Embed Size (px)
Citation preview

An object-oriented design of a finite element code: application
to multibody systems analysis
V. Kromera,*, F. Dufosseb, M. Gueurya
aERIN, ESSTIN, Universite Henri Poincare, Nancy 1, 54519 Vandoeuvre-les, Nancy, FrancebSA VALUTEC, Universite de Valenciennes, 59314 Valenciennes, France
Received 30 October 2002; revised 22 March 2004; accepted 30 March 2004
Abstract
This paper will describe one approach to the design and implementation of a multibody systems analysis code using an object-oriented
architecture. The principal objective is to show the adequacy between object-oriented programming and the finite element method used for
the treatment of three-dimensional multibody flexible mechanisms. It will show that object-oriented programming greatly simplifies the
choice and the implementation of other formalisms concerning polyarticulated systems, thus conferring high flexibility and adaptability to
the developed software.
q 2004 Elsevier Ltd. All rights reserved.
Keywords: Object-oriented programming; Multibody systems; Cþþ ; Finite element analysis
1. Introduction
The finite element method (FEM) has become the most
popular numerical method for solving a wide variety of
complex engineering problems. Over the years, FEM codes
have emphasized the use of the Fortran programming
language, with a so-called ‘procedural programming’. As a
result, the codes contain numerous complex data structures,
which can be called anywhere in the program. Because of this
global access, the flexibility of the software is decreased:
when a FEM program has many computational capabilities,
it becomes very difficult to maintain the code and even more
difficult to enlarge the program codes. The recoding of these
finite element programs in a new language is not a solution to
this inflexibility problem, thus a redesign is needed.
Object-oriented programming is currently seen as the
most promising way of designing a new application. It leads
to better structured codes and facilitates the development,
the maintenance and the expansion of such codes.
The object-oriented philosophy was proposed as a
general methodology for FEM implementation for the first
time in Ref. [1]. Over the past decade, it has been
successfully applied to various domains in finite element
developments: constitutive law modeling [2,3], parallel
finite element applications [4,5], rapid dynamics [6], multi-
domain analysis for metal cutting, mould filling and
composite material forming [7–9], coupled problems [10],
non-linear analysis [11], symbolic computation [12,13],
variational approach [14], finite element analysis program
architecture [15–20], neural networks [21], impact simu-
lation [22], among others.
However, little effort has been made to implement
object-oriented programming in multibody systems anal-
ysis: like many other engineering applications, multibody
systems analysis codes (ADAMS [23], DADS [24], MBOSS
[25]) are written in Fortran. Therefore, the main objective of
this work is to describe one approach to the design and
implementation of a multibody systems analysis code using
an object-oriented architecture.
The first part of the paper deals with the formalism used
for the treatment and the resolution of multibody systems. It
will be shown that the structure of multibody systems
presents similarities with object-oriented concepts and lends
itself very well to object-oriented programming techniques
[26,27]. The principal features of object-oriented program-
ming are summarized in the second part of this paper.
The architecture of the computational engine of the software
0965-9978/$ - see front matter q 2004 Elsevier Ltd. All rights reserved.
doi:10.1016/j.advengsoft.2004.03.008
Advances in Engineering Software 35 (2004) 273–287
www.elsevier.com/locate/advengsoft
* Corresponding author. Tel./fax: þ33-3-83-68-50-91.
E-mail addresses: [email protected] (V. Kromer), francois.
[email protected] (F. Dufosse), [email protected]
(M. Gueury).

is then presented, with the description of the most important
classes. Emphasis is placed on the adequacy between
object-oriented programming and the FEM within a given
formalism and given hypotheses. It will be shown that
object-oriented programming greatly simplifies the choice
and the implementation of other formalisms concerning
polyarticulated systems, conferring high flexibility and
adaptability to the developed software. The last section is
dedicated to numerical examples.
2. Governing equations and numerical resolution
for multibody systems
At each step of the formalism, choices have been made in
order to favor concepts such as modularity, polyvalence and
evolutivity, which fit particularly well to the object-oriented
philosophy.
2.1. Flexible beam dynamic formulation
In order to describe the dynamics of a flexible beam, an
inertial reference frame ðeÞ (orthogonal basis vectors ~ei;
i ¼ 1–3) is used for the description of the translational
motion, whereas a body-fixed frame ðbÞ (orthogonal basis
vectors ~bi; i ¼ 1–3) is used for the rotary motion [28,29].
The motion due to rigid motion is not distinguished from
that due to the deformations. Moreover, the translational
inertia is completely decoupled from the rotaty inertia. The
advantage to this is that the beam inertia is identical in form
to that of rigid body dynamics.
Thus, the same formalism can be used for mechanisms
containing rigid elements as well as deformable elements.
The location from the inertial origin of an arbitrary point
P on the beam (Fig. 1) is represented by the following
position vector:
~r ¼ ~Xe þ ~ue þ ~lb ð1Þ
where ~X is the position vector of a point of the original
neutral axis, ~u is the total translational displacement vector
of the neutral axis, ~l is a vector connecting the beam neutral
axis to the material point P located on the deformed beam
cross-section.
The notation _e or _b in Eq. (1) indicates that the quantity
is expressed with respect to the frame ðeÞ or ðbÞ:
The orientation of the body-fixed reference frame is
expressed with respect to the inertial reference frame
through an orthogonal transformation matrix, as:
ðbÞ ¼ ½R�ðeÞ ð2Þ
The body frame components of the angular velocity tensor
are obtained by:
~v½ � ¼ 2½ _R�½R�T ¼
0 2v3 v2
v3 0 2v1
2v2 v1 0
2664
3775 ð3Þ
where vi ði ¼ 1–3Þ are the components of the angular
velocity vector ~v; the notation ½_x� indicates the time
derivative, the notation ½~x� indicates a skew symetric tensor
and the notation ½x�T indicates a transpose matrix.
The final discrete equations of motion of a flexible beam
element are given as:
m 0
0 J
" #€~u
_~v
8<:
9=;þ
~0
~D
8<:
9=;þ
~Se
~Sb
8<:
9=; ¼
~Fe
~Fb
8<:
9=; ð4Þ
where ½m� and ½J� represent the mass and inertia matrices; €~u
and _~v represent the nodal accelerations vectors; ~D
represents the non-linear acceleration, ~Se;b
and ~Fe;b represent
the internal and external force vectors partitioned into
translational and rotational parts, respectively.
These equations can be specialized to the case of static
equilibrium as:
~S ¼ ~F ð5Þ
The equations of motion (4) can also represent a rigid body
by setting the internal force vector ~S to zero.
Therefore, the unconstrained equations of an arbitrary
configuration of flexible beams and rigid bodies can be
written in terms of one set of kinematical coordinates
denoting both the nodal coordinates of the flexible members
and the physical coordinates of the rigid bodies.
2.2. Equations of motion for multibody systems
We have chosen to use the Lagrange multiplier technique
to couple the algebraic constraint equations with the
differential equations of motion of the assembled mechan-
ism [30–32]. The incorporation of the constraints via the
Lagrange multiplier technique is straightforward, as the
inertially-based degrees of freedom of the beam com-
ponents, which embody both the rigid and deformation
motions, are kinematically of the same sense as the physical
coordinates of rigid body components.
Two types of constraint exist: holonomic or configur-
ation constraints and non-holonomic or motion constraints.
Holonomic constraints are formulated as implicit func-
tions of the displacement coordinates and eventually time.Fig. 1. Spatial beam kinematics.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287274

They express a restriction on the number of degrees of
freedom and therefore, on the set of possible configurations
of the system. A set of algebraic equations representing
holonomic constraint conditions between the displacement
coordinates is written as:
~QHð~d; tÞ ¼ ~0 ð6aÞ
›QH
›~d
" #{d~d} ¼ ½BH�{d~d} ¼ {~0} ð6bÞ
where
d~d ¼d~u
d ~a
( )
is the virtual generalized displacement vector, d ~a the virtual
rotation vector of the body-fixed basis.
Nonholonomic constraints conditions can only be
expressed as a relation between the differentials of the
coordinates and not as a finite relation between the
coordinates themselves. Constraints of this kind are such
that they cannot be integrated to be transformed to the
holonomic type. They bring a restriction on the behaviour of
the system, but not on the set of possible configurations. A
set of non-integrable equations concerning non-holonomic
constraints is written as:
~QNHð~d; ~_d; tÞ ¼ ~0 ð7aÞ
›QNH
›~_d
" #{d~_d} ¼ ½BNH�{d~_d} ¼ {~0} ð7bÞ
Another distinction is made between constraints involving
equalities, which are called bilateral constraints, and
constraints involving inequalities, named unilateral con-
straints. Holonomic constraints are only of the bilateral type.
Unilateral constraints are usually considered of the non-
holonomic type.
Given the constraints (6) and (7), the virtual work for the
unconstrained system is modified by the inclusion of the
virtual work which enforces the constraints through the
Lagrange multiplier technique. The equations of motion for
constrained flexible multibody systems are written as
follows:
m 0
0 J
" #{~€d} þ ½B�T ~l ¼
~Qu
~Qv
8<:
9=; ð8Þ
where
~€d ¼~€u
~_v
8<:
9=;
and ~l designates the vector of the Lagrange multipliers.
In order to alleviate the equations, the same notation has
been used (in Eq. (8) or in Eq. (4)) to represent elementary
or assembled matrices and vectors. The right-hand side
vector of Eq. (8) contains the remaining force-type terms as:
~Qu
~Qv
8<:
9=; ¼
~Fe
~Fb
8<:
9=;2
~Se
~Sb
8<:
9=;2
~0
~D
8<:
9=; ð9Þ
In Eq. (8), the notation contains both the holonomic and
non-holonomic constraints in the constraint force vector
½B�T ~l as:
½B� ¼BH
BNH
" #~l ¼
lH
lNH
( )ð10Þ
The ½B� matrix, called the matrix of constraints gradients
(or the constraint Jacobian matrix), is deduced from the
kinematic relationship between the bodies of the system.
These relationships can be imposed on the nodal degrees of
freedom of two separated flexible beams, or between a beam
nodal degree of freedom and a rigid body. Classical
Jacobian matrices modeling standard joints (universal,
revolute, spherical, translational joints) are described in
Ref. [33]. Specific joints (rigid or flexible wheel element)
describing contact conditions (with bi- or unilateral contact,
with or without friction and slipping) are described in
Ref. [34].
Thus, given the Jacobian matrices for the joints and beam
connections, the Eq. (8) can be employed in a systematic
manner to represent an arbitrary assemblage of articulated
flexible and rigid components.
2.3. Resolution of multibody systems equations
The resolution of multibody systems equations requires
the use of an adapted algorithm for the time integration of
the generalized coordinates. It must also include a proper
treatment of 3D finite rotations [35,36], as well as a
method to satisfy the kinematic constraints conditions. In
order to introduce an attractive modularity in the solution
procedures, which favors the object-oriented philosophy,
we have chosen to implement the staggered explicit-
implicit procedure proposed by Park [37]. The key to this
procedure is a staggered implementation of a separate
generalized coordinates integrator and constraints force
solver modules [37,38]. An explicit algorithm, described
in Section 2.3.1, is used to integrate the translational
displacements and the angular velocities of the system.
Once the angular velocities are obtained, the configuration
orientation is updated according to an implicit method
presented in Section 2.3.2. Finally, the Lagrange multi-
pliers are calculated in a separate routine, described in
Section 2.3.3, which implicitly integrates a stabilized
companion differential equation for the constraint forces
in time.
2.3.1. Integration of the generalized coordinates
Unconditional stability in time integration schemes can
be obtained with implicit algorithms, such as Newmark,
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287 275

but increases the complexity of the computation scheme.
For this reason, the generalized coordinates are calculated
with a particular explicit integration procedure, called ‘two-
stage staggered algorithm’ [38]. The stability analysis of
this algorithm can be found in Ref. [39]. The algorithm is
based on an interlaced application of the central difference
algorithm such that the generalized coordinates are
advanced one-half time step at a time, as follows:
_~unþð1=2Þ ¼ _~un2ð1=2Þ þ h€~un ð11aÞ
~unþð1=2Þ ¼ ~un2ð1=2Þ þ h_~un ð11bÞ
~vnþð1=2Þ ¼ ~vn2ð1=2Þ þ h _~vn ð11cÞ
2.3.2. Updating of the rotational orientation
The rotational orientation parameters are not directly
integrable from the angular velocity vector. As a
consequence, a procedure must be developed to update
the configuration orientation given the angular velocity.
Various methods have been proposed for the parametriza-
tion of large rotations (Euler angles, Bryant angles,
rotational vector, Rodrigues parameters, Euler parameters).
An overview of these methods can be found in Refs. [34,
40]. The Euler parameters representation has been chosen
in this work, because of its algebraic nature and especially
because it does not possess any singularity limitation. As
such, Euler parameters appear to be the only set that allows
the treatment of rotations of arbitrary magnitude without
resorting to any special precautions [41]. Any finite
rotation can be uniquely represented with a rotation angle
u and a rotation axis ~n (Euler–Chasles theorem). The four
Euler parameters are defined as:
q0 ¼ cosu
2~q ¼ sin
u
2~n ð12Þ
and are subject to the constraint equation:
q20 þ ~qT
~q ¼ 1 ð13Þ
The rotation matrix is a function of the Euler parameters
as:
½R� ¼ ½I� þ 2q0½~q�T þ 2½~q�½~q� ð14Þ
Given (3) and (14), the angular velocity vector is expressed
in terms of the Euler parameters and their time
derivatives as:
0
~v
( )¼ 2
q0 ~qT
2~q q0½I�2 ½~q�
" #_q0
_~q
( )ð15Þ
By inverting (15), the Euler parameters derivatives are
obtained in terms of the body frame angular velocity
components:
_q0
_~q
( )¼
1
2
0 2 ~vT
~v ½ ~v�T
" #q0
~q
( )¼ ½Að ~vÞ�{q} ð16Þ
The configuration orientation is deduced from a time
discretization of (16). The Euler parameters derivatives are
subject to the following constraint conditions:
_q0q0 þ_~qT~q ¼ 0 ð17Þ
Among several possible schemes, the implicit trapezoidal
formula gives an approximation which satisfies (17) in the
discrete sense:
1
hð~qnþ1 2 ~qnÞ ¼ ½Að ~vnþð1=2ÞÞ�
1
2ð~qnþ1 þ ~qnÞ ð18Þ
where h is the time step.
The discrete orientation update is then given by:
~qnþ1 ¼1
D½I� þ
h
2½Að ~vnþ1=2Þ�
� �½I� þ
h
2½Að ~vnþ1=2Þ�
� �~qn
ð19Þ
where D ¼ 1 þ ðh2=4Þk ~vk2 and the notation k~xk designates
the Euclidian norm.
2.3.3. Lagrange multipliers treatment
The Lagrange multipliers are solved by the use of a
stabilized constraint force procedure. To effect a partitioned
solution of the constraints, we use the well-known penalty
technique, so that the constraint forces are made pro-
portional to violations of the constraint conditions:
~lH ¼1
1~QHð~d; tÞ ~lNH ¼
1
1~QNHð~d; tÞ ð20Þ
where 1 is a constant penalty coefficient ð0 , 1p 1Þ:
To solve ~l separately, the algebraic forms (20) must be
transformed into differential forms. First, equations (20) are
differentiated once as follows:
~_lH ¼1
1½BH�~_d ~_lNH ¼
1
1½BNH�~€d ð21Þ
Let us rewrite the equations of motion (8) as:
~€d ¼ ½M�21ð{Q} 2 ½B�T ~lÞ ð22Þ
where ½M� represents the mass and inertia matrix of (8).
For non-holonomic constraints, upon substituting (21)
into (22), one obtains the following stabilized differential
equation:
1~_lNH þ ½BNH�½M�21½BNH�T ~lNH ¼ ½BNH�½M�21{Q} ð23Þ
For holonomic constraints, the equations of motion (22) are
first integrated using the implicit forward Euler formula as:
_~dnþ1 ¼ h€~dnþ1 þ
_~dn ð24Þ
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287276

By substituting the result of the integration of (22) into
(21), we obtain the stabilized differential equation for
the Lagrange multipliers as:
1_~lHnþ1
þ h½BH�½M�21½BH�T ~lHnþ1
¼ h½BH�½M�21 ~Qnþ1 þ ½BH�_~dn ð25Þ
As one can see, the stabilized differential equation for
holonomic (25) or non-holonomic (23) constraints can be
written in the same form:
1_~lþ c1½B�½M�21½B�T ~l ¼ c1½B�½M�21 ~Qnþ1 þ c2½B�
_~dn ð26Þ
with c1 equal to h or 1 and c2 equal to 1 or 0, for holonomic
and non-holonomic constraints, respectively.
Finally, Eq. (26) is integrated by the forward Euler
formula; the discrete update of the Lagrange multipliers is
obtained as follows:
ð1½I� þ c1h½B�½M�21½B�T Þ ~lnþ1
¼ 1 ~ln þ c1h½B�½M�21 ~Qnþ1 þ c2h½B�_~dn ð27Þ
The accuracy and robustness of this staggered, stabilized
procedure for the solution of the constraints have been
established in Ref. [37].
As one can see, the updating of the generalized
coordinates, of the rotational orientation and of the
Lagrange multipliers are performed separately. For each
time step, the generalized coordinates are first calculated
and are used to update the right-hand side vector ~Q: This
vector is put into the Lagrange multiplier update module.
Finally, the right-hand side vector ~Q is corrected with the
current constraint force vector ½B�T ~l: The procedure is then
advanced to the next time step.
These separated treatments lead to an attractive modular
software implementation, which favors the object-oriented
philosophy and eases the introduction of new algorithms
and new formalisms in the future. Section 3 is dedicated to
the description of the object-oriented architecture of the
multibody analysis software.
3. Object-oriented design of the computational engine
3.1. Object-oriented concepts
Procedural languages like C, Pascal and Fortran
consider data as passive and memory occupying
elements, which can be manipulated only by functions
and procedures. In contrast, the object-oriented philos-
ophy comes from the idea that tools (methods) must be
associated with the information (data or attributes) they
manage. The key concepts of object-oriented program-
ming (abstraction, encapsulation, inheritance, polymorph-
ism) can be found in many computer journals and
language user guides [42–45]. Thus we will only present
briefly those concepts and try to show their similarities to
the structure of multibody systems.
The abstraction of the data type is realized by the
means of a class. A class incorporates the definition of
the structure as well as the operations on the abstract
data type. An object is an instance of the class, which
means that it is the material realisation of the abstract
data type defined by the class. For instance, at its highest
level of abstraction, the architecture of a multibody
system can be thought of as consisting of four basic
objects: bodies, constraints between bodies, loads and
motions.
The encapsulation designates the independent self-
containment of classes and their methods and attributes.
Encapsulation is an ideal concept for multibody systems, as
its implementation concentrates the attributes and methods
associated with an object such that access is permitted only
through well-defined interfaces. This full modularity greatly
enhances introducing modifications in the development
phase of the software, as well as performing on-going
maintenance.
The inheritance concept is used to define object
hierarchies. An object can have many children (instances
of a subclass) which inherit its data and member functions.
A subclass is usually of a special type and has additional
methods and attributes members relating to it. For example,
for multibody systems, the behavior and properties of
specific types of bodies (rigid, flexible, …), joints (revolute,
universal, spherical, prismatic, …), loads (punctual loads,
distributed loads, …) are specified and implemented in
classes derived from the base classes.
The last concept is polymorphism, which designates the
capability of object-oriented applications to interpret the
same request differently depending on the object being
processed. It is realised through the definition of abstract
objects using virtual member functions. Abstract objects
allow the writing of generic algorithms and the easy
extension of the existing code. For example, if Joint were
an abstract class, it could contain the definition of a virtual
method get_jacobian_matrix( ), which is in fact a dummy
method that does not actually do anything. All this definition
is simply to declare that Jacobian matrices can be obtained
from joints. The actual calculation of the jacobian matrices
is done within the descendants of class Joint. As a child of
Joint, Revolute_Joint is also able to give a jacobian matrix,
and the method get_jacobian_matrix( ) would contain the
code needed to actually perform its calculation. Similarly,
Spherical_Joint and Prismatic_Joint could be defined with
their methods for calculating Jacobian matrices. Thus,
through polymorphism, it is possible to describe any
constraint between two bodies without regard to joint type
and body type (rigid, flexible, etc). The implementation
details of the specific bodies and joints involved in
the connection are hidden by abstraction in the joint and
body objects.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287 277

3.2. Global description of the computational engine
Actual object-oriented programming still faces the
problem of choosing a language: it is obvious that the
code organization and even the algorithms used depend
heavily on this choice. Although Cþþ compilers obviously
do not optimize the code as much as Fortran compilers, we
selected Cþþ , which seems to be, currently, the language
providing numerical efficiency, portability, flexibility and is
easy to use [10].
As the complexity of the software increases, it becomes
necessary to employ good analysis tools. We decided to use
unified modeling language (UML) [46], which appears to be
the technique most commonly used. UML is a standardized
modeling language, with a set of symbols and rules
describing the relationships between the symbols.
In this paper, we will focus on the computational engine
of the software, for the treatment of three-dimensional
multibody flexible mechanisms with large rotations and
large strains [47,48]. It is written in Cþþ ANSI,
independently of the preprocessor, the postprocessor and
the compiler. The current architecture is based on the
hypotheses and formalism presented in the previous section.
However, it has been conceived to provide a flexible and
extensive set of objects that facilitate multibody systems
analysis and which can be adapted to meet future
developments.
The global architecture is organized around several basic
classes associated with the classical steps of a multibody
finite element analysis (geometry definition, meshing,
interactions definition, finite element formulation, beha-
viour law, joints definition, solving algorithms, writing
results). The description of these classes is presented in
Section 3.3.
The management of the different stages of the analysis is
performed by the major class Domain, which represents the
heart of the software architecture (Fig. 2). It has been
created to represent an elementary problem (corresponding
to a specific multibody system analysis). The complete
description of the class Domain is given in Section 3.4.
3.3. Description of the basic classes
3.3.1. Common tools
Some utility classes have been developed to manage
mathematical tools, variable size of objects, stacks, buffers,
pools for memory management, read and write protection
on objects and execution time measurement, among others
(for example, classes Vect, TabVect, Matrix, SMatrix,
DMatrix, List). The implementation of these classes is
based on the templates mechanism, which allows the
definition of the concepts (methods, algorithms) indepen-
dently of the type of object being used.
3.3.2. Parametrization of the rotations
The abstract Rotation class is of particularly importance:
it manages the information for the different parametrizations
of the finite rotations (rotational vector, Euler parameters,
Rodrigues parameters, among others). As explained in
Section 2.3.2, an adequate representation of the finite
rotations is required for the modelization of 3D multibody
systems, as it is used in several steps of the calculation
(calculation of the internal forces, calculation of the
constraint Jacobian matrices). The Rotation class contains
several virtual methods, for example the method GiveMatr-
RotFrom( ), which calculates the rotation matrix from the
parametrization system, or the method GiveVectParamRot-
From( ), which gives the rotation parameters from the
rotation matrix (Fig. 3).
The classes corresponding to a specific parametrization
of the rotations are derived from the Rotation base class
(Fig. 4). The virtual methods of Rotation are implemented in
the derived classes, as well as specific methods. For
instance, in the Euler_Parameters class, the virtual method
GiveMatrRotFrom( )calculates the rotation matrix accord-
ing to Eq. (15).
Fig. 4. Derived classes from the Rotation class.
Fig. 3. Rotation class definition.
Fig. 2. Global architecture of the software.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287278

3.3.3. Finite element formulation
Element and Node are traditional classes used for the
representation of finite elements. The class Element_For-
mulation (Fig. 5) is the abstract master class of the finite
elements library. It provides virtual methods of computation
of the different finite element arrays and tables (Fig. 6) (as,
for example, the classical mass and rigidity matrices, the
strain increments vector, the non-linear acceleration vector,
the internal forces vector). The effective computation
depends on the chosen formalism and may vary appreciably.
In these conditions, the object-oriented philosophy eases the
implementation of new formalisms, without requiring a
complete redefinition of the software’s architecture.
The abstract class Element_Type contains virtual
methods for the calculation of the element’s shape function
and its derivatives. It possesses an attribute which is a
pointer to an Element object. From Element_Type, sub-
classes corresponding to a specific finite element are derived
(for example, Beam2 for a two-nodes beam element).
The class Beam2_Formulation is derived from Ele-
ment_Formulation. One of its attributes is a pointer to the
desired finite element, Beam2, for example. This class
corresponds to a specific finite element formulation, and
allows the redefinition of the methods according to the type
of the element. For instance, the formalism implemented in
the current code requires the calculation of curvatures and
curvature increments of the beams. As a consequence,
besides the methods already defined in its mother class
Element_Formulation, the class Beam2_Formulation also
contains specific methods such as Calculate_Curvatures( ),
Calculate_Curvature_Increments( ) (Fig. 7).
3.3.4. Behaviour law
In most object-oriented calculation software, the material
behaviour is included in the finite element formulation. In
our code architecture, a separated class Material_Behaviour
has been created, which contains the virtual methods for the
calculation of the stresses according to a given material
behaviour law (Fig. 5). The current formalism introduces a
rate-type constitutive law that relates the instantaneous rate
of stress to the instantaneous rate of deformation. The
methods for a linear elastic material are defined in the
derived class Linear_Elastic_Behaviour (for example, the
methods Calc_tgt_oper(), Calc_str_inc(), Calc_res_
str_inc() calculate the tangent operator, the stress incre-
ments and the resultant stress increments, respectively).
Fig. 6. Element_Formulation class definition.
Fig. 5. Classes associated with the finite element modelization and with material behaviour.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287 279

3.3.5. Joints formulation procedure
As the Element class, the Joint class has been created for
the modelization of the joints between bodies (Fig. 8).
The abstract class Joint_Formulation allows the treat-
ment of the joints according to different formalisms (Fig. 9).
Currently, the only available class is the derived class
Jacobian, for the calculation of the constraint Jacobian
matrices required in the Lagrange multipliers technique
described in Section 3.2. The constraint Jacobian matrices
calculated by methods of the class Jacobian are stored as
attributes of the class Joint (Fig. 8).
This organization is not the only, or perhaps not even
the best, organization for classes associated with the
constraints modelization. For example, one could argue
that the calculation of the Jacobian matrices could be
performed directly inside the Joint class, and that there is
no specific need for the abstract class Joint_Formulation.
Nevertheless, in our sense, the current organization favors
the modularization and the understanding of the software.
Also, although not currently implemented, other pro-
cedures of treatment for the constraint equations (Master/
Slave methods, among others) can be introduced in
a straighforward way, by a simple derivation of Joint_
Formulation.
3.3.6. External interactions
The word ‘interaction’ designates a relationship of the
studied domain with the outside, i.e. a boundary conditions or
an applied load. We define an interaction at the element level,
by specifying the node where the interaction is applied (in the
case of a boundary condition or a punctual action), the
direction of the interaction and its time evolution.
The class Time_Function has been created to manipulate
any function depending on the time. At a given time, the
value of the function is given by the method Calculate_
Function(). In order to represent any interaction, the class
Interaction has been implemented (Fig. 10). At a given time,
the method Calculate_Force() calculates the components of
the vectors of forces and moments applied to the element.
Fig. 9. Classes associated with constraints modelization.
Fig. 7. Beam2_Formulation class definition.
Fig. 8. Joint class definition.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287280
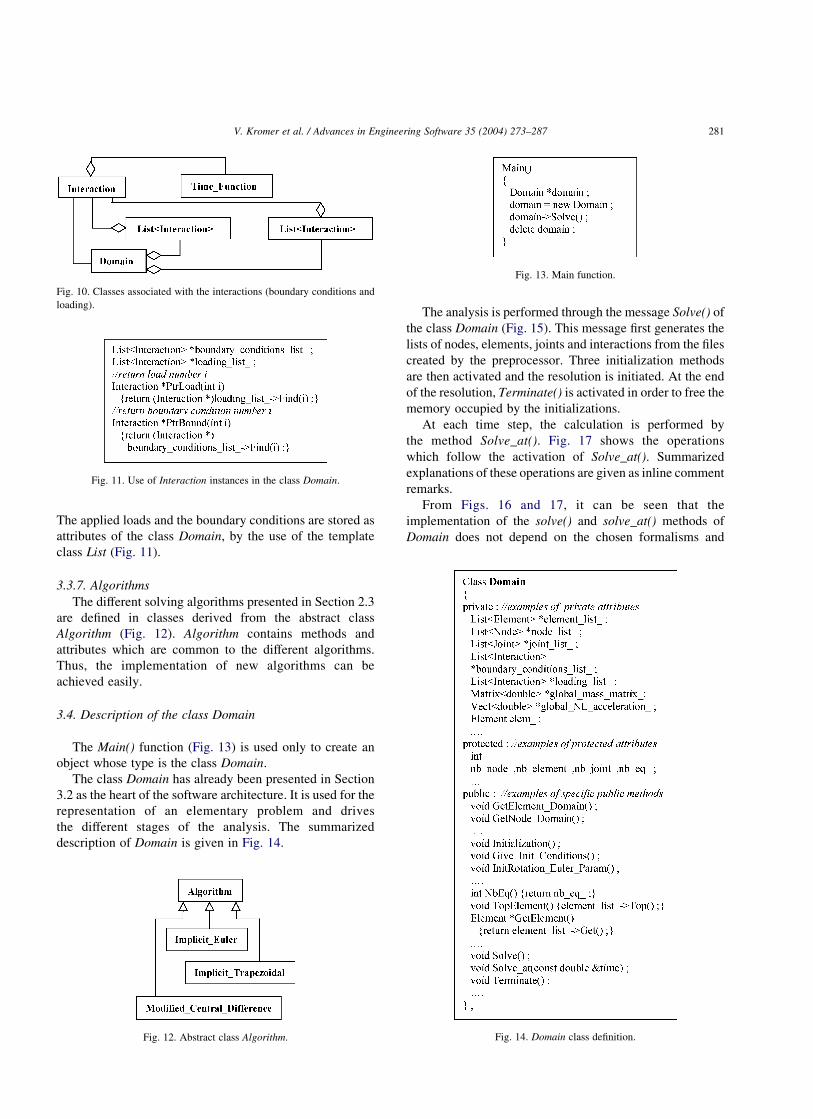
The applied loads and the boundary conditions are stored as
attributes of the class Domain, by the use of the template
class List (Fig. 11).
3.3.7. Algorithms
The different solving algorithms presented in Section 2.3
are defined in classes derived from the abstract class
Algorithm (Fig. 12). Algorithm contains methods and
attributes which are common to the different algorithms.
Thus, the implementation of new algorithms can be
achieved easily.
3.4. Description of the class Domain
The Main() function (Fig. 13) is used only to create an
object whose type is the class Domain.
The class Domain has already been presented in Section
3.2 as the heart of the software architecture. It is used for the
representation of an elementary problem and drives
the different stages of the analysis. The summarized
description of Domain is given in Fig. 14.
The analysis is performed through the message Solve() of
the class Domain (Fig. 15). This message first generates the
lists of nodes, elements, joints and interactions from the files
created by the preprocessor. Three initialization methods
are then activated and the resolution is initiated. At the end
of the resolution, Terminate() is activated in order to free the
memory occupied by the initializations.
At each time step, the calculation is performed by
the method Solve_at(). Fig. 17 shows the operations
which follow the activation of Solve_at(). Summarized
explanations of these operations are given as inline comment
remarks.
From Figs. 16 and 17, it can be seen that the
implementation of the solve() and solve_at() methods of
Domain does not depend on the chosen formalisms and
Fig. 10. Classes associated with the interactions (boundary conditions and
loading).
Fig. 11. Use of Interaction instances in the class Domain.
Fig. 13. Main function.
Fig. 12. Abstract class Algorithm. Fig. 14. Domain class definition.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287 281

solving algorithms. The introduction of new formalisms or
new solving strategies can be achieved easily, with small
changes of some existing classes or the definition of new
classes. In any case, it does not require the complete
redefinition of the software architecture.
4. Numerical validation
In this section, four numerical examples are given in order
to demonstrate the software capabilities. Although they are
purely academic, these examples illustrate the potential of
the software, whose computational engine has been designed
in order to integrate flexible and rigid bodies into the
architecture in a unified manner. Moreover, it is able to deal
with both open-loop and closed-loop in a systematic way.
4.1. Example 1: Robot arm
This example deals with a robot arm (Fig. 17), whose two
similar segments are connected by a spherical joint. The first
segment is subjected to the prescribed angular rotation
shown in Fig. 17, together with the physical description of
the robot.
The left extremity is subjected to a prescribed displace-
ment along the Z axis. The beam is discretized in 16 linear
beam elements. The time step is equal to 0.0002. The
sequence of the motion is given in Fig. 18 (spatial motion)
and Fig. 19 (motion in the X –Y plane).
Figs. 20–22 represent the horizontal displacement, the
vertical displacement and the out-of-plane displacement of
the robot extremity, respectively. They are in perfect
agreement with the results obtained by Ibrahimbegovic [32].
4.2. Example 2: winding of an embedded beam
The second example concerns the pure bending of a
beam whose first extremity is embedded and whose second
extremity is submitted to an external torque. The physical
description of the system is given in Fig. 23. The beam is
discretized in twelve linear beam elements.
The torque is applied incrementally, the k coefficient
ð0 # k # 2Þ being assimilated to the time. The time step
Fig. 16. Solve_at() method of the class Domain.
Fig. 15. Solve() method of the class Domain.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287282

Fig. 19. Motion of the robot arm in the X –Y plane.
Fig. 20. Horizontal displacement of the robot extremity.
Fig. 21. Vertical displacement of the robot extremity.
Fig. 22. Out-of-plane displacement of the robot extremity.
Fig. 23. Pure bending of an embedded beam: problem data.
Fig. 24. Successive deflections of the embedded beam.
Fig. 17. Robot arm: problem data.
Fig. 18. Spatial motion of the robot arm.
Fig. 25. Evolution of the angle u versus u=L:
Fig. 26. Evolution of the angle u versus v=L:
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287 283

is equal to Dk ¼ 0; 0002: The successive deflections are
shown in Fig. 24.
According to the Euler classical formula [49], the
deflection of the beam is a circle portion, the analytical
expressions of the horizontal and vertical displacements of
the extremity supporting the torque are given by:
u ¼ L 2L
u=2sin
u
2
� �cos
u
2
� �v ¼
L
u=2sin2 u
2
� �
w ¼ 0
ð28Þ
with
u ¼ML
EIð29Þ
With Figs. 25 and 26, it is possible to compare the evolution
of the angle u versus u=L and v=L; respectively, for both the
numerical and the analytical solutions.
For u ¼ 2p; the deformed configuration of the beam is a
closed circle. With Table 1, it is also possible to compare
our results with the analytical solution and with the results
obtained by Surana et al. [49], respectively. It can be seen
that the results are in good agreement.
4.3. Example 3: three-bar mechanism
The third example is a three-bar mechanism (Fig. 27).
The bars 1 and 3 are rigid. They are connected through
revolution joints to the flexible bar 2. Densities and
inertia are the same for the three bars. The first bar is
submitted to a constant angular velocity v:
The rigid bars are discretized in two linear beam
elements, while the flexible bar is discretized in four
linear beam elements.
The time step is equal to 0.0002. The successive
deflections are shown in Fig. 28.
The vertical and horizontal displacements of joint 1 are
represented in Figs. 29 and 30. They are in perfect
agreement with the results obtained by Ibrahimbegovic [32].
Table 1
Comparison of the evolution of the horizontal and vertical displacements ðu; vÞ of the extremity
k ðu; vÞ Analytical solution ðu; vÞ Surana et al. [49] Relative error (%) ðu; vÞ Current solution Relative error (%)
0.2 (20.774; 3.648) (20.765; 3.623) (1.16; 0.68) (20.605; 3.220) (21.84; 11.73)
0.4 (22.918; 6.598) (22.899; 6.574) (0.65; 0.36) (22.803; 6.521) (3.94; 1.16)
0.6 (25.945; 8.333) (25.955; 8.328) (0.17; 0.06) (26.234; 8.522) (4.86; 2.27)
0.8 (29.194; 8.637) (29.293; 8.620) (1.07; 0.20) (28.889; 8.712) (3.31; 0.86)
1.0 (212.000; 7.639) (212.215; 7.507) (1.80; 1.70) (212.005; 7.768) (0.04; 1.69)
1.2 (213.870; 5.758) (214.120; 5.376) (1.80; 6.63) (213.809; 6.043) (0.43; 4.95)
1.4 (214.590; 3.571) (214.660; 2.877) (0.48; 19.43) (214.859; 3.428) (1.84; 4.00)
1.6 (214.270; 1.650) (213.850; 0.797) (2.94; 51.7) (214.478; 1.427) (1.46; 13.51)
1.8 (213.250; 0.405) (212.180; 20.123) (8.07; 130.0) (213.300; 0.390) (0.38; 3.77)
Fig. 27. Three-bar mechanism: problem data.
Fig. 28. Successive deformed configurations of the three-bar mechanism.
Fig. 29. Evolution of the horizontal displacement of joint 1.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287284

4.4. Example 4: helical motion of a pinned beam
The pinned beam presented in Fig. 31 is subjected to
slide along the Z axis, under a constant torque and a constant
concentrated force applied to the pinned extremity. The
physical description of the beam is given in Fig. 31. The
beam is discretized in ten linear beam elements. The timestep is equal to 0.0002. The sequence of the motion is given
in Fig. 32.
Figs. 33–35 represent the horizontal displacement, the
vertical displacement and the out-of-plane displacement of
the free extremity, respectively. They are in perfect
agreement with the results obtained by Ibrahimbegovic [36].
5. Conclusions
A finite element calculation software may advance in
different directions. In particular, for software dealing with
multibody systems, many formalisms and hypotheses can
evolve and combine with each other, as for example,
the choice of the finite elements, the choice of the referential
frame, the definition of physical or material parameters, the
choice of the parameters for the representation of the finite
rotations, the choice of the solving algorithm, the formalism
and the treatment of the joints, the flexibility or the rigidity
of the bodies, among others.
Fig. 31. Helical motion of a pinned beam: problem data.
Fig. 32. Spatial motion of the pinned beam.
Fig. 33. Horizontal displacement of the free extremity.
Fig. 34. Vertical displacement of the free extremity.
Fig. 35. Out-of-plane displacement of the free extremity.
Fig. 30. Evolution of the vertical displacement of joint 1.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287 285

In this paper, the architecture of a new finite element
software for the simulation of flexible mechanisms has been
presented. The program has been designed according to
object-oriented principles. This approach allows us to
simplify the architecture of the program and to take
advantage of the inherent synergy between object-oriented
design and multibody systems analysis. Additional benefits,
such as improved maintainability, flexibility and ease of
expansion, also accrue as a result. The flexibility of the
software is made possible by the clear modularization that
can be reached with object-oriented programming, with a
marked separation of functionalities. Extensibility and
reusability of object-oriented programming are clearly
shown: the introduction of new formalisms or new solving
strategies can be achieved easily, with small changes of
some existing classes or the definition of new classes. In any
case, it does not require the complete redefinition of the
software architecture.
References
[1] Miller GR. A LISP-based object-oriented approach to structural
analysis. Engng Comput 1988;4:197–203.
[2] Foerch R. Un environnement oriente objet pour la modelisation
numerique des materiaux en calcul des structures. Thesis. Ecole
Nationale Superieure des Mines de Paris; 1996.
[3] Besson J, Leriche R, Foerch R, Cailletaud G. Object-oriented
programming applied to the finite element method. Part II.
Application to material behaviors. Revue Europeenne des elements
Finis 1998;7(5):567–88.
[4] Hsieh SH, Sotelino ED. A message-passing class library Cþþ for
portable parallel programming. Engng Comput 1997;13:20–34.
[5] Breitkopf P, Escaig Y. Object-oriented approach and distributed finite
element simulations. Revue Europeenne des Elements Finis 1998;
7(5): 609–26.
[6] Potapov S, Jacquart G. Un algorithme ALE de dynamique rapide base
sur une approche mixte elements finis-volumes finis. Proceedings of
3eme Colloque National en calcul des structures de Giens; 1997. p.
509–14.
[7] Gelin JC, Walterthum L. Conception d’un logiciel oriente-objets pour
la simulation de processus de formage. Proceedings of 2eme Colloque
National en calcul des structures de Giens; 1995. p. 552–8.
[8] Walterthum L. Programmation orientee objet et calcul par elements
finis. Application a la conception d’un logiciel de simulation en mise
en forme des materiaux. Thesis. Universite de Franche-Comte; 1996.
[9] Gelin JC, Paquier P, Walterthum L. Application de la POO pour la
conception d’un logiciel de simulation par elements finis en mise en
forme des materiaux. Revue Europeenne des Elements Finis 1998;
7(5):505–33.
[10] Klapka I, Cardona A, Geradin M. An object oriented implementation
of the finite element method for coupled problems. Revue Europeenne
des Elements Finis 1998;7(5):469–504.
[11] Dubois-Pelerin Y, Pegon P. Object-oriented programming in non-
linear finite element analysis. Comput Struct 1998;67:225–41.
[12] Eyheramendy D, Zimmermann T. Programmation orientee objet
appliquee a la methode des elements finis: derivations symboliques,
programmation automatique. Revue Europeenne des Elements Finis
1995;4:327–60.
[13] Eyheramendy D. An object-oriented hybrid symbolic/numerical
approach for the development of finite element codes. Finite Elem
Anal Des 2000;36:315–34.
[14] Eyheramendy D, Zimmermann T. Integration d’une approche
variationnelle pour la methode des elements finis dans un environne-
ment oriente objet. Revue Europeenne des Elements Finis 1998;7(5):
589–607.
[15] Mackie RI. Object-oriented programming and numerical methods.
Microcomput Civil Engng 1991;6:123–8.
[16] Scholz SP. Elements of an object-oriented FEMþþ program in
Cþþ . Comput Struct 1992;43(3):517–29.
[17] Remy P, Devloo B, Alves Filho JSR. An object-oriented approach to
finite element programming (phase I): a system independent window-
ing environment for developing interactive scientific programs. Adv
Engng Software 1992;14:41–6.
[18] Besson J, Foerch R. Object-oriented programming applied to the finite
element method. Part I. General concepts. Revue Europeenne des
Elements Finis 1998;7(5):535–66.
[19] Debordes O. Calcul des structures et architectures de logiciels.
Proceedings of 4eme Congres en Calcul des Structures de Giens;
1999. p. 61–78.
[20] Breitkopf P. Demarche objet et modelisation numerique. Proceedings
of 4eme Congres en Calcul des Structures de Giens; 1999. p. 79–84.
[21] Szewczyk ZP, Sleight DW. Object-oriented approach to interactive
analysis of structures. Adv Engng Software 2000;31:733–42.
[22] Pantale O. An object-oriented programming of an explicit dynamics
code: application to impact simulation. Adv Engng Software 2002;33:
297–306.
[23] Ryan RR. ADAMS: multibody system analysis software. In: Scheihlen
W, editor. Multibody systems handbook. Berlin: Springer; 1990.
[24] Nikravesh PE, Chung IS. Application of Euler parameters for the
dynamic analysis of three-dimensional constrained mechanical
systems. J Mech Des 1982;104:785–91.
[25] Nikravesh PE, Gim G. Systematic construction of the equations
of motion for multibody systems containing closed kinematic
loops. Proceedings of the ASME Design Automation Conference;
1989.
[26] Kunz DL. An object-oriented approach to multibody systems analysis.
Comput Struct 1998;69:209–17.
[27] Tisell C, Orsborn K. A system for multibody analysis based on object-
relational database technology. Adv Engng Software 2000;31:
971–84.
[28] Park KC, Downer JD, Chiou JC, Farhat C. A modular multibody
analysis capability for high precision, active control and real-time
applications. Int J Numer Meth Engng 1991;32:1767–98.
[29] Downer JD, Park KC, Chiou JC. Dynamics of flexible beams for
multibody systems: a computational procedure. Comput Meth Appl
Mech Engng 1992;96:373–408.
[30] Usoro PB, Nadira R, Mahil SS. A finite element/Lagrange approach to
modeling lightweight flexible manipulators. Trans ASME 1986;108:
198–205.
[31] Cardona A, Geradin M, Doan DB. Rigid and flexible joint modelling
in multibody dynamics using finite elements. Comput Meth Appl
Mech Engng 1991;89:395–418.
[32] Ibrahimbegovic A, Mamouri S. On rigid components and joint
constraints in nonlinear dynamics of flexible multibody systems
employing 3D geometrically exact beam model. Comput Meth Appl
Mech Engng 2000;188:805–31.
[33] Chiou JC. Constraint treatment techniques and parallel algorithms for
multibody dynamic analysis. PhD Thesis. University of Colorado; 1990.
[34] Cardona A. An integrated approach to mechanism analysis. PhD
Thesis. University of Liege; 1989.
[35] Ibrahimbegovic A. On the choice of finite rotation parameters.
Comput Meth Appl Mech Engng 1997;149:49–71.
[36] Ibrahimbegovic A, Mikdad M. Finite rotations in dynamics of beams
and implicit time-stepping schemes. Int J Numer Meth Engng 1998;
41:781–814.
[37] Park KC, Chiou JC. Stabilization of computational procedures for
constrained dynamical systems. J Guidance, Control Dyn 1988;11:
365–70.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287286

[38] Park KC, Chiou JC, Downer JD. Explicit-Implicit staggered
procedure for multibody dynamics analysis. J Guidance, Control
Dyn 1990;13:562–70.
[39] Downer JD. A computational procedure for the dynamics of flexible
beams within multibody systems. PhD Thesis. University of Color-
ado; 1990.
[40] Cardona A, Geradin M. A beam finite element non-linear theory with
finite rotations. Int J Numer Meth Engng 1988;26:2403–38.
[41] Spring KW. Euler parameters and the use of quaternion algebra in the
manipulation of finite rotations: a review. Mech Mach Theory 1986;
21:365–73.
[42] Meyer B. Object-oriented software design. New Jersey: Prentice-Hall;
1988. ISBN: 0-13-629049-3 or 0-13-629031-0 PBK.
[43] Cox BJ. Object-oriented programming: an evolutionary
approach. Reading, MA: Addison-Wesley; 1986. ISBN: 0-201-
10393-1.
[44] Fenves GL. Object-oriented programming for engineering software
development. Engng Comput 1990;6:1–15.
[45] Miller GR. An object-oriented approach to structural analysis and
design. Comput Struct 1991;40(1):75–82.
[46] Rumbauch J, Jacobson I, Booch G. The unified modeling language
reference manual. Reading, MA: Addison-Wesley; 1999.
[47] Dufosse F. Approche orientee objet appliquee a la conception d’un
logiciel dedie a l’analyse des systemes multicorps. Thesis. Universite
Henri Poincare, Nancy I; 2001.
[48] Dufosse F, Kromer V, Mikolajczak A, Gueury M. Simulation of 3D
polyarticulated mechanisms through object-oriented approach. In:
Mastorakis N, editor. Problems in modern applied mathematics,
mathematics and computers in science and engineering. 2000. p. 84–9.
[49] Surana KS, Sorem RM. Geometrically non-linear formulation for
three dimensional curved beam elements with large rotations. Int J
Numer Meth Engng 1989;28:43–73.
V. Kromer et al. / Advances in Engineering Software 35 (2004) 273–287 287
















![Object-oriented programming of adaptive finite element …jinnliu/proj/Device/1996OOP.pdf · Object-oriented programming of adaptive finite element and ... adaptive analysis ... [36]](https://img.dokumen.tips/doc/110x75/5b14d55b7f8b9af15d8c1bb0/object-oriented-programming-of-adaptive-finite-element-jinnliuprojdevice-.jpg)












