Embed Size (px)
Citation preview

A li ti & ThApplications & Theory
Azadeh [email protected]
Professor K N PlataniotisProfessor K.N. PlataniotisProfessor A.N. Venetsanopoulos

Presentation Outline2
Part I: The case for WLAN positioning
2
HistoryApplicationsO i & h llOverview & challenges
Part II: TheoryMemoryless positioningTracking A cognitive design

P I Th C f WLAN P i i iPart I: The Case for WLAN Positioning
HiHistoryApplications Overview & challenges

Positioning4
Objective:
4
Determine physical coordinates of a mobile terminal
Historical perspective:St di d id l f th t fi d dStudied widely for the past five decadesLimited to military/civilian target tracking & navigationnavigation
Renewed interest: mobile computingRenewed interest: mobile computing

Mobile Computing5
Motivated by advances in wireless that allow ti h ti
5
computing anywhere, anytime
Mobility has led to new needsLocation-dependent resource & information needs
Mobility has sparked new applicationsLocation-based services

Location-Based Services6
Radio/map information
Position informationNetwork Provider
6
Position information
Authentication
Network Provider
Location-based management
Location server
Resource allocation
Friend Finder services
Proactive resource deployment
Social networking
U t d t t
Content ProviderGeo-tagging/geo-blogging
Location metadata
User generated content
Location-based information
Geo-tagging/geo-blogging
Content server

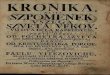
Location-Based Services7
250
300
7
100
150
200Number of subscribers(Millions)
0
50
100
2007 2008 2011
5
6
7
8
1
2
3
4
5Revenue in $
(Billions)
0
1
2007 2008 2011
Figures obtained from Gartner.

Positioning Technology8
Motivation:
8
To enable location-based service, accurate and timely location information is needed
Example technologies:Global positioning systemGlobal positioning systemCellular-based methods
In this talk, we focus on positioning in indoor environmentsenvironments

Indoor Positioning9
Motivation:
9
GPS & cellular systems provide limited coverage in indoors
Objective:D t i h i l di t f d t i Determine physical coordinates of a pedestrian carrying a wireless device in an indoor environmentenvironment

Indoor Positioning Solutions1010
Technology Accuracy Cost Complexity Invasive
RFID 10 M di L YRFIDs <10m Medium Low Yes
Visual centimeters High High YesVisual surveillance
centimeters High High Yes
Radio (WLAN) <10m Low Low No( )tracking

WLAN Tracking: Basic Idea11
WLAN radio signal features depend on distance b t i & t itt
11
between receiver & transmitter
Measure signal features to determine locationTime of Arrival
d ff f lRequire additional
Time difference of ArrivalAngle of ArrivalR i d Si l St th (RSS)
Require additional hardware
Received Signal Strength (RSS)

RSS-Based Tracking: Motivation12
Inexpensive
12
No additional hardware needed
ScalableUbiquitous deployment
Non-invasiveRequires cooperation of mobile device

The Setup13
Pedestrian carries a WLAN-capable device
13
L access points 3
Unknown positions
1
)(2 kr)(3 kr
)(4 kr
)(1 kr )(kr L
Mobile measures RSS vector at time k
TL krkrk )](,),([)( 1 L=r

The Problem14
Given a sequence of RSS measurement over time
14
)}(,),1({)( kk rrR L=
Estimate a sequence of position estimates
)(ˆ,),1(ˆ kpp L

Technical Challenges15
Functional form of RSS-position relationship ll k
15
generally unknownSevere multipath, shadowingP ti d l i ffi i t t d ib Propagation models insufficient to describe spatial variations
A. Kushki, K.N. Plataniotis, A.N. Venetsanopoulos, “Indoor Positioning with Wireless Local Area Networks”, in the Encyclopedia of Geographical Information Sciences, 2008.

Technical Challenges16
RSS measurements depend on unpredictable i t l f t
16
environmental factorsMoving people, doors, humidity, etc.
RSS t ti t fi d RSS measurements vary over time at fixed locationsVariations do not obe ell kno n distrib tionsVariations do not obey well-known distributions

Location Fingerprinting17
Characterize RSS-position dependency through t i i b d th d
17
training-based method
yConstruct a radio map
( ) ( ){ })()( FF R ( ) ( ){ })(,,,)(, NN pFppFp L11 R =
Tyx ][ h i
N: Number of anchor points
Tyi
xi pp ][=ip : anchor point
[ ])()1()( nii rrpF L=i : fingerprint matrix
x
n: Number of RSS samples per anchor points
[ ])()1()( nii rrpF i : fingerprint matrix

Outline of Solutions18
Kernel density estimation for fingerprinting-b d iti i
18
based positioning
N t i I f ti FiltNonparametric Information FilterImprove positioning accuracy by incorporating knowledge of pedestrian motion dynamicsknowledge of pedestrian motion dynamics
Cognitive design to deal with unpredictable RSS Cognitive design to deal with unpredictable RSS variations through sensor selection

P t II ThPart II: Theory
M l i i iMemoryless positioningTracking A cognitive design Conclusion and future work

Memoryless Positioning20
Objective: given an RSS measurement, d t i iti ti t
20
determine a position estimate
)(kr )(ˆ kp?)(kr )(kp?
Optimality criterion: minimum mean square
Radio map
error (MMSE)
}||)()({||minarg)(ˆ 2kkEk ppp (( −= }||)()({||minarg)( kkEk ppp p(

MMSE Estimation21
MMSE estimate is given as
21
)}(|)({)(ˆ kkEk rpp = ( )∫= )()(|)()( kdkkfk prpp
unknown
Approximate the posterior density
unknown
HistogramKernel density estimator
N
∑∑ =≈ N
i i
N
i ii
w
wk
1
1)(ˆp
p
A. Kushki, K.N. Plataniotis, A.N. Venetsanopoulos, “Kernel-based Positioning in Wireless Local Area Networks”, IEEE Transactions on Mobile Computing, 6(6), pp.689-705, 2007.
∑ =i i1

Memoryless MMSE Estimator22
RSS observationRadio map
22
RSS rep extraction
11pw)1(1r
)(1 nr1r
+ )(ˆ krpRSS rep
KDE
)(1 nr
)1(r pextraction
NNw p)1(Nr
)(nNrNr
Temporal processing Spatial processing
n: Number of RSS samples per anchor points
( )rΣrr ,);( ii kw N=N: Number of anchor points

Performance Evaluation23
Evaluation data collected in a real office
23
RSS measured using public software on a laptop
4646m
42
Performance measure: root mean square
42m
positioning error

Test Conditions24
Capture environmental variations
24
Training & testing sets collected on different daysOrientation mismatch
Two motion scenarios consideredStationary user
352 test cases (44 locations)
Mobile userMobile user34 paths

Experimental Results2525
Method Stationary user(Average RMSE)
Mobile user(Average RMSE)
Complexity
KNN 3.18m 5.85m O(dN)
Histogram 3.22m 5.68m O(bdN)
Kernel Density 2.90m 5.70m O(dN)
n: Number of RSS samples per anchor pointsd: Number of access pointsb: Number of histogram bins
N: Number of anchor pointsn: Number of RSS samples per anchor points

P t II ThPart II: Theory
M l i i iMemoryless positioningTracking A cognitive design Conclusion and future work

Tracking27
Objective: given the RSS observation record, d t i iti i ti t ti
27
determine positioning estimates over time
Dynamic model
)(ˆ kp?)}(,),1({)( kk rrR L= )(p?
Radio map
)1(ˆ,),0(ˆ −kpp L
)}(,),({)(
Exploit knowledge of pedestrian motion
Radio map
dynamics to refine RSS-based estimates

Tracking28
Traditional approach: Bayesian filtering
28
Estimate the hidden state of system given observable RSS measurements Kalman filter & extensions particle filterKalman filter & extensions, particle filter
Challenge:Challenge:Lack of an explicit relationship between RSS & positionspositionsComputational complexity
A. Kushki, K.N. Plataniotis, A.N. Venetsanopoulos, “Nonparameteric Techniques for Pedestrian Tracking in Wireless Local Area Networks”, to appear in the Handbook on Sensor and Array Processing.

Bayesian Filtering: State Vector29
Contains all variables needed to describe the l ti f th t t f t
29
evolution of the state of a systemIn general, many parameters needed to describe pedestrian motionpedestrian motion
Simplifying assumption: In indoor office spaces Simplifying assumption: In indoor office spaces, movements constrained by physical structure

The State Vector30
Assuming linear motion, define the state vector
30
where,])()()()([)( Tyyxx kvkpkvkpk =x
kkpkp yx time at scoordinate pedestrian is )]()([ kkpkp time at scoordinate pedestrian is )]()([kkvkv yx time at velocity pedestrian is )]()([
The dynamic model is )()()1( kkk ωFxx +=+
Initial state:System matrix: F,System noise: )0()( Qω k N
),(~)0( 00 Pxx ,N
System noise: ).0(~)( Qω ,k N

MMSE Tracking31
MMSE estimate of the state is defined as
31
}||)()({||minarg)(ˆ 2kkEk xxx x(
( −=
MMSE estimate is given as
)}(|)({)|(ˆ kkEkk Rxx =
( )∫ ( )∫= )()(|)()( kdkkfk xRxx
unknown

Bayesian Filtering32
Estimate the posterior density recursively in two t
32
stepsPredictionC tiCorrection
prediction correctionprediction correctionEstimate at k-1 Predicated
estimate at kEstimate at k
Dynamic model Measurement model Dynamic model Measurement model RSS observation

Bayesian Filtering: Prediction33
Use the dynamic model to predict the state i th i ti t
33
given the previous estimate
)1|(ˆ)1|1(ˆ → kkkk xx )1|()1|1( −→−− kkkk xx
Since a linear-Gaussian dynamic model is assumed, prediction is the same as traditional K l filt i gKalman filtering

Bayesian Filtering: Correction34
Use measurements to refine predicted estimate
34
Requires measurement model that relates RSS observations to the stateobservations to the state
Explicit measurement model not available in Explicit measurement model not available in fingerprinting!
The Nonparametric Information (NI) Filter
A. Kushki, K.N. Plataniotis, A.N. Venetsanopoulos, “Cognitive Dynamic Radio Tracking in Indoor Wireless Local Area Networks”, submitted to the IEEE Transactions on Mobile Computing.

The Nonparametric Information Filter35
)1|1(ˆ −− kkx )1|1( −− kkPRSS observationRadio map
35
Dynamic modelMemoryless estimator
)1|( −kkP)(ˆ krx )(krP
Dynamic modelMemoryless estimator
)1|(ˆ −kkx )|(
NI filter
)(r )(r )|(
)|(ˆ kkx )|( kkP
( ))(ˆ)()1|(ˆ)1|()|()|(ˆ 11 kkkkkkkkkk rxPxPPxr
−− +−−=)()1|()|( 111 kkkkk −−− +−=
rPPP

Experimental Results36
Method Stationary user(Average RMSE)
Mobile user(Average RMSE)
Complexity
36
(Average RMSE) (Average RMSE)
Memoryless 2.90m 5.70m O(dN)
Kalman filter 2.75m 5.41m O(dN)
Particle filter 2.44m 5.16m O(dNNpart)
NI filter 2.29m 4.58m O(dN)
N: Number of anchor pointsd: Number of access points
Npart: Number of particles (Npart =1000)
All filters use same memoryless estimator
p
All filters use same motion model

P t II ThPart II: Theory
M l i i iMemoryless positioningTracking A Cognitive design Conclusion and future work

A Cognitive Design38
Motivation:
38
NI filter builds its knowledge of the environment through RSS observations & radio mapConditions during tracking may be different than Conditions during tracking may be different than those learned from fingerprints
Objective: Mitigate adverse effects of unpredictable Mitigate adverse effects of unpredictable environmental variations

A Cognitive Design39
Basic idea:
39
Proactively adapt sensing and estimation parameters based on predicated operating conditionsconditions
Approach: adaptive radio scene analysisApproach: adaptive radio scene analysisAnchor point selection
RSS-position relation is many-to-manyRSS position relation is many to many
Access point selection Number of available access points >>3p

Adaptive Radio Scene Analysis40
Determine region of interest (ROI) using f db k
40
feedbackUse only anchor points in ROI for positioningE l t i t l ti it i ROIEvaluate access point selection criterion over ROI
A. Kushki, K.N. Plataniotis, A.N. Venetsanopoulos, “Cognitive Dynamic Radio Tracking in Indoor Wireless Local Area Networks”, submitted to the IEEE Transactions on Mobile Computing.

The Cognitive Design4141
Anchor point selection
State Prediction
Outlier Mitigation
Memorylessestimator
State Estimation
PositionEstimate
Mitigation
Access Point selection
Adaptive Scene Analysis NI filter
RSS observationRadio map
Two levels of feedbackLocal (NI filter)Gl b l (S l i )Global (Scene analysis)

Experimental Results42
Method Stationary user Mobile user Complexity
42
(Average RMSE) (Average RMSE)
Memoryless 2.90m 5.70m O(dN)
NI filter 2.29m 4.58m O(dN)( )
NI filter + anchor point selection 2.31m 3.96m O(dN’)
NI filter + anchor point selection + access point selection
2.07m 2.51m O(dN’) access point selection
d N b f i t
N’: Number of selected anchor points (N’<N)N : Number of anchor pointsd : Number of access points

Example4343

P t II ThPart II: Theory
M l i i iMemoryless positioningTracking A cognitive design Conclusion and future work

Conclusions45
Location-based services (LBS) emerging area ith i ifi t i l i t
45
with significant commercial impact
WLAN positioning is an enabling technology for indoor LBS
I i & l blInexpensive & scalable
A li it d b lit f g ti Accuracy limited by quality of propagation channel
Use of motion dynamics sensor selectionUse of motion dynamics, sensor selection

Future Directions46
Fusion of multiple technologies to provide li bl iti i i i d / td
46
reliable positioning in indoor/outdoor environments
GPS radio videoGPS, radio, video
Privacy security an anonymity in positioning Privacy, security, an anonymity in positioning systems

Related Publications47
A. Kushki, K.N. Plataniotis, "Nonparametric Techniques for Pedestrian Tracking in Wireless Local Area Networks", to appear in Handbook on Sensor
47
and Array Processing, S. Haykin and K.J.R. Liu, Eds., IEEE-Wiley, 2009.
A. Kushki, K.N. Plataniotis, A. N. Venetsanopoulos, "Indoor Positioning with Wireless Local Area Networks (WLAN)", in the Encyclopedia of Geographical I f ti S i S Sh kh d H Xi Ed S i 566 571 Information Science, S. Shekhar and H. Xiong, Eds., Springer, pp.566-571, 2007.
A. Kushki, K.N. Plataniotis, A.N. Venetsanopoulos, "Kernel-based Positioning in Wireless Local Area Networks" IEEE Transactions on Mobile Computing in Wireless Local Area Networks , IEEE Transactions on Mobile Computing, 6(6), pp.689-705, 2007.
A. Kushki, K.N. Plataniotis, and A.N. Venetsanopoulos, "Sensor Selection for Mitigation of RSS-based Attacks in Wireless Local Area Network Positioning", Mitigation of RSS based Attacks in Wireless Local Area Network Positioning , in the proceedings of the International Conference on Acoustics, Speech, and Signal Processing (ICASSP), pp. 2065-2068, 2008.