Embed Size (px)
Citation preview

Universidade Federal do Espírito Santo
Curso de Pós-graduação emCálculo Estrutural e Fundações
Realização:Centro Tecnológico – UFESCoordenador: Prof. Dr. Élcio Cassimiro Alves
Universidade Federal do Espírito Santo
Curso de Pós-graduação emCálculo Estrutural e Fundações
1º módulo:Análise Matricial de Estrutura
Prof. Dr. Élcio Cassimiro Alves
Plano de Disciplina• Histórico• Formulação de Matriz de Rigidez de Barra• Problema Envolvendo Carregamento Geral• Exemplos de Análise
– Exemplo 1 – Viga– Exemplo 2 – Treliça– Exemplo 3 – Pórtico
• Problemas envolvendo Variação de Temperatura• Aplicação – Ftool.• Instabilidade Estrutural
– Processo gz
– Processo P-D

Referências Bibliográficas
• ABNT – NBR 6118-2007 – Procedimentos de Cálculo de Estruturas de Concreto Armado.
• Freitas Neto, José de Almeida; Vieira, Inaldo Ayres, ‘Análise Matricial de Estruturas’, 1975.
• Farias, Antônio de, ‘Notas de Aula’, USP São Carlos.• Ftool, ‘Manual Prático’ – Puc-Rio;• Martha, Luiz Fernando, “Analise de Estruturas’, Elsewier, 2010;
HistóricoMétodo dos Elementos Finitos (Clough – 1960 – Nomeclatura)Courant 1941 –primeiro a propor o MEF como ele é conhecido – Baseado no Princípio da Energia Potencial e funções de interpolação.
Origem nos Métodos de Análise Estrutural (Análise Matricial ) – Década de 50;
Fator Importante – Desenvolvimento dos computadores digitaisPórticosTreliças1953 engenheiros formulam equações de rigidez na forma
matricial resolvendo sistema de 100 graus de liberdade.
HistóricoCom o passar dos tempos e necessidades
Industria AeronáuticaNavalDesenvolvimento dos Métodos Numéricos
Pioneiros
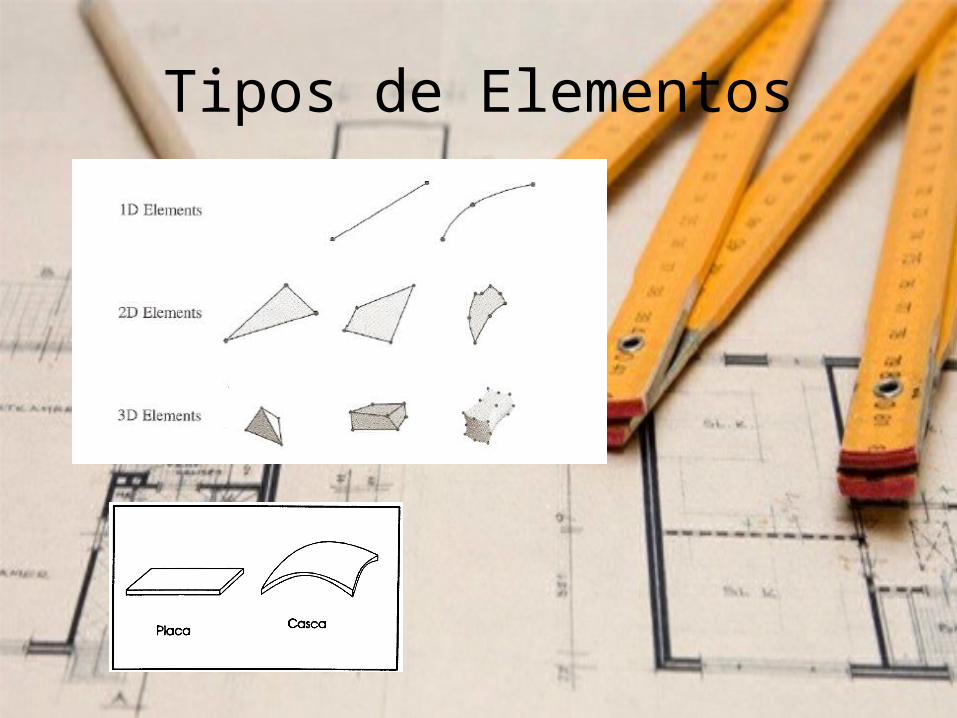
Tipos de Elementos

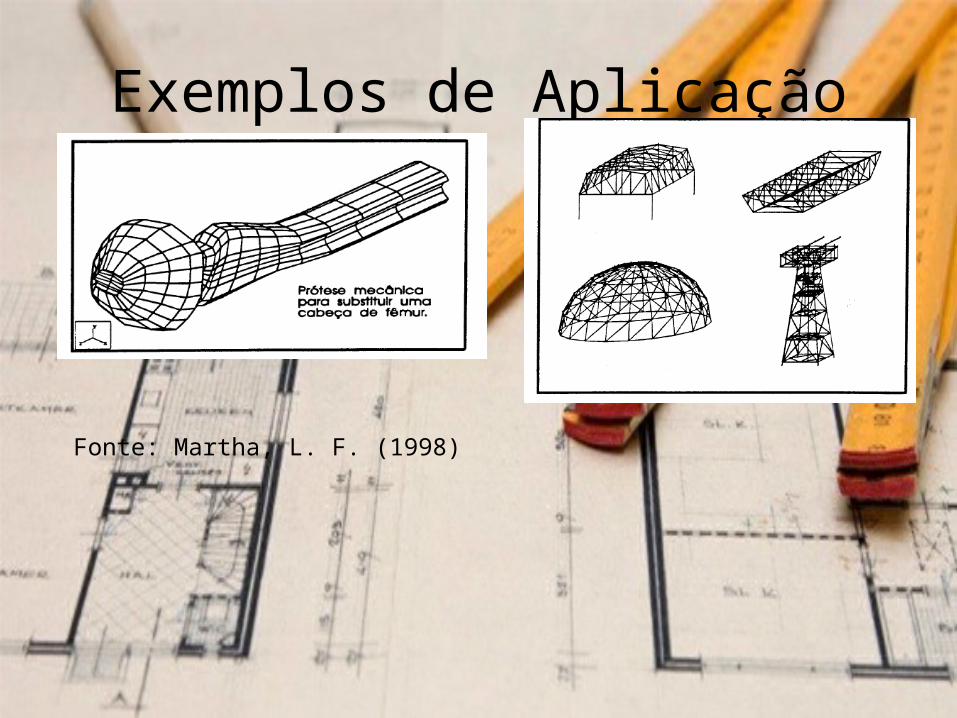
Exemplos de Aplicação
Fonte: Lotti, R. S. , Machado, A. S. , Mazziero, E. T., Landre Jr., J.
Exemplos de Aplicação
Fonte: Martha, L. F. (1998)
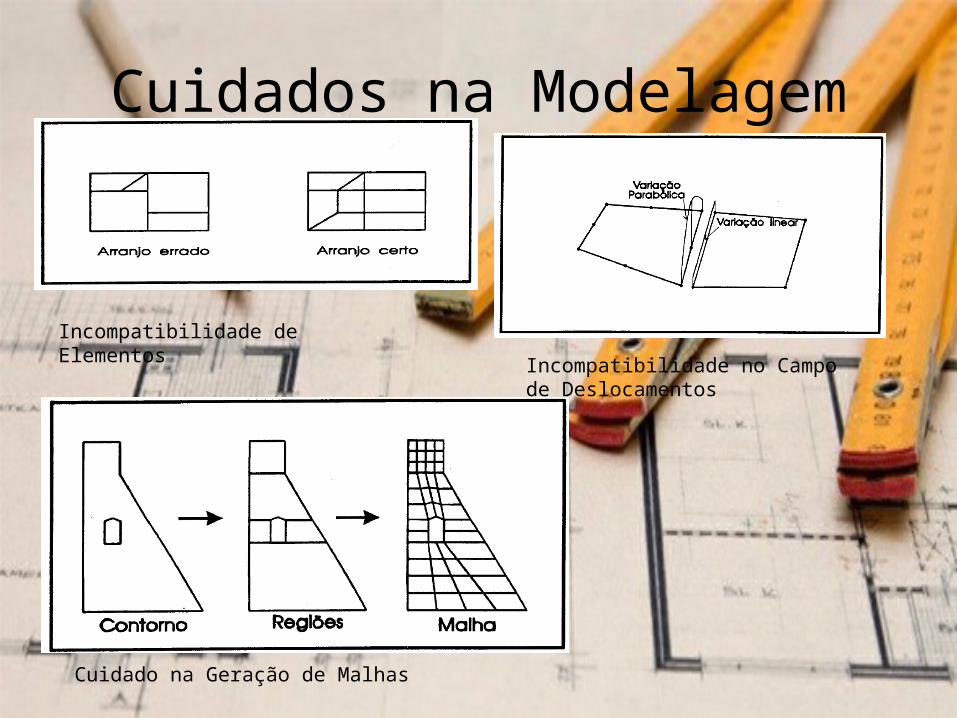
Cuidados na Modelagem
Incompatibilidade de Elementos
Incompatibilidade no Campo de Deslocamentos
Cuidado na Geração de Malhas
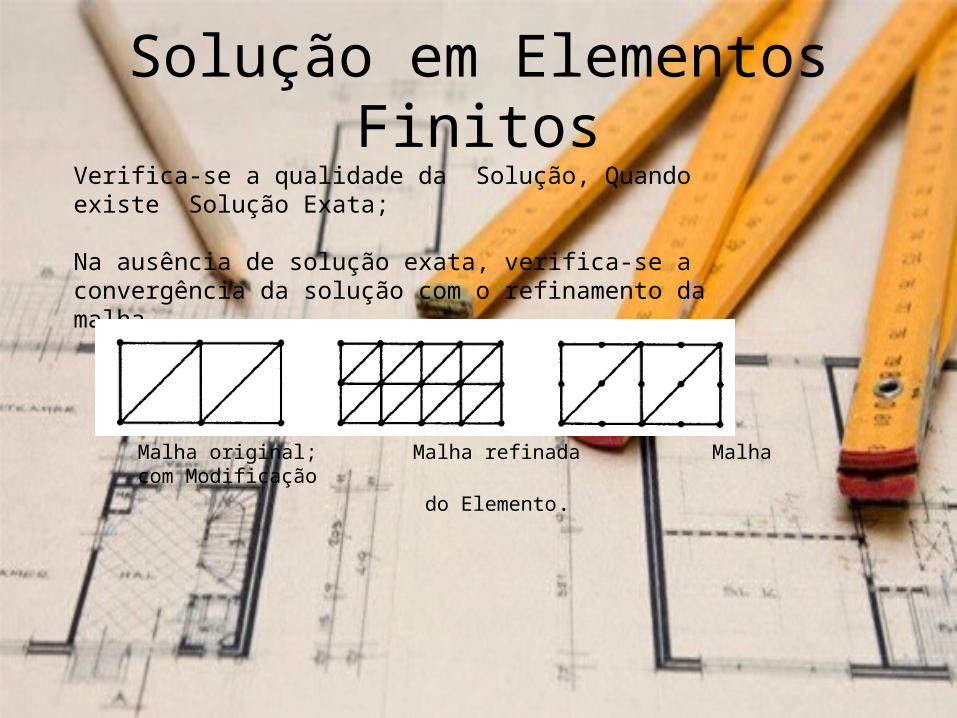
Solução em Elementos FinitosVerifica-se a qualidade da Solução, Quando existe Solução Exata;
Na ausência de solução exata, verifica-se a convergência da solução com o refinamento da malha.
Malha original; Malha refinada Malha com Modificação do Elemento.
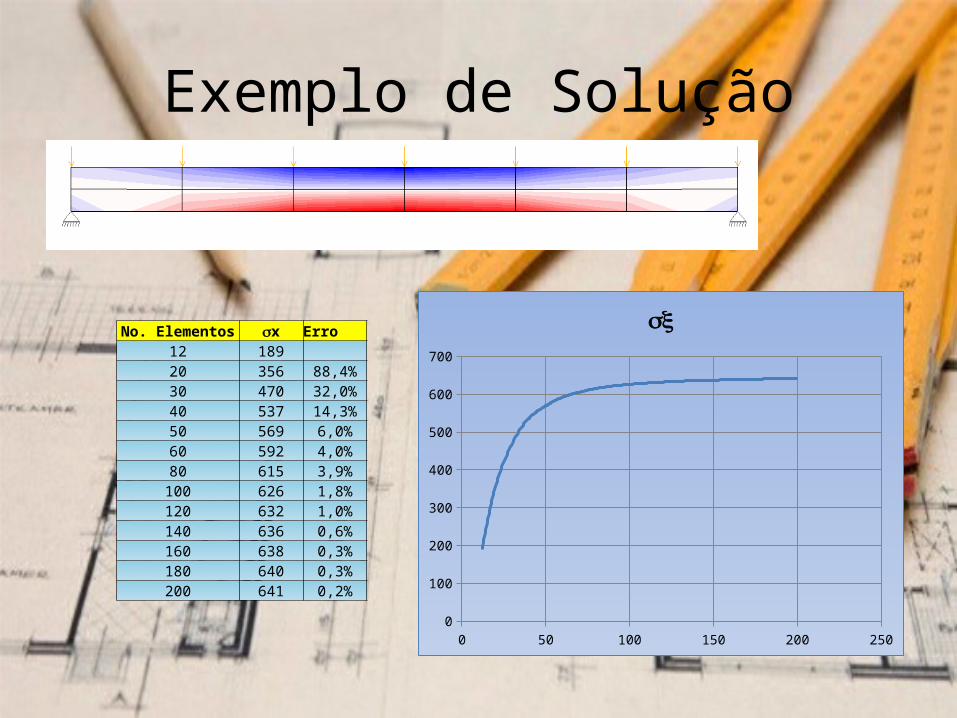
Exemplo de Solução
No. Elementos sx Erro12 189 20 356 88,4%30 470 32,0%40 537 14,3%50 569 6,0%60 592 4,0%80 615 3,9%
100 626 1,8%120 632 1,0%140 636 0,6%160 638 0,3%180 640 0,3%200 641 0,2%
0 50 100 150 200 2500
100
200
300
400
500
600
700
sx
F1F2
M2M1
L
d1=1
L
q2=1
L
d2=1
k11
k21
k31
k41
k42
L
q1=1
k12
k22
k32
k33k13
k23k43
k34k14
k44
k24
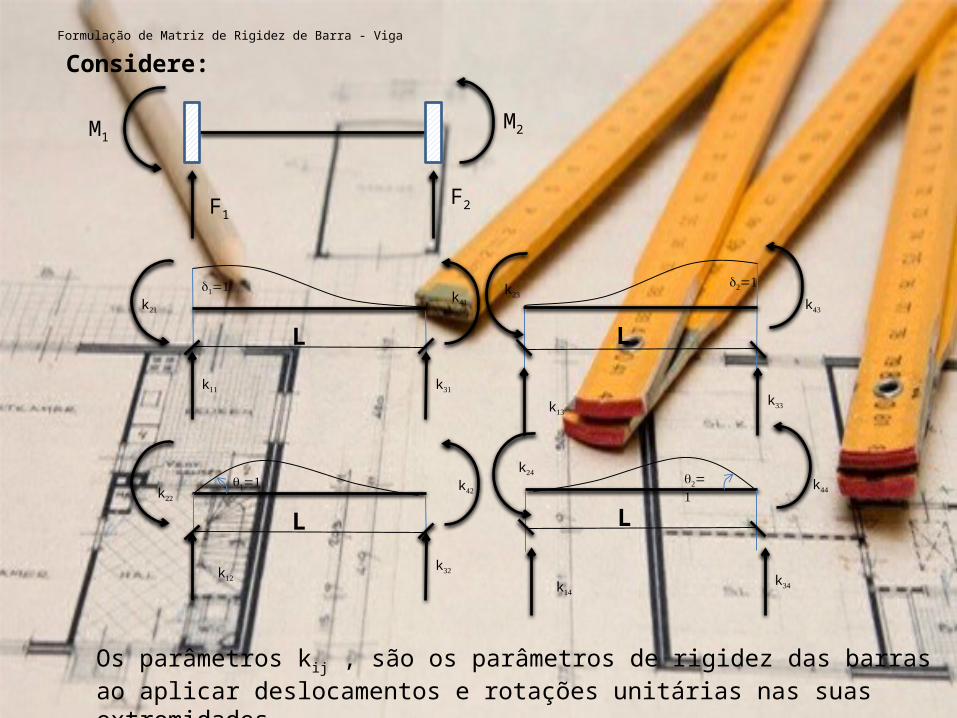
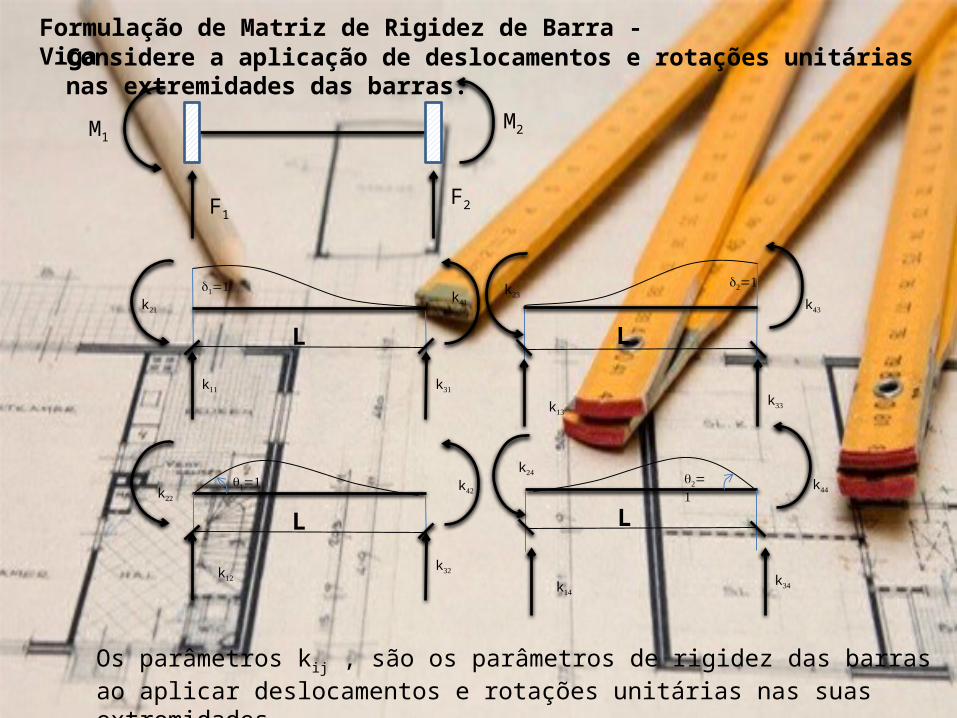
Os parâmetros kij , são os parâmetros de rigidez das barras ao aplicar deslocamentos e rotações unitárias nas suas extremidades
Considere:Formulação de Matriz de Rigidez de Barra - Viga
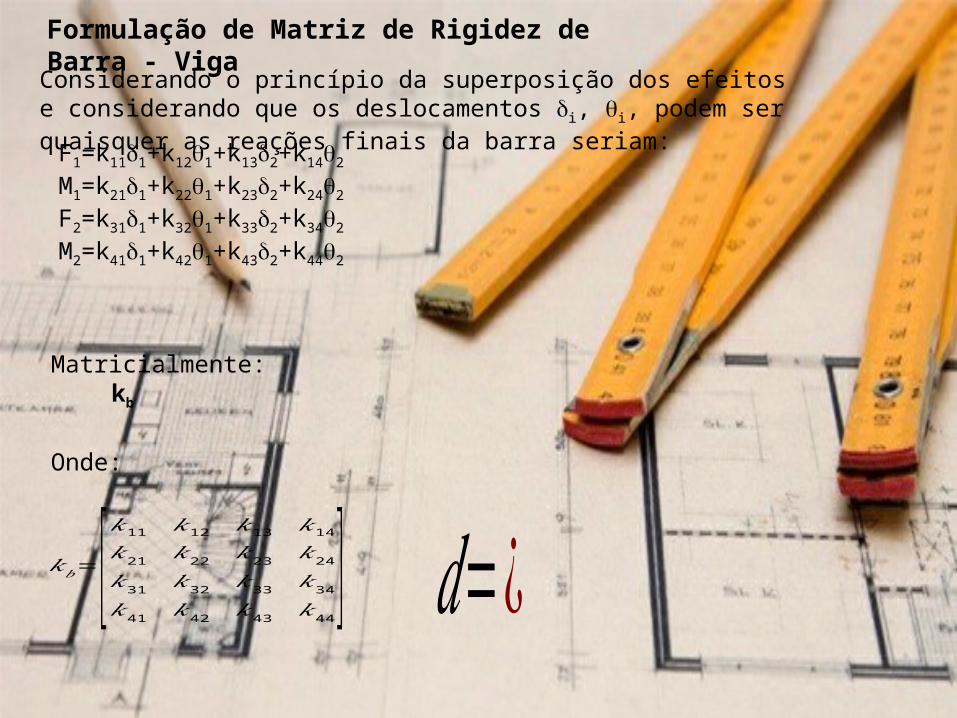
Considerando o princípio da superposição dos efeitos e considerando que os deslocamentos di, qi, podem ser quaisquer as reações finais da barra seriam:
F1=k11d1+k12q1+k13d2+k14q2
M1=k21d1+k22q1+k23d2+k24q2
F2=k31d1+k32q1+k33d2+k34q2
M2=k41d1+k42q1+k43d2+k44q2
Matricialmente:kb
𝑘𝑏=[𝑘11 𝑘12
𝑘21 𝑘22
𝑘13 𝑘14
𝑘23 𝑘24
𝑘31 𝑘32
𝑘41 𝑘42
𝑘33 𝑘34
𝑘43 𝑘44] 𝑑=¿
Onde:
Formulação de Matriz de Rigidez de Barra - Viga
F1F2
M2M1
L
d1=1
L
q2=1
L
d2=1
k11
k21
k31
k41
L
q1=1
k12
k22k42
k32
k33k13
k23k43
k34k14
k44
k24
Os parâmetros kij , são os parâmetros de rigidez das barras ao aplicar deslocamentos e rotações unitárias nas suas extremidades
Considere a aplicação de deslocamentos e rotações unitárias nas extremidades das barras:
Formulação de Matriz de Rigidez de Barra - Viga
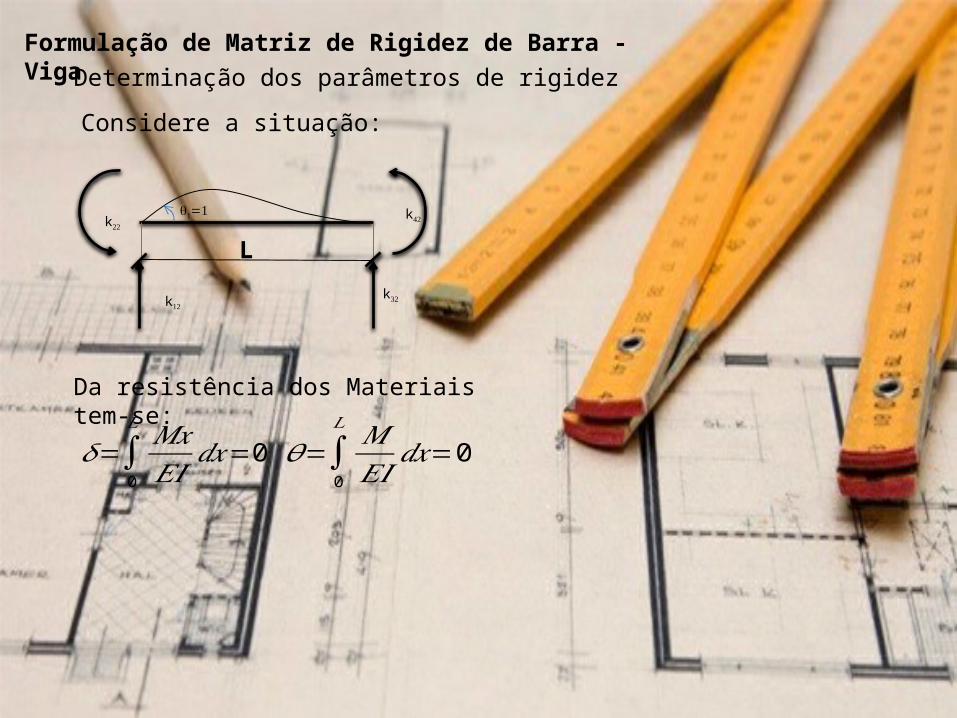
Determinação dos parâmetros de rigidez
Considere a situação:
L
q1=1
k12
k22k42
k32
Da resistência dos Materiais tem-se:
𝛿=∫0
𝐿𝑀𝑥𝐸𝐼
𝑑𝑥=0𝜃=∫0
𝐿𝑀𝐸𝐼
𝑑𝑥=0
Formulação de Matriz de Rigidez de Barra - Viga
F1F2
M2M1
M
M1
M2
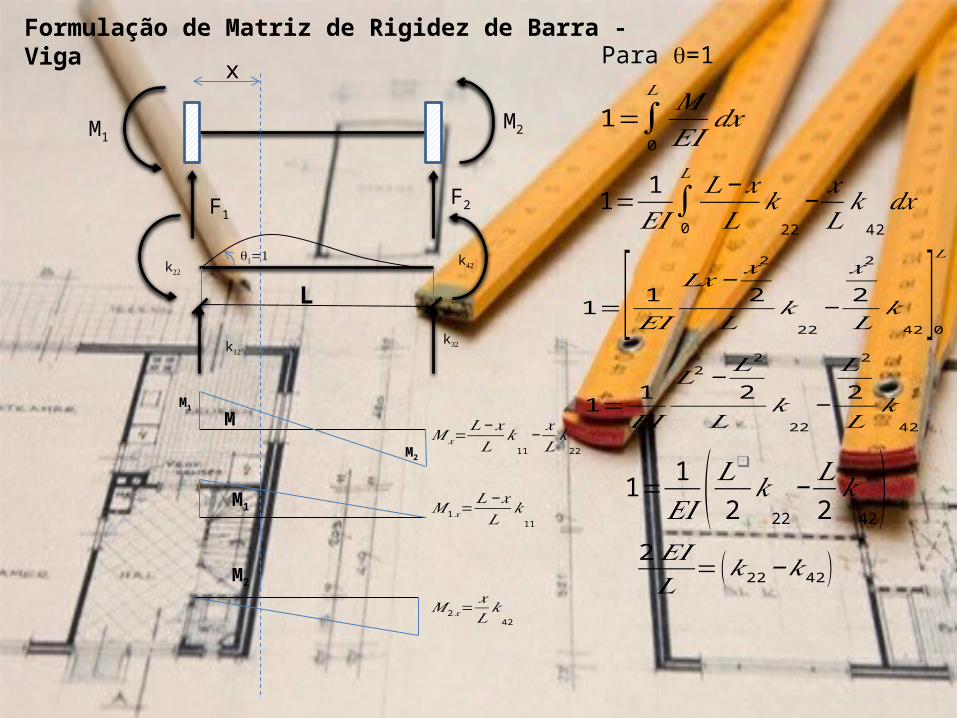
𝑀 1𝑥=𝐿−𝑥𝐿
𝑘11
𝑀 2𝑥=𝑥𝐿𝑘
42
𝑀 𝑥=𝐿− 𝑥𝐿
𝑘11
−𝑥𝐿𝑘
22
M1
M2
1=∫0
𝐿𝑀𝐸𝐼
𝑑𝑥
Para q=1
1= 1𝐸𝐼∫0
𝐿𝐿−𝑥𝐿
𝑘22
−𝑥𝐿𝑘
4 2
𝑑𝑥
L
q1=1
k12
k22
k32
x
1=[ 1𝐸𝐼
𝐿𝑥−𝑥2
2𝐿
𝑘22
−
𝑥2
2𝐿𝑘
42]
0
𝐿
1= 1𝐸𝐼
𝐿2−𝐿2
2𝐿
𝑘22
−
𝐿2
2𝐿𝑘
42
1= 1𝐸𝐼 ( 𝐿
❑
2𝑘
22
−𝐿2𝑘
42)
2𝐸𝐼𝐿
=(𝑘22−𝑘42 )
Formulação de Matriz de Rigidez de Barra - Viga
k42
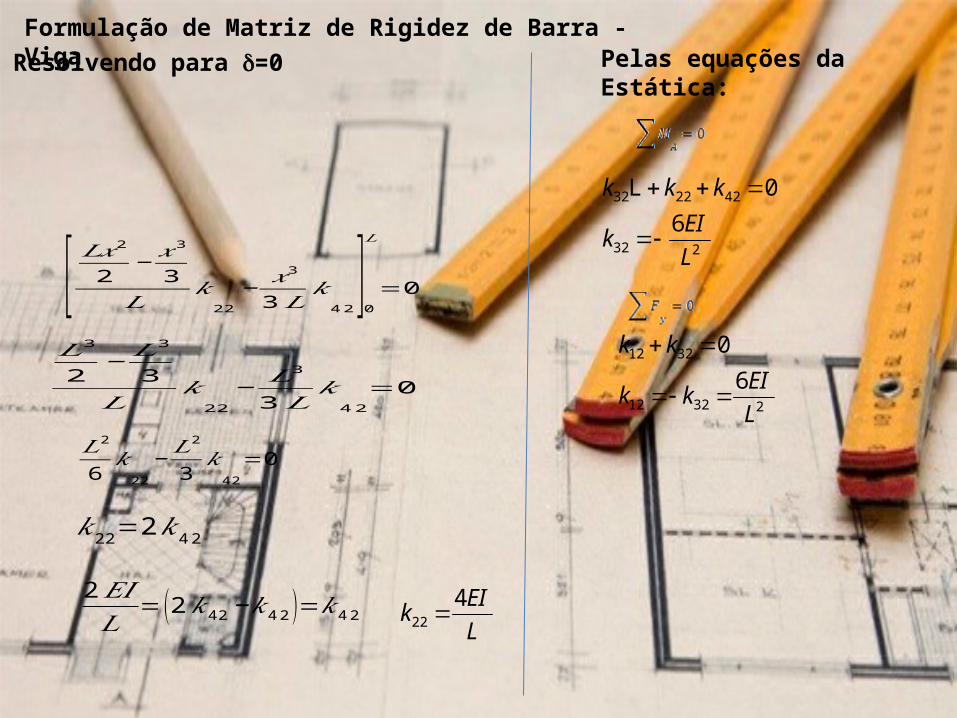
Resolvendo para d=0
[ 𝐿𝑥2
2−𝑥3
3𝐿
𝑘22
−𝑥3
3𝐿𝑘
42]
0
𝐿
=0
𝐿3
2−𝐿3
3𝐿
𝑘22
−𝐿3
3𝐿𝑘
4 2
=0
𝐿2
6𝑘
22
−𝐿2
3𝑘
4 2
=0
𝑘22=2𝑘4 2
2𝐸𝐼𝐿
=(2𝑘4 2−𝑘4 2 )=𝑘4 2 4
22 L
EIk
Pelas equações da Estática:
232
422232
6
0L
L
EIk
kkk
23212
3212
6
0
L
EIkk
kk
Formulação de Matriz de Rigidez de Barra - Viga
4626
612612
2646
612612
22
22
3
LLLL
LL
LLLL
LL
L
EIKv
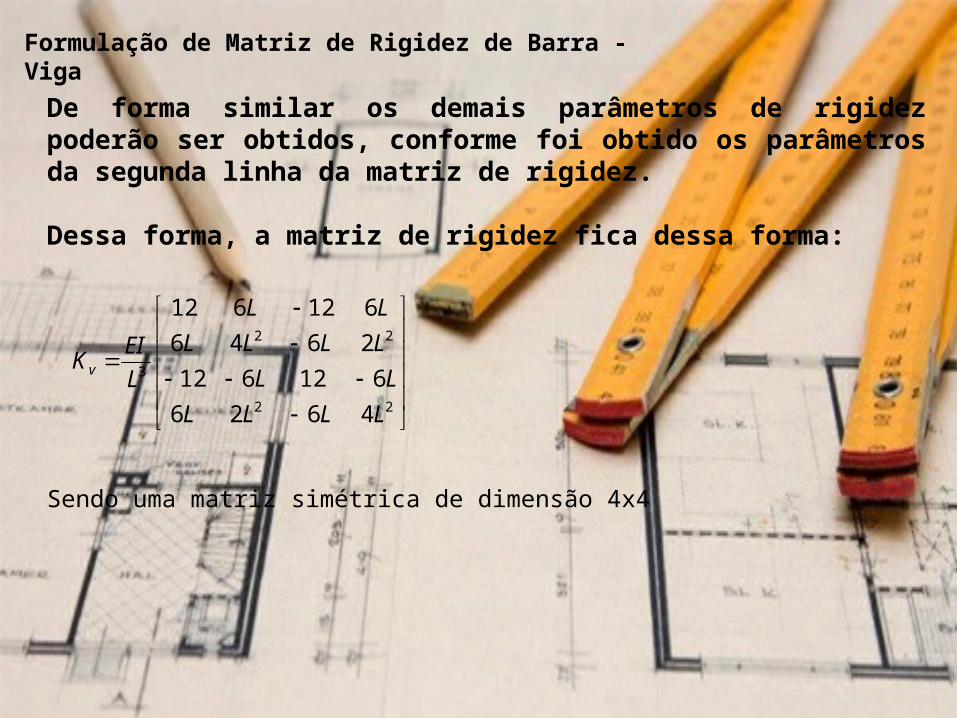
De forma similar os demais parâmetros de rigidez poderão ser obtidos, conforme foi obtido os parâmetros da segunda linha da matriz de rigidez.
Dessa forma, a matriz de rigidez fica dessa forma:
Formulação de Matriz de Rigidez de Barra - Viga
Sendo uma matriz simétrica de dimensão 4x4
Mapeando o sistema local para o sistema global
• A partir da matriz de rigidez da barra deve-se posicionar os elementos de rigidez na matriz global da estrutura
Dimensão final da matriz de rigidez da estrutura:
Tendo em vista que foram considerados dois deslocamentos por nó ( ,d q) a dimensão final da matriz de rigidez da estrutura será dada por:
Dim=No. Nós x No. Descolcamentos
O sistema de carregamento:
Todas as cargas existentes na estrutura devem ser transformadas em carregamentos nodais equivalentes como por exemplo:
Imposição das condições de contorno:
Para resolver o problema deve-se impor as condições de deslocamentos prescritos de acordo com as condições de apoio. Na matriz de rigidez atribui-se uma rigidez infinita na diagonal da matriz equivalente ao deslocamento nulo.
Formulação de Matriz de Rigidez de Barra - Viga
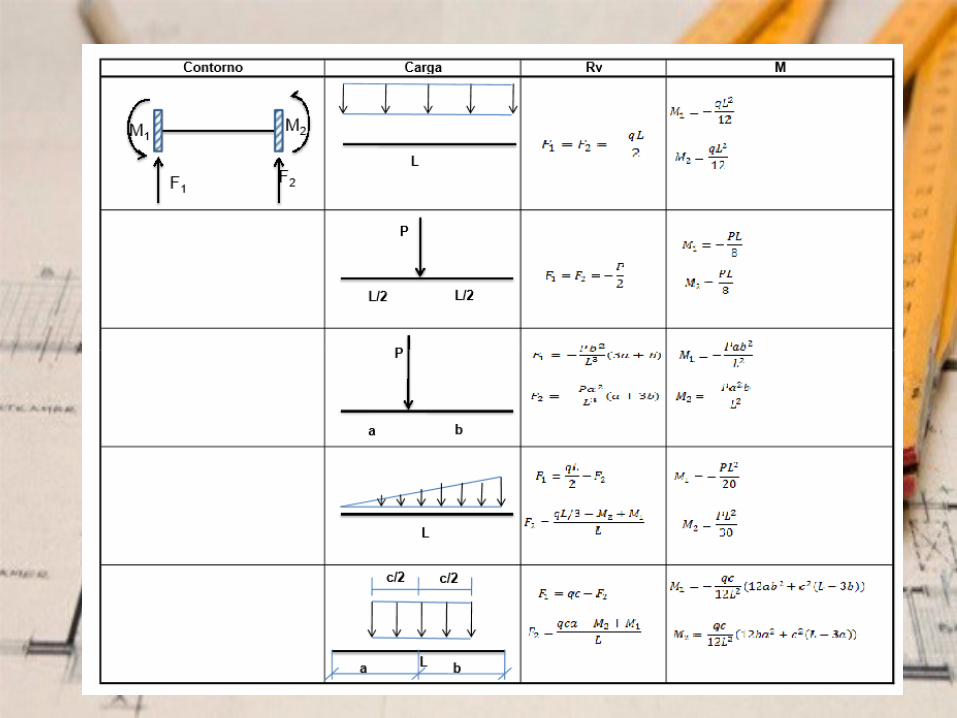
Carregamento Nodal EquivalenteSegue a tabela com ações nodais equivalentes
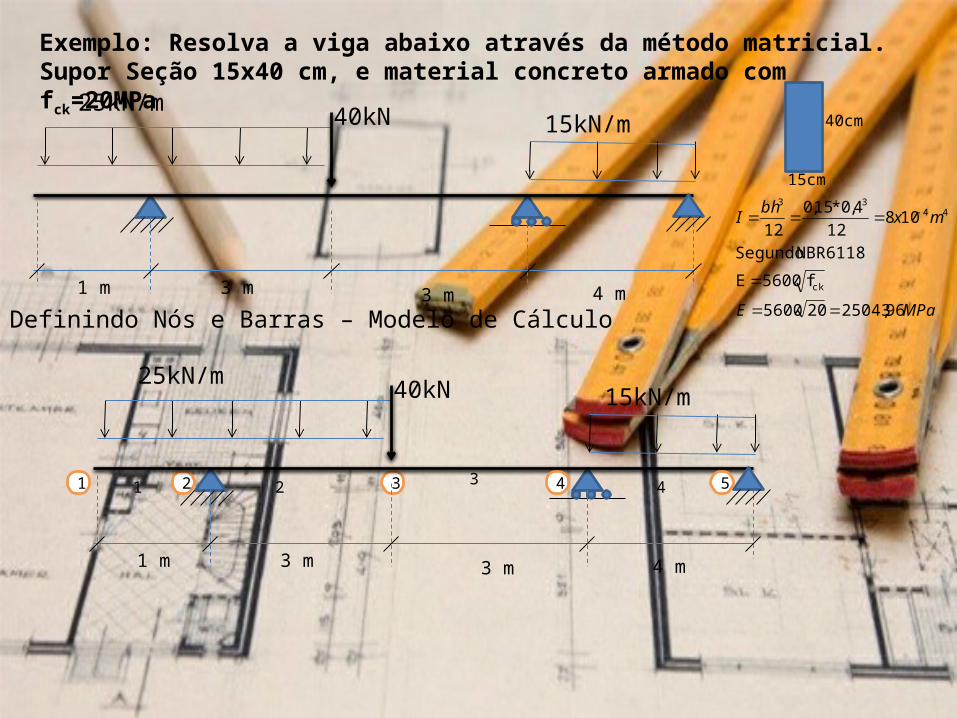
Exemplo: Resolva a viga abaixo através da método matricial. Supor Seção 15x40 cm, e material concreto armado com fck=20MPa
3 m3 m1 m
25kN/m15kN/m40kN
4 mDefinindo Nós e Barras – Modelo de Cálculo
1 2 3
3 m3 m1 m
25kN/m15kN/m40kN
4 m
4 51 2 3 4
15cm
40cm
4433
10812
4,0*15,0
12mx
bhI
MPaE 96,25043205600
f5600E
NBR6118 Segundo
ck
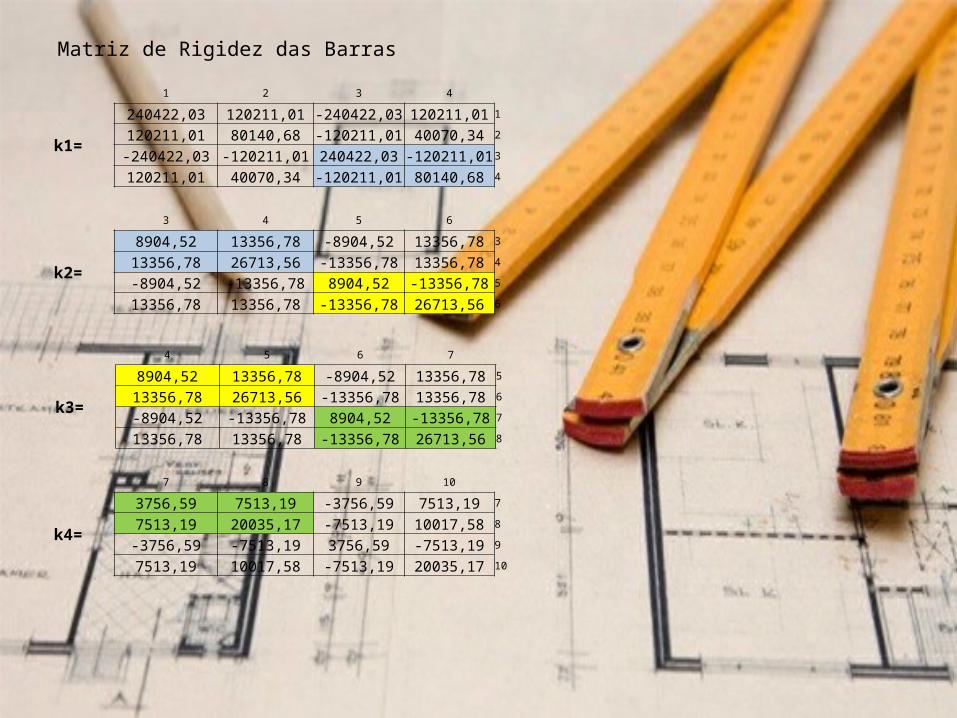
Matriz de Rigidez das Barras
1 2 3 4
k1=
240422,03 120211,01 -240422,03 120211,01 1
120211,01 80140,68 -120211,01 40070,34 2
-240422,03 -120211,01 240422,03 -120211,01 3
120211,01 40070,34 -120211,01 80140,68 4
3 4 5 6
k2=
8904,52 13356,78 -8904,52 13356,78 3
13356,78 26713,56 -13356,78 13356,78 4
-8904,52 -13356,78 8904,52 -13356,78 5
13356,78 13356,78 -13356,78 26713,56 6
4 5 6 7
k3=
8904,52 13356,78 -8904,52 13356,78 5
13356,78 26713,56 -13356,78 13356,78 6
-8904,52 -13356,78 8904,52 -13356,78 7
13356,78 13356,78 -13356,78 26713,56 8
7 8 9 10
k4=
3756,59 7513,19 -3756,59 7513,19 7
7513,19 20035,17 -7513,19 10017,58 8
-3756,59 -7513,19 3756,59 -7513,19 9
7513,19 10017,58 -7513,19 20035,17 10
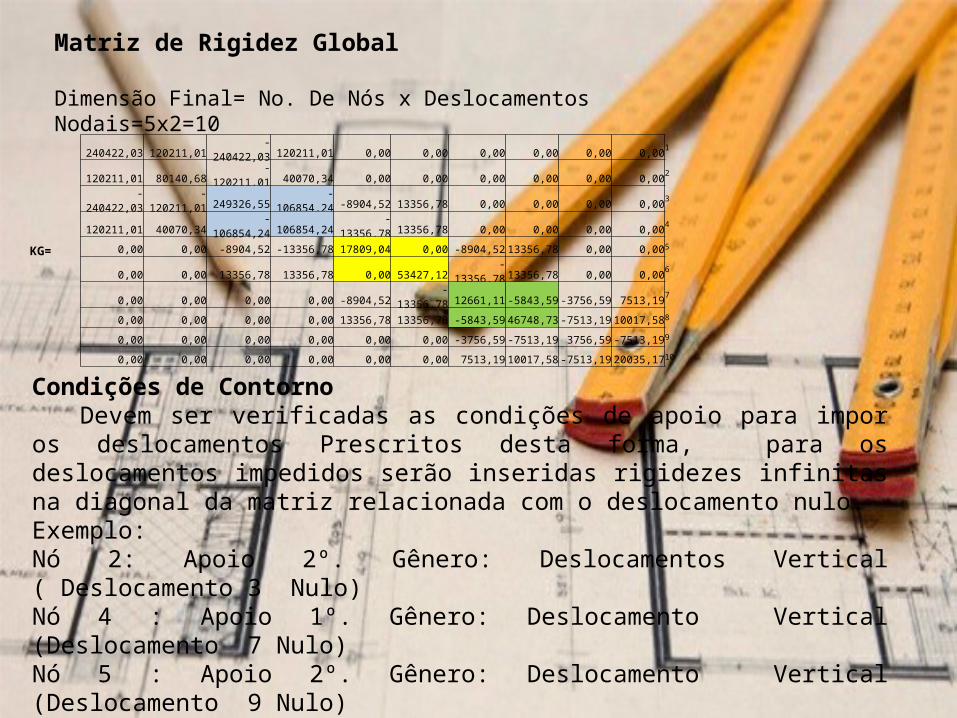
Matriz de Rigidez Global
Dimensão Final= No. De Nós x Deslocamentos Nodais=5x2=10
KG=
240422,03 120211,01 -240422,03 120211,01 0,00 0,00 0,00 0,00 0,00 0,001
120211,01 80140,68 -120211,01 40070,34 0,00 0,00 0,00 0,00 0,00 0,002
-240422,03 -120211,01 249326,55 -106854,24 -8904,52 13356,78 0,00 0,00 0,00 0,003
120211,01 40070,34 -106854,24 106854,24 -13356,78 13356,78 0,00 0,00 0,00 0,004
0,00 0,00 -8904,52 -13356,78 17809,04 0,00 -8904,52 13356,78 0,00 0,005
0,00 0,00 13356,78 13356,78 0,00 53427,12 -13356,78 13356,78 0,00 0,006
0,00 0,00 0,00 0,00 -8904,52 -13356,78 12661,11 -5843,59 -3756,59 7513,197
0,00 0,00 0,00 0,00 13356,78 13356,78 -5843,59 46748,73 -7513,19 10017,588
0,00 0,00 0,00 0,00 0,00 0,00 -3756,59 -7513,19 3756,59 -7513,199
0,00 0,00 0,00 0,00 0,00 0,00 7513,19 10017,58 -7513,19 20035,1710
Condições de ContornoDevem ser verificadas as condições de apoio para impor os deslocamentos
Prescritos desta forma, para os deslocamentos impedidos serão inseridas rigidezes infinitas na diagonal da matriz relacionada com o deslocamento nulo.Exemplo:Nó 2: Apoio 2º. Gênero: Deslocamentos Vertical ( Deslocamento 3 Nulo)Nó 4 : Apoio 1º. Gênero: Deslocamento Vertical (Deslocamento 7 Nulo) Nó 5 : Apoio 2º. Gênero: Deslocamento Vertical (Deslocamento 9 Nulo)
Desta forma a matriz de rigidez global com a a inserção da rigidez infinita fica:
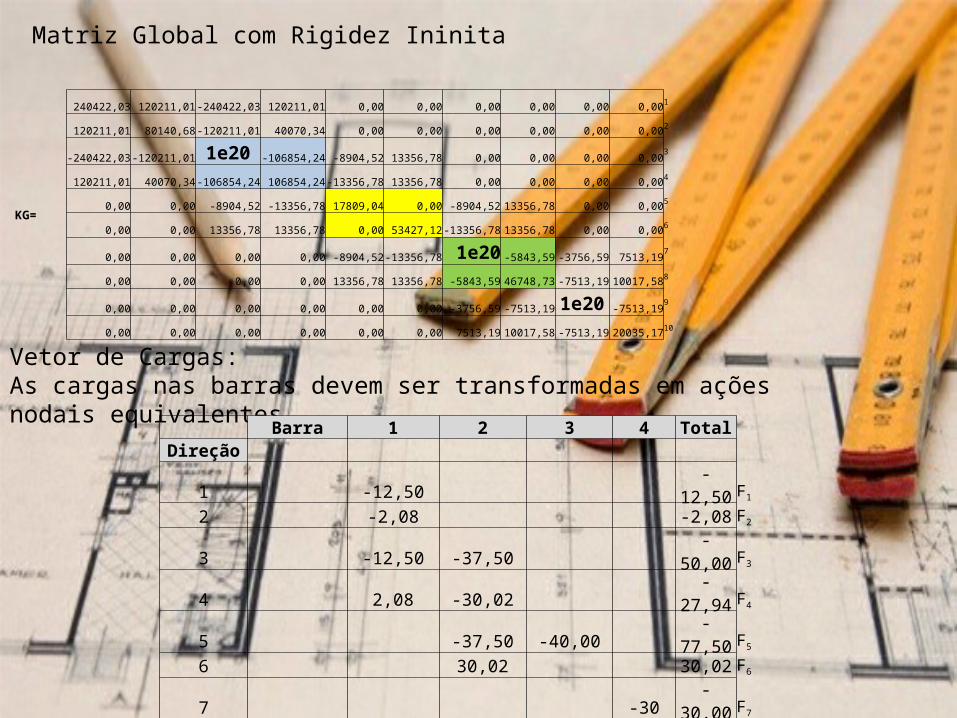
Matriz Global com Rigidez Ininita
KG=
240422,03 120211,01 -240422,03 120211,01 0,00 0,00 0,00 0,00 0,00 0,001
120211,01 80140,68 -120211,01 40070,34 0,00 0,00 0,00 0,00 0,00 0,002
-240422,03 -120211,01 1e20 -106854,24 -8904,52 13356,78 0,00 0,00 0,00 0,003
120211,01 40070,34 -106854,24 106854,24 -13356,78 13356,78 0,00 0,00 0,00 0,004
0,00 0,00 -8904,52 -13356,78 17809,04 0,00 -8904,52 13356,78 0,00 0,005
0,00 0,00 13356,78 13356,78 0,00 53427,12 -13356,78 13356,78 0,00 0,006
0,00 0,00 0,00 0,00 -8904,52 -13356,78 1e20 -5843,59 -3756,59 7513,197
0,00 0,00 0,00 0,00 13356,78 13356,78 -5843,59 46748,73 -7513,19 10017,588
0,00 0,00 0,00 0,00 0,00 0,00 -3756,59 -7513,19 1e20 -7513,199
0,00 0,00 0,00 0,00 0,00 0,00 7513,19 10017,58 -7513,19 20035,1710
Vetor de Cargas:As cargas nas barras devem ser transformadas em ações nodais equivalentes
Barra 1 2 3 4 TotalDireção
1 -12,50 -12,50 F1
2 -2,08 -2,08 F2
3 -12,50 -37,50 -50,00 F3
4 2,08 -30,02 -27,94 F4
5 -37,50 -40,00 -77,50 F5
6 30,02 30,02 F6
7 -30 -30,00 F7
8 -20 -20,00 F8
9 -30 -30,00 F9
10 20 20,00 F10
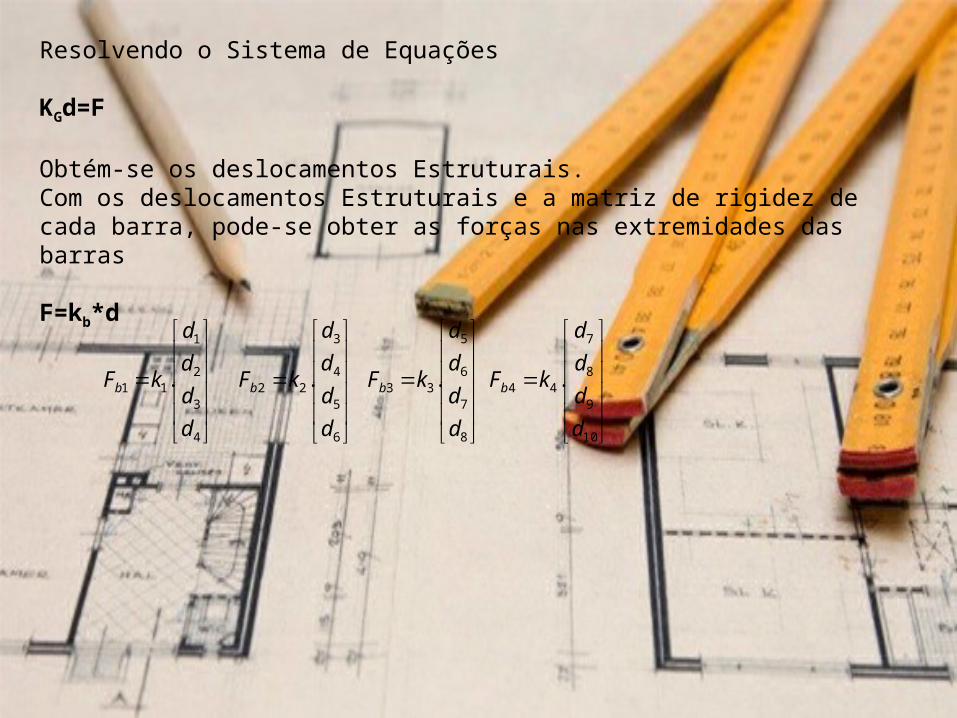
Resolvendo o Sistema de Equações
KGd=F
Obtém-se os deslocamentos Estruturais.Com os deslocamentos Estruturais e a matriz de rigidez de cada barra, pode-se obter as forças nas extremidades das barras
F=kb*d
10
9
8
7
44
8
7
6
5
33
6
5
4
3
22
4
3
2
1
11 . . . .
d
d
d
d
kF
d
d
d
d
kF
d
d
d
d
kF
d
d
d
d
kF bbbb
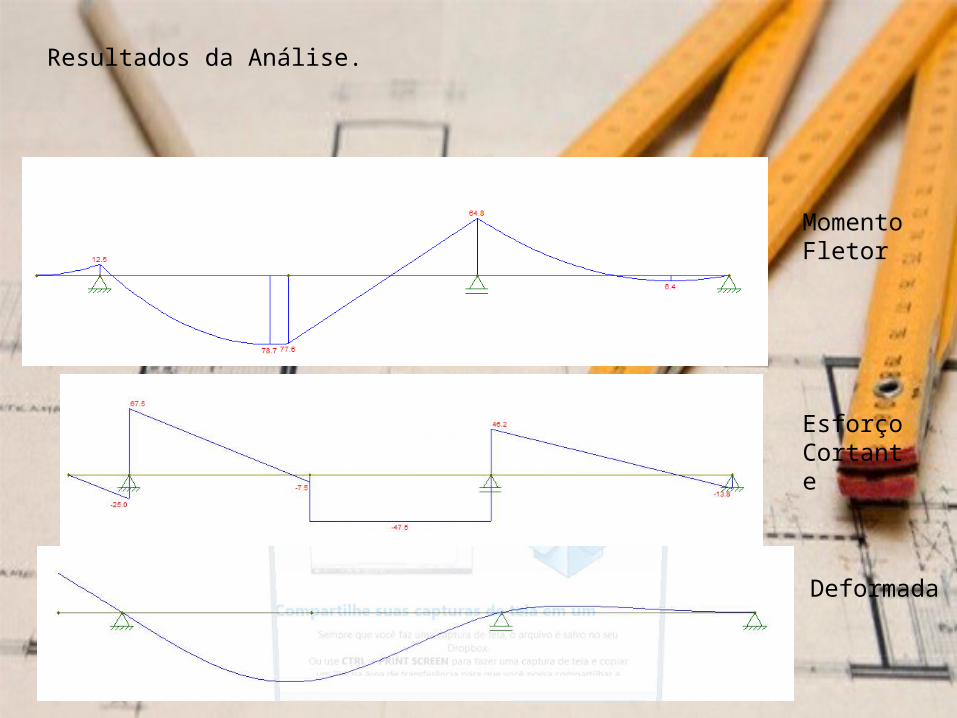
Momento Fletor
Esforço Cortante
Deformada
Resultados da Análise.
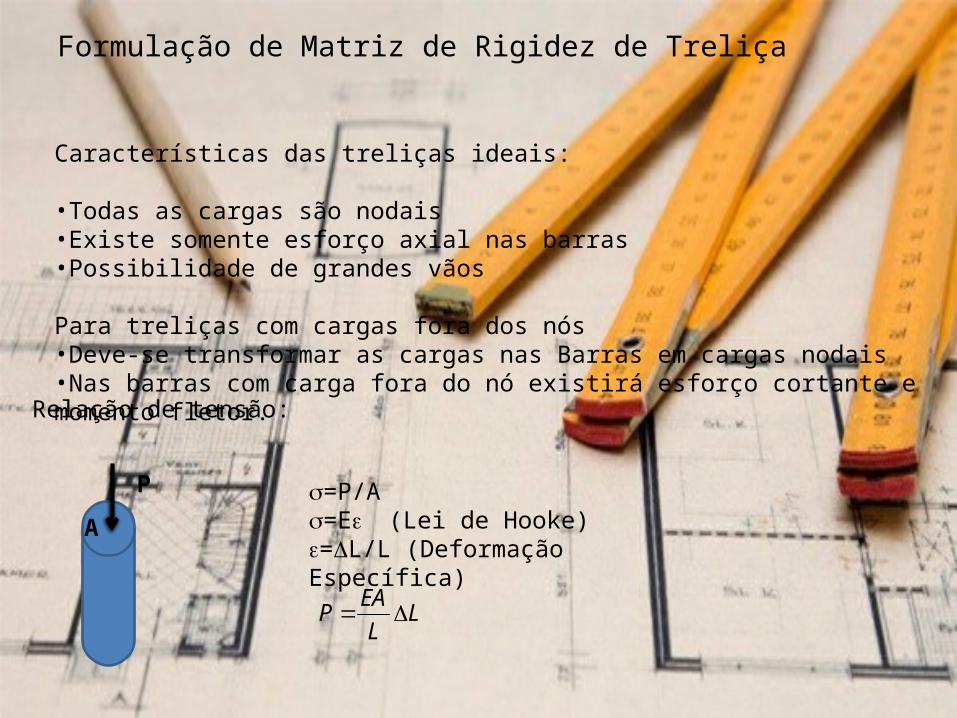
Formulação de Matriz de Rigidez de Treliça
Características das treliças ideais:
•Todas as cargas são nodais•Existe somente esforço axial nas barras•Possibilidade de grandes vãos
Para treliças com cargas fora dos nós•Deve-se transformar as cargas nas Barras em cargas nodais•Nas barras com carga fora do nó existirá esforço cortante e momento fletor.
Relação de tensão:
P
A
s=P/As=E e (Lei de Hooke)e=DL/L (Deformação Específica)
LL
EAP
Formulação de Matriz de Rigidez de Treliça – Caso Geral
qi
j
x
y
ai
j
x
y 1
sen(a)
yiyj
xixj
yi
xi
i
FF
FF
senL
EAF
L
EAF
L
EAF
,,
,,
,
2,
)()cos(
)(cos
)cos(
yiyj
xixj
yi
xi
i
FF
FF
senL
EAF
senL
EAF
senL
EAF
,,
,,
2,
,
)(
)()cos(
)(
ai
j
x
y
1
Cos(a)
Fi
Fj
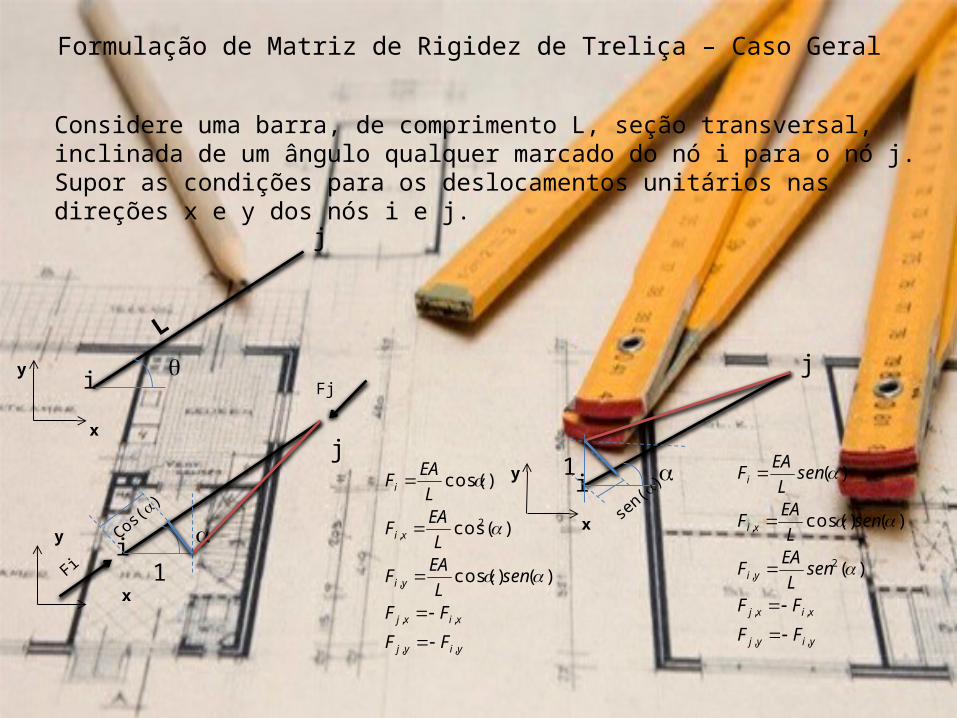
Considere uma barra, de comprimento L, seção transversal, inclinada de um ângulo qualquer marcado do nó i para o nó j. Supor as condições para os deslocamentos unitários nas direções x e y dos nós i e j.
L
Formulação de Matriz de Rigidez de Treliça – Caso Geral
ai
j
x
y
1
yjyi
xjxi
yj
xj
j
FF
FF
senL
EAF
senL
EAF
senL
EAF
,,
,,
2,
,
)(
)()cos(
)(
yjyi
xjxi
yj
xj
j
FF
FF
senL
EAF
L
EAF
L
EAF
,,
,,
,
2,
)()cos(
)(cos
)cos(
ai
j
x
y
1
Cos(a)
Fi
Fj
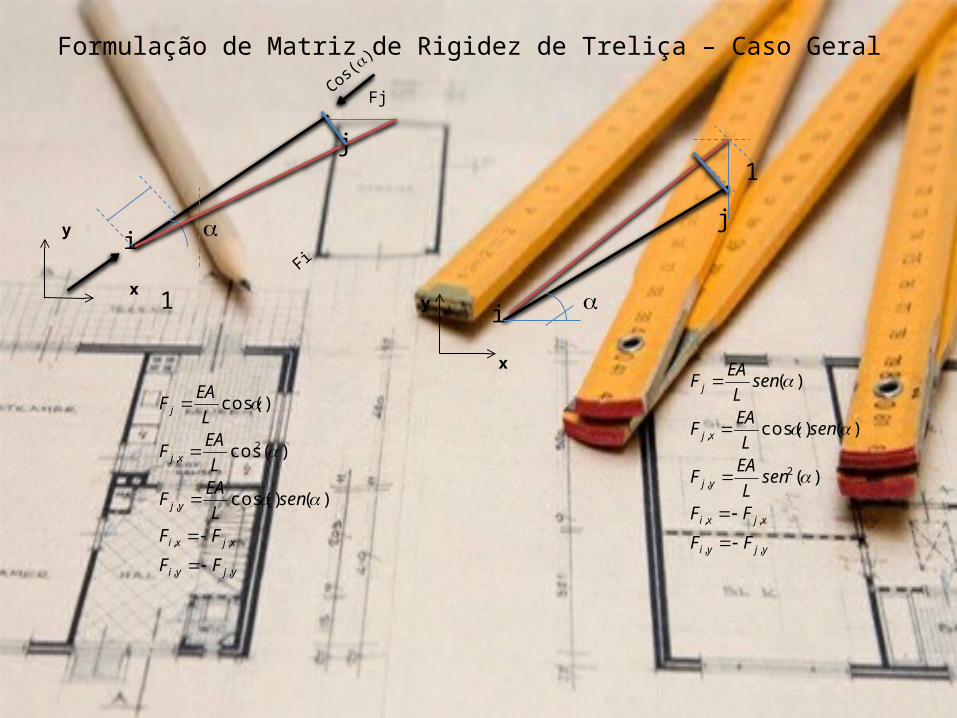
Formulação de Matriz de Rigidez de Treliça – Caso Geral
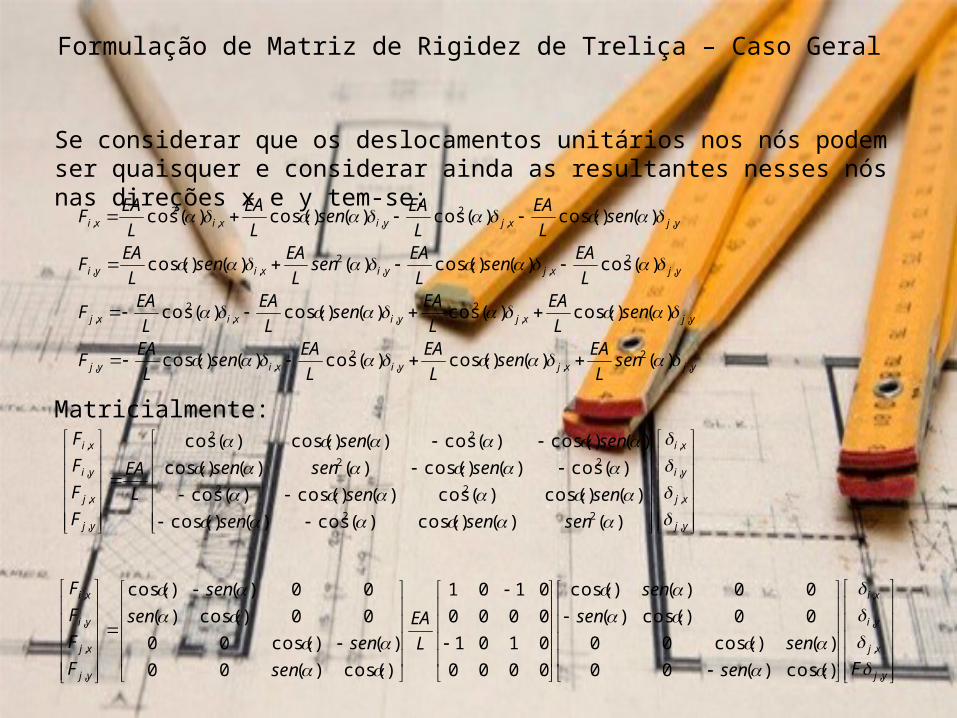
Se considerar que os deslocamentos unitários nos nós podem ser quaisquer e considerar ainda as resultantes nesses nós nas direções x e y tem-se:
yjxjyixiyj
yjxjyixixj
yjxjyixiyi
yjxjyixixi
senL
EAsen
L
EA
L
EAsen
L
EAF
senL
EA
L
EAsen
L
EA
L
EAF
L
EAsen
L
EAsen
L
EAsen
L
EAF
senL
EA
L
EAsen
L
EA
L
EAF
,2
,,2
,,
,,2
,,2
,
,2
,,2
,,
,,2
,,2
,
)()()cos()(cos)()cos(
)()cos()(cos)()cos()(cos
)(cos)()cos()()()cos(
)()cos()(cos)()cos()(cos
Matricialmente:
yj
xj
yi
xi
yj
xj
yi
xi
sensensen
sensen
sensensen
sensen
L
EA
F
F
F
F
,
,
,
,
22
22
22
22
,
,
,
,
)()()cos()(cos)()cos(
)()cos()(cos)()cos()(cos
)(cos)()cos()()()cos(
)()cos()(cos)()cos()(cos
yj
xj
yi
xi
yj
xj
yi
xi
Fsen
sen
sen
sen
L
EA
sen
sen
sen
sen
F
F
F
F
,
,
,
,
,
,
,
,
)cos()(00
)()cos(00
00)cos()(
00)()cos(
0000
0101
0000
0101
)cos()(00
)()cos(00
00)cos()(
00)()cos(
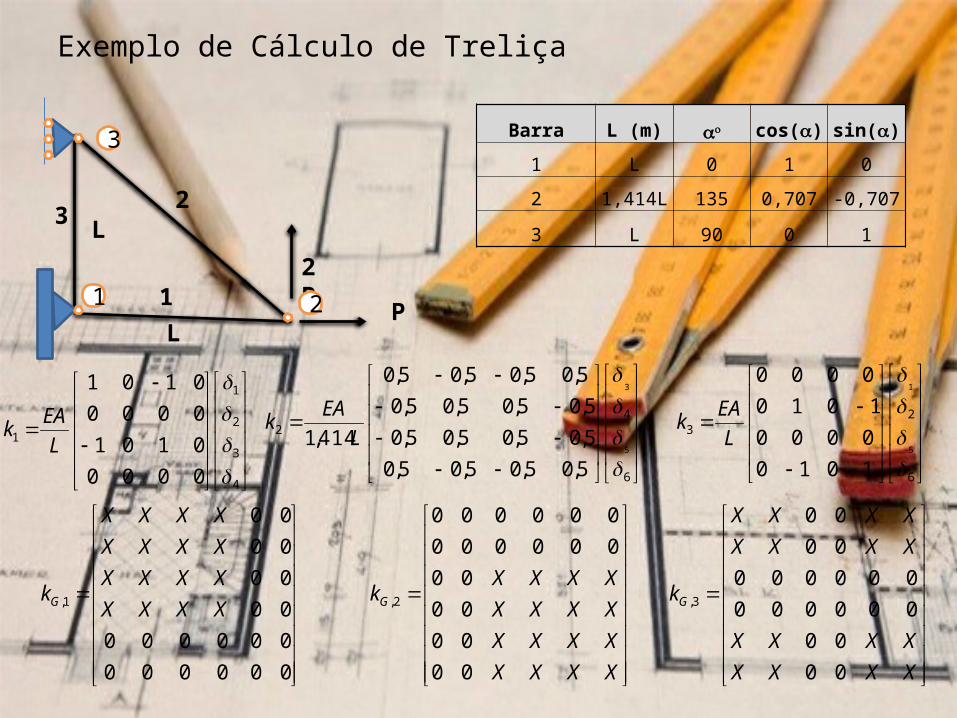
Exemplo de Cálculo de Treliça
P
2P1 2
3
1
23
L
L
Barra L (m) ao cos(a) sin(a)
1 L 0 1 0
2 1,414L 135 0,707 -0,707
3 L 90 0 1
4
3
2
1
1
0000
0101
0000
0101
L
EAk
6
42
5
3
5,05,05,05,0
5,05,05,05,0
5,05,05,05,0
5,05,05,05,0
414,1
L
EAk
6
23
5
1
1010
0000
1010
0000
L
EAk
000000
000000
00
00
00
00
1, XXXX
XXXX
XXXX
XXXX
kG
XXXX
XXXX
XXXX
XXXXkG
00
00
00
00
000000
000000
2,
XXXX
XXXX
XXXX
XXXX
kG
00
00
000000
000000
00
00
3,
353,1353,0353,0353,010
353,0353,0353,0353,000
353,0353,0353,0353,000
353,0353,0353,0353,101
100010
000101
,iGG kk
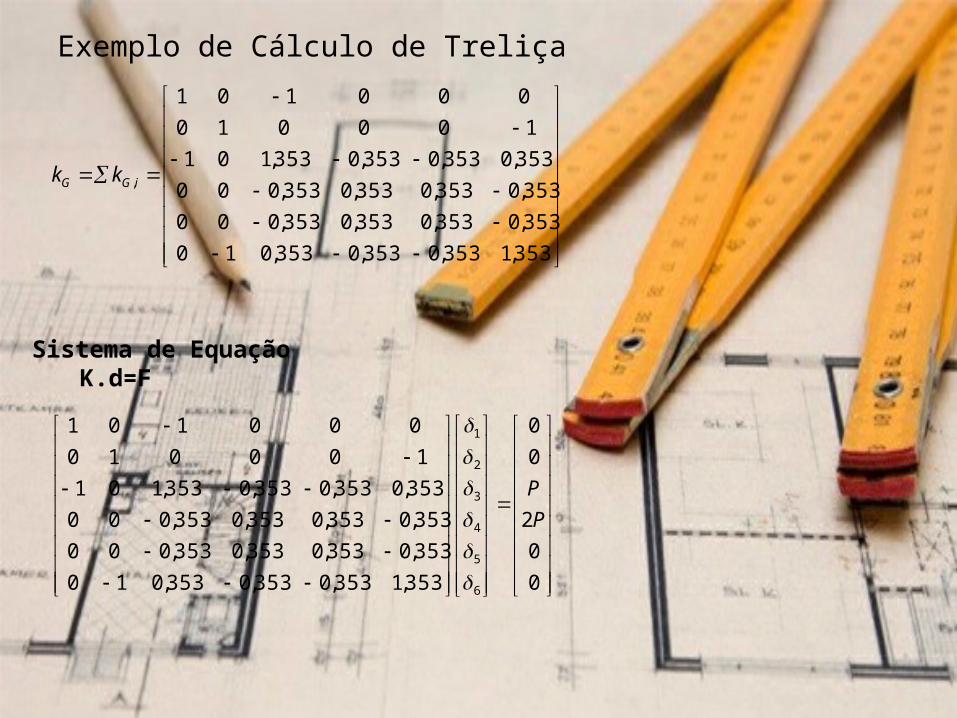
Exemplo de Cálculo de Treliça
Sistema de EquaçãoK.d=F
0
0
2
0
0
353,1353,0353,0353,010
353,0353,0353,0353,000
353,0353,0353,0353,000
353,0353,0353,0353,101
100010
000101
6
5
4
3
2
1
P
P
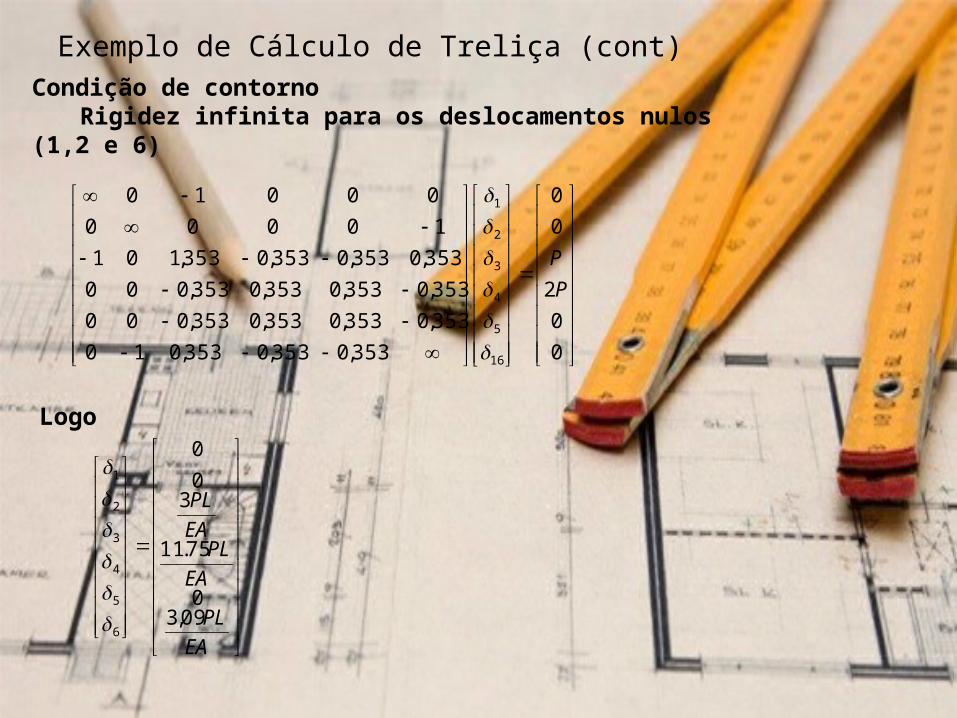
Exemplo de Cálculo de Treliça (cont)Condição de contorno
Rigidez infinita para os deslocamentos nulos (1,2 e 6)
0
0
2
0
0
353,0353,0353,010
353,0353,0353,0353,000
353,0353,0353,0353,000
353,0353,0353,0353,101
10000
00010
16
5
4
3
2
1
P
P
Logo
EA
PL
EA
PLEA
PL
09,30
75.11
30
0
6
5
4
3
2
1
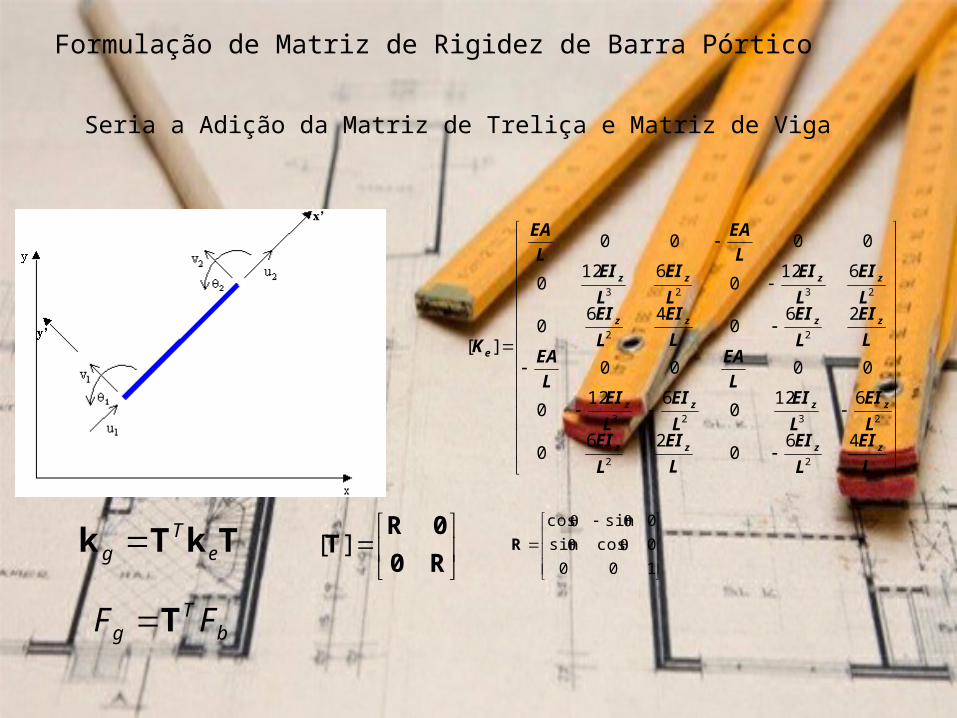
Formulação de Matriz de Rigidez de Barra Pórtico
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EA
K
zzzz
zzzz
zzzz
zzzz
e
460
260
6120
6120
0000
260
460
6120
6120
0000
][
22
2323
22
2323
100
0cossin
0sincos
RTkTk eT
g
Seria a Adição da Matriz de Treliça e Matriz de Viga
R0
0RT][
bT
g FF T
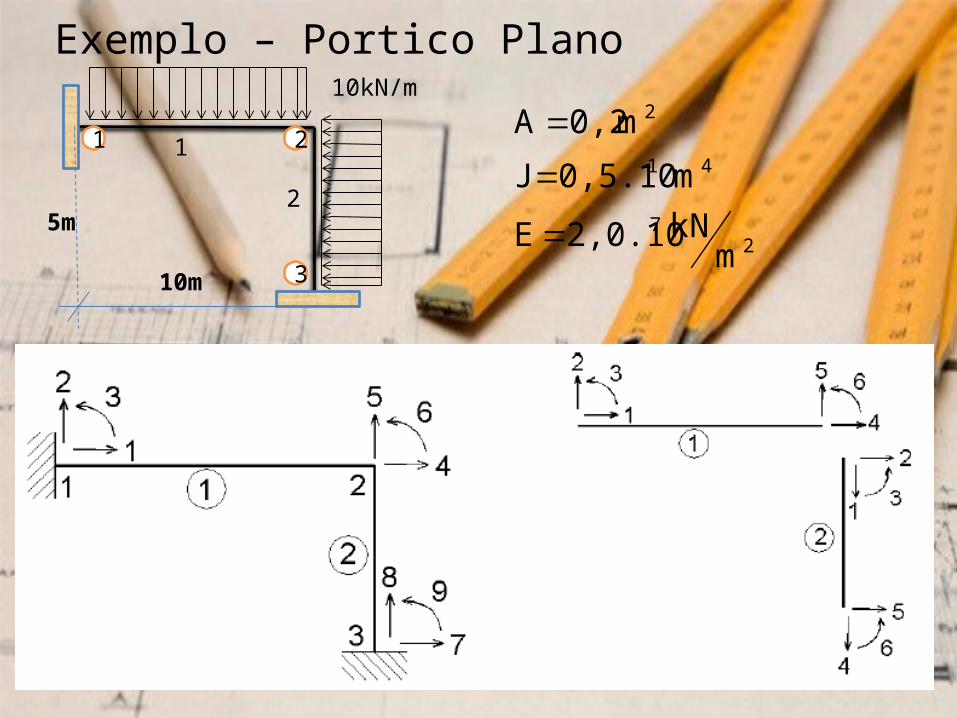
Exemplo – Portico Plano10kN/m
10m
5m2
7
41-
2
mkN 2,0.10 E
m 0,5.10 J
m 0,2 A
1 2
3
1
2
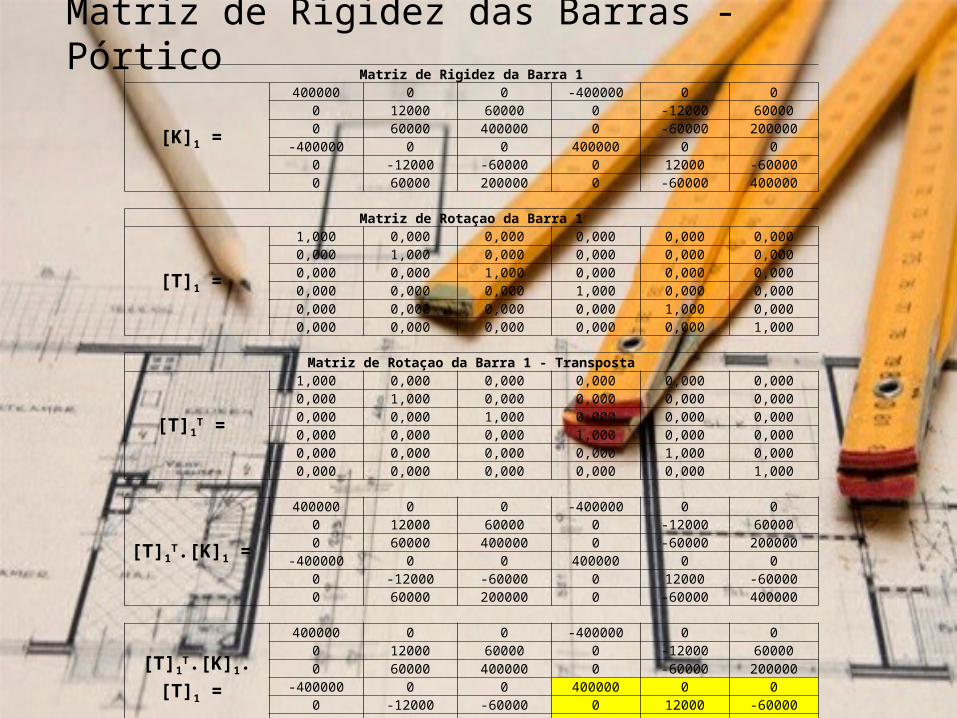
Matriz de Rigidez da Barra 1
[K]1 =
400000 0 0 -400000 0 00 12000 60000 0 -12000 600000 60000 400000 0 -60000 200000
-400000 0 0 400000 0 00 -12000 -60000 0 12000 -600000 60000 200000 0 -60000 400000
Matriz de Rotaçao da Barra 1
[T]1 =
1,000 0,000 0,000 0,000 0,000 0,0000,000 1,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 1,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
Matriz de Rotaçao da Barra 1 - Transposta
[T]1T =
1,000 0,000 0,000 0,000 0,000 0,0000,000 1,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 1,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
[T]1T.[K]1 =
400000 0 0 -400000 0 00 12000 60000 0 -12000 600000 60000 400000 0 -60000 200000
-400000 0 0 400000 0 00 -12000 -60000 0 12000 -600000 60000 200000 0 -60000 400000
[T]1T.[K]1.[T]1 =
400000 0 0 -400000 0 00 12000 60000 0 -12000 600000 60000 400000 0 -60000 200000
-400000 0 0 400000 0 00 -12000 -60000 0 12000 -600000 60000 200000 0 -60000 400000
Matriz de Rigidez das Barras - Pórtico
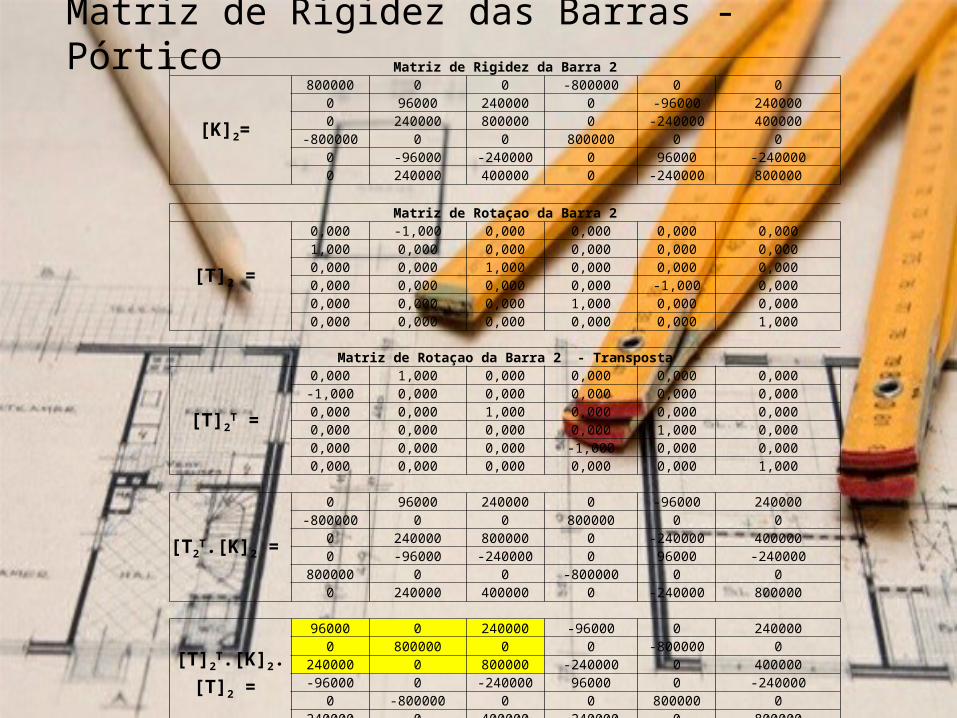
Matriz de Rigidez da Barra 2
[K]2=
800000 0 0 -800000 0 00 96000 240000 0 -96000 2400000 240000 800000 0 -240000 400000
-800000 0 0 800000 0 00 -96000 -240000 0 96000 -2400000 240000 400000 0 -240000 800000
Matriz de Rotaçao da Barra 2
[T]2 =
0,000 -1,000 0,000 0,000 0,000 0,0001,000 0,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 0,000 -1,000 0,0000,000 0,000 0,000 1,000 0,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
Matriz de Rotaçao da Barra 2 - Transposta
[T]2T =
0,000 1,000 0,000 0,000 0,000 0,000-1,000 0,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 -1,000 0,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
[T2T.[K]2 =
0 96000 240000 0 -96000 240000-800000 0 0 800000 0 0
0 240000 800000 0 -240000 4000000 -96000 -240000 0 96000 -240000
800000 0 0 -800000 0 00 240000 400000 0 -240000 800000
[T]2T.[K]2.[T]2 =
96000 0 240000 -96000 0 2400000 800000 0 0 -800000 0
240000 0 800000 -240000 0 400000-96000 0 -240000 96000 0 -240000
0 -800000 0 0 800000 0240000 0 400000 -240000 0 800000
Matriz de Rigidez das Barras - Pórtico
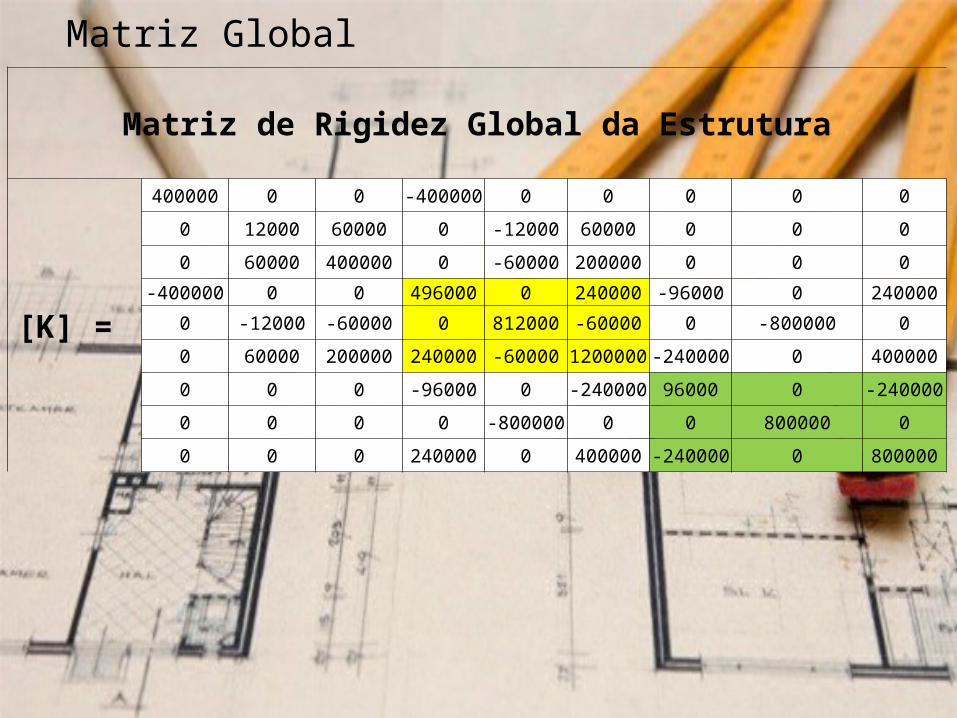
Matriz Global
Matriz de Rigidez Global da Estrutura
[K] =
400000 0 0 -400000 0 0 0 0 0
0 12000 60000 0 -12000 60000 0 0 0
0 60000 400000 0 -60000 200000 0 0 0
-400000 0 0 496000 0 240000 -96000 0 240000
0 -12000 -60000 0 812000 -60000 0 -800000 0
0 60000 200000 240000 -60000 1200000 -240000 0 400000
0 0 0 -96000 0 -240000 96000 0 -240000
0 0 0 0 -800000 0 0 800000 0
0 0 0 240000 0 400000 -240000 0 800000
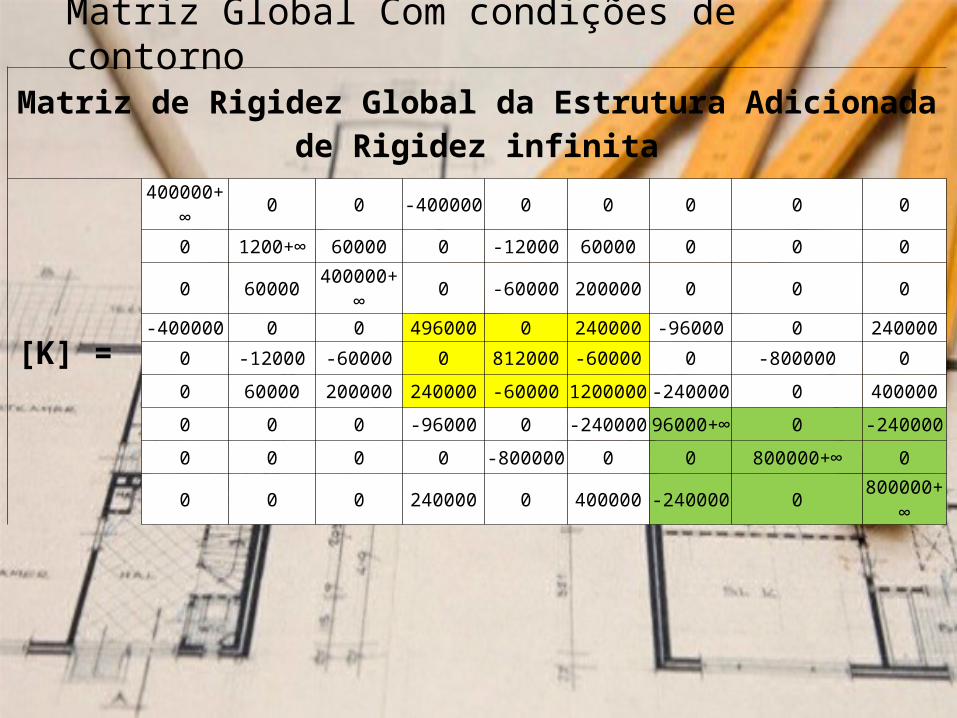
Matriz Global Com condições de contorno
Matriz de Rigidez Global da Estrutura Adicionada de Rigidez infinita
[K] =
400000+∞ 0 0 -400000 0 0 0 0 0
0 1200+∞ 60000 0 -12000 60000 0 0 0
0 60000 400000+∞ 0 -60000 200000 0 0 0
-400000 0 0 496000 0 240000 -96000 0 240000
0 -12000 -60000 0 812000 -60000 0 -800000 0
0 60000 200000 240000 -60000 1200000 -240000 0 400000
0 0 0 -96000 0 -240000 96000+∞ 0 -240000
0 0 0 0 -800000 0 0 800000+∞ 0
0 0 0 240000 0 400000 -240000 0 800000+∞
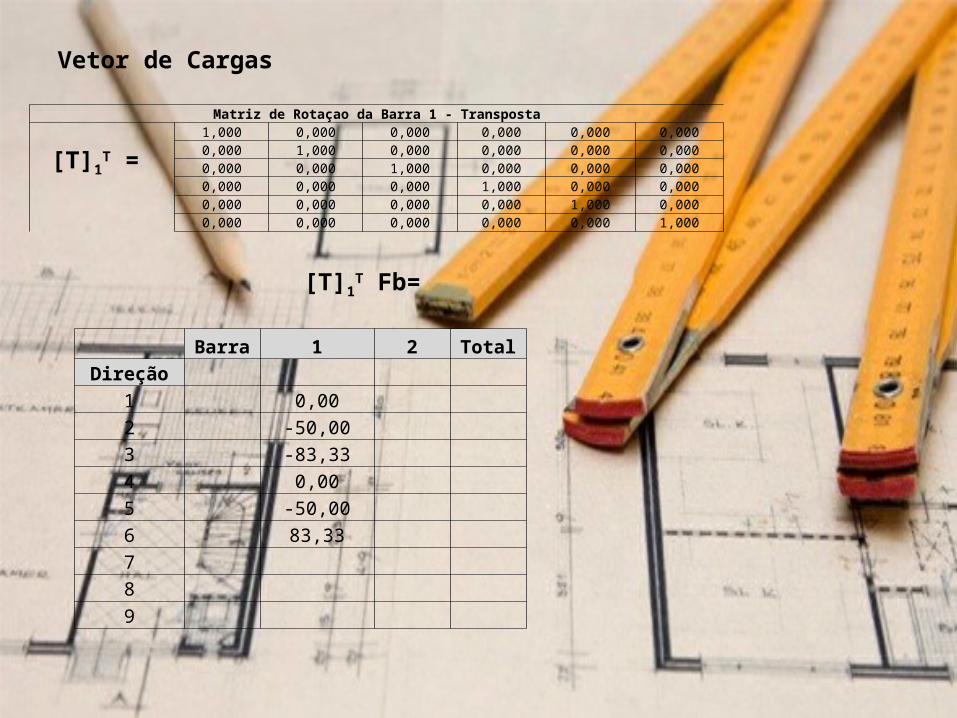
Vetor de Cargas
Barra 1 2 TotalDireção
1 0,002 -50,003 -83,334 0,005 -50,006 83,337 8 9
Matriz de Rotaçao da Barra 1 - Transposta
[T]1T =
1,000 0,000 0,000 0,000 0,000 0,0000,000 1,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 1,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
[T]1T Fb=
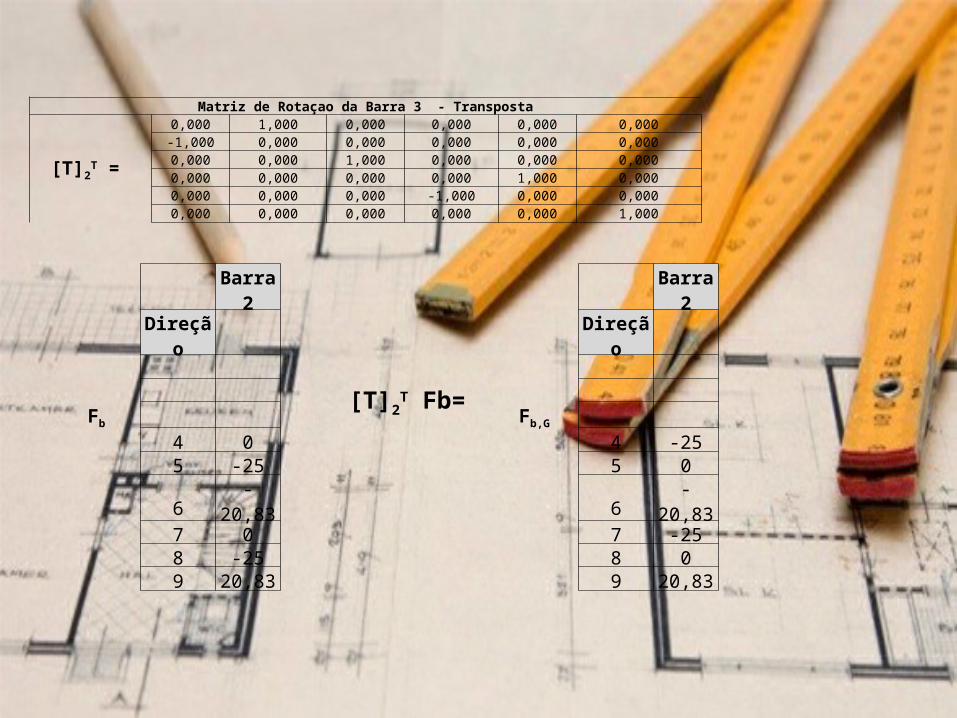
[T]2T Fb=
Matriz de Rotaçao da Barra 3 - Transposta
[T]2T =
0,000 1,000 0,000 0,000 0,000 0,000-1,000 0,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 -1,000 0,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
Barra 2
Direção
Fb 4 05 -256 -20,837 08 -259 20,83
Barra 2
Direção
Fb,G 4 -255 06 -20,837 -258 09 20,83
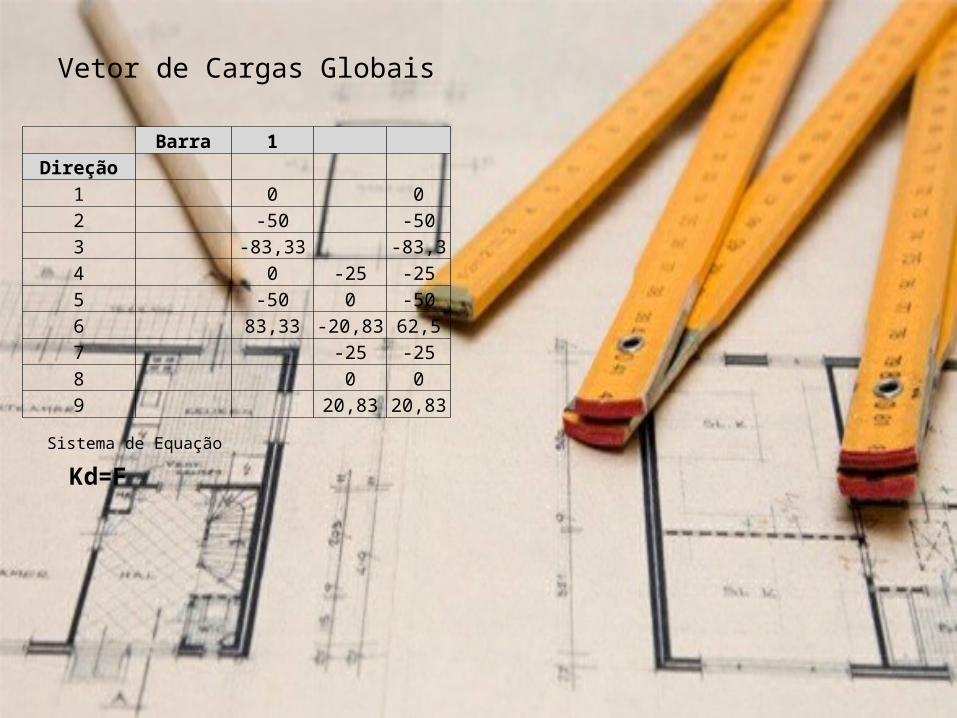
Vetor de Cargas Globais
Barra 1 Direção
1 0 02 -50 -503 -83,33 -83,34 0 -25 -255 -50 0 -506 83,33 -20,83 62,57 -25 -258 0 09 20,83 20,83
Sistema de Equação
Kd=F
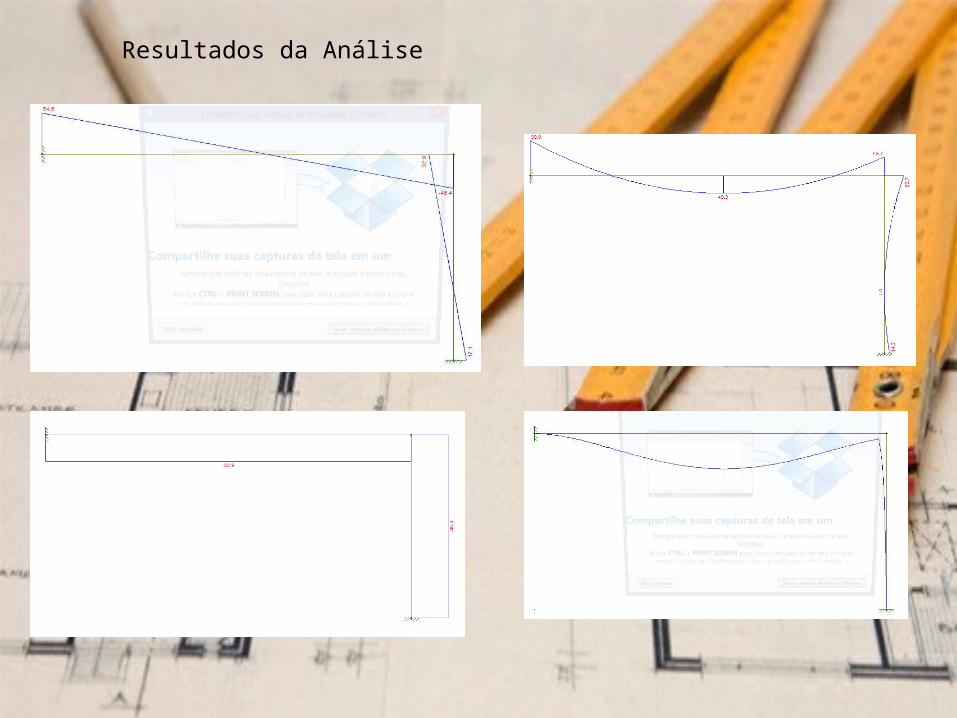
Resultados da Análise
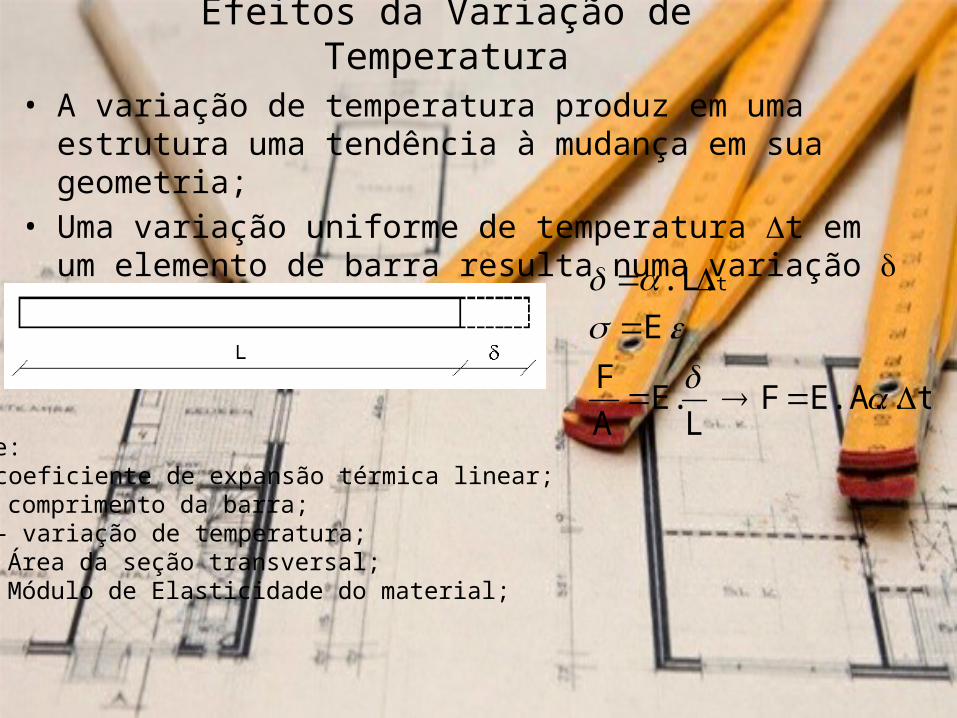
Efeitos da Variação de Temperatura
• A variação de temperatura produz em uma estrutura uma tendência à mudança em sua geometria;
• Uma variação uniforme de temperatura t em um elemento de barra resulta numa variação de comprimento;
t.L.
t.E.A. F L
E. A
F
E.
Onde:a- coeficiente de expansão térmica linear;L – comprimento da barra;t – variação de temperatura;A – Área da seção transversal;E – Módulo de Elasticidade do material;
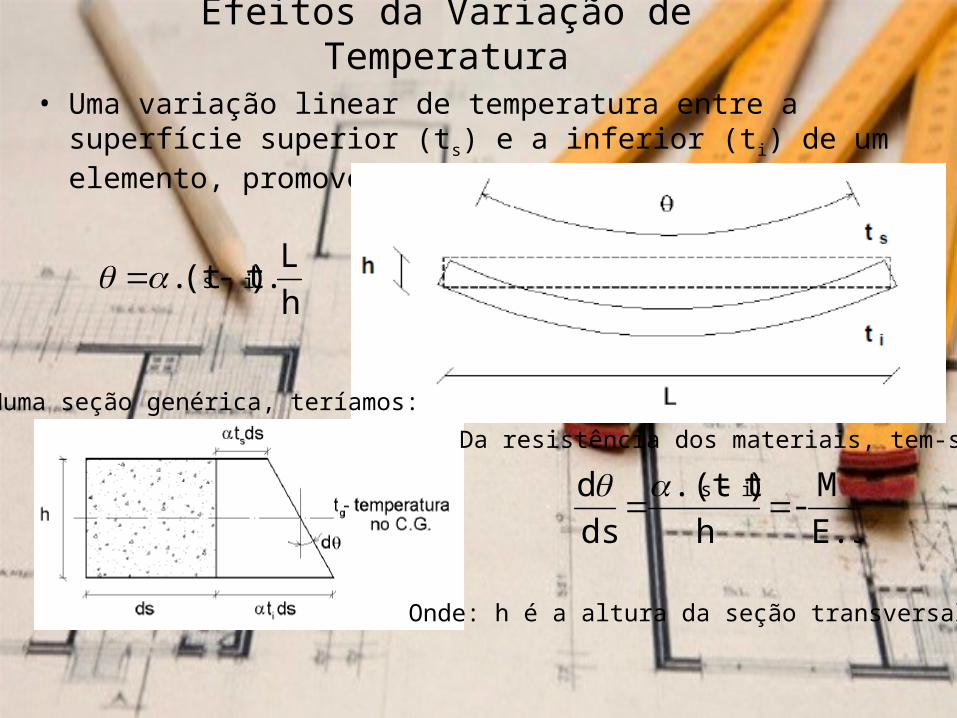
• Uma variação linear de temperatura entre a superfície superior (ts) e a inferior (ti) de um elemento, promove a flexão com rotação relativa;
Efeitos da Variação de Temperatura
h
L . ) t- (t . is
Numa seção genérica, teríamos:
E.J
M -
h
) t- .(t
ds
d is
Da resistência dos materiais, tem-se:
Onde: h é a altura da seção transversal:
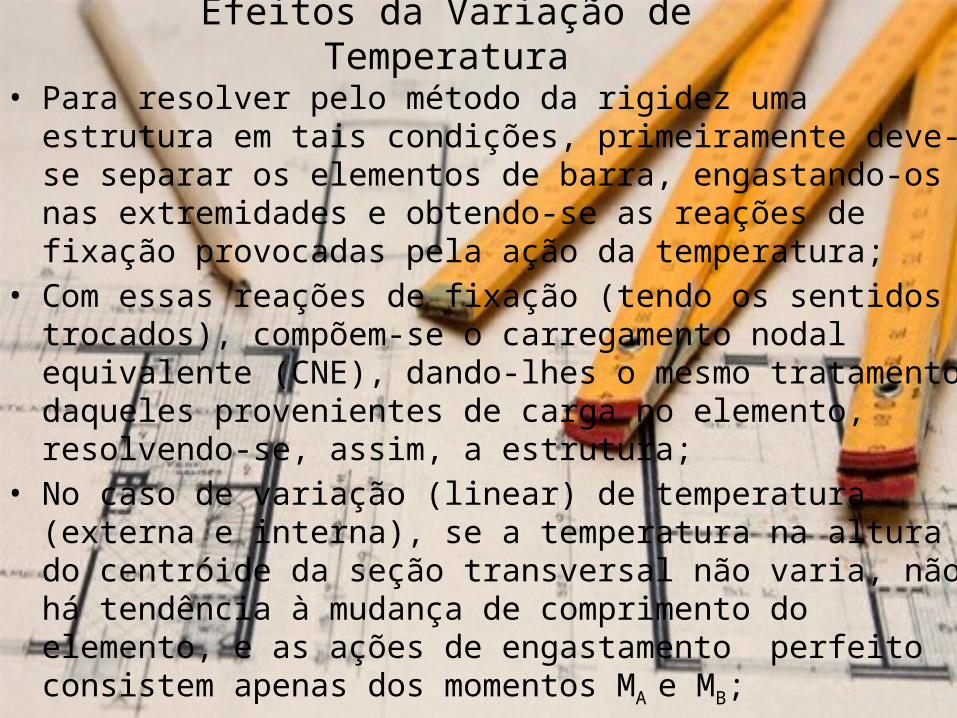
• Para resolver pelo método da rigidez uma estrutura em tais condições, primeiramente deve-se separar os elementos de barra, engastando-os nas extremidades e obtendo-se as reações de fixação provocadas pela ação da temperatura;
• Com essas reações de fixação (tendo os sentidos trocados), compõem-se o carregamento nodal equivalente (CNE), dando-lhes o mesmo tratamento daqueles provenientes de carga no elemento, resolvendo-se, assim, a estrutura;
• No caso de variação (linear) de temperatura (externa e interna), se a temperatura na altura do centróide da seção transversal não varia, não há tendência à mudança de comprimento do elemento, e as ações de engastamento perfeito consistem apenas dos momentos MA e MB;
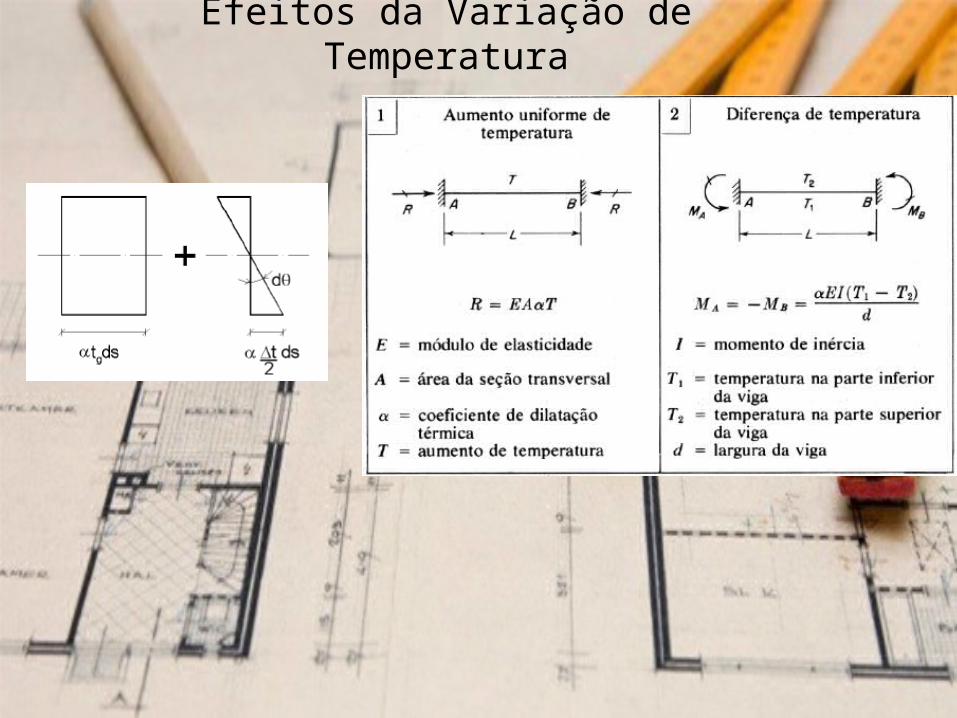
• Caso contrário, faz-se uma combinação das duas situações da tabela a seguir;
Efeitos da Variação de Temperatura
Efeitos da Variação de Temperatura
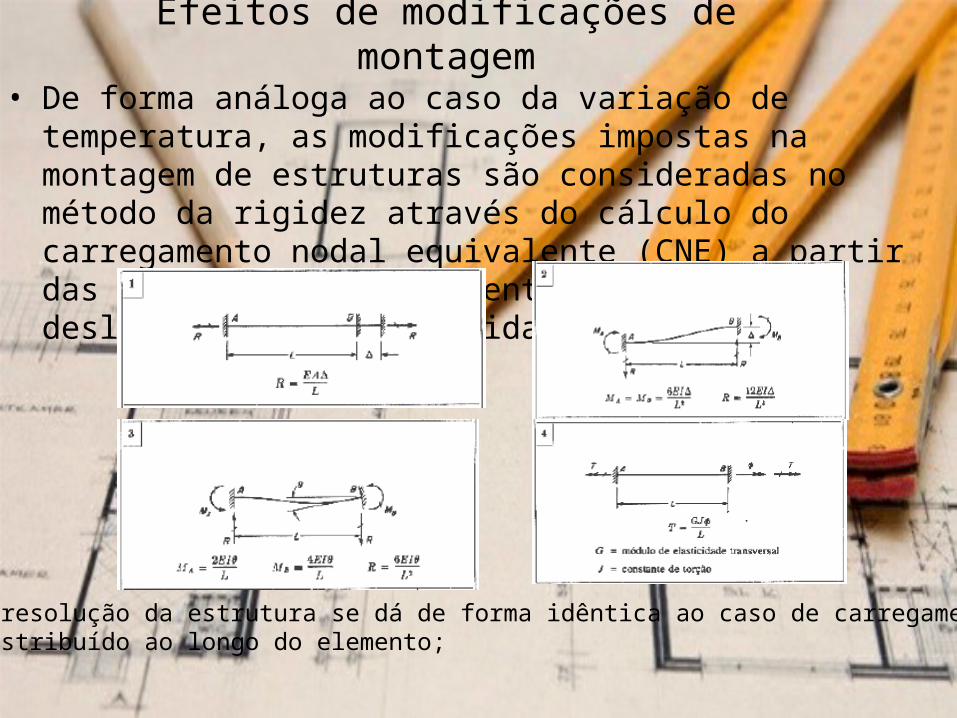
• De forma análoga ao caso da variação de temperatura, as modificações impostas na montagem de estruturas são consideradas no método da rigidez através do cálculo do carregamento nodal equivalente (CNE) a partir das reações de engastamento produzidas por deslocamentos de extremidade;
Efeitos de modificações de montagem
A resolução da estrutura se dá de forma idêntica ao caso de carregamentodistribuído ao longo do elemento;
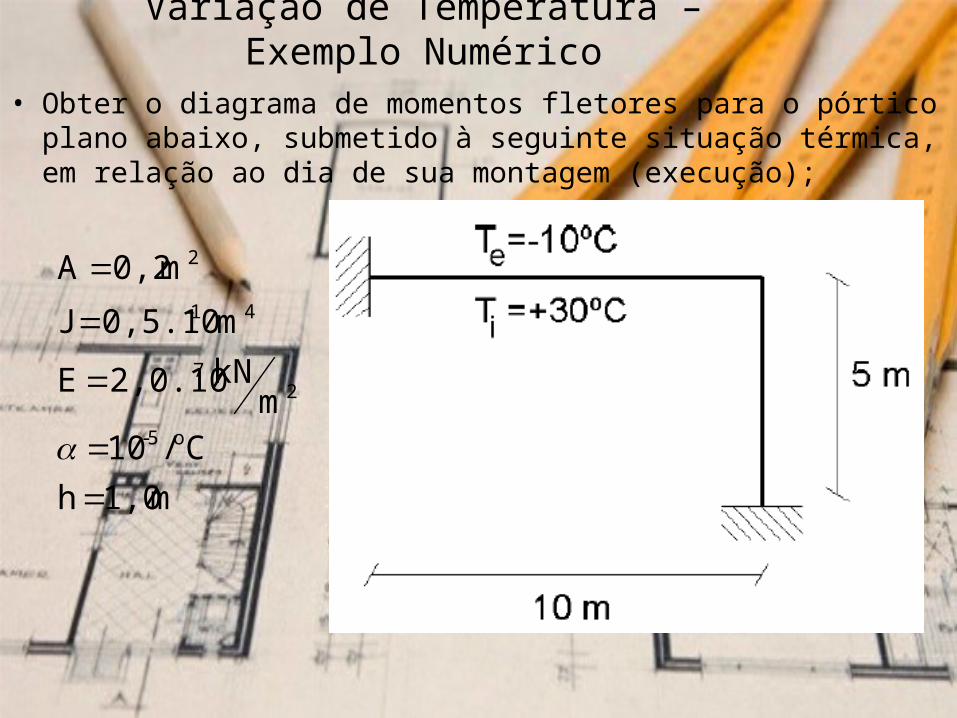
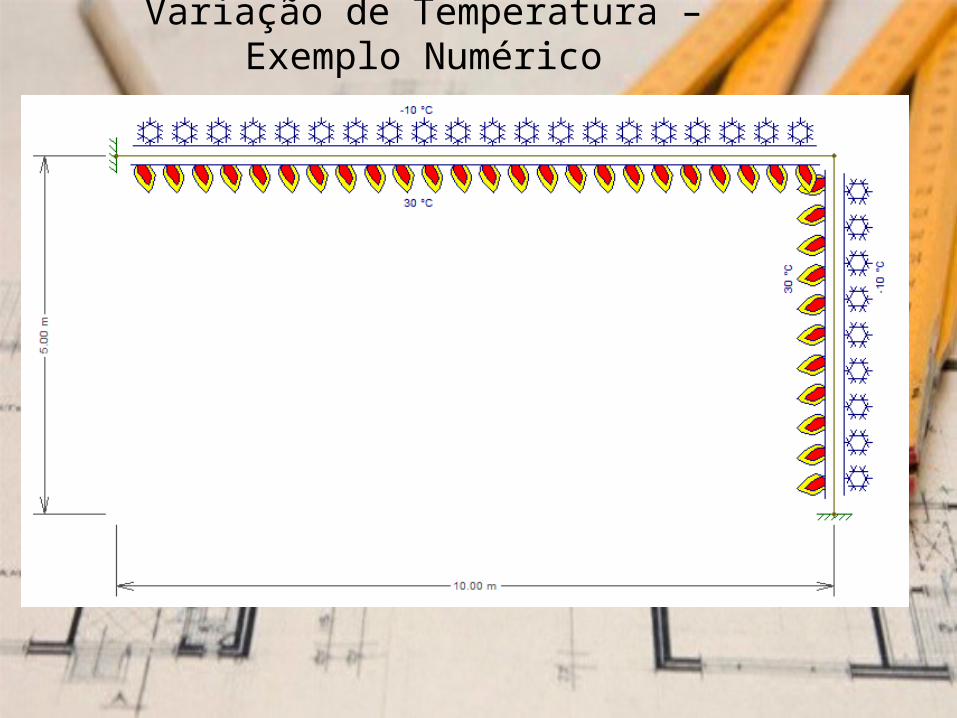
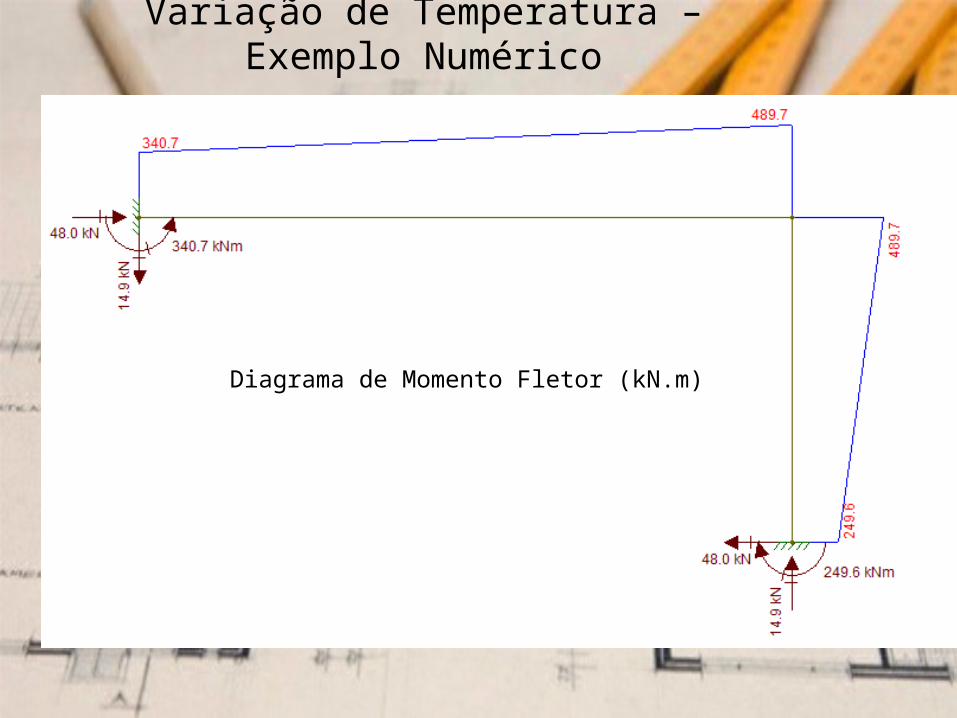
Variação de Temperatura – Exemplo Numérico
• Obter o diagrama de momentos fletores para o pórtico plano abaixo, submetido à seguinte situação térmica, em relação ao dia de sua montagem (execução);
m 1,0 h
C/10
mkN 2,0.10 E
m 0,5.10 J
m 0,2 A
o5-
27
41-
2
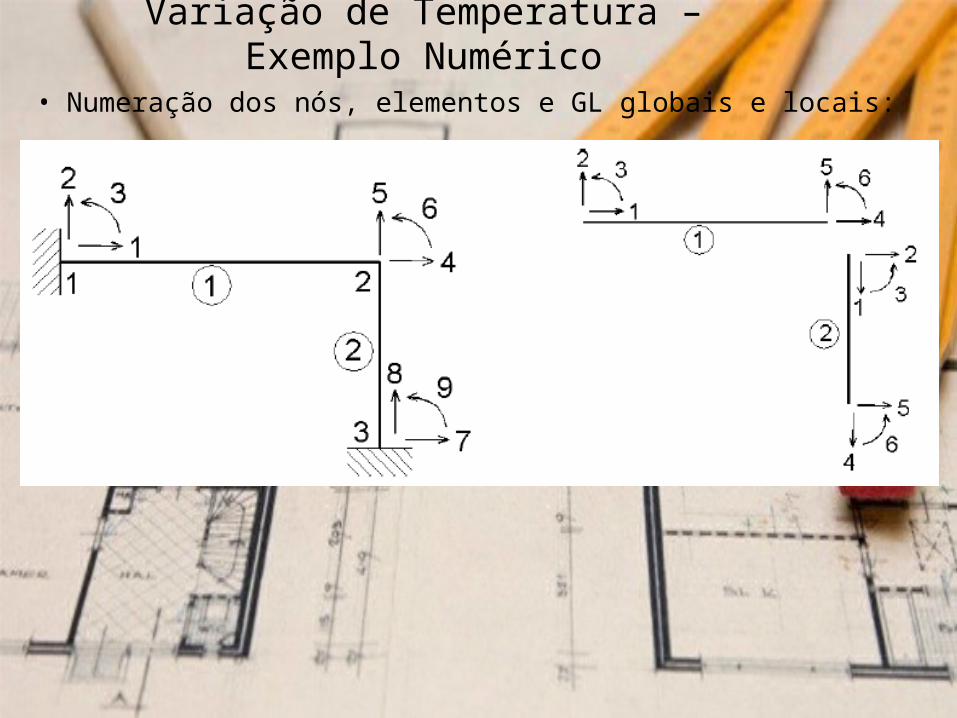
• Numeração dos nós, elementos e GL globais e locais:
Variação de Temperatura – Exemplo Numérico
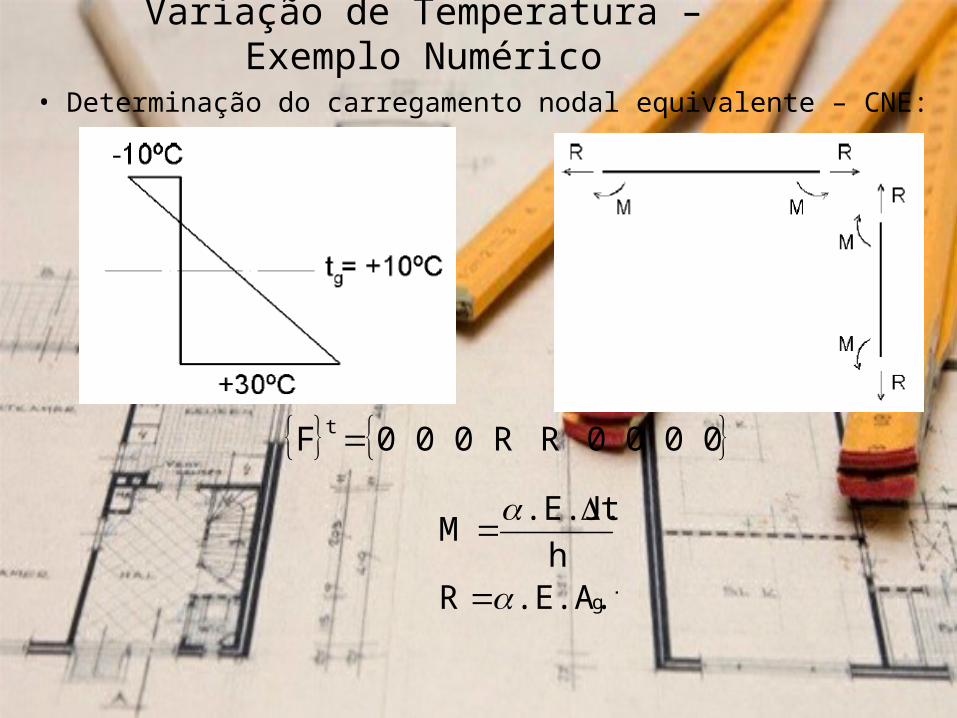
• Determinação do carregamento nodal equivalente – CNE:
Variação de Temperatura – Exemplo Numérico
0 0 0 0 R R 0 0 0 F t
g.E.A.t Rh
t.E.J. M
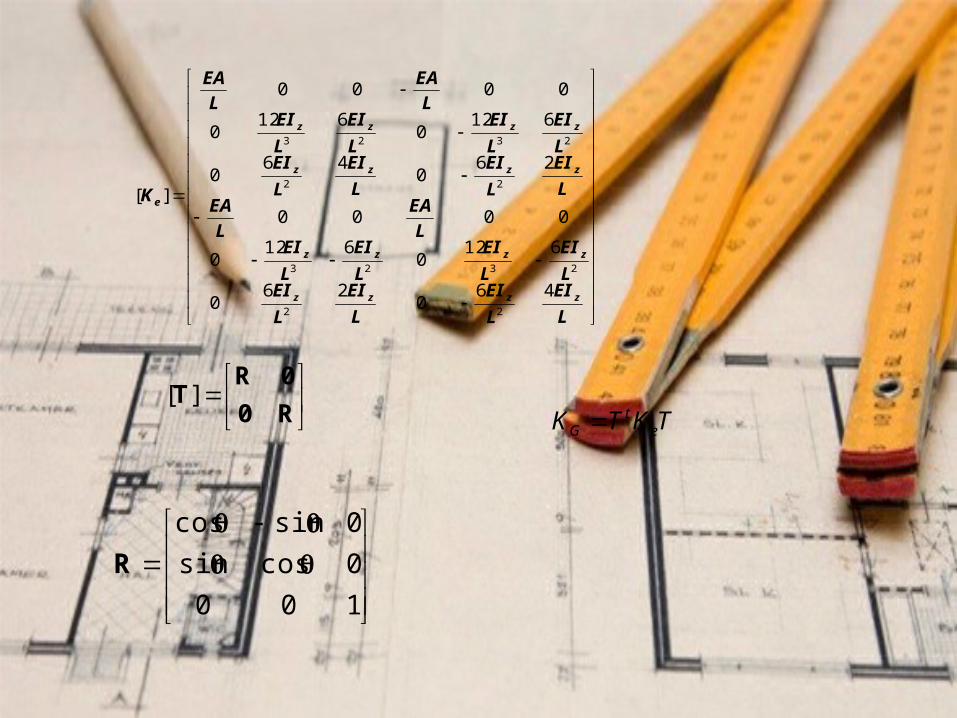
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EA
K
zzzz
zzzz
zzzz
zzzz
e
460
260
6120
6120
0000
260
460
6120
6120
0000
][
22
2323
22
2323
R0
0RT][
100
0cossin
0sincos
R
TKTK et
G
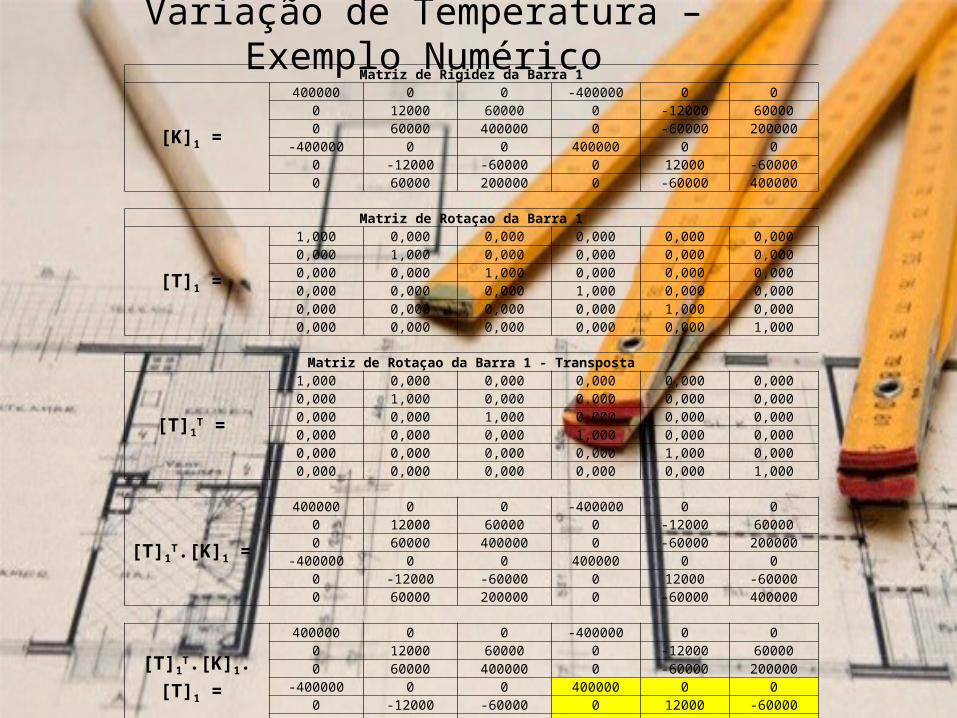
Matriz de Rigidez da Barra 1
[K]1 =
400000 0 0 -400000 0 00 12000 60000 0 -12000 600000 60000 400000 0 -60000 200000
-400000 0 0 400000 0 00 -12000 -60000 0 12000 -600000 60000 200000 0 -60000 400000
Matriz de Rotaçao da Barra 1
[T]1 =
1,000 0,000 0,000 0,000 0,000 0,0000,000 1,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 1,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
Matriz de Rotaçao da Barra 1 - Transposta
[T]1T =
1,000 0,000 0,000 0,000 0,000 0,0000,000 1,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 1,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
[T]1T.[K]1 =
400000 0 0 -400000 0 00 12000 60000 0 -12000 600000 60000 400000 0 -60000 200000
-400000 0 0 400000 0 00 -12000 -60000 0 12000 -600000 60000 200000 0 -60000 400000
[T]1T.[K]1.[T]1 =
400000 0 0 -400000 0 00 12000 60000 0 -12000 600000 60000 400000 0 -60000 200000
-400000 0 0 400000 0 00 -12000 -60000 0 12000 -600000 60000 200000 0 -60000 400000
Variação de Temperatura – Exemplo Numérico
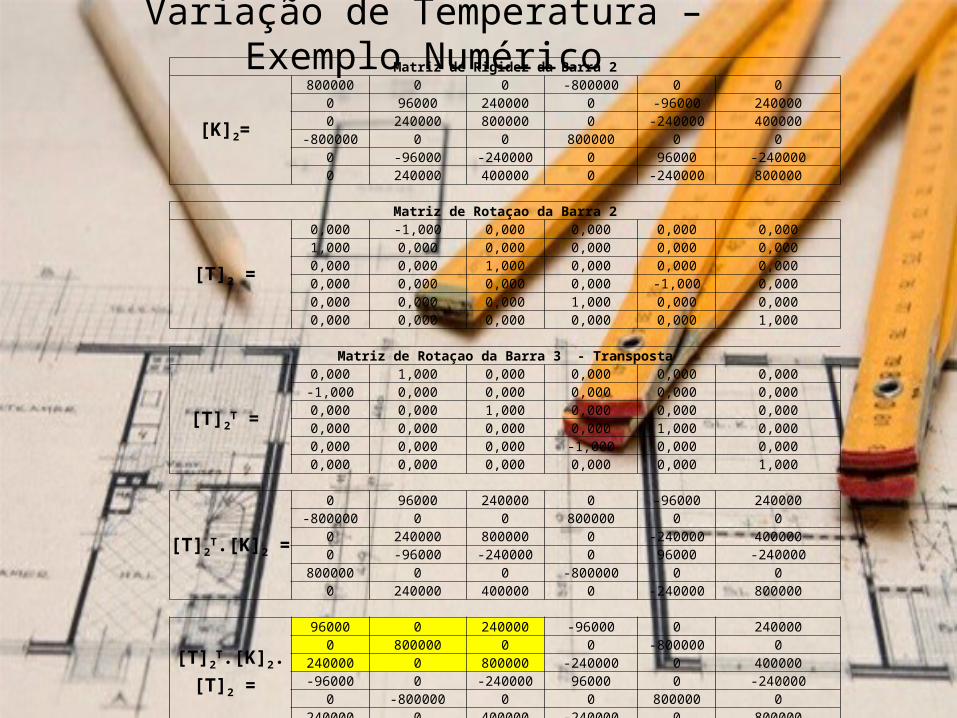
Variação de Temperatura – Exemplo NuméricoMatriz de Rigidez da Barra 2
[K]2=
800000 0 0 -800000 0 00 96000 240000 0 -96000 2400000 240000 800000 0 -240000 400000
-800000 0 0 800000 0 00 -96000 -240000 0 96000 -2400000 240000 400000 0 -240000 800000
Matriz de Rotaçao da Barra 2
[T]2 =
0,000 -1,000 0,000 0,000 0,000 0,0001,000 0,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 0,000 -1,000 0,0000,000 0,000 0,000 1,000 0,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
Matriz de Rotaçao da Barra 3 - Transposta
[T]2T =
0,000 1,000 0,000 0,000 0,000 0,000-1,000 0,000 0,000 0,000 0,000 0,0000,000 0,000 1,000 0,000 0,000 0,0000,000 0,000 0,000 0,000 1,000 0,0000,000 0,000 0,000 -1,000 0,000 0,0000,000 0,000 0,000 0,000 0,000 1,000
[T]2T.[K]2 =
0 96000 240000 0 -96000 240000-800000 0 0 800000 0 0
0 240000 800000 0 -240000 4000000 -96000 -240000 0 96000 -240000
800000 0 0 -800000 0 00 240000 400000 0 -240000 800000
[T]2T.[K]2.[T]2 =
96000 0 240000 -96000 0 2400000 800000 0 0 -800000 0
240000 0 800000 -240000 0 400000-96000 0 -240000 96000 0 -240000
0 -800000 0 0 800000 0240000 0 400000 -240000 0 800000
Variação de Temperatura – Exemplo Numérico
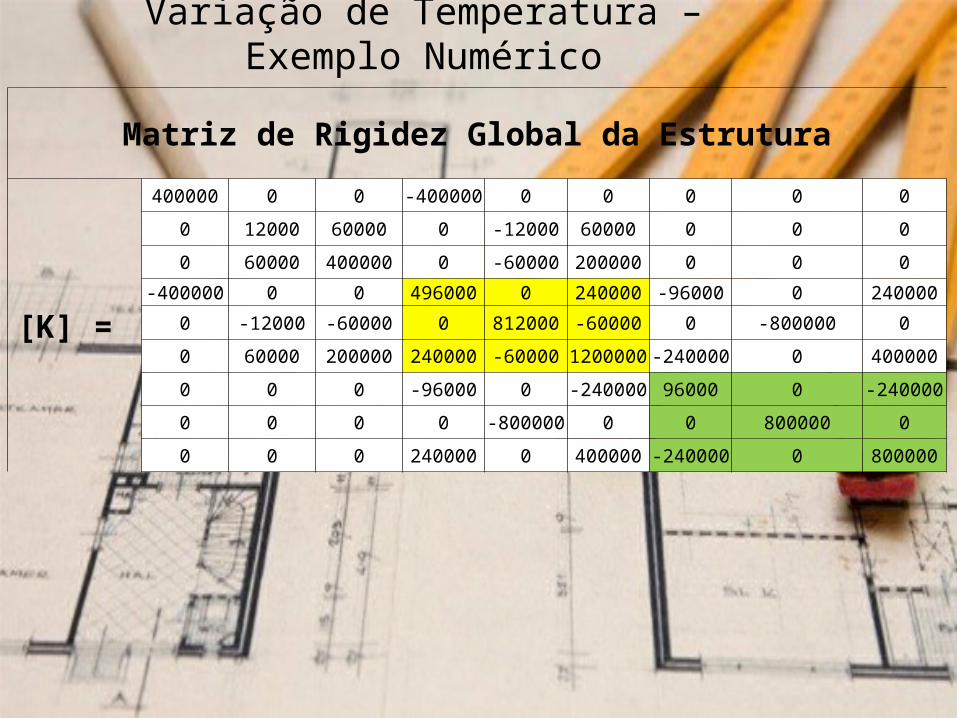
Matriz de Rigidez Global da Estrutura
[K] =
400000 0 0 -400000 0 0 0 0 0
0 12000 60000 0 -12000 60000 0 0 0
0 60000 400000 0 -60000 200000 0 0 0
-400000 0 0 496000 0 240000 -96000 0 240000
0 -12000 -60000 0 812000 -60000 0 -800000 0
0 60000 200000 240000 -60000 1200000 -240000 0 400000
0 0 0 -96000 0 -240000 96000 0 -240000
0 0 0 0 -800000 0 0 800000 0
0 0 0 240000 0 400000 -240000 0 800000
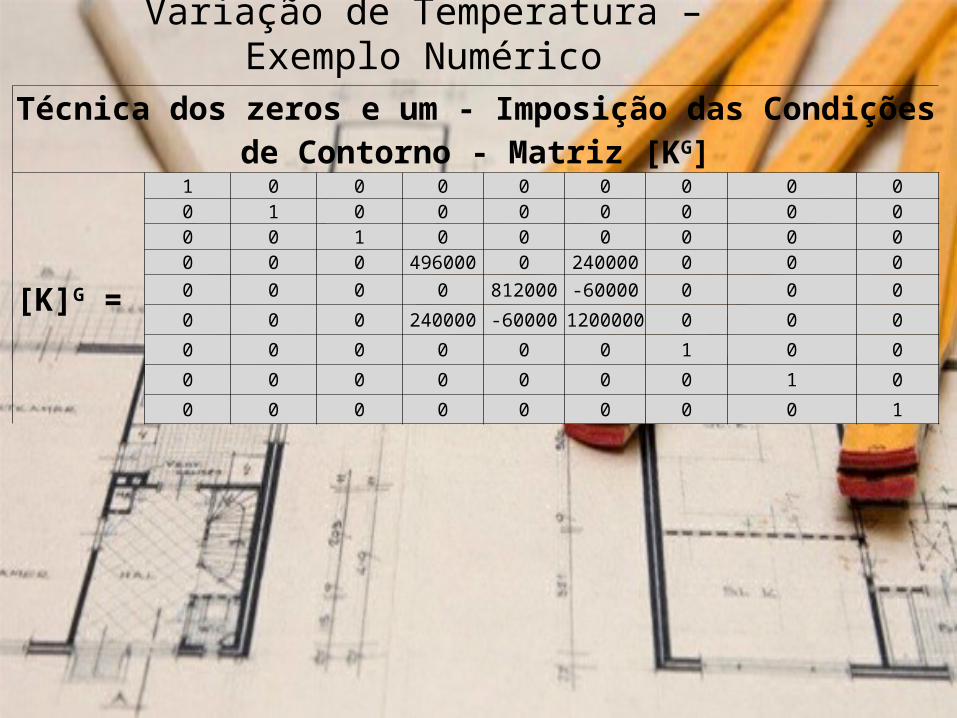
Variação de Temperatura – Exemplo Numérico
Técnica dos zeros e um - Imposição das Condições de Contorno - Matriz [KG]
[K]G =
1 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 00 0 1 0 0 0 0 0 00 0 0 496000 0 240000 0 0 00 0 0 0 812000 -60000 0 0 0
0 0 0 240000 -60000 1200000 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 1
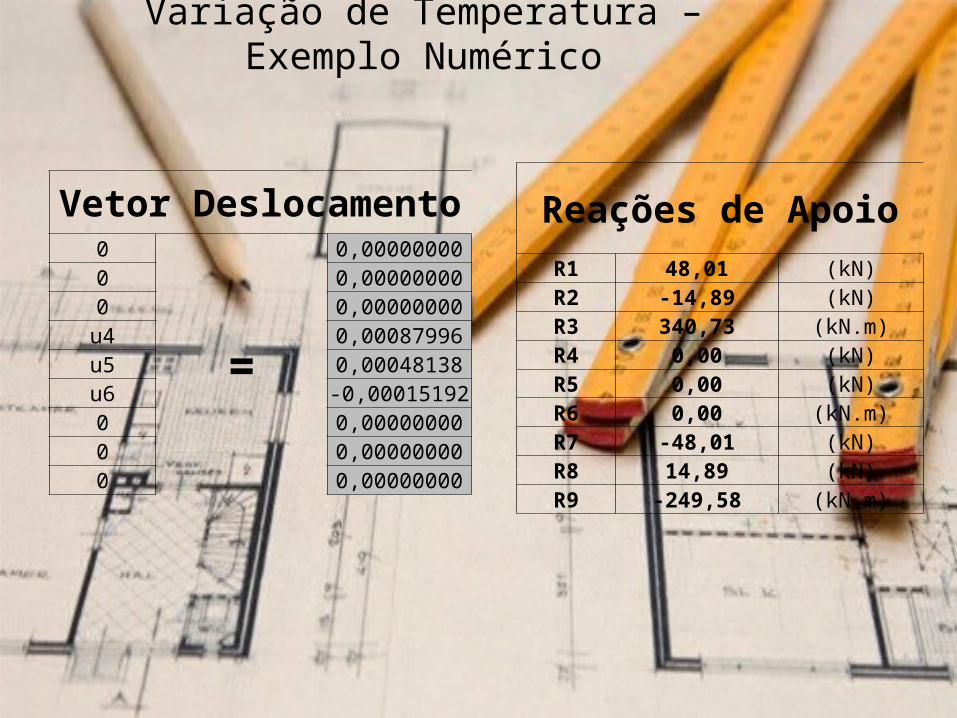
Vetor Deslocamento0
=
0,000000000 0,000000000 0,00000000
u4 0,00087996u5 0,00048138u6 -0,000151920 0,000000000 0,000000000 0,00000000
Reações de ApoioR1 48,01 (kN)R2 -14,89 (kN)R3 340,73 (kN.m)R4 0,00 (kN)R5 0,00 (kN)R6 0,00 (kN.m)R7 -48,01 (kN)R8 14,89 (kN)R9 -249,58 (kN.m)
Variação de Temperatura – Exemplo Numérico
Variação de Temperatura – Exemplo Numérico
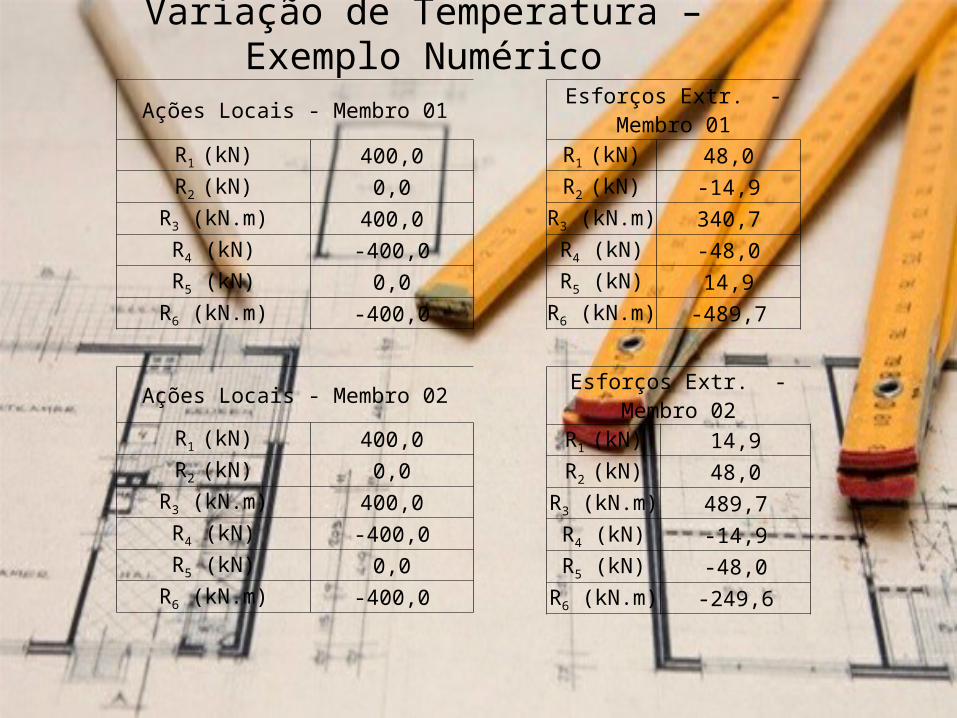
Ações Locais - Membro 01
R1 (kN) 400,0R2 (kN) 0,0
R3 (kN.m) 400,0R4 (kN) -400,0R5 (kN) 0,0
R6 (kN.m) -400,0
Esforços Extr. - Membro 01
R1 (kN) 48,0R2 (kN) -14,9
R3 (kN.m) 340,7R4 (kN) -48,0R5 (kN) 14,9
R6 (kN.m) -489,7
Ações Locais - Membro 02
R1 (kN) 400,0R2 (kN) 0,0
R3 (kN.m) 400,0R4 (kN) -400,0R5 (kN) 0,0
R6 (kN.m) -400,0
Esforços Extr. - Membro 02
R1 (kN) 14,9R2 (kN) 48,0
R3 (kN.m) 489,7R4 (kN) -14,9R5 (kN) -48,0
R6 (kN.m) -249,6
Variação de Temperatura – Exemplo Numérico
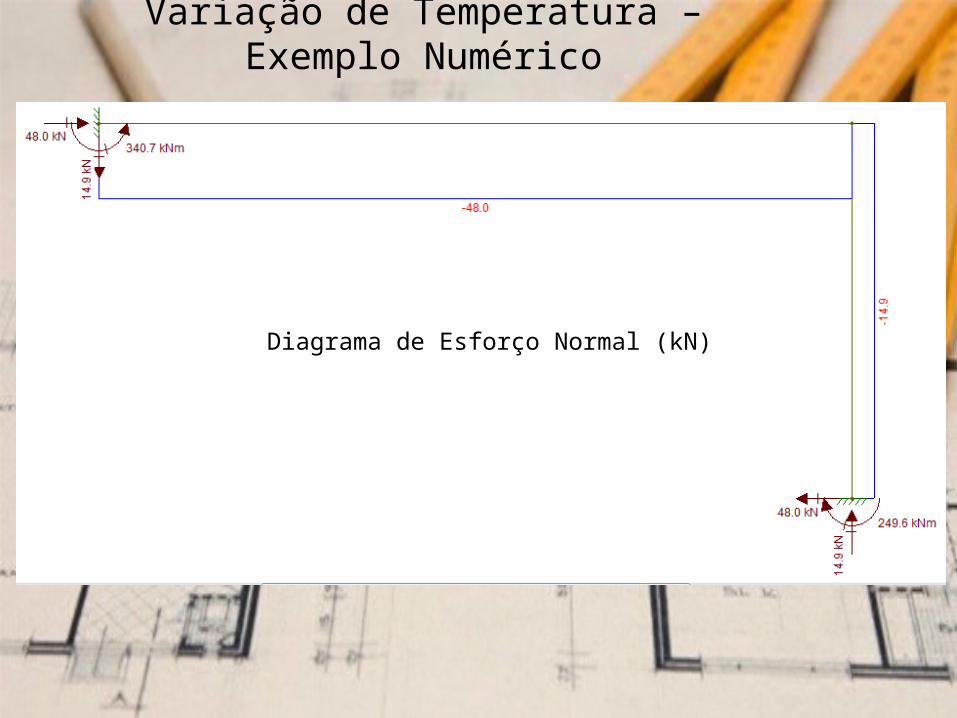
Variação de Temperatura – Exemplo Numérico
Diagrama de Esforço Normal (kN)
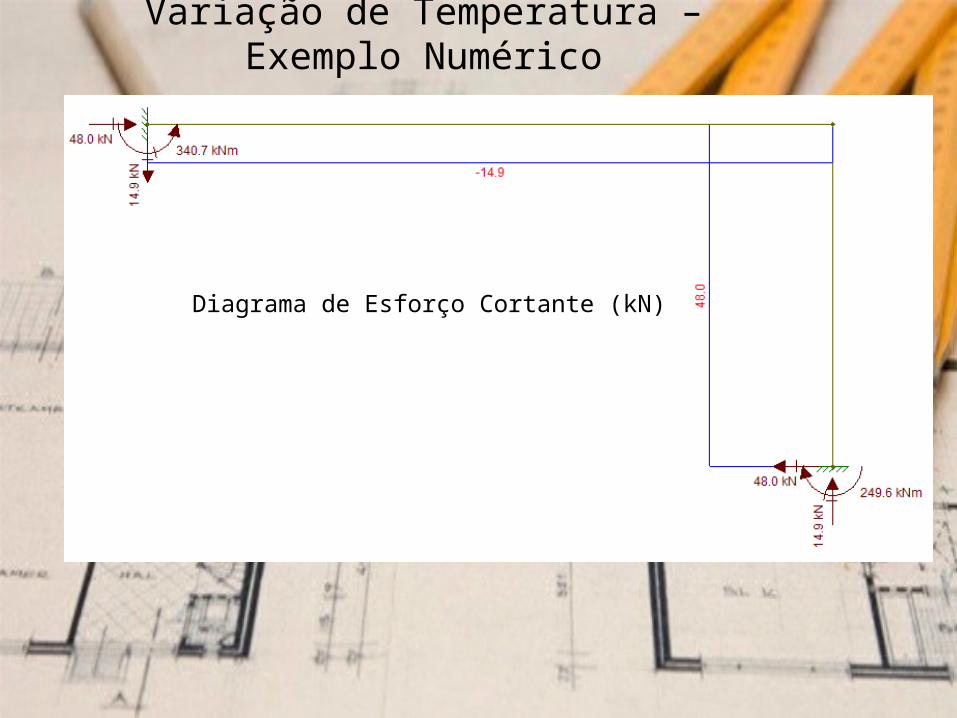
Diagrama de Esforço Cortante (kN)
Variação de Temperatura – Exemplo Numérico
Variação de Temperatura – Exemplo Numérico
Diagrama de Momento Fletor (kN.m)
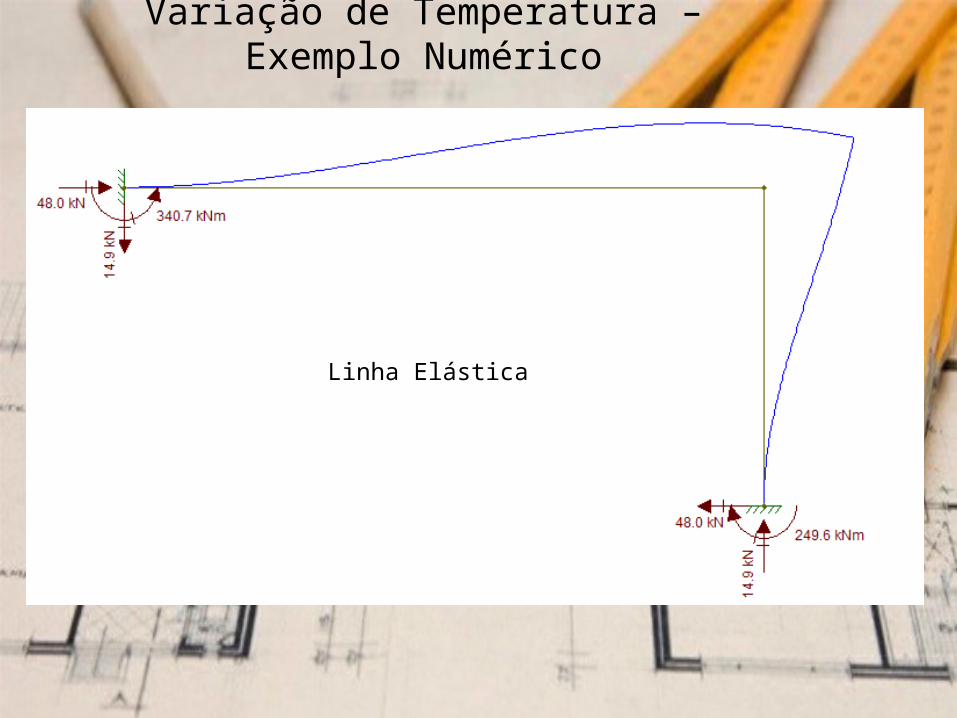
Linha Elástica
Variação de Temperatura – Exemplo Numérico
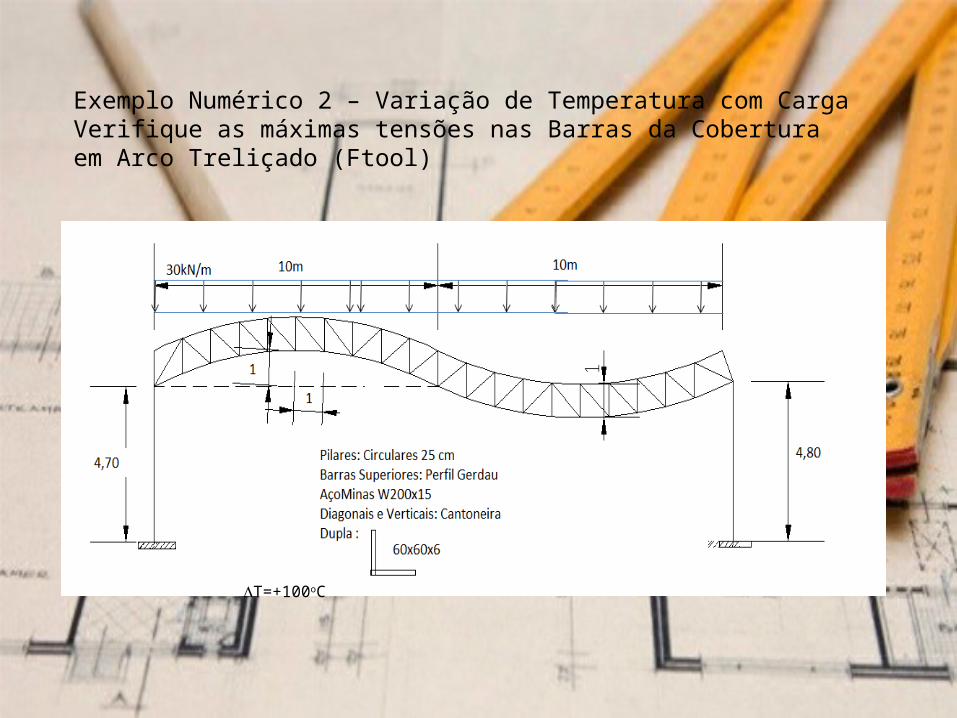
DT=+100oC
Exemplo Numérico 2 – Variação de Temperatura com CargaVerifique as máximas tensões nas Barras da Cobertura em Arco Treliçado (Ftool)
66
3.1 Coeficiente γz
dtot
dtotz
M
M
,,1
,1
1
M1, tot, d: momento de tombamento, ou seja, a soma de todos os momentos de todas as forças horizontais da combinação considerada, com seus valores de cálculo, em relação à base da estrutura;∆M tot, d: é a soma dos produtos de todas as forças verticais atuantes na estrutura, na combinação considerada, com seus valores de cálculo, pelos deslocamentos horizontais de seus respectivos pontos de aplicação, obtida da análise de 1ª ordem.
Análise de Instabilidade
Por conveniência de análise, a NBR 6118:2007, em seu item 15.4.2, permite classificar as estruturas em estruturas de nós fixos e estruturas de nós móveis (estruturas deslocáveis). As primeiras são aquelas nas quais os efeitos globais de 2ª ordem são desprezíveis e podem ser desconsiderados (inferiores a 10% dos respectivos esforços de 1ª ordem). Nessas estruturas, permite-se considerar apenas os efeitos locais de 2ª ordem. Já as estruturas de nós móveis são aquelas nas quais os efeitos globais de 2ª ordem são importantes (superiores a 10% dos respectivos esforços de 1ª ordem). Nelas, devem ser obrigatoriamente considerados tanto os esforços de 2ª ordem globais como os locais. gz <1.1 estrutura indeslocável
Em geral as lajes formam septos e portanto os deslocamentos horizontais dos andares são os mesmos para todas as cargas verticais no mesmo pavimento..
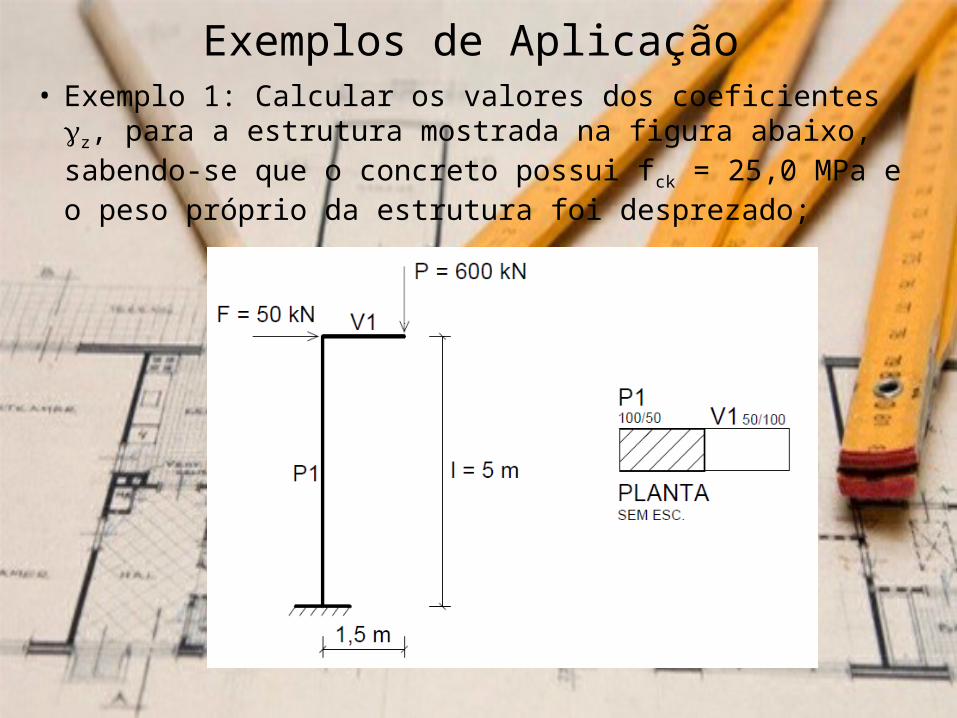
Exemplos de Aplicação• Exemplo 1: Calcular os valores dos coeficientes z, para a
estrutura mostrada na figura abaixo, sabendo-se que o concreto possui fck = 25,0 MPa e o peso próprio da estrutura foi desprezado;
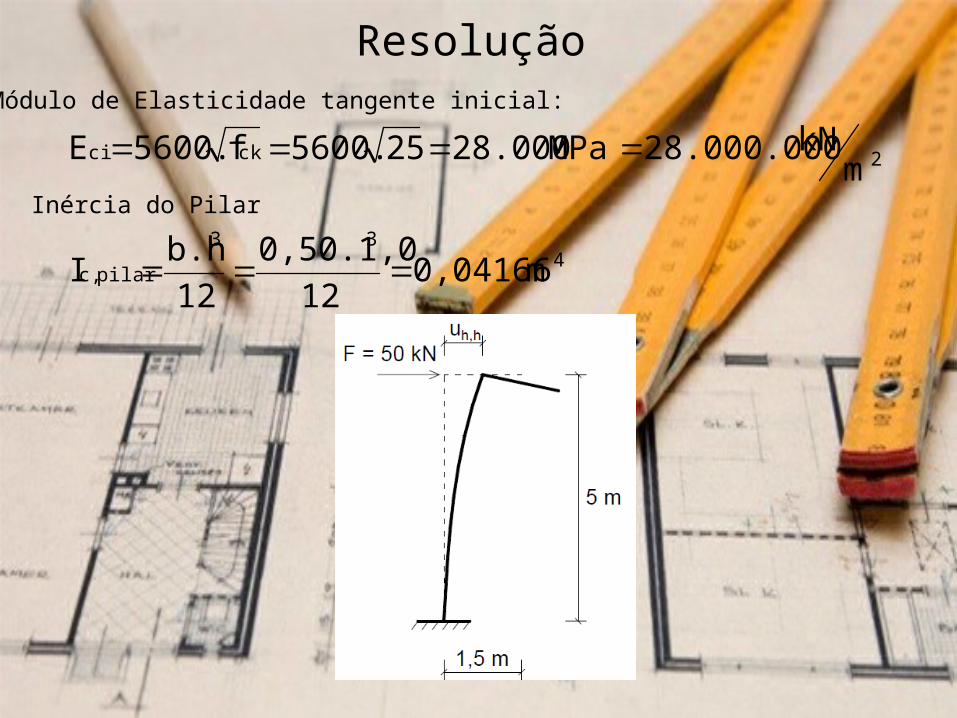
ResoluçãoMódulo de Elasticidade tangente inicial:
2ckcim
kN 28.000.000 MPa 28.000 255600. f5600. E
Inércia do Pilar
m 0,04166 12
0,50.1,0
12
b.h I 4
33
pilarc,
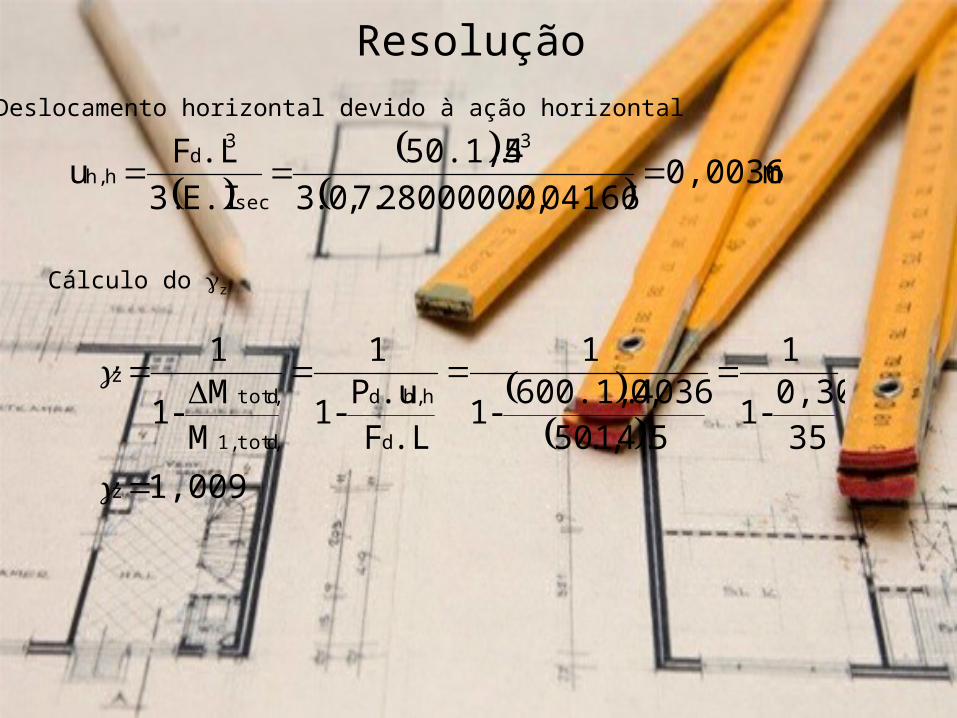
Deslocamento horizontal devido à ação horizontal
m 0,0036 04166,0.28000000.7,0.3
5.50.1,4
E.I3.
.LF u
3
sec
3d
hh,
Cálculo do z
1,009
350,30
-1
1
5.4,1.50036,0.600.1,4
-1
1
.LF.uP
-1
1
MM
-1
1
z
d
hh,d
dtot,1,
dtot,z
Resolução
71
3.1.1 Processo P 1. Primeiramente, faz-se a análise de primeira ordem da estrutura, calculando-se os
deslocamentos considerando a posição indeformada da estrutura. A partir da análise de
primeira ordem, determinam-se os deslocamentos relativos entre os pavimentos;
2. Com os valores dos deslocamentos relativos entre os pavimentos, são obtidos os
momentos proporcionais em virtude das ações das forças verticais atuantes nos nós;
3. Os momentos obtidos, então, são substituídos por binários equivalentes constituídos
de forças horizontais, cujas resultantes são denominadas forças horizontais fictícias,
cujos valores podem ser obtidos a partir da Expressão 3.13:
1
11
i
ii
i
iii h
dV
h
dVH (3.13)
1. Primeiramente, faz-se a análise de primeira ordem da estrutura, calculando-se os
deslocamentos considerando a posição indeformada da estrutura. A partir da análise de
primeira ordem, determinam-se os deslocamentos relativos entre os pavimentos;
2. Com os valores dos deslocamentos relativos entre os pavimentos, são obtidos os
momentos proporcionais em virtude das ações das forças verticais atuantes nos nós;
3. Os momentos obtidos, então, são substituídos por binários equivalentes constituídos
de forças horizontais, cujas resultantes são denominadas forças horizontais fictícias,
cujos valores podem ser obtidos a partir da Expressão 3.13:
1
11
i
ii
i
iii h
dV
h
dVH (3.13)
1. Primeiramente, faz-se a análise de primeira ordem da estrutura, calculando-se os
deslocamentos considerando a posição indeformada da estrutura. A partir da análise de
primeira ordem, determinam-se os deslocamentos relativos entre os pavimentos;
2. Com os valores dos deslocamentos relativos entre os pavimentos, são obtidos os
momentos proporcionais em virtude das ações das forças verticais atuantes nos nós;
3. Os momentos obtidos, então, são substituídos por binários equivalentes constituídos
de forças horizontais, cujas resultantes são denominadas forças horizontais fictícias,
cujos valores podem ser obtidos a partir da Expressão 3.13:
1
11
i
ii
i
iii h
dV
h
dVH (3.13)
Onde:
Vi, Vi+1: forças verticais acumuladas até os pavimentos i e i+1, respectivamente;
hi, hi+1: pés-direitos dos pavimentos i e i+1, respectivamente;
di, di+1: deslocamentos horizontais relativos do pavimento i em relação ao
pavimento i-1 e do pavimento i+1 em relação i+1 em relação ao pavimento i,
respectivamente.
72
1. As forças horizontais obtidas devem ser, então, adicionadas às forças horizontais
atuantes nos nós da estrutura, e então é realizada a segunda iteração, e o processo é,
então, repetido. Salienta-se que, a cada iteração, as forças horizontais modificadas
resultam do somatório entre as forças horizontais iniciais e as forças horizontais
fictícias obtidas na referida iteração;
2. O processo deve ser repetido, segundo MacGregor (1988, apud LIMA, 2001),
enquanto os deslocamentos de uma referida iteração excederem em mais de 5% da
iteração anterior.
1. As forças horizontais obtidas devem ser, então, adicionadas às forças horizontais
atuantes nos nós da estrutura, e então é realizada a segunda iteração, e o processo é,
então, repetido. Salienta-se que, a cada iteração, as forças horizontais modificadas
resultam do somatório entre as forças horizontais iniciais e as forças horizontais
fictícias obtidas na referida iteração;
2. O processo deve ser repetido, segundo MacGregor (1988, apud LIMA, 2001),
enquanto os deslocamentos de uma referida iteração excederem em mais de 5% da
iteração anterior.
73
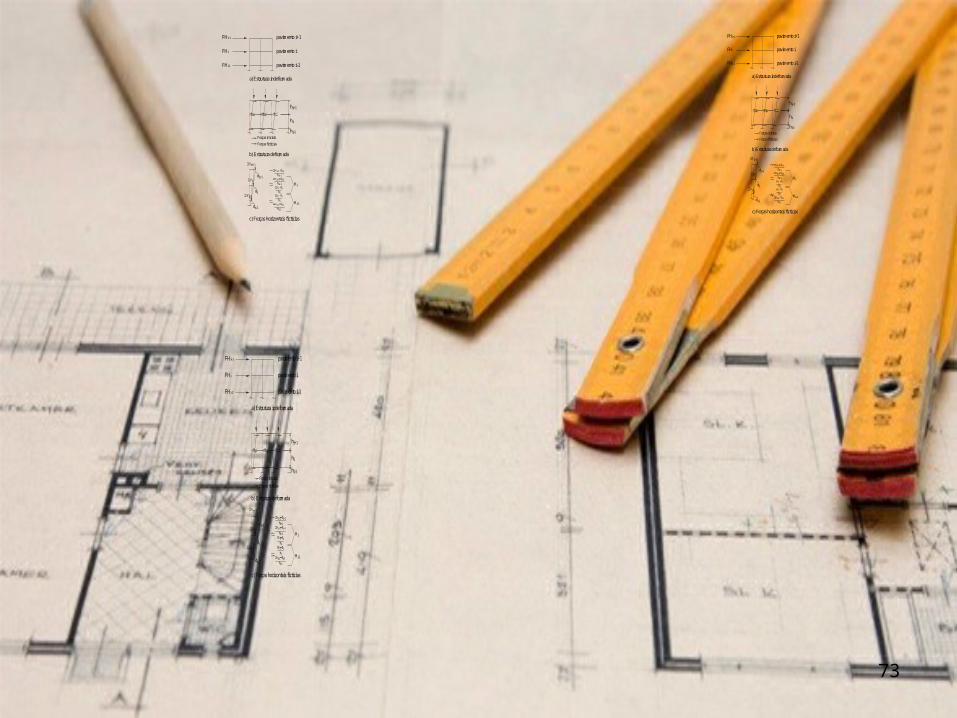
FHi+1
iFH
FHi-1
pavimento i+1
pavimento i
pavimento i-1
Forças iniciais
Forças fictícias
hi+1
ih
hi-1
di+1
id
di-1
Vi+1
iV
Vi-1
i+1V i+1d
i+1h
hi+1
di+1Vi+1
iV id
ih
hi
diVi
i-1V i-1d
i-1h
Hi
i-1H
a) Estrutura indeformada
b) Estrutura deformada
c) Forças horizontais fictícias
FHi+1
iFH
FHi-1
pavimento i+1
pavimento i
pavimento i-1
Forças iniciais
Forças fictícias
hi+1
ih
hi-1
di+1
id
di-1
Vi+1
iV
Vi-1
i+1V i+1d
i+1h
hi+1
di+1Vi+1
iV id
ih
hi
diVi
i-1V i-1d
i-1h
Hi
i-1H
a) Estrutura indeformada
b) Estrutura deformada
c) Forças horizontais fictícias
FHi+1
iFH
FHi-1
pavimento i+1
pavimento i
pavimento i-1
Forças iniciais
Forças fictícias
hi+1
ih
hi-1
di+1
id
di-1
Vi+1
iV
Vi-1
i+1V i+1d
i+1h
hi+1
di+1Vi+1
iV id
ih
hi
diVi
i-1V i-1d
i-1h
Hi
i-1H
a) Estrutura indeformada
b) Estrutura deformada
c) Forças horizontais fictícias
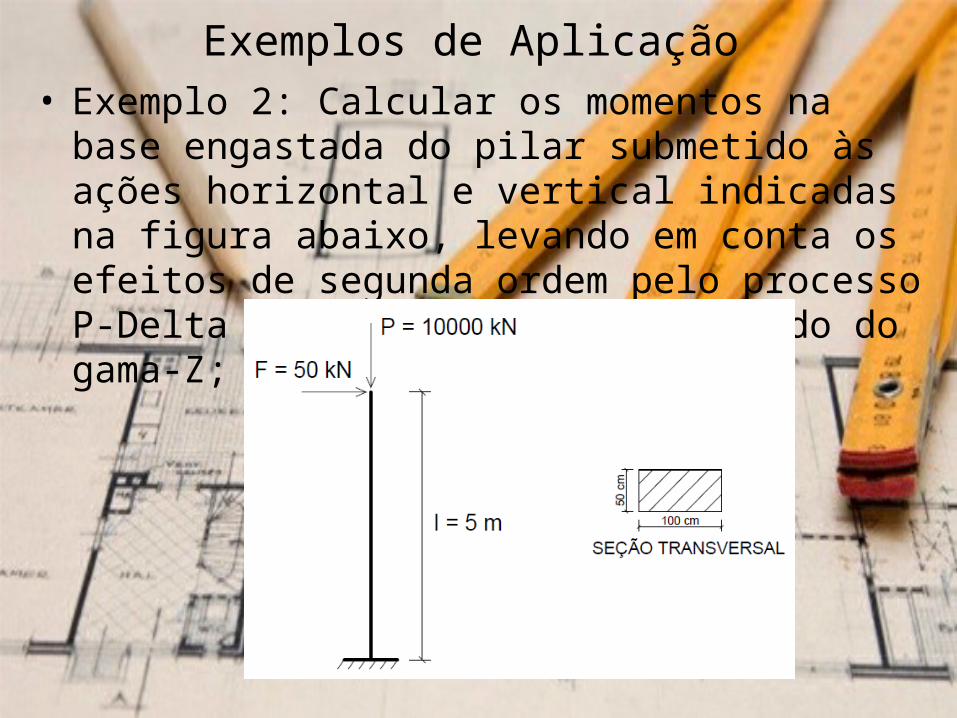
Exemplos de Aplicação• Exemplo 2: Calcular os momentos na base engastada do
pilar submetido às ações horizontal e vertical indicadas na figura abaixo, levando em conta os efeitos de segunda ordem pelo processo P-Delta e pelo método simplificado do gama-Z;
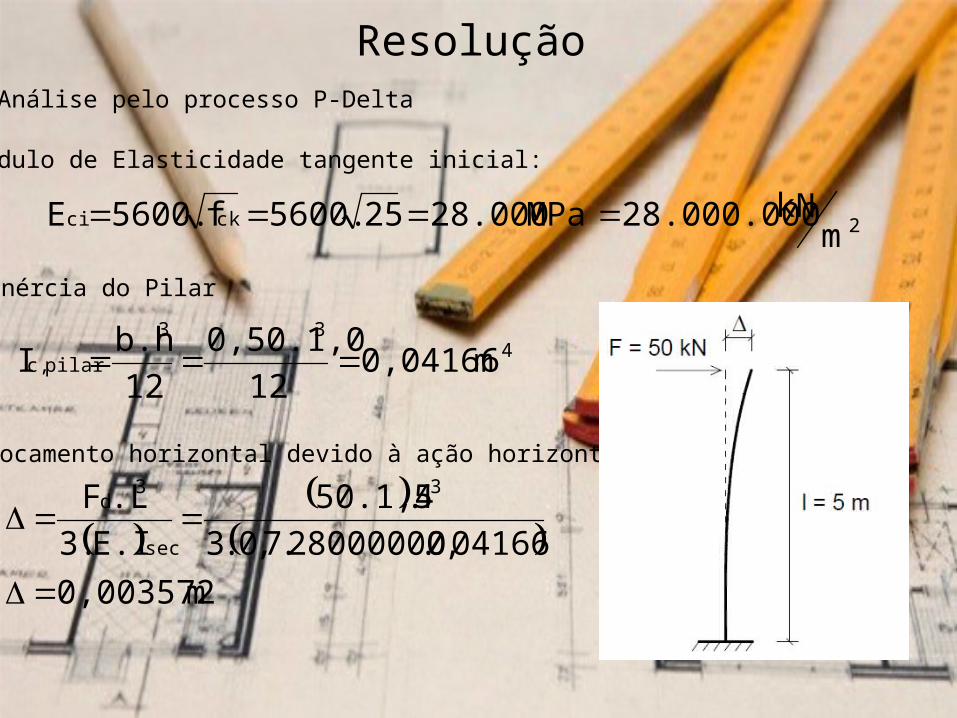
ResoluçãoAnálise pelo processo P-Delta
Módulo de Elasticidade tangente inicial:
2ckcim
kN 28.000.000 MPa 28.000 255600. f5600. E
Inércia do Pilar
m 0,04166 12
0,50.1,0
12
b.h I 4
33
pilarc,
Deslocamento horizontal devido à ação horizontal
m 0,003572
04166,0.28000000.7,0.3
5.50.1,4
E.I3.
.LF
3
sec
3d
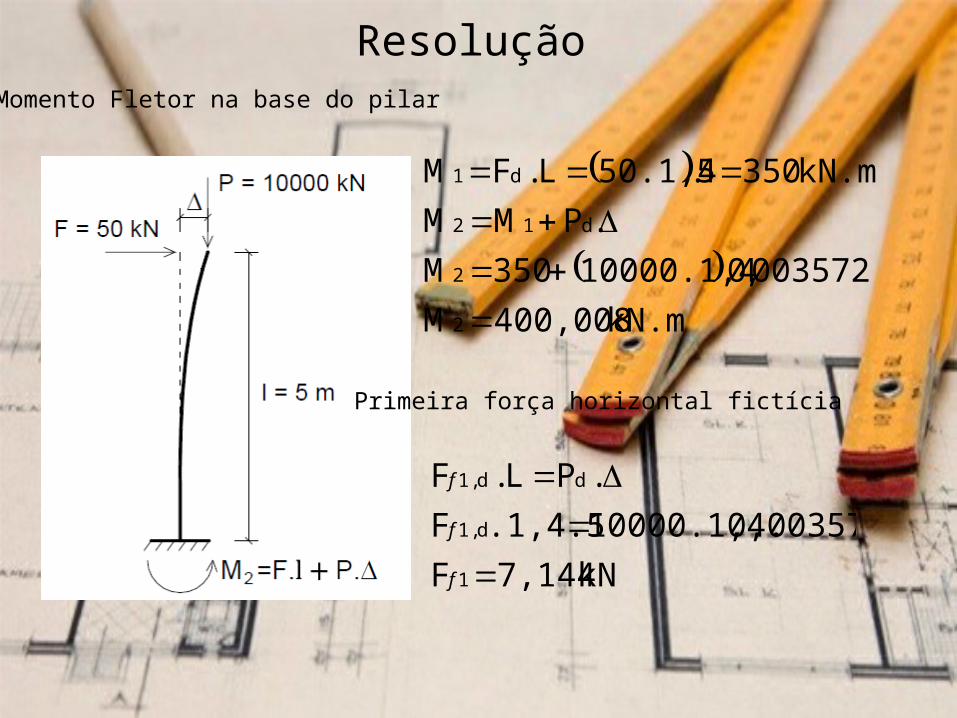
ResoluçãoMomento Fletor na base do pilar
kN.m 400,008 M
003572,0.10000.1,4 350 M
.P M M
kN.m 350 5.50.1,4 L . F M
2
2
d12
d1
Primeira força horizontal fictícia
kN 7,144 F
0,00357210000.1,4. .1,4.5F
. P L . F
1
d1,
dd1,
f
f
f
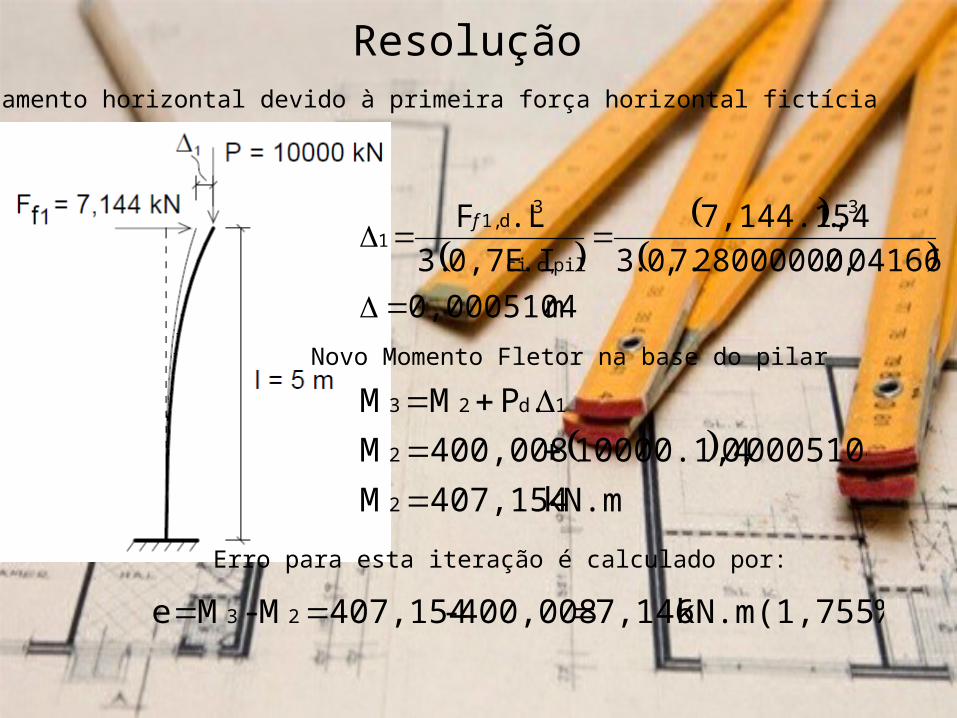
ResoluçãoDeslocamento horizontal devido à primeira força horizontal fictícia
m 0,0005104
04166,0.28000000.7,0.3
5.7,144.1,4
.I0,7E3.
.LF
3
pilc,ci
3d1,
1
f
Novo Momento Fletor na base do pilar
kN.m 407,154 M
0005104,0.10000.1,4 400,008 M
.P M M
2
2
1d23
Erro para esta iteração é calculado por:
(1,755%) kN.m 7,146 400,008 - 407,154 M - M e 23
ResoluçãoSegunda força horizontal fictícia
kN 1,021 F
1,4.5
0,000510410000.1,4. F
0,000510410000.1,4. .1,4.5F
Δ . P L . F
f2
f2
f2
1ddf2,
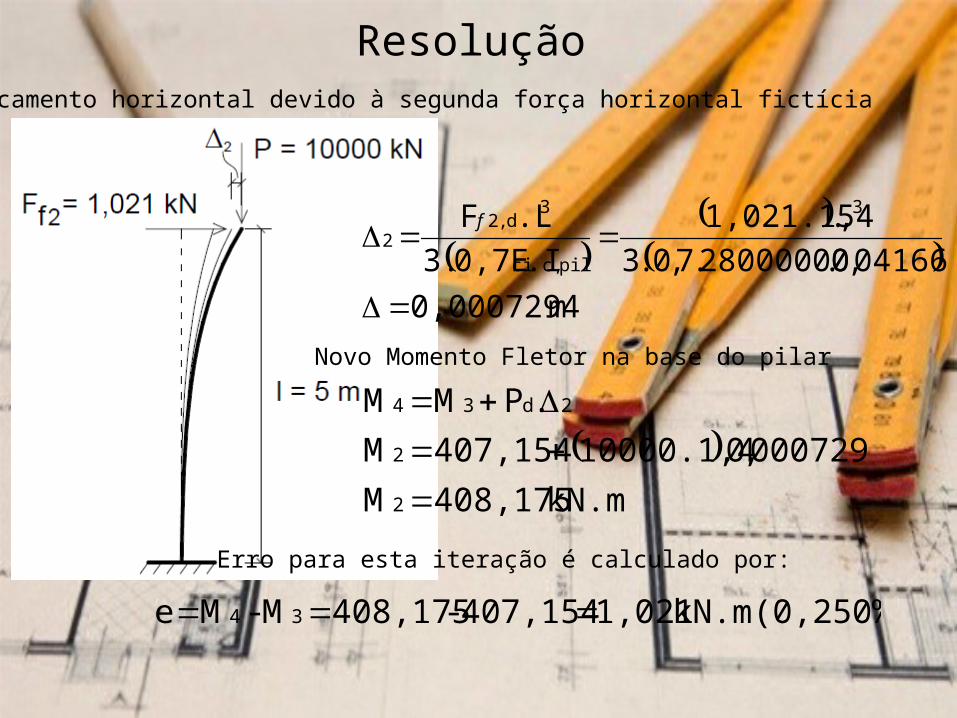
Deslocamento horizontal devido à segunda força horizontal fictícia
Resolução
m 0,0007294
04166,0.28000000.7,0.3
5.1,021.1,4
.I0,7E3.
.LF
3
pilc,ci
3d,2
2
f
Novo Momento Fletor na base do pilar
kN.m 408,175 M
0007294,0.10000.1,4 407,154 M
.P M M
2
2
2d34
Erro para esta iteração é calculado por:
(0,250%) kN.m 1,021 407,154 - 408,175 M - M e 34
ResoluçãoTerceira força horizontal fictícia
kN 0,146 F
1,4.5
0,000729410000.1,4. F
0,000729410000.1,4. .1,4.5F
. P L . F
f2
f2
df3,
2ddf3,
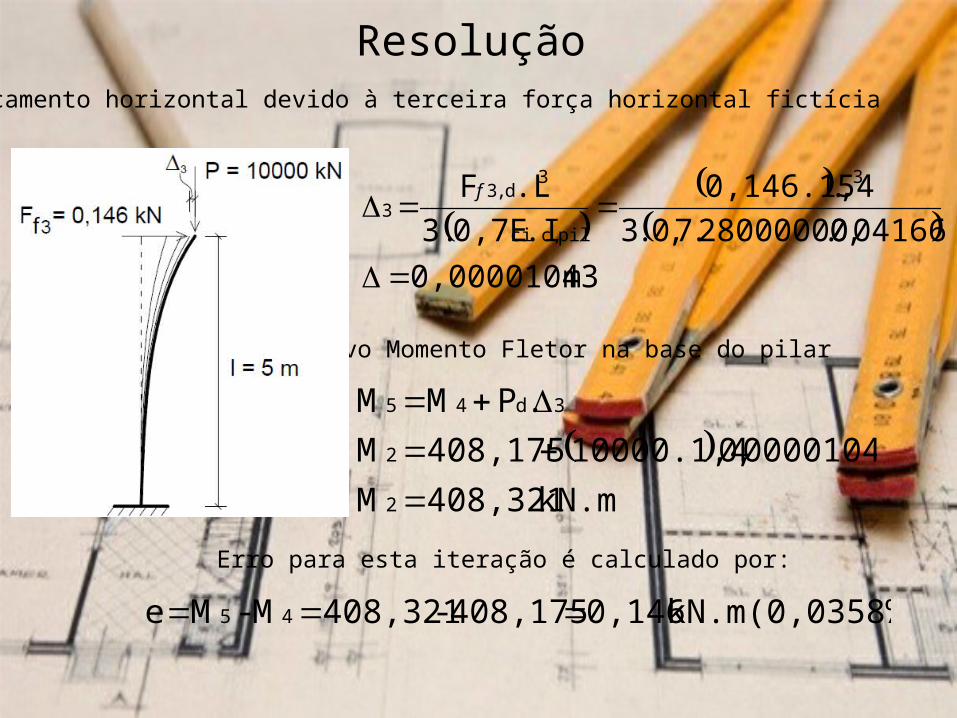
Deslocamento horizontal devido à terceira força horizontal fictícia
Resolução
m 0,00001043
04166,0.28000000.7,0.3
5.0,146.1,4
.I0,7E3.
.LF
3
pilc,ci
3d,3
3
f
Novo Momento Fletor na base do pilar
kN.m 408,321 M
00001043,0.10000.1,4 408,175 M
.P M M
2
2
3d45
Erro para esta iteração é calculado por:
(0,0358%) kN.m 0,146 408,175 - 408,321 M - M e 45
ResoluçãoQuarta força horizontal fictícia
kN 0,021 F
1,4.5
0,0000104310000.1,4. F
0,0000104310000.1,4. .1,4.5F
. P L . F
f2
f2
4f
3dd,4f
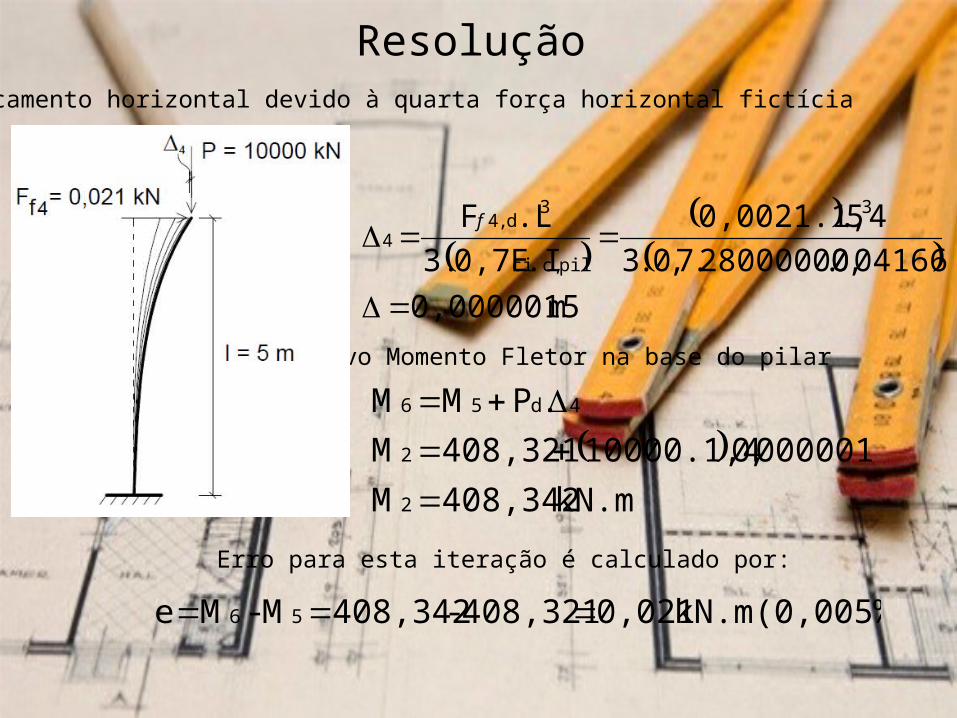
Deslocamento horizontal devido à quarta força horizontal fictícia
Resolução
m 0,0000015
04166,0.28000000.7,0.3
5.0,0021.1,4
.I0,7E3.
.LF
3
pilc,ci
3d,4
4
f
Novo Momento Fletor na base do pilar
kN.m 408,342 M
0000015,0.10000.1,4 408,321 M
.P M M
2
2
4d56
Erro para esta iteração é calculado por:
(0,005%) kN.m 0,021 408,321 - 408,342 M - M e 56
• As iterações foram realizadas até que o valor do erro fosse em torno de 0,01% do momento de iteração anterior;
• A última iteração na qual se tem um erro de apenas 0,005%, sendo assim, considera-se M6 = 408,342 kN.m, o valor final do momento na base do pilar, obtido pelo processo P-Delta;
Resolução
• Majoração do esforço horizontal com 0,95.z
– Segundo o item 15.7.2 da NBR 6118:2003, uma solução aproximada para a determinação dos esforços finais (1ª ordem + 2ª ordem) consiste em multiplicar os esforços horizontais da combinação de carregamento considerada por 0,95.z , sendo esse processo válido somente para z ≤ 1,3;
– Para este caso, será majorada diretamente a ação F, por ser a única ação horizontal;
Análise pelo Método Simplificado do Gama-z
kN 55,43 F
0,95.1,16750. F
0,95.F. F
maj
maj
zmaj
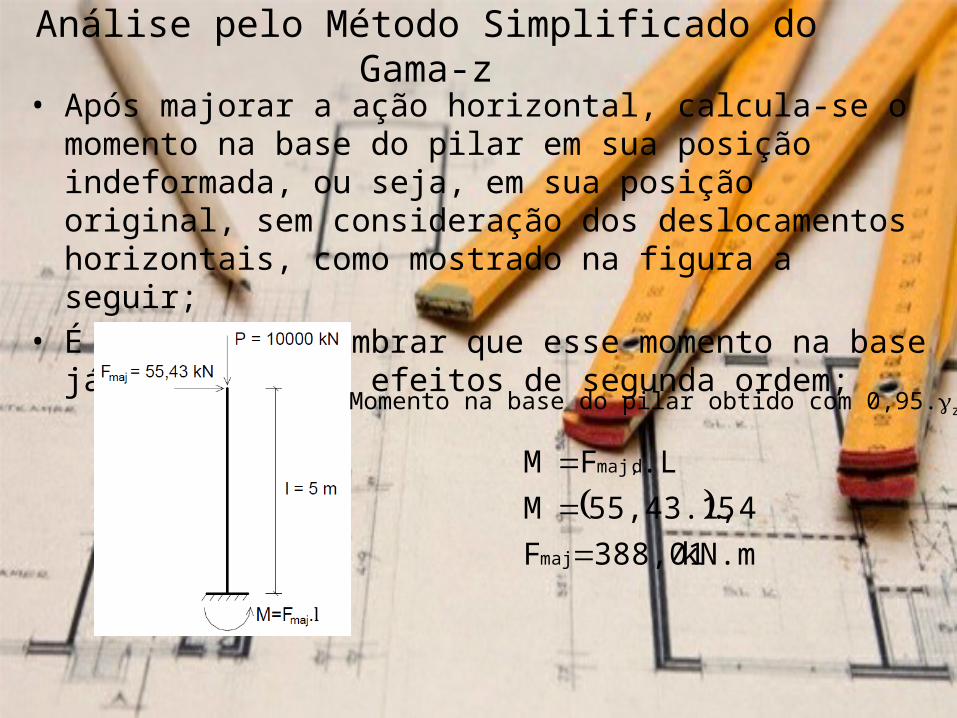
• Após majorar a ação horizontal, calcula-se o momento na base do pilar em sua posição indeformada, ou seja, em sua posição original, sem consideração dos deslocamentos horizontais, como mostrado na figura a seguir;
• É importante lembrar que esse momento na base já considera os efeitos de segunda ordem;
Análise pelo Método Simplificado do Gama-z
kN.m 388,01 F
5.55,43.1,4 M
.LF M
maj
dmaj,
Momento na base do pilar obtido com 0,95.z
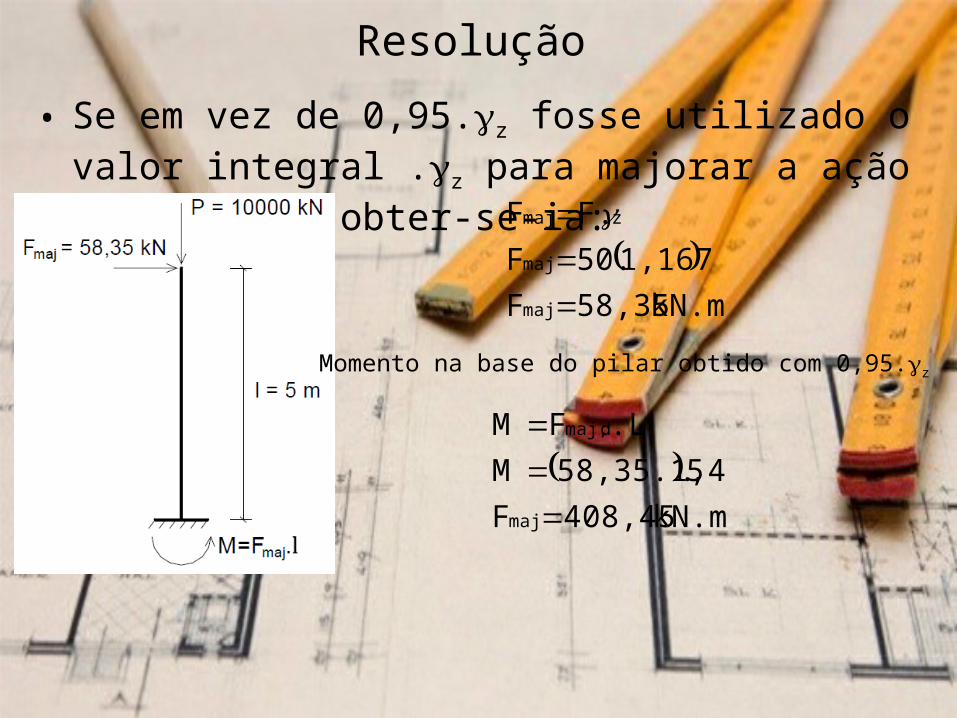
• Se em vez de 0,95.z fosse utilizado o valor integral .z para majorar a ação horizontal, obter-se-ia:
Resolução
kN.m 58,35 F
1,16750. F
F. F
maj
maj
zmaj
kN.m 408,45 F
5.58,35.1,4 M
.LF M
maj
dmaj,
Momento na base do pilar obtido com 0,95.z
• Este exemplo foi utilizado apenas para mostrar os conceitos do processo P-Delta e do Gama-z, de forma simples e didática;
• Não se pode esquecer que a NBR 6118:2003 prescreve que, para utilização do coeficiente Gama-z em edificações, são necessários no mínimo quatro pavimentos;
• No exemplo, pode-se observar que o momento obtido na base do pilar utilizando-se o P-Delta (408,34 kN.m) ficou bem próximo do relativo ao valor integral do Gama-z (408,45 kN.m);
Comparação entre o processo P-Delta e o Gama-z
• O resultado correspondente a 0,95.z (388,01 kN.m), como permite a NBR 6118:2003, foi aproximadamente 5% menor que o obtido pelo processo P-Delta;
• Vale ressaltar que para a dedução do coeficiente Gama-z, que se considera que os acréscimos de momento fletor a cada iteração diminuem segundo uma progressão geométrica de razão r;
• Com este simples exemplo calculado pelo P-Delta, pode-se perceber que realmente essa hipótese se verifica;
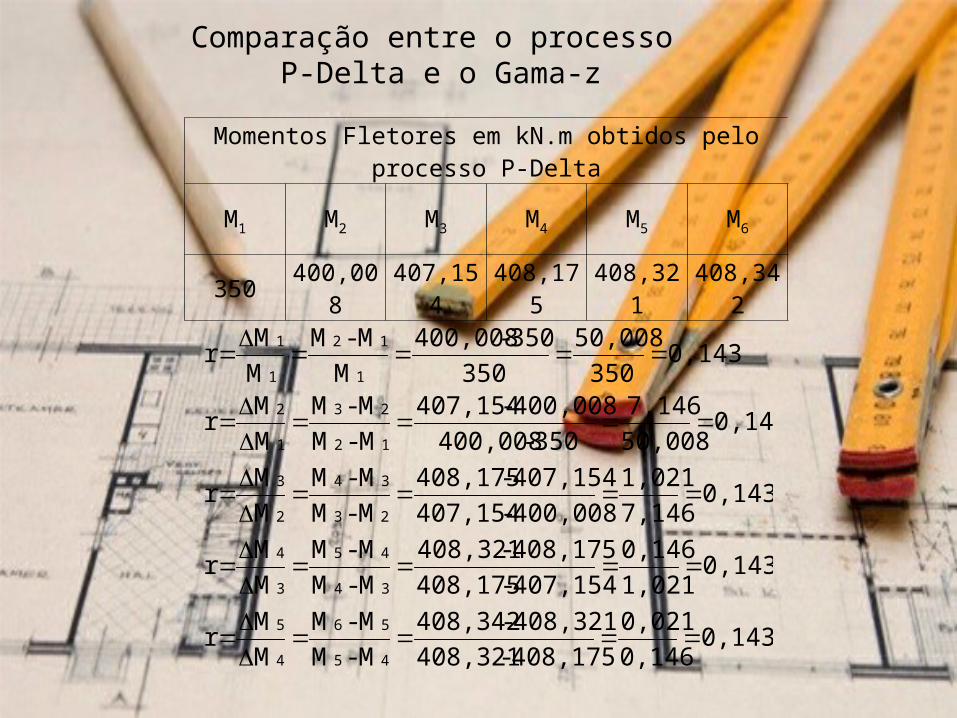
• A partir da tabela abaixo, verifica-se que os acréscimos de momento fletor constituem uma progressão geométrica de razão r = 0,143;
Comparação entre o processo P-Delta e o Gama-z
Comparação entre o processo P-Delta e o Gama-z
Momentos Fletores em kN.m obtidos pelo processo P-Delta
M1 M2 M3 M4 M5 M6
350 400,008 407,154 408,175 408,321 408,342
0,143 0,146
0,021
408,175-408,321
408,321-408,342
M - M
M - M
M
M r
0,143 1,021
0,146
407,154-408,175
408,175-408,321
M - M
M - M
M
M r
0,143 7,146
1,021
400,008-407,154
407,154-408,175
M - M
M - M
M
M r
0,143 50,008
7,146
350-400,008
400,008-407,154
M - M
M - M
M
M r
0,143 350
50,008
350
350-400,008
M
M - M
M
M r
45
56
4
5
34
45
3
4
23
34
2
3
12
23
1
2
1
12
1
1