-
Automatsko upravljanje 2014/2015
Prof.dr.sc. Nedjeljko Peric, Prof.dr.sc. Zoran VukicProf.dr.sc.
Mato Baotic, Doc.dr.sc. Nikola Mikovic
Zavod za automatiku i racunalno inenjerstvoFakultet
elektrotehnike i racunarstva
Predavanje 20 - Parametriranje PID regulatora
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 1 / 22
-
Uvod
Saetak Predavanja 19
PID regulator i iz njega izvedeni regulatori (PI, PD, P, I)
nairoko seprimjenjuju u automatizaciji proizvodnih i radnih
procesa(energetika, industrija, transport. . . )
Diskretizacijom prijenosne funkcije PID regulatora u
kontinuiranomvremenu dobije se rekurzivna jednadba algoritma PID
regulatora
Rekurzivna jednadba programski se realizira u
programirljivomured
_aju (mikroprocesorskom ured
_aju, programirljivom logickom
kontroleru-PLC, procesnom racunalu)
Stvorene su podloge za proirivanje znanja o specificnim
svojstvimaPID regulatora, ogranicenjima koja ima PID regulator te
potrebiukljucivanja dodatnih funkcija osnovnom algoritmu PID
regulatora
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 2 / 22
-
Uvod
Cilj
Razumjeti postupak parametriranja regulatora pomocu
integralnihkriterija
Razumjeti Ziegler-Nicholsov postupak parametriranja PID
regulatora
Stvoriti podlogu za usvajanje metoda optimalnog
upravljanjasustavima
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 3 / 22
-
Pokazatelji kvalitete : Podsjetnik na Predavanje 10
Pokazatelji kvalitete : Podsjetnik na Predavanje 10
Pri analizi kakvoce upravljanja (regulacije) promatra se
vremenskiodziv upravljane (regulirane) velicine y(t) odnosno
regulacijskoodstupanje e(t) uz djelovanje odabranog ispitnog
signala
Odziv sustava na referentnu velicinu tipa odskocne
funkcije(prijelazna funkcija s obzirom na referentnu vrijednost)
y(t) = hr(t)prikazana je na Slici 20.1
Prijelazna funkcija s obzirom na poremecajnu velicinu y(t) =
hz(t)prikazana je na Slici 20.2
Za opis prijelazne funkcije hr(t) (odnosno hz(t)) koriste se
sljedecipokazatelji kvalitete:
maksimalno nadvienje m vrijeme prvog maksimuma tm vremena
porasta tr , ta, ta,50 vrijeme ustaljivanja t vrijeme zadravanja tz
ulazno vrijeme tu
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 4 / 22
-
Pokazatelji kvalitete : Podsjetnik na Predavanje 10
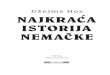
Pokazatelji kvalitete prijelazne funkcije hr(t): Podsjetnik
0%
50%
100%
y(t)=hr(t)
tz ta
t50 tu tm t
2
t
tangenta u
toki infleksije
W
tr
90%
10%
m
Slika 20.1 : Neposredni pokazatelji kvalitete odziva sustava
upravljanja naodskocnu funkciju referentne velicine
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 5 / 22
-
Pokazatelji kvalitete : Podsjetnik na Predavanje 10
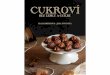
Pokazatelji kvalitete prijelazne funkcije hz(t): Podsjetnik
0
100%
y(t)=hz(t)
t
2
t
s regulatorom
bez
regulatora
m
Slika 20.2 : Neposrednji pokazatelji kvalitete odziva sustava
upravljanja naodskocnu funkciju poremecajne velicine
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 6 / 22
-
Integralni kriteriji
Integralni kriteriji (1)
Iz Slike 20.1 je vidljivo da povrina izmed_u prijelazne funkcije
hr(t) i
pravca iznosa 100% predstavlja mjeru odstupanja
regulacijskogkruga od idealnog vladanja s obzirom na referentnu
vrijednost
Jednako tako, povrina izmed_u prijelazne funkcije hz(t) (Slika
20.2) i
vremenske osi predstavlja mjeru odstupanja regulacijskog krugaod
slucaja idealnog potiskivanja smetnji
U oba se slucaja radi o ukupnoj povrini ispod
regulacijskogodstupanja e(t) = r(t) y(t) kojim se moe opisati
odstupanje odidealnog regulacijskog kruga
Prema tome, integral
Ik =
0
fk [e(t)]dt (20-1)
predstavlja mjeru kvalitete upravljanja, gdje funkcija fk [e(t)]
moeimati razlicite oblike, npr. e(t), |e(t)|t , e2(t), ...
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 7 / 22
-
Integralni kriteriji
Integralni kriteriji (2)
U takvoj integralnoj mjeri kvalitete mogu se uzeti u obzir i
vremenskederivacije regulacijskog odstupanja kao i amplitude
izvrnihvelicina
Najvanija svojstva integralnih kriterija Ik dana su u Tablici
20.1
Upravljanje je u smislu odabranog integralnog kriterija utoliko
boljeukoliko je Ik manji
Prema tome, potrebno je provesti minimizaciju Ik , pri cemu se
tomoe izvesti prikladnim izborom slobodnih (podesivih)
parametarasustava r1, r2, ..., rp (parametara regulatora)
Time integralni kriterij (20-1) poprima oblik:
Ik =
0
fk [e(t)]dt = Ik(r1, r2, ..., rp) (20-2)
a cilj je pronaci optimalne vrijednosti parametara r1 , r
2 ,...,r
p
r1 , r
2 , ..., r
p = argmin Ik(r1, r2, ..., rp) (20-3)
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 8 / 22
-
Integralni kriteriji Tablica 20.1: Svojstva integralnih
kriterija Ik
INTEGRALNI KRITERIJ SVOJSTVA
I1 =
0e(t)dt
Linearna povrina regulacijskog odstupanja:Prikladna je za
analizu jako priguenih ili mo-notonih sustava upravljanja;
jednostavna ma-tematicka obradba
I2 =
0|e(t)|dt
Linearna povrina apsolutne vrijednosti regula-cijskog
odstupanja: Prikladna je za oscilatornesustave upravljanja;
mukotrpna matematickaobradba
ISE - kriterij
I3 =
0e2(t)dt
Kvadraticna povrina regulacijskog odstupa-nja: Daje vece vrijeme
ustaljivanja t nego I2.U mnogim slucajevima moguc analiticki
prora-cun
ITAE - kriterij
I4 =
0|e(t)|tdt
Vremenski oteana linearna povrina apsolutnevrijednosti
regulacijskog odstupanja: Djelova-nje kao I2, ali dodatno uzima u
obzir trajanje re-gulacijskog odstupanja
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 9 / 22
-
Integralni kriteriji Tablica 20.1: Svojstva integralnih
kriterija Ik
INTEGRALNI KRITERIJ SVOJSTVA
I5 =
0e2(t)tdt
Vremenski oteana kvadraticna povrina regu-lacijskog odstupanja:
Djelovanje kao I3, ali do-datno uzima u obzir trajanje
regulacijskog od-stupanja
I6 =
0[e2(t) + e2(t)]dt
Poopcena kvadraticna povrina regulacijskogodstupanja: Djelovanje
povoljnije od I3; izbor te-inskog koeficijenta opcenito je
subjektivan
I7 =
0[e2(t) + u2(t)]dt
Kvadraticna povrina regulacijskog odstupanjai energetsko
forsiranje: Veca vrijednost m imaza posljedicu t bitno krace; izbor
teinskog ko-eficijenta opcenito je subjektivan
Tablica 20.1 : Svojstva integralnih kriterija Ik (ISE - Integral
of Squared Error, ITAE -Integral of Time Multiplied by Absolute
Value of Error)
Napomena: Ako u regulacijskom krugu postoji trajno regulacijsko
odstupanje e , tada
se u navedenim relacijama koristi e(t) e umjesto e(t), kako bi
integrali konvergirali
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 10 / 22
-
Integralni kriteriji ISE kriterij
ISE kriterij (1)
ISE kriterij (izracunavanje kvadraticne povrine
regulacijskogodstupanja) pokazao se veoma prikladnim u mnogim
primjenama
Pri izracunavanju kvadraticne povrine regulacijskog
odstupanja
0e2(t)dt polazi se od kompozicijskog teorema o konvoluciji u
frekvencijskom podrucju (p kompleksna varijabla
integracije):
L{f1(t)f2(t)} =
0
f1(t) f2(t)estdt =
1
2pij
c+jcj
F1(p) F2(s p)dp
(20-4)
Uz izbor s = c = 0 i f1(t) = f2(t) = f (t) dobije se
Parsevalovajednadba:
0
f 2(t)dt =1
2pij
+jj
F(p) F(s p)dp (20-5)
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 11 / 22
-
Integralni kriteriji ISE kriterij
ISE kriterij (2)
Pri tome se pretpostavlja da integrali
0|f (t)|dt i
0|f (t)|2dt
konvergiraju
Uz f (t) = e(t) iz Parsevalove jednadbe (20-5) slijedi
ISE-kriterij:
I3 =
0
e2(t)dt =1
2pij
+jj
E(s)E(s)ds (20-6)
U slucaju da je E(s) racionalna funkcija
E(s) =C(s)
D(s)=
c0 + c1s + ...+ cn1sn1
d0 + d1s + ...+ dnsn(20-7)
ciji polovi lee u lijevoj poluravnini s-ravnine tada se ISE
kriterij (20-6)moe odrediti pomocu izracunavanja reziduuma. U
Tablici 20.2dani su analiticki izrazi za ISE kriterij za sustave do
cetvrtog reda (I3,1,I3,2, I3,3, I3,4).
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 12 / 22
-
Integralni kriteriji ISE kriterij
I3,1 =c20
2d0d1
I3,2 =c21d0 + c
20d2
2d0d1d2
I3,3 =c22d0d1 +
(c21 2c0c2
)d0d3 + c
20d2d3
2d0d3 (d0d3 + d1d2)
I3,4 =
c23(d2
0d3 + d0d1d2) + (c
22 2c1c3)d0d1d4 + (c
21 2c0c2)d0d3d4 + c
20(d1d
24+ d2d3d4)
2d0d4(d0d23 d2
1d4 + d1d2d3)
Tablica 20.2 : ISE kriterij I3,n za racionalnu funkciju E(s)
reda n = 1, 2, 3, 4
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 13 / 22
-
Integralni kriteriji ISE kriterij
Odred_ivanje optimalnih parametara prema ISE kriteriju
Pretpostavimo da je potrebno odrediti optimalne
parametreregulatora regulacijskog kruga u smislu minimizacije ISE
kriterija. Uzzadanu vodecu odnosno poremecajnu velicinu ISE
kriterij postajefunkcijom parametara regulatora r1, r2, ..., rp
I3 =
0
[e(t) e]2dt = I3(r1, r2, ..., rp) (20-8)
a cilj je pronaci optimalne vrijednosi parametara r1 , r
2 , ..., r
p (vidiizraz (20-3))
Optimalne vrijednosi parametara r1 , r
2 , ..., r
p dobiju se rjeenjemsustava jednadbi (koje slijede iz tzv. nunog
uvjeta optimalnosti):
I3r1
r1,...,rp
= 0,I3r2
r1,...,rp
= 0, ...,I3rp
r1,...,rp
= 0, (20-9)
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 14 / 22
-
Empirijski postupci parametriranja regulatora Ziegler-Nicholsova
pravila prametriranja PID regulator
Ziegler-Nicholsova pravila parametriranja PID regulatora
U praksi se koriste brojna pravila za parametriranje
standardnihregulatora do kojih se dolo empirijski ili simulacijom
naodgovarajucim matematickim modelima
Veoma cesto koritena empirijska pravila za
parametriranjeregulatora definirali su Ziegler i Nichols 1942.
godine
Ova su pravila izvedena empirijski na temelju
parametriranjaregulatora, pri cemu se dobije smanjenje amplitude po
periodioscilacije u prijelaznoj funkciji zatvorenog regulacijskog
kruga zaoko 4 puta
Pravila su prikladna za parametriranje regulatora s ciljem
dobrekompenzacije utjecaja poremecajne velicine
Pri koritenju parametriranja prema Ziegleru i Nicholsu
naraspolaganju su dvije mogucnosti:
Metoda ruba stabilnosti Metoda prijelazne funkcije
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 15 / 22
-
Empirijski postupci parametriranja regulatora Ziegler-Nicholsova
pravila prametriranja PID regulator
Metoda ruba stabilnosti (Varijanta I)
Ovdje se provode sljedeci koraci:
1 Standardnom regulatoru koji se nalazi u zatvorenom
regulacijskomkrugu odabere se samo P djelovanje (iskljucena I i D
djelovanja)
2 Pojacanje KR regulatora tako se dugo povecava dok se
uzatvorenom regulacijskom krugu ne proizvedu trajne
oscilacije.Pojacanje uz koje se dobiju trajne oscilacije oznacava
se kriticnimpojacanjem regulatora KRkr (engl. ultimate gain)
3 Mjeri se iznos perioda Tkr - kriticni iznos perioda (engl.
ultimateperiod)
4 Na temelju KRkr i Tkr odred_uju se vrijednosti parametara
regulatora
(KR , TI i TD) pomocu relacija danih u Tablici 20.3
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 16 / 22
-
Empirijski postupci parametriranja regulatora Ziegler-Nicholsova
pravila prametriranja PID regulator
Tip Vrijednosti parametara
regulatora KR TI TD
P 0.5KRkr - -
PI 0.45KRkr 0.85Tkr -
PID 0.6KRkr 0.5Tkr 0.12Tkr
Tablica 20.3 : Ziegler-Nicholsova pravila za metodu ruba
stabilnosti (Varijanta I)
Napomena: Pravila za podeavanje parametara regulatora prema
Ziegleru i
Nicholsu priblina su pravila. Njima se moe priblino postici
zahtjevana
kvaliteta sustava upravljanja. Stoga se cesto za postizanje
kvalitetnijeg
upravljanja u praksi koristi simulacija na racunalu pri sintezi
sustava upravljanja,
gdje vrijednosti parametara regulatora dobivene prema Ziegler -
Nicholsovim
pravilima mogu posluiti kao dobri pocetni parametri za
optimiranje sustava
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 17 / 22
-
Empirijski postupci parametriranja regulatora Ziegler-Nicholsova
pravila prametriranja PID regulator
Metoda prijelazne funkcije (Varijanta II)
Cesto je nemoguce (tetno) dovoditi regulacijske krugove
upostrojenjima i procesima u granicno stabilno stanje
Med_utim, odred
_ivanje (mjerenje) prijelazne funkcije hp(t) procesa
(u otvorenom regulacijskom krugu) u pravilu ne
predstavljapotekocu
Stoga je druga varijanta Ziegler - Nicholsovih
pravilaparametriranja regulatora u tim slucajevima pogodnija, a
temelji
se na nagibu tangente u tocki infleksijeKpta
i na vremenu
zadravanja tz prijelazne funkcije hp(t) (Slika 20.3)
Iz vrijednosti tz iKpta
te izraza danih u Tablici 20.4 jednostavno seodrede vrijednosti
parametara regulatora
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 18 / 22
-
Empirijski postupci parametriranja regulatora Ziegler-Nicholsova
pravila prametriranja PID regulator
Mnogi industrijski procesi mogu se opisati prijelaznom
funkcijomhp(t) s cistim aperiodskim vladanjem kakvo je prikazano
naSlici 20.3
p
p
p
z a
1 t
Slika 20.3 : Aproksimacija PT - clana vieg reda pomocu PT1Tt -
clana
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 19 / 22
-
Empirijski postupci parametriranja regulatora Ziegler-Nicholsova
pravila prametriranja PID regulator
Cesto se ovakvi procesi mogu opisati
pojednostavljenimmatematickim modelom:
Gp(s) =Kp
1+ TpseTt s (20-10)
Clan s usporenjem prvog reda s mrtvim vremenom Ttzadovoljavajuce
dobro aproksimira sloeniji matematicki modelprocesa
Pri tome se prijelazna funkcija hp(t) karakterizira pomocu
trijuvelicina koje su odred
_ene tangentom u tocki infleksije W: Kp
(koeficijent pojacanja procesa), ta (vrijeme porasta) i tz
(vrijemezadravanja)
Uz grublju aproksimaciju vrijedi:
Tt = tz i Tp = ta
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 20 / 22
-
Empirijski postupci parametriranja regulatora Ziegler-Nicholsova
pravila prametriranja PID regulator
Tip Vrijednosti parametara
regulatora KR TI TD
P 1Kp
tatz
- -
PI 0.9Kp
tatz
3.33tz -
PID 1.2Kp
tatz
2tz 0.5tz
Tablica 20.4 : Ziegler-Nicholsova pravila za metodu prijelazne
funkcije(Varijanta II)
Napomena: Pravila za podeavanje parametara regulatora prema
Ziegleru i
Nicholsu priblina su pravila. Njima se moe priblino postici
zahtjevana
kvaliteta sustava upravljanja. Stoga se cesto za postizanje
kvalitetnijeg
upravljanja u praksi koristi simulacija na racunalu pri sintezi
sustava upravljanja,
gdje vrijednosti parametara regulatora dobivene prema Ziegler -
Nicholsovim
pravilima mogu posluiti kao dobri pocetni parametri za
optimiranje sustava
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 21 / 22
-
Zakljucak
Zakljucak
Parametri regulatora mogu se odrediti na vie nacina: obrad_eni
su
integralni kriteriji za parametriranje regulatora te empirijski
postupciprema Ziegler-Nicholsu
Za parametriranje regulatora pomocu integralnih kriterija
naraspolaganju su prikladni alati sadrani u Matlab/Simulinku
Ziegler-Nicholsovi postupci parametriranja PID
regulatorajednostavni su empirijski postupci koji nalaze iroku
primjenu u praksi
Iako su izvorno Ziegler-Nicholsova pravila koritena
zaparametriranje regulatora s ciljem dobre kompenzacije
utjecajaporemecajne velicine, uobicajeno se koriste kao
pocetnevrijednosti parametara regulatora koji osiguravaju dobro
slijed
_enje
referentne vrijednosti
Automatsko upravljanje :: Predavanje 20 - Parametriranje PID
regulatora c 2014 Peric,Vukic,Baotic,Vaak&Mikovic 22 / 22
UvodPokazatelji kvalitete : Podsjetnik na Predavanje
10Integralni kriterijiTablica 20.1: Svojstva integralnih kriterija
IkISE kriterij
Empirijski postupci parametriranja regulatoraZiegler-Nicholsova
pravila prametriranja PID regulatora
Zakljucak











![[Jméno příjemce] · Web viewrod mužský – pán (bez pána), hrad (bez hradu nebo i les bez lesa), muž (bez muže – životný), stroj (bez stroje – neživotný), předseda](https://img.dokumen.tips/doc/110x75/60983ad905570b20f14d24a4/jmno-pjemce-web-view-rod-musk-a-pn-bez-pna-hrad-bez-hradu.jpg)