Embed Size (px)
Citation preview
AUV Workbench and Autonomous Vehicle Command
Language (AVCL)
Progress and plans
Don Brutzman and Duane DavisNaval Postgraduate School
18 October 2011
AUV Workbench poster
AUTONOMOUS UNMANNED VEHICLE (AUV) WORKBENCH
Planning, generating and running robot missions
4
Our 3 R’s: rehearsal, reality, replay
Same needs and capabilities for each: mission, visualization, data support, etc.
AUV workbench supports each• ongoing work, starting to mainstream
15 years of accumulated effort• integrating great variety of successful work• new work projects occurring regularly
Collaboration is welcome
Autonomous Unmanned Vehicle (AUV) Workbench builds missions,
tracksModels air, surface, underwater, ground
robots• Currently work: remote operated vehicle
(ROV)• Open-source Java, XML, etc. with online
archives
Autonomous Vehicle Command Language (AVCL): 3-level XML-based language for robot telemetry, mission orders, mission planning• Multiple converters written
• Tools for doing work! Mission displays, GIS, X3D graphics visualization, telemetry plots
6
Rehearsal
Prepare missions, either manually or automatically via other software tools
Test robot software’s ability to perform commands
Test again with physics “in the loop”• Hydrodynamics and control are critical,
difficult• Sonar, environmental modeling
Repeat until robust, with cautious respect• “Simulation is doomed to success” – G.
Bekey
7
Reality: real-time mission support
Monitor mission progressTask-level control using same mission
vocabularyVisualize and supervise operations
• caveat, again: work in progress
Integrate acoustic and RF communications
Chat for distributed collaboration among participants, both human and robotic
8
Record mission metadata for archives
Support operator keeping detailed notes, kept in context when conducting mission
Prompt for full details as appropriateArchive notes for later review and
followup
Future work• Automatic tests to confirm configuration,
control• Automate pre-underway checklists
9
Replay: post-mission support
Automatic archiving of mission to server• Being built into workbench – simplify user
tasks
Integration and compression of all relevant data into single compressed XML file• Metadata for mission• Many pieces: ordered mission, commands,
telemetry, coefficients, contacts, etc. etc.• Autonomous Vehicle Control Language
(AVCL) is Ph.D. work by CDR Duane Davis
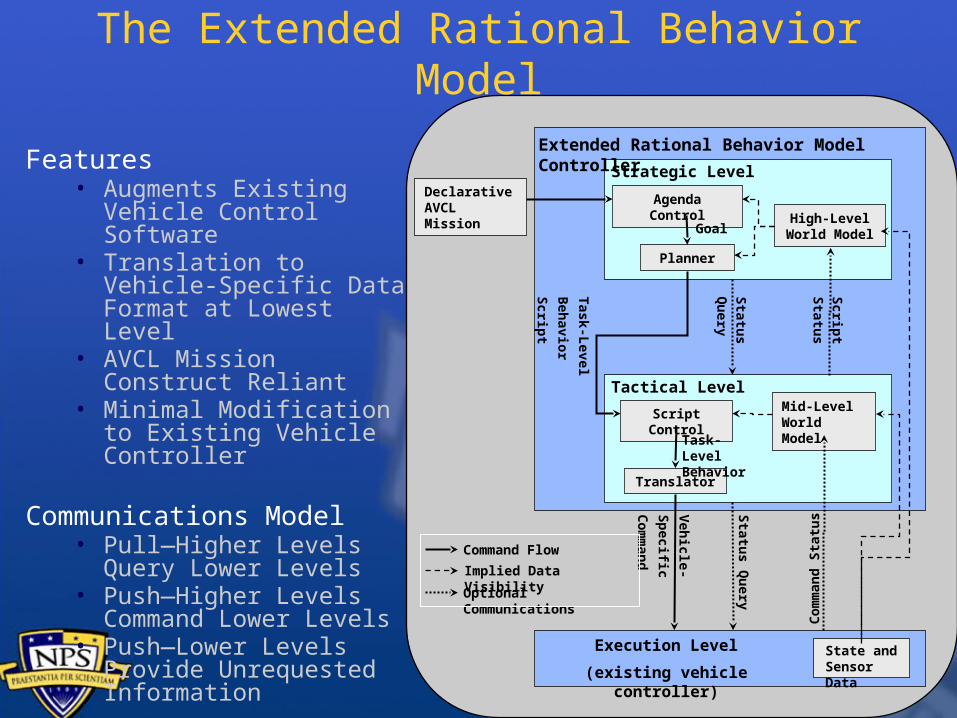
The Extended Rational Behavior Model
Features• Augments Existing
Vehicle Control Software• Translation to Vehicle-
Specific Data Format at Lowest Level
• AVCL Mission Construct Reliant
• Minimal Modification to Existing Vehicle Controller
Communications Model• Pull—Higher Levels
Query Lower Levels• Push—Higher Levels
Command Lower Levels• Push—Lower Levels
Provide Unrequested Information
Strategic Level
Tactical Level
Execution Level
(existing vehicle controller)
Declarative AVCL Mission High-Level
World Model
Mid-Level World Model
State and Sensor Data
Translator
Task-L
evel
Beh
avio
r Scrip
t
Veh
icle
-Sp
ecifi
c
Com
man
d
Sta
tus
Qu
ery
Sta
tus Q
uery
Com
man
d
Sta
tus
Scrip
t S
tatu
s
Script Control
Agenda Control
Planner
Task-Level Behavior
Goal
Command Flow
Implied Data VisibilityOptional Communications
Extended Rational Behavior Model Controller
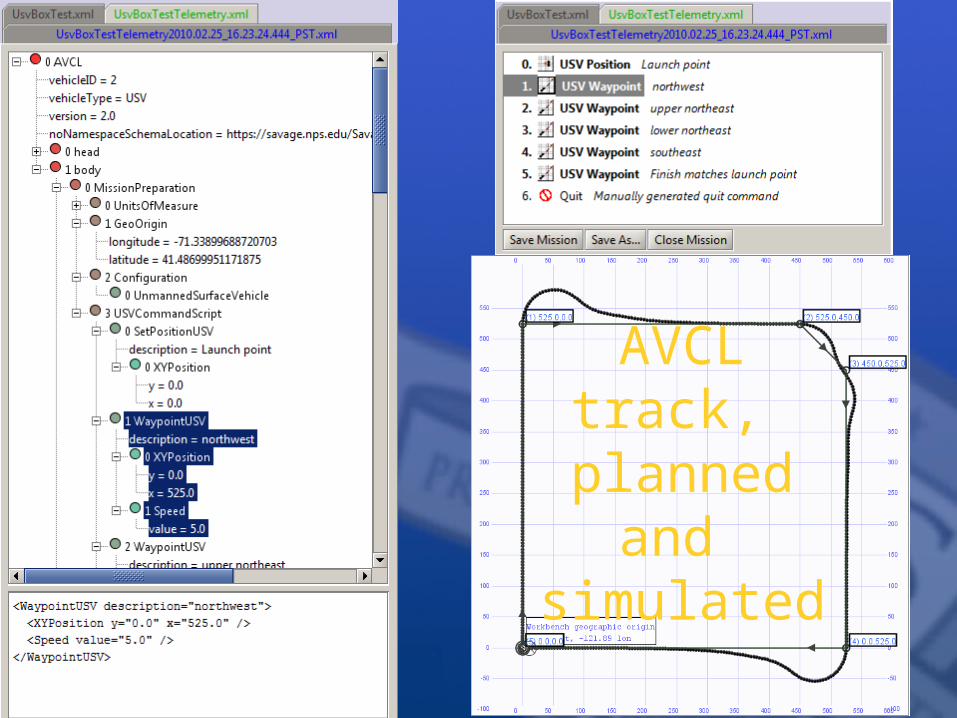
AVCL track, planned and
simulated
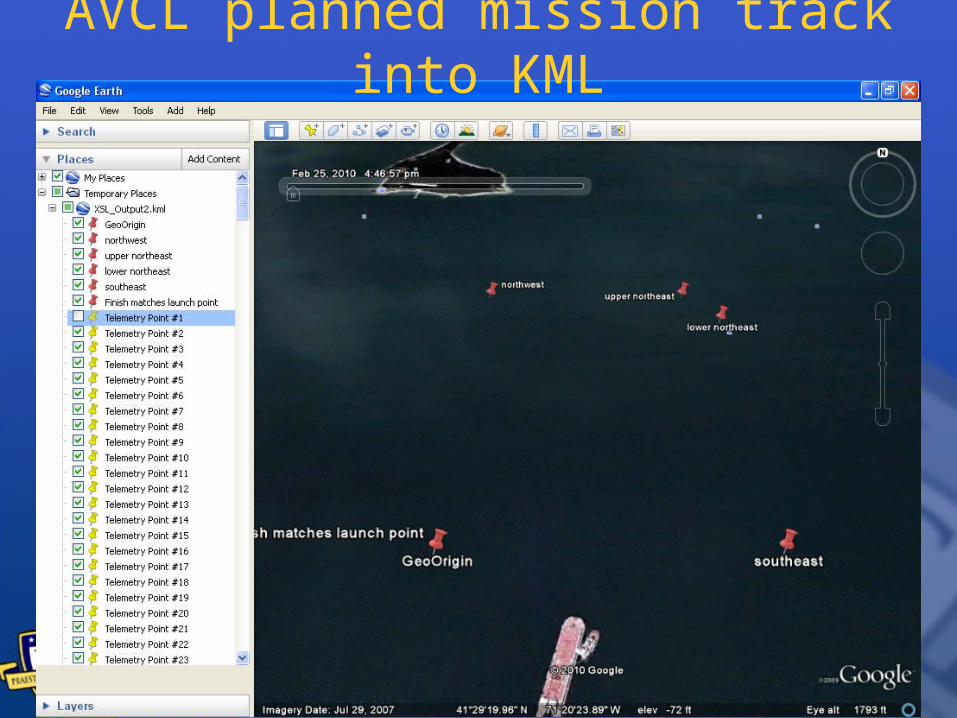
AVCL planned mission track into KML
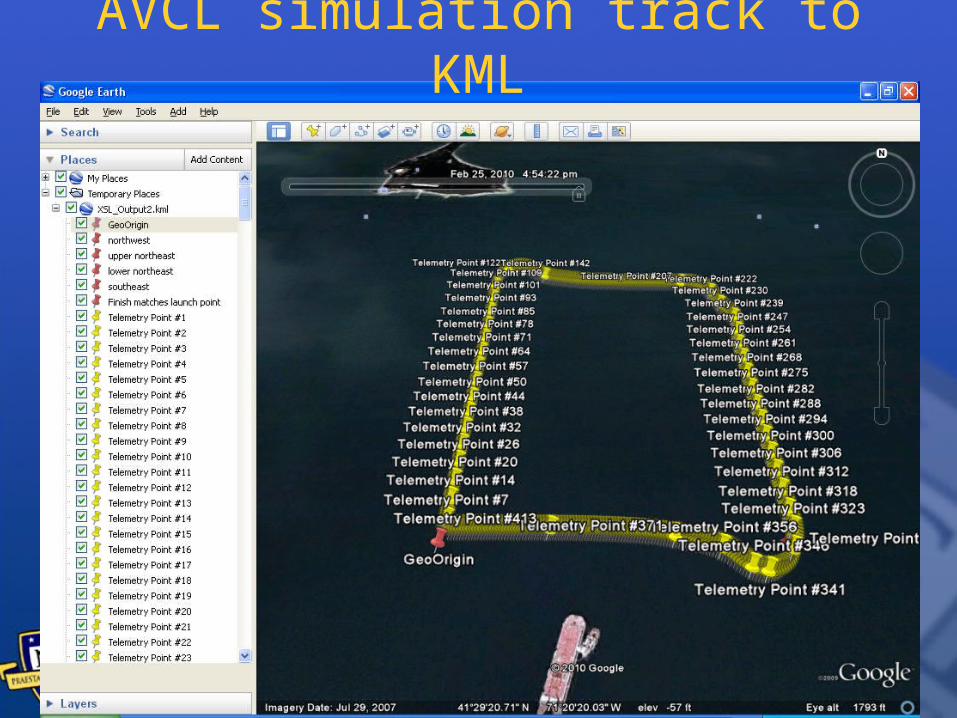
AVCL simulation track to KML
Extensible 3D (X3D) Graphics
ISO Standard, developed by working-group members of non-profit Web3D Consortium
Broad range of 3D graphics, multiple codebases
Patterned after HTML and Web Architecture• Evolved Virtual Reality Modeling Language
(VRML)• XML, ClassicVRML, compressed binary
encodings
Archival publishing of 3D models• Geometry, interaction, navigation, DIS
networking• Many many resources, exemplars, archives,
etc.
AUV WORKBENCHWORK IN PROGRESS
Slow but steady progress
AUV Workbench efforts in progress
AUV Workbench• Mission metadata and mission reports• Restructured threading for performance,
debugging• Testing AVCL support: AllCommandsUuv.xml
etc.• Joystick input: ROV or human-substitute
control
Xj3D visualization improvements• Rendering support for 64-bit architectures• Group merging multiple builds into common
trunk
Nightly builds and releases
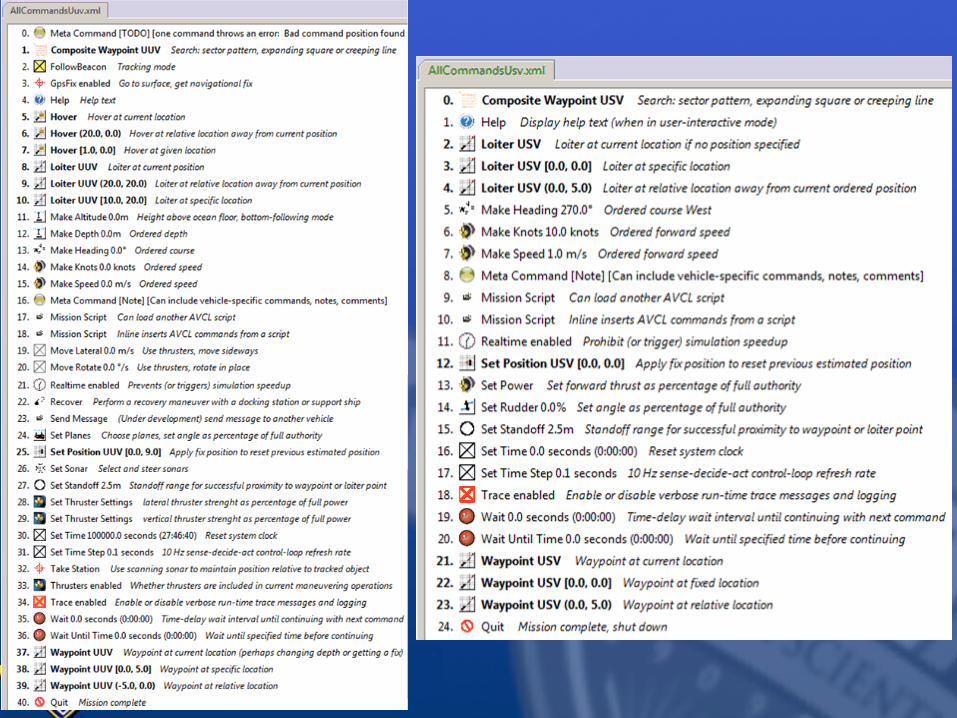
AllCommandsUuv.xml
List and test every AVCL command• Simple testing of workbench software• Confirms interface and validation• Not necessarily a runnable mission• Considering adding “dead reckoning” to 2D
plot• Mission unit tests for comprehensive
coverage likely to follow
Also for other robotics platforms• AllCommandsUsv.xml AllCommandsUav.xml
AllCommandsUgv.xml

Joystick input
Motivation• Rehearse ROV missions, especially for high-
school student experiments and competitions
• Provide alternate control input when rehearsing complex UUV missions
• Make AUV Workbench suitable for classroom or poolside use
Software• Java jinput project handles different devices
and operating systems satisfactorily
Thoughts on autonomous ethics
Everything old is new again• Largely unexplored or unconsidered
territory?• Significant history of experience: mine
warfare?
Assume success… then what?• Even if perfectly executable, proper robot
logic is not useful unless it is a directly extension of warfighter logic
• Rules of Engagement, Concepts of Operations, Doctrine, Tactics, etc. must be expressible in equivalent terms in order to be effective, usable
Multi-layer robot architectures
3 common layers defined in Rational Behavior Model (RBM) robot architecture• Strategic: planning, goal evaluation,
strategy• Tactical: navigation, operations, mission
conduct• Execution: low-level control of systems
Autonomous Vehicle Command Language (AVCL) mappable to many robot dialects
Possible fourth layer: Rules of Engagement?• provide ethical constraints on robot
strategies
AUTONOMOUS VEHICLE COMMAND LANGUAGE (AVCL)
XML vocabulary for robot mission specification, conduct and replay
Problem: Mission Incompatibility for Dissimilar Autonomous Vehicles
(AVs)
Vehicle-specific data formats and mission planning systems preclude effective coordination in multi-vehicle systems and hinder the design of such systems.
To date, the preponderance of multi-vehicle research has assumed inherent compatibility: homogeneous vehicle systems or explicitly programmed compatibility.
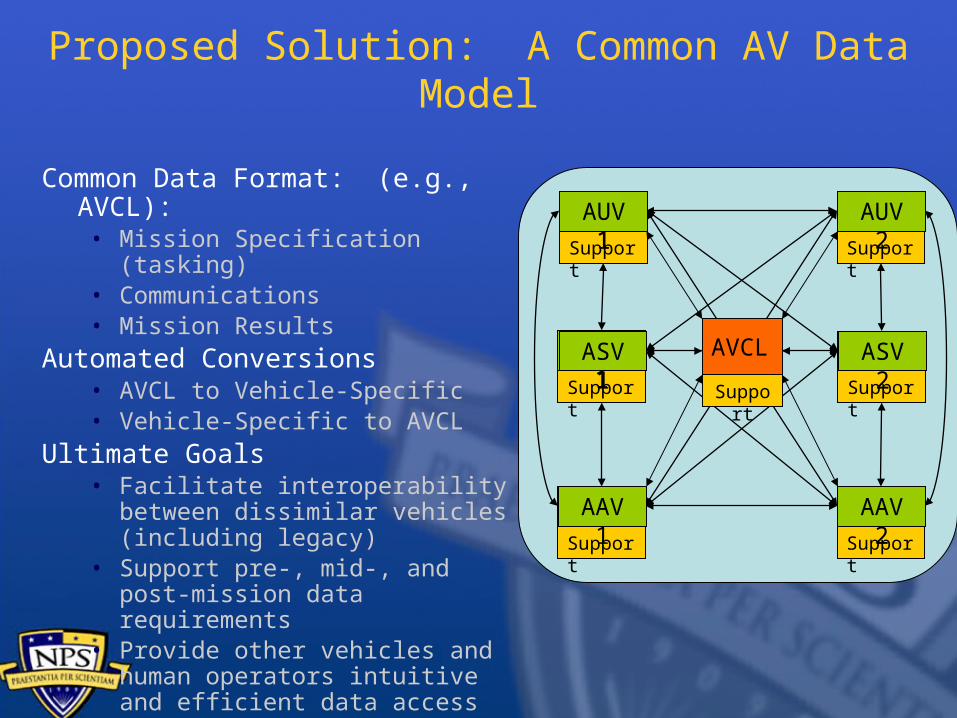
Proposed Solution: A Common AV Data Model
Common Data Format: (e.g., AVCL):• Mission Specification (tasking)• Communications• Mission Results
Automated Conversions• AVCL to Vehicle-Specific• Vehicle-Specific to AVCL
Ultimate Goals• Facilitate interoperability
between dissimilar vehicles (including legacy)
• Support pre-, mid-, and post-mission data requirements
• Provide other vehicles and human operators intuitive and efficient data access
AUV 2
ASV 2
AAV 2
AAV 1 Suppor
t
Support
Support
Support
Support
Support
ASV 1
AUV 1
AVCL
AAV 1
Support
AUV 2
ASV 2
AAV 2
AUV 1
ASV 1
AVCL Description
Autonomous Vehicle Control Language (AVCL) is a command and control language for autonomous unmanned vehicles, enabling common XML-based representations for mission scripts, agenda plans and post-mission recorded telemetry. Operators can utilize a single archivable and validatable format for robot tasking and results that is directly convertible to and from a wide variety of different robot command languages.
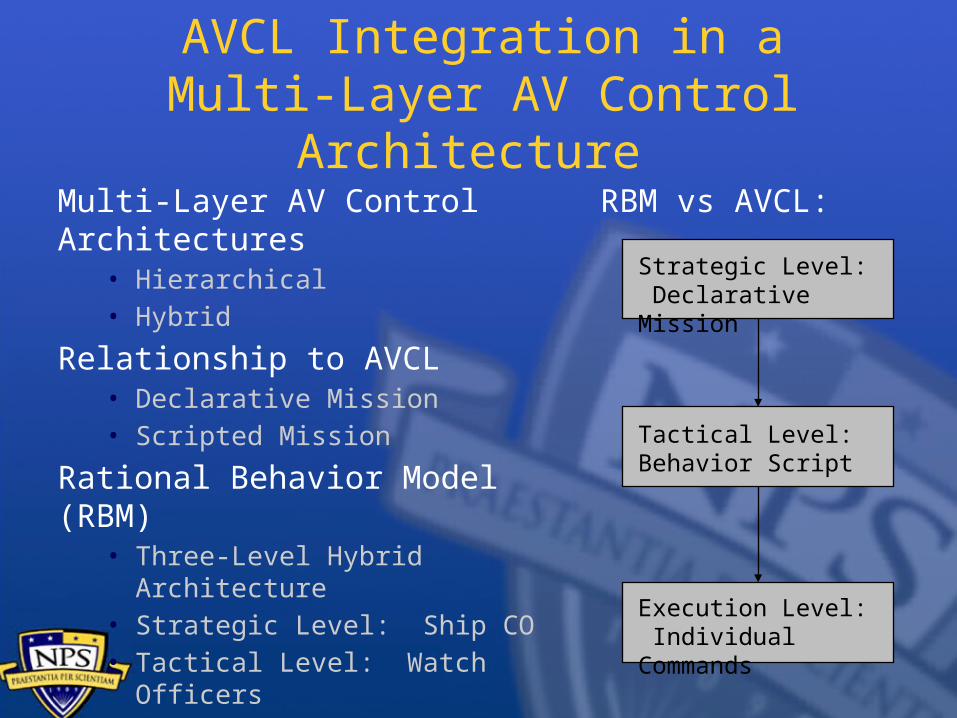
AVCL Integration in a Multi-Layer AV Control Architecture
Multi-Layer AV Control Architectures
• Hierarchical• Hybrid
Relationship to AVCL• Declarative Mission• Scripted Mission
Rational Behavior Model (RBM)• Three-Level Hybrid Architecture• Strategic Level: Ship CO• Tactical Level: Watch Officers• Execution Level: Watch Standers
RBM vs AVCL:
Strategic Level: Declarative Mission
Tactical Level: Behavior Script
Execution Level: Individual Commands
AVCL and Related Technologies
Exemplar Data Model Definition: AVCL• Task-Level Behavior Set Determination• XML Schema Design• Correlated information:
• Mission Specification (goals, constraints, tasking)• Mission Results (telemetry)• Communications (message set)
Data Conversions• AVCL translation to Vehicle-Specific languages• Vehicle-Specific language translations to AVCL• AVCL Declarative output as AVCL Task-Level
commands• AVCL Task-Level status responses to AVCL
Declarative
Data Model Use to Facilitate AV Control• Integration into a Multi-Layer Architecture
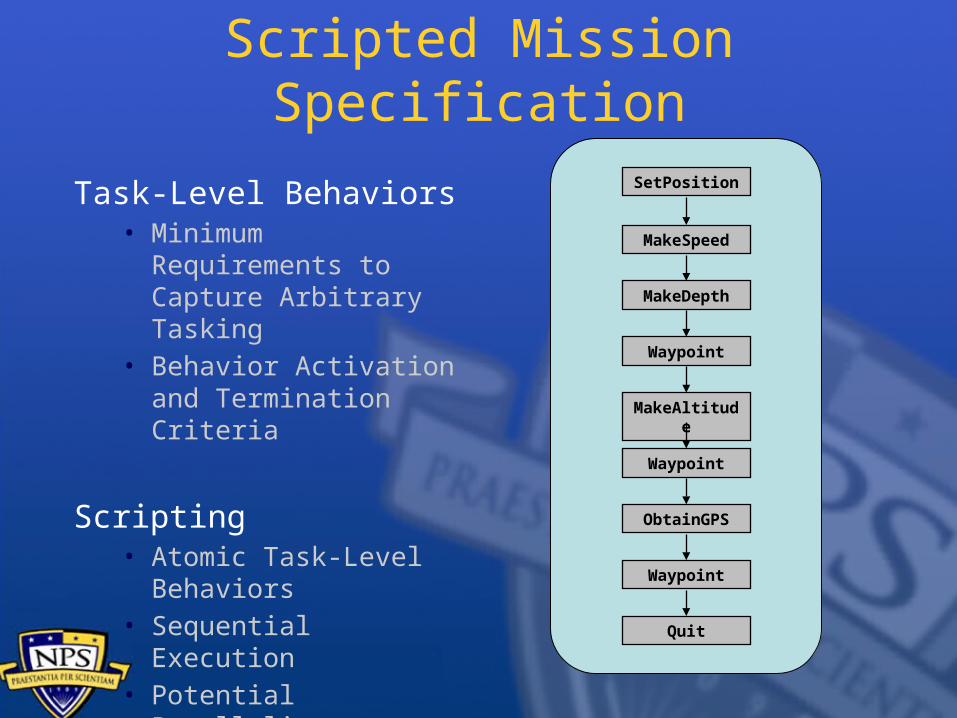
Scripted Mission Specification
Task-Level Behaviors• Minimum Requirements
to Capture Arbitrary Tasking
• Behavior Activation and Termination Criteria
Scripting• Atomic Task-Level
Behaviors• Sequential Execution• Potential Parallelism
MakeSpeed
MakeDepth
Waypoint
MakeAltitude
Waypoint
ObtainGPS
SetPosition
Waypoint
Quit
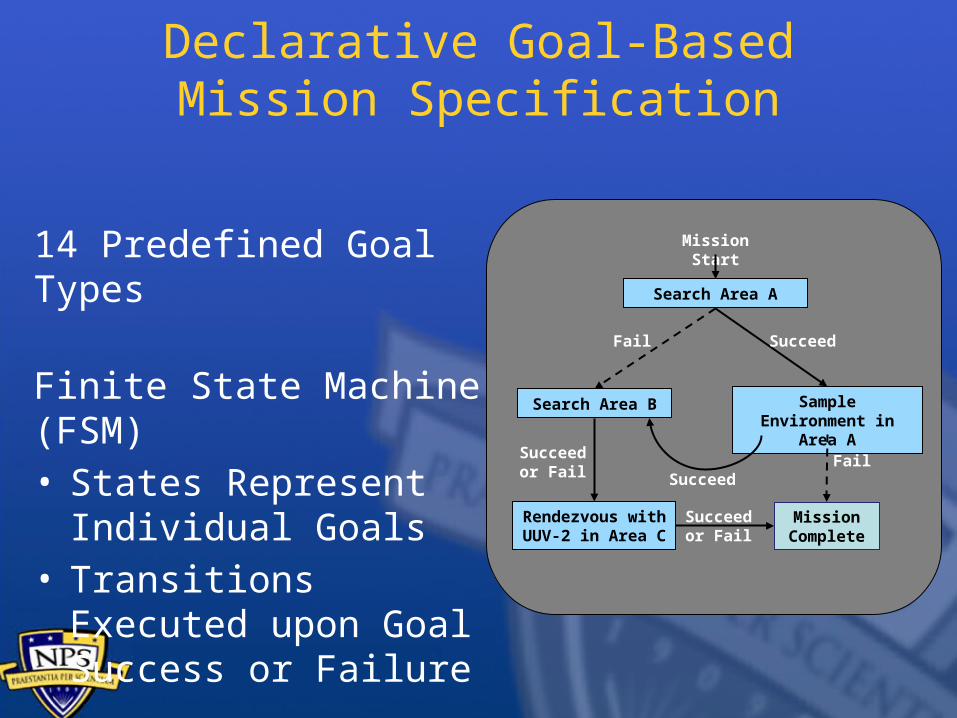
Declarative Goal-Based Mission Specification
14 Predefined Goal Types
Finite State Machine (FSM)• States Represent
Individual Goals• Transitions Executed
upon Goal Success or Failure
Mission Start
Rendezvous with UUV-2 in
Area C
Search Area A
Search Area B Sample Environment in
Area A
Mission Complete
SucceedFail
SucceedFailSuccee
d or Fail
Succeed or Fail
AVCL TRANSLATIONS AND PARSER PRODUCTION
Theory and Practice
External C2 Systems
AVCL
Mission Goals and Constraints
Task Level Commands
Vehicle-Specific Languages
PlannerRules & Templates
XSLT and Vehicle-Specific XML
C2IEDM Business Objects
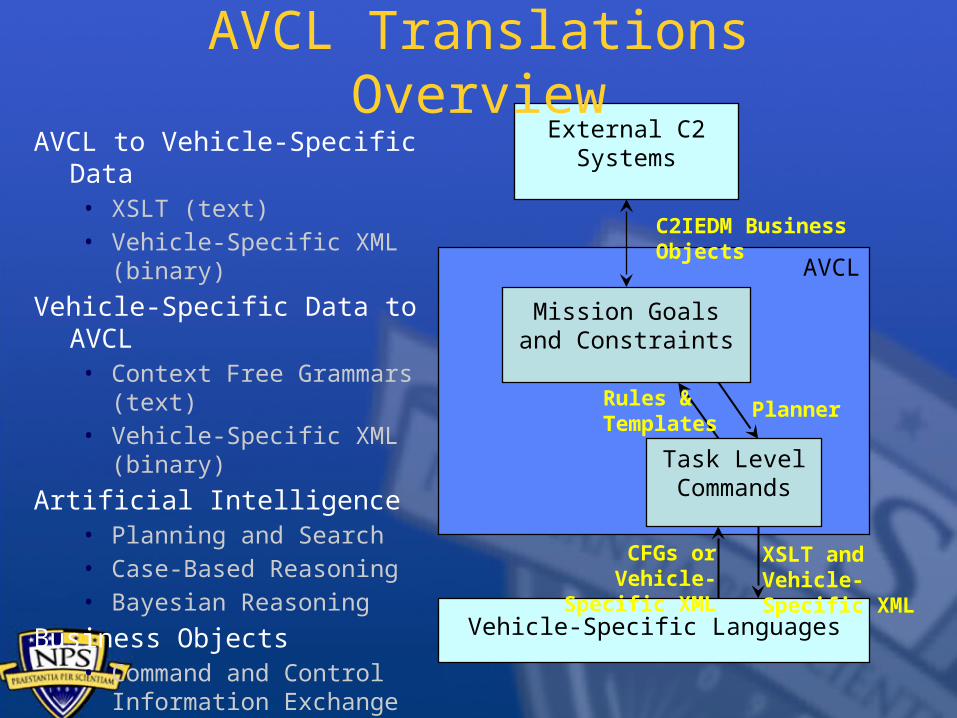
AVCL Translations OverviewAVCL to Vehicle-Specific Data
• XSLT (text)• Vehicle-Specific XML
(binary)
Vehicle-Specific Data to AVCL• Context Free Grammars
(text)• Vehicle-Specific XML
(binary)
Artificial Intelligence• Planning and Search• Case-Based Reasoning• Bayesian Reasoning
Business Objects• Command and Control
Information Exchange Data Model (C2IEDM)
• AVCL Declarative Tasking
CFGs or Vehicle-Specific XML
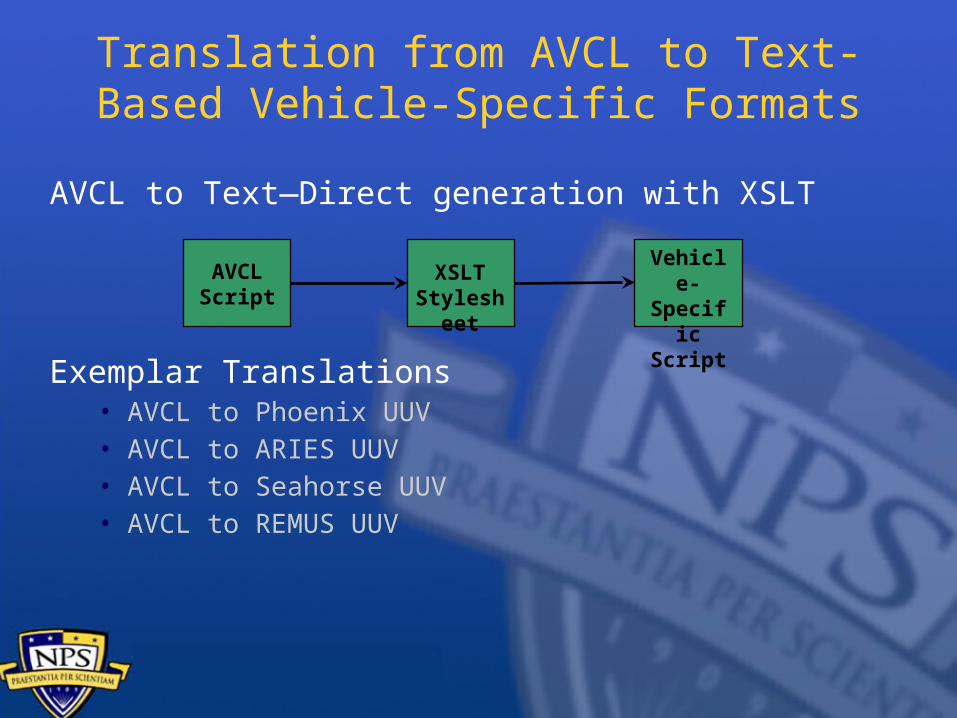
AVCL to Text—Direct generation with XSLT
Exemplar Translations• AVCL to Phoenix UUV• AVCL to ARIES UUV• AVCL to Seahorse UUV• AVCL to REMUS UUV
XSLT Stylesheet
Vehicle-Specific Script
AVCL Script
Translation from AVCL to Text-Based Vehicle-Specific Formats
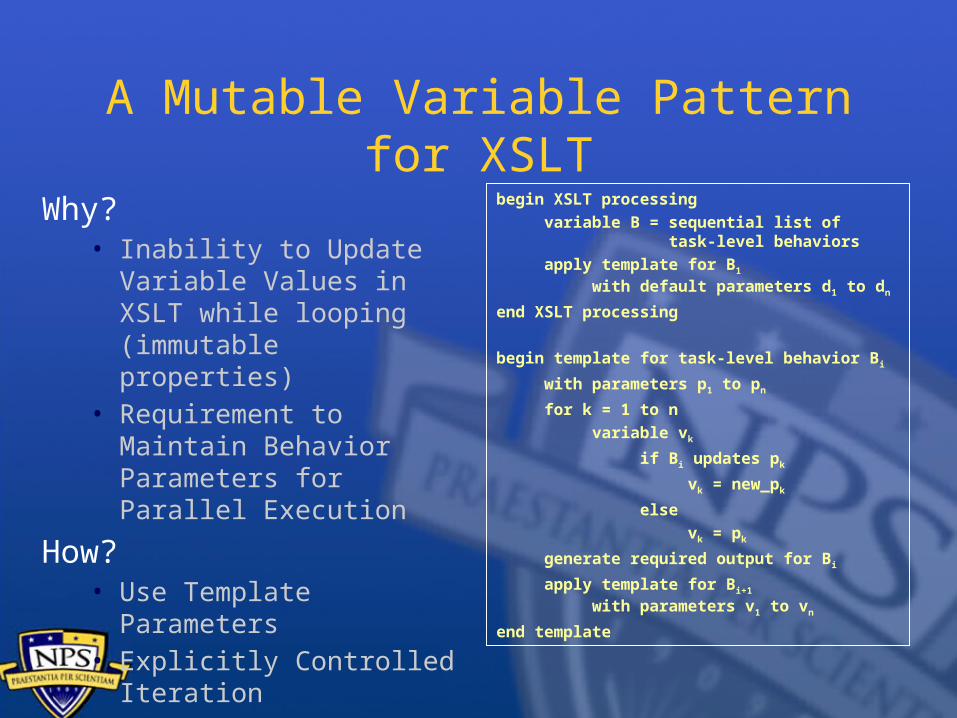
A Mutable Variable Pattern for XSLT
Why?• Inability to Update
Variable Values in XSLT while looping (immutable properties)
• Requirement to Maintain Behavior Parameters for Parallel Execution
How?• Use Template Parameters• Explicitly Controlled
Iteration
begin XSLT processing
variable B = sequential list of task-level behaviors
apply template for B1 with default parameters d1 to dn
end XSLT processing
begin template for task-level behavior Bi
with parameters p1 to pn
for k = 1 to n
variable vk
if Bi updates pk
vk = new_pk
else
vk = pk
generate required output for Bi
apply template for Bi+1 with parameters v1 to vn
end template
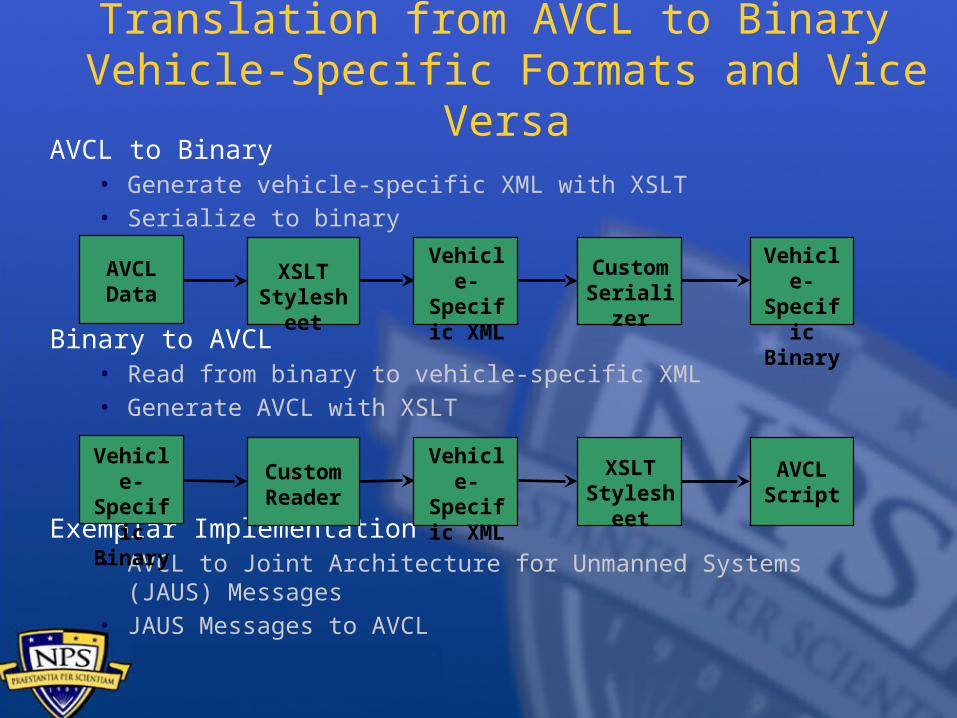
AVCL to Binary• Generate vehicle-specific XML with XSLT• Serialize to binary
Binary to AVCL• Read from binary to vehicle-specific XML• Generate AVCL with XSLT
Exemplar Implementation• AVCL to Joint Architecture for Unmanned Systems (JAUS)
Messages• JAUS Messages to AVCL
Vehicle-Specific Binary
Custom Serializer
AVCL Data
XSLT Stylesheet
Translation from AVCL to Binary Vehicle-Specific Formats and Vice Versa
Vehicle-Specific XML
AVCL Script
XSLT Stylesheet
Vehicle-Specific Binary
Custom Reader
Vehicle-Specific XML
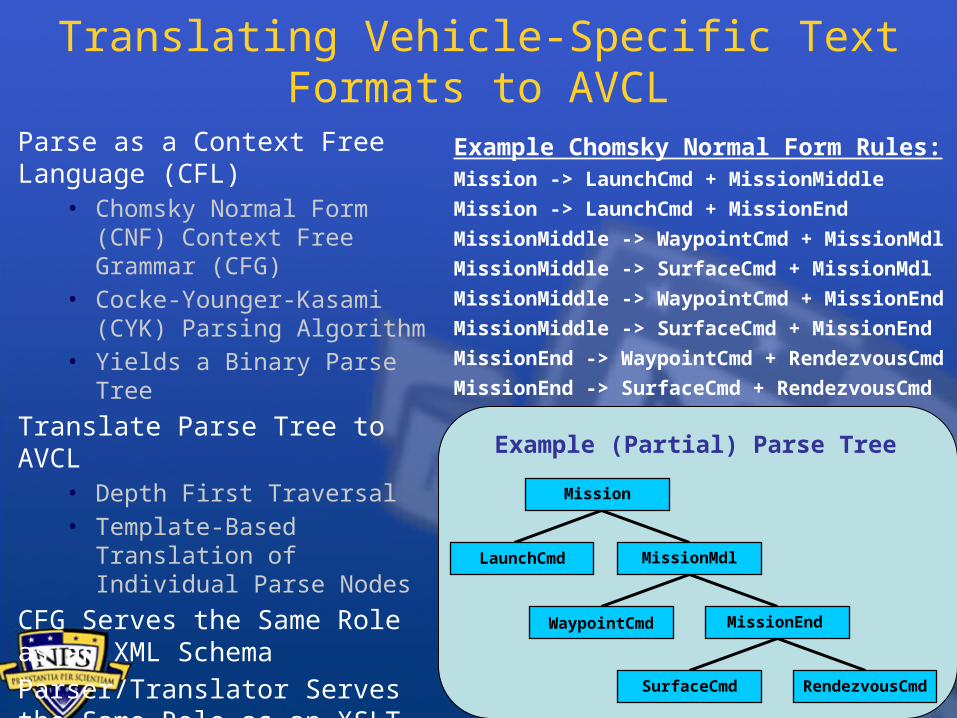
Translating Vehicle-Specific Text Formats to AVCL
Parse as a Context Free Language (CFL)
• Chomsky Normal Form (CNF) Context Free Grammar (CFG)
• Cocke-Younger-Kasami (CYK) Parsing Algorithm
• Yields a Binary Parse Tree
Translate Parse Tree to AVCL• Depth First Traversal• Template-Based Translation
of Individual Parse Nodes
CFG Serves the Same Role as an XML SchemaParser/Translator Serves the Same Role as an XSLT Stylesheet
Example Chomsky Normal Form Rules:Mission -> LaunchCmd + MissionMiddle
Mission -> LaunchCmd + MissionEnd
MissionMiddle -> WaypointCmd + MissionMdl
MissionMiddle -> SurfaceCmd + MissionMdl
MissionMiddle -> WaypointCmd + MissionEnd
MissionMiddle -> SurfaceCmd + MissionEnd
MissionEnd -> WaypointCmd + RendezvousCmd
MissionEnd -> SurfaceCmd + RendezvousCmd
Example (Partial) Parse Tree
Mission
LaunchCmd MissionMdl
WaypointCmd MissionEnd
RendezvousCmdSurfaceCmd
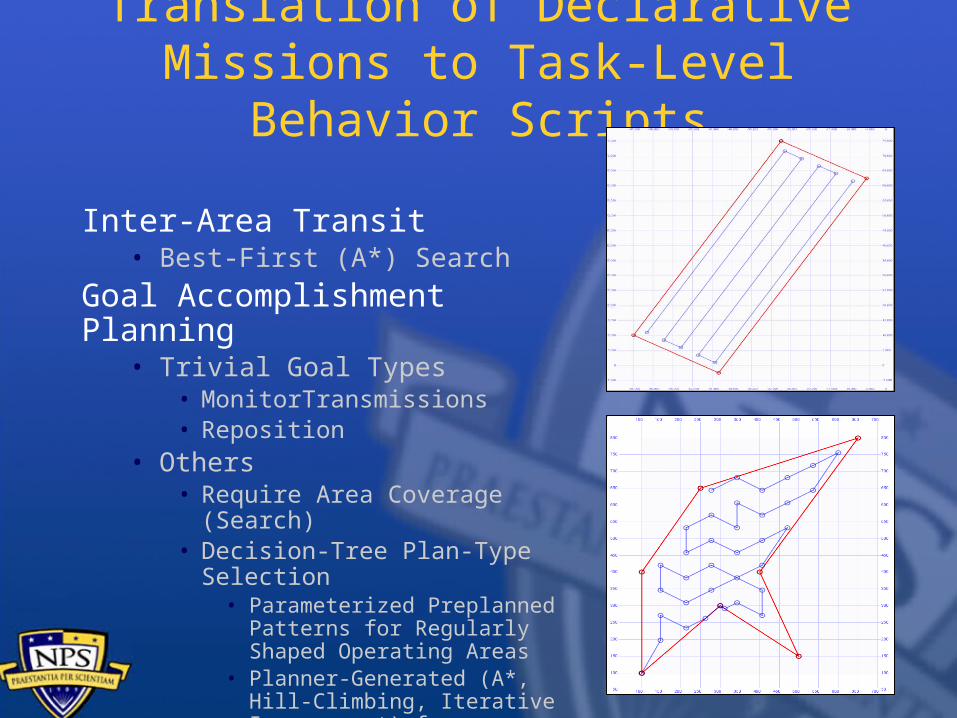
Translation of Declarative Missions to Task-Level Behavior
Scripts
Inter-Area Transit• Best-First (A*) Search
Goal Accomplishment Planning
• Trivial Goal Types• MonitorTransmissions• Reposition
• Others• Require Area Coverage
(Search)• Decision-Tree Plan-Type
Selection• Parameterized Preplanned
Patterns for Regularly Shaped Operating Areas
• Planner-Generated (A*, Hill-Climbing, Iterative Improvement) for Irregularly Shaped Areas
TODO wish list for AVCL v2.1
AVCL schema needs to be simplified• Remove vehicle-specific duplicate
definitions• Possibly streamline inner abstract types• Blocker: all changes reflected in JAXB API,
so XML changes provoke corresponding AUVW changes
Multi-vehicle message passing, coordination
Graduate improvements using MetaCommand• Joystick
Publish JAXB library as independent API
References
AUV Workbench• https://savage.nps.edu/AuvWorkbench
AVCL page (with schema, DTD, documentation)• https://savage.nps.edu/Savage/AuvWorkbench/
AVCL/AVCL.html
Duane Davis Dissertation• Design, Implementation and Testing of a Com
mon Data Model Supporting Autonomous Vehicle Compatibility and Interoperability
Collaboration is welcome
Naval Postgraduate School (NPS) is .mil, .edu university driven by research and education• Happy to offer our resources for your use• Happy to write proposals together to fund
work
Coming soon: 4 online courses as distance-learning certificate• X3D graphics I and II, Simulation
Networking, Networked Virtual Environments (NVE)
Please tell us what you think. Thanks!

Don Brutzman, [email protected]
[email protected] http://faculty.nps.edu/brutzman
Code USW/Br, Naval Postgraduate SchoolMonterey California 93943-5000 USA
1.831.656.2149 work1.831.402.4809 cell
Contact
Duane Davis, CDR USN, [email protected]
Code CS/Dv, Naval Postgraduate SchoolMonterey California 93943-5000 USA
1.831.656.7980 work
Contact