Embed Size (px)
Citation preview
VISOKA TEHNIČKA ŠKOLA U BJELOVARUSTRUČNI STUDIJ MEHATRONIKE
Automatsko upravljanje
Zoran Vrhovski, mag.ing.eit.
Bjelovar, ožujak 2011.

ii
Sadržaj
Popis slika v
1 Uvod 1
2 Osnovni pojmovi 52.1 Dinamički sustavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Klasifikacija sustava . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.1 Linearni i nelinearni sustavi . . . . . . . . . . . . . . . . . . . . 92.2.2 Vremenski nepromjenjivi i vremenski promjenjivi sustavi . . . . 122.2.3 Kontinuirani i diskretni sustavi . . . . . . . . . . . . . . . . . . 132.2.4 Deterministički, nedeterministički i stohastički sustavi . . . . . . 142.2.5 Sustavi s koncentriranim parametrima i sustavi s raspodjeljenim
parametrima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2.6 Sustavi s jednim ulazom i jednim izlazom (SISO) i sustavi s više
ulaza i više izlaza (MIMO) . . . . . . . . . . . . . . . . . . . . . 172.2.7 Sustavi s memorijom i sustavi bez memorije . . . . . . . . . . . 182.2.8 Kauzalni i nekauzalni sustavi . . . . . . . . . . . . . . . . . . . 19
3 Matematički modeli kontinuiranih sustava 233.1 Opis sustava diferencijalnim jednadžbama . . . . . . . . . . . . . . . . 243.2 Opis sustava prijenosnom funkcijom u Laplaceovoj domeni . . . . . . . 31
3.2.1 Laplaceova transformacija . . . . . . . . . . . . . . . . . . . . . 313.2.2 Inverzna laplaceova transformacija . . . . . . . . . . . . . . . . 34
3.3 Opis sustava varijablama stanja . . . . . . . . . . . . . . . . . . . . . . 41
4 Vremenski odziv osnovnih dinamičkih članova 454.1 Odziv sustava s obzirom na položaj polova . . . . . . . . . . . . . . . . 454.2 Proporcionalni član nultog reda (P0 član) . . . . . . . . . . . . . . . . . 474.3 Proporcionalni član prvog reda (PT1 član) . . . . . . . . . . . . . . . . 494.4 Proporcionalni član drugog reda (PT2 član) . . . . . . . . . . . . . . . 514.5 Proporcionalni član drugog reda s prigušenim oscilatornim ponašanjem
(PT2S član) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
iv SADRŽAJ
4.6 Derivacijski član (D član) . . . . . . . . . . . . . . . . . . . . . . . . . . 584.6.1 Realni derivacijski član (DT1 član) . . . . . . . . . . . . . . . . 59
4.7 Integralni član . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.8 Član s transportnim kašnjenjem . . . . . . . . . . . . . . . . . . . . . . 62
5 Frekvencijski odziv osnovnih dinamičkih članova 655.1 Nyquistov dijagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.2 Bodeov dijagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.3 Frekvencijski odziv proporcionalnog člana nultog reda (P0 član) . . . . 79
5.3.1 Nyquistov dijagram P0 člana . . . . . . . . . . . . . . . . . . . 795.3.2 Bodeov dijagram P0 člana . . . . . . . . . . . . . . . . . . . . . 79
5.4 Frekvencijski odziv proporcionalnog člana prvog reda (PT1 član) . . . . 805.4.1 Nyquistov dijagram PT1 člana . . . . . . . . . . . . . . . . . . . 805.4.2 Bodeov dijagram PT1 člana . . . . . . . . . . . . . . . . . . . . 81
5.5 Frekvencijski odziv proporcionalnog člana drugog reda (PT2 član) . . . 825.5.1 Nyquistov dijagram PT2 člana . . . . . . . . . . . . . . . . . . . 825.5.2 Bodeov dijagram PT2 člana . . . . . . . . . . . . . . . . . . . . 83
5.6 Frekvencijski odziv proporcionalnog člana drugog reda s prigušenim os-cilatornim ponašanjem (PT2S član) . . . . . . . . . . . . . . . . . . . . 855.6.1 Nyquistov dijagram PT2S člana . . . . . . . . . . . . . . . . . . 855.6.2 Bodeov dijagram PT2S člana . . . . . . . . . . . . . . . . . . . 87
5.7 Frekvencijski odziv derivacijskog člana (D član) . . . . . . . . . . . . . 905.7.1 Nyquistov dijagram D člana . . . . . . . . . . . . . . . . . . . . 915.7.2 Nyquistov dijagram DT1 člana . . . . . . . . . . . . . . . . . . 915.7.3 Bodeov dijagram D člana . . . . . . . . . . . . . . . . . . . . . 925.7.4 Bodeov dijagram DT1 člana . . . . . . . . . . . . . . . . . . . . 92
5.8 Frekvencijski odziv integralnog člana (I član) . . . . . . . . . . . . . . . 935.8.1 Nyquistov dijagram I člana . . . . . . . . . . . . . . . . . . . . . 935.8.2 Bodeov dijagram I člana . . . . . . . . . . . . . . . . . . . . . . 94
5.9 Frekvencijski odziv člana s transportnim kašnjajnem . . . . . . . . . . . 955.9.1 Nyquistov dijagram člana s transportnim kašnjajnem . . . . . . 955.9.2 Bodeov dijagram člana s transportnim kašnjajnem . . . . . . . . 95
6 Algebra blokova u sustavu automatskog upravljanja 976.1 Blok dijagrami . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 976.2 Algebra blokova . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
6.2.1 Serijsko povezivanje blokova . . . . . . . . . . . . . . . . . . . . 986.2.2 Paralelno povezivanje blokova . . . . . . . . . . . . . . . . . . . 996.2.3 Povratna veza . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1006.2.4 Provlačenje sumacijske točke kroz blok . . . . . . . . . . . . . . 101

SADRŽAJ v
6.2.5 Provlačenje točke odvajanje kroz blok . . . . . . . . . . . . . . . 1026.2.6 Primjena algebre blokova na primjerima sustava automatskog up-
ravljanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
7 DODATAK 1077.1 Laplaceova transformacija . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.1.1 Tablica Laplaceove transformacije . . . . . . . . . . . . . . . . . 1097.2 Z transformacija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
7.2.1 Tablica Z transformacija . . . . . . . . . . . . . . . . . . . . . . 1137.2.2 Tablica Laplaceove i Z transformacija (parovi) . . . . . . . . . . 114
7.3 Primjena Matlab&SIMULINK-a u analizi sustava automatskog upravl-janja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1157.3.1 Realizacija pojedinog matematičkog opisa sustava uMatlab SIMULINK
- u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Bibliografija 122
Indeks 125

vi SADRŽAJ
Popis slika
2.1 Sustav kao događaj koji izaziva promijenu stanja . . . . . . . . . . . . . 62.2 Primjer tehničkog sustava (automobilska industrija [2]) . . . . . . . . . 62.3 Primjer tehničkog sustava (punionica pive [3]) . . . . . . . . . . . . . . 62.4 Primjer tehničkog sustava (valjaonica lima [4]) . . . . . . . . . . . . . . 72.5 Primjer biološkog sustava (struktura tipičnog neurona [5]) . . . . . . . 72.6 Primjer informacijskog sustava [6] . . . . . . . . . . . . . . . . . . . . . 82.7 Primjer linearnog odziva sustava . . . . . . . . . . . . . . . . . . . . . . 102.8 Primjer nelinearnog odziva sustava . . . . . . . . . . . . . . . . . . . . 112.9 Sustava skladištenja tekućine . . . . . . . . . . . . . . . . . . . . . . . 112.10 Sustav s vremenski nepromjenjivim parametrima (RLC krug) . . . . . . 122.11 Sustav s vremenski promjenjivim parametrima (m(t) je promjeniv . . . 122.12 Odziv sustava s nepromjenjivim i promjenivim parametrima . . . . . . 132.13 Odziv kontinuiranog i diskretnog regulatora . . . . . . . . . . . . . . . 142.14 Generator slučajnih brojeva . . . . . . . . . . . . . . . . . . . . . . . . 152.15 Zavojnica s koncentriranim parametrom L (induktivitet) . . . . . . . . 162.16 Zavojnica s raspodijeljenim parametrima L i RL . . . . . . . . . . . . . 162.17 Sustav s jednim ulazom i jednim izlazom . . . . . . . . . . . . . . . . . 172.18 Električni krug s idealnim operacijskim pojačalom . . . . . . . . . . . . 172.19 Sustav s više ulaza i više izlaza . . . . . . . . . . . . . . . . . . . . . . 172.20 Balon tipa Zeppelin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.21 Sustav miješanja dviju tekućina . . . . . . . . . . . . . . . . . . . . . . 182.22 Odziv sustava s memorijom (sustav mijesanja tekućina) . . . . . . . . . 192.23 Otpornički električni krug . . . . . . . . . . . . . . . . . . . . . . . . . 192.24 Odziv sustava bez memorijom (otpornik 8 Ω) . . . . . . . . . . . . . . 202.25 Kauzalni sustav - RC filtar . . . . . . . . . . . . . . . . . . . . . . . . . 202.26 Odziv kauzalnog sustava (RC filtar) . . . . . . . . . . . . . . . . . . . . 202.27 Odziv nekauzalnog sustava . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1 Vremenske pobude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 RC filtar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 RLC krug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
viii POPIS SLIKA
3.4 Rotacijski sustav . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.5 Torzija vratila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.6 Shematski prikaz riješenja diferencijalne jednadžbe . . . . . . . . . . . 313.7 Odziv RC filtra na skokovitu pobudu . . . . . . . . . . . . . . . . . . . 383.8 RC filtar: vremenska i Laplaceova domena . . . . . . . . . . . . . . . . 383.9 Odziv RLC kruga na skokovitu pobudu . . . . . . . . . . . . . . . . . . 403.10 RLC krug: vremenska i Laplaceova domena . . . . . . . . . . . . . . . 403.11 Opis sustava varijablama stanja . . . . . . . . . . . . . . . . . . . . . . 413.12 Varijable u prostoru stanja (RLC krug) . . . . . . . . . . . . . . . . . . 44
4.1 Polovi u s - ravnini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.2 Aperiodski odziv sustava . . . . . . . . . . . . . . . . . . . . . . . . . . 464.3 Oscilatorni odziv sustava . . . . . . . . . . . . . . . . . . . . . . . . . . 474.4 Prigušeni i raspirujući oscilatorni odziv sustava . . . . . . . . . . . . . 474.5 Praktični primjeri P0 članova . . . . . . . . . . . . . . . . . . . . . . . 484.6 Prijelazna funkcija P0 člana s pojačanjem km = 2.12 . . . . . . . . . . 484.7 Praktični primjeri PT1 članova . . . . . . . . . . . . . . . . . . . . . . 494.8 Težinska funkcija, prijelazna funkcija i odziv na rampu PT1 člana . . . 504.9 Praktični primjeri PT2 članova . . . . . . . . . . . . . . . . . . . . . . 524.10 Težinska funkcija, prijelazna funkcija i odziv na rampu PT2 člana . . . 524.11 Praktični primjeri PT2S članova . . . . . . . . . . . . . . . . . . . . . . 544.12 Težinska funkcija, prijelazna funkcija i odziv na rampu PT2S člana . . 554.13 Pokazatelji kvalitete . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.14 Težinska funkcija, prijelazna funkcija i odziv na rampu PT2S člana s
neprigušenim oscilacijama . . . . . . . . . . . . . . . . . . . . . . . . . 574.15 Praktični primjeri D članova . . . . . . . . . . . . . . . . . . . . . . . . 584.16 Prijelazna funkcija i odziv na rampu D člana . . . . . . . . . . . . . . . 594.17 Praktični primjeri realnih derivatora (DT1 članovi) . . . . . . . . . . . 604.18 Težinska funkcija, prijelazna funkcija i odziv na rampu DT1 člana . . . 604.19 Praktični primjeri I članova . . . . . . . . . . . . . . . . . . . . . . . . 614.20 Težinska funkcija, prijelazna funkcija i odziv na rampu I člana . . . . . 624.21 Praktični primjer člana s transportnim kašnjenjem . . . . . . . . . . . . 634.22 Težinska funkcija, prijelazna funkcija i odziv na rampu člana s trans-
portnim kašnjenjem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1 Izlazni signal sustava G(s) uz neprigušenu oscilatornu pobudu . . . . . 675.2 Odziv y(t) sustava G(s) na pobudu u(t), (izraz (5.17)) . . . . . . . . . 695.3 Nyquistov dijagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.4 Nyquistov dijagram sustava (5.24) . . . . . . . . . . . . . . . . . . . . . 725.5 Amplitudno frekvencijska karakteristika (stvarna i aproksimirana pravcima) 75
POPIS SLIKA ix
5.6 Fazno frekvencijska karakteristika (stvarna i aproksimirana pravcima) . 765.7 Amplitudna i fazna frekvencijska karakteristika (A1(ω),ϕ1(ω)) . . . . . 775.8 Amplitudna i fazna frekvencijska karakteristika (A1(ω) i A2(ω),ϕ1(ω) i
ϕ2(ω)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.9 Amplitudna i fazna frekvencijska karakteristika (A1(ω), A2(ω) iA3(ω),ϕ1(ω),
ϕ2(ω) i ϕ2(ω)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.10 Amplitudna i fazna frekvencijska karakteristika (A1(ω)+A2(ω)+A3(ω),
ϕ1(ω)+ϕ2(ω)+ϕ2(ω)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.11 Nyquistov dijagram P0 člana . . . . . . . . . . . . . . . . . . . . . . . . 795.12 Bodeov dijagram P0 člana (aproksimacija pravcima) . . . . . . . . . . . 805.13 Nyquistov dijagram PT1 člana . . . . . . . . . . . . . . . . . . . . . . . 815.14 Bodeov dijagram PT1 člana (aproksimacija pravcima) . . . . . . . . . . 815.15 Bodeov dijagram PT1 člana . . . . . . . . . . . . . . . . . . . . . . . . 825.16 Nyquistov dijagram PT2 člana . . . . . . . . . . . . . . . . . . . . . . . 835.17 Bodeov dijagram PT2 člana (aproksimacija pravcima) . . . . . . . . . . 845.18 Bodeov dijagram PT2 člana . . . . . . . . . . . . . . . . . . . . . . . . 855.19 Nyquistov dijagram PT2S člana . . . . . . . . . . . . . . . . . . . . . . 865.20 Bodeov dijagram PT2S člana (aproksimacija pravcima) . . . . . . . . . 895.21 Bodeov dijagram PT2S člana . . . . . . . . . . . . . . . . . . . . . . . 905.22 Nyquistov dijagram D člana . . . . . . . . . . . . . . . . . . . . . . . . 915.23 Nyquistov dijagram DT1 člana . . . . . . . . . . . . . . . . . . . . . . . 925.24 Bodeov dijagram D člana (aproksimacija pravcima) . . . . . . . . . . . 925.25 Bodeov dijagram DT1 člana (aproksimacija pravcima) . . . . . . . . . . 935.26 Nyquistov dijagram I člana . . . . . . . . . . . . . . . . . . . . . . . . . 945.27 Bodeov dijagram I člana (aproksimacija pravcima) . . . . . . . . . . . . 945.28 Nyquistov dijagram člana s transportnim kašnjajnem . . . . . . . . . . 955.29 Bodeov dijagram člana s transportnim kašnjajnem . . . . . . . . . . . . 96
6.1 Osnovni simboli u blok dijagramima . . . . . . . . . . . . . . . . . . . . 976.2 Serijski spoj blokova . . . . . . . . . . . . . . . . . . . . . . . . . . . . 986.3 Paralelni spoj blokova . . . . . . . . . . . . . . . . . . . . . . . . . . . 996.4 Povratna veza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1006.5 Otvoreni krug (serijski povezane prijenosne funkcije) . . . . . . . . . . 1006.6 Pretvorba zatvorenog sustava u sustav s jediničnom povratnom vezom . 1016.7 Provlačenje sumacijske točke desno kroz blok . . . . . . . . . . . . . . . 1026.8 Provlačenje sumacijske točke lijevo kroz blok . . . . . . . . . . . . . . . 1026.9 Provlačenje točke odvajanje desno kroz blok . . . . . . . . . . . . . . . 1026.10 Provlačenje točke odvajanje lijevo kroz blok . . . . . . . . . . . . . . . 1036.11 Sustav automatskog upravljanja (1) . . . . . . . . . . . . . . . . . . . . 1036.12 Sustav automatskog upravljanja (1) - blok algebra . . . . . . . . . . . . 104

x POPIS SLIKA
6.13 Sustav automatskog upravljanja (2) . . . . . . . . . . . . . . . . . . . . 1056.14 Sustav automatskog upravljanja (2) - blok algebra . . . . . . . . . . . . 106
7.1 Stvaranje prijenosnih funkcija: a) kontinuirani sustav, b) diskretni sustav 1157.2 Težinska i prijelazna funkcija sustava . . . . . . . . . . . . . . . . . . . 1157.3 Pokazatelji kvalitete prijelazne funkcije sustava . . . . . . . . . . . . . . 1167.4 Nule i polovi sustava . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1167.5 Nyquistov dijagram sustava . . . . . . . . . . . . . . . . . . . . . . . . 1177.6 Bodeov dijagram sustava . . . . . . . . . . . . . . . . . . . . . . . . . . 1177.7 Bodeov dijagram sustava (Amplitudno i fazno osiguranje) . . . . . . . . 1187.8 Routhov kriterij stabilnosti . . . . . . . . . . . . . . . . . . . . . . . . . 1187.9 Diskretizacija sustava . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1197.10 Diskretne težinske i prijelazne funkcije . . . . . . . . . . . . . . . . . . 1197.11 Realizacija diferencijalne jednadžbe u Matlab SIMULINK - u . . . . . . 1207.12 Realizacija prijenosne funkcije u Matlab SIMULINK - u . . . . . . . . 1207.13 Realizacij sustava u opisu varijablama stanja u Matlab SIMULINK - u 1217.14 Pretvorba prijenosne funkcije u prostor stanja . . . . . . . . . . . . . . 121
Poglavlje 1
Uvod
Automatsko upravljanje je područje znanosti koje se bavi upravljanjem suvremenihtehnoloških sustava. Ovo područje znanosti zahtijeva dobro poznavanje matematike,signala i sustava, fizike i drugih tehničkih nauka. Sustavi automatskog upravljanjasu tehnički dinamički sustavi koji bez prisustva čovjeka (tehnologa) realiziraju željenuradnju (npr. dovođenje alata robota iz jedne točke u neku drugu točku, upravljanjebrzinom vrtnje elektromotora, regulacije temperature prostorije i dr.). Poboljšanjekvalitete proizvoda, smanjenje utroška energije, smanjenje emisije štetnih plinova,povećanje sigurnosti i slično samo su neke od prednosti koje donosi upravljanje sus-tavima.
Osnovni razlozi za uvođenje automatizacije općenito je gospodarske prirode, aliisto tako, mnogi procesi previše su brzi ili složeni da bi ih čovjek mogao pratiti svojimosjetilima i istovremeno upravljati s njima. Mnogi su sustavi opasni po život, stogaje automatizacija takvih postrojenja i više nego potrebna kako se ne bi narušio život izdravlje radnika.
Knjiga koju čitate na jednostavan način opisuje osnove automatskog upravljanja.Pri tome se koristi poprilično jak matematički aparat, ali do u detalje objašnjen na jed-nostavnim primjerima iz svijeta sustava upravljanja. U ovom prvom uvodnom poglavljuproći ćemo ukratko kroz sva poglavlja ove knjige kako bi zainteresirali čitatelje, a to suna prvom mjestu studenti Stručnog studija mehatronike u Bjelovaru.
U drugom poglavlju opisani su osnovni pojmovi kao što je dinamički sustav teklasifikacija sustava. Opisane su pojedine zanimljive vrste sustava (tehničke, biološke,ekonomske, informacijske i dr.) pri ćemu se najveće težište daje dinamičkim tehničkimsustavima. Nadalje, opisna je podjela sustava s obzirom na matematički model nužanza njihov opis, svojstvo signala i parametara, broj ulaznih i izlaznih signala i drugo.Nama će od najveće zanimljivosti biti sustavi koji su linearni, vremenski nepromijenjivi,kontinuirani, deterministički, koji imaju koncentrirane parametre i koji su kauzalni.Sustavi ovakvih svojstava zanimljivi su iz razloga što za njih postoje razne metodeanalize i sinteze sustava upravljanja.
U trećem poglavlju opisat ćemo matematičke aparate za opis sustava, a to su diferen-cijalne jednadžbe, prijenosna funkcija dobivena Laplaceovom transformacijom te opissustava varijablama stanja. Sustave u opisu varijablama stanja opisat ćemo samoukratko. Svi tehnički sustavi koji posjeduju svojstvo memorije (pohrane energije)mogu se opisati diferencijalnim jednadžbama n-tog reda gdje je red sustava jednakbroju spremnika energije u sustavu. Spremnici energije su kondenzatori, zavojnice,
2 Uvod
zamašne mase, opruge, prigušnice, spremnici tekučine i slično. Opisat ćemo metoderiješavanja diferencijalnih jednadžbi te lako uočiti da za veliki red sustava one postajuračunski složene. Zbog toga je uvedena Laplaceova transformacija kojom se diferen-cijalne jednadžbe transformiraju u algebarske jednadžbe kojima je vrlo jednostavnomanipulirati. Nakon algebarske manipulacije radi se inverzna Laplaceova transforma-cija te se dobije vremensko rješenje odziva (izlaza) sustava u ovisnosti o pubudi (ulazu)sustava. Znanja stećena u trećem poglavlju bit će dovoljna za početak vremenske ifrekvencijske analize sustava upravljanja.
U četvrtom poglavlju opisat ćemo vremenski odziv osnovnih dinamičkih članovatemeljen na znanjima stećenim iz prethodnog poglavlja. Najprije ćemo definirati os-novne vrste odziva sustava s obzirom na položaj polova (karakterisičnih vrijednost) sus-tava. Odziv sustava ovise o vrstama sustava (o vrstama dinamičkih članova). Opisatćemo proporcionalne članove nultog, prvog i drugog reda te proširiti znanja na sustaven-tog reda. Najzanimljiviji član u opisu sustava automatskog upravljanja je propor-cionalni član drugog reda s prigušenim oscilacijama (PT2S član). Razlog tome jenjegova učestalost i najčešća aproksimacija sustava višeg reda PT2S članom čime sepojednostavljuje sinteza regulacijskog kruga. Bitno je samo da se opiše dominantnadinamika sustava višeg reda PT2S članom. Osim proporcionalnih članova opisat ćemo iderivacijske (idealne i realne), integralne te članove s transportnim kašnjenjem. Razu-mijevanje vremenskog odziva bitno je zbog parametriranja sustava automatskog up-ravljanja kako bi se dobila željena vremenska vladanja sustava.
U petom poglavlju opisat ćemo frekvencijski odziv osnovnih dinamičkih članova.Za frekvencijski odziv koristit ćemo dva najćešće korištena grafička aparata, a to suNyquistov dijagram i Bodeov dijagram. Frekvencijska analiza dinamičkih sustava na-jčešće je korišteni aparat pri analizi i sintezi sustava automatskog upravljanja zbogjednostavnog snimanja frekvencijske karakteristike. Znanja usvojena u frekvencijskojanalizi osnovnih dinamičkih sustava lako ćemo proširiti na sustave n-tog reda. Ovopoglavlje bitno je dobro savladati i zbog stabilnosti sustava upravljanja koju ćemoopisati u sedmom poglavlju. Vremenski i frekvencijski odziv povezani su pokazateljimakavlitete u vremenskom i frekvencijskom području.
U šestom poglavlju opisat ćemo blokovsku algebru sustava upravljanja. S obziromda su sustavi upravljanja sastavljeni od pojedinih podustava, potrebno je proučiti nakoji način podsustavi djeluju jedan na drugi. U ovom poglavlju dolazimo do najbit-nijeg pojma u automatskom upravljanju, a to je negativna povratna veza kojom jeomogućeno upravljanje sustava u zatvorenom regulaciskom krugu.
Sva dosad opisana poglavlja zapravu su priprema za ono što je cilj automatskogupravljanja, a to je sinteza regulatora (regulacijskog člana) koja je opisana u osmompoglavlju. Opisani su osnovni tipovi regulatora, procesa, mjernih članova i aktuatora.Parametriranje regulatora ovisi o zahtjevima na sustav. Tako postoje i neke iskustvenemetode parametriranja, ali naravno i matematičke metode parametriranja kako bi seostavrilo željeno ponašanje sustava (željeni pokazatelji kvalitete).
S obzirom da je računalna znanost danas napredovala, računalo je uobičajen podsus-tav automatskog sustava upravljanja. Računalo predstavlja digitalni (diskretni sustav)stoga se u devetom poglavlju obrađuje uvod u diskretne sustave upravljanja. Danasse često koriste mikroračunalni sustavi, programirljivi logički kontroleri i slično za up-ravljanje sustavima. Analiza i sinteza obavi se u kontinuiranom sustavu, a zatim senekim od diskretizacija algoritam upavljanja prevede u diskretan oblik s vremenom

3
diskretizacije TD. Diskretnim sustavima upravljanja završavamo ovu knjigu u smisluteoretiziranja o sustavima automatskog upravljanja.
U poglavlju DODATAK nalaze se opisi nekih važnih matematičkih aparata tekorištenje simulacijskog paketa Matlab SIMULINKA u analizi i sintezi sustava au-tomatskog upravljanja.

4 Uvod
Poglavlje 2
Osnovni pojmovi
2.1 Dinamički sustavi
U svakodnevnom razgovoru s ljudima može se čuti riječ sustav. Pojam sustav imarazličit smisao u pojedinim područjima znanosti. Iz tog razloga postoji mnogo definicijasustava[1]:
Websterov rječnik: „Sustav je skup objekata objedinjenih nekim oblikom međudjelo-vanja ili međuovisnosti.“
Vladimir Kučera: „Sustav je dio svijeta koji je povezan s okolinom preko ulaznoizlaznih djelovanja. Ulazna (pobudna) djelovanja sustav preoblikuje u izlazna (odzivna)djelovanja. Izlaz sustava općenito može ovisiti o trenutku pobude i o "memoriji" sustavado trenutka pobude. Povijest, odnosno "memorija" sustava tretira se konceptom stanjasustava“
Uz navedene definicije sustava, mogu se uklopiti mnogi sustavi kao što su:
• tehnički;
• biološki
• ekonomski
• informacijski
• transportni i sl.
U daljnjem razmatranju sustava pod pojmom sustav podrazumijeva se dinamički tehničkisustav.
Pod sustavom općenito se podrazumijeva događanje koje izaziva promjenu stanjamaterije, energije ili informacije. Iz toga slijedi još jedna definicija sustava:Sustav je događanje kroz koje se mijenja stanje materije, energije ili informacije. Ovupromjenu stanja može se shvatiti kao prijelaz iz početnog stanja u konačno stanje (slika2.1).
6 Osnovni pojmovi
Slika 2.1: Sustav kao događaj koji izaziva promijenu stanja
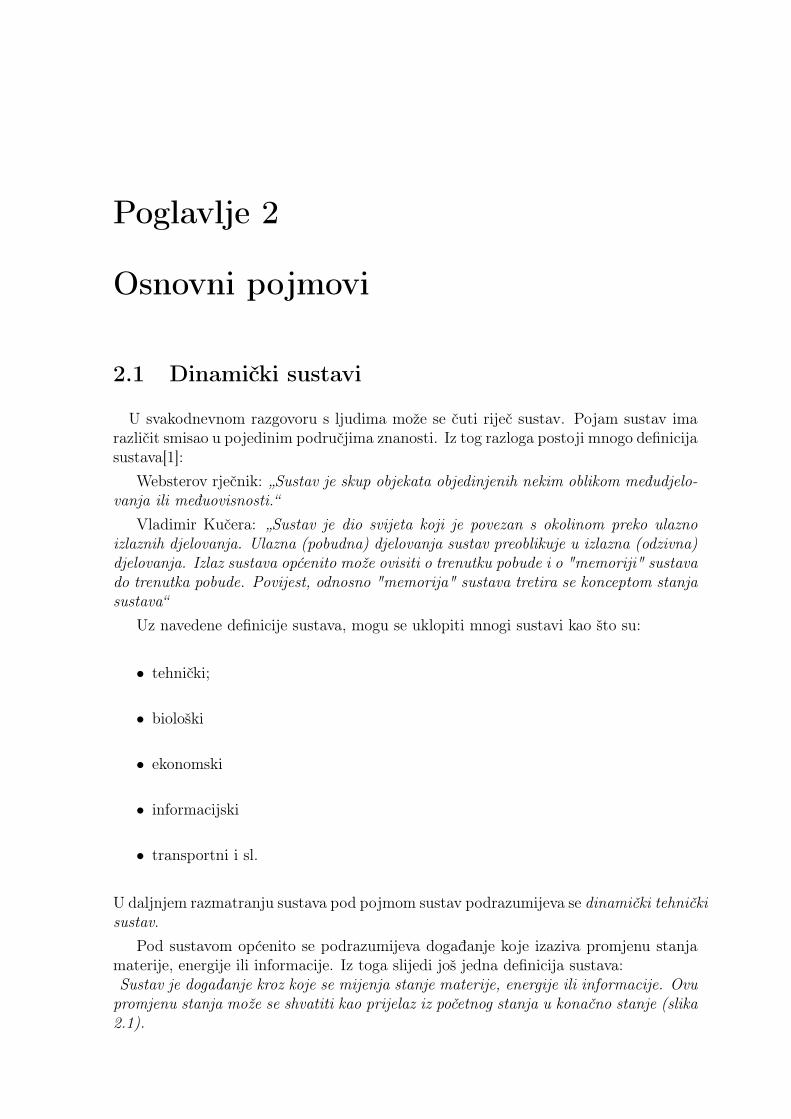
Slika 2.2: Primjer tehničkog sustava (automobilska industrija [2])
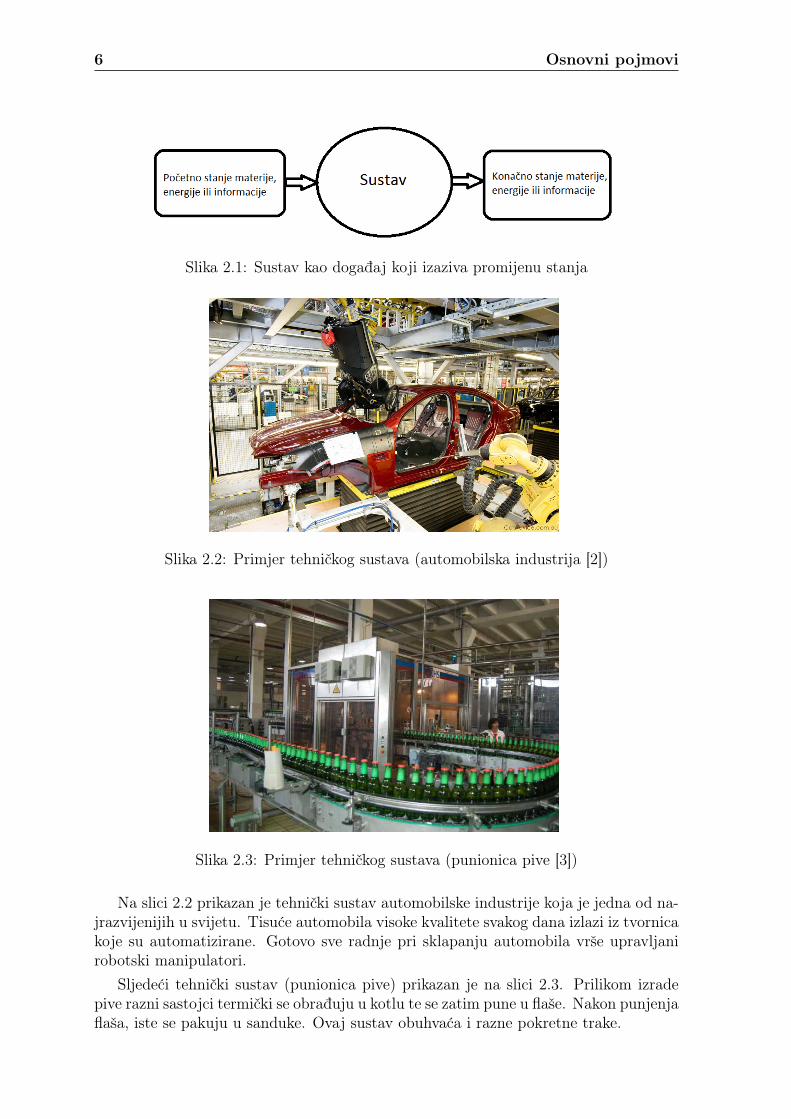
Slika 2.3: Primjer tehničkog sustava (punionica pive [3])
Na slici 2.2 prikazan je tehnički sustav automobilske industrije koja je jedna od na-jrazvijenijih u svijetu. Tisuće automobila visoke kvalitete svakog dana izlazi iz tvornicakoje su automatizirane. Gotovo sve radnje pri sklapanju automobila vrše upravljanirobotski manipulatori.
Sljedeći tehnički sustav (punionica pive) prikazan je na slici 2.3. Prilikom izradepive razni sastojci termički se obrađuju u kotlu te se zatim pune u flaše. Nakon punjenjaflaša, iste se pakuju u sanduke. Ovaj sustav obuhvaća i razne pokretne trake.
2.1 Dinamički sustavi 7
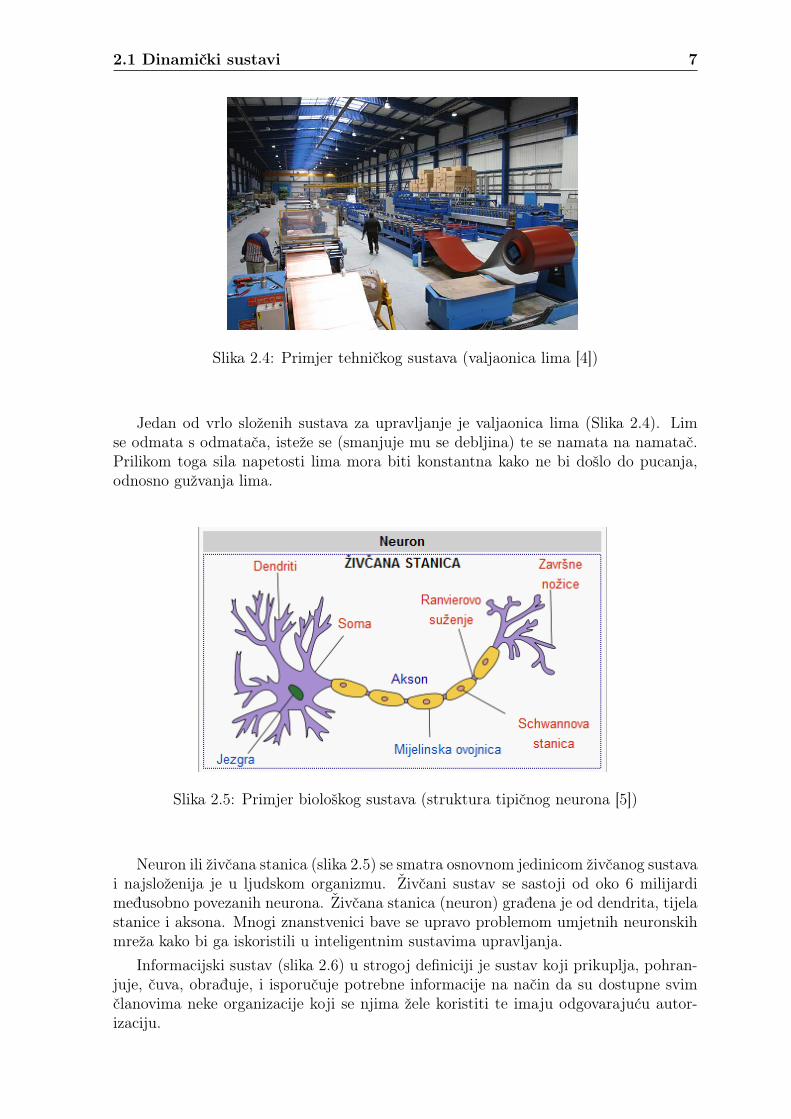
Slika 2.4: Primjer tehničkog sustava (valjaonica lima [4])
Jedan od vrlo složenih sustava za upravljanje je valjaonica lima (Slika 2.4). Limse odmata s odmatača, isteže se (smanjuje mu se debljina) te se namata na namatač.Prilikom toga sila napetosti lima mora biti konstantna kako ne bi došlo do pucanja,odnosno gužvanja lima.
Slika 2.5: Primjer biološkog sustava (struktura tipičnog neurona [5])
Neuron ili živčana stanica (slika 2.5) se smatra osnovnom jedinicom živčanog sustavai najsloženija je u ljudskom organizmu. Živčani sustav se sastoji od oko 6 milijardimeđusobno povezanih neurona. Živčana stanica (neuron) građena je od dendrita, tijelastanice i aksona. Mnogi znanstvenici bave se upravo problemom umjetnih neuronskihmreža kako bi ga iskoristili u inteligentnim sustavima upravljanja.
Informacijski sustav (slika 2.6) u strogoj definiciji je sustav koji prikuplja, pohran-juje, čuva, obrađuje, i isporučuje potrebne informacije na način da su dostupne svimčlanovima neke organizacije koji se njima žele koristiti te imaju odgovarajuću autor-izaciju.
8 Osnovni pojmovi
Slika 2.6: Primjer informacijskog sustava [6]
2.2 Klasifikacija sustava
Sustave je moguće klasificirati na razne načine, kao što su:
• matematički model nužan za njihov opis;
• svojstvo signala i parametara;
• broj ulaznih i izlaznih signala i sl.
Sustavi se mogu podjeliti s obzirom na:
• Zakonitosti vladanja
– Linearni sustavi
– Nelinearni sustavi
• Ponašanje u vremenu
– Vremenski promjenjivi sustavi
– Vremenskine promjenjivi sustavi
• Signal u vremenu
– Kontinuirani sustavi
– Diskretni sustavi
• Svojstva signala
– Deterministički sustavi
– Nedeterministički sustavi
– Stohastički sustavi
• Parametre

2.2 Klasifikacija sustava 9
– Sustavi s koncentriranim parametrima
– Sustavi s raspodijeljenim parametrima
• Broj pobuda i odziva
– SISO sustavi (Single input, single output)
– MIMO sustavi (Multiple input, multiple output)
• Memoriju
– Sustavi s memorijom
– Sustavi bez memorije
• Kauzalnost
– Kauzalni sustavi
– Nekauzalni sustavi
2.2.1 Linearni i nelinearni sustavi
Linearni sustavi
Za linearne sustave neophodno je da vrijedi svojstvo linearnosti. Neka funkcija f(x)linearna je ako za nju vrijede sljedeća svojstva:
1. aditivnost: f(x1 + x2) = f(x1) + f(x1) za svaki x1 i x2 u domeni funkcije f(x).
2. homogenost: f(αx) = αf(x) za svaki x u domeni funkcije f(x) i za sve α = const..
Primjer 2.1Za zadane funkcije f(x) provjeriti svojstvo aditivnosti i homogenosti te nakon toga
odrediti da li je sustav linearan ili nije. Obrazložiti!1. f(x) = 5x
aditivnost: f(x1 + x2) = 5(x1 + x2) = 5x1 + 5x2 = f(x1) + f(x2)Svojstvo aditivnosti je zadovoljeno!
homogenost: f(αx) = 5αx = α5x = αf(x)Svojstvo homogenosti je zadovoljeno! Sustav je linearan!
2. f(x) = sin x
aditivnost: f(x1 + x2) = sin(x1 + x2) 6= sinx1 + sinx2 6= f(x1) + f(x2)Svojstvo aditivnosti nije zadovoljeno! Sustav nije linearan!
Linearni se dinamički sustavi mogu opisati linearnim diferencijalnim jednadžbamakoje zadovoljavaju oba navedena svojstva. Radi jednostavnosti, neki sustav je lin-earan ako je opisan linearnim diferencijalnim jednadžbama s konstantnim koeficijen-tima. U tehničkom pogledu, ne postoji savršeni linearni sustav, ali mnogi sustavi se
10 Osnovni pojmovi
mogu opisati linearnim sustavima oko neke radne točke ili se ponašaju vrlo slično lin-earnim sustavima.
Primjer 2.2Za zadane diferencijalne jednadžbe odrediti linearnost. Obrazložiti!1. 3y(t) + 5y(t) + 6y(t) = u(t) + 2u(t) gdje je u(t) ulaz u sustav, a y(t) izlaz iz
sustava.S obzirom da su svi koeficijenti uz vremenske derivacije konstante, sustav je lin-
earan!2. cos(t)y(t) + y(t) = sin(t)u(t) gdje je u(t) ulaz u sustav, a y(t) izlaz iz sustava.S obzirom da uz vremensku derivaciju izlaza i uz ulaz sustava stoji vremenski promi-
jenjivi koeficijenti, sustav nije linearan!Također se može reći da je sustav linearan ako vrijedi načelo: koliko se puta promi-
jeni ulazna veličina sustava, toliko se puta promijeni i izlazna veličina sustava. Ovulaičku definiciju moguće je potkrijepiti sljedećim slikama.
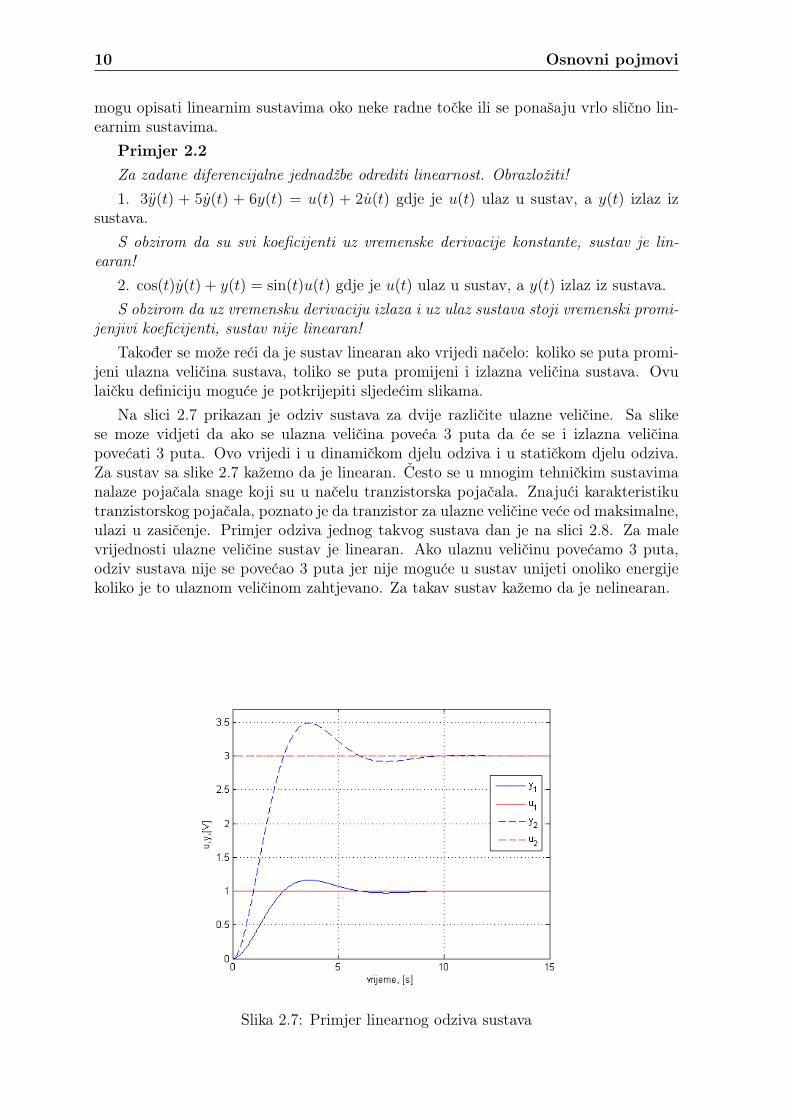
Na slici 2.7 prikazan je odziv sustava za dvije različite ulazne veličine. Sa slikese moze vidjeti da ako se ulazna veličina poveća 3 puta da će se i izlazna veličinapovećati 3 puta. Ovo vrijedi i u dinamičkom djelu odziva i u statičkom djelu odziva.Za sustav sa slike 2.7 kažemo da je linearan. Često se u mnogim tehničkim sustavimanalaze pojačala snage koji su u načelu tranzistorska pojačala. Znajući karakteristikutranzistorskog pojačala, poznato je da tranzistor za ulazne veličine veće od maksimalne,ulazi u zasičenje. Primjer odziva jednog takvog sustava dan je na slici 2.8. Za malevrijednosti ulazne veličine sustav je linearan. Ako ulaznu veličinu povećamo 3 puta,odziv sustava nije se povećao 3 puta jer nije moguće u sustav unijeti onoliko energijekoliko je to ulaznom veličinom zahtjevano. Za takav sustav kažemo da je nelinearan.
Slika 2.7: Primjer linearnog odziva sustava
2.2 Klasifikacija sustava 11
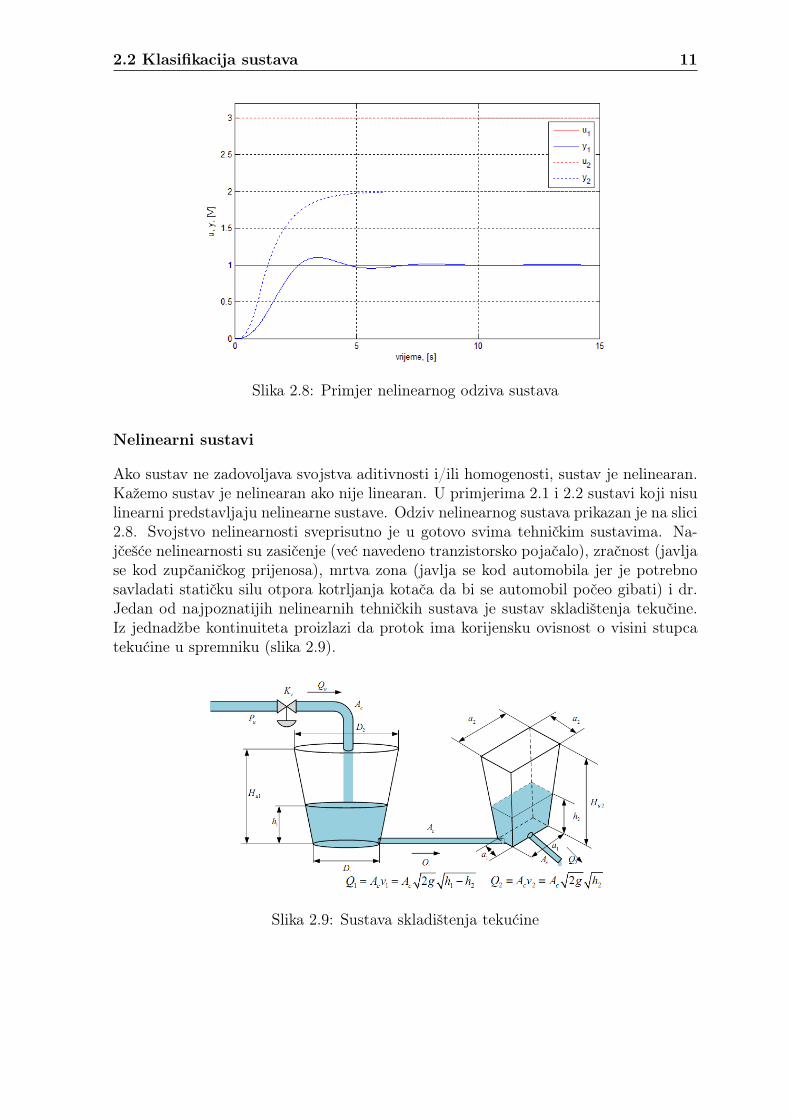
Slika 2.8: Primjer nelinearnog odziva sustava
Nelinearni sustavi
Ako sustav ne zadovoljava svojstva aditivnosti i/ili homogenosti, sustav je nelinearan.Kažemo sustav je nelinearan ako nije linearan. U primjerima 2.1 i 2.2 sustavi koji nisulinearni predstavljaju nelinearne sustave. Odziv nelinearnog sustava prikazan je na slici2.8. Svojstvo nelinearnosti sveprisutno je u gotovo svima tehničkim sustavima. Na-jčešće nelinearnosti su zasičenje (već navedeno tranzistorsko pojačalo), zračnost (javljase kod zupčaničkog prijenosa), mrtva zona (javlja se kod automobila jer je potrebnosavladati statičku silu otpora kotrljanja kotača da bi se automobil počeo gibati) i dr.Jedan od najpoznatijih nelinearnih tehničkih sustava je sustav skladištenja tekučine.Iz jednadžbe kontinuiteta proizlazi da protok ima korijensku ovisnost o visini stupcatekućine u spremniku (slika 2.9).
Slika 2.9: Sustava skladištenja tekućine
12 Osnovni pojmovi
2.2.2 Vremenski nepromjenjivi i vremenski promjenjivi sustavi
Vremenski nepromjenjivi sustavi
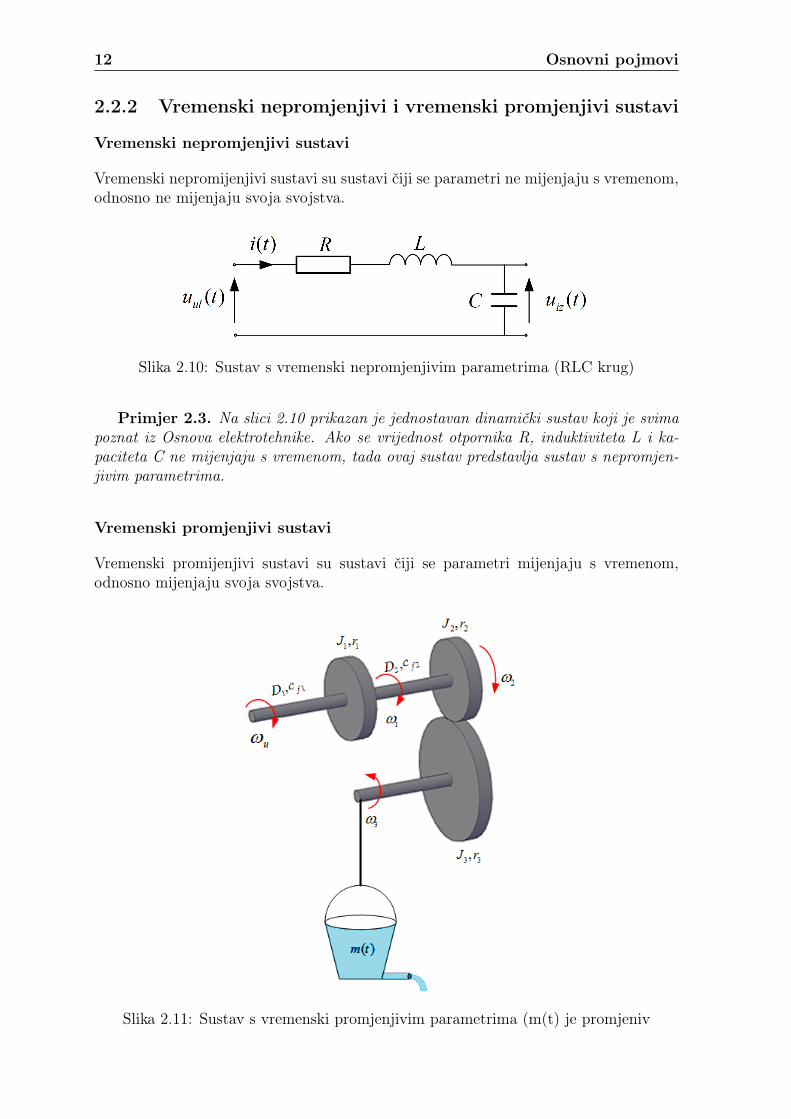
Vremenski nepromijenjivi sustavi su sustavi čiji se parametri ne mijenjaju s vremenom,odnosno ne mijenjaju svoja svojstva.
Slika 2.10: Sustav s vremenski nepromjenjivim parametrima (RLC krug)
Primjer 2.3. Na slici 2.10 prikazan je jednostavan dinamički sustav koji je svimapoznat iz Osnova elektrotehnike. Ako se vrijednost otpornika R, induktiviteta L i ka-paciteta C ne mijenjaju s vremenom, tada ovaj sustav predstavlja sustav s nepromjen-jivim parametrima.
Vremenski promjenjivi sustavi
Vremenski promijenjivi sustavi su sustavi čiji se parametri mijenjaju s vremenom,odnosno mijenjaju svoja svojstva.
Slika 2.11: Sustav s vremenski promjenjivim parametrima (m(t) je promjeniv
2.2 Klasifikacija sustava 13
Primjer 2.3. Na slici 2.11 prikazan je jednostavan rotacijski sustav s 3 zamašnemase i elastičnim osovinama. Na zadnjoj osovini, gdje se proizvodi kutna brzina ω3,krutim užetom pričvršćena je posuda za transport tekućine. S obzirom da posuda na dnuima cijev kroz koju istjeće tekućina, efektivna masa posude se smanjuje. S obzirom daje masa posude promjenjiva, sustav sa slike 2.11 je sustav s promjenjivim parametrima.Dizalo za transport ljudi također je sustav s promjenjivim parametrima jer masa ljudikoji se prevoze dizalom nije uvijek jednaka.
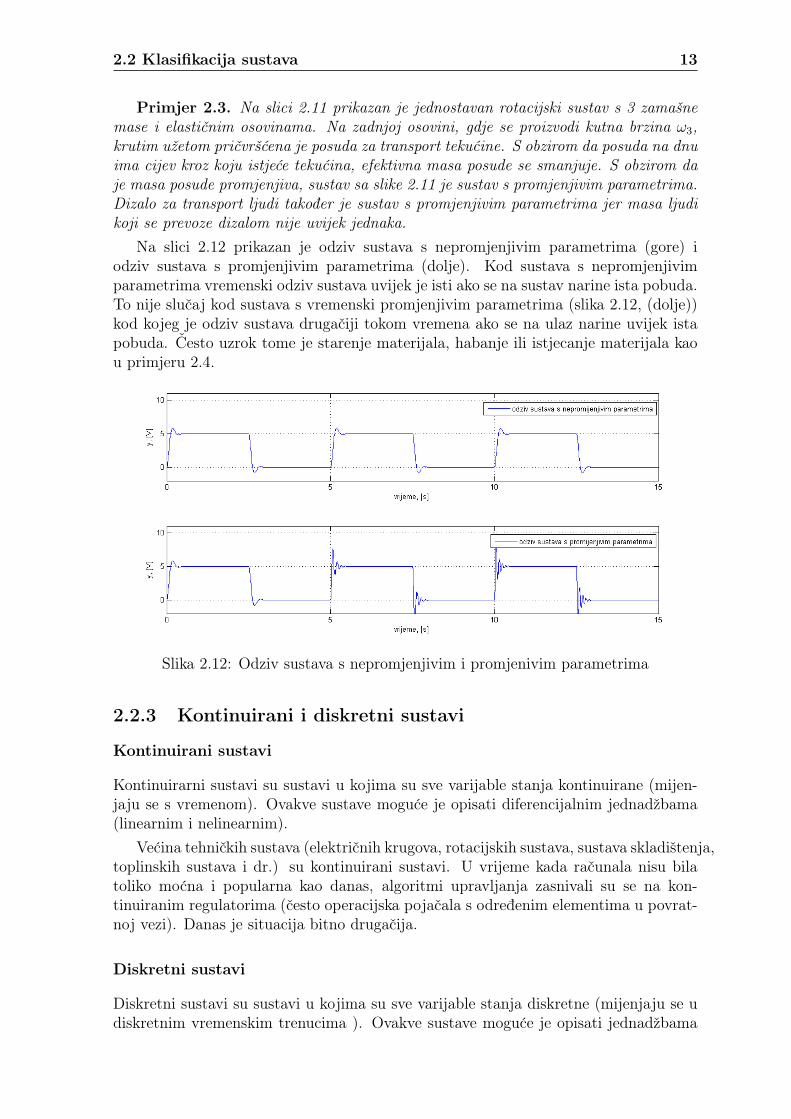
Na slici 2.12 prikazan je odziv sustava s nepromjenjivim parametrima (gore) iodziv sustava s promjenjivim parametrima (dolje). Kod sustava s nepromjenjivimparametrima vremenski odziv sustava uvijek je isti ako se na sustav narine ista pobuda.To nije slučaj kod sustava s vremenski promjenjivim parametrima (slika 2.12, (dolje))kod kojeg je odziv sustava drugačiji tokom vremena ako se na ulaz narine uvijek istapobuda. Često uzrok tome je starenje materijala, habanje ili istjecanje materijala kaou primjeru 2.4.
Slika 2.12: Odziv sustava s nepromjenjivim i promjenivim parametrima
2.2.3 Kontinuirani i diskretni sustavi
Kontinuirani sustavi
Kontinuirarni sustavi su sustavi u kojima su sve varijable stanja kontinuirane (mijen-jaju se s vremenom). Ovakve sustave moguće je opisati diferencijalnim jednadžbama(linearnim i nelinearnim).
Većina tehničkih sustava (električnih krugova, rotacijskih sustava, sustava skladištenja,toplinskih sustava i dr.) su kontinuirani sustavi. U vrijeme kada računala nisu bilatoliko moćna i popularna kao danas, algoritmi upravljanja zasnivali su se na kon-tinuiranim regulatorima (često operacijska pojačala s određenim elementima u povrat-noj vezi). Danas je situacija bitno drugačija.
Diskretni sustavi
Diskretni sustavi su sustavi u kojima su sve varijable stanja diskretne (mijenjaju se udiskretnim vremenskim trenucima ). Ovakve sustave moguće je opisati jednadžbama
14 Osnovni pojmovi
diferencije (linearnim i nelinearnim).Uvođenjem mikroračunala (mikrokontroleri, PLC, ugradbena računala i dr.) direk-
tno se uvodi diskretizacija signala u sustav. Mikroračunala rade u vremenski diskret-nim intervalima te tako predstavljaju diskretan sustav. Današnji regulatori tehničkihsustava u većini slučajeva su diskretnog tipa.
Ujedinjenjem rada diskretnih i kontinuiranih sustava dobivamo jednu funkcionalnucjelinu koja se naziva hibridnim sustavima (sadrži kontinuirane i diskretne podsustave).
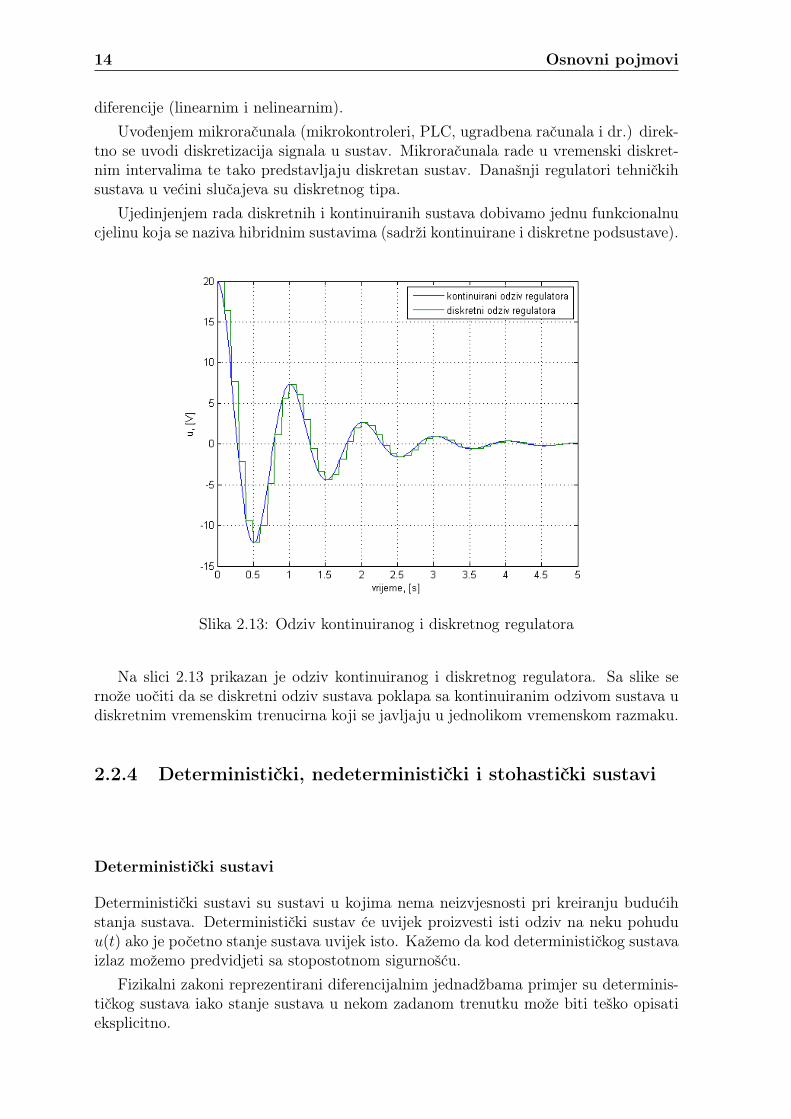
Slika 2.13: Odziv kontinuiranog i diskretnog regulatora
Na slici 2.13 prikazan je odziv kontinuiranog i diskretnog regulatora. Sa slike sernože uočiti da se diskretni odziv sustava poklapa sa kontinuiranim odzivom sustava udiskretnim vremenskim trenucirna koji se javljaju u jednolikom vremenskom razmaku.
2.2.4 Deterministički, nedeterministički i stohastički sustavi
Deterministički sustavi
Deterministički sustavi su sustavi u kojima nema neizvjesnosti pri kreiranju budućihstanja sustava. Deterministički sustav će uvijek proizvesti isti odziv na neku pohuduu(t) ako je početno stanje sustava uvijek isto. Kažemo da kod determinističkog sustavaizlaz možemo predvidjeti sa stopostotnom sigurnošću.
Fizikalni zakoni reprezentirani diferencijalnim jednadžbama primjer su determinis-tičkog sustava iako stanje sustava u nekom zadanom trenutku može biti teško opisatieksplicitno.
2.2 Klasifikacija sustava 15
Nedeterministički sustavi
Nedeterministički sustavi su sustavi u kojim postoji izvjesnost u kreiranju budućihstanja sustava. Nedeterrninistički sustav neće uvijek proizvesti isti odziv na nekupobudu u(t) ako je početno stanje sustava uvijek isto. Kažemo da kod nedeterminis-tičkog sustava ne možemo predvidjeti izlaz.
U automobilskoj industriji dnevno izlazi veliki broj gotovih proizvoda (automobila).U malom postotku automobila javljaju se tzv. "tvorničke greške’ što možemo nazvatinedeterminizmom jer ne možemo predvidjeti sa stopostotnom izvjesnošću da li će svakiautomobiI biti ispravan. Također i sustave sa promjenjivim parametrima možemopromatrati kao nedeterminističke sustave (slika 2.12)
Stohastički sustavi
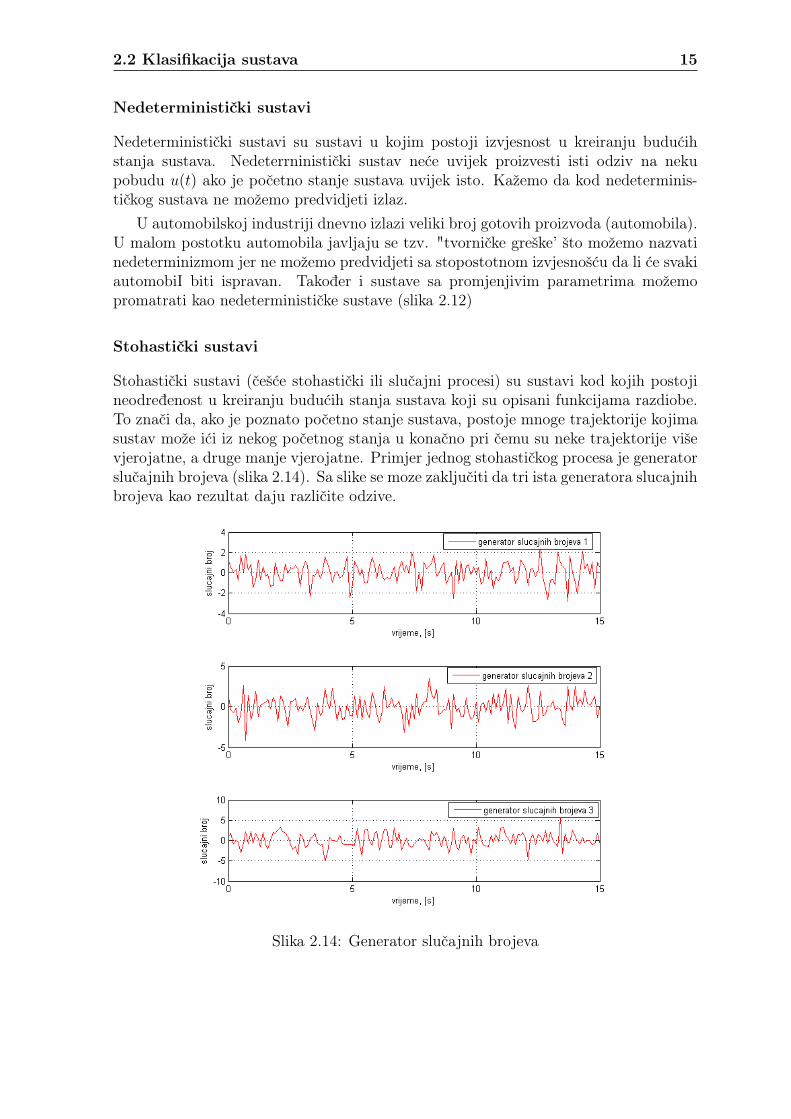
Stohastički sustavi (češće stohastički ili slučajni procesi) su sustavi kod kojih postojineodređenost u kreiranju budućih stanja sustava koji su opisani funkcijama razdiobe.To znači da, ako je poznato početno stanje sustava, postoje mnoge trajektorije kojimasustav može ići iz nekog početnog stanja u konačno pri čemu su neke trajektorije viševjerojatne, a druge manje vjerojatne. Primjer jednog stohastičkog procesa je generatorslučajnih brojeva (slika 2.14). Sa slike se moze zaključiti da tri ista generatora slucajnihbrojeva kao rezultat daju različite odzive.
Slika 2.14: Generator slučajnih brojeva
16 Osnovni pojmovi
2.2.5 Sustavi s koncentriranim parametrima i sustavi s raspod-jeljenim parametrima
Sustavi s koncentriranim parametrima
Sustavi s koncentriranim parametrima su sustavi čiji su parametri koncentrirani. Toznači da se svaka fizikalna veličina (otpor, masa, moment inercije i dr.) promatrau jednoj točki i takve komponente smatramo idealnima. Ovakve sustave opisujemodiferencijalnim jednadžbama.
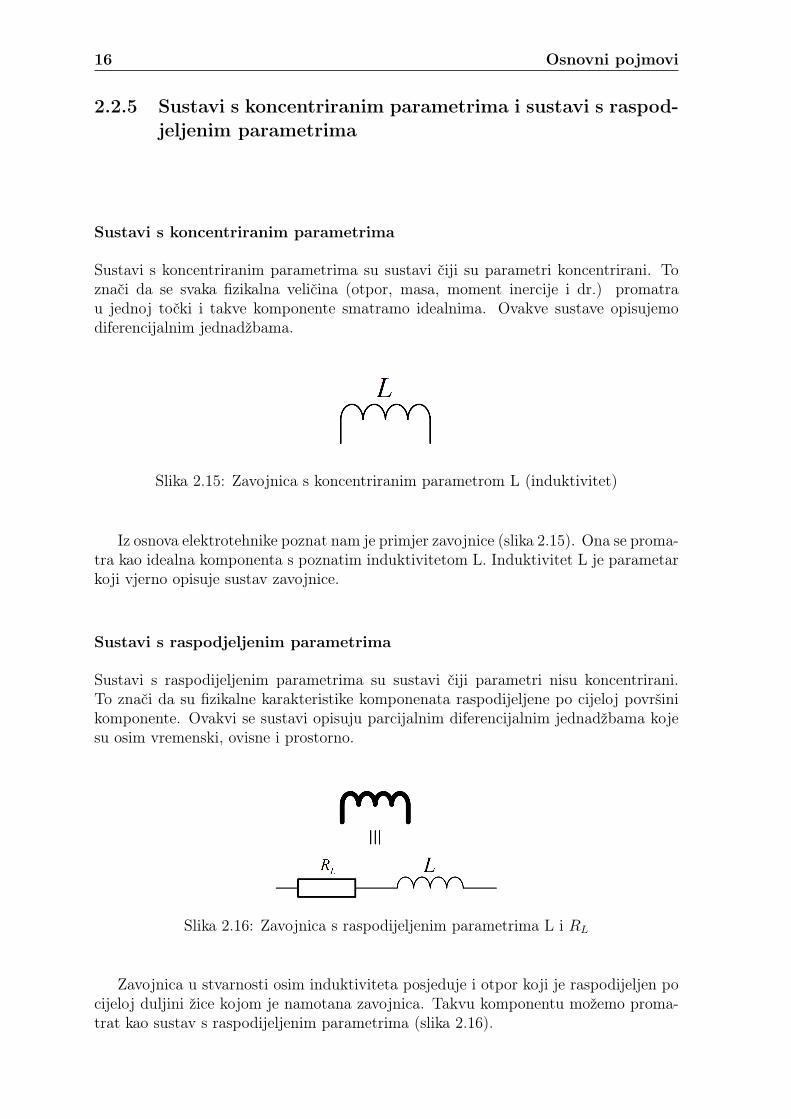
Slika 2.15: Zavojnica s koncentriranim parametrom L (induktivitet)
Iz osnova elektrotehnike poznat nam je primjer zavojnice (slika 2.15). Ona se proma-tra kao idealna komponenta s poznatim induktivitetom L. Induktivitet L je parametarkoji vjerno opisuje sustav zavojnice.
Sustavi s raspodjeljenim parametrima
Sustavi s raspodijeljenim parametrima su sustavi čiji parametri nisu koncentrirani.To znači da su fizikalne karakteristike komponenata raspodijeljene po cijeloj površinikomponente. Ovakvi se sustavi opisuju parcijalnim diferencijalnim jednadžbama kojesu osim vremenski, ovisne i prostorno.
Slika 2.16: Zavojnica s raspodijeljenim parametrima L i RL
Zavojnica u stvarnosti osim induktiviteta posjeduje i otpor koji je raspodijeljen pocijeloj duljini žice kojom je namotana zavojnica. Takvu komponentu možemo proma-trat kao sustav s raspodijeljenim parametrima (slika 2.16).
2.2 Klasifikacija sustava 17
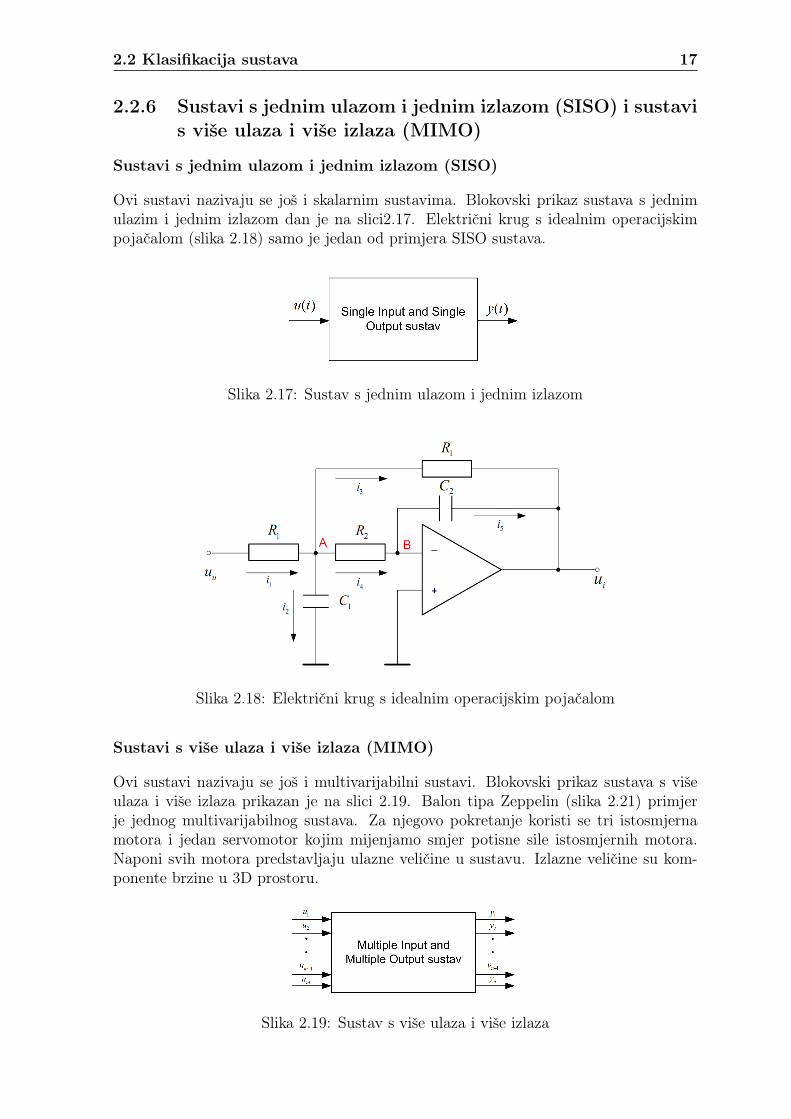
2.2.6 Sustavi s jednim ulazom i jednim izlazom (SISO) i sustavis više ulaza i više izlaza (MIMO)
Sustavi s jednim ulazom i jednim izlazom (SISO)
Ovi sustavi nazivaju se još i skalarnim sustavima. Blokovski prikaz sustava s jednimulazim i jednim izlazom dan je na slici2.17. Električni krug s idealnim operacijskimpojačalom (slika 2.18) samo je jedan od primjera SISO sustava.
Slika 2.17: Sustav s jednim ulazom i jednim izlazom
Slika 2.18: Električni krug s idealnim operacijskim pojačalom
Sustavi s više ulaza i više izlaza (MIMO)
Ovi sustavi nazivaju se još i multivarijabilni sustavi. Blokovski prikaz sustava s višeulaza i više izlaza prikazan je na slici 2.19. Balon tipa Zeppelin (slika 2.21) primjerje jednog multivarijabilnog sustava. Za njegovo pokretanje koristi se tri istosmjernamotora i jedan servomotor kojim mijenjamo smjer potisne sile istosmjernih motora.Naponi svih motora predstavljaju ulazne veličine u sustavu. Izlazne veličine su kom-ponente brzine u 3D prostoru.
Slika 2.19: Sustav s više ulaza i više izlaza

18 Osnovni pojmovi
Slika 2.20: Balon tipa Zeppelin
Slika 2.21: Sustav miješanja dviju tekućina
2.2.7 Sustavi s memorijom i sustavi bez memorije
Sustavi s memorijom
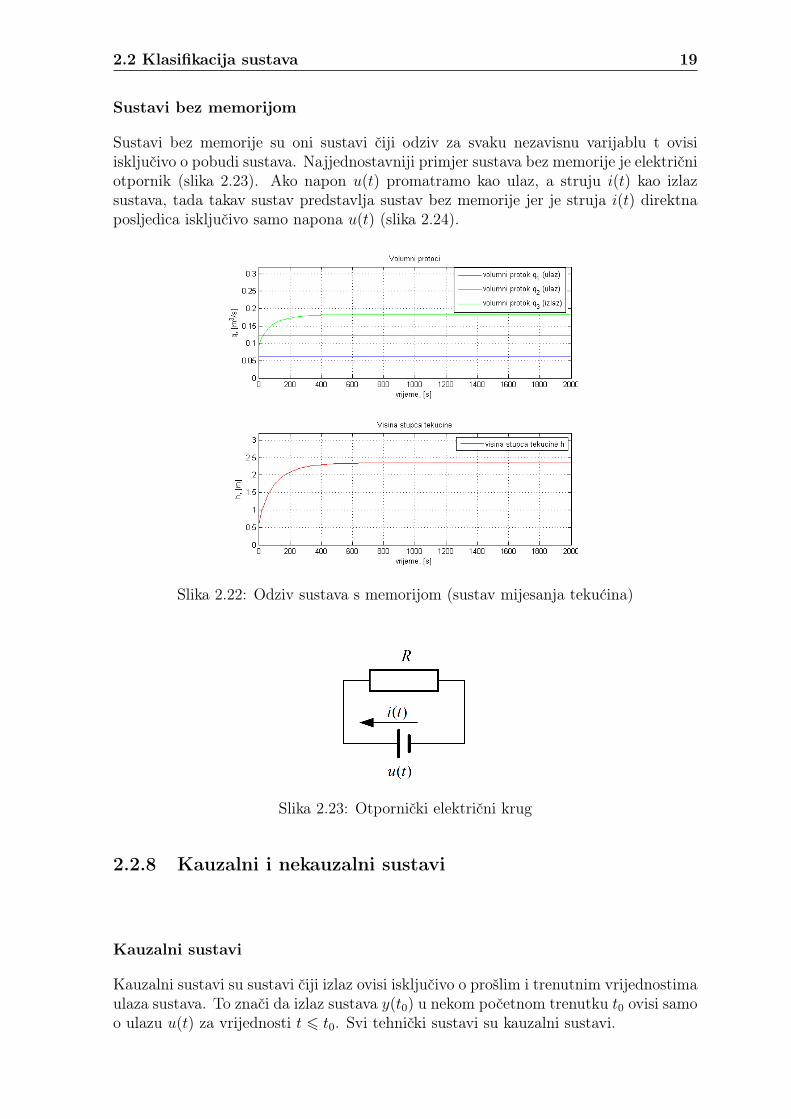
Za sustave kažemo da imaju memoriju ako njihov odziv za nezavisnu varijablu t (vri-jeme) ovisi i o pobudi i o početnom stanju sustava. Primjer sustava s memorijom jesustav miješanja dviju tekućina (slika 2.12). Naime, u sustavu je moguće protoke Q1 iQ2 promatrati kao ulaze sustava, a visinu stupca tekućine kao izlaz sustava. S obziromda u početnom stanju može postojati visina stupca tekućine h0 za ovaj sustav kažemoda je sustav s memorijom (slika 2.22).
2.2 Klasifikacija sustava 19
Sustavi bez memorijom
Sustavi bez memorije su oni sustavi čiji odziv za svaku nezavisnu varijablu t ovisiisključivo o pobudi sustava. Najjednostavniji primjer sustava bez memorije je električniotpornik (slika 2.23). Ako napon u(t) promatramo kao ulaz, a struju i(t) kao izlazsustava, tada takav sustav predstavlja sustav bez memorije jer je struja i(t) direktnaposljedica isključivo samo napona u(t) (slika 2.24).
Slika 2.22: Odziv sustava s memorijom (sustav mijesanja tekućina)
Slika 2.23: Otpornički električni krug
2.2.8 Kauzalni i nekauzalni sustavi
Kauzalni sustavi
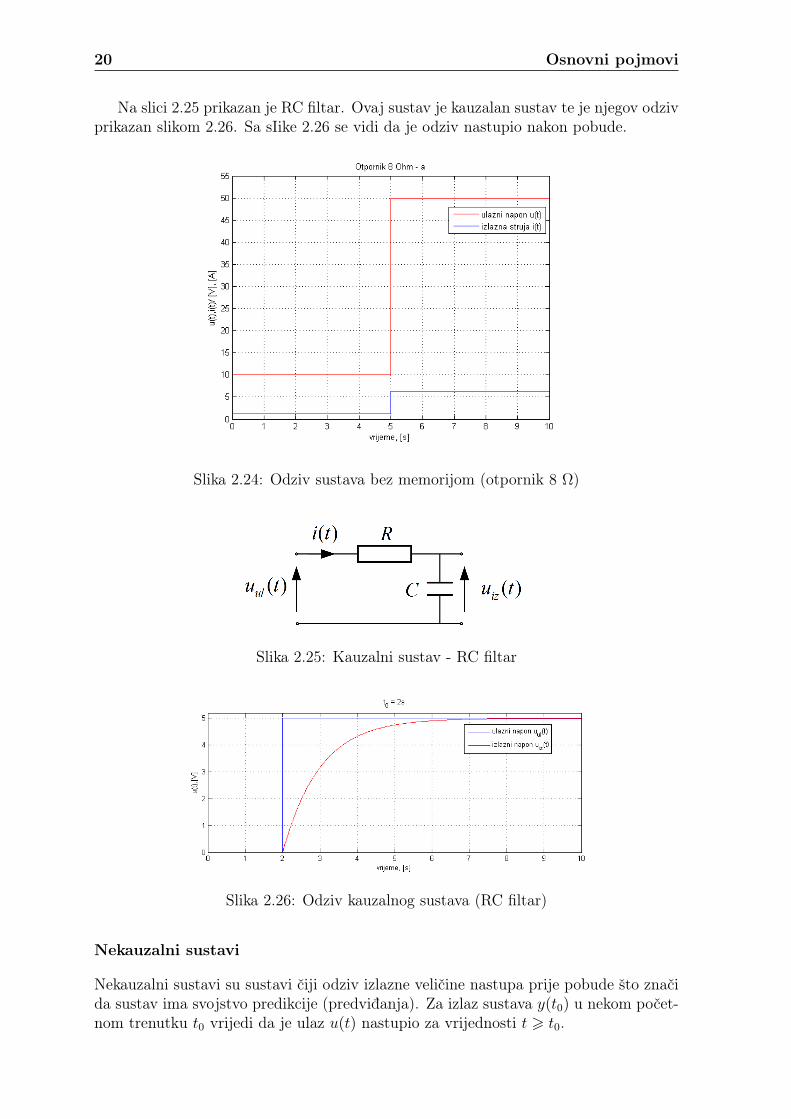
Kauzalni sustavi su sustavi čiji izlaz ovisi isključivo o prošlim i trenutnim vrijednostimaulaza sustava. To znači da izlaz sustava y(t0) u nekom početnom trenutku t0 ovisi samoo ulazu u(t) za vrijednosti t 6 t0. Svi tehnički sustavi su kauzalni sustavi.
20 Osnovni pojmovi
Na slici 2.25 prikazan je RC filtar. Ovaj sustav je kauzalan sustav te je njegov odzivprikazan slikom 2.26. Sa sIike 2.26 se vidi da je odziv nastupio nakon pobude.
Slika 2.24: Odziv sustava bez memorijom (otpornik 8 Ω)
Slika 2.25: Kauzalni sustav - RC filtar
Slika 2.26: Odziv kauzalnog sustava (RC filtar)
Nekauzalni sustavi
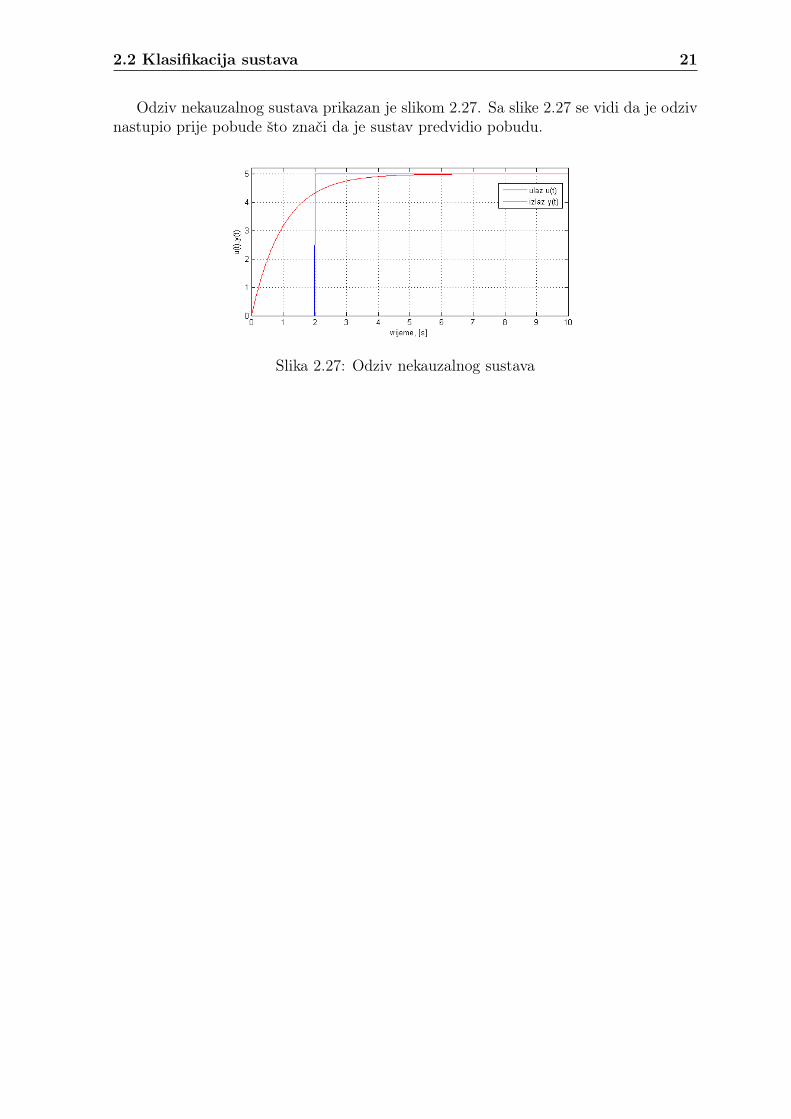
Nekauzalni sustavi su sustavi čiji odziv izlazne veličine nastupa prije pobude što značida sustav ima svojstvo predikcije (predviđanja). Za izlaz sustava y(t0) u nekom počet-nom trenutku t0 vrijedi da je ulaz u(t) nastupio za vrijednosti t > t0.
2.2 Klasifikacija sustava 21
Odziv nekauzalnog sustava prikazan je slikom 2.27. Sa slike 2.27 se vidi da je odzivnastupio prije pobude što znači da je sustav predvidio pobudu.
Slika 2.27: Odziv nekauzalnog sustava

22 Osnovni pojmovi
Poglavlje 3
Matematički modeli kontinuiranihsustava
Ako želimo raditi analizu dinamičkih sustava, koja je nužno potrebna pri sintezi reg-ulacijskih članova, potrebno je matematički opisati dinamiku sustava. Opis sustavakreće od spoznaje bitnih fizikalnih načela. Električni sustavi opisuju se Kirchhoffovimzakonima, mehanički sustavi opisuju se Newtonovim zakonima, termodinamički sus-tavi opisuju se zakonima termodinamike itd. Također je potrepno poznavati zakoneočuvanja energije (energetska bilanca), zakone o očuvanju količine gibanja itd [7].
Dinamika sustava može se opisati na nekoliko načina. Među prvim opisima di-namike sustava bio je opis sustava diferencijalnim jednadžbama. Ako promatramoSISO sustav (jedan ulaz i jedan izlaz) onda je potrebno izračunati izlaz sustava ako nanjega narinemo neku proizvoljnu pobudu. Često je to mukotrpan posao, pogotovo zasustave višeg reda. Na temelju opisa sustava diferencijalnim jednadžbama sintezom reg-ulacijskog člana (regulatora) dobije se upravljački algoritam koji je često diferencijalnajednadžba. Ovakav pristup sintezi zahtjeva mnogo računanja i poznavanje rješenjadiferencijalnih jednadžbi. Postoji dvije vrste diferencijalnih jednadžbi:
1. Obične diferencijalne jednadžbe
2. Parcijalne diferencijalne jednadžbe
Parcijalne diferencijalne jednadžbe imaju više nezavisnih varijabli; vrijeme i prostornevarijable. Pretpostavimo da ćemo sve, nama zanimljive, sustave moći opisati običnimdiferencijalnim jednadžbama pa nećemo posebno opisivati parcijalne diferencijalne jed-nadžbe.
Obične diferencijalne jednadžbe imaju samo jednu nezavisnu varijablu, a to je vri-jeme. U opisu dinamičkih sustava uvijek tražimo vremenske odzive nekog sustavatako da će nam obične diferencijalne jednadžbe (u daljnjem tekstu samo diferencijalnejednadžbe) biti sasvim dovoljne za opis dinamičkih sustava. S obzirom da je matem-atički aparat rješavanja diferencijalnih jednadžbi vrlo složen (naročito za sustave višegreda), koriste se druge metode za rješavanje diferencijalnih jednadžbi. Matematičari astronom Pierre-Simon Laplace (23. ožujak 1749. – 5. ožujak 1827.) osmislio jeintegralnu transformaciju koja olakšava matematički račun jer se sve diferencijalnejednadžbe u području varijable integralne transformacije (područje kompleksne vari-jable s) računaju algebarski. Integralna transformacija nazvana je prema navedenom

24 Matematički modeli kontinuiranih sustava
matematičaru Laplaceova transformacija i danas nalazi veliku primjenu pri opisu di-namičkih sustava. Transformacija se primjenjuje na linearne diferencijalne jednadžbetako da se uvede supstitucija s→ d/dt. Algebarskim putem nađe se rješenje jednadžbena proizvoljnu pobudu u Laplaceovoj domeni, a zatim se inverznom transformacijomizračuna vremenski odziv. Iako naočigled idemo dužim putem rješavanja diferencijal-nih jednadžbi, ova metoda puno je jednostavnija od rješavanja diferencijalnih jednadžbiklasičnim metodama. Često se u diferencijalne jednadžbe n-tog reda opisuju s n difer-encijalnih jednadžni prvog reda. Takav matematiči opis sustava naziva se opis sustavavarijablama stanja.
3.1 Opis sustava diferencijalnim jednadžbama
Neka diferencijalna jednadžba ima oblik (7.1) [8]:
any(n)(t)+ ...+a2y
′′(t)+a1y′(t)+a0y(t) = f(t) = bnu
(n)(t)+ ...+b1u′(t)+b0u(t) (3.1)
gdje je y(t) rješenje diferencijalne jednadžbe1, a f(t) proizvoljna pobuda. Ako vrijedida je f(t) = 0 tada diferencijalnu jednadžbu nazivamo homogenom.
any(n)(t) + ...+ a2y
′′(t) + a1y′(t) + a0y(t) = 0 (3.2)
Homogeno rješenje jednadžbe pretpostavlja se u obliku eksponencijalne funkcije i jed-nako je:
yH = y1 + y2 + ...yn
y1 = C1eλ1t, y2 = C2e
λ2t, ..., yn = Cneλnt
(3.3)
gdje je karakteristična vrijednost λn ∈ C2. Uvrštavanjem u relaciju (7.5) Ceλt dobijese:
anλneλt + ...+ a2λ
2eλt + a1λeλt + a0e
λt = 0(anλ
n + ...+ a2λ2 + a1λ+ a0
)eλt = 0
anλn + ...+ a2λ
2 + a1λ+ a0 = 0
(3.4)
Rješavanjem jednadžbe (7.12) n-tog reda dobiju se karakteristične vrijednosti λ1, λ2,...,λn.U slučaju da imamo m jednakih karakterističnih vrijednosti λ1 = λ2 =, ...,= λm , ondariješenja homogene jednadžbe mjenjaju oblik u:
yH = y1 + y2 + ...+ ym + ...yn
y1 = C1eλ1t, y2 = C2te
λ1t, ..., ym−1 = Cm−1tm−2eλ1t, ym = Cmt
m−1eλ1t, ...
..., yn−1 = Cn−1eλn−1t, yn = Cne
λnt
(3.5)
Ako je f(t) 6= 0 tada je potrebno izračunati i partikularno rješenje diferencijalne jed-naddžbe3. Pobuda može biti raznih oblika od kojih su najbitnije prikazane slikom 3.1.S obzirom na vrstu pobude, potrebno je pretpostaviti i partikularno rješenje. Ako jepobuda konstantna (skokovita pobuda, slika 3.1 b)) partiklarno rješenje pretpostavljase kao yP (t) = K1µ(t). Za pobudu tipa rampe (slika 3.1 c)) partikularno rješenjepretpostavlja se u obliku yP (t) = K1µ(t) +K2t.
1Derivacija y(t) skraćeno se može pisati y′(t) = dy(t)dt
2Skup kompleksnih brojeva3Odziv sustava s obzirom na pobudu

3.1 Opis sustava diferencijalnim jednadžbama 25
Slika 3.1: Vremenske pobude
Pretpostavljeno partikularno rješenje uvrsti se u diferencijalnu jednadžbu (7.1) kakobi se pronašli koeficijenti K1 i K2. Ako vrijedi da su b[i] = 0 za i > 0 za skokovitupobudu slijedi:
any(n)(t) + ...+ a2y
′′(t) + a1y′(t) + a0y(t) = b0u(t)|u(t)=Kµ(t)
anyp(n)(t) + ...+ a2y
′′p(t) + a1y
′p(t) + a0yp(t) = b0Kµ(t)|yp(t)=K1µ(t),t>0
an · 0 + ...+ a2 · 0 + a1 · 0 + a0K1 = b0K ⇒ K1 =b0K
a0
yp(t) =b0K
a0µ(t)
(3.6)
a za pobudu tipa rampe slijedi:
any(n)(t) + ...+ a2y
′′(t) + a1y′(t) + a0y(t) = b0u(t)|u(t)=Kt
anyp(n)(t) + ...+ a2y
′′p(t) + a1y
′p(t) + a0yp(t) = b0Kt|yp(t)=K1µ(t)+K2t,t>0
an · 0 + ...+ a2 · 0 + a1K2 + a0 (K1 +K2t) = b0Kt
a0K2t+ a1K2 + a0K1 = b0Kt
(3.7)
Izjednačavanjem koeficijenata slobodnih članova4 i koeficijenata uz nezavisnu vremen-sku varijablu t dobije se:
a0K2 = b0K ⇒ K2 =b0K
a0
a1K2 + a0K1 = 0⇒ K1 = −a1K2
a0= −a1b0K
a02
yp(t) =a1b0K
a02µ(t) +
b0K
a0t
(3.8)
Rješenje diferencijalne jednadžbe jednako je zbroju homogenog i partikularnogrješenja[9].
y(t) = yH(t) + yp(t)
y(t) = C1eλ1t + C2te
λ1t + ...+ Cneλnt + yp(t)
(3.9)
Potrebno je još samo izračunati koeficijente homogenog rješenja. Za diferencijalnu jed-nadžbu n-tog reda potrebno je znati n−1 početnih uvjeta (y(0), y′(0), y′′(0), ..., y(n−1)(0)
4Članovi koji uza sebe nemaju vremensku nezavisnu varijablu t

26 Matematički modeli kontinuiranih sustava
kako bi se mogli proračunati koeficijenti homogene jednadžbe. Jednadžba (7.1) derivirase n− 1 puta:
y(t) = C1eλ1t + C2e
λ2t + ...+ Cneλnt + yp(t)
y′(t) = C1λ1eλ1t + C2λ2e
λ2t + ...+ Cnλneλnt + y′p(t)
.
.
y(n−1)(t) = C1λ1n−1eλ1t + C2λ2
n−1eλ2t + ...+ Cnλnn−1eλnt + y(n−1)p(t)
(3.10)
te se u derivacije od y(t) uvrste početni uvjeti za t = 0.
y(0) = C1 + C2 + ...+ Cn + yp(0)
y′(0) = C1λ1 + C2λ2 + ...+ Cnλn + y′p(0)
.
.
y(n−1)(0) = C1λ1n−1 + C2λ2
n−1 + ...+ Cnλnn−1 + y(n−1)p(0)
(3.11)
Rješenjem sustava (7.2) n jednadžbi i n nepoznanica dobiju se koeficijenti homogenejednadžbe. Time smo dobili potpuno rješenje diferencijalne jednadžbe. Ako sustavpobudimo dirac delta funkcijom (slika 3.1 a)), dobije se impulsni odziv odnosno težin-ska funkcija sustava g(t). Težinska funkcija sustava predstavlja matematički modelsustava u vremenskoj domeni. Odziv sustava na bilo koju pobudu može se dobitikonvolucijskim integralom[10]:
y(t) = g(t) ∗ u(t) =
∫ t
0
g(τ)u(t− τ)dτ (3.12)
gdje je y(t) odziv sustava na pobudu u(t), a g(t) težinska funkcija sustava. Prilikomopisa sustava diferencijalnim jednadžbama koristit ćemo dva primjera sustava izOsnovaelektrotehnike i jedan primjer iz rotacijskih sustava. Prvi sustav koji ćemo opisatidiferencijalnim jednadžbama biti će već spominjani RC filtar.
Slika 3.2: RC filtar
Na slici 3.2 prikazan je svima poznat sustav iz elektronike – RC filtar. Sustav imajedan spremnik energije (kondenzator - spremnik početnog napona). Broj spremnikaenergije određuje red matematičkog sustava, odnosno red diferencijalne jednadžbe štoznači da je RC filtar sustav 1. reda. Ulazna veličina u sustav RC filtra je napon uul(t),a izlazna veličina iz sustava RC filtra je napon uiz(t). Matematički se sustav možezapisati sljedećim diferencijalnim jednadžbama (3.13):
uul(t) = Ri(t) + 1C
∫ t0i(τ)dτ
uiz(t) = 1C
∫ t0i(τ)dτ
(3.13)

3.1 Opis sustava diferencijalnim jednadžbama 27
Nadalje, s obzirom na ulaz i izlaz sustava potrebno je eliminirati struju i(t) (3.14):
uul(t) = Ri(t) + 1C
∫ t0i(τ)dτ ⇒ uul(t) = Ri(t) + uiz(t)
uiz(t) = 1C
∫ t0i(τ)dτ/ d
dt⇒ u′iz(t) = 1
Ci(t)⇒ i(t) = Cu′iz(t)
RCu′iz(t) + uiz(t) = uul(t)⇒ T = RC ⇒ Tu′iz(t) + uiz(t) = uul(t)
(3.14)
Krajnji izraz u (3.14) predstavlja opis sustava RC filtra diferencijalnim jednadžbama.Uz pretpostavku da je ulazni napon jedinična skokovita funkcija, potrebno je naćirješenje sustava (3.15) (nema početnog napona u kondenzator).
Tu′iz(t) + uiz(t) = uul(t)uiz(t) = uizH(t) + uizP (t)uizH(t) = C1e
st
u′izH(t) = sC1est
uizP (t) = K
(3.15)
Uz pretpostavku homogenog i partikularnog rješenja slijedi homogeno rješenje (3.16)
TsC1est + C1e
st = 0Ts+ 1 = 0⇒ s = − 1
T
uizH(t) = C1e− tT
(3.16)
i partikularno rješenje (3.17)
Tu′izP (t) + uizP (t) = uul(t)T · 0 +K = 1K = 1
(3.17)
Rješenje diferencijalne jednadžbe jednako je zbroju homogenog i partikularnogrješenja. Koeficijent C1 se može izračunati iz rješenja diferencijalne jednadžbe uzt = 0(kondenzator je u t = 0 bio potpuno nenabijen).
uiz(t) = 1 + C1e− tT t = 0 ⇒ 0 = 1 + C1 ⇒ C1 = −1
uiz(t) = 1− e− tT
(3.18)
Sljedeći sustav koji ćemo opisati diferencijalnim jednadžbama je RLC krug.
Slika 3.3: RLC krug
Na slici 3.3 prikazan je svima poznat sustav iz elektronike – RLC krug. Sustav imadva spremnika energije (zavojnica - spremnik početne struje i kondenzator - spremnikpočetnog napona) što znači da je RLC krug sustav 2. reda. Ulazna veličina u sustavRLC kruga je napon uul(t), a izlazna veličina iz sustava RLC kruga je napon uiz(t).

28 Matematički modeli kontinuiranih sustava
Matematički se sustav RLC kruga može zapisati sljedećim diferencijalnim jednadžbama(3.19):
uul(t) = Ri(t) + Ldi(t)dt
+ 1C
∫ t0i(τ)dτ
uiz(t) = 1C
∫ t0i(τ)dτ
(3.19)
Nadalje, s obzirom na ulaz i izlaz sustava potrebno je eliminirati struju i(t) (3.20):
uul(t) = Ri(t) + Ldi(t)dt
+ 1C
∫ t0i(τ)dτ ⇒ uul(t) = Ri(t) + Ldi(t)
dt+ uiz(t)
uiz(t) = 1C
∫ t0i(τ)dτ/ d
dt⇒ u′iz(t) = 1
Ci(t)⇒ i(t) = Cu′iz(t)/
ddt⇒ i′(t) = Cu′′iz(t)
uul(t) = RCu′iz(t) + LCu′′iz(t) + uiz(t)LCu′′iz(t) +RCu′iz(t) + uiz(t) = uul(t)
(3.20)Krajnji izraz u (3.20) predstavlja opis sustava RLC kruga diferencijalnim jed-
nadžbama. Radi jednostavnosti neka su vrijednosti električnih komponenata R = 1Ω,L = 1H i C = 1F . Jednadžba (3.20) se sada može napisati kao:
u′′iz(t) + u′iz(t) + uiz(t) = uul(t) (3.21)
Izraz (3.21) predstavlja opis sustava diferencijalnom jednadžbom. Sljedeći tehničkisustav koji ćemo opisati diferencijalnim jednadžbama je rotacijski sustav sa slike 3.4.
Slika 3.4: Rotacijski sustav
Koeficijenti sa slike 3.4 redom su:
• cf1 – koeficijent torzije vratila (osovine), [Nm/rad];
• D1 – prigušenje vratila (osovine), [Nms/rad];
• J1 – moment inercije zamašne mase (zupčanik), [kgm];
• r1 – polumjer zamašne mase (zupčanika),[kg].
Varijable sa slike 3.4 redom su:
• ωu – ulazna brzina vrtnje, [rad/s];
• ω1 – brzina vrtnje zamašne mase, [rad/s];
3.1 Opis sustava diferencijalnim jednadžbama 29
• m1 – moment torzije na vratilu, [Nm];
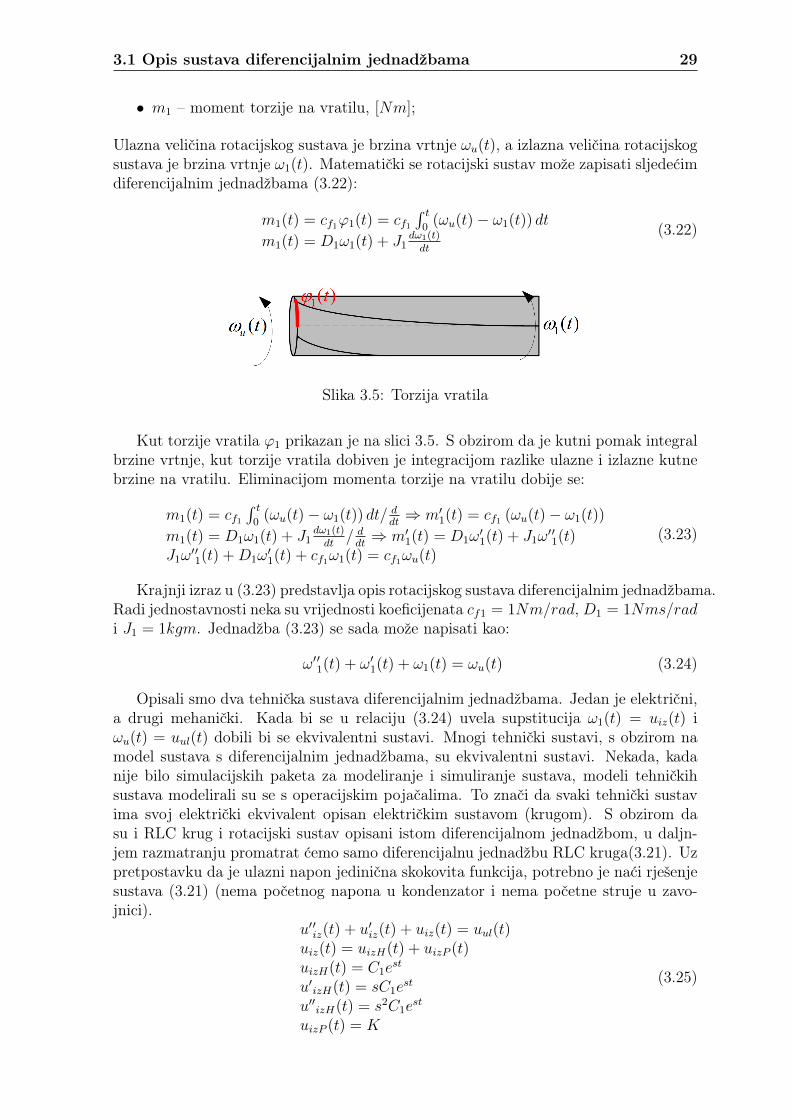
Ulazna veličina rotacijskog sustava je brzina vrtnje ωu(t), a izlazna veličina rotacijskogsustava je brzina vrtnje ω1(t). Matematički se rotacijski sustav može zapisati sljedećimdiferencijalnim jednadžbama (3.22):
m1(t) = cf1ϕ1(t) = cf1∫ t0
(ωu(t)− ω1(t)) dt
m1(t) = D1ω1(t) + J1dω1(t)dt
(3.22)
Slika 3.5: Torzija vratila
Kut torzije vratila ϕ1 prikazan je na slici 3.5. S obzirom da je kutni pomak integralbrzine vrtnje, kut torzije vratila dobiven je integracijom razlike ulazne i izlazne kutnebrzine na vratilu. Eliminacijom momenta torzije na vratilu dobije se:
m1(t) = cf1∫ t0
(ωu(t)− ω1(t)) dt/ddt⇒ m′1(t) = cf1 (ωu(t)− ω1(t))
m1(t) = D1ω1(t) + J1dω1(t)dt
/ ddt⇒ m′1(t) = D1ω
′1(t) + J1ω
′′1(t)
J1ω′′1(t) +D1ω
′1(t) + cf1ω1(t) = cf1ωu(t)
(3.23)
Krajnji izraz u (3.23) predstavlja opis rotacijskog sustava diferencijalnim jednadžbama.Radi jednostavnosti neka su vrijednosti koeficijenata cf1 = 1Nm/rad, D1 = 1Nms/radi J1 = 1kgm. Jednadžba (3.23) se sada može napisati kao:
ω′′1(t) + ω′1(t) + ω1(t) = ωu(t) (3.24)
Opisali smo dva tehnička sustava diferencijalnim jednadžbama. Jedan je električni,a drugi mehanički. Kada bi se u relaciju (3.24) uvela supstitucija ω1(t) = uiz(t) iωu(t) = uul(t) dobili bi se ekvivalentni sustavi. Mnogi tehnički sustavi, s obzirom namodel sustava s diferencijalnim jednadžbama, su ekvivalentni sustavi. Nekada, kadanije bilo simulacijskih paketa za modeliranje i simuliranje sustava, modeli tehničkihsustava modelirali su se s operacijskim pojačalima. To znači da svaki tehnički sustavima svoj električki ekvivalent opisan električkim sustavom (krugom). S obzirom dasu i RLC krug i rotacijski sustav opisani istom diferencijalnom jednadžbom, u daljn-jem razmatranju promatrat ćemo samo diferencijalnu jednadžbu RLC kruga(3.21). Uzpretpostavku da je ulazni napon jedinična skokovita funkcija, potrebno je naći rješenjesustava (3.21) (nema početnog napona u kondenzator i nema početne struje u zavo-jnici).
u′′iz(t) + u′iz(t) + uiz(t) = uul(t)uiz(t) = uizH(t) + uizP (t)uizH(t) = C1e
st
u′izH(t) = sC1est
u′′izH(t) = s2C1est
uizP (t) = K
(3.25)

30 Matematički modeli kontinuiranih sustava
Uz pretpostavku homogenog i partikularnog rješenja slijedi homogeno rješenje (3.26)
s2 + s+ 1 = 0⇒ s1,2 = −1±√12−4
2= −1
2± j
√32
uizH(t) = C1e
(− 1
2+j√3
2
)t+ C2e
(− 1
2−j√32
)t
= C1e− 1
2tej√3
2t + C2e
− 12te−j
√3
2t
uizH(t) = e−12t(C1
(cos
√32t+ j sin
√32t)
+ C2
(cos
√32t− j sin
√32t))
uizH(t) = e−12t(
(C1 + C2) cos√32t+ (C1 − C2) j sin
√32t)∣∣∣A=C1+C2
B=(C1−C2)j
uizH(t) = e−12t(A cos
√32t+B sin
√32t)
(3.26)
i partikularno rješenje (3.27)
u′′izP (t) + u′izP (t) + uizP (t) = uul(t)0 + 0 +K = 1K = 1
(3.27)
Rješenje diferencijalne jednadžbe jednako je zbroju homogenog i partikularnogrješenja. Koeficijenti C1 i C1 mogu se izračunati iz rješenja diferencijalne jednadžbe uzt = 0 (kondenzator u t = 0 ima početni napon jednak nula, a zavojnica u t = 0 imapočetnu struju jednaku nuli). Iz uvjeta da kondenzator u t = 0 ima početni napon0, dobije se uiz(0) = 0. S obzirom da je sustav opisan diferencijalnom jednadžbom2. reda, potrebna su dva početna uvjeta. Drugi početni direktno je vezan za početnustruju zavojnice:
u′iz(t) =1
Ci(t)⇒ u′iz(0) =
1
Ci(0) = 0 (3.28)
Korištenjem početnih uvjeta moguće je dobiti koeficijente C1 i C2:
uiz(t) = 1 + e−12t(A cos
√32t+B sin
√32t)
u′iz(t) = −12e−
12t(A cos
√32t+B sin
√32t)
+ e−12t(−√32A sin
√32t+
√32B cos
√32t)
uiz(0−) = 1 + A = 0⇒ A = −1
u′iz(0−) = −1
2A+
√32B = 0⇒ B = −
√33
(3.29)Konačno rješenje diferencijalne jednadžbe (3.21) je:
uiz(t) = 1− e−12t
(cos
√3
2t+
√3
3sin
√3
2t
)(3.30)
S obzirom da smo zaključili da RLC krug (slika 3.3) i rotacijski sustav (slika 3.4)imaju ekvivalentne diferencijalne jednadžbe, uz pretpostavku da je ulazna brzina vrtnjejedinična stepenica te da su svi početni uvijeti jednaki nuli slijedi:
ω1(t) = 1− e−12t
(cos
√3
2t+
√3
3sin
√3
2t
)(3.31)
3.2 Opis sustava prijenosnom funkcijom u Laplaceovoj domeni 31
3.2 Opis sustava prijenosnom funkcijom u Laplaceovojdomeni
3.2.1 Laplaceova transformacija
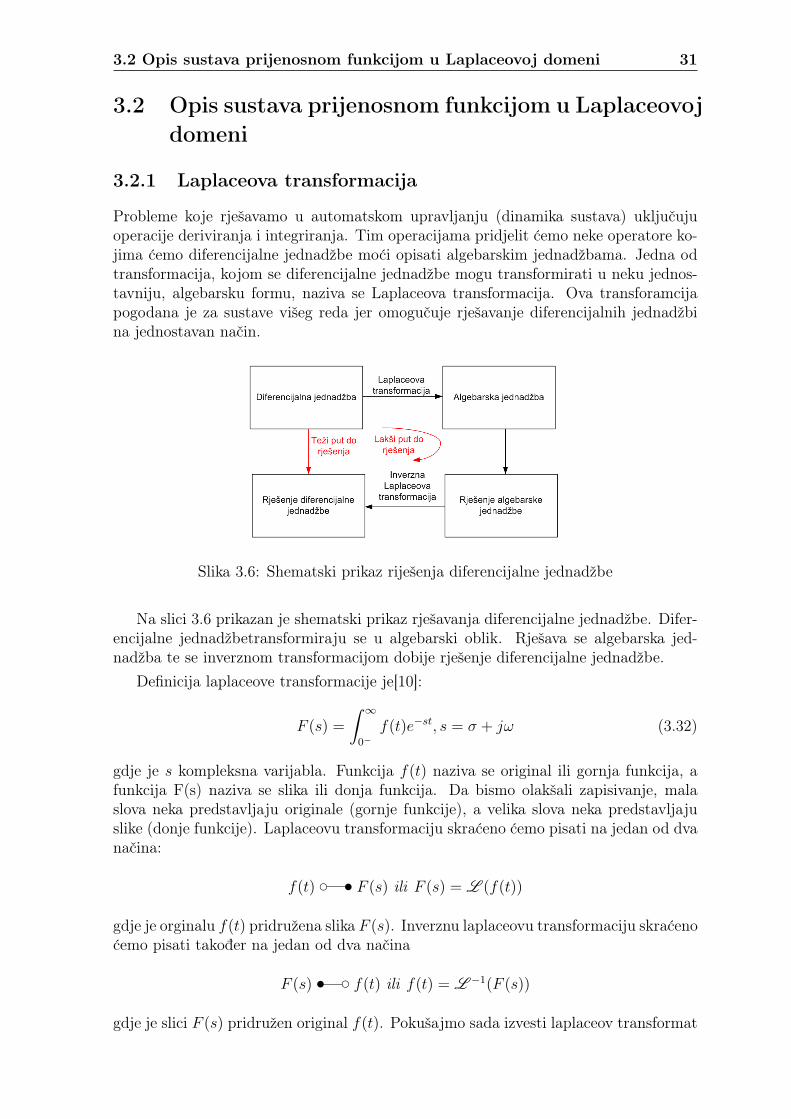
Probleme koje rješavamo u automatskom upravljanju (dinamika sustava) uključujuoperacije deriviranja i integriranja. Tim operacijama pridjelit ćemo neke operatore ko-jima ćemo diferencijalne jednadžbe moći opisati algebarskim jednadžbama. Jedna odtransformacija, kojom se diferencijalne jednadžbe mogu transformirati u neku jednos-tavniju, algebarsku formu, naziva se Laplaceova transformacija. Ova transforamcijapogodana je za sustave višeg reda jer omogučuje rješavanje diferencijalnih jednadžbina jednostavan način.
Slika 3.6: Shematski prikaz riješenja diferencijalne jednadžbe
Na slici 3.6 prikazan je shematski prikaz rješavanja diferencijalne jednadžbe. Difer-encijalne jednadžbetransformiraju se u algebarski oblik. Rješava se algebarska jed-nadžba te se inverznom transformacijom dobije rješenje diferencijalne jednadžbe.
Definicija laplaceove transformacije je[10]:
F (s) =
∫ ∞0−
f(t)e−st, s = σ + jω (3.32)
gdje je s kompleksna varijabla. Funkcija f(t) naziva se original ili gornja funkcija, afunkcija F(s) naziva se slika ili donja funkcija. Da bismo olakšali zapisivanje, malaslova neka predstavljaju originale (gornje funkcije), a velika slova neka predstavljajuslike (donje funkcije). Laplaceovu transformaciju skraćeno ćemo pisati na jedan od dvanačina:
f(t) d tF (s) ili F (s) = L (f(t))
gdje je orginalu f(t) pridružena slika F (s). Inverznu laplaceovu transformaciju skraćenoćemo pisati također na jedan od dva načina
F (s) t df(t) ili f(t) = L −1(F (s))
gdje je slici F (s) pridružen original f(t). Pokušajmo sada izvesti laplaceov transformat

32 Matematički modeli kontinuiranih sustava
za eksponencijalnu funkciju f(t) = e−at (najčešća funkcija):
F (s) =
∫ ∞0−
f(t)e−stdt =
∫ ∞0−
e−ate−stdt =
∫ ∞0−
e−(s+a)tdt
F (s) = − 1
s+ ae−(s+a)t
∣∣∞0
= 0−(− 1
s+ a
)=
1
s+ a
e−at d t 1s+a
(3.33)
Kod sustava koji imaju oscilatorno u odzivu posjeduju kombinacije sinus i kosinusfunkcije. Iz Eulerove formule eiωt = cosωt+ i sinωt i relacije (3.33) slijede transformatiza sinus i kosinus funkcije:
eiωt = cosωt+ i sinωt, e−at = eiωt ⇒ a = −iω
1
s+ a=
1
s− iωs+ iω
s+ iω=
s
s2 + ω2+ i
ω
s2 + ω2
cosωt+ i sinωt d t ss2+ω2 + i ω
s2+ω2
cosωt d t ss2+ω2 , sinωt d t ω
s2+ω2
(3.34)
Odziv nepobuđenog sustava s početnim uvjetima često sadrži jedan od navedenih3 originala (eksponencijalna funkcija, sinus i kosinus). Na slici 3.1 prikazane su nekenajčešće korištene pobude (dirac delta, skokovita pobuda i rampa). Izvod njihovihtransformata prikazan je izrazima (3.35):
delta f(t) = δ(t)
F (s) =
∫ ∞0−
f(t)e−stdt =
∫ ∞0−
δ(t)e−stdt =
∫ ∞0−.
δ(t)dt = 1
step f(t) = µ(t)
F (s) =
∫ ∞0−
f(t)e−stdt =
∫ ∞0−
µ(t)e−stdt =
∫ ∞0−.
e−stdt
F (s) = −1
se−st
∣∣∞0
= 0−(−1
s
)=
1
s
rampa f(t) = t
F (s) =
∫ ∞0−
f(t)e−stdt =
∫ ∞0−
te−stdt =
∫ ∞0−.
e−stdt
∣∣∣∣ u = t dv = e−st
du = 1 v = −1se−st
∣∣∣∣F (s) = −1
ste−st
∣∣∞0
+1
s
∫ ∞0−.
e−stdt = 0 +1
s
(0−
(−1
s
))=
1
s2
δ(t) d t 1 , µ(t) d t 1s, t d t 1
s2
(3.35)
Izveli smo slike najbitnijih originala pobudnih signala koji se pojavljuju u automatskomupravljanju. Odziv sustava na pobudu funkcije dirac delta zove se težinska funkcija ioznačava se s g(t), a odziv sustava na skokovitu pobudu zove se prijelazna funkcija ioznačava se s h(t). Odziv sustava na rampu označavat ćemo s r(t). Sada ćemo pokazatinekoliko svojstava laplaceove transformacije[10]:

3.2 Opis sustava prijenosnom funkcijom u Laplaceovoj domeni 33
Prigušenje originala f(t) Prigušenje originala odgovara pomakom slike ulijevo:
e−atf(t) d t F (s+ a) (3.36)Na primjeru kosinus funkcije dobivamo:
e−3t cosωt d t s+3(s+3)2+ω2 (3.37)
Deriviranje originala f(t) Za deriviranje originala f(t) vrijedi:
f ′(t) d t sF (s)− f(0)
f ′′(t) d t s2F (s)− sf(0)− f ′(0)
.
.
f (n)(t) d t snF (s)− sn−1f(0)− sn−2f ′(0)− ...− f (n−1)(0)
(3.38)
Pokažimo deriviranje signala na primjeru jednostavne diferencijalne jedanadžbe 1.reda:
2y′(t) + 3y(t) = u(t) d t 2 (sY (s)− y(0)) + 3Y (s) = U(s)(2s+ 3)Y (s) = U(s) + 2y(0)
(3.39)
Integriranje originala Ako se original integrira, slika se djeli s kompleksnomvarijablom s. ∫ t
0−f(t)dt d t F (s)
s(3.40)
Pokažimo ovo pravilo na skokovitoj funkciji:∫ t0−µ(t)dt d t 1
s1s
= 1s2
t d t (3.41)
Integriranjem skokovite funkcije dobije se rampa što je i prikazano izrazom (3.41).
Teorem o konačnoj vrijednosti Konačna vrijednost ili stacionarno stanje (ustal-jena vrijednost) odziva može se dobiti sljedećim izrazom:
f(∞) = lims→0
sF (s) (3.42)
Izraz (3.42) biti će primjenjen u zadnjem poglavlju kod proračuna regulacijskog odstu-panja . Tablica osnovnih Laplaceovih transformata nalazi se u poglavlju 7 DODATAK.
Teorem o konvoluciji Konvolucija dvaju originala odgovara umnošku slika:
y(t) = g(t) ∗ u(t) =∫ t0g(τ)u(t− τ)dτ d t Y (s) = G(s)U(s) (3.43)
gdje je y(t) odziv sustava na pobudu u(t), a g(t) težinska funkcija sustava. Na temeljurelacije (3.43) definirajmo sada prijenosnu funkciju sustava kao omjer izlaza i ulazasustava u laplaceovoj domeni:
G(s) =Y (s)
U(s)(3.44)
Relacija (3.44) predstavlja matematički model sustava u laplaceovoj domeni. Izlazsustava (3.43) u lalacovoj domeni potrebno je transformirati u vremensku domenu.Potrebno je napraviti inverznu laplaceovu transformaciju.

34 Matematički modeli kontinuiranih sustava
3.2.2 Inverzna laplaceova transformacija
Da bi dobili rješenje diferencijalne jednadžbe potrebno je algebarski izraz dobivenlaplaceovom transformacijom transformirati u pogodan oblik za inverznu laplaceovutransformaciju. Ako je F (s) slika originala f(t) tada je i f(t) original slike F (s).Već na temelju predhodne definicije možemo zaključiti da je algebarski izraz potrebnorazlomiti na takve slike čije originale poznamo ili ih možemo pronaći u tablicama.Problem inverzne laplaceove transformacije znatno je složeniji od problema laplaceovetransformacije. Za sada bi znali napraviti inverznu laplaceovu transformaciju za nekejednostavne primjere:
s+4s2+25
= ss2+52
+ 4s2+52
= ss2+52
+4 55
s2+52t d cos 5t+ 4
5sin 5t
ss+1
= s+1−1s+1
= 1− 1s+1
t d δ(t)− e−t1
s2+2s+2= 1
(s+1)2+1t d e−t sin t
(3.45)
Prvi izraz u (3.45) predstavlja zbroj i sinusa i kosinusa. Potrebno je samo odreditifrekvenciju signala ω i prema prema relaciji (3.34) napraviti inverznu laplaceovu trans-formaciju. U drugom izrazu u (3.45) potrebno je dodati i oduzeti 1 kako ne bi narušilialgebarsku jednadžbu. Koristeći relacije (3.33) i (3.35) mogu se odrediti originali. Trećiizraz u (3.45) je nešto složeniji. Ako nazivnik ima kompleksne korijene (nultočke), tadaje potrebno nazivnik svesti na potpuni kvadrat. Koristeći svojstvo prigušenja originala(3.36), može se zaključiti da je slika trećeg izraza zapravo prigušena sinus funkcija. Uslučaju da je potrebno naći inverz slike:
G(s) =1
s(s+ 1)(s+ 2)(s+ 3)(3.46)
više ne možemo pristupiti problemu kao kod relacije (3.45). Neka je težinska funkcija(odziv sustava na dirac delta funkciju) sustava u laplaceovoj domeni predstavljen kaoracionalna funkcija:
G(s) =P (s)
Q(s)=bms
m + bm−1sm−1 + ...+ b1s+ b0
ansn + an−1sn−1 + ...+ a1s+ a0, n > m (3.47)
Racionalnu funkciju (3.47) potrebno je rastaviti na proste razlomke. Ovaj problemje posebno jednostavan ukoliko su sve nultočke polinoma nazivnika Q(s) realne i jed-nostruke. Ako je sustav pobuđen dirac delta funkcijom tada se u laplaceovoj domenikao odziv dobije prijenosna funkcija. Nultočke polinoma nazivnika Q(s) prijenosnefunkcije predstavljaju polove 5 sustava (označavat ćemo ih s pi), a nultočke polinomabrojnika P (s) prijenosne funkcije predstavljaju nule sustava (označavat ćemo ih s ni).U nastavku teksta koristit ćemo samo termine nula i polova sustava. Ako su poloviprijenosne funkcije (3.47) jednostruki i realni tada se racionalna prijenosna funkcijaG(s) = P (s)/Q(s) može napisati u obliku (broj polova jednak je redu prijenosnefunkcije; red prijenosne funkcije određen je redom polinoma Q(s) uz pretpostavkukauzalnog sustava6):
G(s) =P (s)
Q(s)=
K1
s− p1+
K2
s− p2+ ...
Kn
s− pn(3.48)
5Položaj polova bitan je kod stabilnosti sustava, vidjeti poglavlje o stabilnosti6Sustav će biti kauzalan ako je red brojnika prijenosne funkcije manji ili jednak redu nazivnika
prijenosne funkcije

3.2 Opis sustava prijenosnom funkcijom u Laplaceovoj domeni 35
Inverzne transformacije razlomljene racionalne funkcijeG(s) su eksponencijalne funkcije:
g(t) = K1ep1t +K2e
p2t + ...+Knepnt (3.49)
Koeficijenti K1, K2, ..., Kn mogu se dobiti prema sljedećoj relaciji:
Kk = lims→pk
P (s)(s− pk)Q(s)
, k = 1...n (3.50)
Ovakav razvoj racionalne funkcije na proste razlomke u literaturi se nazivaHeavisideovrazvoj[10]. To je samo jedan od načina kako se mogu odrediti koeficijentiK1, K2, ..., Kn.Sljedeći način temelji se na izjednačavanju koeficijenata uz potencije kompleksne vari-jable s:
P (s)
Q(s)=bms
m + bm−1sm−1 + ...+ b1s+ b0
ansn + an−1sn−1 + ...+ a1s+ a0=
K1
s− p1+
K2
s− p2+ ...+
Kn
s− pnbms
m + bm−1sm−1 + ...+ b1s+ b0
(s− p1) (s− p2) · · · (s− pn)=
K1
s− p1+ ...+
Kn
s− pn/ (s− p1) · · · (s− pn)
bmsm + ...+ b1s+ b0 = K1 (s− p2) · · · (s− pn) + ...+Kn (s− p1) · · · (s− pn−1)
(3.51)Ako G(s) ima kompleksne polove tada se racionalna funkcija rastavlja kao (p1,2 =−σ ∓ jω):
P (s)
Q(s)=bms
m + bm−1sm−1 + ...+ b1s+ b0
ansn + an−1sn−1 + ...+ a1s+ a0=
K1 +K2s
(s+ σ + jω)(s+ σ − jω)+ ...+
Kn
s− pn(3.52)
Ako G(s) ima dvostruke polove tada se racionalna funkcija rastavlja kao (Za pro-račun koeficijenata u ovom slučaju preporuča se drugi način):
P (s)
Q(s)=bms
m + bm−1sm−1 + ...+ b1s+ b0
ansn + an−1sn−1 + ...+ a1s+ a0=
K1
s− p1+
K2
(s− p1)2+ ...+
Kn
s− pn(3.53)
Istom analogijom može se napraviti rastav funkcije za trostruke, četverostruke i višestrukepolove. Pokušajmo sada problem (3.45) rješiti na oba načina. Polovi sustava su redomp1 = 0, p2 = 1, p3 = 2, p4 = 3.

36 Matematički modeli kontinuiranih sustava
Prvi način
G(s) =1
s(s+ 1)(s+ 2)(s+ 3)=A
s+
B
s+ 1+
C
s+ 2+
D
s+ 3
A = lims→0
s
s(s+ 1)(s+ 2)(s+ 3)= lim
s→0
1
(s+ 1)(s+ 2)(s+ 3)=
1
6
B = lims→−1
s+ 1
s(s+ 1)(s+ 2)(s+ 3)= lim
s→−1
1
s(s+ 2)(s+ 3)=−1
2
C = lims→−2
s+ 2
s(s+ 1)(s+ 2)(s+ 3)= lim
s→−2
1
s(s+ 1)(s+ 3)=
1
2
D = lims→−3
s+ 3
s(s+ 1)(s+ 2)(s+ 3)= lim
s→−3
1
s(s+ 1)(s+ 2)=−1
6
G(s) =1/6
s− 1/2
s+ 1+
1/2
s+ 2− 1/6
s+ 3
g(t) =1
6− 1
2e−t +
1
2e−2t +
1
6e−3t
(3.54)
Drugi način
G(s) =1
s(s+ 1)(s+ 2)(s+ 3)=A
s+
B
s+ 1+
C
s+ 2+
D
s+ 3/s(s+ 1)(s+ 2)(s+ 3)
1 = A(s+ 1)(s+ 2)(s+ 3) +Bs(s+ 2)(s+ 3) + Cs(s+ 1)(s+ 3)+
+Ds(s+ 1)(s+ 2)
1 = A(s3 + 6s2 + 11s+ 6) +B(s3 + 5s2 + 6s) + C(s3 + 4s2 + 3s)+
D(s3 + 2s2 + 2s)
1 = 6A
0 = 11A+ 6B + 3C + 2D
0 = 6A+ 5B + 4C + 2D
0 = A+B + C +D
A =1
6, B =
−1
2, C =
1
2, D =
−1
6
G(s) =1/6
s− 1/2
s+ 1+
1/2
s+ 2− 1/6
s+ 3
g(t) =1
6− 1
2e−t +
1
2e−2t +
1
6e−3t
(3.55)Ovime je završen opis Laplaceove transformacije. S obzirom da nam je glavni cilj bio
pojednostavljenje rješavanja diferencijalnih jednadžbi i jednostavniji proračun odzivasustava, Laplaceovu transformaciju moguće je primjeniti na sustave RC i RLC kruga.Najprije ćemo transformaciju primjeniti na RC filtru. Relaciju (3.14) moguće je sada

3.2 Opis sustava prijenosnom funkcijom u Laplaceovoj domeni 37
zapisati u Laplaceovoj domeni:
uul(t) = Ri(t) +1
C
∫ t
0
i(τ)dτ d t UUL(s) = RI(s) +1
sCI(s) =
(R +
1
sC
)I(s)
uiz(t) =1
C
∫ t
0
i(τ)dτ d t UIZ(s) =1
sCI(s)
(3.56)Prijenosna funkcija sustava definirana je kao omjer izlaza i ulaza sustava u Laplaceovoj
domeni:
G(s) =Uiz(s)
Uul(s)=
1sCI(s)(
R + 1sC
)I(s)
=1
RCs+ 1=
1
Ts+ 1(3.57)
Isto bi se rješenje dobilo ako bi se Laplaceova transformacija primijenila na difer-encijalnu jednadžbu sustava (3.14).
RCu′iz(t) + uiz(t) = uul(t) d t (RCs+ 1)UIZ(s) = UUL(s)/UUL(s)/ (RCs+ 1)
G(s) =UIZ(s)
UUL(s)=
1
RCs+ 1=
1
Ts+ 1(3.58)
S obzirom da je ulazni napon jednak jediničnoj stepenici (1/s u Laplaceovoj domeni),odziv sustava moguće je riješiti uz pomoć tablice Laplaceovih transformacija u poglavlju7 DODATAK na sljedeći način:
UIZ(s) = G(s)UUL(s) =1
Ts+ 1
1
s
UIZ(s) =1
Ts+ 1
1
s=
A
Ts+ 1+B
s/(Ts+ 1)s
As+B(Ts+ 1) = 1
B = 1, A+BT = 0⇒ A = −T
UIZ(s) =1
s+−T/ : T
Ts+ 1/ : T=
1
s− 1
s+ 1T
t d uiz(t) = 1− e−tT
(3.59)
Prijenosna funkcija dobivena relacijom (3.57) naziva se PT1 član, odnosno propor-cionalni član s jednom vremenskom konstantom. Radi jednostavnosti pretpostavimoda je T = RC = 1s.
38 Matematički modeli kontinuiranih sustava
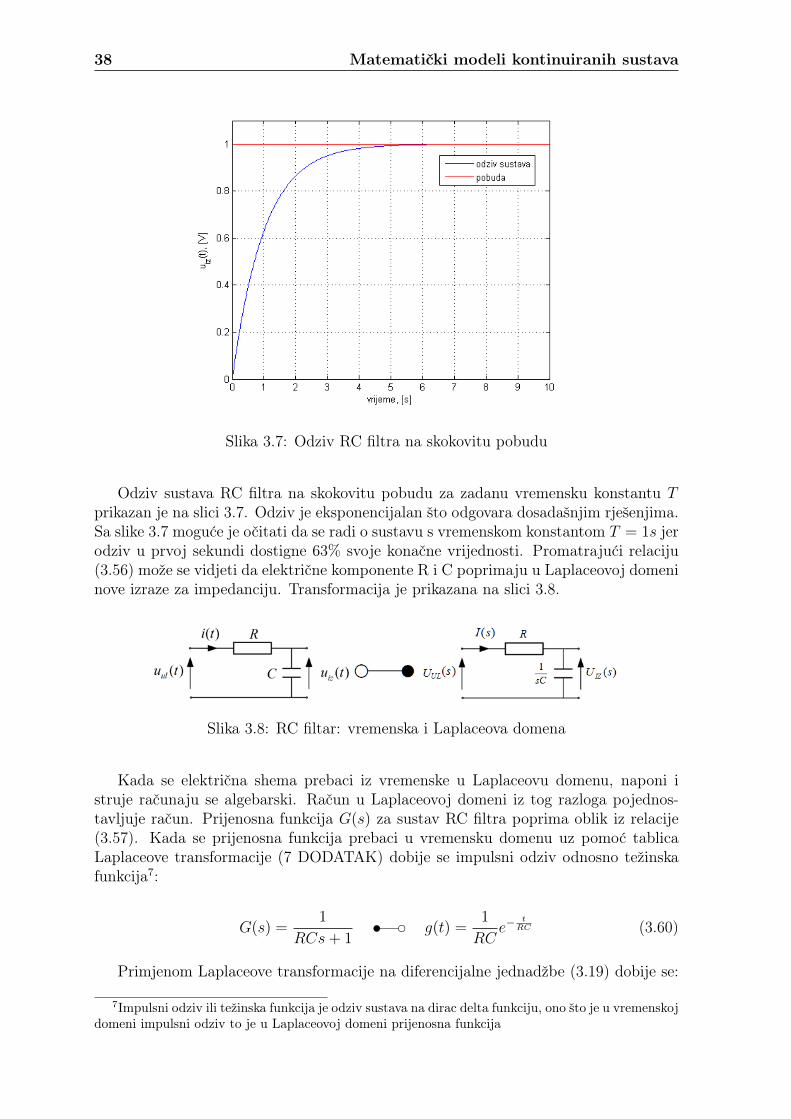
Slika 3.7: Odziv RC filtra na skokovitu pobudu
Odziv sustava RC filtra na skokovitu pobudu za zadanu vremensku konstantu Tprikazan je na slici 3.7. Odziv je eksponencijalan što odgovara dosadašnjim rješenjima.Sa slike 3.7 moguće je očitati da se radi o sustavu s vremenskom konstantom T = 1s jerodziv u prvoj sekundi dostigne 63% svoje konačne vrijednosti. Promatrajući relaciju(3.56) može se vidjeti da električne komponente R i C poprimaju u Laplaceovoj domeninove izraze za impedanciju. Transformacija je prikazana na slici 3.8.
Slika 3.8: RC filtar: vremenska i Laplaceova domena
Kada se električna shema prebaci iz vremenske u Laplaceovu domenu, naponi istruje računaju se algebarski. Račun u Laplaceovoj domeni iz tog razloga pojednos-tavljuje račun. Prijenosna funkcija G(s) za sustav RC filtra poprima oblik iz relacije(3.57). Kada se prijenosna funkcija prebaci u vremensku domenu uz pomoć tablicaLaplaceove transformacije (7 DODATAK) dobije se impulsni odziv odnosno težinskafunkcija7:
G(s) =1
RCs+ 1t d g(t) =
1
RCe−
tRC (3.60)
Primjenom Laplaceove transformacije na diferencijalne jednadžbe (3.19) dobije se:
7Impulsni odziv ili težinska funkcija je odziv sustava na dirac delta funkciju, ono što je u vremenskojdomeni impulsni odziv to je u Laplaceovoj domeni prijenosna funkcija

3.2 Opis sustava prijenosnom funkcijom u Laplaceovoj domeni 39
uul(t) = Ri(t) + Ldi(t)
dt+
1
C
∫ t
0
i(τ)dτ d t UUL(s) =
(R + sL+
1
sC
)I(s)
uiz(t) =1
C
∫ t
0
i(τ)dτ d t UIZ(s)1
sCI(s)
(3.61)Prijenosna funkcija definirana je kao omjer izlaza i ulaza sustava u Laplaceovoj
domeni:
G(s) =UIZ(s)
UUL(s)=
1sCI(s)
R + sL+ 1sC
=1
LCs2 +RCs+ 1(3.62)
Isto bi se rješenje dobilo ako bi se Laplaceova transformacija primijenila na difer-encijalnu jednadžbu (3.21):
LCu′′iz(t) +RCu′iz(t) + uiz(t) = uul(t) d t (LCs2 +RCs+ 1
)UIZ(s) = UUL(s)
G(s) =UIZ(s)
UUL(s)=
1
LCs2 +RCs+ 1(3.63)
S obzirom da je ulazni napon jednak jediničnoj stepenici (1/s u Laplaceovoj domeni),odziv sustava moguće je riješiti uz pomoć tablice Laplaceovih transformacija u poglavlju7 DODATAK na sljedeći način ( radi jednostavnosti neka su vrijednosti električnihkomponenata R = 1Ω, L = 1H i C = 1F ):
UIZ(s) = G(s)UUL(s) =1
s2 + s+ 1
1
s=
1
s2 + s+ 14
+ 34
1
s
UIZ(s) =1(
s+ 12
)2+ 3
4
1
s=
A+Bs(s+ 1
2
)2+ 3
4
+C
s
As+Bs2 + C(s2 + s+ 1
)= 1
C = 1
A+ C = 0⇒ A = −1
B + C = 0⇒ B = −1
UIZ(s) =1
s− 1 + s(
s+ 12
)2+ 3
4
=1
s−
12
+(s+ 1
2
)(s+ 1
2
)2+ 3
4
UIZ(s) =1
s−
s+ 12(
s+ 12
)2+ 3
4
−12
√32
2√3(
s+ 12
)2+ 3
4
uiz(t) = 1− e−12t
(cos
√3
2t+
√3
3sin
√3
2t
)
(3.64)
Prijenosna funkcija dobivena relacijeom (3.63) naziva se PT2S član. To je propor-cionalni član 2. reda s nadvišenjem8.
8Prebačaj preko vrijednosti u stacionarnom stanju
40 Matematički modeli kontinuiranih sustava
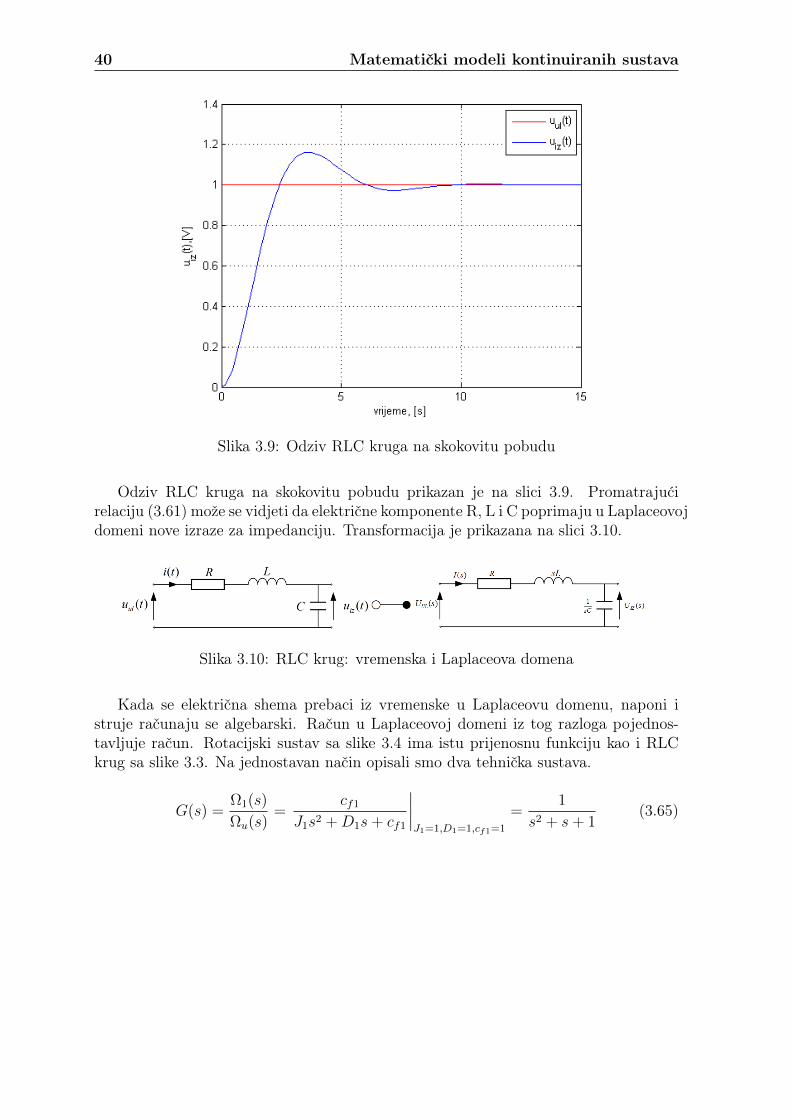
Slika 3.9: Odziv RLC kruga na skokovitu pobudu
Odziv RLC kruga na skokovitu pobudu prikazan je na slici 3.9. Promatrajućirelaciju (3.61) može se vidjeti da električne komponente R, L i C poprimaju u Laplaceovojdomeni nove izraze za impedanciju. Transformacija je prikazana na slici 3.10.
Slika 3.10: RLC krug: vremenska i Laplaceova domena
Kada se električna shema prebaci iz vremenske u Laplaceovu domenu, naponi istruje računaju se algebarski. Račun u Laplaceovoj domeni iz tog razloga pojednos-tavljuje račun. Rotacijski sustav sa slike 3.4 ima istu prijenosnu funkciju kao i RLCkrug sa slike 3.3. Na jednostavan način opisali smo dva tehnička sustava.
G(s) =Ω1(s)
Ωu(s)=
cf1J1s2 +D1s+ cf1
∣∣∣∣J1=1,D1=1,cf1=1
=1
s2 + s+ 1(3.65)

3.3 Opis sustava varijablama stanja 41
3.3 Opis sustava varijablama stanja
Varijable stanja definiramo kao minimalni broj unutrašnjih varijabli sustava kojimamožemo u potpunosti opisati ponašanje sustava. Kod opisa sustava diferencijalnimjednadžbama i prijenosnom funkcijom rečeno je da je red sustava jednak redu diferen-cijalne jednadžbe ili redu prijenosne funkcije. Prema tome, broj varijabli stanja jednakje redu diferencijalne jednadžbe ili redu prijenosne funkcije što odgovara broju sprem-nika energije u sustavu . Opis sustava jednadžbama varijabli stanja sastoji se u tomeda se ponašanje dinamičkog sustava umjesto diferencijalnom jednadžbom n-tog reda,prikaže sustavom od n diferencijalnih jednadžbi prvog reda[11]. Linearni i vremenskinepromjenjivi sustavi mogu se opisati matričnim oblikom:
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)(3.66)
gdje su:
• A - matrica sustava (dimenzije n x n)
• B - ulazna matrica (dimenzije n x p)
• C - izlazna matrica (dimenzije r x n)
• D - matrica direktnog preslikavanja ulaza na izlaz (dimenzije r x p)
gdje je n red sustava, p broj ulaza, a r broj izlaza sustava. Na ovaj način opisuju se iSISO9 i MIMO10 sustavi.
Slika 3.11: Opis sustava varijablama stanja
Opis sustava varijablama stanja prikazan je slikom 3.11. Slika je direktno dobivenaiz relacije (3.66) i nacrtana je u matričnom obliku. Primjenom laplaceove transforma-cije na relaciju (3.66) dobije se opis sustava varijablama stanja u laplaceovoj domeni:
sX(s) = AX(s) + BU(s)
Y(s) = CX(s) + DU(s)(3.67)
9Single Input and Single Output10Multiple Input and Multiple Output

42 Matematički modeli kontinuiranih sustava
Prijenosna funkcija definirana je kao omjer izlaza i ulaza sustava pa iz relacije (3.67)slijedi:
(Is−A)−1\(Is−A)X(s) = BU(s)⇒X(s) = (Is−A)−1BU(s)
Y(s) = C(Is−A)−1BU(s) + DU(s)
G(s) =Y(s)
U(s)= C(Is−A)−1B + D
(3.68)
U prvoj iteraciji izvoda prijenosne funkcije prvi izraz iz (3.67) množili smo s lijeva(matrično množenje). Dalje se izvod svodi na uvrštavanje varijabli. Pokušajmo sadajedan jednostavan sustav opisati varijablama stanja. Sustav je opisan diferencijalnomjednadžbom:
y′′′(t) + 2y′′(t) + 3y′(t) + 4y(t) = u(t) (3.69)
Odaberimo sljedeće varijable stanja (s obzirom da je diferencijalna jednadžba trećegreda, broj varijabli stanja biti će tri):
x1(t) = y(t)
x2(t) = y′(t)
x3(t) = y′′(t)
(3.70)
Prema relaciji 3.66 potrebne su nam i derivacije varijebli stanja:
x1′(t) = y′(t)
x2′(t) = y′′(t)
x3′(t) = y′′′(t)
(3.71)
Potrebno je odrediti sadržaj matrica A,B,C i D.
y′′′(t) = u(t)− 2y′′(t)− 3y′(t)− 4y(t)
x1′(t) = y′(t) = x2(t)
x2′(t) = y′′(t) = x3(t)
y′′′(t) = u(t)− 2y′′(t)− 3y′(t)− 4y(t)
y′′′(t) = u(t)− 2x3(t)− 3x2(t)− 4x1(t)
x3′(t) = y′′′(t) = u(t)− 2x3(t)− 3x2(t)− 4x1(t)
(3.72)
Koristeći relacije (3.70) i (3.71) i njihovom supstitucijom u diferencijalnu jednadžbu(3.69) dobiven je sustav opisan varijablama stanja (3.72). Potrebno ga je samo opisatiu obliku matrica: x1
′(t)x2′(t)
x3′(t)
=
0 1 00 0 1−4 −3 −2
x1(t)x2(t)x3(t)
+
001
u(t)
y(t) =[
1 0 0] x1(t)
x2(t)x3(t)
+ 0u(t)
A =
0 1 00 0 1−4 −3 −2
,B =
001
,C =[
1 0 0].D = 0
(3.73)

3.3 Opis sustava varijablama stanja 43
Pokušajmo sada sustav RLC kruga zapisati u obliku varijabli stanja. RLC krugopisan je diferencijalnom jednadžbom (3.20):
LCu′′iz(t) +RCu′iz(t) + uiz(t) = uul(t) (3.74)
Kao varijable stanja uzmimo sada fizikalne veličine; struju i(t) i napon uC :
uc(t) = uiz(t)
i(t) = Cu′iz(t)
u′c(t) = u′iz(t) =1
Ci(t)
i′(t) = Cu′′iz(t)
LCu′′iz(t) +RCu′iz(t) + uiz(t) = uul(t)/L
Cu′′iz(t) +RC
Lu′iz(t) +
1
Luiz(t) =
1
Luul(t)
Cu′′iz(t) =1
Luul(t)−
R
Li(t)− 1
Luc(t)
i′(t) =1
Luul(t)−
R
Li(t)− 1
Luc(t)[
u′c(t)i′(t)
]=
[0 1
C
− 1L−RL
] [uc(t)i(t)
]+
[01L
]uul(t)
uiz(t) =[
1 0] [ uc(t)
i(t)
]A =
[0 1
C
− 1L−RL
],B =
[01L
],C =
[1 0
].D = 0
(3.75)
Relacijom (3.76) prikazan je sustav RLC kruga varijablama stanja. Prijenosnafunkcija RLC kruga može se dobiti laplasovom transformacijom relacije (3.74).
LCu′′iz(t) +RCu′iz(t) + uiz(t) = uul(t)
(LCs2 +RCs+ 1
)UIZ(s) = UUL(s)⇒
G(s) =UIZ(s)
UUL(s)=
1
LCs2 +RCs+ 1
(3.76)
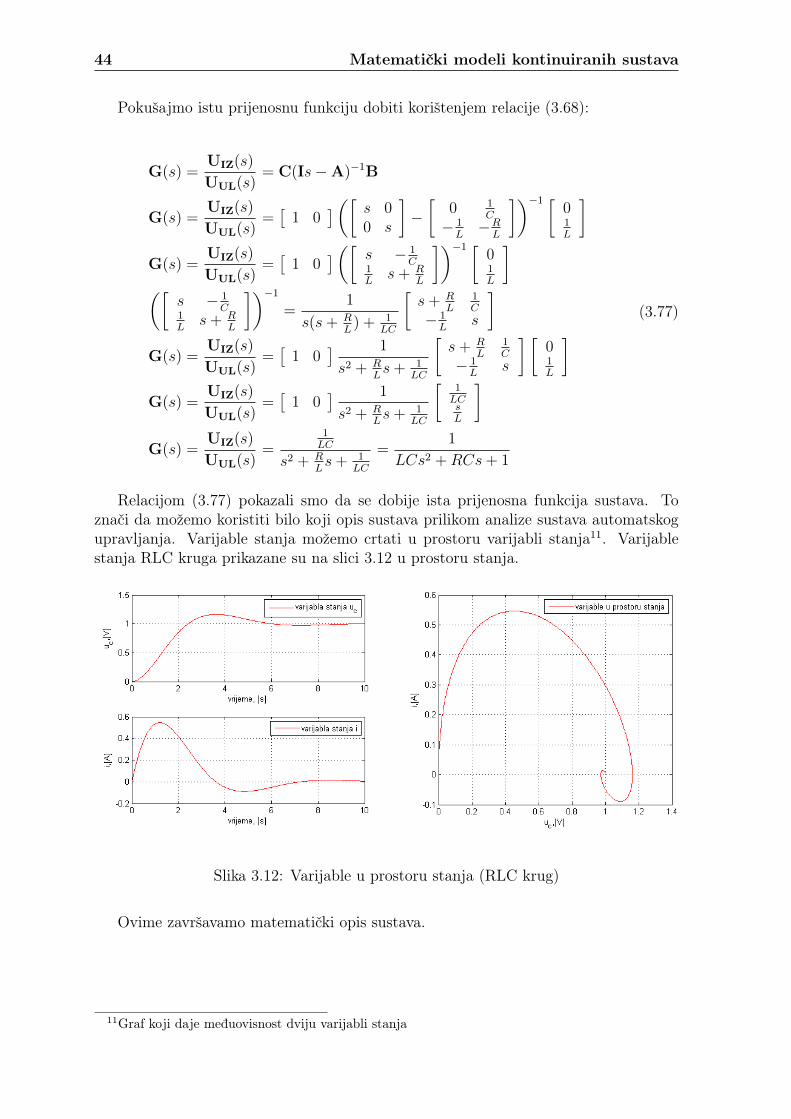
44 Matematički modeli kontinuiranih sustava
Pokušajmo istu prijenosnu funkciju dobiti korištenjem relacije (3.68):
G(s) =UIZ(s)
UUL(s)= C(Is−A)−1B
G(s) =UIZ(s)
UUL(s)=[
1 0]([ s 0
0 s
]−[
0 1C
− 1L−RL
])−1 [01L
]G(s) =
UIZ(s)
UUL(s)=[
1 0]([ s − 1
C1L
s+ RL
])−1 [01L
]([
s − 1C
1L
s+ RL
])−1=
1
s(s+ RL
) + 1LC
[s+ R
L1C
− 1L
s
]G(s) =
UIZ(s)
UUL(s)=[
1 0] 1
s2 + RLs+ 1
LC
[s+ R
L1C
− 1L
s
] [01L
]G(s) =
UIZ(s)
UUL(s)=[
1 0] 1
s2 + RLs+ 1
LC
[1LCsL
]G(s) =
UIZ(s)
UUL(s)=
1LC
s2 + RLs+ 1
LC
=1
LCs2 +RCs+ 1
(3.77)
Relacijom (3.77) pokazali smo da se dobije ista prijenosna funkcija sustava. Toznači da možemo koristiti bilo koji opis sustava prilikom analize sustava automatskogupravljanja. Varijable stanja možemo crtati u prostoru varijabli stanja11. Varijablestanja RLC kruga prikazane su na slici 3.12 u prostoru stanja.
Slika 3.12: Varijable u prostoru stanja (RLC krug)
Ovime završavamo matematički opis sustava.
11Graf koji daje međuovisnost dviju varijabli stanja
Poglavlje 4
Vremenski odziv osnovnih dinamičkihčlanova
Složeniji tehnički sustavi koji sadrže mjerne članove, aktuatore (pojačala snage) irazne sustavne cjeline, u opisu sustava, često se razlažu na podsustave. Svaki pod-sustav može se opisati s nekim dinamičkim članom. Dinamičke članove opisat ćemo unastavku. Osnovni dinamički članovi su:
• Proporcionalni član nultog reda (P0 član)
• Proporcionalni član prvog reda (PT1 član)
• Proporcionalni član drugog reda (PT2 član)
• Proporcionalni član drugog reda s prigušenim oscilatornim ponašanjem (PT2Sčlan)
• Derivacijski član (D član)
• Integralni član (I član)
• Član s transportnim kašnjenjem
Kombinacijom osnovnih dinamičkih članova moguće je opisati sve linearne sustave. Udaljnjim izlaganjima ulaz u sustav označavat ćemo s u(t), a izlaz sustava s y(t).
4.1 Odziv sustava s obzirom na položaj polova
Kod inverzne Laplaceove transformacije spomenuli smo polove i nule sustava. Polovisustava su nultočke nazivnika prijenosne funkcije. Kompleksna varijabla s definiranaje kao s = σ + jω. Položaj polova može se nacrtati u s - ravnini gdje se na os apscisucrta realni dio kompleksne varijable s (σ), a na osi ordinata imaginarni dio kompleksnevarijable s (ω). S ravnina prikazana je na slici 4.1. Polovi se označavaju s križićem x.Ako su svi polovi sustava u lijevoj poluravnini s-ravnine (sivo oznaćeno na slici 4.1)odziv sustava biti će stabilan. Ako je samo jedan pol u desnom djelu s-ravnine, odzivsustava će se raspirivati (težiti u beskonačno) (slika 4.2 dolje). Ako polovi imaju irealnu i imaginarnu komponentu tada će sustav imati prigušeni oscilatoran odziv (slika
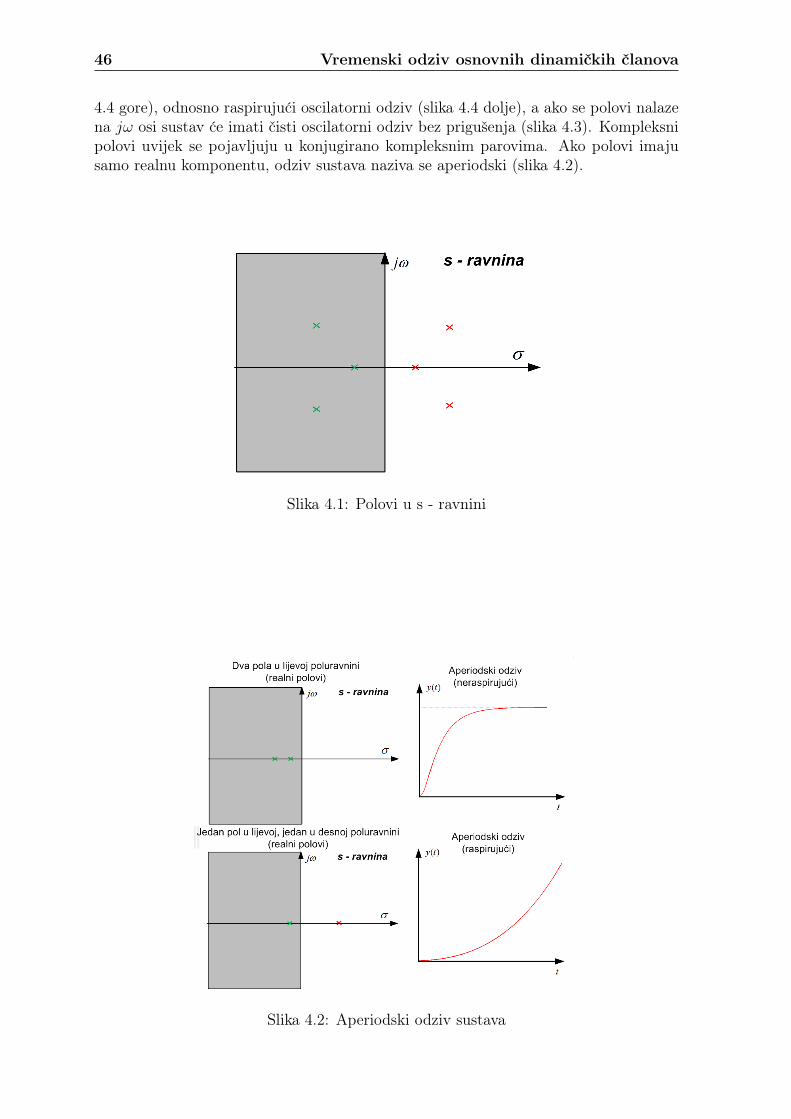
46 Vremenski odziv osnovnih dinamičkih članova
4.4 gore), odnosno raspirujući oscilatorni odziv (slika 4.4 dolje), a ako se polovi nalazena jω osi sustav će imati čisti oscilatorni odziv bez prigušenja (slika 4.3). Kompleksnipolovi uvijek se pojavljuju u konjugirano kompleksnim parovima. Ako polovi imajusamo realnu komponentu, odziv sustava naziva se aperiodski (slika 4.2).
Slika 4.1: Polovi u s - ravnini
Slika 4.2: Aperiodski odziv sustava
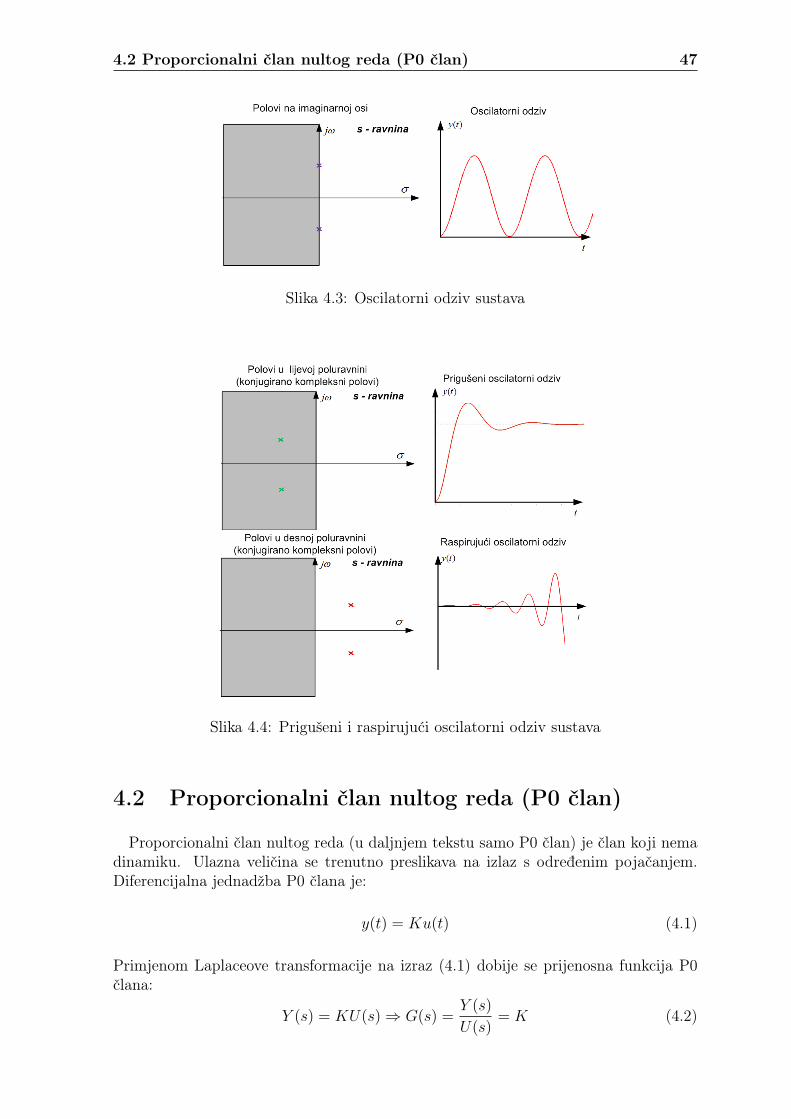
4.2 Proporcionalni član nultog reda (P0 član) 47
Slika 4.3: Oscilatorni odziv sustava
Slika 4.4: Prigušeni i raspirujući oscilatorni odziv sustava
4.2 Proporcionalni član nultog reda (P0 član)
Proporcionalni član nultog reda (u daljnjem tekstu samo P0 član) je član koji nemadinamiku. Ulazna veličina se trenutno preslikava na izlaz s određenim pojačanjem.Diferencijalna jednadžba P0 člana je:
y(t) = Ku(t) (4.1)
Primjenom Laplaceove transformacije na izraz (4.1) dobije se prijenosna funkcija P0člana:
Y (s) = KU(s)⇒ G(s) =Y (s)
U(s)= K (4.2)
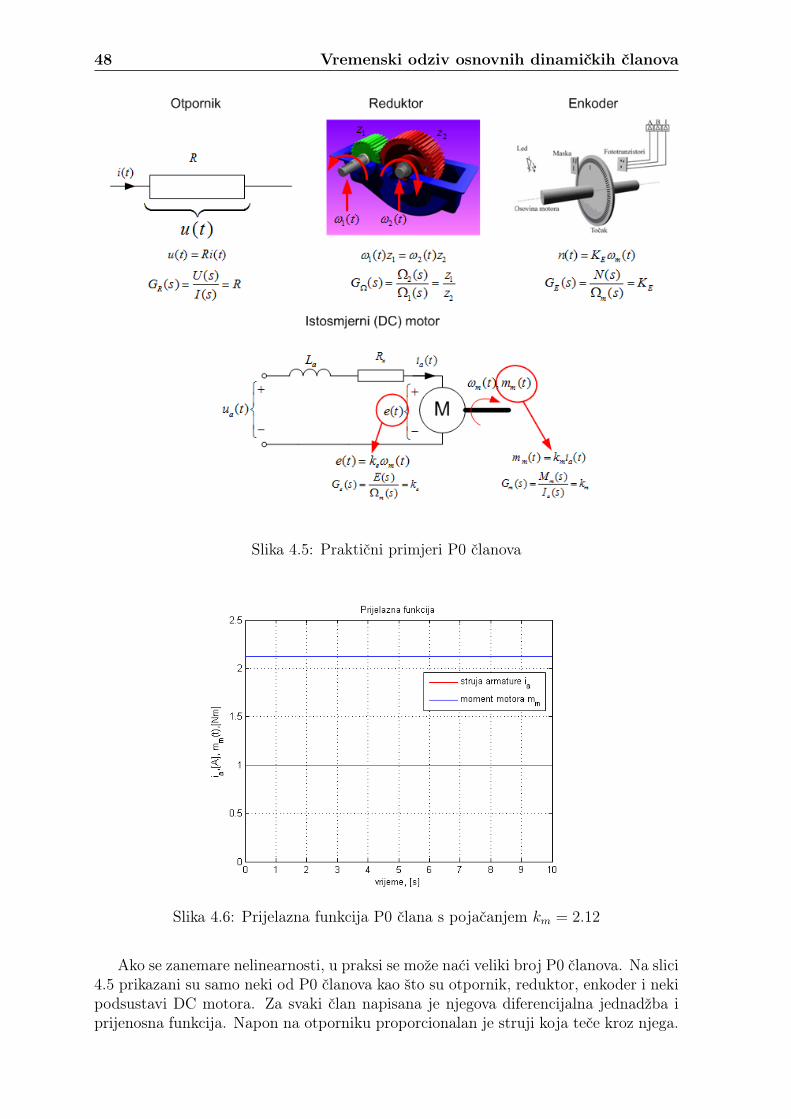
48 Vremenski odziv osnovnih dinamičkih članova
Slika 4.5: Praktični primjeri P0 članova
Slika 4.6: Prijelazna funkcija P0 člana s pojačanjem km = 2.12
Ako se zanemare nelinearnosti, u praksi se može naći veliki broj P0 članova. Na slici4.5 prikazani su samo neki od P0 članova kao što su otpornik, reduktor, enkoder i nekipodsustavi DC motora. Za svaki član napisana je njegova diferencijalna jednadžba iprijenosna funkcija. Napon na otporniku proporcionalan je struji koja teče kroz njega.
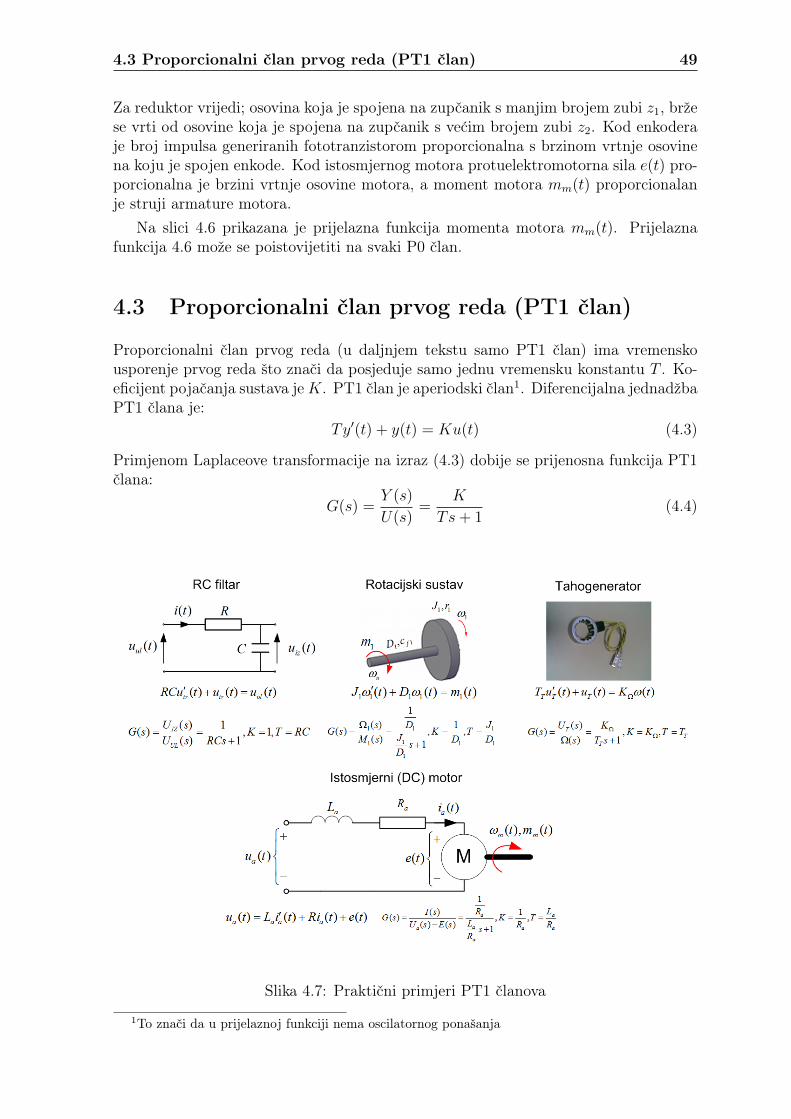
4.3 Proporcionalni član prvog reda (PT1 član) 49
Za reduktor vrijedi; osovina koja je spojena na zupčanik s manjim brojem zubi z1, bržese vrti od osovine koja je spojena na zupčanik s većim brojem zubi z2. Kod enkoderaje broj impulsa generiranih fototranzistorom proporcionalna s brzinom vrtnje osovinena koju je spojen enkode. Kod istosmjernog motora protuelektromotorna sila e(t) pro-porcionalna je brzini vrtnje osovine motora, a moment motora mm(t) proporcionalanje struji armature motora.
Na slici 4.6 prikazana je prijelazna funkcija momenta motora mm(t). Prijelaznafunkcija 4.6 može se poistovijetiti na svaki P0 član.
4.3 Proporcionalni član prvog reda (PT1 član)
Proporcionalni član prvog reda (u daljnjem tekstu samo PT1 član) ima vremenskousporenje prvog reda što znači da posjeduje samo jednu vremensku konstantu T . Ko-eficijent pojačanja sustava jeK. PT1 član je aperiodski član1. Diferencijalna jednadžbaPT1 člana je:
Ty′(t) + y(t) = Ku(t) (4.3)
Primjenom Laplaceove transformacije na izraz (4.3) dobije se prijenosna funkcija PT1člana:
G(s) =Y (s)
U(s)=
K
Ts+ 1(4.4)
Slika 4.7: Praktični primjeri PT1 članova
1To znači da u prijelaznoj funkciji nema oscilatornog ponašanja
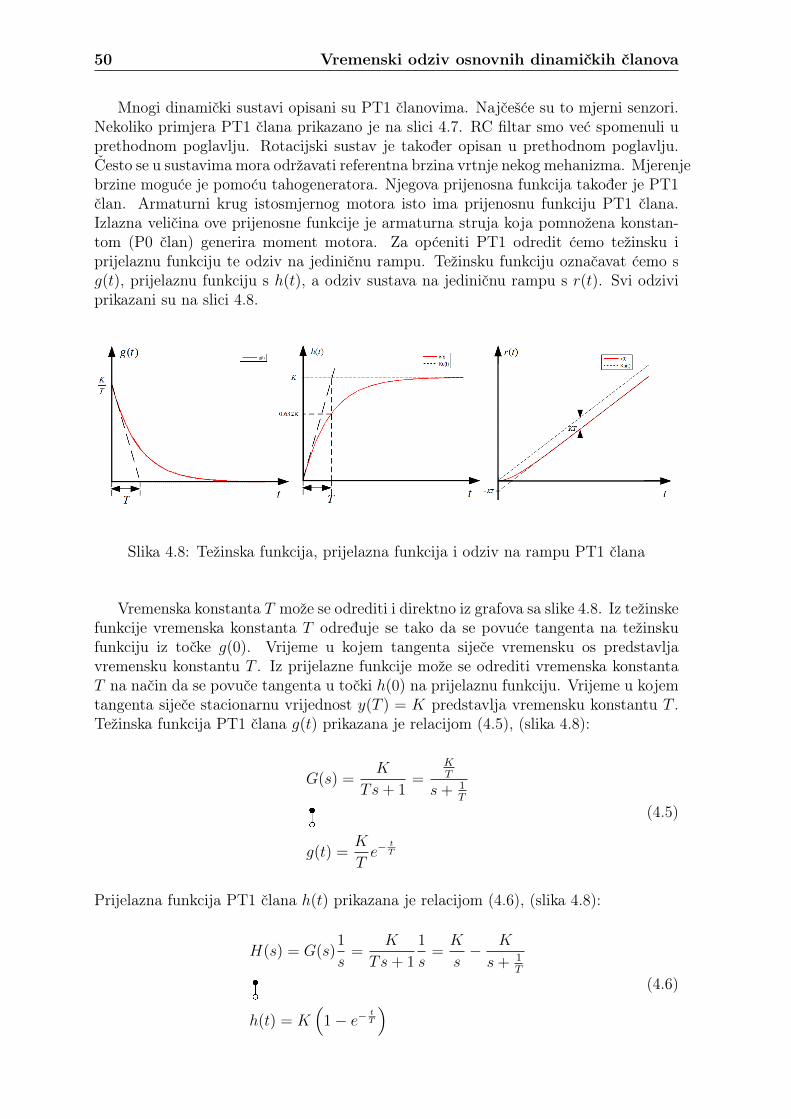
50 Vremenski odziv osnovnih dinamičkih članova
Mnogi dinamički sustavi opisani su PT1 članovima. Najčešće su to mjerni senzori.Nekoliko primjera PT1 člana prikazano je na slici 4.7. RC filtar smo već spomenuli uprethodnom poglavlju. Rotacijski sustav je također opisan u prethodnom poglavlju.Često se u sustavima mora održavati referentna brzina vrtnje nekog mehanizma. Mjerenjebrzine moguće je pomoću tahogeneratora. Njegova prijenosna funkcija također je PT1član. Armaturni krug istosmjernog motora isto ima prijenosnu funkciju PT1 člana.Izlazna veličina ove prijenosne funkcije je armaturna struja koja pomnožena konstan-tom (P0 član) generira moment motora. Za općeniti PT1 odredit ćemo težinsku iprijelaznu funkciju te odziv na jediničnu rampu. Težinsku funkciju označavat ćemo sg(t), prijelaznu funkciju s h(t), a odziv sustava na jediničnu rampu s r(t). Svi odziviprikazani su na slici 4.8.
Slika 4.8: Težinska funkcija, prijelazna funkcija i odziv na rampu PT1 člana
Vremenska konstanta T može se odrediti i direktno iz grafova sa slike 4.8. Iz težinskefunkcije vremenska konstanta T određuje se tako da se povuće tangenta na težinskufunkciju iz točke g(0). Vrijeme u kojem tangenta siječe vremensku os predstavljavremensku konstantu T . Iz prijelazne funkcije može se odrediti vremenska konstantaT na način da se povuče tangenta u točki h(0) na prijelaznu funkciju. Vrijeme u kojemtangenta siječe stacionarnu vrijednost y(T ) = K predstavlja vremensku konstantu T .Težinska funkcija PT1 člana g(t) prikazana je relacijom (4.5), (slika 4.8):
G(s) =K
Ts+ 1=
KT
s+ 1T
g(t) =K
Te−
tT
(4.5)
Prijelazna funkcija PT1 člana h(t) prikazana je relacijom (4.6), (slika 4.8):
H(s) = G(s)1
s=
K
Ts+ 1
1
s=K
s− K
s+ 1T
h(t) = K(
1− e−tT
) (4.6)

4.4 Proporcionalni član drugog reda (PT2 član) 51
Odziv na jediničnu rampu PT1 člana r(t) prikazan je relacijom (4.7), (slika 4.8):
R(s) = G(s)1
s2=
K
Ts+ 1
1
s2=K
s2−KT
(1
s− 1
s+ 1T
)
r(t) = Kt−KT(
1− e−tT
) (4.7)
Za provjeru ispravnosti prethodnih izraza moguće je napraviti provjeru. Naime,težinska funkcija PT1 člana derivacija je prijelazne funkcije PT1 člana, a prijelaznafunkcija PT1 člana derivacija je odziva PT1 člana na jediničnu rampu, odnosno:
G(s) =K
Ts+ 1, H(s) = G(s)
1
s⇒ G(s) = sH(s) t d g(t) = h′(t) (4.8)
Relacija (4.8) dobivena je prema pravilu o derivaciji originala koje odgovara množenjemslike sa s. Ovo pravilo može se primjeniti na bilo koji sustav. Pokušajte sami pokazatda je prijelazna funkcija sustava derivacija je odziva sustava na jediničnu rampu.
4.4 Proporcionalni član drugog reda (PT2 član)
Proporcionalni član drugog reda (u daljnjem tekstu samo PT2 član) ima vremenskousporenje drugog reda što znači da posjeduje dvije vremenske konstante T1 i T2. Koefi-cijent pojačanja sustava je K. PT2 član je aperiodski član2. Diferencijalna jednadžbaPT2 člana je:
T1T2y′′(t) + (T1 + T2)y
′(t) + y(t) = Ku(t) (4.9)
Primjenom Laplaceove transformacije na izraz (4.9) dobije se prijenosna funkcija PT2člana:
G(s) =Y (s)
U(s)=
K
T1T2s2 + (T1 + T2)s+ 1=
K
(T1s+ 1)(T2s+ 1)(4.10)
Iz izraza (4.10) vidi se da je PT2 član ništa drugo već umnožak dvaju PT1 članova.Ovom analogijom možemo zaključiti da će PTn članovi (proporcionalni članovi n-togreda) biti umnožak n PT1 članova. PTn članovi izlaze izvan opsega osnovnih di-namičkih članova pa ih ovdje nećemo opisivati. Na slici 4.9 prikazana su dva primjeraPT2 člana. Prvi primjer je kaskada dvaju RV filtra. Drugi primjer prikazuje strujnoovisan strujni izvor o struji induktiviteta i1(t) RL kruga. Drugi dio sheme predstavljastrujno djelilo. Struja induktiviteta i1(t) pojačana je β puta.
2To znači da u prijelaznoj funkciji nema oscilatornog ponašanja
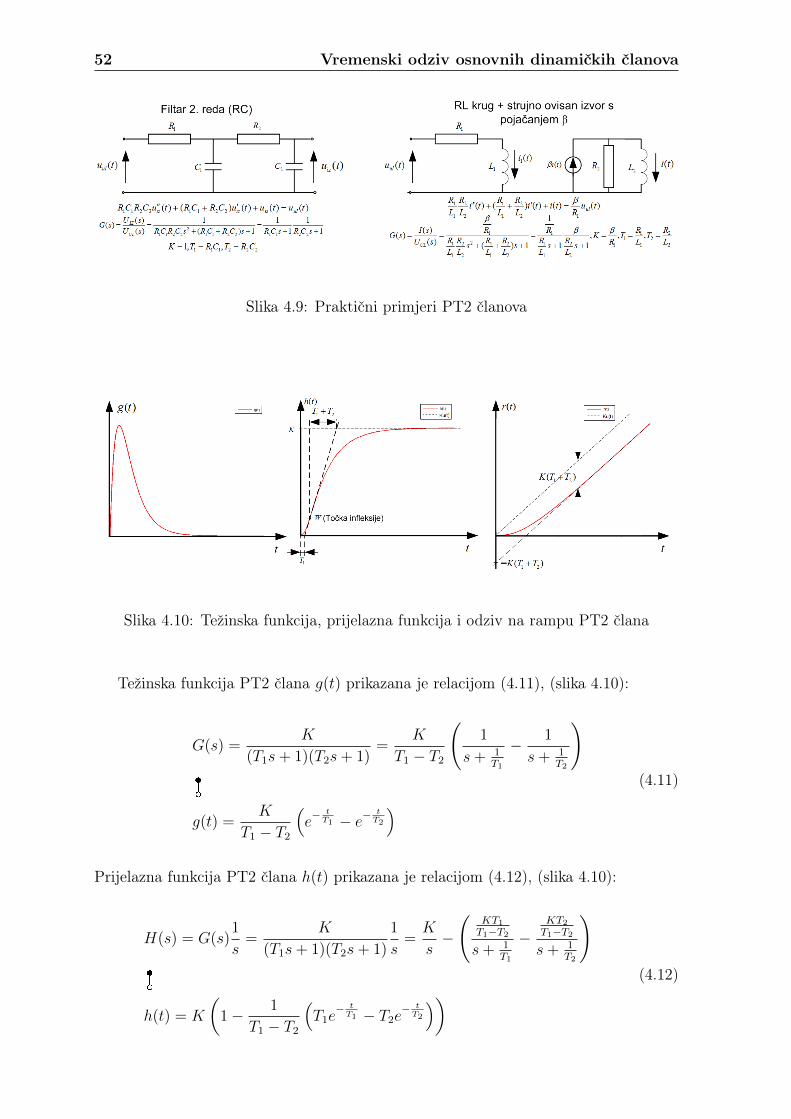
52 Vremenski odziv osnovnih dinamičkih članova
Slika 4.9: Praktični primjeri PT2 članova
Slika 4.10: Težinska funkcija, prijelazna funkcija i odziv na rampu PT2 člana
Težinska funkcija PT2 člana g(t) prikazana je relacijom (4.11), (slika 4.10):
G(s) =K
(T1s+ 1)(T2s+ 1)=
K
T1 − T2
(1
s+ 1T1
− 1
s+ 1T2
)
g(t) =K
T1 − T2
(e− tT1 − e−
tT2
) (4.11)
Prijelazna funkcija PT2 člana h(t) prikazana je relacijom (4.12), (slika 4.10):
H(s) = G(s)1
s=
K
(T1s+ 1)(T2s+ 1)
1
s=K
s−
(KT1T1−T2s+ 1
T1
−KT2T1−T2s+ 1
T2
)
h(t) = K
(1− 1
T1 − T2
(T1e
− tT1 − T2e−
tT2
)) (4.12)

4.5 Proporcionalni član drugog reda s prigušenim oscilatornim ponašanjem(PT2S član) 53
Odziv na jediničnu rampu PT2 člana r(t) prikazan je relacijom (7.23), (slika 4.10):
R(s) = G(s)1
s2=
K
(T1s+ 1)(T2s+ 1)
1
s2=K
s2− K(T1 + T2)
s+
(KT1
2
T1−T2s+ 1
T1
−KT2
2
T1−T2s+ 1
T2
)
r(t) = K
(t− (T1 + T2) +
1
T1 − T2
(T1
2e− tT1 − T22e−
tT2
))(4.13)
Ako je T1 = T2 = T težinska funkcija, prijelazna funkcija i odziv sustava na jediničnurampu bitno se mijenja. Težinska funkcija PT2 člana g(t) uz T1 = T2 = T prikazanaje relacijom (4.14):
G(s) =K
(Ts+ 1)2=
K
T(s+ 1
T 2
)2
g(t) =K
T 2te−
tT
(4.14)
Prijelazna funkcija PT2 člana g(t) uz T1 = T2 = T prikazana je relacijom (4.15):
H(s) = G(s)1
s=
K
(Ts+ 1)21
s=K
s− K
T(s+ 1
T
)2 − K
s+ 1T
h(t) = K
(1− 1
Tte−
tT − e−
tT
) (4.15)
Odziv na jediničnu rampu PT2 člana r(t) uz T1 = T2 = T prikazan je relacijom (4.16):
R(s) = G(s)1
s2=
K
(Ts+ 1)21
s2=K
s2− 2KT
s− K(
s+ 1T
)2 +2KT
s+ 1T
r(t) = K(t− 2T + te−
tT + 2Te−
tT
) (4.16)
4.5 Proporcionalni član drugog reda s prigušenim os-cilatornim ponašanjem (PT2S član)
Proporcionalni član drugog reda s prigušenim oscilatornim ponašanjem (u daljenjemtekstu PT2S član) nema aperiodski odziv, već odziv s prigušenim oscilatornim pon-ašanjem. To znači da oscilaciju traju jedno određeno vrijeme, a zatim se ugase. Difer-encijalna jednadžba PT2S člana je:
y′′(t) + 2ζωny′(t) + ωn
2y(t) = Kωn2u(t) (4.17)
gdje je:
• ζ – faktor prigušenja;

54 Vremenski odziv osnovnih dinamičkih članova
• ωn – prirodna frekvencija sustava3, [rad/s];
• K – koeficijent pojačanja sustava.
Primjenom Laplaceove transformacije na izraz (4.17) dobije se prijenosna funkcijaPT2S člana:
G(s) =Y (s)
U(s)=
Kωn2
s2 + 2ζωns+ ωn2(4.18)
Polovi sustava su nultočke nazivnika. Položaj polova u s-ravnini definira odziv sustava.Pokušajmo sada na temelju nazivnika prijenosne funkcije (4.18) izračunat polove PT2Sčlana:
s2 + 2ζωns+ ωn2 = 0⇒ s1,2 =
−2ζωn ±√
4ζ2ωn2 − 4ωn2
2
s1,2 = −ζωn ± jωn√
1− ζ2 = −ζωn ± jωd(4.19)
gdje je ωd frekvencija prigušenih oscilacija. Iz relacije (4.19) može se vidjeti da će sustavimati prigušene ocilacije za 0 < ζ < 1. Za ζ = 0 sustav ima neprigušene oscilacije.Ako je ζ > 1 prijenosna funkcija (4.18) PT2S člana prelazi u PT2 član s vremenskimkonstantama:
G(s) =Y (s)
U(s)=
Kωn2
s2 + 2ζωns+ ωn2=
K
(T1s+ 1)(T2s+ 1)
s2 + 2ζωns+ ωn2 = 0⇒ s1,2 = −ζωn ± ωn
√ζ2 − 1
(T1s+ 1)(T2s+ 1) = 0⇒ T1 = − 1
s1, T2 = − 1
s2
T1 =1
ωn
(ζ +
√ζ2 − 1
) , T2 =1
ωn
(ζ −
√ζ2 − 1
)(4.20)
Slika 4.11: Praktični primjeri PT2S članova
3U nekim literaturama pojam poznat kao frekvencija neprigušenih oscilacija
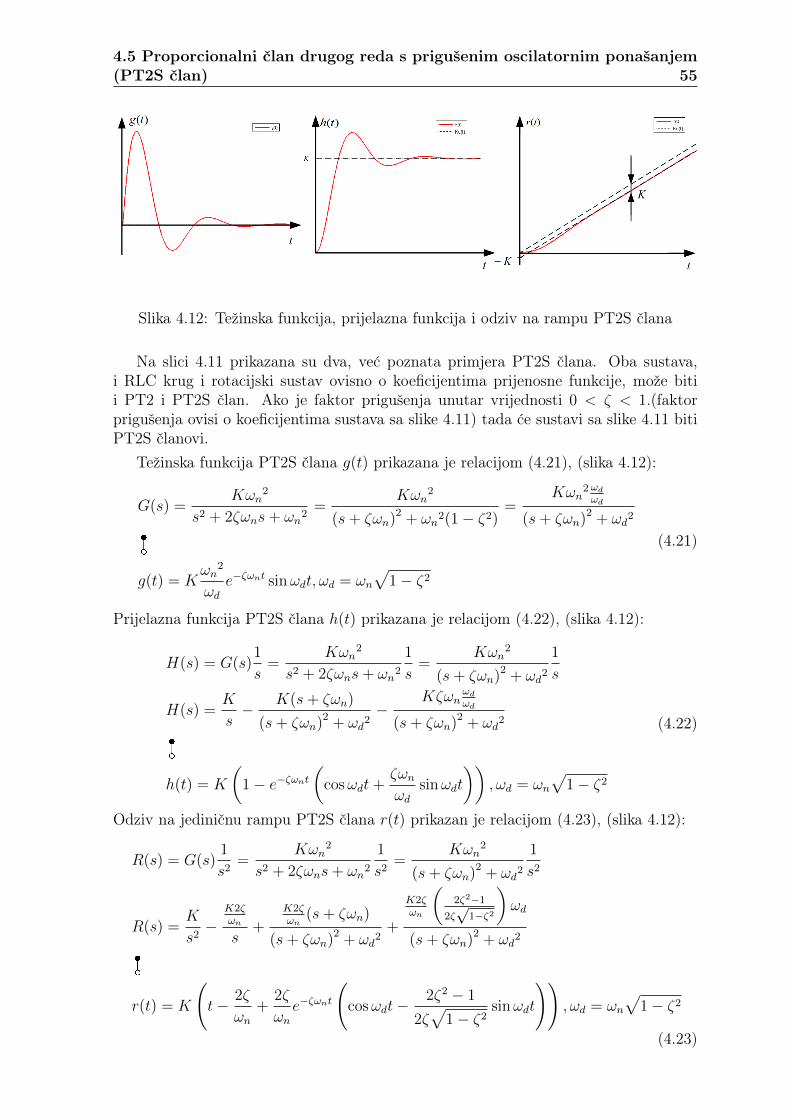
4.5 Proporcionalni član drugog reda s prigušenim oscilatornim ponašanjem(PT2S član) 55
Slika 4.12: Težinska funkcija, prijelazna funkcija i odziv na rampu PT2S člana
Na slici 4.11 prikazana su dva, već poznata primjera PT2S člana. Oba sustava,i RLC krug i rotacijski sustav ovisno o koeficijentima prijenosne funkcije, može bitii PT2 i PT2S član. Ako je faktor prigušenja unutar vrijednosti 0 < ζ < 1.(faktorprigušenja ovisi o koeficijentima sustava sa slike 4.11) tada će sustavi sa slike 4.11 bitiPT2S članovi.
Težinska funkcija PT2S člana g(t) prikazana je relacijom (4.21), (slika 4.12):
G(s) =Kωn
2
s2 + 2ζωns+ ωn2=
Kωn2
(s+ ζωn)2 + ωn2(1− ζ2)=
Kωn2 ωdωd
(s+ ζωn)2 + ωd2
g(t) = Kωn
2
ωde−ζωnt sinωdt, ωd = ωn
√1− ζ2
(4.21)
Prijelazna funkcija PT2S člana h(t) prikazana je relacijom (4.22), (slika 4.12):
H(s) = G(s)1
s=
Kωn2
s2 + 2ζωns+ ωn21
s=
Kωn2
(s+ ζωn)2 + ωd21
s
H(s) =K
s− K(s+ ζωn)
(s+ ζωn)2 + ωd2−
Kζωnωdωd
(s+ ζωn)2 + ωd2
h(t) = K
(1− e−ζωnt
(cosωdt+
ζωnωd
sinωdt
)), ωd = ωn
√1− ζ2
(4.22)
Odziv na jediničnu rampu PT2S člana r(t) prikazan je relacijom (4.23), (slika 4.12):
R(s) = G(s)1
s2=
Kωn2
s2 + 2ζωns+ ωn21
s2=
Kωn2
(s+ ζωn)2 + ωd21
s2
R(s) =K
s2−
K2ζωn
s+
K2ζωn
(s+ ζωn)
(s+ ζωn)2 + ωd2+
K2ζωn
(2ζ2−1
2ζ√
1−ζ2
)ωd
(s+ ζωn)2 + ωd2
r(t) = K
(t− 2ζ
ωn+
2ζ
ωne−ζωnt
(cosωdt−
2ζ2 − 1
2ζ√
1− ζ2sinωdt
)), ωd = ωn
√1− ζ2
(4.23)
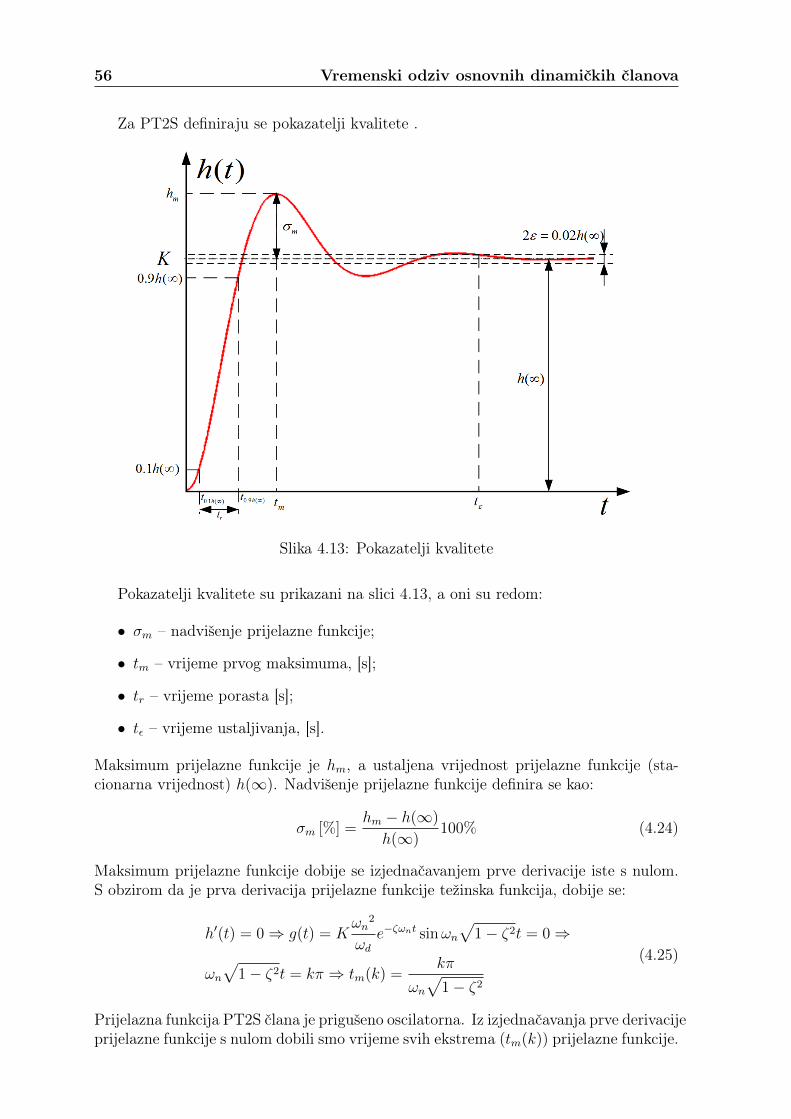
56 Vremenski odziv osnovnih dinamičkih članova
Za PT2S definiraju se pokazatelji kvalitete .
Slika 4.13: Pokazatelji kvalitete
Pokazatelji kvalitete su prikazani na slici 4.13, a oni su redom:
• σm – nadvišenje prijelazne funkcije;
• tm – vrijeme prvog maksimuma, [s];
• tr – vrijeme porasta [s];
• tε – vrijeme ustaljivanja, [s].
Maksimum prijelazne funkcije je hm, a ustaljena vrijednost prijelazne funkcije (sta-cionarna vrijednost) h(∞). Nadvišenje prijelazne funkcije definira se kao:
σm [%] =hm − h(∞)
h(∞)100% (4.24)
Maksimum prijelazne funkcije dobije se izjednačavanjem prve derivacije iste s nulom.S obzirom da je prva derivacija prijelazne funkcije težinska funkcija, dobije se:
h′(t) = 0⇒ g(t) = Kωn
2
ωde−ζωnt sinωn
√1− ζ2t = 0⇒
ωn√
1− ζ2t = kπ ⇒ tm(k) =kπ
ωn√
1− ζ2
(4.25)
Prijelazna funkcija PT2S člana je prigušeno oscilatorna. Iz izjednačavanja prve derivacijeprijelazne funkcije s nulom dobili smo vrijeme svih ekstrema (tm(k)) prijelazne funkcije.
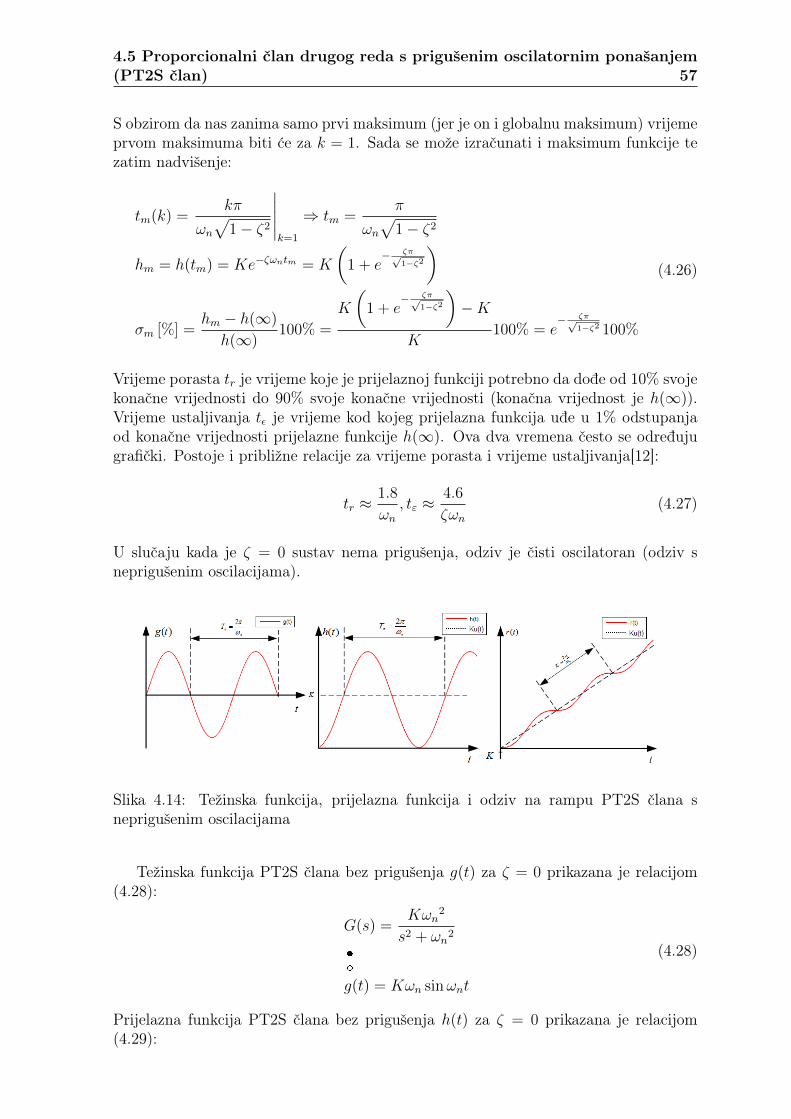
4.5 Proporcionalni član drugog reda s prigušenim oscilatornim ponašanjem(PT2S član) 57
S obzirom da nas zanima samo prvi maksimum (jer je on i globalnu maksimum) vrijemeprvom maksimuma biti će za k = 1. Sada se može izračunati i maksimum funkcije tezatim nadvišenje:
tm(k) =kπ
ωn√
1− ζ2
∣∣∣∣∣k=1
⇒ tm =π
ωn√
1− ζ2
hm = h(tm) = Ke−ζωntm = K
(1 + e
− ζπ√1−ζ2
)
σm [%] =hm − h(∞)
h(∞)100% =
K
(1 + e
− ζπ√1−ζ2
)−K
K100% = e
− ζπ√1−ζ2 100%
(4.26)
Vrijeme porasta tr je vrijeme koje je prijelaznoj funkciji potrebno da dođe od 10% svojekonačne vrijednosti do 90% svoje konačne vrijednosti (konačna vrijednost je h(∞)).Vrijeme ustaljivanja tε je vrijeme kod kojeg prijelazna funkcija uđe u 1% odstupanjaod konačne vrijednosti prijelazne funkcije h(∞). Ova dva vremena često se određujugrafički. Postoje i približne relacije za vrijeme porasta i vrijeme ustaljivanja[12]:
tr ≈1.8
ωn, tε ≈
4.6
ζωn(4.27)
U slučaju kada je ζ = 0 sustav nema prigušenja, odziv je čisti oscilatoran (odziv sneprigušenim oscilacijama).
Slika 4.14: Težinska funkcija, prijelazna funkcija i odziv na rampu PT2S člana sneprigušenim oscilacijama
Težinska funkcija PT2S člana bez prigušenja g(t) za ζ = 0 prikazana je relacijom(4.28):
G(s) =Kωn
2
s2 + ωn2
g(t) = Kωn sinωnt
(4.28)
Prijelazna funkcija PT2S člana bez prigušenja h(t) za ζ = 0 prikazana je relacijom(4.29):

58 Vremenski odziv osnovnih dinamičkih članova
H(s) = G(s)1
s=
Kωn2
s2 + ωn21
s=K
s− Ks
s2 + ωn2
h(t) = K(1− cosωnt)
(4.29)
Odziv na jediničnu rampu PT2S člana bez prigušenja r(t) za ζ = 0 prikazan je relacijom(4.30):
R(s) = G(s)1
s2=
Kωn2
s2 + ωn21
s2=K
s2−
Kωnωn
s2 + ωn2
r(t) = K(t− 1
ωnsinωnt)
(4.30)
Na slici 4.14 prikazan je period neprigušenih oscilacija Tn.
4.6 Derivacijski član (D član)
Članovi kod kojih je izlazna veličina proporcionalna ulaznoj veličini nazivamo derivaci-jskim članovima (u daljnjem tekstu D članovi). Diferencijalna jednadžba D člana je:
y(t) = Kddu(t)
dt= Kdu
′(t) (4.31)
Primjenom Laplaceove transformacije na izraz (4.31) dobije se prijenosna funkcija Dčlana:
G(s) =Y (s)
U(s)= Kds (4.32)
Slika 4.15: Praktični primjeri D članova
Na slici 4.15 prikazani su poznati primjeri D članova. Poznato je da je strujakroz kondenzator proporcionalna derivaciji napona na kondenzatoru te da je naponna zavojnici proporcionalan derivaciji struje kroz zavojnicu. U mehanici, brzina jederivacija puta, odnosno u slučaju rotacijskog sustava, kutna brzina je derivacija kutnogpomaka.
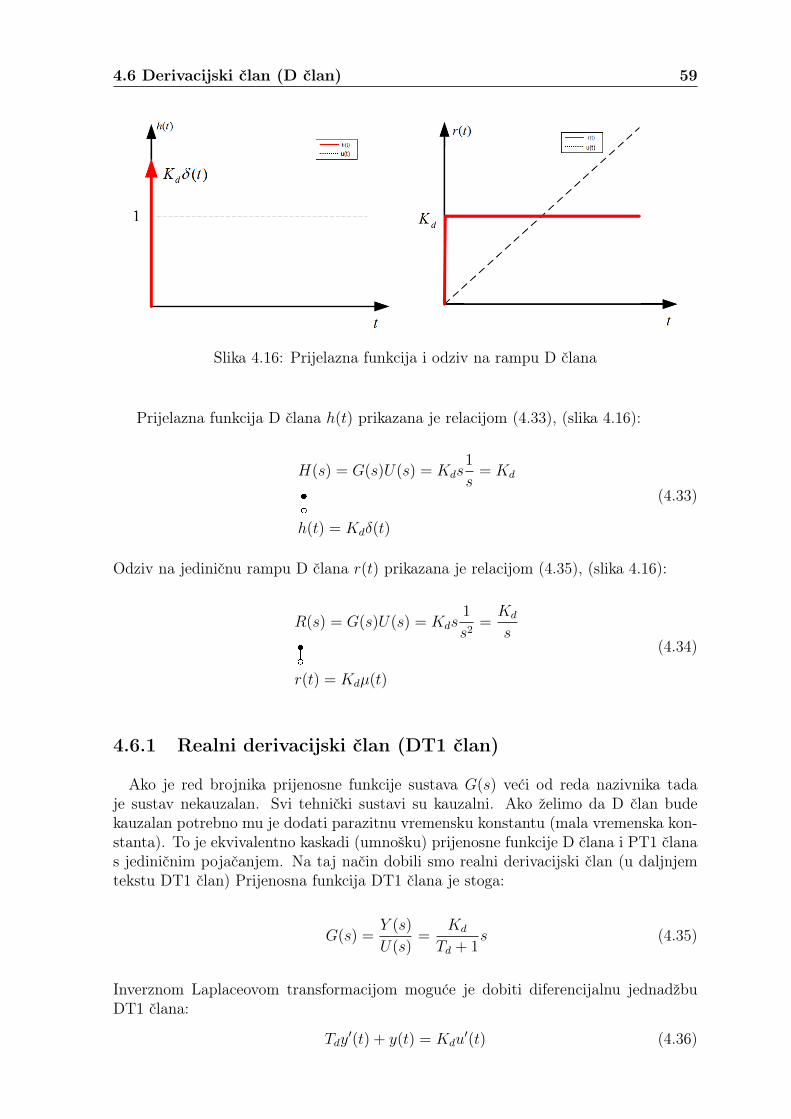
4.6 Derivacijski član (D član) 59
Slika 4.16: Prijelazna funkcija i odziv na rampu D člana
Prijelazna funkcija D člana h(t) prikazana je relacijom (4.33), (slika 4.16):
H(s) = G(s)U(s) = Kds1
s= Kd
h(t) = Kdδ(t)
(4.33)
Odziv na jediničnu rampu D člana r(t) prikazana je relacijom (4.35), (slika 4.16):
R(s) = G(s)U(s) = Kds1
s2=Kd
s
r(t) = Kdµ(t)
(4.34)
4.6.1 Realni derivacijski član (DT1 član)
Ako je red brojnika prijenosne funkcije sustava G(s) veći od reda nazivnika tadaje sustav nekauzalan. Svi tehnički sustavi su kauzalni. Ako želimo da D član budekauzalan potrebno mu je dodati parazitnu vremensku konstantu (mala vremenska kon-stanta). To je ekvivalentno kaskadi (umnošku) prijenosne funkcije D člana i PT1 članas jediničnim pojačanjem. Na taj način dobili smo realni derivacijski član (u daljnjemtekstu DT1 član) Prijenosna funkcija DT1 člana je stoga:
G(s) =Y (s)
U(s)=
Kd
Td + 1s (4.35)
Inverznom Laplaceovom transformacijom moguće je dobiti diferencijalnu jednadžbuDT1 člana:
Tdy′(t) + y(t) = Kdu
′(t) (4.36)
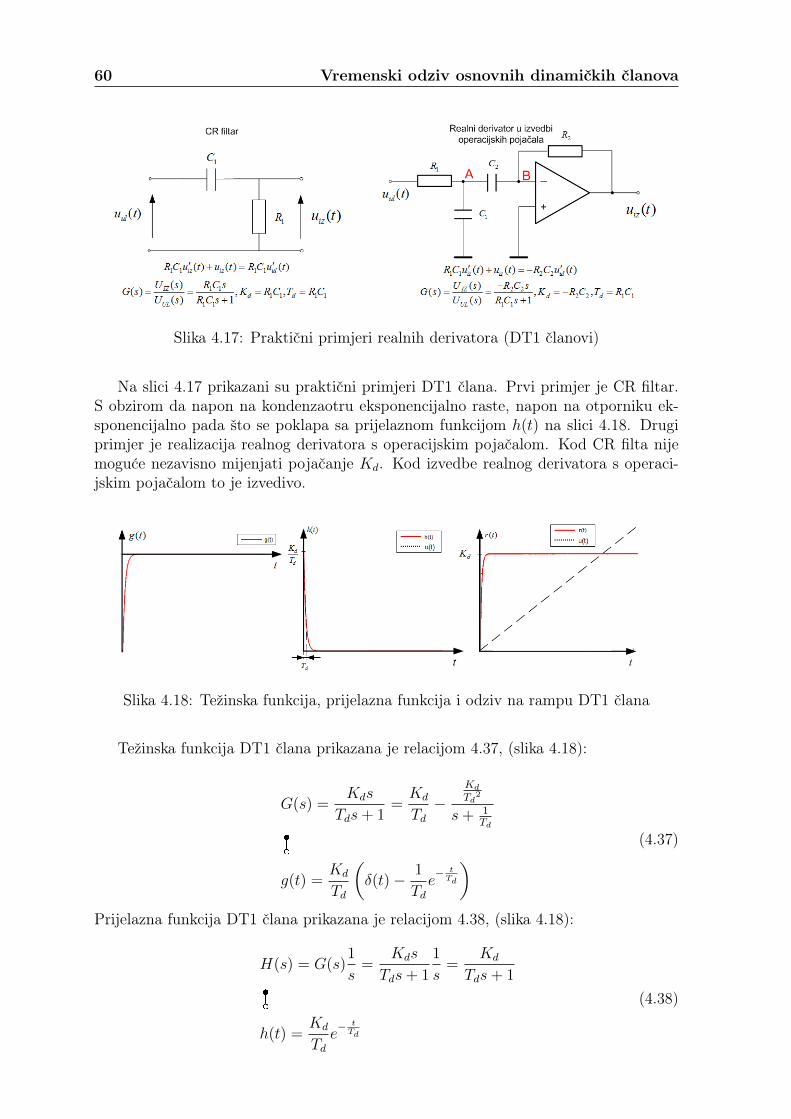
60 Vremenski odziv osnovnih dinamičkih članova
Slika 4.17: Praktični primjeri realnih derivatora (DT1 članovi)
Na slici 4.17 prikazani su praktični primjeri DT1 člana. Prvi primjer je CR filtar.S obzirom da napon na kondenzaotru eksponencijalno raste, napon na otporniku ek-sponencijalno pada što se poklapa sa prijelaznom funkcijom h(t) na slici 4.18. Drugiprimjer je realizacija realnog derivatora s operacijskim pojačalom. Kod CR filta nijemoguće nezavisno mijenjati pojačanje Kd. Kod izvedbe realnog derivatora s operaci-jskim pojačalom to je izvedivo.
Slika 4.18: Težinska funkcija, prijelazna funkcija i odziv na rampu DT1 člana
Težinska funkcija DT1 člana prikazana je relacijom 4.37, (slika 4.18):
G(s) =Kds
Tds+ 1=Kd
Td−
KdTd
2
s+ 1Td
g(t) =Kd
Td
(δ(t)− 1
Tde− tTd
) (4.37)
Prijelazna funkcija DT1 člana prikazana je relacijom 4.38, (slika 4.18):
H(s) = G(s)1
s=
Kds
Tds+ 1
1
s=
Kd
Tds+ 1
h(t) =Kd
Tde− tTd
(4.38)
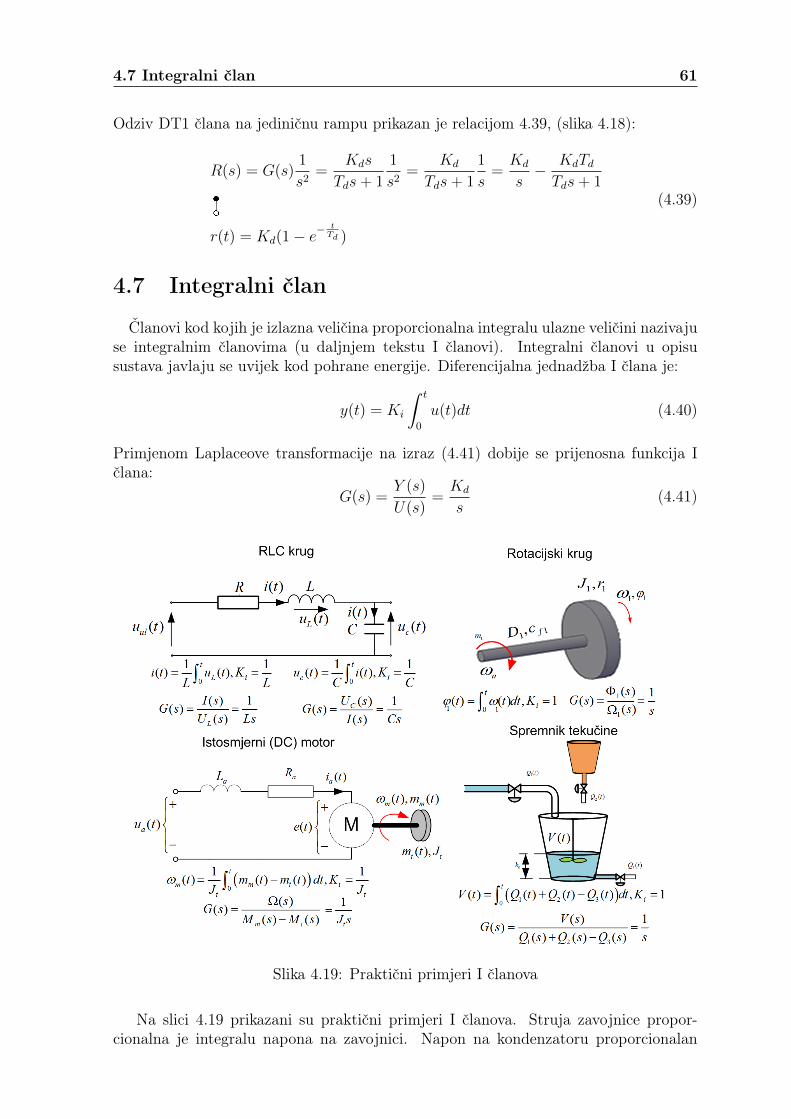
4.7 Integralni član 61
Odziv DT1 člana na jediničnu rampu prikazan je relacijom 4.39, (slika 4.18):
R(s) = G(s)1
s2=
Kds
Tds+ 1
1
s2=
Kd
Tds+ 1
1
s=Kd
s− KdTdTds+ 1
r(t) = Kd(1− e− tTd )
(4.39)
4.7 Integralni član
Članovi kod kojih je izlazna veličina proporcionalna integralu ulazne veličini nazivajuse integralnim članovima (u daljnjem tekstu I članovi). Integralni članovi u opisusustava javlaju se uvijek kod pohrane energije. Diferencijalna jednadžba I člana je:
y(t) = Ki
∫ t
0
u(t)dt (4.40)
Primjenom Laplaceove transformacije na izraz (4.41) dobije se prijenosna funkcija Ičlana:
G(s) =Y (s)
U(s)=Kd
s(4.41)
Slika 4.19: Praktični primjeri I članova
Na slici 4.19 prikazani su praktični primjeri I članova. Struja zavojnice propor-cionalna je integralu napona na zavojnici. Napon na kondenzatoru proporcionalan

62 Vremenski odziv osnovnih dinamičkih članova
je integralu struje kroz kondenzator. U mehanici, put je integral brzine, a u slučajurotacijskog sustava, kutni pomak integral je brzine vrtnje. Kod istosmjernog motoraprzina vrtnje proporcionalna je integralu dinamičkog momenta4. Volumen tekučineu nekom spremniku integral je razlike svih ulaznih volumnih protoka i svih izlaznihvolumnih protoka.
Slika 4.20: Težinska funkcija, prijelazna funkcija i odziv na rampu I člana
Težinska funkcija I člana prikazana je relacijom 4.42, (slika 4.20):
G(s) =Ki
s
g(t) = Kiµ(t)
(4.42)
Prijelazna funkcija I člana prikazana je relacijom 4.43, (slika 4.20):
H(s) = G(s)1
s=Ki
s
1
s=Ki
s2
h(t) = Kit
(4.43)
Odziv I člana na jediničnu rampu prikazan je relacijom 4.44, (slika 4.20):
R(s) = G(s)1
s2=Ki
s
1
s2=Ki
s3
r(t) = Kit
2
(4.44)
4.8 Član s transportnim kašnjenjem
Do sada su svi dinamički članovi bili opisivi diferencijalnim jednadžbama. Često seu industrijskim postrojenjima pojavljuje tzv. članovi s transportnim kašnjenjem5 kojise ne može opisati diferencijalnom jednadžbom. Ovaj član naziva se član s mrtvim
4Dinamički moment razlika je momenta motora mm(t) i momenta tereta mt(t)5U nekim literaturama se naziva član s mrtvim vremenom
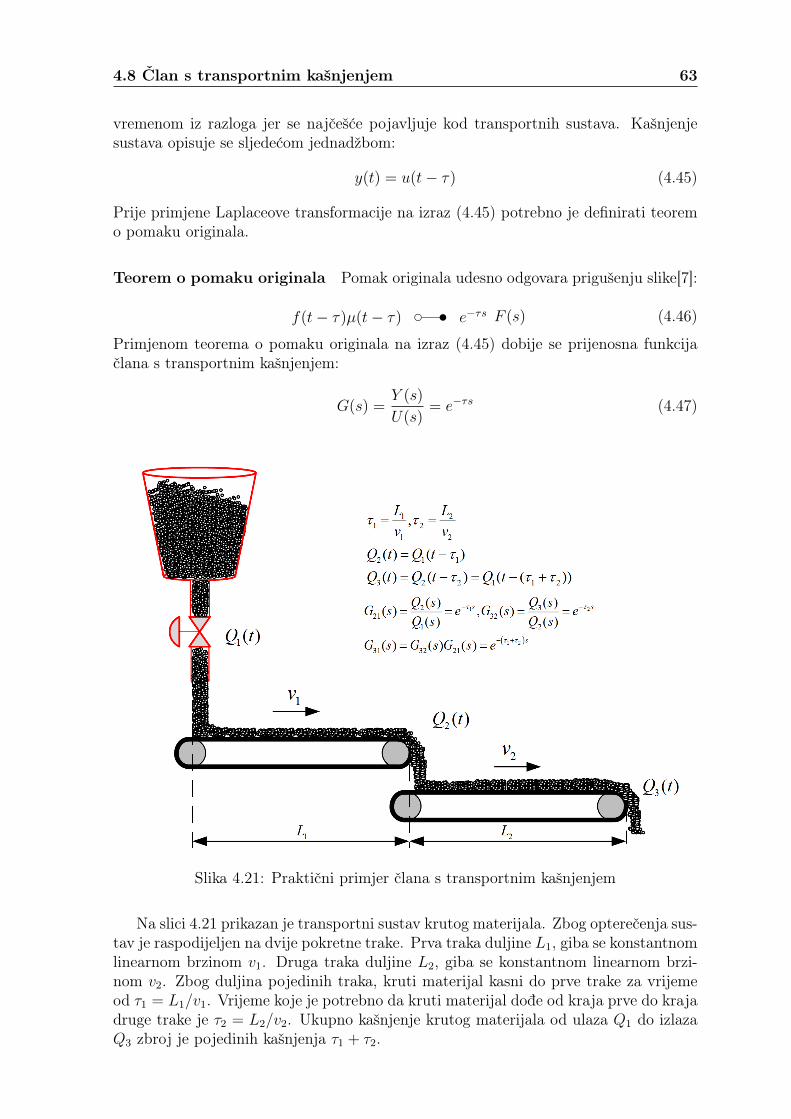
4.8 Član s transportnim kašnjenjem 63
vremenom iz razloga jer se najčešće pojavljuje kod transportnih sustava. Kašnjenjesustava opisuje se sljedećom jednadžbom:
y(t) = u(t− τ) (4.45)
Prije primjene Laplaceove transformacije na izraz (4.45) potrebno je definirati teoremo pomaku originala.
Teorem o pomaku originala Pomak originala udesno odgovara prigušenju slike[7]:
f(t− τ)µ(t− τ) d t e−τs F (s) (4.46)
Primjenom teorema o pomaku originala na izraz (4.45) dobije se prijenosna funkcijačlana s transportnim kašnjenjem:
G(s) =Y (s)
U(s)= e−τs (4.47)
Slika 4.21: Praktični primjer člana s transportnim kašnjenjem
Na slici 4.21 prikazan je transportni sustav krutog materijala. Zbog opterečenja sus-tav je raspodijeljen na dvije pokretne trake. Prva traka duljine L1, giba se konstantnomlinearnom brzinom v1. Druga traka duljine L2, giba se konstantnom linearnom brzi-nom v2. Zbog duljina pojedinih traka, kruti materijal kasni do prve trake za vrijemeod τ1 = L1/v1. Vrijeme koje je potrebno da kruti materijal dođe od kraja prve do krajadruge trake je τ2 = L2/v2. Ukupno kašnjenje krutog materijala od ulaza Q1 do izlazaQ3 zbroj je pojedinih kašnjenja τ1 + τ2.
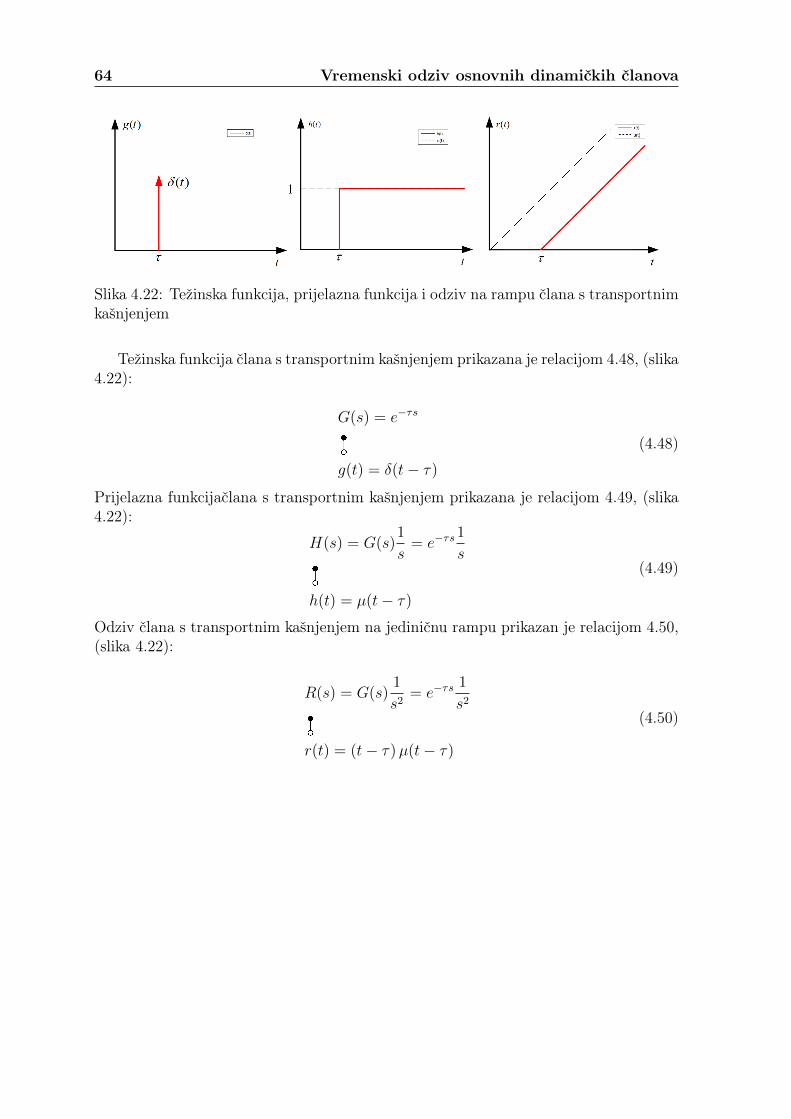
64 Vremenski odziv osnovnih dinamičkih članova
Slika 4.22: Težinska funkcija, prijelazna funkcija i odziv na rampu člana s transportnimkašnjenjem
Težinska funkcija člana s transportnim kašnjenjem prikazana je relacijom 4.48, (slika4.22):
G(s) = e−τs
g(t) = δ(t− τ)
(4.48)
Prijelazna funkcijačlana s transportnim kašnjenjem prikazana je relacijom 4.49, (slika4.22):
H(s) = G(s)1
s= e−τs
1
s
h(t) = µ(t− τ)
(4.49)
Odziv člana s transportnim kašnjenjem na jediničnu rampu prikazan je relacijom 4.50,(slika 4.22):
R(s) = G(s)1
s2= e−τs
1
s2
r(t) = (t− τ)µ(t− τ)
(4.50)
Poglavlje 5
Frekvencijski odziv osnovnihdinamičkih članova
Ako na ulaz linearnih vremenski nepromjenjivih sustava dovedemo neprigušenu os-cilatornu komponentu1 tada će nakon prijelaznih pojava sustav poprimiti isto neprigušenooscilatorno ponašanje s frekvencijom ulaznog signala, ali s pomakom u fazi. Na ulazsustava dovedimo pobudu oblika:
u(t) = A sinωt (5.1)
Primjenom Laplaceove transformacije na pobudu (5.1) dobijemo:
U(s) =Aω
s2 + ω2(5.2)
Neka je linearni sustav opisan prijenosnom funkcijom G(s) i neka za sve polove vrijediRe pi < 02[1]. Odziv sustava može se dobiti kao:
Y (s) = G(s)U(s) = G(s)Aω
s2 + ω2(5.3)
Ako želimo napraviti inverznu Laplaceovu transformaciju izraza (5.3) potrebno je naY (s) primjeniti Heavisideov razvoj3 :
Y (s) =K1
s− p1+
K2
s− p2+ ...+
Kn
s− pn+
Ks1
s− jω+
Ks2
s+ jω(5.4)
Pokušajmo sada nači koeficijente Ks1 i Ks2 koristeći formulu :
Ks1 = lims→jω
(s− jω)Y (s) = lims→jω
(s− jω)G(s)Aω
(s− jω) (s+ jω)
Ks2 = lims→−jω
(s+ jω)Y (s) = lims→jω
(s+ jω)G(s)Aω
(s− jω) (s+ jω)
(5.5)
1Sinusna ili kosinusna pobuda s frekvencijom ω2Ako su relani djelovi svih polova manji od nule tada sustav neće imati raspirujuć odziv, odnosno
vremenski odziv eksponencijalnih članova iščezava3Pogledati potpoglavlje Matematički modeli kontinuiranih sustava - Opis sustava prijenosnom
funkcijom u Laplaceovoj domeni
66 Frekvencijski odziv osnovnih dinamičkih članova
Sređivanjem izraza (5.5) dobije se:
Ks1 =G(jω)Aω
(jω + jω)=G(jω)A
2j
Ks2 =G(−jω)Aω
(−jω − jω)=G(−jω)A
−2j
(5.6)
S obzirom da se svaki kompleksni proj može zapisati kao umnožak njegovog modula iargumenta4 slijedi:
Ks1 =|G(jω)| ej arg(G(jω))A
2j
Ks2 =|G(−jω)| ej arg(G(−jω))A
−2j
(5.7)
Brojevi G(jω) i G(−jω) su konjugirano kompleksni brojevi za koje vrijedi da je|G(−jω)| = |G(jω)| i arg(G(−jω)) = − arg(G(jω))[13] Sada se izraz (5.7) moženapisati na sljedeći način:
Ks1 =|G(jω)| ej arg(G(jω))A
2j
Ks2 =|G(jω)| e−j arg(G(jω))A
−2j
(5.8)
Primjenom inverzne Laplaceove transformacije na izraz (5.3) dobije se:
y(t) = K1e−p1t +K1e
−p2t + ...+Kne−pnt︸ ︷︷ ︸
homogeno rješenje
+Ks1ejωt +Ks2e
−jωt︸ ︷︷ ︸partikularno rješenje
(5.9)
Ako za polove vrijedi da je Re pi < 0 tada homogeni dio rješenja iščezava s vremenom,a ostaje samo partikularno rješenje5 od y(t). Nakon što homogeno rješenje iščezneostaje samo partiularno rješenje:
y(t) = Ks1ejωt +Ks2e
−jωt︸ ︷︷ ︸partikularno rješenje
(5.10)
Uvrstimo sada izračunate konstante Ks1 i Ks2 u izraz (5.10):
y(t) = Ks1ejωt +Ks2e
−jωt =|G(jω)| ej arg(G(jω))A
2jejωt +
|G(jω)| e−j arg(G(jω))A
−2je−jωt
y(t) = |G(jω)|Aej arg(G(jω))ejωt − e−j arg(G(jω))e−jωt
2j
y(t) = |G(jω)|Aej(ωt+arg(G(jω))) − e−j(ωt+arg(G(jω)))
2j(5.11)
Primjenom Eulerove formule6 za sinus funkciju:
sinϕ =ejϕ − e−jϕ
2j(5.12)
4a+ jb = |a+ jb| ej arg(a+jb) =√a2 + b2ej arctan(
ba )
5rješenje uzrokovano neprigušenom oscilatornom pobudom6ejϕ = cosϕ+ j sinϕ
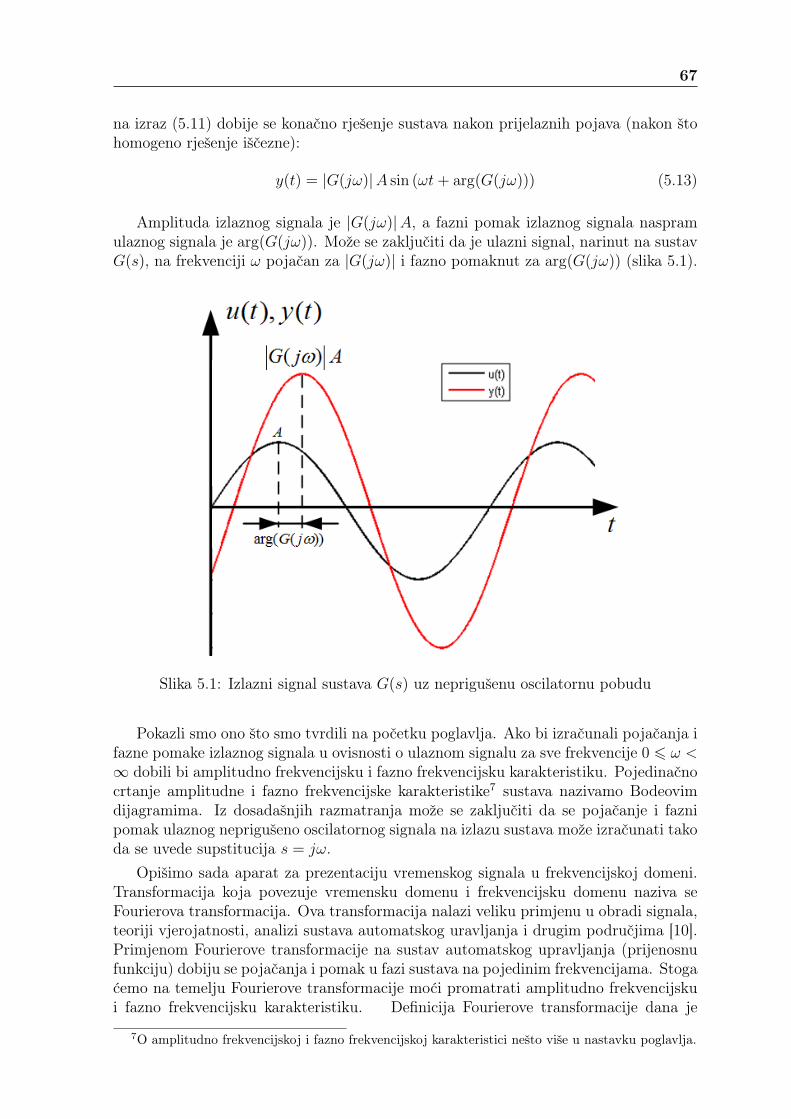
67
na izraz (5.11) dobije se konačno rješenje sustava nakon prijelaznih pojava (nakon štohomogeno rješenje iščezne):
y(t) = |G(jω)|A sin (ωt+ arg(G(jω))) (5.13)
Amplituda izlaznog signala je |G(jω)|A, a fazni pomak izlaznog signala naspramulaznog signala je arg(G(jω)). Može se zaključiti da je ulazni signal, narinut na sustavG(s), na frekvenciji ω pojačan za |G(jω)| i fazno pomaknut za arg(G(jω)) (slika 5.1).
Slika 5.1: Izlazni signal sustava G(s) uz neprigušenu oscilatornu pobudu
Pokazli smo ono što smo tvrdili na početku poglavlja. Ako bi izračunali pojačanja ifazne pomake izlaznog signala u ovisnosti o ulaznom signalu za sve frekvencije 0 6 ω <∞ dobili bi amplitudno frekvencijsku i fazno frekvencijsku karakteristiku. Pojedinačnocrtanje amplitudne i fazno frekvencijske karakteristike7 sustava nazivamo Bodeovimdijagramima. Iz dosadašnjih razmatranja može se zaključiti da se pojačanje i faznipomak ulaznog neprigušeno oscilatornog signala na izlazu sustava može izračunati takoda se uvede supstitucija s = jω.
Opišimo sada aparat za prezentaciju vremenskog signala u frekvencijskoj domeni.Transformacija koja povezuje vremensku domenu i frekvencijsku domenu naziva seFourierova transformacija. Ova transformacija nalazi veliku primjenu u obradi signala,teoriji vjerojatnosti, analizi sustava automatskog uravljanja i drugim područjima [10].Primjenom Fourierove transformacije na sustav automatskog upravljanja (prijenosnufunkciju) dobiju se pojačanja i pomak u fazi sustava na pojedinim frekvencijama. Stogaćemo na temelju Fourierove transformacije moći promatrati amplitudno frekvencijskui fazno frekvencijsku karakteristiku. Definicija Fourierove transformacije dana je
7O amplitudno frekvencijskoj i fazno frekvencijskoj karakteristici nešto više u nastavku poglavlja.

68 Frekvencijski odziv osnovnih dinamičkih članova
sljedećim izrazom [14]:
Y (ω) =
∫ ∞−∞
y(t)e−jωtdt (5.14)
Za pobudne signale u(t) koji se koriste u automatskom upravljanju vrijedi da je u(t) = 0za t < 0. Uz pretpostavku da su početna stanja sustava jednaka nuli8, za odziv sustavay(t) također vrijedi da je y(t) = 0 za t < 0. Primjenom ovog zaključka na izraz (5.14)možemo pisati:
Y (ω) =
∫ 0
−∞y(t)e−jωtdt+
∫ ∞0
y(t)e−jωtdt
Y (ω) =
∫ 0
−∞0 · e−jωtdt+
∫ ∞0
y(t)e−jωtdt
Y (ω) =
∫ ∞0
y(t)e−jωtdt
(5.15)
U izrazu (5.15) inegral za negativna vremena jednak je nuli. Ako u izrazu (5.15)napravimo supstituciju s = jω dolazimo do definicije Laplaceove transformacije signalay(t).
Y (s) =
∫ ∞0
y(t)e−stdt
∣∣∣∣s=jω
⇒ Y (ω) =
∫ ∞0
y(t)e−jωtdt (5.16)
Ako sada izraz (5.3) želimo promatrati u frekvencijskoj domeni, potrebno je samonapraviti supstituciju s = jω9.
Pokušajmo sada na temelju dosadašnjih saznanja izračunati izlaz y(t) sustava G(s)nakon prijelaznih pojava. Zadan je ulazni signal u(t) i prijenosna funkcija sustava G(s):
u(t) = 5 sin 3t
G(s) =1
(s+ 1)(s+ 2)=
1
s2 + 3s+ 2
(5.17)
Uvođenjem supstitucije s = jω u prijenosnu funkciju G(s) dobije se:
G(s) =1
s2 + 3s+ 2
∣∣∣∣s=jω
⇒ G(jω) =P (jω)
Q(jω)=
1
−ω2 + 3jω + 2
G(jω) = |G(jω)| ej arg(G(jω)) =|P (jω)| ej arg(P (jω))
|Q(jω)| ej arg(Q(jω))=
1√(2− ω2)2 + 9ω2e
j arctan( 3ω2−ω2
)
G(jω) =1√130
e−j arctan(9−7
) =
√130
130e−j2.2318, |G(jω)| =
√130
130, arg(G(jω)) = −2.2318
(5.18)Kod računanja arctan funkcije vrlo je bitno u kojem se kvadrantu nalazi točka za kojuračunamo arcus tanges. Brojnik arctan funkcije predstavlja imaginarnu komponentutočke u kompleksnoj ravnini, a nazivnik predstavlja realnu komponentu točke u kom-pleksnoj ravnini. S obzirom da kalkulatori vraćaju vrijednosti arctan funkcije samo zakuteve iz I. i IV. kvadranta potrebno je za točke iz II. i III. kvadranta dodati još π na
8Ovo vrijedi za prijenosnu funkciju koja se računa za početna stanja jednaka nuli9Pokazali smo da vrijedi veza između Laplaceove i Fourierove transformacije, s = jω
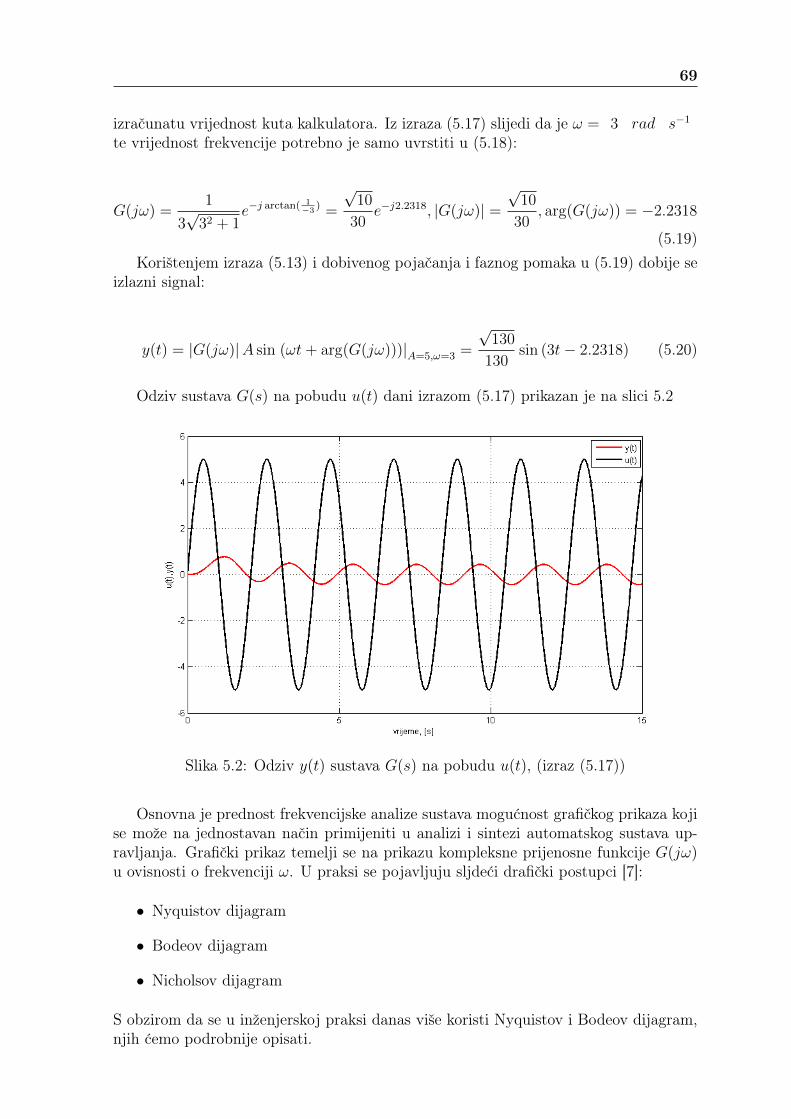
69
izračunatu vrijednost kuta kalkulatora. Iz izraza (5.17) slijedi da je ω = 3 rad s−1
te vrijednost frekvencije potrebno je samo uvrstiti u (5.18):
G(jω) =1
3√
32 + 1e−j arctan(
1−3
) =
√10
30e−j2.2318, |G(jω)| =
√10
30, arg(G(jω)) = −2.2318
(5.19)Korištenjem izraza (5.13) i dobivenog pojačanja i faznog pomaka u (5.19) dobije se
izlazni signal:
y(t) = |G(jω)|A sin (ωt+ arg(G(jω)))|A=5,ω=3 =
√130
130sin (3t− 2.2318) (5.20)
Odziv sustava G(s) na pobudu u(t) dani izrazom (5.17) prikazan je na slici 5.2
Slika 5.2: Odziv y(t) sustava G(s) na pobudu u(t), (izraz (5.17))
Osnovna je prednost frekvencijske analize sustava mogućnost grafičkog prikaza kojise može na jednostavan način primijeniti u analizi i sintezi automatskog sustava up-ravljanja. Grafički prikaz temelji se na prikazu kompleksne prijenosne funkcije G(jω)u ovisnosti o frekvenciji ω. U praksi se pojavljuju sljdeći drafički postupci [7]:
• Nyquistov dijagram
• Bodeov dijagram
• Nicholsov dijagram
S obzirom da se u inženjerskoj praksi danas više koristi Nyquistov i Bodeov dijagram,njih ćemo podrobnije opisati.
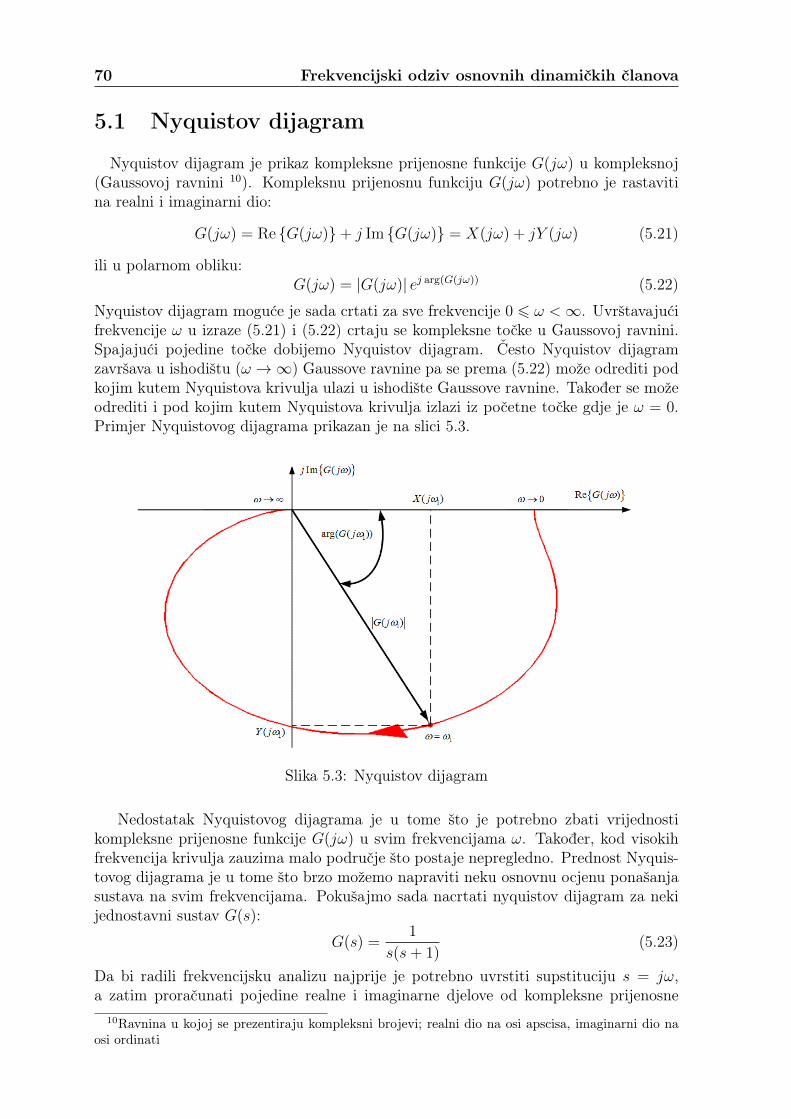
70 Frekvencijski odziv osnovnih dinamičkih članova
5.1 Nyquistov dijagram
Nyquistov dijagram je prikaz kompleksne prijenosne funkcije G(jω) u kompleksnoj(Gaussovoj ravnini 10). Kompleksnu prijenosnu funkciju G(jω) potrebno je rastavitina realni i imaginarni dio:
G(jω) = Re G(jω)+ j Im G(jω) = X(jω) + jY (jω) (5.21)
ili u polarnom obliku:G(jω) = |G(jω)| ej arg(G(jω)) (5.22)
Nyquistov dijagram moguće je sada crtati za sve frekvencije 0 6 ω <∞. Uvrštavajućifrekvencije ω u izraze (5.21) i (5.22) crtaju se kompleksne točke u Gaussovoj ravnini.Spajajući pojedine točke dobijemo Nyquistov dijagram. Često Nyquistov dijagramzavršava u ishodištu (ω →∞) Gaussove ravnine pa se prema (5.22) može odrediti podkojim kutem Nyquistova krivulja ulazi u ishodište Gaussove ravnine. Također se možeodrediti i pod kojim kutem Nyquistova krivulja izlazi iz početne točke gdje je ω = 0.Primjer Nyquistovog dijagrama prikazan je na slici 5.3.
Slika 5.3: Nyquistov dijagram
Nedostatak Nyquistovog dijagrama je u tome što je potrebno zbati vrijednostikompleksne prijenosne funkcije G(jω) u svim frekvencijama ω. Također, kod visokihfrekvencija krivulja zauzima malo područje što postaje nepregledno. Prednost Nyquis-tovog dijagrama je u tome što brzo možemo napraviti neku osnovnu ocjenu ponašanjasustava na svim frekvencijama. Pokušajmo sada nacrtati nyquistov dijagram za nekijednostavni sustav G(s):
G(s) =1
s(s+ 1)(5.23)
Da bi radili frekvencijsku analizu najprije je potrebno uvrstiti supstituciju s = jω,a zatim proračunati pojedine realne i imaginarne djelove od kompleksne prijenosne
10Ravnina u kojoj se prezentiraju kompleksni brojevi; realni dio na osi apscisa, imaginarni dio naosi ordinati

5.1 Nyquistov dijagram 71
funkcije G(jω):
G(s) =1
s(s+ 1)
∣∣∣∣jω
⇒ G(jω) =1
jω(jω + 1)=
1
−ω2 + jω
G(jω) =1
ω√ω2 + 1ej arctan(
1−ω )
=1
ω√ω2 + 1
e−j arctan(1−ω )
(5.24)
Racionalizacijom kompleksne prijenosne funkcije G(jω) dobije se:
G(jω) = Re G(jω)+ j Im G(jω) = X(jω) + jY (jω)
G(jω) =1
−ω2 + jω
−ω2 − jω−ω2 − jω
=−ω2 − jωω4 + ω2
=−1
ω2 + 1+ j
−1
ω3 + ω
X(jω) =−1
ω2 + 1
Y (jω) =−1
ω3 + ω
(5.25)
Realni dio X(jω) kompleksne prijenosne funkcije G(jω) uvijek je negativan bez obzirana predznak frekvencije ω, dok je imaginarni dio Y (jω) kompleksne prijenosne funkcijeG(jω) pozitivan za negativne frekvencije ω, a negativan za pozitivne frekvencije ω. Sobzirom da u tehničkim sustavima ne poznajemo negativnu frekvenciju, crtanje Nyquis-tovog dijagrama bit će samo za pozitivne frekvencije 0 6 ω <∞ što smo već i naveli.Ako je tako, tada će i imaginarni dio Y (jω) kompleksne prijenosne funkcije G(jω)biti uvijek negativan. Za sada smo zaključili da će Nyquistov dijagram sustava (5.23)egzistirati u III kvadrantu kompleksne ravnine. Pogledajmo što se događa u točkamakad ω → 0 i kad ω →∞.
limω→0
X(jω) =−1
ω2 + 1= −1, lim
ω→0Y (jω) =
−1
ω3 + ω= −∞
limω→∞
X(jω) =−1
ω2 + 1= 0, lim
ω→∞Y (jω) =
−1
ω3 + ω= 0
(5.26)
Uzmimo još jednu frekvenciju za koju ćemo odrediti točku u kompleksnoj ravnini (npr.ω = 1):
X(j1) =−1
12 + 1
∣∣∣∣ = −1
2, Y (j1) =
−1
13 + 1= −1
2(5.27)
Prije crtanja Nyquistovog dijagrama poželjno je da se izračuna vrijednost kuta podkojim se izlazi iz početne točke (ω → 0) i kuta pod kojim se ulazi u krajnju točku (ω →∞). U slučaju sustava definiranog izrazom (5.23) to je lako odrediti i bez matematičkogaparata, ali postoje sustavi kod kojih je Nyquistova krivulja vrlo specifična. Potrebnoje odrediti arg(G(jω)) za navedene dvije frekvencije:
limω→0
arg(G(jω)) = limω→0
(− arctan
(1
−ω
))= −
(π2
)= −π
2
limω→∞
arg(G(jω)) = limω→∞
(− arctan
(1
−ω
))= − (π) = −π
(5.28)
Nakon svih izračuna moguće je nacrtati Nyquistov dijagram sustava (5.24), (slika 5.4).

72 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.4: Nyquistov dijagram sustava (5.24)
5.2 Bodeov dijagram
Bodeovi dijagrami su dijagrami koji prikazuju posebno ovisnost amplitude o frekven-ciji, a posebno ovisnost faze o frekvenciji nekog sustava. Pojedine dijagrame ćemo zvatiamplitudno frekvencijska karakteristika i fazno frekvencijska karakteristika. Ove karak-teristike crtaju se u lin - log11 skali. S obzirom da ćemo amplitudu crtati u decibelima,a modul12 kompleksne prijenosne funkcije |G(jω)| predstavlja pojačanje sustava, ko-ristit ćemo poznati izraz iz elektronike za omjer izlazne i ulazne snage signale, odnosnoomjer izlaznog i ulaznog napona:
A [dB] = 10 logPiPu
= 10 logUi
2
Uu2 = 20 log
UiUu
(5.29)
odnosno primjenjujući to na modul kompleksne prijenosne funkcije |G(jω)|:
|G(jω)| [dB] = 20 log |G(jω)| (5.30)
Prijenosna funkcija sustava općenito se može napisati kao umnožak pojačanja sustavaK, nula u brojniku i polova u nazivniku:
G(s) = K(s− n1)(s− n2) · · · (s− nm)
(s− p1)(s− p2) · · · (s− pn)(5.31)
Supstitucijom s = jω u izrazu (5.31) dobije se:
G(jω) = K(jω − n1)(jω − n2) · · · (jω − nm)
(jω − p1)(jω − p2) · · · (jω − pn)(5.32)
11Amplituda se crta linearno u decibelima (dB), a frekvencija logaritamski u rad/s12Apsolutna vrijednost broja

5.2 Bodeov dijagram 73
Ako je sustav kauzalan broj nula je općenito manji ili jednak broju polova (m 6 n).Neka je broj nula jednak broju polova (m = n, najopćenitiji slučaj). Sada izraz (5.32)možemo napisati na sljedeći način:
G(jω) = K(jω − n1)
(jω − p1)(jω − n2)
(jω − p2)· · · (jω − nm)
(jω − pn)(5.33)
Izraz (5.33) može se poopćiti i na slučajeve kada je broj nula manji od broja polova(m < n). Tada bi kompleksna funkcija bila:
G(jω) = K(jω − n1)
(jω − p1)(jω − n2)
(jω − p2)· · · (jω − nm)
(jω − pm)· · · 1
(jω − pn)(5.34)
Pojedine faktore možemo zapisati iz izraza (5.33) i (5.34) možemo zapisati kao zasebnekompleksne prijenosne funkcije:
G(jω) =K ·Gn1(jω) · · ·Gnm(jω)
Gp1(jω)Gp2(jω) · · ·Gpn(jω)
Gn1(jω) = (jω − n1), , , Gnm(jω) = (jω − nm)
Gp1(jω) = (jω − p1), , , Gpn(jω) = (jω − pn)
(5.35)
U izrazu (5.35) Gni(jω) su nule sustava (1 6 i 6 m), Gpj(jω) su polovi sustava(1 6 j 6 n). Ako primijenimo izraz (5.22) na izraz (5.35) dobije se:
G(jω) =|K| earg(K) |Gn1(jω)| earg(Gn1(jω)) |Gn2(jω)| earg(Gn2(jω)) · · |Gnm(jω)| earg(Gnm(jω))
|Gp1(jω)| earg(Gp1(jω)) |Gp2(jω)| earg(Gp2(jω)) · · · |Gpn(jω)| earg(Gpn(jω))(5.36)
odnosno:
|G(jω)| = |K| |Gn1(jω)| |Gn2(jω)| · · · |Gnm(jω)||Gp1(jω)| |Gp2(jω)| · · · |Gpn(jω)|
(5.37)
i:
arg(G(jω)) = arg(K) + arg(Gn1(jω)) + arg(Gn2(jω)) + ...+ arg(Gnm(jω))
− arg(Gp1(jω))− arg(Gp2(jω))− ...− arg(Gpn(jω))(5.38)
Netko bi se zapitao zašto tražimo argument konstante pojačanja K. Naime, ako sustavima negativno pojačanje tada je arg(K) = π. Na izraz (5.37) potrebno je djelovatilogaritamskom funkcijom:
20 log |G(jω)| = 20 log
(|K| |Gn1(jω)| |Gn2(jω)| · · · |Gnm(jω)||Gp1(jω)| |Gp2(jω)| · · · |Gpn(jω)|
)(5.39)
Korištenjem izraza (5.30) i pravila logaritmiranja dobije se:
|G(jω)| [dB] = 20 log |K|+ 20 log |Gn1(jω)|+ 20 log |Gn2(jω)|+ ...+ 20 log |Gnm(jω)|+−20 log |Gp1(jω)| − 20 log |Gp2(jω)| − ...− 20 log |Gpn(jω)|
(5.40)Izraz (5.40) predstavlja amplitudno frekvencijsku karakteristiku, a izraz (5.38) pred-stavlja fazno frekvencijsku karakteristiku. Ako se izrazi (5.40) i (5.38) prezentiraju na
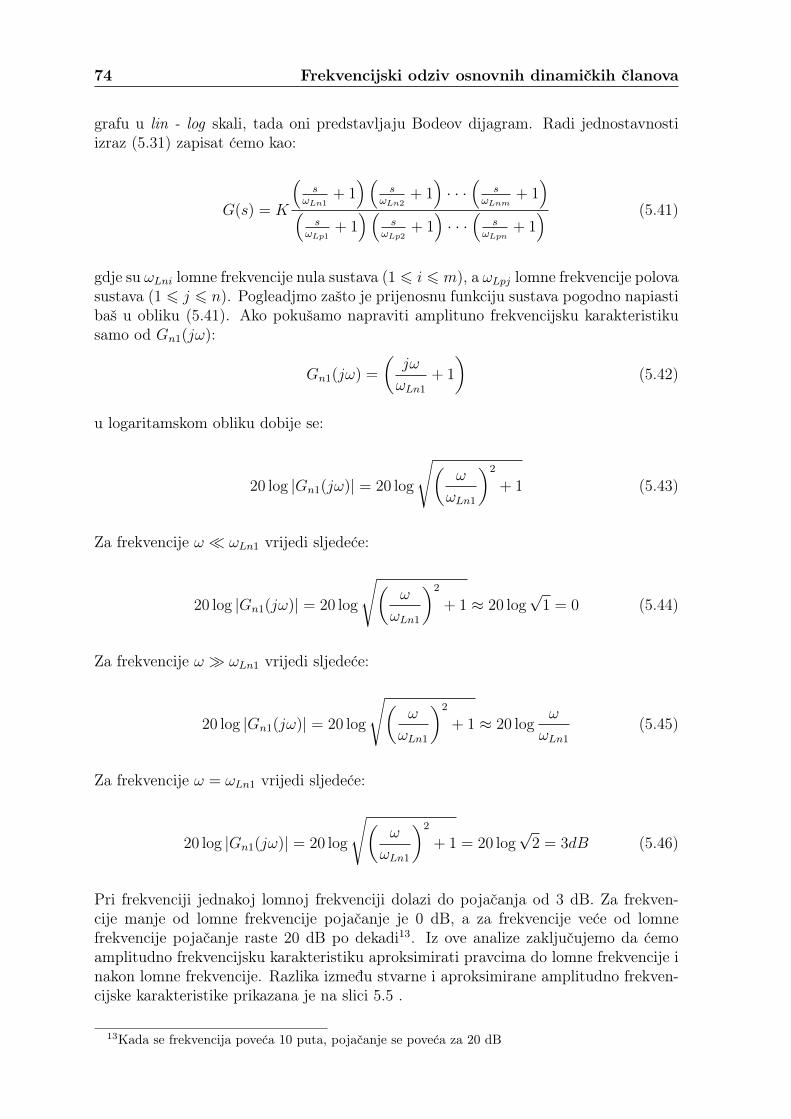
74 Frekvencijski odziv osnovnih dinamičkih članova
grafu u lin - log skali, tada oni predstavljaju Bodeov dijagram. Radi jednostavnostiizraz (5.31) zapisat ćemo kao:
G(s) = K
(s
ωLn1+ 1)(
sωLn2
+ 1)· · ·(
sωLnm
+ 1)
(s
ωLp1+ 1)(
sωLp2
+ 1)· · ·(
sωLpn
+ 1) (5.41)
gdje su ωLni lomne frekvencije nula sustava (1 6 i 6 m), a ωLpj lomne frekvencije polovasustava (1 6 j 6 n). Pogleadjmo zašto je prijenosnu funkciju sustava pogodno napiastibaš u obliku (5.41). Ako pokušamo napraviti amplituno frekvencijsku karakteristikusamo od Gn1(jω):
Gn1(jω) =
(jω
ωLn1+ 1
)(5.42)
u logaritamskom obliku dobije se:
20 log |Gn1(jω)| = 20 log
√(ω
ωLn1
)2
+ 1 (5.43)
Za frekvencije ω ωLn1 vrijedi sljedeće:
20 log |Gn1(jω)| = 20 log
√(ω
ωLn1
)2
+ 1 ≈ 20 log√
1 = 0 (5.44)
Za frekvencije ω ωLn1 vrijedi sljedeće:
20 log |Gn1(jω)| = 20 log
√(ω
ωLn1
)2
+ 1 ≈ 20 logω
ωLn1(5.45)
Za frekvencije ω = ωLn1 vrijedi sljedeće:
20 log |Gn1(jω)| = 20 log
√(ω
ωLn1
)2
+ 1 = 20 log√
2 = 3dB (5.46)
Pri frekvenciji jednakoj lomnoj frekvenciji dolazi do pojačanja od 3 dB. Za frekven-cije manje od lomne frekvencije pojačanje je 0 dB, a za frekvencije veće od lomnefrekvencije pojačanje raste 20 dB po dekadi13. Iz ove analize zaključujemo da ćemoamplitudno frekvencijsku karakteristiku aproksimirati pravcima do lomne frekvencije inakon lomne frekvencije. Razlika između stvarne i aproksimirane amplitudno frekven-cijske karakteristike prikazana je na slici 5.5 .
13Kada se frekvencija poveća 10 puta, pojačanje se poveća za 20 dB
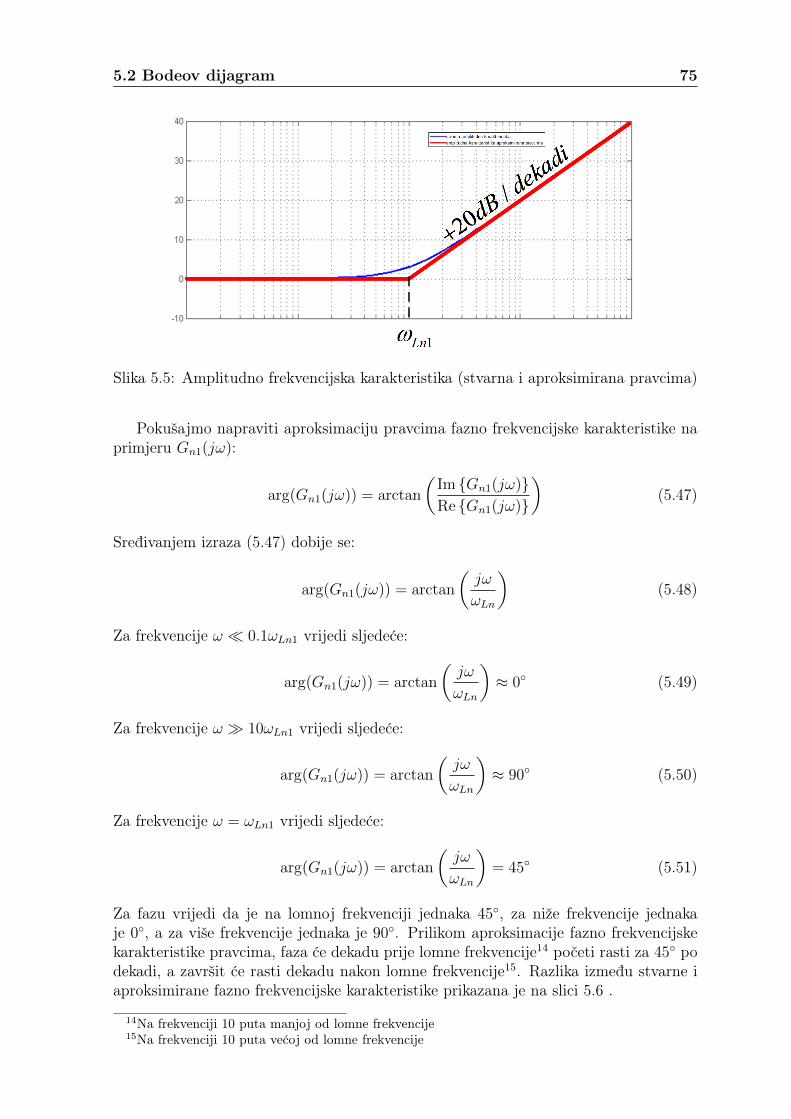
5.2 Bodeov dijagram 75
Slika 5.5: Amplitudno frekvencijska karakteristika (stvarna i aproksimirana pravcima)
Pokušajmo napraviti aproksimaciju pravcima fazno frekvencijske karakteristike naprimjeru Gn1(jω):
arg(Gn1(jω)) = arctan
(Im Gn1(jω)Re Gn1(jω)
)(5.47)
Sređivanjem izraza (5.47) dobije se:
arg(Gn1(jω)) = arctan
(jω
ωLn
)(5.48)
Za frekvencije ω 0.1ωLn1 vrijedi sljedeće:
arg(Gn1(jω)) = arctan
(jω
ωLn
)≈ 0 (5.49)
Za frekvencije ω 10ωLn1 vrijedi sljedeće:
arg(Gn1(jω)) = arctan
(jω
ωLn
)≈ 90 (5.50)
Za frekvencije ω = ωLn1 vrijedi sljedeće:
arg(Gn1(jω)) = arctan
(jω
ωLn
)= 45 (5.51)
Za fazu vrijedi da je na lomnoj frekvenciji jednaka 45, za niže frekvencije jednakaje 0, a za više frekvencije jednaka je 90. Prilikom aproksimacije fazno frekvencijskekarakteristike pravcima, faza će dekadu prije lomne frekvencije14 početi rasti za 45 podekadi, a završit će rasti dekadu nakon lomne frekvencije15. Razlika između stvarne iaproksimirane fazno frekvencijske karakteristike prikazana je na slici 5.6 .
14Na frekvenciji 10 puta manjoj od lomne frekvencije15Na frekvenciji 10 puta većoj od lomne frekvencije
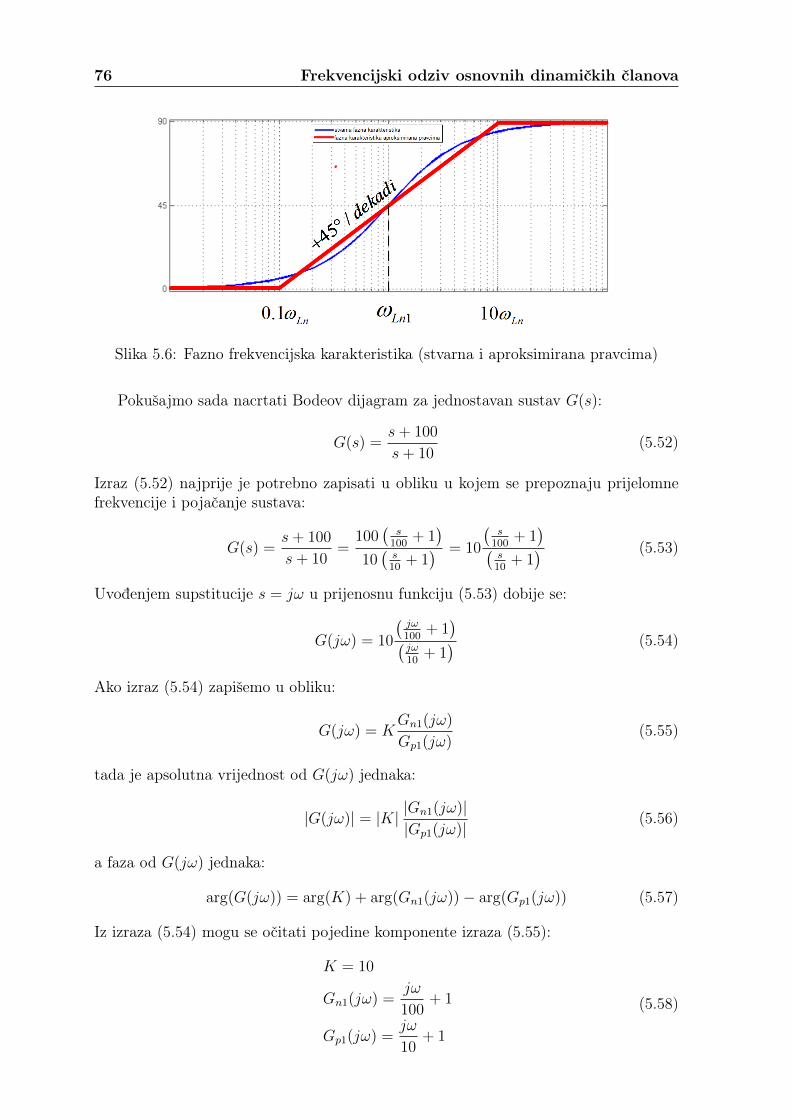
76 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.6: Fazno frekvencijska karakteristika (stvarna i aproksimirana pravcima)
Pokušajmo sada nacrtati Bodeov dijagram za jednostavan sustav G(s):
G(s) =s+ 100
s+ 10(5.52)
Izraz (5.52) najprije je potrebno zapisati u obliku u kojem se prepoznaju prijelomnefrekvencije i pojačanje sustava:
G(s) =s+ 100
s+ 10=
100(s
100+ 1)
10(s10
+ 1) = 10
(s
100+ 1)(
s10
+ 1) (5.53)
Uvođenjem supstitucije s = jω u prijenosnu funkciju (5.53) dobije se:
G(jω) = 10
(jω100
+ 1)(
jω10
+ 1) (5.54)
Ako izraz (5.54) zapišemo u obliku:
G(jω) = KGn1(jω)
Gp1(jω)(5.55)
tada je apsolutna vrijednost od G(jω) jednaka:
|G(jω)| = |K| |Gn1(jω)||Gp1(jω)|
(5.56)
a faza od G(jω) jednaka:
arg(G(jω)) = arg(K) + arg(Gn1(jω))− arg(Gp1(jω)) (5.57)
Iz izraza (5.54) mogu se očitati pojedine komponente izraza (5.55):
K = 10
Gn1(jω) =jω
100+ 1
Gp1(jω) =jω
10+ 1
(5.58)
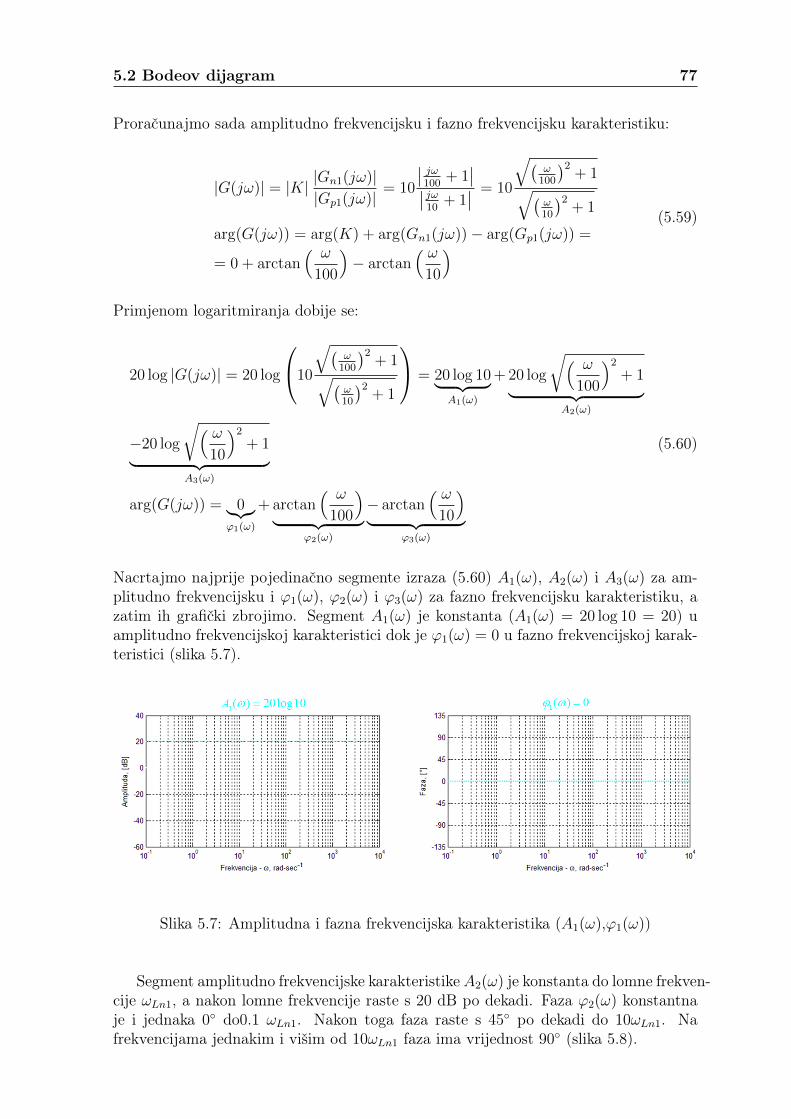
5.2 Bodeov dijagram 77
Proračunajmo sada amplitudno frekvencijsku i fazno frekvencijsku karakteristiku:
|G(jω)| = |K| |Gn1(jω)||Gp1(jω)|
= 10
∣∣ jω100
+ 1∣∣∣∣ jω
10+ 1∣∣ = 10
√(ω100
)2+ 1√(
ω10
)2+ 1
arg(G(jω)) = arg(K) + arg(Gn1(jω))− arg(Gp1(jω)) =
= 0 + arctan( ω
100
)− arctan
( ω10
) (5.59)
Primjenom logaritmiranja dobije se:
20 log |G(jω)| = 20 log
10
√(ω100
)2+ 1√(
ω10
)2+ 1
= 20 log 10︸ ︷︷ ︸A1(ω)
+ 20 log
√( ω
100
)2+ 1︸ ︷︷ ︸
A2(ω)
−20 log
√( ω10
)2+ 1︸ ︷︷ ︸
A3(ω)
arg(G(jω)) = 0︸︷︷︸ϕ1(ω)
+ arctan( ω
100
)︸ ︷︷ ︸
ϕ2(ω)
− arctan( ω
10
)︸ ︷︷ ︸
ϕ3(ω)
(5.60)
Nacrtajmo najprije pojedinačno segmente izraza (5.60) A1(ω), A2(ω) i A3(ω) za am-plitudno frekvencijsku i ϕ1(ω), ϕ2(ω) i ϕ3(ω) za fazno frekvencijsku karakteristiku, azatim ih grafički zbrojimo. Segment A1(ω) je konstanta (A1(ω) = 20 log 10 = 20) uamplitudno frekvencijskoj karakteristici dok je ϕ1(ω) = 0 u fazno frekvencijskoj karak-teristici (slika 5.7).
Slika 5.7: Amplitudna i fazna frekvencijska karakteristika (A1(ω),ϕ1(ω))
Segment amplitudno frekvencijske karakteristikeA2(ω) je konstanta do lomne frekven-cije ωLn1, a nakon lomne frekvencije raste s 20 dB po dekadi. Faza ϕ2(ω) konstantnaje i jednaka 0 do0.1 ωLn1. Nakon toga faza raste s 45 po dekadi do 10ωLn1. Nafrekvencijama jednakim i višim od 10ωLn1 faza ima vrijednost 90 (slika 5.8).
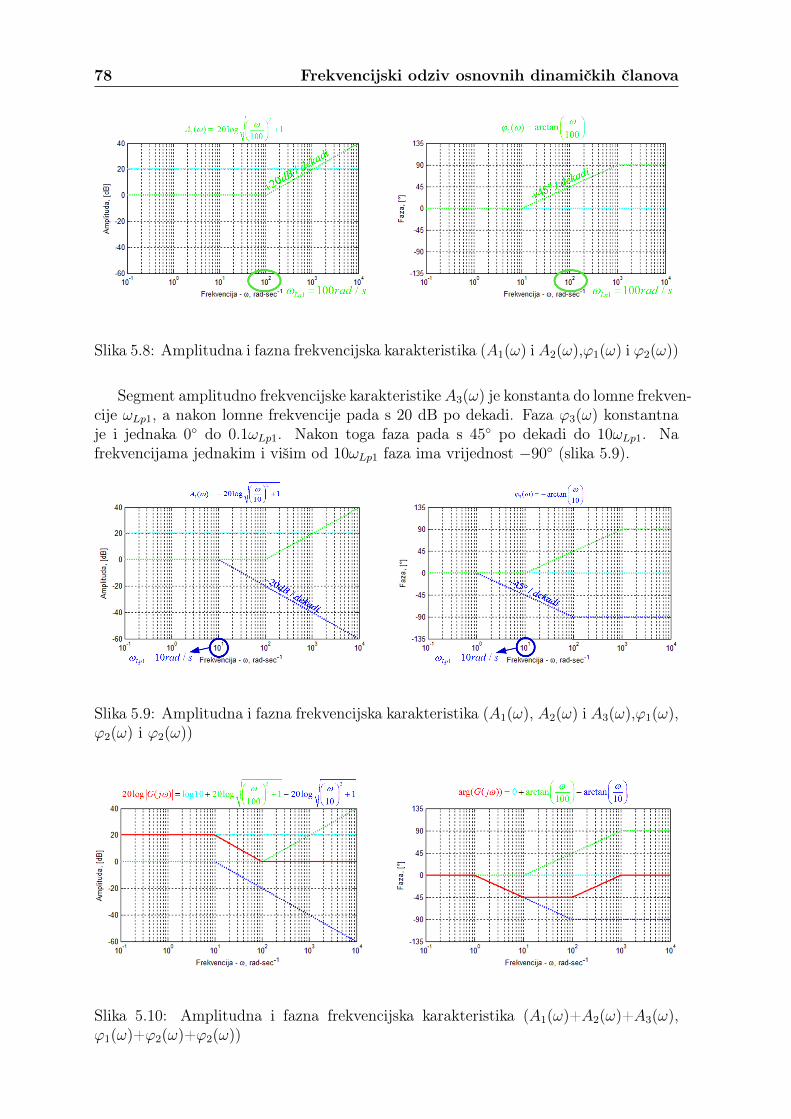
78 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.8: Amplitudna i fazna frekvencijska karakteristika (A1(ω) i A2(ω),ϕ1(ω) i ϕ2(ω))
Segment amplitudno frekvencijske karakteristikeA3(ω) je konstanta do lomne frekven-cije ωLp1, a nakon lomne frekvencije pada s 20 dB po dekadi. Faza ϕ3(ω) konstantnaje i jednaka 0 do 0.1ωLp1. Nakon toga faza pada s 45 po dekadi do 10ωLp1. Nafrekvencijama jednakim i višim od 10ωLp1 faza ima vrijednost −90 (slika 5.9).
Slika 5.9: Amplitudna i fazna frekvencijska karakteristika (A1(ω), A2(ω) i A3(ω),ϕ1(ω),ϕ2(ω) i ϕ2(ω))
Slika 5.10: Amplitudna i fazna frekvencijska karakteristika (A1(ω)+A2(ω)+A3(ω),ϕ1(ω)+ϕ2(ω)+ϕ2(ω))
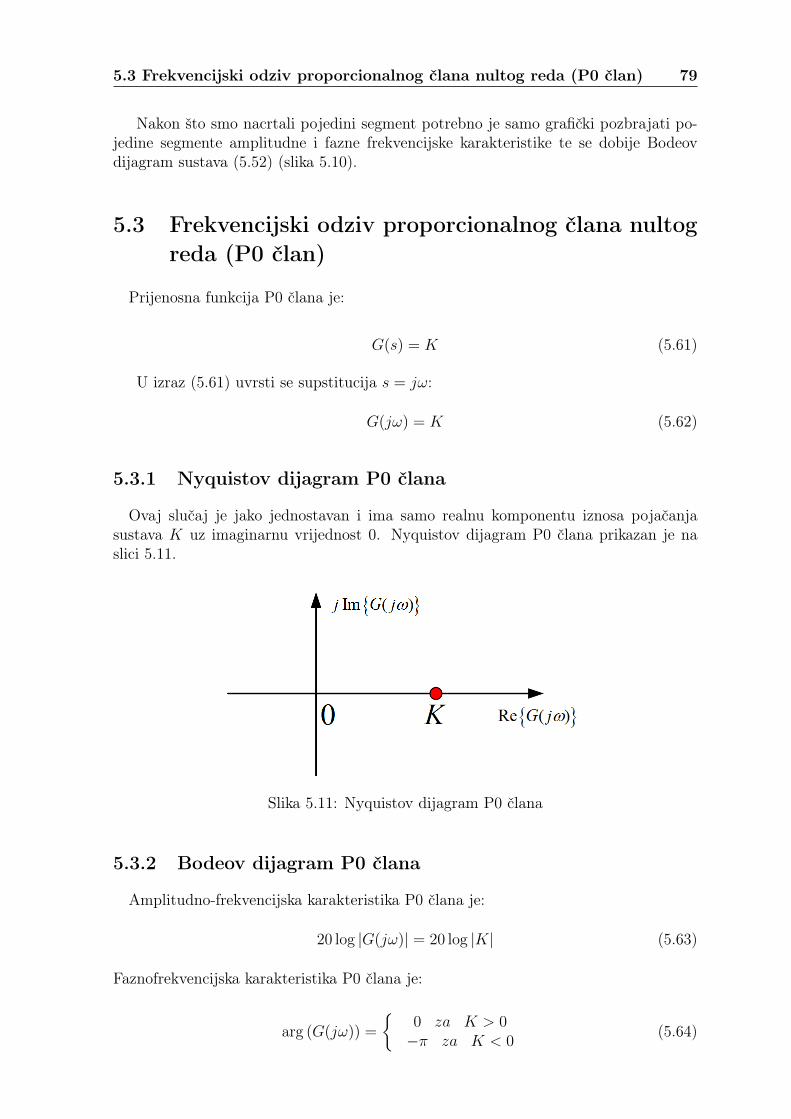
5.3 Frekvencijski odziv proporcionalnog člana nultog reda (P0 član) 79
Nakon što smo nacrtali pojedini segment potrebno je samo grafički pozbrajati po-jedine segmente amplitudne i fazne frekvencijske karakteristike te se dobije Bodeovdijagram sustava (5.52) (slika 5.10).
5.3 Frekvencijski odziv proporcionalnog člana nultogreda (P0 član)
Prijenosna funkcija P0 člana je:
G(s) = K (5.61)
U izraz (5.61) uvrsti se supstitucija s = jω:
G(jω) = K (5.62)
5.3.1 Nyquistov dijagram P0 člana
Ovaj slučaj je jako jednostavan i ima samo realnu komponentu iznosa pojačanjasustava K uz imaginarnu vrijednost 0. Nyquistov dijagram P0 člana prikazan je naslici 5.11.
Slika 5.11: Nyquistov dijagram P0 člana
5.3.2 Bodeov dijagram P0 člana
Amplitudno-frekvencijska karakteristika P0 člana je:
20 log |G(jω)| = 20 log |K| (5.63)
Faznofrekvencijska karakteristika P0 člana je:
arg (G(jω)) =
0 za K > 0−π za K < 0
(5.64)
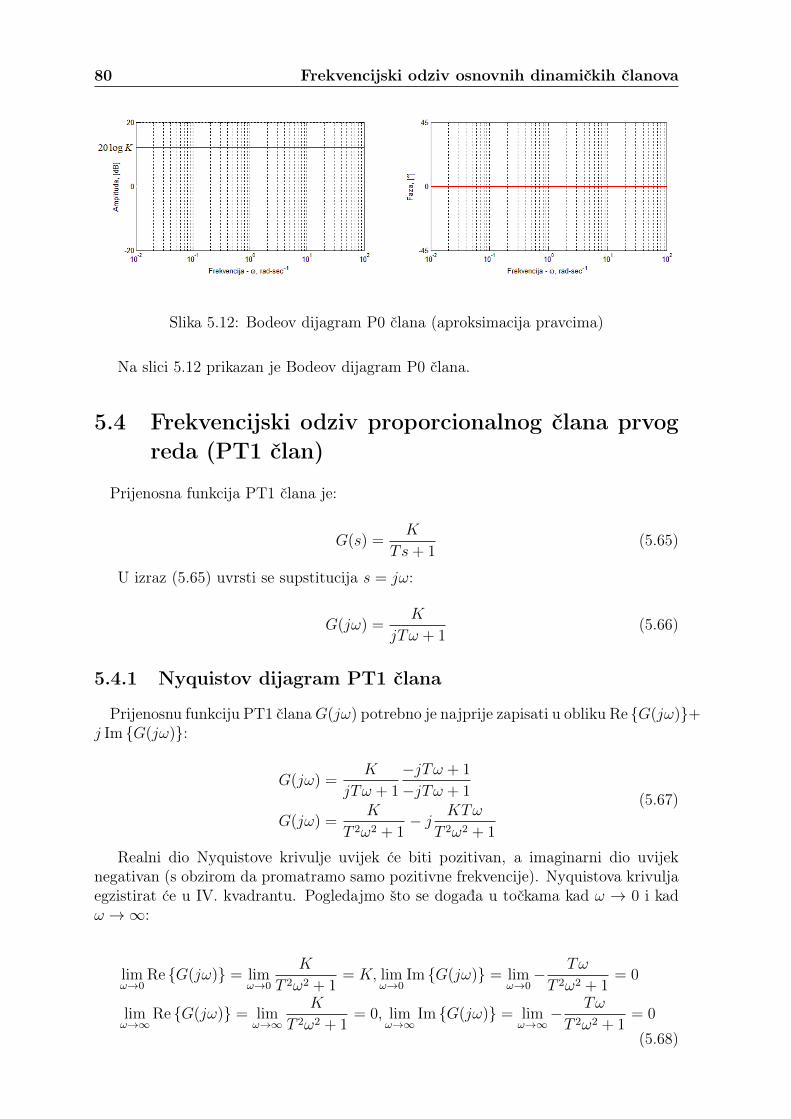
80 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.12: Bodeov dijagram P0 člana (aproksimacija pravcima)
Na slici 5.12 prikazan je Bodeov dijagram P0 člana.
5.4 Frekvencijski odziv proporcionalnog člana prvogreda (PT1 član)
Prijenosna funkcija PT1 člana je:
G(s) =K
Ts+ 1(5.65)
U izraz (5.65) uvrsti se supstitucija s = jω:
G(jω) =K
jTω + 1(5.66)
5.4.1 Nyquistov dijagram PT1 člana
Prijenosnu funkciju PT1 članaG(jω) potrebno je najprije zapisati u obliku Re G(jω)+j Im G(jω):
G(jω) =K
jTω + 1
−jTω + 1
−jTω + 1
G(jω) =K
T 2ω2 + 1− j KTω
T 2ω2 + 1
(5.67)
Realni dio Nyquistove krivulje uvijek će biti pozitivan, a imaginarni dio uvijeknegativan (s obzirom da promatramo samo pozitivne frekvencije). Nyquistova krivuljaegzistirat će u IV. kvadrantu. Pogledajmo što se događa u točkama kad ω → 0 i kadω →∞:
limω→0
Re G(jω) = limω→0
K
T 2ω2 + 1= K, lim
ω→0Im G(jω) = lim
ω→0− Tω
T 2ω2 + 1= 0
limω→∞
Re G(jω) = limω→∞
K
T 2ω2 + 1= 0, lim
ω→∞Im G(jω) = lim
ω→∞− Tω
T 2ω2 + 1= 0
(5.68)
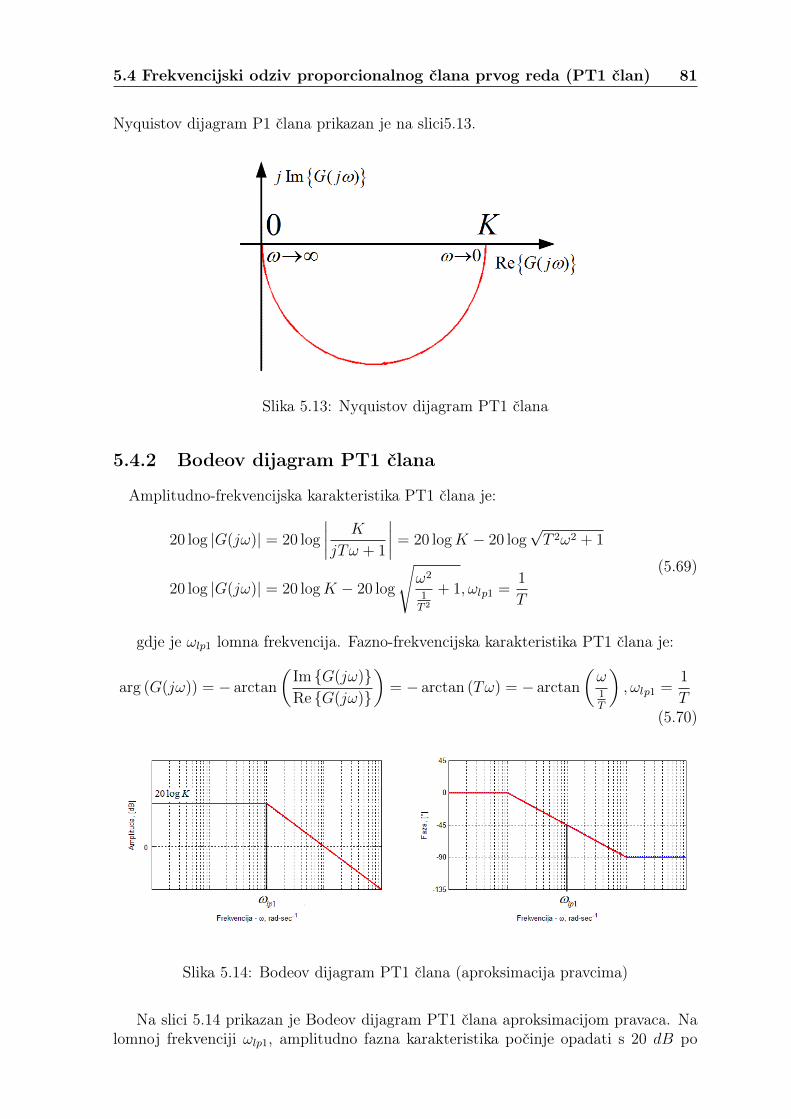
5.4 Frekvencijski odziv proporcionalnog člana prvog reda (PT1 član) 81
Nyquistov dijagram P1 člana prikazan je na slici5.13.
Slika 5.13: Nyquistov dijagram PT1 člana
5.4.2 Bodeov dijagram PT1 člana
Amplitudno-frekvencijska karakteristika PT1 člana je:
20 log |G(jω)| = 20 log
∣∣∣∣ K
jTω + 1
∣∣∣∣ = 20 logK − 20 log√T 2ω2 + 1
20 log |G(jω)| = 20 logK − 20 log
√ω2
1T 2
+ 1, ωlp1 =1
T
(5.69)
gdje je ωlp1 lomna frekvencija. Fazno-frekvencijska karakteristika PT1 člana je:
arg (G(jω)) = − arctan
(Im G(jω)Re G(jω)
)= − arctan (Tω) = − arctan
(ω1T
), ωlp1 =
1
T(5.70)
Slika 5.14: Bodeov dijagram PT1 člana (aproksimacija pravcima)
Na slici 5.14 prikazan je Bodeov dijagram PT1 člana aproksimacijom pravaca. Nalomnoj frekvenciji ωlp1, amplitudno fazna karakteristika počinje opadati s 20 dB po
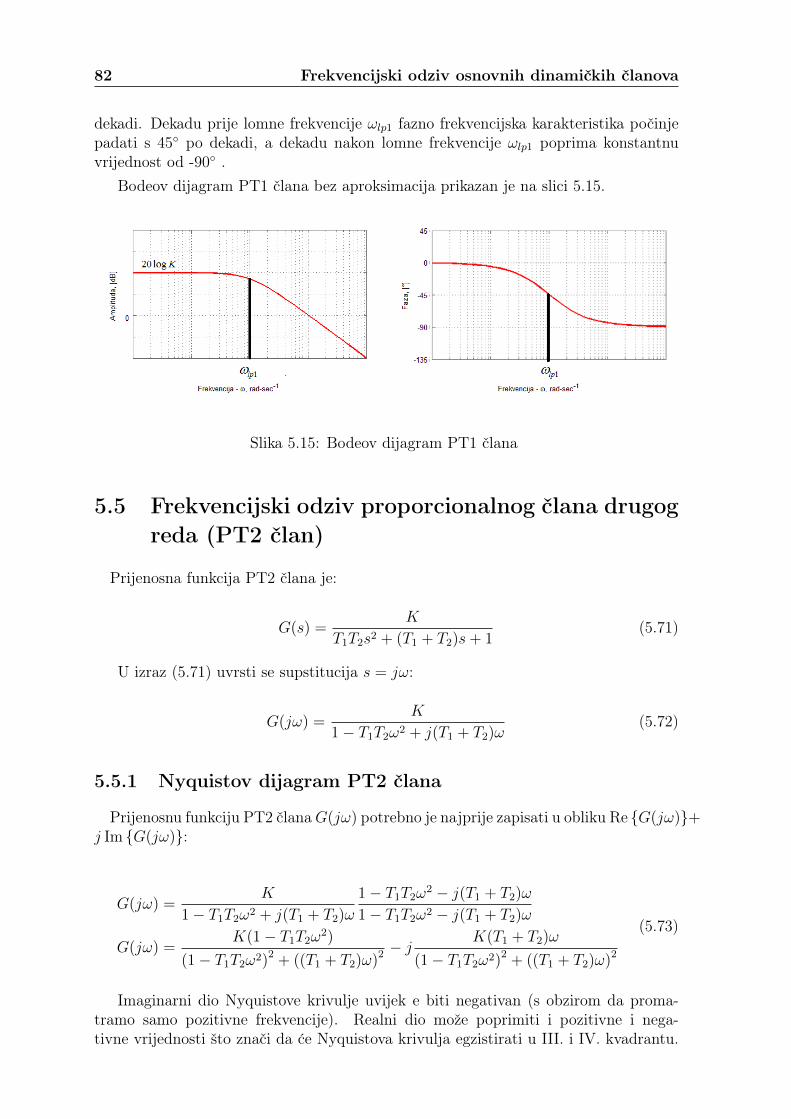
82 Frekvencijski odziv osnovnih dinamičkih članova
dekadi. Dekadu prije lomne frekvencije ωlp1 fazno frekvencijska karakteristika počinjepadati s 45 po dekadi, a dekadu nakon lomne frekvencije ωlp1 poprima konstantnuvrijednost od -90 .
Bodeov dijagram PT1 člana bez aproksimacija prikazan je na slici 5.15.
Slika 5.15: Bodeov dijagram PT1 člana
5.5 Frekvencijski odziv proporcionalnog člana drugogreda (PT2 član)
Prijenosna funkcija PT2 člana je:
G(s) =K
T1T2s2 + (T1 + T2)s+ 1(5.71)
U izraz (5.71) uvrsti se supstitucija s = jω:
G(jω) =K
1− T1T2ω2 + j(T1 + T2)ω(5.72)
5.5.1 Nyquistov dijagram PT2 člana
Prijenosnu funkciju PT2 članaG(jω) potrebno je najprije zapisati u obliku Re G(jω)+j Im G(jω):
G(jω) =K
1− T1T2ω2 + j(T1 + T2)ω
1− T1T2ω2 − j(T1 + T2)ω
1− T1T2ω2 − j(T1 + T2)ω
G(jω) =K(1− T1T2ω2)
(1− T1T2ω2)2 + ((T1 + T2)ω)2− j K(T1 + T2)ω
(1− T1T2ω2)2 + ((T1 + T2)ω)2
(5.73)
Imaginarni dio Nyquistove krivulje uvijek e biti negativan (s obzirom da proma-tramo samo pozitivne frekvencije). Realni dio može poprimiti i pozitivne i nega-tivne vrijednosti što znači da će Nyquistova krivulja egzistirati u III. i IV. kvadrantu.
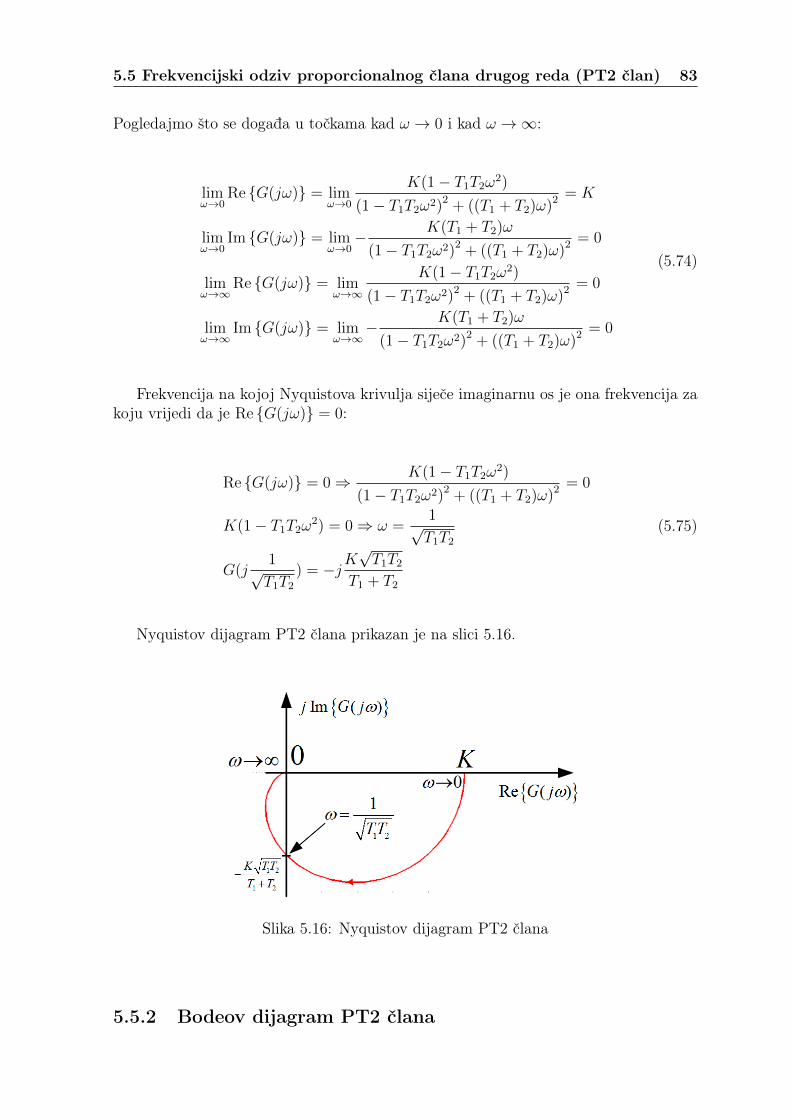
5.5 Frekvencijski odziv proporcionalnog člana drugog reda (PT2 član) 83
Pogledajmo što se događa u točkama kad ω → 0 i kad ω →∞:
limω→0
Re G(jω) = limω→0
K(1− T1T2ω2)
(1− T1T2ω2)2 + ((T1 + T2)ω)2= K
limω→0
Im G(jω) = limω→0− K(T1 + T2)ω
(1− T1T2ω2)2 + ((T1 + T2)ω)2= 0
limω→∞
Re G(jω) = limω→∞
K(1− T1T2ω2)
(1− T1T2ω2)2 + ((T1 + T2)ω)2= 0
limω→∞
Im G(jω) = limω→∞
− K(T1 + T2)ω
(1− T1T2ω2)2 + ((T1 + T2)ω)2= 0
(5.74)
Frekvencija na kojoj Nyquistova krivulja siječe imaginarnu os je ona frekvencija zakoju vrijedi da je Re G(jω) = 0:
Re G(jω) = 0⇒ K(1− T1T2ω2)
(1− T1T2ω2)2 + ((T1 + T2)ω)2= 0
K(1− T1T2ω2) = 0⇒ ω =1√T1T2
G(j1√T1T2
) = −jK√T1T2
T1 + T2
(5.75)
Nyquistov dijagram PT2 člana prikazan je na slici 5.16.
Slika 5.16: Nyquistov dijagram PT2 člana
5.5.2 Bodeov dijagram PT2 člana
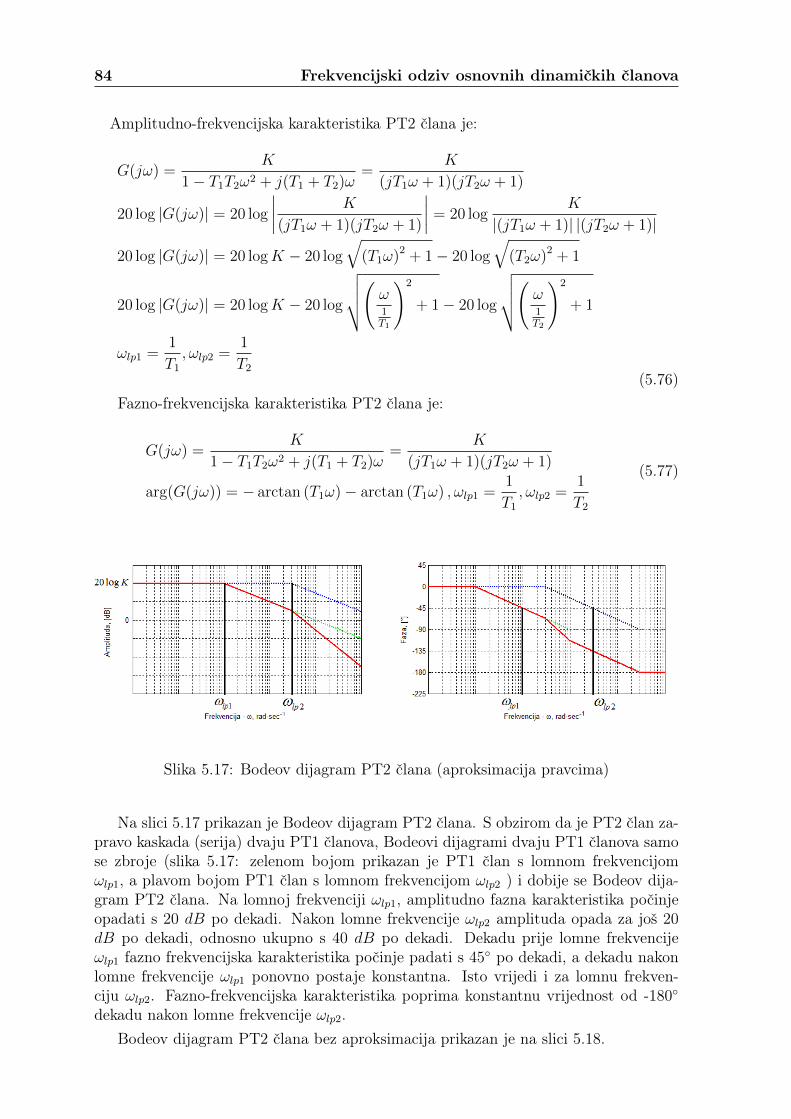
84 Frekvencijski odziv osnovnih dinamičkih članova
Amplitudno-frekvencijska karakteristika PT2 člana je:
G(jω) =K
1− T1T2ω2 + j(T1 + T2)ω=
K
(jT1ω + 1)(jT2ω + 1)
20 log |G(jω)| = 20 log
∣∣∣∣ K
(jT1ω + 1)(jT2ω + 1)
∣∣∣∣ = 20 logK
|(jT1ω + 1)| |(jT2ω + 1)|
20 log |G(jω)| = 20 logK − 20 log
√(T1ω)2 + 1− 20 log
√(T2ω)2 + 1
20 log |G(jω)| = 20 logK − 20 log
√√√√( ω1T1
)2
+ 1− 20 log
√√√√( ω1T2
)2
+ 1
ωlp1 =1
T1, ωlp2 =
1
T2(5.76)
Fazno-frekvencijska karakteristika PT2 člana je:
G(jω) =K
1− T1T2ω2 + j(T1 + T2)ω=
K
(jT1ω + 1)(jT2ω + 1)
arg(G(jω)) = − arctan (T1ω)− arctan (T1ω) , ωlp1 =1
T1, ωlp2 =
1
T2
(5.77)
Slika 5.17: Bodeov dijagram PT2 člana (aproksimacija pravcima)
Na slici 5.17 prikazan je Bodeov dijagram PT2 člana. S obzirom da je PT2 član za-pravo kaskada (serija) dvaju PT1 članova, Bodeovi dijagrami dvaju PT1 članova samose zbroje (slika 5.17: zelenom bojom prikazan je PT1 član s lomnom frekvencijomωlp1, a plavom bojom PT1 član s lomnom frekvencijom ωlp2 ) i dobije se Bodeov dija-gram PT2 člana. Na lomnoj frekvenciji ωlp1, amplitudno fazna karakteristika počinjeopadati s 20 dB po dekadi. Nakon lomne frekvencije ωlp2 amplituda opada za još 20dB po dekadi, odnosno ukupno s 40 dB po dekadi. Dekadu prije lomne frekvencijeωlp1 fazno frekvencijska karakteristika počinje padati s 45 po dekadi, a dekadu nakonlomne frekvencije ωlp1 ponovno postaje konstantna. Isto vrijedi i za lomnu frekven-ciju ωlp2. Fazno-frekvencijska karakteristika poprima konstantnu vrijednost od -180dekadu nakon lomne frekvencije ωlp2.
Bodeov dijagram PT2 člana bez aproksimacija prikazan je na slici 5.18.
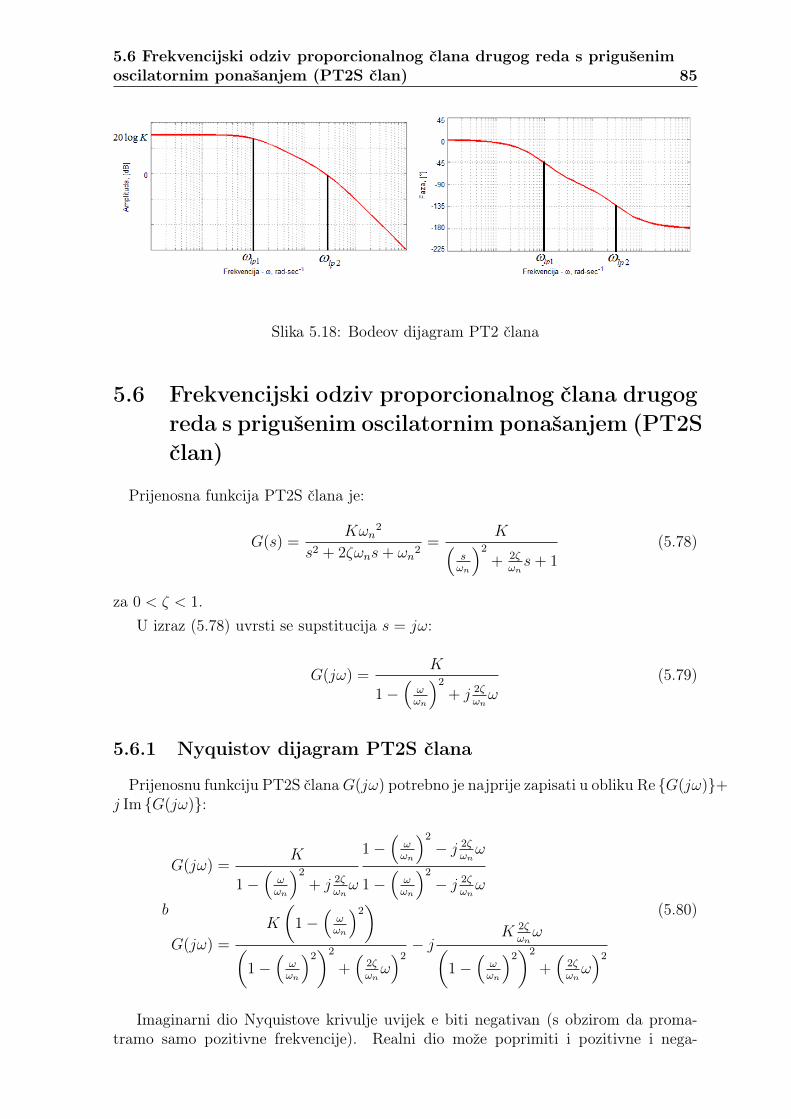
5.6 Frekvencijski odziv proporcionalnog člana drugog reda s prigušenimoscilatornim ponašanjem (PT2S član) 85
Slika 5.18: Bodeov dijagram PT2 člana
5.6 Frekvencijski odziv proporcionalnog člana drugogreda s prigušenim oscilatornim ponašanjem (PT2Sčlan)
Prijenosna funkcija PT2S člana je:
G(s) =Kωn
2
s2 + 2ζωns+ ωn2=
K(sωn
)2+ 2ζ
ωns+ 1
(5.78)
za 0 < ζ < 1.U izraz (5.78) uvrsti se supstitucija s = jω:
G(jω) =K
1−(ωωn
)2+ j 2ζ
ωnω
(5.79)
5.6.1 Nyquistov dijagram PT2S člana
Prijenosnu funkciju PT2S članaG(jω) potrebno je najprije zapisati u obliku Re G(jω)+j Im G(jω):
b
G(jω) =K
1−(ωωn
)2+ j 2ζ
ωnω
1−(ωωn
)2− j 2ζ
ωnω
1−(ωωn
)2− j 2ζ
ωnω
G(jω) =
K
(1−
(ωωn
)2)(
1−(ωωn
)2)2
+(
2ζωnω)2 − j K 2ζ
ωnω(
1−(ωωn
)2)2
+(
2ζωnω)2
(5.80)
Imaginarni dio Nyquistove krivulje uvijek e biti negativan (s obzirom da proma-tramo samo pozitivne frekvencije). Realni dio može poprimiti i pozitivne i nega-
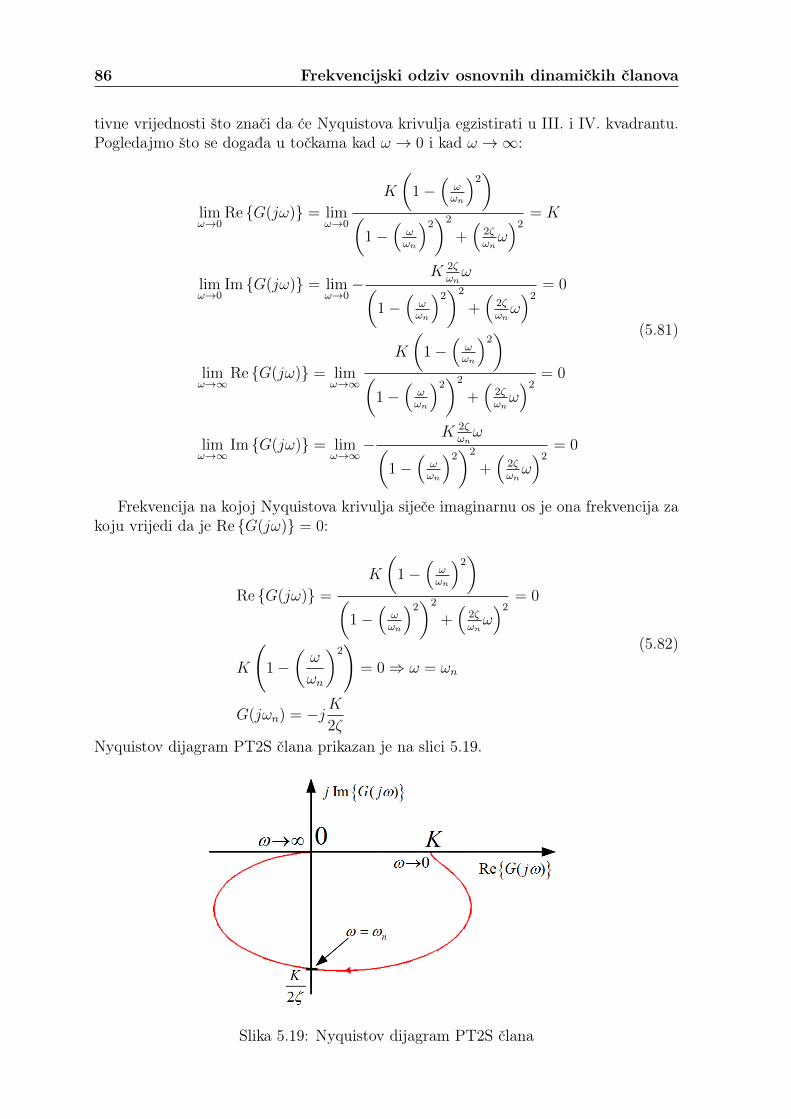
86 Frekvencijski odziv osnovnih dinamičkih članova
tivne vrijednosti što znači da će Nyquistova krivulja egzistirati u III. i IV. kvadrantu.Pogledajmo što se događa u točkama kad ω → 0 i kad ω →∞:
limω→0
Re G(jω) = limω→0
K
(1−
(ωωn
)2)(
1−(ωωn
)2)2
+(
2ζωnω)2 = K
limω→0
Im G(jω) = limω→0−
K 2ζωnω(
1−(ωωn
)2)2
+(
2ζωnω)2 = 0
limω→∞
Re G(jω) = limω→∞
K
(1−
(ωωn
)2)(
1−(ωωn
)2)2
+(
2ζωnω)2 = 0
limω→∞
Im G(jω) = limω→∞
−K 2ζ
ωnω(
1−(ωωn
)2)2
+(
2ζωnω)2 = 0
(5.81)
Frekvencija na kojoj Nyquistova krivulja siječe imaginarnu os je ona frekvencija zakoju vrijedi da je Re G(jω) = 0:
Re G(jω) =
K
(1−
(ωωn
)2)(
1−(ωωn
)2)2
+(
2ζωnω)2 = 0
K
(1−
(ω
ωn
)2)
= 0⇒ ω = ωn
G(jωn) = −j K2ζ
(5.82)
Nyquistov dijagram PT2S člana prikazan je na slici 5.19.
Slika 5.19: Nyquistov dijagram PT2S člana

5.6 Frekvencijski odziv proporcionalnog člana drugog reda s prigušenimoscilatornim ponašanjem (PT2S član) 87
5.6.2 Bodeov dijagram PT2S člana
Amplitudno-frekvencijska karakteristika PT2S člana je:
20 log |G(jω)| = 20 log
∣∣∣∣∣∣∣K
1−(ωωn
)2+ j 2ζ
ωnω
∣∣∣∣∣∣∣20 log |G(jω)| = 20 logK − 20 log
√√√√(1−(ω
ωn
)2)2
+
(2ζ
ωnω
)2
(5.83)
Kod PT2S članova pristup crtanja Bodeovih dijagram je nešto drugačiji od pristupagdje se prijenosna funkcija može opisati kaskadom (serijom) PT1 članova. Imat ćemoponovno dva slučaja, jedan kada frekvencije puno manje od lomne frekvencije (ω ωl),i jedan kada su frekvencije puno veće od lomne frekvencije (ω ωl).
Za frekvencije ω ωl vrijedi:
20 logK − 20 log
√√√√(1−(ω
ωn
)2)2
+
(2ζ
ωnω
)2
≈ 20 logK (5.84)
Za frekvencije ω ωl vrijedi:
20 logK − 20 log
√√√√(1−(ω
ωn
)2)2
+
(2ζ
ωnω
)2
≈ 20 logK − 20 log
(ω
ωn
)2
=
= 20 logK − 40 logω
ωn
(5.85)
Iz izraza (5.85) vidi se da amplituda pada za 40 dB po dekadi nakon lomne frekvencije.Ako izjednačimo izraze (5.84) i (5.85) dobit ćemo izraz za lomnu frekvenciju, odnosnofrekvenciju gdje se sijeku dva pravca:
20 logK = 20 logK − 40 logω
ωn⇒ 40 log
ω
ωn= 0⇒
⇒ logω
ωn= 0⇒ ω
ωn= 1⇒ ω = ωn
(5.86)
Iz izraza (5.86) lomna frekvencija jednaka je prirodnoj frekvenciji ωn. U okolišulomne frekvencije ωn pojavljuje se tzv. rezonantno izdizanje Mr koje ovisi o stupnjuprigušenja ζ. Frekvencija na kojoj se javlja rezonantno izdizanje nazvat ćemo rezonant-nom frekvencijom. Izraz za rezonantnu frekvenciju dobit ćemo traženjem maksimuma

88 Frekvencijski odziv osnovnih dinamičkih članova
amplitudno-fazne karakteristike. Deriviranjem izraza (5.83) dobije se:
d
dω
20 logK − 20 log
√√√√(1−(ω
ωn
)2)2
+
(2ζ
ωnω
)2
= 0
− 20
ln 10
12
(−4
((1−
(ωωn
)2)ωωn2
)+ 2(
2ζωn
)2ω
)(
1−(ωωn
)2)2
+(
2ζωnω)2 = 0
−4
((1−
(ω
ωn
)2)
ω
ωn2
)+ 2
(2ζ
ωn
)2
ω = 0⇒ 1−(ω
ωn
)2
= 2ζ2
∣∣∣∣∣ω=ωr
⇒
ωr = ωn√
1− 2ζ2
(5.87)
Ako od izraza (5.83) oduzmemo komponentu pojačanja 20 logK, dobit ćemo rezo-nantno izdizanje Mr:
Mr [dB] = −20 log
√√√√(1−(ω
ωn
)2)2
+
(2ζ
ωnω
)2
∣∣∣∣∣∣∣ω=ωr
= −20 log(2ζ√
1− ζ2) (5.88)
Iz izraza (5.88) možemo zaključiti da rezonantno izdizanje ovisi samo o faktoruprigušenja ζ. Sada možemo odrediti i za koje ζ će postojati rezonantno izdizanje,odnosno kad je ono veće od 0:
−20 log(2ζ√
1− ζ2) > 0⇒ log(2ζ√
1− ζ2) 6 0⇒ (2ζ√
1− ζ2) 6 1⇒ ζ 6
√2
2(5.89)
S obzirom da je za stabilne sustave16 vrijedi da je ζ ≥ 0 vrijedi da će se rezo-nantno izdizanje pojavljivati za 0 6 ζ 6 0.707. Kod crtanja Bodeovih dijagramaPT2S članova potrebno je odrediti rezonantnu frekvenciju i rezonantno izdizanje te ihnacrtati u obliku okomitog pravca s kružićem na vrhu, a visina tog pravca na rezo-nantnoj frekvenciji biti će jednaka iznosu rezonantnog izdizanja (detaljnije kod crtanjaBodeovog dijagrama PT2S člana).
Fazno-frekvencijska karakteristika PT2S člana je:
arg(G(jω)) = − arctan
2ζωnω
1−(ωωn
)2 (5.90)
Za frekvencije ω ωl vrijedi:
arg(G(jω)) = − arctan
2ζωnω
1−(ωωn
)2 ≈ 0 (5.91)
16O stabilnosti sustava nešto kasnije
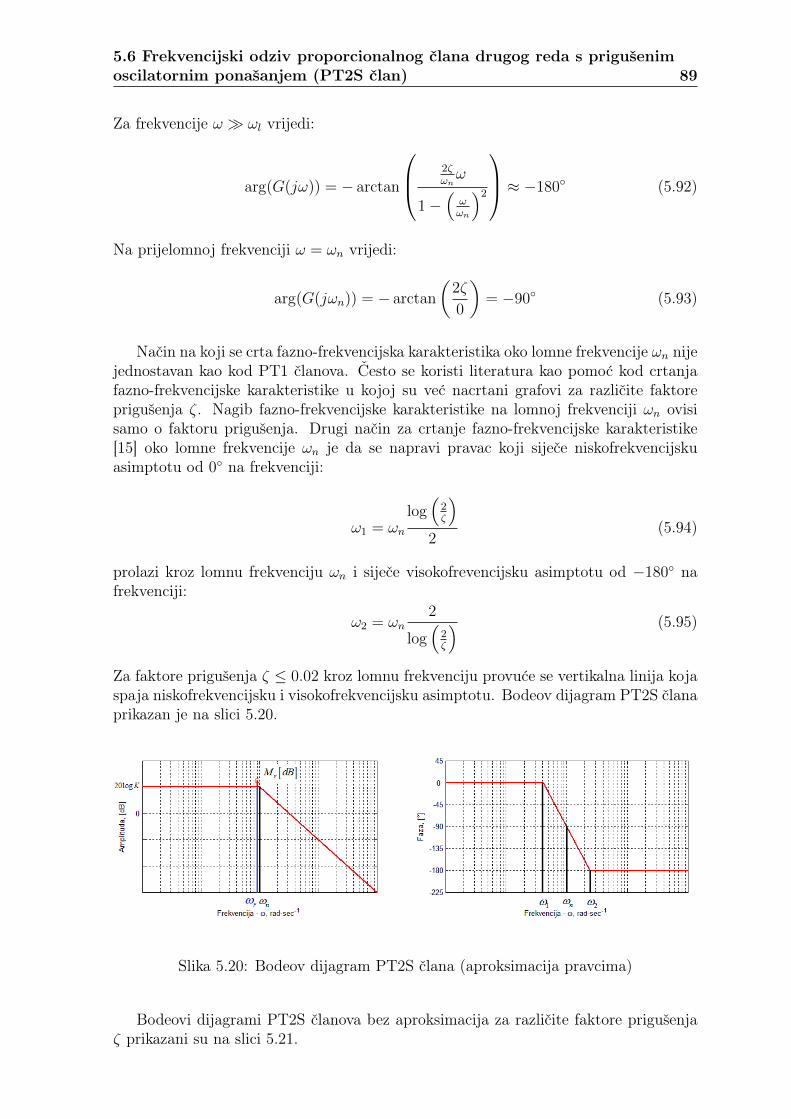
5.6 Frekvencijski odziv proporcionalnog člana drugog reda s prigušenimoscilatornim ponašanjem (PT2S član) 89
Za frekvencije ω ωl vrijedi:
arg(G(jω)) = − arctan
2ζωnω
1−(ωωn
)2 ≈ −180 (5.92)
Na prijelomnoj frekvenciji ω = ωn vrijedi:
arg(G(jωn)) = − arctan
(2ζ
0
)= −90 (5.93)
Način na koji se crta fazno-frekvencijska karakteristika oko lomne frekvencije ωn nijejednostavan kao kod PT1 članova. Često se koristi literatura kao pomoć kod crtanjafazno-frekvencijske karakteristike u kojoj su već nacrtani grafovi za različite faktoreprigušenja ζ. Nagib fazno-frekvencijske karakteristike na lomnoj frekvenciji ωn ovisisamo o faktoru prigušenja. Drugi način za crtanje fazno-frekvencijske karakteristike[15] oko lomne frekvencije ωn je da se napravi pravac koji siječe niskofrekvencijskuasimptotu od 0 na frekvenciji:
ω1 = ωnlog(
2ζ
)2
(5.94)
prolazi kroz lomnu frekvenciju ωn i siječe visokofrevencijsku asimptotu od −180 nafrekvenciji:
ω2 = ωn2
log(
2ζ
) (5.95)
Za faktore prigušenja ζ ≤ 0.02 kroz lomnu frekvenciju provuće se vertikalna linija kojaspaja niskofrekvencijsku i visokofrekvencijsku asimptotu. Bodeov dijagram PT2S članaprikazan je na slici 5.20.
Slika 5.20: Bodeov dijagram PT2S člana (aproksimacija pravcima)
Bodeovi dijagrami PT2S članova bez aproksimacija za različite faktore prigušenjaζ prikazani su na slici 5.21.
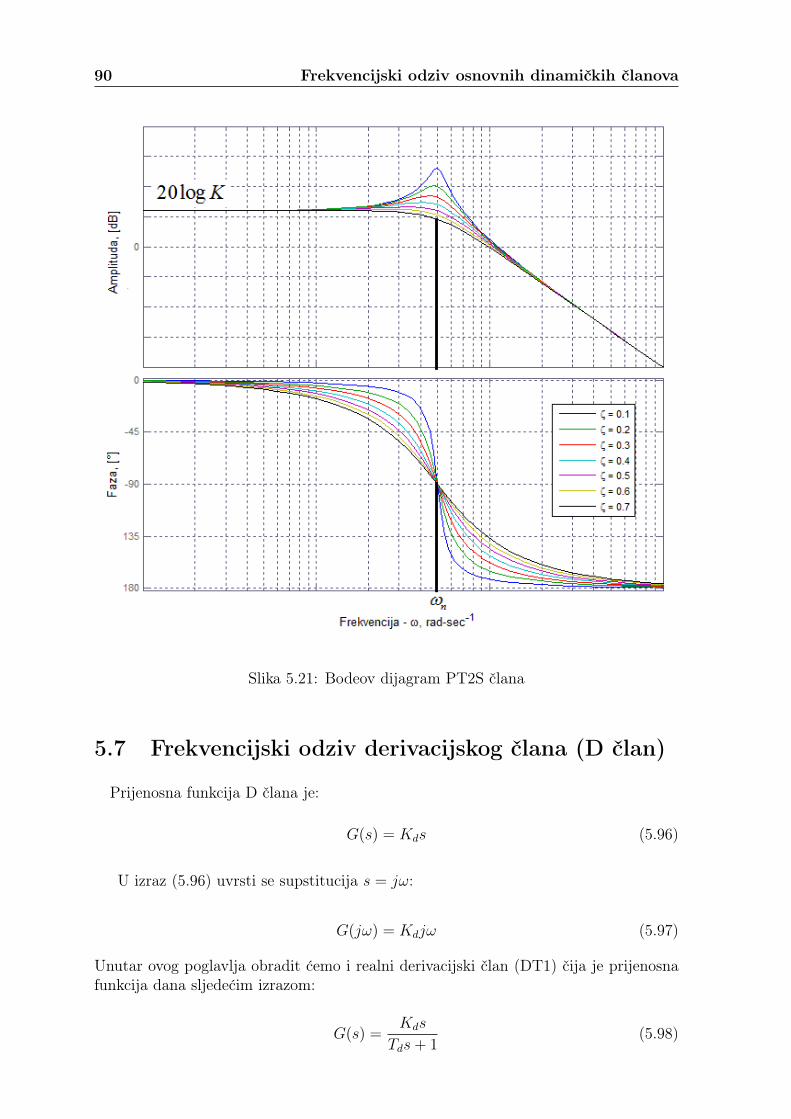
90 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.21: Bodeov dijagram PT2S člana
5.7 Frekvencijski odziv derivacijskog člana (D član)
Prijenosna funkcija D člana je:
G(s) = Kds (5.96)
U izraz (5.96) uvrsti se supstitucija s = jω:
G(jω) = Kdjω (5.97)
Unutar ovog poglavlja obradit ćemo i realni derivacijski član (DT1) čija je prijenosnafunkcija dana sljedećim izrazom:
G(s) =Kds
Tds+ 1(5.98)
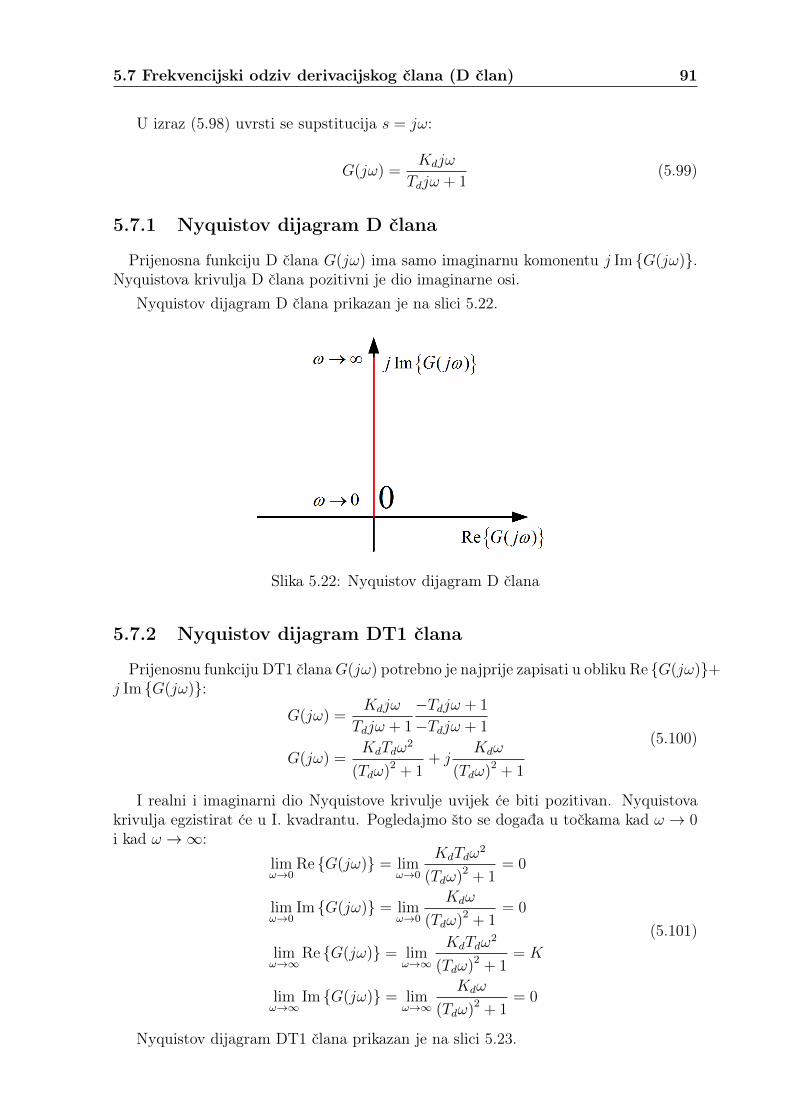
5.7 Frekvencijski odziv derivacijskog člana (D član) 91
U izraz (5.98) uvrsti se supstitucija s = jω:
G(jω) =Kdjω
Tdjω + 1(5.99)
5.7.1 Nyquistov dijagram D člana
Prijenosna funkciju D člana G(jω) ima samo imaginarnu komonentu j Im G(jω).Nyquistova krivulja D člana pozitivni je dio imaginarne osi.
Nyquistov dijagram D člana prikazan je na slici 5.22.
Slika 5.22: Nyquistov dijagram D člana
5.7.2 Nyquistov dijagram DT1 člana
Prijenosnu funkciju DT1 članaG(jω) potrebno je najprije zapisati u obliku Re G(jω)+j Im G(jω):
G(jω) =Kdjω
Tdjω + 1
−Tdjω + 1
−Tdjω + 1
G(jω) =KdTdω
2
(Tdω)2 + 1+ j
Kdω
(Tdω)2 + 1
(5.100)
I realni i imaginarni dio Nyquistove krivulje uvijek će biti pozitivan. Nyquistovakrivulja egzistirat će u I. kvadrantu. Pogledajmo što se događa u točkama kad ω → 0i kad ω →∞:
limω→0
Re G(jω) = limω→0
KdTdω2
(Tdω)2 + 1= 0
limω→0
Im G(jω) = limω→0
Kdω
(Tdω)2 + 1= 0
limω→∞
Re G(jω) = limω→∞
KdTdω2
(Tdω)2 + 1= K
limω→∞
Im G(jω) = limω→∞
Kdω
(Tdω)2 + 1= 0
(5.101)
Nyquistov dijagram DT1 člana prikazan je na slici 5.23.
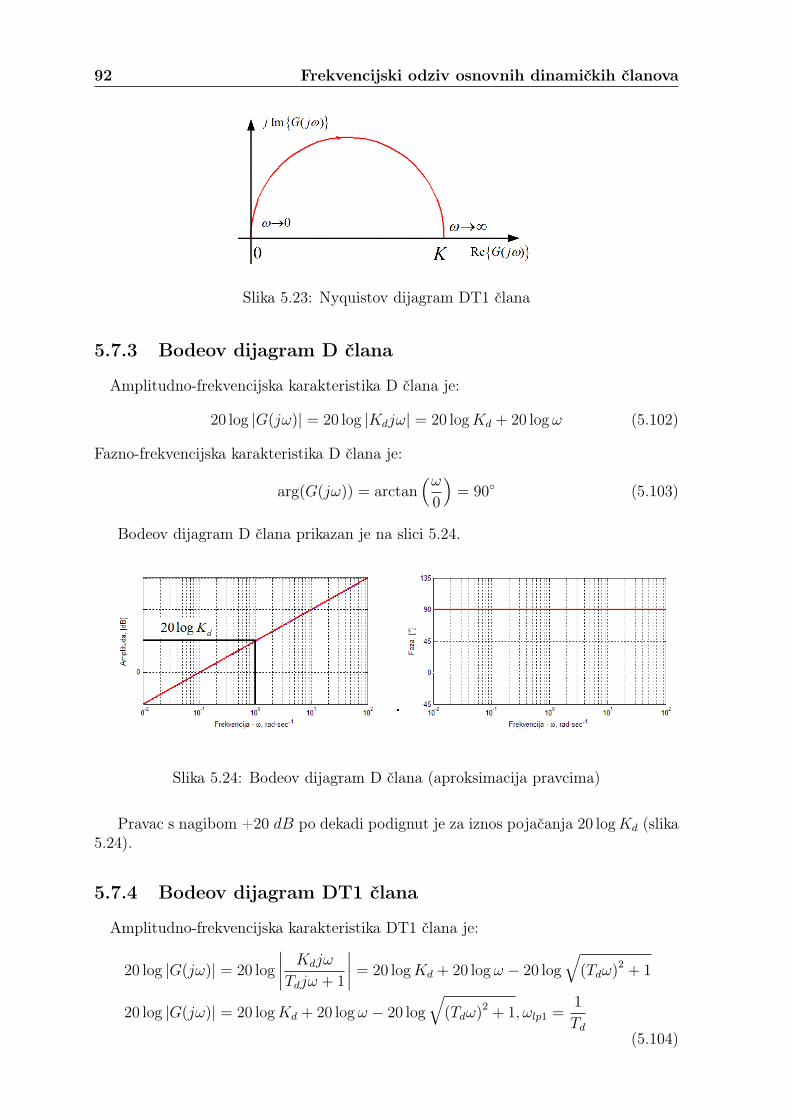
92 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.23: Nyquistov dijagram DT1 člana
5.7.3 Bodeov dijagram D člana
Amplitudno-frekvencijska karakteristika D člana je:
20 log |G(jω)| = 20 log |Kdjω| = 20 logKd + 20 logω (5.102)
Fazno-frekvencijska karakteristika D člana je:
arg(G(jω)) = arctan(ω
0
)= 90 (5.103)
Bodeov dijagram D člana prikazan je na slici 5.24.
Slika 5.24: Bodeov dijagram D člana (aproksimacija pravcima)
Pravac s nagibom +20 dB po dekadi podignut je za iznos pojačanja 20 logKd (slika5.24).
5.7.4 Bodeov dijagram DT1 člana
Amplitudno-frekvencijska karakteristika DT1 člana je:
20 log |G(jω)| = 20 log
∣∣∣∣ Kdjω
Tdjω + 1
∣∣∣∣ = 20 logKd + 20 logω − 20 log
√(Tdω)2 + 1
20 log |G(jω)| = 20 logKd + 20 logω − 20 log
√(Tdω)2 + 1, ωlp1 =
1
Td(5.104)
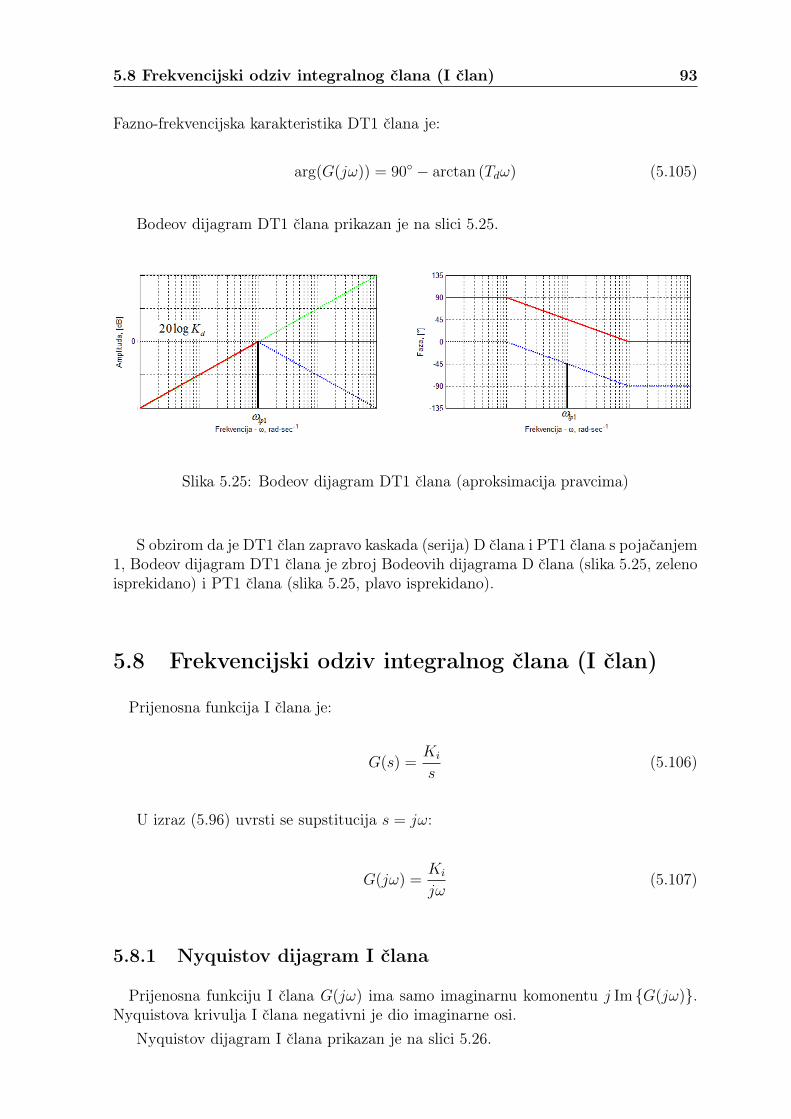
5.8 Frekvencijski odziv integralnog člana (I član) 93
Fazno-frekvencijska karakteristika DT1 člana je:
arg(G(jω)) = 90 − arctan (Tdω) (5.105)
Bodeov dijagram DT1 člana prikazan je na slici 5.25.
Slika 5.25: Bodeov dijagram DT1 člana (aproksimacija pravcima)
S obzirom da je DT1 član zapravo kaskada (serija) D člana i PT1 člana s pojačanjem1, Bodeov dijagram DT1 člana je zbroj Bodeovih dijagrama D člana (slika 5.25, zelenoisprekidano) i PT1 člana (slika 5.25, plavo isprekidano).
5.8 Frekvencijski odziv integralnog člana (I član)
Prijenosna funkcija I člana je:
G(s) =Ki
s(5.106)
U izraz (5.96) uvrsti se supstitucija s = jω:
G(jω) =Ki
jω(5.107)
5.8.1 Nyquistov dijagram I člana
Prijenosna funkciju I člana G(jω) ima samo imaginarnu komonentu j Im G(jω).Nyquistova krivulja I člana negativni je dio imaginarne osi.
Nyquistov dijagram I člana prikazan je na slici 5.26.
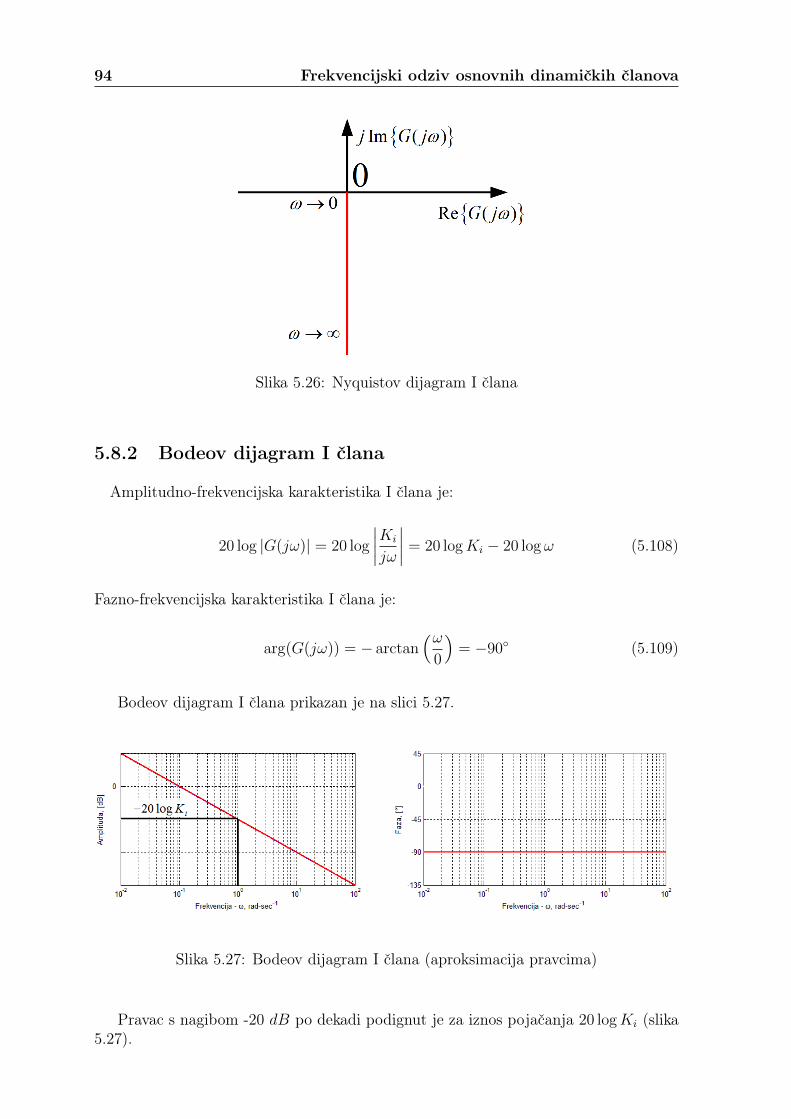
94 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.26: Nyquistov dijagram I člana
5.8.2 Bodeov dijagram I člana
Amplitudno-frekvencijska karakteristika I člana je:
20 log |G(jω)| = 20 log
∣∣∣∣Ki
jω
∣∣∣∣ = 20 logKi − 20 logω (5.108)
Fazno-frekvencijska karakteristika I člana je:
arg(G(jω)) = − arctan(ω
0
)= −90 (5.109)
Bodeov dijagram I člana prikazan je na slici 5.27.
Slika 5.27: Bodeov dijagram I člana (aproksimacija pravcima)
Pravac s nagibom -20 dB po dekadi podignut je za iznos pojačanja 20 logKi (slika5.27).
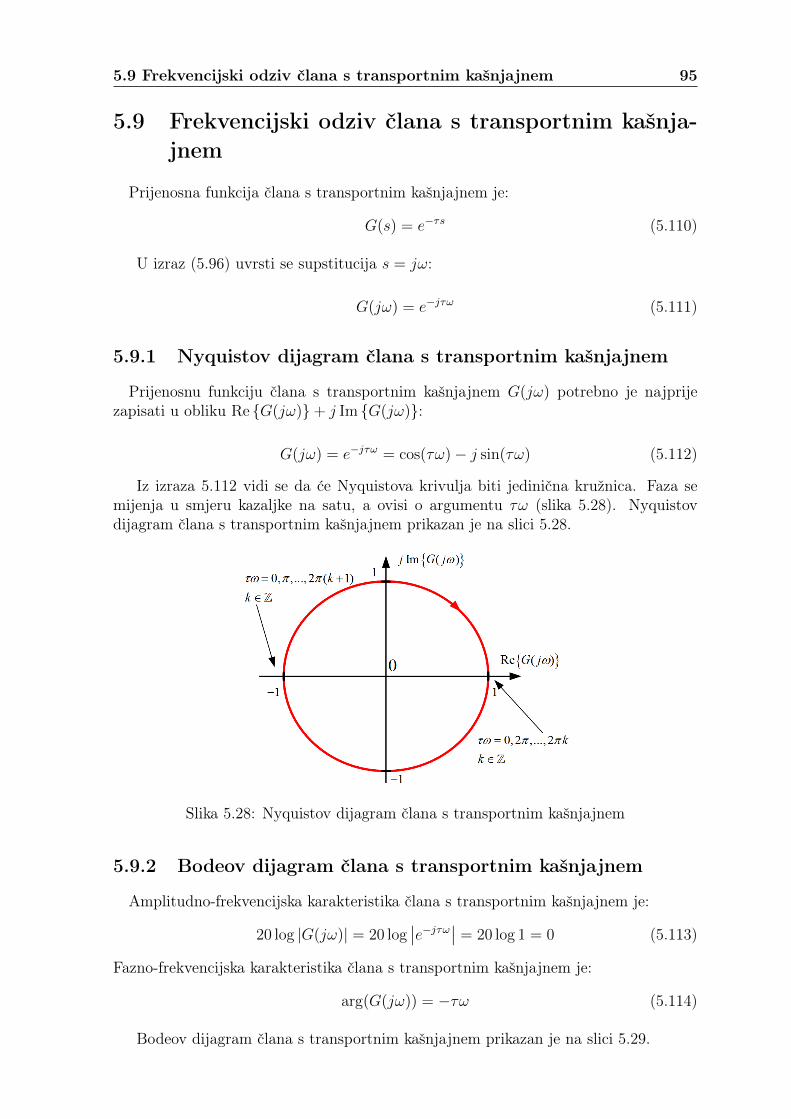
5.9 Frekvencijski odziv člana s transportnim kašnjajnem 95
5.9 Frekvencijski odziv člana s transportnim kašnja-jnem
Prijenosna funkcija člana s transportnim kašnjajnem je:
G(s) = e−τs (5.110)
U izraz (5.96) uvrsti se supstitucija s = jω:
G(jω) = e−jτω (5.111)
5.9.1 Nyquistov dijagram člana s transportnim kašnjajnem
Prijenosnu funkciju člana s transportnim kašnjajnem G(jω) potrebno je najprijezapisati u obliku Re G(jω)+ j Im G(jω):
G(jω) = e−jτω = cos(τω)− j sin(τω) (5.112)
Iz izraza 5.112 vidi se da će Nyquistova krivulja biti jedinična kružnica. Faza semijenja u smjeru kazaljke na satu, a ovisi o argumentu τω (slika 5.28). Nyquistovdijagram člana s transportnim kašnjajnem prikazan je na slici 5.28.
Slika 5.28: Nyquistov dijagram člana s transportnim kašnjajnem
5.9.2 Bodeov dijagram člana s transportnim kašnjajnem
Amplitudno-frekvencijska karakteristika člana s transportnim kašnjajnem je:
20 log |G(jω)| = 20 log∣∣e−jτω∣∣ = 20 log 1 = 0 (5.113)
Fazno-frekvencijska karakteristika člana s transportnim kašnjajnem je:
arg(G(jω)) = −τω (5.114)
Bodeov dijagram člana s transportnim kašnjajnem prikazan je na slici 5.29.
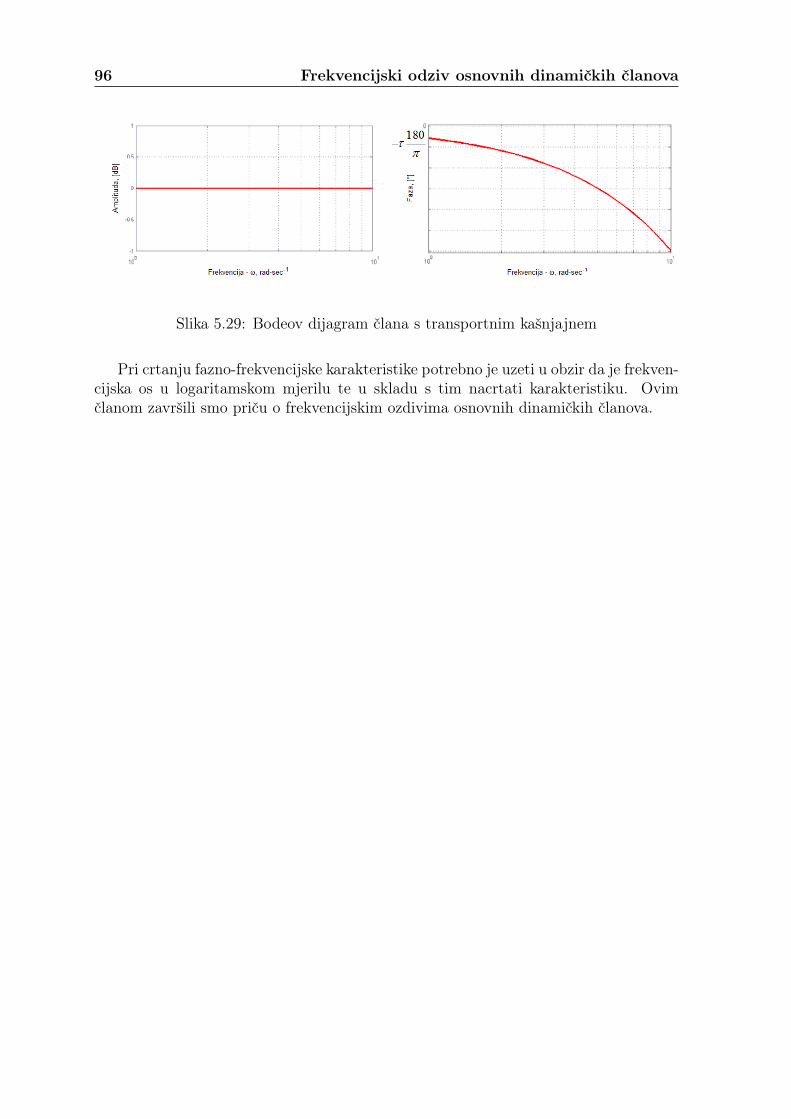
96 Frekvencijski odziv osnovnih dinamičkih članova
Slika 5.29: Bodeov dijagram člana s transportnim kašnjajnem
Pri crtanju fazno-frekvencijske karakteristike potrebno je uzeti u obzir da je frekven-cijska os u logaritamskom mjerilu te u skladu s tim nacrtati karakteristiku. Ovimčlanom završili smo priču o frekvencijskim ozdivima osnovnih dinamičkih članova.
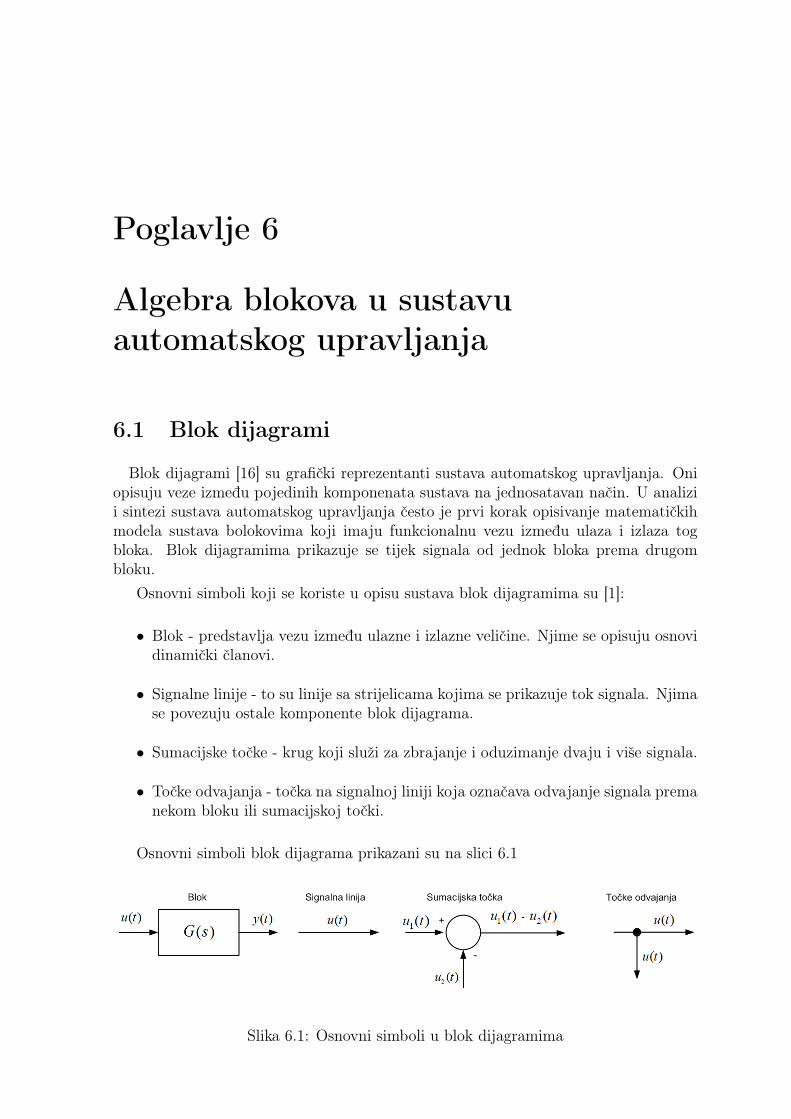
Poglavlje 6
Algebra blokova u sustavuautomatskog upravljanja
6.1 Blok dijagrami
Blok dijagrami [16] su grafički reprezentanti sustava automatskog upravljanja. Oniopisuju veze između pojedinih komponenata sustava na jednosatavan način. U analizii sintezi sustava automatskog upravljanja često je prvi korak opisivanje matematičkihmodela sustava bolokovima koji imaju funkcionalnu vezu između ulaza i izlaza togbloka. Blok dijagramima prikazuje se tijek signala od jednok bloka prema drugombloku.
Osnovni simboli koji se koriste u opisu sustava blok dijagramima su [1]:
• Blok - predstavlja vezu između ulazne i izlazne veličine. Njime se opisuju osnovidinamički članovi.
• Signalne linije - to su linije sa strijelicama kojima se prikazuje tok signala. Njimase povezuju ostale komponente blok dijagrama.
• Sumacijske točke - krug koji služi za zbrajanje i oduzimanje dvaju i više signala.
• Točke odvajanja - točka na signalnoj liniji koja označava odvajanje signala premanekom bloku ili sumacijskoj točki.
Osnovni simboli blok dijagrama prikazani su na slici 6.1
Slika 6.1: Osnovni simboli u blok dijagramima
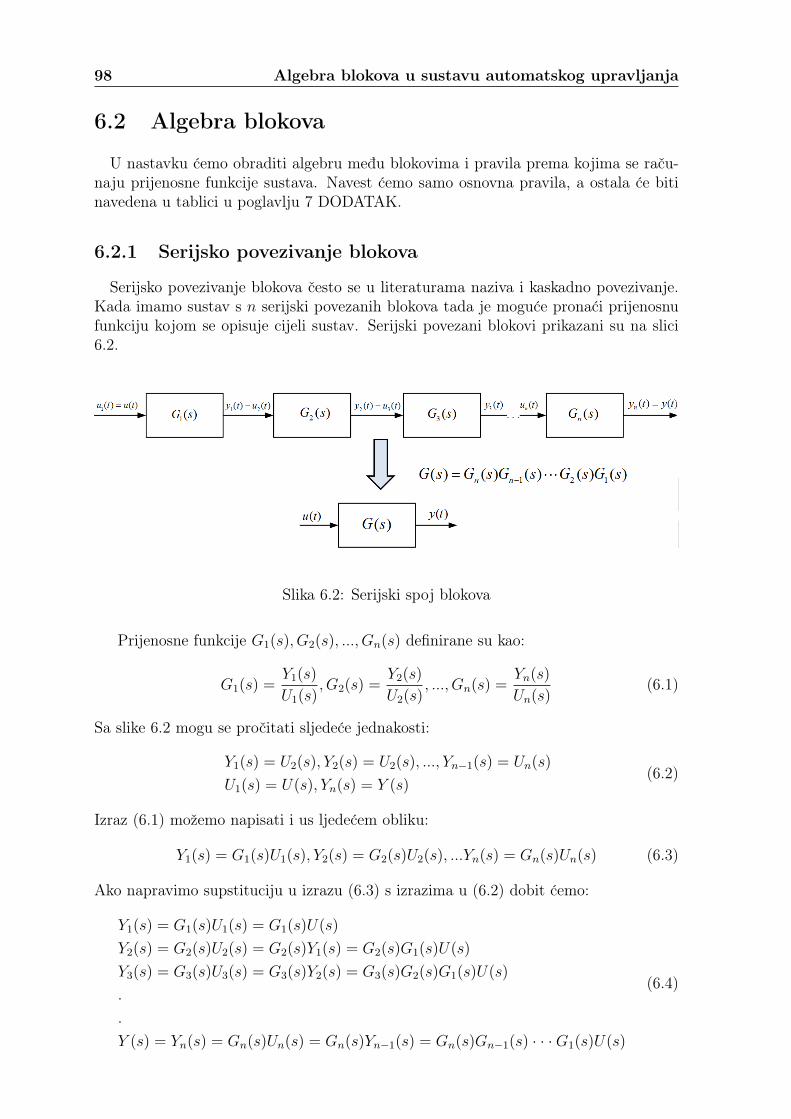
98 Algebra blokova u sustavu automatskog upravljanja
6.2 Algebra blokova
U nastavku ćemo obraditi algebru među blokovima i pravila prema kojima se raču-naju prijenosne funkcije sustava. Navest ćemo samo osnovna pravila, a ostala će bitinavedena u tablici u poglavlju 7 DODATAK.
6.2.1 Serijsko povezivanje blokova
Serijsko povezivanje blokova često se u literaturama naziva i kaskadno povezivanje.Kada imamo sustav s n serijski povezanih blokova tada je moguće pronaći prijenosnufunkciju kojom se opisuje cijeli sustav. Serijski povezani blokovi prikazani su na slici6.2.
Slika 6.2: Serijski spoj blokova
Prijenosne funkcije G1(s), G2(s), ..., Gn(s) definirane su kao:
G1(s) =Y1(s)
U1(s), G2(s) =
Y2(s)
U2(s), ..., Gn(s) =
Yn(s)
Un(s)(6.1)
Sa slike 6.2 mogu se pročitati sljedeće jednakosti:
Y1(s) = U2(s), Y2(s) = U2(s), ..., Yn−1(s) = Un(s)
U1(s) = U(s), Yn(s) = Y (s)(6.2)
Izraz (6.1) možemo napisati i us ljedećem obliku:
Y1(s) = G1(s)U1(s), Y2(s) = G2(s)U2(s), ...Yn(s) = Gn(s)Un(s) (6.3)
Ako napravimo supstituciju u izrazu (6.3) s izrazima u (6.2) dobit ćemo:
Y1(s) = G1(s)U1(s) = G1(s)U(s)
Y2(s) = G2(s)U2(s) = G2(s)Y1(s) = G2(s)G1(s)U(s)
Y3(s) = G3(s)U3(s) = G3(s)Y2(s) = G3(s)G2(s)G1(s)U(s)
.
.
Y (s) = Yn(s) = Gn(s)Un(s) = Gn(s)Yn−1(s) = Gn(s)Gn−1(s) · · ·G1(s)U(s)
(6.4)
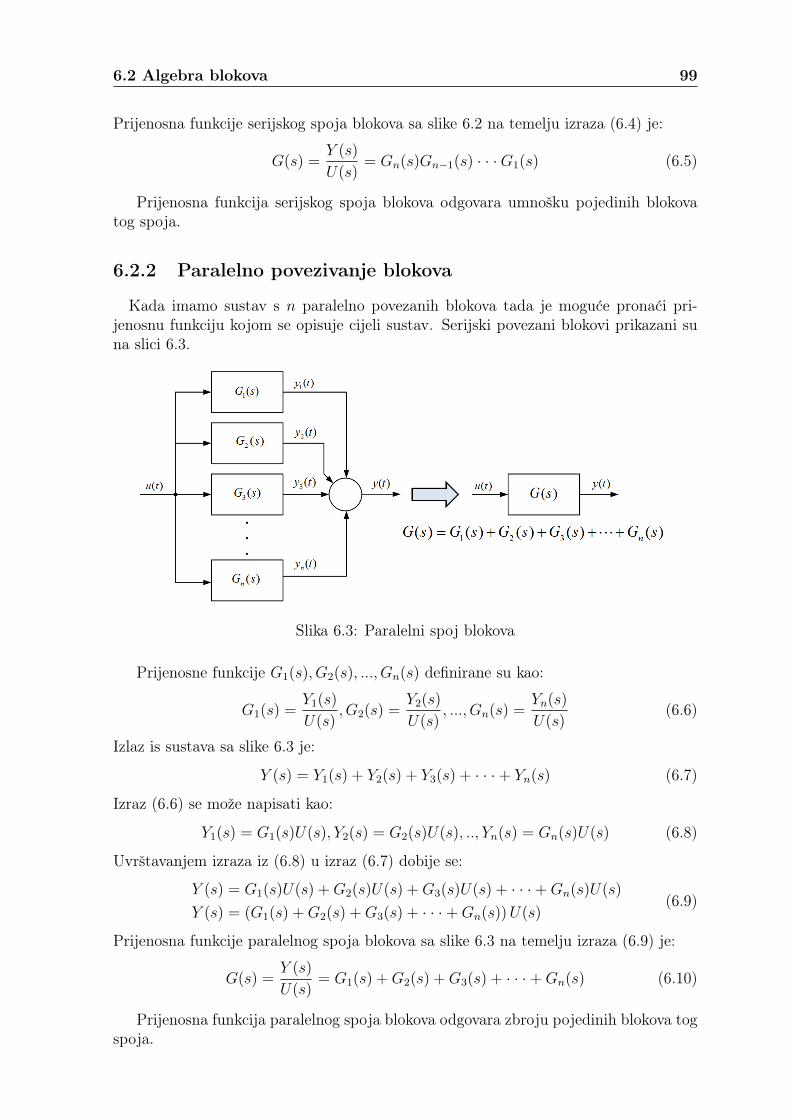
6.2 Algebra blokova 99
Prijenosna funkcije serijskog spoja blokova sa slike 6.2 na temelju izraza (6.4) je:
G(s) =Y (s)
U(s)= Gn(s)Gn−1(s) · · ·G1(s) (6.5)
Prijenosna funkcija serijskog spoja blokova odgovara umnošku pojedinih blokovatog spoja.
6.2.2 Paralelno povezivanje blokova
Kada imamo sustav s n paralelno povezanih blokova tada je moguće pronaći pri-jenosnu funkciju kojom se opisuje cijeli sustav. Serijski povezani blokovi prikazani suna slici 6.3.
Slika 6.3: Paralelni spoj blokova
Prijenosne funkcije G1(s), G2(s), ..., Gn(s) definirane su kao:
G1(s) =Y1(s)
U(s), G2(s) =
Y2(s)
U(s), ..., Gn(s) =
Yn(s)
U(s)(6.6)
Izlaz is sustava sa slike 6.3 je:
Y (s) = Y1(s) + Y2(s) + Y3(s) + · · ·+ Yn(s) (6.7)
Izraz (6.6) se može napisati kao:
Y1(s) = G1(s)U(s), Y2(s) = G2(s)U(s), .., Yn(s) = Gn(s)U(s) (6.8)
Uvrštavanjem izraza iz (6.8) u izraz (6.7) dobije se:
Y (s) = G1(s)U(s) +G2(s)U(s) +G3(s)U(s) + · · ·+Gn(s)U(s)
Y (s) = (G1(s) +G2(s) +G3(s) + · · ·+Gn(s))U(s)(6.9)
Prijenosna funkcije paralelnog spoja blokova sa slike 6.3 na temelju izraza (6.9) je:
G(s) =Y (s)
U(s)= G1(s) +G2(s) +G3(s) + · · ·+Gn(s) (6.10)
Prijenosna funkcija paralelnog spoja blokova odgovara zbroju pojedinih blokova togspoja.

100 Algebra blokova u sustavu automatskog upravljanja
6.2.3 Povratna veza
Povratna veza je neophodna u sustavima automatskog upravljanja. Povratni signalmože djelovati na ulazni signal negativno (s negativnim predznakom) ili pozitivno (spozitivnim predznakom). Prema tome ćemo razlikovati negativnu i pozitivnu povratnuvezu. Negativna povratna veza koristi se u sustavima automatske regulacije, a pozi-tivna povratna veza u oscilatorima. Povratna veza prikazana je na slici 6.4.
Slika 6.4: Povratna veza
Kao i u prethodna dva slučaja, i ovdje je moguće napraviti reprezentaciju povratneveze jednom prijenosnom funkcijom. Prijenosna funkcija sustava s povratnom vezomčesto će se koristiti prilikom ispitivanja stabilnosti sustava automatskog upravljanja 1.Sustav s povratnom vezom sa slike 6.4 u automatskom upravljanju naziva se i zatvorenikrug automatskog upravljanja. Sačinjen je od dva bloka:
• Go(s) - prijenosna funkcija otvorenog sustava automatskog upravljanja;
• Gpv(s) - prijenosna funkcija povratne veze (član povratne veze).
U slučaju da u otvorenom krugu postoji serijski spoj više prijenosnih funkcija, tadaGo(s) prema relaciji (6.5) je umnožak svih prijenosnih funkcija u otvorenom krugu(slika 6.5).
Slika 6.5: Otvoreni krug (serijski povezane prijenosne funkcije)
Izlazni signal povratne veze sa slike 6.4 moguće je zapisati kao:
Y (s) = Go(s)E(s) (6.11)
Signal pogreške slijeđenja E(s) dobije se kao razlika ulaznog signala U(s) i signalapovratne veze YPV (s):
E(s) = U(s)∓ YPV (s) (6.12)1Nešto više o stabilnosti u poglavlju o stabilnosti sustava upravljanja
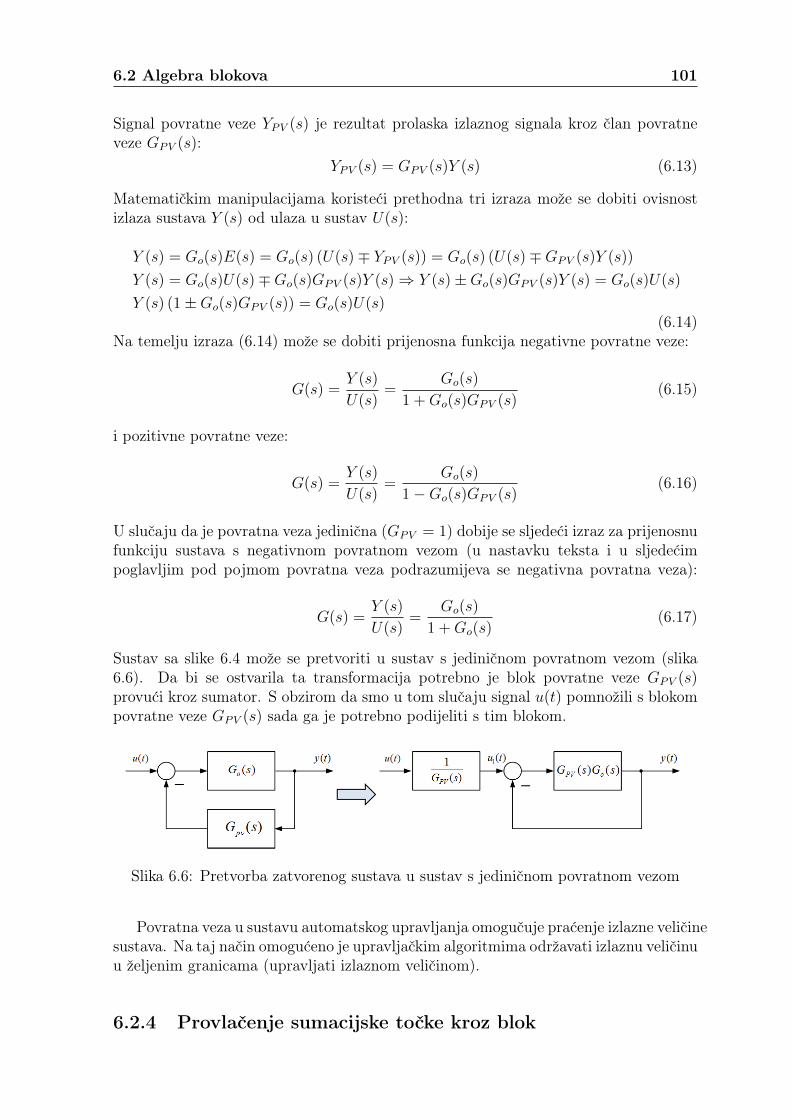
6.2 Algebra blokova 101
Signal povratne veze YPV (s) je rezultat prolaska izlaznog signala kroz član povratneveze GPV (s):
YPV (s) = GPV (s)Y (s) (6.13)
Matematičkim manipulacijama koristeći prethodna tri izraza može se dobiti ovisnostizlaza sustava Y (s) od ulaza u sustav U(s):
Y (s) = Go(s)E(s) = Go(s) (U(s)∓ YPV (s)) = Go(s) (U(s)∓GPV (s)Y (s))
Y (s) = Go(s)U(s)∓Go(s)GPV (s)Y (s)⇒ Y (s)±Go(s)GPV (s)Y (s) = Go(s)U(s)
Y (s) (1±Go(s)GPV (s)) = Go(s)U(s)(6.14)
Na temelju izraza (6.14) može se dobiti prijenosna funkcija negativne povratne veze:
G(s) =Y (s)
U(s)=
Go(s)
1 +Go(s)GPV (s)(6.15)
i pozitivne povratne veze:
G(s) =Y (s)
U(s)=
Go(s)
1−Go(s)GPV (s)(6.16)
U slučaju da je povratna veza jedinična (GPV = 1) dobije se sljedeći izraz za prijenosnufunkciju sustava s negativnom povratnom vezom (u nastavku teksta i u sljedećimpoglavljim pod pojmom povratna veza podrazumijeva se negativna povratna veza):
G(s) =Y (s)
U(s)=
Go(s)
1 +Go(s)(6.17)
Sustav sa slike 6.4 može se pretvoriti u sustav s jediničnom povratnom vezom (slika6.6). Da bi se ostvarila ta transformacija potrebno je blok povratne veze GPV (s)provući kroz sumator. S obzirom da smo u tom slučaju signal u(t) pomnožili s blokompovratne veze GPV (s) sada ga je potrebno podijeliti s tim blokom.
Slika 6.6: Pretvorba zatvorenog sustava u sustav s jediničnom povratnom vezom
Povratna veza u sustavu automatskog upravljanja omogučuje praćenje izlazne veličinesustava. Na taj način omogućeno je upravljačkim algoritmima održavati izlaznu veličinuu željenim granicama (upravljati izlaznom veličinom).
6.2.4 Provlačenje sumacijske točke kroz blok
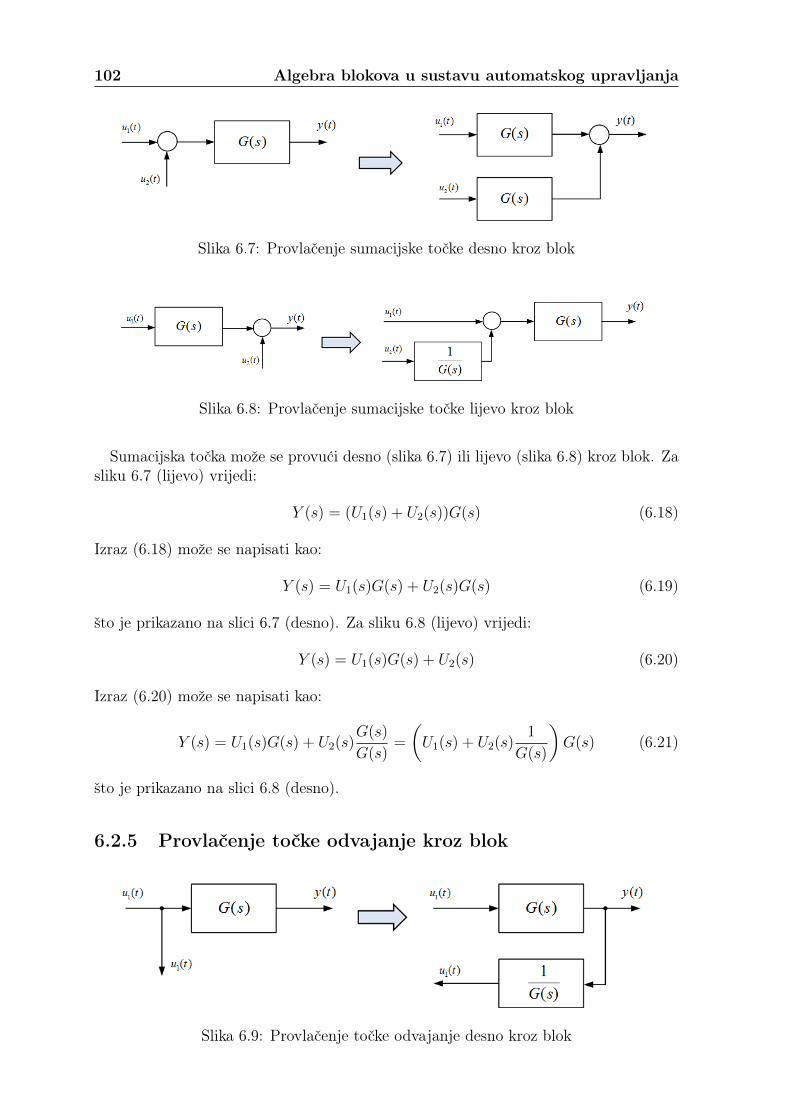
102 Algebra blokova u sustavu automatskog upravljanja
Slika 6.7: Provlačenje sumacijske točke desno kroz blok
Slika 6.8: Provlačenje sumacijske točke lijevo kroz blok
Sumacijska točka može se provući desno (slika 6.7) ili lijevo (slika 6.8) kroz blok. Zasliku 6.7 (lijevo) vrijedi:
Y (s) = (U1(s) + U2(s))G(s) (6.18)
Izraz (6.18) može se napisati kao:
Y (s) = U1(s)G(s) + U2(s)G(s) (6.19)
što je prikazano na slici 6.7 (desno). Za sliku 6.8 (lijevo) vrijedi:
Y (s) = U1(s)G(s) + U2(s) (6.20)
Izraz (6.20) može se napisati kao:
Y (s) = U1(s)G(s) + U2(s)G(s)
G(s)=
(U1(s) + U2(s)
1
G(s)
)G(s) (6.21)
što je prikazano na slici 6.8 (desno).
6.2.5 Provlačenje točke odvajanje kroz blok
Slika 6.9: Provlačenje točke odvajanje desno kroz blok
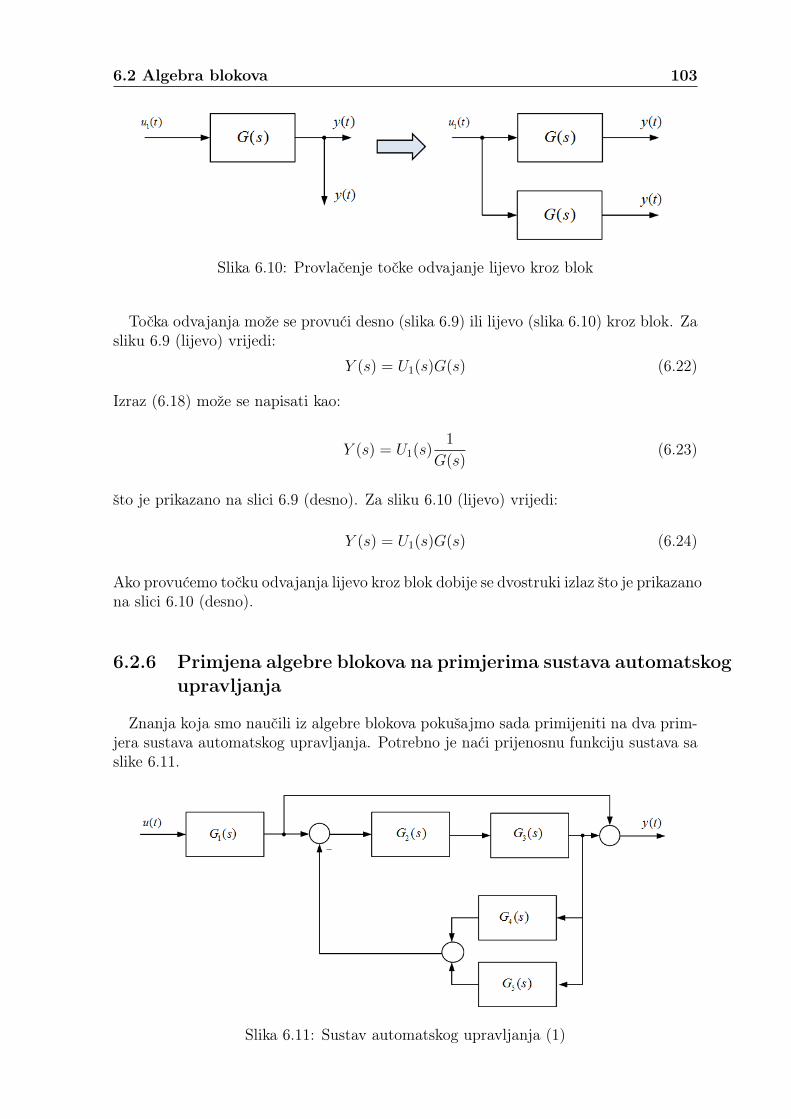
6.2 Algebra blokova 103
Slika 6.10: Provlačenje točke odvajanje lijevo kroz blok
Točka odvajanja može se provući desno (slika 6.9) ili lijevo (slika 6.10) kroz blok. Zasliku 6.9 (lijevo) vrijedi:
Y (s) = U1(s)G(s) (6.22)
Izraz (6.18) može se napisati kao:
Y (s) = U1(s)1
G(s)(6.23)
što je prikazano na slici 6.9 (desno). Za sliku 6.10 (lijevo) vrijedi:
Y (s) = U1(s)G(s) (6.24)
Ako provućemo točku odvajanja lijevo kroz blok dobije se dvostruki izlaz što je prikazanona slici 6.10 (desno).
6.2.6 Primjena algebre blokova na primjerima sustava automatskogupravljanja
Znanja koja smo naučili iz algebre blokova pokušajmo sada primijeniti na dva prim-jera sustava automatskog upravljanja. Potrebno je naći prijenosnu funkciju sustava saslike 6.11.
Slika 6.11: Sustav automatskog upravljanja (1)
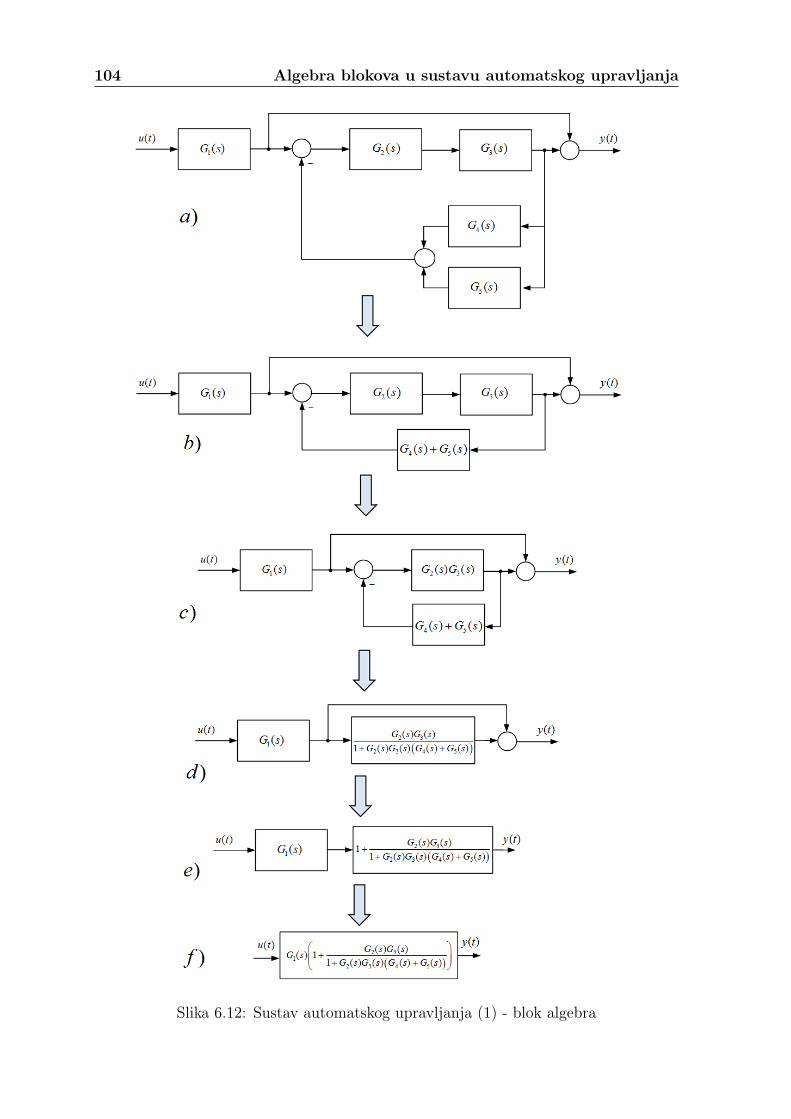
104 Algebra blokova u sustavu automatskog upravljanja
Slika 6.12: Sustav automatskog upravljanja (1) - blok algebra
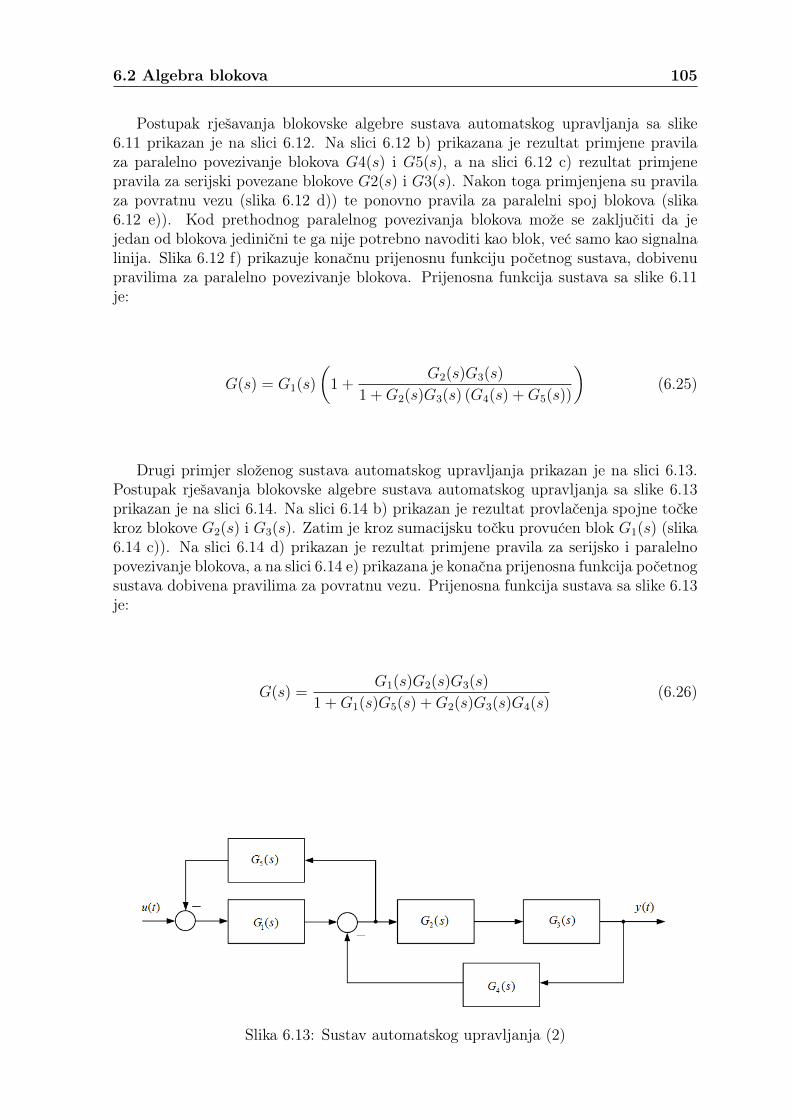
6.2 Algebra blokova 105
Postupak rješavanja blokovske algebre sustava automatskog upravljanja sa slike6.11 prikazan je na slici 6.12. Na slici 6.12 b) prikazana je rezultat primjene pravilaza paralelno povezivanje blokova G4(s) i G5(s), a na slici 6.12 c) rezultat primjenepravila za serijski povezane blokove G2(s) i G3(s). Nakon toga primjenjena su pravilaza povratnu vezu (slika 6.12 d)) te ponovno pravila za paralelni spoj blokova (slika6.12 e)). Kod prethodnog paralelnog povezivanja blokova može se zaključiti da jejedan od blokova jedinični te ga nije potrebno navoditi kao blok, već samo kao signalnalinija. Slika 6.12 f) prikazuje konačnu prijenosnu funkciju početnog sustava, dobivenupravilima za paralelno povezivanje blokova. Prijenosna funkcija sustava sa slike 6.11je:
G(s) = G1(s)
(1 +
G2(s)G3(s)
1 +G2(s)G3(s) (G4(s) +G5(s))
)(6.25)
Drugi primjer složenog sustava automatskog upravljanja prikazan je na slici 6.13.Postupak rješavanja blokovske algebre sustava automatskog upravljanja sa slike 6.13prikazan je na slici 6.14. Na slici 6.14 b) prikazan je rezultat provlačenja spojne točkekroz blokove G2(s) i G3(s). Zatim je kroz sumacijsku točku provućen blok G1(s) (slika6.14 c)). Na slici 6.14 d) prikazan je rezultat primjene pravila za serijsko i paralelnopovezivanje blokova, a na slici 6.14 e) prikazana je konačna prijenosna funkcija početnogsustava dobivena pravilima za povratnu vezu. Prijenosna funkcija sustava sa slike 6.13je:
G(s) =G1(s)G2(s)G3(s)
1 +G1(s)G5(s) +G2(s)G3(s)G4(s)(6.26)
Slika 6.13: Sustav automatskog upravljanja (2)
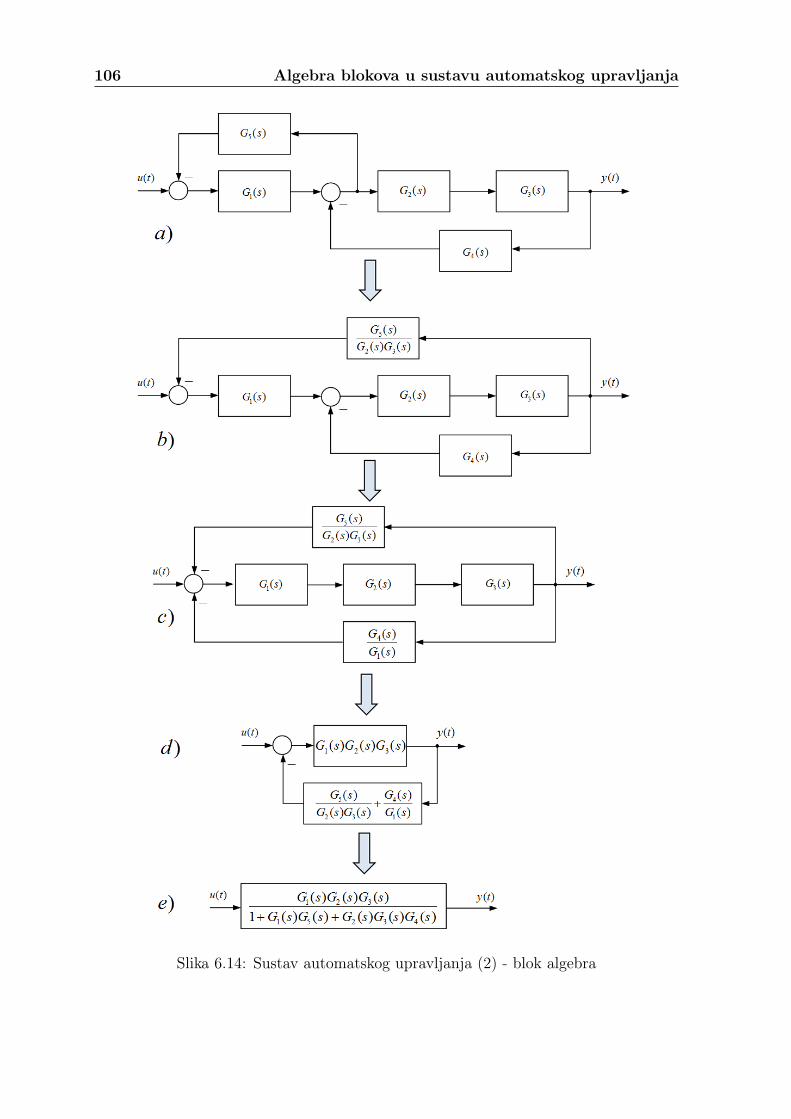
106 Algebra blokova u sustavu automatskog upravljanja
Slika 6.14: Sustav automatskog upravljanja (2) - blok algebra
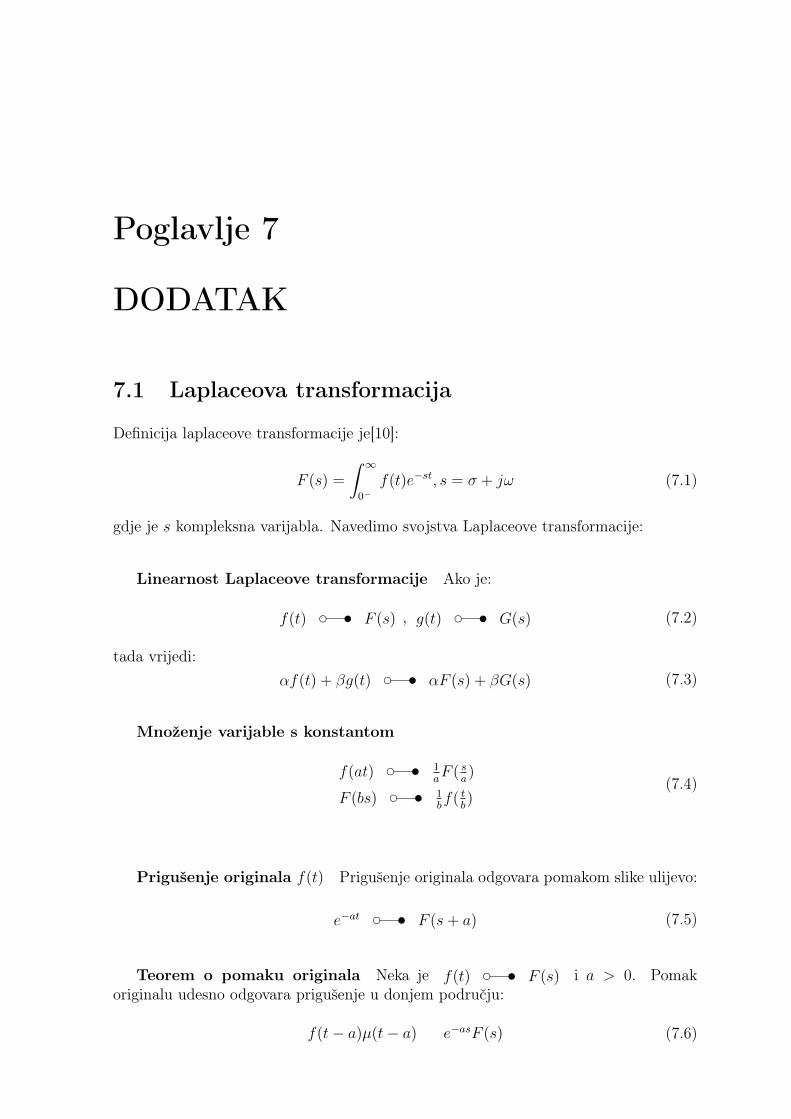
Poglavlje 7
DODATAK
7.1 Laplaceova transformacija
Definicija laplaceove transformacije je[10]:
F (s) =
∫ ∞0−
f(t)e−st, s = σ + jω (7.1)
gdje je s kompleksna varijabla. Navedimo svojstva Laplaceove transformacije:
Linearnost Laplaceove transformacije Ako je:
f(t) d t F (s) , g(t) d t G(s) (7.2)
tada vrijedi:αf(t) + βg(t) d t αF (s) + βG(s) (7.3)
Množenje varijable s konstantom
f(at) d t 1aF ( s
a)
F (bs) d t 1bf( t
b)
(7.4)
Prigušenje originala f(t) Prigušenje originala odgovara pomakom slike ulijevo:
e−at d t F (s+ a) (7.5)
Teorem o pomaku originala Neka je f(t) d t F (s) i a > 0. Pomakoriginalu udesno odgovara prigušenje u donjem području:
f(t− a)µ(t− a) e−asF (s) (7.6)

108 DODATAK
Deriviranje originala f(t) Za deriviranje originala f(t) vrijedi:
f ′(t) d t sF (s)− f(0)
f ′′(t) d t s2F (s)− sf(0)− f ′(0)
.
.
f (n)(t) d t snF (s)− sn−1f(0)− sn−2f ′(0)− ...− f (n−1)(0)
(7.7)
Deriviranje slike f(t) Deriviranje u frekvencijskoj domeni (s domeni) odgovaramnoženju s −t u vremenskoj domeni:
(−t)f(t) d t F ′(s). . .
(−t)nf(t) d t F (n)(s)
(7.8)
Integriranje originala ∫ t0f(t)dt d t F (s)
s(7.9)
Integriranje slikef(t)t
d t ∫∞0F (s)ds (7.10)
Slika periodične funkcije Slika periodične funkcije f(t) s periodom T računase:
F (s) =1
1− e−Ts
∫ T
0
e−stf(t)dt (7.11)
Teorem o konačnoj vrijednosti Konačna vrijednost ili stacionarno stanje (ustal-jena vrijednost) odziva može se dobiti sljedećim izrazom:
f(∞) = lims→∞
sF (s) (7.12)
Teorem o početnoj vrijednosti
limt→0
f(t) = lims→∞
sF (s) (7.13)
Teorem o konvoluciji Konvolucija dvaju originala odgovara umnošku slika:
y(t) = g(t) ∗ u(t) =∫ t0g(τ)u(t− τ)dτ d t Y (s) = G(s)U(s) (7.14)

7.1 Laplaceova transformacija 109
7.1.1 Tablica Laplaceove transformacije
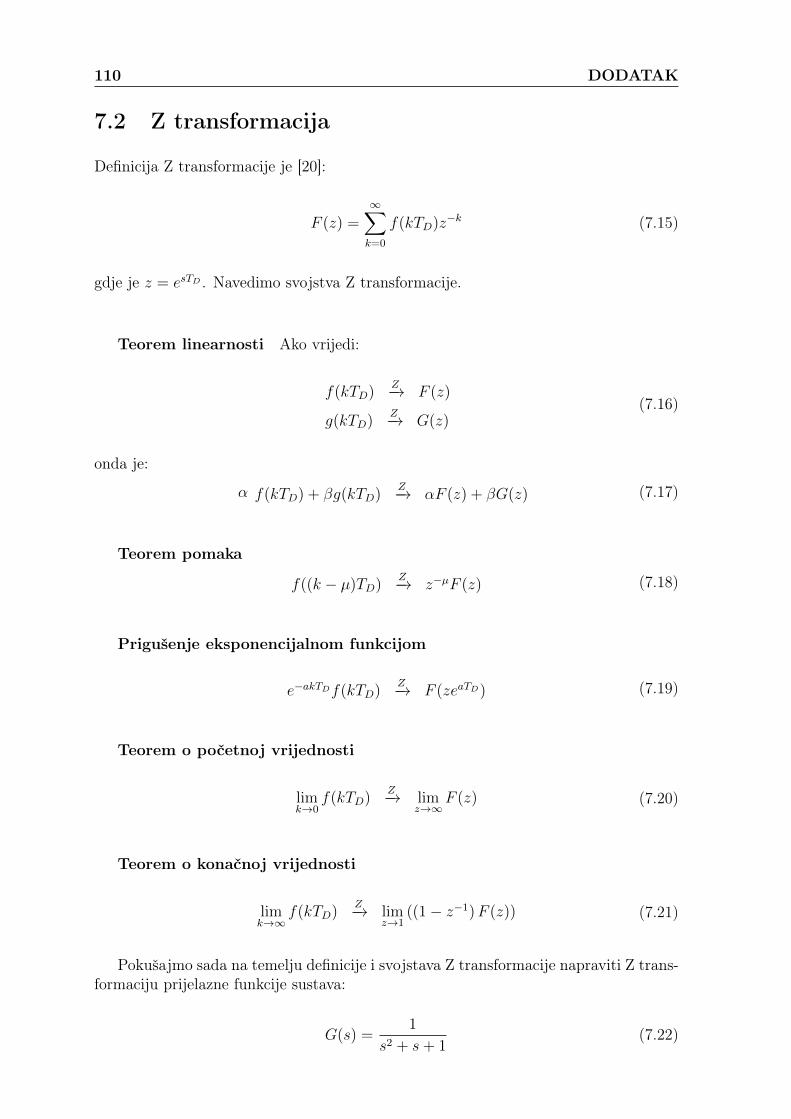
110 DODATAK
7.2 Z transformacija
Definicija Z transformacije je [20]:
F (z) =∞∑k=0
f(kTD)z−k (7.15)
gdje je z = esTD . Navedimo svojstva Z transformacije.
Teorem linearnosti Ako vrijedi:
f(kTD)Z−→ F (z)
g(kTD)Z−→ G(z)
(7.16)
onda je:
α f(kTD) + βg(kTD)Z−→ αF (z) + βG(z) (7.17)
Teorem pomaka
f((k − µ)TD)Z−→ z−µF (z) (7.18)
Prigušenje eksponencijalnom funkcijom
e−akTDf(kTD)Z−→ F (zeaTD) (7.19)
Teorem o početnoj vrijednosti
limk→0
f(kTD)Z−→ lim
z→∞F (z) (7.20)
Teorem o konačnoj vrijednosti
limk→∞
f(kTD)Z−→ lim
z→1((1− z−1)F (z)) (7.21)
Pokušajmo sada na temelju definicije i svojstava Z transformacije napraviti Z trans-formaciju prijelazne funkcije sustava:
G(s) =1
s2 + s+ 1(7.22)

7.2 Z transformacija 111
Rastavom na parcijalne razlomke dobije se:
UIZ(s) = G(s)UUL(s) =1
s2 + s+ 1
1
s=
1
s2 + s+ 14
+ 34
1
s
UIZ(s) =1(
s+ 12
)2+ 3
4
1
s=
A+Bs(s+ 1
2
)2+ 3
4
+C
s
As+Bs2 + C(s2 + s+ 1
)= 1
C = 1
A+ C = 0⇒ A = −1
B + C = 0⇒ B = −1
UIZ(s) =1
s− 1 + s(
s+ 12
)2+ 3
4
=1
s−
12
+(s+ 1
2
)(s+ 1
2
)2+ 3
4
UIZ(s) =1
s−
s+ 12(
s+ 12
)2+ 3
4
−12
√32
2√3(
s+ 12
)2+ 3
4
uiz(t) = 1− e−12t
(cos
√3
2t+
√3
3sin
√3
2t
)
(7.23)
Primjenom Z transformacije po definiciji dobije se:
uiz(t) = 1− e−12t
(cos
√3
2t+
√3
3sin
√3
2t
)
UIZ(z) =∞∑k=0
uiz(kTD)z−k =∞∑k=0
(1− e−
12kTD
(cos(
√3
2kTD) +
√3
3sin(
√3
2kTD)
))z−k
UIZ(z) =∞∑k=0
z−k −∞∑k=0
(e−
12kTD cos(
√3
2kTD)
)z−k −
√3
3
∞∑k=0
(e−
12kTD sin(
√3
2kTD)
)z−k
cosϕ =ejϕ + e−jϕ
2, sinϕ =
ejϕ − e−jϕ
j2
UIZ(z) =∞∑k=0
z−k −∞∑k=0
e−12kTD
ej√
32kTD + e−j
√32kTD
2z−k
−√
3
3
∞∑k=0
e−12kTD
ej√
32kTD − e−j
√3
2kTD
j2z−k
UIZ(z) =∞∑k=0
z−k − 1
2
∞∑k=0
e(− 12TD+j
√3
2TD
)z
k
− 1
2
∞∑k=0
e(− 12TD−j
√32TD
)z
k
−√
3
j6
∞∑k=0
e(− 12TD+j
√3
2TD
)z
k
+
√3
j6
∞∑k=0
e(− 12TD−j
√3
2TD
)z
k
(7.24)

112 DODATAK
UIZ(z) =1
1− z−1− 1
2
1
1− e
(− 1
2TD+j
√3
2 TD
)z
+1
1− e
(− 1
2TD−j√3
2 TD
)z
−√
3
j6
1
1− e
(− 1
2TD+j
√3
2 TD
)z
− 1
1− e
(− 1
2TD−j√32 TD
)z
UIZ(z) =
z
z − 1− 1
2
(z
z − e(− 1
2TD+j
√3
2TD
) +z
z − e(− 1
2TD−j
√32TD
))
−√
3
j6
(z
z − e(− 1
2TD+j
√3
2TD
) − z
z − e(− 1
2TD−j
√3
2TD
))
UIZ(z) =z
z − 1− 1
2
(z
z − e− 12TDej
√3
2TD
+z
z − e− 12TDe−j
√32TD
)−√
3
j6
(z
z − e− 12TDej
√32TD− z
z − e− 12TDe−j
√3
2TD
)UIZ(z) =
z
z − 1
−1
2
z
z − e− 12TD
(cos
√32TD + j sin
√32TD
) +z
z − e− 12TD
(cos
√32TD − j sin
√32TD
)
−√
3
j6
z
z − e− 12TD
(cos
√32TD + j sin
√32TD
) − z
z − e− 12TD
(cos
√32TD − j sin
√32TD
)
UIZ(z) =z
z − 1
−1
2
z(z − e− 1
2TD
(cos
√32TD − j sin
√32TD
)+ z − e− 1
2TD
(cos
√32TD + j sin
√32TD
))(z − e− 1
2TD
(cos
√32TD + j sin
√32TD
))(z − e− 1
2TD
(cos
√32TD − j sin
√32TD
))
−√
3
j6
z(z − e− 1
2TD
(cos
√32TD − j sin
√32TD
)− z + e−
12TD
(cos
√32TD + j sin
√32TD
))(z − e− 1
2TD
(cos
√32TD + j sin
√32TD
))(z − e− 1
2TD
(cos
√32TD − j sin
√32TD
))
UIZ(z) =z
z − 1− 1
2
z(
2z − 2e−12TD cos
√32TD
)(z2 − 2ze−
12TD cos
√32TD − e−
22TD
)
−√
3
j6
z(
2e−12TDj sin
√32TD
)(z2 − 2ze−
12TD cos
√32TD − e−
22TD
)
UIZ(z) =z
z − 1−
z2 − 2ze−12TD cos
√32TD
z2 − 2ze−12TD cos
√32TD − e−
22TD
−√
3
2
(ze−
12TD sin
√32TD
z2 − 2ze−12TD cos
√32TD − e−
22TD
)(7.25)
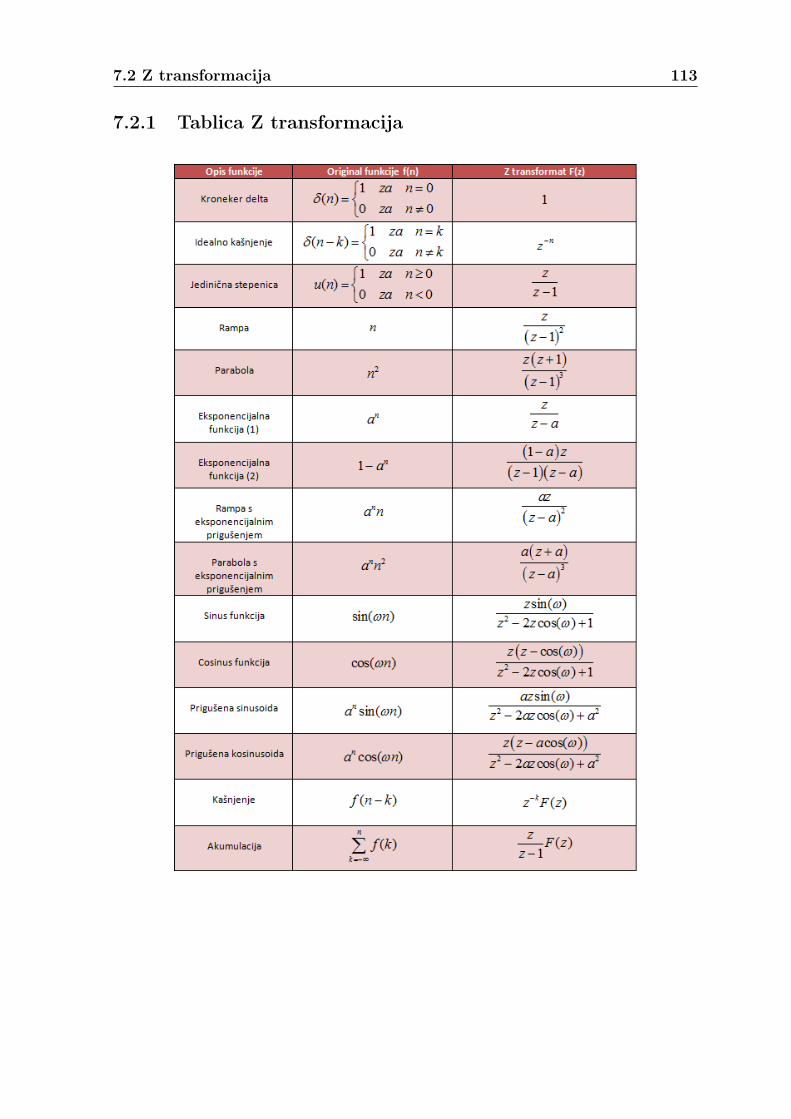
7.2 Z transformacija 113
7.2.1 Tablica Z transformacija

114 DODATAK
7.2.2 Tablica Laplaceove i Z transformacija (parovi)
Napomena: Z transformacije računaju se za t = kTD, gdje je TD vrijeme diskretizacije.
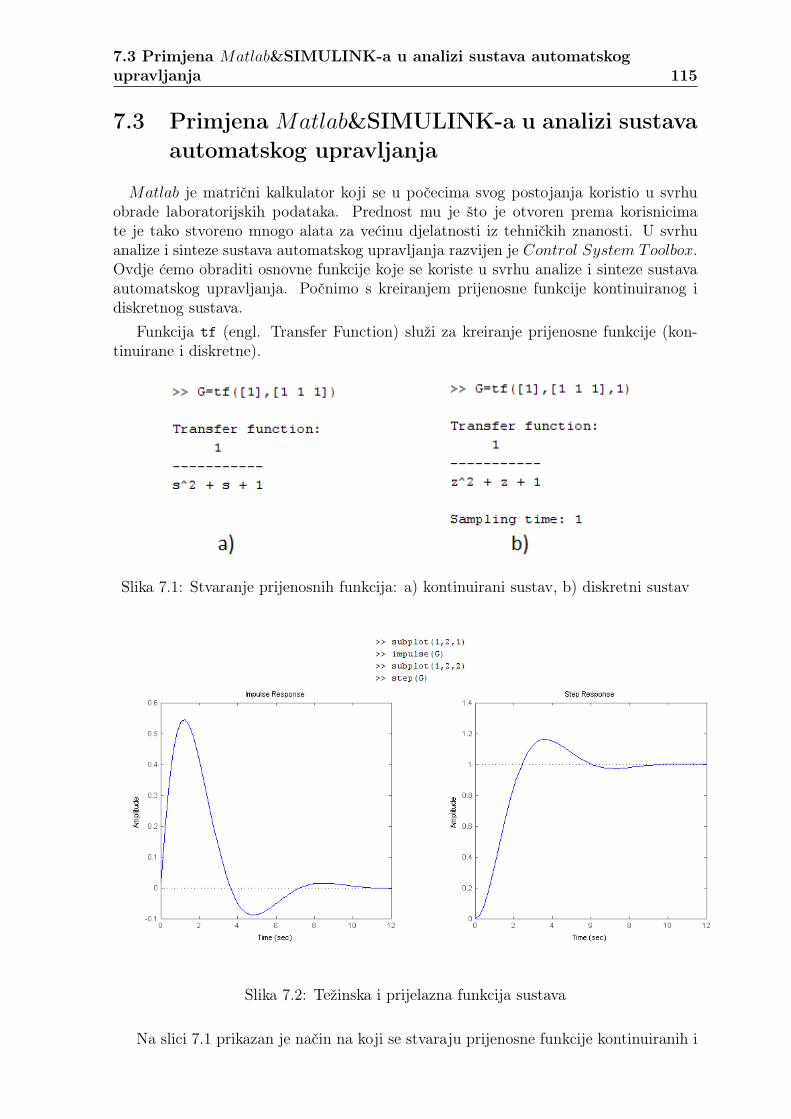
7.3 Primjena Matlab&SIMULINK-a u analizi sustava automatskogupravljanja 115
7.3 Primjena Matlab&SIMULINK-a u analizi sustavaautomatskog upravljanja
Matlab je matrični kalkulator koji se u počecima svog postojanja koristio u svrhuobrade laboratorijskih podataka. Prednost mu je što je otvoren prema korisnicimate je tako stvoreno mnogo alata za većinu djelatnosti iz tehničkih znanosti. U svrhuanalize i sinteze sustava automatskog upravljanja razvijen je Control System Toolbox.Ovdje ćemo obraditi osnovne funkcije koje se koriste u svrhu analize i sinteze sustavaautomatskog upravljanja. Počnimo s kreiranjem prijenosne funkcije kontinuiranog idiskretnog sustava.
Funkcija tf (engl. Transfer Function) služi za kreiranje prijenosne funkcije (kon-tinuirane i diskretne).
Slika 7.1: Stvaranje prijenosnih funkcija: a) kontinuirani sustav, b) diskretni sustav
Slika 7.2: Težinska i prijelazna funkcija sustava
Na slici 7.1 prikazan je način na koji se stvaraju prijenosne funkcije kontinuiranih i
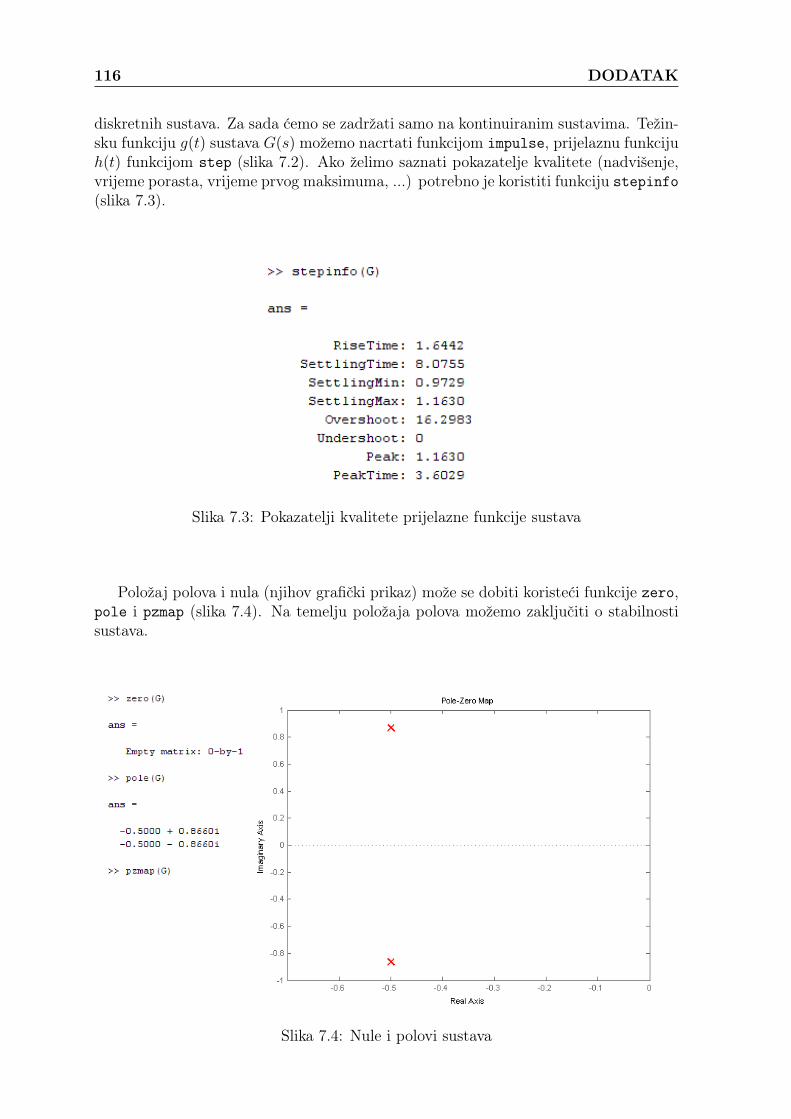
116 DODATAK
diskretnih sustava. Za sada ćemo se zadržati samo na kontinuiranim sustavima. Težin-sku funkciju g(t) sustava G(s) možemo nacrtati funkcijom impulse, prijelaznu funkcijuh(t) funkcijom step (slika 7.2). Ako želimo saznati pokazatelje kvalitete (nadvišenje,vrijeme porasta, vrijeme prvog maksimuma, ...) potrebno je koristiti funkciju stepinfo(slika 7.3).
Slika 7.3: Pokazatelji kvalitete prijelazne funkcije sustava
Položaj polova i nula (njihov grafički prikaz) može se dobiti koristeći funkcije zero,pole i pzmap (slika 7.4). Na temelju položaja polova možemo zaključiti o stabilnostisustava.
Slika 7.4: Nule i polovi sustava
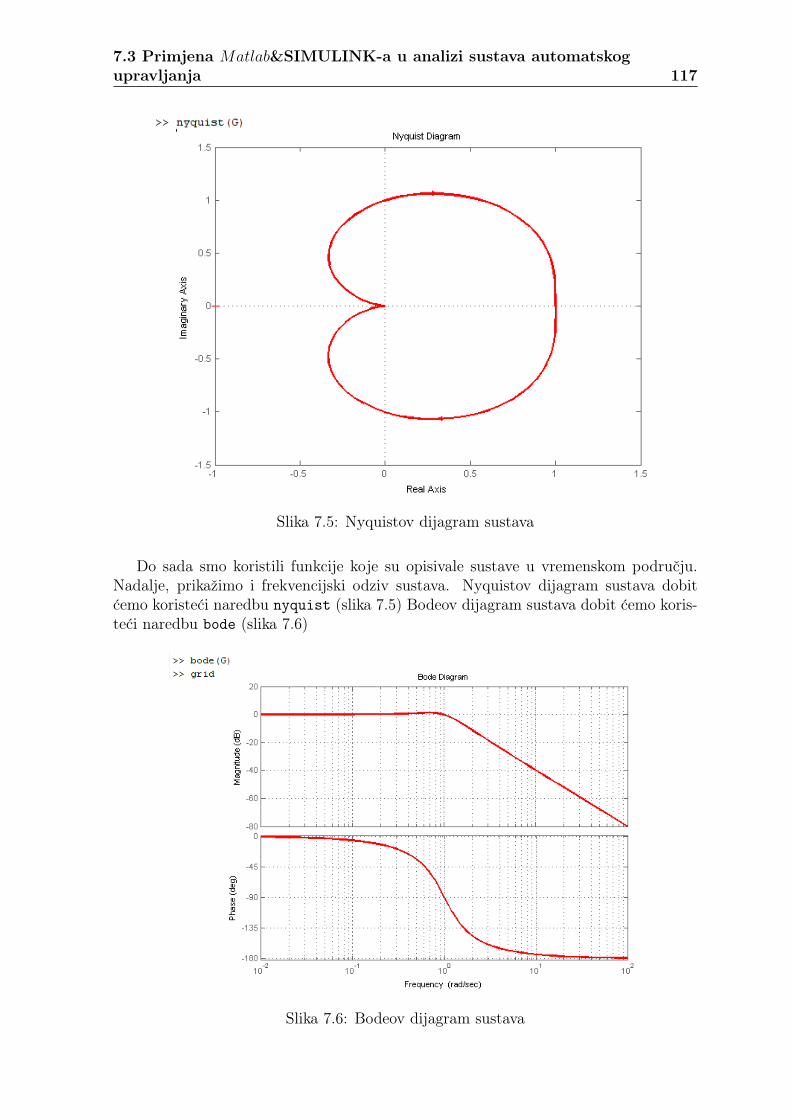
7.3 Primjena Matlab&SIMULINK-a u analizi sustava automatskogupravljanja 117
Slika 7.5: Nyquistov dijagram sustava
Do sada smo koristili funkcije koje su opisivale sustave u vremenskom području.Nadalje, prikažimo i frekvencijski odziv sustava. Nyquistov dijagram sustava dobitćemo koristeći naredbu nyquist (slika 7.5) Bodeov dijagram sustava dobit ćemo koris-teći naredbu bode (slika 7.6)
Slika 7.6: Bodeov dijagram sustava
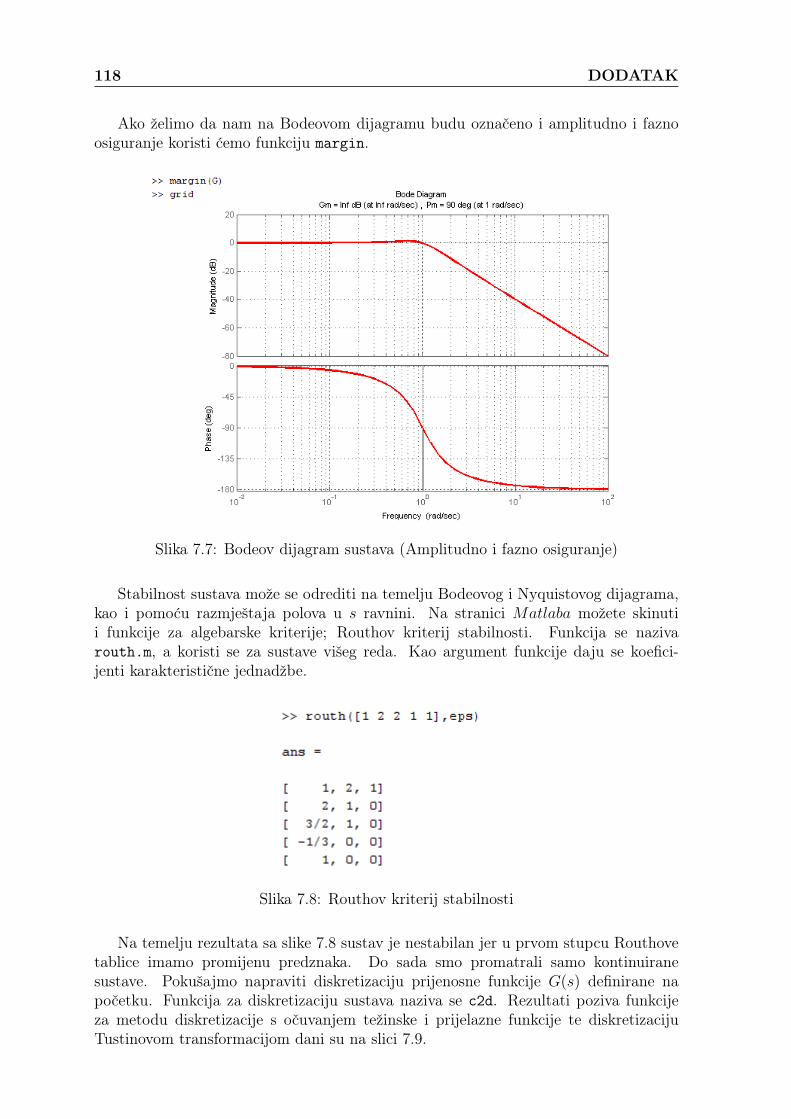
118 DODATAK
Ako želimo da nam na Bodeovom dijagramu budu označeno i amplitudno i faznoosiguranje koristi ćemo funkciju margin.
Slika 7.7: Bodeov dijagram sustava (Amplitudno i fazno osiguranje)
Stabilnost sustava može se odrediti na temelju Bodeovog i Nyquistovog dijagrama,kao i pomoću razmještaja polova u s ravnini. Na stranici Matlaba možete skinutii funkcije za algebarske kriterije; Routhov kriterij stabilnosti. Funkcija se nazivarouth.m, a koristi se za sustave višeg reda. Kao argument funkcije daju se koefici-jenti karakteristične jednadžbe.
Slika 7.8: Routhov kriterij stabilnosti
Na temelju rezultata sa slike 7.8 sustav je nestabilan jer u prvom stupcu Routhovetablice imamo promijenu predznaka. Do sada smo promatrali samo kontinuiranesustave. Pokušajmo napraviti diskretizaciju prijenosne funkcije G(s) definirane napočetku. Funkcija za diskretizaciju sustava naziva se c2d. Rezultati poziva funkcijeza metodu diskretizacije s očuvanjem težinske i prijelazne funkcije te diskretizacijuTustinovom transformacijom dani su na slici 7.9.
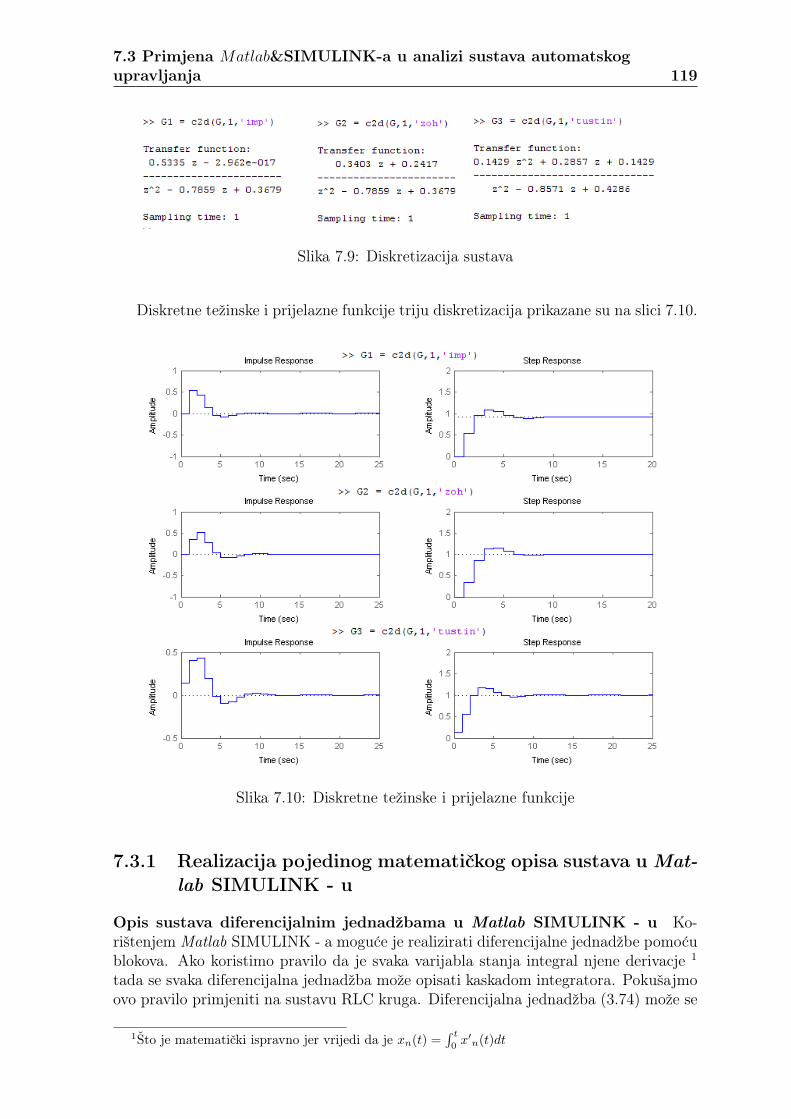
7.3 Primjena Matlab&SIMULINK-a u analizi sustava automatskogupravljanja 119
Slika 7.9: Diskretizacija sustava
Diskretne težinske i prijelazne funkcije triju diskretizacija prikazane su na slici 7.10.
Slika 7.10: Diskretne težinske i prijelazne funkcije
7.3.1 Realizacija pojedinog matematičkog opisa sustava u Mat-lab SIMULINK - u
Opis sustava diferencijalnim jednadžbama u Matlab SIMULINK - u Ko-rištenjem Matlab SIMULINK - a moguće je realizirati diferencijalne jednadžbe pomoćublokova. Ako koristimo pravilo da je svaka varijabla stanja integral njene derivacje 1
tada se svaka diferencijalna jednadžba može opisati kaskadom integratora. Pokušajmoovo pravilo primjeniti na sustavu RLC kruga. Diferencijalna jednadžba (3.74) može se
1Što je matematički ispravno jer vrijedi da je xn(t) =∫ t
0x′
n(t)dt
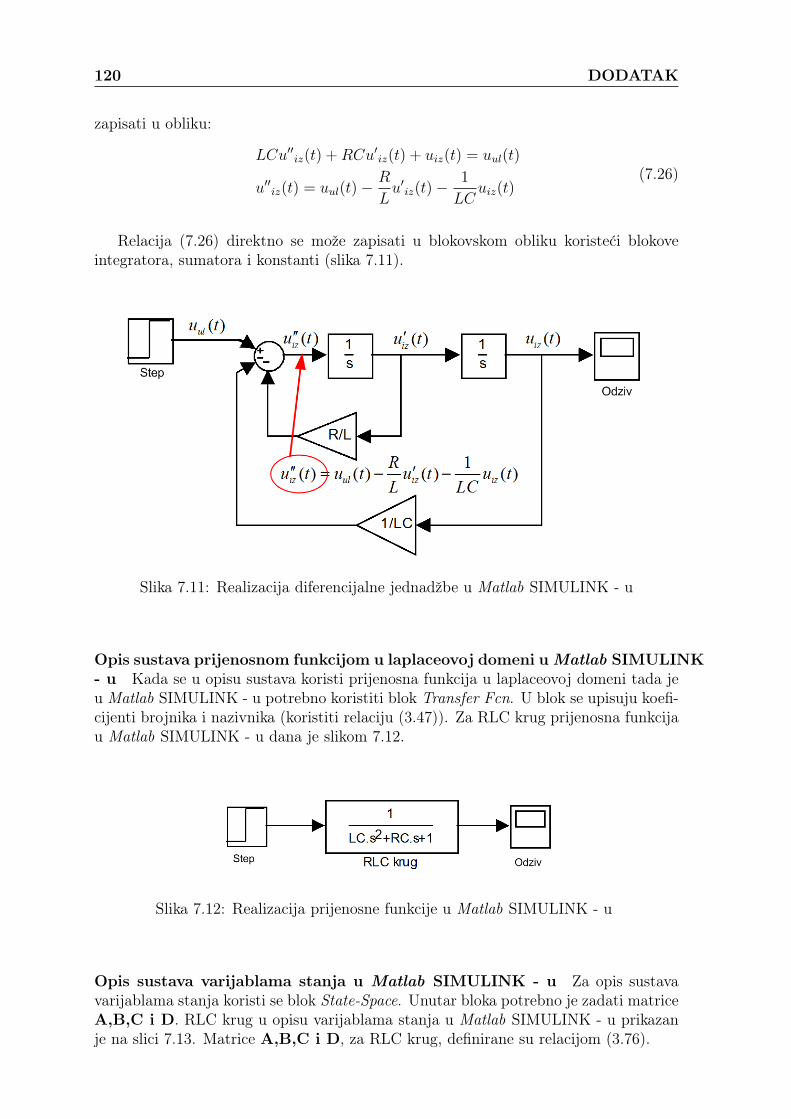
120 DODATAK
zapisati u obliku:
LCu′′iz(t) +RCu′iz(t) + uiz(t) = uul(t)
u′′iz(t) = uul(t)−R
Lu′iz(t)−
1
LCuiz(t)
(7.26)
Relacija (7.26) direktno se može zapisati u blokovskom obliku koristeći blokoveintegratora, sumatora i konstanti (slika 7.11).
Slika 7.11: Realizacija diferencijalne jednadžbe u Matlab SIMULINK - u
Opis sustava prijenosnom funkcijom u laplaceovoj domeni u Matlab SIMULINK- u Kada se u opisu sustava koristi prijenosna funkcija u laplaceovoj domeni tada jeu Matlab SIMULINK - u potrebno koristiti blok Transfer Fcn. U blok se upisuju koefi-cijenti brojnika i nazivnika (koristiti relaciju (3.47)). Za RLC krug prijenosna funkcijau Matlab SIMULINK - u dana je slikom 7.12.
Slika 7.12: Realizacija prijenosne funkcije u Matlab SIMULINK - u
Opis sustava varijablama stanja u Matlab SIMULINK - u Za opis sustavavarijablama stanja koristi se blok State-Space. Unutar bloka potrebno je zadati matriceA,B,C i D. RLC krug u opisu varijablama stanja u Matlab SIMULINK - u prikazanje na slici 7.13. Matrice A,B,C i D, za RLC krug, definirane su relacijom (3.76).
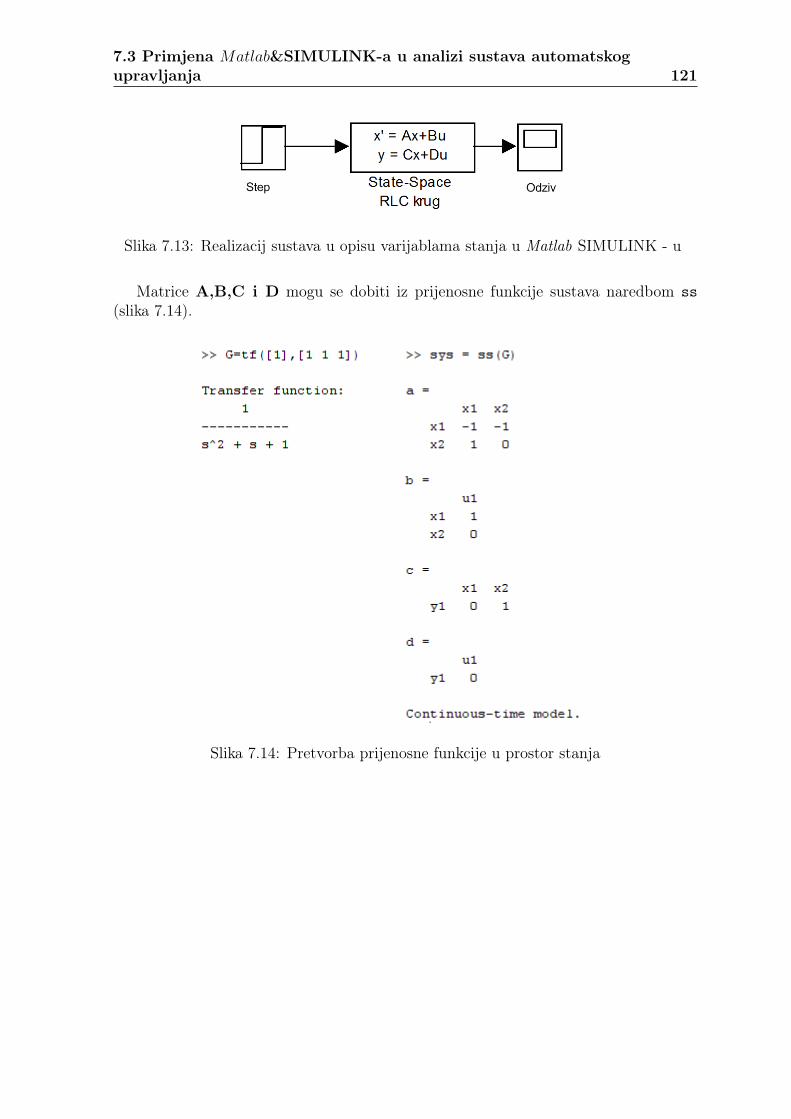
7.3 Primjena Matlab&SIMULINK-a u analizi sustava automatskogupravljanja 121
Slika 7.13: Realizacij sustava u opisu varijablama stanja u Matlab SIMULINK - u
Matrice A,B,C i D mogu se dobiti iz prijenosne funkcije sustava naredbom ss(slika 7.14).
Slika 7.14: Pretvorba prijenosne funkcije u prostor stanja

122 DODATAK
Bibliografija
[1] Z. Vukić and L. Kuljača, Automatsko upravljanje - analiza linearnih sustava. KI-GEN, Zagreb, 2005.
[2] www.caradvice.com.au/28162/expert-believes-australian-car-industry-wont-survive/.
[3] www.tuzla-x.ba/Vijesti/novi-brend-pivare-tuzla-erster.html.
[4] jastrebarsko.uhrvatskoj.com/pavusin.
[5] hr.wikipedia.org/wiki/Neuron.
[6] www.poslovni-software.com/proizvod/gosoft-2000-integralni-poslovni-informacijski-sustav/40/32/.
[7] T. Šurina, Automatska regulacija. Školska knjiga, Zagreb, 1991.
[8] H. Babić, SIGNALI I SUSTAVI. FER - Zavod za elektroničke sustave i obradbuinformacija, Zagreb, 1996.
[9] M. Pašić, Matematička analiza 2. FER - Zavod za primjenjenu matematiku, Za-greb, 2002.
[10] N. Elezović, MATEMATIKA 3 - Fourierov red i integral, Laplaceova transforma-cija. ELEMENT, Zagreb, 2006.
[11] D. Stipaničev and J. Marasović, Digitalno vođenje. Fakultet elektrotehnike, stro-jarstva i brodogradnje, Split, 2008.
[12] N. Perić, Automatsko upravljanje. FER - Zavod za automatiku i računalno inžen-jerstvo, Zagreb, 2009.
[13] N. Elezović, Funkcija kompleksne varijable. ELEMENT, Zagreb, 2008.
[14] T. Petković, Fourierova transformacija i spektri - predavanja. FER - Zavod zaelektroničke sustave i obradbu informacija, Zagreb, 2005.
[15] E. Cheever, Linear Physical Systems Analysis - Bode Plots.http://www.swarthmore.edu/NatSci/echeeve1/Ref/LPSA/Bode/Bode.html:Department of Engineering, Swarthmore College.
[16] J. J. DiStefano, A. R. Stubberud, and I. J. Williams, Theory and Problems ofFeedback and Control System. Schaum’s Outline, 1995.
124 BIBLIOGRAFIJA
[17] E. J. Routh, Treatise on the Stability of a Given State of Motion. MacMillan,London, 1877.
[18] K. Warwick, An Introduction to Control Systems. World Scientific, Singapore,1996.
[19] D. Matika, Sustavi digitalnog upravljanja. Graphis, Zagreb, 2005.
[20] A. V. Oppenheim, R. w. Schafer, and J. R. Buck, Discrete - Time Signal Process-ing. Prentice Hall, New Jersey, 1998.
Indeks
Član s transportnim kašnjenjem, 62
Proporcionalni član drugog reda, 51Proporcionalni član drugog reda s prigušenim
oscilatornim ponašanjem, 53Proporcionalni član nultog reda, 47Proporcionalni član prvog reda, 49
Algebra blokovaparalelno povezivanje blokova, 99povratna veza, 100provlačenje sumacijske točke kroz blok,
101provlačenje točke odvajanje kroz blok,
102Amplitudno frekvencijska karakteristika, 67Amplitudno osiguranje, 117
Biološki sustav, 7Blok dijagrami
blok, 97signalne linije, 97sumacijske točke, 97točke odvajanja, 97
Bodeov dijagram, 67, 72Bodeov dijagrami
član s transportnim kašnjajnem, 95I član, 94P0 član, 79PT1 član, 81PT2 član, 83PT2S član, 87D član, 92DT1 član, 92
Derivacijski član, 58Deterministički sustavi, 14Diferencijalne jednadžbe
Obične, 23Parcijalne, 23
Dinamički članoviČlan s transportnim kašnjenjem, 45
Proporcionalni član drugog reda, 45Proporcionalni član nultog reda, 45Proporcionalni član prvog reda, 45Derivacijski član, 45Integralni član, 45Proporcionalni član drugog reda s prigušenim
oscilatornim ponašanjem, 45Dinamički sustav, 5Diskretni sustavi, 13
Eksponencijalna funkcija, 32Eulerova formula, 32
Faktor prigušenja, 53Fazno frekvencijska karakteristika, 67Fazno osiguranje, 117Fourierova transformacija, 67Frekvencija prigušenih oscilacija, 54
Heavisideov razvoj, 35, 65Homogeno rješenje diferencijalne jednadžbe,
24
Impulsni odziv sustava, 26Informacijski sustav, 7Integralni član, 61Integriranje originala, 108Integriranje slike, 108Inverzna laplaceova transformacija, 34Istosmjerni motor, 50
Kauzalni sustavi, 19Koeficijent pojačanja sustava, 54Kontinuirani sustavi, 13Konvolucijski integral, 26
Laplaceova transformacija, 31, 37, 107Teorem o pomaku originala, 63
Linearni sustavi, 9
Nedeterministički sustavi, 15Nekauzalni sustavi, 20Nelinearni sustavi, 11
126 INDEKS
Neprigušene oscilacije, 54Nule sustava, 34, 116Nyquistov dijagram, 70Nyquistov dijagrami
član s transportnim kašnjajnem, 95D član, 91DT1 član, 91I član, 93P0 član, 79PT1 član, 80PT2 član, 82PT2S član, 85
Partikularno rješenje diferencijalne jednadžbe,25
Pokazatelji kvalitete, 56Nadvišenje, 56Vrijeme porasta, 56Vrijeme prvog maksimuma, 56Vrijeme ustaljivanja, 56
Pokazatelji kvalitete sustava, 116Polovi sustava, 34, 116
Dvostruki, 35Kompleksni, 35Višestruki, 35
Prigušene oscilacije, 54Prijelazna funkcija, 115Prijenosna funkcija, 115Prirodna frekvencija sustava, 54
Racionalna funkcija, 35RC filtar, 50Realni derivacijski član, 59Regulacijsko odstupanje, 33RLC krug, 55Rotacijski sustav, 50, 55
Slika periodične funkcije, 108Spremnik energije, 41Stohastički sustavi, 15Sustav, 5
Deterministički sustavi, 8Diskretni sustavi, 8Kauzalni sustavi, 9Kontinuirani sustavi, 8Linearni sustav, 8MIMO sustavi, 9Nedeterministički sustavi, 8Nekauzalni sustavi, 9
Nelinearni sustav, 8SISO sustavi, 9Stohastički sustavi, 8Sustavi bez memorije, 9Sustavi s koncentriranim parametrima,
9Sustavi s memorijom, 9Sustavi s raspodijeljenim parametrima,
9Vremenski promjenjivi sustavi, 8Vremenskine promjenjivi sustavi, 8
Sustavi bez memorijom, 19Sustavi s jednim ulazom i jednim izlazom
(SISO), 17Sustavi s koncentriranim parametrima, 16Sustavi s memorijom, 18Sustavi s raspodjeljenim parametrima, 16Sustavi s više ulaza i više izlaza (MIMO),
17Svojstva laplaceove transformacije, 32
Deriviranje originala, 33, 108Deriviranje slike, 108Integriranje originala, 33, 108Integriranje slike, 108Linearnost Laplaceove transformacije,
107Množenje varijable s konstantom, 107Prigušenje originala, 32, 107Teorem o konačnoj vrijednosti, 33, 108Teorem o konvoluciji, 33, 108Teorem o početnoj vrijednosti, 108Teorem o pomaku originala, 107
Tahogenerator, 50Težinska funkcija, 26, 115Tehnički sustav, 5Teorem o konačnoj vrijednosti, 33, 108Teorem o konvoluciji, 33, 108Teorem o početnoj vrijednosti, 108Teorem o pomaku originala, 63
Varijable stanja, 41Vremenski nepromjenjivi sustavi, 12Vremenski promjenjivi sustavi, 12
Z transformacijaPrigušenje eksponencijalnom funkcijom,
110Teorem linearnosti, 110
INDEKS 127
Teorem o konačnoj vrijednosti, 110Teorem o početnoj vrijednosti, 110Teorem pomaka, 110