Embed Size (px)
Citation preview

6
BAB II
DASAR TEORI
Fenomena aeroelastik merupakan salah satu batasan dalam perancangan
suatu struktur kendaraan terbang. Oleh karena itu muncullah suatu disiplin ilmu
yang mempelajari tentang fenomena tersebut yang dinamakan aeroelastisitas.
Aeroelastisitas adalah suatu disiplin ilmu yang mempelajari tentang deformasi
pada benda elastis dalam suatu regim aliran udara. Fenomena aeroelastik itu
sendiri dapat dikategorikan dalam dua jenis yaitu static aeroelastic (aeroelastik
statis) dan dynamic aeroelastic (aeroelastik dinamik).
2.1 Aeroelastik Statik
Beberapa tahun yang lalu, Collar menyarankan bahwa Aeroelasticity dapat
divisualisasikan seperti bentuk segitiga pada ilmu dinamika, solid mechanics dan
aerodinamis tidak tunak (unsteady). Gambar seperti pada di bawah ini
Aeroelasticity terkait dengan fenomena fisik yang mana suatu interaksi
diantara inersia, elastisitas dan gaya aerodinamis. Bidang Teknik penting lainnya
dapat diidentifikasikan oleh pasangan tiap-tiap titik pada segitiga. Sebagai contoh:
a. Stabilitas dan pengaturan/control (mekanika penerbangan) = dinamik dan
aerodynamic
b. Getaran struktur = dinamik dan solid mekanik
c. Static Aeroelasticity = aliran tunak aerodinamik dan solid mechanics
Secara konseptual, tiap-tiap bidang pada segitiga tersebut adalah aspek
khusus pada Aeroelasticity. Meskipun pengaruh yang kuat pada stabilitas
Aeroelasticity dan pengaturan pada mekanika terbang dapat meningkatkan
substansi dalam beberapa tahun belakangan ini [1].
Adapun fenomena static aeroelastic terdapat dua jenis permasalahan dasar
yaitu static instability yang biasa disebut divergensi dan aileron reversal.
6
7
2.1.1. Divergensi
Masalah divergensi yang paling umum dijumpai pada struktur adalah
divergensi torsional. Permasalahan ini mengakibatkan patahnya airfoil pada
Fokker D-8 saat melakukan maneuver-tukik meskipun telah diperhitungkan secara
matang berdasarkan kekauan, pengujian statik dan memenuhi kekuatan struktural.
Divergensi torsional terjadi akibat sudut twist yang terjadi pada struktur
airfoil tersebut cukup besar sehingga mengakibatkan kekakuan struktur tidak
mampu lagi menahan momen aerodinamik yang terjadi akibat besarnya sudut
twist tersebut. Dengan kata lain divergensi torsional terjadi bila jumlah momen
aerodinamik dengan momen elastis pada struktur airfoil berharga nol. Fenomena
tersebut terjadi akibat kecepatan dari udara tersebut telah mencapai pada batas
stabilitas statik dari airfoil tersebut [4].
2.1.2. Aileron Reversal
Aileron atau yang disebut juga dengan control surface merupakan bagian
dari airfoil yang berfungsi untuk menambah atau mengurangi gaya angkat. Prinsip
kerja dari aileron adalah untuk membangkitkan tambahan gaya angkat yang
digunakan untuk pengendalian pesawat udara. Normalnya gaya angkat pada
airfoil akan bertambah bila aileron didefleksikan ke bawah dan bila aileron di
defleksikan ke atas maka gaya angkat akan berkurang. Seiring dengan
bertambahnya kecepatan udara di sekitar airfoil maka aerodynamic twisting
moments pun juga akan bertambah sedangkan elastic moment tetap sehingga
kefektifitas aileron untuk menghasilkan gaya angkat akan berkurang. Batas
kecepatan dimana suatu aileron tidak mampu lagi bekerja sebagaimana mestinya
dikenal dengan kecepatan aileron reversal (aileron reversal speed). Sehingga
dapat disimpulkan bahwa aileron reversal merupakan fenomena aeroelastik statik
yang mana aileron tersebut sudah tidak mampu lagi bekerja sebagaimana
fungsinya.

8
2.2 Aeroelastik Dinamik
Sebagaimana yang terlah dijelaskan pada bab I bahwa fenomena aeroelastik
dinamik terjadi akibat adanya interaksi antara 3 gaya yaitu gaya aerodinamika,
gaya inersia dan gaya elastis pada suatu struktur. Fenomena aeroelastik dinamik
itu sendiri dibagi menjadi dua bagian yaitu stabilitas flutter (jika tidak melibatkan
gaya eksitasi dari luar) dan masalah respon dinamik (apabila melibatkan gaya
eksitasi luar seperti: gust (turbulensi udara), buffet (fluktuasi tekanan akibat aliran
yang memisah), landing impact, dsb).
2.2.1. Flutter
Flutter merupakan fenomena berbahaya yang dihadapi dalam struktur
fleksibel yang dikenakan gaya aerodinamis. Sebagai contoh pesawat terbang,
bangunan, kabel telegraf, dan jembatan. Flutter terjadi sebagai akibat interaksi
ketiga bidang yaitu aerodinamika, kekakuan, dan gaya inersia pada struktur.
Dalam pesawat terbang, jika kecepatan angin meningkat, mungkin ada beberapa
yang menjadi titik di mana redaman struktur tidak cukup untuk meredam gerakan
yang meningkat karena energi aerodinamik yang ditambahkan ke struktur.
Getaran ini dapat menyebabkan kerusakan struktur dan karenanya
mempertimbangkan karakteristik flutter adalah penting bagian dari merancang
pesawat terbang. [5]
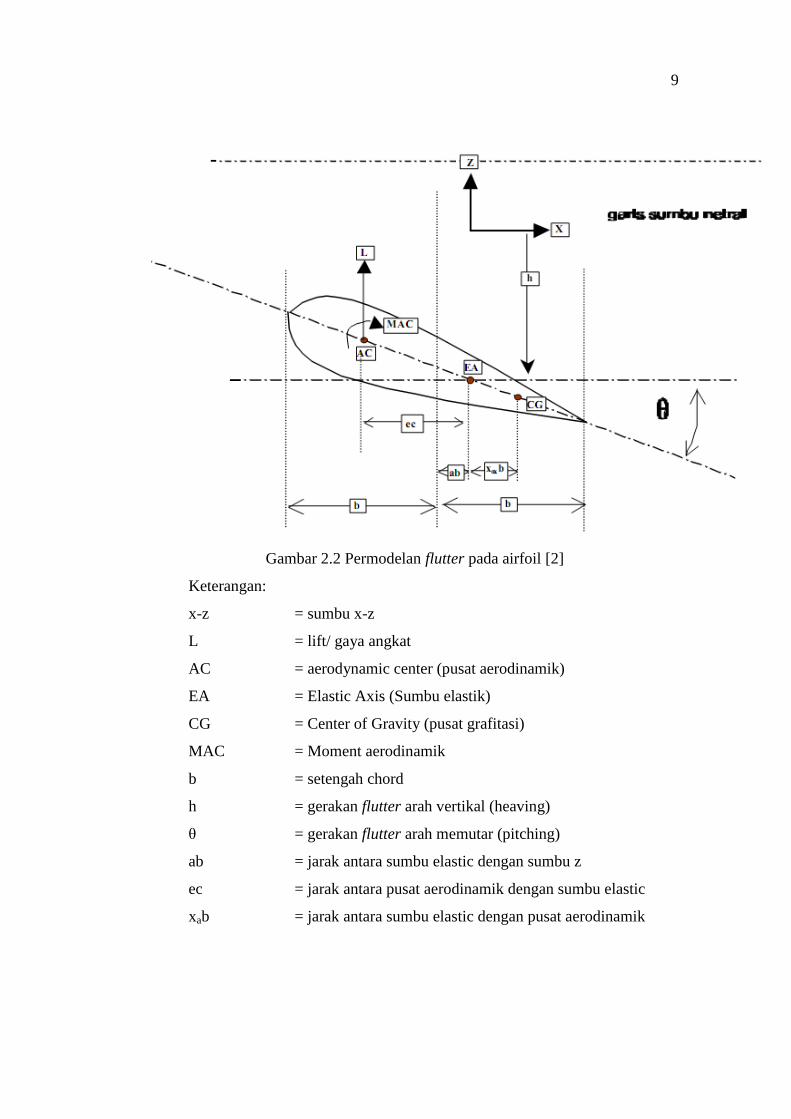
Gambar 2.2 Berikut adalah permodelan flutter pada airfoil yang dimodelkan
dalam dua derajat kebebasan yaitu terhadap arah vertical naik-turun dan sudut.
9
Gambar 2.2 Permodelan flutter pada airfoil [2]
Keterangan:
x-z = sumbu x-z
L = lift/ gaya angkat
AC = aerodynamic center (pusat aerodinamik)
EA = Elastic Axis (Sumbu elastik)
CG = Center of Gravity (pusat grafitasi)
MAC = Moment aerodinamik
b = setengah chord
h = gerakan flutter arah vertikal (heaving)
θ = gerakan flutter arah memutar (pitching)
ab = jarak antara sumbu elastic dengan sumbu z
ec = jarak antara pusat aerodinamik dengan sumbu elastic
xab = jarak antara sumbu elastic dengan pusat aerodinamik
10
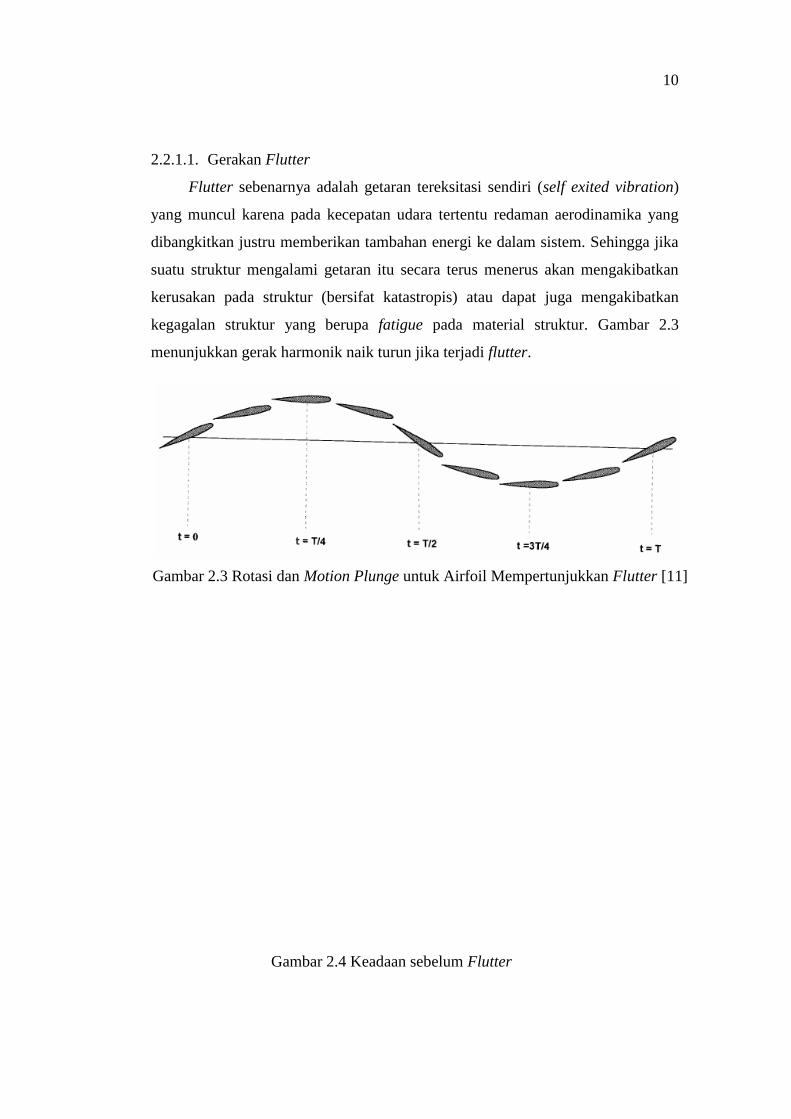
2.2.1.1. Gerakan Flutter
Flutter sebenarnya adalah getaran tereksitasi sendiri (self exited vibration)
yang muncul karena pada kecepatan udara tertentu redaman aerodinamika yang
dibangkitkan justru memberikan tambahan energi ke dalam sistem. Sehingga jika
suatu struktur mengalami getaran itu secara terus menerus akan mengakibatkan
kerusakan pada struktur (bersifat katastropis) atau dapat juga mengakibatkan
kegagalan struktur yang berupa fatigue pada material struktur. Gambar 2.3
menunjukkan gerak harmonik naik turun jika terjadi flutter.
Gambar 2.3 Rotasi dan Motion Plunge untuk Airfoil Mempertunjukkan Flutter [11]
Gambar 2.4 Keadaan sebelum Flutter

11
Pada gambar 2.4 diperlihatkan kondisi dimana flutter belum terjadi, yang
memperlihatkan gejala suatu getaran yang dapat teredam sedangkan gambar 2.5
memperlihatkan suatu kondisi getaran pada saat flutter dimana ketika terjadi
flutter amplitudonya bernilai konstan. Sementara itu pada gambar 2.6
menunjukkan kondisi diatas flutter yang memperlihatkan suatu getaran yang tak
teredan dan memiliki kecenderungan yang makin membesar dan bersifat
divergensi.
Gambar 2.5 Keadaan ketika Flutter [11]
Gambar 2.6 Keadaan setelah Flutter [11]

12
Kondisi pada gambar 2.4, gambar 2.5 dan gambar 2.6 berdasarkan oleh
koalesensi dari dua bentuk modus pitching dan heaving. Bentuk pitching adalah
gerak rotasi pada suatu struktur dan bentuk heaving adalah vertikal atas dan ke
bawah gerak di ujung sayap. Sebagai airfoil dalam peningkatan kecepatan,
frekuensi modus ini bersatu atau datang bersama-sama untuk membuat satu
modus pada frekuensi dan kondisi flutter. [11]
Jika modus getaran struktur yang digunakan dalam analisis dinamis, di
persamaan (2.1) dapat digunakan untuk menentukan karakteristik model flutter.
Persamaan ini merupakan hasil dari dengan asumsi gerak harmonik sederhana
ti
h eutu dan menempatkan ini ke sesuai urutan kedua persamaan
diferensial biasa yang menggambarkan linear dinamis perilaku struktur yang
mengalami gaya dan momen akibat aliran fluida.
024
22
h
R
hhhh
I
hhhhhh u
QVKp
k
cVQBpM
(2.1)
Salah satu bentuk umum dari analisis flutter adalah analisis V-g. Dalam
analisis V-g, struktural redaman semua modus getaran diasumsikan memiliki satu
nilai yang tidak diketahui, g. Dalam Gambar 2.5, hasil untuk dua modus (akar
dari determinan flutter) dari sayap sederhana model dengan 2 derajat kebebasan
yang ditampilkan dalam bentuk kecepatan-redaman dan kecepatan-frekuensi.
Dalam Gambar 2.7, kecepatan dimana salah satu modus melewati g = 0 maka
disitulah kecepatan terjadi fenomena flutter. Sedangkan gambar 2.8 fenomena
terjadinya flutter dapat terlihat ketika modus saling terkopel [3].

13
Gambar 2.7 Diagram V-g (kecepatan-redaman) [14]
Gambar 2.8 Diagram V-f (kecepatan-frekuensi) [14]

14
2.2.1.2. Persamaan Gerak Flutter
Persamaan gerak pada airfoil dengan 2 derajat kebebasan yang mengalami
fenomena flutter, dengan menganggap redaman struktur bernilai nol adalah:
MKIhS
LhKShm h
Dalam bentuk matrik persamaan di atas dapat ditulis menjadi:
0 uQquKuM sss
Dengan matriks massa, kekakuan dan aerodinamis adalah:
IS
SmM s ,
h
h
sK
KK
0
0,
mm
llQ
h
h
s
Dengan vektor posisinya adalah
hu
Dimana
[M] = matriks massa
[Ks] = matriks kekakuan
[Qs] = matriks gaya aerodinamis dependent
[m] = massa struktur
[Sα] = moment statik terhadap sumbu elastik
[Iα] = gaya inersia massa struktur
{u} = vektor posisi
h = perpindahan arah heaving
α = perpindahan arah pitching [4]
(2.2)
(2.3)
(2.4)
(2.5)

15
2.2.2. Respon Dinamik
Seperti hal nya flutter, respon dinamik juga merupakan suatu fenomena
aeroelastik dinamik. Akan tetapi gaya eksitasi yang bekerja pada airfoil tidak
hanya berasal dari gaya aerodinamika saja melainkan berasal dari gaya-gaya luar
yang dapat menjadikan suatu struktur airfoil menjadi tidak stabi. Gaya-gaya
tersebut dapat berasal dari turbulensi udara atau atmosfer (gust). Pola Aliran pada
gust dapat terjadi secara diskrit maupun kontinyu. Gust dapat terjadi karena
perubahan tekanan yang signifikan pada udara, sehingga timbullah kecepatan
yang dihasilkan karena perubahan tekanan tersebut, dan kecepatan yang
ditimbulkan gust tersebut memberikan eksitasi kepada struktur pesawat, sehingga
apabila eksitasi tersebut cukup besar dan terjadi secara terus-menerus, maka tidak
menutup kemungkinan struktur tersebut akan gagal atau rusak sebelum terjadi
flutter. Kemunculan gust tersebut tidak hanya terjadi akibat perubahan tekanan
yang signifikan saja, melainkan dapat pula terjadi akibat ketinggian terbang dari
pesawat yang terlalu rendah. Jadi dapat disimpulkan bahwa beban yang diterima
pesawat yang terbang pada ketinggian yang lebih rendah akan lebih besar jika
dibandingkan dengan pesawat yang terbang pada ketinggian yang lebih tinggi.
Selai gust, gaya eksitasi dari luar yang dapat menimbulkan fenomena respon
dinamik dapat pula berasal dari hentakan pada saat pesawat melakukan
pendaratan atau dikenal dengan istilah landing impact. Selain itu eksitasi yang
dapat menimbulkan fenomena respon dinamik dapat pula terjadi akibat fluktuasi
tekanan yang disebabkan oleh aliran memisah. Kondisi ini dikenal dengan istilah
buffeting. Pemisahan aliran tersebut dapat terjadi akibat sudut serang yang terlalu
besar, sehingga aliran udara akan mulai memisah pada jarak yang lebih dekat
dengan nose, meskipun kecepatannya rendah. Pemisahan aliran udara tersebut
akan menimbulkan terjadinya gelombang-gelombang di sekitar struktur pesawat
dan pastinya akan menimbulkan gaya eksitasi yang akan mengeksitasi struktur
tersebut. Selain karena terlalu besarnya sudut serang buffeting juga dapat terjadi
karena kecepatan dari pesawat yang sangat tinggi, sehingga akan menimbulkan
gelombang kejut yang akan berinteraksi dengan lapisan batas yang akan
mengakibatkan gradient tekanan yang besar dan menyebabkan adanya wake.

16
Adapun persamaan gerak pada airfoil dengan dua derajat kebebasan yang
mengalami respon dinamik, dengan menganggap redaman struktur bernilai nol
adalah:
D
y
D
h
MMKIhS
LLhKShm
Dimana LD dan M
D merupakan komponen lift dan moment aerodinamika
akibat ganggunan, seperti halnya persamaan gerak untuk flutter, persamaan gerak
untuk respon dinamik juga dapat ditulis bentuk matrik.
uFQquQquKuM D
ss
Dimana
[M] = matriks massa
[Ks] = matriks kekakuan
[Qs] = matriks gaya aerodinamis dependent
[LD] = gaya aerodinamika independent
[MD] = moment aerodinamika independent
[m] = massa struktur
[Sα] = moment statik terhadap sumbu elastik
[Iα] = gaya inersia massa struktur
{u} = vektor posisi
h = perpindahan arah heaving
α = perpindahan arah pitching
Adapun contoh daripada respon dinamik yang lain adalah buffeting.
Buffeting adalah ketidaksatbilan frekuensi tinggi yang disebabkan karena
pemisahan aliran udara atau osilasi gelombang kejut dari satu objek ke objek lain.
Hal tersebut dikarenakan suatu dorongan kejut yang disebabkan meningkatnya
gaya (getaran paksa). Umumnya hal itu memempengaruhi dari tail struktur
pesawat terbang akibat aliran udara ke bawah aliran sayap [2].
(2.6)
(2.7)
17
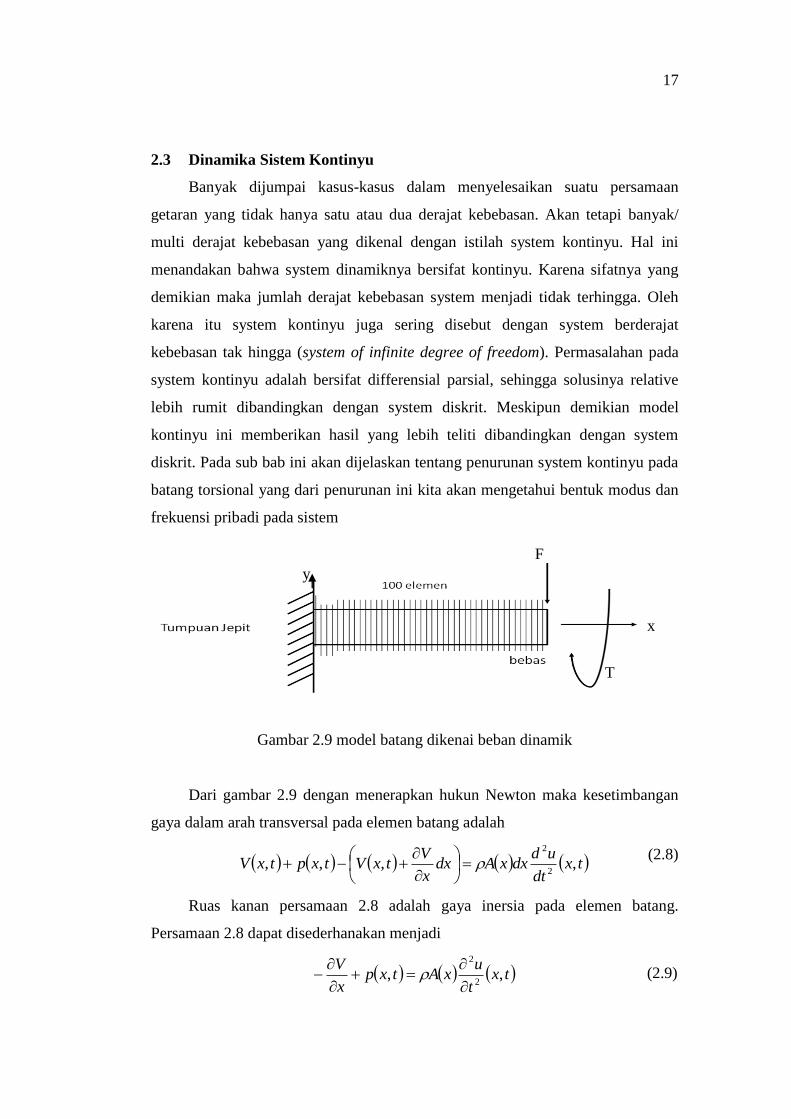
2.3 Dinamika Sistem Kontinyu
Banyak dijumpai kasus-kasus dalam menyelesaikan suatu persamaan
getaran yang tidak hanya satu atau dua derajat kebebasan. Akan tetapi banyak/
multi derajat kebebasan yang dikenal dengan istilah system kontinyu. Hal ini
menandakan bahwa system dinamiknya bersifat kontinyu. Karena sifatnya yang
demikian maka jumlah derajat kebebasan system menjadi tidak terhingga. Oleh
karena itu system kontinyu juga sering disebut dengan system berderajat
kebebasan tak hingga (system of infinite degree of freedom). Permasalahan pada
system kontinyu adalah bersifat differensial parsial, sehingga solusinya relative
lebih rumit dibandingkan dengan system diskrit. Meskipun demikian model
kontinyu ini memberikan hasil yang lebih teliti dibandingkan dengan system
diskrit. Pada sub bab ini akan dijelaskan tentang penurunan system kontinyu pada
batang torsional yang dari penurunan ini kita akan mengetahui bentuk modus dan
frekuensi pribadi pada sistem
Gambar 2.9 model batang dikenai beban dinamik
Dari gambar 2.9 dengan menerapkan hukun Newton maka kesetimbangan
gaya dalam arah transversal pada elemen batang adalah
txdt
uddxxAdx
x
VtxVtxptxV ,,,,
2
2
Ruas kanan persamaan 2.8 adalah gaya inersia pada elemen batang.
Persamaan 2.8 dapat disederhanakan menjadi
txt
uxAtxp
x
V,,
2
2
(2.8)
(2.9)
y
x
F
T

18
Sedangkan kesetimbangan momen pada elemen batang dapat dinyatakan
sebagai
0,,2
,,
txMdxdx
x
VtxV
dxdxtxpdx
x
MtxM
Karena dx cukup kecil maka persamaan 2.10 dapat disederhanakan menjadi
txx
MtxV ,,
Dari mekanika kekuatan bahan persamaan defleksi lentur batang dinyatakan
dengan
txx
wxEItxM ,,
2
2
Kombinasi persamaan (2.9), (2.10), (2.11) dan (2.12) menjadi
txptxx
wxEI
xtx
t
wxA ,,,
2
2
2
2
2
2
Jika momen inersia dan luas penampang batang berharga konstan dan jika
dianggap tidak ada gaya lateral maka persamaan gerak batang transversal dengan
simpangan yang cukup kecil yang mengalami getaran bebas dapat dinyatakan
sebagai PDP orde ke-4:
04
42
2
2
x
wc
t
w dimana
A
EIc
Selanjutnya dengan subtitusi w(x,t)= F(x) G(t) ke persamaan 2.14 dan
dengan menerapkan metode pemisahan aliran diperoleh
tcbtcatG
xDxCxBxAxF
Gc
G
F
F
22
4
2
4
sincos
sinhcoshsincos
Dimana β konstanta. Solusi persamaan 2.25 diberikan oleh
xDxCxBxAtcbtcatxw nnn sinhcoshsincossincos, 22
(2.10)
(2.11)
(2.12)
(2.13)
(2.14)
(2.15)
(2.16)
19
Dimana a, b, A, B, C dan D adalah konstanta yang ditentukan berdasarkan
kondisi batas dan kondisi awal. Selanjutnya dengan menerapkan prinsip
superposisi solusi totalnya diberikan oleh
1
22 sinhcoshsincossincos
,,
n
nn
nn
xDxCxBxAtcbtca
txwtxw
Untuk menggambar bentuk modus pada suatu struktur di dalam tabel 2.1
disajikan bagaimana rumus untuk menentukan bentuk modus dengan variasi
kondisi batas pada struktur.
Adapun kondisi batas dan bentuk modus dalam berbagai kondisi untuk
empat modus pertama ditunjukkan oleh tabel 2.1.
(2.17)

20
Tabel 2.1 Bentuk modus dan konstanta frekuensi pada getaran transversal batang
No Kondisi
Batas
Persamaan Frekuensi Bentuk Modus βnL
1 Tumpuan
sederhana
0sin Ln xCxF nnn sin π
2π
3π
4π
2 Bebas-
Bebas
1coshcos LL nn
xx
xxCxF
nnn
nn
nn
coshcos
sinhsin
LL
LL
nn
nn
n
coscosh
sinhsin
0
4.730041
7.853205
10.995608
14.137165
3 Jepit-jepit 1coshcos LL nn
xx
xxCxF
nnn
nn
nn
coscosh
sinsinh
LL
LL
nn
nn
n
coshcos
sinsinh
0
4.730041
7.853205
10.995608
14.137165
4 Jepit-
bebas
1coshcos LL nn
xx
xxCxF
nnn
nn
nn
coshcos
sinhsin
LL
LL
nn
nn
n
coshcos
sinhsin
1.875104
4.694091
7.854757
10.995541
5 Jepit-
engsel
0tanhtan LL nn
xx
xxCxF
nnn
nn
nn
coscosh
sinhsin
LL
LL
nn
nn
n
coshcos
sinhsin
3.926602
7.068583
10.210176
13.351768
6 Engsel-
bebas
0tanhtan LL nn xxCxF nnnnn sinhsin
3.926602
7.068583
10.210176
13.351768
(2.18)

21
Pada tabel 2.1 Ln = 0 menunjukkan getaran batang pada modus benda
tegar.
2.4 Aerodinamika Tak Tunak (Unsteady Aerodynamics)
Kuantitas gaya aerodinamika tak tunak (unsteady aerodynamics) dapat
ditentukan dengan pengujian terowongan angin (wind tunnel), dihitung secara
analitis maupun dengan software CFD (Computational Fluid Dynamics). Untuk
kasus aliran subsonik, nonviscous, tak rotasional dan tak kompresibel kuantitas
gaya dan momen aerodinamika tak tunak dapat dihitung dengan formulasi
theodorsen [7].
2.4.1. Formulasi Theodorsen
LaMLaMb
hLaMbM
LaLb
hLbL
hah
hh
2
24
23
2
1
2
1
2
1
2
1
V
bk
adalah frekuensi tereduksi
k
iM
M
kCk
i
k
iL
kCk
iL
h
h
8
3
2
1
12
12
2
1
21
Dimana
a = non-dim sumbu elastic diukur dari setengah chord
b = setengah chord
k = frekuensi tereduksi
V = kecepatan
(2.19)
(2.21)
(2.22)
(2.23)
(2.24)
(2.20)
22
ω = frekuensi pribadi
Lh = gaya angkat terhadap heaving
La = gaya angkat terhadap pitching [7]
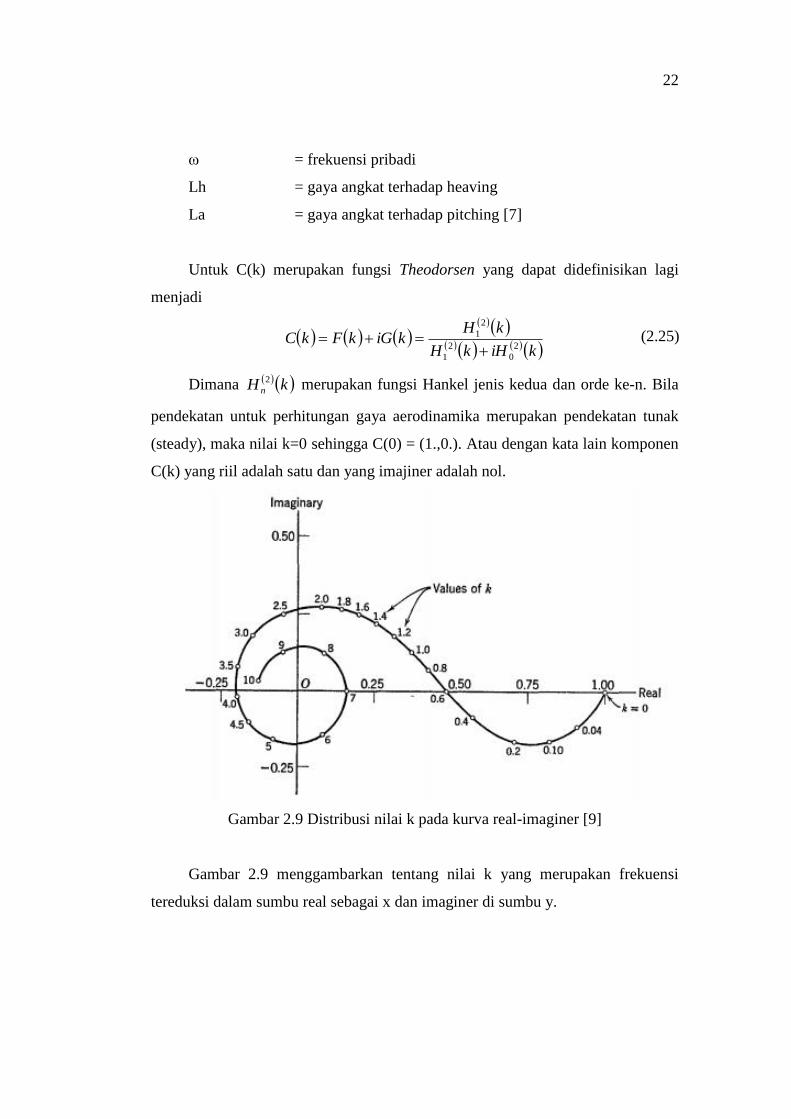
Untuk C(k) merupakan fungsi Theodorsen yang dapat didefinisikan lagi
menjadi
kiHkH
kHkiGkFkC
2
0
2
1
2
1
Dimana kH n
2 merupakan fungsi Hankel jenis kedua dan orde ke-n. Bila
pendekatan untuk perhitungan gaya aerodinamika merupakan pendekatan tunak
(steady), maka nilai k=0 sehingga C(0) = (1.,0.). Atau dengan kata lain komponen
C(k) yang riil adalah satu dan yang imajiner adalah nol.
Gambar 2.9 Distribusi nilai k pada kurva real-imaginer [9]
Gambar 2.9 menggambarkan tentang nilai k yang merupakan frekuensi
tereduksi dalam sumbu real sebagai x dan imaginer di sumbu y.
(2.25)

23
2.4.2. Pendekatan Roger
Fungsi daripada pendekatan roger adalah untuk mentransformasikan
koefisien gaya aerodinamika yang semula dalam bentuk domain frekuensi
menjadi domain waktu. Transformasi ini bertujuan agar persamaan aeroelastik
dapat dinyatakan dalam formulasi ruang keadaan (state space), sehingga lebih
mudah dalam membuat suatu sistem pengendalian untuk mengatasi masalah
fenomena aeroelastik. Prinsip dasar pendekatan roger adalah dengan mendekati
gaya atau koefisien dari gaya-gaya aerodinamika tak tunak dengan deret berikut
[10]:
jnL
l l
ij
jij qMijA
Bp
p
pMijApMijAMijA
qpMA
1 2
2
210
)(
)()()(
,
Dengan i, j= 1, 2, …, N
j
lj
j
lj
jL q
sBb
U
sq
pB
pB
sU
bp
Persamaan pendekatan roger dalam time domain menjadi
nL
l jLl
jj
jij
BMijA
qMijAU
bqMijA
U
bMijA
qtMA
1 2
2
22
2
10
)(
)()()(,
ljljjlj BBb
UqB
(2.26)
(2.27)
(2.28)
(2.29)
(2.30)

24
2.5 Persamaan Flutter dalam Time Domain
Dengan persamaan 2.29 dan 2.30 maka persamaan roger dikembalikan lagi
ke persamaan flutter awal sehingga persamaan flutter telah bertransformasi dalam
domain waktu
02
1
2
1
2
1
2
1
2
2
2
2
10
2
Ll BMAUqMAb
qMAUbqMAUqKqDqM
ljljjlj Bb
UqB
Reduksi ke state space
xAx
Dengan state vector
L
TBrqx ,,
Sistem dinamik matriks
4
3
4
1
3
111
00
00
~~~~~~000
b
uI
b
uI
AMAMDMKM
I
Asp
Keterangan
2
2
2
0
2
1
2
2
2
1~
2
1~
2
1~
2
1~
ll AUA
AUKK
AUbDD
AbMM
qr
dimana
(2.35)
(2.36)
(2.37)
(2.38)
(2.39)
(2.40)
(2.31)
(2.32)
(2.33)
(2.34)
25
Aij = koefisien aerodinamika roger
b = setengah chord
U = variasi Kecepatan
q = vector
x = state vector
l = jumlah lag
[M] = matriks massa
[D] = matriks redaman
[K] = matriks kekakuan
Adapun untuk mengetahui fenomena flutter salah satunya dengan root locus.
Menggambar root locus dengan cara mencari nilai eigen pada matriks Asp. Seperti
persamaan berikut.
xAxs sp
Fungsi daripada gambar root locus hanya mengetahui fenomena flutter tetapi
tidak dapat mengetahui kecepatan flutter [10].
2.6 Persamaan Ruang-Keadaan (State space)
State suatu sistem dinamik adalah sekumpulan minimum variabel (disebut
variabel-variabel state) sedemikian rupa sehingga dengan mengetahui variabel-
variabel tsb pada t = t0, bersama-sama dengan informasi input untuk t ≥ t0, maka
perilaku sistem pada t ≥ t0 dapat ditentukan secara utuh..
Sehingga State space merupakan ruang berdimensi n dengan sumbu-
sumbu x1, x2 ,… xn. Setiap state dapat terletak disuatu titik dalam ruang tsb.
Dari matriks A diatas kemudian mencari state space nya dengan cara
psp uBpxpApx
Dimana
pu
(2.42)
(2.43)
(2.41)

26
Perhitungan numerik
tkt
Menentukan matriks transisi
!
.......!3!2
33
22
m
tA
tA
tAtAIte
mmtA
Menghitung integral
!
.......!3!2
13
22
m
tA
tA
tAtItdte
mmtA
Menghitung x
tkuBttkxttkx 1
Nilai k, k=0,1, ……………..
dimana
x = state space
k = frekuensi tereduksi
∆t = variasi waktu
m = deret faktorial
tAe = pangkat matriks transisi [10]
(2.44)
(2.45)
(2.46)
(2.47)





























