Embed Size (px)
Citation preview
M I N I S T E R U L E D U C A Ţ I E I Ş| I N V Ă T A M I N T U L U I .
Conf, dr. P. HAMBURG
Prof. dr. P. MOCANU
Prof. dr. N. NEGOESCU
MATEMATICA FUNCTii COMPLEXE )
EDITURA DIDACTICĂ Şl PEDAGOGICA BUCUREŞTI - 1982
Manualul a fost analizat şi aprobat de colectivul catedrei de analiză, algebră şi geometrie şi de conducerea Facultăţi i de matematică ale Universi tăţ i i „Babeş-Bolyai" din Cluj-Napoca.
Referent ştiinţific : Prof. dr. M. REGHiS
Redactor: Prof. VALENTIN RADU
Tehnoredactor : PARASCHIVA GAŞPAR
Grafician : ANCA PtSLARU
23
Prefaţă
în această lucrare se tratează capitolele de funcţii complexe prevăzute în programa analitică a cursului de analiză matematică ce se predă studenţilor din anul doi de la facultăţile de matematică, respectiv secţiile de matematică şi informatică ale facultăţilor de ştiinţele naturii din învăţămîntul universitar. Manualul este de asemenea util tuturor studenţilor de la facultăţile sau secţiile din învăţămîntul superior, care au prevăzute în programele analitice de matematică unele capitole de funcţii complexe.
în cele şapte capitole ale manualului sînt prezentate sub o formă accesibilă şi în acelaşi timp riguroasă noţiunile, metodele şi rezultatele fundamentale ale teoriei funcţiilor complexe, precum şi miele aplicaţii ale acestei teorii în diferite domenii ale ştiinţei şi tehnicii.
Autorii s-au străduit să selecteze şi să sintetizeze într-un spaţiu restrîns elementele de bază ale uneia dintre cele mai dezvoltate discipline matematice, la care şcoala românească de matematică a adus importante contribuţii.
Redactarea capitolelor şi paragrafelor a fost făcută de către autorii acestui m%nu%l după cum urmează : Gap. I, Gap. II, § 5 {Gap. III) şi § 2 {Gap. V) -N. Xegosscu {Univ. „Al. I. Guza" Iaşi); §§ 1 — 4 {Gap. III), §§ 1,3 {Gap. V) şi Gap. VII - P. Ham-burg (Univ. Graiova); Gap. IV şi Gap. VI — P. Mocanii {Univ. „Babeş-Bolyai" Gluj-Napoca).

CUPRINS
CAPITOLUL I. iVuniere complexe § 1. Corpul numerelor complexe . 7 § 2. Forma algebrică a numerelor complexe 8 § 3. Operaţia de conjugare. Modulul unui număr complex . . . . . 9 § 4. Argumentul unui număr complex 10 § 5. Planul complex 13 § 6. Planul complex extins şi reprezentarea lui sferică 16
CAPITOLUL II . Funcţii olomorfe § 1. Noţiunea de funcţie complexă 20 § 2. Limite şi continuitate 21 § 3. Drumuri în C 21 § 4. Funcţii complexe derivabile de o variabilă reală 25 § 5. Derivata unei funcţii complexe de o variabilă complexă . . . . 26 § 6. Funcţii olomorfe 30 § 7. Exemple de funcţii olomorfe pe C (funcţii întregi) 33 § 8. Funcţi i omografiee 35 § 9. Funcţii raţionale 38 § 10. Aplicaţii multivoce 39 § 11. Interpretarea geometrică a derivatei 40
CAPITOLLL III . Integrarea funcţiilor complexe § 1. Integrala complexă 46 § 2. Teorema lui Cauchy 56 § 3. Formulele lui Cauchy 64 § 4. Formulele lui Schwarz şi Poisson 74 § 5. Integrarea formelor diferenţiale de gradul lntîi 78
CAPITOLUL IV. Şiruri şi serii de funcţii olomorfe § 1. Şiruri de funcţii olomorfe 89 § 2. Serii de puteri 91 § 3. Analiticitatea funcţiilor olomorfe 95 § 4. Zerourile unei funcţii olomorfe. Teorema identităţii funcţiilor
olomorfe 100 § 5. Teorema maximului modulului 102 § 6. Serii Laurent 105
5

§ 7. Puncte singulare 189 § 8. Funcţii meromorfe 115
CAPITOLUL V. Teorema reziduurilor § 1. Teorema reziduurilor 117 § 2. Calculul unor integrale definite cu ajutorul reziduurilor . . . . 121 § 3. Studiul funcţiilor meromorfe cu ajutorul reziduurilor 134
CAPITOLUL VI. Reprezentarea conformă § 1. Mulţimi de funcţii olomorfe 139 § 2. Funcţii univalente 143 § 3. Problema reprezentării conforme 146 § 4. Reprezentarea conformă a domeniilor simplu conexe. Teorema lui
Riemann 148
CAPITOLUL VII. Prelungirea analitică § 1. Prelungirea analilică 153 § 2. Suprafeţe riemanniene 160
IXDEX 164 BIBLIOGRAFIE 167

C A P I T O L U L I
NUMERE COMPLEXE
în acest capitol se reaminteşte construcţia numerelor complexe ca perechi ordonate de numere reale. Cum din punctul de vedere al analizei matematice planul este mulţimea perechilor ordonate de numere reale, numerele complexe se identifică cu punctele P ale unui plan euclidian (cu metrica d : R x R - > R + definită prin ă(P1,P2) = Y(xz—x1)~ + {y2—yir, unde P1 şi P 2 au coordonatele (x±, y±) şi (o:2, y2) respectiv), numit planul reprezentativ ăl numerelor complexe sau planul complex. Această interpretare geometrică a numerelor complexe ajută ia formarea de modele intuitive şi dă sugestii pentru demonstrarea unor teoreme. în ultima parte a capitolului, se compactifică corpul C al numerelor complexe cu un număr şi se arată că planul complex extins este omeomorf cu sfera unitate şi se dă interpretarea geometrică a acestui omeomorfism. Menţionăm că în acest capitol introductiv se amintesc şi se comentează rezultate cunoscute din cursurile de algebră şi analiză. Se insistă, în special asupra definiţiei argumentului unui număr complex, fără a folosi intuiţia geometrică şi asupra comp act ificării planului complex. Pentru elementele de topologia planului complex se folosesc sisteme fundamentale de vecinătăţi formate din discuri centrate în puncte.
Notăm cu N, Z, Q, R respectiv mulţimea numerelor naturale, inelul întregilor, corpul numerelor raţionale şi corpul numerelor reale. Convenim să notăm cu N*, Z*, Q*, R* aceleaşi mulţimi de numere care nu includ pe 0 şi cu Q+, R+ mulţimea numerelor raţionale pozitive (0 inclus) respectiv mulţimea numerelor reale pozitive (0 inclus). Pentru operaţii cu mulţimi vom folosi notaţiile uzuale A u B, A d B, A\B, A x B pentru reuniune, intersecţie, diferenţă, produs cartezian al mulţimilor A şi B. A x A se va nota cu A2.
Menţionăm că în acest capitol se urmăreşte, de asemenea, de a se stabili unele notaţii unitare ce vor fi folosite în întregul manual.
§ 1. CORPUL NUMERELOR COMPLEXE
1.1. Definiţie. Fie R2 produsul cartezian al perechilor ordonate (x, y) de numere reale. Definim pe mulţimea R2 operaţiile de adunare şi
7

înmulţire prin
Ou Ui) + O2,2/2) = Oi + %2, yx + y^,
O l , 2/l) 0 2 ) 2/2) = («1 «2 — #1^2) ^ 2 + *2^l)-
Prin definiţie, mulţimea numerelor complexe C este mulţimea R2 dotată cu aceste operaţii de adunare şi înmulţire. Prin urmare, prin C înţelegem tripletul (R2, + , .).
1.2. Propoziţie. C este corp comutativ. în adevăr, din proprietăţile operaţiilor de adunare şi înmulţire pentru numere reale rezultă imediat că operaţiile introduse în C sînt comutative, asociative, înmulţirea este distributivă faţă de adunare şi (0,0) şi (1,0) sînt elemente neutre pentru adunare şi respectiv înmulţire, (—as, —y) este opusul lui (x, y) pentru că (x, y) + {—x, -—3/) = (0,0). Opusul elementului 2 = 0 , y) se notează CU ——#.
De asemenea, orice element z e C\{(0, 0)} = 0* are invers, pentru că ecuaţia {x, y) (xx, yx) = (1, 0) cu (x, y) # (0, 0) este echivalentă cu sistemul compatibil în xx şi yx: xxx — yyx = 1, yxx + xyx — 0. Deci, inversul lui z — (x, y) e C* este (xx, yx) = (xj(x2 + y2), — yj(x2 + y2)) e C*. Inversul elementului z se notează cu —. •
Evident, în C şi C* se pot defini operaţii inverse celor introduse în (1.1). care se numesc respectiv scădere şi împărţire.
Corpul comutativ C=(R2. +,.) se numeşte corpul numerelor complexe şi elementele lui se numesc numere complexe.
§2. FORMA ALGEBRICĂ A NUMERELOR COMPLEXE
1.3. Propoziţie. Mulţimea Rx{0} = {(a;, 0); i e R J c C dotata cu, operaţiile din C este un subcorp al lui C iar aplicaţia 9 : R -» Rx{0}, unde <pO) — O; 0); es^e un izomorfism de corpuri.
Evident 9 este o bijecţie care păstrează operaţiile :
cp(xx + x2)= cpCiPj) + <p(x2), cp(xx-x2) — <Ş(XX)-(D(X2). •
Izomorfismul 9 ne permite să identificăm R X {0} cu R aşa că putem considera R ca o submultime a corpului C şi putem scrie x în locul perechii (x, 0). Astfel numerele complexe (0,0), (1,0) (—1,0) se identifică cu 0 ,1 , — 1 din R.
Xotînd cu i numărul complex (0,1) avem următoarea : 1.4. Propoziţie. Orice număr complex z=(x, y) sepoate reprezenta în
mod unic în forma x + iy, unde x, y e R, iar i e C şi i2 = — 1 . Expresia x + iy se numeşte forma algebrică a numărului complex
O, ii)-1.5. Observaţie. Definiţiile adunării şi înmulţirii date în (1.2) «i*
trebuie memorate pentru că ele urmează imediat ţinînd cont că C este corpul comutativ al numerelor z = x + iy, unde x, y e R şi i2 = —1
8

în adevăr,
(«i + m) + («2 + m) = Xi + xz + i(z/i + y%) Şi
(xx + iyx) (x2 + iy2) = xxx2 + ixxy2 + \yxx2 + i2yxy2 =
= xxx2 — yxy2 + i(xxx2 + x2yx).
§ 3. OPERAJIA DE CONJUGARE. MODULUL UNUI NUMĂR COMPLEX
1.6. Definiţii. Dacă z = x-\-iţj este un număr complex, atunci x, y, x—iy şi (x2-\-y2)1/2 se numesc respectiv jartea reală, partea imaginară; conjugatul şi modulul lui z, ele se notează cu Re z, Im z, z şi \z\.
1.7. Propoziţie. Oricare ar fi numerele complexe z, zx, z2 avem următoarele proprietăţi de bază :
1) Re 2 = —(z + z) si Im.s = — (z — z), 2 2i
2) zx + z2 = zx
3) — \z\ < R e z < | # ] şi — j £J<Im 0< | z\, \z\-
4) | z î2 = » şi — = J— dacă » # 0.
5) | Z | = 0 <=> 2 = 0, j 5^, | = | Z± | |2 a | , I % + «2 i < I 1 I + I ~2 I-
Demonstraţie. 1) rezultă prin adunare şi scădere a relaţiilor x + \y = z şi x — \y — z. Proprietăţile 2), 3) şi 4=) se verifică imediat. Primele două propoziţii din 2) arată că operaţia de conjugare 0 -> z este un izomorfism al lui C pe C, adică operaţia de conjugare este un automorfism al lui C. Ultima proprietate din 2) exprimă că operaţia de conjugare este involutivă. Prima relaţie din 5) rezultă din definiţia modulului. Pentru a demonstra relaţia a doua folosim 4) şi avem
I Z1Z2 i — (^1^2) (%^2,' — Z1Z2Z1Z2 — (~l^J.) (^2^2) — \Zl\ ' I ^2 I •
Cum modulul est-e pozitiv, prin extragere a rădăcinii pătrate se obţine relaţia a doua din 5). Deoarece zx~z2 = zxz2 urmează zxz2 + z2zx = 2Re(.cr~2) şi avem
1.8. | zx + z2|2 = (% + *2) {*,. + »a) = I % i2 + 2Re (%i2)]+ | 0a ,2
Observind eă Re (zxz2) < | | \z2\ din prima formulă 3) şi extrăgmd rădăcina pătrată, obţinem ultima inegalitate 5),numită inegalitatea triunghiului. •
9

1.9. Observaţie. Menţionăm că în corpul C al numerelor complexe nu se introduce nici o relaţie de ordine. Prin urmare relaţia zx < z% cu zu 0 2
£ C nu are sens. Aplicaţia z i-»- i este un automorfism involutiv (propoziţia 1.7) care
invariază pe R. în cazul z e R automorfismul se reduce la aplicaţia identitate.
1.10. Observaţie. Se arată imediat că primele două relaţii din 2) se extind la un număr finit de termeni sau factori, zx — #2 —% — ^z Şi O^i/^a) =
— ^i/s3 pentru 22 T6 0. De asemenea ultimele două relaţii din 5) se extind la un număr finit de factori sau termeni.
Procedînd ca la demonstrarea formulei (1.8) obţinem
1 1 1 I » ^ |2 — I „ 12 QTSii (y v \ 4 - \ c 12 -L-J-J-- . | * i «2 1 — P i l ^ " e l n * 2 J I \ZZ\
şi inegalitatea
1.12. | |%! - | * a | | < | % - ^ 2 | .
Mai amintim relaţiile
1.13. j zx + 0, |2 -f I % — z2 j2.= 2(1 % |2 + | z212) (legea paralelogramului).
1.14. ! — ! = -!^-L pentru z, ^ 0 şi ' e ^ ' < \z\ < [ Rez| + | Imz j . I 02 I \zz\ | Imz j
Formulele (1.13) rezultă din adunarea membru cu membru a formulelor (1.8) şi (1.11). Eelatiile (1.14) sînt imediate. Vom folosi des aceste inegalităţi.
§4. ARGUMENTUL UNUI NUMĂR COMPLEX
Pentru a defini argumentul unui număr complex avem nevoie de definiţii analitice ale sinusului şi cosinusului care să nu apeleze la intuiţia geometrică. Metoda adoptată foloseşte proprietăţi simple ale integralelor definite şi ale celor improprii.
y
Considerăm funcţia impară a : K ^ R definită prin : a.(y) = 2 V dt i i +P o
2 Avind x'(y) = — - — > 0 pentru orice y£ R. funcţia a este strict creseă-
1 + y2
4-co
toare, deci injectivă. Integrala \ —•—- fiind convergentă, lim x(y) este o
finită şi pozitivă. Vom nota cu - acest număr. Cum lim a.(y) = — n, a realizează o bijecţie de la R la ]—n, + ~ [. Fie (3 = a - 1 : ] — n, it[ -> R inversa ei. a avind derivata nenulă $ va fi şi ea derivabilă.
10

1.16. Definiţie. Notăm cu e : ] — n, + t [ -*• C funcţia definită prin e(6) =—•—cLi . Evident I e(9) | = 1 si în particular e(0) = 1. Funcţia e
1 - 1(3(9) se prelungeşte prin continuitate pe intervalul închis [—n, -}--] punînd
i , x T /AX T 1 + i3(9) ,. 1 + iy -, -r, . e(±") = lim e(9) = Iun —'—[—^ = hm = — 1 . Putem acum ex-
e^±7i e->±~ 1 — i[3(6) y-»±<» 1 — iy
tinde definiţia funcţiei e la R prin periodicitate : 1.17. e(6 + 2ir) = e(8).
în intervalul O e ] - - , +TÎ [aveme'(8) — (l-ip(8))« a'(y)(l~iyf . 1 + Î/2 . 1 + iy . 1 4- i3( 0) , o/ox -n •
= î • == i '—-- = i -±—- unde w = 3(9). Prin urmare : (1-iy2) 1-iy 1 — 1,3(6)
1.18. e'(8) = ie(8), valabilă pentru 9 e R\{(2fc + l)n; Jc& Z}. Funcţia e fiind continuă pe [iz — e, - + s] şi derivabilă pe ] 7r — s, ~ [ U ] ~, ~ + s[ putem aplica teorema lui Lagrange la dreapta şi la stînga lui -pent ru funcţiile u = w(6) şi v =v(Q), partea reală şi partea imaginară a funcţiei e :
1 19 g£?! + e) ~ e ^ _ u^ + £) ~ »(~) . j vi~ ± s) ~ ^(") =
= i*'^) + it>'(62) = i('(9i) + iw'(8i) + y, unde 8X, 62 e ] - , TC + e[ şi
lim y = 0. Deci e'(7t) = lim e'(81) = —i.
Analog, e'(—n) = — i. Prin urmare (1.18) e valabilă şi în 9 = $3~ deci şi pentru orice 0GR.Q
1.20. Propoziţie. Funcţia f= a.e unde » e C satisface ecuaţia diferenţială f = i/. Reciproc dacă f : R -> C şi f' = if, atunci /(8) = /(0)-e(8). în particular f(0) = 1 implică f= e. Funcţia e admite următoarea teoremă de adunare :
e ( i x + 92) = e(01)-e(82). / V e-i/-/-ie Prima parte este evidentă. Dacă / ' = i/, atunci ( — I
e-0. Deci pentru orice 9 e R avem f(0)/e(6) = f(0)/e(0) = f(0). Formula
de adunare rezultă de aici punînd f( 6) = e( 91 4- 9) : avînd f = if si f(0) = = e( 9,) rezultă că e( Qx + Q) = e( 9,) • e( 9). Q
1.21. Definiţie. Numim cosinus respectiv sinus, pe care le notam cu eos şi sin partea reală respectiv imaginară a funcţiei e, adică pentru orice I e R avem e(9) = cos 9 -j- i sin 9. Separînd părţile reale şi imaginare în formula (1.18) obţinem formulele de derivare (cos 9 ')= —sin 8, (sin 9)' = = cos 9.
1.22. Propoziţie. Aplicaţia 9 i-> cos 8 -f- i sin 9 este un omomorfism al grupului aditiv R pe grupul multiplicativ al numerelor complexe £ cu |£j = 2, nucleul acestui omomorfism (subgrupul numerelor 9 astfel ca «os 9 4- i sin 0 = 2) este mulţimea tuturor multiplilor întregi ai lui 2
II

Prima parte rezultă din propoziţia precedentă e (6X + 03) = e( 01)e( 02). Ecuaţia e( 0) = 1 este satisfăcută pentru 0 = 2kn, unde h e Z ceea oe rezultă din observaţia că sin 0 > 0 pentru 8
3TC ] 7t 3TC C e —, . şi gin 0 < o pentru 0
cos 0 < 0 pentru
. Prin urmare e (0) ^ 1 2 ir 2 '
pentru 0 e] 0,2TC[ şi din cauza periodicităţii 0 = 21c n cu h e Z sînt singurele numere care satisfac ecuaţia cos 0 + i sin 0 — 1.
1.23. e(01) = e(02) <*01— 02 = 2&7r(&e Z) conform ultimei relaţii din (1.20).
Acum putem defini argumentul. Dacă ^==5 + i>) cu |C| = i , atunci ecuaţia e(0)= £ are o soluţie unică în ] — TC, TC]. în cazul t > 0,
Vi
r di yje[—l, 1] argumentul 8 al lui £ este dat de 8 = 2 \ - . Pentru
o c < 0, 7) e [—1, 1] ecuaţia e(0) = 5 are soluţia 0 + TC. In baza propoziţiei (1.22), putem da următoarea definiţie generală a argumentului.
1.24. Definiţie. Pentru orice număr complex z ^ 0 orice soluţie 8 a ecuaţiei cos 0 + i sin Q = z/\z\ se numeşte argument al numărului complex z.
Din definiţie rezultă că pentru z = 0 nu corespunde nici un argument şi că oricărui număr complex z£ C*îi corespund o infinitate de argumente. Mulţimea argumentelor lui z s C* se notează cu Arg z şi se numeşte clasa argumentelor lui z. Argumentul trebuie înţeles ea o aplicaţie multivocă de la C* în P(R), adicăjArg : C*^ P(R), unde Ârg (C*) este o mulţime i c P ( R ) cu fiecare element de forma {8 + 2A;TC : it £ Z}, 8 fixat din ]— TC, TC].
1.25. Definiţie. Funcţia arg : C*->- ] —TC, TC] care are ca valoare soluţie unică 6 s ] —-, TC] a ecuaţiei e(0) = zj\z\ se numeşte argumentul principal al lui z şi se notează cu arg z (notat cu a)
Aplicaţia multivocă Arg (notată cu A, notaţie preluată de la aplicaţii multivoce şi care va fi folosită şi în continuare în analiza complexă) se defineşte prin relaţia Arg Z = {arg z -f 2Â;TC ; Tc e Z}, ceea ce se scrie
1.26. Arg z = arg z{moă 2TC).
1.27. Observaţie. Din formula (1.23) şi prin verificări simple obţinem Arg (01-02) = Arg zy + Arg z.2, Arg {zl!z2) = Arg zx — Arg z2, arg z = Q •*> <*• Re z > 0 şi Im z = 0, arg z = - -**• Re z < 0 şi Im z = 0.
1.28. Observaţie. Ecuaţia din definiţia (1.24) ne permite să dăm o reprezentare trigonometrică a oricărui număr complex z din C* prin formula 1.29. z = | z | (cos 0 + i sin 8), unde 0 e Arg z
1.30. Aplicaţie. Ecuaţia binomă zn = a (unde a # 0 este dat) este echivalentă cu | z | = | a \1,n şi Arg z — — Arg a = — (arg a + 2&TC) ceea ce
dă n soluţii complexe zk—\ a\1/n j cos — (arga+2ftn:)-^i sin —(arga+2fc7t) j , _ \ n n )
fee 0,»—1. Această aplicaţie pune în evidenţă că, în (1.29), trebuie să punem 6 e Arg » şi nu 8 = arg. z.
12

1.31. Aplicaţie. Din ultima formulă din (1.20), obţinem formulele cos(e i-r82) = cos B1 cos 62—sinOi sin 03, s i n ^ - f 02) = sinOjCosaa+cosOiSinOa.
1.32. Observaţie. Din formulele (1.29) şi (1.27) pentru zx # 0, z2 ^ 0, rezultă
.v i . - , o ^ i [008(0! + 02) + i s i n ^ + 82)], unde Q1e Arg 2 , 82 £ Arg .?„ şi 0" = 12|" (cos n8 + i sin n%), pentru zi- 0, 0 e Arg » şi «, e JT.
Ca un caz particular al acestei ultime relaţii obţinem formula lui Moivre: 1.34. (cos0 + i sin 8)" = cos n0 4- i sin «0.
6 5. PLANUL COMPLEX
1.35. Definiţii. Conform definiţiei (1.1) avem C = (R2; + , .) şi prin urmare, orice număr complex z = (se, y)= x + \y este un element din R2, adică este un punct al spaţiului aritmetic real bidimensional. Avind în vedere că R2 se identifică cu spaţiul euclidian bidimensional (planul euclidian), întregul limbaj geometric relativ la R2 se transferă în mod natural asupra corpului C.
Putem vorbi deci despre planul C, despre punctul z e C şi despre o mulţime de puncte (o figură geometrică) A c C. Astfel, mulţimea părţilor reale x = Re z ale tuturor numerelor complexe se numeşte axa reală, mulţimea părţilor imaginare se numeşte axa imaginară. Mulţimile de puncte z pentru care Re z < 0, Re s > 0, Im z < 0, l m s > 0 se numesc respectiv semiplanul stîng, drept, inferior, superior al planului complex. Se mai introduc semiaxele reale, negative şi pozitive şi semiaxele imaginare, negative şi pozitive. O dreaptă ave ecuaţia « = «-(- bt cu a e C, J e C * fixe şi t parcurgînd R (trece prin a şi este paralelă cu Ob). Ecuaţia dreptei se scrie şi în forma Im (z — a)lb = 0. Mulţimea {2 e C : Im (z — a)jb > 0} se numeşte, prin convenţie, semiplanul stîng, şi mulţimea {z £ C ; Im (z — a)jb<0} se numeşte semiplanul drept.
Unghiul dintre două drepte z = aL-\-b1t şi z = a2 — b.4 este definit ca Arg b2!b1, el depinde de ordinea în care sînt date dreptele şi are o infinitate de valori reale sau trebuie interpretat ca un număr real modulo 2- .
Xotmd cu 0=arg (Ox, Oz) şi folosind .asemănarea triungbiurilor OPM~OAZ, avem -X = r cos0, y = r sin9, de unde z=r (cos 9 — + isin6). Comparînd cu definiţia analitică :a argumentului (după 1.23) şi cu formula (1.29). obţinem interpretarea geometrică .arg z : cos 8 = OP, sin 0 = PM, | z | şi arg numărului complex z (r şi 6).
Sectorul unghiular S^Jy.^ oc2) este prin definiţie mulţimea punctelor
Fig. 1.35
pentru cos 9, sin 0, | z | şi sînt coordonatele polare ale
< a2. Dezavantajul .argumentului lui z este că are un salt de la — ~ la - cînd z traversează semi-'¥=zn care satisfac inegalităţile a, < arg
13

axa reală negativă. \z1 — z2\ = ]f(x1 — x2)2 + (y1 — y2)2 prin definiţia modulului din (1.6) dar membrul doi în planul euclidian R2 reprezintă distanţa d(«1? z2). Pentru triunghiul cu vîrfurile în zx, z2, z3 avem inegalitatea triunghiului: \zx — zz\ < | z1—z2\ + \z2 — z3\ cu interpretarea geometrică : lungimea unei laturi este mai mică sau egală cu suma lungimilor celorlalte două laturi. Interpretarea geometrică a formulei (1.13) (legea paralelogramului) enunţă un rezultat geometric cunoscut, că suma pătratelor lungimilor laturilor unui paralelogram este egală cu suma pătratelor lungimilor diagonalelor.
1.36. Structura metrică şi topologică a corpului C Mulţimea {z e C; | z—z0 j < r} se numeşte disc centrat în z0 de rază
r> 0 si se notează cu V(z0 ; r). Convenim să notăm cu U(z0; r) mulţimea. U (z0; »*)\{20} şi să o numim disc punctat centrat în z0 de rază r. Mulţimea {z 6 G; r1 < \z—z0j < r2} se numeşte coroană circulară centrată în z0 de raze i\ şi r2 şi se notează cu U(z0 ; t\, r2). Se vede că U(z0; r) =U(z0; 0, r). O submultime G a lui C se numeşte deschisă dacă este vidă sau, în caz contrar, oricare ar fi z0 e G există un disc U(z0; r) <= G. Evident C şi orice disc sînt mulţimi deschise. O submultime F a lui C se numeşte închisă dacă este complementara unei mulţimi deschise. Deoarece C = = c0, 0 = cC urmează că C şi 0 sînt şi închise. Se demonstrează simplu că orice reuniune de mulţimi deschise este deschisă, orice intersecţie finită. de mulţimi deschise este deschisă. Prin urmare, familia mulţimilor deschise este o topologie pe C. Această topologie este indusă de metrica d(.q, z2) — = \z1—z2\. Mulţimile finite şi mulţimile F = {z e C ; \z— zQ\ < r} şi Fll2 = {z G C ; i\ < \z—z0\ < r2} sînt închise pentru că complementarele lor sînt deschise.
O submultime A a lui C se numeşte mărginită dacă există un disc Z7(0 ; r) astfel încît A c U{Q; r).
Se numeşte segment cu punctul iniţial % şi punctul final z2 mulţimea [%, z2] = {ze C ; z = z1~ t{z2 — zx), t e [0,1]}. O submultime A a lui C se numeşte conexă dacă nu există nici o submultime a sa nevidă diferită, de A care să fie simultan deschisă şi închisă în A considerată ca subspaţiu al lui C. Reuniunea a două discuri disjuncte este o mulţime neeonexă.. O submultime a lui C deschisă şi conexă se numeşte domeniu. Convenim <ţa domeniile să fie notate cu D. Se vede că U (z0 ; r) şi tj(z0 ; r) sînt domenii, Segmentele din C nu sînt domenii pentru că nu sînt deschise.
Fig. 1.36 a Fig. 1.36 b
Un domeniu D din C se numeşte domeniu stelat în raport cu ~, £ i> dacă pentru orice z e D segmentul [z0, z] <= B. Un domeniu stelat în raport cu orice punct al său se numeşte domeniu convex.
Se vede imediat că orice disc U(z0; r) este domeniu stelat şi convex. Discurile punctate U{z0; r) sînt domenii dar nu sînt convexe şi nu există
14

nici un punct zx e tr(z0 • r) în raport cu care să fie stelat. U{zx',rx) u U V(z2; r2) este domeniu stelat dar nu este convex. (Figura 1.36).
Un punct z0 e C se numeşte punct aderent pentru, A c C dacă pentru. orice U{z0; r) avem TJ(z0; r) n -A # 0 . Un punct « 0eC se numeşte de acumulare pentru I c C dacă pentru orice U(z0 ; r) avem U{z0; r) n i . ^ 0 . ? 0 e t se numeşte yimci frontieră pentru i c C dacă pentru orice U{z0; r) avem Î7(«0; r) fi A. # 0 şi Z7(20; r) ncA^0. Mulţimea punctelor aderente ale lui A se numeşte aderenţa sau închiderea lui J. şi se notează cu A. Mulţimea punctelor de acumulare ale mulţimii A se numeşte derivata mulţimii A şi se notează cu A'. Mulţimea punctelor frontieră ale tui A se numeşte frontiera mulţimii A şi se notează cu BA. Avem Ac A, A = = A u A', 8A — A ncA. Se demonstrează următoarele teoreme de carac
terizare : 1) o mulţime A c C este mărginită dacă şi numai dacă orice şir (zn) <= A conţine un subşir convergent ; 2) o mulţime F c C este închisă dacă şi numai dacă pentru orice şir (zn) c _F convergent avem lim 0„ e F;
_ n-*op
3) .A este închisă dacă şi numai dacă A = A. Se vede imediat că U(z0; r) = = U(z0; r) = {z eC ; j z—z0 ;<?'}, 8U(z0; r) = {0 eC ; ' z — z0. = r}. O mulţime i c C 8e numeşte compactă dacă orice şir (zn) cz A conţine un subşir convergent către un punct z0 e A. Se demonstrează că o mulţime A a C este compactă dacă şi numai dacă este mărginită şi închisă, imaginile continue ale mulţimilor compacte (conexe) sînt compacte(conexe) şi orice şir Cauchy din C este convergent, ceea ce arată că C este spaţiu metric complet.
în cele ce urmează sînt utile unele rezultate privind distanţa (nu metrica) de la A la B, ă(A, B), definită prin ă(A, B) = inî {d(a, b); a e A, b e B). Mulţimile A = {(x, 0) ; x e R} şi B == {(a?, e*); a; 6 R} din R2 sînt închise şi disjuncte totuşi ă{A, B) = 0. a e i ^ â f ? , -4-)=0-
1.37. Propoziţie Bacă mulţimea A este compactă, B închisă, A şi B •nevide şi A n B = 0, atunci d(A, B)>0. Fie funcţia f : C -> R definită prin f (z) = d(z, B) care se vede uşor că este continuă. Deoarece A n B = 0 şi L' este închisă rezultă î(z) > 0 pentru orice z e J. (în caz contrar z& B — B, contrazice ipoteza i f l i = 0) . Fiindcă J. este compactă există un punct .z0, conform teoremei lui Weierstrass, astfel încît f(s0) = mî{î(z) ; z£ A) = = A(A, B). Deci avem 0 < î{z0) = ă{A, B).Q
1.37.1. Bacă G este deschisă şi K este un compact inclus în G, atunci d(K, 8G)>0. Se aplică proprietatea (1.37), unde K este compact şi 8G este închisă. Evident d(K, cG) = d(j6T, 8G) > 0. n
1.37.2. Bacă G este deschisă şi K este un compact inclus în G, atunci -există un număr finit de discuri U(zk; r) cu r < d(I£, 8G) şi k e 1, n,
n
astfel încît U(zk, r)cG şi K<= {_} U{z,:; r). Alegînd r < &(K, 8G), oricare ar _ 1
fi z e K, U(z, r) c G şi mulţimea discurilor { U{z, r); z e K] este o acoperire •deschisă a lui K. Aplicînd teorema lui Borel-Lebesgue rezultă că există un
n număr finit de puncte z} e K, j e 1, n astfel încît [_) U(z}; r) => K. •
1
1.38. Reprezentarea ea vectori a numerelor complexe. Numărul complex z poate fi reprezentat în planul complex prin vectorul Oz. Număr, punct şi vector vor fi notate cu aceeaşi literă z. Dacă Ozx şi Oz2 sînt dife-
15

riţi de vectorul nul din R2 = C, vectorii Oz reprezintă suma, diferenţa, produsul şi cîtul lor, în figurile următoare :
Pentru a prezenta geometric produsul şi citul numerelor :x şi z2, adică zxz2 şi 3\\%z • considerăm punctele z astfel ca să avem respectiv următoarele asemănări de triunghiuri : (0, 1, z j ~ (0, z2, z) şi (0. 1, sx) ~ ~ (0, z, z%), unde triunghiurile sînt indicate prin vîrfurile lor.
§6. PLANUL COMPLEX EXTINS Şl REPREZENTAREA LUI SFERICĂ
în diverse probleme de analiză complexă este necesară extinderea. mulţimii C a numerelor complexe prin adăugarea unui număr impropriu notat cu co. Prin definiţie C<» = Cu {oo} şi oo s C.
Legătura numerelor din C cu elementul co se stabileşte prin extinderea la acest element a operaţiilor cu numere complexe punînd a — co =• = co -f- a = co şi a-co = co-a = co pentru a e C^/jO}. Prin convenţie-specială (referitoare la operaţia de împărţire) vom scrie : a/0 = co pentru a e Coo\{0} şi a/co = 0 pentru « e C . Este imposibil de a defini co — oor O.co, 0/0, co/co. Deci în ce priveşte structura algebrică a lui Cm se pot extinde operaţiile algebrice din C, fără a fi peste tot definite. Convenţia, j oo | = -j- co extinde modulul de la C la Cco.
1.39. Definiţie. C ca mulţime fiind identificat cu planul euclidian., mulţimea Ce» o vom numi planul complex extins. Pentru a lămuri comportarea punctului impropriu faţă de figurile geometrice elementare eon
i i

venim ca să considerăm pe oo ca element al oricărei drepte din £«,- în schimb oo nu aparţine nici unui cerc şi nici unui semiplan.
Pentru a satisface dezideratul de mai sus şi a elucida convenţiile de la punctul (1-39), este de dorit să introducem un model geometric în care toate punctele planului extins să aibă reprezentanţi concreţi. Pentru acest scop considerăm sfera unitate S2 a cărei ecuaţie în spaţiul R3 euclidian este x2 + y2 + u2 = 1- Fiecărui punct P de pe S2 îi asociem un număr complex din Coo prin relaţia
1.40 z — <Ş>(x, y, u) \y — dacă (x, y, u) # (0, 0,1), 1 -
co dacă (x, y, u) = (0, 0, 1)
1.41. Propoziţie. Bacă notăm N = (0, 0, 1) e R3 şi <p este restricţia la S2\{N] a aplicaţiei O definite prin egalitatea (1.40), atunci $ este un omeomorfism de la 8^\{N} la C
Demonstraţie. 1) Aplicaţia este bijectivă. în adevăr, cum u < 1, avem
x + iy , 2, a? -}- it/ x — iy __ x2 -f y2 _ 1 — u2 _ 1 + u 1 — ii 1 — u 1 — u (1 — u)2 (1 — w)2 1 — a
de unde w= (| z\2—1)/( [0|2+1) şi 1 — « —2/(j,?j2 + 1). Deoarece z + z = == 2#/(l — H), » — 2 = 2it//(l — w), obţinem
1.42. O"1(0) = (a;, y, u) = ( Z + Z , —^^—> [*\ ~ *) pentru \l+\z\2 i ( l+ |* |» ) 1 + | 0 | V
oriee * e C 2) Aplicaţia din propoziţie este continuă în orice punct s0(x0, y0, u0)e
e S2\{N} = S2- Dacă s0 e £2 atunci
,. , v ,. ® + iv A"n + iya
hm z(x,y,u) = Îmi ~ = r r = z(xo, ^ uo)-
3) O - 1 este continuă pentru orice s e C pentru că evident lim tp-1(z) = = <5-1(20), ceea ce rezultă din continuitatea funcţiilor de z şi 5 din formula (1.42). •
1.43. Propoziţie. Bacă notăm AT'=(#, 0, —l)e R3 şi <Ş>1: 8Z\{N'} ->C e definită de $i(*i, ^, «•) = — , atunci (^1 este un omeomorfism de
1 + u la £3 \{3T '} la C.
Demonstraţia este similară cu cea precedentă, unde % se înlocuieşte cu AT'.
1.44. Interpretarea geometrică a omeomorfismelor <& şi ^>x Punctele N, P, z au respectiv următoarele coordonate : (0, 0, 1),
(x, y, u), (xv yx, 0), unde N, P sînt pe 82 Şi z în planul complex. Ecuaţiile • y -rr T T -i
dTeptei NP sînt — •=— = . Intersectând drepta NP cu planul x y u - l
2-t . «M 61 17

U = O, atunci X
y
Vi
Şi 2/i =
+ iy)l(l — u) sau
= yv şi avem —^ = — = x y u
x -\- iy
— 1 adică xx •
xx + \yx -• 1 ' " l—u,
. Deci punctele N, P ş i 0 = (« -f u 1 — w
w) sînt coliniare şi aplicaţia O este o proiecţie centrală din centrul AT(0, 0,1)-, cum se vede din figura 1.44. Ea se numeşte proiecţie stereografica de centru N de la S2\{N} pe planul complex C. Aplicaţia «l se interpretează geometric ea proiecţia stereografica i e centru N' de la 82\{N'} pe planul complex C. Se vede că pentru orice punct {x, y, u) s &82\{N, A'} avem zz' = 1.
1.45. Topologizarea lui C<». La sistemele fundamentale de ve
cinătăţi formate din toate discurile centrate in orice z^C, adăugăm un sistem_fundamental de vecinătăţi al punctului de la infinit format din {Coo\r(0; r), r > 0 } = {00} u {z eC ; | s | > r } cărora le corespund pe 82 calote deschise centrate în N, generalizări ale discurilor din plan. Acum putem enunţa :
1.46. Propoziţie. Aplicaţia O definită în (1.40) este un omeomorfism de la S2 la Coo •
1) Continuitatea aplicaţiei d> în (0, 0.1) rezultă din faptul că
N'(0,0,-1) Fio. 1.44
; <!>(#, y, u)\>r>l este
0( x. y, u) | > r > 1 <s> t t>
= ){£, y, u) e.6'2; u>-
echivalentă
1 cu
00 + w\ 1 — u I
a > r2, adică r±
r*
1 — w Aceasta ara tă că O-1(C«>\0 :(0 ; r)) =
adică O - 1(Coo\î7(0, r)) este o vecinătate r* +1 j
deschisă din ^ a punctului (0, 0, 1). Cum Ccx>\?7(0. r) este deschisă, O""1 duce mulţ imi deschise dintr-un
sistem fundamental de vecinătăţ i ale punctului de la infinit în mul ţ imi deschise ale unui sistem fundamental de vecinătăţ i ale punctu lu i (0, 0,1) e 82. Deci O este continuă pe 82.
2) <E>_1 este continuă şi în z = 00, deoarece lim 0~1(z) =
= lim (- — 1 \ 1 i(l + |z|2) 1
= (0, 0, 1) = <D-I(oo). Evident bicon-
t inui ta tea în celelalte puncte este demonstrată în (1.41). • 1.47. Sfera S2 înzestrată cu omeomorfismele <1> si Ox se numeşte
sfera lui Riemann. Se poa te a ră ta că proiecţia stereografica duce cercurile de pe S2 care nu trec prin N (intersecţia sferei S2 cu un plan care nu trece prin N) în cercuri din C şi reciproc. De asemenea, proiecţia stereografica aplică cercurile de pe 82 care trec prin N în drepte din planul complex extins (vezi (1.39)).
1.48. Definim acum distanţa între punctele z şi z' din C^ ca lungimea coardei PP' în R3 , unde P şi P' sînt ®~l{z) şi <b~\z') Dacă P(x, y, u) şi
18

P'(x',y', ti') atunci dis tanţa aceasta, numi tă distanţă cordală întrepunctele z, z' şi no ta tă cu dc(z, z') defineşte o aplicaţie dc : Cco X Cco -> [0,2] şi avem dc(z, z')2={x—x')2+(y—y')2 + (u — u')2'=2 — 2{xx' + yy' — im').
Folosind formulele (1.42) pent ru x, y, u şi x', y', u', obţinem dc(z,z') = 2| z z'\ ' ' 2
oricare ar fi z, s ' e C şi dc(z, co) = -( l + | « | 2 ) 1 / 2 ( l + jS'j2)l/2 • ( l + |0J2)l/2 oricare ar fi z e C. De aici rezultă că (Coo, d0) este un spaţiu metric deoarece dc(z, z') — 0 •» g = z', ăc(z, z') = dc(z', z) şi dc{z, z') < dc(z, z") + + dc(z", z') oricare ar fi z, z', z" e Ca,
Se poate a ră ta că topologia spaţiului metric (Ce», dc) coincide cu cea definită la (1.45).
1.49. Corolar. SpaţiiM metric (Coo, d0) este compact. î n adevăr, S2 <= R 3 fiind compactă (mărginită şi închisă în R3) şi
aplicaţia O de la 82 pe Cco continuă, urmează că Coo este compact pen t ru că aplicaţiile continue păstrează compacti tatea.
1.50. Observaţii. Se vede că avem relaţiile
Ac( — ! — I = dc(z. z') şi d. I — , co I = oricare ar fi z. :.-' e C. \z z'j ' C U ) (1+M2)1/2
2' ^ %< | Dacă A este o mulţime mărginită clin C, adică A<= £7(0, R), atunci— <
1 + E°-< dc(z, z') < 2\z — z'\ oricare ar fi z, z'e A.
1.51. Pentru a studia o funcţie / într-o vecinătate a punctului co rom considera q = f o fc unde lc(z) = —
» Cum A'transformă o vecinătatea lui 0 într-una a lui co, prin compor
tarea lui / la exi vom înţelege comportarea lui g în 0. .
19
C A P I T O L U L I I
FUNCŢII OLOMORFE
§ 1. NOŢIUNEA DE FUNCŢIE COMPLEXA
2.1. Dacă A = [a, b] este un interval real atunci prin f : [a, b] -* C înţelegem o funcţie care asociază fiecărui punct t din [a, b] un număr complex şi numai unul î{t) — x(t) + ip(£) din C. Aceste funcţii complexe de o variabilă reală au fost deja folosite în capitolul întîi la definiţia argumentului unui număr complex. Continuitatea şi derivabilitatea lor sînt echivalente cu cele ale perechilor de funcţii reale (a, (3) de variabila reală t& [a, b]. Există însă şi proprietăţi care diferă de cele de la funcţii de o variabilă reală. Funcţiile complexe continue de o variabilă reală îşi găsesc utilitatea la noţiunea de drum.
2.2. Dacă A este o mulţime de numere complexe (A c C), atunci f : A -> C reprezintă o funcţie f definită pe i c C cu valori în C, adică o funcţie complexă de o variabilă complexă.
Dacă z este un element din A, atunci valoarea lui f în z se notează cu î(z) şi funcţia se mai notează prin z H-> Î{Z). Valoarea funcţiei complexe în z se poate scrie
f(z) = u(z) +iv(s) ,
unde a(z) şi V(Î) sînt numere reale şi astfel z >-> XL(Z), .SI-* V{Z) sînt funcţii reale. Xumim u partea reală a funcţiei î şi v partea imaginară a lui i şi notăm u = Re f. v = Im f.
Deoarece z= x -\- iy, unde x şi y sînt numere reale, atunci putem scrie
^ = f(2) = f(x + iy) = u(x, y) + iv(x, y),
eonsideiincl u şi v ea funcţii de două variabile reale x şi y. Funcţia i se interpretează geometric ca o transformare punctuală a unei mulţimi din planul (z) în planul (w).
2.3. Pentru funcţiile complexe de o variabilă complexă existenţa derivatei pe o mulţime deschisă G este o condiţie mai restrictivă decît cea relativă la funcţiile complexe de o variabilă reală; ea are implicaţii
£"

profunde în proprietăţile de structură ale funcţiilor. Cercetarea consecinţelor existenţei derivatei constituie tema centrală a analizei complexe.
2.4. Pentru o funcţie complexă derivabilă pe o mulţime deschisă fîcC vom adopta denumirea de funcţie olomorfă pe G. Se va arăta că orice funcţie olomorfă pe un domeniu D este restricţia la D a unei funcţii analitice globale (vezi Capitolul VII).
§2. LIMITE Şl CONTINUITATE
2.5. Definiţie. Se spune că funcţia f : A -> C(A c C) are limita l în punctul a, şi se scrie lim f (z) = l, dacă şi numai dacă pentru orice s > 0 există un număr vj > 0 cu proprietatea că
ze A, 0 < \z — a! < 7) => [î(z) — l\<e.
Există variante obişnuite ale definiţiei care corespund cazului cînd a sau l este infinit. în cazul complex sînt mai puţine variante de acest fel din cauză că există un singur punct la infinit. Se menţin toate rezultatele privind limita unei sume, a unui produs sau a unui cît cînd numitorul este diferit de zero, ca la funcţii reale de o variabilă reală.
Condiţia lim î(z) = l este echivalentă evident cu lim î(z) = l. Din acestea urmează că lini î(z) = l este echivalentă cu lim Re f (z)='Rel şi lim Im î{z) — Im l.
2.6. O funcţie f : A -> C se numeşte continuă î n 2 0 E i c C dacă lim î(z) = t(z0). Dacă f este continuă în toate punctele lui A, atunci spunem că f este continuă pe A.
Suma şi produsul a două funcţii continue sînt continue, cîtul a două funcţii continue este o funcţie continuă în z0 e A dacă numitorul este diferit de zero în z0.
Continuitatea lui f esfce echivalentă cu continuitatea funcţiilor Re f şi Im f. De asemenea continuitatea funcţiei f implică continuitatea funcţiei jf J, deoarece din formula (1.12), scrisă pentru i[z) şi î(z0) obţinem ||*(*)l - |«*o)ll .<Jl*(*)-f(*o)l-
Limitele şi continuitatea pentru funcţii pot fi definite şi prin şiruri deoarece C are proprietatea că fiecare punct are un sistem fundamental numărabil de vecinătăţi format din discuri centrate în acest punct.
§3. DRUMURI ÎN C
2.7. Definiţii. Un drum în C este o aplicaţie continuă y a segmentului [0,1] în C. Punctul y(0) se numeşte punctul iniţial al drumului iar y(l) se numeşte punctul final sau punctul terminal al drumului, y([0,l]), imaginea segmentului [0,1] prin y, se numeşte suportul drumului y şi se notează cu {y}, unde {y} = (y(i) e C : * S [0,1]}.
21

Dacă Y(0) = y(l), spunem că drumul y este închis. Un drum închis frecvent folosit este drumul circular y definit prin y(£) = 20 — rezm şi pe care îl vom nota cu S ?7(*0; r). Vom nota cu S> (%, «2) mulţimea tuturor drumurilor din C cu punctul iniţial % şi punctul final z2.
Un drumyin G (ffcC) se defineşte în mod analog înlocuind Cpxin G. Se numeşte deformaţie continuă (în sens larg) a drumului Yi : [0.1] -» 67 în drumul y2 : [0,1] -» 67 o aplicaţie continuă w : S X T -+ G astfel încît 8 = T = [0,1] şi 9(0, i) = Yi(<), ?(1? *) = Ya(f) 'pentru i e [0,1]. în acest caz, fiecare s e [0,1] defineşte un drum ys : [0,1] -*• G, adică yt(t) = = cp(s, t). Fie Yi şi Y2 două drumuri din mulţimea drumurilor în 6?. Spunem că drumul yx este omotop în sens larg cu drumul y2 în 6? şi scriem •;1 ~ ya dacă există o deformaţie continuă în G a lui y-, în -/„. Relaţia ,,7=-" se-numeşte relaţie de omotopie în G (în sens larg).
2.8. Propoziţie. Relaţia de omotopie în sens larg este o relaţie de echivalenţă. Ea este reflexivă, deoarece dacă y este un drum din 67, atunci 9 : 8 X T ~* 67 definită prin o(s, t) = y(t), este o deformaţie continuă a lui y în y.
Relaţia de omotopie este simetrică întrucît dacă Yi şi Y2 aparţin mulţimii drumurilor din 67 şi 9 este o deformaţie continuă a lui Yi în y3 atunci ^i S x T -+ G definită prin 9x(s, t) = o(l — s. t) este o deformaţie continuă a lui y2 în yv
Relaţia de omotopie este tranzitivă deoarece, dacă yx, y2, y3 sint trei drumuri din mulţimea drumurilor din G iar <pj (respectiv 92) este o deformaţie continuă a lui yi in Y2 (respectiv y2 în y3), atunci aplicaţia 9 : 'S X T -> G{8 = I = [0,1])'"definită prin
, „ [0,(25. f) dacă s e [0,1'2], o(s , i) = JT1V ' • ,
l 9 2 (2 , s - l , i) dacă s e [1/2,1]
este o deformaţie continuă a lui yt în y3. • 2.8.1. Mulţimea drumurilor y din 67 care au extremităţile fixe
zi Şi z2 (punctul iniţial zx şi punctul final »2, evident zv z2 e 67) se va nota cu @e(zv z2).
Dacă Vi, Y2e ®G{ZU ^a); atunci yi(0) = y2(0) = ^ şi YX(1) = y2(l) = = 22 şi, prin definiţie, y1 este omotop eu y2 în t7 şi notăm yx Q. y2 dacă există o deformaţie continuă o a lui yt în y2, definită în 8 X T cu valori in (7 astfel încît 5 ='T = [0,1], 'cu 9(0, t) = Yi(*)> <p(l> 0 = Va (f) pentru 0 s; ? s= 1 şi <p(s, 0)=y1(0)=y2(0), <p(s, l)=y1(l)=Y2(l), altfel spus, pentru orice se [0, 1], drumul ys : [0, 1] -> 6f are aceleaşi extremităţi ca drumurile yx si y2.
Se arată că şi relaţia de omotopie ,, -g- " este relaţie de echivalenţă (ca în propoziţia (2.8)).
2.9. Definiţie. Dacă y2 e ££ (2 , #3), y2e ® (»3, 23), drumul notar cu Yx U y3 definit prin
fY Uy)(t)=hi(2t) d a c ă t£ [0,1/2], 1 | y 2 ( 2 i ~ l ) dacă ie [1/2,1],
se numeşte compunerea drumului y1 cu drumul y2. Evident yx u y2 e ®(^15 îg) iar y2 u YJ are sens numai dacă punctul final al drumului y2 coincide cu
22

punctul iniţial al drumului yv Deci, în general, operaţia ,, u " nu este comutat ivă şi nici asociativă.
2.10. Definiţie. Dacă Yi e 0(«i, £2), Ta e ®(02>
03)> • • • > Y»e ^(2»> 0»+i)>
a tunci , pr in definiţie, Yi U y2 U • • • U y» e s t e drumul y definit pr in y(£) = = (Yi U Y2 U • • • U yfc U . . . U y„)(Z) = {:fk+i(nt — fc), pent ru *£[£/», (fc-f 1)/»] ; fc e 0. •» — 1}.
2.11. Definiţie. Fie y u n drum şi A = (t0, tv . . ., tn) o diviziune a lui [0 ,1 ] . Sistemul de drumuri (yx, y2, . . ., y j se numeşte descompunerea lui y asociată diviziunii A, unde yft = yo 7tfc şi pent ru fiecare fc e 1, n, Tik : [ 0 , 1 ] -» -> [**_u fe] este omeomorfismul liniar crescător definit pr in 7 (2) = 4--i + + *(** - h-%). Se vede că {y,} = ( Y . J , ) ( [0 ,1]) = Y([**-I» «*])•
2.12. Lemă. Dacă y esie «•» drum în 67 şi f o aplicaţie continuă a segmentului [0,1] pe el însuşi, astfel încît /(0) = 0 şi / ( l ) = 1 atunci drumul y2 = -- c / es?e omotop cu drumul y. Se vede că cp : $ X T -> C, S = T = = [0, 1] definită prin ş(s, £) = y[< -f- s(f(tf) — i)] este o deformaţie cont inua a lui y în yx. D
2.13. Propoziţie. Bacă y esie wra ărttm din 67 şi (yx, y3, . . . , y„) esie •o descompunere a lui y, atunci drumul y esie omotop în 67 cu drumul yxUy2U . . . U T . -
Fie 0 = £0 < ^ < . . . < t„ = 1 diviziunea A a lui [0, 1] care a generat descompunerea (y^ y2, . . ., y„). Xot înd cu 7ifc omeomorfismul liniar crescător al segmentului [0 ,1 ] în [4_i , h] definit pr in hk(t) = 4 _ x -f- t(tk — h^) avem Yi u y2 U . . • U yB = Y°(^i U Â2 u . . . U h„). ^ o t î n d cu h = \ U h.2 U U . . . U hn avem fe(0) = 7^(0) = 0, Ji(l) = Jin(l) = 1 şi 7i([0,1]) = [0, l ] .
Aşadar li este o aplicaţie continuă a segmentului [0, 1] în el însuşi şi avem ca în (2.12), y ~ y°fe = T l U y 2 U . . . U y„. D
2.14. Propoziţie. Dacă Yi e ^ G ( S D ZO), y2 e ^ G ( » 2 , *3), y3 e ^G(23 , 24) atunci avem (y1u y2) U Y3-<rYLU (y2U Y3)- Fie h omeomorfismul crescător a l .segmentului [0,1] pe [0,1] definit pr in h(i) = 2t pent ru te [0,1/4], Ji(t) = t+ll4 pent ru i e [1/4, 1/2], h(t) = ( l+*) /2 dacă i e [1 /2 ,1] . Se verifică simplu relaţiile
(Yi U y2) U y3 = [Yi U (ya U Y3)] ° n -g- (Yi U Y2) U Y3- D
2.15. Definiţie. Dacă y e 3G(zv ~2)> atunci notăm cu y~ drumul definit pr in y~(t) = y(l — t). Drumul y~ se numeşte inversul drumului y.
Propoziţie. Dacă yv y, e 0o(#i> 02) cn Yi -^ y2, atunci ~i\ ~g Yâ~- Dacă
•<p este o deformaţie continuă de la y2 la y2, a tunci aplicaţia o~ : S X T -> G, definită prin <p~(s, £) = o(s,l — t) este o deformaţie continuă a lui y{~ în yi". Deci Yf-yYr- •
2.16. Definiţie. Pen t ru orice « e 67 se notează prin ez d rumul definit p r i n ez(i) = z. Ev iden t e2 6 @G(z, z). Un drum y e $>&{?, z) se numeşte omotop cu zero în 67 dacă y -^ ej (y omotop cu u n drum punctua l z).
Propoziţie. Pentru orice y ES>G(Z, Z) avem ea u y -5- y. Dacă f : [0,1] -> „ . . - . 1 £. . .- . „/JN f0 dacă t e [ 0 , 1 / 2 ] , . . ,
-> [0,1] este definita prin l(t) = 1 L ' ' a tunci f este } 2 Z - 1 dacă «e [ 1 / 2 , 1 ] ,
cont inuă şi avem e2 u y = y ° î. Din (2.12) urmează QZ U y -g- y. Q
23
2.17. Propoziţie. Bacă yv y2 e 3)G (zv z2) şi y: ~ y2, atunci Arumul Ti U yi" este omotop cu zero în G.
®(s, t) y1(2ts) dacă te [0, 1/2]
y2(2(l — t)s) dacă i e F—, 1
este o deformaţie continuă a drumului eZi în ya U yf. Prin urmare y ^ yf este omotop cu zero în G. •
2.18. Printre drumurile ££(% 22) se găseşte drumul dat de aplicaţia I H - 2 J + f(22 — zx) al cărui suport este segmentul [z1} z2]. El se numeşte drumul liniar din ^ fo , £2)>
s a u drumul liniar de la z1 la #2. Un drum y pentru care există o descompunere formată din drumuri liniare se numeşte drum poligonal. O mulţime A se numeşte poligonal conexă dacă oricare ar fi zv z2e A există un drum poligonal y s @(zv z2) astfel încît {y}<= A.
2.19. Propoziţie. Orice domeniu B este poligonal conex. Fie z0 un punct oarecare din B şi să notăm cu GZt mulţimea punctelor ze B astfel încît există un drum poligonal y în B inclus în &{zw z). Mulţimea GZt este deschisă căci dacă z e Gtt c B, există U{z, r) c B. Dumul liniar y1 e 2{z. z'), pentru orice z' G U(z, r), este din U(z, r) şi y u yi este în B. Deci pentru orice ze Gu există U(z, r)aGZt, adică GZt este mulţime deschisă şi nevidă. Dacă (zn) c GZt este convergent la ze B, atunci pentru un anumit e > 0 există n G N astfel încît zn e JJ(z, s) c B. Dacă notăm cu y„ drumul poligonal în D din 2(zw zn) şi cu y drumul liniar din 2(zn, z), atunci drumul yn U y este în B deci z e GZI şi, prin urmare, GZt este şi închisă în B. GZl fiind simultan deschisă şi închisă în domeniul B care este conex, urmează Gz, = B. •
Aceeaşi demonstraţie arată că orice domeniu B din C este conex prin drumuri sau arce.
2.20. Definiţie. Un domeniu B se numeşte simplu conex dacă orice drum închis din B este omotop cu zero în B.
2.21. Propoziţie. Bacă B este un domeniu din C stelat în raport cu unul din punctele sale, atunci B este simplu conex.
Dacă B este stelat în raport cu z0 G B, atunci pentru orice drum y e ^ ^ o , z0) considerăm aplicaţia 9 : S X T -*• B, cu 8 = T = [0,1] definită prin cp(s, t) = 20 + s[y(i)— * 0 ] . Se vede că 9 este o deformaţie continuă în .£> a drumului y în drumul e2o. Dacă z e B, atunci drumul închis y u  U Â-, unde "/. este drumul liniar de la z la z0, este situat în B. Aşadar y este omotop cu zero in B. •
2.22. Definiţie. Fie ya şi y2 două drumuri din C. Spunem că ,,-A, «s£e echivalent cu y2" dacă există un omeomorfism crescător li al intervalului [0,1] pe [0,1] astfel încît y2 = yx°h.
Evident că două drumuri echivalente au acelaşi suport. Reciproca acestei afirmaţii nu este însă adevărată. în adevăr, drumurile y, şi y2 definite prin yx(/) = t şi y2(t) = t(2t — l ) 2 sînt două drumuri din ^(0,1) care au ca suport comun segmentul [0,1]. Ele nu sînt însă echivalente, deoarece funcţia t i-s» t{2t — l ) 2 nu este bijeetivă.
24

Se observă că relaţia definită mai sus este reflexivă, simetrică şi tranzitivă, deci este o relaţie de echivalenţă, care va determina o împărţire in clase a tuturor drumurilor din C.
Numin curbă o clasă de drumuri echivalente, iar prin suportul unei curbe vom înţelege suportul unui drum oarecare din această clasă.
§ 4. FUNCŢII COMPLEXE DERIVABILE DE O VARIABILĂ REALĂ
Cazul unei funcţii complexe de o variabilă reală derivabilă pe un interval (a, b], pe care'l-am întâlnit chiar din capitolul întîi şi de care avem nevoie şi mai tîrziu, se reduce la cazul real. Dacă funcţia f : [a, 5] -+ C este
frţ\ frţ \ definită prin î(tj — <x.(t) + iB(i), atunci no tind prin t'(t0) — lim — — .
t->h t fg dacă limita există, rezultă î'(t) = <x'(i) + iB'(i) pentu te [a, b]. Existenţa lui f este echivalentă cu existenţa simultană a derivatelor a' şi B'. Notaţia complexă are nu numai avantaje formale.
2.23. Teoremă. Bacă î : [a, &]-> C este derivabilă pe [a, 0] şi î'(t) = 0 pentru orice te [a, b] (derivabilă la dreapta în a şi derivabilă la stînga in b) atunci i este o constantă pe [a, &].
în adevăr, f'(t) = 0<*• <x'(t) = p'(f) = 0 pentru orice te [a, b~\, ceea ce implică c/.(t) = cv 3(«) = c3 pentru orice te [a, b]. Deci i(t) = c1-\-ic2 (o constantă complexă) pentru orice t e [a, &]. •
2.24. Observaţie. Teorema creşterilor finite a lui Lagrange nu este adevărată pentru toate funcţiile complexe de o variabilă reală. î n adevăr dacă ea ar fi adevărată pentru Kt) = t2 + ii3 în intervalul [a, b] cu a < b atunci î(b)-i(a)=î'{c)(b-a) cu ce]a, b[, adică b2+ib3~a2—ia3={2c + 3c2i)(b~a). Egalind părţile reale şi complexe obţinem b2 — a2 — 2c(b — a), bz — a3 = = 3c2(b~a) sau b + a = 2c, a2 + ab + b2 — 3c2, de unde eliminînd pe o obţinem a2jrab-\-b2 = 3l sau (a —5)2=0, ceea ce conduce la a—b,
ce contrazice ipoteza a<b. • Totuşi există două variante mai slabe pentru teorema creşterilor
finite a lui Lagrange date în teorema următoare : 2.25. Teoremă. Bacă [a, b~\ este un interval din R şi f o funcţie com
plexă pe [a, b] continuă pe \a, b], derivabilă pe ] a, &[, atunci există un punct o s ] a, b[ şi un număr complex a au | a | < 1 astfel încît : 1) |f(6) - f ( o ) | < |f'(c)| (b -a) şi 2) î(b) -î(a) =aî'(c)(b - a). Considerăm funcţia reală q> pe intervalul [a, b~\ definită prin o(t) = la(t) + + mâ(t), unde l = Re[f(6) ~î(a)], m = Im[f(6) — f(a)], a = Ref, B = Imf. Evident <p este continuă pe [a, b] şi derivabilă pe ~\a, 6[. Aplicînd teorema creşterilor finite, rezultă că există ce ] a, 6[, astfel încît
2.25.1. 9(6) - <p(a) = (b - a) <p'(o). Deoarece <p(6) — <p(«) =Z[a(6) —a(a)] -Jr m[B(&) —S(a)], iar Z=a(&) — «(o), m =3(&)_jî(a), obţinem <p(6) —<p(a) = |f(6) - f (a) / 2 . în t rucî t <p'(<0 = Z«'(o) +
25

-f mŞ>\e); aplicînd inegalitatea lui Schwarz deducem |cp'(c)j< \rlz -j- m2* •V[«'(c)]2 + [ ?'(c)]2 = | f(6) - f(«)! |f'(c) ]. Deci
| f(6) - f(a) |2 = 9(6) - ţ>(a) = (b - a)<p'(c) < (& - o)| f(6) - t(a) | | f'(c) |,
de unde prin simplificare cu |f(6) — f ( a ) | > 0 obţinem formula 1). În cazul î(b) — î(a) formula 1) rămîne valabilă. Din formula 1) urmează
t(b)-l(a) < 1 . f'(c)
Să notăm numărul din membrul întîi cu ~. -. este real < 1. Atunci
f (6)- f (o) 1 , , , . . , , - i-i — = T (cos i + i sm di).
f'(c) b—a Dacă notăm cu a numărul complex din membrul doi, obţinem
t(b) — f(ffl) = <jf'(<?)(&—a) cu T complex şi |CT| = X < 1. O Observaţie. Pentru determinarea numerelor c din teorema (2.25) se
foloseşte ecuaţia (2.25.1). Determinarea numărului a se obţine din relaţia 2) din (2.25). Un
calcul simplu pentru exemplul din (2.24) în cazul a= — 1, b — l dă , 1 ( , 1 \ . 2 , . . 3 . 2 / 3 . . , 1/2Î ^ ,
c = i ^= J Y ± -7= I = ct-?= + 1 Şl cr = — ui —— i cu <r = < 1. ]/3 ' l Y3) ^ F 3 7 7 7
Deci pentru î(t) = t2 + ii3 şi intervalul [— 1,1], formula 2) pentru cele două» valori ale lui c si cele două valori respective pentru a dă identităţile
2 i = i £ ± i & ; v ± l | T i ) 2 .
§5. DERIVATA UNEI FUNCŢII COMPLEXE DE O VARIABILĂ COMPLEXĂ
Pentru funcţia f : G -> C, unde 67 este deschisă în C, notăm Ref şi Im f cu u şi v, deci f = u + iv. Dacă z = x + iy e G, vom scrie î(z) = = u(2) + iv(2), sau f(2) =u(a?, y) -+- iv(#, y). Funcţia f poate fi privită ca» o funcţie complexă de două variabile reale, sau ca o funcţie complexă de o variabilă complexă.
2.26. Definiţie. O funcţie complexă f : G -> C, cu 67 deschisă în C, se numeşte R-ăiferenţiabilă (sau diferenţiabilă în sensul analizei reale) în punctul z0 = x0 + iy0 e 6? dacă există două numere complexe Aj şi A2 şi o funcţie complexă fx : 67\{20} -» C astfel încît lim fa(is) = O şi pentru orice
r-»r0
0 = x + iy£ 67\{»0} să avem 2.26.1. f(*) = f(*0) + Ax(x - a>0) + A2(t/ - y0) + îx{z) \ z - z01. Se observă imediat că dacă f este R-diferenţiabilă în z0 = x0 — i w0 £ (7,
atunci f are derivate parţiale de ordinul întîi în z0 şi ele sînt egale respectiv cn
8î , . du . . . . &V , . , Sf , , du , . , . dv . , . -T— (*o) = " T - (*o) + 1 T " W = Av V— (so) = V— (so) + 1 — - («oi = ^ 2 -c ^ <?# 8x oy cy 8y
26

Se arată uşor că funcţia f este R-diferenţiabilă în z0 = x0 + iy0 e & dacă şi numai dacă funcţiile reale u şi T sînt diferentiabile în punctul 0-V Va)-
2.27. Definiţie. O funcţie complexă f : G->C, cu G deschisă în C, se numeşte ăerivabilă în punctul z0eG dacă funcţia zt->[î(z) — î(z0)]l(z — z0), definită pe G\{z0}, are limită în C în punctul z0. Această limită, dacă există, şe numeşte derivata lui f în punctul z0 şi se notează cu f'(^e)-
2.28. Definiţie. O funcţie complexă f : G -> C, cu G deschisă în C, se numeşte diferenţiabila (sau C-diferenţiabilă, sau încă diferenţiabila în sensul analizei complexe) în punctul z0 e G dacă există un număr complex a şi o funcţie complexă ^ pe 6?\{20} astfel încît lim Uz) = 0 şi pentru orice z = x-\-iyz G\{z0} să avem
2.29. f(0) = î(z0) + a(* - zg) + Uz) (z - z0). 2.29.1. Observaţie. Se vede uşor ca, luînd : "i
î(z) - î{z0) - Ax{x - x0) - A2(y - y0) dacă z e 67\{20}, «*)= \—o\
[ 0 dacă z = z0, respectiv
î(z)-î(z0) a dacă z e G7\{0O} Uz) = j s - »o
<• 0 dacă 2 = 20,
se obţin definiţii echivalente cu cele date în 2.26 şi 2.28 de diferenţiabi-litate, astfel încît îx să fie continue in z0 şi Uzo) = 0-
2.30. Propoziţie (de caracterizare pentru funcţiile derivabile). O funcţie î : G — C, unde G este deschisă în C, este ăerivabilă în z0 e 67, dacă şi numai dacă î este diferenţiabila in z0.
Necesitatea. Dacă f este derivabilă în z0 e 67 şi fie a derivata lui f în z0. Notăm cu £[ funcţia definită pe 67 prin
f(z)-f(z0)
fi(*) pentru » # »0,
0 pentru z = z o-
Se vede eă fa este continuă in 20, lim f1(?) = 0 şi satisface, pentru orice «e £, relaţia (2.29).
Suficienţa. Dacă f este diferenţiabila în z0 e (7, atunci pentru orice z£& avem relaţia (2.29), din care obţinem - ^ —^- = a+f1(0). Deoarece
Ihn Uz) — 0? urmează că f este derivabilă în zQ şi avem î'(z0) = a. Q 2.31. Teorema lui Cauehy-Riemann (de caracterizare pentru func
ţiile derivabile). O funcţie î — u + iv : 67 -> C, !*ra?e 67 este deschisă în C,
27

este derivabilă în z0eG dacă şi numai dacă funcţia complexă f este R-dife-renţiabilă în punctul z0 e G şi derivatele parţiale ale funcţiilor reale uşix de variabilele x şi y satisfac relaţiile :
. or> 8u 8v- . du 2.32. —— (»0) == -=— («o) Ş1 ~
cx cy 8y (*.) =
3v 3 a;
(*<>)•
Necesitatea. Dacă f este derivabilă în 20 £ 6?, atunci, conform propoziţiei (2.30), f este diferenţiabilă în z0, adică există un număr a e C şi o funcţie îx continuă în za cu f^o) = 0 astfel încît să avem (2.29) sau, punînd în evidenţă că f = u + iv, a = xx + ia2, f1==u1 + ÎY1 şi 0—z0 = = a; — a;0 -f- \{y — y0) şi egalînd părţi le reale şi imaginare în (2.29), obţinem
2.33. u{z) = u{z0) + ^x~x0) — cti{y—y0)+u1{z){x—xi)—r1{z){y—y0),
2.34. v(z) = Y(z0) + <x2{x—x0) + o^(y--y0)+v1{z)(x~x0)+u1(z)(y~y0),
unde <xv <x2 e R , f 1 = a 1 + ivx, u1 ; vx sînt continue în 20 cu u ^ o ) = v1(^0) = 0, unde xv a2 6 R, fx = ux + iv1; lini ux(z) = lim vx(#) = 0 şi
i?) — — f,(0) = (g)(ff — a?0) Vi(g)(y — y0) 1
o! I» — « o l J I» ' 'O I
respectiv.
fx(») = v1(g)(a; — x0) Uţjz) (y - y0) | Z — Z I I 0 — £ 0 |
\Z — Z OU
adică u şi v sînt R—diferenţiabile în 20 din 6r. Din relaţiile (2.33) şi (2.34) urmează că u şi v sînt R—diferenţiabile în
. . . du , . du , . <3v i3v (^o> #o) Ş1 ^— («0) = «i> («0) = — a2> -7— = a2> —~ = «u ™ care re-
cx cy ox 8y zul tă condiţiile (2.32).
Suficienţa. Dacă u şi v sînt R-diferenţiabile în z0 e 6? şi derivatele lor 3u parţiale de ordinul întîi satisfac relaţiile (2.32), atunci există (z0), dx
(2o); (^O)J (zo) Şi funcţiile u±, u2 , v15 v2 cu limitele zero în z — z0 dy dx dy
astfel încît pentru orice z e G\{z0} a v e m
u(z) = u(«0) +—— {z0){x- x0) + ^ — («„) (y dx cy
y0) + ux(x, y)\z — z0
x (z) = v(a0) + — - (*0) (a? - a>0) + — - (*0) (y - y0) + Vi(a>, y) | 2 - z0\. cx cy
înmul ţ ind relaţia a doua cu i, ţ inînd cont de relaţiile (2.32), obţinem
2.35. î(z) = î(z0) + du
cx (»o)
.âv. . dx
{z—z0)-[ut(x, y)+i\t{x, y)1\ z~z0
z —z„ • (z — z0), unde uv va sînt continue în 20 şi u^z^ = v ^ ) = 0. Prin urmare
funcţia î± definită prin î^z) = — — \z — z01 ( |« — z01/(« — sc) este
28

un n u m ă r complex de modul 1 deci ^ 0) are proprietăţile că îx are l im[ f 1 | ( z ) = 0. » - > • * •
* 1 - " -înlocuind x — x0 şi y — y0 cu —[(z — 20) + (a — «„)] respectiv
2 — [(0 — z0) — (i — i0)] în formula (2.35) urmează 2i
2.36. f(«) = f(20) H • («0)(« — »o) + fiO8)^ ~~ zo) C11 î continaă în 20 ' ' ' " 8x
şi f , ^ ) = 0. Deci f este diferenţiabilă în z0 e G şi prin propoziţia (2.30) f este derivabilă în z0 şi i'{zQ) = • (z0). D
8x 2.37. Observaţie. Exis tenţa derivatelor parţiale de ordinul întîi
pent ru funcţia f în punctul z0 este implicată de diferenţiabilitaîea funcţiilor u = Ref şi v = I m f în z0e G. Egalităţile (2.32) se numesc relaţiile Caucliy-Riemann.
2.38. Observaţie. Din relaţiile Cauchy-Biemann obţinem pentru funcţia f derivabilă în z0 e G, următoarele expresii pentru î'{z0), formal diferite :
n ™ -. »„ 4 3u . . , . 8v , , du , . . du , , ev 2,38.1. f'(*„) = — (z0) + i — ^ (*„) = — - (*0) - i — («„) = — (20) +
<;a; 3a; ax oy cy . . 8v , . ST . . du . . di . . . di
+ i —~ (»o) = - r - ' ~o) - i -r-- (*o) = - r - K ) = - i — (0o)-da; % ety ^ c^/ Pen t ru modulul derivatei avem următoarele cinci expresii :
dr\2 __ (3u\2 fcuV _ (cv_\2 ^ / , 3#/ Vca;/ \dy) \8y) \8y j -•-•••: -[fy+f^'-f^v+^v^f-v+f^v
<?T~V , / <?T V _ cu ev <3u dv . , » toa te derivatele şi derivatele parţi-
cy) \ cx J cx cy cy cx ale fiind considerate în punctul z0£ G. Ult ima expresie a ra tă că |f'(*„)l2
este jacobianul funcţiilor u şi v în raport cu x şi y în z0. ci 1 l di ci
2.40. Observaţie. Dacă notăm —(z0) = — —(z0) — i —(zg) 8z 2 \8x cy ' ,
— (so) = — I—(#o) + i — ( 0 o ) | ) s e vede imediat că relaţiile Cauchy-iz 2 \cx cy J
Eiemann sînt echivalente cu relaţia -^ (z0) = 0. î n adevăr, această ega-8z
l i tate este echivalentă cu — (z0) + i — (z0) -+- i 8x 8x
— («o) + ! — (*«) = ° Şi ty cy J egalînd părţ i le reale şi imaginare cu zero obţinem echivalenţa cu relaţiile
Cauchy-Biemann. î n acest caz avem i'(z0) — — (zo)-8z
2.41. Observaţie. Se vede imediat că f = u — iv este derivabilă în z0 e G dacă şi numai dacă funcţiile reale u şi v definite pe mulţimea des-
ci chisă 6r<=C sînt diferenţiabile în z0 şi satisfac condiţia - r (z0) = 0. cz
29

2.42. Observaţie. Rezultă, ca şi în cazul real, că : 1) orice funcţie f : G -> C derivabilă în z0^G este continuă în z0.
2) Dacă f, g sînt funcţii complexe pe G şi derivabile în z0 e G, atunci f + g si fg sînt de asemenea derivabile în z0 si au loc relaţiile (f + g)' («0) =
== f'(0o) + g'(»0), tfg)'(*o) = f'(^o) g(*o) + W ) g'(*o)-3) Dacă f şi g sînt derivabile în z0e G şi g(#0) 96 0, atunci f/g este
derivabilă în z0 şi avem (f/g)' (»0) = [f'(«0) g(z0) - f(»0) g'(»0)]/g2(^0)- în adevăr, diferenţiabilitatea lui g în £0 asigură continuitatea lui \g\ în 20 şi existenţa unui disc U(z0 ; r) astfel încît | g(.«) | > | g(#0) j — s > 0 pentru orice z e Z7(«0 ; r).
4) Dacă (?j şi G2 sînt submulţimi deschise din C si fx: ^ -> 6r2, f2 : 6r2 -> C două funcţii complexe, z0 un punct din G1 şi z± = fx(z0) un punct din G, şi dacă fx, f2 sîwi derivabile în z0 respectiv z1, atunci f2 ° fx esie den-vabilă în z0 şi avem
2.43 (f2 o f ,) '^) = f2(%) î[(z0) = (fj o fl} (*0) f^ 0 ) . Funcţiile fx şi f3 fiind derivabile în z0 şi zx respectiv din propoziţia (2.30)
urinează că sînt diferenţiabile în z0 şi zx şi deci există două funcţii gx :G1-*~G2, g2 : G, -> C continue în z0 respectiv % cu g1(«'0) = 0 şi g2(%) = 0, astfel încît
pentru orice z e Gx =*> 4(0) = f^^) + fi(z0) (- - %) + gi(«) (* - »0)> pentru orice ze G2=> î2(z) = f2(%) + f2(%) (0 — zx) + g2(z) (z — zx).
De aici deducem pentru orice z^Gx, (î2°îi)(z) = fp[fi(^)] = (f?° fx) (20) + + f2(%) f{(*0)(* - «0) + {S(*L) gi(») + (g« ° fi) (*) [«(*„) + &(*)]} (* - *„)» unde expresia dintre acolade este continuă în z0 şi egală cu zero în z0. Deci f2 ° fj este derivabilă în z0 şi avem (f2of1)'{z0) = Î2{z1)î[(z0) = (t'2oî1)(z0)î[(z0). Q
5. Dacă G.2czG1 sînt două submulţimi ale lui C şi f este derivabilă în z0 e G2, atunci i\G2, restricţia funcţiei f la G2, este ăerivabilă în z0 si avem (i\G2y (z0) = r(z0).
Deoarece f j(?2 = f ° j , unde j este injecţia canonică a lui G2 în G şi Y(z0)=l, obţinem conform observaţiei (2.42.4) relaţia [î\G2)'(z0) = =î'(zomz0)=î'{zo).n
§ 6. FUNCJII OLOMORFE
2.44. Definiţii. O funcţie complexă f se numeşte olomorfă pe G dacă f este derivabilă în fiecare punct z0 din mulţimea deschisă G. Mulţimea tuturor funcţiilor olomorfe pe G se notează cu ff (G).
O funcţie complexă f se numeşte olomorfă pe o mulţime oarecare i c C dacă există o mulţime deschisă G care include A astfel încît f să fie olomorfă pe G.
O funcţie olomorfă pe C se numeşte funcţie întreagă. în baza acestor definiţii urmează că o funcţie complexă este olomorfă
în punctul zQ e G dacă există un disc U{z0; r) astfel încît f să fie olomorfă pe U(z0; r), deci f să fie derivabilă în fiecare punct z din U(z0; r). Dacă în plus î(zg) = 0, z0 se numeşte un zero al lui f (vezi (4.16)).
2.45. Definiţie. O funcţie reală u definită pe G din C se numeşte continuu difer enţiabilă de ordinul întîipe G dacă ea admite derivate parţiale
30

de ordinul întîi continue pe G. Clasa funcţiilor continue diferenţiabile de ordinul întîi pe G se notează cu CX(G).
O funcţie complexă u + i v se numeşte continuu diferenţiabilă pe G dacă u şi v sînt de clasa O1 pe G.
î n general este dificil să se verifice condiţiile de diferenţiabilitate într-un punct zQ £ G date în teorema (2.31). Luînd în locul lor condiţii mai restrictive, care să asigure diferenţiabilitatea, putem enunţa următoarea :
2.46. Propoziţie. Bacă « = R e f şi t ' = I m f sînt continuu diferenţiabile de ordinul întîi pe un discU(z0 ; r) eu rază oricît de mică (u, v€G1(U(z0; r))) şi derivatele parţiale ale lor satisfac relaţiile Cauchy-Riemann în punctul z0, atunci f este derivabilă în punctul z0. î n adevăr, continuitatea derivatelor pai'ţiale ale funcţiilor u şi v implică diferenţiabilitatea lor în z0 şi din teorema (2.31) urmează că f este derivabilă în punctul z0. Q
Pen t ru olomorfie pe o mul ţ ime deschisă G avem : 2.17. Propoziţie. Bacă « = R e f, » = I m f e C1(G) şi derivatele lor parţi
ale satisfac relaţiile Caucliy-Riemann pe G, atunci f este olomorfă pe G. Evident propoziţia este tot o consecinţă a teoremei (2.31).
Exemple. 1) Dacă u(x, y) = or,2 — y2, r(x, y) = 2xy atunci —— = 2x, cx
— — ~2y, — = 2y, — = 2x sînt continue pe C şi satisfac relaţiile lui Sy cx cy Cauchy-Riemann, deci or2 — y2 + 2ixy = (x + iy)2 este olomorfă pe C.
2) Relaţiile Cauchy-Riemann sînt condiţii necesare de derivabilitate pentru funcţia f car nu sînt suficiente. î n adevăr funcţia f definită prin
xii , . xy . . - " — î—; — daca z ^ 0,
0 dacă « — O
este continuă şi în z— 0, cum se vede uşor trecînd în coordonate polare x — r cosO, y = r sin 9, iar derivatele parţiale ale lui u s i v sînt nule în 2 = 0 , deci satisfac relaţiile Cauchv-Riemann. Dar, cum se verifică uşor, . .. . , . , ' , „ , , f (» ) - f (0 ) sin6 mnet ia nu este derivabilă m z = 0 pentru ca raportul =
0 — 0 1 - i t g G depinde de 8.
3) Condiţiile de diferenţiabilitate a funcţiilor reale u şi v sînt necesare pentru derivabilitatea funcţiei f dar nu sînt suficiente. î n adevăr, dacă l{z) = i = x — iy, — = 1 = aşa că relaţiile lui Cauchy-Riemann nu
cx cy sînt satisfăcute nicăieri şi deci f nu este olomorfă pe C deşi u şi v sînt R— diferenţiabile.
2.48. Propoziţie. Dacă D este un domeniu din C şi îejf(D), atunci derivata funcţiei i este nulă pe B dacă şi numai dacă f este constantă pe I).
Necesitatea. i'(z) = 0 pe D şi fie z0 un punct oarecare din B, adică £'(^o) = 0 î & fiind mul ţ ime deschisă urmează că există U(z0; r)czB. Pen t ru orice punct zx e U{z0; r) c D avem î'(z1) = 0. Din relaţiile (2.38.1)
urmează — (zj = 0, — {sij) = 0 şi —• (%) = 0, — (%) = 0. Prin urmare Sx cy ' cx cy
31

u(£0> y0)=u{x1, y0) = u(xx, yx) şi r{x0, y0)=y(xv ya)=v{xu xx) p e n t r u orice xx şi yx satisfăcînd inegalităţile | xx — x0\ < r[Ţ2, \yx — y0\ < r / ^ 2 . Deci f(%) = VL{XX, yx) + iv(xx, yx) = î(z0) pent ru orice zx G U(Z0 ; r) . Fie J.x == {zx G C ; î(zx) = î(z0)}. Din demonstraţia anterioară urmează că dacă z0 G J ^ atunci există Z7(20 ; r ) d 1 ; deci J.x este deschisă în B. Fie #M un şir din Ax convergent la ze B.Deoarece f este continuă pe i> urmează aăiî(z0)=l(zn)=î(z), adică z e Aj , prin u rmare Ax este şi închisă în B ca spaţiu. Cum Ax =£ O, Aa este deschisă şi închisă în B şi B este conexă, urmează că Ax = D. Deci î(z) = t(z0) pentru orice z£ B. Suficienţa este e v i d e n t ă . •
2.49. Propoziţie. O funcţie complexă f e 3^{B), unde B este un domeniu din C, este constantă dacă si numai dacă cel puţin una din funcţiile Ref, Imf, |f |, arg f este constantă pe B.
Fiecare din aceste condiţii este necesară pentru ca f să fie constantă, deoarece dacă f este constantă pe B, atunci Re f, Iinf, |f|, arg f sînt constante .
Condiţiile sînt suficiente. Dacă u(x, y) = Ref(z) = c pent ru orice z „ • du, , du , . „ . „ , , , du , , . du, . _ ,
dm B, atunci — {z) = — {z) = 0 şi î'(z) = — (z) — i — (z) = 0 pentru orice cx 8y dx dy
z e B. Din propoziţia (2.48) rezultă că f este constantă pe B. Dacă x(x, y) = c pe B, atunci — (z) = — (sr) = 0 si f'(») = — (2) + i —- (») = 0
3» d# dy dx şi aplicînd din nou propoziţia (2.48), f este constantă pe B.
Dacă|f(s) \2=u2(x, y)+v2{x, y) este constant pe B, atunci derivînd în raport eu xşiy avem 2 u — (sr) + 2v — (0) = 0, 2u — (z) + 2v - Z (*) = 0.
cx dx dy dy Folosind convenabil condiţiile Cauchy-Biemann, obţinem un sistem
liniar şi omogen
du. ~'^dv u — (0) + v — (z) = 0, cx cx
v — (z) — u — (0) = 0. cx 8x
Dacă u2 — v 2 = 0. atunci u = v = 0 şi f = 0 este constantă pe B. Dacă
u2 — v 2 > 0 , atunci sistemul admite soluţia banală (z) = (0) = 0 cx dx
du d~v pentru orice z din B, adică f'(?) = (z) + i (0) = 0 în orice z din B. dx dx
Conform rezultatului (2.48) urmează că f este constantă pe B. Dacă arg f = arc t g — — \ , atunci — — Ti. Dacă u = 0 pe B, atunci
u " u u = Re f este constant în B si, din prima par te a acestei propoziţ i i , f este constantă pe B. Dacă u ¥= 0, atunci v — Jcu = 0 şi funcţia ( — Te — i) f are par tea reală egală cu zero pe B, deci (—Jc — i) f este cons tan tă şi, prin urmare, f este constantă pe B. O
2.50. Consecinţe. Orice funcţie olomorfă pe un domeniu nu poate avea partea reală constantă şi par tea imaginară a funcţiei ne constantă
32
pe domeniu şi nici invers. Ca un caz part icular al acestei consecinţe avem că orice funcţie olomorfă pe un domeniu nu poate fi pur reală sau pur imaginară decît cÎTid funcţia degenerează într-o constantă. î n adevăr, dacă v = 0 pe domeniu D, urmează c ă u este de asemenea constantă în domeniu. La fel, dacă u = 0, atunci v este constantă pe B,
§ 7. EXEMPLE DE FUNCŢII OLOMORFE PE C (FUNCŢII ÎNTREG!)
2.51. î n acest paragraf vor fi introduse acele funcţii elementare care sînt oloniorfe în întreg planul complex, adică funcţia polinomială, funcţia exponenţială, funcţiile trigonometrice (sin şi cos) şi funcţiile trigonometrice hiperbolice (sh si eh). Terificarea că aceste funcţii sînt oloniorfe pe C se va face cu ajutorul propoziţiei (2.47).
2.52. Funcţia polinomială este o funcţie p : C —> C definită prin p(~) = c0 + (\~ -r <V2 + • • • + fV-"' unde c} e C, j e 0, n. Dacă c„, =£ 0, atunci poiinomul p este de grad n. O constantă diferită de zero este polinom de grad 0. Constanta 0, considerată ca funcţie polinomială, din motive formale, este privi tă ca polinom de grad — co. Aplicîud observaţia (2.42.2) produsului z.z...z, rezultă că (zn)' = nzn~1. O funcţie polinomială fiind o sumă de funcţii derivabile pe C, va aparţ ine clasei i f (C).
2.53. Funcţia : ^ e r (cos y -4- i sin y), uncie z = % + iy, aparţine clasei de funcţii ff({]). şi are proprietăţile principale ale funcţiei reale x >-> e''.
Cum e-'eos// şi <f sin y sînt continuu diferentlabile de ordinul întîi pe C şi verifică relaţiile Cauchy-Eiemaun, conform propoziţiei (2.47), rezultă că această funcţie aparţ ine lui jf{C). î n cazul y = 0 funcţia noastră se reduce la funcţia exponenţială reală cT. î n punctul 0 — 0 valoarea funcţiei considerate este 1. Aplicînd formulele (2.38.1) obţinem f'(-) = efc cos y + + ie'- sin y — î(z).
e"1+H(c-o&(y1 + yz) -4- i s i n ^ + yz)) = e%(cos y1 + i sin ţh) e^cos y, -f i sin //,)
rezultă din teorema adunării (1.20) pentru funcţia Gi->cos0 — i sin G şi teorema adunării pent ru funcţia exponenţială reală x H> eT. Evident această funcţie, no ta tă z i-> cz sau z i-> exp z, este o prelungire unică olomorfă (cf. 1.20) a funcţiei ez la to t planul complex C. Deci
2.54. ez = e" (cos y —• i sin y), (ez)(n) == ez, pent ru n e X*, e° = 1, eZl+z° = e2le-'2.
Din (2.54) luînd :>• = 0 si înlocuind y cu x, obţinem formula lui Euler 2.55. eix = cos ,r — i sin x şi 2.56. Re(e2) = e,r cos y, Im(ez) = e,T sin y, \cz = e:r. e3 = e-, arg e2 =
== #(mod 2-) , es # 0 pentru că ; e \ = e ' ; > 0 . 2.57. es+2~' = e s <
pentru că e2*1 = 1. (2.57) exprimă că funcţia exponenţială este periodică de perioada 2r i . Această proprietate spune că planul complex C se împarte într-o infinitate numărabilă de benzi Bk = {z ; m e R, 2k~ < y < 2(?C-4-1)TC} paralele cu Ox şi pent ru orice x0 e R fiecare z!: = cc0 -4- i(7/0 -j- 27,--) e JS* aşa ca e'fc — e^+ii/3. unde 0 < #0 < 2 - .
3 - c . 603 S0 33

Din formula (2.55) şi reprezentarea trigonometrică a numerelor complexe din (1.29) obţmem reprezentarea exponenţială a unui număr complex z :
2.58. » = re ie, unde r—\z\ şi 6 e Arg».
Din formula lui Euler, scrisă pentru a; şi — x, prin adunare şi scădere, obţinem reprezentarea prin funcţiile exponenţiale elx şi e~ix, a funcţiilor trigonometrice cosinus şi sinus, prin
2.59. cos x = — (eix + e-î2:), sin x = — (eix — e~lx). 2 2i
2.60. Definiţii. Funcţiile trigonometrice cosinus şi sinus de variabila complexă » se definesc prin relaţiile :
2.61. cos» = — (ei2 + e~iz), sin» = — (eiz — e~iz), 2 2i
care se obţin din (2.59) înlocuind x cu z. Se verifică uşor că aceste funcţii sînt întregi şi (cos z)' = — sin »,
(şin.0)' = cos z. De asemenea ele sînt periodice cu singurele perioade 2kn. Se obţine ş i :
2.62. cos ix = eh x şi sin ix — i sh x, unde eh şi sh reprezintă cosinusul şi sinusul hiperbolic şi
2.63. eiz = cos z + i sin». Din teorema de adunare avem: e
i(zi+Zs) = eizieiZ2, e~i(zi+Z2) = e~isie-iZ2, şi aplicînd definiţia funcţiei exponenţiale şi adunînd şi scăzind, obţmem formulele
cos(% + »2) = cos.% cos »2 — sin z1 sin z2, sin(»j -f- z.2) = sin % cos z2 + sin »2 cos %.
Scriind cos 2 = cos(a; -j- iz/) şi sin z — sin (a? + iy) şi aplicînd aceste formule de adunare, avem :
cos z = cos a? eh y — i sin a? eh y, sin # = sin x eh ^ + » cos a? sh ^ şi jcos»j2 = —[eh2y + cos2x], |s in»|2 =—[ch2y — cos2&],
Aceste ultime formule arată că Jcos»:2 şi !sin»j2 sînt aproximativ egale cu — e2v] pentru y suficient de mare. Deci cos» şi sin» pentru y -*• oo
nu sînt mărginite. Aceasta este o deosebire esenţială între funcţiile trigonometrice reale cosinus şi sinus, care sînt mărginite, şi funcţiile trigonometrice complexe definite în (2.61).
2.64. Definiţii. Funcţiile trigonometrice hiperbolice eh şi sh se defi-1 1
nesc prin relaţiile eh » = — (ez + e~z) şi sh » = — (ez — e_z), obţinute mlo-euind x cu » în definiţia funcţiilor trigonometrice hiperbolice reale.
Ele aparţin clasei de funcţii ^f(C), sînt periodice de perioadă 27ti; această proprietate şi (2.57), arată că sh, eh şi exp definite pe € se deosebesc de cele reale prin faptul că sînt periodice de perioadă 2^i.
34

Se demonstrează uşor teorema de adunare, eh2;? — sh20 = 1 etc. 2.65, Observaţii. Funcţia exponenţială nu are zerouri în C pentru
că e2 0 pentru orice z e C (formulele 2.56). Polinoamele au un număr finit de zerouri în C. Funcţiile trigonometrice (sin, cos) şi trigonometrice hiperbolice (sh, cli) au o infinitate numărabilă de zerouri. Mulţimile zerourilor sînt respectiv
{kn ; Ic e Z},
Hk -fr —) r.;kez\ şi {hni; fceZ}, Uk +—1 ni; he z i
pentru funcţiile scrise în paranteze şi definite în (2.61) şi (2.64).
§8. FUNCŢII OMOGRAFICE
UZ -ir b 2.66. Funcţia w = —> aă — bc^O, a, b, c, d<=C cu w(oo) — a/e
cz + ă pentru c ^ 0. w(oo) = oa pentru c = 0 şi w(— d/c) — oo clacă c =£ 0, definită pe COT cu valori în Cro, se numeşte funcţie omografică. Se vede că orice funcţie omografică are coeficienţii a, b, c, ă definiţi pînă la un factor constant complex diferit ele zero. Funcţia omografică este olomorfa în € \ { — di o} sau în C dacă c = 0. Punctul —d/c, în primul caz, şi oo în cel de-al doilea, se numesc poli simpli pentru funcţia omografică. Deci o funcţie omografică are un pol simplu : —d/c dacă c # 0 sau oo dacă c = 0.
Funcţiile omografice T : z H> w cu w definit în (2.68) cu matricele de tip (2,2) f ] se mai numesc transformări liniare, liniar fracţionare,
\cd) circulare, biliniare sau transformări Mobius (Moebius). Se vede că mulţimea acestor transformări este grup faţă de operaţia de compunere a funcţiilor şi că fiecare transformare omografică este un omeomorfism de ia COT pe Coo. Deci transformările omografice formează un grup de auto-morfisme a lui €«, sau a sferei lui Eiemann S2.
Cînd c ? ^ 0 transformarea omografică se scrie în forma a (bc — aă) 2.61 c ' c\z + ă\c)
de unde rezultă că transformarea (2.66) este compusă din transformările .. . , , d 1 / , bc — aă \ omografice particulare zx = z -\ , 0, = — , z3 = Tcz2 h — î»
o - " z1 \ c2 j a
"w = 3 H—-• Deci orice transformare omografică este compusă din trans-c ,' laţii z' = z + «., omotetii de raport h ^ 0 j compunerea unei rotaţii şi a
unei dilataţii z' = \lc\ z) si simetrii-inversiuni de forma z'=llz (com-|ft| j '
punerea unei simetrii faţă de Ox şi a unei inversiuni de pol 0 şi de putere 1). TT, " -, • a , b a l , b \ . . Daca c = 0. atunci w = —z -\ = — b i si transformarea
ă d d \ a) omografică este comupusă dintr-o translaţie si o omotetie.
30 35
2.68. Propoziţie. Transformările omografice duc cercuri în sens larg pe cercuri în sens larg (prin care în sens larg se înţelege un cerc sau o dreaptă, considerată ca un cerc ce^trece prin punctul de la infinit). Cum ecuaţia unui cerc este Azz 4- Bz 4- Bz + G = 0 eu A, C e 11 şi B e C şi inversa transformării (2.66) este z = (dw — &)/( — cw 4- a) se obţine o ecuaţie de aceeaşi formă în w şi w eu coeficienţi Alf B1} (\ cu J^ , C\ e R şi B2 e C. •
2.69. Bacă I este o transformare omografică, atunci (T%, Tc2, T«s, "l * 2 . ^3 *2 T*,) = (%, 2r4), unde (%, »2, s3, 04) este biraportul 1) ~ 2 ! ~3)
celor pa t ru puncte zx, z2, #3, »4 E C şi cel mult unul egal cu oo, adică biraportul este invariant la transformările omografice. Verificarea se face imediat observînd că Tz1 — Tz2 = (cal — bc)(z1 — z2)j(cz1 + d)(czz -f cZ). •
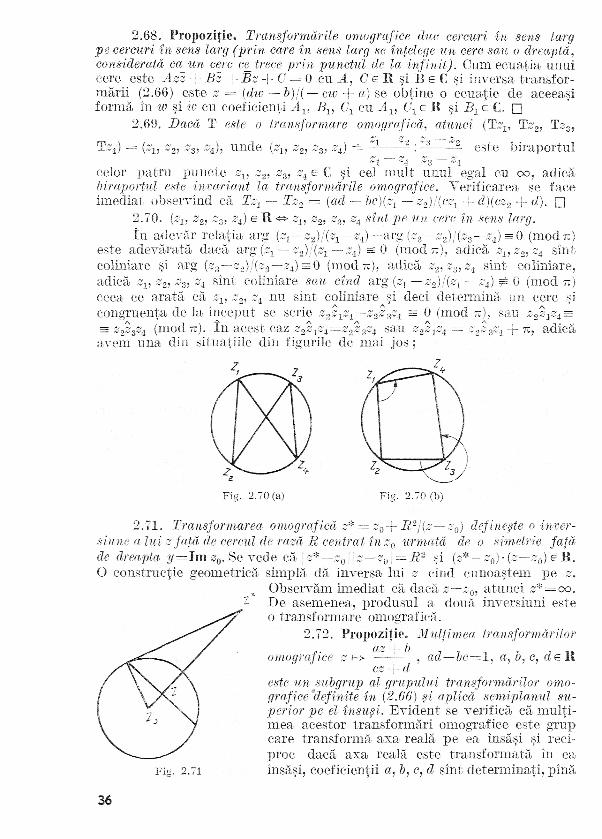
2.70. k"l ! ^2> e R In adevăr relaţia arg
,, zs, 04 sînt pe un cerc în sens larg. /(%—04)—arg (23—z2)/(zs—24) = 0 (mod- )
este adevărată dacă arg (% — ~2) /(z1 — ~4) s 0 ( m o d - ) , adică z1,z2,zi sînt coliniare şi arg (z3—z.2)j(z3 — ~4) s 0 ( m o d - ) , adică ,r2, s3, ,?4 sînt coliniare, adică %, «2, %, »4 sînt coliniare sau cînd arg (z1 — z2) . (^ — ;•,) # 0 (mod TT) ceea ce arată că ~1; zz, :4 nu sint coliniare şi deci determină un cerc şi
A congruenţa de la început se scrie -z2zizi = 0 (mod %), sau = *2«3*4 (mod - ) . I n acest caz z2zxZi- '- 9 Z c sau avem una din situaţiile din figurile de mai ios ;
- 2 * 1 - 1 -2*3*4 -T 7t, adică
rig. 2.70 (a) Fig. 2.70 (b)
2.71. Transformarea omografică z* = z<)^-M2/(z—z0) defineşte o inversiune a lui z faţă de cercul de rază Ii'centrai'în z0 urmată de o simetrie faţă de dreapta y = I m % Se vede că : z*—z0 z—zg = I?2 şi (z*— zQ)-(z—z0) e B . O construcţie geometrică simplă dă inversa lui z cînd cunoaştem pe z.
, Observăm imediat că dacă z=z0, atunci z*=oo. 2 De asemenea, produsul a două inversiuni e^te
o transformare omografică. 2.72. Propoziţie. Mulţimea transformărilor
az 4- & omografice z aă- -1, a, b, c, deR
Fis. 2.71
cs 4-<Z este MM subgrup al grupului transformărilor omografice definite în (2.66) si aplică semiplanul superior pe el însuşi. Evident se verifică că mulţimea acestor transformări omografice este grup care transformă axa reală pe ea însăşi şi reciproc dacă axa reală este transformată în ea însăşi, coeficienţii a, b, c, d sînt determinaţi , pînă
36

la un factor, de un sistem de ecuaţii liniare cu coeficienţi reali, care se obţine scriind că punctele corespunzătoare prin transformarea omografieă sînt reale pentru trei puncte distincte %, z2, zs de pe axa reală.
Se vede uşor că transformările considerate în această propoziţie transformă semiplanul superior y > 0 pe el însuşi. Es t e suficient pent ru aceasta
r „ „ ax -f- b « c + bd . ad— bc sa verificam ca punctul z=\ se transforma in '— = \-i *
ci + d c2 + d2 c2 + d2
, a\-\-b ad—bc unde Ini — = > 0. •
ei -*- d e2 + d2
2.73. Propoziţie. Mulţimea transformărilor omografice care transformă discul unitate pe el însuşi este un subgrup al grupului transformărilor omografice şi ele au forma:
2.74 w = ei,J — ~°- , 6 e R, | z0\< 1. l~z0z
Transformările omografice din propoziţie t rebuie să ^transforme cercul zz = 1 în cercul ww = 1 şi discul zz < 1 în discul ww < 1. Pr ima din aceste condiţii exprimă că avem {az — b) (ăz + b) = (os + ă) (cz + d) oricare ar fi z de modul 1. ceea ce implică :
2.75. aă — ce = bb — dă şi ab = al. • , - '(dd-bb)(l-zz) - .
Avem atunci 1 — ww = si 1 — zz > 0 implica \ez + d\2
1 — ww > 0, dacă şi numai dacă 2.76. dd — bb> 0.
Inegalitatea (2.76) si prima relaţie din (2.75) implică d =£ 0. a # 0. Din c b -
egalitatea a dona din (2.75) avem — = — = /.. Din această egalitate si a ă
(2.76) urmează /. < 1. Tot din această inegalitate şi prima din (2.75) urmează \a\ = \d\. Deci
' 0 I
cz + d d , _ y «
deoarece ;«; = !« antrenează a-jd = em şi »0 = — X «,«• implică = X| | d / a | = JX|<1 şi S0 = —\dJa= —'/. ei0 = —J.ajd. Q
2.77. Clasificarea transformărilor omografice după punctele lor fixe a * 3, adică punctele care satisfac relaţia (as + &)/(<?2 + ă") = s sau ec2 -r (d — a) z — b = 0. Punînd în evidenţă punctele fixe a şi 3 (a =£ 3) transformarea omografieă se scrie
W — y " — n 2.78. — - - = Ic
XB — R
unde fc se determină scriind că punctului ~ = —djc îi corespunde w = oo, deci Jc = (e3 + d)l(cct 4- d). După valorile lui A-, transformarea omografieă cu puncte fixe distincte se numeş te : hiperbolică cînd A e R , eliptică, cînd ft F C şi j &i = 1, Zo vodromică cind A e C şi | A | 56 1.
37

2.79. Dacă a = p (puncte fixe confundate) transformarea oniografică se numeşte parabolică. In acest caz = k se scrie 1 + - =
w — p 0 — p w— (3 ,. , J - s 1 & , h— 1 . ,. , ,. c&+d _
= & + k, sau = • -\ si avem Îmi h = lim J~i— = 1 z — p w — (3 s— p Şi—a.' (3-a B->«ca+d
w— p z — p ' cp + d 1
ca + ^
'p-
c
— şi av — a
2c şi lim = lim ' = —-— = — • Deci transformările omo-P-*a P — a P-*a p — a ca-f-d! a -p d
grafice parabolice sînt de forma = \- c', unde c' = 2c[(a + d). w— a 2 — a
2.80. în cazurile transformărilor omografice hiperbolice şi loxodro-mice, dacă \Jc\ < 1 avem
- = &*- atunci Tnz, iterata n—a a lui z, pentru z^Q, Tnz - p z - p
tinde uniform la a cînd » -> oo ; a se numeşte punctul fix atractiv şi p punctul fix repulsiv al transformării omografice. Dacă | f t | > l şi s # a , valorile punctelor a şi p se schimbă între ele. în cazul transformărilor omografice eliptice punctele fixe a şi p se numesc indiferente.
§9. FUNCŢII RAJIONALE
2.81. O funcţie raţională B : C->C este definită ca un cît de două polinoame p şi q care nu au factori comuni (deci fără zerouri comune). Evident B este o funcţie olomorfă pe C\{61? b2, . . ., bm] unde bl:, li e 1, ?n, sînt zerourile din C ale polinomului q de la numitor, numite poli pentru funcţia raţională. Derivata este dată de (2.42) pentru orice z e C cu q(s-) # 0. Dacă luăm B(5;.) = oo, atunci B : C -> CM. O unitate mai mare se obţine dacă permitem variabilei z să parcurgă €«,, adică prelungind prin continuitate funcţia E in punctul oo luînd B(co) = lim ~&{z). Această prelungire nu determină ordinul de multiplicitate al zeroului sau ordinul polului oo. Luînd B(lte) = T&iiz) atunci B(oo) = B^O) şi dacă B fO) = 0 sau oo, atunci ordinul de multiplicitate al zeroului sau ordinul polului funcţiei raţionale în oo este ordinul de multiplicitate al zeroului sau ordinul polului funcţiei raţionale B, în 0.
an -4- av? .-,n-l _L Bte) = ° ' =£ • — ' '" => Fu(2) = g » - "°* ^ * ' ' ' ' J - J cu
30 + fca + • • • + P.^'n " Po*" + Pi^""1 + • • Km
«0 5* 0, p0 ¥= 0.
2.82. Propoziţie. Pentru, orice funcţie raţională numărul zerourilor este egal cu numărul polilor, fiecare zero sau pol fiind considerat ca zero sau pol simplu de atîtea ori cît indică ordinul de multiplicitate al zeroului sau respectiv ordinul polului. Numărul comun al zerourilor şi polilor din €«, se numeşte ordinul funcţiei raţionale. Ecuaţia R(z) — a. (a constantă complexă) are numărul rădăcinilor egal cu ordinul funcţiei raţionale E.
33

ISTumărul zerourilor şi polilor din C^ în următorul tablou :
ai funcţiei raţionale sînt daţi
Cazuri
m > n m = n m < n
Numărul zerourilor
în C
n n n
Ordinul zeroului
co
m — n --
Numărul zerourilor în
^co
m n n
Numărul polilor în
C
m m m
Ordinul polului
CQ
_ -
n — m
Numărul polilor în
Cco
m m n
B — 7. are acelaşi număr de poli ca funcţia B. • 2.83. Observaţii. Funcţiile raţionale au un număr finit de poli, ele
constituie un caz particular al funcţiilor meromorfe pe C, care au numai singularităţi polare (în care valoarea funcţiei este co). Exemple de funcţii meromorfe pe C care au o infinitate de poli simpli sînt date de funcţiile trigonometrice (cotg, tg şi funcţiile trigonometrice hiperbolice (ctgh, tgh) care au ca poli, zerourile indicate la funcţiile date în (2.65). Evident toate funcţiile indicate aici sînt derivabile în toate celelalte puncte diferite de poli. (Yezi şi (4.49), (4.54).)
Se ştie că orice funcţie raţională se poate reprezenta ca o sumă a unui polinom şi o sumă finită de funcţii raţionale simple, fiecare cu un singur pol.
2.84. O funcţie raţională de ordinul doi cu poli simpli, printr-o transformare omografică care duce polii în 0 şi co, ia forma z — w' = Az'-\r
C\z' sau w' - B = ][A~G{s']fJl][C + lţz'YĂjG). Notînd V " " ^B 2][ĂC
07:
w şi z'yAjC cu z, adică aplicînd pentru w' şi z' transformările omografice definite de notaţii, avem forma normală a funcţiei w în acest caz, definită de relaţia w = — I z H I» care reprezintă transformarea lui JukowsM. iK)-
§ 10. APLICAŢII MULTIVOCE
2.85. Definiţie. Mulţimea tuturor w cu ew = z pentru orice seC* defineşte o aplicaţie multivocă (multifuncţie) Log : C* -> &>(C) numită aplicaţia logaritmică. Dacă w = u + iv şi z =Vei9, r # 0, atunci eu+iv = rei6, de unde rezultă că u = Inr şi v = 6 +2Jcn, keZ, adică Log» = {lnr + + i( 6 + 2S-); h e Z}. Deci, pentru orice z e C*, putem scrie Log z = In | z | + + iArg2. FieD = C\{»e € ; Re2<0, Imx = 0}. Pentru ze D şi keZ, vom
iar funcţia a aplicaţiei
multivoce Log. Funcţia log0 se notează log şi se numeşte ramura principală a aplicaţiei Log.
a=rei6, 0e] — n, TI]
nota logfc» = ln\z\ + i(args + 2fc~), unde arg se ]— - , - ] , logft : D -> C se va numi ramură (sau determinare) uniformă
Fie a şi a două numere complexe, cu a # 0. Funînd «i + ia2, definim aa prin a<* = eaLoga = {z 6 C e
«ilnr—a2(9+2A7t) Şl O.
ei[a2lnr+C(î(e+2^, Jt e Z}. Aplicaţia F : C* -> 0>(C), definită prin F(z) = »K, ze. C*, este o aplicaţie multivocă, ea exprimîndu-se prin aplicaţia mul-
39

tivocă Log. Pentru fiecare k e Z se poate defini în domeniul D, considerat mai sus, o ramură uniformă îk = ealogs. Dacă a = - - (ne N*), se poate
n arăta uşor că aplicaţia multivocă F are în I) n determinări distincţi».
Mulţimea numerelor complexe w eu cos w = z defineşte o aplicaţie multivocă Arc cos : C -* &>(£,). Se verifică uşor că Are cos z = ± iLog(z -j-+ ]f(z- — 1) şi că fiecare determinare este uniformă pe domeniul €\{.ce € ; I lîe z i Js 1, Im z = 0}. La fel avem Are tg z = Log " — - - TJnifor-
2 " z + i mizarea determinărilor se face pe domeniul C \{z e C ; ] Imz \>1, Me;: = 0}.
2.86. Pentru a verifica mai simplu olomorfia determinărilor principale ale acestor funcţii, avem nevoie de condiţiile Cauchy-Riemann în coordonate polare. Dacă w = f(~) = f(rei0) = s(r, 8) -f it(r, 6), atunci
dacă 6 este constant,
dacă r este constant.
Trecînd la limită (Ar-^ 0 sau A 6 -> 0) obţinem î'(z) = e (s'r + it'r) = e-ifl
= (SQ -f- it'd), ceea ce conduce la relaţiile Cauchy-Biemann in coordo-ir
1 1 nate polare : s'r = —t6, t'r = s8. Pentru log z = log r -f io, 6 s j — - - , - j
r r avem s'r = l/r, t'e = 1, <' = 0, se = 0 şi satisface relaţiile Cauchy-Biemann. Din expresia lui i'{z) verificăm uşor că (laz)' = l/z. La fel se verifică olomorfia determinărilor pentru celelalte aplicaţii multivoce,
2.87. Definiţia funcţiilor elementare. Constantele, funcţia identitate 1(1(2) = z), funcţia exponenţială şi funcţia logaritmică se numesc funcţii elementare fundamentale. Orice funcţie care se obţine prin aplicaţia de un număr finit de ori a operaţiilor algebrice (adunare, înmulţire, împărţire cu funcţii neidentic nule şi extragerea rădăcinii) şi a operaţiei de compunere a funcţiilor elementare fundamentale se numeşte funcţie elementară. Se vede imediat că toate funcţiile studiate din punct de vedere al olo-morfiei sînt funcţii elementare.
§ 11. INTERPRETAREA GEOMETRICĂ A DERIVATE!
2.88. Fie un drum yE £"G(z0, z), unde z0 şi z aparţin unei mulţimi deschise 67 c: C. Dacă f este continuă în 67, atunci w = f o y defineşte un drum YJ în planul (w) care este imaginea drumului y în planul (w) si aparţine mulţimii £>(î(z0), î{z)). Drumul y se numeşte neted dacă ye C1([0, 1 j) şi y'(t)^Q, pentru orice te [0,1]. în acest caz există un vector tangent ia drumul y, in orice punct y(t), definit de y'(i). Dacă <p este unghiul pe care acest vector îl face cu sensul pozitiv al axei reale, atunci avem cp = argy'(f)
Af Az
ă(s + ii) A(rei6)
Ms + » ei0Ar
A(s + it) rA(e î0\
40
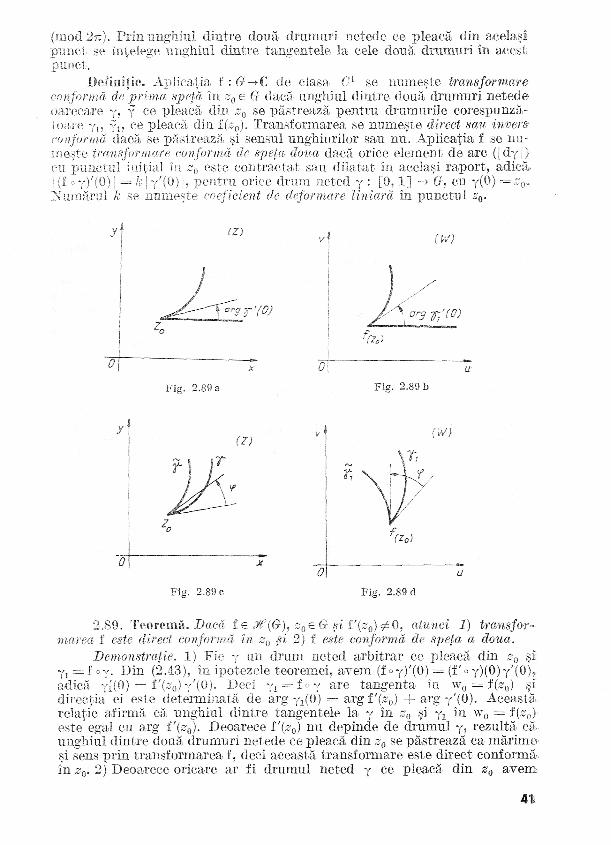
(mod27t). Prin unghiul dintre două drumuri netede ce pleacă din acelaşi punct se înţelege unghiul dintre tangentele la cele două drumuri în acest punct.
Definiţie. Aplicaţia f:6r-*C de clasa C1 se numeşte transformare conformă de prima speţă în z0 e G dacă unghiul dintre două drumuri netede oarecare y, y ce pleacă din ,~0 se păstrează pentru drumurile corespunzătoare y1; Yi> ce pleacă din î(z0). Transformarea se numeşte direct sau invers conformă dacă se păstrează şi sensul unghiurilor sau nu. Aplicaţia f se numeşte transformare conformă de speţa doua dacă orice element de arc (|dyj) cu punctul iniţial în z0 este contractat sau dilatat în acelaşi raport, adică i (f o y)'(0) | = k'\ y'(0) |, pentru orice drum neted y : [0. 1] -> G, cu y(0) = z0. Numărul k se numeşte coeficient de deformare liniară în punctul z0.
y IZ)
Fie. 2.89 a
(M
0\ ii
Fig. 2.89 b
(Z)
Fig. 2.89 c
(W)
(Zo)
Fig. 2.89 d
2.89. Teoremă. Bacă f e J^(G), z0eG şi f'(£0)^0, atunci 1) transformarea f este direct conformă în .c0 şi 2) i este conformă de speţa a doua.
Demonstraţie. 1) Fie y un drum neted arbitrar ce pleacă din z0 şi Yl = f oT. Din (2.43), în ipotezele teoremei, avem (f °y)'(0) = (f o y)(0)y'(0J, adică yi(O) = f(%)y'(0). Deci y i = f - y are tangenta în w0 = f(z0) şi direcţia ei este determinată de arg y^O) = arg f («„) + arg y'(0). Această relaţie afirmă că unghiul dintre tangentele la y în şi Yi în w0 = î(z0) este egal cu arg i'(z0). Deoarece f (z0) nu depinde de drumul y, rezultă că unghiul dintre două drumuri netede ce pleacă din z0 se păstrează ca mărime şi sens prin transformarea f, deci această transformare este direct conformă în z0. 2) Deoarece oricare ar fi drumul neted y ce pleacă din z0 avem.
4t:

| (f ° y)'(O) I — ! i'(z0) [ | y'(O) I, deducem că f este conformă de speţa a doua cu fc = |f '(*0) | . •
2.90. Observaţii. 1) Demonstraţ ia de mai sus pune în evidenţă faptul că dacă f este derivabilă în punctul z0 e G şi f'(z0) ^ 0, atunci arg i'(z0) reprezintă unghiul de rotaţie al tangentei la u n drum neted ce pleacă din z0 pr in transformarea f, iar |f'(«0)| reprezintă coeficientul de deformare liniară în acest punct .
2) Condiţia i'(z0) ¥= 0 în teorema (2.89) este esenţială. î n adevăr se poate ară ta uşor (considerînd, de exemplu, două raze ce pornesc din origine) că transformarea f : C -> C, definită prin i(z) = z2, dublează unghiurile în punctul z0 = 0, unde derivata lui f se anulează.
3) Es te clar că cele două conformităţi implică existenţa derivatei f în z0eG. Es te mai puţ in evident că numai una din cele două conformită ţ i implică existenţa derivatei f în z0, chiar impunînd condiţii noi de regularitate. Următorul rezultat, datorat lui Kasner (1928), permite să se dea un răspuns la această problemă.
2.91. Propoziţie. Bacă funcţia complexă f este de clasă C1 pe o mulţime deschisă G c C , z 0 e G şi notăm î'y(z0) = (f °y)'(0)/y'(0), unde y este un drum neted în G cu punctul iniţial z0, atunci fY(z0) descrie un cerc cînd y
variază. Acest cerc, numit cercul lui Kasner, are centrul în • (z0) şi raza dz
dt t ^ — (%) dz Punînd y(*) = «(*) + iPW» avem
d(foY) _ dt da , di ă$__ dy _ d a dŞ ăt dec ăt dy ăt ăt ăt
d3 /_dy_\ ăt ' [dt )
da . dS dt ăi
da d3 Eliminînd si —— > obţinem
ăt ' ăt
d(foy)
ăt dt
° i dx
(foy)'(f)
• _df \_dy 1 dy) ăt
di
1 f di di 2\dx l d
di
y ){ăt }• sau
. r'(t) + -^Y(t)-dz dz
Punînd t = 0 şi notînd <|< = arg y'(0) deducem
2.92. f;(0o) — («o) + — (»o) e 2"v, 02 03
sau
w 3f (*o) dz io)
ceea ce arată eăjE^o) descrie cercul lui Kasner. •
42

2.93. Propoziţie. 'Fie î o funcţie complexă de clasă C1 pe mulţimea deschisă G<=C 1) Bacă î este direct conformă în z0eG atunci ea este'derivabilă în z0. 2) Dacă î este conformă de speţa a doua în punctul z0 e Gr atunci î sau î este derivabilă în z0.
1) Pentru ca arg î'r(z0) = arg yi(0) — arg y'(0), yx = f o y, să fie inde-pendent dey, trebuie caf^O0) să fie constant. Din (2.92) deducem -^r{z0)=Q,
dz ceea ce implică derivabilitatea l u i / în z0. 2) \îy{z0)\ = I (f° Y)'(0)|/|y'(0)| este constant oricare ar fi drumul neted y din G, cu punctul iniţial z0, dacă sau raza cercului lui Kasner este zero şi în acest caz f este derivabilă în zM
sau centrul cercului lui Kasner este zero, adică —- (z0) = 0, ceea ce spune dz
că f este derivabilă în z0. • 2.94. Definiţie. Dacă î e #f{G) şi (î)'(z) =£ 0 în G atunci spunem că
f este antiolomorfă, anticonformă sau indirect conformă.
2.95. Transformarea z >-> vr = — j z -\ ]• Profilul aripei de avion.
folosi curbe de nivel. Punî:
u + iv = — I f H j cos 0 2 \ r )
• A 1 • 1 ( , 1 \ A 1 I 1 \
sm 8, deci u = — \r -\ cos 8, v = — r 2 l r } 2 V r)
Pentru a studia această transformare rom folosi curbe de nivel. Punînd 1 1
z = re , avem — = — e _ i 9 şi avem w z r
-ţ I r 1 .-.:: -. ._—. v — — . : \V •: ~ = — • ! »..:i
1) Dacă z descrie curba de nivel \z\ = r, punctul w descrie elipsa u2 v2 1 / 1 \ 1 / 1 \ . . . .
1 — i} a = — ir _] , 0 — — i j . oDtmuta prin eliminarea o2 &2 2. V. r I 2 V r / ' parametrului 0 din ecuaţiile precedente. Cum o = jAa2 —52 = 1, urinează că focarele sînt situate în punctele —1 şi 1, oricare ar fi r. Deci cercurile centrate în 0 sînt transformate într-o familie de elipse omofoeale. Pentru r = 1 elipsa se reduce la segmentul [—1. 1] parcurs de două ori în sensuri contrare.
2) Luînd curba de nivel 8 = const, eliminarea lui r, conduce la •,j2 ' y 2 .
= 1, c = Ya2 -f h2 = 1. Deci dreptele prin originea planului cos2 8 sin2 8 (.•?) se transformă într-o familie de hiperbole omofoeaie, cu focarele — l , ş i l .
-i
Funcţia z -j • fiind olomorfă în tot planul exceptînd polii (0 şi oo) trans-formarea păstrează unghiul a două curbe. Deoarece dreptele 6 = const şi cercurile \z\ = r sînt ortogonale, urmează că hiperbolele celei de-a doua, familii sînt ortogonale elipselor primei familii.
w-i (z-iy z-i , z2 + i 3) Cum — = - - - - - avem % = — — z2 = z\, w = — •
; w + 1 \z + l) z + 1 — z.2 + l în planul (z) fie un cerc yx care trece prin punctele — 1 şi 1 şi face unghiul <p cu axa ox iar y2 un cerc tangent ia y2 în punctul - f i , avînd raza mai mare decît a cercului yx. în planul zx omografia zx = (z — l)/(z + l) transformă cercul Yi hi dreapta yî prin 0 iar cercul y3 în yâ tangent în 0 la yj. Transformarea z2 = z\ dublează toate unghiurile prin origină şi transformă yî
43

în y" parcursă de două ori în sensuri contrare, cercul y2 este transformat în Y2' eu punct de întoarcere în 0. w = (~2 +1)/( — z2 + 1 ) , fiind o omografie, semidreaptă yî' se transformă în cercul yî" c e trece prin punctele — 1 şi
Fia- 2.35 a Fig. 2.95 b
yk (z, V
-1
TC*7~777^ 0M& i
\ \
CWj
\ 2 V
/
Fie;. 2.95 d
1 si face unghiul 2y cu axa reală a planului w. y2' este transformată în yâ" cu punct de întoarcere în + 1 , yi" s e numeşte scheletul profilului iar yâ" este profilul lui Jukowski aplicat la construcţia aripilor de avion.
2.96. Geometria lui Poincare este o realizare a unui model euclidian a geometriei lui Lobacevski. Grupul transformărilor omografice w = = (ac — b)j(cz + d) cu a. b, c, d, e R si aă—bc = 1 transformă semiplanul superior pe el însuşi. Aceste transformări duc semicercurile centrate in puncte de pe axa reală în semicercuri de acelaşi tip şi păstrează unghiurile
deoarece w = (as — o) (cz ~ a) este olomoria. Cum v = y si 1—i — e^«?: 2 ' \dz\
ad — bc adică d s j as unde sînt drumuri din (?) şi (w)
[C0-|~<2|2 V ?/ corespunzătoare prin transformarea omografică considerată, avînd elementele de arc ăs şi ăsx-ă.sjy este invariantul liniar al lui Poincare.
ds Dacă y3 este un drum din semiplanul superior, notăm cu
3 y lungimea
44

drumului y3. Grupul transformărilor omografice care transformă semi-planul superior pe el însuşi păstrează astfel lungimile şi unghiurile. Ca drepte neeuelidiene se consideră semicercurile centrate pe Ox din semiplanul superior. Se vede că dintr-un punct M exterior dreptei neeuelidiene (ă) se pot duce o infinitate de paralele (cercuri care nu întîlnesc (d)).
După cum se constată clin figură acest model are o dreaptă la infinit, se realizează pe un semiplan al planului complex şi nu are nimic comun cu planul complex extins care conţine întreg planul complex şi un singur punct la infinit. Grupul transformărilor omografice considerate reprezintă grupul mişcărilor (deplasărilor) în geometria lui Lobacevski.
(Z) (Z)
Fig. 2.96 a Fig. 2.96 b
După o analiză mai detaliată a acestui model, care nu constituie © preocupare a acestui manual, introducindu-se un invariant superficial la deplasări, tot al lui Poincare, se obţin două rezultate clasice : 1) aria unui triunghi este egală cu excesul lui - asupra sumei unghiurilor, 2) suma unghiurilor unui triunghi este mai mică decît n.
Evident pentru aceasta trebuie să se introducă conceptele destul de dificile de unghi. arie. cerc, rotaţie.
CAPITOLUL i i i
INTEGRAREA FUNCŢIILOR COMPLEXE
După studiul derivatei, trecem la introducerea integralei unei funcţii complexe de-a lungul unui drum. Proprietăţile simple ale integralei complexe seamănă cu cele ale integralei reale. Vom obţine de exemplu o teoremă de tipul formulei lui Newton-Leibniz. în continuare apar însă deosebiri substanţiale. Teorema lui Cauehy şi formulele lui Cauehy n-au echivalent în domeniul real şi atrag după sine un lanţ întreg de rezultate specifice funcţiilor complexe care arată o legătură mult mai profundă decît în cazul real între teoria derivatei şi cea a integralei. în primul rîncl condiţia de derivabilitate a unei funcţii pe un domeniu D simplu conex, se dovedeşte a fi echivalentă cu cea a existenţei unei primitive (în cazul axei reale, a doua condiţie e mult mai slabă). în al doilea rind vom demonstra, folosind teoremele privind integralele complexe, teoreme pur diferenţiale, cum ar fi cea care asigură că orice funcţie olomorfă, deci derivabilă pe o mulţime deschisă G e nelimitat derivabilă sau proprietatea că orice funcţie derivabilă şi mărginită pe C este constantă.
Tot în acest capitol vom arăta că părţile reală şi imaginară ale unei funcţii olomorfe sînt funcţii armonice.
în ultimul paragraf vom reformula noţiunea de integrală complexă încadrînd-o în teoria integrării formelor diferenţiale, limbaj deosebit de-util în studiul integralelor funcţiilor de mai multe variabile.
§1. INTEGRALA COMPLEXĂ
î n acest paragraf introductiv vom defini integrala complexă ca un caz particular al integralei Stieltjes-Eiemann, ceea ce ne permite să preluăm un mare număr de rezultate din analiza reală.
Integrala complexă seamănă cu integrala curbilinie; vom integra o funcţie continuă de-a lungul unui drum rectificabil oarecare.
3.1. Definiţie. Fie [a, b] un segment real iar f o aplicaţie a segmentului [a, b] în C şi A = {t0, tlf ..., tn) o diviziune a segmentului [a, &]. Vom nota li A |.| = max {tt — t^x: feeii, »}. Prin variaţia pe A a lui f, înţelegem
46

2. Dacă f = u + iv, atunci ' U{lk> " ^ \\ <\ î(h) - f (*M) | < ' ' - " -i)l J
suma : V(f,A) = £ | f ( « - 1 ( ^ ) 1
iar marginea superioară a acestor variaţii, cînd A parcurge mulţimea tuturor diviziunilor segmentului [a, b] se notează cu V(f, [a, b]) şi se numeşte variaţia totală a lui î pe [a, &]. Dacă variaţia totală e finită (adică mulţimea tuturor variaţiilor pe diferitele diviziuni e mărginită), atunci f e cu variaţie mărginită. Dacă y e un drum cu variaţie mărginită el se numeşte drum •reetificabil şi variaţia lui totală e lungimea drumului pe care o notăm cu V(y).
Un contur e un drum reetificabil închis.
3.2. Observaţii. 1. în cazul unui drum y (vezi figura 3.2) interpretarea geometrică a variaţiei pe A este lungimea pig. 3.2. unei linii poligonale cu vîrfurile în y(^).
|u(*»)-u(*M
Mtk) -v(t*_ < \u{tk) — u(<J._1)| + | v ( y — v(Vi)l deci f e eu variaţie mărginită exact
atunci cînd u şi v sînt cu variaţie mărginită. Această legătură dintre condiţia de mărginire a variaţiei la funcţii complexe şi la funcţii reale, permite transpunerea unor teoreme din analiza reală la funcţii complexe.
3. Dacă f, g : [a, 6] -> C sînt cu variaţie mărginită atunci f. g şi af -f- (3g sînt cu variaţie mărginită (a, pe C).
Fie a<c<b; î este cu variaţie mărginită pe [a, b] atunci şi numai atunci cînd f e cu variaţie mărginită pe [a, c] şi [c, &]. Proprietatea de a fi cu variaţie mărginită se transmite de la f la | f |.
4. Orice drum poligonal e reetificabil şi variaţia ei totală este lungimea drumului.
5. Orice drum y poate fi aproximat uniform cu drumuri poligonale. într-adevăr, asociem fiecărei diviziuni A = (t0, tv ... t„) a intervalului [0,1] un drum poligonal yA astfel încît pentru orice te ftţ_i>'*] definim
ti h-i h h-i
Evident avem yA(^) = y(tk) adică drumul poligonal yA are vîrfurile pe {y} şi pentru orice s > 0 există un v) > 0 pentru care ]|A|| < vj implică ITW ~ YAWI < s oricare ar fi i e [0,1]. într-adevăr y fiind uniform continuă pe [0,1] va exista T - > 0 astfel încît \t' — t"\ < r; să implice |y(f) — — Y(*")l < s- Eie A o diviziune cu ]|A|| < rt şi te [tt-1,t)e']). ISTotînd
a4 = — şi Pt = — vom avea aA + p s == 1 deci | y(f) — yA(î) j =
= !(«* + Pt) Y(*) - C«* Y(«*-x) + P* Y(fc)]| = = I «* M*) - Y(**-I)] + P* CY(0 - Y(**)] ! < «* s + p* s = E
47
6. Fie (y« ; n e N) un şir de drumuri din mulţimea deschisă G ce converge uniform către y, {y} <= G iar f o aplicaţie continuă din G în C. Atunci şirul f o yB de drumuri converge uniform către f ° y. într-adevăr fiind dat s > 0 alegem un v)>0 astfel încît V (y; rj = u {?7 (y(t); r ;): t_e [0,1]} să fie inclus în G. î fiind uniform continuă pe mulţimea compactă Z7(y, rt), va exista un T a > 0 mai mic decît r; şi pentru care |»'— z"\< rn implică \î{ts') —î(s")\ < e pentru orice z', z" e U (y; >j). Alegem un n0e J\T cu proprietatea că |y(£) — y0(i)| < ^ pentru orice ie [0,1] şi w> H0 şi atunci avem |f (y(i)) ~f(y»(i))! < e-
3.9. Integrala Stieltjes-Riemann a unei funcţii complexe de o variabilă reală. Considerăm mai intîi două aplicaţii u, U ale segmentului [a, &]c R în R şi notăm
aţu, 17, A) = y U(TJ..) . [U(ii-) — U(fjt_1)] unde A e o diviziune a seg-inentului [a, b] iar T,-. G [f,.„1. ?,..]. Dacă există un număr real 1 astfel ca pentru orice s > 0 să existe r, > 0 cu proprietatea că (|A|| < r, implică I — a (u, U, A) | < e, atunci spunem că ti este integrabilă în raport cu
U pe [a, b] (în sens Stieltjes-Riemann) şi notăm
b
u dU
Sint cunoscute din analiză proprietăţile acestei integrale — vezi de exemplu [21] voi. I I pag. 25—39).
Fie acum f — u + iv şi F = U + iY două funcţii definite pe [a, b] cu valori în C. Tom spune că f este integrabilă în raport eu F pe [a, b] (în sens Stieltjes-Riemann), dacă u şi v sint integrabile atît in raport cu U eît şi cu Y pe [a, b] şi notăm
6 b b b b
[ f dF = iu dU - 1 v dT + i i u dY - i t.v dU
3.4. Propoziţie. Ducă f e integrabilă în raport cu F pe [a, 6], şi asociem fiecărei diviziuni A = (tn.tv ...,/•„) a segmentului [0,1] swma
<r(f,F,A).= Y f(T.) ţ P (*») - P ( i ^ ) ]
atunci pentru orice E > 0 putem găsi un q > 0 «sffrf irecCZ ||A|J< TJ să
impîiee IC f dF - a (f, F , A) < e.
într-adevăr, <j(f, F, A) = c(u, U, A) — a(v, Y, A) + i a (u, Y, A + + ia (v, U, A), de unde se deduce uşor afirmaţia.
48

Din proprietăţile integralei reale Stieltjes-Eiemaim rezultă următoarele proprietăţi ale integralelor complexe Stieltjes-Biemann :
3.5. Propoziţie. Fie t = u + iv, F = U + iV, in, F,2 aplicaţii din [a, o] în C, a±, <x2, e C.
/SW valabile următoarele proprietăţi: 1) Bacă t e integrabilă în raport cu F, atunci F e integrabilă în raport.
cu f si
StăF + \ b
Fdf = f(6)-P(6) — f(a)-F(o)
2) Dacă fx şi f2 s?-«£ integrabile -în raport cu F, atunci atjf] + a2f2 e-integrabilă după F şi
[ («! . t + a2f2) dF == «! [ A dF + x2t f2 dF
3) Bacă î e continuă, F cu variaţie mărginită pe [a, 6], atunci î e-integrabilă pe [a, b] MI raport cu F.
4) D<c (fK; n e X) w«. şir «"e funcţii continue care converge uniform pe [a, 6] eăfr<? f, (FK ; n e N) ww şir defuncţii cu variaţie mărginită care converge simplu către F iar şiraZ F (Fn, [a-, ?>]) e mărginit, atunci
lim V f, dF, = y fdF. »->+oo 1 }
5) Dacă f e continuă iar F derivabilă cu derivată continuă pe [a, blr atunci f e integrabilă în raport cu P şi
[fdF = C f(t) F'(t) d* a a
unde integrala din dreapta este egală cu
b 6
t Mt) U'(t) - Y(t) V'(*)] di + i C [u(i) V'(*) - v (t) U' (*) ] d t
6) Dacă a < c < & şi f e integrabilă în raport cu F atît pe [a, c] cît şi pe [e, &], atunci f e integrabilă în raport cu F pe [a, &] şi
6
= y f OF + \ f dF •
c 6
S f d F +S 4 - c . 603J 49

Teoremele de mai sus pot fi demonstrate şi direct dacă se consideră •proprietatea de la (3.4). ca definiţia integrabilitătii — (vezi [6] pag. 145 — -158).
Să arătăm aici doar o ultimă proprietate. 7) Dacă f e integrabilă în raport cu F pe [a, b], iar h este un omeo-
morfism de la [a', b'j la [a, b], h (a') = a, h(b') = b, atunci f o h e integrabilă în raport cu F o h pe [a', b'] şi
b V
\i dF = [ (foh) d (F°h) a a'
Demonstraţie. Dacă f = u 4- iv, F = U + iV, atunci f ° Ii — = (u°h) -}r i (y o h) şi F ° h = (U ° h) -f? i (V o h) şi vom arăta că
V b
\ (u ° h)d(U oh) = U dU. în mod analog rezultă că
a V o
C (u o h) d (V o h) = ( u d U etc.
: V u dU şi Fie I = \ u dU şi s > 0. Va exista un •% > 0 astfel încît să avem j I
— a (u, U, A)| < e de îndată ce ||A|j < ra. h fiind un omeomorfism al lui [a', b'] şi n (a') = a, li va fi strict crescătoare şi uniform continuă, deci există un r, > 0 astfel ca |h(f) — n(i")| < % pentru orice t',t"e e [a, &] cu [f—i"| < rr Fie A' = (t'0, t[, t'2, ... ^) o diviziune a lui [a', b']. || A' ||<yj şi TJ e [ d , £] . Cotind ^ = h(«J), rk = h(-ri) A = (t0, tv..., tn) va fi o diviziune a lui [a, b] şi ||A||<r t l iar a (u°h , U oh, A') =
= J ] (« ° h ) (Ti)[(U o h) (ţj) - (U oh) (Ci)] = kt v(rk) [U fe)-Ufe-X)]--= G \u, U, A), deci, \I - a (u ° h, U o h, A') | = ] I - a (u, U, A) | < s.
Prin urmare u ° h e integrabilă în raport cu U 4 şi \ u dU = a
b'
= C (u°h)d(TJ°h). a'
Integrala Stieltjes-Eiemann are în teoria noastră doar un rol secundar, fiind folosită pentru definirea integralei complexe.
3.6. Integrala complexa. Fie y un drum rectificabil din iar f o funcţie continuă pe suportul {y} al drumului, cu valori în C. Atunci f o y va fi
•continuă pe [0,1], deci integrabilă pe [0,1] în raport eu y. Această integrală Stieltjes-Eiemann se numeşte integrală complexă (sau integrală Gauchy) a lui f de-a lungul drumului y şi notăm
[ (f o Y) dT = [ f (0 dC = [ f •
50.

De exemplu să calculăm I = \ £d £ 8U(0:1)
Drumul y = SU(0; 1) de integrare e circular (vezi (2.7)) şi y(t) = = cos 2 7u f + i sin 27t i are derivata continuă y'(tf) = 2 ir i (cos 2n*'+
i i
+ i sin 2 - f) şi I = i (f o y) dy = 2 7ri V (cos 2rr f — i sin 2itt). (cos 2TC£ +
• o 1
+ i sin27r t) dt = 2m\ ăt = 27ri.
o Putem defini integrala unei funcţii f şi de-a lungul unei curbe F
(vezi 2.20). Fie T o curbă din C, şi presupunem că T e rectificabilă, adică admite o reprezentare parametrică rectificabilă YV (Se constată uşor că în acest caz orice reprezentare y2 a ei este rectificabilă). Dacă f este continuă pe {yx}, atunci prin integrala lui î de-a lungul curbei Y înţelegem integrala lui f de-a lungul lui yx. Dacă y2 e un alt element din F, atunci. există un omeomorfism h crescător astfel încît Y2 = Yiof l- YI fiind CU variaţie mărginită, f ° yi e integrabilă după y2 pe [0,1] şi aplicăm (3.5. f o YJ ° h va fi integrabilă după yx ° h, adică f ° y2 după y3 şi V f = \ £ *H Prin urmare integrala nu depinde de reprezentarea parametrică aleasă şi o vom nota cu Kt.
J r 3.7. Proprietăţile integralei complexe. Fie y e ® (%, #2) YiG ^izzi ss)
drumuri rectificabile, g, î aplicaţii continue din {y} fe C, a, | ieC. Atunci' 1 ) \ : - ' - : ^ -r: • •• - - . •" \
Y V Y
2 ) V f = - '
r
Y Y
3) Daca f e continuă şi pe {yi}, atunci c e r
Y U Yi Y Y i
4) Dacă (y17 y2, . . ., yB) e o descompunere a lui y atunci
î 'Y=s\ 'fi
5) Dacă |f(y(*))| < ilf, pentru orice te [0,1], atunci
.f <Jf-V(Y)
5*5!

6) Dacă y e un drum liniar, atunci
îi
7) Dacă G e o mulţime deschisă din C, f : G - > C c continuă, (yn : »e N) «<« şir de drumuri rectificabile cu suport în & ce converge uniform pe
[0 ,1 ] cĂf/r Y; {*;} c G, ?'" mulţimea V (Yn) e mărginită, atunci \î t' un şir
convergent de numere complexe şi
sH1 V„ T
8) Dacă Y e <<<" f?r?fw rectificabil din C, (f„ : n e X) «H şir de aplicaţii continue din {y} în C uniform convergent, pe {y} către î, atunci
\u-[ lim \ f „ = \ f n-»oo
9) Dacă Yi e ra drum rectificabil din C, Y] echivalent cu y, si î conţi-r r
nuă pe tYi}> atunci \ f = \ f
Demonstraţie. Proprietatea 1) rezultă din (3.5.2), 7) şi 8) din (3.5.4), şi (3.2.6). Proprietatea 9) s-a demonstrat la, (3.6), iar 5) se deduce din (3.4),
căci sumele integrale ale lui \ f sini J] f(Y(Tfc)) [Y(**) ~ Y ( ' * - I ) ] Ş* modulul i Cf sînt Ş f(y(T,)) [T(<
acestei sume e majorat de M. V(Y). 6) Dacă y(t) = (l—O^i + te2, atunci 7 e derivabilă şi y'(t)
deci l f = Wf o y ) dy = {z2 - zx) . \ f [(1 - «fo + fe8) df kf = W f o Y ) d Y = ft-nJ^ti
2), 3), 4) se demonstrează pornind de la definiţia operaţiilor efec-r
tua te asupra drumurilor. Suma integrală a lui l f corespunzătoare lui
A = (tm t,, ...,tn) este c(î c Y- , Y - , A) = £ f (Y (1 - T i)) [Y (1 - **) -
- Y ( l - 4 - i ) ] . JSTotînd /;. == 1 — ZB_&, Tţ = 1 —T„_Ş + 1 , A' = ( ^ , ^ , - . . , t'n) va fi o nouă diviziune a lui [0,1] şi T{. e K _ i , 4 ] deci înlocuind » — 7s + 1 — m,
52

obţinem
i(f o y- , r , A) = £ f(y (<_t+1)) [y(C*) - Y(Cw)] = s - 1
= - S % (T-«)) h'(4) — Y(4- I ) ] = - ff(f ° Y> Y5 A ' )
şi || A || = || A'||. Prin urmare yf = — T Y
3) e un caz particular al formulei 4) I alegînd n= 2 şi diviziunea
0, —, 1 j ]. Eăinine să demonstrăm eă (-,-, . . ., Y») fiind descompunerea
lui y după diviziunea A = {t0, tv . . ., tn) avem
i^=\, k =
Prin definiţie (2.12) avem ••,• = y ° hft, unde h,: e un omeomorfism al lui [0.1] pe [/,v_1: £*], şi descompunînd integrala avem
( f = f (f ° y) dy = £ [ (f o y) d y iar r o *»_,
I , = \ (f o y) dy = [ (f o - o h) d(y c hk)
l i i
conform (3.5.7) deci [ f oT , d y f t = \ f, d e c i i f = A Ş \f. 0 • *
3.8. Observaţii şi exemple. 1) Partea reală şi cea imaginară a lui f poate fi calculată în felul următor :
Y
Dacă f = U + iv, y = a — i3, atunci \î = Y (f ° y) dy = [ [u(a, ;3) da — Yi 0 0
— V (a, 3) d3] - i i [u(a, 3) d3 + v(a, 3) d a].
Aceste două integrale sint integrale Stieltjes-Eiemann reale sau pot fi considerate şi ca integrale curbilinii de speţa a doua, căci acestea
53

se calculează tocmai ca integralele Stieltjes-Paemann
y = \ (u d a — v d (3) + i i ( u d |3 + v d a) Y r
2) Putem defini în analogie cu derivarea formală după \ şi integrarea formală după ăc, prin
C f(o d? 5 f /(o d? Y Y
3) Pentru a găsi o corespondentă complexă şi integralelor curbilinii de speţa întîi putem considera sumele integrale
o(î o Y, Y, A) = £ (f g y) (Ts) |y(4) - y(^-i) I
şi limita lor o notăm cu V f (£) | d£. Dacă y are derivată continuă vom avea
Y i )
f(Q|d£| = U(Y(«))lY'(0!d< =
f(y(i)) F«'2(0 +p ' 2 ( i )d î = \ f d s
tocmai integrala curbilinie de speţa întîi . 4) Cu ajutorul integralei introduse la 3) putem da o nouă formulă
de majorare care e uneori mai avantajoasă decît (3.7,5) şi anume, din
|er(foy,y,A)| = \Y(i .y)(TS) [yfe) - y(**_i)]l <
< S |(f»Y)te)|-lY(**)-Y(**-i)l =
= 5 ( | f | o Y , Y i A ) rezultă
o) Putem arăta că in'
Cf«) dd<(|f(oi|d(:i Y
1
tegraia I = \ f((1—1)0! + fe2) di tinde către
f(%), dacă 22 tinde către %. într-adevăr, ffo) = I f(%)d£ ş ipentrue> 0 o
54

există un 7]>0 astfel ca |z' — z"\ < y să implice \i(z') — f(s")| < e. Dacă|«2—%l < vj, atunci | ((1—t)z1+tz2)—zx\ = \t\ \z2 — zx | < j ^ — % | < rj, deci |f((l—<)»! + tz2) — f(%)| < s, pentru orice i e [0,1], prin urmare
\I - / ( % ) ! = k[f ((!-*& + fea) - ffo)] di < e.
6) Din (3.7.5) rezultă imediat că pentru un drum punctual y avem f = 0.
7) Să calculăm Z = vf şi să-i aplicăm formulele de majorare Y
(3.7.5) şi (3.8.4) pentru y(i) = 1+t, î{z) = z. Integrala o putem calcula conform (3.6), şi (3.5.5) prin
i i
I = [ %(«)) Y'(<) d< = [ (1 + «) d* = i Cum V(Y)=1 şi M=sup{ |%(*)) I : o o
te [0, 1 ] } = 2 , formula (3.7.5) ne d ă j | l | < 2 , şi Ix = C|f(Q||d£| =
r i
= %f#2 +y2 ds, unde a? = 1+t, y = 0, deci A = \ (1+*) d£ = — deoarece
4.s"=Yx'2 + y'2dt. Prin urmare formula (3.8.4) ne dă \I\< — şi avem
chiar egalitate. (Acest rezultat se datorează faptului ca f(y(2)) ia valori reale şi pozitive la fel ca şi y'(f).)
8) Să se calculeze \f, unde %z)— -—, iar y = yx U y2 U y3, unde Yi şi J r -;'3 sînt drumuri liniare ce leagă — 3 de — 2 respectiv 2 de 3, iar
y2((.) = 2 [cos - (1 — t) + i sin TC(1 — t]. Funcţia f e continuă pe C\{0}, iar^yj'e inclusă în această mulţime, deci integrala există, căci y e un drum rectifieabil şi integrala va fi egală cu lx $-I2 +13 = [ f + i f + C f. Calculăm Ik
Yi Ya
cu ajutorul formulei Ik — V î(yk(t))Yk{t)ăt J o
şi obţinem Ix= —1, I 2 = 0 şi I3 — = 4-1 deciVf = 0.
-3 ~2 O 2 3
Fig. 3.
55

§2. TEOREMA LU! CAUCHY
3.9. Definiţie. Dacă gE«f (G) şi g'(s) = i{s) pentru orice ze Gr atunci spunem că g e o primitivă a iui f pe G.
Ca şi în analiza reală nu orice funcţie f admite primitivă. Mai mult însă, după cum vom constata, nici măcar funcţiile continue nu admit toate primitive. Dacă încercăm să transpunem pentru funcţii complexe construcţia primitivei unei funcţii reale continue f dată de formula
ff(- m at,
vs: trebui să alegem un drum ce leagă un punct fix zx eu un punct variabil z prinir-un drum rectifieabil -;z. Pentru ca acesta să existe trebuie să admitem eă G este un domeniu.
Dar 1 1 va depinde in general nu numai de z ci si de drumul ales. J
Eezultatul central al acestui paragraf e teorema iui Cauchy (3.16) — care permite să găsim condiţii simple care să garanteze că două integrale \ f şi
r V f să fie egale. Prin aceasta vom putea arăta eă pe un domeniu simplu
conex olomorfia unei funcţii implică existenţa primitivei. Hai intîi căutăm un criteriu pentru existenţa primitivei. 3.10. Teorema de legătură dintre primitivă şi integrală. Fie I) un
domeniu din C f : D -> C o funcţie continuă. Atunsi: r
a) Dacă % / = 0 pentru orice contur 7 din I) alunei i admite o pri
mitivă pe D. b) Dacă f admite o primitiva g în D, atunci pentru orice drum recti
fieabil y din D are loc formula lui Newton-Leibniz :
[ î = g(Y(l)) - g(Y(0)),
iar dacă y e un contur f \f = 0-
Demonstraţie, a) Dacă * f == 0 pentru orice contur 7 din D-, fie 0 ura
punct variabil din D şi zx un punct fixat. D, fiind un domeniu, e poligonal
56

conex (2.19), deci există o linie poligonală y, in D ee uneşte % eu z şi fie r
g(z) — \t
Să ară tăm că g'(z0) = f(~0) in orice z0 e I). Pen t ru a calcula g(z) — g{z0) =
— y — \ f, alegem s > 0 suficient de mie pentru ca U(z0; e) c D şi fie
Î E U (z0; s) iar y = y2 u y~ U y^ , unde y e drumul liniar de la z0 la z. Atunci y e un contur şi folosind (3.7.3) şi (3.7.2) avem
0 [ f = [ 1 - { f - [ f, deci
?(*) - g(~o)
= \ f = M 0 ) f [(l-«)*o+fe]cW, Fig. 3-10
^ f= (*-*»A
după (3.7.6) deci
<r(^\ o-f-' ) f — - - - - ° - = V f [(1 — /) .c0 -f te] d/, Această integrală are conform (3.8.:.)
~ ~0 J o
limita î(z0) eînd z t inde la g0, deci g'(z0) există şi e egală cu î(z0). b) Fie g o primitivă a lui f şi y un drum poligonal din 1>. Atunci
există o diviziune A = (/0. 1X tn) ce-1 descompune în drumuri liniare şi pe [fi-1 • o.-l y va fi derivabilă. Ţiuind cont că aici
[gfy(f))]' = g'(y (i)) • y'(t), avem • ' ; . -
n r f = S \ ( f o T ) d Y = S \ g'(Y(*)) Y'(*) d<
V \ [g(Y(<))]' ^ = S fe (Y(**)) - g(Y(**-i))J =
= g (y(U) - g(Y(*o)) = g(Y(l)) - g(Y(0))-
Dacă y nu e o linie poligonală, există, conform cu (3.2.5) un şir yK de drumuri poligonale in B ce converge uniform către y, v„(0) = y (0), y , ( l ) = y(l) şi V(Y.) < T(y).
f f = g (Y,(1)) - g(Y.(0)) - g(Y(l)) " g(Y(0))
Tn
si treeina la limită conform (3.7.7), obţinem formula Fewton-Leibniz.
5?
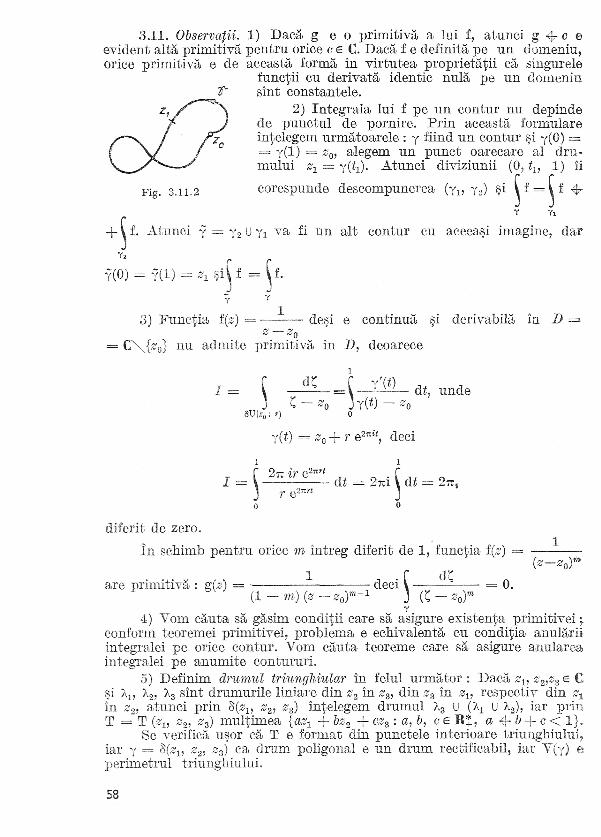
3.11. Observaţii. 1) Dacă g e o primitivă a lui f, atunci g 4- o e evident altă primitivă pentru orice c e C. Dacă f e definită pe un domeniu, orice primitivă e de această formă în virtutea proprietăţii că singurele
funcţii cu derivată identic nulă pe un domeniu sînt constantele.
2) Integrala lui f pe un contur nu depinde de punctul de pornire. Prin această formulare înţelegem următoarele : y fiind un contur şi y(0) == = y(l) = 0O, alegem un punct oarecare al drumului z± = y(f1). Atunci diviziunii (0, t1} 1) îi
Fig. 3.11.2
+ \ f. Atunci
Y(0) = y(l) =
corespunde descompunerea (y1} ya) şi Y Yi
T2 U Yi v a fi u n a,lt contur cu aceeaşi imagine, dar
* \ * - \
3) Funcţia î(z) Z Zn
deşi e continuă şi derivabilă în Z>
= C\{%} nu admite primitivă în D, deoarece
i = di, unde j
8U(Z„: r)
r(«) i + f e ' deci
J r e t o i J
diferit de zero. în schimb pentru orice m întreg diferit de 1, funcţia i(z)
1 are primitivă : g(z) =
( 1 - * » ) ( * - * o ) " deci [ — = 0. 3 n-^r
(*-*o)*
4) Vom căuta să găsim condiţii care să asigure existenţa primitivei % conform teoremei primitivei, problema e echivalentă cu condiţia anulării integralei pe orice contur. Vom căuta teoreme care să asigure anularea integralei pe anumite contururi.
5) Definim drumul triunghiular în felul următor : Dacă zx, z2,z3 e C şi Xx, X2, X3 sînt drumurile liniare din z2 în z3, din z3 în %, respectiv din z1 în z2, atunci prin §(.%, z2, z3) înţelegem drumul X3 U (Xx U X2), iar prin
T (%, 3) mulţimea {as1 + bz2 + czs: a,b, c e R+, « f H K l } . Se verifică uşor că T e format din punctele interioare triunghiului,
iar y = §(%, z2, zs) ca drum poligonal e un drum reetificabil, iar V(y) e perimetrul triunghiului.
53

3.12. Teorema iui Caueliy pentru triunghiuri. Fie zv z2, z3trei puncte necoliniare, 1 = T {zv z2, z3), y = S (%, zz, z3), iar f o funcţie olomorfă pe T şi continuă pe T. Atunci
,f = 0
/?
Demonstraţie, (Goursat). 1) Fie zp, g^, zp <= T şi să arătăm că pentru
vx == S(0^), 4 ° , 413) avem Ix = V f = 0. Fie prin absurd Ix # 0 şi fie ^ = Y l
= V(YI) perimetrul triunghiului Tx = T^r» 4X\ 41')- Să presupunem că am .găsit drumurile triunghiulare ys = S(0 '), 4*>, 4S>) şi domeniile T*=T(»i*),4*)>£s*)) de perimetru lt = 21" t • lx astfel ca T ^ => T2 => . . . =3 T*, iar modulul lui I s =
4 f e mai mare ea i1"". |IX| şi vrem să-1
construim pe Y*+I-Fie b1 = 2~1 (4s; + 4*>), &2 =
= 2-1(*?> + 4fc)), &3 = 2~1(4S> +4*>) mijloacele laturilor si. formăm y' = 8(4fc'\ *si 6»), Y" = S(&3'4S) h), i" = 8(&si &i,
r
/A
* 2 ) , y I V S(6i, Atunci, \ 1 ' 3
'O-
Fia. 3.12
l f + i f + i f - f U , d e c i v' v" Y"' ..IV
\U\ f i I f I I f \t < tf + If + Ifj + jlf
şi cel puţin unul din termenii din dreapta va fi mai mare ca 4~x \Ik\ Notăm acest drum triunghiular cu yft+1, interiorul cu Ts+1, C f = Ik+1.
Perimetrul triunghiului, lk+1 este egal eu 2 - 1 . îft, deci ZM = 2 1 - ( ' m , Z15 37* => = 2Vi i ^ r I , v l > 4"1 • j I , | > 41-*™ | Ix |.
Am obţinut un şir de triunghiuri şi mulţimile Tx => 572 =>... => 2~!„ 3 • • •
sint părţi compacte nevide deci n {Tn : n e N*} e nevidă. Fie z0 un element al acestei intersecţii. Cum z0 e T, f e diferenţiabilă în z0 şi
m = f(*0) - *0f(*0) + ^(*o)+«(*)G*-*o), 3-

unde a. este nulă şi continuă în zg, prin urmare
f = [f(«0) - *0f'(z0)] [ ăK+i'(z0) U d C + f a C M r ~ c0)
"Dar ^ dv vezi (3.11.3) cazul ?0 = 0, m = 0,
respectiv m 1 — şi alegem = — 7î~2- | J J > 0 . Va exista r,~>0 astfel ca. ă implice x(z) şi există ne N* pentru care 7„=21~" 7, <
< 7j. Atunci Tn c U{z0; r) căci pentru orice ; e T„ are loc \"C — .,, >.-. < 7„ < y), deci | x(-) (£ — z0) ; < £ • : ; — z0\ < z -ln şi aplicînd (3.7.5) avem
4 i - ^ x . < ! ^ : = l = c ( 0 ( C - ~ o ) ^ l <e-7 r eV(Y„) = S . Z | = s . 4 i - îî = 4 i - | I 1 |
şi am ajuns la o contradicţie ; avem deci I. = 0. 2) Alegem acum trei şiruri «\"\ a^'\ «,»•> din T ce converg către .c,,
?2, respectiv : , . si fie yn = 8(fli°, oi'0, a|n)). -î^1" etapa 1) a demonstraţiei
rezultă \ l 0 şi conform (3.7.7), avem
lf = l i m i f n-*oo )
= 0.
3.13. Teorema de legătură dintre olomorfie şi primitivă. Fie I) un domeniu stelat în z0, iar dx dn drepte ce trec prin zg, d reuniunea Jur. Bacă f : D -» C e continuă pe I) şi derivabilă pe J) d atenei f admite primitivă pe 1).
Demonstraţie. Fie v. drumul liniar de la ?0 la ~. Suportul lui este
inclus în i ) . deci g definită de g(z) —\? dacă z # ;n şi g(.s0) = 0, aplică D
în C. Să ară tăm că g e o primitivă a lui f. 1) Fie SXG D \ d şi r 1 =d(« 1 , (C \D) u d).
Averii i ' jER^ şi. considerăm ze XJ{z1; ')\). Aplicînd teorema lui Cauchy drumului y =
~,) = v u Y U "•;"• avem 0 = \ f
H adică g(«) — g(%) = u ş i y e dru-
Fig. 3.13 mul liniar de Ia z la :•'-,, de unde deducem ca în demonstraţia (3.10), a) că g'(-i) = li-i l-
2) Dacă z2e (B n d)\{z0}, a tunci z2 e d s pent ru u n k şi alegem r 2 = =d(z 2 î (C /1 ) ) U {d\d,:}) şi pentru : e £7(^2; r2) putem raţiona ca la 1), deoarece f e olomorfa în T(z0, z, z2) şi continuă în ^ («^ ~, ~2)-
£0

3) Mai avem de ară ta t că g'(z0) == f(~0)- Avem g(z0) = O şi conform
cu (3.7.6), avem g(z) = («—*„) ( f((l — t) s — te0) d«, deci ^ Z ^ ^ = 1 /y o1
J ~ " 0 o
1
= i f((l — t) z — fe0) d< şi aceasta tinde către f(»0) cînd s tinde către %
(vezi 3.8.5). 3.14. Observaţie. 1) Dacă f e continuă pe domeniul D stelar în s0 şi e
derivabilă pe D cu excepţia unui număr finit de puncte, atunci unindu-le cu z0 obţinem dreptele d,, . . ., dn şi din (3.13), deducem că f are primitivă. pe I). î n particular, pe un domeniu stelat orice funcţie olomorfă admite primitivă.
3) Condiţia de derivabiliiate e aparent foarte restrictivă pentru a asigura existenţa primitivei. Vom vedea însă mai jos in (3.20), că ea e necesară deoarece în cazul funcţiilor complexe o funcţie nederivabilă nu poate avea primitivă.
3) Fie f(~) = s m ( g ~ %> z pentru z e C \ (0, i] si f(0) = f(i) = 1. Arunci (z — i)~
f e derivabilă pe C \ { 0 , i] şi continuă în C deoarece lim î(z) = = lim î(z) = 1
2-»0
Prin urmare f admite primitivă în tot planul. 4) Teorema (3.13) se bazează pe teorema lui Cauchy aplicată la
drumuri triunghiulare. Teorema lui Cauchy este însă valabilă pentru contururi mult mai generale şi constituie un rezultat central al teoriei funcţiilor de o variabilă complexă. Majoritatea teoremelor ce urinează sînt consecinţe directe sau indirecte ale teoremei lui Cauchy.
3.15. Teorema lui Cauchy. Dacă î e olomorfă pe mulţimea deschisă G, iar y e un contur omotop cu zero in G, atunci
Demonstraţie. Cum integrala din f pe un drum punctual e egală cu zero, e suficient să ară tăm că dacă y0 şi y1 sînt două contururi din G, omo-
tope în G, atunci l f = V f
1) Fie cp: 8 X T->G deformaţia lui y0 în yl5 K= cp(S X T) şi s = d(K, dG). Avînd z > 0 şi o fiind uniform continuă pe 8 xT, există un v ; > 0 astfel încît \s'—s"\ < TJ şi \t'—t"\<-q să implice | <p («', t')—
— <ş(s", t")\ < — şi alegem o diviziune A = (t0. ?,, . . . , tn) a segmentului Zi
61

[0,1] de normă mai mică decît rr Vom nota ss = tk, zhk = q> (s;-, i,;) şi-D3-„t = = U(zjik; s)- Avem D^;c c B şi din o(s, 0) = 9(5, 1) rezultă că zM — zj:n, deci D M = J)j „ .
2) Vom alege contururile X0, Xx, . . . , X„ astfel ca X0 să coincidă cu Yo) Yi Cl1 X„ şi pentru orice j £ 0,?i — 1, fce 1, w şi i e [<*_i, 4] — să avem Xj(f) e Dj.j n -Dj+i,» iar Xn(£) e DK>;.. în acest scop alegem X0 = y0, X„ = y1; iar pentru j e 1, n—1 înlocuim pe y%(2) = 9 (fy, £), care s-ar putea să nu fie rectificabil, printr-un drum poligonal X^=(Y*)A definită la (3.2.5). X}{tk) eprin definiţie egală cu shl- iar X_< e un contur. Pentru t e [4-u h~\ şi j = 0 sau j = n, avem |0* ţ — Xj(i) | = | <p($„ **) — q>(Sj, *)| < — < e şi pentru 3 = 0
2 I "i,t - ?-o (*) I = I <P («i > 4) - ? («o > *) I < — < J> deci
XQ(*) e Dok n D M iar X»(«) e DB,t.
Dacă j e l , w—1 şi t e [**_!,<*] atunci Xj(tf) aparţine segmentului ce uneşte %&_! de ^ ş , deci
i~M - X;(/): ^ | » M - »,,*_!! = j <p(*„ **) - 9(s;> fe-l)l <
<;^i_L.Jr_ = E) (ieci şi m acest caz X;(i) e 2) M n Dj+i,%
c2,

f r 3) Pentru a demonstra V f = \ f e suficient a arăta că pentru orice-
• f - :
™S,=S'' j e 1, n avem \ f = V f. Fie j e 0, n, h e 0, w—1. f va admite pe discul D},k,: A i - i A;
o primitivă (vezi (3.14.1)) pe care o notăm cu gj!c. Cum D},0 = Bs,n convenim să alegem gj:0 = gjtn . Intersecţiiile Dj,k-i n Bh}: sînt convexe,. deci conexe, iar funcţia g;-,i_i — g},;: avînd derivată nulă pe această intersecţie, va fi constantă : #J,I--I ~~ %t.* — c;>* ?* aceasta pentru orice j e 0,nr
hei, n. Pentru a calcula { l = ][] i (f o A;) dXj, ţinem cont că \j(t) fiind
în Dj,k cînd t e pt-i, £*], putem folosi formula lui Newton — Leibniz şi obţinem
r Ţinînd cont de definiţia constantelor c ,* şi de g ,0 = g},„, obţinem \ î =
A; Ti
= V Cj,ic. La acelaşi rezultat ne conduce şi
h \ î = V v (f o Â;^) d X _x, deoarece si X,,^) e D M pentru orice te J *-i J
e [<*_i, **], i e LT^T Dec i [ f = ţ f.Q M<-A ; - i Ai
Din teorema lui Cauchy putem deduce cîteva consecinţe imediate. Din (3.10) şi (3.15), se obţine o nouă teoremă de legătură între olo-
morfie şi primitivă : 3.16. Corolar. Pe un domeniu simplu conex orice funcţie olomorfâ
admite primitivă. • A doua consecinţă ne asigură independenţa unor integrale faţă de
drumul de integrare. 3.17. Corolar. Bacă f e olomorfâ mulţimea ăescliisă G, iar y0, ji sînt
două drumuri rectificabile omotope in G, atunci:
H Yo Ti
Pentru demonstraţie e suficient să aplicăm lui y0 U yf teorema (3.15). •
63

Corolarul (3.17) ne arată cum putem construi o primitivă pentru o funcţie oiomorfă f pe u n domeniu simplu conex D. Alegem u n ~0 e I) fix şi un z € D variabil şi le unim eu un drum rectificabil oarecare •;,,
r IsTumărul g(z) = i f nu depinde de drumul ales şi g va fi conform demon-
j ' < • ;
z
stratiei de la (3.10). o primitivă a lui f. Se mai notează V f = \ f ; l
§3, FORMULELE LUI CAUCHY
î n paragraful de faţă vom folosi teorema lui Caucliy pentru a adinei studiul funcţiilor olomorfe obţinînd cîteva noi rezultate fundamentale. Cea mai importantă e teorema formulelor lui Caucliy, care are un aspect dublu. Pe de o parte , se constată că orice funcţie oiomorfă e nelimitat deri-vabilă, pe de altă parte, ne permite să determinăm valorile unei funcţii olomorfe într-un disc, eunoscîndu-se pe eele de pe frontieră. Din această teoremă vom deduce un şir de noi proprietăţi iar pe urmă o vom extinde la drumuri care nu sint circulare.
Ca şi în cazul integralelor reale, vom întîlni cazuri in care integrala complexă depinde de un parametru. Fie y u n drum rectificabil eu suportul K — {v}, G o mulţime deschisă din C ia rg o aplicaţie continuă din G x K
in C. Atunci pentru orice c s G integrala \ g(z, Z) d* are sens. J
3.18. Propoziţie. Dacă g : G X K -> C e continuă, atunci h : G -» C r
definită de h(z) = \ g(z, Q dZ, este continuă, iar dacă g'z(z, Z) există şi e
r continuă pe G x S, atunci h este oiomorfă în Gşih.'(~) = \ g'(z, Q d~.
Demonstraţie. 1) Fie g continuă si ~0eG. Alegem r > 0 astfel încît V{z0 ;r)tzG şi fie e > 0 dat. g fiind uniform continuă pe U(z0 • r) X K va •exista un r, astfel ca \z — za\ < t] să implice \g {z, Z) — g(z0, Z) <
< —-— si atunci Uz) — h(z0) \ < s5.
2) Dacă şi g'z{z,Z) e continuă iar z0e D, formăm g±: G X K -> C a s t f e l : '
! - M ^ l ^ &if5L^L_, dacă (»£) e G\{z0}) x I I
1 gi(z0, Z), dacă (», C) G {»0} X ^
••64

Se arată uşor că gl e continuă pe G X K şi conform etapei 1) a acestei r-
demonstraţii h^s) = V gt(z, t) d^ defineşte o funcţie continuă h x : 6? -> C, r
deci h^o) = lim \{z). Dar
hl(*0) = [ gfr0l O « , iar hl(s) =. C ^ L ^ f e ^ i d^ = ^ ~ ^ ° > . Y Y
Deci h e derivabilă în z0 şi h'(«0) = \ g2'(0o,C) d*C • l cr'i'-v '<") rîT
v gzi~o>u u^-r
De exemplu, dacă i p : I - > C e o funcţie continuă şi notăm g(z, Q ?(<=) atunci pe G = C\K funcţia h(z) = \ -±±-i- ăl va fi olomorfă şi
; — %
prin inducţie se arată că li va fi nelimitat derivabilă şi
1 (X~z)n x
Acest caz particular este lema privind integrale de tip Cauehy. De remarcat că aici o este definită pe K iar h pe complementul lui K.
3.19. Teoremă. (Formulele Iui Caueîry pentru disc). Fie f : U(z0; r)-> -> C continuă pe U(z0; r) şi olomorfă pe U(z0; r). Atunci î este nelimitat derivabilă pe U(z0; r) şi pentru orice z e J7(20; r) sforf valabile formulele lui Cauehy:
fW(3) = - Î L f _J1?L_ d£ u n d e fc e N. 2m j ( Î : - 2 ) * + I
S!7(z0 ,-r)
Demonstraţie. 1) Verificăm mai întîi formula lui Cauehy pentru Ti = 0. Avînd 0 < \z~z0\ < r, «.e N, alegem rne R astfel ca să avem \z—z0\ < < r„ < r. Avem pentru yB = S C(0O; rn)
2m J l-z 2TU J £ - z
+ T-W-L— 2711 )l~Z
Ultima integrală are după formula (3.11.3), valoarea 2TUI, iar despre penultima arătăm că e egală cu 0. Elementul z e U(z0; r) fiind fixat considerăm
5 - c . 603 23 65

Z variabil pe V(z0• r) şi construim funcţia
ţ - * dacă!;G c7(;0;r)\{^}
f'(«) dacă £ = «
care e derivabilă în Z7(«0 ; ?')\{2} şi continuă în domeniul convex, deci stelat U(z0; r). Prin urmare, g admite după teorema (3.13) o primitivă şi atunci
g(Q de: = 0.
Dar, g(Y„(<))=——~ ^— pentru orice i e [0,1] prin muia re Y»(«) — z
r f(Q - f(0) ^ r A . \ - ^ — du = 0 şi j ţ - * b>
— t f (^ ag = te?)
Alegînd un şir rn < r, ce tinde către r, y„ va tinde uniform către Y = — §U(z0;r) şi se aplică (3.7.7),
2-i j <: - » ' 8U(z„,r)
2) Din formula precedentă putem deduce, aplicînd lema integralei de tip Cauchy (3.18), pentru o = f, că h(«) = \-JQ- ăl e olomorfă,
ic, — z t
pe C\{y} si nelimitat derivabilă, iar derivata ei de ordin k este h'k>(z) = r f(h
= i ——d£. Dar conform punctului 1) al demonstraţiei, pe r>::.-, :/')<= )(ţ-z)*+1
Y
c C \ { y } avem f(z) — b(s) de unde rezultă formulele lui Cauchy 27îi
şi derivabilitatea nelimitată a lui f pe U{z0; r). D Să calculăm 1* = \ —-—- ăz, keZ. E util să transcriem integrala sub
8L"i0:l)
forma Ik = \ ăl. Pentru k < 0; f iz) = • e olomorfă în C. i r * g*
SL-(0:1)
66

•deci aplicăm teorema lui Oauchy şi Ik = 0. Daca k>0 numitorul se anulează şi vom aplica (de la dreapta spre stingă) formulele lui Oauchy alegînd î(z)= s inz,z = 0 şi avemlş = \ dţ — ^ — = ( & — 1 ) !2Tcif(&-1)(0).
3(7(0:1)
Dar pentru k impar f{k~l\z) = rfasin z şi Ik = Q; pentru k = 4« + 2, I4B+a = = (4H — 1)! 2m, pentru k = in, Iin — — (in—1)! 27ri.
în privinţa legăturii dintre olomorfie şi existenţa primitivei, am constatat la (3.16), că pe domenii simplu conexe olomorfia implică existenţa primitivei. Reciproca e valabilă chiar pentru orice domeniu.
3.20. Teoremă. (Morera). Dacă o funcţie complexă admite primitivă pe o mulţime deschisă G, atunci ea e olomorfă -pe Gr.
într-adevăr, dacă g e_ o primitivă a lui f şi z0 e G, atunci alegînd r > 0 astfel încîţ_să avem U(z0; r) a G, g va fi olomorfă pe U = U(z0; r) şi continuă pe U, deci conform teoremei (3.19), g e nelimitat derivabilă pe U. deci în particular există g"(z0) care însă coincide cu f'C o)- Deci f e olomorfă pe ( ? . •
O altă importantă problemă a teoriei funcţiilor olomorfe este de a determina diferite categorii de subniulţimi ale unei mulţimi deschise G pe care funcţia fiind derivabilă să atragă după sine olomorfia ei pe G. în acest scop vom spune despre o mulţime de drepte că e local finită pe G, dacă orice punct z0e G admite o vecinătate ce intersectează doar un număr finit de drepte din mulţime. De exemplu, mulţimea dreptelor de ecuaţie
i a? = —, ne N* e lccal finită în U(l ; 1) dar nu e local finită în Z7(0 ; 1).
n 3.21. Propoziţie. Dacă G e o mulţime deschisă şi d e reunirea unei
-mulţimi de drepte local finite în G, iar î e o funcţie complexă continuă pe G şi derivabilă pe G\d, atunci ea e olomorfă pe G.
într-adevăr, pentru orice z0 s G putem alege r 5> 0 astfel ca JJ(z0; r) să fie inclusă în G şi să nu conţină decît un număr finit de drepte, ce trec prin z0. Teorema (3.13) ne asigură existenţa unei primitive a lui f pe U(z0; r) iar de aici rezultă derivabilitatea în z0 (vezi 3.20).
Vom rezolva acum problema de a „uniformiza" într-un anumit sens o aplicaţie multivocă.
Să considerăm spre exemplu aplicaţia multivocă Log definită în capitolul doi. Să presupunem că z ia valori de la 1 la 2 prin valori reale. Atunci e uşor de văzut că putem alege pentru fiecare z una din valorile lui Log z (de exemplu cea reală) astfel ca aplicaţia univocă astfel obţinută să fie continuă. Dar dacă pornim de la valoarea 27ri pentru z = 1 şi adăugăm valorilor reale precedente alese 2~i obţinem o nouă funcţie continuă. Acestea vor fi ramuri ale logaritmului complex. Mai general: Fie B c C, A : D-^.i^C) o aplicaţie complexă multivocă, iar G o parte deschisă dinD. Tom spune că funcţia f : G -> C e o ramură uniformă a lui A, dacă f e olomorfă şi pentru orice z e G, avem î(z) e A(z).
Dacă A e aplicaţia inversă a unei funcţii g : D± ^>- D şi î:G -> C o ramură a iui A, atunci f e injectivă, deci admite ca inversă restricţia lui g la i(G).
Demonstrăm existenţa unor ramuri uniforme şi chiar unicitatea lor, dacă se fixează o valoare iniţială (asemănător problemei Oauchy la ecuaţii diferenţiale), pentru aplicaţia multivocă Log. Pentru a uşura însă aplicarea ei. o vom enunţa direct pentru o funcţie compusă Log ° g, şi pentru gx.
23 67

3.22. Teorema ramurilor uniforme. Fie B un domeniu simplu conex din C, g o funcţie olomorfă pe D ce nu ia valoarea 0 ; z\ un punct din D iar Wi, w2, a£ C numere pentru care w3 e Log g(%), w2 e [gfe)]01. Atunci există exact cîte o funcţie f1; f2 G (D) astfel ca îx să fie o ramură uniformă pentru aplicaţia multivocă Log o g şi f1(s;1) = w,, w f2 pentru ga şi f^zf) = w 2 ; în plus î[(z) = - ^ M . , f2(z) G a[g(z)]«-i.g'(«).
g(*0 g'(*) Demonstraţie. 1) Fie h(.«;) = . Cum g(») # 0, li este olomorfă pe g(«)
domeniul D şi aplicînd teorema (3.16) va exista o primitivă 1 a lui. h pe D şi
\Y(z).g(g) - g'(*)] e'W __ [g'(«) - g'(«)]-e5f = Q
g(*0 »-2(0) g\z)
Deci eî(2) = c-g(^). Exponenţiala nu ia valoarea 0, deci c # 0. Să alegem constanta h e C astfel încît f1== 1 -f fc să îndeplinească condiţia f j^) = w1} adică fc = wx — !(%). Atunci f1G^f(D) e ramura uniformă căutată, deoarece
6/l(z) = eHz) . e* _ e!(2) . eWl . e-l(«l) = ^iMfilMflJ _ tffe) SÎ c-g(%)
fx(*) G Log g(z). Avem ^(sr) = l'(») = - ^ - ) -gi«J
Dacă fx e 3?(D) ar fi o altă ramură uniformă cu proprietatea î^z-J = «= ww atunci g{z) = efi« = efi!z>, deci efiW_fiW = 1 şi derivînd : [î[(z) — — ^(ar)]-e5w-fiW = 0, de unde rezultă f^) = f{(*). Avînd f ^ ) = f ^ ) , deducem fj = flt
2) Fie acum w2e C un număr pentru care W2G [g(%)]a = eaLogs(-"i) şi alegem w1 G Log g(%) astfel încît să avem Wg = eawi deci putem construi după 1) o funcţie fx olomorfă în D astfel încît să avem AV, — f,(%) şi f3(«)e e Log g(z) pentru orice st G D. Definim f2(c)= eail{z](z e D). Atunci f2 e 2%(D) şi f2 (z)e eaL°sei~i = [g(z)f pentru orice' ze D, f2(«1) = ed>w = eawi = w2, iar f20) = ot^(*)tf*« = « i ^ - e « W £ a g ' f e ) - ^ ^ - =a-g'te)rg(«)]«-i. Dacă,
g(*0 ' v g(~) f2 G Jf(D), \{z) G eaL°ssW şffgfo) = w2, atunci h = % : f2 e ^f(D) şi j 7i(.«) | =
Ini Me\ = |ea2sW.n.i | = e-te*(*)* u n d e 6 = Im a, &(«) G Z. Deci ft(«) = L ^ 1
2&7T fiind continuă e constantă, prin urmare li e constant. Cum h(%]=l rezultă că u = f3-
Formulele lui Cauchy date la (3.19) sînt valabile nu numai pentru drumuri circulare, dar pentru generalizarea lor avem nevoie de noţiunea de index al unui drum.
3.23. Indexul unui drum faţade un punct. Considerăm două contururi : Yi(0 = ^™ Şi Y2W = e4~"- Când t parcurge intervalul [0,1], y1(i) ocoleşte pe cerc o dată originea, y2(t) de două ori. Dacă vom calcula integrala \ f pentru funcţii f ce n-au primitivă deosebirea poate fi impor-5 68

i U I . tantă. De exemplu, V —— va fi egală cu 2ra pentru primul contur, iar pentru
al doilea cu ârd. Dacă încercăm. însă să dăm o definiţie precisă noţiunii, de cîte ori
ocoleşte conturul y punctul z0e C, vom constata că nu e uşor a găsi o caracterizare riguroasă pentru acest număr. Ori fără aceasta nu putem calcula I . . s a u mai general 1— j d£. Pentru a ©coli această piedecă, vom j ţ — %o ' J Z— Zoi y Y
folosi tocmai prima integrala pentru a defini numărul de rotaţii, ca pe urmă să o putem folosi la calcularea celei de-a doua integrale.
Fie y un drum rectificabil clin C (nu neapărat închis) şi 0oe C\{y}. Prin indexul lui y faţă de % înţelegem numărul
- , d<; i2ni J
în teorema care urmează vcm enumera principalele proprietăţif ale indexului. în ea vom folosi următoarea noţiune:
O aplicaţie f a mulţimii deschise G în C se spune a fi local constantă, dacă e constantă pe fiecare componentă conexă a lui G. E evident că pentru aceasta e necesar şi suficient ca f să fie derivabilă pe G şi derivata să fie nulă.
3.24. Teorema indexului. Fie y un drum rectificabil din C : a)Dacă drumul y2eomotop cu-^ înC\{zQ], atunci n{yvz0) = n(yz,z0). b) Bacă y = y± U y2, atunci ??(y, z0) <= n{y-xl z0) 4" ^(.Ys; CO;-c) « ( Y " J « O ) = — ^ ( T Î ^ O )
Fie acum y un contur din C d) Dacă z0e C\{y}, atunci n(y, z0) e un număr întreg. e) Funcţia j(z) = ?i(y. z) e local constantă pe € \ { y } . f) Dacă y = 5Z7(^0 ; r) şi z e U(z0; r), atunci m(y, 0) = 1. g) t \ { y j are exact o componentă nemărginită. Dacăz0 îf aparţine aces
teia atunci «(y, z0) = 0. h) Mulţimea {ze C: «(y, 2) 5 0} e mărginită. Demonstraţie, a) rezulta din (3.17), b) din (3.7.3) şi c) din (3.7.2). d) Fie y un contur, adică un drum rectificabil şi închis, iar z un ele-
f (\y
ment fix din C\{y}. Pentru a calculai-—— în lipsa unei funcţii primitive Y
pe C \ J » , vom descompune integrala într-o sumă de integrale pe dramuri cuprinse în domenii simplu conexe ce nu conţin pe st, în care • ca funcţie
Z — z de £ admite primitive. Fie s = d(z, {y}). Va exista YJ > 0 astfel ca \t'—t" | < < vj să implice | y(t') — y(t") | < e şi fie A = (*0, f1; . . ., tn) o diviziune a lui [0,1] cu | | A | | < T J iar gt• = y(fs). Atunci yfo, *»+1]c J7fe; s) şi fie (YJ, . . ., y j descompunerea lui y după A. Yom avea {yt} <= J7 (s's_x; s) şi
„ ( Y , . ) = J^C_*L=£J_C_aL 2*i J c - s Ă i 2 m ) c - «
t c

Aceste integrale le vom calcula din aproape în aproape. Alegem z0 =• = y(O) şi un w 0s Log (z0 — z). Aplicînd teorema ramurei uniforme pentru g(ţ) = ţ - z , există î0e^(U(z0; e)) astfel ca î'0(ţ) = — — , f0(Q e
£ — z eltogiţ—z) şi f0(»0) = w0. Alegem ramura uniformă î±e 3^(TJ (z1; s)) a lui Log (%—z) astfel ca să avem f ^ ) = f ^ ) şi aşa mai departe. Atunci,
«(Y, *) = — r £ P*(«*+i) - **(«*)] =
1 _ rf /« \ f f~ M __r rf (c \ i 'v M
Dar f„(£) şi l0(Q sînt ramuri uniforme ale iui Log (ţ—z) deci f„(;îo) ¥ î0(z0) e Log(«0 — z), prin urmare f^o) — 4(?o) = 2kwi unde fc e Z. Atunci w(y, 0) = i e Z
1 f dv
e) Fie ](z) = v — — si ~e C\{v}, j e derivabilă — lema (3.18)
1 r dy
pentru <s(Z) = 1 — si i'(z) = \ ——
Dar g Q = admite o primitivă în ţe C\{z], deci j'(») = 0 si j este (ţ-z)°~
constantă pe orice componentă a lui C\{-,-}. f) Dacă y = SU (z0 ; r), atunci n(y, z0)~l — (vezi (3.11.3)) — deci
n(-{, z) = 1 conform punctului e) pentru orice z e U(z0 ; r). _g) {y} fiind compactă, există r > 0 astfel ca {Y}<= C(0; r), deci
C\J7(0 ; r ) c C \ { Y } şi există o componentă conexă G0 a lui € \ { y } care include mulţimea eonexă_C\Z7(0 ; r). Celelalte componente, vor fi atunci disjuncte faţă de C\U(0;r), adică sînt mărginite, fiind incluse în U(0;r).
Pentru a arăta că j \G0 = 0. considerăm în G0 un şir (zn:neN*) ce tinde spre 00. j(zn) e constant. Dar,
... .. 1 |f d< d;: ^ V(y) . . . F(Y) n < — si lim —— = 0
deci pentru z0e. Ga arbitrar, j(%) = lim j(zn) = 0. Deci j \G0 = 0. n-*oo
h) rezultă din g) deoarece în componenta_ nemărginită indexul este 0. iar celelalte componente sînt toate incluse în (7(0. r). •
Fie de exemplu %, «„, »3 trei puncte neeoliniare din C. z e T(z±, zz, z3) 1 [ d^ si -• = $(%, z2, z3) (vezi (3.11.5)). Atunci, n(y, z) = \ • se calcu-
lează descompunînd în trei integrale pe drumuri liniare şi obţinem n(y, z) = 1. Un rezultat analog se obţine şi pentru un drum Y = Yi U Y2 U U Y3U Y* unde Y» s m ^ drumuri liniare ce parcurg laturile consecutive ale
70

unui patrulater iar z un punct interior. Dacă z0 e exterior, atît la triunghi cît şi la patrulater obţinem conform punctului g) n{y, z0) — 0.
3.25. Teoremă. (Formulele lui Cauehy pentru contururi oarecare.) Dacă le o funcţie olomorfă pe mulţimea deschisă G atunci ea e nelimitat derivabilă pe G şi oricare ar fi conturul y, omotop cu zero în G şi ze G\{y}, vom avea :
n(-(, z) .fW(«) = — C ^ d£ 2-i ) {-C-z)^1 -
r
pentru orice k e N. într-adevăr, _f_ e nelimitat derivabilă în orice z0 din (?, căci alegînd
r l>0 astfel încît U{z0;r)<=G, putem aplica (3.19). Formula din enunţ se demonstrează exact ca la (3.19), şi anume, mai întîi h = 0 pentru care avem :
i r i(Q i r f(q = m ,,r , m C d^ <S7U J L,
Ultima integrală e egală cu 2-i-n(y,z) iar penultima e egală cu zero deoarece e egală cu \ g, unde
î(Q - Uz)
g(Q = > }
f'(«) clacă
g e evident derivabilă pe ( ? \ {Z} şi continuă în G, dec; conform (3.21) ea e olomorfă în G. Din ge 1^{G) deducem aplicînd teorei- a lui Cauehy căVg=0. Am demonstrat formula lui Cauehy pentru conturul y şi h—0.
Y
Cazul general rezultă de aici folosind lema (3.18). • Vom deduce acum cîteva importante consecinţe teoretice ale formulelor lui Cauehy.
3.26. Propoziţie. Dacă f = u + iv e o funcţie olomorfă pe mulţimea deschisă G, atunci u şi v au derivate parţiale continue de orice ordin şi sînt funcţii armonice.
Avînd î'— u'x-\-\Yx — Yy — m.y şi f derivabilă, rezultă că u'x, vi sînt continue în G şi aplicînd teorema lui Cauchy-Eiemann lui f vor exista derivatele parţiale de ordin doi şi aşa mai departe. Din u'x obţinem, derivînd după x că u'x'x = vyx iar elin u£, = —Y'X, derivînd dup: y obţinem u'y'y = — v'xy. Aplicînd teorema lui Schwarz avem u"x + uy'y = 0 şi analog v« #-v^ = 0. O funcţie u : G ~> R care are derivate parţiale de ordinul doi continue şi verifică această ecuaţie se numeşte funcţie armonică. •
<
71

3.27. Observaţii. 1) Dacă f = u -f- iv e olomorfă, atunci u şi v nu numai că sînt funcţii armonice de două variabile, dar sînt legate între ele de condiţiile lui Cauchy-Eiemann. Două astfel de funcţii armonice se numesc conjugate.
Dacă invers, se dau două funcţii u, v de două variabile, diferenţiabile pe mulţimea deschisă 67, care verifică condiţiile Cauchy-Eiemann, atunci u -f iv va fi olomorfă pe G, deci u şi v vor admite derivate parţiale de orice ordin şi vor fi armonice.
2) Dacă se dă numai o singură funcţie u : D -> R pe domeniul simplu conex D şi căutăm condiţiile în care există o altă funcţie v astfel ea u H» iv, să fie olomorfă pe D, atunci evident, e necesar ca u să fie armonică. Să arătăm că aceasta e şi suficient.
într-adevăr, considerând funcţia f = u + iv, unde îi = u i , v = — u£ f va fi definită pe D iar u şi v au derivate parţiale continue, de ordinul întîi şi ui = uii = — u'y'y = v'y şi % = uiy — uy'x = —vi. Prin urmare teorema lui Cauchy-Eiemann ne asigură că f e olomorfă în D, iar din (3.16) rezultă că f Jadmite o primitivă în D : iie f = u + iv o primitivă a lui I. Atunci ui. —v^ şi u^=—vi . Cum însă f' = u i + ivi = f = u £ — iUy, rezultă c& ui = ui şi % = u'v, adică, u = u + c, deci f = u -f iv = f — c, e o funcţie olomorfă pe D. v e o funcţie armonică conjugată funcţiei date u.
3) Fiind dată funcţia armonică u în D simplu conex, există o funcţie olomorfă f = u 4* iv pe D. Pentru a determina pe v procedăm aşa :
dv = vi d.» 4* v'y ăy = — u'v dx 4- ui dv
şi expresia din dreapta e < diferenţială totală în D, şi putem integra pe un drum oarecare din D. De exemplu dacă D — C pornim de la(a?0, y^ şi pe verticală mergem pînă la {x0, y), apoi pe orizontală pînă la {x, y) t
x y r r
r(x, y) - v(x0, y0) = - Va,v(x0, y) dx 4- Ui(« , y) dj/ * o y<>
de unde v(x, y) o egală cu expresia din partea dreaptă plus o constantă. De exemplu, 'iacă u = ln (x2 + y2), aceasta e o funcţie armonică
în C\{0} care însă deşi e domeniu, nu e simplu conex. (Se poate arăta că nu există nici c funcţie olomorfă f = u + iv pe C\{0}). Alegînd D = {x 4> \y £ C : o > 0} un domeniu simplu conex în care u e armonică vom avea :
Y(X, y) - v(a?0, y0) = 2 arctg 2- - 2 arctg •% x x0
deci Y(X, y) = 2 arctg — -£ C. într-adevăr, i{x + iy) = In (x2 4> y2) •
4> 2 arctg - - ^ { î e o funcţie olomorfă pe D şi anume e o ramură uni-x
formă a aplicaţiei multivoce 2 Log. 4) Fie f olomorfă în G, z0e Q şi f'(z0) ^ 0 . Atunci din (2.39)
0 ,& |f'(*0) |» = ui2 4- vi2 = u'xv'v - n X = ^ n > Y )
0(0,2M
72

Iaeobianul transformării fiind nenul şi derivatele parţiale continue, din teoria transformărilor regulate rezultă — (vezi [21] pag. 648) — că există. © vecinătate V a lui «0 şi una U a lui î(z0) = w0 între care f stabileşte un omeomorfism. Fie f-1: U -» V aplicaţia inversă, f-1 e derivabiiă în w0, deoarece fiind bicontinuă z -> z0 e echivalent cu w -> w0 şi 0 =£ 0O implică
, . ,. f-^w) - f-\w0) .. * —au " 1 w 56 w0, deci Mm — 5 —— = lim - • -'• w — "W'o l i m — — ^ g ° ^
Deci (f-x)'(w0 f'C*o) f'K)
Din această proprietate se poate deduce eie exemplu existenţa unei inverse univoce pentru funcţia w = e2 în vecinătatea fiecărui zg, dacă se dă perechea z0, w0 astfel ca w0 =ez°, deoarece (e3)' = ez nu se anulează. La (3.22), noi am arătat însă mai mult : existenţa inversei (adică a unei ramuri uniforme a lui Log) pe un domeniu dat.
3.28. Propoziţie. (Inegalităţile Jui Cauehy.) Dacă f e olomorfăpe 6 => r> U(z0; r) si M = sup {\î[z) | : z e Î7(«0; r)}, atunci pentru orice n e N aw;n :
| *•>(*„) | < n ţ - ^ .
Avem doar să majorăm formulele lui Cauehy
2T: j 3 ( Î : - ^ 0 ) " + 1
8u(*8;f)
• 2r7T = W ! > . • 2TC r B + 1
O consecinţă imediată a acestei inegalităţi este 3.29. Teorema lui Liouville. Dacă o funcţie i e întreagă {deci olomorfă
pe C) şi mărginită, atunci e identic egală cu o constantă.
într-adevăr, ] f (za) | < ^— va fi adevărată pentru orice z0 e C şi r
r e R+ — unde M= sup {|f(s) I : 0 e C} — deci dînd lui r valori trezind către + co obţinem \î'(z0) j = 0, adică f' = 0. Dar atunci f = c. •
3.30. Observaţii. 1) Teorema lui Liouville este caracteristică funcţiilor complexe. Există funcţii reale nelimitat derivabile, mărginite, care nu sînt constante, ca de exemplu, î(x) = sin x.
2) Rezultatele obţinute în studiul funcţiilor complexe pot fi aplicate şi in alte capitole ale matematicii. Vom da aici o primă şi foarte simplă demonstraţie a teoremei fundamentale a algebrei.
La algebră, se demonstrează, că orice polinom cu coeficienţi complecşi de grad » > 1 are cel mult n rădăcini. Teorema fundamentală afirmă eă există cel puţin o rădăcină. De aici, cu ajutorul teoremei lui Bezout se deduce uşor că polinomul are exact n rădăcini. Teorema, deşi curent folosită în algebră, nu admite o demonstraţie simplă, care să folosească metode algebrice.
3.31. Teorema fundamentală a algebrei. Orice polinom P(0) = «cr-+-
•*M32-î~. • • +«»»", cu %• 6 C, «E=£0 şi n > 1, are cel puţin o rădăcină tn\d.
73

Demonstraţie. 1) Să presupunem prin absurd că ar exista un polinom de grad it > 1 ce nu are nici o rădăcină. Atunci
m p(»)
este Întreagă şi lim %{z) = 0. Prin urmare există r > 0 astfel ca z > r să implice \î(z) | < 1. Dar itf = sup {|f(s) | : z < r} e finită, deoarece f(Z7(0 ; /•)) e compactă. Avem \î(z)\<31 + 1 pentru orice »e C. Aplicînd teorema lui Liouville, î(z) = C pentru orice ze C. adică P(«) = — şi P ar fi de grad 0
0 contrar ipotezei. O
§4, FORMULELE LU! SCHWARZ Şi POISSON
Să considerăm o funcţie olomorfâ pe U(z0 ; r) şi continuă pe Z7(»0 ; r). Formula lui Cauchy (pentru Ic = 0) ne permite să deducem valorile lui f în orice z e Z7(s0; r) cu ajutorul valorilor î(Q luate pe frontiera discului iX s«?r (0O ; /•)). Formula lui Poisson ne va arăta că un rezultat similar e valabil pentru orice funcţie armonică. Atunci însă — ţinînd cont că partea reală a unei funcţii olomorfe e o funcţie armonică u şi aceasta determină funcţia f, conform cu (3.27.2) făcînd abstracţie de o constantă imaginară — funcţia f se poate determina în U(z0; r) dacă cunoaştem valorile părţii reale pe £U{z0; r). Această legătură este dată de formula lui Scirwarz. Pentru simplificare vom alege z0 = 0.
3.32. Propoziţie (Formula iui_ Poisson). Fie u o funcţie armonică pe mulţimea deschisă G care include XJ(0;E), iar z = re19e £7(0; B). Atunci,
2TZ
1 f m .. -K2 - r2
u(re19) = — \ u(Reu) •ăt 2 - 1 ' i?2 - 2Br cosit
ei Demonstraţie, Există un s > 0 astfel încît D = 17(0 ; B -\* s) c G.
D fiind un domeniu simplu conex, există o funcţie f olomorfă pe D a cărei parte reală să fie u şi pentru aceasta avem notînd y = 8 £7(0 ; B)
1_[ f Q Ay 1 r f(y(r)) J ,
2m } Y(T) - z îiZ] = l)f^CZ=~^'' -'—'— ' " d
Cum Y(T) =Be2ni~, •/(.') = 2m.Be2*1*, folosind substituţia 2TUT = t, obţinem
(3.33) m=±A±W'>-**!Lăt 2 - 1 Beli - re19
o
74

Considerăm acum punc tu l 7?^ 7?2
—zr= e i e (numit inversul lui z faţă
de cercul dU(0;B)) şi avînd \z*\>R funcţia g(C)
în U(0 ; B), deci
m e olomorfă
ik f Q (K = 0 adică
2n
27ci * re i s f(ifeu) re i{
i?e i e di pe care scăzînd-o din (3.33) obţinem,
f(re i T r i? ?'
i e ) = J _ k f(iJeu)e1 ( — 2 - ] i?eu - rese r e u ~,Beis
ăt =
2n
= f(i?eir)
B2 - r2
deoarece i l (8+0
— gi(i-e) _J_ e
I?2 - 2JSrcos(i - 6) + r2
ift-e) = 2 c os (*— 6).
• d*
Fracţ ia din ul t ima integrală fiind reală, egalînd părţi le reale între ele obţinem formula din enunţ. •
î n part icular pent ru r = 0. obţinem 2 -
i r (3.34) u ( 0 ) = — — Wi(Ee") df = U( JBe2 n l T) d-
care exprimă că valoarea funcţiei armonice în centrul cercului e medie ari tmetică a valorilor luate pe cerc.
3.35. Propoziţie (Formula lui_Schwarz). Dacă î e olomorfă pe mulţimea deschisă G care include pe 77(0:12). f — u + iv, z e 7J(G; R) iar y = SE7(0 ; B), atunci
f(«) "^T u c, z ac iv(0)
Demonstraţie. Găutăm întii o formulă care să determine pe v în funcţie de valorile luate de u pe {-,-}. î n acest scop adunăm formulele pe care le-am scăzut in demonstraţia precedentă.
2 -
— V f(i?e") e" I 2* J LW
o 2 -
- [ f(i?eu> \l
- re i9 reu - J?ele.
2 i2rsin(8 - t)
dt =
B2 — 2i?rcos(0 - t) + r 2 at
75

şi egalăm părţile imaginare : 2rc 2JT
1
v(reie) = 1 f r-om*., , 1 f , B 1 M 2 i f r s i n ( 8 - i ) , ,
— \ v(JSeu) di H \ u(2te") — - — d i 2TU J 2TT J -B2 - 2i?r cos( 9 - t) + r*
o o Dar prima integrală este, conform cu (3.34), egală cu v (0), deoarece şi v e o funcţie armonică. Deci ţinînd cont şi de formala lui Poisson obţinem
f (re16) = u(re19) + iv(re19) =
• rM , 1 f , « ! « ^ 2 + 2iri2sin(Q - i) - r* = iv(0) H \u(i2elf) ! — - d i =
2 - 1 o
2n
E2 - 2Er cos( 8 — t) + r: 2
iv(0 -i U(-Seu : -d i 2TT J E2 + r2- Er[e1(9-{) + 8- i (e-J>]
S=3
0
Eelt + reie , iv(0) + — ( u(Eeu) — - - ' - di. Dar z = re19
' ; 2TÎ 3 %eu ~ reia
o
deci revenind la variabila ? = obţinem 9,-r
I 1 r 7?^ i2 i " i « m =iv(o) + —TUţjte»"1') e + g 2 « i d r
2ra j i?eia — 2 o
y'( T) si tinînd cont că v(-r) = i2e2TCiT deci- t-L— =27ri, rezultă că
I
f(») = iv(0) + — T - \ U £ Y ( T ) ) -i±- ' - — d r 2-1 J Y(T) - 2 Y(T)
o şi atunci,
Î(Z) = iv(0) + ^~ [ u(Q - J - ^ • -Ş . . D 2TÎI J C — » <;
3.36. Observaţii. .1) Formula lui Poisson are o mare importanţă în rezolvarea ecuaţiilor cu derivate parţiale de ordinul doi, de exemplu, în găsirea soluţiei la problema lui Dirichlet de a găsi o funcţie armonică u pe £7(0; E) care pe frontiera 8U{0; E) ia valori date.
2) în mod analog, se poate folosi formula lui Schwarz la a găsi o funcţie olomorfă f în U(0 ; E) cunoscmd valorile părţii ei reale pe frontiera discului.
76
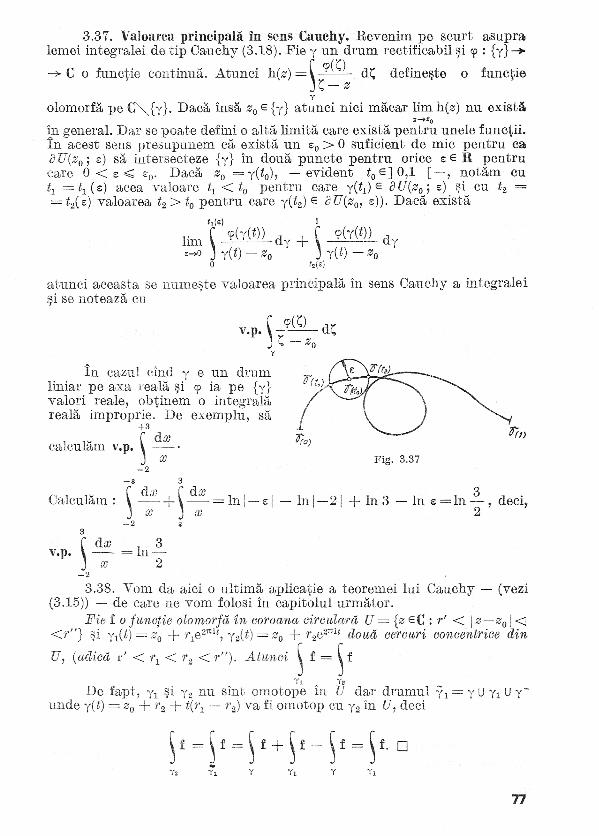
3.37. Valoarea principală în sens Cauchy. Bevenim pe scurt asupra lemei integralei de tip Cauchy (3.18). Fie y un drum rectificabil şi cp : {y}-> -> C o funcţie continuă. Atunci h(z) = \ ăZ, defineşte o funcţie
Y
olomorfă pe C\{y}. Dacă însă 20e{y} atunci nici măcar limh(«) nu există
în general. Dar se poate defini o altă limită care există pentru unele funcţii. în acest sens presupunem că există un s0 > 0 suficient de mic pentru ca 8U(z0; s) să intersecteze {y} în două puncte pentru orice e e R pentru care 0 < s < e0. Dacă z0 = y(t0), —evident i 0 e ] 0 , l [ —, notăm cu tv — tx (s) acea valoare tx < t0 pentru care y(^) e 8 JJ(zQ; e) şi cu tz = = t2{e) valoarea t2>t0 pentru care y{t2) e SU(z0, e)). Dacă există
~° J Y (0 - «O J Y(*) - o :(e)
atunci aceasta se numeşte valoarea principală în sens Cauchy a integralei şi se notează cu
H 9(0 dC
în cazul cînd y e un drum liniar pe axa reală şi o ia pe {y} valori reale, obţinem o integrală reală improprie. De exemplu, să
calculăm v.p. da; x Fig. 3.37
Calculăm : f dx , f dx ) oo J x
= In ! — £ | In j — 2 | + In 3 — In e = ln — , deci,
3
v-P. \ dx
X In
3.38. Vom da aici o ultimă aplicaţie a teoremei lui Cauchy — (vezi (3.15)) — de care ne vom folosi în capitolul următor.
Fie f o funcţie olomorfă în coroana circulară U = {z eC : r' < j z—z01 < <•>'"} Şi Yi(<) r,e- y2(t) = z0 + r2e2TCif două cercuri concentrice din
Yi Ys ;'i Şi T2 n u sînt omotope în U dar drumul yV • r2 -f ^ — r2) va fi omotop cu y2 în O", deci
?7, (adică r' < ^ < r2 < r"). Jiimci \ f = ^ f
De fapt, unde y(£) = 20
y U Yx U Y"
Vi
77

§5. INTEGRAREA FORMELOR DIFERENŢIALE DE GRADUL INTÎI
Am definit în § 1 integrala complexă. Am constatat ca dacă f = u + iv e continuă şi y = x + iy rectif icabilă, atunci \ îdz este egală
Y
cu l uda; — răy + i V udy + rdx = V pda: + qdy, unde p = f, q = ii*. V Y Y
Pornind de la această expresie, prezentăm în acest paragraf o nouă metodă pentru construirea integralei funcţiilor complexe.
Eezultatele prezentate sînt referitoare la integrala complexă, teorema lui Cauchy şi formula integrală a lui Cauchy. Pe lîngă versiunea omo-topică a teoremei lui Cauchy, la sfîrşitul capitolului este expusă o demonstraţie, datorată lui Dixon (1971), a versiunii globale a teoremei lui Cauchy.
3.39. Definiţie. O formă diferenţială de gradul întîi pe G este o expresie de forma co = pd* + qăy, unde coeficienţii p şi q sînt funcţii (eu valori reale sau complexe) continue pe G.
3.40. Dacă y este un drum de clasă C\y e C]([0,1])) şi « este o formă diferenţială de gradul întîi în G, prin definiţie, V oo este dată ele
Y
.formula
3.41. \co=ly*(<o),
unde y*(«) este forma diferenţială î(t)ăt cu
f(*)=p(a(«), B(t)) «'(*) + q(a(«), 3(Z)) P'(<)
unde <x(f) = Rey(i), I3(i) — Im y(t) şi membrul doi ai formulei (3.41) este integrala (în sens Cauehy-Biemann) a unei funcţii continue pe intervalul compact [0,1].
Definiţia integralei dată cu formula (3.41) cu y de clasă C1, antrenează proprietăţile :
1) \ a(to) = a» «, unde a £ C,
r « r 3) i OJ = V l co dacă (yx, ya, . . ., yB) este o descompunere a drumului y.
r - i u ,
3.42. Definiţie. Se spune că drumul y în 67 este de clasă O1 pe porţiuni dacă există o descompunere (y15 y2, . . •, y„) a drumului y cu proprie-
78

tate că orice yk(k e 1, n) este de clasă O1. în acest caz vom defini integrala de-a lungul lui y prin formula
5.43 w_£. = v . i a ,
• 7 ;
S-sS unde membrul doi are sens.
Evident această definiţie a integralei coincide cu cea precedentă dată prin formula (3.41) cînd y este un drum de clasă O1 în baza formulei (3.41.3).
3.44. Propoziţie. Definiţia dată prin formula (3.43) nu depinde de •alegerea descompunerii (y15 y2, . . ., y j a drumului y. Dacă (y1; y2, . . . , y„) este un sistem de drumuri asociat diviziunii A = (t0, tv ..., tn) a intervalului [0,1] (2.15) şi (yi, yâ, . . ., y ) un alt sistem de drumuri asociat diviziunii A' = (fJ, t{, ...,tp) a aceluiaşi interval [0,1] astfel încît yî s * fie de clasă C ^ Î G I , - / » ) . Fie A" diviziunea intervalului [0,1] obţinută din. toate punctele diviziunilor A şi A'. Noua descompunere (y", ...,j'g') a drumului y asociată diviziunii A" este de acelaşi tip cu descompunerile (y1; y2, . . ., yra) şi (y(, y!,, . . . , y ,), adică orice yi' este de clasă C1. Este evident că, în suma ^] \ « regrupînd termenii în două moduri convenabile
k-\ J
f " f * f vom obţine că \ w — V \ w = V U , ceea ce justifică definiţia dată. Q
Fie g e Cfl(i>) (continuu diferenţiabilă de ordinul întîi, adică g ar© derivate parţiale de ordinul întîi continue pe D) şi co = dg, atunci avem :
3.45. Propoziţie. Dacă y este un drum de clasă O1 pe porţiuni atuno Ug = g(y(l))-g(y(0)). j
Demonstraţie. Este suficient de a demonstra propoziţia cînd y este de clasă C1 căci cazul general prin divizarea segmentului [0,1] se reduce la acest caz particular. Avem prin definiţie
i
d(goy). 0 0 0
1 1 1
[dg=U*(dg)=U(y*(g)) =y
cum g ° y : [0,1] -> D rezultă că li = g o y este de clasă O1 şi avem dh = h'(t) ăt şi deci
i
dg = fh'(<) d* = h(l) - h(0)=g(y(l)) - g(y(0)) Q.
Se vede că dacă « = dg cu g de clasă O1, integrala \ co nu depinde de drum Y
şi depinde numai de punctul iniţial y(0) şi punctul final y(l) al drumului y,
7f
Dacă considerăm în locul segmentului [0,1] segmentul [a, b], egalitatea din propoziţia (3.45) se scrie
tfg = g(y<&)) -g(y(«)) .
De aici rezultă că dacă dg este identic nulă în B, atunci funcţia g este constantă în B, deoarece integrala din membrul întîi este 0 şi g(y(a)) = = g(y)(&)) pentru orice y(a) şi y(&) din D.
3.46. Definiţie. Fiind dată o formă diferenţială co într-un domeniu £>, dacă există o funcţie g e CP-(B) astfel încît dg = co, atunci g se numeşte primitivă a formei diferenţiale co iar co se numeşte formă diferenţială exactă în D.
Observaţii. 1) Dacă co = pda? + qdy, relaţia dg = co este'echivalentă cu
cg 8g ox oy
2) Dacă g1 este o altă primitivă pentru forma diferenţială exactă co, atunci gx = g + o, unde c este o constantă arbitrară. Evident dg = ăg1 = = co implică d(gx — g) = 0 , de unde urmează concluzia.
3) Dacă co este formă diferenţială exactă în B şi g o primitivă a sa avem
U = g(y(Z>))-g(Y(«)).
pentru orice drum y de clasă C1 din B. Dacă y este un contur de clasă r
C1 pe porţiuni, atuncii co = 0. V
r i) Dacă \ co = 0 pentru orice contur y de clasă C1 din B, atunci co
admite o primitivă pe B. în adevăr, fie g(x, y) valoarea comună a integralelor \ co pe drumurile cu punctul iniţial (x0, y0) şi punctul final (x, y)
T din B. Atunci pe orice drum cu punct iniţial {x, y) şi punct final (x -f h, y) şi deci pe drumul liniar eu aceleaşi extremităţi avem g{x + h, y) —
x + h
— 9(xi y)=\V( 5> y) d£ cu | li | # 0 şi suficient de mic pentru ca {x+h, y)^B,
obţinem 2-f h
g{x + h, y) - g(x, y) TM^J )d i

Deoarece p este continuă în D urmează că —— (x, y) = p ( « , y). dx
La fel se demonstrează că —~(x,y) = q_(x, y). Conform observaţiei 1)
observaţia 4) este demonstrată. • 5) Dacă D = C* forma diferenţială w = dzjz nu este exactă şi deci
mi are primitivă. Pentru a arăta acest lucru este suficient să arătăm că r ăz \— =£ 0, unde y = at7(0,1). In adevăr J * Y
y(j') = e2*u, t e [0,1], y'(t) = 27rie2ni( dt deci
f da T" : 27îi d i = 2ra 9? 0.
6) Se vecie că dz dx + idy x dw + y ăy , . x ăy — y da;
T i ' z x -f- i;Ţ/ a;2 + y2 ip2 + :?/2
este o formă diferenţială complexă si cum i—— = 2~i urmează J z
Y
f xdx_-rjăy _ Q g. f aŢcty J *2 + £2 ' J tf2
— i/d* 9 T T
? / 2
unde y = 5^(0; 1).
3.47. Definiţii. Se spune că o formă diferenţială « = pd# -f qd?/ definită pe c? este închisă dacă pentru orice punct z0 e tr există un disc centrat în #0, Z7 (#0; r), în care w admite o primitivă, adică « admite primitivă locală. O formă diferenţială co = pdic + qdy definită pe G se numeşte local exactă dacă dco = 0 în G, unde, prin definiţie, pentru p, q e C1(6:;?
/ <3q cp \ aco = — — j dx dy.
\ d% dy ) 3.48. Propoziţie. O formă diferenţială <x> este închisă dacă şi numai
dacă pentru orice / 0 e f f există un disc deschis U(z0; r) •=> G astfel încît i &> = 0 pentru orice y = 5(.q, z2, z3), unde z1: zz, z3 e U(zQ; r).
Rezultă din (3.46). 3.49. Propoziţie. Bacă co este de clasă C1 în G, atunci « este închisă
dacă şi n umai dacă este local exactă pe G. Dacă co este închisă, atunci din (3.46.4) rezultă că: faptul că co are
8s Ss o primitiva locală g este echivalent cu —— = p şi —-— = q în orice
dx ' dy S-c. 663 g l

d2& O, y) e l'(.î0; r), 0O e (?. Cum p şi q sînt cu derivate continue dycx
3p c-g <3q „ , . „ . 3p 3q = —— 5 ——2— — — - , co închisa este echivalenta cu —— = — - sau, in
cij cx8y 3x 8y 8x sfîrşit, cu dco —0.\J
3.50. Primitiva unei forme închise co de-a lungul drumului y : [0,l]->-6? se numeşte o funcţie f e 0[0,1] astfel încît pentru orice t0 e [0,1] există It, = (*o — ]h h + ^)J C(Y(*O) 5 r) Şi ° primitivă g a lui co în U[y(t0); r) astfel încît (g o y) (t) = î{t) pentru orice te (t0—h, t0+h) n [0,1].
3.51. Teoremă. Dacă co este o formă diferenţială închisă co ==pd« + — qăy în G şi y un drum continuu în G, atunci există o -primitivă f a formei co de-a lungul lui y care este unică pînă la o constantă aditivă.
Unicitatea primitivei formei închise co. Fie ft şi f2 două primitive. Dacă t0 s [0,1] există un disc deschis U (y (tQ); r) în care avem două primitive gi şi g2 ale lui co astfel încît (gx°y) (t) = ,f100, (g2 ° y) (2) = f2C*) pentru orice te (t0— h, t0 + h). Cum g2 — gx = c urmează f2—f2 continuă şi local constantă pe [0,1] deci constantă pe [0,1].
Existenţa primitivei i a formei închise co de-a lungul lui y. Prin definiţie fiecare punct t0 este conţinut într-un interval deschis (relativ la [0,1] ) în care există o primitivă. Deoarece [0, 1] este compact el poate fi acoperit de un număr finit de astfel de intervale deschise Ik. Aranjăm aceste intervale pe care le renumerotăm într-o ordine Iv I2, ..., In astfel încît Ik n ( U I}) ¥= 0. Prin ipoteză, avem o primitivă fft în I». In I 2 (]IU
3 = 1
f2—fx este constantă după teorema de unicitate demonstrată. Adăugind la f2 o constantă putem aranja ca f2=fi pe I 2 n Iv Atunci g2 definită prin
(J1 iîAt) dacă tel . . , . „ „ T T g.z{t) = i este o primitiva in Ix U i2 .
|f2(i) dacă t e I 2 în I 3 n (I t U I2), f3 — g2 este constantă ; adăugind lui f3 o constantă
putem face ca f3 = g2 în I3 n {I1 U I2) şi atunci g3 definită prin \sS) dacă tei nj _
go(t) = J ° - w x este o primitiva pe I, U I 2 U i3 . lf3(t) dacă i e I8
Din aproape în aproape vom ajunge că în In n (Ii U I2 U . . . U In_i) f„—g„_1este constantă. Atunci adăugind lui f„o constantă putem face ca f» = g„-i în I„ n{I1Ul2 U...Uln-i) şi atunci gn definită prin gn{t) =
fg»-i(*) dacă tel, u L u . . . uJ ,_ i . . ... ~ r n 1 n __ = J & - ' ' * x este primitiva pe L0»1]- • f,,(/) dacă te J
S ~>9 îiniţm \ co pentru un drum continuu y. Dacă y este un drum
de clasă O1 pe porţiuni, adică există sistemul de drumuri (y1; y2, . . . , y„) asociat diviziunii A = (t0, tv . . . . t„) atunci s-a definit
= s 6). fc = l t
• ' ; -
82

Dacă f este o primitivă de-a lungul lui y, avem după formula (3.46.3.)
\ « = ffe+1) - î(tk),
de unde prin adunare avem
3.53. [co = f(l) - f ( 0 ) .
Această formulă conduce la următoarea : 3.54. Definiţie. Se numeşte integrala formei diferenţiale inchise
co pe drumul continuu y diferenţa f(l) — f(0), unde f este o primitivă a formei <o de-a lungul lui y.
Se vede că integrala l oo nu depinde de alegerea primitivei f de-a lun
gul drumului y. ISToua definiţie generalizează definiţiile din (3.41) şi (3.43). 3.55. Definiţie. Fie 9 :8 X T -> G o aplicaţie continuă a unui drept
unghi [a, b] x[a ' , b'] în mulţimea deschisă G şi w o formă închisă în G. Se numeşte primitivă a formei închise w după aplicaţia 9 o funcţie f continuă în dreptunghi şi care satisface condiţia că oricare ar fi punctul (a, T) din dreptunghi există un dreptunghi -D(0jT) centrat în (<r, T) şi un disc U(®(G, z);r) c G în care g este o primitivă locală a lui « astfel ca g(<p(s, t)) = î(s, t) în orice punct (s, t) e £>(0jT).
3.56. Teoremă. Există întotdeauna o primitivă a formei închise « după aplicaţia 9 şi ea este unică pînă la o constantă aditivă.
Demonstraţie. Analog ca în demonstraţia teoremei lui Cauchy consi-derînd două diviziuni una pentru 8 — [a, b] cu punctele Sj şi alta pentru T = [a', b'} cu punctele tk, urmează
?(!>« Sj+1)] X [tk, tk+1])^Ujk^G.
unde Ujt este un disc în care există o primitivă gjk a lui w (w fiind închisă). Să fixăm k. Deoarece TJ uk n Uj+1>k nu este vidă şi este conexă se poate
adăuga fiecărei gjk o constantă astfel ca gjk şi gs+1,k să coincidă în Uiikn U}+1<k; se obţine o funcţie îk{s,t) astfel încît pentru orice j e 0, n—l să avem
f*(s, t) = gjt:{o{S,t)) dacă te [tk,tk+1].
Astfel îk{s, t) este continuă în dreptunghiul [a, b] x [tk, tk+1) şi este o primitivă a lui « după ok = 9 în dreptunghiul precedent. Fiecare funcţie îk este definită pînă la o constantă aditivă. Alegînd constante aditive astfel ca îk(s, t) = îk+1(s, t) pentru t = tk+1, atunci funcţia f definită prin
î(s, t) =îk{s, t) cînd te[tt;, tk+1],~he 0, m-±,
este o funcţie continuă care este o primitivă a formei închise « după aplicaţia 9. Unicitatea acestei primitive f după aplicaţia 9 pînă la o constantă aditivă se demonstrează ca unicitatea primitivei de-a lungul unui drum y. •
83

3.57. Teorema. Dacă yx si y2 sînt două drumuri din G omotope avem f f l w = U oricare ar fi forma închisă u> în G. Yi Y2
Demonstraţie. Fie cp : S x T-+G unde # = T = [0,1] o deformaţie continuă a drumului yx în y2 cu aceleaşi extremităţi:
Yi(0) = y2(0) = % si yx(l) = y2(l) = z%. Evident, din definiţia unei primitive după cp, avem
L = f(0,l)-f(0,0) şi L = f(l , l )-f( l ,0) . Yi Yj
f este constantă pe t = 0 şi t — 1 pentru că g(<p (s, 0)) = î{s, 0) pentru orice 6-e [0,1] şi g(cp(s, l)) = f(s, 1) pentru orice s e [0,1]. Prin urmare f(Q,0)— = f(l,0), f(0,l) = f(l,l). Deci ţ u = Cto. D iţ.-J.
Yi Ys
Ultima relaţie, dacă notăm yx u yf = y, drum închis din G, se enunţă în forma :
3.58. Dacă y este un drum închis omotop cu zero în G şi u> este o formă diferenţială închisă, atunci \ u> = 0.
De asemenea, dacă f e Jf (G) şi y este un drum în G, rezultă că î(z) ăz = î(z) ăx + <f(*) dy este formă închisă în G pentru că = i
cy dx (relaţia lui Caueliy-Kiemann), adică d<a = 0 şi w = f(z) ăz este închisă. Deci
3.59. Teorema lui Cauchy. Dacă f e 3^{G) şi y este un drum închis omotop cu zero în G, atunci \î(z)ăz — 0.
Y
3.60. Generalizarea teoremei iui Cauchy pentru disc. Dacă f e C1(2>) atunci
\ f(?) ăz = 2i u —- d# ăy şi V f(2) ăz = — 2i U — d« d#, Y fl Y -D
'«cle D = U(z0; r) şi y = SU(z0 • r).
Demonstraţie. Din definiţia derivatei formale cijoz avem —— = dz
şi î(z) ăz — uda? — 3a 8r . . ( du <5v . 1_ ! 1
dx dy \ 8y dx văy + i (vda; -f udy). Aplicînd formula lui Stokes în plan (Green),
scrisă cu ajutorul formelor diferenţiale
1 2
-St . oi -- p 1 •
d& cy _ 1
= 2
S—S* w avem
84

\uda? — vdv = \ \ I j da; ăy şi \ vda? + udg/ = \\l i da; ăy. J " JJV 5a? ^ ; J * )}\dx cy) T D v D
taimulţind relaţia a doua cu i şi adunînd obţinem
k f(0) d? = 2i U —:— da; ăy. Y B
La fel so demonstrează formula a doua în enunţ. • 3.61. Observaţie. Dacă i^J^(I)), atunci prima formulă din (3.60)
devine teorema lui Cauchy pentru cerc.
Dacă f e JP0), atunci formula a doua din (3.60) afirmă că \î{z) di — 0, Y
cînd y este SU (z0 ; r). 3.62. Generalizarea formulei integrale a lui Cauchy pentru disc.
Dacă z e D c (?, f e ( (C?) şi D = £7(0O; r), y = SZ7(»0 ; r), afwwci
f(,) = A f J C ^ _ A C C J L Q J * ^ Y D
_Lfffi5I_AffJL(0f
unde {y} = 51?. Aceste formule se numesc formulele integrale ale lui Pom-peiu pentru disc.
Demonstraţie. în baza formulelor din (3.60) avem
J £ — 0 K — 0 JJ Sz l - z Y Yi -Dr
unde £ = 5 + i i , ? — 5 — i?) şi Dr — D n K e C; | £ — «I > r) <= X> si yi = = SD'{0;r).
Trecând ia limită pentru r -> 0 şi apiicînd formula integrală a lui Cauchy în cazul s(y, z) = 1, obţinem
Y D
î n mod analog se obţine formula a doua. •
dyj
0
3.63. C«,3 particular. Dacă fe^f(X>), atunci —^ = 0 în D şi din K
prima formulă se obţine formula integrală a lai Cauchy.
85

3.64. Observaţie. Formula lui Cauchy implică teorema lui Cauejiy. Fie z G G şi z ş§ {y}, unde y este un drum închis din G. Să considerăm
funcţia f definită prin relaţia f(w) = (w — z)f(w). Aplicînd formula lui
Cauchy obţinem \ f (w) dw = V — ^ - dw = î{z) n{y, z) = 0. • 2TCÎ J 2ra. ] w - «
f i
3.65. Eeuniunea formală y = m1y1 U . . . U m«y«= LJ m^yn, unde y* s=i
sînt drumuri şi mk numere din Z, se numeşte lanţ. Dacă fiecare drum y* este în (? spunem că y este lanţ în (?. Spunem că lanţul este închis-dacă el este o reuniune finită de drumuri închise. Prin definiţie
KH1
Dacă y = [_} m,-yk este lanţ închis atunci indexul lui y cu privire la un punct i
z0 care nu este pe lanţ se defineşte ca mai înainte.
«•(rJ»o) = — T \ d - " 2-i J 0 - z0
Dacă y2 şi y2 sînt două lanţuri închise în G, atunci avem
»(Yi U y2, «o) = "(Vi, »o) + n(Y2> ~o)-
Spunem că yt este omolog cu y2 în (? şi scriem yx « y2 dacă
n(Yi) o) = n(Y2) -o) pentru fiecare z0 $ G.
Spunem că y este omolog cu O în G. şi scriem y ~ O dacă n(y, z0) = O pentru fiecare s0 0 <?.
Fig. 3.65
86

Exemplu. Fie y curba din figura (3.65) şi G\{z1,z2, zs} deschisă din C atunci y » y x + 2y2 + 2y3 şi Vf = ^f + 2 V f-f 2 ^ f pentru orice funcţie
T Ti Y2 Ya f e 3%>{G).
Dăm acum versiunea globală a teoremei lui Cauchy pentru lanţuri închise, unde drumurile închise sînt din C1 sau din C1 pe porţiuni.
3.68. Teorema lui Cauehy, Dacă y este un lanţ închis într-o mulţime deschisă G,j este omolog cu 0 în G şi fe 3f(G), atunci Vf = 0. « $ . -
Demonstraţia lui Dixon a teoremei lui Cauchy înlocuieşte consideraţiile topologice cu unele rezultate de analiză. Pentru demonstraţie sînt necesare versiunea omotopică a teoremei lui CauchjT, formula lui Cauchy pentru cerc, teorema lui Liouville, care au fost demonstrate anterior, şi observaţia (3.6-1).
Demonstraţia este dată în următoarele etape : 1) Fie funcţia g definită pe G X G prin
\{z, w) =
f(w) - f(*
w —
f'(*)
dacă w # z
dacă w=».
2) gr este continuă pe G x (7. Deoarece f £ 3^{G), este evident că g este •continuă pentru punctele z şi w diferite. Dacă z = w = 20, atunci
>'(';?, W g(*0J *o) = w
;Uf(0-f'(*o)]d!:
pentru {», w) într-o vecinătate a lui (s0, z0). Integrala poate fi luată pe segmentul [0, w]. Evaluînd membrul doi, vedem că l/w—2 se simplifică cu lungimea segmentului şi expresia de sub semnul integral tinde la 0 prin continuitatea lui f', cînd (z, w) -> (zQ, z0). Deci g este continuă.
3) g(z, w) = gr(w, z), deci funcţia g este simetrică pe 67 x G. 4) Definim funcţia h pe C astfel
h(ar) =
— : \ g(~! w) dw dacă 2 e (7, J
2^iJ : f(w! dw dacă z £ G.
5) Funcţia h e J'(C), «c?;că este întreagă. în adevăr pentru a arăta că h este olomorfă pe C este suficient să arătăm că ea este olomoifă în punctele frontierei SG şi în punctele lui {y}.
37

a) Fie z0 e BG. Atunci z0 $ {y} şi fiindcă lanţul y este închis, există un disc U(z0 ; s) astfel încît U{z0; s) n {y} = $ dar U(z0; s)ncff ^ O, adică TJ(z0; s) conţine puncte £ care nu sînt în G şi deoarece n(y, z) este continuă pentru z£ y urmează »(y, #0) = 0 şi deci că cele două integrale,, exprimînd h după cum z&G sau # ^ (r, sînt egale cu aceeaşi expresie 1 f f(w)
— r \ — d w pentru z£ TJ(z0; s). Aceasta demonstrează că h este olo-2 t i J ' I w-morfă în fiecare punct din d(?.
b) Din uniforma continuitate a lui g pe compacte din G x G urmează că h este continuă. Pentru a arăta că h este olomorfă, este suficient să demonstrăm că într-un anume disc centrat în
unde{y j 2 £ ( î
integrala * h = Ti
o.,
8T şi T este un triunghi oarecare. Dar avem pentru z $ {y}kşi
l h ( « ) c t e = — \ [g(z,w)dw &,== — [ U(w,0)ds Yj Ti T T Yi
dw —
2 - i 1 1 dw,
deoarece g este simetrică şi z i-> g(z, w)"este olomorfă, obţinem valoarea 0. Deci h este olomorfă pe C (h e jf (C)). "
6) li este mărginită în C. Să presupunem că z e Ext Z7(0, B) cu E unei V dw = f(g) \ dw = 0. Deci, dacă suficient de mare. Atunci
w w
» t G. atunci f f(w \v- dw este mărginită pentru că f(w) este mărginit
pentru w e {y} şi « este mărginită inferior de către distanţa dintre {y} (care este compactă) şi complementul mulţimii deschise G. Dacă z e G şi z este interior unui disc mare, atunci funcţia g(.s, w) este mărginită (fiind: continuă). Aceasta demonstrează că h este mărginită pe C.
7) Deoarece h e Jf (C) şi mărginită pe C, prin teorema lui Liouville 1 f f(w)
h este constantă. Din definiţia lui h prin relaţia h(z) — V — dw dacă. 2- iJw —z
z ţG, atunci urmează că h(z) -> 0 cînd z $ G şi z -> oo. Prin urmare h(») = 0 pentru orice 0 e C.
8) Acum folosind definiţia lui h pentru s £ G şi faptul că h — 0, urmează formula lui Cauchy
\ ——— dw = î(z) w(v. z), 2-r.i J W — 3
şi prin (3.64) aceasta implică teorema lui Cauchy, adică Vf = 0. •
88

C A P I T O L U L IV
ŞIRURI Şl SERII DE FUNCJ!! OLOMORFE
Rezultatele fundamentale obţinute în capitolul precedent vor fi aplicate în acest capitol la studiul comportării unor şiruri şi serii de funcţii olomorfe, cu scopul dezvăluirii proprietăţilor esenţiale ale noţiunii de funcţie oiomorfă. După ce se va arăta că mulţimea yf(G) este închisă în raport cu convergenţa uniformă pe compacte, se vor studia seriile de puteri, care vor permite definirea funcţiilor analitice. Un rezultat central va fi stabilirea echivalenţei între noţiunile de derivabUitate şi anaîiticitate pentru funcţiile complexe de o variabilă complexă, ceea ce arată că este posibilă construirea teoriei funcţiilor olomorfe pornind de la definirea lor ca funcţii dezvoltabile în serii de puteri.
Tot în acest capitol se vor introduce seriile Laurent, care voi' permite studiul comportării unei funcţii olomorfe în jurul unui punct singular izolat. în strînsă legătură cu clasificarea punctelor singulare izolate se va defini noţiunea de funcţie meromorfă.
§ 1. ŞIRURI DE FUNCJII OLOMORFE
Fie G o mulţime deschisă din C şi (f„) = (f„ ; n e N) un şir de funcţii complexe definite pe G.
4.1. Definiţie. Spunem că şirul (f„) este uniform convergent pe compacte în G către f dacă oricare ar fi compactul K c G, şirul restricţiilor ţf„|JT) este uniform convergent către î\K.
Noţiunea de convergenţă uniformă pe compacte a şirului (f„) către f, care este mai tare decît convergenţa simplă (punctuală), dar mai slabă decît convergenţa uniformă în G, înseamnă că, oricare ar fi s > 0 şi oricare ar fi compactul E c G, există un număr pozitiv n0 = «0(e, K) astfel încît
n > n0, z e K => | în{z) — î{z) | <3 s.
Conform criteriului iui Oauchy, şirul (f„) converge uniform pe compacte în G dacă şi numai dacă oricare ar fi s > 0 şi oricare ar fi compactul
89
E a G, există un n0 (s, E) > O astfel încît
n,m>n0, z e E => j £„(») — fffi(» j < s.
Deoarece, conform propoziţiei (1.37.2) orice compact E inclus în G poate fi acoperit cu un număr finit de discuri Uk, astfel încît ÎJt <= 6?, fce 1, n, rezultă că un şir de funcţii converge uniform pe compacte în G dacă şi numai dacă el converge uniform pe orice disc compact inclus în G. în cazul cînd D este un disc, convergenţa uniformă pe compacte în D este asigurată dacă şirul de funcţii converge uniform pe orice disc compact inclus în D şi concentric cu D. în adevăr, fie D = U(z0; R) şi fie E un compact inclus în D. ^Deoarece E si BD sînţ disjuncte, rezultă ă — = d(E, BD) > 0, deci U{z0; R - d)c'D şi Ea U(z0 ; R—ă).
4.2. Teoremă. Dacă funcţiile în : G-> C, » E S , sînt continue pe mulţimea deschisă G şi şirul (f„) este uniform convergent pe compacte in G către f, atunci funcţia f este continuă pe G.
Demonstraţie. Fie z0 un punct oarecare din G. Deoarece zx. este interior, există un r > 0 astfel încît E = U{z0; r) <= D. Şirul (f„) fiind uniform convergent pe i£, limita sa f va fi continuă pe E, deci şi în punctul z0. Q
Această teoremă ne arată că spaţiul ^(G) al funcţiilor continue pe G este închis în raport cu topologia definită de convergenţa uniformă pe compacte. De această proprietate se bucură şi spaţiul &{G). Pentru a arăta acest lucru, avem nevoie de următoarea :
4.3. Lema lui Weierstrass. Dacă (f„) este un şir de funcţii olomorfe pe D= U (z0; E), continue pe D, care converge uniform pe cercul 5D, atunci t
(a) (fB) converge uniform pe compacte în D, către o funcţie f. (b) f e JF{JD). (c) Oricare ar fi Ic e N, şirul (f(„fc)) converge uniform pe compacte în-
D către f**>. Demonstraţie. 1) Limita şirului (f„) pe cercul cD este o funcţie g con
tinuă pe BD. STotînd y = 8U {z0: R), funcţia f definită prin
g(0
va fi olomorfăpe D, conform lemei (3.18), şi
fc! f K(i 2-i 3 ( ^ - » ) i + 1
Y
2) Eămîne să arătăm că (fţ?) converge uniform pe compacte în i> către f(*>, pentru orice fc e N. Aplicînd lui î„ formulele lui Caucliy, avem
W 2ra 3 (r-z?^ " deci
Y
fc! |r Ina)-S(Q -fW(») _ f*(«) | = - l i . CJâ.c
Y
i + 1 dS
90

Este suficient să arătăm că şirul (flft)) converge uniform pe discul compact U(z0 ; r) oricare ar fi r < B. Fie ă = B — r şi s un număr pozitiv arbitrar. Va exista un n0 astfel încît
n> n0, ţe8B^\în(Q ~ g{Q I < * ? " " > Mii'.
de unde deducem
» > n0, z e J7(«0, r) => îf>(z) - îw(z) | < •—- = e, 2rc dk+1R1ci
ceea ce arată că £<p converge uniform către fft) pe £7(20> r)> oricare ar fi
r < 22, deci fţ*> converge uniform pe compacte în B către f(ft).n 4.4. Teorema Iui Weierstrass. Dacă şirul (f„) c?e funcţii olomorfe pe
•mulţimea deschisă G converge uniform pe compacte în G către funcţia î, atunci :
(a) f e ff{G). (b) .Şr/'iîZ (f^) converge uniform pe compacte în G către f(6>, oricare
UT fi Ti = flî. Demonstraţie. 1) Fie 20 e i> ales arbitrar. Vom arăta că f este deriva-
bilă în z0. Alegînd un R>0 astfel încît U(z0; B)<=G, cercul 8U{za; B) este un compact inclus in G pe care şirul (fj converge uniform. Aplicînd ierna (4.3), deducem că î este olomorfă în U(z0; R), deci este derivabilă in % 2) Dacă U(z0; r)_este un disc compact inclus în G, atunci se poate alege B>r astfel ca U(z0; B)<=G şi aplicînd ierna (4.3), deducem că f(ftl converge uniform pe U(z0; r), deci converge uniform pe compacte în 6-.rj
§ 2. SERI! DE PUTERI
Printr-o serie de funcţii complexe pe mulţimea deschisă 6 c C înţelegem o sumă formală.
£f„=i;f f l=fo-M1+ ... +f»+ . . . ,
•care se mai scrie
^ f„(s) = î0(z) + Uz) + ... + în{z) + ..., »=o
unde. pentru fiecare n e N, f,, : Gn -> C şi 6r„ o 6r. Sumele parţiale 8n => = i0 -f fi + • • • -f- f» sînt funcţii $„ : G -> C.
Seria J]fr„ este convergentă, uniform convergentă sau uniform convergentă pe compacte în G, după cum şirul ($„) este convergent, uniform convergent , sau uniform convergent pe compacte în G. Limita S : f î - > C a şirului (#„) se numeşte suma seriei de funcţii şi vom scrie
B=0
91

în acest caz avem, pentru orice z^G, egalitatea
S(*) = £ in{z).
Conform criteriului lui Cauchy, convergenţa uniformă a seriei de funcţii £f„ pe o mulţime E<= G înseamnă că oricare ar fi e > 0 există un no =no (£)>0> astfel încît
n > n0, peN,z&E*>\ îtt+1(z) + ... + în<,P{z) | < e.
Folosind criteriul comparaţiei pentru seriile cu termeni pozitivi., se obţine imediat următorul
4.5. Criteriu de convergenţă uniformă (Weierstrass}. Bacă există o serie convergentă de numere pozitive ^u„şi un n0 astfel încît
n > n0, 26 E =f ;f„(0) | < u„,
atunci seria ^îneste uniform convergentă pe E. Ea este şi absolut conver gentă,, co
adică pentru orice z^E seria Ş] |fK(#)| este convergentă. D n—O
în cazul cînd funcţiile în sint olomorfe înt7, aplicând teorema (4.4), deducem:
4.6. Teorema lui Weierstrass pentru serii de funcţii olomorfe. Baca seria ^î^de funcţii olomorfe în G este uniform convergentă pe compacte în G, atunci suma ei S =]£im este o funcţie olomorfă în G, iar seria Vf^ converge uniform pe compacte in G, şi are suma Slk), pentru orice k e N. D
Seriile de puteri (sau tayloriene) sînt un caz particular, dar cel mai important în teoria funcţiilor analitice, de serii de funcţii, în care pentru orice n e N, f„: C -> C se defineşte prin in{z) — an(z — z0)n, unde z0 şi an sînt numere complexe date. O serie de puteri se va serie deci sub forma
co
Yi °^Z - ZoY — «0 + «l(« — Zo) + • • • + a»iZ — «o)" 4- • • •
Se mai spune că această serie de puteri este dezvoltată în jurul lui % iar numerele an se numesc coeficienţii seriei de puteri.
Două serii de puteri J] aB(z—z0)n şi J^»(~-—~i)" se spune că sînt egale dacă z0 = zx şi an = on pentru orice n £ K.
co
4.7. Teorema lui Abel. Bacă seria de puteri V, aB(z—z0)n este converti—o
gentă, pentru z = zx ^ z0, atunci ea va fi absolut convergentă pentru orice z, care verifică inegalitatea \z — zQ\ < \zx — z0\.
Bemonstraţie. Să notăm r = \z—z0\ şi 1\ = \zx — z0.| Deoarece seria 5]a„(%—zQY este convergentă, rezultă că există un n0 astfel încît, pentru orice n > n0, să aibă loc inegalitatea \a„\r" < 1 , adică |«» |< •• Săcon-
e?

Biderăm seria Y, \an\ rn. Pentru orice n>n0 avem \an\r"<[—) • Dacă
„,.,„—mr „.....„ii,.,, comparaţiei, deducem că seria J] Ia» I fn es^e convergentă, deci seria J] an{z—z0)n este absolut convergentă, pentru orice z astfel încît \z—z0 | = = r <)\ = \zx—z0\. •
4.8. Teorema discului de convergenţă (Cauchy-Hadamard). JPte 00
(?aM sena de puteri J an{z—zQ)n şi să notăm cu B numărul definit de formula M = 0
(Zwi CaucJiy-Hadamard) 1 . •
-p - =]im\\an\, •Lv n—+co
numit raza de convergenţă a seriei. Atunci : (a) 2% discul U(z0; B) (numit disc de convergenţă) seria converge
absolut şi uniform pe compacte. (b) In C\U(z0; B) seria diverge. (e) Suma S a seriei este olomorfă în U{z0; B).
co
(d) Seria derivată J] «a,,(^—^o)""1 are raza de convergenţă B şi suma B = l
S', adică co
« = 1
Demonstraţie. 1) Să notăm i = lim / j«„ | (vezi [20]) şi r = |# — sr0| n n «—co
Deoarece y\an\rn = r Y\an\, aplicînd seriei Jj \an\"''n criteriul rădăcinii; deducem că această serie converge pentru rL < 1 şi diverge pentru rL > 1-Să presupunem c ă 2 / ^ 0 ş i I / # + o o . Pentru \z — z0\ —r < B ——,
adică rL < 1, seria ]£an(ss~~go)1t e s^ e absolut convergentă. Pentru \z—z0\ — = r > B seria de puteri este divergentă. în adevăr, dacă ar exista un
punct zu \z1—z0\> B, astfel ca seria Y a„(zx — z0)n să fie convergentă, atunci, conform teoremei (4.7), seria J] \a„ \rn ar fi convergentă pentru orice r <\z1 — z0\. Alegînd un r aşa ea J B < r < |%—«J, deducem că seria S Ia»! r" ar fi convergentă pentru un r > —» ceea ce este contradictoriu.
i Deci_ seria este absolut convergentă în U{z0; B) şi este divergentă în C\JJ(z0 ; B). Dacă L = Q, atunci rL < 1 pentru orice r, deci seria converge absolut pentru orice z e C. în acest caz JE = + oo, iar discul de convergenţă este întreg planul C. Dacă L = +oo, atunci r \ L > l pentru orice r # O, deci seria diverge pentru orice z e C\{20}. Dacă z = z0 este evident că seria converge şi are suma a0. în acest caz B = O, iar discul de convergenţă se reduce la {z0}.
2) Să arătăm că seria de puteri converge uniform pe compacte în discul U(z0 ; B). Fie Bx< B. Pentru orice z e U(z0; B±) avem [ an(z—z0)n \ <
93

< \an\B". Deoarece seria J] \an\Bl este convergentă, aplicînd criteriul (4.5), rezultă că seria de puteri converge uniform pe discul închis TJ(z0 ;B]}, oricare ar fi Bt < B. De aici rezultă că seria de puteri converge uniform pe compacte în U(z0; B).
co
3) rJotînd cu B' raza de convergenţă a seriei derivate J] najz—z0)n7
M = l CO
ea coincide cu raza de convergenţă a seriei V nan (z — z0)n = (z — CC
— z0) Yi nau{z — ZQ)'1'1, deci va fi dată de : (vezi [20]) B = l
= ImT ]f | = Hm" jfe • 1/KÎ =
n n n
lim ][n lim / | a j = lim ]f\ an | «-•CO M-K30 E
deci E ' = £ . 4) Faptul că suma seriei derivate este 8' rezultă imediat din teorema
(4.6), Deducem astfel că o serie de puteri se derivează, derivînd-o termen cu termen, suma seriei derivate fiind egală cu derivata suinei seriei. •
I a I 4.9. Observaţii. 1) Se arată uşor că dacă există limita lim -—^^— = l, »-oo j a„ |
» atunci I = L= lirnf|a„| (vezi [7], pag. 40), deci în acest caz raza de con-
w-*co
vergenţă a seriei de puteri va fi dată de
E = l im *°° ! «'n+l I
2) Derivînd termenii seriei de h ori şi aplicînd teorema (4.6), deduceai
00
S<*>(*) = ^ [«,(* - zorr] Şi S«>(»0) = k lak. B = 0
adică _ S*>(*0)
ft !
31 Discul de convergenţă U(z0; B) nu coincide în mod obligatoriu cu mulţimea ele convergenţă a seriei de puteri, deoarece teorema (4.8) nu precizează natura seriei pe cercul de convergenţă 8U {z0; B).
00 00
4) Dinclu-se două serii de puter i V ajz—z0)n şi J] &„(s — 20)B, defi-»=o «=o
nim seria sumă, respectiv seria produs a acestor două serii, prin seria depute r i 00 00
Yi (a» + K)(?—0o)*> respectiv V! cB(«—g0)», unde cB = a06„ -f %&„_! + . . . B=0 B=0
94

. . . -l- anb0. Dacă B este cea mai mică dintre razele de convergenţă ale celor două serii, iar S, respectiv T, sînt sumele lor, se verifică uşor că S{z) +
oo co
+ T(s) = y (a, + &»)(2-z0)fl Şi S(«) T(*) = 5] o,(»-«0)*i P ^ t r u orice 2 e »=0 n=0
e Î7(20; E). Dacă &0 = c şi fc„ = 0 pentru orice n e ft* atunci Tu) — c co
şi avem cS (0) = y ca»(2 — ^o)"-CO
5) /Sena geometrică V 2" are raza de convergenţă 22 = 1 şi deoarece
pentru |»| < 1, avem 1 - 0B+1 1
lim (1 + a' -f . . . + 2'") = lim ;
1 - 2 1 — deducem
1 1 — z .,-_-
= V 2", pentru orice 2 £ Z7(0 : 1).
4.10. Teorema identităţii coeficienţilor. Fie V, an(z—z0)n şi V &„(«-!J-0
— s0),,s (foită sen; f7e puteri, avînd razele de convergenţa mai mari ca r > 0 Sumele lor S, respectiv T, vor fi definite în U (z0; r). Bacă există o mulţime E a U(z0; r) astfel încît z0 e W şi S(») = T(«), pentru orice z^E, atunci cele două serii sînt egale, adică an = bn pentru orice n e X.
co
Demonstraţie. Formînd seria V (a„—bn)(z—z0)n, ea are suma S—T, »=c
care se anulează pe E. Presupunînd că cele două serii nu sînt egale, există un cei mai mic indice fc, pentru care ak^ bk. Atunci, pentru orice s e e U(z0; ?'), avem
T(«) = V (a, - &„)(s - *„)" = (* - z0)* [a* - 6» + y (< K=0 «=1
Fie (2m) un şir astfel ca 2m £ 22, 2„, # 20 şi lim zm = 20. Deoarece S(sm) = T(0,„), m-*oo
deducem P(zm) = 0. Funcţia P fiind suma unei serii de puteri în jurul lui z0 cu rază de convergenţă strict pozitivă va fi continuă în z0, deci P(*0) = = a>; — bk = lim P(zm) = 0, adică ak = bk, contrar ipotezei. Rezultă că
ffi-»CO
cele două serii sînt în mod necesar egale. •
§ 3. ANALITICITATEA FUNCŢIILOR OLOMORFE
Pentru funcţiile olomorfe pe un disc are loc următoarea teoremă de reprezentare globală prin serii de puteri.
P5

4.11. Teorema dezvoltării în serie Taylor. Bacă f este o funcţie olo-morfă pe discul D = U(z0;r), atunci există o serie de puteri unică,
C O
y an{z—#„)", cu raza de convergenţă i ? > r, astfel încît
m = s « : y Vi
pentru orice z e D. Coeficienţii seriei [numiţi coeficienţii Taylor ai funcţiei î în punctul zs) sini daţi de :
l(n\zn) 1 f f(C) %! 2~i J ( 5 - s 0 ) s + 1
Y
!{/«?(? y = §U(s 0 ; p) £* 0 < p < r. Demonstraţie. Conform formalelor lui Cauchy (3.19), avem, pent ru
orice c e 10. r\,
« ! 2m 3 (r o — » • ) ' » + i
deci integrala nu depinde de p. Fie z£ I) şi alegem p astfel încît r0 = \z—z01 < p < r. Apelînd din nou la formula lui Cauchy, avem
f(z) = - — V—- d ţ . 2~1 J Q — 2
Dar
J(5) Y
5 — 0O - (« - «0) 5 — «o i _ s — * £ - «o
— » unde f„(Q = -—— »
iar seria J ] !—— 1 este convergentă, aplicînd criteriul (4.5), deducem că co
seria de funcţii continue j j f » ( 0 este uniform convergentă pe {y} ca şi
seria : CO (ni V \ n
£ f ( 0 - ? - o ) -tt-2o)n + 1,
3d

f( r) care, conform cu (4.9.5), are suma • Integrînd termen cu termen,
obţinem :
t^-yUt) ^ - ^ ac,
de unde deducem î(z) = £ a„(2 — z0)n, unde
«=0
1 f t(C) 2™ 3 (<:-0Or+i
f(Q fW(s »!
Seria fiind convergentă în J7(.0O; r) raza ei de convergenţă va fi cel puţin egală eu r. Unicitatea acestei serii rezultă imediat din teorema (4.10).•
Din teoremele (4.8), (4.10) şi (4.11), deducem 4.12. Teoremă. Fie D = U(z0; r) şi A mulţimea tuturor şirurilor
co
(an) astfel încît seria V an(z—z0)n să fie convergentă pentru orice zeD. «=o
Există o aplicaţie unică, bijectivă şi liniară L : 3^{B) -> A, cu proprietatea oo
că dacă fe yf{D) şi L(f) = («„) atowct f(») — V «„(.? — z0)n pentru orice »=o
a t D. Coeficienţii an sînt daţi de a„ = 9—. Q n !
4.13. Definiţie. Fie G o mulţime deschisă din C şi fie f: 67 -> C. Vom spune că funcţia f este dezvoltabilă în serie tayloriană în jurul lui
00
z0e G dacă există un disc U(z0; r) <=. G, r > 0 şi o serie de puteri J] an(z—z0)n
co' n=6 convergentă în U{z0; r), astfel încît f(2)= £ aB(2—z0)", pentru 0 6 Z7(0o;r).
»=o Dacă aceasta are loc pentru orice z0e G spunem că f este analitică pe G.
4.14. Teorema analitieităţii funcţiilor olomorfe. O funcţie f definită pe mulţimea deschisă G este olomorfă pe G dacă şi numai dacă ea este analitică pe G.
Demonstraţie. 1) Fie f olomorfă pe 6? şi z0 un punct arbitrar din G. Există un r > 0 astfel încît U(z0; r) <=<?. Aplicînd teorema (4.11) pentru restricţia lui f la U(z0; r), deducem că f este dezvoltabilă în serie tayloriană în jurul lui z0. Cum ~0 este arbitrar, rezultă că f este analitică pe G.
2) Dacă f este analitică pe G, ea va fi dezvoltabilă în serie tayloriană în jurul oricărui punct z0eG şi deci coincide cu suma acestei serii pe un disc centrat în z0. Conform teoremei discului de convergenţă funcţia f va fi olomorfă în z0. Cum z0 este arbitrar, rezultă că f este olomorfă pe ( ? . •
Eemarcăm faptul că teorema (4.11) este o teoremă de reprezentare globală a unei funcţii olomorfe pe un disc, pe cînd teorema (4.14) este o teoremă de reprezentare locală a unei funcţii olomorfe pe o mulţime deschisă oarecare.
7-c. 603 9 7

4.15. Exemple. 1) Din formula seriei geometrice,
1 = £ zn, pen t ru z e £7(0 ; 1),
1 2 M=o
înlocuind 0 cu — 0, se o b ţ i n e :
= f; (-1)"«", pentru 0e £7(0 ; 1). 1 + 0 n = 0
Derivînd aceste serii, se obţ in dezvoltările,
1 oo -| 00 =* V ,^B- i , • = V ( - l ) - i « - i , a e £7(0 ; 1).
( I - 0 ) 2 £ (I + 0)2 Ă
2) Pen t ru a obţ ine dezvoltările în serie de pu te r i ale funcţiilor e% cos z, sin z ne folosim de formulele (ez)(M) = es, (cos.0)<4*> = cos0, (cos z)(ili+1} = = — sin 0 etc. şi avem
00 ^n co ~2« co £.2»+l
e* = V — , eos0=V(-l)» — , sm0=V(-l)B , ,hn\ „tT {2n)\ ,& (2n + l ) !
aceste dezvoltări avînd loc pentru orice 0 e C. Aceste formule pot servi drept definiţii ale funcţiilor respective,
urmînd atunci să se demonstreze că au loc relaţiile (2.54) şi (2.61). 3) Dacă î(z) — log (1 + z) este ramura uniformă în £7(0; 1) a lui
Log (1 + z), astfel ca f(0) = 1, se obţine dezvoltarea :
log(l +z) = y ( -1)»+ 1 — , 0e £7(0; 1). »=i n
4) Dacă x este un număr complex şi î{z) = (1 -j- zf este acea ramură uniformă în £7(0; 1) pentru care f(0) = 1, se obţine dezvoltarea,
(1 + zr = 1 + 5 «(«-D •••(«-"+!) ,», , 6 r (0; 1), »=i n !
numită formula seriei binomiale. P(s)
5) Fie f o funcţie raţională, adică f(0) = — — > unde presupunem Q(0)
că polinoaniele P şi Q sînt ireductibile peste C. Fie zk, k e 1, m, zerourile polinomului Q. Funcţia f va fi olomorfă pe domeniul D —{^{z^. . . ,zm}.
acă z0 6 D, funcţia f se dezvoltă în serie tayloriană în jurul lui zQ :
F(z) °° Q(«) »=o
98
Coeficienţii an se pot determina punind z — z0 = fe, scriind apoi
co
P(.«0 + ft) = Q( o + *) £ M" M=0
şi egalînd coeficienţii aceloraşi puteri ale lui A din cei doi membri. Pentru aflarea razei de convergenţă a seriei de mai sus se poate aplica formula lui Oauchy-Hadamard (teorema 4.8), dar aceasta duce, în general, la calcule complicate. Să observăm însă că această rază este egală cu raza discului maxim centrat în z0 şi conţinut în D, adică este egală cu distanţa de la z0 la cel mai apropiat dintre punctele zb. Deci dacă Q nu este o constantă, adică f nu se reduce la un polinom, raza de convergenţă a seriei de mai sus este totdeauna un număr finit. în particular, chiar dacă polinoamele P şi Q au coeficienţi reali, iar Q nu se anulează pe axa reală, seria
an 4- a-,x 4- . . . 4- a„x 4- . . . Q(aO
va avea un interval de convergenţă finit ] — E, R[, unde B = \ a\, a fiind rădăcina cea mai apropiată de origine a polinomului Q. Aşa se explică, de exemplu, de ce dezvoltarea
— = 1 — x2 4- a;4 — . . . 1 4
este valabilă numai în intervalul ]—1, 1[. în acest caz, ecuaţia 1 + z2 = 0 are rădăcinile i şi — i şi deci raza de convergenţă a seriei 1 — z2 4- c4 — . . . este egală cu 1.
6) Echivalenţa între derivabilitate (olomorfie) şi analiticitate nu are loc pentru funcţiile reale de variabilă reală. în acest caz, există chiar funcţii nelimitat derivabile pe o mulţime deschisă din R, dar care nu sînt analitice, adică nu se pot dezvolta în serie de puteri în jurul oricărui punct al domeniului de definiţie. Astfel funcţia f : R -* R definită prin
î(x)
i
e~^ , x>0 0 x < 0
are derivate de orice ordin în fiecare punct din R (inclusiv x — 0, unde f("'(0) = 0, pentru orice n e N), dar nu se poate dezvolta în serie de puteri înjurai originii, pentru că, în caz contrar, suma acestei serii ar fi nulă într-un interval centrat în origine, ceea ce nu este posibil.
Pentru a face mai sugestivă diferenţa esenţială dintre cazul complex şi cel real, să notăm cu. "£*((?), <g°°(G), stf'{G) clasa funcţiilor complexe cu derivate continue pînă la ordinul fceN*, nelimitat derivabile, respectiv analitice pe o mulţime deschisă Ga£ şi Cu D(G), Ck(G), G°°(G), A(G) clasa funcţiilor reale derivabile, cu derivate continue pînă la ordinul li e N*, nelimitat derivabile, respectiv analitice pe o mulţime deschisă G a R. în cazul complex avem 3V{G) = ^(G) = . . . = ^°°(6r) =«af((?), pe cînd în cazul real au loc incluziunile stricte B{G) •=> C1(G)=> ... ^Cm{G)=> A[G).
99

§4. 2ER0URILE UNEI FUNCŢII OLOMORFE. TEOREMA IDENTITĂŢII
FUNCŢIILOR OLOMORFE
4.16. Definiţie. Funcţia f fiind olomorfă pe mulţimea deschis» G c C, un punct « e f î s e numeşte zero al lui f dacă f(«) = 0. Dacă există un n e N * astfel încît i(a) = î'(a) = ...= £»-»(«) = 0 şi în){a) # 0 r atunci a se numeşte un ^ero multiplu de ordinul n al funcţiei f. Dacă n = 1,. a se numeşte un zero simplu.
4.17. Propoziţie. Bacă a este un zero multiplu de ordinul n al funcţiei le yf(G), atunci există o funcţie ge3f(G) astfel încît g(a) ^ 0 şi î{z) = = (z — a)n g(z), pentru orice z e 67.
Demonstraţie. Vom defini funcţia g pe G prin g(z) = (z—a)~n i(z), ¥n)(a) '
pentru z e 6 ? \ {a} şi g(a) = i—L~. Evident că g este olomorfă pe n\
G\{a}. Pe de altă parte, există un r > 0 , astfel încît pentru orice zetj(a :r)cG să aibă loc dezvoltarea
t(z) 4=0 fC!
a'f = (z — a)'1 lM(a) in+1la) (n D! («-«)+•
De aici rezultă că lim g(^) = lim [(«—«) " î(z)] îin)(a) g(a), ceea ce ni
arată că g este continuă în a, deci pe G. Aplicînd (3.21), rezultă că g este olomorfă pe (r.Q
Vom nota cu 4 = A (f) = {« € G; f(a) = 0} mulţimea zerourilor lui f e 2ff (G). Dacă s e ^4, este posibil ca în){a)= 0 pentru orice ne N, adică a să nu aibă un ordin de multiplicitate finit. Vom arăta că, în cazul cînd G este un domeniu, acest lucru se poate întîmpla numai cînd funcţia f este identic nulă. Mai precis avem
4.18. Teoremă. Fie B un domeniu din C, îe J^(B) şi A mulţimea zerourilor lui f. Să notăm B—{a e B ; îin)(a)= 0, n e X}. Atunci următoarele afirmaţii, sînt echivalente
(a) f = 0
(b) B n B # 0
(c) A' n B # 0
Demonstraţie. 1) Este evident că (a) implică atît (b) cit şi (c). 2) Să arătăm că (b) implică (a). Pentru aceasta vom arăta că mulţimea B este atît închisă cit şi deschisă în B. Într-adevăr, dacă aeB există U(a;r)a
OD
<= D, r > 0, astfel ca pentru orice zeU (a; r), î{z) = £ a:i(z— a)n. Deoarece K = 0
fir-ha\ an = i-i- = 0, pentru orice n e X, rezultă că î(z) = 0 pentru orice
w! •ze U(a; r), deci U(a; r) c B, ceea ce arată că a este interior, de unde deducem că B este deschisă în B. Pentru a arăta că B este închisă în B, fie aeB' n -D 100

şi (zm) un şir «le puncte din B, care are limita a. Deoarece derivatele lui f sînt continue în «., rezultă că \\val{n){zm) = i<n)(a) = 0, pentru orice n e N,
m-*oo deci ae B. Deoarece D este mulţime conexă, iar B =£ 0 , din (1.36) deducem că B = B, deci f este identic nulă. 3) Eămîne să mai arătăm că (c) implică (b). Fie a e A' n B. Pe baza continuităţii lui f rezultă f(«) = 0. Vom arăta că ae B. Dacă nu ar fi aşa, ar exista un cel mai mic ne N*, astfel ca f<n)(a)^0, adică a ar fi un zero de ordinul n al lui f. Din propoziţia (4.17) rezultă că există ge ^(B), g(«) ¥= 0, astfel ca f(«)=(«—a)n g(z), pentru ZEB. Deoarece a e J.', există un şir (««) de puncte din A, am ^ «., care are limita «. Deoarece f(ara)=0 şi am—a ^ 0, deducem g(om) = 0. Pe baza continuităţii lui g în punctul a, deducem g(«) =lim g(am) = 0, ceea ce este
m-*oo contradictoriu. Rezultă că a e B şi deci fi (1 D ^ 0 . Q
Din teorema (4.18) rezultă imediat următoarele proprietăţi importante ale funcţiilor olomorfe pe un domeniu.
4.19. Teorema zerourilor unei funcţii olomorfe. Bacă funcţia f olomorjă pe domeniul B nu este identic nulă şi a e D este un zero al lui î, atunci: (a) există un r > 0 astfel ca U(a; r) <= B şi f(z) j= 0, pentru z&TJ (a ; r); (b) a are un ordin de multiplicitate finit, deci există n e N* şi g e yf(B), g(ffi) ¥= 0, astfel încît f(») = {z—af g{z), pentru ZE D.
în adevăr, dacă afirmaţia (a) nu ar avea loc, atunci punctul a ar fi punct de acumulare de zerouri deci A' n fi ^ 0 şi conform teoremei (4.18) funcţia f ar fi identic nulă. Afirmaţia (b) rezultă imediat din propoziţia (4.17). •
Această teoremă ne spune că zerourile unei funcţii olomorfe neidentic nule pe un domeniu fi sînt puncte izolate în B. Rezultă că funcţia f are în B un număr finit sau cel mult o infinitate numărabilă de zerouri, în acest din urmă caz ele acumulîndu-se în mod obligatoriu pe frontiera lui B.
4.20. Teorema identităţii funcţiilor olomorfe. Bonă funcţii f şi g olomorfe pe un domeniu B sînt egale dacă şi numai dacă este verificată una-dintre condiţiile
(a) mulţimea {z e B ; î(z) = g(z)} are puncte de acumulare în B. (b) există un punct asB astfel încît i(n)(a)=g(n)(a) pentru orice ne N. Se aplică teorema (4.18), la funcţia f—g. • Formulele lui Cauchy ne arătau că valorile luate de o funcţie olomorfă
pe un cerc determinau univoc valorile ei în interior. Teorema (4.20) spune că este suficient să cunoaştem valorile unei funcţii olomorfe doar pe o submulţime care are cel puţin un punct de acumulare în domeniul de olo-morfie, pentru ca funcţia să fie complet determinată.
4.21. Corolar. Mulţimea ^(B) formează un domeniu de integritate, într-adevăr, dacă f, g e yf{B) şi f-g =0, iar f # 0, atunci mulţimea
A = A (f) a zerourilor lui f va fi formată din puncte izolate; pentru a-avea î(z) g(z) = 0 în fi, va trebui ca g(z) = 0 pe mulţimea B\A, care are puncte de acumulare în B, deci g = 0. Q
4.22. Principiul prelungirii olomorfe. Fie î o funcţie olomorfă pe domeniul B. Să presupunem că există un domeniu B => B şi o funcţie îe J>T(1)) astfel încît î\B = f. Atunci funcţia f, numită prelungirea olomorfă a lui î la B, este unică.
într-adevăr, dacăix e M'(B) şi fx|fi = f, atunci f^fi =î\ B şi deoarece B are puncte de acumulare în B, conform teoremei (4.20) rezultă fa = f. Q
1CH

§5. TEOREMA MAXIMULUI MODULULUI
Una dintre proprietăţile importante ale unei funcţii olomorf e neconstante pe un domeniu este aceea că nu îşi poate atinge maximul modulului într-un punct din acest domeniu. Această proprietate nu este evidentă nici măcar pentru polinoame.
4.23. Teorema maximului modulului. Dacă funcţia f este olomorfă pe un domeniu D şi există un z0 e D astfel încît \ f (z) | < j î(z0) | pentru orice se D, atunci f este o constantă în I).
Demonstraţie. Să alegem un B > 0 astfel încît U(z0 ; B) <= D. Atunci pentru orice r e ] 0, B [ avem
f(~o) = ~ — r \ ~-— d ^ l i n d e T = su(zo; >")• 2 -1 J l-zQ
T
Deoarece y(£) = 0O + re2nit, t e [0,1], calculînd integrala, obţinem
1
f(*o) = [ «Y (0) d*-o
Din ipoteză deducem 1
deci 1
f [|f(«b)l -[%(*)) l]d* = 0. o
Deoarece funcţia de sub integrală este nenegativă şi continuă, integrala nu poate fi nulă decît dacă | î{y{t))\ = |f (Î0)!Î pentru orice te [0,1]. Cum aceasta are loc pentru orice r e ] 0, B [, deducem că | f (z) | = | î(z0) j , pentru orice z e U{z0; B). Deoarece | f | este constant pe discul U(z0 ; B), conform propoziţiei (2.49), deducem că f este o constantă pe acest disc şi aplicînâ teorema (4.20), rezultă că f este o constantă pe D. •
Menţionăm că în teoremele (4.18)—(4.23) cerinţa caD să fie un domeniu este esenţială.
4.24. Corolar. Dacă f este olomorfă pe un domeniu mărginit D şi este continuă pe D, atunci
max j i(z) | = max! î(z) |.
_ Funcţia f fiind continuă pe D îşi atinge maximul într-un punct z0e D. Dacă f este constantă, j î(z0)\ este maxim în orice punct z0 e D. î n caz contrar, nu putem avea z0 e D, conform teoremei maximului modulului, deci z0e dD. •
102

4.25. Corolar. Dacă funcţia î, olomorfă pe domeniul D, nu are zerouri în D şi \î\ îşi atinge minimul într-un punct din D, atunci î este o constantă în D.
Se aplică teorema (4.23) funcţiei—> care este olomorfă pe D. •
4.26. Lema lui Sehwarz. Bacă f este o funcţie olomorfă pe discul TJ = = U(0; 1) şi verifică condiţiile f(0) = 0 şi \f{z)\ < 1, pentru orice se U, atunci \i{z)\ < \z\ oricare ar fi zeTJ şi j f'(0)| < 1. Dacă j î(z0) | = |#0 | , pentru un anumit z0e U, sau j f'(0) [ = 1, atunci, există un număr complex c,\c\ = 1, astfel încît î(z) = cz, pentru orice ze U.
î(z) Demonstraţie. 1) Vom defini funcţia g : U -> C prin g(«) = >
pentru z # 0 şi g(0) = f'(0). Funcţia g este continuă pe V şi olomorfă pe discul punctat U. Din (3.21), rezultă ge ^f(U). Fie r e ] 0, 1 [. Conform corolarului (4.24), avem | g(z) < — , pentru orice z e £7(0 : r).Făcînd pe r
r să tindă l a i , obţinem j g(«)j < 1, pentru orice z e V. De aici rezultă j f(«)|< < \z\, pentru ze U şi I f'(0)| = | g(0)| < 1. 2) Dacă există z0e U astfel încît | fOo); = |«ol> sau dacă | f'(0)| = 1, rezultă că | g| îşi atinge valoarea maximă într-un punct din U şi conform teoremei (4.23), g este o constantă c. Deoarece | g(20)l = 1 (respectiv | g(0)i = 1), deducem \c\ = 1. Din g(,~) = c se obţine l(z) = cz, pentru orice z e U. O
Această lemă are următoarea interpretare geometrică; Dacă fe-Jf(LT), f(0) = 0 şi l(U) c U, atunci f(CT(0; r))<= U{0;r), pentru orice re] 0,1 [, iar egalitatea f(Z7{0 ; r)) = 11(0 ; r), pentru un r e ] 0,1 [are loc dacă şi numai dacă î{z) — cz, unde | c| = 1 .
Lema lui Sehwarz se poate uşor generaliza în cazul cînd fe eJ?(U(z0; r)) şi | f(z)—î(z0) \ <B, pentru orice ze V(z0; r). într-adevăr, consi-derînd funcţia g(Q = —[f(#) — f (#0)]) unde z = s0--rZ, avem ge
e JP(U), g(0) = 0 şi : g(C)| < 1, pentru orice Z, e U. Din (4.26) deducem imediat
| f ( * ) - f («o ) l<—l*-*o l Şi ff'(*o)l < — • r r
cazul de egalitate avînd loc dacă şi numai dacă f este de forma f(s) = = f(s0) + e — (0 - »„), unde \c\ = 1 .
r Interpretarea geometrică a acestui rezultat este următoarea : Dacă
îe 3f(U(z0;r)) şi î{U(z0 ; r)) c Î7(f(0o); i?), atunci pentru orice rx e P r
G ]0, r | are loc incluziunea f(77(£0 ; r1))c C(f(£0); 1^), unde-— = —> ega-i? r
litat ea pentru un >\e ]0,r[ avînd loc dacă şi numai dacă f are forma de mai sus.
_4.27. Teoremă. Fie f o funcţie olomorfă neidentic nulă pe discul compact U{0; r0), verificând condiţiile f(0) = f'(0) = . . . = f - ^ O ) = 0 , n > 1.
103

Dacă pentru z0e dU (O, r0) avem
| f(0o) | = m a x \f(z)\
atunci
-of'(-o) (a) j ^ v ^ = TO f(~o)
(b) Re M ^ o ) + ± f'(*o)
«Mwîe ?» este reaZ şi m > w. Demonstraţie. 1) Dacă» 0 = foei0», 60e[0,27c[ şi notăm f (s )=E(0) e ^ ^ ,
pentru z = r0em, 6 e [0,2TC[, atunci, derivînd în raport cu 6, obţinem
4.28. - ^ L ^ e j - i - » ™ f(a) E(0)
Deoarece f nu este identic nulă, iar 60 este un punc t de maxim pentru E(6) , avem E ( 0 O ) > 0 şi E '(80) = 0, deci
*of'(*o) f(*o)
O'(80) = m,
unde m este u n număr real. Pen t ru a ară ta că w ^ «, să considerăm funcţia g :U -> C definită pr in g(0) = 0 şi
• - L : ' 3 : ' : , 0 e [7 = Î / ( 0 ; 1 ) , 0 # 0, f ( ^ ) ^ - 1
care este olomorfă pe U. Din corolarul (4.24) deducem
|g(«)|< maxi f ( g ° g ) I = 1, «l-Vi ffo)*-1 i
pentru orice « e U. Aplicînd lema lui Sehwarz, deducem [ g(z)\ < | «|, deci
f ( g f l g ) - |< igr , s e F . f(%) I
î n particular, punînd s = r, 0 < r < 1, avem
f(*o)
104

P e de a l tă par te , pu tem scrie
d / î(z0r) m = I —
dr l f(0n)
— lim j 0 o f )
f(*o)
f(v) - /(*o) (r - 1 ) f(*0)
V x -1 J 1 - r J
Deoarece m este real, deducem
f(a„r) TO = lim
r-»l 1 - Re
f(*o) 1 - ?•
l — r " ^ lim = n. r _ i 1 — ?•
2) Pent ru a demonstra inegalitatea (b), vom deriva în raport cu 6 în (4.28) si avem
rf'(ar) 1 sf"(*)
f(0)
= O"(0) - i n R"{%) / E ' ( 0 ) \ 2 -
B(0) l B(0)
Deoarece 0O este punct de maxim avem E"(0O) < 0. Punînd 0 = 0O îm formula de mai sus şi folosind (a), deducem
Im + 1 — m O"(0O) - i E(0O)
Egalînd părţi le imaginare, obţinem
•m Re M"(*o) f'(
TO E£(< E(
>0,
de unde deducem (b). Q Menţionăm că teorema (4.27), constituie în prezent u n impor t an t
instrument în studiul geometric al funcţiilor analitice.
6 6. SERII LAURENT
Printr-o serie Laurent în jurul lui , Î 0 GC înţelegem o serie de funcţii de forma
£ a.(* ~ ™o)"' = • • •
+ «o
{z — s0)n
• + an{z
4-
105
unde an sînt numere complexe, care se numesc coeficienţii seriei Laurent. Dacă «„ = 0 pentru orice n < 0, atunci seria Laurent se reduce la o serie de puteri. Mai observăm că pentru n < 0 funcţia în{z)= an{z — z0)n este olomorfă în C\{?0}, dar nu în C.
00
Seria J] a_n{z— z0y se numeşte partea principală, iar seria de puteri «=i
V an(z—zQ)n se numeşte partea tayloriană a seriei Laurent. Vom spune că B = 0
seria Laurent converge (simplu sau uniform) pe o mulţime E^C\{z0} dacă atît partea principală cît şi partea tayloriană converg (simplu sau uniform) pe E. în acest caz, dacă pentru ze E, TI(Z) este suma părţii principale, iar T(.o-) este suma părţii tayloriene, suma 8(z) a seriei Laurent va fi definită prin
oo
S(*) - £ an{z - »„)• = «(*) + T(z), z e E.
4.29. Teorema coroanei de convergenţă. Fie dată seria Laurent oo
V an{z — z0)n. Să notăm
r = lim\f\ a_n | şi — = lim^j an\. «- •OO -L& H-+00
Dacă r < B, atunci (a) în coroana circulară U(z0; r, B), numită coroană de convergenţă,
seria Laurent converge absolut şi uniform pe compacte. (b) Seria diver e în C\U(z0;r, B).
co
(c) Suma S(z) = V an(z — z0)n este o funcţie olomorfă pe
U(z0;r,B). Demonstraţie. Partea tayloriană a seriei Laurent are discul de con
vergenţă U(za; B) unde converge absolut şi uniform pe compacte, iar suma ei este o funcţie olomorfă. Partea principală se poate scrie sub forma 00 ' ]_
V flL„w", unde w = Dar aceasta este o serie de puteri avînd ^ " ^ ly ty
B = l ~ ~0
discul de convergenţă UI O ; — J» unde converge absolut şi uniform pe
compacte şi suma ei este olomorfă. Deoarece | w | < — înseamnă r
| z — z0 \ > r, rezultă că partea principală converge absolut şi uniform pe compacte în domeniul C\U(z0; r), unde suma ei este olomorfă. Intersecţia celor două domenii, în care cele două părţi ale seriei Laurent converg simultan, _este chiar coroana U(z0; r, B). Faptul că seria Laurent diverge în C\U(z0; r, B) rezultă imediat din teorema discului de convergenţă. •
Dacă B < r, atunci coroana circulară este vidă şi seria Laurent este divergentă în întreg planul C. Dacă B = r, putem avea puncte de con-
106

vergenţă numai pe cercul d V (z0; r). Mai observăm că U(z0; 0, B) = = U(z0;R), U(z0;r, +co) = £\U(z0; r) şi U(z0; 0, +00) = C\{s 0 } .
4.30. Teorema identităţii coeficienţilor seriei Laurent. Dacă două serii Laurent V an(z — z0)n şi V btt{z—x0)n în jurul lui z0 au sumele
n = — co n = —00 eg»«Ze |>e o coroană U(z0; r, 1?) CM 0 < r < J?, atunci an = &n, perdru orice » e Z .
Demonstraţie. Notînd cn= aa — bn, seria Laurent V <?.„(«—20)M, are rc~ — 00
suma nulă în ?7(.20; r, B), ca şi seria obţinută prin înmulţirea cu (z— ZQŢ""1. adică,
£ c»(» - sof-»-1 = 0, pentru z e U(z0; r, £ ) . ! — C O
r + B Fie y == 8L ( z0; —— j . Deoarece seria converge uniform pe {y}[rezult&
că o putem integra termen cu termen şi avem
'•0 l*-"-1^ = 2-icn = 0,
deci an — bn, pentru orice n e Z . • Pentru funcţiile olomorfe pe o coroană circulară are loc următoarea
teoremă de reprezentare globală prin serii Laurent. 4.31. Teorema dezvoltării în serie Laurent. Dacă funcţia f este olo-
morfă pe coroana D = U (z0; r, B), 0 < r < B, atunci notînd, pentru orice ne X,
4.32. s„ = - M t(Q (K 27TÎ 3 (? - 0 )
K + l
unde y = oT (£0 ; p). r < p < i?, seria Laurent V «„(»— ^o)" »a avea o co-n= — 00
roană (Ze convergenţă ce include pe D şi suma ei coincide cu 1, adică are loc dezvoltarea
OG
Demonstraţie. Observăm mai Întîi că în (4.32), conform cu (3.38), integrala nu depinde de p ales în intervalul ]r, B[. Fie ze D şi alegem r"' si r' astfel încît r </•"< \z—z0\<r'<B. Conform cu (3.21), funcţia g defi-
f(ţ) — f(z) nită pe D prin g(C) = - ^ — pentru £ e D\{z} şi g(.<0 =f'(«), este olo-
morfă pe D şi notînd y' = 5Z7(^0; r') şi y" = SZ7(0O; r"), din (3.38),,
107

deducem i g = V g . Deoarece z $ U{z0; r") şi z e U(z0; r'), avem
f _ ^ - = 0 S i C - i - = 2 , 3 t-z • ) s-*
= 2 î t i .
Obţinem astfel
^HT^-HT^"'^' Y Y Y
deci
f ( a ) = s J _ ( J 5 L d C _ _ L ( J S _ 4 ! Y T
Această formulă este o extindere a formulei lui Cauchy în cazul unei coroane circulare.
Calculînd prima integrală ca la punctul (4.11), obţinem
i r UD °° - — \ - l W ăţ = V «B(z - *»)», unde
2- i J , — 0 „to
4.33. fl||==-J_C f Q dr, w>0. 2- i ) ( Î : - » O ) " + J
Pentru a calcula cea de a doua integrală, vom ţine seama că pentru £e{y"} avem | £—20 ; = ?'"<r0 — \z — z0\. Deoarece
~0
folosind formula seriei geometrice, deducem că pentru L' e {•/'} seria
y f (£ )^ foi m = l \* * 0 /
frn converge uniform si are suma ——•• Integrmd termen cu termen, deducem
1 f ţ(Y\ ce 1 f ( f -, V a - l
, d C = Y — — \ f ( Q — — d - = :i j X,-z „f, 2~i j_ ( * - * „ ) "
î'„

unde
4.34. an = —i— [ ^ ăZ, n < 0.
co
Obţinem astfel dezvoltarea î{z) = V «„(#—£0)™> unde coeficienţii a„ sînt « = — 00
daţi de (4.33), pentru ra ^ 0 şi (4.34), pentru n < 0. Deoarece funcţia Zi-+î('C){'Q—zQ)-,l~1 este olomorfă pe D, rezultă că,pentru orice neZ, coeficientul a„ se poate calcula cu formula (4.32). •
Din teoremele (4.29), (4.30) şi (4.31) deducem 4.35. Teoremă. Fie B = U(z0;r,R), 0 < r<R şi fie A mulţimea
oo
•şirurilor (an ; n e Z) astfel încît seria Laurent V aM(.s — s0)" să conveargă n= —oo
pentru orice ze D. Există o aplicaţie unică, bijectivă şi liniarăL : ^(D)-* oo
-* A, c?t proprietatea că dacă L(f) = («J, atunci i(z) — ^ an(z—z0)n, n = —oo
pentru orice z e D. Coeficienţii an sînt daţi de formula (4.32). •
§7. PUNCTE SINGULARE
O problemă importantă în teoria funcţiilor analitice este studiul comportării unei funcţii olomorfe pe un domeniu în jarul unui punct aparţinînd frontierei acestui domeniu. Cazul cel mai simplu este acela cînd punctul respectiv este izolat.
4.36. Definiţie. Fiind dată o funcţie f olomorfă pe mulţimea deschisă G <= C, un punct z0 e C se numeşte punct singular izolat al funcţiei f dacă z0$G, dar există o vecinătate punctată a lui z0 inclusă în G, adică există un R> 0 astfel încît U(z0 ;R)aG.
Evident că dacă z0 este punct singular izolat, el aparţine frontierei Iu G şi G u {z0} este o mulţime deschisă, iar dacă G este un domeniu, G u {z0} este de asemenea un domeniu.
4.37. Definiţie. Punctul singular izolat #0al funcţiei fe jf(G) se zice că este eliminabil dacă f se poate prelungi olomorf în & = G u {z0}, adică dacă există fe 2^{G) astfel încît î\G=i. Punctele mulţimii de olomorf ie G împreună cu punctele singulare eîiminabile se numesc puncte regulare ale funcţiei f.
4.38. Propoziţie. Punctul singular z0 al funcţiei f e ,ff(G) este eliminaţii dacă şi numai dacă există limita finită lini i(z).
într-adevăr, dacă vom defini f(#0) = lim i(z) şi i\G = f, funcţia f va fi continuă pe G şi olomorfă pe G şi conform cu (3.21) ea va fi olomorfă pe G. •
Uneori vom nota tot cu f funcţia astfel prelungită punînd i(z0) = = lini i(z).
Propoziţia (4.38) ne spune că pentru ca o funcţie olomorfă să poată fi prelungită olomorf într-un punct singular izolat este suficient ca ea să poată fi prelungită prin continuitate in acest punct.
109

sin % 4.39. Exemple. 1) Funcţia f(«)= — este definită şi olomorfă
z pe C\{0}, iar z0 = 0 este eliminabil deoarece putem defini funcţia f în origine prin f(0) == lim = (sin z)'\z=,0 — cos 0 = 1.
z-»co 5;
Mai general, dacă f este o funcţie olomorfă pe G şi z0e G, funcţia g(is) = • ——s definită pentru z e G\{z0}, este olomorfă pe Gr\{20}
z. — z0 şi z0 este un punct singular eliminabil pentru g, deoarece putem defini g(*0) = lim f ( g ) ~ f o ) - = f > 0 ) .
2) Funcţia f(#) = — > definită şi olomorfă pe C\{0}, are în £0= 0
un punct singular neeliminabil. Observăm că în acest caz lim i(z) = oo, *-»0
deci există limită, dar nu este finită. 3) Funcţia i(z) = sin—, definită şi olomorfă pe C\{0}, are în z0=0
z un punct singular neeliminabil. Menţionăm că în acest caz nu există limita lui f în punctul z0 = 0.
Instrumentul principal pentru studiul comportării unei funcţii olo-morfe în jurul unui punct singular izolat îl constituie seria Laurent. Fie ie 3f(G) şi z0 un punct singular izolat al funţiei f şi fie R>0 astfel ca TJ(z0;R)<= G. Din teorema (4.31), rezultă eă în U(z0; E) funcţia f se dezvoltă în serie Laurent, adică
4.40. f(*)= £ au(z-z0r, zeU(z0;E) n=— co
unde
4.41. g.a = - L - C g ^ L - - dC, y = W(z0;r), 0<r<E. . \n+l -0)
Coeficientul a , •— \f(£)d£ se numeşte reziduul funcţiei f în 2-i 3
punctul 20 Şi se notează «„j = Rez(f, z0). 4.42. Propoziţie. Un punct singular izolat z0 al funcţiei feJ^(6r) este
eliminabil dacă şi numai dacă partea principală a dezvoltării în serie Laurent a funcţiei f în jurul lui z0 este mda, adică an = 0 pentru orice « < 0 .
Demonstraţie. 1) Dacă z0 este punct singular eliminabil şi f este prelungirea olomorfă a lui f la G u {z0}, atunci f are o dezvoltare tayloriană în U(z0; R)cG. Deoarece f coincide cu f în U(z0;E), din teorema (4.30) (a identităţii coeficienţilor seriei Laurent) rezultă că dezvoltarea (4.40) coincide cu dezvoltarea tayloriană a lui f, deci seria Laurent (4.40) se reduce la partea sa tayloriană. 2) Dacă seria (4.40) are numai parte taylo-
110

riană, suma acestei serii de puteri va fi olomorfă pe U(z0; R) şi egală cu f pe U(z0; R), deci f se poate prelungi olomorf în z0, adică z0 este eliminabil. D
De aici rezultă că dacă z0 este un punct regular al funcţiei f € 3>f(G), dezvoltarea Laurent a lui f într-un disc punctat centrat în z0 este o serie tayloriană.
Noţiunea de zero se poate extinde şi în cazul punctelor regulare şi anume vom înţelege prin zero al funcţiei f € «?f (6?) orice punct regular al lui f pentru care i(z0) = fim î{z) = 0. Toate proprietăţile zerourilor funcţiilor olomorfe, puse în evidenţă în paragraful 4, se păstrează şi în acest caz.
4.43. Criteriul lui Cauehy-Riemann de eliminabilitate. Un punct singular izolat z0 al unei funcţii f e J^(G) este eliminabil dacă şi numai dacă există o 'vecinătate punctată a lui z0 in care f este mărginită.
Demonstraţie. 1) Dacă z0 este punct singular eliminabil şi f este prelungirea olomorfă a lui f, alegînd un r > 0 astfel ca U(z0; r) a G, f va fi mărginită pe compactul U(z0; r), deci pe U(z0; r), unde coincide cu f. 2) Să presupunem că există un R> 0 şi M > 0 astfel ca U(z0; R)<= G şi \î(z)\ < 31, pentru orice ze U (z0 ; R). Din formula (4.41) rezultă că pentru orice re ]0, R[ şi orice S E Z au loc inegalităţile
M \aJ <
Făcînd r -> 0, rezultă că pentru orice n < 0 avem an= 0 şi conform cu (4.42) punctul z0 este eliminabil. •
4.44. Corolar. Dacă z0 este un punct singular izolat neeliminabil pentru f G ^(G), atunci există un şir (zn), zne G cu lim zn = z0, astfel încît lim i{zn) — co. • n->co
Acest corolar ne permite să dăm următoarea clasificare a punctelor singulare izolate neeliminabile.
4.45. Definiţie. Un punct singular izolat z0 al funcţiei f e 3^(G) se numeşte pol dacă există lim f (z) = oo ; el se numeşte punct singular esenţial izolat dacă f nu are limită în z0.
Dacă z0 este un pol al funcţiei f atunci f se poate prelungi în zQ definind i{z0) = oo. în acest fel funcţia f devine Coo — continuă în punctul z0 (adică continuă în topologia lui Coo).
O caracterizare mai completă a polilor este dată de următoarea 4.46. Teoremă. Dacă z0 este un punct singular izolat al funcţiei ie
e Jt(G), atunci următoarele afirmaţii sînt echivalente (a) z0 este un pol. (b) z0 este im punct regular şi anume un zero pentru
(c) JExistă un » e X * unic astfel încît într-un disc punctat centrat în zn să aibă loc dezvoltarea -o
4.47. î{z) = a~\ • + . . . - > —^A— + a0 + a±(z - zQ) + . . . (z—z0)n z — z0
111

(d) Există un ne N* unic şi o funcţie unică g e 3tf(G U { 0}) astfel încît g(»0) ¥= O şi 4.48. î(z) = (z—zQYn g(z), pentru orice z e G.
Demonstraţie. 1) (a) => (b). Deoarece lim i(z) = oo, există r > 0 astfel încît U{z0; r)c G şi | f ( # ) | > l , pentru orice ze U(z0;r). De aici rezultă că funcţia h = — este olomorfă pe U(z0; r) şi |h(»)|< 1, pentru
f orice ze U(z0;r). Conform criteriului (4.43), punctul z0 este eliminatul pentru h, deci regular; el va fi chiar un zero al lui h, deoarece lim h(z) = - 0 = h(0o).
2) (b) => (c). F ieh prelungirea olomorfă a lui—'în discul U(z0;r)cG.
Evident că li nu este identic nulă în acest disc şi deci z0 este un zero izolat al lui b, avînd un ordin de multiplicitate bine determinat ne N*. Deci există bx eX(U{zQ; r)) astfel ca \(z0) =£ 0 şi h(s) = (z — ^ " h ^ » ) , pentru orice s e J7 («0; r). Se poate alege r > 0 astfel încît hx(z) '<£ 0, pentru z e U(z0; r), deci funcţia gx = — va fi olomorfă pe U{z0; r) şi gx{z0) # 0.
bi
Deoarece b coincide cu — în U(z0; r), vom avea i(z) = (z ~ z0)"1 gx(z),
pentru orice z e U(z0; r). Funcţia gx admite o dezvoltare tayloriană în jurul lui z0, pe care o scriem sub forma gt(z) = a_„-f- a_n^1(z—z0)J
r.. ., unde a„n= giC o) ¥= 0. Rezultă că în U(z0; r) funcţia f va avea dezvoltarea (4.47). Unicitatea lui n rezultă din (4.30).
3) (c) => (d). Să definim g(z) = (z—z0)nî(z), pentru ze G şi g{z0) = = «-_„. Din (3.21) deducem că g este olomorfă pe Ga {z0}, iar i(z) = (z — — zQ)'ng{z), pentruz € (?. Unicitatea lui n si g se deduce uşor din condiţia g(~o)#«-
4) (d) => (a). Deoarece lim g(z) = g(«0) ^ 0, din (4.48) deducem lim i(z) = oo, deci s0 este un pol al lui f. • z->20
4.49. Observaţii. 1) Numărul » pus în evidenţă în teorema (4.46) se numeşte ordinul polului zQ. Tot din această teoremă deducem că z0 este un pol de ordinul n pentru f dacă şi numai dacă el este un zero de acelaşi ordin pentru—••
2) Partea principală a dezvoltării Laurent (4.47) are un număr finit de termeni, iar această proprietate caracterizează polii.
3) Dacă z0 este un punct singular esenţial izolat al lui f, atunci partea principală a seriei Laurent (4.40) are o infinitate de termeni, adică există o infinitate de coeficienţi nenuli cu indice negativ. Conform teoremei (4.46), această proprietate caracterizează punctele singulare esenţiale izolate. Deci dacă z0 este un punct singular izolat al funcţiei f, el va fi elimi-nabil, pol sau singular esenţial, după cum partea principală a seriei Laurent (4.40) este nulă, are un număr finit de termeni sau o infinitate de termeni. Este important de subliniat că în această clasificare a punctelor singulare izolate se consideră dezvoltarea Laurent într-un disc punctat centrat
112

în z0 şi nu dezvoltarea Laurent într-o coroană U(z0; r, Ii), cu 0<r<E.. 1
De exemplu, dacă î(z) = , descompunînd în fracţii sim-z(l-z)(z~2)
ple şi utilizînd seria geometrică, se deduce uşor că dezvoltarea Laurent a funcţiei f în coroana Z7(0;l, 2) este dată de
î(z) = ... H • + ... H + 1 h— + . . . H —-+ - . . , zn zz 2z 4 8 2n+2
care are partea principală formată dintr-o infinitate de termeni, deşr punctul z0 = 0 este un pol simplu al funcţiei f, care în U{0 ; 1) are dezvoltarea
f (z ) =__L._4. M-20 4 V 2 r e + 2
4.50. Propoziţie. Dacă z0 este un punct singular esenţial izolat al funcţiei ieJ^(G), atunci el este punct singular esenţial izolat sau punct de acumulare de poli pentru
într-adevăr, dacă z0 nu este punct de acumulare de zerouri ale lui f, atunci există un r > 0 astfel încît U(z0;r)c: G şi î{z) ^= 0, pentru orice ze U(z0;r). Eezultă că —este olomorfă în U(zQ;r), deci % este singular
.1 1 izolat pent ru— ; el nu poate fi eliminabil sau pol pentru — deoarece a r
f f fi eliminabil sau pol pentru f. Deci z0 este esenţial izolat pentru
f Dacă z0 este un punct de acumulare de zerouri ale lui f, atunci, deoarece aceste zerouri sînt poli pentru —? rezultă că z0 este un punct de-acumulare de poli pentru •
De exemplu, punctul z0 = 0 este un punct de acumulare de poli pentru funcţia i(z) = — > care este olomorfă pe domeniul C \
sin—•
\ \ •; Te e Z l • în adevăr, punctele zk = sînt poli simpli, care se [Jcn ; " li-
acumulează în origine. 4.51. Observaţie. Propoziţia (4.50) pune în evidenţă un nou tip de
punct singular, care nu mai este izolat, anume este punct de acumulare de-poli. Corolarul (4.43) este evident valabil şi în cazul unui astfel de punct singular.
O primă informaţie privind comportarea unei funcţii olomorfe în. jurul unui punct singular esenţial izolat este dată de
8-c. 603 H 3 ,

4.52. Teorema lui Casorati-Weierstrass. Bacă z0 este un punct singular esenţial izolat al funcţiei ie 2/f{G), atunci oricare ar fi w0e €«, există un şir (zn), zne G cu lim zn = z0, astfel încît lim i{zn) = w0.
K->00
Demonstraţie. Dacă w0 = co, concluzia teoremei rezultă din corolarul (4.44). Dacă w0e C, conform propoziţiei (4.50), punctul z0 este punct singular esenţial izolat sau punct de acumulare de poli pentru funcţia g = şi din (4.44) si (4.51), deducem că există un sir (z„), z„ e G,
f - w0 •cu lim zn = z0, astfel ca lim g(zn) = co, adică lim î(zn) = w0. D
i
De exemplu, să considerăm funcţia i{z) = ez=l- 1!» ' / • • ' •care este olomorfă pe C\{0}. Punctul z0=0 este singular esenţial izolat, deoarece parte principală a seriei Laurent în vecinătatea punctată C\{0) are o infinitate de termeni. Dacă w0 = oo, putem lua zn —— şi N n avem lim i{zn)= lim e" = co ; dacă w0 = 0, putem lua zn '= • şi
M->CO «->oo 71 avem lim i(zn) = lim e_n = 0. Dacă w0e C\{0}, ecuaţia i{z) = w0 are
n-»oo n~*co
rădăcinile zn = » care se acumulează în 0. In | w01 -f- i(arg \v0 + 2nn)
Eezultă că, oricare ar fi w0e C\{0}, funcţia f chiar ia valoarea w0 în -orice vecinătate a punctului 0. Acest rezultat este de fapt un caz particular al unei celebre teoreme, datorată lui Picară, care afirmă că în orice vecinătate a unui punct singular esenţial izolat al unei funcţii olomorfe, -această funcţie ia orice valoare finită, exceptând cel mult o singură valoare, numită valoare excepţională.
4.53. Comportarea la oo a unei fiincţii olomorfe. Fie fejf(6r) şi să presupunem că există un E > 0 astfel încît {ze C; \z\> B} c G. Vom spune în acest caz că punctul co este un punct singular izolat al lui f. Pentru a •studia comportarea funcţiei f la oo, vom considera funcţiag(^)=f I — )»
care este olomorfă pe li I 0 ; — ? deci z0=0 va fi un punct singular izolat
pentru g. Vom spune că co este eliminabil, pol de ordinul n, respectiv punct singular, esenţial izolat al funcţiei f, după cum 0 este eliminabil, pol de ordinul n, respectiv punct singular esenţial izolat al funcţiei g.
De exemplu, fie f o funcţie întreagă (adică olomorfă pe C), avînd dezvoltarea
i(z) = a0 + «i-v + • • • + aiiz" -£• • • •; z e C.
Deoarece
g(z) = f {~) = a0 + ^ + . . . + ^ + . . . , ze C\{0}, z z
•care este o dezvoltare Laurent a funcţiei g într-o vecinătate punctată a lui 0, deducem că punctul oo este eliminabil, pol de ordinul n sau esenţial
114

izolat al lui f, după cum funcţia întreagă f este o constantă, un polinom de gradul n sau nu se reduce la un polinom (în acest ultim caz funcţia f se mai numeşte transcendentă întreagă).
Este posibil ca punctul oo să fie punct de acumulare de poli. De exemplu, funcţia i(z) = atgz are polii zk = k-, Jc e Z, care se acumulează la oo.
§8. FUNCŢII MEROMORFE
4.54. Definiţie. Fie G o mulţime deschisă din C (sau CTC). Vom spune că f este o funcţie meromorfă pe G dacă există o mulţime EcG astfel încît f e 3f(G\E), iar JB este formată din puncte singulare eliminabile sau poli pentru funcţia f. Notînd cu G mulţimea punctelor regulare şi cu B mulţimea polilor din G, avem G = Gu B. _
Evident că G este o mulţime deschisă şi este un domeniu dacă G este un domeniu. Mulţimea B este formată din puncte izolate, deci are un număr finit sau o infinitate numărabilă de puncte, care nu se pot acumula în G.
Din definiţie rezultă imediat că o funcţie este meromorfă pe G dacă şi numai dacă oricare ar f i z0 e G există un disc punctat centrat în z0, inclus în G, în care funcţia se poate dezvolta într-o serie Laurent cu partea principală formată dintr-un număr finit de termeni. Această parte principală este nulă dacă şi numai dacă z0 e G. Ca şi în cazul funcţiilor olomorfe (teorema (4.14)), remarcăm caracterul local al reprezentării unei funcţii meromorfe pe o mulţime deschisă oarecare, prin serii Laurent.
Vom nota cu M{G) mulţimea funcţiilor meromorfe pe G. Dacă ie J£{G), atunci f se poate prelungi în orice punct z0eG prin i(z0) = = limf(s). Funcţia f : G -> C<» este C<x, — continuă şi f e 34?(G). Uneori se notează tot cu f funcţia astfel prelungită.
4.55. Exemple. 1) Orice funcţie olomorfă pe G este şi meromorfă, adică J^(G)^J/(G). î n acest caz B = 0 şi G = G.
2) Orice funcţie raţională este meromorfă pe Coc 3) Funcţia ctg z este meromorfă pe C, avînd polii «ft = kn, Jc e Z ;
punctul oo este punct de acumulare de poli, deci funcţia ctg nu poate fi meromorfă pe C
4) Funcţia t g — este meromorfă pe Coo\{0}, deoarece oo este un
2 punct regular, iar punctele zk = smt poli, care se acumulează (2fc+l)7U
în origine. _ 4.55. Propoziţie. Mulţimea Jt{G) este un corp comutativ. într-adevăr, dacă f, g e Jf{G), funcţia fg nu poate avea în G decît
f puncte regulare sau poli, ca şi •
O'
& 4.56. Propoziţie. O funcţie este meromorfă pe Ca> dacă şi numai dacă
ea este o funcţie raţională. 115

Demonstraţie. 1) Dacă f este raţională, ea este meromorfă pe Cco, conform cu (2.83). 2) Dacă f este meromorfă pe C», ea areun număr finit de poli, pentru că în caz contrar, ar avea un punct de acumulare de poli, •care nu ar fi nici punct regular nici pol al lui f. Să presupunem că oo este un punct regular şi fie B — {bv b2, . . ., bn} mulţimea polilor lui f. în jurul polului bk funcţia f se dezvoltă în serie Laurent î{z) = 7^(2)+ Tt.(z), unde Tzk este partea principală, iar T;, este partea tayloriană a seriei. Pentru
n funcţia g == f —- V izk punctele &ft sînt singularităţi izolate eliminabile, deoarece dezvoltarea lui g în jurul lui b,. va fi tayloriană. Deoarece punctele din Coo\-B sînt regulare pentru g, rezultă că prelungirea g a lui g la CM va
-fi olomorfăpe C (întreagă). Deoarece 00 este un punct regular, din (4.53) rezultă că g va fi o constantă, deci şi g, de unde deducem că î=g + J] -n:k
va fi o funcţie raţională. Dacă 00 este un pol al lui f, iar a un punct regular, definind li(.s) = f I — + a ] > funcţia li va fi meromorfă pe Cco iar co va fi
un punct regmlar al lui li, deci h va fi o funcţie raţională. Dar atunci î(s) — h j ) va fi tot o funcţie raţională. •
\ z — a ) Această propoziţie ne arată că dacă vrem să cuprindem o clasă de
:funcţii meromorfe mai puţin banală decît cea a funcţiilor raţionale, va trebui să apelăm la funcţii al căror domeniu de meromorfie să difere de Cco. Clasa cea mai importantă este cea a funcţiilor meromorfe pe C, care se mai
jnumesc, pe scurt, funcţii meromorfe.
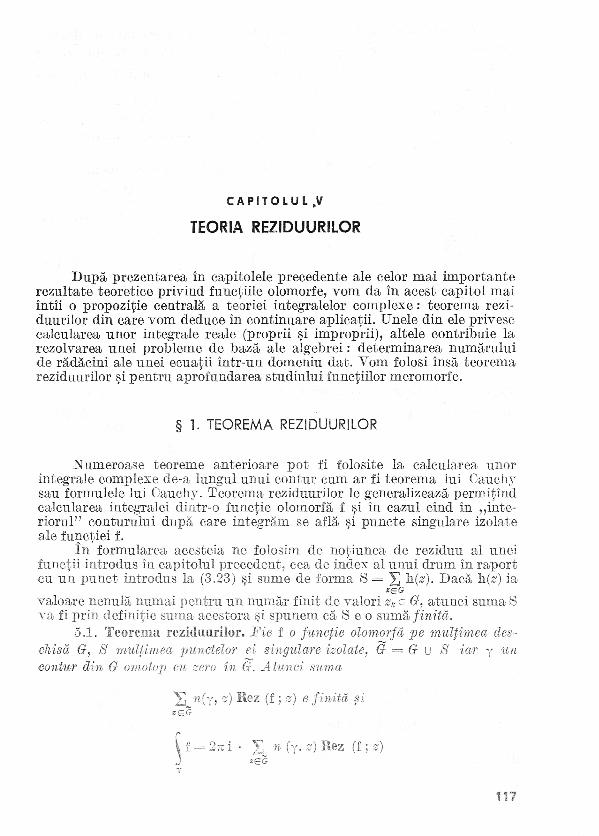
CAPITOLUL,V
TEORIA REZIDUURILOR
După prezentarea în capitolele precedente ale celor mai importante rezultate teoretice privind funcţiile olomorfe, vom da în acest capitol mai întîi o propoziţie centrală a teoriei integralelor complexe: teorema reziduurilor din care vom deduce în continuare aplicaţii. Unele din ele privesc calcularea unor integrale reale (proprii şi improprii), altele contribuie la rezolvarea unei probleme de bază ale algebrei: determinarea numărului de rădăcini ale unei ecuaţii într-un domeniu dat. Vom folosi însă teorema reziduurilor şi pentru aprofundarea studiului funcţiilor meromorfe.
§ 1. TEOREMA REZIDUURILOR
Numeroase teoreme anterioare pot fi folosite la calcularea unor integrale complexe de-a lungul unui contur cum ar fi teorema lui Cauchy sau formulele lui Cauchy. Teorema reziduurilor le generalizează permiţând calcularea integralei dintr-o funcţie olomorfă f şi în cazul cînd în „interiorul" conturului după care integrăm se află şi puncte singulare izolate ale funcţiei f.
în formularea acesteia ne folosim de noţiunea de reziduu al unei funcţii introdus în capitolul precedent, cea de index al unui drum în raport cu un punct introdus la (3.23) şi sume de forma S = $] h(z). Dacă h(z) ia valoare nenulă numai pentru un număr finit de valori zl: e G, atunci suma S va fi prin definiţie suma acestora şi spunem că S e o sumă finită.
5.1. Teorema reziduurilor. Fie î o funcţie olomorfă pe mulţimea deschisă G, S mulţimea punctelor ei singulare izolate, G = G u S iar y un contur din G omotop cu zero în G. Atunci suma
2 n(y, Z) Rez (f ; z) e finită şi
i f = 2 - i • Y, n (y. z) Rez (f ; z) J «e5
117

Demonstraţie. Fie T = [0,1], iar 9 deformarea din G a lui y în drumul constant y0. Atunci K— cp (T x T) va fi o parte compactă din (?, iar aceasta din urmă o parte deschisă din C. îfotînd s = — d(ii, C \ O), mul-
Z ţimea B = u {Z7 (0; e) : 2 e 2T} va fi mărginită deci Kx — B compactă şi K cBcK^G. Avînd o(T x T)c B, y şi y0 sînt omotope şi în B. Kx n 8 e finită, căci în caz contrar ar admite un punct de acumulare în G, contrar definiţiei lui G.
Fie D n 8 = {b}, ..., bn} şi să notăm cu nk(z) partea principală a lui »
f în bk. Funcţia g = f — y - t admite o prelungire olomorfă g2 la B şi conform teoremei lui Cauchy avem
[g= [gi= {g1 = 0,decitf==J] US y r Y0 Y Y
Trebuie să calculăm [ r.h unde -};{z) —
a\ (*) Fiţi 5.1 fi (*-hr Seria fiind uniform conver
gentă pe orice parte compactă din C\{6,i} deci şi pe {y} putem integra termen f ds 1
eu termen iar \ — = 0 pentru o r i ceTO>1 funcţia-te- ' -Y
-h}m - admitînd
primitiv; S ş i V îs - = 2ic i n(y, 6») deci V f = 2 - i JJ n(Y, 6*). Rez(f ; 64). * = i
Pentru a demonstra teorema mai trebuie să arătăm că pentru orice 20 e ( ? \ \(B n #) avem w (y, s0). Rez (f ; %) = 0.
într-adevăr, dacă pentru z0 e G\(B n £) avem Rez (f ;«„) 0, atunci 1 r d [ 1 r di:
z0 e #, decis'o $ & Şi » (Y. »O) = - r ~ \ ^ ~ = " T - \ — — = 0 c ă c x h ( g = 2TUI J U — 0O 2TCI J £—Z0
Yo
= e olomorfă în B unde y şi y0 sînt omotope. Prin urmare
f = 2T C i '£ w(y, 2).Rez(f;z)
5.2. Observaţie. Cîndy e un drum circular, triunghiular sau semicircular, (y = YJ U y2 unde yj e drumul liniar din z0 — r în »0 + r, iar y2(£) =
= z0 + ?'e1'"'), atunci 1 f = 2 - i • y_ Rez (f ; bk)unde 51; . . .,bn sînt punctele J s=i
singulare ale lui f, interioare drumului y.
118

5.3. Calcularea reziduului într-un pol. a) Dacă z0 e un pol de ordin & pentru f, atunci
Rez(f ;z0) = 1 lhn [(ps-z^mT^ (k—l)! *-*s,
într-adevăr, f(z) = 1- . . . -\ \- a0 + • • • într-o vecinătate (z — z0f z — z0
punctată a luiz0, deci [{z—z0f t(z)Jk~^ = {li—l)! a_x + li! a0(z—z0) + . . . . . . şi lim [{z~z0f ffc)]1*-1' = (fc—1)! a_x
b) Dacă 20 e un pol de ordin întîi pentru f, atunci Rez (f; zQ) = = lim (z—z0) Î(Z). Gaz particular:
dacă î(z) = - ^ - si g, heJV(G), z0eG,h(z0) = 0 si h > 0 ) ^ 0, atunci rn»
lim («-*„) f(z) = lim • ^ = - ^ - . Deci Rez (f, z0) - g(*o)
* - » « « *-»*. h(z)—b(20) b'(s'o) n ' ( 2
0 - « 0
c) î n cazul unui punct singular esenţial reziduul se poate afla numai din dezvoltarea în serie Laurent. într-un punct regular rezdiduul este 0.
d) Dacă z0 = oo e un punct singular izolat al funcţiei f, adică f este olomorfă într-o vecinătate punctată U(0; r, + oo) a lui oo, atunci f se poate dezvolta aici în serie Laurent
î{z) = ... + - ^ ş - + . . . + - ^ i - + a0 + alZ +a^ + ...
Vom defini şi aici reziduul lui f în oo şi anume în aşa fel încît teorema să rămînă valabilă, avînd în vedere că în cazul unui punct singular propriu z0e C dacă f e olomorfă în U(z0; 0, rx) şi y0 = $U(z0; r0) cu 0<ro<rv
a,tunci (vezi (5.2)) ——Vf = Rez (f, z0). Să calculăm deci şi pentru oo inte-2— i J
grala lui f de-a lungul unui drum din domeniul punctat de olomorfie, ee are faţă de oo indexul 1. Fie deci yx = 8U"(0; r2) cu r< r.2 şi y = yf şi să calculăm -— 7 Vf == — ~ \\ j ] an ln d^ = : j a„ V Cre dC, din
2— i j 2—ijl_„=_oo J 27ti,j=_oo j Y Y Y
cauza convergenţei uniforme a seriei Laurent pe {y} şi ca şi la (5.1) toţi termenii sînt nuli cu excepţia lui n '= — 1 şi din cauza orientării schimbate a lui y avem \ f = — a_x. Prin urmare vom definiRez (f ; oo) = — a_x. 2-Tri J
Y
Utilitatea acestei definiţii reiese din următoarea teoremă : 5.4. Teoremă. Fie f olomorfă în D = C\{%, z2, . . .,zn} şi notăm
«+i s«+i = oo- Atunci V Rez (f, zk) = 0.
119

Demonstraţie. Fie yt = 8U (O, rx) unde rx > max {\zx \ ....[ zn |}. Apli-cînd (5.2) avem \ f = V Rez(f, %), iar după ((5.3), d), -^— \ î =
2 n i J sTi ' 2TÎ i J
= - R e z (f, oo). Deci, £ Rez (f, «,) = 0. * = i
Importanţa practică a reziduului în oo constă în posibilitatea de a simplifica calculul unor integrale pe un contur. Dacă f e olomorfă în C \ \{ 0 i» z2i • • ••> zn)} Şi se cere să se calculeze integrala lui f de-alungul unui contur y a cărui index este 1 faţă de majoritatea punctelor singulare, de ex., zv . . . , zm, iar faţă de rest este O, atunci teorema reziduurilor vapermite
m n-hl calcularea ei dacă se determină suma J] Rez (f, zb). Dacă V Rez (f, zk) e
4=1 J=«»+l
mai uşor de calculat atunci se simplifică metoda deoarece \ f = Y
M + l
= —2- i V Rez (f, zlc) unde 0n+1 = oo. k=m-r 1
5.5. Exemple. 1) I = \ — ds unde y=SU (O: 3) se calculează J z(z2 + 4)2
conform (5.2) aşa : I = 2TC i [Rez (f, 0) + Rez (f, 2 i) + Rez (f, — 2i)] căci ~ I o
punctele singulare ale funcţiei f(0) = • sînt 0,2i, — 2i. Aceştia z(z2 + 4)
z 4- 2 sînt poli, O fiind de ordin întîi. Aplicăm (5.3) b) pentru g(z) = • ?
(s2+4)2
hlz) =0, deci Rez ff, 0) = -—— = — . în z = 2i avem un pol de ordin h'(0) 8 2 + i doi si Rez (f, 2i) = lim [(0—2i)2 î(z)]' = . Analog se calculează
*-»2< ' 32 . Rez (f, - 2i) = ~ 2 + 1 , deci I = 2^1 (— + ~2~1^±l) = 0.
32 { 8 32 J Acest rezultat se obţine mai uşor din (5.4); dezvoltînd pe i(z) în
V (0 ; 2, + 00) avem : g+2 _ g + 2r 1 V = (1 2)d JL < 1 6
z(z2 + 4)2 ~ z5 1 . A U 4 ^ ' " : 0 + 2
0 5
r 1 1
i+4 deoarece 4 . -, -n • j., •, 16 8 . 2 1 . < 1. Prin urmare, î(z) = . . . 1 1 şi
•J -S ' g S / ...i
Rez (f, 00) = 0, de unde Rez (f, 0) + Rez (f, 2i) + Rez (f, — 2i) = = — Rez (f, 00) = 0 şi I = 0.
2) îx — I02 sin—• ds se calculează dezvoltînd în jurul originii — căci 817(0,1) / l i \ 1
S{î) = {0} - pef(0). Avem : f(«r) = 02 f- . . . = . V 0 3 ! 03 /
+ 0 şi Rez (f,0) = iar I , = - — . .-> ? ? ; 3
3 ! 0 ' 3 ! 3
120
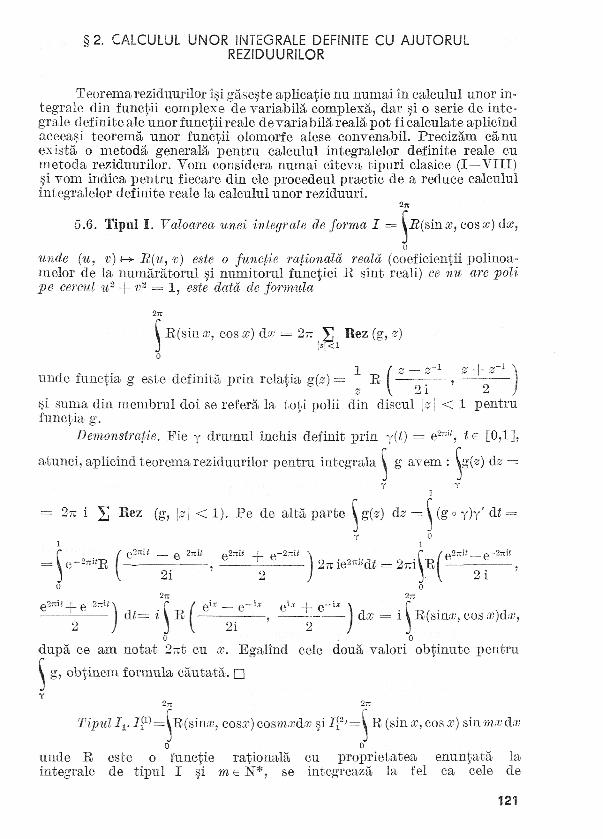
§2. CALCULUL UNOR INTEGRALE DEFINITE CU AJUTORUL REZIDUURILOR
Teorema reziduurilor îşi găseşte aplicaţie nu numai în calculul unor integrale din funcţii complexe de variabilă complexă, dar şi o serie de integrale definite ale unor funcţii reale de variabilă reală pot fi calculate aplicînd aceeaşi teoremă unor funcţii olomorfe alese convenabil. Precizăm că nu există o metodă generală pentru calculul integralelor definite reale cu metoda reziduurilor. Vom considera numai cîteva tipuri clasice (I—VIII) şi vom indica pentru fiecare din ele procedeul practic de a reduce calculul integralelor definite reale la calculul unor reziduuri.
5.6. Tip„, I. F * - » , « e i inU^e * > ™ I = $ * * , . , cos*, d. , 0
unde (ii, v) i-> E(u, v) este o funcţie raţională reală (coeficienţii polinoa-melor de la numărătorul şi numitorul funcţiei E sînt reali) ce nu are poli pe cercul u2 + v2 = 1, este dată de formula
\ E(sin x, cos x) da? = 2TC V Rez (g, z) J N<! o
1 / 0 — 0"1 0 + .s_1 \ unde funcţia g este definită prin relaţia g(z) = — E ,
z \ 2i 2 ; şi suma din membrul doi se referă la toţi polii din discul \z j < 1 pentru funcţia g.
Demonstraţie, Fie y drumul închis definit prin y{t) — e2TV'', te [0,1].
atunci, aplicînd teorema reziduurilor pentru integrala V g avem : \g(z) ăz = r Y
= 2 - i Yi R e z (g> 1*1 < !)• Ee de altă parte Vg(») dş = V (g° y)y' dt = T 0
o o 2TT 2::
da; = i \ E(sina?, cos a?)da?, ) \ [ 2i ' 2 j dX = l) o ' o
după ce am notat 2-t cu x. Egalînd cele două valori obţinute pentru s g, obţinem formula căutată. •
Tipul Iv lŞ°~\R(sm%, cosa?) cosmxdx şi-fi2-'=\ E (sin a;, cos a?) siamxdx =\E(sina?, cosa;) cosmxdx şi -?i2'=A o o
unde E este o funcţie raţională cu proprietatea enunţată la integrale de tipul I şi meif*, se integrează la fel ca cele de
121
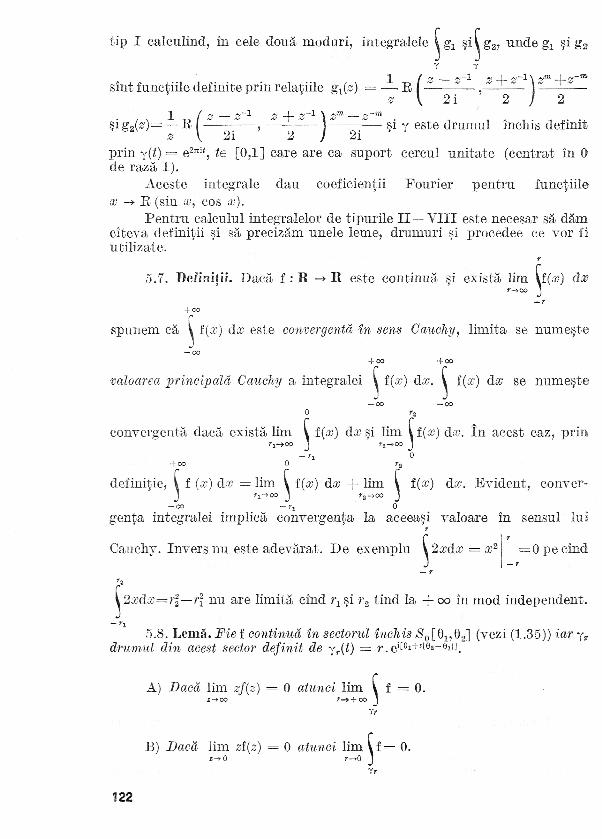
tip I calculînd, în cele două moduri, integralele \g1 şiVg2, unde gx şi g
\ / 2 £-1 £. J_ g~l\ zm
sînt funcţiile definite prin relaţiile gx{z) = —-El — — , — - — 1 — z \ 2i 2 ) £
\ f /v 0-1 z _J_ 0 - 1 \ 0OT z-m
ŞigfeC8)——U — — , j si y este drumul închis definit z \ 2i 2 / 2i
prin y(i) = e2~i(, te [0,1] care are ca suport cercul unitate (centrat în 0 de rază 1).
Aceste integrale dau coeficienţii Fourier pentru funcţiile x -*• E (sin x, cos x).
Pentru calculul integralelor de tipurile II—VIII este necesar să dăm cîteva definiţii şi să precizăm unele leme, drumuri şi procedee ce vor fi utilizate.
r
5.7. Deîiniţii. Dacă f : R -> R este continuă şi există lim \î(x) dx r->oo J
— r -f 00
spunem că \ i{x) dx este convergentă în sens Caucliy7 limita se numeşte — co
-foo f 00
• * " ' * * " Ca"chs a i n t e s r a l e t \ m ăx- \ m Ax s e n l , m e 5 t e
— co — co 0 r2
convergentă dacă există lim V î(x) dx şi lim l i{x) dx. în acest caz, prin 7^-jco J ' r2^>co J
- r , 0 + CO 0 T2
definiţie, \ f (x) dx = lim V î(x) dx + lim v î(x) dx. Evident, conver-J fi-+co J r^°° J
— co — rx 0
genţa integralei implică convergenţa la aceeaşi valoare în sensul lui 7 f
Cauchy. Invers nu este adevărat. De exemplu \2xdx = x2 = 0pecînd — T
y2xdx—r\—r\ nu are limită cînd ?\şi r2 tind la + 00 în mod independent. - ' 1
5.8. Lemă. Fie f continuă în sectorul închis -8O[61,02] (vezi (1.35)) iar y» drumul din acest sector definit de yr(t) = r.ei[ei+ile2~ei^.
A) Dacă lim zf(z) = 0 atunci lim l f = 0. f-> + co J
Tr
B) Dacă lim zt(z) = 0 atunci lim \f = 0. !-»0 r-»0 J
Yr
122

C) Bacă 9a = O, 62 = — şi lim z1^ î(z) = O atunci
l im i r^+co J
f(^) e ^ d ă ; = 0.
D) Dacă f este olormrfă în sectorul Sg [ Q D ^ X X W ' ; 1'ar z=® esie
un pol simplupentru î, atunci limVf = (0, — 0x)iRez (f, 0). r_*0J
~'r lf !
A) şi B) rezultă din inegalitatea \ f j <,31(r)-r (62 — 0X) unde
i¥(r) = sup {jf (yr (*)) 15 ^ e[0, l]}- In condiţiile de la O) avem y'r (r) =
« «— >> i . * = r i — e p si prin substituţia t ->• — £ obţinem I \ f(#) e12 d«
Yr
< \ f(r
eii) &irP^ospt+ismpt) ireij d ; ^ L |f(re") |e-^ s i l 1^ rd£ < rJf (r) \ e-^ s i n^ d*=
r f A sin o 2 = 2 i f ( r ) \ e ,Psm*'do. Cum 1 > > cînd <pe
3> J ' ? ~ 0
m/2 Tt/2
r r 2 _ „rî1 ! o _ \ e r'"m* do ^ 1*5 ' d o = ^ e ~ i _«=, ^ , de< 0 0 ~2
-3I(r) n . ,
.°'T , urmează
311 \ f(0j e** CLS : =s, J i
Yr
r>! . 2 > - l
Pentru demonstrarea lemei D) scriem dezvoltarea Laurent în jurul Ini z = 0 care este, în ipotezele date, î{z) = a_i/#+a0 + %2 — . . . 4- «„«"-f + . . . Deoarece\sn d? -> 0 cînd r -> 0 pentru n e X* urmează
S£='M lim \ f = ffl-i\— - = Bez (f, 0) i (02
-o 1 '• z
Observaţie. Lemele A—D rămîn valabile dacă se face o translaţie a originii într-un punct oarecare al planului complex. Binecunoscuta lemă a lui J or dan se obţine din lema 0) cînd luăm p — 1.
5.9. Drumurile închise ji> Y2> Y3> Yu Yo> Yej folosite pentru calculul integralelor de tipurile II—VIII au suporturile din figurile 5. 9.
Aceste drumuri au descompuneri evidente : de exemplu : drumul yx
definit prin yx(t) = -r + 4rt dacă * e [0,1/2], re2™!*-1/2!dacă te [1/2,1]
123
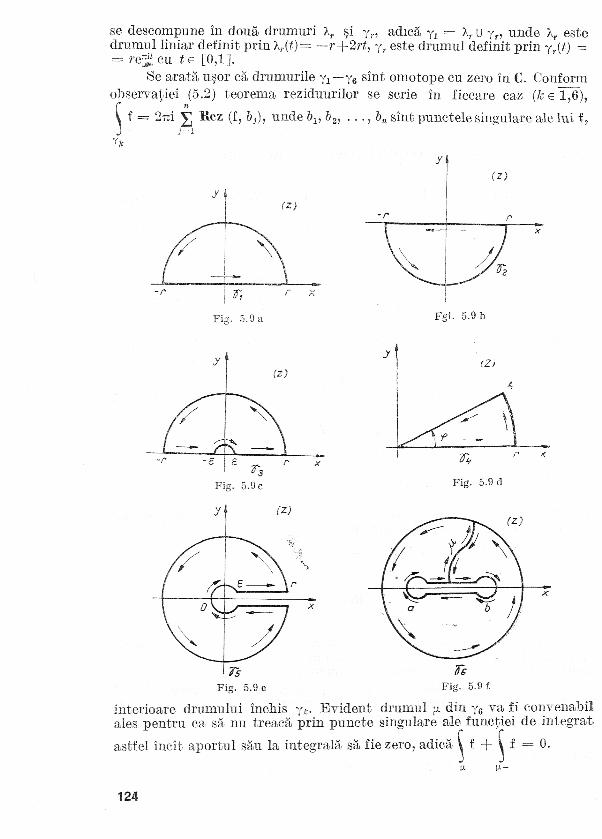
se descompune în două drumuri Xr şi yr, adică y1 = Xr u yr, unde Xr este dramul liniar definit prin Xr(2)= — r+2rf, yr este drumul definit prin yr(t) — = re™f cu i e [0.1].
Se arată uşor că drumurile yx—y6 sînt omotope cu zero în C. Conform observaţiei (5.2) teorema reziduurilor se scrie în fiecare caz (k e 1,6), r « V f = 2TÎÎ 5] Rez (f, fe;), unde bv ba, . . .,bn sînt punctele singulare ale lui f,
i -r
y .
rr
U)
\ \ \ l i „ / X
Fiiî. 5.9 a Fsi . 5.9 b
interioare drumului închis y*. Evident dramul ;J. din y6 va fi convenabil ales pentru ca să nu treacă prin puncte singulare ale funcţiei de integrat astfel încît aportul său la integrală să fie zero, adică { f + \ f — 0.
•j. i i -
124

5.10. Procedeul general de calcul al integralelor reale de tipurile -foo
II —VIII. După ce se cercetează convergenţa integralelor \ i(x) dx,
b
V î(x)dx, \ î(x) dx etc. printr-un criteriu care diferă de la un tip de inte-
o grale la altul, se parcurg următoarele patru etape :
1) Se alege funcţia de integrat şi se află punctele ei singulare; 2) Se alege un contur de integrare şi se calculează reziduurile relative
la punctele singulare interioare conturului "ales; 3) Se aplică teorema reziduurilor pentru conturul ales, descompus
convenabil în drumuri mai simple în care să figureze drumuri pentru care să se poată aplica una din lemele A—D,
4) Se trece la limită pentru r -* oo şi eventual si pentru e -r> 0. Astfel se obţin rezultatele generale pentru calculul integralelor considerate, adică calculul lor se reduce la calculul unor reziduuri, care numai în cazul unei funcţii date se pot calcula.
5.11. Tipul II. Dacă R este o funcţie raţională reală R = p/g, unde p şi q sînt polinoame de grad n respectiv m, q nu are zerouri pe axa reală şi
+ 0 0
lim : E (z) = 0 (n < m - 2), atunci \ B (x) dx = 2-i £ Rez (E, z) 2), atunci \ E (x) dx = 2-i £ Rez (E, J 8B*>0
(factorul lui 27U din membrul doi se citeşte „suma reziduurilor funcţiei B referitoare la toţi polii din semiplanul superior").
Demonstraţie. Se consideră funcţia g definită prin g(z) = E(s) şi conturul de integrare YI din (5.9) luînd r suficient de mare ca toţi polii funcţiei E din semiplanul superior să intre în interiorul conturului yv Se aplică teorema reziduurilor descompunînd Yj cum este dat în (5.9) şi atunci
( g = [ B(x) dx + [ H(z) dz = 2rd J Rez (E, z). J J J lm:>0 Ti - r Yr
r + c o
Trecînd la limită pentru r''-4. op, \ -* \ B.{x) dx (pentru că integrala con-—t —00
verge în sensul general prin criteriul în a) şi l E(«) dx -^ 0 prin lema A) se Y r
obţine rezultatul enunţat. D Observaţie. Dacă în condiţiile impuse, alegem drumul y2 din (5.9)
obţinem
[ B(«) d,r = -2TC| 5} Rez (E, o), — eo
Integrala se calculează prin una din cele două formule care permite un calcul mai rapid al reziduurilor din membrul doi.
125
5.12, Tipul III. Bacă E este o funcţie raţională reală de forma p/q, mnde p şi q sînt polinoame, q nu are zerouri pe axa reală şi lim E (x) = O
(n<m — 1) atunci i \ E(o?) e'* da; converge şi V E(x) eix dx = 2-rri J] Rez (g, #), J ' J lmz>0
— CO — OO
M«5e # este definită prin g(z) = E(^)eis. Demonstraţie, Pentru c, TJ > 0
V B(#) e"da; = \ Ti(x) cosa? da? + i \ E (x) şina? da;. 5 5 E
Aplicînd teorema a doua a mediei (forma lui Weierstrass) din calculul integral (pentru £, vj suficient de mari, pentru ca E să fie monotonă în intervalul [c, vj]) integralelor reale din membrul al doilea) există \v c2 e jc , Y)[ astfel încît
VB(a?) ex ăx = E(£)V cos^da? + E (vm cosa'dt
;.
i [ E(?) \ sina;da? + E (?)) \ sina?da;
E E2
Integralele din membrul al doilea sînt mărginite în modul de 2. în adevăr, pentru prima integrală avem
Si 5! ( E ,
cosaxlr = şina; = sine,: — sine şi deci IV cosa;dajj < 2. I E ' 5
La fel se verifică rezultatul enunţat pentru celelalte integrale. Pe de altă parte, B(£), B(Y]) tind monoton la zero pentru Ş, vj -» oo. Eezultă că 00 O
{ B(x) e" dx converge. La fel se arată că V E(a;) eix dx converge şi, prin U — co
- o o
urmare \ E(:r) eir da? este convergentă. Pentru calculul acestei integrale se
utilizează funcţia g dată în enunţ, se aplică teorema reziduurilor descompunând ji m cele două drumuri indicate în (5.9) şi se trece la limită pentru r->oo, aplicîndu-se lema C (cazul n = l ) . Astfel se obţin proprietăţile din enunţ. •
Pentru calculul integralelor \ B(a?) e~iv dx se procedează analog '
folosind conturul y2 din 5.9.
126

Observaţie. Dacă E(0) = p(«)/«q («), unde q nu are zerouri pe axa,
reală şi Km H(z) = 0, atunci M-*°°
1 p(0)
p(<r) . p( — .*) . "1 da; — • e • _ i i L e - « i 2 0») q(—*) ]
i ' - i + J] Rez (E, ) 2 q(0) ii£>o
Demonstraţie. Se consideră funcţia g definită pring(«) = p(») eu/q(«)r drumul y3 din (5.9) şi se aplică teorema reziduurilor cu descompunerea. evidentă a lui y3. Avem
— E
f f r\(x) . da; f pte) . da-J J q(«) x J q(») »
T 3 - ' 1'E
= 27ti Yi R e z (g, *)• I m s > 0
7
_ C P(*) eu ăx
J q(») * h f P(*) e i , d
J cl(^) 2
Integrala a doua tinde la zero prin lema B), integrala a patra tinde la ~i Rez (g, 0) = ni p(0)/q(0) prin lema D). Scnimbînd x în —x în integrala întîia şi trecînd la limită pentru £-» 0 şi r -> oo, obţinem rezultatul enunţat. •
Consecinţă. Dacă în plus, polinoamele p şi q din observaţie sînt funcţii de x2 şi p(a?2)/q(a;2) = 1 obţinem valoarea integralei lui Poisson
co
f şina; J x o
da;
Generalizare. Dacă f este meromorfă pe C, are un număr finit de poli care nu sînt pe axa reală, există o constantă K aşa ca \î(z)\ < K\z\ pentru toate numerele z cu \z\ suficient de mare şi a > 0, atunci
î(x) eax ăx = 2-i Yi R e z (g> l m s > 0
Demonstraţia se face ca la primul tip I I I , unde g este definită prin g(z) = =î(z) eiaz şi se ia conturul y2 din (5.9). Integralele din membrul întîi se numesc transformări Fourier. Procedeul general folosit dă evaluările lor.
oo co
5.13. Tipul IV. Integralele lui Fresnel: \ cos x2 da;=Vsinx2 dx =— / "OL. o o
Să considerăm funcţia g : z ->• ei;2 care este în Jf(C) şi să alegem con-r
turul y4 din (5.9) cu ? = — . Atunci V eilS dx + l eua ds + l e1*2 d* = 0.,
12.?

"Deoarece i g -> 0 cînd r -» oo prin lema C) pentru J) = 2 şi drumul liniar
X,. cu punctele %şi«3 egale cu J. şi 0 este definit prin Xr(tf) = —te 4 , făcînd 4 -» oo, obţinem o
oo oo oo
[ e»2 da; = C e-'2 e T d « = L^ (1 + i) C e-«' d*. 0 0 0
oo oo
\ e~*'da; = L şi urmează V i După cum se ştie \ e~*' da; = ----- şi urmează V (cos x2 + i sin x2) dx o o
1/2 1/TT — - jr- (1 + i) "V> ceea ce dă, prin egalarea porţilor reale şi a celor imagi-nare, rezultatul enunţat. •
Aplicînd acelaşi procedeu se pot calcula integrale reale aplicînd teorema reziduurilor funcţiilor z -» B(#) e'2, unde E este funcţie raţională reală cu w—TO < p—2,y=y4 cu o = • si alte condiţii evidente.
2p Pentru o aplicaţie multivocă F : C -> 0* (C), teorema reziduurilor se
.aplică oricărei ramuri uniforme ale acestei aplicaţii F , pentru orice contur închis y în care funcţia multiformă F este funcţie uniformă şi nu are în interiorul acestui contur decît poli sau puncte singulare esenţiale izolate.
Ca aplicaţii dăm procedee de calcul pentru integralele de tipurile V - V I I I .
5.14. Tipul V. Dacă E este o funcţie raţională reală de forma p/q, unde p şi q sini polinoame, q nu are zerouri pe semiaxa reală şi
oo oo
lim zH(z) — 0 (n < m—2), atunci \H(x) dx converge şi\ H(x)dx
= — "Jj ^ e z fe) z)t unde g este funcţia g(z) = log z. *ec* ' ' q(^) Convergenţa integralei este asigurată cu condiţia W<TO—2. Alegînd
Ys din (5.9) cu r suficient de mare şi e suficient de mic şi parcurgînd primele trei etape de calcul din (5.10) obţinem
r s f V{X) log x dx +[ 2&- log z dz + [VW- [log x+2rd] dx -3 q(«) 3 q(-) j i^) £ y, r
_ C JEM. log. ds = [ -2M. log s(L~= 2;ri £ Rez(g, *). J q(,«) 3 <!(*) z6C* • 3 r
71-f"
Deoarece \zg (~),\v< /• (log y + 9)-»0 cînd r -> oo, urmează că
>0 cînd r -» oo prin lema A.
128

Deoarece Jeg («)l-re< sM3 flog s -j- 0] ->0 cînd s -» 0, urmează că
v -> 0 pentru £ -> 0 prin lema B).
Aplicînd etapa a patra a calculului unei integrale, menţionată în (5.10) şi simplificînd prin 27ri obţinem rezultatul din enunţ pentru ramura aplicaţiei multivoce (funcţiei multiforme) Log dată de log z — log \ă\ + + iO cu 6 e [0,2TC]. D
h
Observaţie importantă. Calculul integralelor \ —— ăx, unde q nu 3 q.(a') a
are zerouri pe intervalul [a, b] se reduce la calculul integralelor de tipul V prin schimbarea de variabilă dată de funcţia omografică * = (bt + a)f{t + 1).
co
5.15. Tipul VI. Calculul integralelor de forma \ E(as) log x dx cu o
condiţiile ca n<m—2 (lim z ~R(z) = 0) şi E o funcţie raţională reală fără \z\—»co
poli pe semiaxa reală pozitivă. Condiţia n^m—2 asigură convergenţa integralei. Se alege funcţia g
definită prin g(z) = E(.«) (log z)- şi dramul y5 din (5.9). Integralele l şi
V tind la zero cînd r tinde către co şi s către 0 din lemele A) şi B). Cînd
argumentul lui z este 27r, avem log 2 = log Js;) -j-2-n:i. Se obţine
CO 0 0
[ li{x) (log xŢ- dx — C E(JB) [log 0 + 2m)2 da;=27ti £ Rez (g, z)
o o
sau separînd partea reală de cea imaginară avem egalităţile :
H(x) log x ăx — Re [$] Rez (g, «)] şi J _ ^ F (I
5 o
E(«) da = - ~ Im [ £ Rez (g, *)], D 2rc *ec*
5.16. Tipul VII. Să considerăm integralele de forma I = V' d.r, 3 x* o
unde ae] 0,1 [şi E este o funcţie raţională reală p/q, p şi q polinoame cu n^m—1 (lim E(s) = 0) şi q nu are zerouri pe seamiaxa reală pozitivă.
9-c . 603 129
Luînd g definită pe C* prin g (z) = R(z)jz*, conturul de integrare y5 din (5.9) descompus convenabil şi aplicînd teorema reziduurilor, avem f E(s) , f B(«) , f B(«) . , ,, , ., 'f B(x) , \ — — de = \ — ^ - d s — V —K-± ds + (1 — e-2am \ — — dr/' = Ts Y , Ys e
= 27ti Yi R e z (»> «) deoarece, cînd argumentul lui z este egal cu 2- z1 —
= e20"" A'a. Cum V şi \ -» 0 cînd r -> oo şi s -* 0 prin lemele A) şi B), r, YS
urmează (l — e-2*™) I — 2m J] Rez (g, z), sau I = — Y Rez (g,s). 2ec* sin an sec*
Propoziţie. Dacă a$Z, i este olomorfă pe C eu excepţia unui număr finit de poli care nu se află pe axa reală pozitivă, atunci
[ î{x)x* _^£ = ?^!L 2 Rez (g, z), J a? sin an *ec* o
•ww e g este definită prin g(z) = / (« )«° - 1 . Demonstraţia seda ca la tipul VII. Integralele de acest tip se numesc transformări Mellin privite ca funcţii de a : se notează Ml în punctul « e C \ Z .
în rest dăm unele informaţii referitoare la integralele de tipul V I I : 00
T(z) = V e~* t* definită pe semiplanul drept defineşte o transformare o
Mellin. Scriem ătjt din cauză că această expresie este invariantă la „translaţii multiplicative", adică pentru orice funcţie care este absolut inte-
f ăt grabilă pentru te]0, 00 [ şi a un număr pozitiv, avem V î(at)—- =
o 00
= \ £(<) — . înlocuind t cu nt în formula care defineşte funcţia T cu J * o
n e N*, obţinem 1 /"• Ti
— = \ &-"' ts — pentru Re(s) > 0. n* J t w
o Sumînd după n obţinem în membrul întîi funcţia zeta a lui Riemann de variabile complexă s.
în legătură cu aceleaşi integrale improprii dăm următoarea : Definiţie. Dacă f este continuă pe [0, 00 [, există constantele A şi B
astfel încît \î(t) | < Aem pentru toţi t suficient de mari, atunci Lf (z) = 00
= V î(t) &-£ ăt este olomorfă într-un serniplan Rez > a. {ini a ; Lf (z) con-oj
verge} = <?0 se numeşte abscisa de convergenţă a integralei şi Li este olomorfă pe Rez > 50 şi integrala converge absolut pe Rez > a0 + e pentru orice s > 0. Funcţia Li se numeşte transformata Laplace a funcţiei f.
130

5.17. Tipul VIII. Să considerăm integrala I — p(a?) da; q(x) {x—af{b—xf
a unde p si q sînt polinoame, q nu are zerouri pe segmentul [a, 6], a, P > 0 cu a + (3 = 1.
Procedînd ca în cazul precedent, alegînd funcţia g definită pe C \ \[a, b] prin g{z) = ~R{z)l{z—a)rx(b—zf, conturul de integrare y6 din (5.9) descompus convenabil, cum \ = — V şi V j i şi V -> 0 prin lemele B)
şi A), ţinînd cont că ramura funcţiei se schimbă cînd se înconjoară unul din punctele a sau b şi procedînd ca la tipul precedent avem rezultatul final :
I = TZ e" ( £ Eez (g, z). D sin a7t 2ee{«,&}
5.18. Alte aplicaţii ale teoremei rezidmmlor. 1 f eis*
1) Să se calculeze —— lim V dz, unde yr = yx u y2 U y3 cu y! 2r '-«o J 2
(0
• r + 1 (r - 1 ) , y2(/) = 6W+»)», y3(<) = 1 + * (r - 1), «e [0,1] şi se R. Soluţie. Suportul drumului yr are forma din figura (5.18.1). Pentru
n f 1 A l' ăx , f • eU'+1) A* , f ăx C d ^ , • f A* . 0 V —• ds = \ f V i- ăt + \ = \ + 1 n \ dt +
} z J x J e'^+'i J a? J a; J Y, -r - l 1 > 0
,.'f CLB . . 1 .. f dz + \ = m şi lim \ J X 2nî r-*oo J z
Pentru a calcula limita din enunţ pentru s > 0, compunem drumul yr cu yf definit de yr(ţ) = re"", te [0,1]. Drumul y = yr u ~yr este un drum închis cu suportul { y}. Aplicînd teorema reziduurilor şi observînd că Rez (g,0) =
2 Yr
+
— 1 obtmem V — L 1 l - = o J z
\
dz
2TZÎ ultima integrală,
conform lemei O), tinde la zero cînd r 1 f eiM
tinde la infinit şi deci — lim V — dz=l 2KÎ r-tx, J Z
Fig. 5.18.1
pentru s > 0. Ca şi la integralele de tipul I I I pentru s < 0 trebuie să compu
nem y~ cu yr definit de yr{t) = re'1'-1-')71 pe t e [0,1]. Deoarece funcţia eis*lz nu
131
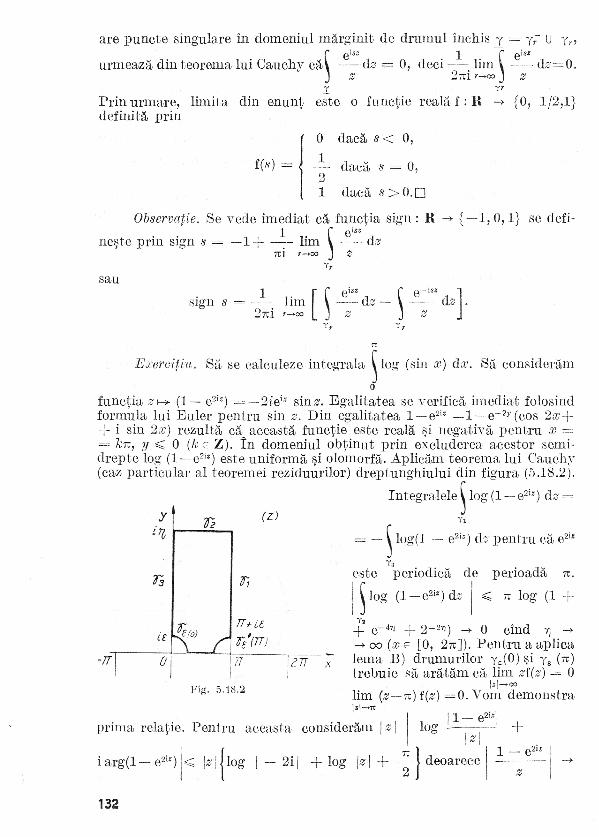
are puncte singulare în domeniul mărginit de drumul închis y = yr u y r, f e'S3 1 T eiss
urmează din teorema lui Cauchy că \ dz = 0, deci lim \ ăz—Q. J Z 2TCÎ r—oo J z r v
Prin urmare, limita din enunţ este o funcţie reală f: I i -* {O, 1/2,1} definită prin
m O dacă s < O, 1
dacă s = O,
1 dacă 5 > 0 . D
Observaţie. Se vede imediat că funcţia sign : R -* {—1,0,1} se defi
neşte prin sign s = — 1-TCl r-K»
u.ou.i<*u ucu j .Luiuyia j
—— lim V dz Tei r->co J 0
sau
sign s — lim 2TC1 '—oo
e,s (b tb
Exerciţiu. Să se calculeze integrala V log (sin a?) d,r. Să considerăm
funcţia zi-> (1— e2b) = — 2i'eiz sin«. Egali tatea se verifică imediat folosind formula lui Euler pentru sin z. Din egalitatea 1 —e2'2 = 1 —e~Zy(eos 2x+ -j- i sin 2x) rezultă că^ această funcţie este reală şi negativă pentru x = — Ten, y < O (ke Z). î n domeniul obţinut prin excluderea acestor semi-drepte log (1 —e2il) este uniformă şi olomorfă. Aplicăm teorema lui Cauchy (caz part icular al teoremei reziduurilor) dreptunghiului din figura (5.18.2).
Integralele V log (1 — e2iî) dz =
Ti
g(l — c2L:) dz pentru că e2i*
este periodică de jierioadă n.
[log (l-e2iz) d.c •x log (1 +
Yj
+ a~4y> + 2-2Ti) -> O cînd 7) -> -» oo (a? G [O, 2TC]). Pen t ru a aplica
^ lema B) drumurilor yf(0) şi yE (TC) trebuie să a ră tăm că lim zî(z) = O
j z j—*co lim (Z-TZ)Î(Z) =O.Vom demonstra
prima relaţie. Pentru aceasta considerăm \z\ 11 — e 2 k '
g I . 1 -f-1*1
i a r g ( l — e 2 i 2 ) | < MJlog | — 2 i | + log \z\ -\—— [deoarece 1 - e 2
132

-»j(l — e2is)z=o| = 2ie2is | ,_0= 2. Evident pentru a demonstra că \z \ \î{z) j ~> 0 cmd e-> 0 trebuie să arătăm că s log e -> 0 cînd s-> 0. Aplicînd regula lui l'Hopital pentru log e /— avem lim s log s = lim — =lim(— s) = 0,
£ e—0 s->0 — l / s 2 S—0
în acelaşi fel se aplică lema B) pentru Ys(n). Trecînd la limită pentru 0 şi i) -> oo, obţinem
log ( - 2ie" sin x) dx = 0.
Dacă alegem log e'r = ix, partea imaginară se află între 0 şi n. Deci pentru a obţine ramura principală cu o parte imaginară între — TU şi n, trebuie să alegem log ( — i) = — i. Ecuaţia poate fi scrisă în forma
i) dx + \ i xdx -j- \ log sin x dx = 0 sau V log 2 dx + { log (— i) dx + V i xăx -j-1 0 0 0 0
XC
K re3 r 7t log 2 i. 7t + i — -f- \ log sin x dx = 0. De aici urmează
2 2 j o
r. 2rt
v log sin a; da; = — TC log 2. De asemenea avem \ log sin3 2a; da; — o o
n/2 TI
= 4 \ log sin2 2a; d.c = 4\ log sin « dx = —4TC log î o o 3) Aplicaţia teoremei reziduurilor la sumarea unor serii. Să se calcu-
leze suma seriei V unde a e C si « ^ Z. Se consideră funcţia n^-Loc, (a+n)2
zi->î(z) = . Cum se vede f e Jf ( C \ { — «•)}) şi ,;• = — a este pol (a + z)2
de ordin doi. Luînd drept drumul y„ închis cu suportul pătratul cu vîrfurilef n -\ )(n= ± 1 + i) siaplicînd teorema reziduurilor V —^— dx=
= 2 TC i j V — — + Rez (g, a) I , unde g este definită prin 2i-*-g (2) = \ktin(a+z)2 Vb V '
— •Kctgnz deoarecec,tgnz=ctg( — Tia)Jt-(izz-\-Tza)[— cosec2(—na)+. . . ]
(a+k)2
şi deci reziduul funcţiei z i-> g (0) relativ la punctul2 = — a este egal cu — 7t cosec2«7: şi Rez (g, Tt) =
L(« r °° 1
îă V -* 0 cînd re -» 00, atunci y j «itoo (ffl+w)2
———— = . Observînd + z)2 TUCOSTCS Jr=ft (a+ft)2
ca \ -* u emu re -» 00, atunci y = rr cosecaTc — TT2
133

§3. STUDIUL FUNCŢIILOR MEROMORFE CU AJUTORUL REZIDUURILOR
Dintre aplicaţiile teoremei reziduurilor vom prezenta aici unele proprietăţi ale funcţiilor meromorfe.
5.19. Definiţie. Fie f o funcţie meromorfă pe mulţimea G şi z0 e G. Vom spune că î(z) edivizibilă cu (z—z0)n dacă există r e Rţ şi g € $?( U(z0; r)) pentru care î(z) = g(z) (z—z0)n oricare ar fi zetl {z0, r). Prin ordinul lui î în z0 — notat cu 6 (f, z0) — înţelegem cel mai mare număr întreg n pentru care î(z) e divizibil prin (z—z0)n. Dacă BczG si V 6(f- z)e o sumă finită, atunci aceasta se notează cu 8 (f, B) şi e ordinul lui îpe I),
5.20. Exemple. 1) Fie i{z) = sin2? şi % = 0, atunci 6(f, 0) = 2 deoarece definind
S(z) = sin20 . „ daca z # o
1 dacă z = 0
avem geJ^(C)şi pentru orice 2eC\{0} avem î(z) — g(z)-z2 dar f nu edivizibilă prin s3 căci în caz contrar din f(s) = g1 (z)-z3a>m deducegx(z) = = într-o vecinătate punctată z e U (0, r). Dar lim g2(0) nu e finită,
#3 " s-o. deci gj nu va fi olomorfă în nici un U (0 ; r).
2) Mai general, dacă z0 e un punct regular al funcţiei f şi dezvoltând în serie Taylor obţinem Uz) = (z—z0)n •(«•,,+ an+i(z—z0)+. . .) şi a„ ^ 0, adică î(z0) = . . . = f(«-D(20) = 0, f<»>(20) ^ 0 atunci 0(f, z0) = n.
Definiţia ordinului într-un punct generalizează noţiunea de ordinul de multiplicitate al rădăcinii unui polinom întîlnită în liceu.
3) Dacă zQ e un pol de ordin n, atunci
ci " m =—^~ + •••+ (z-z0r z-z*
pentru orice ze U(z0, r) şi a_n^= 0. Atunci i(z)=(z—z0)'n g(»)unde g(z) = = « L „ + a_„+1(s—z0) + • • • Deci î(z) e divizibilă prin (z—z0)~n şi — n e cea mai mare putere cu această proprietate. Prin urmare 0(f, z0) = —n.
4) Dacă zQ e un punct regular, dar î(z0) # 0, atunci 0(f, z0) = 0 5) Din 2), 3) şi 4) rezultă că ordinul lui f în z0 este n, atunci şi numai
atunci cînd într-o vecinătate punctată a lui z0 avem i(z) = {z—z0f (an + + a„+i (z—z0) + . . .) unde seria are o rază de convergenţă pozitivă şi an ^ 0.
6) P(z) fiind un polinom de grad n rezultă 0(P, C) = n şi această proprietate e echivalentă cu teorema fundamentală a algebrei.
7) Din 5) se deduce uşor că 0 (f-g, z0) = 0 (f, z0)+Q(g, z0);Q (f: g, z0) = =0(1, z0) — Q (g, z0), iar dacă 9(f, B) şi 0(g, B) există, atunci 0( f- g, B) e suma lor, iar 0 (f: g, B) e egală cu diferenţa lor.
134

8) 0(f, D) = V, 0(f, z) este diferenţa dintre numărul JSr de zerouri şi numărul P al polilor funcţiei f în D, dacă se numără fiecare zero respectiv pol de atîtea ori, cit e ordinul lor de multiplicitate. în mod analog $] "z • 0 (f, z) — dacă e o sumă finită — reprezintă diferenţa dintre suma
zerourilor şi suma polilor cu convenţia de mai sus. 5.21. Teorema lui Cauchy privind zerourile şi polii. Fie î o funcţie
meromorfă pe mulţimea deschisă G, neidentic nulă, g o funcţie olomorfă pe G, y un contur omotop cu zero în G ce nu trece prin nici un zero sau pol al lui î. Atunci suma
£ g(#) • 6 (£,#)• » (y, z) e finită şi
1 f f 2îtl J ± î£G
Y
f ~ Demonstraţie. Funcţia h = g e meromorfă în G şi mulţimea
8 = 8(h) a punctelor ei singulare izolate coincide cu A u B unde A mulţimea zerourilor lui f, B mulţimea polilor lui f. Dacă G = w \ # atunci h e olomorfă pe mulţimea deschisă G şi putem aplica teorema reziduurilor deoarece y e un contur din G :
( g — = ( h = 2m £ Rez (h, *)]. n(Y, *) J f J «6S Y Y
şi această sumă e finită. Eeziduul lui h diferă de 0 numai în punctele din S. Fie z0e A u P , deci & = 6 (f, z0) ^ 0. f(«) fiind divizibilă cu (z — zaf va exista o vecinătate deschisă V a lui z0 şi fx e 34?(V) astfel încît pentru orice 26 V să avem î(z) = {z—Zof-i^z) şi fx(«0) ^ 0. Atunci f'(«) = = Totţ-stf-Hte) + (z-z0fi[(z) şi
v, v , * f'(«) &-g(») , g(*)*fi(*) î{z) z — z0 fx(0)
Ultimul termen fiind olomorf într-un disc U(z0; r), reziduul lui h în zQ va fi k • g(«0), deci
C g J l = 2m ]£ g(«)-8(f,*).»(Y,*) J I 'SG r
şi această sumă e finită. • Particularizînd teorema pentru un contur circular şi alegînd g = 1,
obţinem: _ 5.22. Corolar. Fie f o funcţie meromorfă pe G neidentic nulă iar D =
— U(z0; r) un disc a cărei frontieră nu conţine zerouri şi poli ai lui / , B c G. AtU7iei,
J_CX= 6(f ,I>). 2ni ) 1
135

5.23. Observaţie. 1) Corolarul precedent ne permite să calculăm cu ajutorul unei integrale ordinul lui f în B. Acest rezultat e de mare importanţă în algebră, deoarece pentru o funcţie olomorfă acest ordin reprezintă numărul zerourilor lui f (adică al rădăcinilor ecuaţiei f — 0). Teorema lui Eouche ne va furniza o altă metodă utilă pentru determinarea zerourilor.
2) Dacă w0 e C, atunci 8(f — w0, D) pentru o funcţie olomorfă f reprezintă numărul rădăcinilor ecuaţiei î(z) — w0 = 0 în B, adică numărul punctelor z0 în care are loc f (s0) = w0 cu convenţia că z0 trebuie considerat cu ponderea li dacă f'(«0) = • • • = i{h~l){zo) = 0şii(4>(.s0) # 0. Din corolar
1 f f rezultă că 0 (f — w„, U(z0;r))
SU f—w„
5.24. Teorema variaţiei argumentului. Fie f o funcţie meromorfă pe G şi neconstantă, y un drum din O, neted pe porţiuni şi care nu trece prin nici un pol al lui î iar y = f oy. Befinim funcţia I ; C\{y} -> C astfel :
Z(w) = — C -27LiJf
Y
f -w
în aceste condiţii avem :
a) I(w) = n{y, w) b) Bacă y e un drum închis, I e local constantă, cu valori întregi.
U ( o > r)> Y — &D, B <=• G atunci I(w) = n(y, w) = c) Bacă B (f - w, B).
(Zi\
Fis. 5.21
ini ) Y(t)
YC) w di 1
2m
Bemonsiraţie. a) Putem presupune că y are derivată continuă. Atunci şi y, ca funcţie compusă, are derivată continuă pe [0,1] şi y'(*) = f'(y (<)) y'(«)ŞiYva fi rectificabilă. Prin urmare n (y, w) are sens pentru orice w e 6 = C\{y} şi
n(Y,w) = — V- =
Y
f'(Y(«))- v' («) d f _ f(Y(*)) - w
= -!-[- ™ -d^^J-fi-^tw) 27ri J f(Q - w 2rci J f - w
Y Y
Din egalitatea a) proprietatea b) rezultă folosind teorema indexului, iar c) din corolarul precedent, sau din (5.23.2). •
136

5.25. Observaţii. 1) Punctul c) al teoremei variaţiei argumentului ne arată că ordinul funcţiei meromorfă î—w pe un disc B este egal cu numărul de cîte ori imaginea prin f a drumului circular (ce parcurge frontiera discului) ocoleşte punctul w.
2) Considerînd acum valoarea w e G = C\{y} variabilă, numărul polilor fiind constant, teorema variaţiei argumentului are următoarea interpretare geometrică : pînă w nu părăseşte o componentă conexă a lui G, numărul punctelor din B ale căror imagine prin f este w rămîne constant şi se deplasează continuu (fiecare punct z0e B cu î(z0) — w fiind considerat cu ponderea ordinului său). Cînd w traversează {y} şi trece în altă componentă, acest număr se poate schimba, şi anume o valoare z0 e B se apropie de cerc şi părăseşte B sau invers, un nou zx$B cu f(%) = w (sau mai multe) se apropie de cerc şi în momentul traversării de către w a lui {y} punctul % intră în B.
3) Dacă o valoare w0 e G e luată de f de n ori în B, atunci există un disc B=U (w0; r) astfel ca orice valoare Wj e B să fie luată în B tot de n ori. Funcţiile reale nu îndeplinesc o astfel de proprietate. De exemplu, funcţia l{%) = x2 ia valoarea w = 0 în „două" puncte confundate din R (deci punctul x = 0 e de pondere 2) proprietatea îndeplinită pentru w > 0, dar valorile w < 0 nu sînt luate pe R. î n schimb funcţia complexă î(z) = z2 ia în C orice valoare w e C în două puncte.
5.26. Teorema lui Rouche. Bacă î,gsînt olomorfe înG,B = U(zQ-,r) şi BczG şi pentru orice te d B avem \g(Q\ < | f(K)\ atunci
6(f, B) = 0 (f + g, B)
Bemonstraţie. Din inegalitatea din enunţ rezultă că f nu se anulează pe (-/} czB — unde y = SD — deci h — — va fi meromorfă în compo-
f nenta conexă Bx a lui G ce include pe B şi 0 (f + g, B) — 0 (f, B) = = 6 (^-^, D] = 8(14-h,J»)(vezi(5.20.7)) .Săarătămcă6(h+l,D)=0.
Aplicînd teorema variaţiei argumentului avem 8(h + 1, B) = %(y, —1) unde y = h o y. Dar | y (*) | < 1, adică {9} <= Z7 (0 ; 1) deci F = C \ U{Q ;1) c c=C\{y}. F fiind nemărginită şi conexă, va fi inclusă în componenta nemărginită a mulţimii C \ { y } unde conform teoremei indexului valoarea indexului e zero. Dar —le F, deci n (y, —- 1) = 0. •
5.27. Aplicaţii. 1) Vom determina numărul rădăcinilor _ecuatiei a* - Qz + 1 = 0 în coroana circulară U(0 ; 1, 3) = U (0 ; 3) \J7(0 ; 1). în U(0 ; 1) numărul rădăcinilor se poate determina aplicînd teorema lui Rouche funcţiilor l{z) = —9z, g(z) = 2* -j- 1. Dacă ţ e dXJ (0 ; 1) atunci %\ = 1, deci |(:4-f 1)1 < jr;4-4-l<2 < 9 = |—9£|. Prin urmare f are
acelaşi număr de rădăcini ca f + g în U (0 ; 1), adică 1. Cum pe OU (0 ; 1), |f (£) | > |g(£) |, ecuaţia nu are rădăcini pe cerc, deci şi în U (0 ; 1) avem o rădăcină. în £7(0 ; 3) alegem altă descompunere : î(z) = s4, g(#) = ~9z-\-l şi pentru ^ t 9 ?7(0 ; 3)" avem [— 9 £+11 < 9 \l | + 1< 28 < 81 = jC | 4 . Ecuaţia are în Z7(0 ; 3) tot atîtea rădăcini ca f, adică 4, iar in coroana circulară numărul rădăcinilor va fi trei.
2) Teorema lui Rouche ne permite să dăm o nouă şi foarte simplă demonstraţie a teoremei fundamentale a algebrei. Fie P(«) = «» 2* -f
137
+ an_1zn~1+ ... 4- a0, an =£ O, î{z) = anz",g(z) = a^z"--1-;- . . . + «o- Atunci s(z)
lim - — = O şi pentru un r suficient de mare le dU (O ; r) implică *—<» f(») (g(C)| < |f(£)l Şi f avind n rădăcini în D = c7 (0 ; r) rezultă n = 6 (f, B) = 6 (P, D), deci P are în U (0 ; r) n rădăcini. •
Orice funcţie olomorfă f pe mulţimea deschisă G fiind continuă con-traimagiuea unei mulţimi deschise va fi deschisă. Dar printr-o funcţie continuă imaginea unei mulţimi deschise în general nu e deschisă. La o funcţie f = c de exemplu sau pentru î(z) = \z | imaginea lui Z7(0 ; r) nu e deschisă în C.
5.28. Teorema de invariantă a domeniului. Bacă l e olomorfă şi ne con stanţă pe ăome'niul B, atunci oricare ar fi o submulţime deschisă GcD imaginea ei î(G) va fi deschisă în C.
Demonstraţie. Fie w0 e f(6). Există s0 e G şi r1 e R+ pentru care f(#o) = wo Şi D c G unde D = U (z0; r-f) Funcţia f — wfl avind zerourile izolate, va exista un re R+mai mic decît ) \ astfel încît y = $U(z0; r) să nu treacă prin nici un zero, adică w0 e C\{y} undey = f ° y şi putem aplica teorema variaţiei argumentului: I(w) = 8(f—w, Z7 (~0; r)) este local constantă. Avind I(w0) > 0 va exista r 0 eR + pentru care weZ7(w0;r0) implică 6 (f—w, U (z0; r)) = 0 (f — w0, cT (z0; r ) )> 0 ceea ce înseamnă că W€ l(U(z0;r)) <= Î(G). Deci f(<?) e deschisă,
5.29. Observaţii. 1) Denumirea teoremei e justificată de constatarea că dacă G e un domeniu atunci şif((?)va fi domeniu deoarece orice funcţie continuă transformă o mulţime conexă într-o mulţime conexă.
2) Dacă f e olomorfă pe o mulţime deschisă Gx, atunci condiţia de „neconstantă" trebuie înlocuita cu ,,neconstantă local" adică pe fiecare componentă şi atunci imaginea oricărei părţi deschise G din G± va avea imaginea^ deschisă.
3) în studiul topologic al funcţiilor analitice un rol important îl joacă noţiunea de transformare interioară introdusă de S. Stoilow. O transformare f : D -> C definită pe domeniul B este interioară dacă transformă orice parte deschisă într-o mulţime deschisă şi oricare ar fi w e î(D), contra-imaginea f"1 (w) nu conţine nici o submulţime compactă şi conexă (continuu) formată din mai multe puncte. O teoremă fundamentală a lui Stoilow afirmă că orice transformare interioară este omeomorfă cu o funcţie olomorfă neconstantă.
CAPITOLUL V!
REPREZENTAREA CONFORMĂ
întrucit orice funcţie complexă se identifică cu o transformare punctuală in pianul complex, aspectul geometric in studiul acestor funcţii îapătă o importanţă deosebită. în capitolul doi am văzut că o funcţie alomorfă cu derivată nenulă se identifică cu o transformare conformă de clasă G1. Această proprietate geometrică remarcabilă prezintă un mare interes în .aplicaţiile teoriei funcţiilor complexe în variate domenii ale ştiinţelor naturii.
O funcţie uuivalentă (olomorfă şi injectivâ) se va identifica cu o reprezentare conformă a domeniului de definiţie pe domeniul imagine. Eezultatul central al acestui capitol va fi demonstrarea existenţei unei reprezentări conforme între două domenii simplu conexe (teorema lui Eiemann). în acest scop, vom avea nevoie de anumite rezultate privind mulţimile de funcţii olomorfe, precum şi de unele proprietăţi ale funcţiilor univalente. Cu această ocazie vom prezenta şi un criteriu simplu de uni-valenţă, care are numeroase aplicaţii.
§1. MULJIMI DE FUNCŢII OLOMORFE
Pînă acum am studiat îndeosebi proprietăţile unei funcţii olomorfe pe o mulţime deschisă G. De data aceasta ne interesează să punem în evidenţă anumite proprietăţi ale unor mulţimi de funcţii olomorfe, concepute ca mulţimi de puncte din spaţiul funcţional Jf(G).
După cum am văzut, în virtutea teoremei lui Weierstrass, spaţiul vectorial Jf(G), ca şi spaţiul mai larg ^(G), se înzestrează cu structura topologică definită de convergenţa uniformă pe compacte. Deşi ne vor interesa în mod deosebit părţile lui ^(G), definiţiile care urmează se referă ia cazul mai general al părţilor lui <g(G).
6.1. Definiţie. O mulţime F c ^ ( { r ) se spune că este ecMcontinuă în punctul z0eG, dacă oricare ar fi s > 0 , există un -q = t)(s), astfel încît
ze G, \z—z0\ < s, f e ,r=> |f(z) - î(z0)\ < e.
139

Mulţimea J* se numeşte ecJiicontinuă dacă ea este echicontinuă în fiecare punct din G.
Dacă !F se reduce la o singură funcţie f, această definiţie coincide cu cea de continuitate a lui f în punctul z0. Dacă & este formată din mai multe funcţii, este important să subliniem că numărul t\ este acelaşi pentru toate funcţiile din J r .
6.2. Propoziţie. Dacă mulţimea 3F <= %(G) este echicontinuă şi şirul (fn), î„ e #", converge punctual pe o mulţime l e g , densă înG, către î, atunci şirul (fM) converge uniform pe compacte în G către işiîe (£{G).
Demonstraţie. 1) Vom presupune mai întîi că E = G, adică şirul (f„) converge punctual pe G. Fie z0 e G şi s > 0. Din ipoteză rezultă că există un r > 0, astfel încît U(zQ; r) c G şi |f(«) — in{z0) \ < — , pentru orice
3 z 6 U(z0; r) şi orice n e N. Trecînd la limită în această inegalitate, deducem \î(z) — î(z0) | < —, care ne arată că f este continuă în z0. Deoarece şirul
(f J converge în z0 către f, există un n0 > 0, astfel încît \î„{z0) — î(z0) I < —»
pentru n >n0. Deducem că pentru z e U(z0 ; r) şi n > n0 avem
\Uz) - î(z)\ < |f.(«)-t,(»0)|-+|f.(«o)-f(*o)l + |f(«)-*(»o)l < £>
ceea ce arată că şirul converge uniformi pe U(s0; r). Fie Ii un compact inclus în G. Deoarece oricare ar fi z0 e K există un disc compact U(z0; r), r > 0, pe care şirul (f„) converge uniform, iar K poate fi acoperit cu un număr finit dintre aceste discuri, rezultă uşor că (f„) converge uniform pe K către f. 2) în cazul general, fie z0eG şi e > 0 . Există un r > 0 astfel încît U(z0; r) <= G şi \în(z)—în{z0) | < — , pentru orice z e U{z0; r) şi n e N.
Deoarece 13 este densă în G, există un punct ^ e l d U{z0; r), iar şirul (fH) fiind convergent în %, există un n0 > 0 astfel ca
m, n>n0 =s> |fm(%) — fs(%)| < — ,
deci
Ifm(^o) — t»(«o)l < |fm(^o) — f m ( ^ l ) l + | f m ( % ) —
—fn(«l)l + |fK(%) — £»(«o)l < E> pentru orice m, n > n0, ceea ce arată că şirul (fre) converge punctual pe G şi din prima etapă a demonstraţiei rezultă că el converge uniform pe compacte în G, iar limita sa este continuă. Q
8.3. Definiţie, O mulţime #" c <?((?) se spune că este mărginită dacă oricare ar fi compactul J f c <? există un Uf = iU(Jv) > 0, astfel încît
zeX,îeF^- \î{z)\ < 31.
(Conform observaţiei de la (4.1), este suficient ca această proprietate să aibă loc pentru orice disc compact inclus în G.)
140

Eemarcăm că numărul M este acelaşi pentru toate funcţiile din#". 6.4. Propoziţie. Dacă mulţimea ^F<=.^(G) este mărginită atunci şi
mulţimea ăF' = (f',; f e ţF} este mărginită. Demonstraţie. Fie U(z0: r), r> 0, un disc compact arbitrar inclus în
G. Vom alege un B > r astfel ca U(z0; B)cG. Dacă f e & şi z e U(z0 ; r), aplicînd formula iui Cauchy, avem
f'(*) = —Aj-— « , unde y = SU (z0; r). 2r.l J(£ — zf
Deoarece {y} este un compact inclus în G, din ipoteză rezultă că există M> 0 astfel încît |f(£) j < M pentru orice t e {y} şi orice f e J5", deci
\î'(z) |< — — 2-i2 = — - — =M'. 1 2 - (B—r)2 (B—r)*
pentru orice z e U(z0; r) şi feJ% de unde rezultă că J5" este mărginită. D 6.5. Propoziţie. Dacă ^a Jf(G) este mărginită atunci SF este echi-
continuă. _ Demonstraţie. Fie z0 e G şi r > 0 astfel încît U(z0; r)c G. Deoarece,
conform cu (6.4), J r ' este mărginită, iar U(z0; r) este un compact inclus în 67, va exista M > 0 astfel încît
^e U(z0;r), fe#"=> | f ' (0 | < M.
Pe de altă parte, dacă ~ e ?7(20; r), integrînd de-a lungul drumului liniar de la z0 la 0, avem
E(*)-f(*o)=[f'( )dC,
de unde deducem j fi» — f(%h < M\z — z0\, pentru orice zeU(z0; r) şi orice f e #", ceea ce implică ecbicontinuitatea lui OF în z0, care a fost ales arbitrar în G[J-
Din (6.2) şi (6.5), deducem imediat următorul 6.6. Corolar. Dacă mulţimea SFaM'ifi) este mărginită, iar şirul (fn),
ta s J% converge punctual pe o suhmulţime a lui G, care esie ăensăînG, atunci şirul (î„) converge uniform pe compacte în G. •
6.7. Definiţie. O mulţime ^c^(G) se spune că este relativ compactă dacă oricare ar fi şirul (în), fn e #", există un subşir (f„ ) al său care converge uniform pe compacte în G.
In cazul spaţiilor euclidiene, conform teoremei lui Bolzano-Weier-strass, mulţimile mărginite coincid cu cele relativ compacte. Această proprietate se extinde la spaţiul J^(G).
0.8. Teorema lui Montei Pentru ca o mulţime #"c 3tf (G) să fie relativ compactă este necesar şi suficient ca ea să fie mărginită.
Demonstraţie. 1) Să presupunem că #" este relativ compactă. Dacă ea nu ar fi mărginită, ar exista un compact K <= G cu proprietatea că pentru orice n e N există f„ e & şi z„ e K astfel încît \în(zn) | > n. Din şirul (f„) se
!41

poate extrage un subşir (f„;,), care converge uniform pe compacte în G către o funcţie feJf(Cr). în particular, şirul {înk\K) converge uniform către î\K, de unde deducem că există un fc0>0 astfel încît |f„ (zn ) — f(~„;.)! < 1, pentru orice l;>k0. Funcţia f fiind mărginită pe K, va exista un M > 0 astfel încît |f (0) | < M pentru orice zeK, în particular |f(*„ ) ; < ^ şi deducem jf„,(.?„,.) | < l-\-M, pentru h > k0, ceea ce contrazice inegalitatea !£>»j.(-«,.) [ > «/,:; care are loc pentru orice K e N,. 2) Să presupunem că J^ este
mărginită şi fie $ = (fm ; n e N*) un şir oarecare defuncţii din J*. Fie 22 = = {%, #a, . . .} o mulţime numărabilă de puncte din (?, care este densă în (? (de exemplu mulţimea punctelor din G, care au părţile reale şi imaginare numere raţionale). Şirul ele numere complexe
fl(%), f2(%), • • • , ! » ( % ) , • • •
este evident mărginit şi conform teoremei lui Bolzano-Weierstrass, din el se poate extrage un subşir convergent
Şirul de funcţii $2 = (fu, f21, . . . . f . . . ) este extras din S şi converge în %. Procedînd ca mai sus, din 8X se poate extrage un subşir Ss = (fu, f22, f33, . . . . f„2. . . . ) , care converge în 2 şi z2. Continuînd în aceiaşi mod, se construieşte inductiv un şir (#Jdesubţ imria1elui$ ,unde$B= (în,Uz, • • • • • •! f«B> f»+i,«> • • •) este extras din S„_j şi converge în punctele %, c?, . . ., s„. Se constată uşor că şirul diagonal (înn) este extras din orice şir 8H, deci el converge pe E. Aplicînd corolarul (6.6), deducem că acest şir converge uniform pe compacte în G. Q
6.9. Exemple I) Fie G şi G1 mulţimi deschise din C, iar Gx mărginită. Atunci !F = {f e 3^(G) ; f(G) = G±) este mărginită, deci va fi relativ compactă.
2) Fie U = U (0 : 1) şi ^ = I f € Jf 1 £7); |f(«)|< — , zeJjl-\ ' " 1 - | « | j
Această mulţime nu este vidă deoarece, de exemplu, gej*", unde g(z) = — —
3F este mărginită , deoarece pentru orice r € [0,1 [avem
ze V (0; r), îe .? => |f(s)|< 1 —r
» Conform teoremei lui Montei J2" este relativ compactă.
3) Dacă fe X{G) şi J5' = {f—c; o e C} atunci #" nu este mărginită, deci nu este relativ compactă.
î n cazul cînd mulţimea deschisă G este şi conexă (un domeniu) are loc următoarea proprietate mai tare decît cea din (6.6).
6.10. Teorema lui Vitali. Bacă I) este un domeniti din C şi (fj este un şir mărginii, care converge punctual pe o submulţime E a I), care are cel puţin un punct de acumulare înD, atunci şirul (fn) converge unijorm pe compacte în D.
142

Demonstraţie. Din (6.6) rezultă că este suficient să arătăm că şirul (f„) converge punctual pe D. Dacă nu ar fi aşa, ar exista un punct z0e I) astfel încît şirul de numere complexe (în(z0)) să fie divergent. Deoarece acest şir este mărginit, rezultă că el va avea cel puţin două puncte limită distincte w0 şi w,, deci vor exista două subşiruri (înl (c0)) şi (,/„2(~0)) care vor converge către w0, respectiv wx. Aplicînd teorema lui Montei, din fiecare dintre şirurile (f;il), respectiv (fB2), se poate extrage cîte un subşir uniform convergent pe compacte către f, respectiv g, care vor fi în Jtf'(D). Deoarece aceste şiruri sînt extrase din şirul (fM), care convergepe E, rezultă f \E= g \E. Deoarece E are puncte de acumulare în D, din teorema identităţii funcţiilor olomorfe rezultă f = g. Dar aceasta contrazice faptul că î(zn) = w 0 ^ =£ Wj = g(z0). G
§2. FUNCŢII UNIVALENTE
6.11. Definiţie. O funcţie olomorfă şi injectivă pe un domeniu D din C se numeşte univalentă pe D. Vom nota eu ffljD) mulţimea funcţiilor uuivaîente, pe 1).
Moţiunea de funcţie univalentă, care ocupă un loc central în teoria geometrică a funcţiilor complexe, se poate generaliza în mod natural, introducindu-se noţiunea de funcţie multivalentă de un ordin m, prin aceasta întelegînd o funcţie olomorfă pe B, care ia orice valoare a sa m cei mult m puncte distincte din D şi există cel puţin o valoare luată în exact m puncte distincte. Astfel funcţia z H> Z2 este multivalentă de ordinul doi, sau pe scurt, bivalentă pe C.
6.12. Exemple. 1) Orice funcţie omografică este univalentă pe C\{~o}> «Q^e z0 este polul funcţiei.
2) Funcţia ffo) = — - — este univalentă ne U = U (0 ; 1). iar (1 + z)2
r J r î(U) — C \ — , -f- oo . Injectivitatea se arată uşor. iar din f(elB) =
L -i L r i e Ii, deducem î(dU) = co j u {oo }
i 6 j 2 e o s — V 3
3) Prin compunerea a două funcţii univalente se obţine tot o funcţie univalentă.
4) Funcţia î(z) = log — este univalentă pe U = U(0 ; 1) şi
D = f (C)= JweC : —— < J m w < — I fp rin logaritm se înţelege acea ra-1 2 2j ^ '
mură uniformă pe A ={ţeC : Re l > 0} cu log 1 = 0). In adevăr funcţia g(z) =——- este univalentă pe c7 si g(Z7) ^ A. iar funcţia h(£) = log X,
1+z este univalentă pe A şi h(A) = D, de unde rezultă că f = h o g este univalentă pe U şi f(U) — D.
6.13. Teoremă. Dacă f e 3fu(D), atunci f'(c) ^ o pentru orice ze I). Demonstraţie. Să presupunem că există un punct z0 e D astfel ca
f'Oo) = 0. Din această condiţie şi univalentă lui f, rezultă uşor că f şi f
143
nu pot fi constante, deci conform_teoremei zerourilor funcţiilor olomorfe (4.19), există un r > 0 astfel încît U(z0 ;r)cD şi să avem î(z) =£ 0 pentru orice z e U(z0 ;r) şi l(z) # f(z0) pentru orice ze C = dU (z0; r). Deoarece funcţia continuă f—î{z0) nu se anulează pe compactul G, avem min |f(;z) — ~ feo) I = m > 0. Pe baza continuităţii lui f în zQ, putem alege un % e e U(z0; r), suficient de apropiat de z0, astfel încît |f (%)—î{z0) | < m, deci l'f(sfx) — f(«0)| < j f(a)—f(«0)j, pentru orice 2eC. Din teorema lui Eouche rezultă că funcţiile f — i(g0) şi f — f(2x) = f — l(z0) + [î(z0) — f (%)] au acelaşi ordin în U(z0; r). Deoarece $!{z0) = 0, ordinul lui î—î{z0) este cei puţin doi, ca şi ordinul lui f—f(%). Condiţia f'(%) T4 0 arată că % este un zero simplu al lui f—f(%). Eezultă că în U(z0; r) va exista cel puţin un alt zero z2 al lui f—f(%) diferit de zx, deci î{z2) = f(%), unde £2 ¥= z1; ceea ce contrazice inj ectivitatea lui i. D
Din (6.13) şi (2.88) rezultă că dacă îe3fu{D) transformarea f este conformă pe 5 .
6.14. Observaţie. Eeciproca teoremei (6.13), nu este, în general, valabilă, după cum arată exemplul dat de funcţia «« • ez, care nu este univalenta pe C, deşi derivata sa nu se anulează în nici un punct din C. Este interesant de remarcat că pentru funcţiile reale derivabile neanularea derivatei pe un interval este o condiţie suficientă de inj ectivitate, dar nu este necesară, după cum arată exemplul xt-^-x3 (x e II). Această deosebire esenţială dintre cazul real şi cel complex se explică prin faptul că pentru funcţiile complexe nu are loc teorema de medie a lui Lagrange, în schimb este valabilă o anumită reciprocă a acestei teoreme, fenomen pus în evidenţă de D. Pompeiu şi exprimat de propoziţia care urmează.
6.15. Propoziţie. Dacă f e Jf(D) şi z0e D, atunci în orice disc U(z0; r) c D există cel puţin două puncte distincte zx şi z2 astfel încît f(%)—î(z2) = = f (z0) (sx—s2).
Demonstraţie. 1) Fie t'(z0) = 0. Dacă f = 0, rezultatul este banal. în caz contrar, atît f cît şi £ nu sînt constante şi repetând demonstraţia teoremei (6.13), deducem existenţa a două puncte distincte z,, s2e U (z0; r) astfel ca f(%) —î(z2) = 0. 2) Dacă i'{z0) =£ 0, se consideră funcţia g(z) = = i(z)~f (z0) z, ze D, pentru care g' {z0)=0, deci există zx, z2e U (z0; r), zx^z2, astfel ca g{zx) = g{z2), ceea ce implică l{z1)-~î(z2) = i'(z0) (z1~z2).\j
Condiţia î'(z) ^ 0 în D, care după cum. am văzut, este necesară dar nu suficientă pentru univalenta unei funcţii îeJ^(D), este însă o condiţie suficientă pentru a asigura proprietatea de univalenta locală a funcţiei f, conform observaţiei (3.27.4). O condiţie suficientă de univalenta a unei funcţii olomorfe, pe un domeniu, care este des aplicată datorită simplităţii ei, este dată de următoarea
6.16. Teoremă. Dacă î este o funcţie olomorfă pe un domeniu simplu conex D şi există, o funcţie ge 2>VU(D) astfel încît g(D) este im domeniu convex
î'(z) şi Se —— > 0, pentru orice z e D, atunci f este univalenta pe D.
Demonstraţie. Fie A = g(D). Deoarece g este univalenta, există funcţia inversă g_1, care este olomorfă pe domeniul convex A. Eezultă că funcţia h = fcg"1 este olomorfă pe A şi avem
Ren' (w) = Re —— > 0, pentru w = g{z) e A, g'(»)
144

Dacă wx şi w2 sînt puncte distincte din A, integrînd de-a lungul drumului liniar de la "Wx Ia w2, care are suportul în domeniul convex A, obţinem
• • a
h(wa) - h(wx) = ţ h ' (w) dw = (Wg-wjf h' [w1+t(ira--wl)] di,
deci
W , — W, ]
de unde rezultă imediat că h este injectivă pe A şi deducem că f = h o g este univalentă pe B. •
6.17. Corolar. Dacă B este un domeniu convex siîeM'(B) astfel încît Re î'(z) > 0. pentru orice z e D, atunci î este univalentă pe D. •
6.18. Corolar. Dacă £T = J7(0 ; 1) şi fe ăC{XJ) astfel încît Re[ ( l -^ 2 ) f'C^)]^"^, pentru orice ze U, atunci î este univalentă.
într-adevăr, conform cu (3.32), fie g acea ramură uniformă pe U, 1-t- z
care verifică eg(-> = ——- , zeV şi g(0) = 0. Din exemplul (6.12.4) rezultă
î'iz) că g e j£fu(Z7) si g(U) este un domeniu convex. Deoarece Re—— = g'(«)
= Re [(1—z2) f ( s ) ] > 0 din (6.16), deducem feJf(Z7).D Ca o aplicaţie a acestui criteriu de univalentă, vom. demonstra
univalenţa unor funcţii olomorfe reprezentabile prin integrale de tip Poisson- S cnwarz.
6.19. Propoziţie. Bacă funcţia continuă şi neconstantă cp: [0,2TC]->-R este crescătoare pe intervalul [0, ~] şi descrescătoare pe intervalul [-, 2~] şi U = (7(0 ; 1), atunci funcţia î:U -» C definită prin
9 —
±(«) — i, —r. WJ dî, 2 e 6 , J eu — z o
esie univalentă pe TJ. Demonstraţie. Din propoziţia (3.18), relativă la integralele ce depind
ele un parametru, se deduce uşor că f este olomorfă pe U şi 2 -
î'iz) = 2 \ — ş{t) ăi, z e U. o
Folosind proprietatea (3.5.1) a integralei Stieltjes-Eiemann, putem scrie 2x
1 / 1 \ ăt v eu-
f'(sr) = 2i \ — - j — j <f(t) d2 = i -z j
o(o I** r d9(*) i
o 2 -
2 i \ ; dq>(<). J ( l - z ) ( e u - 0 ) o
145

De aici deducem
— R e | > 2 - l ) f ' ( 2 ) ] = : Re
1 ie"— z\2 ' J \&t—zi o o
Deoarece sin î> 0, pent ru te[0, TÎ] şi sin ^ < 0. pen t ru i1 e ["; 2TC], din condiţia impusă funcţiei 9, rezultă imediat Re[(z2—1) f '(2)]>0, pen t ru seC7. Din (6.18) deducem că —f, deci f este univalentă pe U.r\
Cu privire la şirurile de funcţii univalente, are loc următoarea propr ie ta te
6.20. Teorema lui Hurwitz. Dacă şirul (în) de funcţii univalente pe domeniul D converge uniform pe compacte în I) către o funcţie f neconstantă, atunci f e JfM(D).
Demonstraţie. Din teorema lui Weierstrass (4.4) rezultă că f e Jt?(D). Să presupunem că f nu este injectivă, adică există zt, zz e D. z\ ^ z2, astfel încît f(%) = f(.c,
2) = w0. Deoarece f nu este constantă, conform teoremei zerouri lor_ funcţiilor olomorfe _(4.19), există u n r > 0 astfel ca TJ(zx; r) u U {z2; r) c D, U(zx; r) n U{z2; r) = 0 şi pent ru orice 0 e Oa u 0 2 , unde G1=dU (z1; r), C2 = d U(z2; r), să avem fi»— "\v0# 0. Fie m = min
|f(»)— w 0 | > 0 . Deoarece şirul (f„) converge uniform pe compacte, există n0 > 0 astfel ca
n > «0 , ze C'x'j C2 => |f„(«) — î(z) j < m.
Deci pen t ru n>n0 şi s e Ga U C2 avem jfB(s) — f («) |< |f (2) — w01 şi aplicînd teorema lui Rouche (5.26) deducem că pent ru n>n0 avem 0(f—w0, U{zk; r)) = 0(f„ — AV0, U(Z}. ; r)), & e 1, 2, deci f„ — w0 se anulează în ambele discuri, ceea ce contrazice injectivitatea lui î„. D
§3. PROBLEMA REPREZENTĂRII CONFORME
Am văzut că imaginea unu i domeniu D c C printr-o funcţie olo-morfă neconstantă este to t u n domeniu A == î(D). Dacă în plus î'(z) # 0 în D, atunci această transformare este conformă, adică conservă măr imea şi sensul unghiurilor, după cum s-a văzu t la (2.89). Reciproc, orice t ransformare conformă (de clasă C1) p e D este o funcţie ol om or fă cu der ivată nenulă pe D ((propoziţia (2.93)). Din acest motiv, pu tem considera că o transformare conformă este o funcţie olomorfă cu derivată nenulă.
Dacă f este univalentă pe D, a tunci ea realizează u n omeomorfism între D şi A = î{D), iar transformarea inversă f"1 este univalentă pe A. P e de altă par te , conform teoremei (6.13), transformarea f este conformă, ca şi f_1.
{z --fi) (1— e'\)
e" — do (t) =
146

6.21. Definiţii. Fiind date domeniile D şi A dinC, o funcţie îeffu(D) astfel ca f(D) = A se numeşte reprezentare conformă (sau izomorfism conform) a domeniului D pe domeniul A. Domeniile D şi A se zic conform echivalente dacă există o reprezentare conformă a lui D pe A. î n acest caz transformarea inversă va fi o reprezentare conformă a iui A pe D. O reprezentare conformă a lui D pe el însuşi se numeşte, automorfism conform al lui D. Mulţimea automorfismelor conforme ale lui D formează, evident, un grup de transformări, care se numeşte grupul conform al lui D, pe care îl vom nota A(D).
Problema directă a reprezentării conforme constă în a găsi imaginea unui domeniu D, dacă se dă fe JfB(D). Pen t ru unele funcţii elementare o astfel de problemă a fost rezolvată în capitolul doi.
O problemă mai grea, dar foarte importantă în aplicaţii, este cea inversă, care este propriu-zis problema reprezentării conforme : fiind da te două domenii D şi A din C, să se găsească o reprezentare conformă a lui I) pe A, adică să se găsească f e 3^U{D) astfel încît f(-D) = A.
Desigur, că pr ima întrebare care se pune este cea a existenţei unei astfel de reprezentări . Să observăm că dacă D este u n domeniu simplu conex şi f este univaîentă pe D, din faptul că f este un omeomorfism rezultă imediat că şi A = î{D) este un domeniu simplu conex. î n adevăr, dacă Y este un drum închis din A, atunci f"1 ° y este un drum închis din D, care va fi omotop cu zero în D, iar dacă 9 este o deformaţie continuă a lui P 1 ° y în punctul z0 e I), a tunci f ° 9 va fi o deformaţie continuă a lui y în punc tu l f(0o) G A, deci y va fi omotop cu zero în A. De aici deducem că u n domeniu simplu conex nu se poate reprezenta conform decît tot pe un domeniu sinrplu conex. Astfel un disc nu poate fi reprezentat conform pe o coroană circulară.
6.22. Propoziţie. Dacă f0 este o reprezentare conformă a lui D pe A, atunci mulţimea tuturor reprezentărilor conforme ale lui D pe A este {f ; f = ? ° t ' o , ?eA(A)}.
î n adevăr, dacă f este o astfel de reprezentare, atunci 9 = f ° f01 e
6 A (A). Invers, dacă 9 e A(A), atunci f = 9 ° f0 este o reprezentare conformă a lui -O pe A. •
6.23. Propoziţie. Orice reprezentare conformă f: D -» A induce un izomorfism de grup f* : A(D) -* A(A) definit de f* (9) = f ° 9 ° P 1 , pentru orice 9 e A{D).
î n adevăr, dacă 9 eA(D), se verifică imediat că f*(9)e J-(A).. Dacă i e i (A), atunci P 1 ° ^ f e A (D). P e de altă par te avem P 1 ° <J>J o f = = P 1 o CD, o f => o1 = a>„, deci aplicaţia f* este bijectivă. Mai avem f*(91)o f* (<p2)='(f° 9 i ° P 1 ) o ( f o ? 2 o f-i) = f o( ? 1 = <p2)o f - i = f* ( 9 l o <pa), deci f* este izomorfism de grup. D
î n ceea ce urmează vom nota cu U = U (0,1) şi îl numim discul unitate al planului complex.
6.24. Teoremă. Grupul conform A(U) al discului unitate este subgrupul transformărilor omografice 9 de forma
<p(«) = e'e z~a^ , 0 e R, a e U. 1 — ăz
Demonstraţie. 1) Orice transformare omografică 9 de forma de mai sus este un automorfism conform al lui U, după cum s-a văzut la (2.73).
14?

2) Fie îe A (U) şi să notăm f(o) = w0. Să considerăm funcţia g — <p ° f, unde cp e A (TJ) este definită de
<p(w) = ^ r ^ 5 w G (/. 1 — w0w
Deoarece g(o) = 0 şi|g(«)| < 1, pentru ze TJ, aplicînd lema lui Schwarz, deducem |g(2)|< \z\, pentru orice z e Î7. Pe de altă parte, funcţia inversă g_ 1= f_1 o cp-1 îndeplineşte şi ea condiţiile lemei lui Schwarz şi avem |g_1(w) K lwl» pentru orice w e TJ. Punînd w = g(z), deducem \z\ < \g{z)\. Din cele două inegalităţi deducem \g(z)\ =\z\,ze TJ. Această egalitate fiind valabilă numai cînd g(z) = eifl z, 6 e B , deducem că f(») = <p_1 (e,90). Punînd a = — e19 w0, obţinem î(z) = e 1 9 - ^ — ^ - D
1 — az
§4. REPREZENTAREA CONFORMĂ A DOMENIILOR SIMPLU CONEXE. TEOREMA LUI RIEMANN
După cum am observat, un domeniu simplu conex nu poate fi conform echivalent decît tot cu un domeniu simplu conex. în ceea ce urmează ne vom limita numai la astfel de domenii, dintre care vom distinge două domenii „standard", anume planul C şi discul unitate TJ. Se poate arăta
IZ
uşor, considerînd de exemplu funcţia f: TJ -» C, definită de î[z) = •—«
z e TJ, că C şi TJ sînt omeomorfe. I n schimb are loc următoarea 6.25. Propoziţie. Domeniile C şi TJ nu sînt conform echivalente. în adevăr, dacă ar exista f e -^«(C) şi f(C)= TJ, funcţia f ar fi întreagă
şi mărginită; conform teoremei lui Liouville ea s-ar reduce ia o constantă, ceea ce nu este posibil. •
De aici rezultă că, dacă vrem să reprezentăm conform un domeniu simplu conex D pe TJ, va trebui să presupunem J) # C.
înainte de a demonstra teorema fundamentală privind existenţa unei astfel de reprezentări, vom preciza mulţimea tuturor reprezentărilor conforme ale unui domeniu simplu conex pe TJ. Anume din (6.22) şi (6.24), deducem imediat următoarea
6.26. Propoziţie. Dacă JJ este un domeniu simplu conex din C şi î0: D -* TJ este o reprezentare conformă a lui D pe TJ, atunci mu'.ţimea tuturor reprezentărilor conforme ale lui D pe TJ este formată din toate funcţiile f : D -> TJ, care sînt definite în D prin
Î(Z) = eie f o ( g ) ~ - , QeR,aeU.n 1 - ăfo(0)
De aici rezultă că mulţimea reprezentărilor conforme ale iui D pe TJ formează o familie de funcţii univalente pe D depinzînd de trei parametri reali. Vom putea deci dispune de aceşti parametri pentru a determina o anumită reprezentare conformă, care să verifice anumite condiţii supli-
143

mentare. Astfel în această familie există o singură funcţie f, care verifică condiţiile î(z0) = 0 şi î'(z0) > 0, unde z0 este un punct 'fixat din B. într-adevăr, prima condiţie îl determină pe a = î0(z0), iar a doua condiţie, care se poate scrie arg î'(z0) = 0, ne dă imediat 6 — — arg fo(»0)-
6.27. Teorema lui Riemann. Orice domeniu simplu conex B din C, B ^ C, este conform echivalent cu discul unitate U.
Demonstraţie. 1) Să fixăm un punct z0 e B şi fie
F = {f; f e *„(D), f(*0) = 0 şi f(D)c= f7}
Vom arăta mai întîi că mulţimea ^ nu este vidă. Deoarece B # C, putem alege un punct a e C \ D . Conform teoremei ramurilor uniforme (3.22), există o funcţie g e 3tf{B) astfel ca [g(s)]2 = z—a, ze B. Dacă %, «2 e -D §i g(~i)=±g(%)) atunci [g(%)]2 = [g(22)]2 deci z\ — z%- ^n particular rezultă că g e Jfu(B). Deoarece g(B) este un domeniu, există r > 0 astfel ca U (g(z0); r) c g(D). Să arătăm că U(—g(z0); r)ng(-D)=0. în adevăr, în caz contrar, ar exista un % e D astfel încît jg (%) + g(#0)l < r> care înseamnă că — g(%) e O" (g(»0) > r) c g(^j> deci va exista un z2 e B astfel încît g(Zj) = — g(«2), ceea ce implică % = z2, deci g(%) = 0 adică zx = a,
r ceea ce nu este posibil. Eezultă că funcţia gx = • este univalentă 9 + 9(z0)
pe B şi gx(-D)c C. Alegînd cp e A(TJ) astfel încît cpCs^o)] = °> Şi notînd ga = ? ° gu deducem că g2 este univalentă pe B, g2{zQ) = 0 şi g2(B) c Î7, deci g2e J5".
2) Să ataşăm fiecărei funcţii feJ5" numărul strict pozitiv |f'(20)l-Deoarece acest număr reprezintă coeficientul de deformare liniară în punctul z0 prin transformarea f, ne putem aştepta ca pentru funcţia căutată f o e f , pentru care î0(B) = TJ (adică domeniul î0(B) este cel mai „întins"), \io{z0)\ să aibă valoarea maximă. Fie atunci M = sup {\î'(z0)\, i e J5"}. Din definiţia lui J5" rezultă că această mulţime este mărginită, iar din (6.4) rezultă că şi &' ={f'; f e J^} este mărginită şi deducem că 0 < M< < + co. Din definiţia lui M rezultă că oricare ar fine N* există fB ei5" astfel încît
M <K(zQ)\<M, n
deci lim |f^(s0)i = -J- Deoarece mulţimea !F este mărginită, conform teo-remei lui Montei, ea este relativ compactă, deci din şirul (/„) se poate extrage un subşir (f,v.) uniform convergent pe compacte către f0 e #C(B). în particular, f0 (z0) = lim îm.(z0) = 0. Conform teoremei lui Weierstrass, şirul (f'„k) converge uniform pe compacte către î'0. De aici rezultă că M= limj înk(z0)\ = \î'0 {z0)\. Funcţia f0 nu poate fi o constantă, deoarece,
&->co
în caz contrar, din î0(z0) = 0 ar rezulta că este identic nulă, ceea ce intră în contradicţie cu \f'o(zQ)\ = M> 0. Deoarece funcţiileîn]c sîntunivalente, din teorema lui Hurwitz deducem că f0 e Jf„(D). Pe de altă parte, avem %.hiz)\ < 1> pentru orice ze B şi orice &e N. Trecînd la limită, obţinem \î0(z)\ < 1. Deoarece f0 nu este constantă, conform teoremei maximului
Î49

modulului, egalitatea nu poate avea loc pentru nici un punct din D, deci avem |f„ (z)\ < 1, pentru orice s e J ) , adică f0(-D) <= U- Din cele de mai sus, rezultă că f0 e J* şi
6.28. %(z0)\ = i ¥ = s u p j f ( 2 o ) | .
3) Eămine să arătăm eă f0(-D) = U. Presupunînd că nu ar fi aşa, ar exista un a e U\î0 (D) şi alegînd <\> e A(U) definită prin
9(W) = = — s W G U, 1 — aw
deducem că funcţia olomorfă <h o f0 nu se anulează în D şi conform cu (3.22), va exista o funcţie h olomorfă pe D astfel încît h 2 = 'i^fo- Deoarece ($ ° f0) (-D)c CT, deducem h(D)c Î7. Este uşor de verificat că h e ^f„(D). De asemenea avemih. («o)'2 = | —a|= |a | şi 2h (z0) h'(»0) = tl/[f0(2o)]fo(2o) = --=4'(0)f^o) = (l-!«i2)fo(z0), d e c i
Ih'te "ii — 1 — ' a ' 2 ! f (2 1! — 1 ~ ' K i 2 71/
Fie x e i ( f / ) definită prin: w — h00)
X(w) = - — _ - 1 ° 5 w e U. 1 —h(20)w
Funcţia î = p h este univalentă pe D, f(D)cZ7 şi f(s0)=0, deci f e #". Pe de altă parte, avem
?(*o) = x W o ) ] h' (*o) = - ^ ,,>'(*o) • 1 jn(sc) I
de unde obţinem
°;l l - | a | 2f |«| 2K|a|
Deoarece 1+|oc| > 2^ |a | , deducem |f ( s 0 ) |> Jf, ceea ce contrazice (6.28). Această contradicţie ne arată că f0 (D) = V şi teorema este complet demonstrată. D
6.29. Corolar. Dacă D este un domeniu simplu conex din C, D # C şi 20 e D, atunci există o funcţie unică f e yfu(D), normată cu condiţiile i[zQ) == 0, f (s0) = 1, care reprezintă conform domeniul D pe un disc cu centrul în origine. Raza acestui disc se numeşte raza conformă a domeniului D în punctul z0.
Demonstraţie. Fie f0 reprezentarea conformă a lui D pe V, care verifică condiţiile fB(z0) = 0, f0(z0) > 0. După cum am văzut, această reprezentare este unică. Notînd B = — funcţia f = Bî0 va reprezenta
fo( o) 150

conform domeniul 1) pe 27(0 ; Ii) şi va verifica condiţiile i(z0) = 0, î'(z0) = l. Pent ru a arăta unicitatea funcţiei f, să presupunem că ar exista î± e M'Jl)), normată cu condiţiile Î^ZQ) = 0, i[(z0) = 1, care reprezintă conform domeniul I) pe un disc U(0 ; Bx). Atunci funcţia f2 — — îx va reprezenta
conform domeniul D pe discul un i ta te 27 şi îz(z0) = 0, f2 (c0) > 0. P e baza unicităţii unei astfel de reprezentări, deducem f„ = f0, adică l i l
— fx = f0, deci - = i'0(z0) = — , de unde deducem i?-, = B şi fx = Bî0 = J?! 7?ţ B = f. D
O altă consecinţă imediată a teoremei lui E iemann pune în evidenţă o proprietate de minim a maximului modulului. Fie D un domeniu simplu conex din C, D =£ C, care conţine originea şi fie 2F = {f; f eJf(D), f(0) = 0, f'(0) = 1}. Această mulţ ime nu este vidă, deoarece conţine funcţia identi tate i(z) = 0. Definim pe J5" aplicaţia (funcţionala) M : J5" -> [0, -j-oo] prin
M(f) = sup jf (z)\, f e #-.
6.30. Corolar. Marginea inferioară a funcţionalei M este egală cu raza conformă B a domeniului D în origine şi este atinsă pentru funcţia unică î'i e yfu(D), care reprezintă conform domeniul I) pe discul 27(0, B), adică
M(fj) = JB = minM(f) .
Demonstraţie. P ie f0, f0(0) = 0, fd(0) > 0, reprezentarea conformă unică a lui D pe discul uni ta te U şi fie g = fă1- Să obsevăm că pent ru a găsi marginea inferioară a lui M(f) în clasa #", este suficient să ne limităm ia acele funcţii din SF pent ru care M(f) este un număr finit. Vom nota
J^o = {f ; f e 2F, M(f)< + o o } . Fie f € #"0 şi să considerăm funcţia h = —— M(f)
f o g, care este olomorfă pe 27 şi verifică condiţiile h(0) = 0 şi |h(w) | < 1, pent ru orice w e 27. Aplicînd lema lui Sehwarz, deducem | h ' ( 0 ) | < ; l , adică M(f) > — - = B. Egal i tatea are loc numai pent ru funcţia h(w) =
f£(0) = cw, \o\ — 1, adică numai în cazul cînd M(f) cw = f[g(w)], we 27. Punînd w = iQ{z), ze B, deducem î{z) = cBf0 (z). Deoarece f'(0) = i , obţinem f = f1 = Bi0, care reprezintă conform domeniul D pe 27 (0 ; B).0
6.31. Observaţii. 1) Din teorema lui E iemann rezultă că oricare două domenii simplu conexe din C, diferite de C, sînt conform echivalente. De aici rezultă că, în raport cu această relaţie (de conformitate), mulţ imea tu turor domeniilor simplu conexe din C se împarte în două clase de echivalenţă : una din clase este formată numai din C, iar în cealaltă clasă intră toa te domeniile simplu conexe diferite de €.
2) Dacă D este un domeniu simplu conex din C, diferit de C, grupul conform A(D) este izomorf cu -4.(27), în v i r tu tea propoziţiei (6.23); toa te grupurile conforme ale domeniilor simplu conexe din C, diferite de C, sînt izomorfe.
3) Grupul conform A(C) este format din nxulţimea transformărilor f: C -* C, unde î{z) = az + b, a, b e C, a i= 0. î n adevăr, orice transfor-
151

mare de această formă este, evident, o reprezentare conformă a lui € pe C. Invers, f ie je A(C) şi pentru r > 0 arbitrar ales să_ considerăm vecinătatea V = Coo\C(0 ; r) a punctului oo. Deoarece f~1(L7 (0 ; r) este compactă, rezultă că W=Coo\f_1 (£7(0 ; r)) este o vecinătate a lui oo, iar din f(W nC)c <= V deducem că lim 1(2) = co, deci oo este un pol pentru funcţia întreagă f
z->co şi conform cu (4.53), f este un polinom. Dacă gradul său ar fi mai mare ca 1, atunci, conform teoremei fundamentale a algebrei, f ar avea cel puţin un zero în C, în contradicţie cu (6.13). Rezultă că i{z) = az + b cu a =£ 0.
5) Teorema lui Biemami, care are un caracter foarte general, se referă la existenţa unei reprezentări conforme. Problema construirii efective a unei astfel de reprezentări se poate rezolva pentru anumite clase de domenii, prin elaborarea unor metode speciale.
5) Reprezentarea conformă stabileşte o corespondenţă între punctele a două domenii. Problema corespondenţei între punctele frontieră ale acestor domenii prin reprezentarea conformă respectivă este mai dificilă. Pentru aceasta se pot consulta [6], [7] şi [24].
C A P I T O L U L V i l
PRELUNGIREA ANALITICĂ
Prelungirea unei funcţii f: E -> F este o altă funcţie î\: E\ -+ F astfel ca E să fie inclusă în E± şi î±\E = f. Dacă f aparţine unei clase de funcţii liniare, continue sau de clasă C'-n) se caută prelungiri de aceeaşi clasă. Evident, restricţia lui fj la E e unică, în schimb prelungirea nu e unic determinată de supramulţimea Ex. în cazul funcţiilor oiomorfe, prelungirea, dacă există este unică. Vom exploata în cele ce urmează acest fapt fundamental. în mod natural apare problema găsirii unui domeniu maxim de oiomorfe. Vom constata că acest lucru în generai nu e posibil,. deoarece prelungirea realizată pe drumuri diferite poate da într-un punct z valori diferite pentru funcţie. Atunci putem adopta două soluţii. Sau renunţăm la noţiunea obişnuită de funcţie (tripletul (G, C, /)) şi considerăm o „funcţie globală" formată dintr-o mulţime de funcţii oiomorfe, sau considerăm o nouă funcţie (X, C, f) unde f : X -» C, dar X nu e o submuiţime a planului complex ci o nouă mulţime, dotată cu o structură specială şi care va purta numele de suprafaţă riemanniană.
§ 1. PRELUNGIREA ANALITICA
în acest capitol vom considera mulţimea 3tf a tuturor funcţiilor oiomorfe definite pe domenii si vom folosi notaţia (f, B) e 3f în locde f e yf(B).
7.1. Definiţie. Dacă (fj, Dx), (f2, ba)eJr, G = D1 n I)2 * 0 şi fţ | G = f21 G atunci spunem că cele două funcţii sînt în p elungire analitică directă (sau pe scurt prelungire directă).
Dacă în plus Dx c D2 atunci spunem că (f2, D2) e o prelungire olo-morfă a lui (f1? B-J.
Din teorema identităţii rezultă că preulungirea directă e unică în sensul că dacă (g2, D2) şi (f2, D2) sînt în prelungire directă cu (f1? Dj) atunci f2 = g2. Eelaţia de prelungire directă deşi reflexivă şi simetrică nu este o-relaţie de echivalenţă, deoarece dacă (f2, Da) prelungeşte direct pe (f,, Bt) iar (fg, D3) pe (f2, D2) domeniile B1 şi B3 pot fi disjuncte sau chiar cînd intersecţia lor e nevidă ca în figura 7.1 îx şi f3 pot să nu coincidă aici. Pentru a realiza înfăşurătoarea tranzitivă a acestei relaţii procedăm, astfel: Două funcţii oiomorfe (î, B), (î^B^) se spun a îi în prelungire analitică
153

(pe scurt în prelungire) dacă există funcţiile (îk, Bk) (Ic e O, n) astfel încît să avem (f, D) = (i0, D0), (f*,2>*) = (f„, I>Jjar (f*-i, I V x) şi (ft, D t) să fie în prelungire directă pentru orice k e 1, n. Familia ((ft, Dk) : k e 0, n)
se numeşte lanţ de prelungire. Belaţia de a fi în prelungire e o relaţie de echivalenţă în 2/f. O clasă de echivalenţă i e formată deci din toate funcţiile olo-morfe (g, E) ce prelungesc un (f, B) dat şi se numeşte funcţie analitică globală.
\ r> ^\ / D / Gwaa (g', E) va prelungi în acest caz pe (î'.B) această nouă clasă se notează cu f' şi se numeşte derivata funcţiei globalei.
Dacă (f1; B±) şi (f2, D2) sint in prelungire directă, putem defini o prelungire olomorfă comună : (f. B1 u B2) definită prin î(z) = î^z) clacă z e B1 şi tiz) = î2(z) pentru z e D2. Dacă însă funcţiile date sînt doar în prelungire
mai e în general posibilă (vezi cazul ilustrat în figură). Din acest motiv folosim noţiunea de funcţie globală ca o mulţime de funcţii şi nu o funcţie obţinută prin „contopire".
Dăm două căi de construire a prelungirilor. 7.2. Prelungire printr-o ecuaţie funcţională Să considerăm funcţia F a lui Gauss
Fip
aceasta m uire nu
e~( t*'1 dt
unde zeii, iar t o variabilă reală. Se ştie din analiză că această integrală e convergentă, cînd ?eR~. Se poate arăta că ea rămîne convergentă pentru orice? e C pentru care Re z> 0, deci F e definită pe B0 = {x + -+- iy € C : x > 0} şi verifică relaţia F(z — 1) = z- F(z), sau mai general P (z+ n) = ziz + ! ) . . . ( « + ?!—!)• r(«) pentru z e B0, adică
i » I > - n) *(z+l) . . . [z+n~ 1)
însă T (s — JI) e olomorfă pentru orice 0 e 2?„ = [x -j- ii/ e C : deci formula — »
£.(*) r(» + n) z(z+ 1) ... (z+n-1)
defineşte pe f„ nu numai pe D0 ci pe Bn= En\{0, — 1 , —2, . . ., — » + l } , şi ea coincide cu F pe B0, deci valoarea ^(0) nu poate să depindă de n. Luînd pe n e N suficient de mare, putem calcula valoarea prelungirii olo-morfe pe orice z e B = C\{0 , — 1 , —2, . . .}
7.3. Prelungirea prin serii Taylor a fost elaborată de Weierstrass; ea e mai laborioasă, dar e universală.
154

Fie (f; D) o funcţie olomorfă, z0 e D şi y un drum ce porneşte din s0. Dezvoltăm f într-o serie Tayloriană în jurul lui z0: S0{z). Aceasta va converge într-un disc D0 = U(z0; r0). Alegem txe ] 0, 1] astfel ea • / [ O ^ c J ) , şi not înd^ = y(£x), dezvoltam pe S0 în jurul iui z1 : obţinem o serie de puteri Sx(z), convergentă în discul B1— TJ {zx; rx). Continuăm acest procedeu : dacă Sn(z) e definit într-un disc t>„ = U(zn ; r.„) unde zn = = y{tn),, alegem tn+1 e [tn,l] astfel ca y[tn, tn+1] c J)n şi dezvoltăm pe Sn în serie de puteri în jurul punctului 0n+i= y(tn+1), obţinînd 8n+1(z) convergentă în Z>„+1 = U {zn+1 • rn+1). Generalizăm acest procedeu.
Ideea drumului y care „conduce" prelungirea e utilă şi o transpunem pentru o prelungire analitică oarecare.
7.4. Completare la definiţia (7.1) Vom spune că (f*, D#) e o prelungire a lui (f, D) de-a lungul drumului y, dacă există un lanţ de prelungire (•(ffc, D;„.) : h e 0, n) şi o diviziune A = (t0, t1} . . ., tn) a lui [0, 1] pentru care ylh-i, tk]cDt pentru hei, n şi y (0) e D0. Vom nota pe y (tk) cu zK.
Fig. 7.4
7.5. Exemple. 1) Considerăm suma sx(z) a seriei de puteri J] 02'" care-»=o
converge în Dx = £7(0; 1) şi o prelungire de-a lungul lui yt(t) = 2t. Dezvol-
tînd pe s1 în jurul lui yx — 1 = — obţinem o serie Taylor cu raza de conver
genţă B2 — — : deci U\ — s —j <= £7(0,1) şi nu obţinem o prelungire efec-3
tivă. IsTIci t — — nu dă rezultate. De-a lungul lui y1 nu reuşim să ieşim.
din Dv
Fie y2(2) = 1^ U (X2 u X3) unde \ e drumul liniar din 0 în ir Â2 din i în 2 + i, X3 din 2 + i în 2. Dezvoltăm în jurul lui z1 = y21 — j =— şi
' V 4 ) 2 obţinem o serie convergentă în P r ^ - ' V aP°^ trecem la 22=y21 -~-) = i r
-3 = Y2 I — I = l + i , ZA—YO I — I = 2 + i , z- — v, (1) = 2. Obţinem astfel o V 8 ) \i)
1 (*i,A> serie Sb{z) — V «„(.- —2)" convergentă în £7 (2, 1) şi s5 0) = .
«=0 -1-—Z poate fi prelungit de-a lungul oricărui drum ce evită punctele 1 şi —1 ;-valoarea funcţiei prelungite e în orice 2 e C \ { — 1, 1} egală cu -•
în acest caz (su ZXJ are un domeniu maxim de olomorfie •: D0 = C\{—1,-f-l} si o prelungire olomorfă maximă f : D0 -* C. î(z) = . Funcţia-
1 — z%
globală f e formată din toate restricţiile lui f la domenii D e D0. 155*

2) Pornim de la (f0, B0) unde B0={x+iye C : x > 0} iar f0 e o ramură i
_ —arg z -uniformă a lui ]fz: î0(z) = ][ \z j e2 . Prelungim de-a lungul unui drum y ce porneşte dm B0, ocoleşte originea şi revine în z0 : y(t) = e . Valorile funcţiei prelungite sînt de semn opus celor ale lui f0. Cu serii de puteri procedeul merge mai lent. Putem alege lanţul de prelungire astfel: B1 = {ze e C\{0} :~'K--<wg 0<~sau —7: < arg z < ~L ,BZ = J2:eC\{()} : —TT<
_ 1 — arg 2
< arg z < — l J lx{z) = V \z | e dacă z—x + iy e B1 şi y > 0 ; în schimb
pentru y < 0 avem f3(2) =1/ |#[ e iar f2(#) =]/ \z\ e pentru orice z e D2. Funcţia globală f determinată de (f, B) e generată de aplicaţia multivocă ]fz.
3) Fie î(z) = In\z\ + i arg z considerată pe mulţimea B — {x 4--r iy e C : x > 0} (f este o ramură uniformă a aplicaţiei multivoce Log). Putem prelungi (f, B) de-a lungul drumului y(t) = e2~" şi obţinem funcţia (£*, -O*) unde D* = X*, ît.{z) = In \z\ + i (arg 2 + 2n). Printr-o nouă prelungire a lui (f#, -D) de-a lungul aceluiaşi drum y ajungem la (f**, B) unde f**(s) = î*(z) + 2~i ş.a.m.d.
Dacă pornind de la (f, B) prelungim de-a lungul lui y~ obţinem (f-, B) unde t~(z)= î(z)— 2ni. Prin urmare în acest caz există o infinitate •de funcţii (f„, B) distincte definite pe acelaşi B şi care aparţin funcţiei .globale î definită de aplicaţia multivocă Log. Se vede uşor că şi invers, orice ramură uniformă a lui Log aparţine lui f. î e generată deci de aplicaţia multivocă Log.
4) Dacă (î, B) şi (f*, B*) sînt în prelungire analitică şi ((f;„ Bk) : : k e 0, n) e un lanţ de prelungire, atunci există un drum y de-a lungul
căruia s-a realizat prelungirea. într-adevăr Gk = Bk_1 n Bk fiind nevidă alegem cîte un element zk_1 e G,:. D a r s ^ , zk, aparţinînd lui Bk va exista un drum poligonal y* în Bk ce le uneşte. Atunci drumul y = Yi U . . . U y„ va îndeplini condiţiile din definiţia (7.4). Drumul poligonal y nu e însă unic în acest sens şi-1 putem alege într-un mod particular şi anume ca toate vîrfarile drumului să fie numere complexe raţionale (de forma qx -f- q2 i •cu q15 q , eQ) . într-adevăr fie e = d ({y}, C \ u {Bk : Jc e 1, n}). Atunci U ({y*}, e)c Bk, deci modificînd vîrfurile zkJ ale lui y* fără a ieşi din U({-/k},e) le putem înlocui cu vîrfuri raţionale, şi drumul poligonal modificat y' va avea vîrfarile raţionale şi va rămîne drum de prelungire.
7.6. Germeni de funcţii analitice. Să considerăm o funcţie globală f. Deşi e generată de o funcţie (oricare din elementele ei (f, D)) ea nu este în general o funcţie, deoarece nu întotdeauna realizează o corespondenţă univocă. Să considerăm două elemente (f1? Dx), (f2, B2) e 1 pentru care există z0e BX(\B2. Din exemplele (7.5 .2) şi (7.5.3) se vede că se poate întîmpla ca îi{z0) să fie diferită de î2(z0). î n alte exemple apar situaţii în care deşi î1(z0)=f2(z0) dar în nici o vecinătate U(z0, r) inclusă în B1 n B2 cele două funcţii nu coincid . Vom spune în acest caz că fx şi f2 coincid „întîmplător" în z0. Să notăm cu Bc reunirea tuturor mulţimilor B pentru care există (f, D)e f. B( se numeşte suportul funcţiei globale date. Dacă alegem un z0 din suport, f ataşează lui z0 în general mai multe valori prin intermediul elementelor ei. Deci suportul nu corespunde ca mulţime de defi-
156
niţie ci fiecare element z0 e D{ trebuie luat în mai multe exemplare şi anume considerăm toate elementele (f, D)e f pentru care z0 e D şi z0 va trebui luat în atîtea exemplare cîte funcţii (f, D) e î vor lua valori diferite în z0 sau doar întîmplător egale. în acest sens vom înlocui punctele lui Bt cu „obiecte" (f, z) aşezate „deasupra" punctului z şi care se numesc germeni de funcţie analitică. Astfel î care realiza iniţial o aplicaţie multivocă pe suportul ei devine o funcţie.
Acest procedeu seamănă cu cel prin care se trece de la o funcţie neinjectivă f: E -* F la alta f: E -> Ff injectivă unde Vt e graficul lui f; aplicaţia f{x) — (x,f(x)) este evident injectivă. în cazul nostru însă mulţimea Bt este cea care se înlocuieşte cu o nouă mulţime care devine mulţimea de definiţie a lui î şi anume suprafaţa riemanniană X{ a lui î şi a cărei elemente sînt germeni.
Fie Jf (z0) = {(f, B)e 3f : z0e B). Introducem în 3l?(z0) o relaţie de echivalenţă : (f1? Bt) ~Zs(f2, B2) atunci şi numai atunci cînd există r e R+
astfel ca B = U (z0; r)c Bx n B2 şi îx\B = f2\ B. Clasele de echivalenţă în care se descompune 3f(z0) se numesc germeni de funcţii analitice (sau pe scurt germeni) peste z0. v.H fiind aplicaţia canonică, x2o(f, B) este germenul peste z0 din care face parte (f, B) şi e format din toate funcţiile olomorfe pe un domeniu ce conţine pe zg şi coincid cu f pe cîte o vecinătate a lui z0. Vom nota acest element cu (f, z0). z0 este proiecţia lui (f, z0) şi notăm z0 = pr (f, z0). Mulţimea tuturor germenilor (f, z) o vom nota cu X.
Dacă (f0, z0) e X, germenul are o valoare bine definită în z0, deoarece alegînd (f1? Bx), (f2, B2) e (f0, z0) avem Î^ZQ) = î2{z0). Acest număr complex e valoarea germenului (f0, z0).
Introducem în X o relaţie de echivalenţă. Spunem că (f, z), (f*,%) din X sînt în prelungire analitică de-a lungul unui drum y, dacă y(0) = z, Y ( 1 ) = % şi există două funcţii olomorfe (f, B) e (î, z), (f*, B*)e (f*, z*) astfel ca (f*, B%) să fie o prelungire analitică a lui (f, B) de-a-lungul lui y.
Atunci există un lanţ de prelungire ({f*, Bk) : k e 0, n) cu (f0, B0) — — (f, B), (£,., B^) = (4, Bn). Acest lanţ „realizează" prelungirea. Doi germeni sînt în prelungire analitică dacă există un drum y de-a lungul căruia unul să fie prelungirea celuilalt.
Relaţia de a fi în prelungire analitică este o relaţie de echivalenţă in X. Vom nota cu A(f,2)clasa de echivalenţă din care face parte (f, z). O astfel de clasă se numeşte suprafaţa riemanniană.
7.7. Observaţii. 1) Germenii fiind clase de echivalenţă doi germeni peste acelaşi punct z0 sînt fie egali, fie disjuncţi.
Dar germenii (f15 zt) şi (f2, z2) cu %# z2 nu sînt egali dar pot avea elemente comune. Dacă (f, B)e (f1? zx) n (fa> fe2) atunci (f1? zx) şi (î2, z2) sînt în prelungire analitică. Mai geeral, fie (f, z) şi (f*, z%) doi germeni în prelungire analitică iar ((f*, Bk); Jce 0, n) lanţul de funcţii olomorfe ce realizează prelungirea de-a lungul drumului y şi fie zk = y(tk). Ataşînd lui «t germenul (f*, zk) = xZk{îk, Bk) — (vezi figura 7.4)) — obţinem un „lanţ" de germeni (f0, s0),..., (f^, zk_x), (îk, zk).. .(fB, zn) cu proprietatea <f£, Bk) e (fj._1? ss,.^) n ( 4 , zk).
2) Putem alege din fiecare germen o funcţie olomorfă reprezentativă. într-adevăr, dacă (fl9 Bx), (f2, B2) e (f, z0) atunci fa şi f2 vor avea aceeaşi
co dezvoltare tayloriană în jurul lui z0: £ a.„(z— z0)
n. Atunci,* (s, U(z0; E)) 11=0
157
e un element particular („taylorian" ) din germenul (f, z^ unde B e raza de convergenţă a seriei iar s suma ei. B se numeşte raza de convergenţă a germenului şi germenul e univoc determinat de şirul de numere complexe ( ^ o , a0, O j , . . . . an, • • • i
7.8. Germenii unei funcţii analitice globale. Atît o funcţie globală i cît şi un germen (f, s) e o mulţime de funcţii olomorfe. Două elemente (f^Di), (f2, D2) din acelaşi germen (f, z), sînt totdeauna în prelungire.
Prin urmare, orice germen e inclus într-o funcţie globală î. Doi germeni sînt incluşi în aceeaşi funcţie globală atunci şi numai atunci cînd sînt în prelungire analitică. Prin urmare mulţimea tuturor germenilor incluşi în f formează o suprafaţă riemanniană pe care o vom nota cu Xt şi aplicaţia î ->• X{ e o bijecţie între mulţimea funcţiilor globale şi cea a suprafeţelor riemanniene. Putem ataşa acum lui f o funcţie f: -3Tf -» C, astfel: pentru orice (f0, m0) e Xt valoarea f(f0, z0) va fi prin definiţie valoarea germenului (vezi (7.6)) adică alegem (f1? Dj)e (f0, z0) arbitrar şi f(f0j»o) = = îxizg). Astfel i-am ataşat fiecărei funcţii globale i o funcţie definită pe suprafaţa riemanniană X{.
Fie f o funcţie globală şi (f, z) c î şi alegem un drum y din C cu y(0) = z. Dacă germenul poate fi prelungit de-alungul lui y, obţinem un alt germen inclus în î, deci un alt punct al suprafeţei riemanniene X{.
în caz contrar să urmărim ce împiedică realizarea prelungirii. Fie y un drum de-a lungul căruia (f0, z0) nu se poate prelungi şi notăm eu y( drumul y parcurs numai pînă lai0, adică y, {t) = y (t-t0). Mulţimea acelor valori t0e [0,1] pentru care (f0, £0) poate fi prelungit de-alungul lui y, e de forma [0, i*[cu 0 < t*. într-adevăr, dacă putem prelungi după yt atunci fie (f, z) germenul obţinut. Evident, z — y, (1) = y(i0). Dacă (f, D) e o funcţie olomorfă din germenul (f, z), atunci există un e e R+
astfel încît pentru t e [i0, t0 -f- e [să avem y(t) e B şi atunci (f, z) poate fi prelungit pe porţiunea dintre t0 şi t de pe drumul y, deci (f0, z0) poate fi prelungit pe y pînă la t.
Deci pe y se poate prelungi pînă la orice t e [0, ^[dar pînă la t^ nu mai e posibil — (vezi şi exemplul (7.5.1)). Vom spune în acest caz că z% = y (t%) este un punct singular al funcţiei globale f dacă se porneşte de la germenul (f0, z0) de-a lungul lui y. Trebuie subliniat că dîndu-se un punct z*e C nu se poate pune întrebarea dacă punctul este sau nu singular pentru f deoarece singularitatea depinde şi de drumul y şi de germenul de pornire (f0, z0) cu (z0= y(0)), z* poate fi singular pe un drum, iar pe altul nu.
Vom urmări acum problema unicităţii germenilor obţinuţi dintr-un germen dat prin prelungire. Vom constata că această unicitate e asigurată dacă se prelungeşte de-a lungul unui drum dat (vezi (7.9) şi (7.13)) şi chiar dacă avem două drumuri de prelungire dar acestea sînt omotope într-un anumit domeniu.
7.9. Teorema unicităţii prelungirii. Pentru un germen (f0, z0) şi un drum dat y din C există cel mult un germen (f*, z*) prelungire a lui (f0, s0) de-a lungul lui y.
Demonstraţie. Fie (f0, D0), (fx, DJ, . . . (f„, DB) şi (i0, D0),..., (îţ, î>$ două lanţuri ce realizează cîte o prelungire a lui (f0, z0) de-a lungul lui y pînă la germenii (f+, z*) respectiv (f*, %) şi să presupunem, prin absurd, că (f*, 0^)7^(4, %).
158

Avînd -{[tk-i,tk] <= Dk, definim pentru orice te[tk_lf tk) elementul (f„ y(t)) = xY«)(fs, î) t) si înmod analog pentru diviziunea corespunzătoare
' ' A A A •"* A
•celui de al doilea lanţ y[tk-.x,tk]cz Dk şi pentru te [tk_1} tk] definim (f„ Y(*)) = XyW(ft, ÂO. Avem (f0, y(0)) = (f0, y(0)) = (f0, *„), (fx, y(l)) = = (f*, 2*) ^ (f*, z*) = (fi, y(l)) Şi din ik \Gk = f ,;_11 Gk unde Gk=Dk_1 n D* rezultă că (f{, y(*)) Şi (ft, y(*)) s m t univoc definite. Notăm Jf0 = {te [ 0 , 1 ] : <f„ y(Z)) = (f„ Y(*))}. M1 = [0,1J\M0. Avem 0 e M0, 1 e M1 şi vom arăta •că Jf0 şi Mu sînt deschise în [0,1] în contradicţie cu conexitatea acestui interval.
Pentru orice t0 e [0,1] există k, j astfel ca t0 e [4-1, tk] n [fy_1? t,]. A Fie *0 e Jf0> adică (f<0, YOU) = ( \ , Y(*0))- După (7.6), funcţiile (ik, Dk)
şi (fj, Z>;) coincid într-o vecinătate D a lui y(t0), deci va exista e e R+ astfel •ea pentru t e ]t0 — s, t0 + z [ n [0,1] să avem y(£) e D şi atunci (f„ y(£)) = = (it, y(t)), adică ] t0 - £ , J 0 + s [ n [0,±]czM0. M0 e deschis. A A
Dacă keM-t, atunci (f(„, y(t0)) ^ (f,0, y(*o))> adică (f,„ D ^ ş i [i„ DA nu coincid în nici o vecinătate a lui z0=y(t0). Zerourile lui ik — î} fiind izolate, va exista o vecinătate punctată T7\{s;0} a lui z0 inclusă în Dk n D} în care ik(z) =£is(z) şi dacă t e ]t0 — s, t0 + e [ n [0,1] implică y(£) e F, vom avea <U, YOO) # (î« Y (<)), -^i e deschisă.
7.10. Corolar. -Fie (f, D) o funcţie olomorfă, z0, zxe D, (f, z0) = = xZo(f, J>), y MM cfomra din D ce leagă z0 de 03. Atunci (i, z), poate fi prelungit după y îa im germen {i±, zx), şi acesta coincide cu xZl(î, D).
într-adevăr, (f, D) singură formează un lanţ de prelungire a lui >^(f ,D)lax,1(f ,D).
7.11. Corolar. (Poincare). Fie (f0, zn) un germen şi z1 un punct oarecare al planului C. Mulţimea germenilor peste zx ce sînt în prelungire cu (f0, z0) e cel mult număr abilă.
Demonstraţie. De-a lungul unui drum y ce leagă y(0) = z0 de y(l) = — zxt prelungirea eunică. Dacă însă [ik, Dk) :Tce 0,n) e lanţul de prelungire ce realizează această prelungire putem trece cum am constatat la (7.5.4), la un alt drum poligonal y± cu vîrfurile diferite de y(0) şi y(l) raţionale de-a lungul căruia obţinem aceeaşi prelungire ca după y.
Deci, orice prelungire poate fi realizată prin drumuri poligonale cu vîrfurile intermediare raţionale. Mulţimea acestora e numărabilă.
7.12. Domenii de prelungire. Am văzut la (7.10), că dacă (f, D) e e (f, z) atunci oricare ar fi drumul y din D ce porneşte din z, (f, z) poate fi prelungit de-a lungul lui y. Să considerăm acum funcţia (f0, D0) din exemplul (7.5.2) şi construim germenul (f, 1) == v.x (f, D) format din toate funcţiile olomorfe (iu D±) pentru care l e ^ şi într-o vecinătate a lui 1, fx
. -iarg z coincide cu i0(z) = ]j\z\ e2. Sotînd cu D pe C\{0}, oricare ar fi drumul y din D cu y(0) = 1, germenul (f, 1) poate fi prelungit de-a lungul lui y. Totuşi acest domeniu D nu e domeniu de olomorfie pentru nici un element al germenului dat.
Fie (f0, zQ) e X un germen oarecare. Printr-un domeniu de prelungire pentru (f0, z0) înţelegem un domeniu D din C astfel ca z0 e D şi pentru orice drum y din D ce porneşte din z0 germenul poate fi prelungit de-a lungul lui y.
15?
De exemplu, oricare ar fi (f0, D0) e (f0, z0), D0 este domeniu de prelungire (vezi 7.10).
Dacă Y0, Yi sînt două drumuri dintr-un domeniu de prelungire, cu acelaşi punct final, prelungirile de-a lungul lor vor fi posibile, dar rezultatele pot fi diferite. în acest sens avem însă următorul rezultat fundamental.
7.13. Teorema monodromieL Dacă D e un domeniu de prelungire pentru germenul (f0, zQ) şi y0, Yi sînt două drumuri omotope în D, y0(0) = — Ti (0) = ^o; atunci germenii obţinuţi prin prelungire de-a lungul celor două drumuri sînt egali.
Demonstraţie. 1) Fie <p : [0,1]2^- D deformaţia lui y0 în yx. îfotînd Ys(t) = 9 (tj s)j vom arăta că pentru orice s e [0,1] există e e l + astfel ca pentru orice s'e [0,1] eu \s—s'\ <s, prelungirile lui (f0, z0) după ys şi Y«' dau acelaşi rezultat. Fie (f0, D0), (tu Dx), . . ., (fn, Dn) lanţul ce prelungeşte de-a lungul lui ys pe (fc, z0) şi 0 = t0 < ^ < . . . < t„ = 1 diviziunea corespunzătoare. Notăm rjlc = d (ys[4-i> hi,) Dk)) şi -q = min {rlk: h el„ n}. Avînd Y]€ R+ şi cp fiind uniform continuă va exista s e R ţ astfel ea \s—s'\ < < z să implice | <p(tf, s)— 9 (i, s')| < rj adică d(Ys(*)> Ys'OO) < Vt pentru t e [4-~i, hi de unde rezultă că Y/OO e -O* Şi lanţul dat de funcţii e o prelungire şi de-a lungul lui ys< şi clin cauza unicităţii prelungirii, pe y« şi y s , obţinem aceeaşi prelungire.
2) Să presupunem prin absurd că prelungirile de-a lungul lui y0 şi Yi dau rezultate diferite şi fie M0 mulţimea acelor valori se[0,1] pentru care prelungirea după ys coincide cu cea de-a lungul lui y0, iar Mx = = [ C , l ] \ ^ o - Proprietatea demonstrată la 1) arată că Mx şi M0 sînt deschise în [0,1] şi 0 e M0, 1 e Mu deci [0,1] nu ar fi conexă.
§ 2. SUPRAFEŢE RIEMANNIENE
7.1-1. Am definit relaţii de prelungire analitică la două nivele: în mulţimea f/f a tuturor funcţiilor olomorfe (f, D) uncie clasele de echivalenţă sînt funcţiile analitice globale şi la nivelul germenilor unde clasele ele echivalenţă defineau suprafeţele riemanniene. Cele două noţiuni erau în mod natural legate între ele: oricărei funcţii globale f i-am ataşat biunivoc o suprafaţă riemanniană Xs .
Spre deosebire de relaţia ele prelungire care contopeşte funcţiile olomorfe respectiv germenii într-o unitate organică mare, avînd rol de glo-balizare, relaţia ~So folosită la definirea germenilor are un roi de localizare concentrînd efectul unei funcţii olomorfe în jurul unui punct ales z0.
Trebuie subliniat însă că noţiunea dată pînă aici ca suprafaţă riemanniană este încă incompletă. într-adevăr, pentru a putea analiza comportarea funcţiei f : Xt -* C (continuitate, derivabilitate etc.) e necesar a înzestra mulţimea Xt cu o structură topologică şi de varietate diferen-ţiabilă, şi ele împreună formează suprafaţa riemanniană.
Cum Xt e o clasă de germeni, e util să ataşăm fiecărui (f, D) e 2? o mulţimede germeni astfel: Dt = {x2(f, D): z e D}. Dacă (f, J>) aparţine lui f atunci DfczXt .
7.15. Propoziţie. (Topologia suprafeţei riemanniene). Fie î o funcţie analitică globală. Mulţimea x formată din reuniri de mulţimi din familia §î = {Df : (f, D) e £} formează o topologie de spaţiu Hausdorff în Xţ
Î6Q
Demonstraţie. 1) Conform, definiţiei (7.11) (f, %) e Xt are loc atunci şi numai atunci cînd (f, ») <= f adică există (f, D) e f cu z e D şi y.z(i, B) = — (f, z), adică u {Dt e âS) = Xf . Deci X{ si în mod banal si 0 aparţin lui T.
2) Dacă Gu G2 e - atunci ^ == u { £ 4 : i e l } , G72 = U {£.,: j e J} cu Bt, Bj e 38 prin urmare Gx n G2 ~ U {5» n B}: (i, j) e I x </}. Pentru a arăta că (rx n G2 e T, adică ^ n 6?2 e o reunire de mulţimi din â? e suficient a arăta că pentru orice Bt, B}e M şi (f, z) e Bt n £ , există S e Sti astfel încît (f, . ' l e B c ^ n Bj. Fie deci Bi== Bt, B} = Dj unde (f, 0) , (f" î))e î. Cum (f, z)e Bf n i5 î ? avem z e D n -D şi (f, B) ~
A A * A A
~ s(f, Z>) deci există B = U(z ; r) astfel ca f| -D = f j B şi notînd cu f această restricţie vom avea (f, z) e B~ <= Dt n Bî . Deci 6^ n G2 e T.
3) Din definiţia lui T rezultă imediat că V 6rf e T implică U { e i : i e l } e T.
4) Să arătăm că spaţiul verifică axioma lui Hausdorff. Fie (f1} %), (f2, ?a) elemente distincte din Xt.
a) Dacă zx # 22 şi e = |#x—02| alegem cîte un element arbitrar din cei doi germeni (lv D\) e (f15 %), (f2, D2) e (f2, z2).jlvmd % e D1} 02 e D2, va exista sls s2 € Kţ astfel ca ex + £2 < e Şi -O* = C^*» e*) c Dk (ke iî~^2) şi notînd f» = f* | i)* vom avea (îk, Dk) e (îk, z*) şi din Z^ n 2>2 = 0 rezultă
(A^ n (fl^- = 0 .
Am găsit două vecinătăţi disjuncte pentru germenii aleşi. 6) Dacă % = «a, atunci (f1; %) şi (f2, 3a) vor fi disjuncte — (7.7.1) — .
Alegem (f,,-, Bk) e (îk, zk); va exista s e R* astfel ca î> = U(zx ; e)czD1 n B2 si notînd fk = fk \ D vom avea (ik, D) e (ik1 zk). Atunci însă (Z>)~ şi (J3)f~ sînt vecinătăţi disjuncte ale germenilor (L, zx) respectiv (f2, z2) deoarece din (î,z)e (D)~ n (B)j ar rezulta (fs, 5 ) e (f, 0), deci (f1;î>) şi (f2, D) coincid pe vecinătatea îui zeB. Atunci, însă, {f1: D) = (f2, B) şi germenii daţi n-ar fi disjuncţi.
Structura topologică din Xt permite definirea continuităţii unei aplicaţii F : Xt -> C. Pentru a putea vorbi de diferenţiabilitate avem nevoie însă de o structură suplimentară pe suprafaţa riemanniană. Această structură va fi realizată prin transportarea structurii de corp din C pe Xf. Acest transport e realizat cu ajutorul operaţiei de proiecţie pr : Xt -* C, dar vom avea nevoie şi de inversa ei. Proiecţia nefiind injectivă, va trebui să folosim o restricţie de a ei.
7.16. Propoziţie. Fie (Xt , T) O suprafaţă riemanniană şi (î, B) e f. Restricţia proiecţiei ia mulţimea Dt e un omeomorfism mire Dt şi B. Prin urmare (Xt , T) e local compact şi conex prin arce.
Demonstraţie. 1) Evident, fiecărui z e D îi corespunde exact un germen (f, z) e Dt al cărui proiecţie e z, deci p = pr |D, este o bijecţie între J)£ şi B.
2) p e continuă. Fie G o parte deschisă din D, deci şi în C. Componentele ei vor fi domenii: G = U {B}: j e 1} deci pr^1 G = U {pr-1 D}: jeI} .Dar pr_1D^ e deschisă înX s , deoarece notînd cu % restricţia lui f ia Dh avem (f;, D}) e Xt şi pr-1D ; î= \Pi)tj s 3$. Prin urmare pr - 1 G e T.
161 1! _ c . 603

3) p e deschisă. E suficient să arătăm că dacă B e ăS, atunci pr("P n n Bt) e euclidian deschis. Fie B = BŢ şi zx e pr(J5~ n Dt). Va exista deci (fi, »i)e J5/ nX>/; dar atunci z1eB n D şi pentru un D = C (%; r t)
A ^__ A ' •>, A A
convenabil vom avea B <= Z> n Z) iar f ID == f I D. Xotînd cu f această A A -N. ^
restricţie vom avea în mod evident xj (f, D)= xj (f, D) = xj (f, D) pentru A A A A ^
orice se B. Acest germen (f, z) aparţine deci atît lui A cît şi lui Df şi atunci ze pr (Î5ţ n -OJ deeil? e inclus în această proiecţie ceea ce demonstrează» că pr (Bt n A ) e deschisă.
4) Mulţimea B e local compactă în topologia planului complex, deci şi Bt e local compact, prin urmare întregul spaţiu (Xt , -r) de asemeni.
o) Fie (f, 0), (f*, 2f#) două elemente arbitrare ale suprafeţei riemanniene Xt. Ele fiind în prelungire, va exista un lanţ de prelungire ((f.,, Bk) : Jc e e 0, n un drum y şi o diviziune A = (t0, tt ... £„) pentru care <( e [**_i, **] implică f(t)eBk. Considerăm acum descompunerea (yl5 . . . , y j a drumului y după diviziunea A. Vom avea {y*} <= Bk, y1 (0) = .î1, y,,(l)= 2*. Proiecţia fiind un omeomorfism între (Bk)t% şi l>t, y/V= pr -1 o y/; va fi un drum din (IMf*, şi există drumul y = Yi U . . . U f„ cu {y} <= Ar„ y(0) = =(f,«), y ( l )= (f*^*) Şi -Zf e conex prin arce. Operaţia de trecere de la y4- din plan la drumul y,: de pe suprafaţa riemanniană (mai precis pe ramura ei (Bk)iM se numeşte ,,ridicare*'.
7.17. Observaţii. 1) în teoria varietăţilor diferenţiabile printr-o hartă se înţelege o aplicaţie omeomoriă a unei părţi deschise G dintr-un spaţiu topologic (X, T) pe o parte deschisă din planul complex, iar o mulţ i m e a = {G( : i e 1} de hărţi cu proprietatea U {6?,- : i e 1} = Ase numeşte-atlas.
Aplicaţia pr defineşte după cum am văzut un atlas pe suprafaţa riemanniană Xs şi :M = [Bf : (f, B) e î} e mulţimea hărţilor.
2) Din (7.11) deducem că o suprafaţă riemanniană are cel mult o mulţime numărabilă de ,,foi" adică elemente cu aceeaşi proiecţie.
3) Se pot defini şi suprafeţe riemanniene compacte adăugind spaţiilor construite, din germeni elemente improprii: poli, puncte de ramificaţie.
-4) Suprafeţele riemanniene pot fi intuite şi ca suprafeţe scufundate în R3. Fiecărui ze € îi suprapunem vertical atîtea puncte cîte elemente
distincte se obţin peste 2 prin prelungire şi legăm între ele aceste puncte, care sint în „continuare" în sensul topologiei. La exemplul (7.5.2), vom ajunge la suprafaţa clin figură, obţinură prin tăierea de-alungul semidreptei OA a două exemplare din C\{0} şi lipirea muchiilor opuse. Dreapta GA e in B3
comună, dar pe suprafaţa riemanniană aceste puncte trebuie considerate dublu.
Fig. 7.17.4 7.18. Funcţii pe suprafaţa riemanniană. Dacă Xi e suprafaţa rieman
niană a funcţiei globale f, atunci acesteia i-ani ataşat o funcţie f : X% -> C, Există şi alte funcţii complexe definitepe suprafaţa riemanniană Xt .Putem ataşa de exemplu unei alte funcţii globale g o funcţie din X% în C dacă ea
162
îndeplineşte următoarea condiţie : există o aplicaţie continuă o : Xt -> Xg care conservă proiecţiile, adică pentru orice (f, z) e Xt să avem pr a(î, z) = z. î n acest caz spunem că î e sihborăonat lui g şi ataşăm lui g următoarea fancţie gi : Xt -*• C definită de gi = g° a. în acest caz vor exista şi funcţiile ! + g"î , î-îjî din Xs în C.
De exemplu, t e subordonată oricărei funcţii globale întregi li (adică h admite un element (li, C) şi atunci h e format din restricţiile lui h la diferitele domenii din C). într-adevăr, Xt va fi evident omeomorf cu planul C şi dacă îl identificăm chiar cu C, atunci c = pr va fi funcţia de subordonare. Deci c e unic determinată. .
Fie acum î funcţia globală generată de aplicaţia multivocă Log şi fj cea generată de ]fz i e subordonată lui g dar a poate fi ales în două feluri. Fie (f,.«) 6 î, prin urmare z # 0 şi valoarea germenului în z este In | z | -f i (arg z -+- 2fc7u). Atunci cr(f, z) va fi de exemplu acel germen (g, z)
pentru care valoarea lui (g, z) în z este ][\z\ e2 = dacă/c epar. Dacă 7;
e impar alegem germenul cu valoarea fj^j-e3 v . (Sau invers) 4
Funcţia globală generată de fz e subordonată celei generate de }[z,
dar nu e subordonată funcţiei globale generată de ][z. Fie acum X o suprafaţă riemanniană, iar F o aplicaţie oarecare de
finită pe X cu valori în C. O astfel de funcţie se spune a fi analitică dacă pentru orice (f, s) e X şi orice (f, B) e (f, z) funcţia F o p ^ : D ^ C e deriva-bilă în z (am notat cup restricţia proiecţiei la D{). Se vede imediat că F fiind analitică e şi continuă, iar dacă X e suprafaţa riemanniană a unei funcţii întregi, atunci F e analitică dacă şi numai dacă e o funcţie întreagă.
Se verifică uşor că dacă î e subordonată lui g atunci g$ e o funcţie analitică pe Xi ,

i N D E X
A
aplicaţie local constantă . . .3.23. aplicaţie logaritmică 2.85. argumentul unui număr comp-
plex 1.16. 1.25. atlas 7.17. 1. automorfism conform . . . .6.21.
biraportul a patru numere . . .2.69
C
calcularea reziduului într-un pol 5.3. cercul lui Kasner 2.92. coeficienţii Laurent 4.29. coeficienţii Taylor 4.11 comportarea la CO 4.53. compunerea a două drumuri . .2.9 conform echivalente (domenii) .6.21. conjugatul unui număr com
plex 1.6. contur 3.1, convergenţa în sens Cauehy . 5.7. convergenţa uniformă pe com
pacte 4.1. coroană circulară 1.36. coroană de convergenţă . . . .4.29. corp valuat 1.9. criteriu de convergentă uniformă. 4.5. criteriul lui Cauehy-Riemann
de eliminabilitate 4.43. curbă 2.22
deformatie continuă diferenţiala exterioară . , disc disc de convergentă . . discul unitate
distanţa între două mulţi divizibilitate . . . .
domeniu simplu conex domeniu de prelungire . domeniu stelat . . . .
mi
. .2.7. , .3.39. . .1.36 . .4.8. . .6.24. . .1.48. . .1.36. , .5.19.
.1.36.
.1.36.
.2.20.
.7.12.
.1.36.
drum 2.7. drumuri echivalente . . . 2.22. drumuri omotope 2.7. drum poligonal 2.18. drum rectificabil 3.1. drum triunghiular 3.11.5.
E
echicontinuă 6.1 .
F
formă diferenţială 3.39. formă diferenţială exactă . . .3.46. formă diferenţială închisă . . .3.47.. formă diferenţială local exactă 3.47. formulele lui Cauehy . . . . 3.25. formulele lui Cauehy pentru
disc 3.19-îormula lui Cauchy-Hadamard 4.8. formula lui Poisson 3.32. formula lui Schwarz 3.35. formulele integrale ale lui Pom-
peiu 3.62. funcţie analitică 4.13. funcţie analitică globală . . .7.11 funcţie armonică 3.26. funcţie armonică conjugată . .3.27.1 funcţie derivabiiă 2.28. funcţie ciiferenţiabilă 2.26, 2.45,. funcţie dezvoltabilă 5n scrie
Taylor 4.13. funcţie elementară 2.87. funcţie exponenţială 2.53. funcţie globală 7.1. funcţie generată de o aplicaţie
multivoeâ 7.5. funcţie întreagă , 2.44, 4.53. funcţie local constantă . . . .3.23, 7.18. funcţie olomorfă 2.44. funcţie raţională 4.56. funcţie subordonată 7.18. funcţie trigonometrică . . . .2.61.. funcţie trigonometrică hiper
bolică 2.64. funcţie univalentă 6.11.
164
a o germeni de funcţii analitice 7.6. generalizări ale teoremei lui
Caachy 3.60. grup conform 6.21.
H
hartă 1.41,7.17.1.
I
index 3.23. inegalităţile lui Cauchy . . . .3.28. inegalitatea triunghiului . . .1.8. integrala complexă 3.6. integrala pe un drum de clasa C1 3.40. integrale de tip Cauchy . . . .3.18. integralele lui Fresnel . . . .5.12. integralele lui Poisson 5.12. integrala Stieltjes-Ricmann . 3.3. inversul unui drum 2.14. izomorfism conform . . . . 6.21.
lanţ 3.65, lanţuri închise omoloage . . .3.65. lanţ de prelungire 7.1. legea paralelogramului . . . .1.13. Ierna integralelor de tip Cauchy .3.18. Ierna Ini Jordan 5.8. Ierna lui Schwarz 4.26. Ierna lui Weierstrass 4.3. limita unei funcţii 2.5.
M
mărginită 6.3. modelul lui Poincare 2.96. modulul unui număr complex .1.6. mulţime compactă 1.36. mulţime conexă 1.36. mulţime echicontinuă de funcţii 6.1. mulţime de funcţii 6.1. mulţime mărginită 1.36. mulţime mărginită de funcţii .6.3. mulţime relativ compactă de
funcţii 6.7.
?:
omotop cu zero 2.16,-ordinul unei funcţii meromorîe
într-un domeniu 5.19. ordinul unui pol 4.49. ordinul unui punct 5.19. ordinul unui zero 4.16.
V
partea imaginară 1.6,2.2.-partea principală 4.29. partea reală 1.6,2.2. partea tayloriană 4.29. planul complex 1.35. planul complex extins . . .1 39. pol 4.45. Poisson-Schwarz 4.19. prelungire analitică a funcţiilor 7.1. prelungire directă 7.1. prelungire de-a lungul unui
drum 7.4. prelungire a germenilor . . .7.6. prelungire olomorfă 4.22, 7.1, primitiva 3.9. primitiva unei forme diferen
ţiale 3.46. primitiva unei forme închise cle-a
lungul unui drum 3.50. principiul prelungirii olomorfe 4.22. problema reprezentării conforme 6.21.. proiecţia unui germen . . . .7.6. proiecţia stereografică 1.44. punct de acumulare de poli . .4.50. punct eliminabil 4.37. punct esenţial 4.45. punct final 1.3G. punct fix atractiv 2.80. punct fix indiferent 2.80. punct fix repulsiv 2.80. punct iniţial 1.35. punct izolat 1.36. punctul de la infinit . . . .1.39. punct regular 4.37-punct singular al funcţiei
globale 7.S. punct singular izolat . . . .4.37.
5i
număr complex .1.1. ramura uniformă raza conformă . .6.29.
165

Tază de convergenţă . . . .4.8. rază de convergenţă a unui
germen 7.72. relativ compactă 6.7. relaţiile lui Cauchy-Riemann .2.32. relaţiile lui Cauchy-Riemann în
coordonate polare 2.8G. relaţia de omologie 3.65. relaţia de omotopie 2.7. reprezentarea conformă . . .6.21. reprezentarea trigonometrică a
numerelor complexe . . . .1.29. reziduu 4.41. ridicarea unui drum . . . .7.16.
sector unghiular 1.36. seria binomială 4.15.4. seri: de funcţii 4.5. seria geometrică 4.9.5. seria Laurent 4.29. serii de puteri 4.7. serii Taylor 4.11. sfera lui Riemann 1.47. spaţiu metric complet . . . . 1.36. suportul unei funcţii globale . .7.6. suprafaţă riemanniană . . .7.0. şiruri de funcţii olomorfe . . .1.1.
oiomorfe 4.20. teorema indexului 3.24. teorema lui Abel 1.7. teorema lui Casorati-Weierstrass 4.52. teorema lui Cauchy . . . .3.15. teorema lui Cauchy pentru tri
unghiuri 3.12. teorema lui Cauchy-Riemann 2.30. teorema lui Hurwitz 6.20. teorema iui Liouville 3.29. teorema lui Montei 6.S. teorema lui Morera 3.20. teorema lui Poincare 7.11. teorema lui Riemann . . . ,6.27. teorema lui Rouche 5.26. teorema lui Vitali 6.10. teorema lui "Weierstrass , . . .4.4. teorema maximului modulului 4.23. teorema monodromiei . . . .7.13. teorema ramurilor uniforme . ..3.22 teorema reziduurilor . . . .5.1. teorema unicităţii prelungirii. . 7.9. teorema variaţiei argumentului 5.24. teorema zerourilor funcţiilor
olomorfe 4.19. topologia suprafeţei riemanniene7.14., transformări conforme . . . .2.88. transformarea lui Jukowski . .2.84. transformări Mellin 5.16.
teorema analiticităţii funcţiilor olomorfe 4.14.
teorema coroanei ele convergenţă 4.29. teorema de invariantă a dome
niului 5.28. teorema de legătură dintre pri
mitivă şi integrală 3.10. teorema dezvoltării in serie
Taylor 4.11. teorema discului de conver
genţă 4.8. teorema fundamentală a alge
brei 3.31., 5.27.: teorema identităţii coeficien
ţilor 4.10., 4.30. teorema identităţii funcţiilor
unghiul dintre două drepte .1.36.
valoarea principală a unei integrale 3.37.
valoarea principală Cauchy . .5.7. valoarea unui germen . . . .7.6. variaţia pe o diviziune . . . .3.1. variaţia totală 3.1. versiunea globală a teoremei lui
Cauchy 3.66.
zero 2,44., 4.16., 4.42,
166
B I B L I O G R A F I E
1. A li 1 f o r s L. V. : Complex Anahjsis. Mc Graw-HiH New York 1366 2. A n g h e 1 u ţ ă T h. : Curs de teoria funcţiilor de variabilă complexă. Editura
tehnică, Bucureşti, 1957 3. B e h n k e II , — S o m m e r F . : Theorie der analylischen Funktionen einer
komplcxen Verânderlichen. Springer Verlag, Berlin, 1965 4. B c n k ii I: Funcţii complexe. Teoria diferenţială. Universitatea din Bra
şov, 1974 5. B i e b e r b a e h I. : Anahjtische Fortsetzung, Springer Verlag, Berlin, 1955 6. B o b o c X- : Funcţii complexe. Editura didactică şi pedagogică, Bucu
reşti, 1969 7. C ă 1 u g ă r e a n u G h. : Elemente de teoria funcţiilor de o variabilă complexă.
Editura didactică şi pedagogică, Bucureşti, 1963 8. C a r t a n II. : Theorie elementaire des foctions analijilques d'unc ou p'usieurs
variables complexes, Hermann, Paris, 1961 9. C o n w a y J. B. : Functions of one complexe variable, Springer Verlag,
Berlin, 1973 10. C o s t i n e s c u O. : Elmemente de topologie generală, Editura tehnică, Bucu
reşti, 1969 11. D i e u d o n n e J. : Foundations of Modern Anahjsis, Academie Press, New
York, 1960 12. E m â n u el D. : Lecliuni de teoria funcţiilor, Editura Scrisul Românesc,
Bucureşti, 1924 13. E v g r a f o v M. A. (şi a . ) : Sbcrnic zadaci po teorii analiliceschih funcţii,
Izd. Xauka, Moscova, 1972 14. G h e o r g h i u X-, P r e c u p a n u T. : Analiza matematică. Editura didac
tică şi pedagogică, Bucureşti, 1979 15. H a rn b u r g P. : Introducere in topologia generală, Rcprografia Universităţii
Craiova, 1971 16. H u r w i t z A.. C o u r a n t R. : Yorlesuiigen liber allgemeine Funktions-
theorie und elliptische Funklionen. Springer Verlag, Berlin, 1964 17. K e s s 1 e r P. : Curs de matematici superioare. Parteaa 11-a Analiză complexă,
Reprografia Universităţii Craiova, 1976 18. L a n g S. : Complex Analysis, Addison — Wesley, Reading, 1977 19. M a r k u ş e v i c i A. I. : Teoria analiliceschih funcţii, Izd. Tehnikescoi
lit. Moscova, 1950 20. M a y e r O c t a v : Teoria funcţiilor de o variabilă complexă,
Editura Academiei, Bucureşti, 1981.
"21. M.E.I. : Analiză matematică, voi. I, II, Editura didactică şi pedagogică, Bucureşti, 1980
22. M o c a n u Gh . , S t o i a n G h., V i ş i n e s c u E . : Teoria funcţiilor de o variabilă complexă. Culegere de probleme. Editura didactică şi pedagogică Bucureşti, 1970
23. N e g o e s c u G h . : Funcţii complexe, Litografia Universităţii Iaşi, 1983 24. M o c a n i P. : Funcţii complexe, Litografia Universităţii Cluj, 1972 25. P r e c u p a n u A. : Analiză matematică. Funcţii reale, Editura didactică
şi pedagogică, Bucureşti, 1975 26. S t o i 1 o w S. : Teoria funcţiilor de o variabilă complexă, voi. I, II, Editura
Academiei, Bucureşti, 1954 — 58 27. S z o k e f a l v i — N a g y B. : Komplex fiiggvenytan, Tankonyv kiadb, Buda-
pest, 1972 28. V o l k o v i s k i i L. L, L u n ţ G. L., A r a m a n o v i c i I. G. : Sbornic
zadaci po teorii funcţii complexnogo peremenogo, Izdat. Fiziko-niateraa-ticeskoi literaturi, Moscova, 1961
Plan editură Nr. 9057
Coli de t ipar ; 10,50
Bun de t i pa r ; septembrie 1982
_,, C. 6 0 3 - 1 . P. „INFORMAŢIA' jlîj Str. Brezoianu Nr. 23 — 25
Saăj Bucureşti





























