Embed Size (px)
Citation preview

Rozszerzony konspekt wykładów
z
ANALIZY MATEMATYCZNEJ
dla studentów
kierunku Mechatronika
opracowany przez prof. Bohdana Mochnackiego

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
1
CIĄGI LICZBOWE Definicja: Ciągiem liczbowym nazywamy zbiór wartości funkcji, której dziedziną są liczby naturalne ( )...,3,2,1 , ( )xfy = , Nx∈ . � Przykłady
Zdefiniowany w ten sposób ciąg jest ciągiem nieskończonym, bo liczb naturalnych jest nieskończenie wiele. W praktyce stosuje się inną konwencję zapisu ciągu. Aby podkreślić, Ŝe x przyjmuje wartości ze zbioru liczb naturalnych piszemy w tym miejscu n, natomiast zamiast y piszemy na (n-ty wyraz ciągu), czyli
( )nfan = � Przykłady. Ciągi z poprzedniego przykładu zapisujemy więc w postaci:
{ }{ }
⇒∈+
=
⇒∈=
⇒∈⋅=⇒∈+=
−
...,5
4,
4
3,
3
2,
2
1,
1
...,4
1,
3
1,
2
1,1,
1...,24,12,6,3,23
...,14,11,8,5,231
Nxx
xy
Nxx
y
Nxy
Nxxyx
1
123
231
+=
=
⋅=+=
−
n
na
na
a
na
n
n
nn
n

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
2
Czasami do zapisania ciągu wykorzystuje się tzw. wzory rekurencyjne
( )nn afa =+1
i w takim przypadku musimy podać wartość 1a pierwszego wyrazu ciągu.
� Przykład
{ }...,26,5,2,1,00,1 12
1 ⇒=+=+ aaa nn
Wzory rekurencyjne mogą być bardziej rozbudowane i zawierać kilka wyrazów poprzednich, ale wówczas na starcie trzeba podać równieŜ wartości większej liczby wyrazów początkowych.
Klasyfikacja ciągów
� Ciąg rosnący
011 >−⇒> ++ nnnn aaaa
� Ciąg malejący 011 <−⇒< ++ nnnn aaaa
� Ciąg niemalejący
011 ≥−⇒≥ ++ nnnn aaaa
� Ciąg nierosnący
011 ≤−⇒≤ ++ nnnn aaaa
� Ciąg oscylujący
Znak róŜnicy wyrazów sąsiednich zmienia się
� Ciąg stały 011 =−⇒= ++ nnnn aaaa
Przykłady ciągów przynaleŜnych do kolejnych grup pokazano na wykładzie.

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
3
Ciąg rosnący i malejący nazywane są ciągami ściśle monotonicznymi, a ciąg niemalejący i nierosnący - ciągami monotonicznymi. Badanie monotoniczności Badanie polega na oszacowaniu znaku wyraŜenia nn aa −+1 (ograniczymy się do ciągów ściśle monotonicznych) � Przykład Zbadać monotoniczność ciągu
Mamy
Tworzymy i przekształcamy róŜnicę
Pamiętamy przy tym, Ŝe n jest liczbą naturalną, czyli mianownik w wyraŜeniu końcowym jest z całą pewnością liczbą dodatnią. Granica ciągu WaŜnym problemem jest zbadanie do czego dąŜy n-ty wyraz ciągu, gdy n dąŜy do nieskończoności. Zadanie takie zapisujemy następująco
W praktyce mogą pojawić się dwa przypadki, a mianowicie
1+=
n
nan
( )( ) 2
1
11
1,
1 1 ++=
+++=
+= + n
n
n
na
n
na nn
( ) ( )( )( ) ( )( ) 0
12
1
12
21
12
1 2
1 >++
=++
+−+=+
−++=−+ nnnn
nnn
n
n
n
naa nn
nn
a∞→
lim
±∞==∞→∞→ n
nn
naga lim,lim

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
4
W przypadku pierwszym mówimy o granicy właściwej, a ciąg nazywamy zbieŜnym, a w drugim o granicy niewłaściwej i ciągu rozbieŜnym. Definicja granicy właściwej i niewłaściwej ciągu Granica właściwa:
co oznacza, Ŝe prawie wszystkie wyrazy ciągu mieszczą się w dowolnie małym otoczeniu granicy g - rysunek.
Na rysunku pokazano kilka wyrazów ciągu an = (n + 1)/n = 1 + 1/n. Intuicyjnie moŜemy ocenić, Ŝe granicą tego ciągu jest 1 i to odpowiada wynikowi poprawnemu. W epsilonowej odległości od granicy g = 1 stawiamy ,,murek''. Wyraz ciągu o wskaźniku N wejdzie na murek (dla ε= 1/10: N = 10, a dla ε= 1/100: N = 100), a wszystkie pozostałe wyrazy ,,wpadną'' do otoczenia między murkiem a granicą. Granicę niewłaściwą definiuje się następująco (rysunek)
εε
<−⇔= ∧∨∧>>∞→
gaga nNnN
nn 0
lim
g=1 a4 a2 a1
aN
ε wszystkie pozostałe wyrazy n > N
2
Eaa nNnNE
nn
>⇔∞±= ∧∨∧>>∞→ 0
lim
a6 a8 a1
aN
E
wszystkie pozostałe wyrazy

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
5
Na rysunku pokazano kilka wyrazów ciągu rozbieŜnego an = n2 -1. Tym razem ,,murek'' lub
,,zaporę'' stawiamy w bardzo duŜej odległości E od pierwszego wyrazu ciągu (np. E = 80). Mimo tego wyraz o wskaźniku N (dla E =80 będzie to w omawianym przykładzie wyraz a9 ) znajdzie się na zaporze, a wszystkie następne za zaporą. WaŜniejsze twierdzenia o granicach właściwych ciągów JeŜeli { } { } bbaa nn →→ , , to
baba nn +→+ }{ baba nn −→− }{
abba nn →}{ 0,/}/{ ≠→ bbaba nn
JeŜeli gcga nn →→ }{,}{ i rozpatrujemy taki ciąg }{ nb , Ŝe nnn cba ≤≤ , to ciąg }{ nb dąŜy równieŜ do g (twierdzenie o trzech ciągach). W jednej z ksiąŜek moŜna znaleźć analogiczne twierdzenie o policjantach i pijaku. Dwaj policjanci prowadzą między sobą pijaka. JeŜeli policjanci wejdą przez drzwi do izby wytrzeźwień, to przez te drzwi przejdzie równieŜ pijak. Sytuacja w twierdzeniu o trzech ciągach jest analogiczna. Kilka wzorów dotyczących granic ciągów MoŜna pokazać, Ŝe
Szczególnie waŜny jest wzór dotyczący liczby Eulera e (podstawy logarytmów naturalnych). Liczba e ma fundamentalne znaczenie w matematyce i naukach stosowanych.
0,1lim >=∞→
AAn
n
1lim =∞→
n
nn
71828.21
1lim ≈=
+∞→
en
n
n

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
6
W podręcznikach pokazuje się, Ŝe rozpatrywany ciąg jest rosnący i ograniczony od góry, czyli jest zbieŜny. Wydawać by się mogło, Ŝe jego granicą jest 1, ale nawet proste doświadczenie z wykorzystaniem kalkulatora pokazuje Ŝe tak nie jest. Rzeczywiście dla
10=n mamy 5937.21.1 1010 ==a , dla 100=n mamy 7408.201.1 100
100 ==a , a dla 1000=n mamy 7169.2001.1 1000
1000 ==a itd. Symbole nieoznaczone Przy obliczaniu granic ciągów napotykamy z reguły na wyraŜenia nazywane symbolami nieoznaczonymi. Ocena co się za nimi kryje, wymaga pewnych przekształceń matematycznych wzorów wyjściowych. � Przykłady
Wstawiając do tematu zadania nieskończenie wielką liczbę otrzymujemy symbol nieoznaczony (zaznaczony w nawiasie kwadratowym). Licznik i mianownik ułamka dzielimy przez
2n i wykorzystując twierdzenia o granicach właściwych ciągów otrzymujemy 3/2.
Uwaga: W pierwszej linijce wykorzystano przekształcony wzór skróconego mnoŜenia a w drugiej licznik i mianownik otrzymanego ułamka podzielono przez n.
2
3
002
00321
2
123
lim22
123lim
2
2
2
2
=++++=
++
++=
∞∞
++++
∞→∞→
nn
nnnn
nnnn
( ) [ ] =++
−+=∞−∞−+∞→∞→ nnn
nnnnnn
nn 2
222 limlim
2
1
11
1
1limlim
2=
++=
++ ∞→∞→
nnnn
nnn
BA
BABA
+−=−
22

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
7
Wstawiając nieskończenie wielką liczbę naturalną do ciągu Eulera otrzymujemy równieŜ symbol nieoznaczony, a w szczególności
∞1 . PROBLEMY ZWI ĄZANE Z PRAKTYCZNYMI ASPEKTAMI LICZENIA GRANIC CI ĄGÓW BĘDĄ OMAWIANE NA WYKŁADZIE I ĆWICZENIACH

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
8
SZEREGI LICZBOWE Definicja: Dany jest ciąg liczbowy }{ na . Na jego bazie budujemy nowy ciąg }{ nS taki, Ŝe
Otrzymany ciąg }{ nS nazywamy szeregiem liczbowym, a nS - jego n-tą sumą częściową. Wykorzystując ogólnie znany symbol sumowania szereg }{ nS zapisujemy w postaci
a jego n-tą sumą częściową jako
W pierwszej kolejności będą rozpatrywane szeregi o wyrazach dodatnich. Mówimy, Ŝe szereg jest zbieŜny, jeśli jego n-ta suma częściowa posiada granicę właściwą
Badanie zbieŜności szeregu na podstawie granicy sumy częściowej jest najczęściej trudne, a często nawet niemoŜliwe. NiŜej zostanie pokazany jeden z przykładów, którego rozwiązanie jest raczej proste.
...
...
...
...
...
321
3213
212
11
nn aaaaS
aaaS
aaS
aS
++++=
++=+=
=
∑∞
= 1nna
∑=
=n
kkn aS
1
SSnn
=∞→
lim

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
9
� Przykład Zbadać zbieŜność szeregu
ZauwaŜmy, Ŝe k-ty składnik szeregu ma strukturę, która mogła powstać z sumy dwóch następujących ułamków
(po sprowadzeniu ich do wspólnego mianownika otrzymamy mianownik ułamka po lewej stronie). Na razie nie znamy wartości A i B. Wykonujemy proste przekształcenia
Ostatecznie
Równania 0=+ BA oraz A = 1 wynikają z porównania liczników po lewej i prawej stronie ostatniej zaleŜności. Tak więc A = 1, B = -1, czyli
Stosując powyŜszy wzór dla kolejnych składników n-tej sumy częściowej mamy
Granicą otrzymanej sumy jest oczywiście 1, czyli szereg jest zbieŜny. Gdyby wziąć odpowiednio duŜą liczbę wyrazów tego szeregu (np. kilkadziesiąt) i dodać je do siebie, to
∑∞
= +=+
⋅+
⋅+
⋅ 1 )1(1
...43
132
121
1
n nn
1)1(1
++=
+ k
B
k
A
kk
)1()(
)1()1(
1 +++=
+++=
++
kk
AkBA
kk
kBkA
k
B
k
A
1,0)1(
)()1(
1 ==+⇒+
++=+
ABAkk
AkBA
kk
111
)1(1
+−=
+ kkkk
( )
1111
...41
31
31
21
21
11
11
...43
132
121
1
+=
+−++−+−+−
=+
++⋅
+⋅
+⋅
n
n
nn
nn

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
10
otrzymany wynik będzie bliski jedynki. Warunek konieczny zbieŜności szeregu liczbowego Warunkiem koniecznym zbieŜności szeregu liczbowego o wyrazach dodatnich jest aby
� Przykłady Szereg
moŜe być zbieŜny, bo n-ty jego wyraz dąŜy do zera, a szereg
jest rozbieŜny, bo n-ty jego wyraz dąŜy do jedynki. Rzeczywiście, dalekie jego wyrazy są bliskie 1 i ich dodawanie zwiększa kolejne sumy częściowe prawie o jedynkę, tak więc nS musi rosnąć do nieskończoności (szereg rozbieŜny). Warunek konieczny jest niejako pierwszym testem, który (często natychmiastowo) pozwala ocenić, czy warto zajmować się zbieŜnością rozpatrywanego szeregu. Badanie zbieŜności za pomocą kryteriów PoniewaŜ badanie zbieŜności na podstawie granicy n-tej sumy częściowej jest trudne, więc w praktyce do tego celu wykorzystuje się tzw. kryteria zbieŜności. 1. Kryterium porównawcze 1.a. Rozpatrujemy szereg Σan . JeŜeli potrafimy pokazać taki szereg Σbn , Ŝe bn > an
(majoranta szeregu badanego) i szereg Σbn jest zbieŜny, to szereg Σan jest równieŜ zbieŜny.
1.b. Rozpatrujemy szereg Σan . JeŜeli potrafimy pokazać taki szereg Σbn , Ŝe bn < an
0lim =∞→ n
na
01
lim,1 3
13
=++∑
∞
= ∞→ n
n
n
n
nn
∑∞
= ∞→=
++1
12
lim,2n
n n
n
n
n

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
11
(minoranta szeregu badanego) i szereg Σbn jest rozbieŜny, to szereg Σan jest równieŜ rozbieŜny - rysunek.
RozbieŜna majoranta i zbieŜna minoranta nic nie mówią o badanym szeregu. W typowych zadaniach rolę wymyślonej przez nas majoranty lub minoranty odgrywają z reguły szeregi harmoniczne i geometryczne, czyli
Szereg harmoniczny jest zbieŜny, gdy 0>α , a geometryczny gdy 1<q . Warunek dotyczący wykładnika α wynika bardzo prosto z tzw. kryterium całkowego, które nie będzie tutaj omawiane, a warunek dotyczący q - ze wzoru na n-tą sumę częściową szeregu geometrycznego. � Przykłady Pierwszy z szeregów harmonicznych
jest zbieŜny ( 2=α ), a pozostałe są rozbieŜne ( 5.0=α i 1=α ).
n – ty wyraz minoranty
n – ty wyraz szeregu badanego
n – ty wyraz majoranty
minoranta rozbieŜna
majoranta zbieŜna
( ) ∑∑∞
=
∞
= + 01
,1
n
n
n
qABAn α
( ) ∑∑∑∞
=
∞
=
∞
= ++ 1112
1,
2
1,
32
1
nnn nnn

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
12
Pierwszy z szeregów geometrycznych
jest rozbieŜny ( 2=q ), a drugi zbieŜny ( 3/1=q ). � Przykład Zbadać zbieŜność szeregu
Szereg ten jest prawdopodobnie zbieŜny, bo w mianowniku występuje
2n . ,,Wymyślimy'' więc jego majorantę (szereg o wyrazach większych) zmniejszając mianownik składnika na szeregu badanego i starając się, aby majoranta była szeregiem harmonicznym. Tak więc
Otrzymany szereg jest majorantą zbieŜną ( 2=α ), czyli szereg badany jest zbieŜny. Inne przykłady pokazane będą na wykładzie i ćwiczeniach. Kryterium d'Alemberta Aby zbadać zbieŜność szeregu Σan wyznaczamy granicę
Jeśli 1<g , to szereg jest zbieŜny, jeśli 1>g - rozbieŜny, jeśli g = 1, to kryterium nie rozstrzyga o zbieŜności. W przypadku szeregów o wyrazach dodatnich symbol wartości bezwzględnej moŜna oczywiście pominąć.
∑ ∑∞
=
∞
=
⋅⋅0 0 3
12,23
n n
nn
∑∞
= ++12 13
1
n nn
∑∞
= +⇒
+=
++<
++ 12222 )1(
1
)1(
1
22
1
13
1
n nnnnnn
ga
a
n
n
n=+
∞→1lim

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
13
� Przykład Zbadać zbieŜność szeregu
Bierzemy
( )( ) ( ) ( )
101
42lim
21
!
!1
22lim
2
1
<=++=
+++
∞→
+
∞→ n
n
n
n
n
nnn
n
n
czyli szereg jest zbieŜny. Kryterium Cauchy'ego Aby zbadać zbieŜność szeregu Σan wyznaczamy granicę
Jeśli 1<g , to szereg jest zbieŜny, jeśli 1>g - rozbieŜny, jeśli g = 1, to kryterium nie rozstrzyga o zbieŜności. W przypadku szeregów o wyrazach dodatnich symbol wartości bezwzględnej moŜna oczywiście pominąć. Kryterium jest szczególnie efektywne dla szeregów typu Σ(#)n , bo n-ta potęga ,,znosi się'' z n-tym pierwiastkiem. � Przykład Zbadać zbieŜność szeregu
Bierzemy
czyli szereg jest zbieŜny.
( )∑∞
=
+
1 !
21
n
n
n
n
gann
n=
∞→lim
∑∞
=
++
1 23
32
n
n
n
n
132
2332
lim <=++
∞→ n
nn

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
14
Szeregi przemienne W praktyce inŜynierskiej pojawiają się szeregi typu
Są to tzw. szeregi przemienne. Warunkiem zbieŜności takiego szeregu jest, aby
przy czym szereg przemienny dla którego spełniony jest powyŜszy warunek jest zbieŜny bezwzględnie gdy szereg Σan jest zbieŜny, a zbieŜny warunkowo - gdy szereg Σan jest rozbieŜny. � Przykłady Zbadać zbieŜność szeregów
Bierzemy
czyli oba szeregi są zbieŜne. Pierwszy z nich jest zbieŜny bezwzględnie, bo analogiczny szereg o wyrazach dodatnich jest zbieŜny, a drugi zbieŜny warunkowo, bo analogiczny szereg o wyrazach dodatnich jest rozbieŜny (por. szeregi harmoniczne).
( )∑∞
=
+ +−+−=−1
43211 ...1
nn
n aaaaa
0lim =∞→ n
na
( )( )
( )∑ ∑∞
=
∞
=
++
+−
+−
1 1
12
1
2
11,
1
11
n n
nn
nn
( )0
2
1lim,0
1
1lim
2=
+=
+ ∞→∞→ nn nn

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
15
GRANICA I CI ĄGŁOŚĆ FUNKCJI Granica funkcji WaŜnym problemem w praktyce obliczeniowej jest zbadanie do czego dąŜy funkcja ( )xf , gdy x zmierza do punktu 0x lub do nieskończoności. Zadania takie zapisujemy następująco
Czasami naleŜy oddzielnie rozpatrywać granicę prawostronną (P) lub lewostronną (L) w punkcie 0x , a takŜe granicę dla ujemnej nieskończoności, czyli
KaŜda z tych granic moŜe być właściwa lub niewłaściwa – rysunek.
Granica właściwa w punkcie
( ) ( )xfxfxxx ∞→→lim,lim
0
( ) ( ) ( )xfxfxfxxxxx ∞−→→→ −+limlim,lim
00
Granica funkcji
w punkcie w nieskończoności
niewłaściwa właściwa
P L
εδδε
<−⇔= ∧∨∧<−>→
gxfgxfxxxx
)()(lim0
0 0

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
16
NaleŜy w tym miejscu przypomnieć, co oznacza zapis δ<− 0xx . Odpowiada on nierówności δδ <−<− 0xx , czyli δδ +<<− 00 xxx . Tak więc, mówimy o otoczeniu punktu 0x o szerokości δ . Otoczenie to jest obustronne (rysunek). W przypadku granicy prawostronnej rozwaŜamy tylko otoczenie prawostronne δ+<< 00 xxx , a w przypadku granicy lewostronnej - tylko otocznie lewostronne 00 xxx <<− δ .
Jak widać, w punkcie 0x funkcja ( )xf ma granicę właściwa, bo w zaznaczonym na rysunku otoczeniu tego punktu odległość między wartością funkcji w dowolnym jego punkcie, a granicą g jest mniejsza od dowolnie małego otoczenia granicy (ε). Przy definiowaniu prawostronnej lub lewostronnej granicy właściwej, naleŜy tylko pod symbolem ,,dla kaŜdego'' zmienić zapis otoczenia na prawo- lub lewostronne. Granicą właściwą w nieskończoności (asymptotę poziomą) definiuje się następująco
εε
<−⇔= ∧∨∧>>∞→
gxfgxfXxXx
)()(lim0

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
17
Jak widać, dla danego otoczenia granicy (ε) moŜna pokazać takie X , Ŝe wartości funkcji dla argumentów x na prawo od X , róŜnią się od granicy g o mniej niŜ ε. Granicę niewłaściwą w nieskończoności definiuje się następująco
Jak widać, dla przyjętej duŜej liczby E moŜna pokazać takie X , Ŝe wartości funkcji dla argumentów x na prawo od X są większe od E . W tym miejscu moŜna podkreślić, Ŝe definicje właściwej i niewłaściwej granicy ciągu są bardzo podobne do dwóch ostatnich definicji granic funkcji w nieskończoności. Istotnie, czy zmierzamy do nieskończoności ,,skacząc'' po liczbach naturalnych jak Ŝabka, czy zmierzamy do niej w sposób ciągły (jak narciarz na trasie bez muld), to nie ma to większego znaczenia dla osiągnięcia zamierzonego celu. Definicja granicy niewłaściwej w punkcie (asymptota pionowa)
Oznacza to, Ŝe dla dowolnie duŜego E moŜna wskazać takie otoczenie punktu 0x , _e w kaŜdym punkcie x z tego otoczenia, bezwzględna wartość funkcji ( )xf jest większa od przyjętego E . Na rysunku pokazano jedno z moŜliwych zachowań się funkcji w pobliŜu asymptoty pionowej. Z prawej i lewej strony funkcja zmierza do nieskończoności dodatniej.
ExfxfXxXEx
<⇔±∞= ∧∨∧>>∞→
)()(lim0
εε
<−⇔= ∧∨∧>>∞→
gxfgxfXxXx
)()(lim0

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
18
Obliczanie granic funkcji W pierwszej kolejności przedstawione będą pewne metody obliczania wybranych granic właściwych w punkcie 0x (więcej informacji z tej dziedziny moŜna uzyskać na wykładzie i ćwiczeniach). Przykłady dotyczą jednakowych granic prawo- i lewostronnych. Nie będziemy oczywiście rozpatrywać przypadków trywialnych, gdy po wstawieniu 0x otrzymujemy natychmiastowo ( )0xf . 1) Funkcja wymierna, symbol [0/0]. Symbol [0/0] jest symbolem nieoznaczonym. Z definicji dzielenia wynika, Ŝe jeśli 0/0 = A, to 0 = 0⋅A, czyli 0 = 0, co nie jest sprzecznością, ale nie wiemy ile wynosi A. JeŜeli w liczniku i mianowniku funkcji wymiernej uda się wydzielić ten sam czynnik, to po jego uproszczeniu z reguły pojawia się symbol oznaczony. � Przykłady
( )( )( )( ) 1
22
32lim
0
0
4
65lim
22
23
2−=
+−−−=
=−
+−→→ xx
xxx
x
xxxxx
( )( )( )( ) 2
122
126lim
00
4
)23(6lim
22
2
2=
+−−−−=
=−
+−−→→ xx
xxx
x
xxxxx
( )( )( ) 2
311
)1(1lim
00
1
1lim
2
12
3
1=
+−++−=
=−−
→→ xx
xxx
x
xxx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
19
2) Czasami, aby w liczniku i mianowniku wyraŜenia pojawił się wspólny czynnik, naleŜy wykonać pewne przekształcenia, m.in. w zadaniach często korzystamy ze wzoru ( ) ( )BABABA +−=− /22 .
� Przykłady
Podobnie rozwiązuje się zadania w których występują pierwiastki trzeciego stopnia (patrz wykłady). 3) Wykorzystanie wzoru
PokaŜemy prawdziwość tego wzoru dla granicy prawostronnej. Na rysunku pokazano ćwiartkę koła jednostkowego ( 1=R ), kąt ostry α , jego sinus i tangens. W kole jednostkowym miarą kąta ostrego α jest długość łuku odpowiadającego temu kątowi. Z rysunku widać, Ŝe
ααα tg≤≤sin
Po podzieleniu tej nierówności przez αsin , który w I ćwiartce jest dodatni, mamy
a po jej ,,obróceniu''
( ) 41
)22()1(2
42lim
00
23
22lim
222=
++−−−+=
=+−−+
→→ xxx
x
xx
xxx
( )( )24
21)21(11
lim00
21
1lim
1
2
1=
−++++−=
=−+
−→→ x
xxx
x
xxx
23
)24()99(
)39()44(lim
00
39
24lim
22
22
02
2
0=
++−+
++−+=
=−+
−+→→ xx
xx
x
xxx
1sin
lim0
=→ α
αα
ααα
cos1
sin1 ≤≤

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
20
Gdy α zmierza do zera, to αcos zmierza do jedynki, a więc wyraŜenie w środku teŜ musi mieć granicę równą 1 (twierdzenie o trzech granicach). Dowód dla granicy lewostronnej jest analogiczny.
� Przykłady
4) Granica prowadząca do liczby Eulera
Wzór powyŜszy wynika z podstawienia a = 1/n (lub n = 1/a) gdy n dąŜy do nieskończoności,
1sin
cos ≤≤α
αα
32
22cos32sin2
lim00
32
lim00
=⋅⋅
⋅=
=→→ xx
x
x
xtgxx
2
2
2sin24
4sin4
lim00
2sin4sin
lim00
=⋅
⋅
=
=→→
x
xx
x
x
xxx
( ) ea aa
=+→
1
01lim
34
434sin4
lim00
34sin
lim00
=⋅
⋅=
=→→ x
x
x
xxx
Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
21
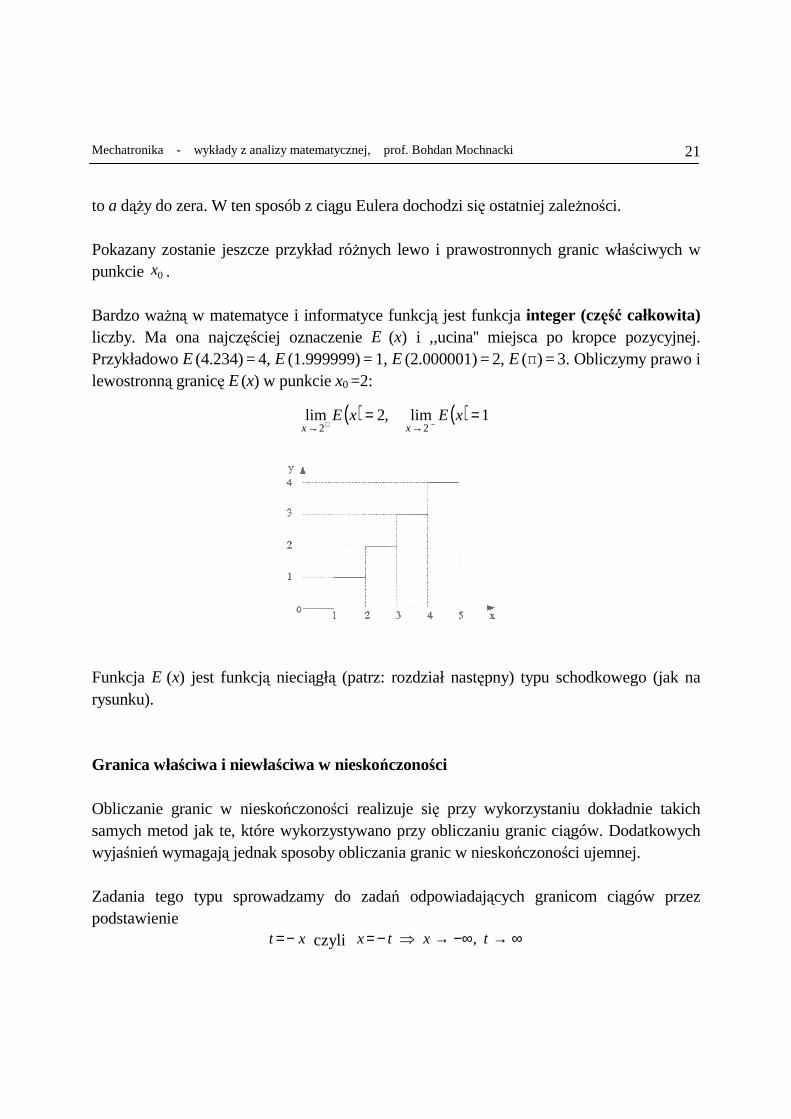
to a dąŜy do zera. W ten sposób z ciągu Eulera dochodzi się ostatniej zaleŜności. Pokazany zostanie jeszcze przykład róŜnych lewo i prawostronnych granic właściwych w punkcie 0x . Bardzo waŜną w matematyce i informatyce funkcją jest funkcja integer (część całkowita) liczby. Ma ona najczęściej oznaczenie E (x) i ,,ucina'' miejsca po kropce pozycyjnej. Przykładowo E (4.234) = 4, E (1.999999) = 1, E (2.000001) = 2, E (π) = 3. Obliczymy prawo i lewostronną granicę E (x) w punkcie x0 =2:
Funkcja E (x) jest funkcją nieciągłą (patrz: rozdział następny) typu schodkowego (jak na rysunku). Granica właściwa i niewłaściwa w nieskończoności Obliczanie granic w nieskończoności realizuje się przy wykorzystaniu dokładnie takich samych metod jak te, które wykorzystywano przy obliczaniu granic ciągów. Dodatkowych wyjaśnień wymagają jednak sposoby obliczania granic w nieskończoności ujemnej. Zadania tego typu sprowadzamy do zadań odpowiadających granicom ciągów przez podstawienie
xt −= czyli ∞→−∞→⇒−= txtx ,
( ) ( ) 1lim,2lim22
==−+ →→
xExExx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
22
� Przykłady
Asymptota ukośna Asymptota ukośna moŜe pojawić się gdy funkcja )( xf ma w nieskończoności granicę niewłaściwą. Jest to prosta o równaniu nxmy += taka, Ŝe (por. rysunek)
Tak więc w przypadku granicy niewłaściwej w nieskończoności moŜna sprawdzić, czy rozpatrywana funkcja posiada asymptotę ukośną i wykorzystać tę informację do określonych celów. Sposób wyznaczania asymptoty jest następujący: - z definicji tej asymptoty wynika, Ŝe
Dzielimy ostatnie równanie przez x, o którym pamiętamy, Ŝe zmierza ono do nieskończoności
czyli
32
13
22lim
1)()(3
2)()(2lim
13
22lim 23
3
23
3
23
3
=++−
+−−=+−+−
+−+−=++
++∞→∞→∞−→ tt
tt
tt
tt
xx
xxttx
( ) εε
<+−∧∨∧>>
nmxxfXxX
)(0
( ) ( ) 0lim =+−∞→
nmxxfx
( )0lim =
−−∞→ x
nm
x
xfx
( )0limlimlim =−−
∞→∞→∞→ x
nm
x
xfxxx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
23
skąd
Po obliczeniu m wracamy do definicji i znajdujemy n
� Przykłady Wyznaczyć asymptotę ukośną funkcji y = (x
2 + x +1)/(x + 1). ZauwaŜmy, Ŝe funkcja ma w nieskończoności granicę niewłaściwą.
czyli prosta y = x jest asymptotą ukośną rozpatrywanej funkcji. ZauwaŜmy równieŜ, Ŝe np. funkcja y = x
3 /(x + 1) nie posiada asymptoty ukośnej, mimo Ŝe na krańcach ma granicę niewłaściwą. Obliczanie granic niewłaściwych w punkcie Typowym przypadkiem pojawienia się granicy niewłaściwej w punkcie x0 jest sytuacja, gdy po wstawieniu w miejsce x wartości x0 otrzymamy symbol typu [A/0] (A jest liczbą róŜną od zera). Rzeczywiście jeśli podzielimy A przez liczbę bliską zera, to wynik dzielenia będzie bardzo duŜy. Przykładowo 5/0.001 = 5000, a juŜ 5/0.000001 = 5000000, ale np. 5/(- 0.000001) = - 5000000. Tak więc w granicy wynik zmierzać będzie do nieskończoności dodatniej lub ujemnej. Podstawowym problemem jest więc wyznaczenie znaku otrzymanej nieskończoności, przy czym w zadaniach tego typu naleŜy rozpatrywać oddzielnie granicę prawo i lewostronną w punkcie x0 . Bardzo efektywną pomocą w określeniu odpowiedniego znaku przy nieskończoności jest sporządzenie szkicowego wykresu funkcji
( )x
xfm
x ∞→= lim
( )[ ]mxxfnx
−=∞→
lim
( )1
1limlim 2
2
=+
++==∞→∞→ xx
xx
x
xfm
xx
( )[ ] 01
1lim
11
limlim2
=+
=
−
+++=−=
∞→∞→∞→ xx
x
xxmxxfn
xxx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
24
,,odpowiadającej'' za pojawienie się zera w wyraŜeniu [A/0]. � Przykłady Wyznaczyć granice podanej funkcji w punktach x1 =1 oraz x2 =3.
Rzeczywiście, w punktach 1 i 3 pojawiają się symbole typu [2/0] i [10/0], odpowiednio. ZauwaŜmy, Ŝe w tych punktach liczniki symboli są dodatnie. Szkic przebiegu mianownika funkcji pokazano na rysunku W pobliŜu punktu x2 =3 wartość mianownika z obu stron zmierza do zera, ale przyjmuje cały czas wartości dodatnie, natomiast w pobliŜu punktu x1 =1 mianownik równieŜ zmierza do zera, ale z prawej strony jest dodatni, a z lewej ujemny. Tak więc
Obliczymy jeszcze granicę prawo i lewostronną funkcji
( )( )( )2
2
31
1
−−+=xx
xxf
( ) ( ) +∞=
++=+∞=
++=
→→ +xfxf
xx _33lim,lim
( ) ( ) −∞=
−+=+∞=
++=
→→ +xfxf
xx _11lim,lim
( ) xxf1
2=

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
25
w punkcie x0 =0. Licznik wyraŜenia w wykładniku potęgi jest dodatni, a mianownik w zerze zmienia znak (prosta przechodząca przez (0, 0), z prawej dodatnia, a z lewej ujemna). Wynika stąd, Ŝe
W tym przykładzie granica lewostronna była właściwa, a prawostronna - niewłaściwa. Ciągłość funkcji Funkcja f (x) jest ciągła w punkcie x0 , jeśli jest w tym punkcie określona tzn. f (x0 )= y0 oraz
Funkcję ciągłą w przedziale [a, b] moŜna narysować nie odrywając ołówka od papieru. � Przykład Zbadać, czy funkcja
jest ciągła w punkcie x0 = 1. Z pierwszej linijki wynika, Ŝe f (1) = 3. PoniewaŜ
więc f (x) jest w tym punkcie ciągła, co więcej, jest ciągła w całym zbiorze R , bo dla innych wartości x0 jest z całą pewnością ciągła.
+∞==⇒+∞=
++= ∞
→→ ++22lim
1lim
1
00
x
xx x
022lim1
lim1
00_==⇒−∞=
−+= ∞−
→→ −
x
xx x
( ) ( ) 0000
lim,lim yxfyxfxxxx
==−+ →→
( )
<++≥+=
11
1,122
2
xxx
xxxf
( ) ( ) ( ) ( ) 31limlim,312limlim 2
11
2
11=++==+=
→→→→ −+xxxfxxf
xxxx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
26
JeŜeli f (x) nie jest ciągła w x0 , to jest w tym punkcie nieciągła, przy czym naleŜy tu rozpatrywać kilka wariantów nieciągłości. 1. Nieciągłość I typu (usuwalna) Ma ona miejsce, gdy f (x0 ) nie jest określona, ale prawo i lewostronna granica funkcji
w tym punkcie jest taka sama. Weźmy dla przykładu funkcję (x2 - 4)/(x - 2). Jak widać, funkcja nie jest określona dla
x = 2. ZauwaŜmy, Ŝe
czyli mamy do czynienia z nieciągłością I typu. Rozpatrywaną funkcję pokazano na
rysunku.
Funkcja tym róŜni się od prostej y = x + 2, Ŝe ma po drodze (w punkcie x0 ) ,,dziurę'', którą moŜna natychmiast usunąć (,,załatać'') przyjmując f (2) =4. 2. Nieciągłość II typu (skok skończony) W punkcie x0 funkcja f (x) jest albo nie jest określona, ale
Przykładem takiej nieciągłości jest zachowanie się omawianej juŜ funkcji E (x) w punktach 1, 2, 3, ...
( )( )4
2
22lim
2
4lim
2
2
2=
−+−=
−−
++ →→ x
xx
x
xxx
( ) ( ) LPLxx
Pxx
gggxfgxf ≠==−+ →→
,lim,lim00

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
27
3. Nieciągłość III typu (skok nieskończony, asymptota pionowa) W punkcie x0 funkcja f (x) nie jest określona, a jedna lub obie granice w tym punkcie są niewłaściwe. MoŜna w tym miejscu odwołać się do przykładu powszechnie znanej funkcji
xtgy = i jej zachowania się w pobliŜu punktów ππ kx += 2/ .

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
28
RACHUNEK RÓśNICZKOWY FUNKCJI JEDNEJ ZMIENNEJ
Definicja pochodnej Podstawy rachunku róŜniczkowego sformułowali w wieku XVII Newton i Leibnitz. Nie jest do końca pewne, któremu z nich naleŜy przyznać pierwszeństwo, bo ich odkrycia miały miejsce prawie równocześnie. Do pojęcia pochodnej dochodzi się poprzez sformułowanie pojęcia ilorazu róŜnicowego, który definiuje się na dwa sposoby (rysunki):
O funkcji )(xf zakładamy, Ŝe jest ciągła na odcinku. Pochodną funkcji )(xf w punkcie 0x nazywamy wspólną granicę
Pochodną funkcji )(xf oznaczamy symbolami )(xf ′ , y′ lub dy/dx (to oznaczenie będzie jasne, gdy poznamy pojęcie róŜniczki). JeŜeli w punkcie 0x granice ilorazu prawostronnego i ilorazu lewostronnego róŜnią się, to funkcja w tym punkcie nie posiada pochodnej (nie jest róŜniczkowalna).
( ) ( ) ( ) ( )h
hxfxfI
h
xfhxfI LP
−−=−+= 0000 ,
[ ]hxhx +− 00 ,
( ) ( ) ( ) ( ) ( )h
hxfxf
h
xfhxfxf
hh
−−=−+=′→→
00
0
00
00 limlim

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
29
� Przykłady
- Obliczyć z definicji pochodną funkcji
w punkcie x0 = 1. Mamy
ZauwaŜmy, Ŝe ilorazy róŜnicowe przekształcano podobnie jak granice w punkcie przy symbolu [0/0]. Ostatecznie
- Obliczyć z definicji pochodną funkcji
w punkcie x0 = 2. Mamy
Ostatecznie
( ) 3+= xxf
24
1
)24(
44431
++=
++−+=−++=
hhh
h
h
hI P
hhh
h
h
hI L −+
=−+−+=+−−=
42
1
)42(
44314
( )4
1limlim1
00===′
→→ Lh
Ph
IIf
( ) 232 ++= xxxf
( ) ( )h
h
hh
h
hhI P +=+=−++++= 7
7122232 22
( ) ( )h
h
hh
h
hhI L −=−=−−−−−= 7
7223212 22
( ) 7limlim200
===′→→ L
hP
hIIf

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
30
- Obliczyć z definicji pochodną funkcji
w punkcie x0 = 4. Mamy
Ostatecznie
i funkcja nie jest róŜniczkowalna w punkcie x0 = 4. Podstawowe wzory rachunku róŜniczkowego Wzory te, których znajomość jest niezbędna dla opanowania podstaw analizy matematycznej, wynikają z definicji pochodnej, przy czym w miejsce x0 przyjmujemy x (oczywiście z dziedziny rozpatrywanej funkcji). PoniewaŜ zajmować będziemy się funkcjami róŜniczkowalnymi, więc w dalszych rozwaŜaniach ograniczymy się do granicy ilorazu prawostronnego, mając pewność, Ŝe granica ilorazu lewostronnego jest taka sama. � Przykłady - Obliczymy pochodną funkcji x3 w dowolnym punkcie x0 = x. Mamy
Ostatecznie
( ) 432 −+= xxf
( )h
h
h
hI P
324432=
−−++=
( )h
h
h
hI P
−−=
−−−−=
344322
3lim,3lim00
−==→→ L
hP
hII
( ) 223322333
3333
hxhxh
xhxhhxx
h
xhxI P ++=−+++=−+=
( ) 2
03lim xIxf P
h==′
→

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
31
- Obliczymy pochodną funkcji xln w dowolnym punkcie 00 >= xx . Mamy
Ostatecznie
Podamy teraz najwaŜniejsze wzory rachunku róŜniczkowego
( ) ( )xfCyxfCy ′⋅=′⋅= ,
( ) ( ) ( ) ( )xvxuyxvxuy ′±′=′±= ,
( ) ( ) ( ) ( ) ( ) ( )xvxuxvxuyxvxuy ′⋅+⋅′=′⋅= ,
( ) ( ) �∈=′= − nxnxfxxf nn ,, 1
( ) ( ) xxfxxf cos,sin =′=
( ) ( ) xxfxxf sin,cos −=′=
( )x
eIxf xP
h
1lnlim
1
0=
==′
→
( ) xh
x
h
P x
h
x
h
x
hx
hh
xhxI
11
1ln1lnln1lnln
⋅
+=
+=
+=−+=
( ) ( ) 0, =′= xfCxf
( )( )
( ) ( ) ( ) ( )( )xv
xvxuxvxuy
xv
xuy 2,
′⋅−⋅′=′=
( ) ( )x
xftgxxf2cos
1, =′=
( ) ( )x
xfctgxxf2sin
1, −=′=
( ) ( )x
xfxxf1
,ln =′=

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
32
( ) ( ) xx exfexf =′= ,
( ) ( ) ppxfpxf xx ln, =′=
( ) ( ) ( ) ( )xxfyxzzfy ϕϕ ′⋅′=′== ,, Ostatni wzór wynika z twierdzenia o pochodnej funkcji złoŜonej (wykłady). Przykładowo, róŜniczkując funkcję
)43(ln 2 ++= xxy mamy
Wzory na pochodne funkcji wykładniczej i funkcji cyklometrycznych wynikają z twierdzenia o pochodnej funkcji odwrotnej (wykłady) - pochodna funkcji odwrotnej jest odwrotnością pochodnej funkcji wyjściowej. � Przykłady Obliczymy pochodną funkcji xe oraz xarcsin .
( ) ( )px
xfxxf p ln
1,log =′=
( ) ( )21
1,arcsin
xxfxxf
−=′=
( ) ( )21
1,arccos
xxfxxf
−−=′=
( ) ( )21
1,
xxftgxarcxf
+=′=
( ) ( )21
1,
xxfarcctgxxf
+−=′=
( )43
3232
143,ln
22
+++=+=′⇒++==xx
xx
zyxxzzy
xx eyx
yy
xeyyx ==′
=′⇒=′=⇒= 11,ln
22 1
1
sin1
1
cos
1cos,arcsinsin
xyyyyxxyyx
−=
−==′⇒=′=⇒=

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
33
Na zakończenie wyprowadzimy jeszcze kilka innych wzorów podstawowych (korzystając z ilorazu prawostronnego). � Przykłady Obliczyć pochodną funkcji sin x, tg x i pochodną iloczynu funkcji. Na początek przypomnijmy dwa znane wzory z trygonometrii, a mianowicie
Iloraz prawostronny dla funkcji sin x wynosi
i ostatecznie
Iloraz prawostronny dla funkcji tg x wynosi
i ostatecznie
Przekształcając ten iloraz wykorzystano toŜsamość tg x = sin x/cos x.
αββαβα
βαβαβα
- = ) - (
2
+
2
- 2 = -
cossincossinsin
cossinsinsin
( )
2
2cos
2sin
2cos
2sin2sinsin
h
hx
h
h
xhxxhx
h
xhxI P
+=
++−+
=−+=
xh
hx
h
hcos
2
2cos
2sin
lim0
=
+
→
( ) ( ) ( )( )
( )( )hxxh
xhx
hxxh
hxxxhx
h
tgxhxtgI P +
−+=+
+−+=−+=coscos
sin
coscos
cossincossin
( ) xhxxh
hh 20 cos
1
coscos
sinlim =
+→

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
34
Iloraz róŜnicowy dla iloczynu funkcji jest następujący
Iloczyn przekształcimy dodając i odejmując w liczniku wyraŜenie u (x)v (x + h), a następnie rozbijemy go na sumę dwóch składników
W granicy mamy
Pochodna w geometrii Bardzo waŜną własnością pochodnej funkcji f (x) w punkcie x0 jest fakt, Ŝe jej wartość odpowiada współczynnikowi kierunkowemu stycznej do f (x) w tym punkcie. Tak więc, równanie stycznej w punkcie (x0 , y0 ) jest postaci
( )( )000 xxxfyy −′=− Na rysunku pokazano cięciwę AB między punktami (x0 , y0 ) oraz (x0 + h, f (x0 +h)).
( ) ( ) ( ) ( )h
xvxuhxvhxuI P
−++=
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) =−+++−++=h
xvxuhxvxuhxvxuhxvhxuI P
( ) ( ) ( ) ( ) ( ) ( )h
xvhxvxuhxv
h
xuhxu −+++−+
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )xvxuxvxuh
xvhxvxuhxv
h
xuhxuh
′+′=−+++−+→0
lim

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
35
Równanie tej cięciwy (równanie prostej przez dwa punkty) jest następujące
Weźmy granicę przy B zmierzającym do A (h dąŜy do zera)
ZauwaŜmy jeszcze, Ŝe gdy B zbliŜa do A, to cięciwa coraz dokładniej odpowiada stycznej w punkcie A(x0 , y0 ). � Przykłady - UłoŜyć równanie stycznej do y = x
3 + x + 1 w punkcie x0 =1. ZauwaŜmy, ze punkt A ma współrzędne (1, 3). Obliczmy pochodną funkcji f (x ):
( ) 41,13 2 =′+=′ fxy czyli
( ) 14143 −=⇒−=− xyxy - Napisać równanie normalnej do krzywej y = ln x w punkcie x0 =1 (jest to prosta prostopadła do stycznej w rozpatrywanym punkcie). Punkt A ma współrzędne (1, 0), a pochodna w tym punkcie wynosi
Współczynnik kierunkowy normalnej mN jest (z warunku prostopadłości) odwrotnością mS ze znakiem przeciwnym. Ostateczne
( ) 111 +−=−−= xxy RóŜniczka funkcji RóŜniczką funkcji nazywamy z definicji wyraŜenie
Odległość x - x0 oznaczono przez dx.
( ) ( ) ( )000
0 xxh
xfhxfyy −−+=−
( ) ( ) ( ) ( )( )00000
00 lim xxxfxx
h
xfhxfyy
h−′=−−+=−
→
( ) 111,1 −=⇒==′=′ NS mmfx
y
( )( ) ( )dxxfxxxfdy 000 ′=−′=

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
36
Na rysunku pokazano krzywą )( xf , styczną do niej w punkcie ),( 00 yx oraz odcinki, które oznaczono dy oraz y∆ .
ZauwaŜmy, Ŝe
Tak więc, pokazany na rysunku odcinek ,,do stycznej'' jest róŜniczką funkcji. Rzeczywisty przyrost funkcji między punktami x0 i x oznaczono przez y∆ (rysunek), natomiast dy jest przyrostem między x0 i x liczonym po stycznej. Jak widać, dla małych odległości dx wartości te są do siebie zbliŜone
dyy ≈∆ Z rysunku widać równieŜ, Ŝe
( ) ( ) ( ) ( ) ( )( )00000 xxxfxfdyxfyxfxf −′+=+≈∆+=
Ostatni wzór jest bardzo często wykorzystywany w naukach technicznych. � Przykłady - Obliczymy róŜniczkę i rzeczywisty przyrost funkcji x2 + 3x +2 między punktami x0 =1 oraz x =1.2. ZauwaŜmy, Ŝe f (1) = 6, f (1.2) = 7.04, czyli ∆y =1.04. Pochodna funkcji f (x) wynosi
( ) ( ) 12,055132 =⋅=⇒=′⇒+=′ dyfxxf
( ) ( )( )0000
xxxfxxmdyxx
dytgm SS −′=−=⇒
−== α

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
37
Rzeczywisty przyrost funkcji: ∆y =1.04, a róŜniczka: dy=1. Są to więc wartości zbliŜone. - Obliczymy jeszcze pierwiastek kwadratowy z 1.21 (jak wiadomo, pierwiastek ten jest równy 1.1). Jako punkt startowy wybierzmy x0 =1, wartość pierwiastka w tym punkcie wynosi f (x0 )=1, natomiast x - x0 =0.21. Dalej
czyli
Otrzymany wynik jest bardzo bliski wartości rzeczywistej. Przykład ten nie ma oczywiście znaczenia praktycznego (bo do obliczenia pierwiastka z dowolnej liczby wystarczy kalkulator). Z drugiej jednak strony, przykład pokazuje sposób liczenia wartości funkcji w punkcie x na podstawie informacji o jej parametrach w punkcie x0 , czyli przy pewnych załoŜeniach mamy moŜliwość ,,prognozowania'' co się dzieje w pobliŜu punktu startowego. Pochodne wyŜszych rzędów Pochodne wyŜszych rzędów liczy się w sposób naturalny. Pochodną rzędu n funkcji f (x) wyznacza się na podstawie uprzednio obliczonej pochodnej rzędu n-1, wykorzystując po raz kolejny znane reguły róŜniczkowania. � Przykład Sprawdzić, Ŝe rozwiązaniem równania 6y ′- 5y ′′ + y ′′′ =0 jest funkcja typu
xx CeBeAy 32 ++= Obliczamy kolejno
xx CeBey 32 32 +=′ xx CeBey 32 94 +=′′ xx CeBey 32 278 +=′′′
( ) ( ) ( )2
11,
2
1, =′=′= f
xxfxxf
105.12
21.0121.1 =+≈

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
38
Po wstawieniu do lewej strony równania otrzymujemy
Po prawej stronie równania było równieŜ 0, czyli y jest rozwiązaniem. Rozwijanie funkcji w szereg potęgowy Niezwykle waŜnym w praktyce inŜynierskiej jest tzw. wzór Taylora. JeŜeli )(xf jest na odcinku [x0 , x] ciągła i nieskończenie wiele razy róŜniczkowalna, to
Tak więc, przy pewnych załoŜeniach, na podstawie wartości funkcji i jej pochodnych w punkcie x0, moŜna wyznaczyć jej wartość w punkcie x. ZauwaŜmy, Ŝe wzór przedstawiony w podrozdziale dotyczącym róŜniczki odpowiada dwóm pierwszym składnikom wzoru Taylora i dlatego był tylko wzorem przybliŜonym. Dla x0 =0 otrzymuje się
Ten szczególny przypadek wzoru Taylora nazywany jest wzorem Maclaurina. JeŜeli tylko pojawia się moŜliwość wykorzystania takiej wersji rozwinięcia funkcji w szereg, to naleŜy z niej skorzystać, bo wzór Maclaurina jest istotnie prostszy. � Przykłady - Funkcję xe rozwinąć w szereg potęgowy w otoczeniu punktu x0 =0. Mamy
...,,,, xxxx eyeyeyey =′′′=′′=′=
( ) ( ) ( ) ( ) ...,10,10,10,10 =′′′=′′=′= yyyy czyli
( ) ( ) 0278945326 323232 =+++−+ xxxxxx CeBeCeBeCeBe
( ) ( ) ( )( ) ( ) ( ) ( ) ( )...
!3!2
30
0
20
0000 +−′′′+−′′+−′+= xxxf
xxxfxxxfxfxf
( ) ( ) ( ) ( ) ( ) ...!3
0!2
00032
+′′′+′′+′+= xf
xfxffxf
∑∞
==++++=
0
32
!...
!3!21
n
nx
n
xxxxe

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
39
- Obliczmy jeszcze pierwiastek kwadratowy z liczby e biorąc coraz większą liczbę wyrazów szeregu
Kolejne sumy wynoszą: 1, 1.5, 1.625, 1.6458 itd. Wartość ''dokładna'' obliczona za pomocą kalkulatora wynosi 1.6487 (kalkulator zresztą korzysta z tego samego szeregu, tylko uwzględnia duŜo większą liczbę jego wyrazów). Jak widać, kolejne wyniki obliczeń są coraz bliŜsze wartości ''dokładnej'' (maleje błąd oszacowania interesującej nas wielkości). O związkach między liczbą wyrazów rozwinięcia w szereg Maclaurina, a jego dokładnością oszacowania f (x) dla przyjętego x decyduje wzór determinujący tzw. Resztę
Problem ten zostanie szerzej omówiony na wykładzie. - Rozwiniemy teraz funkcję sin x w szereg potęgowy
( ) 00,sin == fxy ( ) 10,cos =′=′ fxy ( ) 00,sin =′′−=′′ fxy ( ) 10,cos −=′′′−=′′′ fxy ( ) 00,sin == IVIV fxy
..... czyli
Wykorzystamy ten wzór do obliczenia sin 30o z dokładnością do dwóch pierwszych niezerowych wyrazów rozwinięcia:
∑∞
==++++==
0
3221
!
5.0...
!3
5.0
!2
5.05.01
n
n
nee
( )( ) [ ]xn
xfR
nn
n ,0,!
∈= ξξ
( ) ( )∑∞
=
−+
−−=−+−=
1
121
53
!121...
!5!3sin
n
nn
n
xxxxx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
40
Jak wiadomo, powinno wyjść dokładnie 0.5, ale wzięto bardzo małą liczbę wyrazów. - Rozwinięcie funkcji cos x w szereg Maclaurina jest następujące (proszę samodzielnie sprawdzić)
Reguła de L'Hospitala Dotyczy ona liczenia granic w punkcie (symbol 0/0). W szczególności
Rozpatrujemy symbol [0/0], czyli u (x0 ) = v (x0 ) =0. Lewą stronę reguły przekształcamy w sposób następujący
W pierwszej kolejności w liczniku i mianowniku odjęto zera, następnie licznik i mianownik podzielono przez to samo wyraŜenie. PoniewaŜ granica ilorazu jest równa ilorazowi granic, więc
ZauwaŜmy, Ŝe zarówno licznik jak i mianownik dąŜą do pochodnych w punkcie x0 , chociaŜ formalny zapis granic ilorazów róŜnicowych jest nieco inny, niŜ w rozdziałach poprzednich.
4996.06
5236.05236.0
!36
66sin
2
3
=−≈
−=
πππ
( ) ( )!21...
!4!21cos
2
0
42
n
xxxx
n
n
n∑∞
=−=−+−=
( )( )
( )( )0
0
0
limxv
xu
xv
xuxx ′
′=
→
0
0
0
0
0
0
)()(
)()(
lim)()(
)()(lim
)(
)(lim
000
xx
xvxvxx
xuxu
xvxv
xuxu
xv
xuxxxxxx
−−−−
=−−=
→→→
( )( )0
0
0
0
0
0
0
0
0
0
)()(lim
)()(lim
)()(
)()(
lim
0
0
0 xv
xu
xx
xvxvxx
xuxu
xx
xvxvxx
xuxu
xx
xx
xx ′′
=
−−−−
=
−−−−
→
→
→

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
41
Regułę de L'Hospitala moŜna uŜywać równieŜ dla symbolu [∞/∞], a po pewnych wstępnych przekształceniach równieŜ dla innych symboli nieoznaczonych. � Przykłady - Obliczyć
- Obliczyć
Jak widać, reguły moŜna uŜywać wielokrotnie, aŜ do skutku. Warunek konieczny istnienia ekstremum Lokalne ekstremum funkcji definiuje się następująco 1. Funkcja f (x) osiąga lokalne maksimum w punkcie x0 , gdy istnieje takie otoczenie punktu x0 , Ŝe (por. rysunki)
2. Funkcja f (x) osiąga lokalne minimum w punkcie x0 , gdy istnieje takie otoczenie punktu x0 , Ŝe (por. rysunki)
1cos
lim0
0
sin
1lim
00==
−→→ x
e
x
e x
x
x
x
2cos
lim0
0
sinlim
0
0
cos1
2lim
0
0
sin
2lim
0000=+=
−=
−−+=
−−− −
→
−
→
−
→
−
→ x
ee
x
ee
x
ee
xx
xee xx
x
xx
x
xx
x
xx
x
( )xfxfxx
>∧<−
)( 00 δ
( )xfxfxx
<∧<−
)( 00 δ

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
42
Wyprowadzimy teraz warunek konieczny istnienia ekstremum maksimum (wywody dotyczące istnienia minimum są analogiczne). Rozpatrujemy funkcję )(xf ciągłą i róŜniczkowalną w otoczeniu punktu x0 , w którym występuje maksimum lokalne. Tworzymy ilorazy róŜnicowe
Znaki IP oraz IL wynikają z definicji maksimum lokalnego (por. rysunek). PoniewaŜ funkcja jest róŜniczkowalna, więc
,,Punktem styku'' liczb ujemnych i dodatnich jest oczywiście 0 i tyle musi wynosić wspólna granica ilorazów.
( ) ( ) ( ) ( )0,0 0000 >−−=<−+=
h
hxfxfI
h
xfhxfI LP
0limlim00
==→→ L
hP
hII

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
43
Podsumowując: warunkiem koniecznym istnienia ekstremum (zarówno maksimum, jak i minimum) w punkcie x0 , jest aby pochodna f '(x) wynosiła w tym punkcie 0. Na wykładzie zostaną pokazane przykłady, Ŝe powyŜszy warunek nie jest wystarczający. Warunek wystarczający istnienia ekstremum Ze wzoru Taylora moŜna pokazać (patrz: wykłady), Ŝe warunkiem wystarczającym istnienia ekstremum w punkcie x0 , w którym pierwsza pochodna zeruje się, jest aby - pierwsza pochodna w punkcie x0 zmieniała swój znak, - druga pochodna funkcji w tym punkcie była róŜna od zera, przy czym
( ) ⇒>′′ 00xf minimum, ( ) ⇒<′′ 00xf maksimum
Obydwie wersje powyŜszego twierdzenia są równowaŜne, a korzysta się z tej, która w danym zadaniu jest wygodniejsza. � Przykłady - Wyznaczyć ekstrema funkcji y = 2x2 - lnx ZauwaŜmy, Ŝe dziedziną tej funkcji jest x > 0. Obliczamy pierwszą pochodną:
czyli x1 =1/2, x2 = -1/2 (co oczywiście nie spełnia załoŜeń o dziedzinie). Tak więc punktem,
w którym moŜe pojawić się ekstremum jest punkt (0.5, 0.5-ln0.5). Obliczamy drugą pochodną: Funkcja f (x) osiąga w obliczonym punkcie minimum.
( )( )0
12121414
2
=+−=−=−=′x
xx
x
x
xxy
MINyx
y ⇒>
′′+=′′ 02
1,
14
2

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
44
- Z kwadratowego arkusza o boku 18 cm naleŜy wykonać pudełko (jak na rysunku). Jakie kwadraciki trzeba wyciąć w naroŜach arkusza, aby po zagięciu objętość otrzymanego pudełka była największa.
Objętość pudełka
( ) xxV 2218−= Pochodna objętości
Z warunku koniecznego ekstremum mamy x1 =9, x2 =3. Obliczymy drugą pochodną
Tak więc, naleŜy wyciąć naroŜniki o boku 3 cm. Twierdzenie Rolla i Lagrange'a Twierdzenie Rolla Rozpatrujemy funkcję f (x) ciągłą i róŜniczkowalną w przedziale [a, b]. Funkcja na krańcach przedziału przyjmuje takie same wartości f (a) = f (b). W takim przypadku, w przedziale [a, b] istnieje co najmniej jeden taki punkt ξ, Ŝe f ′(ξ) =0. Gdy między punktami a i b funkcja jest stała (linia pozioma), to wszystkie punkty w tym przedziale spełniają warunek o zerowaniu się pochodnej. Gdy funkcja nie jest stała, to wewnątrz przedziału [a, b] musi znaleźć się co najmniej jeden punkt, w którym pojawi się
( ) ( ) ( )( ) 0682182182184 2 =−−=−+−−=′ xxxxxV
( ) ( ) ( ) maksimumVxxV ⇒<′′⇒−−−−=′′ 0321866182

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
45
lokalne maksimum lub minimum. Twierdzenie Lagrange'a Rozpatrujemy funkcję f (x) ciągłą i róŜniczkowalną w przedziale [a, b]. Funkcja na krańcach przedziału przyjmuje wartości f (a) oraz f (b). W takim przypadku, w przedziale [a, b] istnieje co najmniej jeden taki punkt ξ, Ŝe (rysunek)
Dowód będzie przedstawiony na wykładzie.
Treść twierdzenia sprowadza się do faktu, Ŝe dla przyjętych załoŜeń, w przedziale [a, b] znajduje się co najmniej jeden taki punkt ξ, w którym styczna jest równoległa do cięciwy między skrajnymi punktami. � Przykład Weźmy funkcję y = ln x w przedziale [1, e]. Wartości funkcji na jego krańcach wynoszą ln 1 =0 oraz ln e =1, czyli [f (b)-f (a)]/(b-a) =1/(e-1). Pochodna logarytmu naturalnego, która
( )ab
afbff
−−=′ )()(ξ

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
46
wynosi 1/x będzie równa 1/(e-1) w punkcie e-1. Punkt ten naleŜy do wnętrza przedziału [1, e]. Monotoniczność funkcji Dla funkcji ciągłej i rosnącej w przedziale [a,b] i trzech kolejnych punktów z tego przedziału: x0 -h, x0 , x0 +h mamy f (x0 -h) < f (x0 ) < f (x0 +h). Tak więc ilorazy róŜnicowe
są dodatnie, a więc ich wspólna granica (zakładamy róŜniczkowalność funkcji) musi równieŜ być dodatnia. Podsumowując: funkcja rosnąca w przedziale [a,b] ma w tym przedziale pochodną dodatnią. Podobnie: funkcja malejąca w przedziale [a,b] ma w tym przedziale pochodną ujemną. � Przykład Weźmy funkcję
jej pochodna wynosi
PoniewaŜ mianownik wyraŜenia jest dodatni, wystarczy rozpatrywać tylko znak jego licznika. Z wykresu paraboli x2 - 1 widać natychmiast, Ŝe pochodna jest ujemna w przedziale (-1, 1), a dodatnia dla pozostałych x. Funkcja maleje w przedziale (-1, 1), a rośnie dla x ∈(-∞, -1) lub x ∈(1, ∞).
( ) ( ) ( ) ( )0,0 0000 >−−=>−+=
h
hxfxfI
h
xfhxfI LP
( ) R,11
2
2
∈+++−= x
xx
xxxf
( ) ( ) ( ) ( )22
2
22
22
)1(
12
)1(
)1(12)1(12
++−=
+++−+−++−=′
xx
x
xx
xxxxxxxf

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
47
Wkl ęsłość, wypukłość, punkty przegięcia Bardziej ,,czytelne'' wydają się nazwy ,,funkcja wypukła w górę'' i ,,funkcja wypukła w dół''. Pierwszą z nich pokazano na rysunku.
JeŜeli w kaŜdym punkcie z przedziału [a, b] styczna do krzywej jest nad tą krzywą, to mówimy o wypukłości w górę, w przypadku przeciwnym - o wypukłości w dół. Punkt, w którym następuje zmiana wypukłości nazywa się punktem przegięcia. Z wzoru Taylora moŜna pokazać, Ŝe warunkiem wypukłości w górę w przedziale [a, b] jest, aby druga pochodna w tym przedziale była ujemna
( ) ( )I 0<′′⇔∈ xfxf oraz
Gdy druga pochodna w punkcie x0 jest równa 0, to punkt x0 jest punktem przegięcia. � Przykład Wyznaczymy przedziały wypukłości funkcji
( ) ( ) �∈++= xexxf x,1 4 RóŜniczkujemy
( ) ( ) ( ) ( ) xx exxfexxf ++=′′++=′ 23 112,14
Jak widać, druga pochodna jest zawsze dodatnia, czyli funkcja jest wypukła w dół w całej swojej dziedzinie.
( ) ( ) 0>′′⇔∈U xfxf

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
48
RACHUNEK RÓśNICZKOWY FUNKCJI WIELU ZMIENNYCH Bardziej szczegółowo omawiane będą funkcje dwóch zmiennych z = f (x, y). Uogólnienie rozwaŜań na funkcje większej liczby zmiennych jest najczęściej naturalnym rozszerzeniem informacji o funkcjach dwóch zmiennych. W przypadku funkcji dwóch zmiennych rozwaŜamy pewien obszar D (dziedzinę funkcji) w płaszczyźnie {x, y}. KaŜdemu punktowi obszaru D przyporządkowujemy wartość z wynikającą z zaleŜności z = f (x, y). Przykładowo, jeśli z = x
2 + y, x, y ∈R, to dla x =1, y =2: z
=3, a dla x =2, y =0: z =4 itd. ZauwaŜmy, Ŝe w kartezjańskim przestrzennym układzie współrzędnych {x, y, z} funkcja dwóch zmiennych odwzorowuje się w postaci powierzchni ,,rozpiętej'' nad obszarem D - rysunek.
Definicje pochodnych cząstkowych Z punktu P0 (x0 , y0 ) moŜemy przemieścić się do blisko połoŜonych punktów na kierunku równoległym do osi x, czyli P1 (x0 + h, y0 ) lub P2 (x0 -h, y0 ). MoŜemy równieŜ przemieścić się do blisko połoŜonych punktów na kierunku równoległym do osi y, czyli P3 (x0 , y0 +k) lub P4 (x0 , y0 -k) - rysunek. Zdefiniujemy, analogicznie jak w przypadku funkcji jednej zmiennej, prawo i lewostronne ilorazy róŜnicowe
oraz
( ) ( ) ( ) ( )h
yhxfyxfI
h
yxfyhxfI x
LxP
00000000 ,,,
,, −−=−+=

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
49
W pierwszym ilorazie nadano przyrost tylko zmiennej x, a w drugim - tylko zmiennej y. Granice tych ilorazów (jeśli istnieją)
nazywamy pochodnymi cząstkowymi funkcji f (x, y) w punkcie P0 . Pierwsze pochodne funkcji f (x, y) względem x i y oznaczamy przez fx'i fy' lub ∂f/∂x i ∂f/∂x.
� Przykład
- Obliczymy z definicji pochodną funkcji
( ) yxyxyxf 223 2, ++= w dowolnym punkcie x0 = x, y0 = y. Ilorazy róŜnicowe w kierunku x wynoszą
( ) ( ) ( ) ( )k
kyxfyxfI
k
yxfkyxfI y
LyP
−−=−+= 00000000 ,,,
,,
( )0000
,limlim yxfII xxL
h
xP
h′==
→→
( )0000
,limlim yxfII yyL
k
yP
k′==
→→
( ) ( )h
yxyxyhxyhxI x
P
223223 22 −−−++++=
( ) ( )h
yhxyhxyxyxI x
L
223223 22 −−−−−++=

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
50
a po przekształceniach hyxyhxhxI x
P ++++= 233 22 hyxyhxhxI x
L −++−= 233 22 Ostatecznie
Ilorazy róŜnicowe w kierunku y wynoszą
a po przekształceniach 224 xkyI y
P ++= 224 xkyI x
L +−= Ostatecznie
Z przedstawionego wyŜej przykładu wynikają proste reguły róŜniczkowania funkcji dwóch (lub więcej) zmiennych, wynikają one oczywiście równieŜ z definicji pochodnych cząstkowych: - Licząc pochodną względem x traktujemy y jako wartość stałą (liczbę). - Licząc pochodną względem y traktujemy x jako wartość stałą (liczbę). Pochodne wyŜszych rzędów Funkcja dwóch zmiennych posiada dwie pochodne rzędu pierwszego ∂f/∂x oraz ∂f/∂y. KaŜde z tych wyraŜeń moŜemy zróŜniczkować względem x lub y i ten sposób otrzymamy cztery pochodne rzędu drugiego, a potem 8 pochodnych rzędu trzeciego itd. - rysunek.
( ) xyxIIyxf xL
h
xP
hx 23limlim, 2
)0+===′
→→
( ) ( )k
yxyxkyxkyxI y
P
223223 22 −−−++++=
( ) ( )k
kyxkyxyxyxI x
L−−−−−++=
223223 22
( ) 2
004limlim, xyIIyxf y
Lh
yP
hx +===′
→→

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
51
Dolny wskaźnik xx oznacza dwukrotne róŜniczkowanie po x, a np. xy oznacza, Ŝe pochodną względem x róŜniczkujemy powtórnie po y, itd. Pochodne cząstkowe rzędu II oznaczamy równieŜ ∂2f /∂x2 , ∂2f /∂x ∂y, itd. Wykonamy teraz następujące proste doświadczenie. Weźmy funkcję
( ) 2243, yxyxyxf ++= i obliczymy jej pochodne do rzędu trzeciego włącznie Mamy
( ) xyxyxfx 23, 42 +=′ ( ) yyxyxfx 24, 33 +=′
Z kolei
Fakt, Ŝe pochodne mieszane tzn. xy i yx są takie same, nie jest przypadkiem. Mówi o tym twierdzenie Schwarza: JeŜeli funkcja f (x, y) posiada pochodne mieszane, to są one takie same.
( ) 3212, yxyxfxy =′′
( ) 26, 4 +=′′ xyyxfxx
( ) 3212, yxyxf yx =′′
( ) 212, 23 +=′′ yxyxf yy

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
52
Obliczmy jeszcze pochodne rzędu trzeciego
Takie same wyniki otrzymano dla pochodnych xxy, xyx, yxx i takie same dla yyx, yxy oraz xyy. To równieŜ nie jest przypadkiem: Pochodne mieszane, jeśli istnieją, nie zaleŜą od kolejności róŜniczkowania. Przykładowo, dwukrotne róŜniczkowanie po x i jednokrotne po y daje zawsze ten sam wynik, bez względu na to, w jakiej kolejności będziemy róŜniczkować. Pochodna kierunkowa Pochodne cząstkowe względem x lub y są granicami ilorazów róŜnicowych, dla których funkcji f (x, y) nadano przyrosty związane ze zmianą współrzędnej x lub y. MoŜna jednak rozpatrywać przyrost funkcji przy równoczesnej zmianie obu argumentów, czyli
gdzie ∆n jest odległością między (x0 , y0 )a (x0 + h, y0 + k) - por. rysunek.
( ) ( ) 34 24,6, xyyxfyyxf xxyxxx =′′′=′′′
( ) ( ) 223 36,24, yxyxfxyyxf xyyxyx =′′′=′′′
( ) ( ) 223 36,24, yxyxfxyyxf yxyyxx =′′′=′′′
( ) ( ) yxyxfyxyxf yyyyyx322 24,36, =′′′=′′′
( ) ( )n
yxfkyhxfI n ∆
−++= 0000 ,,

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
53
Granicę takiego ilorazu róŜnicowego przy 0→∆ n nazywamy pochodną kierunkową w kierunku n (kierunek wynika z przyjętych kątów α i β . Iloraz nI przekształcimy w sposób
następujący
ZauwaŜmy, Ŝe h/∆n = cos α, k/∆n = cos β. Gdy 0→∆n , to h → 0 i k → 0. Ostatecznie
Dla funkcji trzech zmiennych
Uwaga: Dobór kątów z osiami x i y w zadaniach 2D jest oczywisty. Gdy np. α =30o, to β =60o, a gdy α =45o , to β =45o . Sytuacja jest trudniejsza dla problemów 3D. Dopuszczalne kąty α, β, γ muszą spełniać warunek
� Przykłady - Obliczyć pochodną kierunkową funkcji u =x2 y3 z2 w punkcie (1, 2, 1) w kierunku
α = 45o, β = 45o, γ = 60o . ZauwaŜmy, Ŝe
a więc zadanie nie ma sensu (kierunek taki w przestrzeni 3D nie istnieje).
1 = + + 2 2 2 γβα coscoscos
1 2
1 +
2
2 +
2
2 = + +
2 2 2
2 2 2 ≠
γβα coscoscos
( ) ( ) ( ) ( ) =∆
−++∆
+−++=n
yxfkyxf
n
kyxfkyhxfI n
00000000 ,,,,
( ) ( ) ( ) ( )n
k
k
yxfkyxf
n
h
h
kyxfkyhxf
∆−++
∆+−++ 00000000 ,,,,
( ) ( ) ( ) βα cos,,cos,lim,0
zyxfyxfIyxf yxnn
n ′+′==′→∆
( ) ( ) ( ) ( ) γβα cos,,cos,,cos,,,, zyxfzyxfzyxfzyxf zyxn ′+′+′=′

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
54
- Obliczyć pochodną kierunkową funkcji u =x2 y3 z2 w punkcie (1, 2, 1) w kierunku
α = 45o, β = 60o, γ = 60o . W tym przykładzie kąty dobrano właściwie, a pochodne cząstkowe w punkcie (1, 2, 1) wynoszą
( ) ( ) 161,2,1,2,, 32 =′=′ zz fzyxzyxf czyli
( ) 28.2586281,2,1 ≈++=′f
Gradient funkcji W przypadku funkcji dwóch zmiennych gradient funkcji jest wektorem o składowych
JeŜeli funkcję dwóch zmiennych (powierzchnię) będziemy przecinać płaszczyznami równoległymi do osi z (z =const.), to otrzymamy obraz warstwicowy tej funkcji (jak np. mapa turystyczna Beskidu Sądeckiego). Wektor gradientu w punkcie P0 jest prostopadły (normalny) do odpowiedniej warstwicy, zorientowany w kierunku wzrostu funkcji (,,pod górkę'') i ma tym większą długość, im powierzchnia w tym punkcie jest bardziej stroma (rysunek). Pojęcie gradientu ma ogromne znaczenie w naukach technicznych.
( ) ( ) 161,2,1,2,, 23 =′=′ xx fzxyzyxf
( ) ( ) 121,2,1,3,, 222 =′=′ yy fzyxzyxf
∂∂
∂∂=
y
f
x
fyxfgrad ,),(

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
55
W przypadku funkcji trzech zmiennych gradient funkcji jest wektorem o składowych
� Przykłady - Obliczyć gradient funkcji yxz = w punkcie x0 =1, y0 =2. Mamy
Tak więc, gradient funkcji w punkcie (1,2) jest wektorem o składowych [2,0].
- Obliczyć gradient funkcji zeyxu = w punkcie (1, 2,0) Mamy
∂∂
∂∂
∂∂=
z
f
y
f
x
fzyxfgrad ,,),,(
0ln
2
0
0
1
=
∂∂=
∂∂
=
∂∂=
∂∂ −
P
y
P
y
y
zxx
y
z
x
zxy
x
z
2
1
2
0
0
0
=
∂∂=
∂∂
=
∂∂=
∂∂
=
∂∂=
∂∂
P
z
P
z
P
z
z
ueyx
z
u
y
uex
y
u
x
uey
x
u

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
56
Gradient funkcji w punkcie (1, 2, 0) jest wektorem [2, 1, 2], a jego długość wynosi 3. Pochodna kierunkowa a gradient funkcji ZauwaŜmy, Ŝe wektor o składowych [ ]γβα cos,cos,cosn⋅ jest wektorem jednostkowym (por. wzór w ramce) tworzącym z osiami układu współrzędnych kąty α, β, γ. Podobna
sytuacja ma miejsce w zadaniach 2D. Iloczyn skalarny
odpowiada pochodnej kierunkowej i ten zapis wykorzystywany jest często w literaturze technicznej. Tak więc, pochodna kierunkowa jest iloczynem skalarnym gradientu funkcji i wektora jednostkowego o odpowiednim kierunku. RóŜniczka funkcji dwóch zmiennych RóŜniczką funkcji ),( yxf w punkcie ),( 00 yx nazywamy z definicji wyraŜenie
lub oznaczając x - x0 =dx, y - y0 =dy:
Widać tu pełną analogię do róŜniczki funkcji jednej zmiennej. Podobnie jak w przypadku funkcji jednej zmiennej, róŜniczka dz jest przybliŜoną miarą przyrostu funkcji ∆z. � Przykład Weźmy funkcję xyyxz ++= 22 . Niech x0 =1, x=1.1, y0 =2, y =2.1. Obliczymy jej róŜniczkę w punkcie ),( 00 yx i jej rzeczywisty przyrost między podanymi punktami. Mamy
PoniewaŜ dx = dy =0.1, więc dz =0.9. Jak łatwo sprawdzić, przyrost rzeczywisty ∆z =0.93. Obie wartości są więc bardzo zbliŜone. Bardzo waŜna w praktyce jest zaleŜność przybliŜona (por. fragment wykładu o róŜniczce
( ) ( ) ( ) γβα cos,,cos,,cos,,n zyxfzyxfzyxfgrad f zyx ′+′+′=⋅
( )( ) ( )( )000000 ,, yyyxfxxyxfdz yx −′+−′=
( ) ( )dyyxfdxyxfdz yx 0000 ,, ′+′=
( ) ( ) ( ) ( ) 52,12,,42,12, =′⇒+=′=′⇒+=′ yyx fxyyxffyxyxf

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
57
funkcji jednej zmiennej), a mianowicie
� Przykład Obliczymy wartość przybliŜoną 1.052.03. Mamy do czynienia z funkcją typu xy. Przyjmijmy x0 =1, y0 =2, czyli f (x0 , y0 ) =1. PoniewaŜ x =1.05, y =2.03, więc dx =0.05, dy =0.03. Obliczymy pochodne cząstkowe
i ostatecznie
1.103.0005.02105.1 03.2 =⋅+⋅+≈
Wynik ,,dokładny'' podany przez kalkulator wynosi 1.104115, czyli wartość rzeczywista funkcji w punkcie (x , y ) i wartość obliczona wzorem przybliŜonym są podobne. Przedstawione wyŜej zaleŜności moŜna natychmiastowo uogólnić na przypadek funkcji większej liczby zmiennych (wykłady). Ekstrema funkcji dwóch zmiennych NiŜej podany zostanie warunek konieczny i wystarczający istnienia ekstremum funkcji dwóch zmiennych. Szczegóły dotyczące aspektów teoretycznych problemu zostaną omówione na wykładzie. Na rysunku pokazano powierzchnię (funkcję dwóch zmiennych), która w punkcie (x0 , y0 , z0 ) osiąga lokalne maksimum, co oznacza, Ŝe istnieje takie otoczenie punktu P0 , dla którego f (x, y) < f (x0 , y0 ).
( ) ( ) ( )( ) ( )( )00000000 ,,,, yyyxfxxyxfyxfyxf yx −′+−′+=
( ) ( ) ( ) ( ) 02,1ln,,22,1, 1 =′⇒=′=′⇒=′ −y
yyx
yx fxxyxffxyyxf

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
58
Twierdzenie I Warunkiem koniecznym istnienia ekstremum lokalnego (maksimum lub minimum) w punkcie P0 jest, aby w tym punkcie pochodne cząstkowe rzędu I zerowały się
Twierdzenie II Warunkiem wystarczającym istnienia ekstremum w tym punkcie jest, aby wyznacznik
Dodatkowo, jeśli druga pochodna po x (element pierwszego wiersza i pierwszej kolumny) jest w tym punkcie dodatnia, to funkcja osiąga minimum, a gdy ujemna, to funkcja osiąga maksimum. � Przykłady - Wyznaczyć ekstrema funkcji z = x
2 + xy + y2 +x - y + 1.
0,000
=
∂∂=
∂∂
PP y
f
x
f
0
0
2
22
2
2
2
>
∂∂
∂∂∂
∂∂∂
∂∂
Py
f
xy
fyx
f
x
f

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
59
W pierwszej kolejności obliczamy pochodne cząstkowe i przyrównujemy je do zera:
Z liniowego układu równań wyznaczamy x0 = -1, y0 = 1, czyli punktem, w którym moŜe pojawić się ekstremum jest punkt P0 (-1, 1, 0) (trzecia współrzędna wynika z równania rozpatrywanej powierzchni). Bierzemy pochodne rzędu drugiego i tworzymy wyznacznik
PoniewaŜ druga pochodna po x w rozwaŜanym punkcie jest dodania, więc funkcja osiąga w tym punkcie minimum. Przedstawiony przykład był bardzo prosty od strony obliczeniowej, mogą zdarzyć się równieŜ zadania trudniejsze. - Wyznaczyć ekstrema funkcji 2223 52 yxxyxz +++= . W pierwszej kolejności obliczamy pochodne cząstkowe i przyrównujemy je do zera:
Z drugiego równania wynika, _e y = 0 lub x = -1. Na początek, do pierwszego równania wstawimy y =0. Wówczas
Dwa pierwsze punkty, w których moŜe pojawić się ekstremum mają współrzędne P1 (0, 0, 0), P2 (-5/3, 0, ...) - trzy kropki dotyczą współrzędnej z, którą moŜna obliczyć wstawiając x i y do równania powierzchni. Dla x = -1 pierwsze równanie przyjmuje postać
2,204 432 −==⇒=− yyy
Otrzymujemy więc dwa kolejne punkty P3 (-1, 2, ...), P4 (-1, -2, ...).
012,012 =−+=∂∂=++=
∂∂
yxy
fyx
x
f
0321
12>==W
0)1(222,0106 22 =+=+=∂∂=++=
∂∂
xyyxyy
fxyx
x
f
3
5,00106 21
2 −==⇒=+ xxxx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
60
Tworzymy wyznacznik zawierający pochodne rzędu II
W punkcie P1 (x1 =0, y1 =0) wynosi on 20, czyli jest dodatni, a druga pochodna po x jest teŜ dodatnia (10), czyli dla P1 funkcja osiąga minimum. W punkcie P2 (x2 =-5/3, y2 =0) wyznacznik wynosi 40/3, czyli jest dodatni, a druga pochodna po x jest ujemna (-10), czyli dla P2 funkcja osiąga maksimum. W punktach P3 i P4 wyznacznik W (x, y) jest ujemny, a więc w tych punktach nie jest spełniony warunek wystarczający - funkcja nie posiada ekstremum. Pewne informacje o ekstremach funkcji więcej niŜ dwóch zmiennych będą przedstawione na wykładzie.
222
21012),(
++
=xy
yxyxW

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
61
CAŁKA NIEOZNACZONA Rachunek całkowy jest działem analizy matematycznej, którego znaczenie dla nauk technicznych i przyrodniczych trudno przecenić. W ramach wykładu dla studentów I semestru przedstawione zostaną najwaŜniejsze informacje dotyczące obliczania tzw. funkcji pierwotnej, czyli metod wyznaczania całki nieoznaczonej. Dalsze zagadnienia związane z rachunkiem całkowym (całka oznaczona, całki wielokrotne, krzywoliniowe, powierzchniowe itd.) będą przedmiotem wykładów w semestrze II. Wykład dotyczący całki nieoznaczonej obejmuje tylko niektóre typy całek i wybrane metody całkowania. Więcej informacji o tych problemach moŜna znaleźć w obszernych podręcznikach poświęconych rachunkowi całkowemu. Znacznym ułatwieniem dla inŜyniera którego bardziej interesuje wynik, niŜ metody dochodzenia do niego, są liczne dostępne narzędziowe programy matematyczne, zawierające z reguły opcję obliczania całek nieoznaczonych (po zadaniu tzw. funkcji podcałkowej - patrz dalsze fragmenty wykładu - program podaje wzór opisujący funkcję pierwotną). Definicja całki nieoznaczonej
Funkcja f (x) nazywa się funkcją podcałkową, F (x) + C - funkcją pierwotną. Obliczenie całki nieoznaczonej polega na znalezieniu takiej funkcji pierwotnej, która po zróŜniczkowaniu odpowiadać będzie funkcji podcałkowej - rysunek.
Sposób zapisu całki (wydłuŜone S, symbol dx z tyłu) będzie jaśniejszy po zapoznaniu się z
( ) ( ) ( )[ ] ( )xfCxFCxFxf =′
+⇔+=∫ dx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
62
definicją całki oznaczonej. PokaŜemy teraz bardzo prosty przykład. Sprawdzimy, czy prawdą jest Ŝe
Obydwa wyniki są poprawne, bo
Tak więc kaŜda funkcja podcałkowa posiada nieskończenie wiele funkcji pierwotnych róŜniących się stałą, dlatego funkcję F (x) uzupełniamy dodaniem stałej C. � Przykłady - Sprawdzić, czy
Tak, poniewaŜ
- Sprawdzić czy
Tak, poniewaŜ
W praktyce ,,zgadywanie'' funkcji pierwotnej i sprawdzanie jej poprawności przez róŜniczkowanie jest raczej niemoŜliwe, stąd teŜ powstało wiele metod przydatnych do całkowania róŜnych typów funkcji (np. funkcji wymiernych, niewymiernych, trygonometrycznych itd.). Bazą dla tych metod są podstawowe wzory rachunku całkowego.
3dx2,10dx2 22 +=+= ∫∫ xxxx
( ) ( ) xxxx 23,210 22 =′
+=′
+
( ) Cxxx +−=∫ 1lndxln
( )[ ] ( ) xx
xxCxx ln1
1ln11ln =+−=′+−
( )∫ ++= Cxxxx cossin2
1dxcos2
( ) ( ) ( ) xxxxxxxxxCxxx 22222 cossincoscossin2
1sinsincoscos1
2
1cossin
2
1 =−++=−+=′
++

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
63
Podstawowe wzory rachunku całkowego Wzory te są nieco innym zapisem podstawowych wzorów rachunku róŜniczkowego i moŜna łatwo sprawdzić ich poprawność przez obliczenie pochodnej funkcji pierwotnej. I tak
Całkowanie przez podstawienie Metoda dotyczy całek o następującej strukturze
( ) ( )dxdx ∫∫ =⋅ xfCxfC
( ) ( )[ ] ( ) ( )∫ ∫∫ +=+ dxdxdx xvxuxvxu
1,1
1dx 1 −≠+
+= +
∫ nCxn
x nn
Cxx
dxx +== ∫∫
− lndx1
∫ +−= Cxdxx cossin
∫ += Cxdxx sincos
Cx
dxtgx +=∫ 2cos
1
Cx
dxctgx +−=∫ 2sin
1
Cedxe xx +=∫
∫ += Cp
pdxp
xx
ln
∫ +−
= Cx
dxx21
1arcsin
Cx
dxarctgx ++
=∫ 21
1
( )[ ] ( )dxxfxfRI ′= ∫

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
64
JeŜeli podstawimy f (x) = t, to róŜniczka dt = f ′(x) dx i rozpatrywana całka sprowadza się do prostszej, a mianowicie � Przykłady - Obliczyć całkę
Podstawiamy sin x = t, czyli dt = cos x dx i wówczas
RóŜniczkowanie funkcji pierwotnej potwierdza poprawność wyniku. - Obliczyć całkę
Podstawiamy x
3 = t, skąd dt = 3 x2 dx. ,,Dorabiamy'' trójkę w liczniku, czyli
Metoda podstawienia pozwala na waŜne rozszerzenie wzorów podstawowych. Obliczymy następującą całkę
Podstawiamy ax = t, skąd dt = a dx. Rozpatrywaną całkę przekształcamy tak, aby w funkcji podcałkowej pojawiło się a dt, czyli
Postępując w ten sam sposób otrzymamy dalsze uogólnienia wzorów podstawowych:
∫= dxxxI cossin4
∫ ∫ +=== Cxtdttdxxx 5544 sin5
1
5
1cossin
∫ +=
33
2
x
dxxI
Cxtt
dt
x
dxx
x
dxx ++===+
=+ ∫∫∫ 3ln
3
1ln
3
1
3
1
3
3
3
1
33
3
2
3
2
∫= dxaxI cos
∫ ∫∫ +==== Caxa
ta
dtta
dxaxa
dxax sin1
sin1
cos1
cos1
cos

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
65
Wyprowadzenie dwóch ostatnich wzorów jest nieco bardziej pracochłonne, ale elementarne. Zajmiemy się jeszcze całką
w przypadku, gdy wyróŜnik paraboli w mianowniku 0<∆ . Sposób obliczania całek tego typu zostanie wyjaśniony na następującym przykładzie
Pierwsze przekształcenie polegało na zapisaniu funkcji kwadratowej w postaci kanonicznej, następnie podstawiono x - 2 = t, czyli dt = dx i na końcu wykorzystano podany poprzednio rozszerzony wzór podstawowy.
∫ +−= Caxa
dxax cos1
sin
∫ += Cea
dxe axax 1
Cbaxabax
dx ++=+∫ ln
1
Ca
xarctg
aax
dx +
=+∫
122
Ca
x
xa
dx +
=−
∫ arcsin22
∫ ++=
cbxax
dxI
2
( )∫ ∫∫ +
−=
=+
=+−
=+−
Cx
arctgt
arctgt
dt
x
dx
xx
dx
3
2
3
1
33
1
992134 222
Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
66
Całka Eulera Pod tą nazwą kryje się wzór
Wynik uzyskuje się przez pewne, dosyć skomplikowane podstawienie. Sprawdzimy poprawność tego wzoru róŜniczkując funkcję pierwotną
Przedstawione wyŜej rozwaŜania nie wyczerpują problematyki związanej z całkowaniem przez podstawienie. Więcej informacji o tych zagadnieniach moŜna znaleźć w podręcznikach poświęconych rachunkowi całkowemu. Całkowanie przez części Jak pamiętamy, pochodna iloczynu wynosi
PowyŜszą zaleŜność obustronnie scałkujemy
czyli
(jak wiadomo, operacje róŜniczkowania i całkowania funkcji f (x) ,,znoszą się''). Ostatecznie
Ostatni wzór jest wzorem do całkowania przez części (by parts). Wykorzystuje się go do obliczania całek z iloczynu dwóch funkcji, a takŜe do całkowania niektórych funkcji elementarnych, np. ln(#), arctg(#), itd.
Caxxax
dx +++=+
∫2
2ln
axax
axx
axxax
x
axxCaxx
+=
+
++
++=
++
++=
′
+++
22
2
222
2 111
1ln
( ) ( )[ ] ( ) ( ) ( ) ( )xvxuxvxuxvxu ′+′=′
[ ] ∫∫∫ ′+′=′
dxxvxudxxvxudxxvxu )()()()()()(
∫ ∫ ′+′= dxxvxudxxvxuxvxu )()()()()()(
∫ ∫ ′−=′ dxxvxuxvxudxxvxu )()()()()()(

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
67
� Przykłady - Obliczyć całkę
Podstawiamy x = u, czyli u ′ =1. PoniewaŜ v ′ =ex, więc po scałkowaniu v = e
x . Wystarczy teraz skorzystać ze wzoru, aby otrzymać pokazany wyŜej wynik. - Obliczyć całkę
Tutaj dwukrotnie będziemy całkować przez części
- Obliczymy teraz całkę
Przykład ten ilustruje dosyć częsty przypadek, gdy po dwukrotnym scałkowaniu przez części dochodzimy do całki wyjściowej. Wówczas otrzymane przekształcenia traktujemy jako równanie z jedną niewiadomą.
czyli ( ) IxxeI x −+= cossin
skąd
- Podobnie oblicza się całkę
( ) Cexdxeexevu
evxudxex xxx
x
xx +−=−=
==′=′== ∫∫ 1
1
( ) dxxxI cos12∫ +=
( ) ( ) xxxxxxvu
xvxudxxxxx
xvxu
xvxuI sin2cos2sin1
cos1
sinsin2sin1
sin2
cos1 222
−++=−==′
=′==−+=
==′=′+== ∫
∫ dxxex cos
∫∫ −+=−==′
=′==−===′=′== xexexe
xveu
xveudxxexe
xveu
xveuI xxx
x
xxx
x
x
coscossincos
sinsinsin
sin
cos
( ) ( ) CxxeIxxeI xx ++=⇒+= cossin2
1cossin2

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
68
ZauwaŜmy, Ŝe kwadrat cosinusa zastąpiono iloczynem i w ten sposób uzyskano postać dogodną do całkowania przez części
czyli
Jak łatwo sprawdzić, postępując w taki sam sposób otrzymamy
W podręcznikach podawane są wzory dotyczące n-tych potęg sinusa i cosinusa (tzw. wzory redukcyjne). Dochodzi się do nich podobnie, jak w przedstawionym poprzednio przykładzie (patrz: wykłady). Jak wspomniano, metoda całkowania przez części jest równieŜ efektywna przy wyznaczaniu funkcji pierwotnej niektórych funkcji elementarnych. � Przykłady - Obliczymy
- Obliczymy
Całka, która pojawiła się po wykorzystaniu wzoru na całkowanie przez części, została
∫ ∫== dxxxdxxI coscoscos2
( )∫ ∫ −+=−+=+==−=′=′=
= Ixxxdxxxxdxxxxxvxu
xvxuI cossincos1cossinsincossin
sinsin
coscos 22
( ) CxxxIxxxI ++=⇒+= cossin2
1cossin2
( ) Cxxxdxx ++=∫ cossin2
1sin2
( ) Cxxdxxxxvx
u
vxudxxdxx +−=−===′
=′==⋅= ∫∫∫ 1ln1ln1
1ln1lnln
( ) Cxarctgxxx
dxxarctgxx
xvx
u
varctgxudxarctgx ++−=
+−==
+=′
=′== ∫∫ 1ln
2
1
11
11
22
2

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
69
obliczona metodą podstawiania (x2 + 1 = t ). Całki funkcji wymiernych Rozpatrywać będziemy całki typu
gdzie Wn , Wm są wielomianami stopnia n i m, odpowiednio. Do całek tego typu sprowadzają się równieŜ (przez podstawienie) niektóre całki funkcji niewymiernych, trygonometrycznych itd. Pierwszym krokiem algorytmu obliczania całek funkcji wymiernych jest dzielenie licznika przez mianownik. Czynność tę wykonujemy, gdy stopień licznika jest większy lub taki sam, jak stopień mianownika. � Przykłady - Obliczymy
Jak łatwo sprawdzić, wynikiem dzielenia licznika przez mianownik jest
MoŜemy teraz scałkować otrzymany wynik wyraz po wyrazie
- Obliczymy
dxxW
xW
m
n∫ )(
)(
dxx
x∫ −1
3
1
11
12
3
−+++=
− xxx
x
x
Cxxxxx
dxdxdxxdxxI +−+++=
−+++= ∫∫∫ ∫ 1ln
2
1
3
1
11 232

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
70
Jak łatwo sprawdzić, wynikiem dzielenia licznika przez mianownik jest
MoŜemy teraz scałkować otrzymany wynik wyraz po wyrazie
PowyŜsze przykłady zostały dobrane w ten sposób, Ŝe tylko podzielenie licznika przez mianownik pozwalało uzyskać wynik. Drugą częścią algorytmu (w przypadku bardziej złoŜonych mianowników Wm (x)) jest rozkład reszty dzielenia na ułamki proste. NiŜej podane zostaną trzy reguły dotyczące rozkładu na ułamki. 1. Mianownik rozkłada się na róŜniące się między sobą czynniki liniowe. Jako przykład weźmiemy całkę, w której przyjmiemy wyŜszy stopień mianownika, co spowoduje, Ŝe nie ma potrzeby dzielenia licznika przez mianownik: Jak widać, w pierwszej kolejności rozłoŜono mianownik na czynniki. Funkcja podcałkowa mogła być wynikiem dodania do siebie dwóch ułamków
Na razie nie znamy oczywiście wartości A i B. Obydwa ułamki sprowadzamy na powrót do wspólnego mianownika
Wobec równości mianowników, zapewnienie zgodności wyraŜeń ,,na starcie'' i ,,na mecie'' wymaga ,,zgrania'' liczników, to znaczy
∫ +−
dxx
x
1
12
2
1
21
1
122
2
+−=
+−
xx
x
∫ ∫ ∫ +−=+
−=+−
Carctgxxx
dxdxdx
x
x2
12
1
122
2
21)2()1(
32
−+
−=
−−−
x
B
x
A
xx
x
)2()1(
2)(
)2()1(
2
21 −−−−+=
−−−+−=
−+
− xx
BAxBA
xx
BBxAAx
x
B
x
A

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
71
BAxBAx −−+=− 2)(32 czyli
skąd A =1, B =1. Ostatecznie
Obliczymy jeszcze całkę
Jak widać, w pierwszej kolejności rozłoŜono mianownik na czynniki. Funkcja podcałkowa mogła być wynikiem dodania do siebie trzech ułamków
Porównujemy liczniki
skąd A =-1, B =1/2, C =1/2. Ostatecznie
Podsumowaniem tego fragmentu niniejszego rozdziału będzie wzór dotyczący reguły rozkładu na ułamki proste wyraŜenia, którego mianownik moŜna rozłoŜyć na róŜniące się od siebie czynniki liniowe:
−=−−=+
32
2
BA
BA
∫ ∫ ∫ +−+−=−
+−
=−−
−Cxx
x
dx
x
dxdx
xx
x2ln1ln
21)2()1(
32
∫ ∫ +−=
− )1()1(3 xxx
dx
xx
dx
)1()1(
)()(
11)1()1(
1 2
+−−−+++=
++
−+=
+− xxx
AxCBxCBA
x
C
x
B
x
A
xxx
=−=−
=++
1
0
0
A
CB
CBA
∫ ∫ ∫ ∫ +++−+−=+
+−
+−=−
Cxxxx
dx
x
dx
x
dx
xx
dx1ln
2
11ln
2
1ln
12
1
12
13

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
72
gdzie L jest wielomianem stopnia niŜszego od m, A1 , A2 , ... Am są nieznanymi współczynnikami. 2. Mianownik rozkłada się na czynniki liniowe, niektóre z nich powtarzają się. Taka sytuacja ma miejsce, gdy wielomian posiada wielokrotne miejsca zerowe, np. y = x
3 + 2x2 = x2 (x - 2), czyli 0 jest podwójnym miejscem zerowym, a 2 - pojedynczym.
Dla takiego przypadku obowiązuje następująca reguła
gdzie L jest wielomianem stopnia niŜszego od m, A1 , A2 , ... Am są nieznanymi współczynnikami. ZauwaŜmy jeszcze, Ŝe całka z wyraŜenia Ak /(x - xk )
k po podstawieniu x -
xk =t, dx =dt staje się całką elementarną. � Przykłady - Obliczyć
Jak widać, w pierwszej kolejności rozłoŜono mianownik na czynniki. Funkcja podcałkowa mogła być wynikiem dodania do siebie trzech ułamków
Porównujemy liczniki
m
m
m xx
A
xx
A
xx
A
xxxxxx
L
−++
−+
−=
−−−...
)(...)()( 2
2
1
1
21
mm
m xx
A
xx
A
xx
A
xx
L
)(...
)()( 02
0
2
0
1
0 −++
−+
−=
−
∫∫ −−+=
−−+
)2(
)23(
2
)23(2
2
23
2
xx
dxxx
xx
dxxx
)2(
2)2()(
2)2(
232
2
22
2
−−+−++=
−++=
−−+
xx
BxBAxCA
x
C
x
B
x
A
xx
xx
−=−=+−
=+
22
32
1
B
BA
CA

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
73
skąd A =-1, B =1, C =2. Ostatecznie
- RozłoŜyć na ułamki proste wyraŜenie
Mamy
3. Mianownik zawiera funkcję kwadratową (lub funkcje kwadratowe), które nie rozkładają się na czynniki liniowe. Wielomian y = x3 - x2 + x - 1 moŜna po prostych przekształceniach zapisać w postaci y = (x - 1)(x2 + 1). Jak widać, jedynka jest pojedynczym miejscem zerowym, a funkcja kwadratowa x2 +1 nie rozkłada się na czynniki, bo jej ∆ jest ujemna. W taki przypadku prawidłowy rozkład na ułamki jest następujący
gdzie L jest wielomianem stopnia niŜszego niŜ 3. Tak więc, przewidując ułamek posiadający w mianowniku nierozkładalną na czynniki funkcję kwadratową, w jego liczniku umieszczamy funkcję liniową Ak x +Bk . W pierwszej kolejności zajmiemy się całką
przy czym funkcja kwadratowa w mianowniku ma 0<∆ . Po scałkowaniu, w ogólnym przypadku, dochodzimy do sumy ln(#) + arctg(#), a metoda dochodzenia do wyniku jest następująca.
Cxx
xx
dx
x
dx
x
dx
xx
dxxx +−+−−=−
++−=−
−+∫ ∫∫∫ 2ln2
1ln
22
2
)23(223
2
32
2
)3()2(
1
−−++xx
xx
32232
2
)3()3(3)2(2)3()2(
1
−+
−+
−+
−+
−=
−−++
x
E
x
D
x
C
x
B
x
A
xx
xx
11)1()1( 22 +++
−=
+− x
CBx
x
A
xx
L
∫ +++
cbxax
dxBAx2
)(

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
74
1. Przez mnoŜenie, dodawanie i odejmowanie, licznik całki przekształcamy w ten sposób, aby pojawiła się w nim pochodna mianownika. Przykładowo
Chodziło oczywiście o to, aby w liczniku pojawiło się 2x +4. 2. Całkę zastępujemy sumą, licznik pierwszego składnika jest pochodną mianownika
3. Mianownik w drugiej całce sprowadzamy do postaci kanonicznej Ostatecznie
Pierwszą z całek obliczmy podstawiając x2 +4 x + 13 =t, a drugą podstawiając x + 2 =t. � Przykład - Obliczyć
Jak widać, w pierwszej kolejności rozłoŜono mianownik na czynniki. Funkcja podcałkowa mogła być wynikiem dodania do siebie dwóch ułamków
Porównujemy liczniki
∫ ∫∫ ++++=
+++=
+++
134
)242(
2
1
134
)62(
2
1
134
)3(222 xx
dxx
xx
dxx
xx
dxx
∫ ∫∫ +++
+++=
+++
134134
)42(
2
1
134
)3(222 xx
dx
xx
dxx
xx
dxx
∫ ∫∫ +++
+++=
+++
]9)2([134
)42(21
134
)3(222 x
dx
xx
dxx
xx
dxx
∫∫ +−++=
−+−++
)1()1(
)72(
1
)72(2
2
23
2
xx
dxxx
xxx
dxxx
)1()1(
)()(
11)1()1(
722
2
22
2
+−−++−++=
+++
−=
+−++
xx
CAxCBxBA
x
CBx
x
A
xx
xx

Mechatronika - wykłady z analizy matematycznej, prof. Bohdan Mochnacki
75
stąd A =5, B =-4, C =-2. Ostatecznie
Liczenie całek funkcji wymiernych jest dosyć Ŝmudne, ale raczej proste. Trzeba pamiętać o regułach rozkładu na ułamki (jedną z nich pominięto, bo dotyczy bardzo szczególnego przypadku). W ramach wykładów w ,,realu'' omówione będą jeszcze pokrótce niektóre typy całek funkcji niewymiernych i trygonometrycznych.
=−=+−
=+
7
2
1
CA
CB
BA
=+
+−−
=+−
++∫ ∫∫ 1
)12(2
15
)1()1(
)72(22
2
x
dxx
x
dx
xx
dxxx
∫ ∫∫ +++−−=+
−+
−−
Carctgxxxx
dx
x
dxx
x
dx1ln21ln5
12
1
22
15 2
22