Embed Size (px)
DESCRIPTION
Appunti di Analisi 2 dalle lezioni del professor Francesco Serra Cassano, professore ordinario di Analisi Matematica all'Università di Trento.Gli appunti sono stati presi nell'anno accademico 2012/2013, rielaborati ed integrati cercando di renderli più chiari possibile. Sono rilasciati sotto licenza Creative Commons BY-SA.Collabora con integrazioni e/o correzioni su GitHub: http://github.com/matteosecli/Appunti_di_Analisi_II
Citation preview
Appunti di
Analisi II
Dalle lezioni del corso di Francesco Serra Cassano
Matteo Seclı
A.A. 2012/2013

Versione: 20130823-083351
Figura 1: Logo CC BY-SA
Questo documento e rilasciato in tutte le sue parti sotto licenza Creative Commons CC BY-SA.
Per eventuali file non qui specificati che possiedono una licenza differente, fai riferimento agli stessi.
CC BY-SA significa che puoi redistribuire o modificare questo testo, a patto che usi la stessa licenza,
che venga riconosciuta la paternita dell’opera e che eventuali modifiche o revisioni non ufficiali siano
messe in evidenza in modo chiaro, per preservare l’identita dell’opera originale (per maggiori dettagli,
consultare ad esempio Wikipedia). I metadati sulla licenza sono inoltre incorporati nel documento
stesso. E bene sottolineare che l’opera e protetta dai diritti d’autore, sebbene la sua modifica sia libera.
Parte del layout e dell’organizzazione e ispirata a PhDtemplateLaTeX, per cui ringrazio il suo
autore.
Proseguendo nella lettura, accetti automaticamente le condizioni di rilascio.
Contatti: [email protected]
ii
Indice
1 Calcolo in piu variabili 1
1.1 Metrica (euclidea) su R2 e Topologia . . . . . . . . . . . . . . . . . . . . 1
1.2 Successioni e topologia di R2 . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Estensione della metrica e topologia a Rn con n ≥ 2 . . . . . . . . . . . 11
1.4 Funzioni continue di piu variabili (a valori reali) . . . . . . . . . . . . . . 13
1.5 Differenziale di una funzione . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5.1 Estensione al caso dimensionale n ≥ 3 . . . . . . . . . . . . . . . 20
1.5.2 Condizioni sufficienti per la differenziabilita . . . . . . . . . . . . 22
1.5.3 Derivate (parziali) successive . . . . . . . . . . . . . . . . . . . . 26
1.6 Regola di derivazione composta (RDC) . . . . . . . . . . . . . . . . . . . 28
1.6.1 Regola di composizione di una funzione composta . . . . . . . . . 28
1.6.2 Funzioni continue e differenziabili da Rn a Rm . . . . . . . . . . 32
1.7 Formula di Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.7.1 Applicazione al calcolo dei limiti . . . . . . . . . . . . . . . . . . 43
1.7.2 Caso m = 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2 Massimi e minimi per funzioni di piu variabili 46
2.1 Il Teorema di Fermat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.2 Il Teorema di Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.3 Ricerca di massimi e minimi . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.3.1 Ricerca del massimo e minimo (assoluto) di una funzione continua
definita su un insieme chiuso e limitato . . . . . . . . . . . . . . 58
iii

INDICE
2.3.2 Ricerca dei punti di massimo e minimo nella frontiera di un insieme 59
2.3.2.1 I Metodo: parametrizzazione della frontiera . . . . . . . 59
2.3.2.2 II Metodo: la frontiera di un insieme come vincolo . . . 61
2.3.3 Interpretazione geometrica della condizione di punto stazionario
vincolato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3 Teorema delle funzioni implicite ed applicazioni 67
3.1 Caso n = 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.2 Caso n = 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.2.1 Applicazione: equazione del piano tangente ad un vincolo V ⊂ R3 74
3.3 Caso generale del Teorema delle funzioni implicite . . . . . . . . . . . . 74
3.3.1 Applicazione: regola dei moltiplicatori di Lagrange nel caso generale 77
4 Introduzione alle ODEs (e sistemi di ODEs) non lineari 78
4.1 Cenni sugli spazi metrici . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.2 ODEs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.2.1 Caso n = 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n . . . . . . . . . . 95
4.3.1 Sistemi di ODEs (del primo ordine) autonomi . . . . . . . . . . . 98
4.3.1.1 Interpretazione cinematica . . . . . . . . . . . . . . . . 101
4.3.1.2 Integrali primi di (S) . . . . . . . . . . . . . . . . . . . 102
5 Serie di Fourier 112
Bibliografia 129
iv
Capitolo 1
Calcolo in piu variabili
Versione: 20130823-083351
1.1 Metrica (euclidea) su R2 e Topologia
Definizione 1.1.1. Si chiama metrica euclidea su R2 (o anche distanza euclidea su
R2) la funzione
d : R2 × R2 −→ [0, +∞)
definita da:
d(P, Q)def=√
(x2 − x1)2 + (y2 − y1)2
se P = (x1, y1), Q = (x2, y2) ∈ R2.
Esercizio. Mostrare che la distanza d verifica le seguenti proprieta:
(d1) d(P, Q) = 0⇐⇒ P = Q
(d2) d(P, Q) = d(Q, P ) ∀P,Q ∈ R2
(d3) (Disuguaglianza triangolare) d(P, Q) ≤ d(P, R) + d(R, Q) ∀P,Q,R ∈ R2
Piu in generale, dato un (qualunque) insieme X, diamo la seguente definizione.
Definizione 1.1.2. Si chiama distanza (o metrica) su X una funzione
d : X ×X −→ [0, +∞)
verificante le proprieta (d1), (d2) e (d3).
1

1. CALCOLO IN PIU VARIABILI
Definizione 1.1.3. Dato P0 ∈ R2, P0 = (x0, y0) fissato, e dato r > 0 fissato, si chiama
intorno (sferico) di centro P0 e raggio r > 0 (in R2) l’insieme:
I(P0, r)︸ ︷︷ ︸(Notazione italiana)
=
(Notazione internazionale, “Ball”)︷ ︸︸ ︷B(P0, r) = {P ∈ R2 : d(P, P0) < r} =
= {(x, y) ∈ R2 : (x− x0)2 + (y − y0)2 < r2}
Detto in modo spicciolo, e “il cerchio di centro P0 e raggio r a cui tagliate la buccia”
[cit. prof].
P0
r= B(P0, r)
x
y
Definizione 1.1.4. Sia A ⊆ R2.
(i) Un punto P0 ∈ R2 si dice punto di accumulazione di A se:
(A \ {P0}) ∩ B(P0, r) 6= ∅ ∀ r > 0
(ii) Un punto P0 ∈ R2 si dice punto isolato di A se:
∃ r0 > 0 : A ∩ B(P0, r0) = {P0}
(iii) Un punto P0 ∈ R2 si dice punto di frontiera di A se:
A ∩ B(P0, r) 6= ∅ e (R2 \A) ∩ B(P0, r) 6= ∅, ∀ r > 0
L’insieme dei punti di frontiera di A si chiama frontiera di A e si denota col
simbolo ∂A.
2
1.2 Successioni e topologia di R2
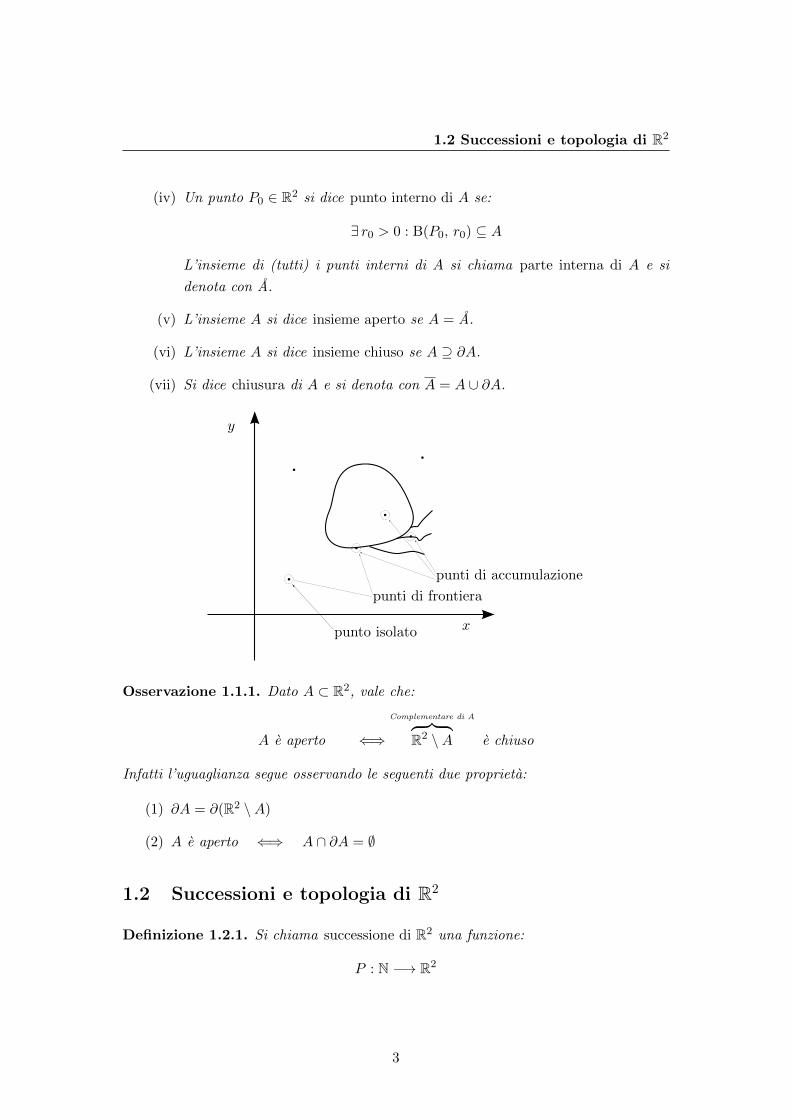
(iv) Un punto P0 ∈ R2 si dice punto interno di A se:
∃ r0 > 0 : B(P0, r0) ⊆ A
L’insieme di (tutti) i punti interni di A si chiama parte interna di A e si
denota con A.
(v) L’insieme A si dice insieme aperto se A = A.
(vi) L’insieme A si dice insieme chiuso se A ⊇ ∂A.
(vii) Si dice chiusura di A e si denota con A = A ∪ ∂A.
x
y
punti di accumulazione
punti di frontiera
punto isolato
Osservazione 1.1.1. Dato A ⊂ R2, vale che:
A e aperto ⇐⇒Complementare di A︷ ︸︸ ︷
R2 \A e chiuso
Infatti l’uguaglianza segue osservando le seguenti due proprieta:
(1) ∂A = ∂(R2 \A)
(2) A e aperto ⇐⇒ A ∩ ∂A = ∅
1.2 Successioni e topologia di R2
Definizione 1.2.1. Si chiama successione di R2 una funzione:
P : N −→ R2
3
1. CALCOLO IN PIU VARIABILI
dove
P (h) = Ph (h = 1, 2, . . .)
e Ph si chiama termine h-esimo della successione P . Tipicamente una successione di
R2 si denota con
{Ph}h∈N o con (Ph)h∈N
Osserviamo che, data
“h∈N”si omette︷ ︸︸ ︷(Ph)h ⊂ R2, allora Ph = (xh, yh), con (xh)h, (yh)h ⊂
R successioni di numeri reali.
Definizione 1.2.2 (limite di una successione in R2). Siano (Ph)h ⊂ R2 e P0 ∈ R2. Si
dice che la successione (Ph)h ammette limite P0 (in R2), e si scrive che ∃ limh→+∞
Ph = P0
(in R2) se
∃ limh→+∞
d(Ph, P0) = 0 (in R)
cioe
∀ ε > 0 ∃h = h(ε) ∈ N : d(Ph, P0) < ε, ∀h(≥)> h
Ma. . . operativamente? Ricordiamo innanzitutto che, presi Ph(xh, yh) e P0(x0, y0),
allora d(Ph, P0) =√
(xh − x0)2 + (yh − y0)2. Ci avvaliamo quindi del risultato del
seguente teorema.
Teorema 1.2.1. Siano (Ph)h ⊂ R2 e P0 ∈ R2.
(i) Se Ph = (xh, yh) e P0 = (x0, y0), allora vale che:
∃ limh→+∞
Ph = P0 (in R2) ⇐⇒
∃ limh→+∞ xh = x0
∃ limh→+∞ yh = y0
(in R)
(ii) (Criterio di Cauchy)
∃ limh→+∞
Ph = P0 (in R2)
m
∀ ε > 0 ∃h = h(ε) ∈ N tale che d(Ph, Pk) < ε ∀h, k > h
Dimostrazione:
(i) Ricordiamo che, dati a, b ∈ R, allora
4
1.2 Successioni e topologia di R2
|a|+ |b|√2≤√a2 + b2 ≤ |a|+ |b| (1.1)
Scegliendo come a = xh − x0 e b = yh − y0 otteniamo che:
|xh − x0|+ |yh − y0|√2
≤ d(Ph, P0) ≤ |xh − x0|+ |yh − y0| (1.2)
Usando il criterio del confronto per successioni di numeri reali su (1.2), segue
la tesi (in tutti e due i versi).
(ii) Il verso (⇒) e banale, perche se d(Ph, Pk) < ε, allora anche |xh − xk| < ε e
|yh − yk| < ε, quindi sono successioni di Cauchy.
(⇐) Scegliendo a = xh − xk e b = yh − yk, dalla (1.1) segue che:
|xh − xk|+ |yh − yk|√2
≤ d(Ph, Pk) ≤ |xh − xk|+ |yh − yk| ∀h, k ∈ N (1.3)
Poiche (xh)h, (yh)h ⊂ R, applicando la (1.3) e il Criterio di Cauchy per
successioni di numeri reali, segue la tesi.
�
Osservazione 1.2.1. Dal punto (i) del teorema precedente e dall’unicita del limite per
successioni di numeri reali, segue l’unicita del limite per successioni di R2.
Proposizione 1.2.1. Sia A ⊂ R2.
(i) P0 ∈ R2 e un punto di accumulazione per A se e solo se ∃ (Ph)h ⊂ A \ {P0}tale che ∃ lim
h→+∞Ph = P0.
(ii) A e chiuso ⇐⇒ Per ogni successione (Ph)h ⊂ A con limh→+∞
Ph = P0 ∈R2 ⇒ P0 ∈ A.
Dimostrazione: (Vedi Esercizio 4 del Foglio 1).
�
Definizione 1.2.3. Siano A ⊆ R2, P0 ∈ R2 fissato, con P0 = (x0, y0) punto di
accumulazione di A. Sia f : A −→ R, e sia L ∈ R. Si dice che
5

1. CALCOLO IN PIU VARIABILI
limP→P0
f(P ) = L o, equivalentemente, lim(x, y)→(x0, y0)
f(x, y) = L
se, per definizione, ∀ ε > 0 ∃ δ = δ(P0, ε) > 0 tale che
|f(P )− L| < ε ∀P ∈ (A \ {P0}) ∩B(P0, δ)
Teorema 1.2.2 (Caratterizzazione del limite di una funzione tramite il limite di suc-
cessioni). Siano A ⊆ R2, P0 ∈ R2 fissato, con P0 = (x0, y0) punto di accumulazione di
A. Sia f : A −→ R, e sia L ∈ R. Allora
(1) ∃ limP→P0
f(P ) = L
m
(2) ∀ (Ph)h ⊂ A\{P0} con limh→+∞
Ph = P0 (in R2) =⇒ ∃ limh→+∞
f(Ph) = L (in R)
P0A
x
y
P2
P1
R
f
Lf(Ph)
Dimostrazione: Il verso (⇒) e ovvio, per la definizione di limite di una successione
reale.
Dimostriamo il verso (⇐). Procediamo per assurdo, ossia supponiamo che
@ limP→P0
f(P )
In altri termini,
∃ ε0 > 0 : ∀ δ > 0 ∃Pδ ∈ (A \ {P0}) ∩B(P0, δ) tale che |f(Pδ)− L| ≥ ε0
Potendo scegliere δ in modo arbitrario, scegliamo δ = 1h , dove h ∈ N≥1. In corrispon-
denza di tale δ, esiste un P 1h≡ Ph ∈ (A \ {P0}) ∩B(P0,
1h) tale che
6

1.2 Successioni e topologia di R2
(3) |f(Ph)− L| ≥ ε0 > 0
Pertanto, abbiamo costruito una successione (Ph)h tale che 0 ≤ d(Ph, P0) < 1h e dunque
limh→+∞
d(Ph, P0) = 0def.⇐⇒ (4) ∃ lim
h→+∞Ph = P0 (in R2)
P0
x
y
Ph
Per ipotesi, questo significa che
∃ limh→+∞
f(Ph) = L
ossia, utilizzando la definizione,
∀ ε > 0 ∃h = h(ε) ∈ N : |f(Ph)− L| < ε, ∀h > h
In particolare, abbiamo che
|f(Ph)− L| < ε0
in contraddizione con (3).
�
Come corollario di questo teorema, otteniamo il seguente risultato.
Corollario 1.2.1 (Unicita del limite). Siano A ⊆ R2, P0 ∈ R2 fissato, con P0 =
(x0, y0) punto di accumulazione di A. Sia f : A −→ R, e siano L1, L2 ∈ R tali che
∃ limP→P0
f(P ) = L1
e
∃ limP→P0
f(P ) = L2
=⇒ L1 = L2
7

1. CALCOLO IN PIU VARIABILI
Dimostrazione: La dimostrazione segue dal teorema precedente e dall’unicita del
limite per successioni di numeri reali.
�
Teorema 1.2.3 (Operazioni per limiti di funzioni di due variabili). Siano f, g :
A −→ R, dove A ⊆ R2, P0 ∈ R2 punto di accumulazione per A. Supponiamo che
∃ limP→P0
f(P ) = L ∈ R, e che ∃ limP→P0
g(P ) = M ∈ R. Allora:
(i) ∃ limP→P0
(f + g)(P ) = L+M
(ii) ∃ limP→P0
(f · g)(P ) = L ·M
(iii) Se g(P ) 6= 0 ∀P ∈ A, e M 6= 0, allora ∃ limP→P0
(f
g
)(P ) =
L
M
(iv) Supponiamo che f(P ) ≤ g(P ) ∀P ∈ A \ {P0}. Allora L ≤M .
(v) Sia F : R −→ R continua, allora ∃ limP→P0
(F ◦ f)(P ) = F (L)
Dimostrazione:
(i) Usando il teorema sulla caratterizzazione del limite tramite successioni, per
ipotesi abbiamo che ∃ limh−→+∞
f(Ph) = L e ∃ limh−→+∞
g(Ph) = M . Defi-
nendo (ah)h + (f(Ph))h e (bh)h + (g(Ph))h, sappiamo che (ah)h e (bh)h
hanno limite finito rispettivamente L e M se e solo se (rispettivamente)
(ah−L)h e (bh−M)h sono infinitesime, che a loro volta sono infinitesime se e
solo se (|ah −L|)h e (|bh −M |)h sono infinitesime. Poiche una somma di suc-
cessioni infinitesime e ancora infinitesima, abbiamo che (|ah−L|+ |bh−M |)he infinitesima. Aggiungendo a questo fatto la disuguaglianza
|ah + bh − (L+M)| ≤ |ah − L|+ |bh −M |
otteniamo che (ah + bh − (L+M))h e infinitesima, ossia limP→P0
(f + g)(P ) =
L+M .
8

1.2 Successioni e topologia di R2
(ii) Si procede come nella dimostrazione (i), utilizzando il fatto che il prodotto di
una successione infinitesima per una successione limitata e ancora infinitesima
e le disuguaglianze
|ahbh −LM | ≤ |ahbh − ahM |+ |ahM −LM | ≤ |ah| · |bh −M |+ |M | · |ah −L|
(iii) Si procede come nella dimostrazione (i), utilizzando il fatto che il prodotto di
una successione infinitesima per una successione limitata e ancora infinitesi-
ma, l’uguaglianza
| 1
bh− 1
M| = 1
|Mbh|· |bh −M |
e il fatto che la successione(
1|Mbh|
)h
e limitata.
(iv) Poiche f(P ) ≤ g(P ) ∀P ∈ A \ {P0}, possiamo supporre che ∃λf(P ) =
λ(f(P )) > 0 tale che f(P ) + λf(P ) = g(P ) ∀P ∈ A \ {P0}.
Passando a limite e utilizzando (i), otteniamo che
limP→P0
(f(P )+λf(P )) = limP→P0
g(P ) ⇐⇒ limP→P0
(f(P ))+ limP→P0
(λf(P )) = limP→P0
g(P )
ossia L ≤M .
(v) Proviamo che, per ogni successione (Ph)h ⊂ A \ {P0} con limh→+∞
Ph = P0,
vale che
∃ limh→+∞
F (f(Ph)) = F (L) (in R)
Sia (Ph)h ⊂ A \ {P0} tale che limh→+∞
Ph = P0. Per ipotesi, se denotia-
mo con ah + f(Ph) (h ∈ N), allora per (1) =⇒ (2) del teorema sulla
caratterizzazione del limite, limh→+∞
ah = L (in R).
Consideriamo la successione (F (ah))h ⊂ R. Poiche F e continua nel punto L,
per definizione di funzione continua su R segue che ∃ limh→+∞
F (ah) = F (L).
La tesi e dimostrata.
�
Corollario 1.2.2 (Teorema dei due carabinieri). Siano f, g, h : A −→ R con A ⊆R2, P0 ∈ R2 punto di accumulazione per A. Supponiamo che
9

1. CALCOLO IN PIU VARIABILI
(i) g(P ) ≤ f(P ) ≤ h(P ) ∀P ∈ A \ {P0}
(ii) ∃ limP→P0
g(P ) = limP→P0
h(P ) = L ∈ R
Allora
∃ limP→P0
f(P ) = L
Esempio (i). Verificare che
lim(x, y)→(0, 0)
sin(x2 + y2)
x2 + y2= 1
Dimostrazione: Definiamo h(x, y) : R2 \ {(0, 0)} −→ R tale che
h(x, y) =sin(x2 + y2)
x2 + y2
Definiamo poi f(x, y) : R2 \ {(0, 0)} −→ R tale che f(x, y) = x2 + y2 e F : R −→ Rtale che
F (t) +{
sin(t)t t 6= 0
1 t = 0
E ovvio che ∃ lim(x, y)→(0, 0)
f(x, y) = 0. D’altra parte, F e continua in R (per definizione).
Applicando il punto (v) del precedente teorema, otteniamo che
∃ lim(x, y)→(0, 0)
h(x, y) = F (0) = 1
�
Esempio (ii). Calcolare, se esiste,
lim(x, y)→(0, 0)
xy
x2 + y2
Dimostrazione: Dimostriamo che tale limite non esiste.
Il limite, se esiste, deve essere uguale da tutte le direzioni. Non solo dalle “dire-
zioni” formate da rette, ma anche da quelle (ad esempio) formate da parabole. Sce-
gliamo quindi la “direzione” y = mx e restringiamo f a tale retta, cioe consideriamo
f(x, mx) = x(mx)x2+(mx)2 = mx2
x2(1+m2)= m
1+m2 , x 6= 0. Sulla retta y = x (m = 1)
10

1.3 Estensione della metrica e topologia a Rn con n ≥ 2
scegliamo la successione Ph = ( 1h ,
1h), h ∈ N≥1 , mentre sulla retta y = 2x (m = 2)
scegliamo la successione Qh = ( 1h ,
2h), h ∈ N≥1. E immediato verificare che
∃ limh→+∞
Ph = limh→+∞
Qh = (0, 0)
D’altra parte, f(Ph) = 12 ∀h ∈ N, e f(Qh) = 2
5 ∀h ∈ N, da cui
∃ limh→+∞
f(Ph) =1
26= 2
5= lim
h→+∞f(Qh)
⇓
@ lim(x, y)→(0, 0)
xy
x2 + y2
�
1.3 Estensione della metrica e topologia a Rn con n ≥ 2
Definizione 1.3.1. Si definisce distanza (euclidea) su Rn la funzione
d : Rn × Rn −→ [0, +∞)
definita da:
d(P, Q)def=√
(x1 − y1)2 + (x2 − y2)2 + . . .+ (xn − yn)2
se P = (x1, x2, . . . , xn), Q = (y1, y2, . . . , yn) ∈ Rn.
Esercizio. Mostrare che la distanza d verifica le seguenti proprieta:
(d1) d(P, Q) = 0⇐⇒ P = Q
(d2) d(P, Q) = d(Q, P ) ∀P,Q ∈ Rn
(d3) (Disuguaglianza triangolare) d(P, Q) ≤ d(P, R) + d(R, Q) ∀P,Q,R ∈ Rn
Definizione 1.3.2. Dato P0 = (x01, . . . , x
0n) ∈ Rn e r > 0, si chiama intorno (sferico)
di centro P0 e raggio r > 0 l’insieme definito da:
B(P0, r) = {P ∈ Rn : d(P, P0) < r} = {(x1, . . . , xn) ∈ Rn : (x1−x01)2+. . .+(xn−x0
n)2 < r2}
11

1. CALCOLO IN PIU VARIABILI
In generale, possiamo dire che le nozioni topologiche introdotte per n = 2 e la
definizione di limite per funzioni a due variabili si estendono al caso n ≥ 3.
Riflettiamo ora un momento su un’implicita identificazione che si sta facendo, ossia
quella tra punti e vettori. Ad esempio, P = (x, y) e un punto di R2, ma si scrive spesso
anche P =→P = (x, y), intendendolo come vettore.
Alle luce di questo, diamo la seguente definizione.
Definizione 1.3.3 (di norma in Rn). Si chiama norma su Rn una funzione
N : Rn −→ [0, +∞)
verificante le seguenti proprieta:
(N1) N(P ) = 0 ⇐⇒ P = 0 = (0, . . . , 0) ∈ Rn
(N2) N(λP ) = |λ|N(P ) ∀λ ∈ R, ∀P ∈ Rn
(N3) (Disuguaglianza triangolare) N(P +Q) ≤ N(P ) + N(Q) ∀P, Q ∈ Rn
0
Q
P
Q+ P
Definizione 1.3.4 (di norma euclidea). Si chiama norma (euclidea) in Rn la funzione
|| · || : Rn −→ [0, +∞) tale che
||P || =√x2
1 + x22 + . . .+ x2
n se P = (x1, . . . , xn) ∈ Rn
Osservazione 1.3.1.
(i) d(P, Q) = ||P −Q|| ∀P, Q, R ∈ Rn.
In particolare, da quest’osservazione discende che:
d(P +R, Q+R) = d(P, Q)
(ii) Notiamo che ||P || = √P • P dove, per definizione, dati due vettori P, Q ∈ Rn,
P •Q = P TQ =
n∑
i=1
xiyi
12

1.4 Funzioni continue di piu variabili (a valori reali)
se P = (x1, . . . , xn) e Q = (y1, . . . , yn). Poiche questa definizione e stata data
inizialmente dai fisici, ricordiamo che:
P •Q = ||P || · ||Q|| cos(ϑ)
dove ϑ e l’angolo compreso fra i due vettori.
(iii) (disuguaglianza di Cauchy-Schwarz)
|P •Q| ≤ ||P || · ||Q|| ∀P, Q ∈ Rn
(Ex. 11 Foglio 1). Provare che da (C-S) segue la proprieta (N3), e dunque la
(d3).
Il risultato (ottenuto peraltro da Riemann) e notevolissimo, poiche ci consente
di affermare che basta un prodotto scalare per indurre una distanza!
1.4 Funzioni continue di piu variabili (a valori reali)
Definizione 1.4.1. Siano A ⊆ Rn, f : A −→ R, P0 ∈ A.
(i) Si dice che f e continua nel punto P0 ∈ A se
(1) P0 e un punto isolato di A, cioe, per definizione, ∃ r0 > 0 tale che
A ∩ B(P0, r0) = {P0}
oppure
(2) P0 e un punto di accumulazione per A e ∃ limP→P0
f(P ) = f(P0)
(ii) f si dice continua su A se f e continua in ogni punto P0 ∈ A
Dalle proprieta sui limiti di funzioni seguono le seguenti proprieta per funzioni
continue.
Proposizione 1.4.1. Siano f, g : A −→ R e supponiamo che f e g siano continue in
un punto assegnato P0 ∈ A. Allora
(i) La funzione f + g : A −→ R e continua nel punto P0.
(ii) La funzione f · g : A −→ R e continua nel punto P0.
13

1. CALCOLO IN PIU VARIABILI
(iii) Se g(P ) 6= 0 ∀P ∈ A , la funzionef
g: A −→ R e continua nel punto P0.
(iv) Se F : R −→ R e continua (in realta basterebbe richiedere la continuita nel
trasformato secondo f di P0, ossia f(P0)), la funzione f = F ◦ f : A −→ Re continua nel punto P0.
Osservazione 1.4.1 (importante). Consideriamo il seguente esempio:
f : R2 −→ R, f(x, y) =
xyx2+y2 (x, y) 6= (0, 0)
0 (x, y) = (0, 0)
Abbiamo visto che @ limP→(0, 0)
f(P ), pertanto f non e continua nel punto P0 = (0, 0).
Ma se noi fissiamo x ∈ R e consideriamo R 3 y 7−→ f(x, y), tale funzione e
continua (come funzione di una variabile reale). Analogamente accade fissando l’altra
variabile.
Quindi non possiamo vedere la continuita “congelando” ad una ad una le variabili!
Introdotta la continuita, a questo punto sorge automaticamente una domanda. . .
Problema: Nozione di “derivata/e” per una funzione di due variabili.
Il problema di trovare una qualche nozione di derivata si traduce in una prima istanza
nella definizione delle cosiddette derivate parziali.
Definizione 1.4.2 (di derivata parziale). Sia A ⊂ R2 aperto(1), e siano f : A −→ R,
P0 = (x0, y0) ∈ A fissato. Poiche A e aperto, ∃ δ0 > 0 tale che:
Q + [x0 − δ0, x0 + δ0]× [y0 − δ0, y0 − δ0] ⊂ A
P0A
x
y
x0 − δ0 x0 + δ0
x0
Qy0 − δ0
y0 + δ0
y0
(1)Se prendo un punto isolato, non faccio variare un bel niente!
14

1.4 Funzioni continue di piu variabili (a valori reali)
Fissato x0, possiamo considerare il rapporto incrementale
([−δ0, δ0] \ {0}) 3 h 7−→ f(x0, y0 + h)− f(x0, y0)
h
e analogamente, fissato y0,
([−δ0, δ0] \ {0}) 3 h 7−→ f(x0 + h, y0)− f(x0, y0)
h
Queste due funzioni sono ben definite. Allora
(i) f si dice derivabile (parzialmente) rispetto alla direzione x nel punto P0 se
∃ limh→0
f(x0 + h, y0)− f(x0, y0)
h∈ R def.
=∂f
∂x(P0) = D1f(P0)
(ii) f si dice derivabile (parzialmente) rispetto alla direzione y nel punto P0 se
∃ limh→0
f(x0, y0 + h)− f(x0, y0)
h∈ R def.
=∂f
∂y(P0) = D2f(P0)
(iii) Se ∃ ∂f∂x
(P0) e ∃ ∂f∂y
(P0), si dice che esiste il vettore gradiente di f nel
punto P0 e si denota questo vettore con
∇f(P0) +(∂f
∂x(P0),
∂f
∂y(P0)
)∈ R2
Osservazione 1.4.2. Se ∃∇f(P ) in ogni punto di A e definita una funzione vettoriale
∇f : A 3 P 7−→ ∇f(P ) +(∂f
∂x(P ),
∂f
∂y(P )
)∈ R2
che descrive un cosiddetto campo vettore.
Ad esempio, −∇f =→G, dove
→G in fisica e il campo di gravita, e un campo vettore.
Problema: La definizione di vettore gradiente di una funzione in un punto rappre-
senta una buona nozione di “derivata”?
Esempio.
f : R2 −→ R, f(x, y) =
xyx2+y2 (x, y) 6= (0, 0)
0 (x, y) = (0, 0)
Si vede (da fare per esercizio) che ∃∇f(0, 0) = (0, 0), ma f non e continua in (0, 0)!
Noi, invece, vorremmo che la funzione fosse continua per poter fare la “derivata”, come
nel caso di una variabile.
Prendiamo ora in considerazione la nozione di punto tangente al grafico, e intro-
duciamo la definizione di funzione differenziabile in un punto e di differenziale di una
funzione.
15

1. CALCOLO IN PIU VARIABILI
1.5 Differenziale di una funzione
Ricordiamo cosa accade nel caso n = 1.
Esercizio. Siano A = (a, b), x0 ∈ (a, b), f : (a, b) −→ R, m ∈ R.
f e derivabile nel punto x0 e f ′(x0) = m
m
∃ limx→x0
f(x)− [m(x− x0) + f(x0)]
|x− x0|= 0
dove (lo ricordiamo), m(x− x0) + f(x0) e l’equazione della retta tangente al grafico di
f data da y = f(x0) + f ′(x0)(x− x0) e |x− x0| = d(x, x0).
Se definiamo l’applicazione lineare L : R −→ R definita da
L(v) = mv, v ∈ R
otteniamo che
f e derivabile nel punto x0 e vale che f ′(x0) = m
m
∃L : R −→ R lineare tale che limx→x0
f(x)− [L(x− x0) + f(x0)]
d(x− x0)= 0
Vediamo ora cosa succede per n = 2.
Sia A ⊆ R2 aperto, f : A −→ R, P0 = (x0, y0) ∈ A.
16
1.5 Differenziale di una funzione
P0 = (x0, y0)
π
f
f(x0, y0)
Gf
B(P0, δ0) ⊂ A
y
x
z
A
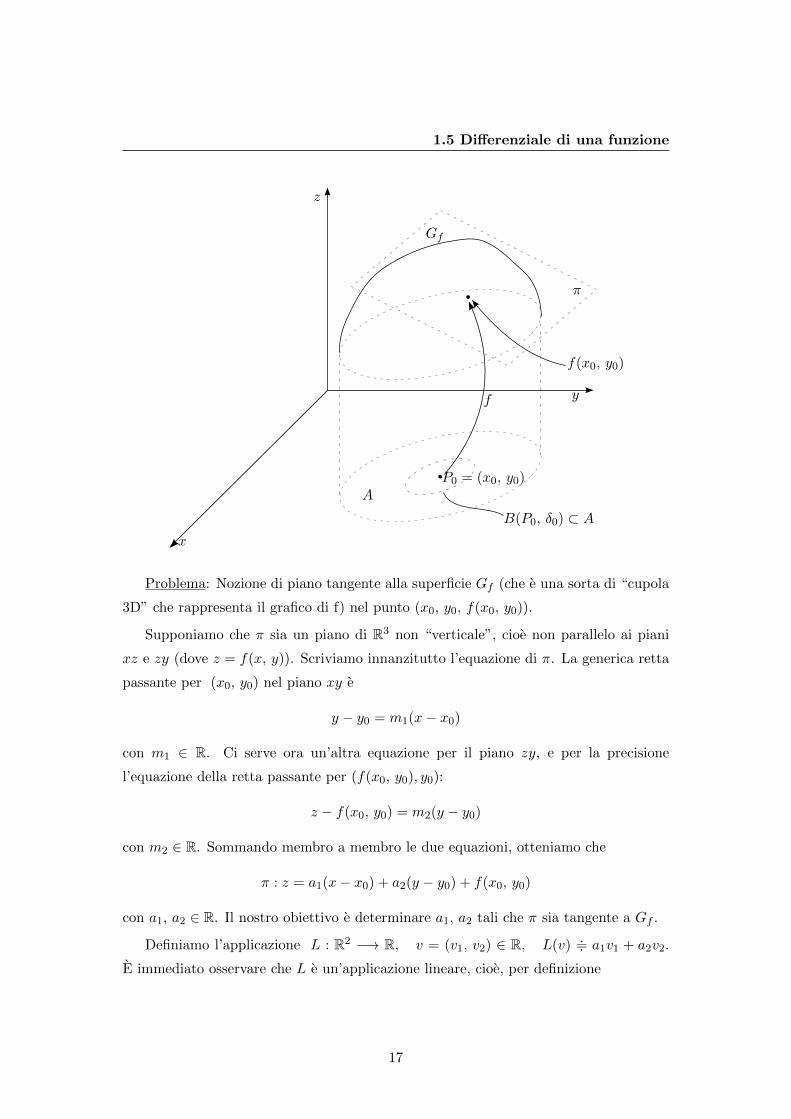
Problema: Nozione di piano tangente alla superficie Gf (che e una sorta di “cupola
3D” che rappresenta il grafico di f) nel punto (x0, y0, f(x0, y0)).
Supponiamo che π sia un piano di R3 non “verticale”, cioe non parallelo ai piani
xz e zy (dove z = f(x, y)). Scriviamo innanzitutto l’equazione di π. La generica retta
passante per (x0, y0) nel piano xy e
y − y0 = m1(x− x0)
con m1 ∈ R. Ci serve ora un’altra equazione per il piano zy, e per la precisione
l’equazione della retta passante per (f(x0, y0), y0):
z − f(x0, y0) = m2(y − y0)
con m2 ∈ R. Sommando membro a membro le due equazioni, otteniamo che
π : z = a1(x− x0) + a2(y − y0) + f(x0, y0)
con a1, a2 ∈ R. Il nostro obiettivo e determinare a1, a2 tali che π sia tangente a Gf .
Definiamo l’applicazione L : R2 −→ R, v = (v1, v2) ∈ R, L(v) + a1v1 + a2v2.
E immediato osservare che L e un’applicazione lineare, cioe, per definizione
17

1. CALCOLO IN PIU VARIABILI
(Lin1) L(v + w) = L(v) + L(w) ∀ v, w ∈ R2
(Lin2) L(λv) = λL(v) ∀λ ∈ R, ∀ v ∈ R2
Esercizio. Mostrare che L : Rn −→ R e lineare ⇐⇒ ∃ a = (a1, a2, . . . , an) ∈
R2 tale che L(v) = a • v def=
n∑
i=1
aivi.
Quindi, proseguendo nel nostro ragionamento, possiamo scrivere che
π : z = a1(x− x0) + a2(y − y0) + f(x0, y0) = L(P − P0) + f(x0, y0)
dove L e una (qualunque) applicazione lineare.
Inoltre, A e aperto, quindi ∃ δ0 > 0 tale che B(P0, δ0) ⊆ A. Questo ci consente di
dire che e ben definito il seguente “rapporto incrementale globale”, definito da
B(P0, δ0) \ {P0} 3 P 7−→f(P )− L(P − P0)− f(P0)
d(P, P0)
dove il numeratore e del tipo “Funzione”−“Piano Tangente”. A questo punto, e
naturale dare la seguente definizione.
Definizione 1.5.1. Siano A ⊆ R2 un insieme aperto, P0 ∈ A fissato, f : A −→ R. Si
dice che f e differenziabile nel punto P0 se esiste una applicazione lineare L : R2 −→ Rtale che
(D) ∃ limP→P0
f(P )− L(P − P0)− f(P0)
d(P, P0)=
= lim(x, y)→(0, 0)
f(x, y)− a1(x− x0)− a2(y − y0)− f(x0, y0)√(x− x0)2 − (y − y0)2
= 0
L’applicazione lineare L, se esiste, si chiama differenziale di f nel punto P0 e si
denota con
df(P0) ≡ L
Teorema 1.5.1. Sia A ⊆ R2 aperto, f : A −→ R, P0 ∈ A. Supponiamo che f sia
differenziabile nel punto P0. Allora
(i) ∃∇f(P0)def=
(∂f
∂x(P0),
∂f
∂y(P0)
)∈ R2
Inoltre,
18

1.5 Differenziale di una funzione
(?) df(P0)(v) = ∇f(P0) • v =∂f
∂x(P0)v1 +
∂f
∂y(P0)v2, ∀ v = (v1, v2) ∈ R2
Da (?) segue che df(P0), se esiste, e univocamente determinata.
(ii) f e continua in P0.
Dimostrazione:
(i) Sia e1 = (1, 0) il primo vettore della base canonica di R2. Scelgo dunque
P = P0 + he1 con |h| < δ0, cioe proseguo partendo da P0 lungo l’asse x
beccando P . Dalla (D), segue che
(1) ∃ limh→0
f(P0 + he1)− f(P0)− L(he1)
|h| = 0
⇐⇒ ∃ limh→0
f(P0 + he1)− f(P0)− hL(e1)
h= 0
⇐⇒ ∃ limh→0
f(P0 + he1)− f(P0)
h= L(e1) ∈ R
(2)def⇐⇒ ∃ ∂f
∂x(P0) = L(e1)
Analogamente, restringendosi ai punti del tipo P = P0 +he2, con e2 = (0, 1),
si prova che:
(3) ∃ ∂f∂y
(P0) = L(e2)
Da (2) + (3) segue che ∃∇f(P0).
D’altra parte, poiche (e1, e2) e una base, quindi possiamo scrivere che v =
e1v1 + e2v2 per appropriati v1, v2 ∈ R. Usando la linearita di L, otteniamo
che L(v) = L(e1)v1 + L(e2)v2, da cui segue (?).
(ii) Dobbiamo provare che
(1) ∃ limP→P0
f(P ) = f(P0)
m(2) ∃ lim
P→P0
(f(P )− f(P0)) = 0
19

1. CALCOLO IN PIU VARIABILI
Se P 6= P0, allora
f(P )− f(P0) =f(P )− f(P0)− df(P0)(P − P0)
d(P, P0)d(P, P0) + df(P0)(P − P0)
Per la (D), sappiamo che f(P )−f(P0)−df(P0)(P−P0)d(P, P0) −→
P→P0
0. D’altra parte, per
definizione, d(P, P0) −→P→P0
0. Resta da provare che df(P0)(P − P0) −→P→P0
0.
Esercizio (Esercizio 5 del Foglio 2). Sia L : Rn −→ R lineare, allora L e
continua su Rn.
Quindi, usando l’esercizio, df(P0)(P − P0) −→P→P0
df(P0)(0) = 0.
�
Definizione 1.5.2 (di piano tangente al grafico). Data f : A −→ R, con A insieme
aperto di R2 e P0 ∈ A, supponiamo che f sia differenziabile nel punto P0. Si chiama
piano tangente a Gf(2) nel punto (x0, y0, f(x0, y0)) il piano π di R3 di equazione
π : df(P0)(P − P0) + f(P0), ∀P = (x, y) ∈ R2
1.5.1 Estensione al caso dimensionale n ≥ 3
Siano A ⊆ Rn aperto, f : A −→ R, P 0 = (x01, . . . , x
0n) ∈ A fissato. Sia (e1, . . . , en) la
base canonica di Rn.
Essendo A aperto, ∃ δ0 > 0 tale che B(P 0, δ0) ⊆ A. E ben definito il rapporto
incrementale rispetto alla direzione i-esima
B(P0, δ0) \ {P 0} 3 h 7−→ f(P 0 + hei)− f(P 0)
h
Definizione 1.5.3. Siano A, f , P 0 e (e1, . . . , en) come sopra.
(i) f si dice derivabile (parzialmente) rispetto alla direzione xi nel punto P 0 se
∃ ∂f∂xi
(P 0) = limh→0
f(P 0 + hei)− f(P 0)
h∈ R
(2)Gf indica il grafico di f .
20

1.5 Differenziale di una funzione
(ii) Se ∃ ∂f∂xi
(P 0) ∀ i = 1, . . . , n si dice che esiste il vettore gradiente di f in P 0
e si denota con
∇f(P 0) =
(∂f
∂x1(P 0), . . . ,
∂f
∂xn(P 0)
)
(iii) f si dice differenziabile nel punto P 0 se esiste un’applicazione lineare L :
Rn → R per cui vale (D).
L’applicazione L si chiama differenziale di F in P 0 e si denota con df(P 0) :
Rn → R.
Si prova ancora che, se f e differenziabile in P 0, allora:
(i) ∃∇f(P 0)
(ii) df(P 0)(v) = ∇f(P 0) • v =
n∑
i=1
∂f
∂xi(P 0)vi, v = (v1, . . . , vn) ∈ Rn
Definizione 1.5.4. Si dice direzione o versore di Rn un vettore v ∈ Rn tale che
||v|| = 1.
Siano A ⊆ Rn aperto, f : A −→ R, P 0 = (x01, . . . , x
0n) ∈ A, v una direzione di Rn.
Essendo A aperto, ∃ δ0 > 0 tale che B(P0, δ0) ⊆ A. E ben definito il rapporto
incrementale rispetto alla direzione v
B(P0, δ0) \ {P0} 3 h 7−→f(P0 + hv)− f(P0)
h
Definizione 1.5.5 (derivata direzionale). Si dice che f e derivabile (parzialmente)
rispetto alla direzione v nel punto P0 se
∃ ∂f∂v
(P0) = limh→0
f(P0 + hv)− f(P0)
h∈ R
Proposizione 1.5.1. Siano A ⊆ Rn aperto, f : A −→ R, P0 ∈ A fissato. Supponiamo
che f sia differenziabile in P0. Allora, per ogni direzione v ∈ Rn,
∃ ∂f∂v
(P0) = ∇f(P0) • v = df(P0)(v)
Dimostrazione: Scegliamo P = P0 + hv. Dalla (D) segue che
limh→0
f(P0 + hv)−hL(v)
qL(hv)− f(P0)
|h| = 0 ⇐⇒ ∃ limh→0
f(P0 + hv)− f(P0)
h= L(v)
def⇐⇒
21

1. CALCOLO IN PIU VARIABILI
def⇐⇒ df(P0)(v) =∂f
∂v(P0)
Come nel caso bidimensionale, leggendo v sulla base canonica e usando la linearita di
L si verifica che
df(P0)(v) = ∇f(P0) • v
�
Osservazione 1.5.1 (n = 1). Siano A ⊂ R aperto e f : A −→ R.
f e differenziabile nel punto x0 ⇐⇒ f e derivabile nel punto x0
In altri termini, df(x0)(v) = f ′(x0)v.
1.5.2 Condizioni sufficienti per la differenziabilita
Abbiamo gia visto che, dati A ⊆ R aperto, f : A −→ R, P0 ∈ A fissato, se f e
differenziabile nel punto P0 allora f e continua nel punto P0.
Ma, viceversa, la continuita da sola non basta per garantire la differenziabilita!
Un caso banale (per n = 1 e A = R) e
f(x) = |x|
f e continua in x0 = 0, ma @ f ′(0).
Ottenere una caratterizzazione della differenziabilita, in effetti, e difficile. . . infatti
non c’e! Nessuno finora ci e riuscito. Diamo comunque il seguente teorema.
Teorema 1.5.2 (della differenziabilita o del differenziale totale). Siano A ⊆ Rn aperto,
P0 ∈ A fissato, f : A −→ R. Supponiamo che ∃ δ0 > 0 tale che
P0
x
y
δ0
A
x0
y0
22
1.5 Differenziale di una funzione
B(P0, δ0) ⊆ A e valgano:
(i) ∃ ∂f∂xi
: B(P0, δ0) −→ R, ∀ i = 1, 2, . . . , n
(ii)∂f
∂xi: B(P0, δ0) −→ R e continua nel punto P0, ∀ i = 1, 2, . . . , n
Allora f e differenziabile nel punto P0.
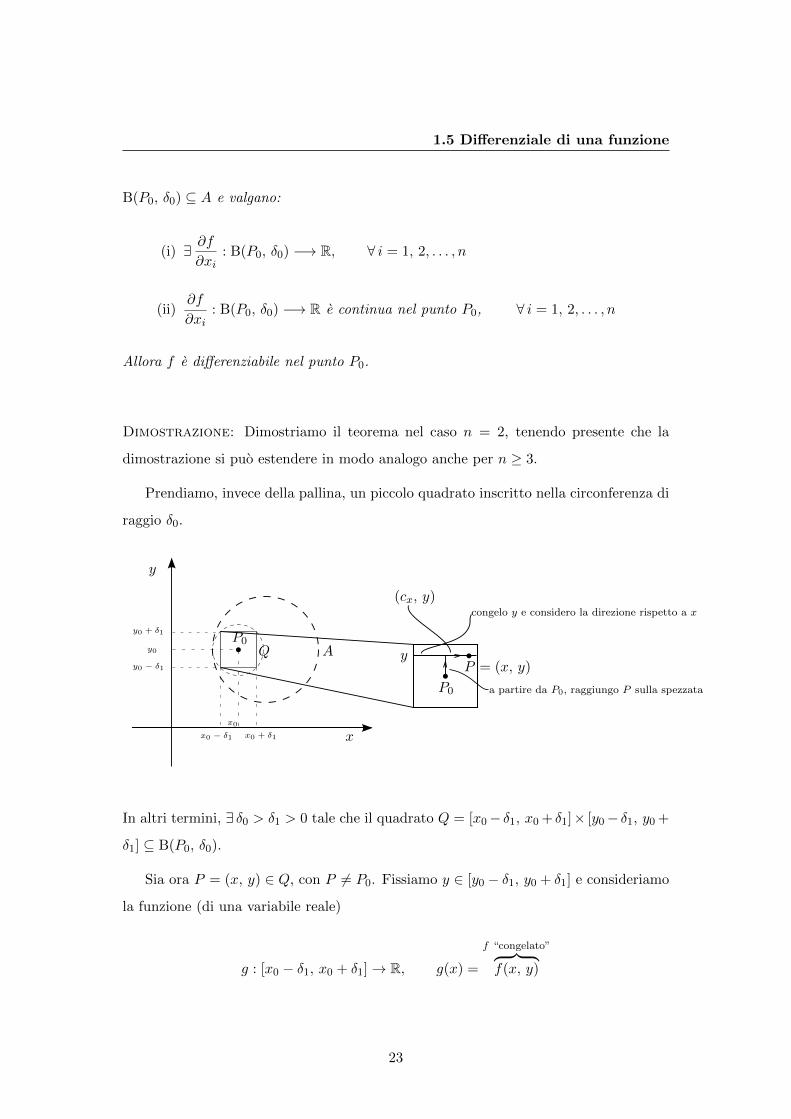
Dimostrazione: Dimostriamo il teorema nel caso n = 2, tenendo presente che la
dimostrazione si puo estendere in modo analogo anche per n ≥ 3.
Prendiamo, invece della pallina, un piccolo quadrato inscritto nella circonferenza di
raggio δ0.
P0A
x
y
x0 − δ1 x0 + δ1
x0
Qy0 − δ1
y0 + δ1
y0
P0
P = (x, y)
congelo y e considero la direzione rispetto a x
a partire da P0, raggiungo P sulla spezzata
(cx, y)
y
In altri termini, ∃ δ0 > δ1 > 0 tale che il quadrato Q = [x0− δ1, x0 + δ1]× [y0− δ1, y0 +
δ1] ⊆ B(P0, δ0).
Sia ora P = (x, y) ∈ Q, con P 6= P0. Fissiamo y ∈ [y0 − δ1, y0 + δ1] e consideriamo
la funzione (di una variabile reale)
g : [x0 − δ1, x0 + δ1]→ R, g(x) =
f “congelato”︷ ︸︸ ︷f(x, y)
23

1. CALCOLO IN PIU VARIABILI
Da (i) segue che g e derivabile su [x0−δ1, x0+δ1]. Possiamo quindi applicare il Teorema
del valor medio di Lagrange(3) a g su (x0, x), ottenendo che
g(x)− g(x0) = g′(cx)(x− x0)
per un opportuno cx compreso tra x0 e x.
In termini di f , possiamo rileggere l’uguaglianza come
(1) f(x, y)− f(x0, y) =∂f
∂x((cx, y))(x− x0) ∀P ∈ Q
Analogamente, consideriamo la funzione (di una variabile reale):
h : [y0 − δ1, y0 + δ1]→ R, h(y) = f(x0, y)
Di nuovo, otteniamo da (i) che la funzione h e derivabile in [y0 − δ1, y0 + δ1] e
possiamo applicare il Teorema del valor medio di Lagrange ottenendo che
h(y)− h(y0) = h′(cy)(y − y0)
per un opportuno cy compreso tra y0 e y.
In termini di f , possiamo rileggere l’uguaglianza come
(2) f(x0, y)− f(x0, y0) =∂f
∂y((x0, cy))(y − y0) ∀ y ∈ [y0 − δ1, y0 + δ1]
Proviamo ora che da (1)+(2) segue che f e differenziabile in P0 (utilizzando la (ii)),
cioe, per definizione, dobbiamo provare che
(D) ∃ limP→P0
f(P )− L(P − P0)− f(P0)
d(P, P0)=
∃ limP→P0
f(P )− df(P0)(P − P0)− f(P0)
d(P, P0)=
∃ limP→P0
f(P )−∇f(P0) • (P − P0)− f(P0)
d(P, P0)=
(3) [Gre] Sia f una funzione continua su un intervallo chiuso limitato [a, b] di ampiezza non nulla. Se
f ha derivata finita in (a, b), allora
∃ξ∈(a, b)
f(b)− f(a) = f ′(ξ)(b− a)
24

1.5 Differenziale di una funzione
∃ lim(x, y)→(x0, y0)
∣∣∣∣f(x, y)− ∂f
∂x(P0)(x− x0)− ∂f
∂y(P0)(y − y0)− f(x0, y0)
∣∣∣∣d(P, P0)
= 0
Osserviamo che da (1) e (2) segue che
∣∣∣∣(f(x, y)− f(x0, y)) + (f(x0, y)− f(x0, y0))− ∂f
∂x(P0)(x− x0)− ∂f
∂y(P0)(y − y0)
∣∣∣∣d(P, P0)
=
∣∣∣∣∣∣∣∣∣
+ϕ1(x, y)︷ ︸︸ ︷(∂f
∂x(cx, y)− ∂f
∂x(P0)
)(x− x0) +
+ϕ2(x, y)︷ ︸︸ ︷(∂f
∂y(x0, cy)−
∂f
∂y(P0)
)(y − y0)
∣∣∣∣∣∣∣∣∣d(P, P0)
∀P∈Q\{P0}≤
|ϕ1(x, y)|
(4)
︷ ︸︸ ︷( |x− x0|d(P, P0)
)+ |ϕ2(x, y)|
( |y − y0|d(P, P0)
)≤ |ϕ1(x, y)|+ |ϕ2(x, y)|
Osserviamo poi che ϕ1 e ϕ2 vanno a 0 usando la (ii).
Siamo quindi arrivati alla conclusione che
(3) 0 ≤
∣∣∣∣f(x, y)− f(x0, y0)− ∂f
∂x(P0)(x− x0)− ∂f
∂y(P0)(y − y0)
∣∣∣∣d(P, P0)
≤
|ϕ1(x, y)|+ |ϕ2(x, y)| (ii)−→P→0
0 ∀P ∈ Q \ {P0}
Dalla (3) e dalla (ii), applicando il Teorema dei Carabinieri, segue (D).
�
Osservazione 1.5.2. Il Teorema del differenziale totale e una condizione sufficiente,
ma non necessaria, per la differenziabilita. Per esempio, si provi che, data
f(x) =
x2sin
(1
x
)x 6= 0
0 x = 0
∃ f ′(x) per x 6= 0, ∃ f ′(0) = 0, ma @ limx→0
f ′(x).
(4)≤ 1 per il Teorema di Pitagora (i cateti sono sempre minori dell’ipotenusa!)
25

1. CALCOLO IN PIU VARIABILI
Definizione 1.5.6. Dato A ⊆ Rn,
(i) si denota con C0(A) l’insieme delle funzioni f : A −→ R continue in ogni
punto di A;
(ii) se A e aperto, si denota con C1(A) l’insieme delle funzioni f ∈ C0(A) e tali
che∂f
∂xi∈ C0(A), ∀ i = 1, 2, . . . , n.
Corollario 1.5.1. Se f ∈ C1(A), allora f e differenziabile in ogni punto di A.
Osservazione 1.5.3. Gli spazi Cm(A) (m = 0, 1) sono spazi vettoriali su R. Infatti, la
somma di funzioni continue e continua, cosı come il prodotto di una funzione continua
per scalari.
Tuttavia, questi spazi hanno dimensione infinita! Non possiamo piu lavorare come
sugli spazi a dimensione finita. In particolare, crolla il Teorema di Bolzano-Weierstrass.
1.5.3 Derivate (parziali) successive
(n = 2)
Siano A ⊆ R2, f : A −→ R e supponiamo che ∃ ∂f∂x,∂f
∂y: A −→ R. Sia ora P0 ∈ A
fissato. Se
derivate seconde pure︷ ︸︸ ︷∃ ∂
∂x
(∂f
∂x
)(P0)
def=
∂2f
∂x2(P0), ∃ ∂
∂y
(∂f
∂y
)(P0)
def=
∂2f
∂y2(P0)
derivate seconde miste︷ ︸︸ ︷∃ ∂
∂y
(∂f
∂x
)(P0)
def=
∂2f
∂y∂x(P0), ∃ ∂
∂x
(∂f
∂y
)(P0)
def=
∂2f
∂x∂y(P0)
Problema: Se ∃ ∂2f
∂y∂x(P0) e ∃ ∂2f
∂x∂y(P0), vale che
∂2f
∂y∂x(P0) =
∂2f
∂x∂y(P0)?
Osservazione 1.5.4. In generale, puo accadere che
(?) ∃ ∂2f
∂y∂x(P0) 6= ∃ ∂2f
∂x∂y(P0)
Ad esempio (Ex. 11 Foglio 2), si prenda
f : R2 −→ R, f(x, y) =
2xy(x2 − y2)
x2 + y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
Si provi che vale (?) nel punto P0 = (0, 0)
26

1.5 Differenziale di una funzione
Teorema 1.5.3. Siano A ⊂ R2 aperto, f : A −→ R, P0 ∈ A. Supponiamo che
(i) ∃ ∂2f
∂x∂y,∂2f
∂y∂x: A −→ R.
(ii)∂2f
∂x∂y,∂2f
∂y∂xsono continue nel punto P0.
Allora
∃ ∂2f
∂y∂x(P0) = ∃ ∂2f
∂x∂y(P0)
Dimostrazione: (Si veda [Giu]).
�
Osserviamo che il caso si estende (banalmente) anche al caso n ≥ 3.
Definizione 1.5.7. Sia A ⊆ Rn aperto. Fissato un intero m ≥ 1, si denota con
Cm(A) l’insieme delle funzioni f : A −→ R tali che f e continua e, comunque fissato
1 ≤ k ≤ m,
∃ ∂kf
∂xi1 · . . . · ∂xik: A −→ R continua ∀ i1, . . . , ik ∈ {1, . . . , n}
Osservazione 1.5.5 (importante). Data f ∈ Cm(A), dato 1 ≤ k ≤ m, e data
∂kf
∂xi1 · . . . · ∂xik(x)
Teorema di Schwarz=
∂kf
∂xα11 · . . . · ∂xαnn
(x)
dove αi ∈ N (eventualmente non nulli), con α1 + . . .+ αn = k.
Definizione 1.5.8. Siano A ⊆ Rn aperto, N 3 m ≥ 0. Allora, Cm(A) denota l’insieme
delle funzioni f : A −→ R per cui ∃Dαf : A −→ R continua ∀α = (α1, . . . , αn) ∈Nn, |α| + α1 + . . .+ αn ≤ m, dove
Dαf(x)def=
∂kf
∂xα11 · . . . · ∂xαnn
(x), x ∈ A
27

1. CALCOLO IN PIU VARIABILI
1.6 Regola di derivazione composta (RDC)
1.6.1 Regola di composizione di una funzione composta
Vediamo un caso particolare.
Siano g : [a, b] −→ R2, g(t) = (x(t), y(t)) derivabile ∀ t, cioe ∃x′(t), y′(t) ∀ t ∈[a, b], ed f : R2 −→ R, f ∈ C1(R2).
Consideriamo la funzione h = f ◦ g : [a, b] −→ R.
Problema: ∃h′(t) ???= ∇f(g(t)) • g′(t)
Definizione 1.6.1. Sia chiama curva in Rn una funzione g : [a, b] ⊆ R −→ Rn.
Γ = g([a, b]) si chiama supporto della curva.
Proposizione 1.6.1. Sia g : [a, b] −→ Rn derivabile nel punto t0 ∈ [a, b], cioe, se
g(t) = (x1(t), . . . , xn(t)) ∃ g′(t0) = (x′1(t0), . . . , x′n(t0)) ∈ Rn.
Sia A ⊆ Rn aperto e sia f : A −→ R con f ∈ C1(A) (in effetti, basterebbe che f
fosse differenziabile nel punto P0 = g(t0)).
Supponiamo inoltre che Γ = g([a, b]) ⊆ A.
Allora la funzione composta h = f ◦ g : [a, b] −→ R e derivabile nel punto t0 e
h′(t) = ∇f(g(t0)) • g′(t0)
Dimostrazione: Sia t0 ∈ (a, b). Per definizione, h(t) + f(g(t)), t ∈ [a, b]. Conside-
riamo, se t ∈ [a, b] \ {t0}, il rapporto:
(1)h(t)− h(t0)
t− t0=f(g(t))− f(g(t0))
t− t0
Per ipotesi, f e differenziabile nel punto P0 + g(t0), per cui possiamo scrivere
(2) f(P ) = f(P0) + df(P0)(P − P0) + σ(P ), ∀P ∈ A
dove
(3) limP→P0
σ(P )
||P − P0||= 0
28

1.6 Regola di derivazione composta (RDC)
Quindi, prendendo P = g(t), otteniamo:
(1)(2)=df(P0)(g(t)− g(t0)) + σ(g(t))
t− t0=∇f(P0) • (g(t)− g(t0)) + σ(g(t))
t− t0=
= ∇f(P0) • (g(t)− g(t0))
t− t0+σ(g(t))
t− t0
Se mostriamo che, passando a limite, il secondo addendo di questa somma va a 0,
completiamo la dimostrazione. Pertanto, definiamo la funzione
σ∗(P ) =
σ(P )
||P − P0||P 6= P0
0 P = P0
che e continua per la (3). Ricordando che P = g(t), P0 = g(t0) e che poiche g e
derivabile e anche continua, consentendoci di passare dal limite per t→ t0 a quello per
P → P0, possiamo scrivere che
limt→t0
σ(g(t))
t− t0= lim
t→t0σ∗(g(t))
||P − P0||t− t0
= 0
A questo punto, otteniamo che
limt→t0∇f(P0) • (g(t)− g(t0))
t− t0+σ(g(t))
t− t0= ∇f(g(t0)) • g′(t0)
�
Una prima applicazione della regola di derivazione di una funzione composta e il
seguente teorema.
Teorema 1.6.1 (del valor medio). Sia A ⊆ R2aperto e sia f ∈ C1(A). Supponiamo che
A sia convesso, cioe, per definizione, per ogni coppia di punti P1, P2 ∈ A, il segmento
P1P2 + {tP1 + (1− t)P2 : 0 ≤ t ≤ 1} ⊂ A
29

1. CALCOLO IN PIU VARIABILI
P1
x
y
P2 ≡ A
P ∗ = g(t∗)
0 1t∗g
Allora, ∀P1, P2 ∈ A, f(P2)− f(P1) = ∇f(P ∗)(P2 − P1) per un opportuno punto
P ∗ ∈ P1P2.
Dimostrazione: Definiamo la curva g : [0, 1]→ R2 tale che
g(t) = tP2 + (1− t)P1 = P1 + t(P2 − P1), 0 ≤ t ≤ 1
Abbiamo che g e derivabile su [0, 1] e
g′(t) = P2 − P1 ∀ t ∈ [0, 1]
Consideriamo la funzione composta
h = f ◦ g : [0, 1]→ R tale che h(t) = f(g(t))
Per la proposizione precedente, h e derivabile su [0, 1] e
h′(t) = ∇f(g(t)) • g′(t) = ∇f(g(t)) • (P2 − P1) ∀ t ∈ [0, 1]
Applichiamo il Teorema del valor medio di Lagrange in una variabile alla funzione h
ottenendo:
h(1)− h(0) = h′(t∗)(1− 0) = h′(t∗)
per un opportuno 0 ≤ t∗ ≤ 1. Rileggendo in termini di f e di g, possiamo scrivere (ricor-
dando che g(t∗) = P ∗ e che g(1) = P2, g(0) = P1 =⇒ h(1) = f(P2), h(0) =
f(P1)):
f(P2)− f(P1) = ∇f(P ∗) • (P2 − P1)
30

1.6 Regola di derivazione composta (RDC)
�
Corollario 1.6.1. Sia A ⊆ R2 aperto e convesso, e sia f ∈ C1(A). Supponiamo che
∇f(P ) = 0 = (0, . . . , 0) ∀P ∈ A.
Allora, fissato un P0 ∈ A, f(P ) = f(P0) ∀P ∈ A.
Dimostrazione: Fissiamo P0 ∈ A. Preso P ∈ A, per il teorema del valor medio
∃P ∗ ∈ P0P tale che
f(P )− f(P0) = ∇f(P ∗) • (P − P0)
Ma ∇f(P ) = 0 ∀P per ipotesi, quindi sara nullo anche in P ∗. L’uguaglianza prece-
dente diventa percio
f(P )− f(P0) = 0 =⇒ f(P ) = f(P0)
�
Definizione 1.6.2. Sia A ⊆ Rn aperto.
(i) A si dice sconnesso se esistono due insiemi B, C aperti, disgiunti e non vuoti
tali che A = B t C.
(ii) A si dice connesso se non e sconnesso.
Corollario 1.6.2. Sia A ⊆ R2 aperto e connesso, e sia f ∈ C1(A). Supponiamo che
∇f(P ) = 0 = (0, . . . , 0) ∀P ∈ A.
Allora, fissato un P0 ∈ A, f(P ) = f(P0) ∀P ∈ A.
Dimostrazione: (Si veda [Giu]).
�
Esercizio. Sia A ⊆ Rn aperto e convesso. Provare che A e anche connesso (utilizzando
la definizione di connessione).
31

1. CALCOLO IN PIU VARIABILI
Dimostrazione: (Idea)
La dimostrazione procede per assurdo. Supponiamo che A = BtC, con B, C aperti,
disgiunti e non vuoti. Se A e convesso, c’e l’assurdo che devo “bucare” l’interfaccia che
crea l’unione disgiunta per poter unire un punto di B e un punto di C, ossia per unire
due particolari punti di A!
≡ A
C
B
P1P2
buco nell’ “interfaccia”
Tuttavia, l’idea intuitiva di dover “bucare” l’interfaccia non basta. Chi mi assicura
che devo bucarla?
Per rispondere, bisogna far uso dell’Assioma di Completezza. Infatti, in Q tale
interfaccia non si bucherebbe.
�
Problema: Siano g : Rn −→ Rm, f : Rm −→ Rk di “classe C1”. Definendo
h = f ◦ g : Rn −→ Rk, ∃∇h(x1, . . . , xn)?
1.6.2 Funzioni continue e differenziabili da Rn a Rm
Ricordiamo innanzitutto che (Rn, || · ||n) e (Rm, || · ||m) sono due spazi metrici (e in
particolare due spazi topologici). Inoltre, Rn e Rm possiedono una struttura di spazio
vettoriale lineare su R.
Definizione 1.6.3. Siano A ⊆ Rn, f : A −→ Rm, P0 ∈ A fissato.
(i) Se P0 e di accumulazione, allora f si dice continua nel punto P0 se
∃ limP→P0
||f(P )− f(P0)||m = 0
Una funzione f si dice continua sull’insieme A se f e continua in ogni punto
P0 ∈ A.
32

1.6 Regola di derivazione composta (RDC)
(ii) Supponiamo che A ⊆ Rn. Si dice che f e differenziabile nel punto P0 se esiste
un’applicazione lineare L = df(P0) : Rn −→ Rm tale che valga
(D) limP→P0
||f(P )− f(P0)− L(P − P0)||m||P − P0||n
= 0
Si dice che f e differenziabile sull’insieme A se f e differenziabile in ogni
punto P0 ∈ A.
Supponiamo ora di fissare la base canonica di Rm (e1, . . . , em). Allora, data f :
Rn ⊇ A −→ Rm, quest’ultima si puo rappresentare come
f(P )∈
Rm
= f1(P )∈
R
e1 + f2(P )e2 + . . .+ fm(P )em ≡ (f1(P ), . . . , fm(P ))
dove fi : A −→ R (i = 1, . . . ,m).
Proposizione 1.6.2. Sia A ⊆ Rn, f : A −→ Rm, f = (f1, . . . , fm). Allora f e
continua in ogni punto P0 ⇐⇒ fi : A −→ R e continua nel punto P0 per ogni
i = (1, . . . ,m).
Dimostrazione: Ricordiamo innanzitutto che (Ex. 1, Foglio 3), per ogni vettore
v ∈ Rm, vale
(?)1√m
m∑
i=1
|vi| ≤ ||v||m ≤m∑
i=1
|vi|
Da (?) segue che, prendendo v = f(P )− f(P0),
1√m
m∑
i=1
|fi(P )− fi(P0)| ≤ ||f(P )− f(P0)||m ≤m∑
i=1
|fi(P )− fi(P0)|
Ora, se un vettore va a 0, ciascuna componente va a 0, e viceversa. Quindi, usando
opportunamente in base al verso da dimostrare la prima o la seconda disuguaglianza,
segue banalmente la tesi (applicando la definizione di continuita!).
�
Ricordiamo che, data L : Rn −→ Rm lineare, possiamo rappresentarla come
L(v) = (L1(v), . . . , Lm(v)), ∀ v ∈ Rn
dove Li : Rn −→ R e lineare ∀ i = 1, . . . ,m.
33

1. CALCOLO IN PIU VARIABILI
Proposizione 1.6.3. Sia A ⊆ Rn aperto, f : A −→ Rm, f = (f1, . . . , fm). Allora
f e differenziabile in un punto P0 ⇐⇒ fi : A −→ R e differenziabile nel punto
P0 ∀ i = 1, . . . ,m.
Inoltre:
(1) df(P0)(v) =(df1(P0)(v), df2(P0)(v), . . . , dfm(P0)(v)
)T, ∀ v ∈ Rn
Dimostrazione: Dalla (?) della proposizione precedente segue che:
1√m
m∑
i=1
|fi(P )− fi(P0)− Li(P − P0)|||P − P0||n
≤ ||f(P )− f(P0)− L(P − P0)||m||P − P0||n
≤
≤m∑
i=1
|fi(P )− fi(P0)− Li(P − P0)|||P − P0||n
(⇐)
∀ i = 1, . . . ,m
∃ limP→P0
|fi(P )− fi(P0)− Li(P − P0)|||P − P0||n
= 0 =⇒
=⇒ f e differenziabile nel punto P0 e dfi(P0) = Li, ∀ i = 1, . . . ,m.
(⇒)
Allo stesso modo, procedendo al contrario.
�
Corollario 1.6.3. Sia A ⊆ Rn aperto, P0 ∈ A fissato, f : A −→ Rm. Supponiamo
inoltre che f sia differenziabile nel punto P0. Allora
(i) ∃ ∂fi∂xj
(P0) ∀ i = 1, . . . ,m, ∀ j = 1, . . . , n
(ii) df(P0)(v) =(J(f)
)(P0) · v, con v = (v1, . . . , vn)T un vettore colonna,
J(f)(P0) = [Jij ]m×n dove Jij =∂fi∂xj
(P0)
e J(f)(P0) si chiama matrice jacobiana di f nel punto P0.
Dimostrazione: Dalla proposizione precedente, segue che fi e dfferenziabile e
34
1.6 Regola di derivazione composta (RDC)
(2) dfi(P0)(v) = ∇fi(P0) • v, ∀ v ∈ Rn
In particolare, dalla (2) segue la (i): fissato i, esistono le derivate parziali per ogni j.
D’altra parte, da (1) + (2) segue che
J(f)(P0) =
∇f1(P0)∇f2(P0)
...∇fm(P0)
(5)
e
df(P0)(v) = J(f)(P0) · v, ∀ v ∈ Rn
�
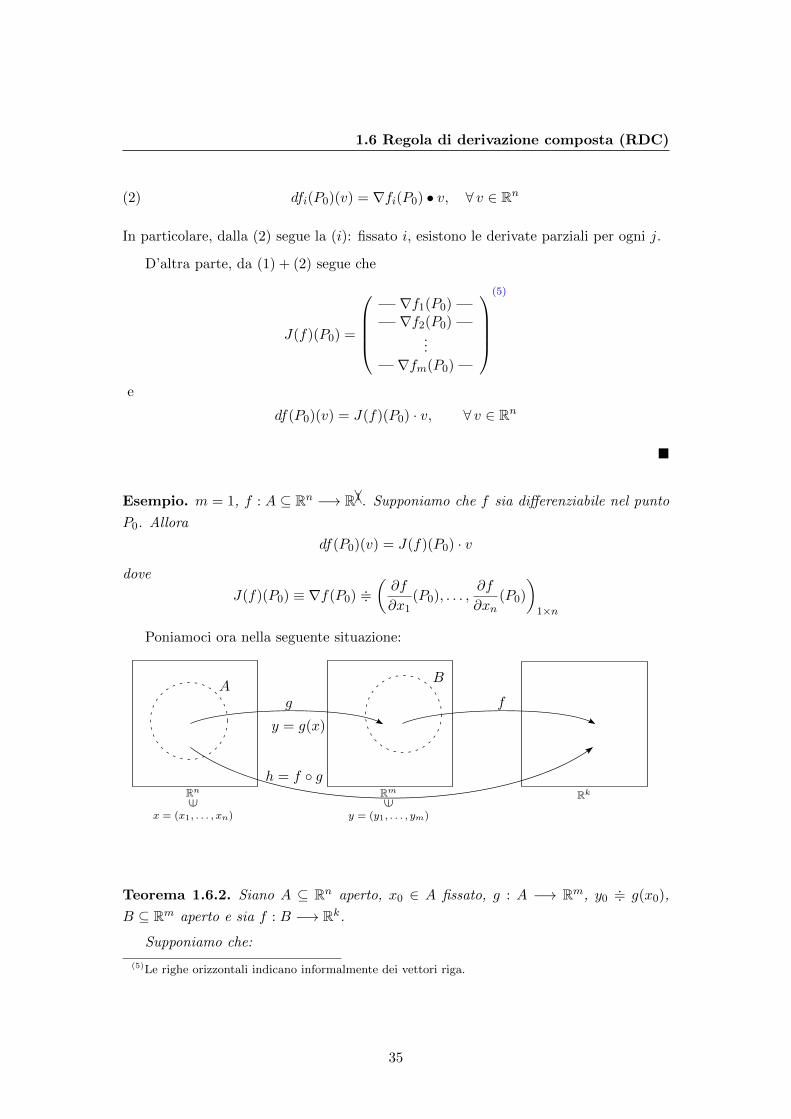
Esempio. m = 1, f : A ⊆ Rn −→ R�A1. Supponiamo che f sia differenziabile nel punto
P0. Allora
df(P0)(v) = J(f)(P0) · v
dove
J(f)(P0) ≡ ∇f(P0) +(∂f
∂x1(P0), . . . ,
∂f
∂xn(P0)
)
1×n
Poniamoci ora nella seguente situazione:
Rn
∈
x = (x1, . . . , xn)
Rm
∈
y = (y1, . . . , ym)
Rk
AB
g f
y = g(x)
h = f ◦ g
Teorema 1.6.2. Siano A ⊆ Rn aperto, x0 ∈ A fissato, g : A −→ Rm, y0 + g(x0),
B ⊆ Rm aperto e sia f : B −→ Rk.
Supponiamo che:
(5)Le righe orizzontali indicano informalmente dei vettori riga.
35

1. CALCOLO IN PIU VARIABILI
(i) g(A) ⊆ B
(ii) g sia differenziabile nel punto x0
(iii) f sia differenziabile nel punto y0 = g(x0)
Allora l’applicazione composta h = f ◦ g : A −→ Rk e differenziabile nel punto x0 e
(RDC)rispetto ai differenziali
dh(x0) = df(g(x0)) ◦ dg(x0)
Osservazione 1.6.1 (importante). Operativamente, risulterebbe piu semplice avere la
RDC rispetto alle jacobiane. Tale formula si puo in effetti ottenere, e risulta:
(RDC)rispetto alle jacobiane
J(h)(x0)︸ ︷︷ ︸k×n
= J(f)(g(x0))︸ ︷︷ ︸k×�m
· J(g)(x0)︸ ︷︷ ︸�m×n
se h = h(x) = (h1(x), . . . , hk(x)), y = g(x), f = f(y). Quindi,
∂hi∂xj
(x0) =
m∑
h=1
∂fi∂yh
(g(x0)) · ∂gh∂xj
(x0), ∀ i = 1, . . . , kj = 1, . . . , n
Esempio (Applicazione importante: derivazione in coordinate polari (nel piano)). Sia
g : (0, +∞)× (0, 2π) −→ R2 tale che:
g(ρ, ϑ) = (ρ cos(ϑ), ρ sin(ϑ))
Consideriamo l’applicazione composta
u(ρ, ϑ) = (f ◦ g)((ρ, ϑ)) = f (ρ cos(ϑ), ρ sin(ϑ))
Problema:∂u
∂ρ=??
∂u
∂ϑ=??
Diamo ora la dimostrazione della RDC.
Dimostrazione: (RDC rispetto ai differenziali)
Dobbiamo provare che, definita la funzione lineare L : Rn −→ Rk tale che
L(v) =(df(g(x0)) ◦ dg(x0)
)(v) =
(df(g(x0))
)(dg(x0)(v)
)=
= df(y0)(dg(x0)(v)), v ∈ Rn
vale:
36

1.6 Regola di derivazione composta (RDC)
(D) ∃ limP→P0
||h(P )− h(P0)− L(P − P0)||k||P − P0||n
= 0
Osserviamo che, da (ii) e (iii), segue che:
(1) g(x) = g(x0) + dg(x0)(x− x0) + σ(x), ∀x ∈ A
(2) f(y) = f(y0) + df(y0)(y − y0) + ρ(y), ∀ y ∈ B
con σ : A −→ Rm e ρ : B −→ Rk verificanti:
(3) limx→x0
||σ(x)||m||x− x0||n
= 0
(4) limy→y0
||ρ(y)||k||y − y0||m
= 0
Volendo riscrivere (D) in termini di f e g, osserviamo che:
(5) h(x)− h(x0) =
f(g(x))− f(g(x0))(y = g(x), y0 = g(x0)) + (2)
=
df(y0)(g(x)− g(x0)) + ρ(g(x))(1)=
df(y0)(dg(x0)(x− x0) + σ(x)
)+ ρ(g(x))
il differenzialee lineare!
=
df(y0)(dg(x0)(x− x0)
)
︸ ︷︷ ︸L(x−x0)
+df(y0)(σ(x)) + ρ(g(x)) =
L(x− x0) +
τ(x)︷ ︸︸ ︷df(y0)(σ(x)) + ρ(g(x))
Dalla (5) segue che per provare (D), basta mostrare che:
(6) ∃ limx→x0
||τ(x)||k||x− x0||n
= 0 (P ≡ x, P0 ≡ x0)
Osserviamo che:
||τ(x)||k||x− x0||n
≤ ||df(y0)(σ(x))||k||x− x0||n
+||ρ(g(x))||k||x− x0||n
∀x ∈ A \ {x0}
e:||df(y0)(σ(x))||k||x− x0||n
linearita!=
∣∣∣∣∣∣∣∣df(y0)
(σ(x)
||x− x0||n
)∣∣∣∣∣∣∣∣k
Ma il differenziale e un’applicazione lineare! Quindi il suo valore su un vettore e sempre
scrivibile come una certa matrice (per la precisione, la jacobiana) per il vettore stesso.
Inoltre (Ex. 2, Foglio 3), se A = (aij)m×n e v ∈ Rn, vale:
37

1. CALCOLO IN PIU VARIABILI
(?) ||Av||Rm ≤ ||A|| · ||v||n
dove ||A|| def=
√√√√m∑
i=1
n∑
j=1
a2ij . Da (3) + (?) abbiamo quindi che
∣∣∣∣∣∣∣∣df(y0)
(σ(x)
||x− x0||n
)∣∣∣∣∣∣∣∣k
=
∣∣∣∣∣∣∣∣J(f)(y0) ·
(σ(x)
||x− x0||n
)∣∣∣∣∣∣∣∣k
≤ ||J(f)(y0)k×m||·||σ(x)||m||x− x0||n
−→x→x0
0
Per concludere e provare la (6), basta ora mostrare che:
(7) ∃ limx→x0
||ρ(g(x))||k||x− x0||n
= 0
Definiamo:
ρ∗ : B −→ Rk, ρ∗(y) +
ρ(y)
||y − y0||my 6= y0
0Rk y = y0
Da (4), segue che ∃ limy→y0
||ρ∗(y)||k = 0. Osserviamo ora che
(8)||ρ(g(x))||k||x− x0||n
= ||ρ∗(g(x))||k ·||g(x)− g(x0)||m||x− x0||n
∀x ∈ A \ {x0}
e
||ρ∗(g(x))|| −→x→x0
0
Per quanto riguarda il secondo fattore, usando la differenziabilita di g in x0 e facile
osservare che (Ex. 3, Foglio 3) ∃ c > 0, R0 > 0 tale che:
(9)||g(x)− g(x0)||m||x− x0||n
≤ c ∀x ∈ Bn(x0, R0) \ {x0}
Da (8) + (9), segue la (6).
�
1.7 Formula di Taylor
Problema: Sia f ∈ Cm(B(x0, r0)), dove x0 = (x01, . . . , x
0n) ∈ Rn, r0 > 0, m ∈ N≥1.
Come si fa ad “approssimare f” con un polinomio p = p(x1, . . . , xn) nel modo “migliore
possibile”?
Ricordiamo a tal proposito la formula di Taylor per n = 1, prendendo x0 ∈ R e di
conseguenza B(x0, r0) = (x0 − r0, x0 + r0).
38

1.7 Formula di Taylor
Teorema 1.7.1 (Formula di Taylor con resto secondo Lagrange (n = 1)). Sia f ∈Cm+1((x0 − r0, x
0 + r0)). Definiamo
Pm(f, x0)(x) =m∑
h=0
f (h)(x0)
h!(x− x0)h (x ∈ R)
Tale Pm e detto polinomio m-esimo di Taylor di f . Allora:
(FTm) f(x) = Pm(f, x0)(x) +Rm(x, x0)
con
(RLm)(6) Rm(x, x0) =f (m+1)(x)
(m+ 1)!(x− x0)m+1
dove x e un punto opportuno tra x0 e x. In particolare, vale che
(RPm)(7) ∃ limx→x0
Rm(x, x0)
|x− x0|m = 0
Ritorniamo ora al caso in n variabili, e prendiamo una funzione f ∈ Cm(B(x0, r0))
(ossia f : B(x0, r0) → R). Ricordiamo che, se α = (α1, . . . , αn) ∈ Nn, allora |α| +α1 + . . .+ αn. Nel caso |α| ≤ m, possiamo definire
Dαf(x) =∂|α|f
∂xα11 · . . . · ∂xαnn
(x) ∀x ∈ B(x0, r0)
Definiamo poi
α!def= α1! · α2! · . . . · αn!
e
(x− x0)αdef= (x1 − x0
1)α1 · (x2 − x02)α2 · . . . · (xn − x0
n)αn
se x = (x1, . . . , xn) e x0 = (x01, . . . , x
0n).
Vale allora il seguente teorema.
Teorema 1.7.2 (Formula di Taylor). Sia f ∈ Cm+1(B(x0, r0)). Definiamo
Pm(f, x0)(x) =
m∑
α ∈ Nn|α|≤m
Dαf(x0)
α!(x− x0)α (x ∈ Rn)
Tale Pm e detto polinomio m-esimo di Taylor di f . Allora:
(6)Resto secondo Lagrange(7)Resto secondo Peano
39

1. CALCOLO IN PIU VARIABILI
(FTm) f(x) = Pm(f, x0)(x) +Rm(x, x0) ∀x ∈ B(x0, r0)
con
(RLm) Rm(x, x0) =∑
α ∈ Nn|α|=m+1
Dαf(x)
α!(x− x0)α
dove x e un punto opportuno nel segmento x0x + {tx + (1 − t)x0 : 0 ≤ t ≤ 1}. In
particolare, vale che
(RPm) ∃ limx→x0
Rm(x, x0)
||x− x0||mn= 0
Osservazione 1.7.1. Supponiamo che valga (RLm) per f e proviamo che vale (RPm).
|Rm(x, x0)| ≤
≤∑
|α|=m+1
|Dαf(x)|α!
|(x− x0)α| =
=∑
|α|=m+1
|Dαf(x)|α!
|x1 − x01|α1 . . . |xn − x0
n|αn ≤
(8)
≤∑
|α|=m+1
|Dαf(x)|α!
||x− x0||α1n . . . ||x− x0||αnn =
(9)
=∑
|α|=m+1
|Dαf(x)|α!
||x− x0|||α|n =
= ||x− x0||m+1n F (x)
dove F (x) =∑
|α|=m+1
|Dαf(x)|α!
, x ∈ B(x0, r0)
m
|Rm(x, x0)|||x− x0||mn
≤ ||x− x0||nF (x)
(8)In un triangolo rettangolo ogni cateto e sempre minore dell’ipotenusa!(9)|α| = α1 + . . .+ αn
40

1.7 Formula di Taylor
Ora, passando a limite, ||x− x0||n va a 0, ma cosa accade a F (x)? Poiche le derivate
di f sono continue fino a m + 1, la funzione F e continua, ed e quindi facile provare
che e limitata. In particolare, vale che
limx→x0
F (x) =∑
|α|=m+1
|Dαf(x0)|α!
Infatti, prendendo x = tx+ (1− t)x0 per un certo 0 ≤ t ≤ 1, vale:
limx→x0
F (x) =
= limx→x0
∑
|α|=m+1
|Dαf(x)|α!
= limx→x0
∑
|α|=m+1
|Dαf(tx+ (1− t)x0)|α!
=∑
|α|=m+1
|Dαf(x0)|α!
dove nell’ultimo passaggio si e usata la continuita delle derivate successive, portando il
limite dentro l’argomento della funzione.
Dimostrazione: (Formula di Taylor, n = 2)
Fissiamo x = (x1, x2) ∈ B(x0, r0) e x0 = (x01, x
02). Sia F : [−1, 1] → R, F (t) +
f(x0 + t(x− x0)). In particolare, dalla regola di derivazione di una funzione composta,
F ∈ Cm+1([−1, 1]).
(Idea della dimostrazione: F (1) = f(x))
Applichiamo a F la formula di Taylor (per una variabile) con punto iniziale t0 = 0:
(1) F (t) =m∑
k=0
F (k)(0)
k!tk +Rm(t, 0) ∀t ∈ [−1, 1]
dove
Rm(t, 0) =F (m+1)(t)
(m+ 1)!tm+1
Calcoliamo le derivate F (k)(t) in termini di Dαf , tenendo conto che F = f ◦ g dove
g(t) = x0 + t(x− x0), e quindi F ′(t) = ∇f(g(t)) • g′(t).
k = 0: F 0(t) = f(x0 + t(x− x0))
k = 1: F ′(t) = ∇f(x0 + t(x− x0)) • (x− x0) =
2∑
j=1
∂f
∂xj(x0 + t(x− x0))(xj − x0
j )
41

1. CALCOLO IN PIU VARIABILI
k = 2: Come prima, consideriamo ogni addendo F ′j di F ′ una funzione F ′j = (xj −x0j )∂f
∂xj◦ g. Di conseguenza:
F ′′(t) =2∑
j=1
((xj − x0
j )∇(∂f
∂xj(x0 + t(x− x0))
))• (x− x0) =
=
2∑
j=1
(xj − x0j )
(2∑
i=1
∂2f
∂xi∂xj(x0 + t(x− x0))(xi − x0
i )
)=
=2∑
i=1, j=1
∂2f
∂xi∂xj(x0 + t(x− x0))(xj − x0
j )(xi − x0i )
k: (2)
F (k)(t) =
2∑
i1=1,...,ik=1
∂kf
∂xi1 . . . ∂xik(x0 + t(x− x0))(xi1 − x0
i1) . . . (xik − x0ik
)
∀t ∈ [−1, 1]
Fissiamo un multi-indice α = (α1, α2) tale che |α| = α1 +α2 = k con 0 ≤ k ≤ m+1,
e determiniamo il numero di volte che
(3) Dαf(x0 + t(x− x0)) =∂kf
∂xi1 . . . ∂xik(x0 + t(x− x0))
per una opportuna funzione i : {1, . . . , k} −→ {1, 2} quando ijdef= i(j).
Tenendo presente il teorema di inversione dell’ordine delle derivate parziali, vale (3)
se e solo se:
(4)
{ij = 1 per un numero di volte α1
ij = 2 per un numero di volte α2
(dove ricordiamo che j ∈ {1, k}).Andando a contare il numero di volte che si verifica (3), si prova per induzione
(esercizio) che tale numero e pari ak!
α1!α2!. Utilizzando questo risultato insieme a
(2) + (3) + (4), segue che
F (k)(t) =
=
2∑
i1=1,...,ik=1
∂kf
∂xi1 . . . ∂xik(x0 + t(x− x0)) (x1 − x0
1)α1(x2 − x02)α2
︸ ︷︷ ︸≡(x−x0)α
=
=∑
|α|=k
k!
α1!α2!Dαf(x0 + t(x− x0))(x− x0)α
42

1.7 Formula di Taylor
Applichiamo ora la (1) con t = 1:
f(x) = F (1) =
=m∑
k=0
∑
|α|=k
Dαf(x0)
α!(x− x0)α +
∑
|α|=m+1
Dαf(x0 + t(x− x0))
α!(x− x0)α +
+ Pm(f, x0)(x) +Rm(x, x0)
�
Osservazione 1.7.2. Si puo provare che, se f ∈ Cm(B(x0, r0)), vale ancora (FTm)
per una opportuna funzione resto Rm(x, x0) : B(x0, r0)→ R tale che:
(RPm) ∃ limx→x0
Rm(x, x0)
||x− x0||mn= 0
Osservazione 1.7.3.
f(x) = o(g(x)) (x→ x0)
m
(1) ∃ limx→x0
g(x) = 0
(2) g(x) 6= 0 ∀x ∈ (x0 − r0, x0 + r0) \ {x0}
(3) limx→x0
f(x)
g(x)= 0
1.7.1 Applicazione al calcolo dei limiti
Esempio (i).
limx→0
sin(x)
x= 1
Dimostrazione: La formula di Taylor al II ordine per la funzione sin(x) e:
sin(x) = x− x3
6+R3(x, 0) dove R3(x, 0) =
f (h)(x)
h!xh = o(x3)
per un opportuno x tra 0 e x. Quindi:
sin(x)
x= 1− x2
6+ o(x2)
A questo punto, il limite diventa banale.
43

1. CALCOLO IN PIU VARIABILI
�
Esempio (ii).
limx→0
x− sin(x)
x3=
1
6
Dimostrazione: Se avessi sviluppato all’ordine I:
sin(x) = x+ o(x)
x− sin(x)
x3=o(x)
x3
???−→
A questo punto, mi devo fermare! Avrei quindi dovuto sviluppare di piu. Uno dei
vantaggi della notazione “o”, a differenza di quella delle equivalenze asintotiche, e
proprio il fatto che rende chiaro l’ordine fino al quale sviluppare.
�
1.7.2 Caso m = 2
Definizione 1.7.1. Sia f ∈ C2(A), A ⊆ Rn aperto. Si chiama matrice hessiana in un
punto x0 ∈ A fissato la matrice quadrata e simmetrica (per Schwarz) di ordine n:
H(f)(x0) =
(∂2f
∂xi∂xj
)
i, j=1,...,n
Ad esempio, nel caso n = 2,
H(f)(x0) =
∂2f
∂x21
(x0)∂2f
∂x1∂x2(x0)
∂2f
∂x2∂x1(x0)
∂2f
∂x22
(x0)
2×2
Osservazione 1.7.4 (importante). Supponiamo che m = 2. Se f ∈ C2(B(x0, r0)),
allora vale che:
f(x) = P2(f, x0)(x) +R2(x, 0)
con
44

1.7 Formula di Taylor
P2(f, x0) =∑
|α|<2
Dα(f(x0))
α!(x− x0)α =
=∑
|α|=0
Dα(f(x0))
α!(x− x0)α +
∑
|α|=1
Dα(f(x0))
α!(x− x0)α +
∑
|α|=2
Dα(f(x0))
α!(x− x0)α =
f(x0) + df(x0)(x− x0) +∑|α|=2
Dα(f(x0))α! (x− x0)α
Si puo facilmente verificare (basta fare i conti!) che:
∑
|α|=2
Dα(f(x0))
α!(x− x0)α =
1
2
(H(f)(x0)(x− x0)T • (x− x0)
)
Concludendo, se f ∈ C2(B(x0, r0)), vale che:
(FT2) f(x) = f(x0) + df(x0)(x− x0) +1
2
(H(f)(x0)(x− x0)T • (x− x0)
)+R2(x, x0)
con
∃ limx→x0
R2(x, x0)
||x− x0||22
45

1. CALCOLO IN PIU VARIABILI
46
Capitolo 2
Massimi e minimi per funzioni di
piu variabili
Versione: 20130823-083351
2.1 Il Teorema di Fermat
Definizione 2.1.1. Siano A ⊆ Rn, f : A −→ R.
(i) Un punto P0 ∈ A si dice punto di minimo relativo (o locale) [rispettivamente
punto di massimo relativo (o locale)] se ∃ r0 > 0 tale che
f(P0) ≤[≥]
f(P ) ∀P ∈ A ∩ B(P0, r0)
(ii) Un punto P0 ∈ A si dice punto di minimo (assoluto o globale) [rispettivamente
punto di massimo relativo (assoluto o globale)] se
f(P0) ≤[≥]
f(P ) ∀P ∈ A
Si definiscono, se esistono,
maxAfdef= max{f(P ) : P ∈ A}
minAfdef= min{f(P ) : P ∈ A}
47

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
Se esistono, maxAf e min
Af sono unici. Si definiscono inoltre
supAfdef= sup{f(P ) : P ∈ A}
infAfdef= inf{f(P ) : P ∈ A}
supAf e inf
Af esistono sempre per l’Assioma di Completezza dei reali.
Teorema 2.1.1 (di Fermat). Siano A ⊆ Rn, f : A −→ R. Supponiamo che, dato
P0 ∈ A,
(i) P0 sia un punto di massimo o minimo relativo di f su A.
(ii) ∃∇f(P0).
(iii) P0 sia un punto interno di A, cioe ∃r0 > 0 tale che B(P0, r0) ⊆ A(1).
Allora
∇f(P0) = 0 = (0, . . . , 0)
Dimostrazione:
x1
x2
r0
P0
x01
x02
(1)Se P0 non fosse interno, si avrebbero dei problemi. Ad esempio (n = 1), se A = [0, 1] e f(x) = x,
allora x0 = 0 e un punto di minimo relativo, ma f ′(x0) = 1 6= 0.
48

2.1 Il Teorema di Fermat
Fissato i = 1, . . . , n, poiche P 0 e interno, P 0 + hei ∈ B(P 0, r0) se |h| ≤ r0. Definiamo
F : (−r0, r0) −→ R, F (h) = f(P 0 + hei)
(Per h = 0, F (h) e interno!)
Applicando il teorema di Fermat in una variabile(2) , otteniamo che:
∃F ′(0) = 0
+
∂f
∂xi(P 0) ∀ i = 1, 2, . . . , n
�
Definizione 2.1.2. Dati A ⊆ Rn e f : A −→ R, si chiamano punti stazionari (o
critici) liberi di f su A i punti P 0 ∈ A tali che:
(S1) ∃∇f(P )
(S2) ∇f(P ) = 0
Esempio. f : R2 −→ R, f(x, y) = x2 − y2. Poniamo il gradiente di f uguale a 0 per
trovare i punti stazionari:
∇f(x, y) = 2(x, −y) = (0, 0)⇐⇒ x = y = 0
P0 = (0, 0) e quindi un punto di minimo o massimo relativo di f? NO!
Basta studiare il segno di f(x, y) = x2− y2 = (x− y)(x+ y) in un intorno di (0, 0)
per accorgersi che non e cosı:
(2) [Gre] Sia f una funzione numerica, e x un punto di massimo locale (o minimo locale) di f . Se x e
interno al dominio di f ed f e derivabile in x, allora
f ′(x) = 0
49

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
x− y = 0
x+ y = 0
La funzione non e definitivamente positiva o negativa, come dovrebbe essere nel caso di
un punto di massimo o di minimo! In particolare, in questo caso si dice che il punto e
di sella.
Definizione 2.1.3. Sia H = (hij)n×n a coefficienti reali (cioe hij ∈ R ∀ i, j =
1, . . . , n).
(i) H si dice definita positiva se (Hv • v) > 0 ∀v ∈ Rn \ {0}
(ii) H si dice definita negativa se (Hv • v) < 0 ∀v ∈ Rn \ {0}
(iii) H si dice semidefinita positiva se (Hv • v) ≥ 0 ∀v ∈ Rn \ {0}
(iv) H si dice semidefinita negativa se (Hv • v) ≤ 0 ∀v ∈ Rn \ {0}
Lemma 2.1.1 (Criterio per i segni di una matrice quadrata simmetrica). Sia H =
(hij)n×n simmetrica (cioe, per definizione, hij = hji ∀ i, j = 1, . . . , n). Allora defi-
niamo come:
mdef= “il piu piccolo autovalore di H”
Mdef= “il piu grande autovalore di H”
Allora
(?) m||v||2n ≤ Hv • v ≤M ||v||2n
Da (?) e dalla definizione, segue che:
(i) H e definita positiva ⇐⇒ m > 0
50

2.1 Il Teorema di Fermat
(ii) H e definita negativa ⇐⇒ M < 0
(iii) H e semidefinita positiva ⇐⇒ m ≥ 0
(iv) H e semidefinita negativa ⇐⇒ M ≤ 0
Teorema 2.1.2. Siano A ⊆ Rn, f : A −→ R, e supponiamo che f ∈ C2(A). Sia ora
x0 ∈ A un punto stazionario (libero) di f su A, cioe, per definizione, ∇f(x0) = 0.
Prendiamo inoltre la matrice H(f)(x0) =
(∂2f
∂xi∂xj(x0)
)
n×n, detta matrice hessiana
di f nel punto x0. Allora
(i) Se H(f)(x0) e definita positiva =⇒ x0 e un punto di minimo relativo di
f su A
(ii) Se H(f)(x0) e definita negativa =⇒ x0 e un punto di massimo relativo
di f su A
(iii) Se x0 e un punto di minimo relativo di f su A =⇒ H(f)(x0) e semide-
finita positiva
(iv) Se x0 e un punto di massimo relativo di f su A =⇒ H(f)(x0) e semide-
finita negativa
Dimostrazione:
(i) (n = 2)
P0
x
y
r1r0
A
51

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
EssendoA aperto, ∃ r0 > 0 tale che B(x0, r0) ⊂ A, e quindi f ∈ C2(B(x0, r0)
).
Applicando la formula di Taylor al II ordine, cioe (FT2), otteniamo che:
(1) f(x) = f(x0) + df(x0)(x− x0) +1
2
(H(f)(x− x0) • (x− x0)
)+R2(x, x0)
tale che
(2) ∃ limx→x0
R2(x, x0)
||x− x0||2n= 0
Essendo x0 un punto stazionario di f , vale:
df(x0)(x− x0) = ∇f(x0) • (x− x0) = 0
Dunque possiamo riscrivere la (1) nel modo seguente:
(3) f(x)− f(x0) =1
2
(H(f)(x− x0) • (x− x0)
)+R2(x, x0)
Sia m il piu piccolo degli autovalori di H(f)(x0). Da (?), prendendo H =
H(f)(x0), ottengo che:
(4) f(x)− f(x0) ≥ m
2||x− x0||2n +R2(x, x0)
ed m > 0, essendo H(f)(x0) definita positiva.
Dalla (2), usando la definizione e scegliendo ε = m2 > 0, ∃ 0 < r1 < r0 tale
che:
(5) −m2<R2(x, x0)
||x− x0||2n<m
2∀x ∈ B(x0, r1) \ {x0}
Da (4) + (5) (moltiplicando (5) per ||x− x0||2n), segue che
(6)f(x)− f(x0) ≥ m
2 ||x− x0||2n − m2 ||x− x0||2n ∀x ∈ B(x0, r1)∣∣
≥ 0
def⇐⇒
x0 e un punto stazionario di minimo relativo di f su A
(ii) Si dimostra similmente al punto precedente, definendo M il piu grande degli
autovalori di H(f)(x0) e applicando poi la (?).
52

2.1 Il Teorema di Fermat
(iii) Prendiamo la direzione v ∈ Rn\{0} (ricordiamo che, poiche v e una direzione,
||v||n = 1).
P0
x
y
A→v
Definiamo
F (t) = f(x0 + tv) se |t| ≤ δ
(ossia f ristretta ad una direzione).
Osserviamo che, essendo A aperto, F e ben definita se δ e abbastanza piccolo.
Per ipotesi, t = 0 e un punto di minimo relativo di F : [−δ, δ] −→ R con
F = f ◦ g
dove g : [−δ, δ] −→ A tale che g(t) = x0 + tv, quindi:
F ′′(0) ≥ 0
Nella dimostrazione del Teorema di Taylor, avevamo gia calcolato che:
F (k)(t) =2∑
i1=1,...,ik=1
∂kf
∂xi1 . . . ∂xik(x0 + t(x− x0))(xi1 − x0
i1) . . . (xik − x0ik
)
Nel nostro caso, la formula diventa:
F (2)(0) =2∑
i1=1, i2=1
∂2f
∂xi1∂xi2(x0)(xi1 − x0
i1)(xi2 − x0i2) = H(f)(x0)v • v
con v = (x− x0). Dunque, ∀ v ∈ Rn \ {0},
H(f)(x0)v • v ≥ 0
53

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
�
Esercizio (Ex. 5, Foglio 5). Determinare i massimi e i minimi relativi della funzione
f(x, y) + x2 + 2kxy + y2, (x, y) ∈ R2
al variare del parametro k ∈ R.
Dimostrazione: Osserviamo che f ∈ C2(R2) (in effetti, f ∈ C∞(R2)). I punti
stazionari liberi di f sono dati dall’equazione:
∇f(x, y) = (0, 0)
ossia, sviluppando,
(2x+ 2ky, 2kx+ 2y) = 2(x+ ky, kx+ y) = (0, 0)
m{x+ ky = 0
kx+ y = 0
Scriviamo la matrice associata al sistema e risolviamo:(
1 k 0k 1 0
)⇐⇒
II − kI
(1 k 00 1− k2 0
)
Discutiamo i casi che ci si presentano:
• k 6= 1: Il sistema ammette soluzione unica (0, 0).
• k = ±1: Il sistema ammette infinite soluzioni, generate dai vettori
(11
)e
(−11
).
Andiamo ora a calcolare H = H(f)(x, y) =
=
(∂2f∂x2 (x, y) ∂2f
∂x∂y (x, y)∂2f∂y∂x(x, y) ∂2f
∂y2 (x, y)
)=
(2 2k2k 2
)
Quindi, calcoliamo gli autovalori di H secondo la definizione:
det(H − λI) = 0⇐⇒ det
(2− λ 2k
2k 2− λ
)= 0⇐⇒ (2− λ)2 − 4k2 = 0⇐⇒
54

2.2 Il Teorema di Weierstrass
⇐⇒ (2− λ− 2k)(2− λ+ 2k) = 0
e in definitiva: {λ1 = 2− 2k
λ2 = 2 + 2k
Ne deduciamo che:
• Se |k| > 1, λ1λ2 < 0 e quindi
– H non e ne semidefinita positiva ne semidefinita negativa
– x0 e un punto di sella
• Se |k| < 1, λ1 > 0, λ2 > 0 e quindi
– H e definita positiva e (0, 0) e punto di minimo relativo di f su R2
• Se |k| = 1, e necessaria un’analisi diretta.
– Per k = 1,
f(x, y) = x2 + 2xy + y2 = (x+ y)2
I punti tali che (x+ y) = 0 sono punti di minimo relativo (e assoluto) su R2.
– Per k = −1,
f(x, y) = x2 − 2xy + y2 = (x− y)2
I punti tali che (x− y) = 0 sono punti di minimo relativo (e assoluto) su R2.
�
2.2 Il Teorema di Weierstrass
Problema: Data f : A ⊆ Rn −→ R, ∃minAf e/o max
Af , cioe ∃P1, P2 ∈ A tale che
f(P2) ≤ f(P ) ∀P ∈ A
f(P ) ≤ f(P1) ∀P ∈ A
dove P1 e punto di massimo assoluto di f su A e P2 punto di minimo relativo di f su
A?
55

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
Definizione 2.2.1. Un insieme A ⊂ Rn si dice limitato se ∃R0 > 0 tale che
A ⊂ B(0, R0)⇐⇒ ||P ||n ≤ R0 ∀P ∈ A
Lemma 2.2.1 (di Bolzano - Weierstrass). Sia A chiuso e limitato e sia (Ph)h ⊂A. Allora esiste una sottosuccessione (Pσh)h (σ : N −→ N strettamente crescente)
convergente ad un opportuno punto P ∗ ∈ A, cioe
limh→+∞
||Pσh − P ∗||n= 0
Dimostrazione: (Solo nel caso n = 2)
x
y
Ph
xh
yh
“buchi”A
R0
Sia Ph = (xh, yh). Dalla limitatezza di A segue che ∃R0 > 0 tale che A ⊂ B(0, R0).
In particolare,
(1) ||Ph||2 =√x2h + y2
h ≤ R0 ∀h ∈ N
Da (1) segue che
(2) |xh| ≤ R0 ∀h ∈ N
(3) |yh| ≤ R0 ∀h ∈ N
56

2.2 Il Teorema di Weierstrass
Da (2) segue che
(xh)h ⊂ [−R0, R0]
e quindi, per il lemma di Bolzano - Weierstrass in R, esiste una successione (xσ1(h))h
(con σ1 : N −→ N strettamente crescente) tale che:
(4) ∃ limh→∞
xσ1(h) = x∗ (in R)
per un opportuno x∗ ∈ [−R0, R0]. Sia
th + yσ1(h) (h ∈ N)
(cioe (yh)h ristretta agli insiemi di indici dati da σ1). Dalla (3) segue che (th)h ⊂[−R0, R0], e quindi applicando il lemma di Bolzano - Weierstrass in R otteniamo che
esiste una sottosuccessione
(tσ2(h))h (con σ2 : N −→ N strettamente crescente)
tale che
(5) ∃ limh→∞
tσ2(h) = y∗ (in R)
per un opportuno y∗ ∈ [−R0, R0]. Definiamo
σ : N −→ N tale che σ = σ2 ◦ σ1 : N −→ N
strettamente crescente. Consideriamo la successione
Pσ(h) =(xσ(h), yσ(h)
)
estratta dalla successione (Ph)h. Per costruzione, da (4) e (5) segue che
(6) ∃ limh→∞
Pσ(h) = P ∗ (in R2)
dove P ∗ = (x∗, y∗) ∈ R2 (3).
In tutto quello che abbiamo ottenuto finora, abbiamo utilizzato solo la limitatezza
di A. Poiche A e chiuso, P ∗ ∈ A.
(3)xσ(h) e una successione estratta da xσ1(h). Poiche
• ogni successione estratta da una successione convergente e anch’essa convergente ed ha per limite
lo stesso limite della successione di partenza
• xσ1(h) converge a x∗
allora anche xσ(h) converge a x∗.
57

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
�
Teorema 2.2.1 (di Weierstrass). Sia A ⊆ Rn, f : A −→ R. Supponiamo che:
(i) A sia chiuso e limitato
(ii) f : A −→ R sia continua
Allora
∃maxAf e ∃min
Af
Dimostrazione: Dall’Assioma di Completezza dei numeri reali, segue che
(1) ∃ infAf + inf{f(P ) : P ∈ A} ∈ [−∞, +∞)
(2) ∃ supAf + sup{f(P ) : P ∈ A} ∈ (−∞, +∞]
Definiamo ora
m + infAf e M + sup
Af
Per definizione di estremo superiore, vale che ∀ ε > 0, ∃Qε = Q(ε) ∈ A tale che
M − ε ≤ f(Qε) ≤M
Data l’arbitrarieta di ε, prendiamo ε = 1h , h ∈ N>0. Dunque, ∀h > 0, ∃Qh = Q(h) ∈
A : M − 1h ≤ f(Qh) ≤M . Chiaramente,
(3) M = limh→∞
f(Qh) (in R)
e la successione (Qh)h ⊆ A si dice successione massimizzante. Allo stesso modo, esiste
una successione minimizzante (Ph)h ⊆ A tale che
(4) m = limh→∞
f(Ph) (in R)
Proviamo che ∃P1 ∈ A tale che
(5) f(P1) = m
58

2.3 Ricerca di massimi e minimi
da cui seguira che
∃minAf = f(P1)
o, in altre parole, proviamo che m oltre che estremo inferiore dell’insieme {f(P ) : O ∈A} e anche minimo di tale insieme. Analogamente, si potra ottenere che
∃P2 ∈ A tale che f(P2) = M
Applichiamo il lemma di Bolzano - Weierstrass alla successione (Ph): otteniamo che
esiste una sottosuccessione (Pσ(h))h ed un punto P1 ∈ A tale che:
(6) ∃ limh→∞
Pσ(h) = P1 (in Rn)
Osserviamo che da (4) e (6) segue che
(7) ∃ limh→∞
f(Pσ(h)) = m
Per la (ii), segue che
limh→∞
f(Pσ(h)) = f(P1)
�
2.3 Ricerca di massimi e minimi
2.3.1 Ricerca del massimo e minimo (assoluto) di una funzione con-
tinua definita su un insieme chiuso e limitato
Siano A ⊆ R2 chiuso e limitato, f : A −→ R continua. Applicando il Teorema di
Weierstrass, sappiamo che
∃minAf = f(P1) con P1 ∈ A
∃maxAf = f(P2) con P2 ∈ A
Problema: Come determinare Pi (i = 1, 2)?
Vi sono tre possibilita:
(1) Pi ∈ A, ∃∇f(Pi) = 0 (punto stazionario libero)
59

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
(2) @∇f(Pi) (punto singolare di f)
(3) Pi ∈ ∂A (punto stazionario vincolato)
Esempio. A = {(x, y) ∈ R2 : x2 + y2 ≤ 1}, f(x, y) = x2 + y2.
A
1
1
−1
−1
Osserviamo che A e chiuso e f : A −→ R e continua. Quindi,
∃minAf = f(P1) con P1 ∈ A
∃maxAf = f(P2) con P2 ∈ A
Inoltre, f ∈ C∞(R2), quindi f ∈ C∞(A). I punti in cui si annulla il gradiente sono
dati da
∇f(x, y) = (2x, 2y) = (0, 0)⇐⇒ x = y = 0
E chiaro che P1 = (0, 0) ed e un punto stazionario libero di f su A. Osserviamo inoltre
che
∇f(x, y) 6= (0, 0) ∀ (x, y) ∈ ∂A
Su questi punti non possiamo applicare il Teorema di Fermat!
2.3.2 Ricerca dei punti di massimo e minimo nella frontiera di un
insieme
2.3.2.1 I Metodo: parametrizzazione della frontiera
(n = 2)
Supponiamo che esista una curva ϕ : [a, b] −→ R2
ϕ(t) = (ϕ1(t), ϕ2(t))
60

2.3 Ricerca di massimi e minimi
con ϕi : [a, b] −→ R2 di classe C1 (i = 1, 2), tale che
ϕ([a, b]) = ∂A
Allora ϕ si chiama parametrizzazione di ∂A. Nell’esempio precedente avremmo avuto
ϕ : [0, 2π] −→ R2, ϕ(t) = (cos(t), sin(t)).
Se f : A −→ R, basta quindi considerare la funzione
F : [a, b] −→ R tale che F (t) = f(ϕ(t)), t ∈ [a, b]
A questo punto,
max∂A
f = max[a, b]
F e min∂A
f = min[a, b]
F
Esempio. A = {(x, y) ∈ R2 : x2 + 2y2 ≤ 1}, f(x, y) = x2 + 2y2.
Una parametrizzazione di ∂A e
F (t) = cos2(t) + 2 sin2(t) = 1 + sin2(t) (t ∈ [0, 2π])
La ricerca di massimi e minimi di f sulla frontiera di A si riduce alla ricerca di massimi
e minimi di F sull’intervallo [0, 2π]. Abbiamo:
F ′(t) = 2 sin(t) cos(t) = 2 sin(2t)
I punti di massimo di F su [0, 2π] sono quindiπ
2,
3
2π.
Di conseguenza, abbiamo che:
P2 =
ϕ(π2
)= (0, 1)
ϕ(
32π)
= (0, −1)
(n = 3)
Supponiamo che esista una curva ϕ : B −→ R3, B ⊆ R2 chiuso e limitato, definita
ϕ = (ϕ1, ϕ2, ϕ3)
con ϕi : B −→ R3 ∈ C0(B) ∩ C1(B) (i = 1, 2, 3), tale che
ϕ(B) = ∂A
Allora ϕ si chiama parametrizzazione di ∂A e vale F = f ◦ ϕ.
61

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
Esempio. Sia A = {(x, y, z) : x2 + y2 + z2 ≤ 1}, e supponiamo di voler trovare
massimo e minimo di f su A.
Osserviamo innanzitutto che ∂A e la superficie sferica di raggio unitario, quindi
basta usare la parametrizzazione data dalle coordinate sferiche, come avevamo fatto per
le due dimensioni usando le coordinate polari.
x
y
z(ρ, θ, τ)
τ
θ
ρ
θ
τ
ρsin(τ)ρs
in(τ)co
s(θ)
ρsin(τ)sin(θ)
ρcos
(τ)
Come mostrato nella figura, la parametrizzazione sferica di un punto in R3 e
ϕ(ϑ, τ) = (cos(ϑ) sin(τ), sin(ϑ) sin(τ), cos(τ)) (ϑ, τ) ∈ [0, 2π]× [0, π]
A questo punto, basta procedere come nell’esempio precedente.
2.3.2.2 II Metodo: la frontiera di un insieme come vincolo
Definizione 2.3.1. Un insieme del piano V = {(x, y) ∈ R2 : g(x, y) = 0} si chiama
vincolo.
Per trattare i vincoli come funzioni, servira il Teorema delle Funzioni Implicite
di Dini. Supponiamo che A ⊆ R2 aperto e limitato e che ∂A sia un vincolo, ossia
∂A{(x, y) ∈ R2 : g(x, y) = 0} dove g ∈ C1(R2). Allora, si puo usare il seguente
teorema.
Teorema 2.3.1 (dei moltiplicatori di Lagrange). Sia f ∈ C1(R2) (in realta non c’e
bisogno su tutto R2!) e sia g ∈ C1(R2). Supponiamo che V = {(x, y) ∈ R2 : g(x, y) =
0} e sia P0 = (x0, y0) ∈ V. Se
62

2.3 Ricerca di massimi e minimi
(i) ∃maxVf = f(P0) oppure ∃min
Vf = f(P0)
(ii) ∇g(P0) 6= (0, 0)
allora esiste un λ0 ∈ R (detto moltiplicatore di Lagrange) per cui il punto (x0, y0, λ0) ∈R3 e un punto stazionario libero della funzione L : R3 −→ R (detta funzione lagrangia-
na) definita
L(x, y, λ) = f(x, y) + λg(x, y) dove (x, y, λ) ∈ R3
cioe vale che
∇L(P0) =
(∂f
∂x(P0) + λ0
∂g
∂x(P0),
∂f
∂y(P0) + λ0
∂g
∂y(P0), g(P0)
)= (0, 0, 0)
o, equivalentemente,
(?) g(P0) = 0 e ∇f(P0) + λ0∇g(P0) = (0, 0)
Definizione 2.3.2. Si chiama punto stazionario vincolato della funzione f sul vincolo
V un punto P0 ∈ R2 che verifica (?).
Premettiamo, prima della dimostrazione del Teorema di moltiplicatori di Lagrange,
il seguente (fondamentale) teorema.
Teorema 2.3.2 (delle funzioni implicite, U. Dini). Siano g ∈ C1(A), A ⊆ R2 aperto,
P0 = (x0, y0) ∈ A e supponiamo che
(i) g(P0) = 0
(ii)∂g
∂y(P0) 6= 0
Allora
(D1) V = {(x, y) ∈ R2 : g(x, y) = 0} e localmente il grafico in un intorno di P0 di
una funzione y = h(x), cioe esistono δ > 0, r0 > 0 ed esiste un’unica funzione
h : (x0 − δ, x0 + δ) −→ R tale che
h(x0) = y0 e V ∩ B(P0, r0) = {(x, h(x) : x ∈ (x0 − δ, x0 + δ)}
(D2) h e di classe C1 su (x0 − δ, x0 + δ) e
h′(x) = −∂g
∂x(x, h(x))
∂g
∂y(x, h(x))
∀x ∈ (x0 − δ, x0 + δ)
63

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
Dimostrazione: (del Teorema dei moltiplicatori di Lagrange)
Per il Teorema delle funzioni implicite, esistono δ > 0, r0 > 0 ed una (unica) funzione
h : (x0 − δ, x0 + δ) −→ R per cui valgono le proprieta (D1) e (D2) se supponiamo, per
esempio, ∂g∂y (P0) 6= 0.
Consideriamo la funzione F : (x0 − δ, x0 + δ) −→ R tale che
F (x) + f(x, h(x)) con x ∈ (x0 − δ, x0 + δ)
Valendo (i), x0 e un punto di massimo o minimo relativo di F su (x0 − δ, x0 + δ). Per
la (RDC), F e di classe C1 su (x0 − δ, x0 + δ) e
F ′(x) =∂f
∂x(x, h(x)) · 1 +
∂f
∂y(x, h(x)) · h′(x) (4)
Per il Teorema di Fermat (in una variabile),
0 = F ′(x0) =∂f
∂x(P0) +
∂f
∂y(P0) · h′(x0)
(D2)=
∂f
∂x(P0) +
∂f
∂y(P0) ·
−
∂g
∂x(P0)
∂g
∂y(P0)
moltiplicando tutto per ∂g∂y (P0), otteniamo
0 =∂f
∂x(P0)
∂g
∂y(P0)− ∂f
∂y(P0)
∂g
∂x(P0) = det
(∂f∂x (P0) ∂f
∂y (P0)∂g∂x(P0) ∂g
∂y (P0)
)
ossia
det
(∇f(P0)∇g(P0)
)= 0
In altre parole, ∇f(P0) e ∇g(P0) sono linearmente dipendenti! Quindi, ∃λ0 ∈ R tale
che valga (?).
�
(4) F = f ◦ γ, dove γ(x) = (x, h(x)). Per la (RDC), vale che
F ′(x) = ∇f(γ(x)) • γ′(x) = ∇f(x, h(x)) • γ′(x)
dove γ′(x) = (1, h′(x))
64

2.3 Ricerca di massimi e minimi
2.3.3 Interpretazione geometrica della condizione di punto stazionario
vincolato
Dal Teorema di Dini, sappiamo che localmente V e il grafico di una funzione regolare.
Per esempio, nel caso in cui ∂g∂y (P0) 6= 0, conosciamo anche l’equazione della retta
tangente a V nel punto P0 = (x0, y0). Piu precisamente, e la retta di equazione y =
h′(x0)(x− x0) + y0 dove, da (D2),
h′(x0) = −∂g
∂x(P0)
∂g
∂y(P0)
La retta tangente e generata (a meno di traslazione) dal vettore (1, h′(x0)). Inoltre,
vale che
∇g(P0) •(1, h′(x0)
)= 0
Dunque ∇g(P0) e ortogonale alla retta tangente a V nel punto P0.
P0
∇g(P0)
Pertanto i punti P0 ∈ V per cui vale (?) sono i punti P0 ∈ V dove ∇f(P0) (e anche
∇g(P0), poiche sono linearmente dipendenti) e ortogonale al vincolo V in P0.
Esempio. f(x, y) = x2 + 2y2, V = {(x, y) ∈ R2 : x2 + y2 = 1}. Determinare maxVf e
minVf .
Dimostrazione: Applichiamo il metodo dei moltiplicatori di Lagrange. Definendo
g(x, y) + x2 + y2 − 1, (x, y) ∈ R2
osserviamo che f, g ∈ C∞(R2), e
∇g(x, y) = (2x, 2y) = 2(x, y) 6= (0, 0) ∀(x, y) ∈ V
65
2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
Per giungere alla soluzione basta quindi studiare i punti stazionari liberi della funzione
lagrangiana
L(x, y, λ) = f(x, y) + λg(x, y) = x2 + 2y2 + λ(x2 + y2 − 1)
cioe i punti (x, y, λ) ∈ R3 tali che
∂L∂x (x, y, λ) = 2x+ 2λx = 0∂L∂y (x, y, λ) = 4y + 2λy = 0∂L∂λ (x, y, λ) = x2 + y2 − 1 = 0
⇐⇒
x = ±1
y = 0
λ = −1
∨
x = 0
y = ±1
λ = −2
Quindi i punti stazionari vincolati di f su V sono (±1, 0), (0, ±1).
�
E facile generalizzare il metodo dei moltiplicatori di Lagrange ad una funzione di 3
variabili.
Teorema 2.3.3 (dei moltiplicatori di Lagrange). Sia f ∈ C1(R3) e sia g ∈ C1(R3).
Supponiamo che V = {(x, y, z) ∈ R3 : g(x, y, z) = 0} e sia P0 = (x0, y0, z0) ∈ V. Se
(i) ∃maxVf = f(P0) oppure ∃min
Vf = f(P0)
(ii) ∇g(P0) 6= (0, 0, 0)
allora esiste un λ0 ∈ R (detto moltiplicatore di Lagrange) per cui il punto (x0, y0, z0, λ0) ∈R4 e un punto stazionario libero della funzione L : R4 −→ R (detta funzione lagrangia-
na) definita
L(x, y, z, λ) = f(x, y, z) + λg(x, y, z) dove (x, y, z, λ) ∈ R4
cioe vale (?).
66
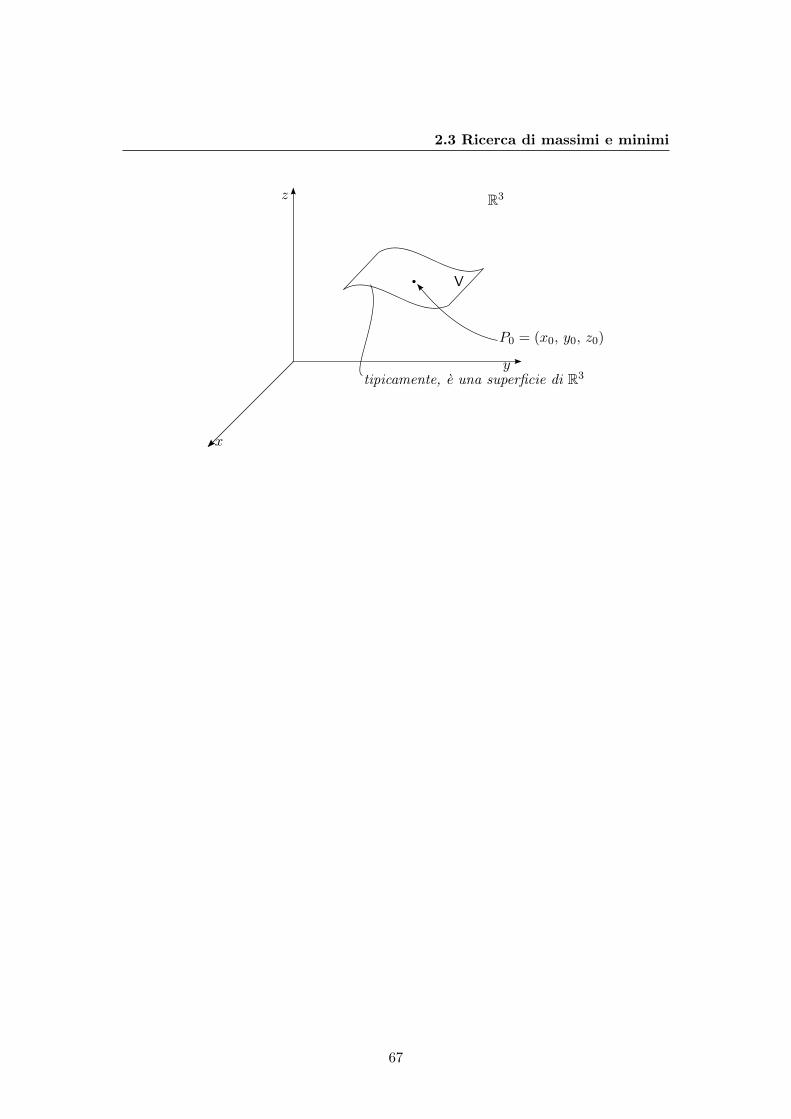
2.3 Ricerca di massimi e minimi
V
P0 = (x0, y0, z0)
tipicamente, e una superficie di R3y
x
z R3
67

2. MASSIMI E MINIMI PER FUNZIONI DI PIU VARIABILI
68

Capitolo 3
Teorema delle funzioni implicite
ed applicazioni
Versione: 20130823-083351
3.1 Caso n = 2
Consideriamo V = {(x, y) ∈ R2 : g(x, y) = 0}, dove g ∈ C1(R2). Osserviamo che,
cercando il luogo di zeri di una funzione di 2 variabili (due gradi di liberta), abbiamo
un vincolo che abbassa gradi di liberta , e quindi ci aspettiamo una curva, che ha solo
1 grado di liberta.
x
y
V
Problema: Localmente, V e un grafico del piano cartesiano? In generale, non vi e una
risposta positiva. Per esempio, g ≡ 0 su R2 rappresenta tutto il piano ∀ (x, y) ∈ R2.
69

3. TEOREMA DELLE FUNZIONI IMPLICITE ED APPLICAZIONI
E quindi fondamentale il seguente risultato da parte di Dini, gia accennato in
precedenza, che enunciamo nuovamente.
Teorema 3.1.1 (delle funzioni implicite, U. Dini). Siano g ∈ C1(A), A ⊆ R2 aperto,
P0 = (x0, y0) ∈ A e supponiamo che
(i) g(P0) = 0
(ii)∂g
∂y(P0) 6= 0
Allora
(D1) esistono δ > 0, σ > 0 tali che il rettangolo R = [x0−δ, x0+δ]×[y0−σ, y0+σ] ⊆A e ∀x ∈ (x0 − δ, x0 + δ) fissato, ∃! y + h(x) ∈ [y0 − σ, y0 + σ] tale che
g(x, y) = 0.
In altre parole, ∃! una funzione h : (x0 − δ, x0 + δ) −→ (y0 − σ, y0 + σ) tale
che g(x, h(x)) = 0.
(D2) h e di classe C1 su (x0 − δ, x0 + δ) e
(?) h′(x) = −∂g
∂x(x, h(x))
∂g
∂y(x, h(x))
∀x ∈ (x0 − δ, x0 + δ)
Dimostrazione:(1) Supponiamo, per esempio, che ∂g∂y (P0) > 0. Dal fatto che g ∈
C1(A), le derivate prime sono continue, quindi vale la permanenza del segno (2).
(1)Si veda anche [Con](2) Teorema (della permanenza del segno). Siano A ⊂ Rn e f : A −→ R continua in un punto
P0 ∈ A con f(P0) > 0. Allora ∃ r0 > 0 tale che
f(P ) > 0 ∀P ∈ B(P0, r0) ∩A
70

3.1 Caso n = 2
P0
A
x
y
x0 − δ x0 + δ
x0
Ry0 − σ
y0 + σ
y0
{g = 0} = V
In altre parole, esistono δ, σ > 0 tali che
(1) R = [x0 − δ, x0 + δ]× [y0 − σ, y0 + σ] ⊂ A
(l’inclusione non vale perche A e aperto!) e
(2)∂g
∂y(x, y) > 0 ∀ (x, y) ∈ R
Consideriamo ora la funzione (di una variabile reale) ottenuta “congelando” x0 e
muovendoci rispetto a y, ossia la funzione
[y0 − σ, y0 + σ] 3 y 7−→ g(x0, y) ∈ R
Per la (2), tale funzione e strettamente crescente. D’altra parte, per la (i), deve accadere
che
g(x0, y0 − σ) < 0 e g(x0, y0 + σ) > 0
Applicando ancora il teorema della permanenza del segno otteniamo che, pur di dimi-
nuire δ, non e restrittivo supporre che
(3) g(x, y0 − σ) < 0 e g(x, y0 + σ) > 0 ∀x ∈ (x0 − δ, x0 + δ)
71

3. TEOREMA DELLE FUNZIONI IMPLICITE ED APPLICAZIONI
Da (2) + (3) segue che, essendo
[y0 − σ, y0 + σ] 3 y 7−→ g(x, y) ∈ R
strettamente crescente ∀x ∈ (x0 − δ, x0 + δ) fissato, possiamo concludere che, per il
teorema dei valori intermedi, vale (D1).
Proviamo (D2).
Consideriamo due punti P ′ = (x′, h(x′)) e P = (x, h(x)) con x, x′ ∈ (x0−δ, x0+δ).
In particolare, P, P ′ ∈◦R. Poiche
◦R e un aperto convesso, possiamo scrivere (per
definizione di h)
(4) 0 = g(P ′)− g(P ) = ∇g(P ) • (P ′ − P )
per un opportuno P ∈ P ′P , la cui esistenza e assicurata dal teorema del valor medio
di Lagrange. Dalla (4) segue che
0 =∂g
∂x(P )(x− x′) +
∂g
∂y(P )(h(x)− h(x′)) ∀x, x′ ∈ (x0 − δ, x0 + δ)
ossia
(5)h(x)− h(x′)
x− x′ = −∂g
∂x(P )
∂g
∂y(P )
Da (2) + (5), segue che
∣∣∣∣h(x)− h(x′)
x− x′∣∣∣∣ ≤
∣∣∣∣∣∣∣∣
maxR
{∂g
∂x
}
minR
{∂g
∂y
}
∣∣∣∣∣∣∣∣= L ∈ (0, +∞)
In altre parole, abbiamo provato che h e lipschitziana su (x0 − δ, x0 + δ), e poiche una
funzione lipschitziana e sempre continua, siamo autorizzati a far tendere x′ → x nella
(5) per ottenere (?).
�
72

3.1 Caso n = 2
Osservazione 3.1.1 (i). Nel caso in cui ∂g∂x(P0) 6= 0, con P0 = (x0, y0), g(P0) = 0,
allora esistono δ, σ > 0 tali che
R = [x0 − δ, x0 + δ]× [y0 − σ, y0 + σ] ⊂ A ∀ y ∈ (y0 − σ, y0 + σ)
e quindi ∃!x + h(y) ∈ (x0 − δ, x0 + δ) tale che g(h(y), y) = 0. Inoltre h : (y0 − σ, y0 +
σ) −→ R e di classe C1 e
(?) h′(y) = −
∂g
∂y(h(y), y)
∂g
∂x(h(y), y)
∀y ∈ (y0 − σ, y0 + σ)
Quindi, se ∇g(P0) 6= (0, 0) possiamo affermare che il vincolo V = {(x, y) ∈ A :
g(x, y) = 0} e localmente il grafico di una funzione y = h(x) oppure x = h(y).
Esercizio. Provare che l’equazione della retta tangente a V nel punto P0 e data da
(RT) ∇g(P0) • (P − P0) = 0
Dimostrazione: Supponiamo, ad esempio, che ∂g∂y (P0) 6= 0. Grazie al teorema di Dini,
sappiamo che, localmente, V e il grafico di una certa funzione y = h(x). Quindi, la
retta tangente a V altro non e che la retta tangente al grafico di h. L’equazione della
retta tangente in P0 e
y = h′(x0)(x− x0) + y0 ⇐⇒ −h′(x0)(x− x0) + (y − y0) = 0
che si puo riscrivere in forma vettoriale come
(−h′(x0), 1) • (P − P0) = 0
Usando (?), l’equazione diventa
∂g
∂x(P0)
∂g
∂y(P0)
, 1
• (P − P0) = 0⇐⇒
(∂g
∂x(P0) ,
∂g
∂y(P0)
)• (P − P0) = 0
ossia
∇g(P0) • (P − P0) = 0
Notiamo che, se avessimo supposto ∂g∂x(P0) 6= 0, l’equazione sarebbe diventata
(1, h′(y0)) • (P − P0) = 0
ma avremmo ottenuto lo stesso risultato.
73

3. TEOREMA DELLE FUNZIONI IMPLICITE ED APPLICAZIONI
�
Esempio. V = {(x, y) ∈ R2 : x2 + y2 = 1}
V
1
1
−1
−1
x
y
Prendendo g(x, y) = x2 + y2 − 1 e P0 = (x0, y0), abbiamo che ∇g(P0) = 2(x0, y0) 6=(0, 0) ∀P0 ∈ V. Quindi, l’equazione della retta tangente e data da
∇g(P0) • (x− x0, y − y0) = 0⇐⇒ x0(x− x0) + y0(y − y0) = 0
Osservazione 3.1.2 (ii). Se g(P0) = 0 e ∇g(P0) = (0, 0) allora non si puo concludere
nulla.
Esempio. g(x, y) = x2 + y2 =⇒ V = {(x, y) ∈ R2 : g = 0} = {(0, 0)}, che ovviamente
non e il grafico di una funzione in un intorno.
3.2 Caso n = 3
Consideriamo V = {(x, y, z) ∈ R3 : g(x, y, z) = 0}, dove g ∈ C1(R3). Localmente, V e
tipicamente una “superficie” di R3.
V
y
x
z R3
74

3.2 Caso n = 3
Si puo provare il seguente teorema delle funzioni implicite.
Teorema 3.2.1. Siano g ∈ C1(A), A ⊆ R3 aperto, P0 = (x0, y0, z0) ∈ A e supponiamo
che
(i) g(P0) = 0
(ii)∂g
∂z(P0) 6= 0
Allora
(D1) esistono δ > 0, σ > 0 tali che il “rettangolo“ (o meglio, il cilindro) B2((x0, y0), δ)×[z0 − σ, z0 + σ] ⊆ A e ∀ (x, y) ∈ B2((x0, y0), δ) fissata, ∃! z + h(x, y) ∈(z0 − σ, z0 + σ) tale che g(x, y, h(x, y)) = 0.
(D2) h e di classe C1 su B2((x0, y0), δ) e
(?) ∇h(x, y) =
(∂h
∂x(x, y),
∂h
∂y(x, y)
)=
= −
(∂g
∂x(x, y, h(x, y)) ,
∂g
∂y(x, y, h(x, y))
)∂g
∂z(x, y, h(x, y))
V
P0 = (x0, y0, z0)
y
x
z R3
75

3. TEOREMA DELLE FUNZIONI IMPLICITE ED APPLICAZIONI
3.2.1 Applicazione: equazione del piano tangente ad un vincolo V ⊂ R3
Supponiamo V = {(x, y, z) ∈ R3 : g(x, y, z) = 0} e, preso P0 ∈ V, supponiamo che
∇g(P0) 6= (0, 0, 0). Come nel caso della retta tangente per n = 2, si puo provare che
l’equazione del piano tangente a V nel punto P0 e data da
(RT) ∇g(P0) • (P − P0) = 0
dove P ∈ V ⊂ R3.
Esempio (retta tangente ad una sfera unitaria). V = {(x, y, z) ∈ R3 : x2+y2+z2 = 1}.Prendendo g(x, y, z) = x2 + y2 + z2 − 1 e P0 = (x0, y0, z0), abbiamo che ∇g(P0) =
2(x0, y0, z0) 6= (0, 0, 0) ∀P0 ∈ V. Quindi, l’equazione della retta tangente e data da
∇g(P0) • (x− x0, y − y0, z − z0) = 0⇐⇒ x0(x− x0) + y0(y − y0) + z0(z − z0) = 0
3.3 Caso generale del Teorema delle funzioni implicite
Prima di enunciare il caso generale, vediamo alcune motivazioni che hanno condotto a
tale teorema.
Supponiamo di considerare x1, . . . , xm, y1, . . . , yk numeri reali legati tra loro da k
condizioni:
(1)
g1(x1, . . . , xm, y1, . . . , yk) = 0
g2(x1, . . . , xm, y1, . . . , yk) = 0...
gk(x1, . . . , xm, y1, . . . , yk) = 0
x1, . . . , xm = parametri realiy1, . . . , yk = incognite del sistema (1)
Problema: fissati x1, . . . , xm ∈ R, esistono e sono unici y1, . . . , yk ∈ R verificanti (1)?
Prima di rispondere, facciamo la seguente osservazione.
Osservazione 3.3.1. Supponiamo che il sistema (1) sia lineare, cioe
gj(x1, . . . , xm, y1, . . . , yk) =k∑
h=1
ajh(x1, . . . , xm) · yh − bj(x1, . . . , xm)
doveajh : Rn −→ R, h = 1, . . . , k
bj : Rm −→ R, j = 1, . . . , k
76

3.3 Caso generale del Teorema delle funzioni implicite
sono funzioni assegnate. Equivalentemente, utilizzando l’algebra lineare, definiamo
a(x) +
a11(x) · · · a1k(x)...
...
ak1(x) · · · akk(x)
k×k
con x ∈ Rm
x = (x1, . . . , xm), b(x) =
b1(x)...
bk(x)
, y =
y1
...
yk
Il sistema (1) si trasforma nel seguente sistema (lineare):
(1bis) a(x) · y = b(x)
Se det(a(x)) 6= 0, ∃! y ∈ Rk soluzione del sistema (1bis) e vale
y = a−1(x) · b(x)
Torniamo ora al nostro sistema originario. Denotiamo
x = (x1, . . . , xm) ∈ Rm, y =
y1...yk
∈ Rk
Possiamo vedere
Rm × Rk ≡ Rn, dove n = m+ k
Definiamo
g : Rm × Rk −→ Rk tale che g(x, y) = (g1(x, y), . . . , gk(x, y))
Quindi, il sistema (1) e equivalente alla condizione
(2) g(x, y) = 0Rk =
k volte︷ ︸︸ ︷(0, . . . , 0)
Se denotiamo con
∂g
∂y=
∂g1
∂y1· · · ∂g1
∂yk...
...∂gk∂y1
· · · ∂gk∂yk
e∂g
∂x=
∂g1
∂x1· · · ∂g1
∂xm...
...∂gk∂x1
· · · ∂gk∂xm
77

3. TEOREMA DELLE FUNZIONI IMPLICITE ED APPLICAZIONI
osserviamo che la matrice jacobiana di g sara
J(g)(x, y) =
(∂g
∂x(x, y)
︸ ︷︷ ︸k×m
,∂g
∂y(x, y)
︸ ︷︷ ︸k×k
)
k×(k+m)=k×n
Osservazione 3.3.2. Come osservato prima, nel caso lineare avremmo avuto
g(x, y) = a(x) · y − b(x)
Notiamo che, in particolare, a(x) =∂g
∂y(x, y).
Nel tentativo di trovare una soluzione y del sistema, si giunge all’enunciato generale
del Teorema di Dini.
Teorema 3.3.1. Siano g : A −→ Rk di classe C1, A ⊆ Rn aperto, P0 = (x0, y0) ∈ A.
Denotiamo con
Bm(x0, r) + {x ∈ Rm : ||x− x0||Rm < r}
e con
Bk(y0, r) + {y ∈ Rk : ||y − y0||Rk < r}
Supponiamo inoltre che
(i) g(P0) = 0
(ii) det
(∂g
∂y(P0)
)6= 0
Allora
(D1) esistono δ > 0, σ > 0 tali che Bm(x0, δ) × Bk(y0, σ) ⊆ A e ∀x ∈ Bm(x0, δ)
fissato, ∃! y + h(x) ∈ Bk(y0, σ) tale che g(x, y) = 0Rk .
(D2) h : Bm(x0, δ) ⊂ Rm −→ Bk(y0, σ) e di classe C1 e
(?) J(h)(x) = −(∂g
∂y(x, h(x))
)−1
· ∂g∂x
(x, h(x))
78

3.3 Caso generale del Teorema delle funzioni implicite
P0
A
Rm
Rk
Bm(x0, δ)
x0
R
Bm(y0, σ)
{g = 0} = V
Rn = Rm × Rk
3.3.1 Applicazione: regola dei moltiplicatori di Lagrange nel caso
generale
Sia f una funzione da massimizzare/minimizzare su un vincolo V = {(x, y) ∈ Rm+k :
g(x, y) = 0Rk} ⊂ Rn (detto anche sottovarieta di Rn), dove g : Rn ≡ Rm × Rk −→ Rk.Vale allora il seguente teorema.
Teorema 3.3.2 (dei moltiplicatori di Lagrange). Sia f : Rn −→ R di classe C1 e sia
g : Rn ≡ Rm×Rk −→ Rk di classe C1. Supponiamo che V = {(x, y) ∈ Rn : g(x, y) = 0}e sia P 0 = (x0, y0) ∈ V. Se
(i) ∃maxVf = f(P 0) oppure ∃min
Vf = f(P 0)
(ii) det(∂g∂y (P 0)
)6= 0
allora esiste un λ0 = (λ01, . . . , λ
0k) ∈ Rk (detto moltiplicatore di Lagrange) per cui il
punto (P 0, λ0) ∈ Rn+k e un punto stazionario libero della funzione L : Rn+k −→ R(detta funzione lagrangiana) definita
L(x, y, λ) + f(x, y) + λ1g1(x, y) + λ2g2(x, y) + . . .+ λkgk(x, y)
dove (x, y, λ) ∈ Rn+k.
79

3. TEOREMA DELLE FUNZIONI IMPLICITE ED APPLICAZIONI
80

Capitolo 4
Introduzione alle ODEs (e
sistemi di ODEs) non lineari
Versione: 20130823-083351
4.1 Cenni sugli spazi metrici
Definizione 4.1.1.
(i) Dato un insieme X, si chiama metrica su X una funzione d : X × X −→[0, +∞] verificante
(d1) d(x, y) = 0 ⇐⇒ x = y
(d2) d(x, y) = d(y, x) ∀x, y ∈ X
(d3) d(x, y) ≤ d(x, z) + d(z, y) ∀x, y, z ∈ X
(ii) Una successione (xn)n ⊂ X si dice convergente in (X, d) se ∃x ∈ X tale che
limh→∞
d(xh, x) = 0
(iii) Una successione (xn)n ⊂ X si dice una successione di Cauchy se ∀ ε >
0 ∃h = h(ε) ∈ N tale che
d(xh, xk) < ε ∀h, k > h
81

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
(iv) Uno spazio metrico (X, d) si dice completo se ogni successione di Cauchy
(xn)n ⊂ X e convergente, cioe ∃x ∈ X tale che
∃ limh→∞
d(xh, x) = 0
(v) Siano (X, d) e (Y, p) spazi metrici e sia T : X −→ Y . T si dice continua
(su X) se, data (xn)n ⊂ X con limh→∞
xh = x (in X) =⇒ limh→∞
T (xh) =
T (x) (in Y ).
Teorema 4.1.1 (delle contrazioni o del punto fisso, di Banach - Caccioppoli). Sia
(X, d) uno spazio metrico completo e sia T : X −→ X. Supponiamo che T sia una
contrazione, cioe ∃α ∈ (0, 1) tale che
(C) d (T (x), T (y)) ≤ α · d(x, y) ∀x, y ∈ X
Allora esiste un unico punto fisso x ∈ X tale che T (x) = x.
Dimostrazione: Dimostriamo prima l’unicita e poi l’esistenza.
Unicita
Supponiamo per assurdo che esistano due punti fissi x, x∗ ∈ X tali che x 6= x∗ e
(1) T (x) = x
(2) T (x∗) = x∗
Dalla (C), abbiamo che
d(x∗, x)(1)+(2)
= d (T (x∗), T (x)) ≤ α · d(x∗, x)
da cui segue che
(1− α) · d(x∗, x) ≤ 0
Poiche α 6= 1 e, in particolare, α < 1, possiamo dividere ambo i membri della disugua-
glianza per (1− α) > 0, ottenendo
d(x∗, x) ≤ 0
Ma d ≥ 0 per definizione, quindi in definitiva
d(x∗, x) = 0
82

4.1 Cenni sugli spazi metrici
Utilizzando la proprieta (d1), ne segue che x∗ = x, assurdo per le ipotesi fatte. Questo
prova la tesi.
Esistenza
Fissiamo x0 ∈ X e definiamo una successione (xh)h ∈ X per ricorrenza nel modo
seguente:x0 + x0 per h = 0x1 + T (x0) per h = 1x2 + T (x1) per h = 2...xh+1 + T (xh) (?)
Proviamo che (xh)h e convergente, cioe ∃x ∈ X tale che
(1) ∃ limh→∞
xh = x (in X)
Per provare la (1), basta provare che (xh)h e una successione di Cauchy(1) in (X, d),
cioe ∀ ε > 0 ∃h tale che
d(xh, xk) < ε ∀h, k > h
Osserviamo che
d(xh+1, xh)(?)= d (T (xh), T (xh−1))
(C)
≤ α · d(xh, xh−1) =
= α · d (T (xh−1), T (xh−2)) ≤ α2 · d(xh−1, xh−2) == . . . // . . . ≤ αh · d(x1, x0)
ossia
(2) d(xh+1, xh) ≤ αh · d(x1, x0) ∀h ∈ N
Siano k, h ∈ N, k < h. Vale
d(xk, xh)(d3)
≤h−1∑
i=k
d(xi+1, xi)(2)
≤h−1∑
i=k
αi · d(x1, x0) = d(x1, x0)h−1∑
i=k
αi(2)
=
= d(x1, x0)αk − αh1− α ≤ d(x1, x0)
αk
1− αDunque abbiamo provato che
(1)Infatti, in uno spazio metrico completo, una successione e convergente se e solo se e di Cauchy.(2)E una serie geometrica.
83

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
(3) d(xk, xh) ≤ d(x1, x0)
1− α αk −→k→∞
0 ∀h > k
Quindi, ∀ ε > 0 ∃h = h(ε) tale che
(4) d(xk, xh) < ε ∀h > k > h
o, in altre parole, ∀ ε > 0 riusciamo sempre a trovare il piu piccolo h (perche d(x1, x0)1−α αk −→
k→∞0) per cui
d(xh, xh) ≤ d(x1, x0)
1− α αh < ε
e di conseguenza prendendo qualsiasi h > k > h, si verifica la (4).
Avendo provato la (1), proviamo che x e un punto fisso di T per completare la
dimostrazione. Da (1) segue che anche la successione (xh+1)h e convergente a x ∈ X,
poiche e una successione estratta da (xh)h. Inoltre, poiche T e lipschitziana con costante
di Lipschitz α < 1 e ogni funzione lipschitziana e continua, T e continua. D’altra parte,
dalla (?) segue che (utilizzando la continuita di T ):
xh+1 = T (xh)
−→ −→
x = T (x)
�
Con l’idea di applicare il Teorema del punto fisso allo spazio di funzioni C0([a, b]),
consideriamo il seguente lemma.
Lemma 4.1.1.
(i) Sia f ∈ C0([a, b]) con a, b ∈ R, a < b, e definiamo
||f ||∞ + maxx∈[a, b]
|f(x)| ∈ [0, +∞)
(esiste per il teorema di Weierstrass). Allora ||·||∞ e una norma in C0([a, b]).
(ii) Siano f, g ∈ C0([a, b]). Definiamo
d(f, g) + ||f − g||∞
Allora(C0([a, b]), d
)e uno spazio metrico completo.
84

4.1 Cenni sugli spazi metrici
Dimostrazione:
(i) Le proprieta
(N1) ||f ||∞ = 0 ⇐⇒ f ≡ 0 su [a, b]
(N2) ||λf ||∞ = |λ| · ||f ||∞ ∀ f, g ∈ C0([a, b])
sono banali. La proprieta
(N3) ||f + g||∞ ≤ ||f ||∞ + ||g||∞ f, g ∈ C0([a, b])
discende dalla disuguaglianza triangolare per la norma | · | in R.
(ii) Dobbiamo provare che, data (fh)h ⊂(C0([a, b]), d∞
)successione di Cauchy,
esiste f ∈ C0([a, b]) tale che
limh→∞
d∞(fh, f) + limh→∞
||fh − f ||∞ = 0
Per ipotesi (fh)h e di Cauchy, cioe ∀ ε > 0 ∃h = h(ε) ∈ N tale che
(1) ||fh − fk||∞ < ε ∀ k > h > h
Dalla (1) e dalla definizione di norma a∞, segue che ∀ ε > 0 ∃h = h(ε) ∈ Ntale che
(2) |fh(t)− fk(t)| < ε ∀ k > h > h, ∀ t ∈ [a, b](3)
Fissiamo t ∈ [a, b] e consideriamo la successione (fh(t))h ⊂ (R, | · |). Dalla
(2) discende che (fh(t))h e una successione di Cauchy in (R, | · |), che sappia-
mo essere uno spazio metrico completo. Dunque (poiche ogni successione di
Cauchy e convergente in uno spazio metrico completo),
∃ limh→∞
fh(t) + f(t) (in R)
Abbiamo quindi costruito una funzione f : [a, b] −→ R tale che
f(t) + limh→∞
fh(t) (in R)
Per concludere, basta provare che
(3) Dalla definizione otteniamo in realta che maxt∈[a, b]
|fh(t)− fk(t)| < ε. Ma se tale proprieta vale per il
massimo, allora vale anche per ogni t.
85

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
(3) f ∈ C0([a, b])
(4) ||fh − f ||∞ −→h→∞
0
Fissiamo h nella (2) e facciamo tendere k →∞, ottenendo che ∀ε > 0 ∃h =
h(ε) ∈ N tale che
(5) |fh(t)− f(t)| ≤ ε ∀h > h, ∀ t ∈ [a, b]
In altre parole, f e uniformemente(4) vicina ad una funzione fh continua per
ipotesi. Proviamo ora che, fissato t0 ∈ [a, b], f e continua in t0, cioe
∃ limt→t0
f(t) = f(t0)
Fissati t, t0 ∈ [a, b], ∀h ∈ N vale che
(6) |f(t)− f(t0)| =∣∣(f(t)− fh(t)
)+(fh(t)− fh(t0)
)+(fh(t0)− f(t0)
)∣∣ ≤|f(t)− fh(t)|+ |fh(t)− fh(t0)|+ |fh(t0)− f(t0)|
Dalla (5) e dalla (6) segue che, fissato ε > 0, ∃h = h(ε) tale che
(7) |f(t)− f(t0)| ≤ 2ε+ |fh(t)− fh(t0)| ∀h > h, ∀ t, t0 ∈ [a, b]
Scegliendo h∗ = h+1, dalla continuita di fh∗ in t0 segue che, ∀ ε > 0, ∃ δ0 > 0
tale che
(8) |fh∗(t)− fh∗(t0)| < ε ∀ t ∈ (t0 − δ0, t0 + δ0) ∩ [a, b]
Da (7) + (8), concludiamo che ∀ t0 ∈ [a, b], ∀ε > 0 ∃δ0 = δ0(ε, t0) > 0 tale
che
|f(t)− f(t0)| ≤ 3ε ∀ t ∈ (t0 − δ0, t0 + δ0) ∩ [a, b]
def
⇐⇒
∃ limt→t0
f(t) = f(t0)
(4)Nel senso che h non dipende da t.
86

4.2 ODEs
La proprieta (4) segue banalmente dalla (5).
�
Osservazione 4.1.1. In(C0([a, b]), d
)fallisce la proprieta che, data (fh)h una suc-
cessione limitata, esiste una sua sottosuccessione convergente (teorema di Bolzano-
Weierstrass).
4.2 ODEs
Esempio (II Legge della Dinamica di Newton). La II Legge della Dinamica e spesso
espressa nella forma
(IILN) F = ma
Tuttavia, e possibile anche una sua formalizzazione tramite le ODEs(5):
x = x(t) =⇒ ..x =
∂2x
∂t2=⇒ F (t, x,
.x) = m
..x
In R3, x(t) = (x1(t), x1(t), x3(t)) descrive il vettore posizione di un punto materiale di
massa m, mentre F : R3 −→ R3 e la forza applicata al punto stesso. Se ad un certo
istante t0 x(t0) = P0, qual’e l’espressione di x(t) (t > t0)?
In tal caso, (IILN) e equivalente al sistema di 3 ODEs in 3 incognite
m..x1 = F1(t, x,
.x)
m..x2 = F2(t, x,
.x)
m..x3 = F3(t, x,
.x)
Restringiamoci, per il momento, allo studio di un’equazione differenziale ordinaria
di ordine n in forma normale, cioe
(E) x(n) = f(t, x, x′, . . . , xn−1
)
dove f : A ⊆ Rn+1 −→ R continua, A aperto, x : I −→ R, I intervallo di R.
(5)“ODE(s)” = “Ordinary Differential Equation(s)”, abbreviate anche “EDO” in italiano (“Equazioni
Differenziali Ordinarie”)
87

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
Esempio (Equazione del pendolo). L’equazione del pendolo semplice e un’equazione
del secondo ordine non lineare, nella forma
..ϑ = −ω2 sin(ϑ)
La sua soluzione - ovviamente - non e banale a causa della non linearita.
Definizione 4.2.1 (di soluzione di (E)). Si chiama soluzione di (E) una funzione
x = x(t) ∈ Cn(I) dove I ⊆ R e un intervallo tale che
(S1)(t, x(t), x′(t), . . . , xn−1(t)
)∈ A ∀t ∈ I
(S2) x(n)(t) = f(t, x(t), x′(t), . . . , xn−1(t)
)∀t ∈ I
Una soluzione di (E) si dice anche curva integrale di (E).
Problema: determinare l’integrale generale di (E), cioe l’insieme delle soluzioni di (E).
4.2.1 Caso n = 1
Restringiamoci per il momento alle ODEs del I ordine, ossia consideriamo il caso n = 1.
L’equazione (E) si riduce a
(E) x′ = f (t, x)
Definizione 4.2.2 (di soluzione di (E) per n = 1). Si chiama soluzione di (E) una
funzione x = x(t) ∈ C1(I) dove I ⊆ R e un intervallo tale che
(S1) (t, x(t)) ∈ A ∀t ∈ I
(S2) x′(t) = f (t, x(t)) ∈ A ∀t ∈ I
Una soluzione di (E) si dice anche curva integrale di (E).
Abbiamo gia considerato il caso in cui l’equazione (E) e lineare, cioe
f(t, x) = a(t) · x+ b(t)
dove a, b ∈ C0(I) assegnati, I ⊆ R fissato. a, b sono anche detti coefficienti dell’equa-
zione. In tal caso, vale il seguente teorema.
88

4.2 ODEs
Teorema 4.2.1. Siano a, b ∈ C0(I) assegnati su un fissato intervallo I ⊆ R, e siano
t0 ∈ I, x0 ∈ R tali che (t0, x0) ∈ A. Il Problema di Cauchy (o problema ai valori
iniziali) e della forma
(PC)
x′ = f(t, x) (equazione differenziale)
x(t0) = x0 (condizione iniziale)
dove f(t, x) = a(t) · x+ b(t). Allora x : I −→ R e soluzione di (PC) se e solo se
x(t) = ϕ(t) · (x0 + ρ(t)) , t ∈ I
dove
ϕ(t) + e∫ tt0a(s)ds
ρ(t) +∫ t
t0
b(s)
ϕ(s)ds
Osservazione 4.2.1 (importante). Le soluzioni di (PC) soddisfano le seguenti pro-
prieta:
(i) assegnati i coefficienti a, b ed i dati iniziali, vi e un’unica soluzione globale di
(PC), cioe la soluzione x : A −→ R e definita dove sono definiti i coefficienti
a, b;
(ii) la soluzione di (PC) puo essere rappresentata in modo esplicito rispetto ai
coefficienti e ai dati iniziali.
Consideriamo ora il caso piu generale
(PC)
{x′ = f(t, x) (equazione (E))
x(t0) = x0 (condizione iniziale (CI))
dove f e una funzione C1 generica. La soluzione di (PC) esiste? E se esiste, e unica
come nel caso lineare?
Per rispondere, enunciamo il seguente (fondamentale) teorema.
Teorema 4.2.2 (di esistenza ed unicita locale di (PC), Cauchy - Lipschitz). Siano
A ⊆ R2 aperto, f ∈ C1(A) e (t0, x0) ∈ A assegnato. Allora esiste un’unica soluzione
di (PC) definita su un intervallo (t0 − δ0, t0 + δ0)
x : (t0 − δ0, t0 + δ0) −→ R (δ0 ∈ R)
89

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
Dimostrazione: Dividiamo la dimostrazione del teorema in tre passi.
Passo 1. Sia δ > 0 (arbitrario). Allora
x : [t0 − δ, t0 + δ] −→ R e soluzione di (PC)
m
x ∈ C0([t0 − δ0, t0 + δ0])
Gx ⊆ A(6)
(EqInt) x(t) = x0 +
∫ t
t0
f(s, x(s))ds ∀ t ∈ [t0 − δ, t0 + δ]
Dimostrazione:
(⇓) Sia x : [t0 − δ, t0 + δ] −→ R soluzione di (PC). Per definizione,
x ∈ C1([t0 − δ, t0 + δ]) ⊂ C0([t0 − δ, t0 + δ])
Gx ⊂ A
Inoltre, sempre per definizione,
(E) x′(s) = f(s, x(s)) ∀ s ∈ [t0 − δ, t0 + δ]
Integrando l’equazione (E) su [t0, t], ∀ t ∈ [t0 − δ, t0 + δ], otteniamo che:
∫ t
t0
x′(s)ds =
∫ t
t0
f(s, x(s))ds
=
x(t)− x(t0)
(CI)
=
x(t)− x0
cioe
x(t) = x0 +
∫ t
t0
f(s, x(s))ds
(⇑) Sia x ∈ C0([t0 − δ, t0 + δ]) e supponiamo che
Gx ⊆ A(6)Ricordiamo che con la notazione Gx indichiamo il grafico di x.
90

4.2 ODEs
e
x(t) = x0 +
∫ t
t0
f(s, x(s))ds ∀t ∈ [t0 − δ, t0 + δ]
La proprieta Gx ⊆ A, dunque, e gratis. Anche la (CI) e banale, poiche
sostituendo t0 a t, otteniamo
x(t0) = x0 +���
������: 0∫ t0
t0
f(s, x(s))ds = x0
Osserviamo che la funzione
[t0 − δ, t0 + δ] 3 s 7−→ f(s, x(s))
e continua (perche composizione di funzioni continue). Per il teorema
fondamentale del calcolo, quindi,
x ∈ C1([t0 − δ, t0 + δ]) e vale (E)
�
Passo 2. Esistono δ1, σ1 > 0 tali che
(?) R = [t0 − δ1, t0 + δ1]× [x0 − σ1, x0 + σ1] ⊂ A
e ∃L > 0 costante di Lipschitz tale che
|f(t, u)− f(t, v)| ≤ L|u− v| ∀{t ∈ [t0 − δ1, t0 + δ1]
u, v ∈ [x0 − σ1, x0 + σ1]
Dimostrazione: Essendo A aperto e (t0, x0) ∈ A, esistono δ1, σ1 > 0
tali che valga (?). Fissando (o “congelando”) t ∈ [t0 − δ1, t0 + δ1], la f
diventa funzione di una sola variabile. Quindi, se u, v ∈ [x0−σ1, x0 +σ1],
vale il teorema del valor medio di Lagrange (in una variabile), cioe
|f(t, u)− f(t, v)| =(∂f
∂x(t, z)
)· (u− v)
per un opportuno z compreso tra u e v. Inoltre, possiamo scrivere che
|f(t, u)− f(t, v)| =(∂f
∂x(t, z)
)· (u− v) ≤ max
R
∣∣∣∣∂f
∂x
∣∣∣∣ |u− v|
91

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
∀ t ∈ [t0 − δ1, t0 + δ1], ∀u, v ∈ [x0 − σ1, x0 + σ1]. Definendo
L + maxR
∣∣∣∣∂f
∂x
∣∣∣∣
segue la tesi.
�
Passo 3. Proviamo che, se 0 < δ0 < min
{δ1,
σ1
M,
1
L
}con M ≡ max
R|f |, allora
esiste un’unica soluzione x : (t0 − δ0, t0 + δ0) −→ R soluzione di (PC).
Dimostrazione: Definiamo
I0 + [t0 − δ0, t0 + δ0] e X +{x ∈ C0(I0) : ||x− x0||∞ ≤ σ1
}
Ricordiamo che, per definizione, se x ∈ C0(I0),
||x− x0||∞ + maxt∈I0|x(t)− x0|
Osserviamo inoltre che
x ∈ X ⇐⇒ Gx ⊆ R
Notando che
X ⊂(C0(I0), d∞
)
e un insieme chiuso (per costruzione), proviamo che (X, d∞) e uno spazio
metrico completo. Infatti, sia (xh)h ⊂ (X, d∞) una successione di Cauchy.
In particolare, (xh)h e una successione di Cauchy in(C0(I0), d∞
). Dal
lemma 4.1.1, segue che ∃x ∈ C0(I0) tale che
limh→∞
d∞(xh, x) = 0
Essendo X chiuso in(C0(I0), d∞
), x ∈ X. Definiamo l’applicazione
X 3 y 7−→ T (y)(t) + x0 +
∫ t
t0
f(s, y(s))ds, t ∈ I0
Proviamo che:
92

4.2 ODEs
(1) T : X −→ X
(2) T e una contrazione, cioe ∃α ∈ (0, 1) tale che
d∞ (T (y), T (z)) ≤ α · d∞(y, z) ∀ y, z ∈ X
Proviamo (1). Sia y ∈ X; vale
|T (y)(t)− x0| =∣∣∣∣��x0 +
∫ t
t0
f(s, y(s))ds−��x0
∣∣∣∣(7)
≤∣∣∣∣∫ t
t0
|f(s, y(s))|ds∣∣∣∣
Come osservato prima, poiche y ∈ X ⊂ C0(I0), vale che
y ∈ X ⇐⇒ Gy ⊆ R
Quindi, possiamo scrivere∣∣∣∣∫ t
t0
|f(s, y(s))|ds∣∣∣∣ ≤M |t− t0| ≤Mδ0 ≤ σ1
Dunque, vale che
||T (y)− x0||∞ ≤ σ1
ossia, per definizione di X, T (y) ∈ X. Da cio segue la tesi.
Proviamo (2), cioe che ∃α ∈ (0, 1) tale che
d∞ (T (y), T (z)) ≤ α · d∞(y, z) ∀ y, z ∈ X
Fissiamo y, z ∈ X. Allora
|T (y)(t)− T (z)(t)| =
∣∣∣∣��x0 +
∫ t
t0
f(s, y(s))ds−��x0 −∫ t
t0
f(s, z(s))ds
∣∣∣∣ =
=
∣∣∣∣∫ t
t0
(f(s, y(s))− f(s, z(s))
)ds
∣∣∣∣ ≤
≤∣∣∣∣∫ t
t0
∣∣∣f(s, y(s))− f(s, z(s))∣∣∣ds∣∣∣∣
Passo 2≤
≤∣∣∣∣∫ t
t0
∣∣∣L · (y(s)− z(s))∣∣∣ds∣∣∣∣
(8)
≤≤ L · |t− t0| · d∞(y, z) ≤ L · δ0 · d∞(y, z)
(7) Sia f una funzione di x. Definendo f+ = max{f, 0} ≥ 0 e f− = −min{f, 0} ≥ 0, abbiamo che
f = f+ − f− e |f | = f+ + f−. Se f e integrabile, allora (applicando la disuguaglianza triangolare):∣∣∣∣∫ f(x)dx
∣∣∣∣ =
∣∣∣∣∫ f+(x)dx−∫f−(x)dx
∣∣∣∣ ≤ ∣∣∣∣∫ f+(x)dx
∣∣∣∣+
∣∣∣∣∫ f−(x)dx
∣∣∣∣ =∫f+(x)dx+
∫f−(x)dx =
∫ (f+(x) + f−(x)
)dx =
∫|f(x)| dx
93

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
Per ipotesi, abbiamo che 0 < L · δ0 < 1, quindi definiamo
α + L · δ0
da cui segue la tesi. Da (1) + (2), applicando il teorema del punto fisso,
∃!x ∈ X tale che
T (x) = xdef⇐⇒ ∃x ∈ C0(I0) tale che
Gx ⊆ R
x0 +
∫ t
t0
f(s, x(s))ds = x(t)
∀ t ∈ I0. Dal Passo 1 segue la tesi.
�
�
Osservazione 4.2.2 (importante). Abbiamo provato l’esistenza e l’unicita (locale) di
(PC) nell’ipotesi che f ∈ C1(A)! Se f fosse soltanto C0, troveremmo invece un’infinita
di soluzioni!
Dalla dimostrazione, pero, si evince che vi e ancora l’esistenza ed unicita locale di
(PC) sotto le seguenti ipotesi:
(i) ∃R = [t0 − δ1, t0 + δ1]× [x0 − σ1, x0 + σ1] ⊂ A e ∃L > 0 tale che
|f(t, u)− f(t, v)| ≤ L · |u− v| ∀
t ∈ [t0 − δ1, t0 + δ1]
u, v ∈ [x0 − σ1, x0 + σ1]
(ii) f ∈ C0(R)
ossia f e lipschitziana.
Esempio.
(PC)
x′ = |x|x(t0) = x0
L’equazione non e lineare e |x| /∈ C1. Ma |x| e lipschitziana, quindi vale ancora il
teorema di esistenza ed unicita locale di (PC).
(8) |y(s)− z(s)| ≤ d∞(y, z) + maxX|y(s)− z(s)|
94

4.2 ODEs
Osservazione 4.2.3.
(i) Il teorema afferma l’esistenza e l’unicita di (PC) in un intervallo centrato
in t0 senza precisare l’ampiezza di δ0. In questo senso parliamo di soluzione
locale di (PC).
(ii) Si puo provare che, anche se
A ≡ R2, f ∈ C1(R2)
puo accadere che la soluzione x non sia definita su tutto R (Ex. 6, Foglio 7).
Inoltre, i dati iniziali influenzano il “tempo di vita” di x.
Esempio.
(PC)
x′ = x2
x(0) = x0 (x0 ∈ R)
x0 = 0
La soluzione e banalmente x(t) = 0.
x0 6= 0
Il problema - in questo caso - si puo risolvere col metodo delle variabili separate.
Possiamo infatti vederlo nella forma
(PC)
x′ = g(t) f(x)
x(0) = x0
dove g(t) = 1 e f(x) = x2. Separiamo le variabili e integriamo membro a membro,
osservando che, poiche x = x(t)⇒ dx = x′dt:
x′
f(x)= g(t) =⇒
∫ t
0
x′
f(x)dt =
∫ t
0g(t)dt =⇒
∫ x(t)
x0
dx
f(x)=
∫ t
0g(t)dt
da cui otteniamo
− 1
x(t)+
1
x0= t
Risolvendo per x, abbiamo infine
x(t) =x0
1− x0t
95

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
Esempio (Equazione di Riccati).
(PC)
x′(t) = x2 + t2
x(0) = x0 (x0 ∈ R)
In questo caso, siamo solo in grado di dire (grazie al Teorema di esistenza ed unicita
locale) che esiste localmente un’unica soluzione di (PC).
Osservazione 4.2.4 (Esercizio 3, Foglio 7). Siano A ⊆ R4, f ∈ C1(A), xi : (a, b) −→R (i = 1, . . . , k) soluzioni di (E). Allora vale che
Gx1 ∩Gx2 oppure Gx1 = Gx2
Teorema 4.2.3 (di esistenza ed unicita della soluzione massimale di (PC)). Nelle stesse
ipotesi del Teorema di esistenza ed unicita locale di (PC), esiste un’unica soluzione
massimale di (PC), ossia esiste un’unica xmax tale che:
(M1) Imax e un intervallo aperto e xmax : Imax −→ R e soluzione di (PC).
(M2) Se v : I −→ R con I intervallo di R e una qualunque soluzione di (PC), allora
I ⊆ Imax e v(t) = xmax(t) ∀t ∈ I.
Dimostrazione: Denoteremo con M l’insieme di tutte le soluzioni di (PC) definite
su intervalli aperti. Piu precisamente,
v ∈Mdef⇐⇒ v : Iv = (av, bv) −→ R e soluzione di (PC)
dove −∞ < av < bv < +∞. Grazie al Teorema di esistenza ed unicita locale di (PC),
sappiamo che M 6= ∅. Dall’osservazione precedente segue che, se v, w ∈M ,
(1) se Iv ∩ Iw 6= ∅ =⇒ v(t) = w(t) ∀t ∈ Iv ∩ Iw
Definiamo
a + inf{av : v ∈M } ∈ [−∞, +∞)
b + sup{bv : v ∈M } ∈ (−∞, +∞]
Definiamo Imax + (a, b). ∀t ∈ Imax fissato, esiste per costruzione v ∈ M tale che
t ∈ Iv = (av, bv). Definiamo quindi
xmax(t) + v(t) ∀t ∈ Imax
96

4.2 ODEs
notando che, per la (1), xmax : Imax −→ R e ben definita(9).
Proviamo che vale (M1). Per costruzione, Imax e aperto e (t, v(t)) = (t, xmax(t)) ∈A ∀ t ∈ Imax. Inoltre, se t ∈ Iv, x′max(t) = v′(t) = f(t, v(t)) = f(t, xmax(t)). Quindi,
xmax e banalmente soluzione di (PC).
Proviamo che vale (M2). Sia v : I −→ R una soluzione di (PC) con I ⊂ R intervallo
di estremi α, β. Per costruzione, I = (α, β) ⊂ (a, b) = Imax. Per concludere, basta
provare che
(2) {α, β} ∩ {a, b} = ∅
Supponiamo per assurdo che b = β. Allora, per definizione, (β, v(β)) ∈ A. Consideria-
mo il problema di Cauchy
(PC?)
{x′ = f(t, x)
x(β) = xβ
Per il teorema di esistenza e unicita locale di (PC), esiste un δ0 > 0 e un’unica soluzione
v? : (β − δ0, β + δ0) −→ R di (PC?). Definiamo v?? : (α, β + δ0) −→ R tale che
v?? =
{v(t) α < t ≤ βv?(t) β < t < β + δ0
Allora v?? e una soluzione di (PC) definita su un intervallo aperto, ma v?? /∈M . Poiche
per costruzione M e l’insieme di tutte le soluzioni di (PC) definite su intervalli aperti,
siamo giunti ad un assurdo. Quindi vale (M2).
�
Esempio. Riprendiamo l’esempio precedente
(PC)
x′ = x2
x(0) = x0
(9) Se t appartiene anche a Iw, dove w ∈ M qualunque, per la (1) v(t) = w(t), e quindi il valore di
xmax(t) non dipende dalla funzione v scelta.
97

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
Avevamo gia calcolato la soluzione al variare della condizione iniziale. Vediamo ora
come varia l’intervallo aperto I sul quale e definita la soluzione al variare di x0(10):
I =
R x0 = 0, x(t) = 0 ∀ t ∈ R(−∞, 1
x0
)x0 > 0, x(t) =
x0
1− tx0(1
x0, +∞
)x0 < 0, x(t) =
x0
1− tx0
Chiaramente, in questo caso, Imax = R e di conseguenza xmax = 0.
4.3 Sistemi di ODEs del primo ordine e ODEs di ordine
n
Sia A ⊆ Rn+1 aperto, e consideriamo fi : A −→ R continua (i = 1, . . . , n):
(SE)
x′1 = f1(t, x1, x2, . . . , xn)
x′2 = f2(t, x1, x2, . . . , xn)...
x′n = fn(t, x1, x2, . . . , xn)
dove (x1, x2, . . . , xn) sono le (funzioni) incognite del sistema.
Definizione 4.3.1. Si chiama soluzione di (SE) una famiglia di n funzioni
xi : I −→ R (i = 1, . . . , n)
con I ⊆ R intervallo tale che
(i) xi e derivabile ∀ i = 1, . . . , n
(ii) (t, x1(t), . . . , xn(t)) ∈ A ∀ t ∈ I
(iii)
x′1(t) = f1(t, x1(t), x2(t), . . . , xn(t))
x′2(t) = f2(t, x1(t), x2(t), . . . , xn(t))...
x′n(t) = fn(t, x1(t), x2(t), . . . , xn(t))
∀t ∈ I
(10) Se definissimo I =
(−∞, 1
x0
)per x0 < 0 e
(1
x0, +∞
)per x0 > 0, escluderemmo dal dominio il
valore t = 0, ossia la nostra condizione iniziale.
98

4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
Se prendiamo X(t) = (x1(t), x2(t), . . . , xn(t)), X : I −→ Rn, allora
(SE) F (t, X) = (f1(t, X), . . . , fn(t, X))
m
X ′ = F (t, X)
Dunque F : A ⊆ Rn+1 −→ Rn e il sistema (SE) di nODEs di trasforma nell’“equazione”
(SE∗) X ′ = F (t, X)
Fissato X0 = (x01, . . . , x
0n) ∈ Rn e preso t0 ∈ R tale che (t0, X
0) ∈ A, possiamo
considerare il problema di Cauchy per un sistema di ODEs del primo ordine:
(PCS)
{X ′ = F (t, X) (SE)
X(t0) = X0 (CI)
Vale allora il seguente teorema.
Teorema 4.3.1 (di esistenza ed unicita locale per sistemi di ODEs del primo ordine).
Siano A ⊂ Rn+1 un aperto, (t0, X0) ∈ A fissato, e F ∈ C1(A; Rn). Allora esiste un
intervallo (t0− δ0, t0 + δ0) in cui e definita un’unica soluzione (o curva integrale di F )
di (PCS).
Dimostrazione: (Si veda [Giu]).
�
Ritorniamo ad una ODE di ordine n, in forma normale:
(E) x(n) = f(t, x, x′, x′′, . . . , xn−1)
dove f : A ⊆ Rn+1 −→ R continua. Consideriamo il problema di Cauchy per (E):
(PCE)
{x(n) = f(t, x, x′, x′′, . . . , xn−1) (E)
x(t0) = x01, x
′(t0) = x02, . . . , x
(n−1)(t0) = x0n (CI)
dove (t0, x01, . . . , x
0n) ∈ A fissato. Vale il seguente corollario.
99

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
Corollario 4.3.1 (del teorema di esistenza e unicita locale per una ODE di ordine n in
forma normale). Siano A ⊂ Rn+1 un aperto, (t0, X0) ∈ A fissato, e f ∈ C1(A). Allora
esiste un intervallo (t0 − δ0, t0 + δ0) sul quale e definita un’unica soluzione di (PCE).
Dimostrazione: Consideriamo F : A −→ Rn definita nel modo seguente:
X = (x1, . . . , xn)
(?) F (t, X) =(x2, x3, . . . , xn, f(t, X)
)
Osserviamo che:
(i) se x : I −→ R e una soluzione di (PCE) allora, per la (E) e le (CI) di (PCE),
la curva integrale
X(t) =(x(t), x′(t), x′′(t), . . . , x(n−1)(t)
), t ∈ I
e una soluzione di (PCS) con F definita da (?);
(ii) se X : I −→ Rn e una soluzione di (PCS) con F data da (?), e X(t) =(x1(t), . . . , xn(t)
)e una soluzione di (PCS), allora
x + x1 : I −→ R
e una soluzione di (PCE).
Dalle osservazioni e dal teorema di esistenza ed unicita locale per sistemi di ODEs del
primo ordine, segue la tesi.
�
Osservazione 4.3.1. Ragionando come nel caso di una ODE del primo ordine, si puo
provare un teorema di esistenza ed unicita della soluzione massimale di (PCS). In
particolare, si ottiene un teorema di esistenza ed unicita della soluzione massimale di
(PCE).
100

4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
4.3.1 Sistemi di ODEs (del primo ordine) autonomi
Lo spunto fisico e il filo conduttore del nostro discorso sara da qui in poi l’equazione
del pendolo semplice
(EP) x′′ + ω2 sin(x) = 0(ω2 =
g
l
)
di cui vogliamo studiare il problema di Cauchy associato:
(PCEP)
x′′ + ω2 sin(x) = 0 (EP)
x(t0) = x1
x′(t0) = x2
Osserviamo subito che non esiste un integrale “esplicito” di (PCEP). Pertanto,
siamo interessati ad uno studio qualitativo globale della soluzione di (PCEP). In base
alla teoria introdotta sulle ODEs possiamo affermare che, comunque dati x1, x2 ∈R, ∃xmax : Imax −→ R soluzione di (PCEP).
Problema: tracciare un grafico qualitativo di xmax.
Abbiamo gia visto che (PCEP) puo essere trasformato in un sistema di ODEs del
primo ordine denotando con y + x′, e ottenendo di conseguenza
(SP)
{x′ = y
y′ = −ω2 sin(x)
Con la stessa notazione usata finora, possiamo definire
F (x, y) + (y, −ω2 sin(x))
per scrivere (SP) come
(SP) (x, y)′ = F (x, y)
Notiamo che (SP) non dipende dalla variabile t, come era accaduto finora con gli
altri sistemi. In tale senso, si dice autonomo. Piu precisamente, diamo la seguente
definizione.
Definizione 4.3.2.
(i) Una ODE di ordine n in forma normale si dice autonoma se e della forma
101

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
(E) x(n) = f(x, x′, . . . , x(n−1))
dove f : A ⊆ Rn −→ R.
(ii) Un sistema di ODEs (in forma normale) del primo ordine si dice autonomo
se e della forma
(S) X ′ = F (X)
dove X = (x1, . . . , xn) e F : A ⊆ Rn −→ Rn, cioe F non dipende da t.
Ci limiteremo a trattare nel seguito sistemi di ODEs con n = 1, 2, cioe
(n = 1)
(E) x′ = f(x)
(n = 2)
(S)
{x′ = f(x, y)
y′ = g(x, y)dove f, g : A ⊆ R2 −→ R assegnate
Osserviamo che, nel caso n = 2, una soluzione di (S) e una curva X : I −→ R2, con
I ⊆ R intervallo.
Nel caso del pendolo, abbiamo
(S) = (SP)
{x′ = y = f(x, y)
y′ = −ω2 sin(x) = g(x, y)
Osservazione 4.3.2 (Proprieta di un sistema autonomo - Esercizio 9, Foglio 7).
(1) Se X = (x, y) : R −→ R2 e una soluzione di (S), allora anche la curva Xc :
R −→ R2 (con c costante fissata) definita
Xc(t) = (x(t+ c), y(t+ c))
e ancora una soluzione di (S) (grazie all’indipendenza da t!).
(2) Se (x0, y0) ∈ R2 e una soluzione del sistema algebrico
(?)
f(x, y) = 0
g(x, y) = 0
102

4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
allora la curva X : R −→ R2 definita
X(t) + (x0, y0), t ∈ R
e una soluzione di (S). Infatti, poiche x0 e y0 sono costanti, si ha banalmente
X ′(t) = (x′(t), y′(t)) = (0, 0), e grazie a (?) anche F (X) = 0.
Definizione 4.3.3.
(i) Si chiama orbita o traiettoria del sistema (S) il sottoinsieme Γ di R2 tale che
Γ = X(I)
dove X : I −→ R2 e una soluzione di (S).
(ii) Le soluzioni del sistema algebrico (?) si chiamano punti critici o di equilibrio
del sistema (S). Le orbite del sistema (S) possono essere orientate pensando
di percorrerle nel verso crescente del tempo t.
Osservazione 4.3.3. Un’orbita Γ ⊆ R2 di una curva potrebbe essere rappresentata (o
indotta) da piu di una curva.
Esempio. x′ = y
y′ = −x
L’orbita Γ = {(x, y) ∈ R2 : x2 + y2 = 1} e rappresentata (o indotta) da tutte le curve
Xc : R −→ R2 del tipo
Xc(t) = (x = sin(t+ c), y = cos(t+ c)) , t ∈ R
con c ∈ R costante fissata.
Corollario 4.3.2 (del teorema di esistenza e unicita locale di (PC)). Siano A ⊆ R2
aperto, f, g ∈ C1(A). Allora per ogni punto (x0, y0) ∈ A esiste (localmente, in un
intorno) un’unica orbita Γ ⊂ A passante per il punto (x0, y0).
Dimostrazione: E una immediata conseguenza del teorema di esistenza e unicita
locale di (PC) per sistemi di ODEs del primo ordine.
�
103

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
4.3.1.1 Interpretazione cinematica
Il sistema (S) si puo anche interpretare da un punto di vista cinematico.
Nel piano xy, consideriamo il campo di vettori di componenti f(x, y) e g(x, y). Il
sistema (S) descrive il moto di una particella di posizione (x, y) e velocita (x′, y′), data
in ogni punto da (f(x, y), g(x, y)). Le orbite di (S) sono le traiettorie descritte dalla
particella, e i punti critici sono i punti di equilibrio (in cui il campo e nullo!).
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15
Figura 4.1: Campo di direzioni dato da (SP) con ω2 = 1.
Il piano xy e detto anche piano delle fasi. Nel caso (SP), e facile vedere che i punti
di equilibrio (o punti critici) sono dati da
(kπ, 0), k = 0, ±1, ±2, . . .
Pertanto la funzione x : R −→ R definita da
x(t) + kπ, t ∈ R, k fissato in Z
e una soluzione di (EP).
Osservazione 4.3.4. Puo accadere che due soluzioni si incrocino nel piano xt, perche
non e detto che abbiano la stessa velocita (hanno derivata prima di x differente).
104
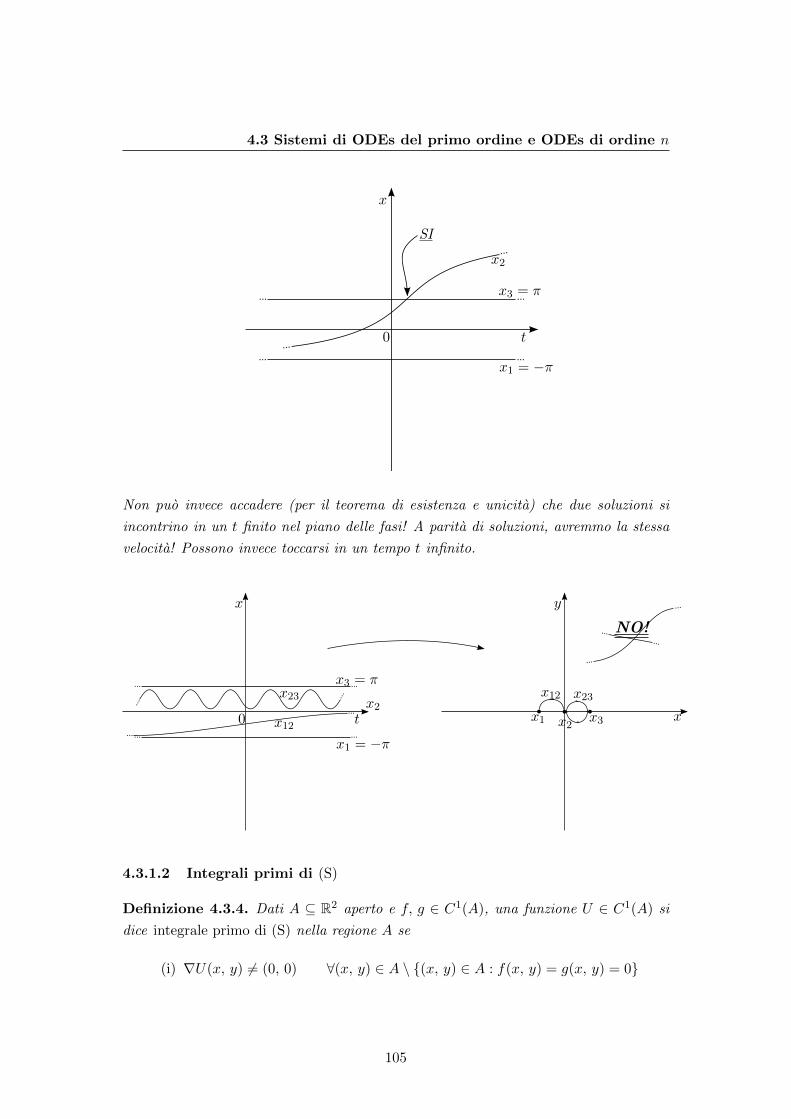
4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
t
x
0
x3 = π
x1 = −π
x2
SI
Non puo invece accadere (per il teorema di esistenza e unicita) che due soluzioni si
incontrino in un t finito nel piano delle fasi! A parita di soluzioni, avremmo la stessa
velocita! Possono invece toccarsi in un tempo t infinito.
t
x
0
x3 = π
x1 = −π
x2
x12
x23
x
y
x1 x2x3
x12 x23
NO!
4.3.1.2 Integrali primi di (S)
Definizione 4.3.4. Dati A ⊆ R2 aperto e f, g ∈ C1(A), una funzione U ∈ C1(A) si
dice integrale primo di (S) nella regione A se
(i) ∇U(x, y) 6= (0, 0) ∀(x, y) ∈ A \ {(x, y) ∈ A : f(x, y) = g(x, y) = 0}
105

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
(ii) Per ogni curva integrale X : I −→ R2 di (S), con I ⊆ R intervallo, vale
U(X(t)) = U(x(t), y(t)) = costante
Se in un sistema fisico l’energia si conserva, allora U ha proprio il significato di
energia. Le curve di livello Γc = {(x, y) ∈ A : U(x, y) = c} dove c ∈ R costante fissata,
si chiamano anche curve integrali di (S).
Osservazione 4.3.5 (Esercizio 9e, Foglio 7). Siano A ⊆ R2 aperto, f, g ∈ C1(A), e
U ∈ C1(A) tale che ∇U 6= (0, 0) ∀(x, y) ∈ A\{(x, y) ∈ A : f(x, y) = g(x, y) = 0}.Allora
U e un integrale primo di (S)
m
f(P0)∂U
∂x(P0) + g(P0)
∂U
∂y(P0) = 0 P0 ∈ A
Tale relazione e facilmente ricavabile osservando che, se ∇U 6= (0, 0), la condizione
che definisce un integrale primo e
(IP) U(x(t), y(t)) = costante
Differenziando (IP) abbiamo
x′(t0)∂U
∂x(P0) + y′(t0)
∂U
∂y(P0) = 0
e, usando (S),
f(P0)∂U
∂x(P0) + g(P0)
∂U
∂y(P0) = 0
Questa relazione puo anche essere vista nella forma
F (P0) • ∇U(P0) = 0
che appare piu intuitiva utilizzando l’interpretazione cinematica. L’orbita della par-
ticella e un vincolo dato da U , e quindi dal teorema delle funzioni implicite di Dini
sappiamo che ∇U e perpendicolare all’orbita. Poiche F , d’altro canto, e tangente al-
l’orbita (rappresenta la velocita!), ∇U e F sono perpendicolari, ossia il loro prodotto
scalare e nullo.
106

4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
Teorema 4.3.2. Sia A ⊆ R2 e sia U ∈ C1(A) un integrale primo di (S). Allora
(i) un’orbita Γ ⊂ A di (S) e contenuta in Γc per un’opportuna costante c ∈ R;
(ii) l’insieme delle curve di livello di U (cioe la famiglia Γc = {(x, y) ∈ A :
U(x, y) = c} al variare di c ∈ R) e costituito da un’unione (disgiunta) di
orbite di (S).
Dimostrazione:
(i) Sia Γ ⊆ A un’orbita di (S) passante per il punto (x0, y0), cioe Γ = X(I)
dove X : I −→ R2 e una soluzione di (S) e I ⊆ R un intervallo. Fissando U
integrale primo di (S), per definizione vale che
U(X(t)) = U(X(t0)) = U(x0, y0) + c, ∀ t ∈ I
Quindi Γ ⊆ Γc.
(ii) Sia c ∈ R e Γc 6= ∅ una curva di livello di U . Definiamo
ϑc = {Γ ⊆ Γc : Γ e un’orbita di (S)}
Dobbiamo provare che
Γc =⋃
Γ∈ϑcΓ
E banale provare che⋃
Γ∈ϑc Γ ⊆ Γc (gia provato al punto (i)). Proviamo
quindi che Γc ⊆⋃
Γ∈ϑc Γ. Per il teorema di esistenza e unicita locale di (PC),
otteniamo che ∀ (x0, y0) ∈ Γc, esiste ed e unica un’orbita Γ ∈ ϑc tale che
(x0, y0) ∈ Γ. L’unicita ci assicura che l’unione sia disgiunta.
�
Ritorniamo al problema di Cauchy da cui siamo partiti
(PCEP)
x′′ + ω2 sin(x) = 0 (EP)
x(t0) = x01
x′(t0) = x02
(CI)
107

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
e al suo sistema associato
(SP)
{x′ = y
y′ = −ω2 sin(x)
(x(t0) = x0
1
y(t0) = x02
)
Con l’intento di calcolare l’integrale primo di (SP) o, equivalentemente, di (EP), mol-
tiplichiamo ambo i membri di (EP) per la quantita ml2x′ ottenendo:(11)
ml2x′x′′ +mlA2x′g
Clsin(x) =
|=
d
dt
(1
2ml2(x′)2
)−mlg d
dt(cos(x))
|=
d
dt
(1
2m(lx′)2 −mgl cos(x)
)= 0
Definendo le quantita energia potenziale ed energia cinetica rispettivamente con
Ep + mgl(1− cos(x)), Ec +1
2m(lx′)2
e ponendo
E + Ep + Ec
la nostra equazione si riduce a
dE
dt= 0 =⇒ E = costante
Abbiamo appena ottenuto la ben nota legge di conservazione dell’energia. Utilizzando
le (CI), troviamo
(?)1
2m(lx′)2 −mgl cos(x) = c1 =
1
2m(lx0
2)2 −mgl cos(x01)
Dividendo (?) per ml2:
1
2(x′)2 − ω2 cos(x) = c =
1
2(x0
2)2 − ω2 cos(x01)
Possiamo quindi definire (ricordando che y = x′)
U(x, y) =y2
2− ω2 cos(x)
U e un integrale primo di (SP). Studiamo ora le sue curve di livello nel piano delle fasi.
(11)Ricordiamo che ω2 =g
l
108

4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
Siano A = R2, Γc = {(x, y) ∈ R2 :y2
2− ω2 cos(x) = c}. Dalla condizione che
descrive Γc, abbiamo c ≥ −ω2. Distinguiamo 4 casi.
Caso 1: c = −ω2
Da U , otteniamo
y2 = 2ω2(−1 + cos(x)) ⇐⇒ (x, y) = (2nπ, 0) n ∈ Z
Dunque Γc = {(2nπ, 0) : n ∈ Z}. Nel piano delle fasi:
x
y
(−2π, 0) (2π, 0)
Caso 2: −ω2 < c < ω2
Da U , otteniamo
y2 = 2(c+ ω2 cos(x)) =⇒ c+ ω2 cos(x) ≥ 0 ⇐⇒ cos(x) ≥ − c
ω2
Ora, esistono x1, x2 ∈ (−π, π) con −π < x1 < 0 < x1 < π tali che
cos(x) ≥ − c
ω2⇐⇒ x1 ≤ x ≤ x2
109
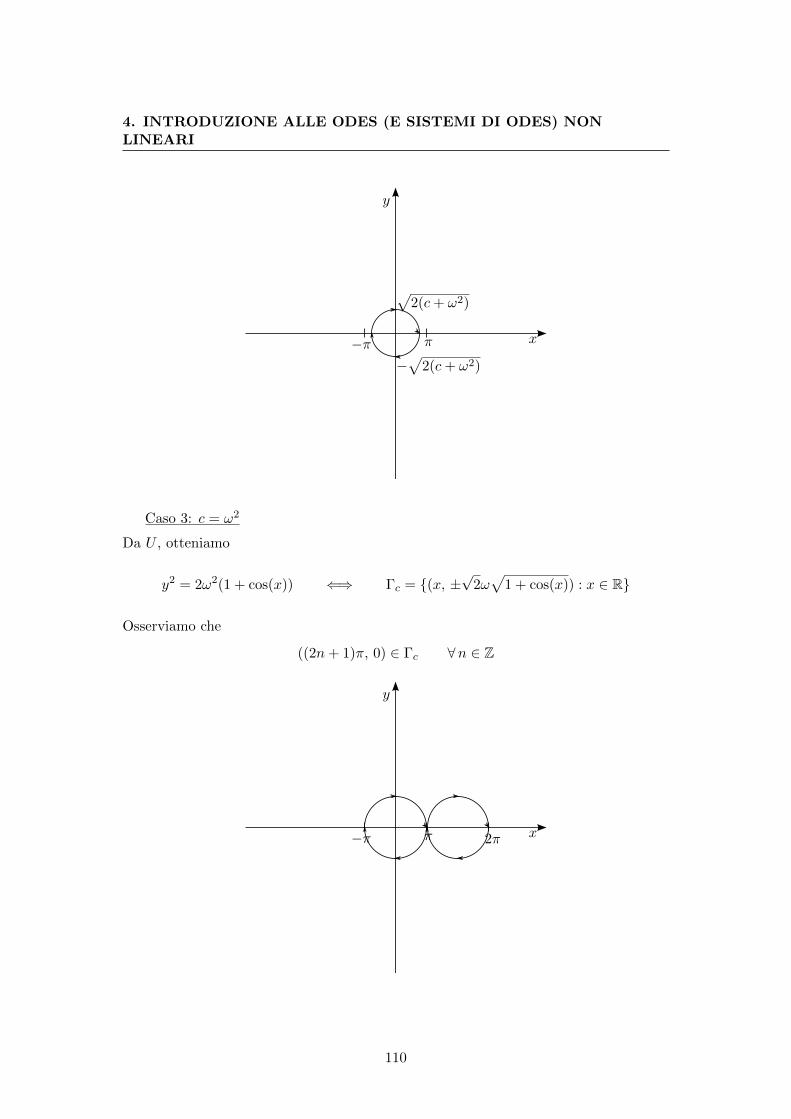
4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
x
y
−π π
√2(c+ ω2)
−√
2(c+ ω2)
Caso 3: c = ω2
Da U , otteniamo
y2 = 2ω2(1 + cos(x)) ⇐⇒ Γc = {(x, ±√
2ω√
1 + cos(x)) : x ∈ R}
Osserviamo che
((2n+ 1)π, 0) ∈ Γc ∀n ∈ Z
x
y
−π π 2π
110

4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
Caso 4: c > ω2
Da U , otteniamo
y2 = 2ω2(c+ cos(x)) =⇒ c+ ω2 cos(x) > 0 ∀x ∈ R
Γc = {(x, ±√
2√c+ ω2 cos(x)) : x ∈ R}
x
y
√2(c+ ω2)
−√
2(c+ ω2)
Vediamo ora i possibili grafici delle soluzioni nel piano tx per ogni caso.
Caso 1: c = −ω2
Le soluzioni sono della forma
x(t) = 2nπ n ∈ Z
In questo caso, abbiamo le cosiddette soluzioni di equilibrio:
111

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
t
x
0
x = 2π
x = −2π
Caso 2: −ω2 < c < ω2
La forma della soluzione e nella figura sottostante. Ma, a questo punto, sorge spontanea
la domanda: la soluzione e periodica? Cioe, ∃τ ∈ R ed esiste xmax : R −→ R soluzione
di (EP) tale che
x(t+ τ ) ∀ t ∈ R?
Si puo provare che, fissate le condizioni iniziali per cui
{x′′ + ω2 sin(x) = 0
x(t0) = x01, x′(t0) = x0
2
allora Imax ≡ R e xmax e periodica.
112
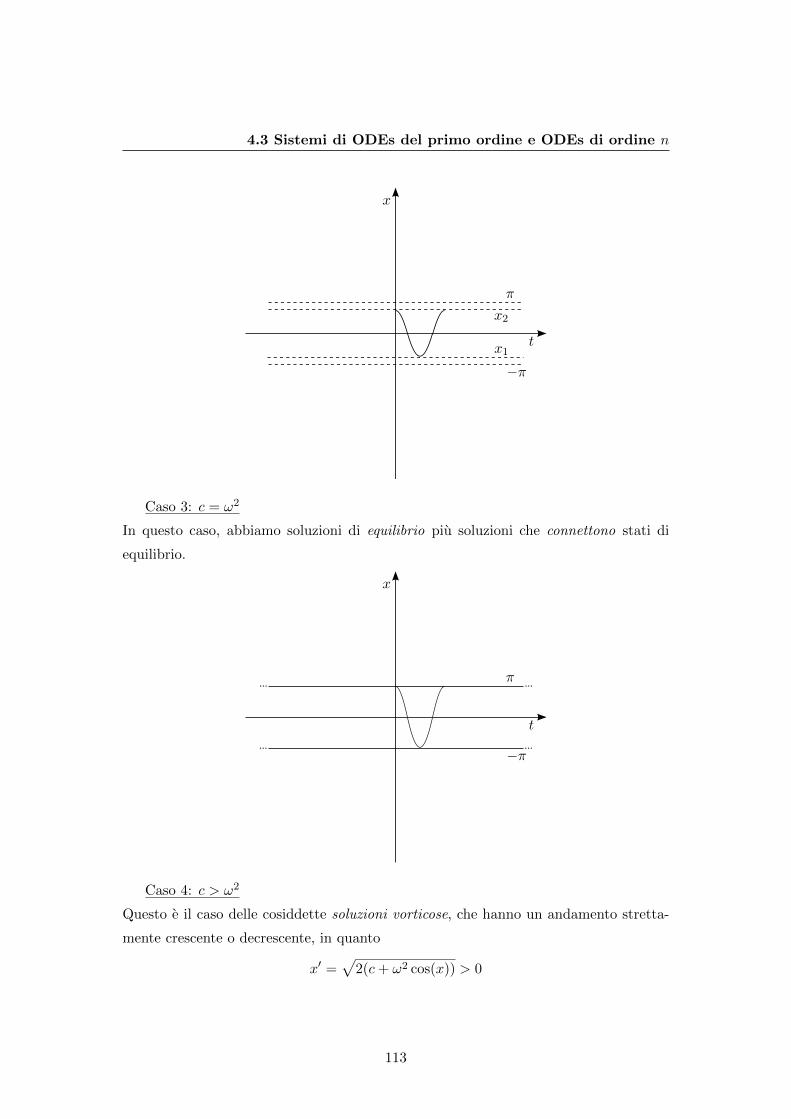
4.3 Sistemi di ODEs del primo ordine e ODEs di ordine n
t
x
π
−πx1
x2
Caso 3: c = ω2
In questo caso, abbiamo soluzioni di equilibrio piu soluzioni che connettono stati di
equilibrio.
t
x
π
−π
Caso 4: c > ω2
Questo e il caso delle cosiddette soluzioni vorticose, che hanno un andamento stretta-
mente crescente o decrescente, in quanto
x′ =√
2(c+ ω2 cos(x)) > 0
113

4. INTRODUZIONE ALLE ODES (E SISTEMI DI ODES) NONLINEARI
t
x
Riprendiamo ora il caso 2, in cui ci eravamo chiesti se la soluzione trovata si potesse
“estendere” ad una soluzione periodica. Ricordiamo innanzitutto la definizione.
Definizione 4.3.5. Una soluzione X = (x, y) : R −→ R2 di (S) si dice periodica se
∃τ ∈ R tale che
X(t+ τ ) ∀ t ∈ R
La periodicita della soluzione del caso 2 ci e garantita dal seguente teorema.
Teorema 4.3.3. Sia A ⊆ R2 aperto e sia U ∈ C1(A) un integrale primo di (S).
Definiamo, per un dato c > 0,
Γc + {(x, y) ∈ R2 : U(x, y) = c}
e supponiamo che
(i) Γc e una curva chiusa, regolare e semplice, cioe, per definizione,
• ∃ϕ : [a, b] −→ A di classe C1(A) e ϕ′(s) 6= (0, 0) ∀ s ∈ [a, b] (regolare)
• ϕ(a) = ϕ(b) (chiusa)
• ϕ : [a, b] −→ A e iniettiva (semplice)
(ii) Γc non contiene punti di equilibrio di (S)
Allora Γc e un’orbita periodica, cioe, per definizione, esiste X : R −→ R2 soluzione di
(S) periodica e Γc = X(R).
114

Capitolo 5
Serie di Fourier
Le pagine successive sono direttamente a cura del professore. Mi sono solo limitato ad
includerle in questo documento.
Versione: 20130823-083351
115

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE
TRIGONOMETRICHE)
1. Serie di Fourier
Si chiama serie di Fourier una serie formale del tipo
(1)a02
+
+∞∑
n=1
(an cos(nx) + bn sin(nx)) x ∈ R .
I numeri a0, an, bn ∈ R , n ∈ N si chiamano i coefficienti della serie.Si chiama polinomio trigonometrico (di ordine n) una funzione P : R→ R del tipo
P (x) = a0 +n∑
k=1
(ak cos(kx) + bk sin(kx))
dove a0, ak, bk ∈ R, k = 1, . . . , n (an · bn 6= 0).
Problema 1. Studiare al variare di x ∈ R la convergenza di (1).
1.1. Periodicita. Se (1) converge per x = x0 , allora converge in tutti i punti xk =x0+2kπ , k ∈ Z , alla stessa somma; dunque, se definiamo A = {x ∈ R | (1) converge}e f : A→ R ,
f(x) =a02
+∞∑
n=1
[an cos(nx) + bn sin(nx)] x ∈ R ,
ne segue che f e una funzione periodica di periodo 2π , cioe
f(x) = f(x+ 2π) ∀x ∈ A .
1.2. Una semplice condizione sufficiente per la convergenza. Una semplicecondizione sufficiente di convergenza per la (1) e la seguente.
Proposizione 1.1. Sia data una serie di Fourier di tipo (1) e supponiamo che
+∞∑
n=1
(|an|+ |bn|) < +∞ (come serie di numeri reali) .
Allora la (1) e (assolutamente) convergente.
Dimostrazione. Dobbiamo studiare la convergenza della serie a termini non negativi
|a0|2
+
+∞∑
n=1
|an cos(nx) + bn sin(nx)| .
Osserviamo che
|an cos(nx) + bn sin(nx)| ≤ |an cos(nx)|+ |bn sin(nx)| ≤ |an|+ |bn| ∀x ∈ R .
Dall’ipotesi segue che la serie converge assolutamente per ogni x ∈ R e quindiconverge. �
1
116
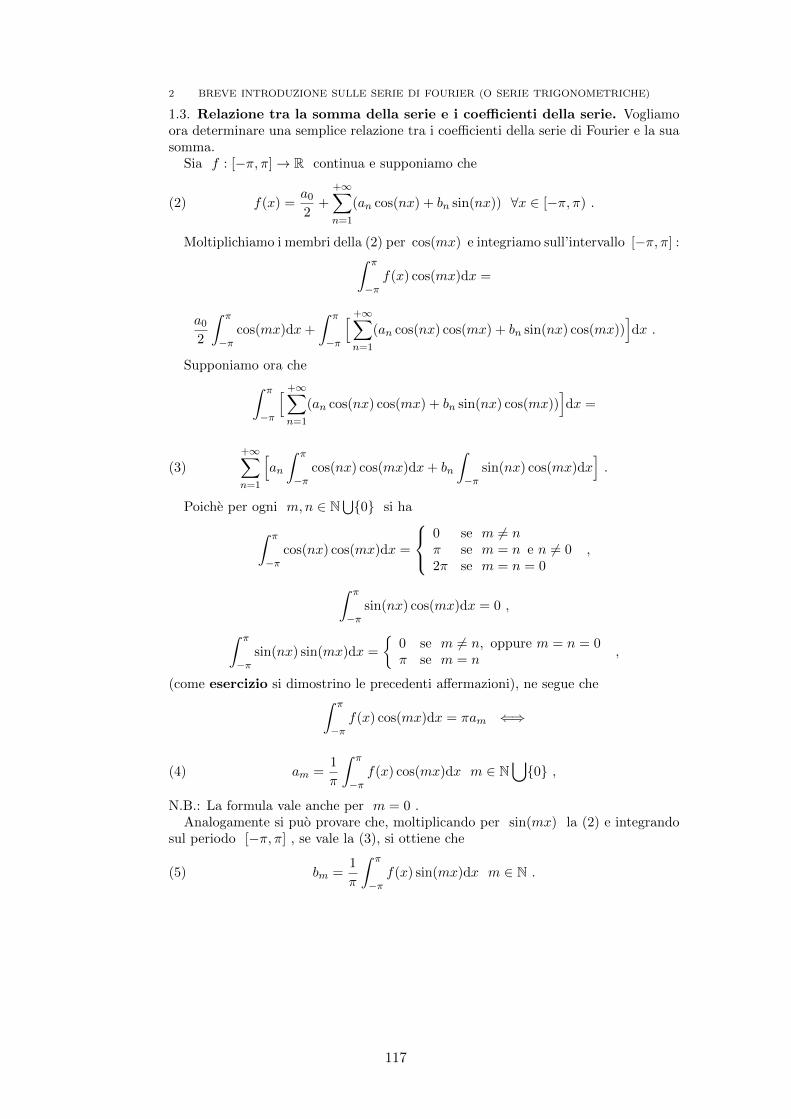
2 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
1.3. Relazione tra la somma della serie e i coefficienti della serie. Vogliamoora determinare una semplice relazione tra i coefficienti della serie di Fourier e la suasomma.
Sia f : [−π, π]→ R continua e supponiamo che
(2) f(x) =a02
+
+∞∑
n=1
(an cos(nx) + bn sin(nx)) ∀x ∈ [−π, π) .
Moltiplichiamo i membri della (2) per cos(mx) e integriamo sull’intervallo [−π, π] :∫ π
−πf(x) cos(mx)dx =
a02
∫ π
−πcos(mx)dx+
∫ π
−π
[ +∞∑
n=1
(an cos(nx) cos(mx) + bn sin(nx) cos(mx))]dx .
Supponiamo ora che
∫ π
−π
[ +∞∑
n=1
(an cos(nx) cos(mx) + bn sin(nx) cos(mx))]dx =
(3)+∞∑
n=1
[an
∫ π
−πcos(nx) cos(mx)dx+ bn
∫
−πsin(nx) cos(mx)dx
].
Poiche per ogni m,n ∈ N⋃{0} si ha
∫ π
−πcos(nx) cos(mx)dx =
0 se m 6= nπ se m = n e n 6= 02π se m = n = 0
,
∫ π
−πsin(nx) cos(mx)dx = 0 ,
∫ π
−πsin(nx) sin(mx)dx =
{0 se m 6= n, oppure m = n = 0π se m = n
,
(come esercizio si dimostrino le precedenti affermazioni), ne segue che∫ π
−πf(x) cos(mx)dx = πam ⇐⇒
(4) am =1
π
∫ π
−πf(x) cos(mx)dx m ∈ N
⋃{0} ,
N.B.: La formula vale anche per m = 0 .Analogamente si puo provare che, moltiplicando per sin(mx) la (2) e integrando
sul periodo [−π, π] , se vale la (3), si ottiene che
(5) bm =1
π
∫ π
−πf(x) sin(mx)dx m ∈ N .
117

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE) 3
Definizione 1.1. Data f : [−π, π] → R integrabile (secondo Riemann), le succes-sioni di numeri reali definite da (4) e (5) si chiamano i coefficienti di Fourier di fe la serie (1) cosı definita si chiama serie di Fourier associata a f . Scriveremo che
(6) f(x) ∼ a02
++∞∑
n=1
(an cos(nx) + bn sin(nx)) .
Fissato x ∈ R, denotiamo con Sn(f)(x) ≡ Sn(x) la somma parziale n-esima dellaserie di Fourier associata a f (valutata) nel punto x, cioe
(7) Sn(x) =a02
+n∑
k=1
[ak cos(kx) + bk sin(kx)] .
Osservazione 1. Con la scrittura (6) non intendiamo la (2)! Intendiamo solo che aduna funzione f : [−π, π]→ R integrabile (secondo Riemann) associamo la sua seriedi Fourier formale (1), senza assumere nessun tipo di convergenza.
1.4. Convergenza puntuale di una serie di Fourier.
Problema 2. Data f : R → R 2π-periodica, f : [−π, π] → R integrabile (secondoRiemann), se
f(x) ∼ a02
+
+∞∑
n=1
[an cos(nx) + bn sin(nx)]
allora e vero che
f(x) =a02
++∞∑
n=1
[an cos(nx) + bn sin(nx)] ∀x ∈ [−π, π] ?
Cioe , per definizione, esiste limn→∞ Sn(x) = f(x)?
Definizione 1.2.(i) Una funzione f : [a, b) → R (−∞ < a < b < +∞) si dice C0 a tratti se f econtinua in ogni punto x ∈ [a, b) eccetto al piu un numero finito di punti
a = x0 < x1 < x2 < · · · < xm−1 < xm = b
ed esistono finiti
limx→x+0
f(x) := f(x0+0), limx→x−i
f(x) := f(xi−0), limx→x+i
f(x) := f(xi+0), limx→x−m
f(x) := f(xm−0),
per ogni i = 1, . . . ,m− 1.(ii) Una funzione f : [a, b) → R (−∞ < a < b < +∞) si dice C1 a tratti se f ederivabile in ogni punto x ∈ [a, b) eccetto al piu un numero finito di punti
a = y0 < y1 < y2 < · · · < yk−1 < yk = b
ed f ′ : [a, b] \ {y0, y1, . . . , yk} → R e continua e limitata.(iii) Una funzione f : R→ R si dice C0 (C1) a tratti se per ogni −∞ < a < b < +∞,f : [a, b)→ R e C0 (C1) a tratti.
Osservazione 2. Ricordiamo che una funzione f : [a, b) → R limitata e continuain eccetto al piu un numero finito di punti e integrabile secondo Riemann (si lascia ladimostrazione per esercizio). In particolare una funzione f : [a, b) → R C0 a trattie integrabile (secondo Riemann).
118

4 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
Osservazione 3. Una funzione f : [a, b) → R C1 a tratti e C0 a tratti (si lascia ladimostrazione per esercizio).
Teorema 1.2 (Convergenza puntuale). Sia f : R → R 2π-periodica e C1 a tratti.
Definiamo la funzione f : R→ R
f(x) =1
2
[limy→x+
f(y) + limy→x−
f(y)].
Allora per ogni x ∈ R la serie di Fourier associata ad f converge e
f(x) =a02
++∞∑
n=1
[an cos(nx) + bn sin(nx)] x ∈ R .
6
-x
f(x)
qp−3π qp−π qpπ 3πp
Osservazione 4. Data f : R→ R, se f e continua in x allora
f(x) =1
2
[limy→x+
f(y) + limy→x−
f(y)]
=1
2[f(x) + f(x)] = f(x) .
Osservazione 5. La sola continuita di f (anche su tutto R ) non basta ad assicurarela convergenza della serie di Fourier.
Esempio 1. Sia f : R→ R la funzione definita da f(x) = x se x ∈ [−π, π) e poiestesa con periodicita 2π a tutto R. La funzione f e C1 a tratti (la dimostrazionee lasciata per esercizio).
119

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE) 5
6
-x
f(x)
�������p
−3π
�������p−π pπ
�������p
3π
�������p
5π
Allora
an =1
π
∫ π
−πf(x) cos(nx)dx =
1
π
∫ π
−πx cos(nx)dx = 0 , n ∈ N
⋃{0} ,
bn =1
π
∫ π
−πf(x) sin(nx)dx =
1
π
∫ π
−πx sin(nx)dx = − 2
ncos(nπ) = (−1)n+1 2
n, n ∈ N
(la dimostrazione e lasciata per esercizio). Quindi
f(x) ∼+∞∑
n=1
(−1)n+1 2
nsin(nx) .
Osserviamo che f verifica le ipotesi del Teorema 1.2; infatti f : (−π, π) → Re continua ed esistono limx→−π+ f(x) = −π , limx→π− f(x) = π , esiste f ′(x) =1 ∀x ∈ (−π, π) ed esistono limx→−π+ f ′(x) = limx→π− f ′(x) = 1 .
Per il Teorema 1.2 possiamo concludere che
f(x) = f(x) =
+∞∑
n=1
(−1)n+1 2
nsin(nx) ∀x ∈ (−π, π)
e
f(kπ) =1
2(f(−π+) + f(π−)) = 0 ∀k ∈ Z .
Esempio 2. Sia f : R → R la funzione definita da f(x) = x2 se x ∈ [−π, π) epoi estesa con periodicita π a tutto R .
120

6 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
6
-x
p−3π
p−π pπ 3π
p
Allora
an =1
π
∫ π
−πf(x) cos(nx)dx =
1
π
∫ π
−πx2 cos(nx)dx = 4
(−1)n
n2, n ∈ N ,
a0 =2
3π2 , bn = 0 , n ∈ N
(la dimostrazione e lasciata per esercizio). Quindi
f(x) ∼ π2
3+ 4
+∞∑
n=1
(−1)n
n2cos(nx) .
Osserviamo che f verifica le ipotesi del Teorema 1.2; infatti f : R→ R e continuae quindi esistono limx→−π+ f(x) = limx→π− f(x) = π2 ; inoltre esiste f ′(x) =2x ∀x ∈ (−π, π) ed esistono limx→−π+ f ′(x) = −2π , limx→π− f ′(x) = 2π .
Per il Teorema 1.2 possiamo concludere che
f(x) = f(x) =π2
3+ 4
+∞∑
n=1
(−1)n
n2cos(nx) ∀x ∈ [−π, π] .
Osserviamo inoltre che+∞∑
n=1
|an| ≤+∞∑
n=1
1
n2< +∞
e quindi la serie converge assolutamente.
Alcune conseguenze dell’esempio precedente:
(1) Se x = 0 allora 0 = f(0) = π2
3 + 4∑+∞
n=1(−1)nn2 e quindi
π2
12= −
+∞∑
n=1
(−1)n
n2=
+∞∑
n=1
(−1)n+1
n2= 1− 1
4+
1
9− 1
16+ ... .
(2) Se x = π , π2 = f(π) = π2
3 + 4∑+∞
n=1(−1)nn2 (−1)n = π2
3 + 4∑+∞
n=11n2 e quindi
π2
6=
+∞∑
n=1
1
n2.
121

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE) 7
(3)
π2
12+π2
6=
+∞∑
n=1
(−1)n+1
n2+
+∞∑
n=1
1
n2=
+∞∑
n=1
(−1)n+1 + 1
n2= 2
+∞∑
n=0
1
(2n+ 1)2,
da cui
π2
8=
+∞∑
n=0
1
(2n+ 1)2.
(4)
π2
24=π2
6− π2
8=
+∞∑
n=1
1
(2n)2.
Una nota storica relativa all’uguaglianzaπ2
6=
+∞∑
n=1
1
n2. Questa uguaglianza
e stata ottenuta, per la prima volta, nel 1735 dal grande matematico svizzero LeonhardEuler (noto in Italia come Eulero), nato a Basilea nel 1707 e morto a S. Pietroburgonel 1783. Eulero e stato, probabilmente, il piu grande virtuoso della manipolazionedi serie e il suo primo argomento per la prova dell’uguaglianza precedente e statouno dei suoi argomenti piu audaci, anche se poco rigoroso. In seguito, Eulero seppeprodurre anche un argomento rigoroso per la prova dell’uguaglianza. Vogliamo quiriproporre il primo argomento di Eulero per la prova dell’uguaglianza poiche , anchese non rigoroso, conserva ancora una grande efficacia intuitiva ed una intatta bellezzamatematica.
Sappiamo che
sinx = x− x3
3!+x5
5!− · · · =
∞∑
n=0
(−1)nx2n+1
(2n+ 1)!∀x ∈ R
e consideriamo l’equazione
(8)sin√x√
x= 1− x
3!+x2
5!− x3
7!+ · · · = 0 se x > 0 .
L’equazione (8) ha (infinite) radici date da
(9) x1 = π2, x2 = (2π)2, x3 = (3π)2, . . . , xn = (nπ)2, . . .
ma non x = 0, poiche limx→0
sin√x√
x= 1!
E’ ben noto che se un’equazione algebrica
1 + a1 x+ · · ·+ anxn = 0
ha radici x1, x2, . . . , xn, allora, per il teorema di Ruffini,
1 + a1 x+ · · ·+ anxn =
(1− x
x1
) (1− x
x2
). . .
(1− x
xn
)
(provarlo per esercizio). Inoltre e facile verificare che
(10)1
x1+
1
x2+ · · ·+ 1
xn= −a1 .
122

8 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
Assumendo che (10) continui a valere anche per il polinomio ”infinito” dell’equazione(8), segue che
1
x1+
1
x2+
1
x3+ · · ·+ 1
xn+ · · · = −
(− 1
3!
)=
1
6.
Sostituendo, nell’uguaglianza precedente, ad x1, x2, . . . . i valori in (9), si ottieneche
1
π2+
1
(2π)2+
1
(3π)2· · ·+ 1
(nπ)2+ · · · = 1
6.
Dunque abbiamo provato che
1 +1
22+
1
32+ · · ·+ 1
n2+ · · · = π2
6.
Ritorniamo alla dimostrazione del Teorema 1.2. Premettiamo, prima della suadimostrazione , alcuni importanti risultati preliminari.
Lemma 1.1 (Nucleo di Dirichlet). Vale la seguente formula
(11)1
2+ cos y + cos(2y) + · · ·+ cos(ny) =
sin((n+ 1
2) y)
2 sin(y2 ):= Dn(y)
per ogni y ∈ [−π, π] \ {0}, per ogni n ∈ N.
Dimostrazione. Per induzione su n. Se n = 0 la (11) si riduce all’identita1
2=
1
2.
Supponiamo (11), allora, utilizzano la formula di addizione del seno,
1
2+ cos y + cos(2y) + . . . cos((n− 1)y) + cos(ny) =
sin((n− 1
2) y)
2 sin(y2 )+ cos(ny) =
=sin((n− 1
2) y)
+ 2 sin(y2 ) cos(ny)
2 sin(y2 )=
sin (n y) cos(y2 ) + sin(y2 ) cos(ny)
2 sin(y2 )=
=sin((n+ 1
2) y)
2 sin(y2 ).
�Osservazione 6. Dalla (11) segue che
limy→0
Dn(y) = limy→0
sin((n+ 1
2) y)
2 sin(y2 )= n+
1
2.
Pertanto possiamo supporre che, fissato n ∈ N, Dn ∈ C0([−π, π]) definendo Dn(0) =n+ 1
2 . In particolare Dn : [−π, π]→ R e limitata.
Lemma 1.2 (Disuguaglianza di Bessel). Sia F : [−π, π] → R integrabile (secondoRiemann). Siano (an)n e (bn)n i coefficienti di Fourier associati ad F , cioe vale (6)con f ≡ F . Allora
(12)a202
+∞∑
n=1
(a2n + b2n) ≤ 1
π
∫ π
−πF (x)2 dx < ∞ .
123

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE) 9
Dimostrazione. Denotiamo con Sn(x) la successione in (7). Si ha, ovviamanente,(13)
0 ≤∫ π
−π(F (x)− Sn(x))2 dx =
∫ π
−πF (x)2dx− 2
∫ π
−πF (x)Sn(x)dx+
∫ π
−πSn(x)2dx
per ogni n ∈ N. Dalla definizione dei coefficienti di Fourier di f otteniamo che
(14)
∫ π
−πF (x)Sn(x)dx =
∫ π
−πF (x)
{a02
+n∑
k=1
[ak cos(kx) + bk sin(kx)]
}dx =
=a02
∫ π
−πF (x)dx+
n∑
k=1
[ak
∫ π
−πF (x) cos(kx)dx+ bk
∫ π
−πF (x) sin(kx)dx
]=
= π
(a202
+
n∑
k=1
(a2k + b2k)
).
Analogamente si prova
(15)
∫ π
−πSn(x)2dx = π
(a202
+
n∑
k=1
(a2k + b2k)
).
(la dimostrazione e lasciata per esercizio).Da (13), (14) e(15) segue che
a202
+
n∑
k=1
(a2k + b2k) ≤1
π
∫ π
−πF (x)2dx ∀n ∈ N .
Passano al limite per n → ∞ nella disuguaglianza precedente otteniamo la (12)(perche?). �
Osservazione 7. La disuguaglianza (12) non assicura che∞∑
n=1
(|an|+ |bn|) < ∞:
perche ?
Dal lemma 1.2 segue subito il seguente
Corollario 1.3 (Lemma di Riemann-Lebesgue). Nelle stesse ipotesi del Lemma 1.2segue che
limn→∞
an = limn→∞
bn = 0 .
Esercizio: Sia g : R→ R 2π-periodica, g : [−π, π)→ R integrabile (s.R.). Allora
∫ π+a
−π+ag(u) du =
∫ π
−πg(u) du ∀a ∈ R .
Dimostrazione Teorema 1.2. Fissato x ∈ R, denotiamo con Sn(f)(x) ≡ Sn(x) lasomma parziale n-esima della serie di Fourier associata a f , cioe la successione definitain (7).
124

10 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
Osserviamo che, dalla definizione di coefficiente di Fourier e dalla periodicita di f ,possiamo scrivere
Sn(x) =1
π
∫ π
−πf(t)
{1
2+
n∑
k=1
[cos(kt) cos(kx) + sin(kt) sin(kx)]
}dt
=1
π
∫ π
−πf(t)
{1
2+
n∑
k=1
cos(k(t− x))
}dt =
1
π
∫ π−x
−π−xf(u+ x)
{1
2+
n∑
k=1
cos(ku)
}du
=1
π
∫ π
−πf(u+ x)
{1
2+
n∑
k=1
cos(ku)
}du .
Dal Lemma 1.1 e dall’ Osservazione 6 segue allora la seguente rappresentazione inte-grale per Sn
(16) Sn(x) =1
π
∫ π
−πf(x+ t) Dn(t) dt ∀x ∈ R .
Tramite, ancora, il Lemma 1.1 segue che
(17)1
π
∫ π
0Dn(t) dt =
1
π
∫ 0
−πDn(t) dt =
1
2∀n ∈ N .
Da (16) e (17), fissato x ∈ R segue che
Sn(x)− f(x− 0) + f(x+ 0)
2=
1
π
∫ π
−πf(x+ t) Dn(t) dt− 1
π
∫ 0
−πf(x− 0) Dn(t) dt−
− 1
π
∫ π
0f(x+ 0) Dn(t) dt =
=1
π
∫ 0
−π(f(x+ t)− f(x− 0)) Dn(t) dt+
1
π
∫ π
0(f(x+ t)− f(x+ 0)) Dn(t) dt
=1
π
∫ 0
−π
f(x+ t)− f(x− 0)
2 sin(t/2)sin((n+ 1/2)t) dt+
1
π
∫ π
0
f(x+ t)− f(x+ 0)
2 sin(t/2)sin((n+ 1/2)t) dt .
Da questa catena di uguglianze segue allora che(18)
Sn(x)−f(x− 0) + f(x+ 0)
2=
1
π
∫ 0
−πG(t) sin((n+1/2)t) dt+
1
π
∫ π
0G(t) sin((n+1/2)t) dt ,
dove la funzione G : [−π, π]→ R e definita da
G(t) :=
f(x+ t)− f(x− 0)
2 sin(t/2)se −π ≤ t < 0
0 se t = 0f(x+ t)− f(x+ 0)
2 sin(t/2)se 0 ≤ t < π
.
Supponiamo, per il momemto, che
(19) G e integrabile (secondo Riemann)
e proviamo la tesi. Da (18) e (19) segue che
(20) Sn(x)− f(x− 0) + f(x+ 0)
2=
1
π
∫ π
−πG(t) sin((n+ 1/2)t) dt =
125

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE) 11
=1
π
∫ π
−πG(t) cos(t/2) sin(nt) dt+
1
π
∫ π
−πG(t) sin(t/2) cos(nt) dt =
=1
π
∫ π
−πF1(t) sin(nt) dt+
1
π
∫ π
−πF2(t) cos(nt) dt
dove F1(t) := G(t) cos(t/2), F2(t) := G(t) sin(t/2). Applicando (19), dalle proprietadelle funzioni integrabili, segue che Fi (i = 1, 2) sono ancora integrabili su [−π, π];dal Corollario 1.3 segue allora la tesi se n→∞ nella (20).
Per concludere la dimostrazione dobbiamo provare la (19). Per l’ Osservazione 2,basta mostrare che G : [−π, π)→ R e limitata e continua, eccetto al piu un numerofinito di punti.
Consideriamo f : [x − π, x + π) → R per x ∈ R fissato. Essendo f : R → R C1 atratti, esistono
x− π = y0 < y1 < · · · < yk = x+ π
tale che esiste
(21) f ′ : [x− π, x+ π) \ {y0, y1, . . . , yk} → R continua e limitata.
Denotiamo con F : [−π, π)→ R la funzione definita da
F (t) :=
f(x+ t)− f(x− 0) se −π ≤ t < 00 se t = 0f(x+ t)− f(x+ 0) se 0 ≤ t < π
.
Per definizione di F e da (21) segue che
(22)F e continua in t = 0, ∃F ′ : [−π, π) \ {t0, t1, . . . , tk} → R continua e limitata,
dove ti := yi − x per i = 1, . . . , k.Da (22) segue F e continua eccetto al piu nei punti t = t0, . . . , tk ed esistono finiti
(23) limt→t−i
F (t) = F (ti − 0), limt→t+i
F (t) = F (ti + 0) .
Poiche
G(t) =F (t)
2 sin(t/2)t ∈ [−π, π) \ {0} ,
da (22) segue anche che
(24) G e continua in ogni punto t ∈ [−π, π) \ {0, t0, t1, . . . , tk},e da (23), se ti 6= 0 per qualche i = 0, . . . , k, allora esistono finiti
(25) limt→t−i
G(t) =F (ti − 0)
2 sin(ti/2), lim
t→t+iG(t) =
F (ti + 0)
2 sin(ti/2).
Proviamo ora che G e limitata (sull’intervallo [−π, π)). Da (24) e (25), basta provareche G e limitata in un intorno di 0.
Da (22) segue che non e restrittivo supporre che esistono 0 < δ < π e M > 0 taleche
F ∈ C0(−δ, δ)
126

12 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
e∃F ′ : (−δ, δ) \ {0} → R e |F ′(t)| ≤ M ∀t ∈ (−δ, δ) \ {0}
Per il teorema di Cauchy, per ogni t ∈ (−δ, δ) \ {0} esiste ξ compreso tra 0 e t taleche
G(t) =F (t)
2 sin(t/2)=
F (t)− F (0)
2 sin(t/2)− 2 sin(0/2)=
F ′(ξ)cos(ξ/2)
,
da cui segue
|G(t)| = | F′(ξ)
cos(ξ/2)| ≤ M
cos(δ/2)∀t ∈ (−δ, δ) \ {0}
e dunque la tesi. �
1.5. Serie di Fourier di funzioni pari e dispari. Ricordiamo che data f : R→ R ,
• f si dice pari se f(x) = f(−x) ∀x ∈ R ,• f si dice dispari se f(−x) = −f(x) ∀x ∈ R .
Vale allora la seguente
Proposizione 1.4. Sia f : R→ R 2π-periodica e supponiamo che f : [−π, π]→ Rsia integrabie (secondo Riemann). Sia
f(x) ∼ a02
++∞∑
n=1
[an cos(nx) + bn sin(nx)] .
Allora
(1) se f e pari allora bn = 0 , a0 = 2π
∫ π0 f(x)dx , an = 2
π
∫ π0 f(x) cos(nx)dx ∀n ∈
N ,(2) se f e dispari allora a0 = 0 , an = 0 , bn = 2
π
∫ π0 f(x) sin(nx)dx ∀n ∈ N .
Dimostrazione.
(1)
(26) bn =1
π
∫ π
−πf(x) sin(nx)dx =
1
π
[∫ 0
−πf(x) sin(nx)dx+
∫ π
0f(x) sin(nx)dx
]
e
(27)
∫ 0
−πf(x) sin(nx)dx =
∫ π
0f(−y) sin(−ny)dy = −
∫ π
0f(y) sin(ny)dy .
Dunque, da (26) e (27) segue che bn = 0 . Si ragiona nello stesso modoper provare che an = 2
π
∫ π0 f(x) cos(nx)dx .
(2) E lasciata per esercizio. �
1.6. Convergenza uniforme di una serie di Fourier. Abbiamo studiato la con-vergenza puntuale della serie di Fourier associata ad una funzione f : R → R2π-periodica, f : [−π, π]→ R integrabile (secondo Riemann), cioe
f(x) ∼ a02
++∞∑
n=1
[an cos(nx) + bn sin(nx)] .
In altre parole, definita la successione di funzioni
Sn(f)(x) =a02
+n∑
k=1
[ak cos(kx) + bk sin(kx)] n ∈ N ,
127

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE) 13
Sn(f) : R→ R polinomio trigonometrico di grado n , abbiamo studiato il problema:
•∃ limn→+∞
Sn(f)(x) =∼f (x) ∈ R per qualche x ∈ R ?
•∼f (x) = f(x) ?
Nelle applicazioni delle serie di Fourier e molto utile, alcune volte, considerare alposto della convergenza puntuale della successione di funzioni Sn(f) , una nozione diconvergenza ”globale” sull’intervallo [−π, π], gia incontrata nel teorema di esistenzaed unicita del problema di Cauchy di una EDO del I ordine, detta convergenzauniforme.
Definizione 1.3.(i) Siano −∞ < a < b < +∞. Una successione di funzioni continue fn : [a, b]→ R(n ∈ N) si dice che converge uniformemente ad una funzione f : [a, b]→ R (su [a, b])se esiste
(28) limn→∞
‖fn − f‖∞ = 0
dove ricordiamo ‖g‖∞ := supx∈[a,b] |g(x)|.(ii) Data f : R→ R 2π-periodica con f : [−π, π]→ R integrabile (secondo Riemann),si dice che la serie di Fourier indotta da f converge uniformemente ad f su [a, b] se lasuccessione di funzioni delle somme parziali definita in (7) Sn : [a, b] → R convergeuniformemente a f (su [a, b]).
Osservazione 8. Dalla definizione segue subito che, se una successione di funzionicontinue fn : [a, b]→ R (n ∈ N) converge uniformemente ad un funzione f : [a, b]→R, allora converge anche puntualmente ad f , cioe esiste limn→∞ fn(x) = f(x) perogni x ∈ [a, b]. Il viceversa e falso. Per esempio, si consideri l’esempio 1 sull’intervallo[0, 2π] ed il seguente Teorema 1.5: perche la successione delle somme parziali dellaserie di Fourier, associata ad f , non puo convergere a f uniformemente su [0, 2π] ?
Teorema 1.5. Sia fn : [a, b] → R (n ∈ N) una successione di funzioni continueconvergente uniformemente ad una funzione f : [a, b]→ R. Allora(i) f e continua;
(ii) limn→∞∫ ba fn(x)dx =
∫ ba f(x)dx.
Dimostrazione. Proviamo il punto (i). Per definizione, la successione (fn)n ⊂C0([a, b]). Proviamo che la successione (fn)n e di Cauchy in (C0([a, b]), ‖ · ‖∞). Peripotesi, per ogni ε > 0 esiste un n = n(ε) ∈ N tale che
(29) ‖fn − f‖∞ < ε ∀n > n .
Comunque scelti m > n > n, dalla (29), segue che
‖fm − fn‖∞ ≤ ‖fm − f‖∞ + ‖f − fn‖∞ ≤ 2 ε
e dunque, per definizione, (fn)n e di Cauchy in (C0([a, b]), ‖·‖∞). Essendo (C0([a, b]), ‖·‖∞) uno spazio metrico completo, esiste una funzione continua f∗ : [a, b] → R. Perconcludere la dimostrazione basta provare che
(30) f(x) = f∗(x) ∀x ∈ [a, b] .
La (30) segue subito dall’Osservazione 8 e dall’unicita del limite puntuale. Proviamoil punto (ii). Dalle proprieta dell’integrale segue che
128

14 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
∣∣∫ b
afn(x)dx−
∫ b
af(x)dx
∣∣ ≤∫ b
a|fn(x)− f(x)|dx ≤ (b− a) ‖fn − f‖∞
per ogni n ∈ N. Passando al limite per n → ∞ nella disuguaglianza precedenteotteniamo la tesi. �
Osservazione 9. La convergenza (solo) puntuale di una successione (fn)n ⊂ C0([a, b])verso una funzione f : [a, b]→ R non assicura sia la continuita di f che la convergenzadegli integrali. Infatti si consideri l’esempio dell’Osservazione 8: la successione dellesomme parziali e una sucessione di funzioni continue su [0, 2π], ma il limite puntualenon e continuo.
Per quanto riguarda la convergenza degli integrali si consideri la successione fn :[0, 1] → R, fn(x) = nx exp (−nx2). Provare che (fn)n converge puntualmente alla
funzione identicamente nulla f ≡ 0 su [0, 1] e limn→∞
∫ 1
0fn(x)dx =
1
2.
Vale il seguente criterio di convergenza uniforme di una serie di Fuorier, che enuncer-emo senza dimostrazione.
Teorema 1.6 (Convergenza uniforme). Sia f : R → R 2π-periodica, C1 a tratti.Allora la serie di Fourier associata ad f converge uniformemente ad f su ogniintervallo [a, b] in cui la funzione f(x) e continua.
Una immediata conseguenza del Teorema 1.5 (ii) e il seguente criterio di inte-grazione, termine a termine, per serie di Fourier.
Corollario 1.7. Sia f : R → R 2π-periodica con f : [−π, π] → R integrabile(secondo Riemann) e f(x) ∼ a0
2 +∑+∞
n=1(an cos(nx) + bn sin(nx)). Supponiamo che laserie di Fourier associata ad f converge uniformemente ad f su un fissato intervallo[a, b]. Allora, per ogni coppia x0, x ∈ [a, b],
∫ x
x0
f(t) dt =
∫ x
x0
a02dt+
+∞∑
n=1
[an
∫ x
x0
cos(nt)dt+ bn
∫ x
x0
sin(nt)dt
]
Dimostrazione. Sia Sn(x) =a02
+n∑
k=1
[ak cos(kx) + bk sin(kx)] n ∈ N. Per ipotesi la
successione (Sn)n converge uniformemente ad f su [a, b]. Applicando allora il Teorema1.5 (ii) otteniamo che
(31) limn→∞
∫ x
x0
Sn(t) dt =
∫ x
x0
f(t) dt .
Per la linearita dell’integrale
∫ x
x0
Sn(t) dt =
∫ x
x0
a02dt+
n∑
k=1
[ak
∫ x
x0
cos(kt)dt+ bk
∫ x
x0
sin(kt)dt
]
e dalla (31) segue subito la tesi. �
129

BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE) 15
1.7. Rappresentazione complessa delle serie di Fourier. Sia f : R → R 2π-periodica, continua e supponiamo che sia
f(x) ∼ a02
++∞∑
n=1
[an cos(nx) + bn sin(nx)] .
Supponiamo che
(32) f(x) =a02
+
+∞∑
n=1
[an cos(nx) + bn sin(nx)] ∀x ∈ [−π, π] .
Ricordando l’esponenziale complesso
e±iϑ = cosϑ± i sinϑ ,
otteniamo che
cosϑ =eiϑ + e−iϑ
2, sinϑ =
eiϑ − e−iϑ2i
∀ϑ ∈ R .
D’altra parte, si ha
Sn(f)(x) =a02
+n∑
k=1
[ak cos(kx) + bk sin(kx)] =
a02
+
n∑
k=1
[akeikx + e−ikx
2+ bk
eikx − e−ikx2i
]=a02
+
n∑
k=1
[ak − ibk
2eikx +
ak + ibk2
e−ikx].
Allora possiamo scrivere
Sn(f)(x) = c0 +n∑
k=1
[ckeikx + c−ke
−ikx] =n∑
k=−ncke
ikx ,
avendo posto c0 = a02 e per ogni k ∈ N , ck = 1
2(ak − ibk) , c−k = 12(ak + ibk) .
D’altra parte la (32) e equivalente a
limn→+∞
|f(x)− Sn(f)(x)| = 0 ∀x ∈ [−π, π] ,
che a sua volta e equivalente a
limn→+∞
∣∣∣f(x)−n∑
k=−ncke
ikx∣∣∣ = 0 ∀x ∈ [−π, π] ,
cioe, per definizione, a
f(x) =
+∞∑
k=−∞cke
ikx ∀x ∈ [−π, π] .
Per ogni n ∈ N possiamo esprimere i coefficienti cn e c−n tramite integrali,ottenendo che
c0 =a02
=1
2π
∫ π
−πf(x)dx =
1
2π
∫ π
−πf(x)ei0xdx ,
cn =an + ibn
2=
1
2
[1
π
∫ π
−πf(x)
einx + e−inx
2dx− i
π
∫ π
−πf(x)
einx − e−inx2i
dx
]=
130
16 BREVE INTRODUZIONE SULLE SERIE DI FOURIER (O SERIE TRIGONOMETRICHE)
1
2π
∫ π
−πf(x)e−inxdx .
Analogamente si ritrova che
c−n =1
2π
∫ π
−πf(x)einxdx
e dunque che
ck =1
2π
∫ π
−πf(x)e−ikxdx ∀k ∈ Z .
1.8. Cenno alle funzioni f : R → C . Sia f : R → C 2π-periodica, si possonoestendere tutti i concetti introdotti per funzioni f : R → R , ottenendo un analogorisultato di convergenza puntuale ed uniforme della serie di Fourier, tenendo presente
che il modulo di un numero complesso z = x+ iy e dato da |z| =√zz =
√x2 + y2
, dove z = x− iy e il complesso coniugato di z e la radice quadrata e intesa comeradice quadrata reale.
131

132

Bibliografia
[Con] Franco Conti. Calcolo. Teoria e applicazioni. McGraw-Hill, 1993.
[Giu] Enrico Giusti. Analisi Matematica 2 - Terza edizione interamente riveduta e ampliata.
Programma di Matematica, Fisica, Elettronica. Bollati Boringhieri, 2003.
[Gre] Gabriele H. Greco. Analisi Matematica Uno. UniversityInTn, 2012.
133





























