Embed Size (px)
Citation preview
AS-84.3149 Bionics
Project work spring 2008

Project work 2008
Implement a ’Blind guide robot’ Analyze data from whisker sensors
attached to the J2B2 robot and control robot so that it follows a marked
Try to follow a path on the floor as accurately and quickly as possible
Get to know how to combine different tools for robot control (Simulink -> C)
A final competition for different groups
Whisker sensors
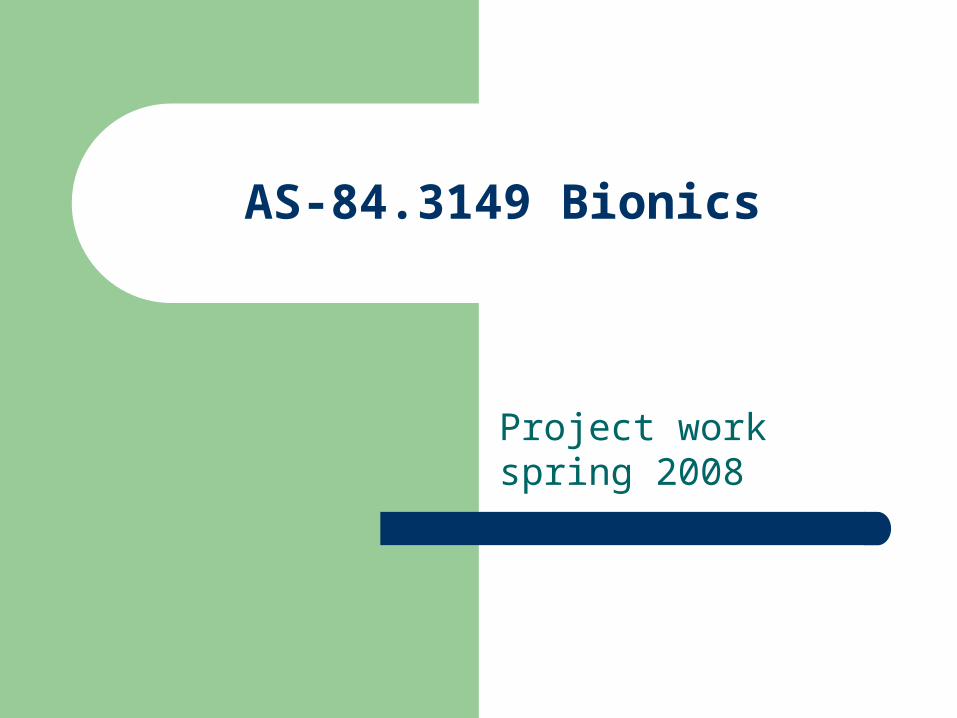
Whisker sensors are build by attaching a ’whisker’ on a capacitive microphone
This way whisker movement is sensed as change in voltage
Whisker oscillation and movement can then be analyzed in time or frequency domain
Due to non-industrial ’production’ of whiskers, they are not exactly similar
Data translation system
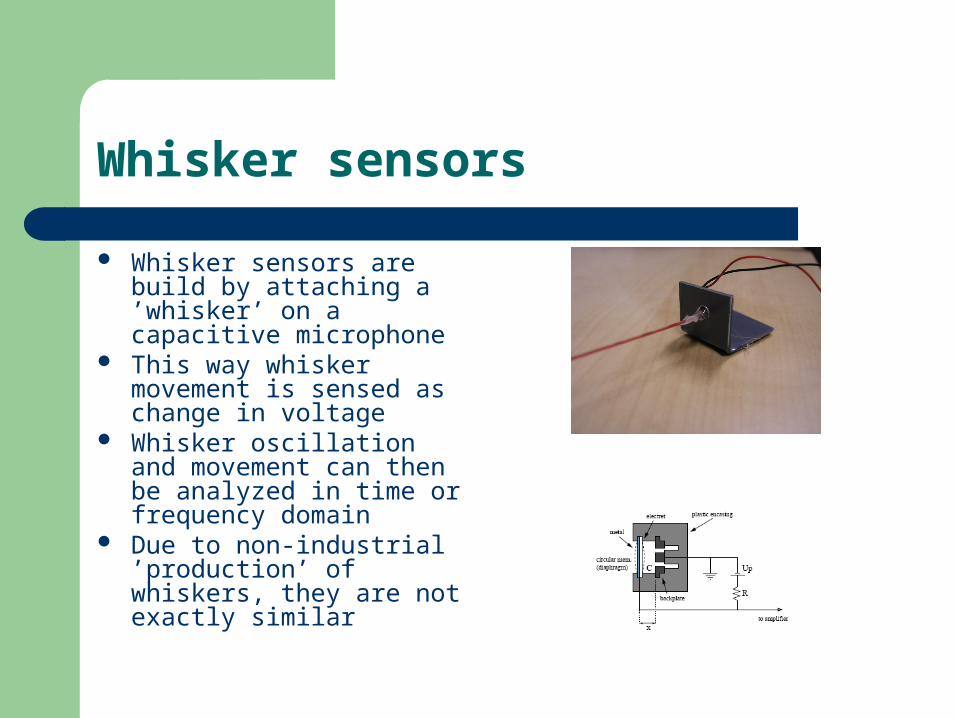
The voltage from microphone is amplified and low-pass filtered using a analog filter-amplifier board
Amplified signal is A/D converted using a DSP prosessor board. The DSP does further low-pass filtering and sends the results trough RS-232 port as data packages at 250Hz frequency
DSP
analog voltage
amplifiedanalog voltage
RS-232
Data translation system
One data package contains a starting byte (0x44), 8 data bytes and a end byte, which is contains package index (0-255)
Each data byte corresponds to voltage output from 0 to 255, nominal (no movement) is 127
The whiskers used for project are 1, 2, 3 and 5.
0x44 8 data bytes index byte
Controlling the robot
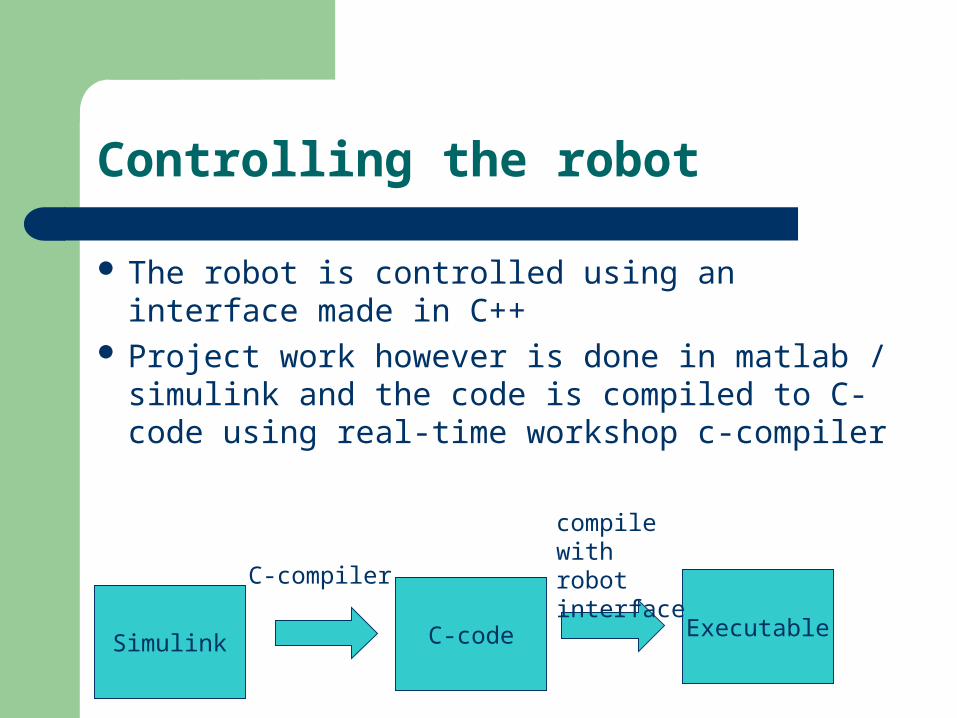
The robot is controlled using an interface made in C++
Project work however is done in matlab / simulink and the code is compiled to C-code using real-time workshop c-compiler
Simulink C-code Executable
C-compiler
compile withrobotinterface
Simulink
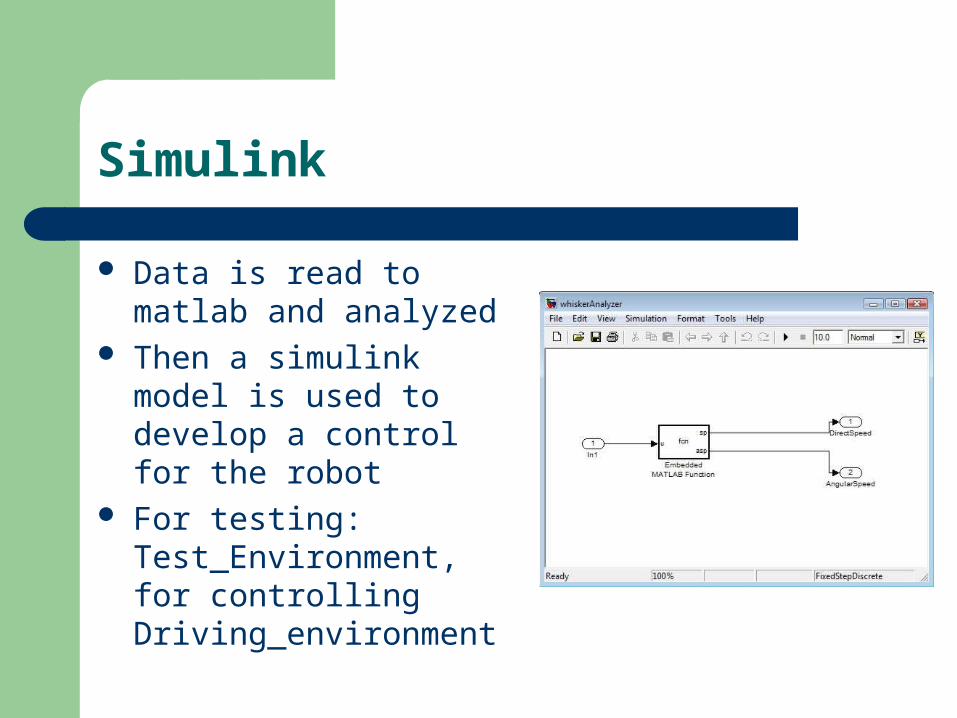
Data is read to matlab and analyzed
Then a simulink model is used to develop a control for the robot
For testing: Test_Environment, for controlling Driving_environment
Compiling
Compilation to c-code is compiled easily with simulink, be sure to follow project work instructions carefully!
Compiling with interface is done with Devcpp-programming environment, you don’t have to make many changes, compilation should be easy
Connecting to robot
When running the code, the laptop must be connected to robot with ethernet cable with following connection settings:– IP: 192.168.10.2, Gateway: 192.168.10.1
If you want to use internet change the settings to:– IP: 130.233.120.81, Gateway: 130.233.120.254

Testing with robot
There is a simple ready-made user interface for robot control:– Drive robot with ’a,w,s and d’– Terminate control thread for whiskers ’t’– Exit application ESC
Read the code in main.cpp for more accurate instructions
General stuff
ALWAYS leave the robot power chord on when not working (and maybe also when working)
Read instructions for robot use from: http://automation.tkk.fi/AS-84-3145-ProjectWork/Important
Reserve the robot beforehand using reservation book at robot room (2551)
Outline of project work
Analyze data from whiskers using matlab Create a control to follow, using whiskers
and robot bumpers and test it Write a report of the data-analysis and
algorithm implementation A final competition between groups