulkan
gangguan medan listrik yang dimiliki oleh electrode itu sendiri. Electrode ini
menggunakan empat buah porous pot yang ditanam saling tegak lurus sebagai dua
buah sensor (Ex dan Ey) seperti yang ditunjukkan gambar 3.3. Satu buah porous
pot yang tersisa ditanam sebagai ground. Kabel konektor yang digunakan untuk
menghubungkan induction coil dan porous pot ke MTU. Laptop digunakan untuk
mengoperasikan MTU dan mengecek data mentah (raw data) hasil rekaman.
Sinyal GPS digunakan untuk menyinkronkan waktu dan mengetahui posisi titik
pengukuran MT. Accu digunakan sebagai sumber energi listrik untuk
mengaktifkan MTU. DC – AC converter digunakan untuk mengubah tegangan
DC menjadi AC pada accu untuk mengaktifkan laptop.
Bagian dasar lubang untuk tempat porous pot harus dilengkapi larutan
bentonit yang terbuat dari bentonit, garam dan air agar electrode yang berada di
sekitar lokasi bersifat elekrolit sehingga dapat merekam arus telurik dengan

23
optimal. Waterpass digunakan untuk mengatur coil agar berada tepat horizontal
ketika ditanam. Kompas digunakan sebagai penunjuk arah mata angin. Multimeter
digunakan untuk mengukur tahanan dari kabel elektroda, mengukur arus dan
tegangan listrik dari accu.
Tenda digunakan untuk melindungi alat MTU dari air hujan dan
diletakkan di posisi tengah. Meteran digunakan untuk mengukur jarak lokasi
antara koil dan elektroda. Cangkul dan bor tanah digunakan untuk menggali tanah
sampai menemukan kedalaman yang tepat untuk meletakkan koil dan elektroda.
Cutter digunakan untuk mengupas dan memotong kabel. Kabel sebaiknya
diamplas terlebih dahulu agar bersih dari kotoran yang menempel dan dapat
kontak dengan optimal.
Gambar 3.3 Layout Pengukuran Magnetotellurik
3.5 Pengolahan Data
Data yang terukur dalam survei MT ini yaitu variasi nilai medan listrik dan
medan magnet terhadap waktu atau berupa time series. Gambar 4.2 menampilkan
data pada titik MT5 komponen Ex, Ey, Hx, Hy dan Hz yang berisi informasi
amplitudo terhadap waktu. Data yang baik yaitu amplitudo gelombangnya
cenderung kecil dan terlihat seperti garis lurus horizontal. Beberapa komponen
menunjukkan data yang cukup baik hanya saja pada nilai Hz terlihat
24
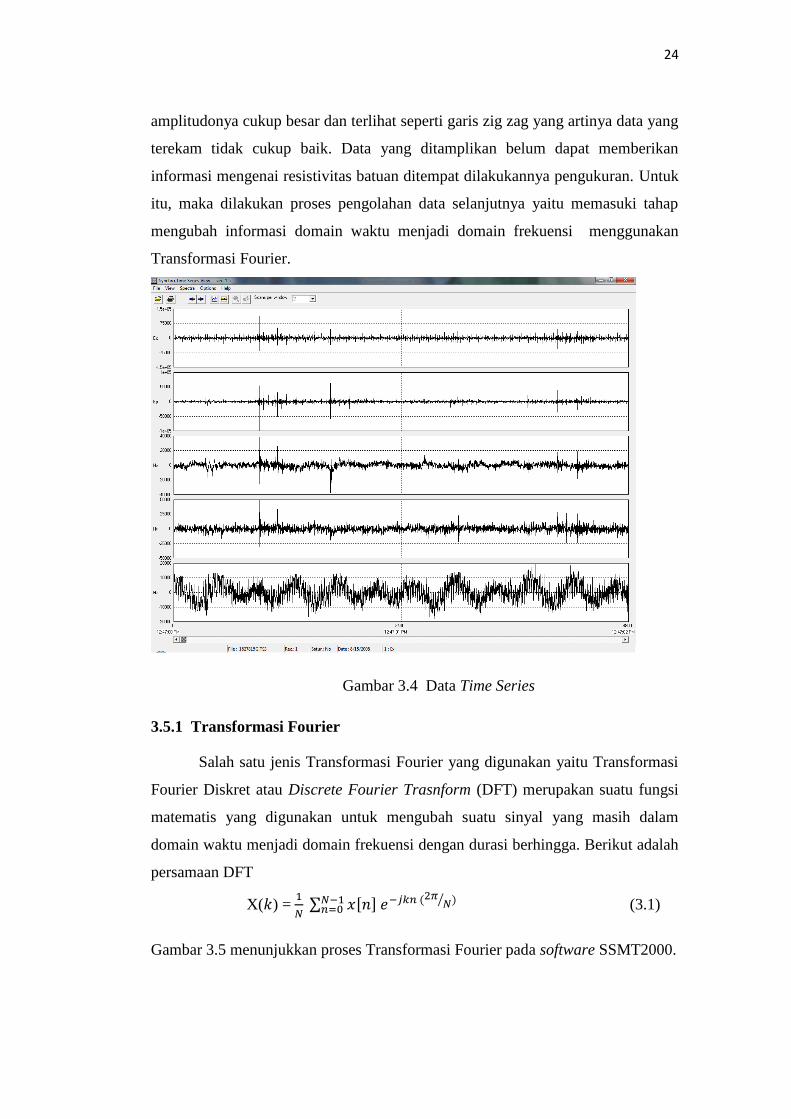
amplitudonya cukup besar dan terlihat seperti garis zig zag yang artinya data yang
terekam tidak cukup baik. Data yang ditamplikan belum dapat memberikan
informasi mengenai resistivitas batuan ditempat dilakukannya pengukuran. Untuk
itu, maka dilakukan proses pengolahan data selanjutnya yaitu memasuki tahap
mengubah informasi domain waktu menjadi domain frekuensi menggunakan
Transformasi Fourier.
Gambar 3.4 Data Time Series
3.5.1 Transformasi Fourier
Salah satu jenis Transformasi Fourier yang digunakan yaitu Transformasi
Fourier Diskret atau Discrete Fourier Trasnform (DFT) merupakan suatu fungsi
matematis yang digunakan untuk mengubah suatu sinyal yang masih dalam
domain waktu menjadi domain frekuensi dengan durasi berhingga. Berikut adalah
persamaan DFT
X( ) =
∑ [ ] ⁄
(3.1)
Gambar 3.5 menunjukkan proses Transformasi Fourier pada software SSMT2000.

25
Gambar 3.5 Transformasi Fourier
3.5.2 Robust Processing
Melakukan Robust Processing untuk menambahkan parameter –
parameter yang sesuai. Kedua proses ini menggunakan software SSMT2000.
Informasi yang dihasilkan dari robust processing adalah berupa file MTH dan
MTL yang didalamnya berisi informasi mengenai impedansi yang berisi informasi
mengenai resistivitas semu dan fase. Informasi ini dapat ditampilkan
menggunakan software MT Editor.
Menurut Simpson dan Bahr (2005) mengatakan bahwa robust processing
adalah teknik pemrosesan statistical untuk mengidentifikasi dan menghapus data
yang menyimpang oleh noise. Robust processing digunakan untuk merendahkan
nilai outliers pada proses iterasi. Outliers adalah data dengan nilai yang
menyimpang jauh dari nilai rata-rata, umumnya data tersebut dapat dianggap
sebagai noise sehingga robust processing dapat berperan sebagai filter noise awal
bagi data MT. Gambar 3.6 menunjukkan robust processing saat sedang berjalan
menggunakan software SSMT2000.

26
Gambar 3.6 Robust Processing
3.5.3 Seleksi Cross Power
Setiap titik yang berada pada kurva resistivitas maupun fasa dapat
diwakilkan oleh titik-titik lainnya yang biasa disebut dengan cross power. Cross
power ini dapat ditentukan pada saat robust processing dengan mengatur
parameter tertentu tetapi secara umum biasanya setiap titik diwakilkan oleh dua
puluh titik. Nilai cross power dapat disesuaikan agar bentuk kurva resistivitas dan
kurva fasa dapat menjadi lebih halus. Pada saat proses inversi, apabila bentuk
kurva baik model yang dihasilkan akan mempunyai nilai eror yang kecil dan dapat
menggambarkan struktur bawah permukaan yang mendekati keadaan
sesungguhnya.
Pada gambar 3.7 terdapat dua kurva resistivitas terhadap frekuensi dan
dua kurva fase terhadap frekuensi pada titik MT5. Kondisi idealnya adalah kurva
TE dan kurva TM berhimpitan tetapi kenyataannya terjadi efek pergeseran ke atas
maupun ke bawah dengan jarak tertentu dari yang seharusnya. Nilai restivitas
akan berubah karena pergeseran ini, dan menyebabkan hasil interprestasi menjadi
tidak tepat. Melakukan koreksi sangatlah diperlukan agar kurva menjadi benar
dan hasil interpretasinya pun benar. Pada hasil yang didapat, kurva tersebut
terlihat tidak rapi dan tidak halus diakibatkan oleh beberapa kondisi saat proses
pengukuran berlangsung yaitu heterogenitas permukaan. Ketidakhomogenan akan
mengganggu penjalaran arus dan menumpuk di daerah batas hetergoneitas
tersebut. Akibatnya adalah kurva hasil pengukuran MT akan bergeser ke atas jika

27
melewati daerah yang resistif dan akan bergeser ke bawah jika melewati daerah
yang konduktif. Proses seleksi cross power dilakukan untuk menaikkan atau
menurunkan titik pada kurva. Cross power merupakan kumpulan data parsial
yang jumlahnya dapat ditentukan pada saat melakukan robust processing. Jumlah
robust processing paling sedikit adalah satu dan paling banyak berjumlah seratus.
Pada penelitian ini dipilih jumlah cross power yang maksimal yaitu seratus agar
dapat meminimalkan noise yang terukur dan agar lebih tepat dalam memodelkan
citra bawah permukaan. Apabila memilih cross power yang maksimal maka kurva
hasil smoothing nya akan lebih baik bila dibandingkan dengan memilih yang
minimal. Terdapat keadaan dimana suatu titik pada kurva resistivitas yang
memang nilainya sudah tepat tidak dapat dinaikkan atau diturunkan melalui
seleksi cross power ataupun jika dapat tidak signifikan. Jumlah cross power
dalam hal ini tidak terlalu berpengaruh dan keadaan kurva yang didapat sudah
baik.
Gambar 3.7 Kurva Resistivitas Terhadap Frekuensi dan Fase Terhadap
Frekuensi Sebelum Dilakukan Proses Filtering pada MT Editor
Gambar 3.8 menunjukkan kurva setelah dilakukan proses filtering yang
hasilnya kurva menjadi jauh lebih baik dan halus .Kurva yang sudah baik ini di
simpan ke dalam bentuk format .edi atau EDI file. File ini kemudian dapat dibuka
menggunakan software WinGlink. Terdapat beberapa menu yang dapat digunakan
yaitu Maps, Soundings, Pseudo Section, X Section, 2D Inversion , 3D Modeling
dan Interpreted Views. Menu Maps digunakan untuk menampilkan lintasan
pengukuran saat proses akuisisi data yang berisi informasi ketinggian titik
28
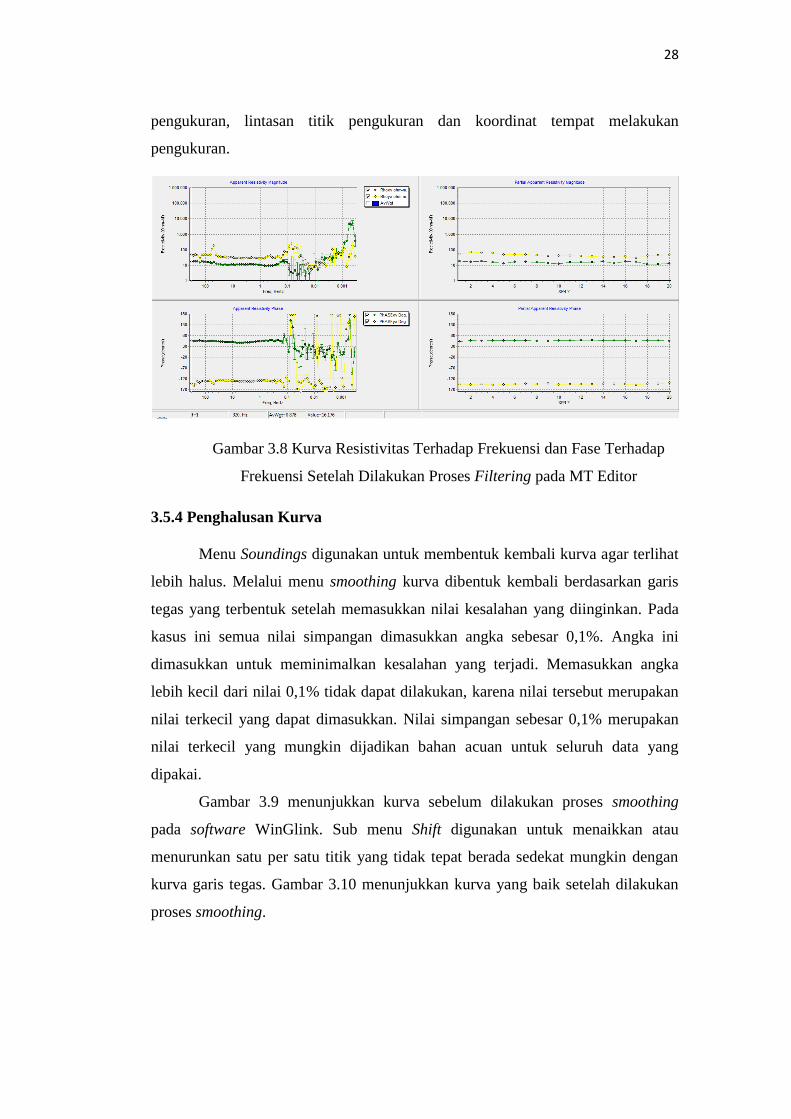
pengukuran, lintasan titik pengukuran dan koordinat tempat melakukan
pengukuran.
Gambar 3.8 Kurva Resistivitas Terhadap Frekuensi dan Fase Terhadap
Frekuensi Setelah Dilakukan Proses Filtering pada MT Editor
3.5.4 Penghalusan Kurva
Menu Soundings digunakan untuk membentuk kembali kurva agar terlihat
lebih halus. Melalui menu smoothing kurva dibentuk kembali berdasarkan garis
tegas yang terbentuk setelah memasukkan nilai kesalahan yang diinginkan. Pada
kasus ini semua nilai simpangan dimasukkan angka sebesar 0,1%. Angka ini
dimasukkan untuk meminimalkan kesalahan yang terjadi. Memasukkan angka
lebih kecil dari nilai 0,1% tidak dapat dilakukan, karena nilai tersebut merupakan
nilai terkecil yang dapat dimasukkan. Nilai simpangan sebesar 0,1% merupakan
nilai terkecil yang mungkin dijadikan bahan acuan untuk seluruh data yang
dipakai.
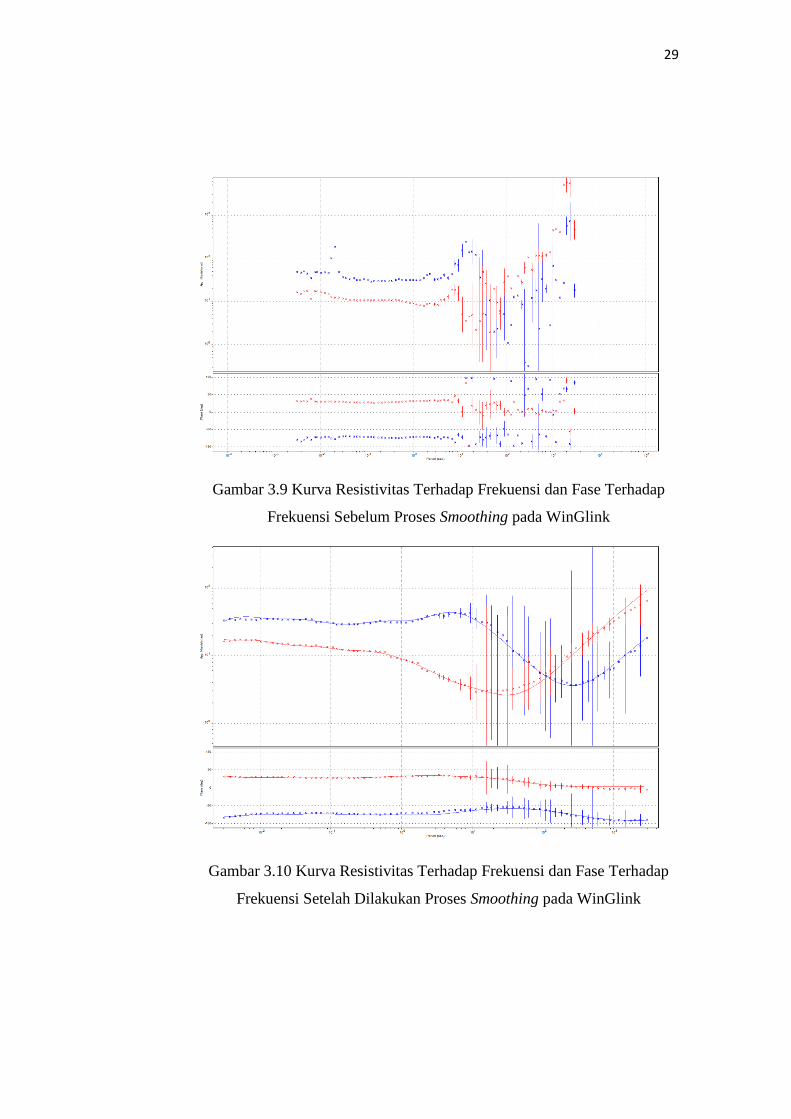
Gambar 3.9 menunjukkan kurva sebelum dilakukan proses smoothing
pada software WinGlink. Sub menu Shift digunakan untuk menaikkan atau
menurunkan satu per satu titik yang tidak tepat berada sedekat mungkin dengan
kurva garis tegas. Gambar 3.10 menunjukkan kurva yang baik setelah dilakukan
proses smoothing.
29
Gambar 3.9 Kurva Resistivitas Terhadap Frekuensi dan Fase Terhadap
Frekuensi Sebelum Proses Smoothing pada WinGlink
Gambar 3.10 Kurva Resistivitas Terhadap Frekuensi dan Fase Terhadap
Frekuensi Setelah Dilakukan Proses Smoothing pada WinGlink
30
3.5.5 Pemodelan Inversi
Hasil pengukuran dari setiap survei Geofisika disajikan dalam bentuk
angka – angka pengukuran. Hasil pengukuran tersebut bergantung pada kondisi
dan sifat fisis material di bawah permukaan. Tabel angka – angka pengukuran
selanjutnya disebut data observasi atau biasa disebut data lapangan. Penghubung
dari sifat fisis dan data observasi hampir selalu berupa persamaan matematika atau
model matematika. Berdasarkan model matematika parameter fisis batuan dapat
diesktrak dari data observasi. Proses ini disebut proses inversi atau inverse
modeling.
Pemodelan inversi pada dasarnya merupakan kebalikan dari pemodelan
kedepan (forward modeling). Proses inversi bertujuan untuk memperoleh suatu
model bawah permukaan dari data yang sudah ada atau dari hasil pengukuran
sedangkan Forward modeling merupakan suatu metode untuk mendapatkan suatu
data dari model yang sudah diketahui. Perbedaan kedua metode pemodelan
tersebut ditunjukkan pada gambar 3.11.
Inversi merupakan suatu proses untuk memperkirakan atau mencari model
yang menghasilkan data teoritik yang paling cocok dengan data pengamatan. Data
teoritik adalah respon model yang diperoleh dari proses pemodelan ke depan
(Forward Modeling). Apabila m sebagai model, dan F sebagai fungsi keadaan,
serta d adalah data yang diperoleh sesuai dengan model yang dibuat, maka dapat
ditulis
d= F(m) (3.1a)
Persamaan 3.1a digunakan untuk mencari data jika model telah diketahui,
atau bisa disebut forward modeling. Apabila ingin mendapatkan suatu model m
dari data yang dimiliki d maka diperlukan proses inversi
m=d (3.1b)

31
Gambar 3.11 Perbedaan Forward Modeling dan Inverse Modeling
(Grandis, 2011)
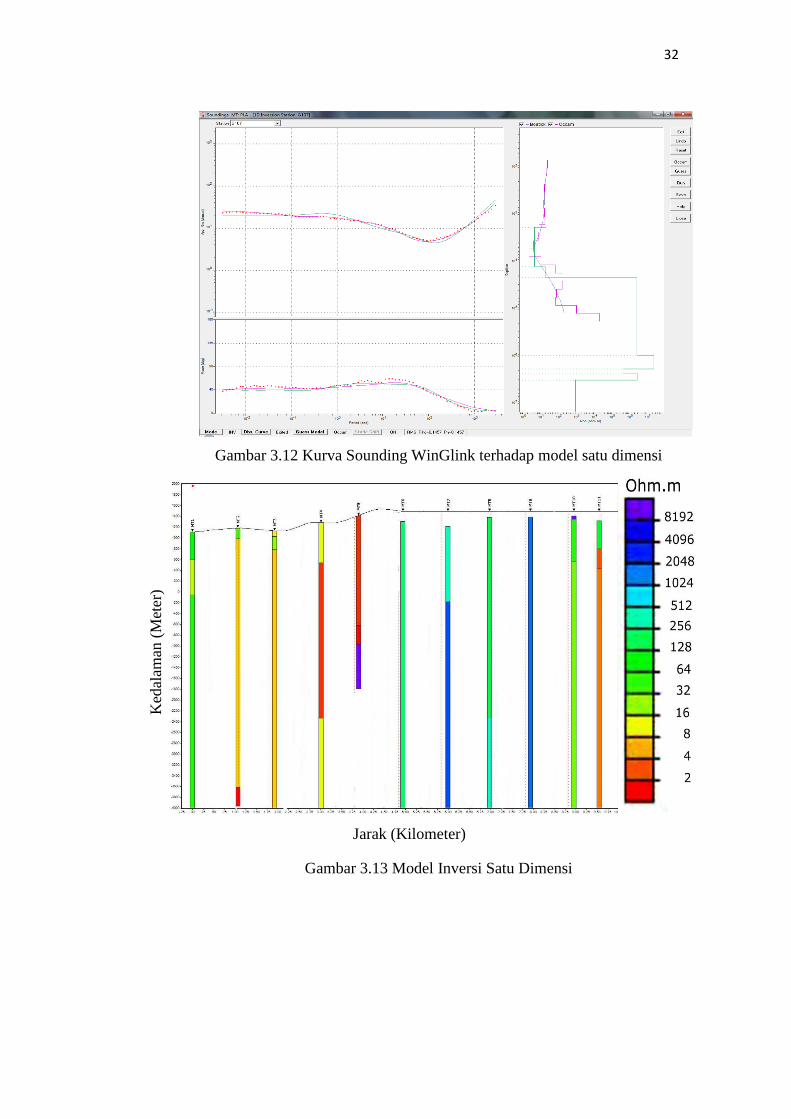
Menu X Section digunakan untuk melihat penampang semu berdasarkan
data sounding yang telah dilakukan proses smoothing. Pada menu ini dapat
dihasilkan penampang satu dimensi. Pada gambar 3.12 menunjukkan kurva
sounding yang telah dilakukan proses smoothing pada bagian kiri gambar
terhadap model satu dimensi Occam, Bostick dan model berdasarkan data yang
didapatkan pada bagian kanan gambar. Model Occam dan Bostick merupakan
model satu dimensi yang menggunakan metode Least Square Method untuk
medapatkan solusi yang paling sederhana. Kurva menunjukkan kedalaman
terhadap nilai resistivitas. Terlihat kurva ketiga model tersebut saling memotong
satu sama lain. Ini menandakan bahwa model yang akan dihasilkan tidak berbeda
jauh dengan model yang dijadikan acuan dengan nilai eror sebesar 0,1457.
Nilai simpangan yang kecil merupakan model yang akan dihasilkan dan
mendekati model yang sesungguhnya terhadap model acuan. Kurva MT 5
menunjukkan hingga kedalaman 4000 m dihasilkan tiga lapisan yang berbeda
dengan nilai resistivitas yang berbeda pula. Hal ini sesuai dengan gambar 3.13
mengenai inversi model satu dimensi.
32
Gambar 3.12 Kurva Sounding WinGlink terhadap model satu dimensi
Gambar 3.13 Model Inversi Satu Dimensi
Jarak (Kilometer)
Ked
alam
an (
Met
er)
MT5
33
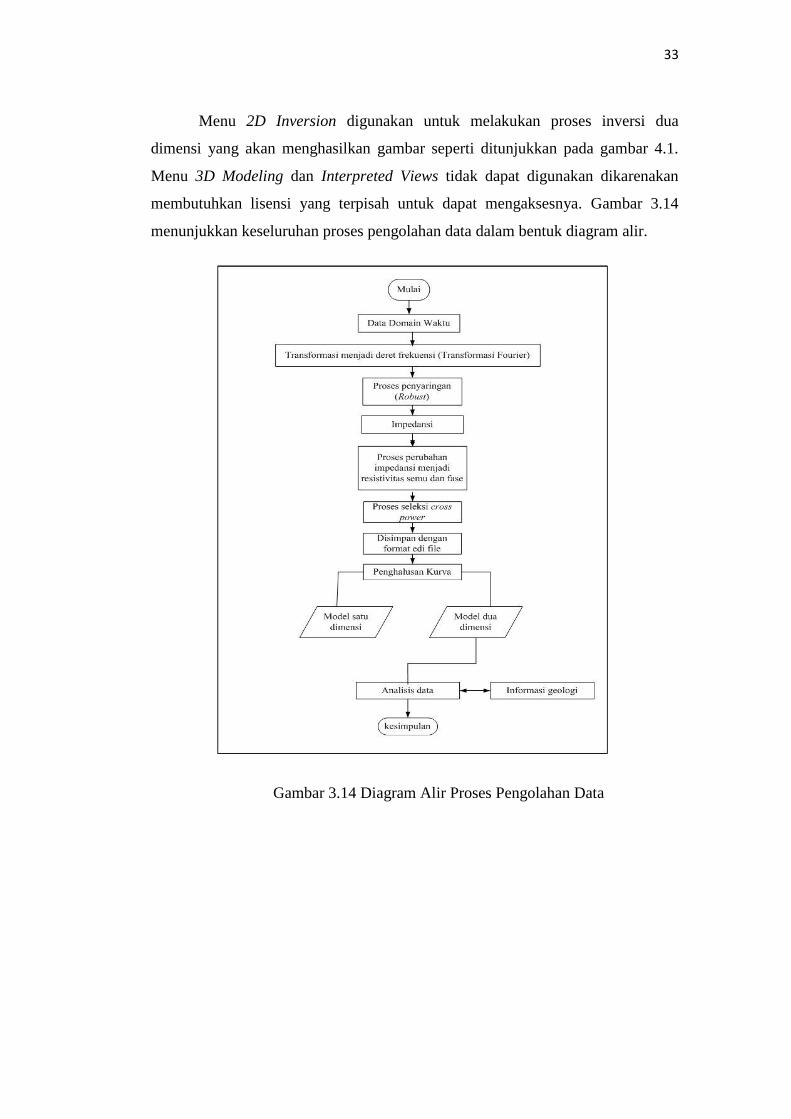
Menu 2D Inversion digunakan untuk melakukan proses inversi dua
dimensi yang akan menghasilkan gambar seperti ditunjukkan pada gambar 4.1.
Menu 3D Modeling dan Interpreted Views tidak dapat digunakan dikarenakan
membutuhkan lisensi yang terpisah untuk dapat mengaksesnya. Gambar 3.14
menunjukkan keseluruhan proses pengolahan data dalam bentuk diagram alir.
Gambar 3.14 Diagram Alir Proses Pengolahan Data
34
3.6 Analisis Data
Hasil akhir dari pengolahan data berupa model inversi dua dimensi
struktur bawah permukaan yang berisi informasi resistivitas terhadap kedalaman.
Sebaran resistivitas direpresentasikan oleh warna tertentu. Resistivitas warna
merah menunjukkan nilai resistivitas yang terendah sedangkan resistivas warna
biru menunjukkan resistivitas yang tertinggi dan resistivitas warna hijau
menunjukkan nilai resistivitas sedang.
Berdasarkan nilai resistivitas tersebut dapat ditentukan batuan penyusun
sistem panas bumi. Batuan penyusun panas bumi terdiri dari caprock, reservoir
dan heat source. Caprock mempunyai nilai resistivitas rendah. Reservoir
mempunyai nilai resisitivitas sedang sedangkan heat source mempunyai nilai
resistivitas yang besar.





























