Embed Size (px)
Citation preview

American Institute of Aeronautics and Astronautics1
AIAA-99-3136
DETERMINATION OF STABILITY AND CONTROL DERIVATIVES USINGCOMPUTATIONAL FLUID DYNAMICS AND AUTOMATIC DIFFERENTIATION
Michael A. Park*
George Washington UniversityJoint Institute for the Advancement of Flight Sciences (JIAFS)
Lawrence L. Green†
NASA Langley Research Center, Hampton, [email protected]
Raymond C. Montgomery‡
NASA Langley Research Center, Hampton, [email protected]
David L. Raney§
NASA Langley Research Center, Hampton, [email protected]
AbstractWith the recent interest in novel control effectors
there is a need to determine the stability and controlderivatives of new aircraft configurations early in thedesign process. These derivatives are central to mostcontrol law design methods and would allow thedetermination of closed-loop control performance of thevehicle. Early determination of the static and dynamicbehavior of an aircraft may permit significantimprovement in configuration weight, cost, stealth, andperformance through multidisciplinary design. Theclassical method of determining static stability andcontrol derivatives—constructing and testing wind tunnelmodels—is expensive and requires a long lead time forthe resultant data. Wind tunnel tests are also limited tothe preselected control effectors of the model. Toovercome these shortcomings, computational fluid
*Graduate Student, NASA Langley Research Center, Multidisciplinary
Optimization Branch, MS 159, Hampton, Virginia, Member AIAA
†Research Scientist, Multidisciplinary Optimization Branch, MS 159,
Senior Member AIAA
‡Research Scientist, Dynamics and Control Branch, MS 132, Senior
Member AIAA
§Research Scientist, Dynamics and Control Branch, MS 132, Member
AIAA
Copyright 1999 by the American Institute of Aeronautics, Inc. Nocopyright is asserted in the United States under Title 17, U.S. Code.The Government has royalty-free license to exercise all rights under thecopyright claimed herein for government purposes. All other rightsreserved by the copyright owner.
dynamics (CFD) solvers are augmented via automaticdifferentiation, to directly calculate the stability andcontrol derivatives. The CFD forces and moments aredifferentiated with respect to angle of attack, angle ofsideslip, and aircraft shape parameters to form thesederivatives. A subset of static stability and controlderivatives of a tailless aircraft concept have beencomputed by two differentiated inviscid CFD codes andverified for accuracy with central finite-differenceapproximations and favorable comparisons to asimulation database.
IntroductionPrevious work attempted to determine stability
derivatives from computational fluid dynamics (CFD)codes; for example, Finley1 used an Euler code tocompute the forces and moments for a genericconfiguration from which a subset of the stabilityderivatives can be inferred by using finite-differencemethods. Charlton2 employed a similar method on theLockheed Martin Tactical Aircraft Systems—InnovativeControl Effectors (LMTAS-ICE)¶ configuration. Noattempt was made to compute those derivativesanalytically.
The present work proposes to use one or more CFDsolvers, augmented via automatic differentiation (AD), todirectly calculate static stability and control derivativesof the LMTAS-ICE configuration. Using exact AD is
¶The use of trademarks or names of manufacturers in this report is for
accurate reporting and does not constitute an official endorsement,either expressed or implied, of such products or manufactures by theNational Aeronautics and Space Administration

American Institute of Aeronautics and Astronautics2
more robust and removes the requirement of determiningthe optimal step size for the finite-difference calculation.This AD technique is illustrated with potential and Eulerflow solvers, but can also be extended to Reynolds-averaged Navier-Stokes (RANS) flow solvers to includeviscous effects. The potential and Euler flow solveroutputs (forces and moments) are differentiated withrespect to the angle of attack and the angle of sideslip,yielding a subset of the static stability derivatives.
For control effectiveness, various control effectorscan also be tested and optimized by finding thesensitivity of aircraft moments to changes in theconfiguration grid points that define these effectors.Because they are of greater importance to aircraftcontrol, only moments were differentiated for controleffectiveness, although the method is equally applicableto forces.
Automatic DifferentiationAutomatic differentiation3–5 is a technique for
augmenting computer programs with statements for thecomputation of derivatives. It relies on the fact that everyfunction, no matter how complicated, is executed on acomputer as a (potentially very long) sequence ofelementary operations such as additions, multiplications,and elementary functions such as sine and cosine. Byrepeatedly applying the chain rule of differential calculusto the composition of those elementary operations,derivative information can be computed exactly and in acompletely automated fashion.
Two approaches for computing derivatives with ADare the forward mode and the reverse mode. The forwardmode applies the chain rule of differentiation topropagate, equation by equation, derivatives ofintermediate variables with respect to the input variables.In contrast, the reverse mode (adjoint) propagates, inreverse through the program, the derivatives of the outputvariables with respect to the input variables. The forwardmode is more suited to problems with fewer inputvariables than output variables, whereas the reverse modeis better suited to problems with fewer output variablesthan input variables. Many hybrids of the forward andreverse modes are possible, with complementarytradeoffs in required random access memory (RAM),disk space, and execution time.
The forward method of AD is implemented in theADIFOR3 (Automatic Differentiation of FORTRAN)tool. The reverse mode is used in another tool,ADJIFOR5 (Automatic Adjoint Generation inFORTRAN). The ADIFOR and ADJIFOR tools havebeen developed jointly by the Center for Research onParallel Computation at Rice University and theMathematics and Computer Sciences Division atArgonne National Laboratory. Both techniques areavailable in the prototype ADIFOR 3.0 package recentlyprovided to the NASA Langley Research Center by Rice
University for alpha testing. In general, to applyADIFOR or ADJIFOR to a given FORTRAN 77 code,the user is only required to specify those programvariable names that correspond to the independent anddependent variables of the target differentiation. EachAD tool then determines the variables that requireassociated derivative computations, formulates theappropriate forward or reverse mode derivativeexpressions, and generates new FORTRAN 77 code forthe computation of both the original simulation and theassociated derivatives.
Currently, some manual processing is required toformulate the adjoint of iterative and parallel message-passing codes due to the prototype nature of the alphaversion of ADJIFOR used in this study. These manualmanipulations of the code are expected to be greatlyreduced with the formal release of the ADIFOR 3.0package to the general public. This release is planned forthe summer of 1999.
Computational Fluid Dynamics SolversThe PMARC6 (Panel Method Ames Research Center)
potential flow solver is a FORTRAN 77 code that cancompute surface pressures, forces, and moments ofarbitrary shapes. The code is based on the assumption ofinviscid, irrotational, and incompressible flow, with someboundary layer and compressible corrections available,but not implemented in this study. PMARC also has alimited capability to compute solutions of unsteady,time-varying flow conditions.
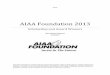
The input file to the program includes the set of gridpoints describing the shape of the geometry as a set ofpanels. In this study, both the right and left halves of theLMTAS-ICE (Fig.1) configuration are modeled in thePMARC input file, with a total of 2560 panels. PMARCallows half the aircraft to be described and the solution tobe mirrored in the x-z plane. Although describing onlyone half of the configuration would reduce the time andmemory required for a converged solution, this techniquewould not capture the effects of a nonzero angle ofsideslip. The input file also specifies the flight condition,certain algorithmic parameters, and the user-definedposition of the reference point about which all momentsare summed. The forces and moments are alsonondimensionalized with a user-specified reference area,length of the mean aerodynamic chord, and wingspan.All runs were performed with the assumption ofincompressible flow or low-speed flight conditions.
The original PMARC code uses swap or scratch filesto record intermediate values during operation. This diskusage allows PMARC to solve problems with a largenumber of panels on machines with limited RAMcapacity. ADIFOR and ADJIFOR ignore FORTRANread and write statements and are therefore unable tofollow the dependency of variables through scratch fileread and write operations. To allow the application of

American Institute of Aeronautics and Astronautics3
AD, the PMARC code was modified to eliminate theneed to use scratch files during execution. Thesemodifications entailed replacing scratch file read andwrite operations with equivalent operations to commonblocks during AD code generation. If sufficient RAM isnot available for executing the code with the commonblocks in the AD-generated code, the scratch fileoperations can be reactivated following code generation.To further minimize the use of RAM, scratch fileoperations for the new AD-created variables containingderivative information can also be inserted into the codein a fashion complementary to the original variables.
The forward mode of differentiation (ADIFOR) wasused to compute the stability derivatives because thereare two inputs—angle of attack and angle of sideslip—compared to the six output forces and moments. Thereverse mode (ADJIFOR) is employed to calculate thederivatives used for guidance in the optimization ofcontrol effector size and placement, because thethousands of independent variables greatly outnumberthe six dependent variables. The independent variables ofthese derivative calculations are the normaldisplacements of each of the surface-defining grid points.Normal displacements were chosen to mimic aninflatable device. The outputs are the three momentcoefficients, each evaluated in three separate codeexecutions.
Typical execution times for the original PMARCcode are about four minutes on one R10000 processor ofa Silicon Graphics Octane. The forward ADIFOR-generated PMARC aerodynamic analysis, includingangle of attack and angle of sideslip derivatives, requiredapproximately 12 minutes for the same single-processorexecution scheme. The calculations were performed in64-bit arithmetic with versions of codes that had allscratch file operations replaced with common blocks.The RAM requirements were 160 Mbytes for thePMARC function and 480 Mbytes for the function plusits derivatives with respect to angle of attack and angle ofsideslip. The control derivatives of each separate momentwith respect to the normal displacement of all the gridpoints is determined with the ADJIFOR reverse mode.This calculation was performed on the NASA LangleyHigh Performance Computing and CommunicationProgram (HPCCP) sixteen-processor Silicon GraphicsOrigin 2000 in 20 minutes with one processor. Thememory requirements are 171 Kbytes RAM and 6Gbytes of disk storage. Information from each of the overfifty iterations required to solve the aerodynamicinterference coefficient matrix is stored to disk. Thisinformation is used to formulate the adjoint solution.The code can be modified to iterate the adjoint solutionto save disk space with an increased cost in codeexecution time.5
The CFL3D (Computational Fluids Laboratory3-Dimensional) code is a FORTRAN 77 Reynolds-
averaged thin-layer Navier-Stokes flow solver forstructured-volume grids. The analysis for this study wasperformed in an inviscid, Euler mode. The single-processor sequential version was differentiated into aversion with angle of sideslip as the only independent inthe derivative calculation. The code was onlydifferentiated with respect to angle of sideslip toinvestigate a change in the simulation databasederivatives between 5 and 7.5 deg angle of attack. Workis ongoing to automatically differentiate the latestprerelease version of CFL3D. This work includes aparallel execution scheme that would allow fasterderivative determination in both angle of attack and angleof sideslip. The volume grid used to model the airflowabout both halves of the ICE configuration contains3.1 million grid points.
The force and moment calculations were performedwith a single processor of the HPCCP Silicon GraphicsOrigin 2000 with mesh sequencing and multigridconvergence acceleration on three levels. Timings areapproximately 0.98 second per coarse-grid iteration, 18seconds per medium-grid iteration, and 230 seconds perfine-grid iteration. The total time for a functionevaluation was 18 hours. The sequential version required825 Mbytes RAM. The inclusion of angle of sideslipderivatives caused a 500 percent increase in thesequential execution time and required 1600 Mbytes ofRAM. The timing difference is possibly due to poorcache memory usage and AD overhead. This differencein execution time is further magnified by the use ofaggressive compiler options, which are more effective onthe original code. A parallel execution scheme employing8 processors has demonstrated a 600 percent speedupfrom 18 to 3 hours for determining forces and moments.The differentiation of this parallel code may allow thesestability derivatives to be calculated quickly enough tointegrate this derivative determination into a designprocess.
LMTAS-ICEThe LMTAS-ICE is a proposed configuration that is
used by NASA to test the synergy of low-observabletechnologies with new types of control effectors.7 Thegoal is a lightweight, low-observable, and highlymaneuverable aircraft. The basic layout of the aircraft isa tailless, highly swept delta shape with integrated wing,body, and propulsion systems (see Fig.1). One of thegoals of the LMTAS-ICE program is to investigate awide range of conventional and novel control effectorsfor their impact on controllability, weight, and stealth.
The LMTAS-ICE configuration is a challengingaerodynamic problem for a potential flow solver such asPMARC because of a sharp leading edge and predictedhigh Mach numbers near the wing tips at cruiseconditions. The combination of sharp leading edges and ahighly swept planform can give rise to vortical flow at

American Institute of Aeronautics and Astronautics4
moderate to high angles of attack. Vortical flow is notmodeled in the PMARC potential flow solver, but ismodeled in the CFL3D Euler calculation. To furtherresolve these flow effects and to model some novelcontrol effectors such as the synthetic jets, a fine-gridRANS solution may be required. PMARC analysis ismost suited to the low angle of attack region (0 to 6 deg)of this aircraft’s flight envelope, where the airflow isattached to the aircraft and where most cruise portions ofa flight take place. This investigation was extended to anEuler code when the PMARC-calculated lateralderivatives showed nonideal (possibly unacceptable)correlation with the simulation database at larger anglesof attack. Euler calculations may be more suited to thesehigher angles of attack and angles of sideslip (6 to 15deg). Highly separated and time-varying flow conditions(>15 deg) may require the investment of time-dependentRANS calculations to correctly predict derivatives.
In spite of these concerns, PMARC was chosen forthe initial work in this study because of its potential forrapid code execution and the option to solve either steadyor unsteady flows. The LMTAS-ICE was chosen becauseof the existence of a wind-tunnel-based aerodynamicdatabase and a desire to optimize control effectors for theconfiguration. There is also a desire to develop a"seamless" aircraft control scheme,7 where aircraftattitude is controlled with slight mold-line distortionsrather than with hinged moving surfaces. These novelcontrol effectors are designed to keep the flow attachedand therefore lend themselves to the linear aerodynamictheory of PMARC. The ADJIFOR modification of CFDcode is well suited to the task of finding guidance for theoptimal definition of these continuous shape-morphingcontrols.
Validation of ADby Central Finite Differences
The first step in verifying the accuracy of theADIFOR-generated version of PMARC was to comparethe forces and moments of the ADIFOR-generatedPMARC code to the forces and moments of the originalversion of PMARC. This comparison showed nosignificant discrepancies. The derivatives were thenchecked for accuracy using second ordercentral-difference approximations. The cruise conditionof 4.39 deg angle of attack (α), 0 deg angle of sideslip(β), and 0.60 Mach was chosen as the point about whichto perform the finite differencing. By, treating the forcesand moments PMARC outputs as a function (P) of angleof attack or sideslip (A), the central-difference value ofthe force or moment derivative is calculated as
The deltas (∆), changes in angle of attack andsideslip, are chosen between 0.0001 and 5 deg (see Table1). The value of the computed derivative is plotted as afunction of the logarithm of ∆ (Fig. 2). The dashedhorizontal line is the ADIFOR-computed derivative. Thesymbols CN, CA, and CS represent the nondimensionalcoefficients of aerodynamic forces referenced to the bodyaxes in the directions upward, aft, and toward the rightwing tip as shown in Fig.1. Figure 2a, 2b, and 2d show acomparison of the force derivatives. The symbols Cl,Cm, and Cn represent the nondimensional coefficients ofmoments in the roll, pitch, and yaw axes as shown inFig.1. Figure 2c, 2e, and 2f show the moment derivativecomparisons.
For small ∆, the central-difference calculations areequal to the ADIFOR values of the static stabilityderivatives for more than six significant figures. Thedifference between the central-difference approximationand ADIFOR derivative value grows larger with ∆. A logscale for ∆ was used in the figures. In this ADIFORstudy, the central-differences are relatively insensitive tothe size of ∆. Previous ADIFOR finite-differencevalidation studies3–5 done with viscous Navier-Stokescalculations showed a much greater sensitivity to the ∆size. This sensitivity is possibly due to both the nonlinearnatures of the transonic Navier-Stokes codes for theproblems investigated and the uses of first order one-sided finite-difference approximations in the previousstudies. One-sided finite-difference or central-differenceapproximation comparisons were not made to theADIFOR-generated CFL3D Euler derivatives because ofthe computer time required for the many lengthyexecutions. Instead, the validity of the derivatives wasinferred by direct comparisons to PMARC andwind-tunnel-based derivatives. Each PMARCcentral-difference approximation required fourexecutions (two angle of attack and two angle of sideslipperturbations) of the PMARC code. Therefore, the timerequired for the code execution of a central-differenceapproximation was approximately 16 minutes. Incontrast, all the derivatives can be computed in a singlerun (about 12 minutes) of the ADIFOR-generatedPMARC code. This difference in processing timerequired for these two approaches willbecome more significant in problems with moreindependent variables or more time-consuming, higherfidelity flow calculations.
Force and Moment Comparisonto Simulation Database
The ADIFOR application of PMARC has been shownto produce the correct derivatives of its calculated forcesand moments. The ADIFOR-generated PMARC andCFL3D codes are now further verified by comparingthese results to the simulation database derived from
( ) ( ))(
22∆+
∆∆−−∆+=
∂∂
OAPAP
A
P

American Institute of Aeronautics and Astronautics5
wind tunnel data (see Fig. 3 and Tables 2–4). Note thatthe data at angle of sideslip not equal to zero (Tables 3and 4) is shown as the difference between the displacedangle of sideslip (β) data and data taken at zero angle ofsideslip for the same angle of attack. All calculationswere performed at a Mach number of 0.60.
The wind tunnel data that is presented for comparisonto the PMARC results was taken from an aerodynamicdatabase used for a flight simulator. The way that thewind tunnel data was gathered and reduced to form thedatabase needs to be researched. Further understandingof the methods used to convert the wind tunnel data intothe simulation aerodynamic database may help to explainsome of the differences between the aerodynamicdatabase and PMARC in the lateral coefficients (CS, Cl,and Cn Fig. 3d–3f). These differences could also behighlighting flow properties not modeled in PMARC.
In an effort to improve the correlation between windtunnel data and the values from PMARC and CFL3D, anestimate was sought of the drag component missing fromthe inviscid code calculations. This delta coefficient ofdrag (∆CD0) was estimated by subtracting the axial forcecoefficient (CA) of the wind tunnel data from thecorresponding value in PMARC when the normal forcecoefficients of both are near zero (see Fig. 3b). The ∆CD0
calculation is made when the normal force is near zero sothat any lift-induced drag component of ∆CD0 isminimized. In the absence of wind tunnel data, anestimate of ∆CD0 can be based on theoretical skinfriction calculations. The ∆CD0 oriented along the windvector is resolved into the CA, CN, and CS directions forall angles of attack and angles of sideslip. The force andmoment reference center for the configuration is locateda distance (∆Z) below the centroid of lateral area, wherethe ∆CD0 is assumed to act. Therefore, the ∆CD0
increment to the forces also causes additional moments.The equations used to increment the various PMARCand CFL3D forces and moments shown in Fig. 4 andTables 5a–5c are as follows:8
Following the addition of these increments, thePMARC values show excellent trend agreement up to 6
deg angle of attack. At higher angles of attack thepresumed predominance of vortical flow patterns starts toaffect the lateral-directional coefficients dramatically.(Lateral displacements to nonzero angles of sideslip werenot performed with CFL3D, but its accuracy can beinferred from the angle of sideslip derivatives computedwith ADIFOR.) In contrast, CFL3D correctly predictedthe change in lift slope, including changes due to leadingedge vortical flow. Note that a ∆CD0 for CFL3D couldalso be estimated independent of the calculation done forPMARC, but this estimation was not performed due tothe similarities between the results of these two codes.
Derivative Comparisonto Simulation Database
The longitudinal forces and moments shown in Fig. 3are differentiated with respect to angle of attack, and thelateral forces and moments are differentiated with respectto angle of sideslip. These derivative values are shown inFig. 5. The derivatives plotted for PMARC are the AD-generated values. The CFL3D derivatives arecentral-difference approximations for the longitudinalcases, and AD-generated values for the lateral cases.(Work is under way for AD-generated CFL3Dlongitudinal derivatives, but these derivatives were notavailable in time for this publication.) Second ordercentral differencing is performed on the simulationdatabase between 2 deg positive and 2 deg negative angleof sideslip for the lateral cases, and a weighted centralmethod is used for angle of attack derivatives because ofthe nonuniform spacing between points in thelongitudinal cases. CFL3D provides a better prediction ofthe normal force slope (Fig. 5a), but both CFL3D andPMARC have difficulty with the pitching momentderivative (Fig. 5c), possibly indicating the need for aviscous Navier-Stokes calculation. ADIFOR-generatedCFL3D lateral derivatives are similar to the ADIFOR-generated PMARC values at 2.5 and 5 deg angle ofattack. The lateral derivatives of the ADIFOR-generatedCFD codes agree reasonably well with wind tunnel databelow 6 deg angle of attack; then at higher angles ofattack the wind tunnel data changes radically whilePMARC remains linear.
The ADIFOR-generated CFL3D code converged tovalues near those of the wind tunnel at 7.5 deg angle ofattack for the coarse and medium grids. The 7.5 degangle of attack fine-grid derivatives converged tosignificantly different values (Fig 5e–5f), possiblyindicating the simulation of different flow physics on thisfiner mesh than the two coarser meshes. The predictionthat different flow phenomenon are being modeled isbased on truncation error arguments. The truncation errorof a CFD code is based on the difference between thediscretized partial differential equation representing theflow field in the code and the original continuous partial
CnCn
CDZCmCm
CDZClCl
CDCSCS
CDCACA
CDCNCN
Z
CD
=∆××∆+=
∆×××∆−=∆××−=
∆×+=∆×+=
===∆==
=∆
0
0
0
0
0
0
cosMAC/
sincosSpan/
sincos
cos
sin
SideslipofAngleAttackofAngle
ft0.9ft37.5Spanft28.75MAC
00868.0
αβα
βααα
βα

American Institute of Aeronautics and Astronautics6
differential equation. If the CFD solution is convergingto the same exact solution as the mesh is refined, thetruncation error of a CFD solution should decrease in apredictable manner. Because CFL3D is based on asecond order method, the truncation error should varylinearly with a square of a characteristic length of themesh. The forces, moments, and their derivatives arecomputed in the ADIFOR-generated CFL3D code as afunction of the discretized flow equations. Therefore,The forces, moments, and their derivatives should vary ina predictable second order manner as the mesh is refined.
The CFL3D-calculated forces, moments, andderivatives at lower angles of attack converged in apredictable manner as the mesh size was sequenced. Theforces and moments of the fine grid at 7.5 deg angle ofattack converged to values indicative of a second orderreduction in truncation error, whereas the derivatives didnot. Therefore, this flight condition of 7.5 deg angle ofattack is still under investigation.
The heightened sensitivity of lateral force andmoment coefficients to angle of sideslip (particularly atangle of sideslip equal to zero) at this higher angle ofattack can also be seen in the simulation database. (Thisdata is not shown here due to paper length constraints.)The wind tunnel measurements, from which thissimulation database was derived, were performed every 2deg, between positive and negative 10 deg angle ofsideslip. Therefore, the angle of sideslip derivatives atangle of sideslip equal to zero were computed betweenpositive and negative 2 deg angle of sideslip or afinite-difference step of 4 deg. The forces and momentsexhibit strongly nonlinear behavior as angle of sideslip isvaried at 7.5 deg angle of attack.
Finite-difference approximations of the lateralderivatives in the simulation database can be interpretedto be very sensitive to step size and to the angle ofsideslip about which the derivative approximation iscentered, due to the nonlinear nature of the wind tunneldata. Using a finite-difference method with a large stepsize (4 deg) masks the actual behavior of these nonlinearfunctions of angle of sideslip. From previous experience,it is expected that the AD-generated derivatives for CFDcodes that simulate the required flow physics present inthe full scale or wind tunnel models will prove to bemore accurate than derivatives of wind tunnelmeasurements obtained by coarse finite differences.
These Euler derivative calculations are expensiveexecutions in terms of CPU time, but these processesmay be more applicable to the design process if speedimprovement can be achieved by increased use of RAMcaching or parallel code execution. This derivativeinformation may also be combined with functioninformation to form response surfaces. Splines or otherinterpolation methods can be used to structure theseresponse surfaces from the high-fidelity flow simulationdata. These response surfaces can be used in the design
process. The use of these interpolation methods, forced tosatisfy the values of the function and its derivatives, mayallow the calculations to be performed at fewer flightconditions and still have the same resolution of aircraftforces and moments, as more numerous, function-onlycalculations.
PMARC Control Effectiveness DerivativesIn this study, ADJIFOR-generated control effective-
ness derivatives plotted as a function of controlplacement are used to provide guidance for the optimalplacement of shape change control effectors. The shapeof the aircraft is described in the PMARC input file as aset of panels, each designated by four corner grid points.The shape is modified by moving each of these gridpoints in and out a small amount along a vector normal tothe surface. The derivative of the forces and moments ofthe configuration is calculated with respect to the normaldisplacement of these grid points. Optimal placement ofthese controls is located in areas of large gradients of theforces and moments. The placement of these effectorsmust allow for coordinated control of all three momentssimultaneously because they may be highly coupled. Adeployment scheme that allows the control force to beapplied in a linear fashion with input command would bedesirable from a pilot or control designers perspective,because the control force of these effectors can be verynonlinear with deflection height and simultaneousapplication of nearby effectors. Identifying the optimallocations would permit a certain deflection of the skin tohave the largest effect on aircraft control. Controleffectors that may be used in this manner are flexible,inflatable surfaces, shape memory alloys, andpiezoelectrics.
This study focuses on the three moment coefficientsbecause of their greater importance to closed-loopcontroller design. Figure 6 shows the ADJIFOR-generated values of the control effectiveness contoursinterpolated over the aircraft surface. Figure 6a–6c showsthe control effectiveness of an upper surface deflectionon the three moments in the roll, pitch, and yaw axes,respectively. Figure 6e–6f shows the controleffectiveness of deflecting the lower surface of theconfiguration on the same three moments. Areas shadedin black and white offer the greatest amount of controleffectiveness, but should be avoided because they oftenlocated near each other indicating an unacceptable levelof sensitivity to effector location. Areas with colors in thered to pink range have larger contiguous areas, allowinga number of grid points to work together to generate apositive change in moment. Areas with colors rangingfrom blue to violet offer the same benefits for generatingnegative moments. The red and violet areas of the aircraftleading edge and slightly aft of the middle of the wingare currently being targeted for effector placement.Differentiating a new grid with more numerous, evenly

American Institute of Aeronautics and Astronautics7
distribution panels many produce a smoother data set.The control derivative discontinuities near the trailingedge of the model may be due to a greater sensitivity ofthe code near locations that it is enforcing the Kuttacondition.
A MATLAB application was developed tosystematically investigate the design and effectiveness ofthese mold-line changing control effectors. Theapplication reads in the coordinates, the ADJIFOR-generated PMARC control effectiveness, and directionsnormal to the grid points for the ICE configuration. Inthis MATLAB tool, the aircraft configuration is shownwith the control effectiveness derivatives interpolatedover the body, similar to Fig. 6.
The MATLAB tool allows the user to select a seriesof grid points and corresponding deflection heights for aproposed effector. An estimate for the effector iscalculated by multiplying the ADJIFOR-generatedPMARC effectiveness of each selected grid point by itsspecified normal displacement and then summing theproducts. The application also has the ability to constructan input file for PMARC with the deflected geometry.Undeflected PMARC results are subtracted from thedeflected PMARC calculation to determine the proposedeffectiveness of a unit displacement of the effector onforces and moments. The effectiveness of a finitedisplacement of these effectors is then compared to theADJIFOR-generated PMARC data and its prediction ofeffectiveness.
The subsequent figures show comparisons ofPMARC finite-difference calculations with the linearbuildup of ADJIFOR-generated PMARC controleffectiveness for the upper aircraft skin. Figure 7a showsa half span of the grid used as input to PMARC and theMATLAB tool. Some grid points are annotated todescribe where on the 41-span location by 17-chordlocation grid the comparisons are being made. The panelsaffected by the deflected grid points are highlighted ingray. Figure 7b–7d shows the deflected surfacefinite-difference value divided by theADJIFOR-generated PMARC estimate. Figure 7b showsbump height effectiveness prediction (for location 17, 2)is not very linear with bump height, but the ratio doesapproach 1.0, as expected, for small displacements. Theprediction of the effectiveness of spanwise extensions ofdeflected grid points from point 17, 2 outboard is shownin Fig. 7c. Similar chordwise extensions of deflected gridpoints from 17, 2 aft are shown in Fig. 7d. Both theseextensions are under predicted by ADJIFOR-generatedPMARC data because of the nonlinearity of theeffectiveness with deflection height and the relativelylarge deflection used. The spanwise extensions shown inFig. 7c were performed along row 2, very near theleading edge with a bump height of 0.2 ft. The chordwiseextensions shown in Fig. 7d had a deflection of 0.2 ft andwere performed at a constant span location of column 17.
It should be noted that theses comparisons are notstrictly valid because the proposed effectors representrelatively large, discrete changes to the surface, while theADJIFOR derivatives are valid for individual,incrementally small, continuous changes in the surfaceshape. Nevertheless, the ADJIFOR derivatives of thethree aircraft moments provide information useful to thecontrols designer.
Figure 8 shows the calculated control effectivenessvalues in terms of the change in the moment coefficients.The resulting change in moment coefficient of theaircraft (∆Cl, ∆Cm, and ∆Cn) due to a deflection of asingle point is depicted in Fig. 8. These plots help toportray how the effectiveness of deflecting a single pointto a height of 0.2 ft varies over the upper surface of thePMARC grid. Chord location is varied while holding thespan location fixed at column 17 in Fig. 8a–8c. Figure8d–8f, conversely, varies span location while holding thechord location fixed at chord row 2.
The finite-difference and ADJIFOR-derivedeffectiveness follow similar trends, with thefinite-difference generally predicting greatereffectiveness. Due to the similar trend informationbetween the two estimates, the ADJIFOR-derivedprediction is able to give high fidelity guidance tooptimally place these effectors but not predict theeffectiveness of large discrete deployments.
In a previous paper,7 the ICE configuration wasshown to have satisfactory longitudinal control anddamping characteristics. A preliminary stabilityaugmentor was designed to compensate forunsatisfactory lateral-directional characteristics by usingshape-morphing control effectors. In a follow-on paper,the surface description of the control effector and itsmaximum normal displacement may be investigated andquantified to show the feasibility of generating thesemoments. The original study used a shape-change devicethat was chosen arbitrarily with only the aid ofengineering judgment. The process used in the previousstudy will be repeated to test the control effectorsdesigned with information derived from an adjointformulation of the PMARC CFD code.
ConclusionsThe ADIFOR-generated CFD codes agree with the
original code forces and moments. The differentiatedPMARC code outputs compare well tocentral-finite-difference approximations with step sizessmaller than 0.5 deg. The PMARC longitudinalcoefficients CN, CA, and Cm, incremented with ∆CD0,compare quantitatively with the wind tunnel data up to 6deg angle of attack. PMARC lateral coefficients CS, Cl,and Cn compare qualitatively with wind tunnel data witha constant difference between zero and 6 deg. Windtunnel data trends change drastically above 6 deg angleof attack, whereas the PMARC results remain linear.

American Institute of Aeronautics and Astronautics8
This linear region below 6 deg angle of attack is theprimary area of interest for the initial optimization ofshape morphing control effectors. CFL3D predicts achange in forces, moments, and derivatives above 6 degangle of attack. The ADIFOR-generated CFL3D coderequires lengthy execution time, but may be placed into adesign loop if speed improvements can be obtained fromincreased use of RAM caching or an implementation ofparallel code.
The ADJIFOR-generated PMARC code gavesuperior insight into the placement of relatively largedisplacement, discrete, and multi-effector shape-changecontrol devices. ADJIFOR generally underpredictedeffectiveness for these larger displacements because thecode is only strictly valid over incrementally small,individual displacements, but was almost always of thecorrect sign.
The application of automatic differentiation to CFDcodes has great potential for predicting stability andcontrol derivatives. The calculation of these derivativescan now occur in the early design phase to influence andimprove the configuration.
AcknowledgementsThe authors would like to thank Thomas Zang and
Jim Batterson for their support and diligent review;HPCCP for the use of their Origin 2000; Bob Weston foraid in running PMARC; Bob Biedron for his invaluablehelp with the CFL3D source code; Alan Carle, adeveloper of ADIFOR and ADJIFOR, for his guidance inimplementing these tools.
Michael Park is supported by a NASA grant toGeorge Washington University and would like to thankhis advisor, Professor Robert Sandusky, for his guidance.
References1Finley, D., “Euler Technology Assessment Program
for Preliminary Aircraft Design Employing SPLITFLOWCode With Cartesian Unstructured Grid Method,” NASACR-4649, Mar. 1995.
2Charlton, E., “Numerical Stability and ControlAnalysis Towards Falling-Leaf Prediction Capabilities ofSplitflow for two Generic High-Performance AircraftModels,” NASA CR-1998-208730, Sept. 1998.
3Bischof, C., Corliss, G., Green, L., Griewank, A.,Haigler, K., and Newman, P., “Automatic Differentiationof Advanced CFD Codes for Multidisciplinary Design,”Journal on Computing Systems in Engineering, Vol.3,No. 6, 1993, pp. 625–637.
4Carle, A., Green, L., Bischof, C., and Newman, P.,“Applications of Automatic Differentiation in CFD,”AIAA Paper 94-2197, June 1994.
5Carle, A., Fagan, M., and Green, L., “PreliminaryResults From the Application of Automated AdjiontCode Generation to CFL3D” AIAA Paper 98-4807, Sept.1998.
6Ashby, D., Dudley, M., Iguchi, S., Browne, L., andKatz J., “Potential Flow Theory and Operation Guide forthe Panel Code PMARC_12,” NASA Ames ResearchCenter, Moffett Field, CA, Dec. 1992.
7Scott, M., Montgomery, R., and Weston, R.,“Subsonic Maneuvering Effectiveness of HighPerformance Aircraft Which Employ Quasi-Static ShapeChange Devices,” SPIE, 1998 International Symposiumon Smart Structures and Materials, paper 3326-24, pp.223–233.
8Gainer and Hoffman, “Summary of TransformationEquations and Equations of Motion Used in Free-Flightand Wind Tunnel Data Reduction and Analysis,” NASA-SP-3070, 1972.

American Institute of Aeronautics and Astronautics9
Table 1 ADIFOR and central-difference derivative comparison
1a Angle of attack derivativesDelta CNα CAα CmαADIFOR 0.035454709062101 -0.003267609090179 -0.0008290791540410.00010 0.035454709131141 -0.003267609093372 -0.0008290791792680.00100 0.035454709061831 -0.003267609089643 -0.0008290791570290.01000 0.035454708332922 -0.003267609023218 -0.0008290791330670.10000 0.035454255577332 -0.003267559873352 -0.0008288953439060.50000 0.035452260331233 -0.003267367165219 -0.0008287098410461.00000 0.035448144567092 -0.003266980803803 -0.0008291664397632.00000 0.035426249591663 -0.003265017618858 -0.0008285742280443.00000 0.035390453908999 -0.003261680510116 -0.0008277838338004.00000 0.035340142420115 -0.003257029240917 -0.0008266032073215.00000 0.035275928055248 -0.003251137916411 -0.000825303188473
1b Angle of sideslip derivativesDelta CSβ Clβ CnβADIFOR -0.000008538661361 -0.000834076090398 -0.0004166331279040.00010 -0.000008538660777 -0.000834076088413 -0.0004166331283620.00100 -0.000008538661417 -0.000834076089846 -0.0004166331277980.01000 -0.000008541627900 -0.000834068593914 -0.0004166325482110.10000 -0.000008540791200 -0.000834067092253 -0.0004166319950800.50000 -0.000008539216973 -0.000834039640050 -0.0004166125307361.00000 -0.000008539749531 -0.000833899327802 -0.0004165479713972.00000 -0.000008532680933 -0.000833404628431 -0.0004162955025443.00000 -0.000008525603110 -0.000832545220898 -0.0004158718274084.00000 -0.000008510866398 -0.000831363321756 -0.0004152817166135.00000 -0.000008493765165 -0.000829844366410 -0.000414523104020
Table 2 Force and moment coefficients at 0 degrees of sideslip.
Angle of Attack CN CA Cm CS Cl Cn2a Simulation database
1.16 0.00649 0.01010 0.00454 0.00100 -0.00008 0.000041.62 0.02551 0.00917 0.00405 0.00096 -0.00003 0.000052.70 0.06726 0.00671 0.00297 0.00084 0.00010 0.000093.71 0.10607 0.00385 0.00205 0.00085 0.00026 0.000084.68 0.14412 0.00051 0.00126 0.00085 0.00042 0.000075.66 0.18022 -0.00316 0.00063 0.00074 0.00053 0.000056.66 0.21742 -0.00750 -0.00002 0.00074 0.00064 0.000067.70 0.25738 -0.01238 -0.00114 0.00039 0.00073 0.000078.74 0.30058 -0.01725 -0.00216 0.00015 0.00074 0.000119.67 0.34156 -0.02053 -0.00289 -0.00062 0.00062 0.00042
2b PMARC values1.16 0.01178 0.00142 0.00132 0.00000 0.00000 0.000001.62 0.02783 0.00054 0.00120 0.00000 0.00000 0.000002.70 0.06566 -0.00189 0.00077 0.00000 0.00000 0.000003.71 0.10128 -0.00465 0.00017 0.00000 0.00000 0.000004.68 0.13564 -0.00773 -0.00060 0.00000 0.00000 0.000005.66 0.17047 -0.01128 -0.00156 0.00000 0.00000 0.000006.66 0.20610 -0.01534 -0.00273 0.00000 0.00000 0.000007.70 0.24319 -0.02002 -0.00414 0.00000 0.00000 0.000008.74 0.28026 -0.02518 -0.00576 0.00000 0.00000 0.000009.67 0.31337 -0.03019 -0.00737 0.00000 0.00000 0.00000

American Institute of Aeronautics and Astronautics10
Table 3 Force and moment coefficients at 2 degrees of sideslip
Angle of Attack CN CA Cm CS Cl Cn3a Simulation database
0.00 -0.00058 -0.00056 -0.00003 -0.00190 0.00071 -0.000292.50 -0.00047 0.00033 -0.00003 -0.00159 -0.00050 -0.000485.00 -0.00037 0.00121 -0.00004 -0.00127 -0.00172 -0.000677.50 0.00024 0.00045 -0.00011 -0.00008 -0.00231 -0.00130
3b PMARC Values0.00 0.00004 0.00001 0.00000 -0.00087 0.00033 -0.000602.50 -0.00006 0.00001 0.00000 -0.00038 -0.00081 -0.000735.00 -0.00017 0.00002 0.00000 0.00010 -0.00194 -0.000867.50 -0.00028 0.00003 0.00000 0.00058 -0.00308 -0.00099
Table 4 Force and moment coefficients -2 degrees of sideslip
Angle of Attack CN CA Cm CS Cl Cn4a Simulation database
0.00 -0.00010 -0.00002 0.00005 0.00201 -0.00062 0.000312.50 0.00076 -0.00019 -0.00006 0.00160 0.00055 0.000495.00 0.00161 -0.00035 -0.00017 0.00121 0.00172 0.000677.50 0.00516 0.00021 -0.00070 -0.00059 0.00202 0.00135
4b PMARC Values0.00 0.00004 0.00001 0.00000 0.00087 -0.00033 0.000602.50 -0.00006 0.00001 0.00000 0.00038 0.00081 0.000735.00 -0.00017 0.00002 0.00000 -0.00010 0.00194 0.000867.50 -0.00028 0.00003 0.00000 -0.00058 0.00308 0.00099
Table 5 PMARC force and moment coefficients with drag addition
Angle of Attack CN CA Cm CS Cl Cn5a 0 degrees of sideslip
1.16 0.01196 0.01010 0.00404 0.00000 0.00000 0.000001.62 0.02807 0.00922 0.00392 0.00000 0.00000 0.000002.70 0.06607 0.00678 0.00349 0.00000 0.00000 0.000003.71 0.10184 0.00402 0.00288 0.00000 0.00000 0.000004.68 0.13635 0.00092 0.00211 0.00000 0.00000 0.000005.66 0.17133 -0.00264 0.00114 0.00000 0.00000 0.000006.66 0.20711 -0.00671 -0.00003 0.00000 0.00000 0.000007.70 0.24435 -0.01142 -0.00145 0.00000 0.00000 0.000008.74 0.28158 -0.01660 -0.00307 0.00000 0.00000 0.000009.67 0.31483 -0.02163 -0.00469 0.00000 0.00000 0.00000
5b 2 degrees of sideslip0.00 0.00004 0.00001 0.00000 -0.00117 0.00026 -0.000602.50 -0.00006 0.00001 0.00000 -0.00069 -0.00088 -0.000735.00 -0.00017 0.00002 0.00000 -0.00020 -0.00202 -0.000867.50 -0.00028 0.00003 0.00000 0.00028 -0.00315 -0.00099
5c -2 degrees of sideslip0.00 0.00004 0.00001 0.00000 0.00117 -0.00026 0.000602.50 -0.00006 0.00001 0.00000 0.00069 0.00088 0.000735.00 -0.00017 0.00002 0.00000 0.00020 0.00202 0.000867.50 -0.00028 0.00003 0.00000 -0.00028 0.00315 0.00099

American Institute of Aeronautics and Astronautics11
Fig. 1 LMTAS-ICE.
Wing Characteristics
Area ... 75.12 m2 (808.6 ft2)Span ... 11.43 m (37.5 ft)Aspect Ratio ... 1.74Leading Edge Sweep ... 65 deg
Relative Wind V
CA
CSCm
Cn
CN
CIα
β

10−4
10−2
100
0.035
0.0352
0.0354
0.0356
0.0358
0.036
CN
α
∆ angle of attack, dega) Normal force derivative
Central difference
ADIFOR
10−4
10−2
100
−3.28
−3.27
−3.26
−3.25
x 10−3
CA
α
∆ angle of attack, degb) Axial force derivative
Central difference
ADIFOR
10−4
10−2
100
−8.34
−8.32
−8.3
−8.28
−8.26
−8.24x 10
−4
Cm
α
∆ angle of attack, degc) Pitching moment derivative
Central difference
ADIFOR
10−4
10−2
100
−8.58
−8.56
−8.54
−8.52
−8.5
x 10−6
CS
β
∆ angle of sideslip, degd) Side force derivative
Central difference
ADIFOR
10−4
10−2
100
−8.4
−8.38
−8.36
−8.34
−8.32
−8.3
−8.28x 10
−4
Cl β
∆ angle of sideslip, dege) Rolling moment derivative
Central difference ADIFOR
10−4
10−2
100
−4.19
−4.18
−4.17
−4.16
−4.15
−4.14
x 10−4
Cn β
∆ angle of sideslip, degf) Yawing moment derivative
Central difference
ADIFOR
Fig. 2 Comparison of central differences to ADIFOR−generated PMARC derivatives.12
American Institute of Aeronautics and Astronautics

0 2 4 6 8 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35Sim. data, β = 0PMARC, β = 0CFL3D, β = 0
CN
Angle of attack, dega) Normal force coefficients
0 2 4 6 8 10−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
∆CD0 estimate
Sim. data, β = 0PMARC, β = 0CFL3D, β = 0
CA
Angle of attack, degb) Axial force coefficients
0 2 4 6 8 10−8
−6
−4
−2
0
2
4
6x 10
−3
Sim. data, β = 0PMARC, β = 0CFL3D, β = 0
Cm
Angle of attack, degc) Pitching moment coefficients
0 2 4 6 8 10−3
−2
−1
0
1
2
3x 10
−3
Sim. data, β = 2PMARC, β = 2Wind tunnel, β = −2PMARC, β = −2
CS
Angle of attack, degd) Side force coefficients
0 2 4 6 8 10−4
−2
0
2
4x 10
−3
Sim. data, β = 2PMARC, β = 2Sim. data, β = −2PMARC, β = −2
Cl
Angle of attack, dege) Rolling moment coefficients
0 2 4 6 8 10−2
−1
0
1
2x 10
−3
Sim. data, β = 2PMARC, β = 2Sim. data, β = −2PMARC, β = −2
Cn
Angle of attack, degf) Yawing moment coefficients
Fig. 3 Comparison of CFD forces and moments to simulation database.13
American Institute of Aeronautics and Astronautics

0 2 4 6 8 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35Sim. data, β = 0PMARC, β = 0CFL3D, β = 0
CN
Angle of attack, dega) Normal force coefficients
0 2 4 6 8 10−0.03
−0.02
−0.01
0
0.01
0.02
Sim. data, β = 0PMARC, β = 0CFL3D, β = 0
CA
Angle of attack, degb) Axial force coefficients
0 2 4 6 8 10−6
−4
−2
0
2
4
6x 10
−3
Sim. data, β = 0PMARC, β = 0CFL3D, β = 0
Cm
Angle of attack, degc) Pitching moment coefficients
0 2 4 6 8 10−3
−2
−1
0
1
2
3x 10
−3
Sim. data, β = 2PMARC, β = 2Wind tunnel, β = −2PMARC, β = −2
CS
Angle of attack, degd) Side force coefficients
0 2 4 6 8 10−4
−2
0
2
4x 10
−3
Sim. data, β = 2PMARC, β = 2Sim. data, β = −2PMARC, β = −2
Cl
Angle of attack, dege) Rolling moment coefficients
0 2 4 6 8 10−2
−1
0
1
2x 10
−3
Sim. data, β = 2PMARC, β = 2Sim. data, β = −2PMARC, β = −2
Cn
Angle of attack, degf) Yawing moment coefficients
Fig. 4 Comparison of CFD forces and moments with drag addition to simulation database.14
American Institute of Aeronautics and Astronautics

0 2 4 6 8 100.034
0.036
0.038
0.04
0.042
0.044
0.046 CD−sim ADIFOR−PMARC CD−CFL3D
CN
α
Angle of attack, dega) Derivative of normal force coefficients
0 2 4 6 8 10−5.5
−5
−4.5
−4
−3.5
−3
−2.5
−2x 10
−3
CD−sim ADIFOR−PMARC CD−CFL3D
CA
α
Angle of attack, degb) Derivative of axial force coefficients
0 2 4 6 8 10−2.5
−2
−1.5
−1
−0.5
0x 10
−3
CD−sim ADIFOR−PMARC CD−CFL3D
Cm
α
Angle of attack, degc) Derivative of pitching moment coefficients
0 2 4 6 8 10−1
−0.5
0
0.5
1
1.5x 10
−3
fine−grid
med−grid
CD−sim ADIFOR−PMARC ADIFOR−CFL3D
CS
β
Angle of attack, degd) Derivative of side force coefficients
0 2 4 6 8 10−20
−15
−10
−5
0
5x 10
−4
fine−grid
med−grid
CD−sim ADIFOR−PMARC ADIFOR−CFL3D
Cl β
Angle of attack, dege) Derivative of rolling moment coefficients
0 2 4 6 8 10−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0x 10
−3
fine−grid
med−grid
CD−sim ADIFOR−PMARC ADIFOR−CFL3D
Cn β
Angle of attack, degf) Derivative of yawing moment coefficients
Fig. 5 Comparison of central differences to ADIFOR−generated PMARC derivatives.15
American Institute of Aeronautics and Astronautics

−6
−4
−2
0
2
4
6
x 10−5
0 10 20 30 40 50
−10
0
10
∂Cl/∂xn
Chordwise axis, fta) Roll sensitivity of upper surface
Spa
nwis
e ax
is, f
t
−6
−4
−2
0
2
4
6
x 10−5
0 10 20 30 40 50
−10
0
10
∂Cl/∂xn
Chordwise axis, ftd) Roll sensitivity of lower surface
Spa
nwis
e ax
is, f
t
−2
−1
0
1
2x 10
−4
0 10 20 30 40 50
−10
0
10
∂Cm/∂xn
Chordwise axis, ftb) Pitch sensitivity of upper surface
Spa
nwis
e ax
is, f
t
−2
−1
0
1
2x 10
−4
0 10 20 30 40 50
−10
0
10
∂Cm/∂xn
Chordwise axis, fte) Pitch sensitivity of lower surface
Spa
nwis
e ax
is, f
t
−4
−2
0
2
4x 10
−5
0 10 20 30 40 50
−10
0
10
∂Cn/∂xn
Chordwise axis, ftc) Yaw sensitivity of upper surface
Spa
nwis
e ax
is, f
t
−4
−2
0
2
4x 10
−5
0 10 20 30 40 50
−10
0
10
∂Cn/∂xn
Chordwise axis, ftf) Yaw sensitivity of lower surface
Spa
nwis
e ax
is, f
t
Fig. 6 ADJIFOR−generated control effectiveness contours.16
American Institute of Aeronautics and Astronautics

0 0.1 0.2 0.3 0.4 0.50.5
1
1.5
2
2.5
3
Cl
Cm
Cn
Normal displacement, ft
Fin
ite d
iffer
ence
/ ad
join
t est
imat
e
b) Variation in bump height: pt. 17,2
0 5 10 15 20 25
0
5
10
15
20
25
30
35
40
45 (1,17)
(41,17)
(41,1)
(17,13)
(34,2)
(17,5)
(20,2)
(17,2)
(1,1)
Spanwise axis, ft
Cho
rdw
ise
axis
, ft
a) ICE half−span grid
17 17,18 17,18,19 17,18,19,20 1
2
3
4
5
6
7
8Cl
Cm
Cn
Spanwise locations
Fin
ite d
iffer
ence
/ ad
join
t est
imat
e
c) Deployment of spanwise adjacent bumps
2 2,3 2,3,4 2,3,4,51
2
3
4
5
6
7
8
9
Cl
Cm
Cn
Chordwise locations
Fin
ite d
iffer
ence
/ ad
join
t est
imat
e
d) Deployment of chordwise adjacent bumpsFig. 7 Comparison of ADJIFOR−generated PMARC control estimates with PMARC finite differences.
17American Institute of Aeronautics and Astronautics

2 3 5 7 9 11 13−2
0
2
4
6x 10
−5
FD ∆Cl
Est ∆Cl
Chordwise location
Cha
nge
in r
ollin
g m
omen
t coe
ffici
ent
a) Chordwise single bumps
2 3 5 7 9 11 13−10
−8
−6
−4
−2
0
2
4x 10
−5
FD ∆Cm
Est ∆Cm
Chordwise location
Cha
nge
in p
itchi
ng m
omen
t coe
ffici
ent
b) Chordwise single bumps
2 3 5 7 9 11 13−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
−5
FD ∆Cn
Est ∆Cn
Chordwise location
Cha
nge
in y
awin
g m
omen
t coe
ffici
ent
c) Chordwise single bumps
10 1718 24 26 34−2
0
2
4
6
8
10x 10
−6
FD ∆Cl Est ∆Cl
Spanwise location
Cha
nge
in r
ollin
g m
omen
t coe
ffici
ent
d) Spanwise single bumps
10 1718 24 26 340
2
4
6x 10
−5
FD ∆Cm
Est ∆Cm
Spanwise location
Cha
nge
in p
itchi
ng m
omen
t coe
ffici
ent
e) Spanwise single bumps
10 1718 24 26 34−2
−1.5
−1
−0.5
0
0.5
1x 10
−5
FD ∆Cn
Est ∆Cn
Spanwise location
Cha
nge
in y
awin
g m
omen
t coe
ffici
ent
f) Spanwise single bumps
Fig. 8 Comparison of ADJIFOR−generated PMARC estimates with PMARC finite differences.18
American Institute of Aeronautics and Astronautics








![, Allen, C., & Rendall, T. (2019). Efficient Aero-Structural Wing AIAA Scitech … · In AIAA Scitech 2019 Forum [AIAA 2019-1701] (AIAA Scitech 2019 Forum). American Institute of](https://img.dokumen.tips/doc/110x75/6089b44b26d0b4646a6cbe59/-allen-c-rendall-t-2019-efficient-aero-structural-wing-aiaa-scitech.jpg)