Embed Size (px)
Citation preview
BAB II
TINJAUAN PUSTAKA DAN LANDASAN TEORI
Pada bab ini akan dijelaskan tentang dua poin yaitu tinjauan pustaka dan
landasan teori. Tinjauan pustaka akan menjelaskan literatur yang akan menjadi
inspirasi maupun referensi bagi penulis dalam pembuatan proyek akhir ini,
sedangan landasan teori akan berisikan mengenai teori bagian-bagian yang
digunakan pada proyek akhir ini.
2.1 Tinjauan Pustaka
Dalam realisasi sistem ini, prinsip yang digunakan adalah prinsip
keseimbangan pada kursi dengan menggunakan kendali PID yang akan diatur oleh
sinyal sensor accelerometer serta respon motor servo yang akan melakukan
perintah dari kendali yang diberikan. Arduino Nano sebagai mikrokontroler dengan
memfungsikan modul I/O serta rangkaian pengondisi sinyal sebagai penguat.
Topik mengenai keseimbangan pada kursi menggunakan kendali PID yaitu
pengembangan dari Stabilizer Camera dan Gimbal Quadcopter. Beberapa topik
yang dapat dijumpai dalam beberapa literatur sebagai berikut :
1. Rancang Bangun Sistem Penstabil Kamera Untuk Foto Udara [1]
2. Desain dan implementasi sistem kendali pada inverted pendulum sebagai modul
pembelajaran dilaboratorium sistem kendali [2]
3. Implementasi Quadcopter Untuk Pengambilan Gambar [3]
4. Perancangan Dan Realisasi Sistim Kendali Pid Dan Filter Kalman Pada Segway
[4]
5. Desain Dan Implementasi Sistem Kendali Pada Inverted Pendulum Sebagai
Modul Pembelajaran Dilaboratorium Sistem Kendali[5]
Mengacu pada uraian tinjauan pustaka diatas proyek akhir ini akan dilakukan
modifikasi dimana sistem keseimbangan pada kamera menjadi sistem
keseimbangan pada kursi. Alat ini menggunakan kendali PID untuk menjaga
keseimbangan.
2.2 Landasan Teori
Pada bagian ini akan dijelaskan mengenai teori-teori yang berkaitan dengan
pengerjaan dan perancangan proyek akhir yang dilakukan.
2.2.1 Sistem Kendali
Sistem kendali adalah suatu proses pengendalian terhadap besaran sehingga
mencapai setpoint yang telah ditentukan. Sistem kendali dibuat agar rancangan
yang dibuat sesuai dengan keinginan dan mempercepat respon agar mendapatkan
output secepat mungkin. Sistem kendali yang baik harus meliputi parameter –
parameter yang membuat sistem yang dibuat lebih stabil dan lebih baik, berikut
yang harus diperlukan untuk membuat parameter sistem kendali menjadi lebih baik:
1. Cara kerja sistem kendali
2. Keterbatsan pengetahuan operator dalam pengendalian proses
3. Peran instrumentasi dalam membantu operator pada pengendalian proses
Terdapat 3 kontrol PID yaitu PI, PD, PID. PI merupakan pengontrolan
menggunakan komponen proportional dan intergratif. PD merupakan
pengontrolan menggunakan komponen proportional dan derivative. Sedangkan
PID merupakan pengontrolan menggunakan komponen proportional, integral, dan
derivative. Pada tugas akhir ini kontrol yang digunakan adalah kendali PID (
(Proportional Integral dan Derivative).
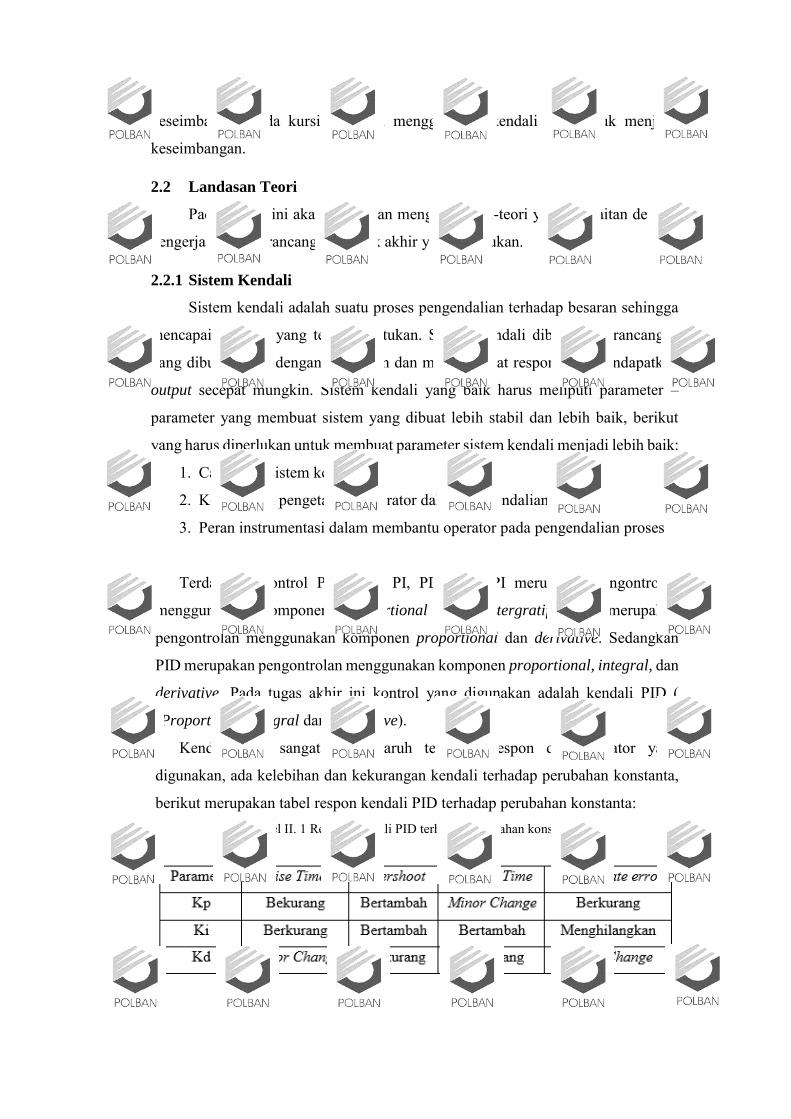
Kendali PID sangat berpengaruh terhadap respon dari aktuator yang
digunakan, ada kelebihan dan kekurangan kendali terhadap perubahan konstanta,
berikut merupakan tabel respon kendali PID terhadap perubahan konstanta: Tabel II. 1 Respon kendali PID terhadap perubahan konstanta
Keterangan :
Kp : Konstanta proportional.
Ki : Konstanta integral.
Kd : Konstanta derivative.
Rise time : waktu yang diperlukan untuk mencapai kondisi
steady state.
Overshoot : respon yang melebihi nilai dari steady state.
Settling time : keadaan dimana sinyal respon akan mancapai
steady state error.
Steady state error: perbedaan antara input dan output sistem dari batas
waktu sampai tak terhingga apabila telah mecapai steady state. Steady state
error akan tergantung pada jenis input dan sistem.
2.2.1.1 PID (Proportional Integral dan Derivative)
PID (Proportional Integral dan Derivative) adalah suatu sistem yang
mempunyai umpan balik pada sistem tersebut. PID banyak digunakan pada industri
manufaktur. Sistem kendali ini juga dapat digunakan sistem kendali tertutup dan
sistem kendali terbuka. Pengontrol PID akan memberikan aksi pada aktuator yang
dipakai berdasarkan hasil error yang diperoleh. PID terdiri dari Propotional ,
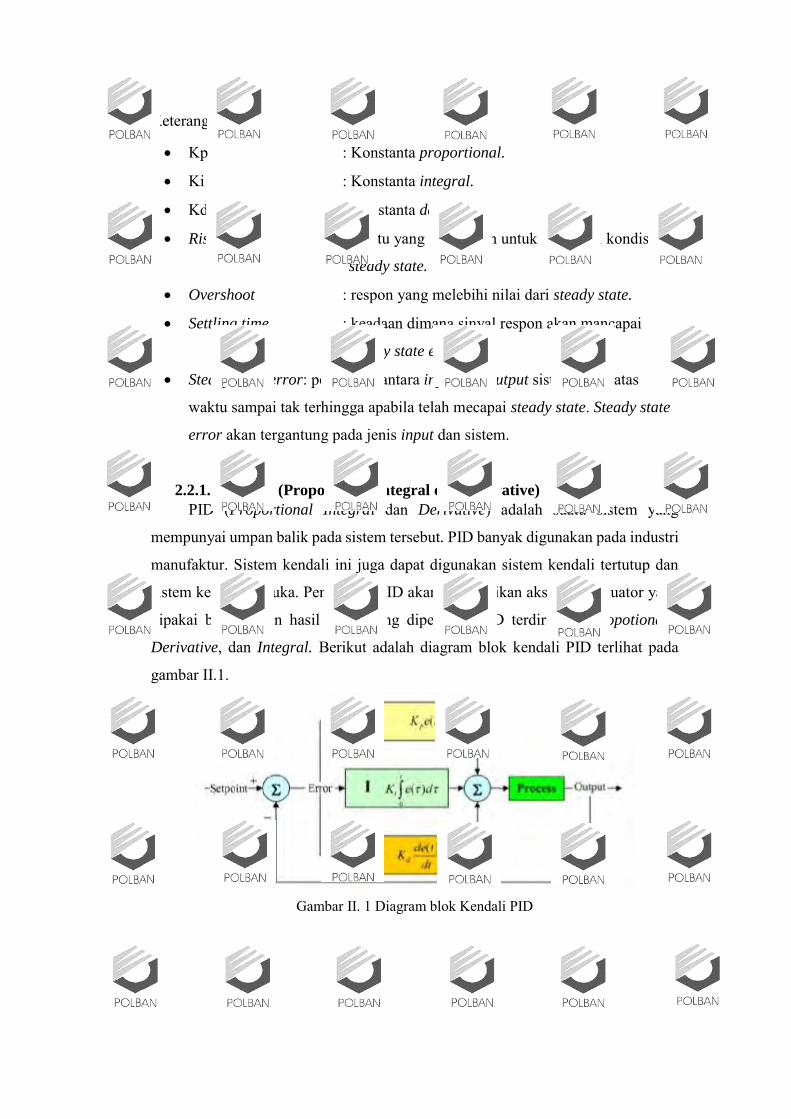
Derivative, dan Integral. Berikut adalah diagram blok kendali PID terlihat pada
gambar II.1.
Gambar II. 1 Diagram blok Kendali PID
a. Kendali proportional
Penggunaan kendali proportional ini dapat mengeluarkan sinyal kontrol
yang besarnya sebanding dengan besar error. Kendali proportional ini dapat
memperbaiki rise time dan settling time, menambah atau mengurangi
kestabilan dan mengurangi error steady state. Dimana nilai proportional
tersebut dapat dihasilkan dengan rumus :
Kp℮(t) ………………………………………………………………(2.1)
b. Kendali integral
Penggunaan kendali Integral ini dapat menghilangkan error steady
steady jika pemilihan Ki yang tidak tepat dapat menyebabkan respon
transient yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem.
Pemilihan Ki yang sangat tinggi justru dapat menyebabkan pengeluaran
output sistem yang berosilasi karena menambah orde sistem. Dimana nilai
integral tersebut dapat dihasilkan dengan rumus :
Ki∫ 𝑒(𝜏)𝑑𝜏𝑖
0 ………………………………………..………………(2.2)
c. Kendali derivative
Penggunaan kendali derivative ini untuk memperbaiki respon transient,
karena memberikan aksi saat ada perubahan error dan juga memberikan
respon lebih cepat. Penggunaan kendali derivative dinyatakan dengan Td
(derivative time) berbanding lurus dengan besarnya output pengontrol.
Dimana nilai derivative tersebut dapat dihasilkan dengan rumus :
Kd𝑑𝑒(𝑡)
𝑑𝑡 ………………………………….…………………………(2.3)
Dari persamaan 2.1 , 2.2 , dan 2.3 maka :
𝑈(𝑘) = 𝐾𝑝𝑒𝑘 + 𝐾𝑖𝑇 ∑ 𝑒𝑘𝐾0 +
1
𝑇𝐾𝐷(𝑒𝑘 − 𝑒𝑘−1)…………………...(2.4)
2.2.1.2 Metode Ziegler Nichols
Metode ini untuk menentuan nilai parameter PID dapat menggunakan
metode diantaranya yaitu Metode Zieglel Nichols I dan Metode Ziegler
Nichols II. Metode ziegler nichols I dikembangkan oleh John G. Zigler dan
Nathaniel B.Nichols. Metode ini dapat digunakan dalam sistem close loop
dan open loop. Sistem close loop merupakan sistem yang mempunyai
feedback untuk mengontrol sedangkan untuk open loop merupakan sistem
kendali yang outputnya tidak dibandingkan dengan input. Untuk membuat
respon lebih baik dilakukan manual tuning dengan cara mengatur komponen
proportional, integral, dan derivative. Berikut merupakan penjelasan dari
metode ziegler nichols I dan ziegler nichols II:
a. Ziegler Nichols I
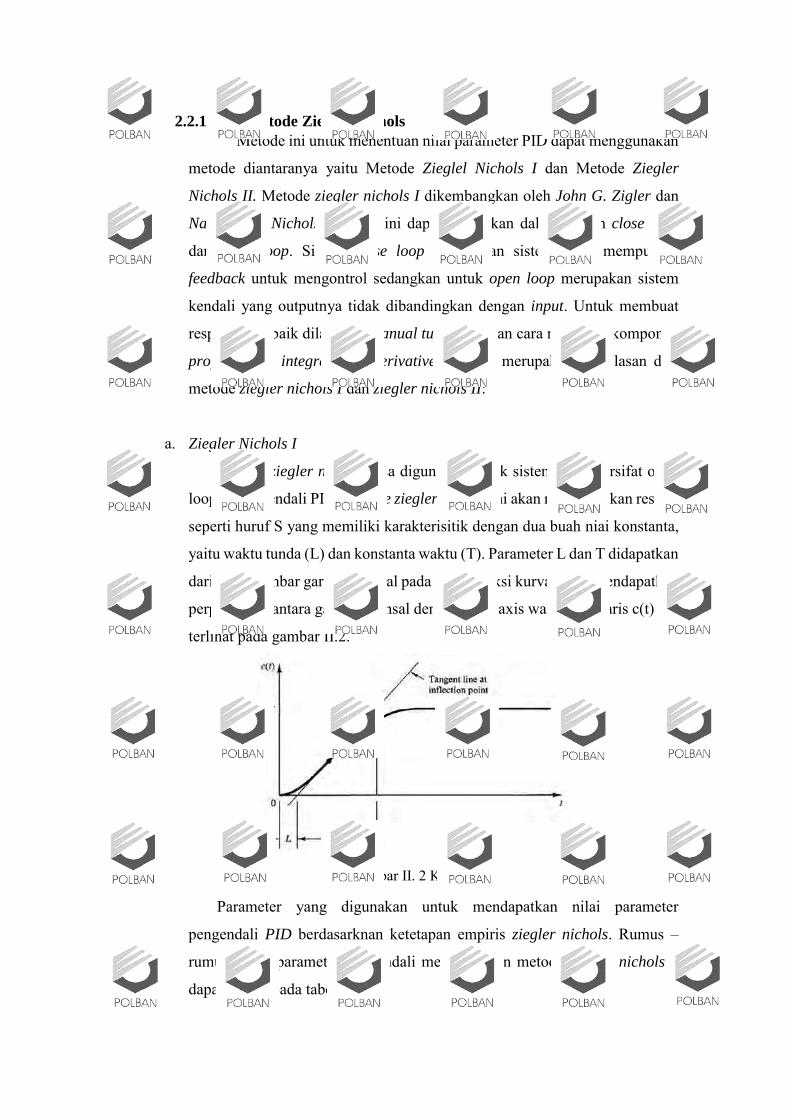
Metode ziegler nichols bisa digunakan untuk sistem yang bersifat open
loop untuk kendali PID. Metode ziegler nichols ini akan menghasilkan respon
seperti huruf S yang memiliki karakterisitik dengan dua buah niai konstanta,
yaitu waktu tunda (L) dan konstanta waktu (T). Parameter L dan T didapatkan
dari menggambar garis tangensal pada titik infleksi kurva S dan mendapatkan
perpotongan antara garis tangensal dengan garis axis waktu dan garis c(t) =K
terlihat pada gambar II.2.
Gambar II. 2 Kurva S
Parameter yang digunakan untuk mendapatkan nilai parameter
pengendali PID berdasarknan ketetapan empiris ziegler nichols. Rumus –
rumus untuk parameter pengendali menggunakan metode ziegler nichols 1
dapat dilihat pada tabel II.2.
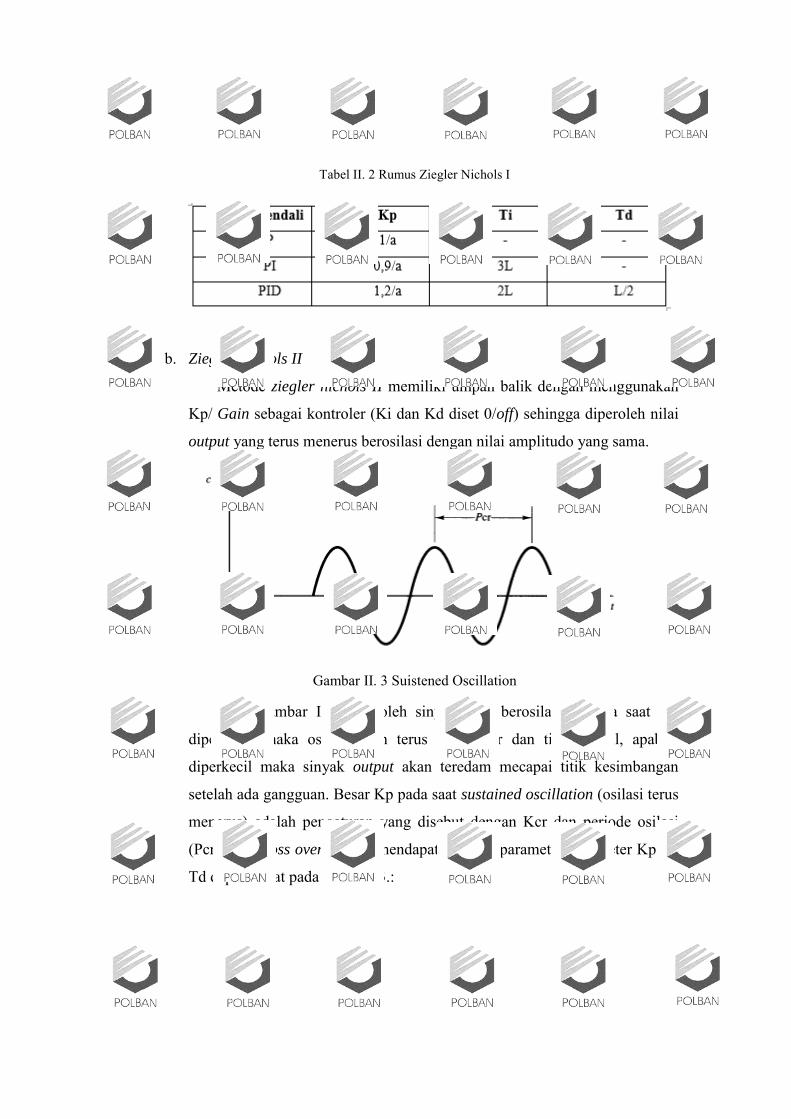
Tabel II. 2 Rumus Ziegler Nichols I
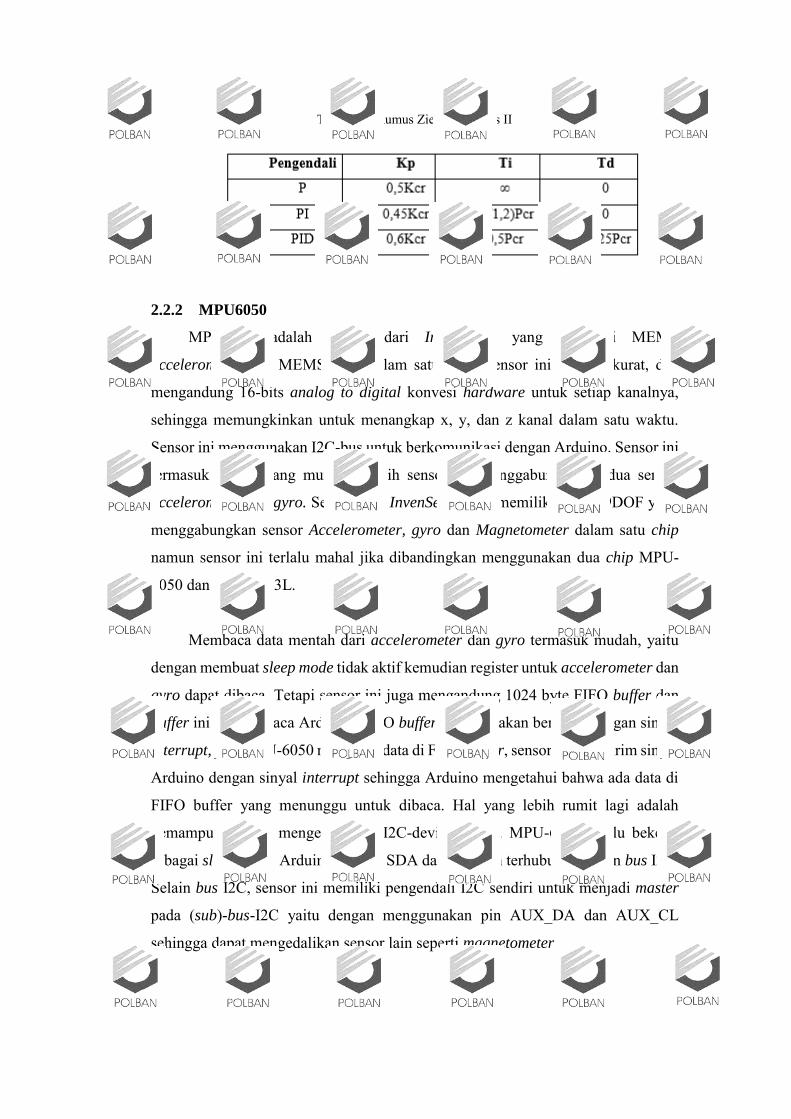
b. Ziegler Nichols II
Metode ziegler nichols II memiliki umpan balik dengan menggunakan
Kp/ Gain sebagai kontroler (Ki dan Kd diset 0/off) sehingga diperoleh nilai
output yang terus menerus berosilasi dengan nilai amplitudo yang sama.
Gambar II. 3 Suistened Oscillation
Pada Gambar II.3 diperoleh sinyal yang berosilasi dimana saat Kp
diperbesar maka osilasi akan terus membesar dan tidak stabil, apabila
diperkecil maka sinyak output akan teredam mecapai titik kesimbangan
setelah ada gangguan. Besar Kp pada saat sustained oscillation (osilasi terus
menerus) adalah pengaturan yang disebut dengan Kcr dan periode osilasi
(Pcr) atau cross over. Untuk mendapatkan nilai parameter parameter Kp,Ti,
Td dapat diihat pada Tabel II.3.:
Tabel II. 3 Rumus Ziegler Nichols II
2.2.2 MPU6050
MPU6050 adalah sensor dari InvenSense yang memiliki MEMS
accelerometer dan MEMS gyro dalam satu chip. Sensor ini sangat akurat, dan
mengandung 16-bits analog to digital konvesi hardware untuk setiap kanalnya,
sehingga memungkinkan untuk menangkap x, y, dan z kanal dalam satu waktu.
Sensor ini menggunakan I2C-bus untuk berkomunikasi dengan Arduino. Sensor ini
termasuk sensor yang murah terlebih sensor ini menggabungkan kedua sensor
accelerometer dan gyro. Sebenarnya InvenSense juga memiliki sensor 9DOF yang
menggabungkan sensor Accelerometer, gyro dan Magnetometer dalam satu chip
namun sensor ini terlalu mahal jika dibandingkan menggunakan dua chip MPU-
6050 dan HMC5833L.
Membaca data mentah dari accelerometer dan gyro termasuk mudah, yaitu
dengan membuat sleep mode tidak aktif kemudian register untuk accelerometer dan
gyro dapat dibaca. Tetapi sensor ini juga mengandung 1024 byte FIFO buffer dan
buffer ini dapat dibaca Arduino. FIFO buffer ini digunakan bersama dengan sinyal
interrupt, jika MPU-6050 mengirim data di FIFO buffer, sensor ini mengirim sinyal
Arduino dengan sinyal interrupt sehingga Arduino mengetahui bahwa ada data di
FIFO buffer yang menunggu untuk dibaca. Hal yang lebih rumit lagi adalah
kemampuan untuk mengendalikan I2C-device kedua. MPU-6050 selalu bekerja
sebagai slave unutk Arduino dengan SDA dan SCL pin terhubung dengan bus I2C.
Selain bus I2C, sensor ini memiliki pengendali I2C sendiri untuk menjadi master
pada (sub)-bus-I2C yaitu dengan menggunakan pin AUX_DA dan AUX_CL
sehingga dapat mengedalikan sensor lain seperti magnetometer.
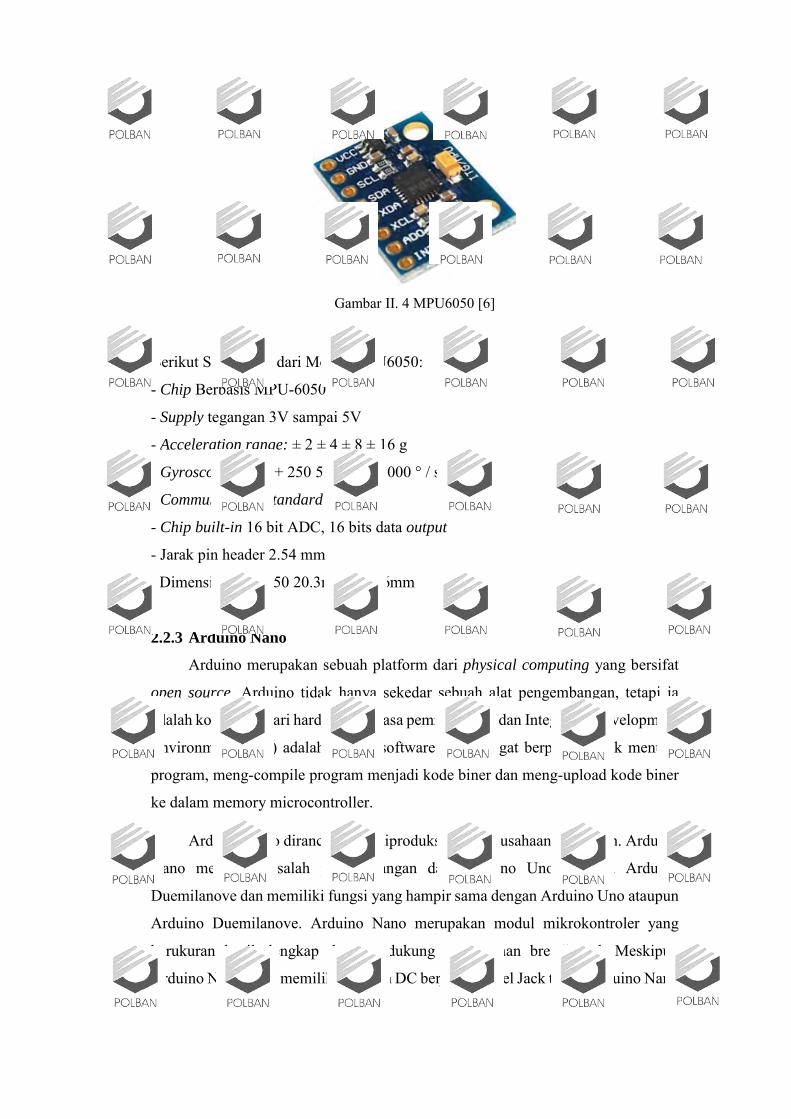
Gambar II. 4 MPU6050 [6]
Berikut Spesifikasi dari Modul MPU6050:
- Chip Berbasis MPU-6050
- Supply tegangan 3V sampai 5V
- Acceleration range: ± 2 ± 4 ± 8 ± 16 g
- Gyroscope range + 250 500 1000 2000 ° / s
- Communication standard I2C
- Chip built-in 16 bit ADC, 16 bits data output
- Jarak pin header 2.54 mm
- Dimensi MPU-6050 20.3mm x 15.6mm
2.2.3 Arduino Nano
Arduino merupakan sebuah platform dari physical computing yang bersifat
open source. Arduino tidak hanya sekedar sebuah alat pengembangan, tetapi ia
adalah kombinasi dari hardware, bahasa pemrograman dan Integrated Development
Environment (IDE) adalah sebuah software yang sangat berperan untuk menulis
program, meng-compile program menjadi kode biner dan meng-upload kode biner
ke dalam memory microcontroller.
Arduino Nano dirancang dan diproduksi oleh perusahaan Gravitech. Arduino
Nano merupakan salah pengembangan dari Arduino Uno ataupun Arduino
Duemilanove dan memiliki fungsi yang hampir sama dengan Arduino Uno ataupun
Arduino Duemilanove. Arduino Nano merupakan modul mikrokontroler yang
berukuran kecil, lengkap dan mendukung penggunaan breadboard. Meskipun
Arduino Nano tidak memiliki colokan DC berjenis Barrel Jack tetapi Arduino Nano
dapat dihubungkan ke komputer menggunakan port USB Mini-B. Arduino Nano
sendiri memiliki 2 tipe yaitu arduino nano, yaitu
1. Arduino nano berbasis mikrokontroler ATmega328 (untuk Arduino
Nano versi 3.x)
2. Arduino nano berbasis mikrokontroler ATmega 168 (untuk Arduino
versi 2.x)
Gambar II. 5 Arduino Nano [7]
Konfigurasi pin Arduino Nano.Arduino Nano memiliki 30 Pin. Berikut
Konfigurasi pin Arduino Nano.
1. VCC merupakan pin yang berfungsi sebagai pin masukan, biasanya
tegangan 5V.
2. GND merupakan pin ground untuk catu daya digital.
3. AREF merupakan Referensi tegangan untuk input analog. Digunakan
dengan fungsi analogReference().
4. RESET merupakan Jalur LOW yang digunakan untuk me-reset atau
menghidupkan ulang mikrokontroler.
5. Serial RX (0) merupakan pin yang berfungsi sebagai penerima TTL data
serial.
6. Serial TX (1) merupakan pin yang berfungsi sebagai pengirim TT data
serial.
7. External Interrupt (Interupsi Eksternal) merupakan pin yang dapat
dikonfigurasi untuk memicu sebuah interupsi.
8. Output PWM 8-Bit merupakan pin yang berfungsi untuk analogWrite( )
9. SPI merupakan pin yang berfungsi sebagai pendukung komunikasi.
10. Lampu LED merupakan pin yang berfungsi sebagai indikator. Lampu LED
merupakan indikator output pin digital 13
11. Input Analog (A0-A7) merupakan pin yang berfungsi sebagi pin yang dapat
diukur/diatur dari mulai Ground sampai dengan 5 Volt, juga memungkinkan
untuk mengubah titik jangkauan tertinggi atau terendah mereka
menggunakan fungsi analogReference().
Berikut ini adalah spesifikasi yang dimiliki oleh Arduino Nano:
1. MikrokontrolerAtmel ATmega168 atau ATmega328
2. 5 V Tegangan Operasi
3. 7-12VInput Voltage (disarankan)
4. 6-20VInput Voltage (limit)
5. Pin Digital I/O 14 pin
6. 6 Pin output PWM
7. 8 Pin Input Analog
8. 40 mA Arus DC per pin I/O
9. Flash Memory 16KB pada ATmega168 atau 32KB pada ATmega328 dan
2KB digunakan oleh Bootloader. 1 KbyteSRAM (ATmega168) atau 2
Kbyte(ATmega328)
10. 512 ByteEEPROM (ATmega168) atau 1Kbyte (ATmega328)
11. 16 MHz Clock Speed
12. Ukuran1.85cm x 4.3cm
Untuk dapat menggunakan Arduino maka diperlukan sebuah software IDE Arduno.
IDE Arduino terdiri dari:
Editor program, sebuah window yang memungkinkan pengguna menulis
dan mengedit program dalam bahasa Processing.
Compiler, sebuah modul yang mengubah kode program (bahasa Processing)
menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa
memahami bahasa Processing. Yang bisa dipahami oleh microcontroller
adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
Uploader, sebuah modul yang memuat kode biner dari Jomputer ke dalam
memory di dalam papan Arduino.
Berikut ini adalah contoh tampilan IDE Arduino:
Gambar II. 6 Tampilan software IDE Arduino pada desktop
Gambar II. 7 Interface Arduino IDE.
2.2.4 Motor Servo
Motor servo adalah sebuah motor DC yang memiliki sistem umpan balik
tertutup, di mana posisi rotor-nya akan menjadi sensor kembali ke rangkaian kontrol
yang terdapat di dalam motor servo. Motor servo terdiri dari sebuah motor DC,
rangkaian kontrol, serangkaian gear, dan potensiometer. Sudut dari sumbu motor
servo diatur berdasarkan lebar pulsa (PWM) yang dikirim melalui kaki. Sedangkan
potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Motor
servo memiliki keunggulan, adapun keunggulannya, yaitu:
• Tidak ber-resonansi saat beroperasi.
• Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
• Penggunaan arus sebanding dengan beban yang diberikan.
• Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder
• Tidak berisik saat beroperasi dengan kecepatan tinggi.
Adapun kelemahan yang di miliki motor servo, yaitu:
• Memerlukan pengaturan yang tepat untuk menstabilkan umpan balik.
• Motor menjadi tidak terkendali jika encoder tidak memberikan umpan balik.
• Beban berlebih dalam jarak waktu yang lama dapat merusak motor.
Gambar II. 8 Motor Servo [8]
Gambar II. 9 Komponen Motor Servo [9]
2.2.5 PWM (Pulse Width Modulation)
PWM atau Pulse Width Modulation merupakan sebuah mekanisma untuk
membangkitkan sinyal ouput yang memiliki perioden berulang antara high dan low.
Dimana dalam mengontrol durasi sinyal high ataupun low dapat di sesuaikan
dengan yang kita inginkan. Dalam PWM terdapat Duty cycle. Dimana Duty cycle
merupakan persentase periode sinyal high dan periode total sinyal, persentase duty
cycle akan bebanding lurus dengan nilai tegangan rata-rata yang dihasilkan.
Pengaturan lebar PWM merupakan salah satu teknik yang digunakan dalam
sistem kendali (control system). Pengaturan lebar modulasi dipergunakan di
berbagai bidang yang sangat luas, salah satu diantaranya adalah: speed control,
power control, maupun measurement and communication.
Modulasi lebar pulsa (PWM) dapat dicapai atau diperoleh dengan bantuan
sebuah gelombang kotak yang mana siklus kerja duty cycle gelombang dapat
diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang
merupakan nilai ratarata dari gelombang kotak tersebut.
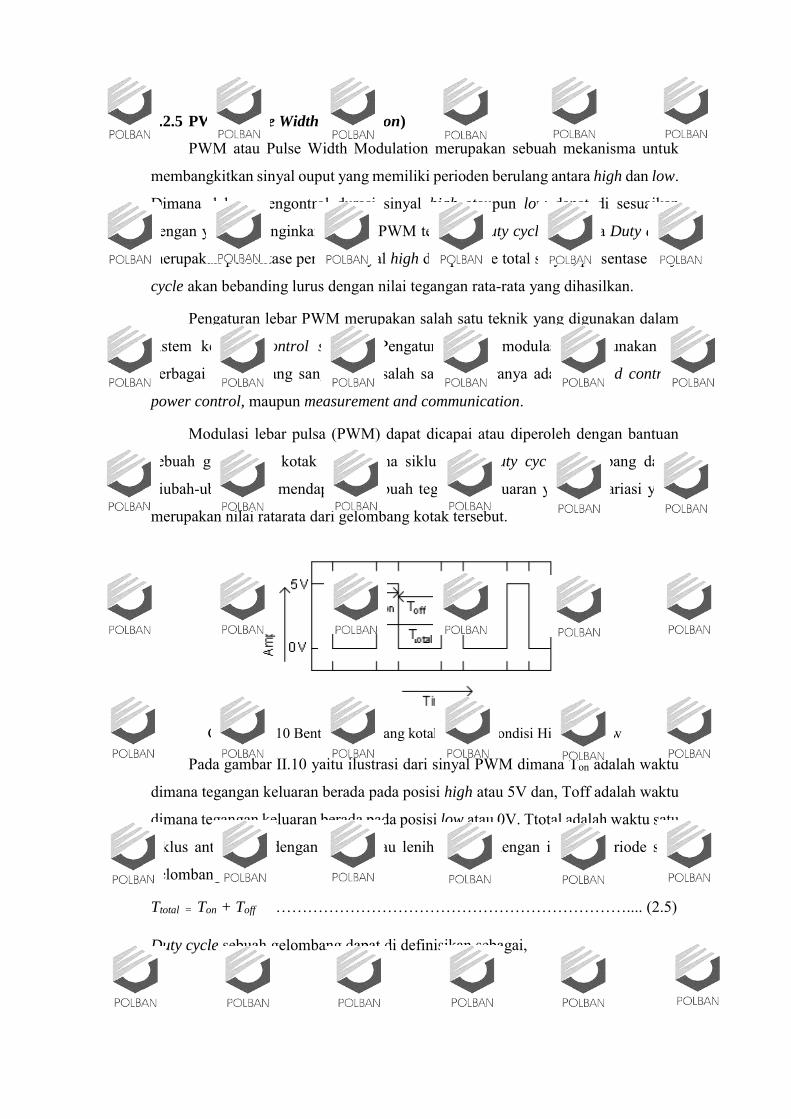
Gambar II. 10 Bentuk gelombang kotak dengan kondisi High dan Low
Pada gambar II.10 yaitu ilustrasi dari sinyal PWM dimana Ton adalah waktu
dimana tegangan keluaran berada pada posisi high atau 5V dan, Toff adalah waktu
dimana tegangan keluaran berada pada posisi low atau 0V. Ttotal adalah waktu satu
siklus antara Ton dengan Toff , atau lenih dikenal dengan istilah “periode satu
gelombang”.
Ttotal = Ton + Toff ………………………………………………………….... (2.5)
Duty cycle sebuah gelombang dapat di definisikan sebagai,
D = 𝑇𝑜𝑛
𝑇𝑜𝑛+𝑇𝑜𝑓𝑓 = 𝑇𝑜𝑛
𝑇𝑡𝑜𝑡𝑎𝑙 ........................…………………………………...........(2.6)
Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumusan sebagai
berikut,
Vout = D x Vin sehingga : Vout = 𝑇𝑜𝑛
𝑇𝑡𝑜𝑡𝑎𝑙 x Vin ………............................................ (2.7)
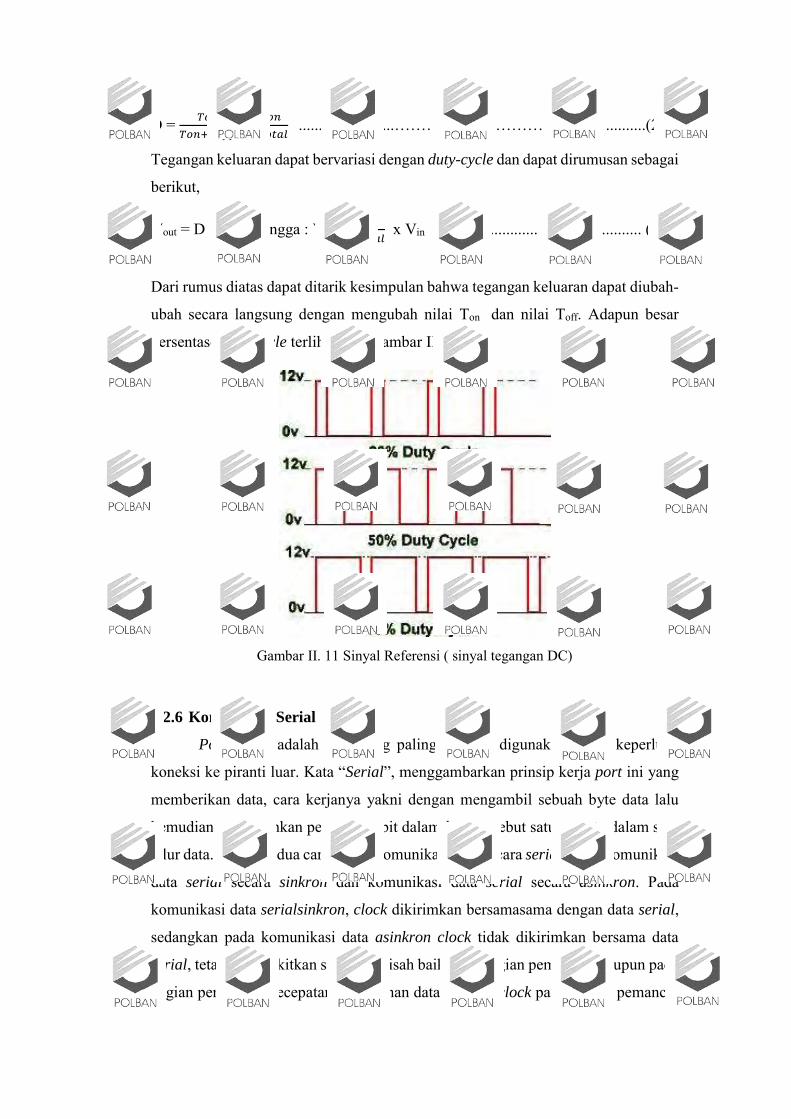
Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat diubah-
ubah secara langsung dengan mengubah nilai Ton dan nilai Toff. Adapun besar
persentase duty-cycle terlihat pada gambar II.11.
Gambar II. 11 Sinyal Referensi ( sinyal tegangan DC)
2.2.6 Komunikasi Serial
Port serial adalah port yang paling populer digunakan untuk keperluan
koneksi ke piranti luar. Kata “Serial”, menggambarkan prinsip kerja port ini yang
memberikan data, cara kerjanya yakni dengan mengambil sebuah byte data lalu
kemudian mengirimkan perdelapan bit dalam byte tersebut satu persatu dalam satu
jalur data. Terdapat dua cara dalam komunikasi data secara serial, yaitu komunikasi
data serial secara sinkron dan komunikasi data serial secara asinkron. Pada
komunikasi data serialsinkron, clock dikirimkan bersamasama dengan data serial,
sedangkan pada komunikasi data asinkron clock tidak dikirimkan bersama data
serial, tetapi dibangkitkan secara terpisah baik pada bagian pemancar maupun pada
bagian penerima. Kecepatan pengiriman data dan faseclock pada bagian pemancar
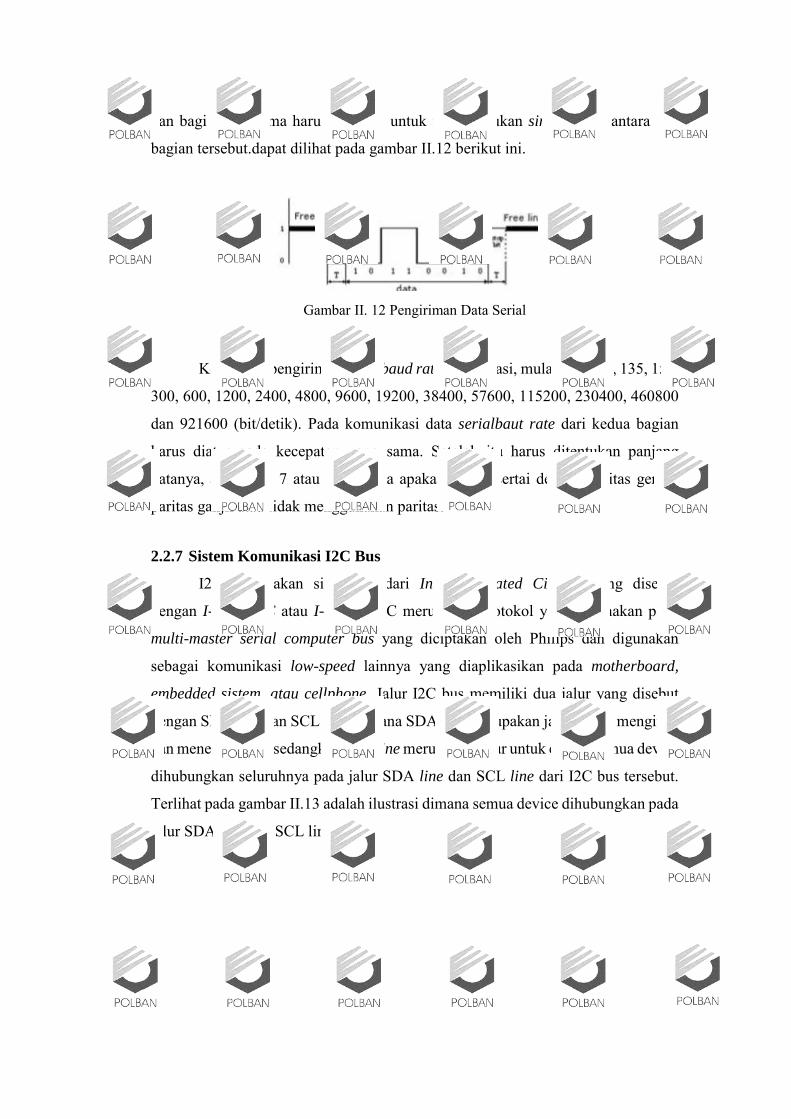
dan bagian penerima harus sinkron, untuk itu diperlukan sinkronisasi antara dua
bagian tersebut.dapat dilihat pada gambar II.12 berikut ini.
Gambar II. 12 Pengiriman Data Serial
Kecepatan pengiriman data (baud rate) bervariasi, mulai dari 110, 135, 150,
300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200, 230400, 460800
dan 921600 (bit/detik). Pada komunikasi data serialbaut rate dari kedua bagian
harus diatur pada kecepatan yang sama. Setelah itu harus ditentukan panjang
datanya, apakah 6, 7 atau 8 bit, juga apakah data disertai dengan paritas genap,
paritas ganjil atau tidak menggunakan paritas.
2.2.7 Sistem Komunikasi I2C Bus
I2C merupakan singkatan dari Inter-Integrated Circuit, yang disebut
dengan I-squaredC atau I-two-C. I2C merupakan protokol yang digunakan pada
multi-master serial computer bus yang diciptakan oleh Philips dan digunakan
sebagai komunikasi low-speed lainnya yang diaplikasikan pada motherboard,
embedded sistem, atau cellphone. Jalur I2C bus memiliki dua jalur yang disebut
dengan SDA line dan SCL line, dimana SDA line merupakan jalur untuk mengirim
dan menerima data sedangkan SCL line merupakan jalur untuk clock. Semua device
dihubungkan seluruhnya pada jalur SDA line dan SCL line dari I2C bus tersebut.
Terlihat pada gambar II.13 adalah ilustrasi dimana semua device dihubungkan pada
jalur SDA line dan SCL line.
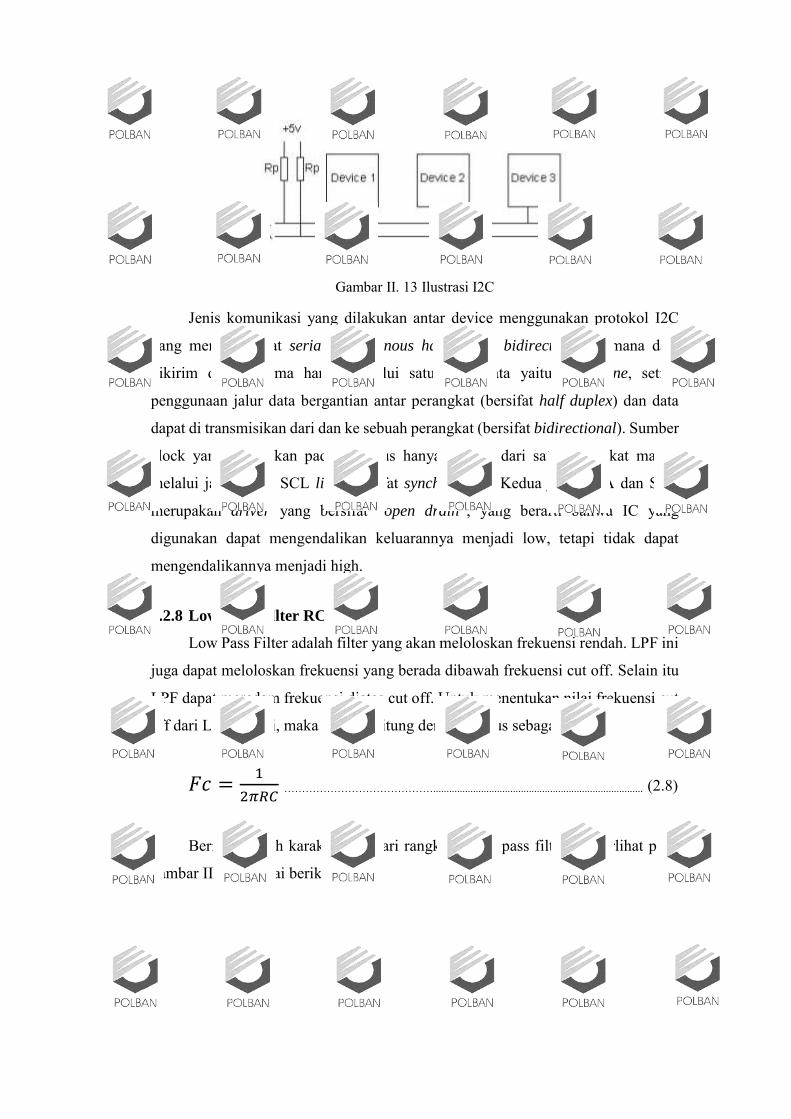
Gambar II. 13 Ilustrasi I2C
Jenis komunikasi yang dilakukan antar device menggunakan protokol I2C
yang memiliki sifat serial synchronous half duplex bidirectional, dimana data
dikirim dan diterima hanya melalui satu jalur data yaitu SDA line, setiap
penggunaan jalur data bergantian antar perangkat (bersifat half duplex) dan data
dapat di transmisikan dari dan ke sebuah perangkat (bersifat bidirectional). Sumber
clock yang digunakan pada I2C bus hanya berasal dari satu perangkat master
melalui jalur clock SCL line (bersifat synchronous). Kedua jalur SDA dan SCL
merupakan driver yang bersifat “open drain”, yang berarti bahwa IC yang
digunakan dapat mengendalikan keluarannya menjadi low, tetapi tidak dapat
mengendalikannya menjadi high.
2.2.8 Low Pass Fillter RC
Low Pass Filter adalah filter yang akan meloloskan frekuensi rendah. LPF ini
juga dapat meloloskan frekuensi yang berada dibawah frekuensi cut off. Selain itu
LPF dapat meredam frekuensi diatas cut off. Untuk menentukan nilai frekuensi cut
off dari LPF RC ini, maka dapat dihitung dengan rumus sebagai berikut:
𝐹𝑐 =1
2𝜋𝑅𝐶 ……………………………………............................................................................... (2.8)
Berikut adalah karakteristik dari rangkaian low pass filter RC terlihat pada
gambar II.14 sebagai berikut ini :
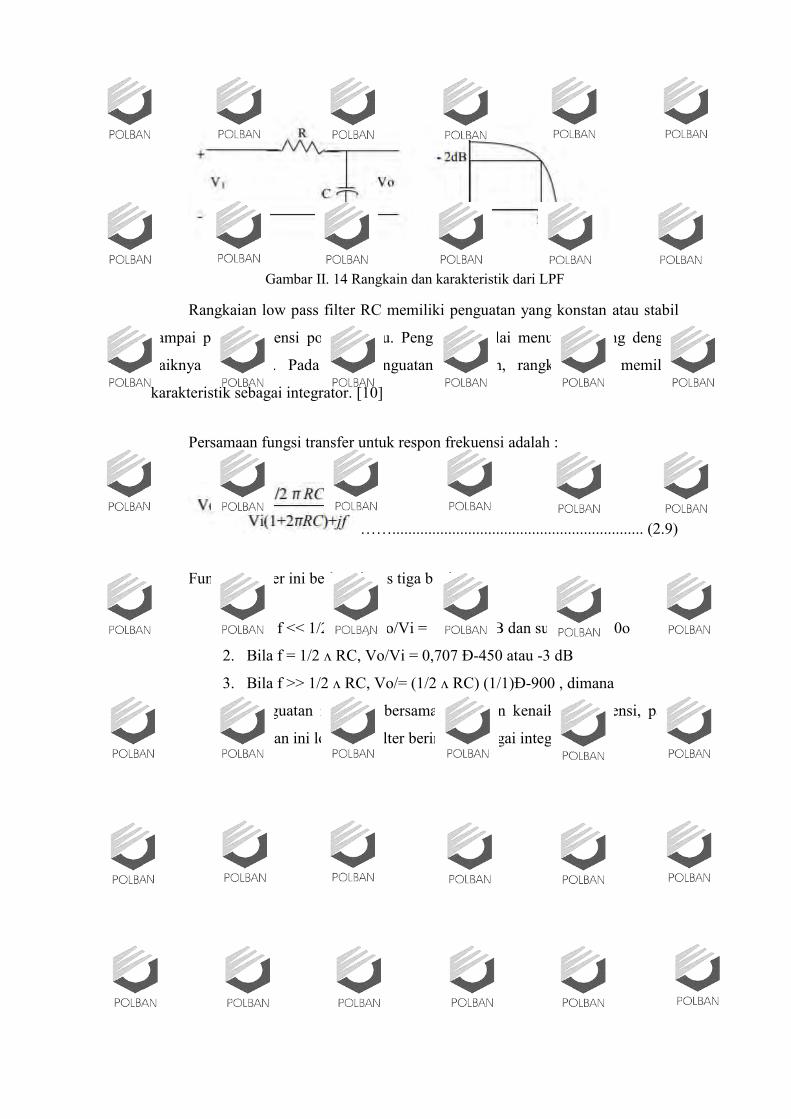
Gambar II. 14 Rangkain dan karakteristik dari LPF
Rangkaian low pass filter RC memiliki penguatan yang konstan atau stabil
sampai pada frekuensi pole tertentu. Penguatan mulai menurun seiring dengan
naiknya frekuensi. Pada saat penguatan menurun, rangkaian ini memiliki
karakteristik sebagai integrator. [10]
Persamaan fungsi transfer untuk respon frekuensi adalah :
……............................................................... (2.9)
Fungsi transfer ini berbagai atas tiga bagian:
1. Bila f << 1/2 ʌ RC, Vo/Vi = 1 atau 0 dB dan sudut phasa 0o
2. Bila f = 1/2 ʌ RC, Vo/Vi = 0,707 Ð-450 atau -3 dB
3. Bila f >> 1/2 ʌ RC, Vo/= (1/2 ʌ RC) (1/1)Ð-900 , dimana
Penguatan menurun bersamaan dengan kenaikan frekuensi, pada
bagian ini low pass filter berindak sebagai integrator.





























