Embed Size (px)
DESCRIPTION
fddf
Citation preview
2-
CAP.2. PORNIREA, FRÂNAREA ŞI MODIFICAREA VITEZEI MOTOARELOR
ELECTRICE
2.1. PORNIREA MOTOARELOR ELECTRICE
2.1.1. PORNIREA MOTOARELOR DE C.C.
2.1.1.1. Generalităţi privind pornirea motoarelor de c.c.
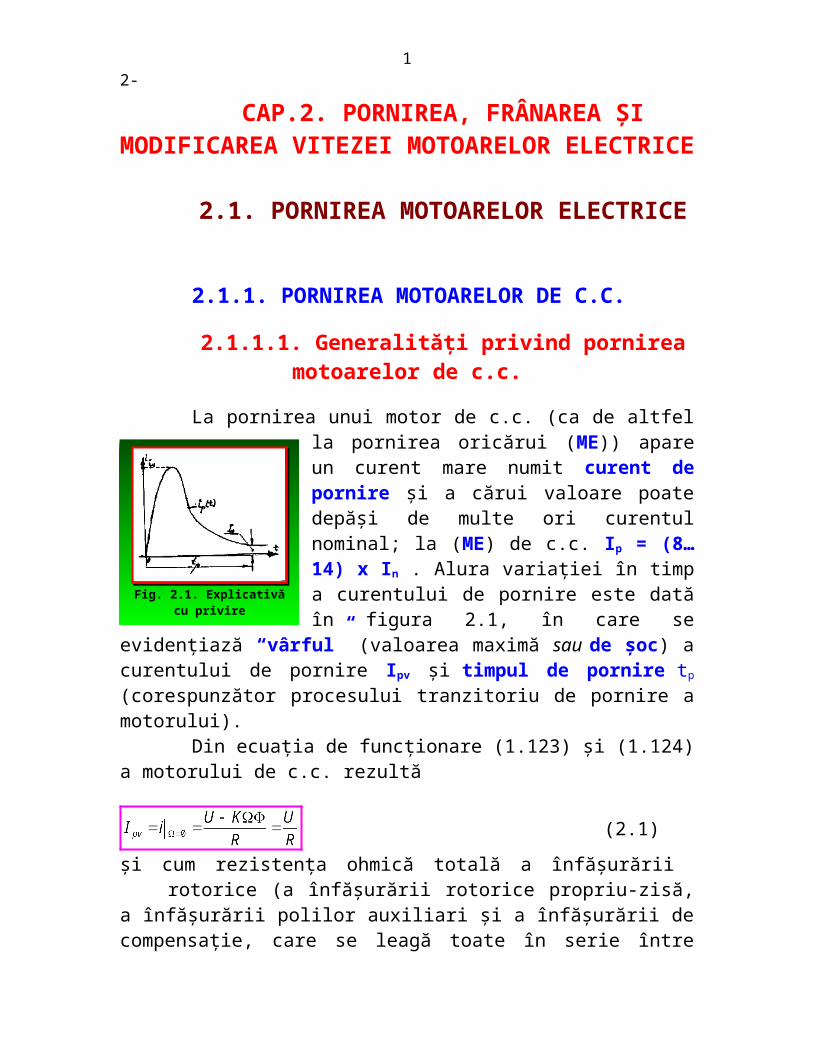
La pornirea unui motor de c.c. (ca de altfel la pornirea oricărui (ME)) apare un curent mare numit curent de pornire şi a cărui valoare poate depăşi de multe ori curentul nominal; la (ME) de c.c. Ip = (8…14) x In . Alura variaţiei în timp a curentului de pornire este dată în figura 2.1, în care se evidenţiază “vârful” (valoarea maximă sau de şoc) a curentului de pornire Ipv şi timpul de pornire tp
(corespunzător procesului tranzitoriu de pornire a motorului).
Din ecuaţia de funcţionare (1.123) şi (1.124) a motorului de c.c. rezultă
(2.1)
şi cum rezistenţa ohmică totală a înfăşurării rotorice (a înfăşurării rotorice propriu-zisă, a înfăşurării polilor auxiliari şi a înfăşurării de compensaţie, care se leagă toate în serie între ele) R are valori mici (mai ales în cazul maşinilor de putere mare), rezultă că vârful curentului de pornire Ipv poate atinge valoare mare în timpul pornirii. Tot din (2.1) se poate remarca că pe măsură ce motorul “prinde turaţie”, valoarea tensiunii contraelectromotoare induse în înfăşurarea rotorică creşte (E = kΩΦ) şi valoarea numărătorului expresiei din (2.1) scade, ceea ce duce la micşorarea curentului de pornire până la In (dacă sarcina la arborele motorului este cea nominală). Timpul de pornire tp depinde de inerţiile mecanică şi electromagnetică ale (SAE) adică de constantele de timp Tm şi T. Timpul tp poate fi de ordinul a câteva secunde, dar la acţionări de puteri mari el poate atinge ordinul a zecilor de secunde.
1
Fig. 2.1. Explicativă cu privirela şocul curentului de pornire.

2-
Faptul cert este acela că şocul curentului de pornire poate produce mai multe neajunsuri chiar motorului care porneşte, dar şi altor receptoare legate pe aceeaşi reţea de alimentare; neajunsurile principale ce pot apare sunt:
înrăutăţirea comutaţiei motorului până la producerea unui “cerc de foc” la colector, care de regulă duce la scoaterea maşinii din uz;
supraîncălzirea înfăşurării rotorice a motorului printr-un efect Joule pronunţat (ceea ce este deosebit de important mai ales în cazul pornirilor dese);
eforturi electrodinamice deosebite ce apar datorită curentului foarte mare (mai ales la capetele bobinelor înfăşurării rotorice);
sistemul de protecţie al acţionării trebuie desensibilizat la nivelul curentului Ipv pentru că altfel nu se poate realiza pornirea, iar pe de altă parte o desensibilizare pronunţată a protecţiei conduce practic la o lipsă de protecţie a motorului (la suprasarcină, scurtcircuit);
pe reţeaua de alimentare se produc căderi de tensiune importante (datorită şocului curentului de pornire), care pot deranja funcţionarea normală a altor receptoare.
Toate aceste aspecte negative conduc la ideea necesităţii micşorării curentului de pornire la un nivel acceptabil din toate punctele de vedere. Din practică s-a constatat că vârful curentului de pornire trebuie redus la Iv = Imax
= (1,8…2,2) x In, nivel ce limitează la o măsură acceptabilă efectele negative prezentate anterior, dar în acelaşi timp asigură o accelerare corespunzătoare la pornirea (SAE), deci un tp nu prea mare (important mai ales în cazul pornirilor dese).
Din (2.1) rezultă că limitarea Ipv se poate realiza în două moduri:prin micşorarea tensiunii de alimentare U în momentul cuplării
motorului la reţea şi apoi creşterea progresivă a acestuia; aceasta presupune că motorul trebuie să posede propria sa sursă de c.c. cu tensiunea reglabilă în limite largi.
prin înserierea unor rezistenţe exterioare în circuitul rotoric al motorului cu ajutorul unui reostat corespunzător.
În practică se foloseşte cel mai adesea cea de-a doua variantă, folosind aşa-numitul reostat de pornire în trepte al motorului, dar odată cu dezvoltarea tehnicii ce utilizează dispozitive cu semiconductoare este folosită tot mai des şi prima variantă şi mai ales dacă dispozitivul cu semiconductoare este folosit în continuare şi pentru reglajul vitezei motorului (prin modificarea tensiunii de alimentare). In acest caz dispozitivul cu semiconductoare este un redresor comandabil alimentat de la
2

2-
o reţea de c.a. (de obicei trifazată) şi a cărui tensiune de ieşire de c.c. este reglabilă în limite foarte largi (practic între zero şi Un).
2.1.1.2. Determinarea rezistenţelor de pornire la (ME) de c.c. cu excitaţia derivaţie
(separată).
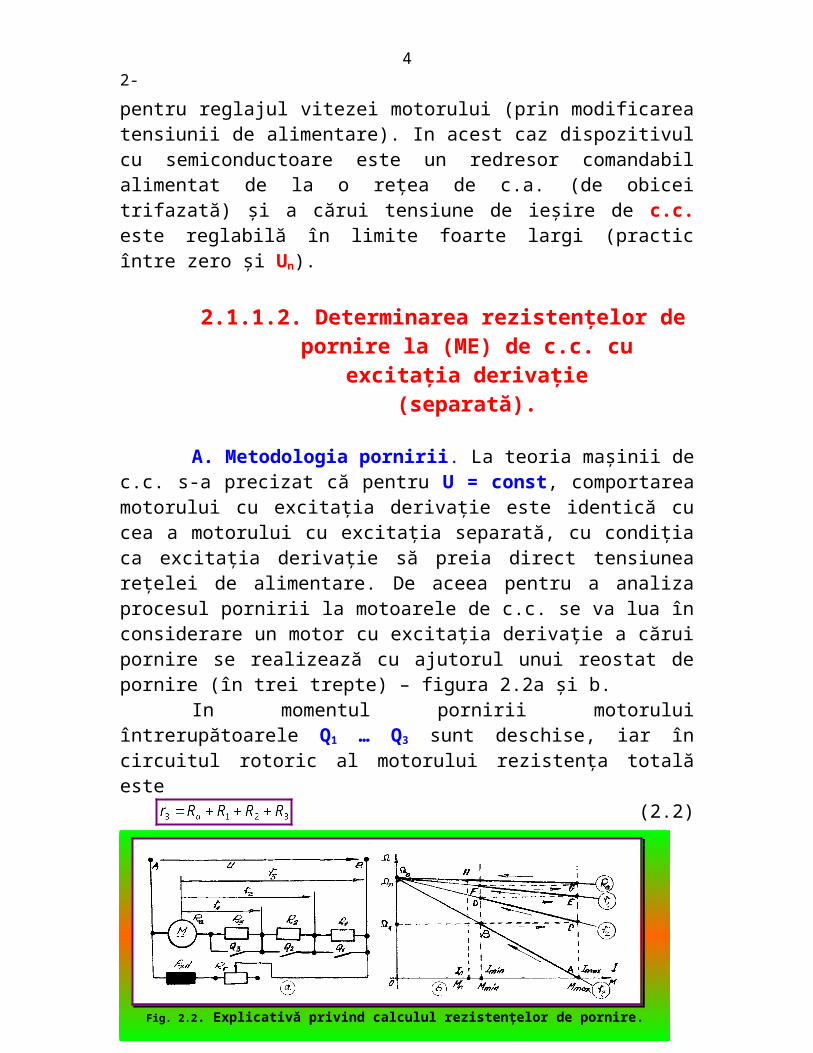
A. Metodologia pornirii. La teoria maşinii de c.c. s-a precizat că pentru U = const, comportarea motorului cu excitaţia derivaţie este identică cu cea a motorului cu excitaţia separată, cu condiţia ca excitaţia derivaţie să preia direct tensiunea reţelei de alimentare. De aceea pentru a analiza procesul pornirii la motoarele de c.c. se va lua în considerare un motor cu excitaţia derivaţie a cărui pornire se realizează cu ajutorul unui reostat de pornire (în trei trepte) – figura 2.2a şi b.
In momentul pornirii motorului întrerupătoarele Q1 … Q3 sunt deschise, iar în circuitul rotoric al motorului rezistenţa totală este
(2.2)
şi în acest fel motorul va porni pe caracteristica mecanică artificială reostatică r3 – figura 2.2 b – din punctul A curentul de pornire fiind în acest caz mult mai redus
, (2.3)
De fapt, pentru calcularea exactă a curentului Imax, respectiv a rezistenţei totale r3 necesare în momentul iniţial al pornirii se procedează invers în raport cu cele prezentate până acum: plecând de la ecuaţia fundamentală a mişcării
(2.4)
3
Fig. 2.2. Explicativă privind calculul rezistenţelor de pornire.
2-
se admite o anumită valoare pentru acceleraţia dΩ / dt a (SAE) în perioada pornirii şi în acest fel se poate calcula momentul dinamic al sistemului în perioada pornirii Md = J dΩ / dt (J este momentul axial de inerţie total); dacă la Md se adaugă valoarea lui Mr (considerat cunoscuta), atunci cu ecuaţia (2.4) se determină valoarea momentului cuplului electromagnetic Mmax pe care trebuie să-l producă motorul la pornirea sistemului de acţionare.
În continuare, din expresia generală a cuplului electromagnetic rezultă:
(2.5)
(în care Φ, fluxul de excitaţie al motorului se consideră constant), care urmează să fie verificat dacă se încadrează în limitele (1,8 … 2,2)xIn
stabilite de practica utilizării acţionărilor electrice. Având valoarea lui Imax
(denumit şi curent de vârf Iv ) cu relaţia (2.3) se poate calcula rezistenţa necesară r3.
Aşadar, în momentul pornirii ne vom situa pe caracteristica reostatică r3, figura 2.2 b, în punctul A corespunzător lui Imax (Mmax) şi vitezei unghiulare nule (Ω = 0). Funcţionând pe această caracteristică, viteza motorului creşte până la Ω1, adică ne situăm la un moment dat în punctul B de coordonate (Imin , Ω1) unde
. (2.6)
Valoarea curentului Imin (corespunzător lui Mmin) se stabileşte, de asemenea, ţinând seama de practica acţionărilor electrice, între limite
Imin = (1,05 … 1,2) x In (2.7)curentul Imin se mai numeşte şi curent de comutare (Ic).
În momentul în care curentul din circuitul rotoric al motorului atinge valoarea Imin, se dă comanda pentru închiderea contactului Q1, figura 2.2a, al contactorului de accelerare Q1 (nefigurat în schema dată), care scurtcircuitează treapta de rezistenţă R1. În acest fel, motorul trece să funcţioneze pe caracteristica mecanică artificială r2, figura 2.2b; cu această ocazie se produce un nou şoc de curent şi curentul rotoric al motorului ajunge din nou la valoarea Imax = Iv, adică valoarea treptei de rezistenţă R1 ce se scurtcircuitează trebuie astfel aleasă încât la viteza Ω1 (la care se produce scurtcircuitarea treptei), valoarea rezistenţei ce mai rămâne în circuitul rotoric să asigure Imax, respectiv :
4

2-
(2.8)Cu această ocazie,
trebuie remarcat un element esenţial specific tipului acesta al procesului de pornire “în trepte” al motorului: scurtcircuitarea treptei de rezistenţă R1, adică trecerea, în funcţionarea motorului, de pe caracteristica artificială r3 pe caracteristica artificială r2, se realizează de regulă cu un aparataj electric adecvat, care execută această operaţiune într-un timp foarte scurt (fracţiuni de secundă),
astfel încât se poate considera că această “comutare” de la o valoare la alta a rezistenţei din rotor (de la Imin = Ic, la Imax = Iv) se face practic instantaneu, deci la o viteză unghiulară constantă a maşinii. Deci din punctul B (caracteristica r3) se ajunge în punctul C (caracteristica r2), figura 2.2 b, iar dreapta BC conform cu cele prezentate anterior este paralelă cu axa absciselor.
Funcţionând pe caracteristica r2, figura 2.2 b, viteza unghiulară creşte până la Ω2 când curentul rotoric ajunge din nou la valoarea Imin = Ic. În acest moment se dă comanda pentru închiderea contactului Q2 a contactorului de accelerare respectiv, care scurtcircuitează treapta de rezistenţă R2, elementele explicative având aceeaşi ordine ca şi pentru prima treaptă.
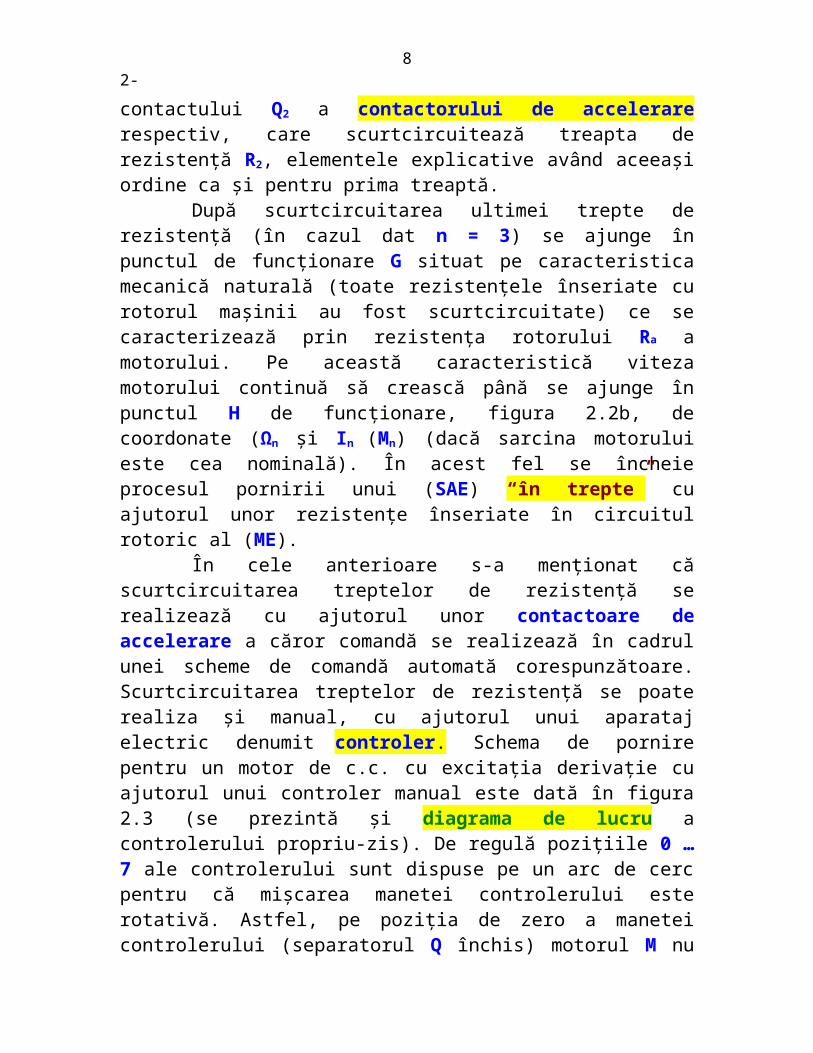
După scurtcircuitarea ultimei trepte de rezistenţă (în cazul dat n = 3) se ajunge în punctul de funcţionare G situat pe caracteristica mecanică naturală (toate rezistenţele înseriate cu rotorul maşinii au fost scurtcircuitate) ce se caracterizează prin rezistenţa rotorului Ra a motorului. Pe această caracteristică viteza motorului continuă să crească până se ajunge în punctul H de funcţionare, figura 2.2b, de coordonate (Ωn şi In (Mn) (dacă sarcina motorului este cea nominală). În acest fel se încheie procesul pornirii unui (SAE) “în trepte” cu ajutorul unor rezistenţe înseriate în circuitul rotoric al (ME).
În cele anterioare s-a menţionat că scurtcircuitarea treptelor de rezistenţă se realizează cu ajutorul unor contactoare de accelerare a căror
5
Fig. 2.3. Schema de principiu pentru scurtcircuitareatreptelor de rezistenţă cu un controler şi diagrama de
funcţionare a acestuia.

2-
comandă se realizează în cadrul unei scheme de comandă automată corespunzătoare. Scurtcircuitarea treptelor de rezistenţă se poate realiza şi manual, cu ajutorul unui aparataj electric denumit controler. Schema de pornire pentru un motor de c.c. cu excitaţia derivaţie cu ajutorul unui controler manual este dată în figura 2.3 (se prezintă şi diagrama de lucru a controlerului propriu-zis). De regulă poziţiile 0 … 7 ale controlerului sunt dispuse pe un arc de cerc pentru că mişcarea manetei controlerului este rotativă. Astfel, pe poziţia de zero a manetei controlerului (separatorul Q închis) motorul M nu porneşte pentru că circuitul său rotoric este întrerupt între punctele A şi B. Cu maneta pe poziţia 1, barele orizontale ale controlerului scurtcircuitează punctele A şi B din schema motorului M: circuitul de excitaţie se conectează la sursă, iar în circuitul rotoric al motorului apar înseriate cele 6 trepte de rezistenţă, motorul porneşte (începe accelerarea lui). Cu maneta pe poziţia 2 controlerul scurtcircuitează prima treaptă de rezistenţă etc.
Schema prezentată este doar o schemă “de principiu” şi de altfel ea include următoarele imperfecţiuni:
există posibilitatea ca controlerul să nu fie pe poziţia de zero (adicǎ, să fie „uitat” pe o poziţie oarecare) astfel încât la închiderea lui Q motorul să pornească fără ca toată rezistenţa reostatului să fie înseriată în circuitul său rotoric;
nu se poate realiza inversarea sensului de rotire la motor prin manevrarea controlerului;
trecerea de pe o treaptă pe alta poate fi prea rapidă; unele dintre aceste imperfecţiuni se remediază prin diagrame de lucru mai speciale ale controlerului sau prin scheme de comandă automate care vor fi prezentate într-un capitol ulterior B. Calculul rezistenţelor de pornire. In continuare se pun însă următoarele probleme:
determinarea numărului treptelor de rezistenţă ale reostatului de pornire;
determinarea valorilor treptelor de rezistenţă ale reostatului de pornire. Problemele acestea se rezolvă de regulă prin: a) metode analitice; b) metode grafo-analitice; c) metode grafice.
În cele ce urmează se va prezenta metoda analitică şi ea se pretează în cazul în care caracteristicile mecanice ale motorului sunt liniare sau la pornire se lucrează pe porţiunea liniară a caracteristicii mecanice.
Aşadar, să admitem că se face trecerea de pe caracteristica mecanică inferioară de indice k (punctul D) pe o caracteristică mecanică
6

2-
imediat superioară de indice (k-1) (punctul E). Ecuaţia de funcţionare a motorului scrisă pentru cele două caracteristici este: pentru caracteristica rk, figura 2.2b, punctul D : (2.9) pentru caracteristica de indice (k-1), dispusă imediat deasupra caracteristicii k, adică punctul E :
(2.10)Scăzând (2.9) din (2.10), rezultă relaţia generală
,respectiv se poate nota un şir de egalităţi pentru n trepte de rezistenţă
; ; … ; (2.11)
Dacă se face notaţia
(2.12)
atunci şirul de egalităţi din (2.11) se poate nota sub forma:
, (2.13)
respectiv; ; ; … ; (2.14)
Prin logaritmarea ultimei egalităţi din (2.14) rezultă :
, (2.15)
în care s-a ţinut seama de relaţia (2.3) (exprimată pentru cazul general a n trepte de rezistenţă) şi de relaţia (2.12). Relaţia (2.15) ne permite să calculăm numărul n al treptelor reostatului de pornire, dar este posibil ca numărul n să nu fie întreg (ceea ce nu se poate admite din punct de vedere fizic) şi atunci se ajustează valorile curentului Imax şi/sau Imin în limitele prescrise, astfel încât n să devină un număr întreg (imediat superior numărului fracţionar obţinut iniţial).
Odată obţinută condiţia n I, cu ajutorul lui se poate nota relaţia generală din (2.14) sub forma :
(2.16)Dar din schema figurii 2.2 a se vede că : iar dacă se ţine seama de (2.16), atunci relaţia precedentă devine :
(2.17)
7
2-
Aceasta este expresia generală cu ajutorul căreia se pot determina valorile treptelor de rezistenţe (k=1,2, … ,n) pentru reostatul de pornire şi în care este condiţionat de faptul ca n dat de (2.15) să fie un număr întreg.
2.1.1.3. Determinarea rezistenţelor de pornire la (ME) de c.c. cu excitaţia serie şi compund.
La pornirea motoarelor de c.c. ca excitaţia serie şi compund apar, în principiu, aceleaşi aspecte ca şi la motoarele cu excitaţia derivaţie sau separată şi desigur se utilizează aceleaşi metode de pornire, doar că apar unele aspecte specifice tipului de motor respectiv.
A. Motorul de c.c. cu excitaţie serie.Astfel, referitor la motorul de c.c. cu excitaţia serie nu se cunoaşte
o relaţie exactă dintre fluxul excitaţie al motorului şi curentul său de sarcină (la acest tip de motor , vezi figura 1.58) având în vedere neliniaritatea fenomenului saturaţiei magnetice a fierului din circuitul principal magnetic al motorului. De aceea nu se poate folosi o metodă analitică pentru calculul rezistenţelor de pornire (practic se obţin rezultate atât de imprecise încât ele nu se pot folosi) şi se aplică o metodă grafică, care implică cunoaşterea curbelor caracteristicilor mecanice naturală şi a unor caracteristici artificiale reostatice.
Ca şi în cazul motorului de c.c. cu excitaţia derivaţie, alegând o acceleraţie d Ω/dt pentru (SAE) dat şi luând în considerare momentul static rezistent Mr, se determină valoarea maximă (Mmax), respectiv minimă (Mmin) pentru momentul cuplului electromagnetic M al motorului, iar apoi din graficul M=f(I) pentru motorul respectiv se stabilesc valorile Imax şi Imin între care se va modifica curentul motorului în perioada pornirii sale ‚în trepte. Din (1.148) rezultă că pentru un curent de sarcină constant se poate nota :
, (2.18)
(se admite, de asemenea, U=const). Relaţia (2.18) arată că în condiţiile date, viteza unghiulară a motorului de c.c. cu excitaţia_serie, depinde liniar de rezistenţa R din circuitul rotoric al motorului. Tocmai pe acest fapt se va baza metoda grafică pentru determinarea rezistenţelor de pornire la acest tip de motor. În primul rând în sistemul de coordonate (ΩOM) se trasează caracteristica mecanică naturală N - figura 2.4 - şi se fixează valorile curenţilor Imax şi Imin. Astfel, pentru viteza nulă a motorului (Ω=0) vom avea rezistenţele U/Imax şi U/Imin ,care se precizează într-un sistem de coordonate (ΩOR) (în figura 2.4 apare ca şi cum ar fi cadranul II al sistemului (ΩOM),
8

2-
deşi ele apar „lipite” numai pentru comoditatea construcţiei grafice). Pentru rezistenţa rotorică totală a motorului R, corespunzător curenţilor Imax, Imin şi c.m.n (N) corespund vitezele unghiulare Ω',Ω". Deci dreapta Ω=f(R) de tip (2.18) corespunzătoare curentului Imax se trasează prin punctul e de coordonate (R, Ω') şi punctul a de coordonate (U/ Imax , 0), iar dreapta Ω=f(R1) corespunzătoare curentului Imin se trasează prin punctul f de coordonate (R, Ω") şi punctul h de coordonate (U/Imin , 0).
(ME) porneşte din punctul a cu un curent egal cu Imax şi viteza Ω = 0, respectiv din punctul A al caracteristicii mecanice artificiale (1). Viteza sa unghiulară creşte şi pentru că rezistenţa rotorică în toată această perioadă rămâne constantă, rezultă că punctul de funcţionare parcurge dreapta ab
(paralelă cu ordo-nata Ω pentru că R=const), iar pe caracteristica (1) străbate porţiunea AB. În acest caz curentul de sarcină scade la valoarea Imin, când se produce scurtcircuitarea (co-mutarea) primei trepte de rezistenţă. Valoarea acestei trepte se alege astfel încât motorul, tre-
când pe caracteristica artificială (2), şocul curentului să fie egal cu Imax. Trecerea de pe c.m.a. (1), pe c.m.a. (2) făcându-se practic instantaneu, se consideră că nu avem o variaţie de viteză şi deci dreapta bc, respectiv BC se trasează paralel cu axa absciselor. Segmentul bc, măsurat la scara rezistenţelor, din sistemul de coordonate (ΩOR) nu reprezintă altceva decât valoarea primei trepte de rezistenţă R1 scurtcircuitate. După scurtcircuitarea ultimei trepte de rezistenţă graficul caracteristicilor mecanice trebuie să se închidă în punctul E de abscisă Imax, respectiv graficul rezistenţelor trebuie să se închidă în punctul e de abscisă R. Dacă aceste închideri nu se realizează, atunci trebuie ajustată corespunzător valoarea lui Imax şi/sau Imin
(în limitele cunoscute). În final, motorul situându-se pe c.m.n. (N), viteza sa unghiulară va creşte până la Ωn (în cazul sarcinii nominale) punctul de funcţionare stabilindu-se în G.(g). –
B. - Motorul de c.c. cu excitaţie compund.
9
Fig. 2.4 Explicativǎ privind determinarea rezistenţelor de pornire la motorul de c.c. cu excitaţia serie.
2-
În ceea ce priveşte pornirea motorului de c.c. cu excitaţia compund este necesar să se reţină faptul că circuitul său magnetic funcţionează în regim saturat pentru că Ip >>In în perioada procesului de pornire. De aceea contribuţia înfăşurării de excitaţie serie, în perioada pornirii, la formarea fluxului de excitaţie din maşină, rămâne în general nesemnificativă, iar de aici se poate trage concluzia că în perioada pornirii, motorul cu excitaţia compund se comportă ca un motor cu excitaţia derivaţie şi deci dimen-sionarea reostatului de pornire în trepte se poate face ca pentru un motor de acest tip.
xx x
C. - ObservaţieÎn privinţa exploatării acţionărilor electrice cu pornirea în trepte s-a
constatat că, mai ales în momentul primului şoc de curent, în organele de transmisie (ca şi în celelalte elemente ale schemei cinematice) se produc eforturi dinamice importante. Aceste eforturi pot produce o uzură excesivă a dinţilor în cazul transmisiilor cu roţi dinţate, alunecarea curelor de transmi-sie, etc. De aceea, reostatele de pornire prin proiectarea lor, se prevăd cu (1...3) trepte de rezistenţă denumite trepte pregătitoare, în cadrul cărora motorul de acţionare dezvoltă un moment al cuplului electromagnetic inferior momentului de pornire în sarcină (deci acţionarea nu începe să se rotească), dar reuşeşte să pună în contact dinţii transmisiei cu roţi dinţate, să pretensioneze curelele, etc, micşorând totodată efortul dinamic iniţial în aceste elemente. După scurtcircuitarea treptelor pregătitoare, motorul de acţionare dezvoltă un moment al cuplului electromagnetic mai mare decât Mrp şi întreaga acţionare începe să se rotească.
2.1.1.4. Pornirea motoarelor de c.c. prin modificarea tensiunii de alimentare
Pornirea în trepte a motoarelor de c.c. are unele dezavantaje dintre care cele mai principale sunt:
modificarea vitezei unghiulare a motorului de acţionare se face în trepte;
prin înserierea unor rezistenţe exterioare în circuitul retoric al motorului se produc pierderi suplimentare prin efect Joule ceea ce îşi are importanţa sa în cazul pornirilor dese.
Pornirea motoarelor de c.c. prin modificarea tensiunii de alimentare se referă la anumite variante, care pot anula aceste dezavantaje; ele sunt:
10

2-
acţionări electrice cu grup generator - motor (G-M) sau aşa-numitul grup Ward-Leonard;
alimentarea de la un grup convertor cu elemente statice, cu tensiunea de ieşire reglabilă în limite largi.
Uneori se mai foloseşte pornirea prin alimentare în trepte de tensiune.
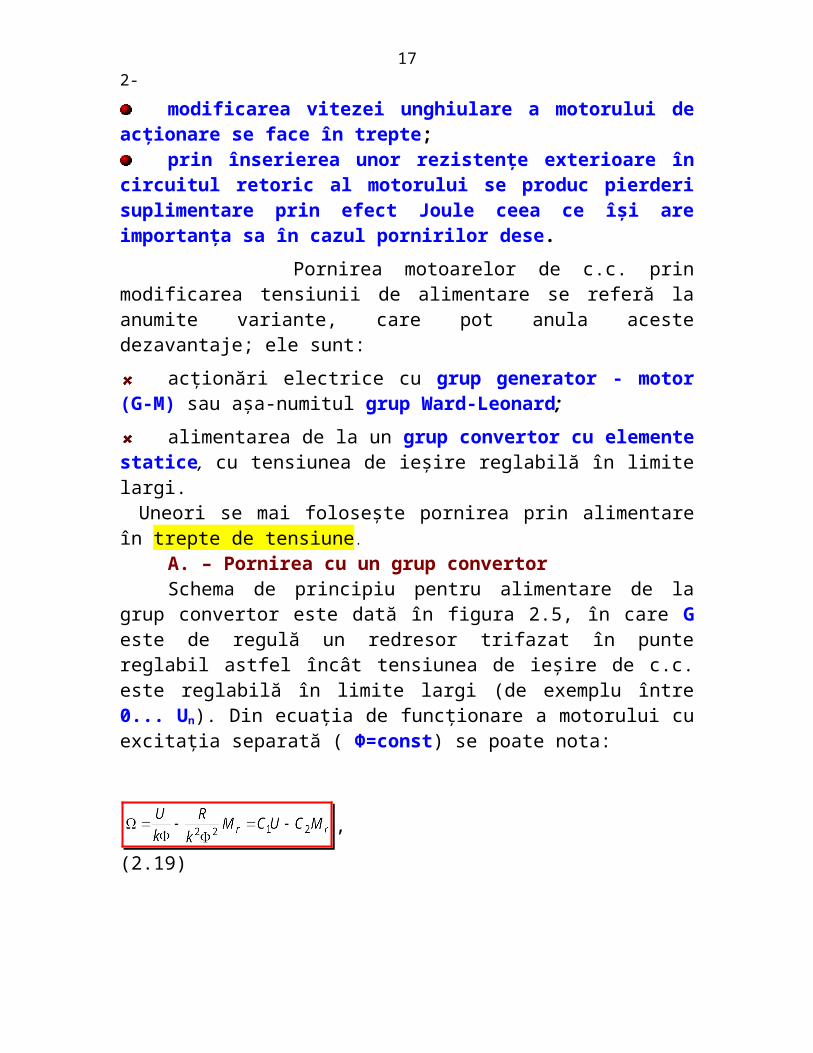
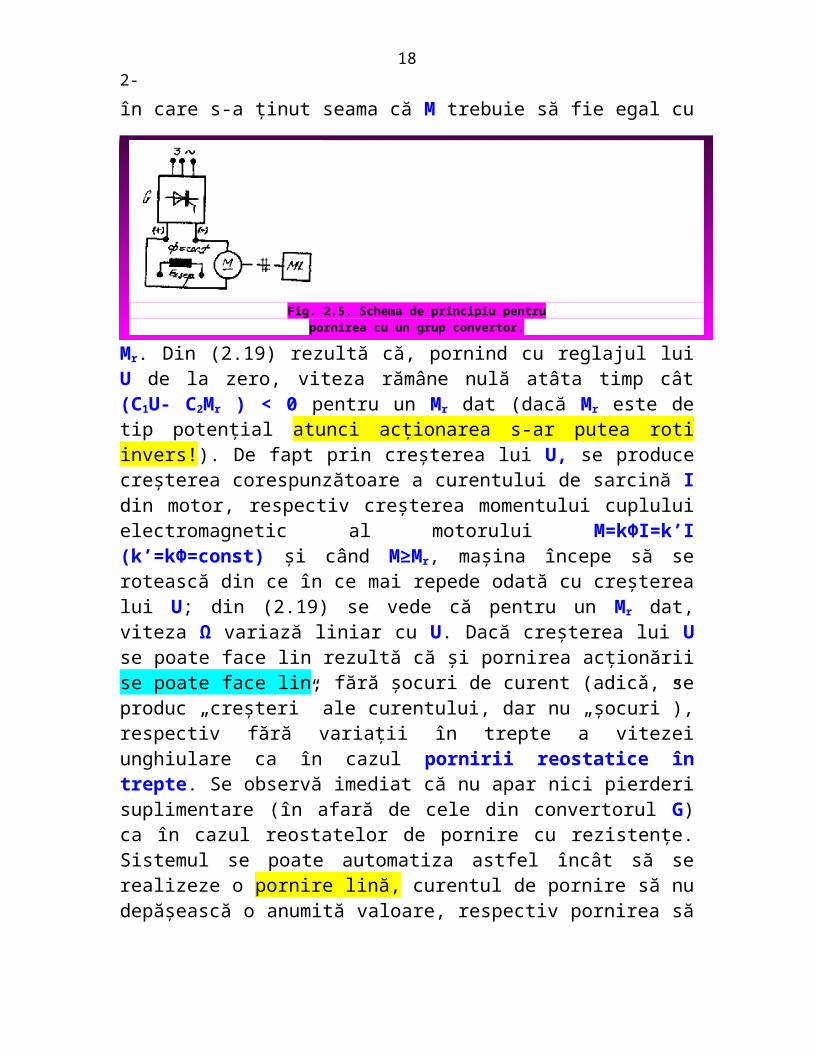
A. – Pornirea cu un grup convertorSchema de principiu pentru alimentare de la grup convertor este dată
în figura 2.5, în care G este de regulă un redresor trifazat în punte reglabil astfel încât tensiunea de ieşire de c.c. este reglabilă în limite largi (de exemplu între 0... Un). Din ecuaţia de funcţionare a motorului cu excitaţia separată ( Φ=const) se poate nota:
, (2.19)
în care s-a ţinut seama că M trebuie să fie egal cu Mr. Din (2.19) rezultă că,
pornind cu reglajul lui U de la zero, viteza rămâne nulă atâta timp cât (C1U- C2Mr ) < 0 pentru un Mr dat (dacă Mr este de tip potenţial atunci acţionarea s-ar putea roti invers!). De fapt prin creşterea lui U, se produce creşterea corespunzătoare a curentului de sarcină I din motor, respectiv creşterea momentului cuplului electromagnetic al motorului M=kΦI=k’I (k’=kΦ=const) şi când M≥Mr, maşina începe să se rotească din ce în ce mai repede odată cu creşterea lui U; din (2.19) se vede că pentru un Mr dat, viteza Ω variază liniar cu U. Dacă creşterea lui U se poate face lin rezultă că şi pornirea acţionării se poate face lin, fără şocuri de curent (adicǎ, se produc „creşteri” ale curentului, dar nu „şocuri”), respectiv fără variaţii în trepte a vitezei unghiulare ca în cazul pornirii reostatice în trepte. Se observă imediat că nu apar nici pierderi suplimentare (în afară de cele din convertorul G) ca în cazul reostatelor de pornire cu rezistenţe. Sistemul se poate automatiza astfel încât să se realizeze o pornire lină, curentul de
11
Fig. 2.5. Schema de principiu pentrupornirea cu un grup convertor.

2-
pornire să nu depăşească o anumită valoare, respectiv pornirea să se realizeze într-un anumit interval de timp convenabil ales. B.– Pornirea în trepte de tensiune
În ceea ce priveşte pornirea în trepte de tensiune ea se foloseşte mai ales în cazul motoarele de c.c. cu excitaţia serie. Un model de schemă ce poate realiza o astfel de pornire este dată în figura 2.6a, iar în figura 2.6b este dat programul realizării unor circuite în cadrul schemei. În schemă sunt prevăzute două motoare de c.c. M1, M2 cu excitaţia serie identice, iar simbolul „x” din cadrul figurii 2.6 b înseamnă că pe o anumită poziţie contactul dat Qk (k = 1,...5) este închis. Programul din figura 2.6 b de închidere/deschidere a unor contacte din circuitul de forţă a schemei se execută de regulă cu un controler (similar cu cel pentru scurtcircuitarea treptelor de rezistenţe), care însă poate realiza programul necesar de comandă. Când însă puterea instalaţiei este mare şi gabaritul controlerului depăşeşte de o anumită mărime ce nu se mai pretează la manevre manuale, atunci se utilizează aşa-numitul comando-controler (variantă valabilă şi la scurtcircuitarea treptelor de rezistenţă), care nu face parte direct din circuitul de forţă al schemei; el comandă, după programul necesar, bobinele unor contactoare ale căror contacte fac parte din circuitul de forţă al schemei. Pentru că bobinele de comandă ale contactoarelor, de regulă, absorb curenţi relativ mici, gabaritele comando-controlerelor sunt mult mai mici decât ale controlerelor obişnuite şi manevrarea lor se face cu un efort manual minim.
Referitor la programul din figura 2.6 b se constată că poziţia „de zero” este o poziţie de nefuncţionare, iar poziţia 1 este pregătitoare pentru că prin închiderea lui Q5 - la bara de (+) o parte din schemă este pusă sub tensiune. Pe poziţia 2 sunt închise contactele Q2, Q5 ceea ce face ca între bara de (+) şi de (-) să apară înseriate rezistenţa exte-rioară R (variabilă) şi motoarele
M1, M2, deci fiecărui motor îi revine mai puţin de jumătate (de regulă M1, M2 sunt identice) din tensiunea sursei de c.c. şi aceasta depinde de valoarea rezistenţei R. În poziţia 3 sunt închise contactele Q1, Q3, Q5, deci motoarele
12
Fig. 2.6. Explicativă privind pornirea în trepte de tensiune a unui motor cu excitaţie serie.

2-
M1, M2 rămân înseriate dar rezistenţa R este scurtcircuitată (adică celor două motoare revine jumătate din tensiunea sursei).Din analiza schemei şi a programului său rezultă că (SAE-ul) dat poate funcţiona cu motoarele legate în paralel în raport cu sursa (cazul sarcinii crescute) sau cu un singur motor cu sau fără înserierea rezistenţei exterioare R. Scheme similare cu cea din figura 2.6 se întâlnesc mai ales la acţionarea electrocarelor, iar toate variantele de schemă cu modificarea tensiunii de alimentare se folosesc de fapt ca scheme pentru reglarea vitezei unghiulare a acţionării şi prin proprietăţile lor specifice se folosesc şi la pornirea acţionării respective urmărindu-se în acest caz reducerea şocului de curent la pornire.
2.1.2. Pornirea motoarelor asincrone (MA)
Aspectele principale ce apar la pornirea motoarelor de c. c. se regăsesc şi la pornirea motoarelor asincrone (MA), doar că ele îşi au anumite particularităţi legate de specificul motorului cum sunt:
nu apar probleme legate de comutaţie;şocul curentului de pornire este ceva mai mic la (MA) Ip=(7…
10)×In, având în vedere că la pornirea (MA) trebuie luată în considerare impedanţa totală pe fază, care oricum este mai mare decât rezistenţa ohmică a fazei;
metodele de pornire depind de tipul (MA): la (MA) cu rotorul în scurtcircuit se operează asupra elementelor din statorul maşinii (în rotorul maşinii nu există acces), iar la (MA) cu inele se operează asupra elementelor din circuitul rotoric al maşinii.
2.1.2.1. Pornirea (MA) cu rotorul în scurtcircuit
2.1.2.1.1. Pornirea directă se referă la conectarea directă la reţeaua de alimentare fără alte elemente intermediare în afară de aparataje obişnuite prevăzută într-o schemă de conectare. Acest tip de pornire se practică de regulă la puteri mici (Pn ≤ 5kW), dar se cunosc şi cazuri de pornire directă şi pentru (MA) de 100 kW. Însă, în această situaţie din urmă, sistemul electro-energetic de la care se alimentează motorul trebuie să fie puternic, iar circuitul de alimentare (separat pentru acest motor) trebuie să fie dimensionat în mod corespunzător, ţinând seama de curentul mare de pornire al motorului.
13

2-
În principiu dacă motorul în cauză se alimentează dintr-un post de transformare al consumatorului, pornirea lui se poate face prin conectare directă, dacă puterea sa nu depăşeşte 20% din puterea transformatoarelor aflate în funcţiune în cadrul postului de transformare de la care se alimentează acesta. Dacă este îndeplinită această condiţie, elementul următor este dimensionare corectă a circuitului său de alimentare pentru că există pericolul ca în timpul pornirii, datorită curentului de pornire mare, să se producă pe circuitul său pronunţate căderi de tensiune, respectiv tensiunea de alimentare este atât de scăzută la bornele motorului (la sarcina dată) încât acesta nu poate atinge turaţia normală şi practic acţionarea trebuie oprită.Pornirea directă a (MA) pretinde cea mai simplă şi deci cea mai ieftină schemă de pornire şi ea cuprinde strict aparatajele electrice necesare pentru pornire şi apoi funcţionarea normală a motorului.
Dacă nu este posibilă o pornire directă a (MA) cu rotorul în scurtcircuit se folosesc o serie de metode de pornire care vizează reducerea curentului de pornire la valori acceptabile.
2.1.2.1.2. Pornirea cu comutatorul Y/Δ a (MA) urmăreşte reducerea curentului de pornire procedând la legarea fazelor statorice ale motorului după cele două conexiuni specifice sistemelor trifazate: Y şi Δ. Varianta aceasta de pornire poate fi deci aplicată numai unui (MA) cu rotor în s.c. trifazat - schema sa de principiu este dată în figura 2.7 . În această schemă este evidenţiată înfăşurarea statorică în mod special (cu bornele sale de intrare şi ieşire) pentru a se vedea legăturile ce se fac la comutatorul
stea/triunghi- Q2 (care este delimitat punctat în cadrul schemei).Rotorul motorului nu este figurat în schemă pentru că oricum nu există acces în circuitele sale.Odată cu închiderea lui Q1
înfăşurarea statorică a (MA) este pusă sub tensiune însă motorul nu începe să se rotească pentru că nu există o circulaţie de curenţi în stator, care să producă un câmp magnetic învârtitor, respectiv un moment al cuplului
14
Fig. 2.7. Explicativă privind pornirea Y/D a unui motor asincron cu colivie.

2-
electromagnetic. Când se închide şi Q2 pe poziţia a, atunci înfăşurarea statorică apare legată în stea şi fiecărei faze statorice îi revine o tensiune egală cu . Motorul porneşte, se produce un şoc de curent dar nu prea mare (pentru că tensiunea este micşorată cu ), turaţia creşte şi curentul începe să scadă (vezi figura 2.7 II). Apoi comutatorul Q2 trece pe poziţia b când înfăşurarea statorică apare conectată în triunghi şi fiecărei faze statorice îi revine tensiunea U. Se produce un nou şoc de curent (de regulă ceva mai mic decât cel iniţial), turaţia motorului creşte până la cea nominală, iar curentul scade, de asemenea, la valoare nominală (dacă sarcina este cea nominală). Procesul pornirii (MA) cu comutatorul Y/Δ este încheiat.Relaţiile dintre tensiuni şi curenţi la conexiunile Y şi Δ ale motorului sunt cele clasice corespunzătoare sistemelor trifazate simetrice:
(2.20)
din care rezultă relaţiile de legătură dintre tensiuni, curenţi şi momente, corespunzătoare celor două scheme:
(2.21)Deci la pornirea (MA) prin metoda Y/Δ, curentul absorbit din reţea
scade la conexiunea Y de 3 ori, dar şi momentul cuplului electromagnetic la pornire Mp scade în aceeaşi proporţie, ceea ce înseamnă că această metodă de pornire, a (MA) poate fi folosită la pornirea în gol sau cu sarcină mică a motorului. La trecerea de la conexiunea Y, la conexiunea Δ au loc salturi de curent (vezi fig. 2.7 II) şi de cuplu şi pentru reducerea acestor şocuri trecerea Y Δ trebuie efectuată la o turaţie cât mai apropiată de cea din regimul stabilizat, adică la (0,9,...0,95)×Ω1.
Această metodă de pornire se aplică la acţionările de putere relativ mică, de până la 15 kW.
În practică se folosesc comutatoare Y/Δ cu funcţionare manuală sau automată. La cele cu funcţionare manuală sunt indicate poziţiile de zero (adică fără funcţionare), de conexiunea Y, respectiv de conexiunea Δ şi de regulă există un sistem de sacadare, care nu permite rămânerea comutatorului între poziţii. De asemenea, există un blocaj mecanic, care nu permite manevra comutatorului decât în sens direct - adică 0 Y Δ, dar nu şi invers. Există însă posibilitatea pornirii motorului (închiderii lui Q1 fig. 2.7 I) când Q2 este „uitat” pe poziţia Δ, ceea ce înseamnă de fapt pornirea directă a motorului.
15
2-
În ceea ce priveşte comutatoarele Y/Δ automate, ele sunt automate în sensul că „trecerea” de la conexiunea Y a înfăşurării motorului, la conexiunea Δ, se face în mod automat, după un interval de timp dat (care eventual poate fi şi reglat); de obicei aceste comutatoare automate se formează din două contactoare trifazate obişnuite.
Mai trebuie remarcat că această metodă de pornire poate fi aplicată (MA), care au scoase în cutia borne statorică toate cele 6 capete ale înfăşurării statorică şi că conexiunea finală a înfăşurării statorice cu care rămâne să funcţioneze motorul este conexiunea Δ. În această idee, dacă reţeaua de alimentare existentă are tensiunea Ul=380 V şi se ia în considerare un (MA) a cărui plăcuţă de fabricaţie conţine indicaţia Y/Δ - 380/220 V, atunci acest motor nu poate fi pornit cu un comutator Y/Δ pentru că la conexiunea finală cu care rămâne să funcţioneze motorul după pornirea sa) el necesită o tensiune Ul= 220 V, iar reţeaua de alimentare are tensiunea Ul= 380 V.
Uneori în practică apar situaţii în care sarcina motorului devine ≤3o% din cea nominală şi dacă eventual motorul a fost pornit Y/Δ (cazul concret al
maşinilor unelte), atunci în această situaţie este bine ca motorul să fie trecut (eventual în mod automat) din Δ în Y pentru că în acest fel se pot obţine unele economii la consumul de energie electrică şi se îmbunătăţesc unii parametri energetici ai motorului (cosφ, η).
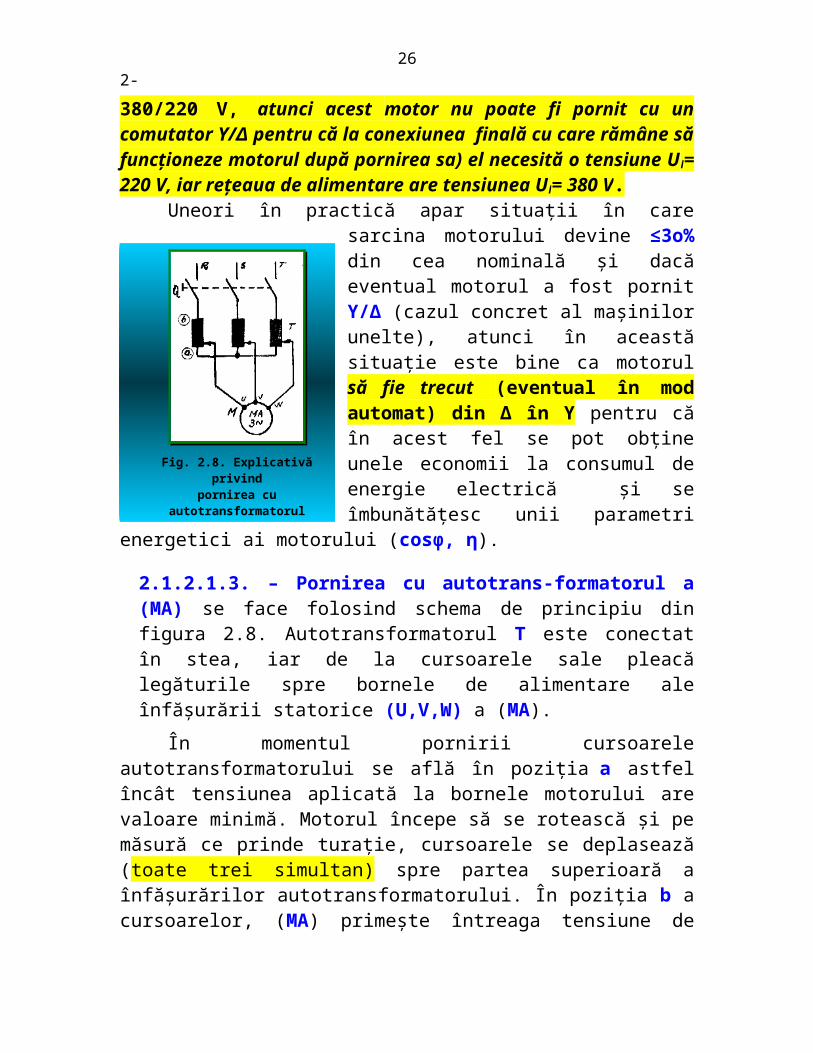
2.1.2.1.3. – Pornirea cu autotrans-formatorul a (MA) se face folosind schema de principiu din figura 2.8. Autotransformatorul T este conectat în stea, iar de la cursoarele sale pleacă legăturile spre bornele de alimentare ale înfăşurării statorice (U,V,W) a (MA).
În momentul pornirii cursoarele autotransformatorului se află în poziţia a astfel încât tensiunea aplicată la bornele motorului are valoare minimă. Motorul începe să se rotească şi pe măsură ce prinde turaţie, cursoarele se deplasează (toate trei simultan) spre partea superioară a înfăşurărilor autotransformatorului. În poziţia b a cursoarelor, (MA) primeşte întreaga tensiune de alimentare a reţelei. În acest fel se poate realiza o pornire lină şi fără şocuri de curent a (MA). Este important ca deplasarea cursoarelor de la poziţia a, spre poziţia b să se facă sincron (simultan pentru toate cele trei cursoare) pentru că altfel se ajunge la
16
Fig. 2.8. Explicativă privindpornirea cu autotransformatorula unui motor asincron în colivie.
2-
alimentarea nesimetrică a (MA), care produce o funcţionare anormală a motorului. Într-o astfel de situaţie pot apare vibraţii puternice ale motorului ce pot provoca distrugerea lagărelor motorului,a elementelor transmisiei, etc.Dacă se notează ce notează cu: Ip1 curentul absorbit de motorul M la pornire prin autotransformatorul T fiind alimentat cu tensiunea redusă Up ; Ipn
curentul absorbit de motorul M la pornirea directă fiind alimentat cu tensiunea Un; Ip curentul absorbit de autotransformator la pornirea sistemului, atunci se poate admite egalitatea puterilor : (2.22)
(în care se neglijează pierderile prin autotransformator), respectiv se poate nota:
(2.23)
în care cu a s-a notat raportul de reducere a tensiunii prin autotransforma-torul T. Dacă se admite că curentul absorbit de motorul M este proporţional cu tensiunea aplicată, atunci se mai poate nota:
, (2.24)
iar dacă se înmulţesc relaţiile (2.23) şi (2.24) atunci rezultă:
, (2.25)
adică raportul curenţilor absorbiţi din reţea la pornirea directă a lui MA şi prin autotransformator este egal cu pătratul raportului reducerii tensiunilor. Pe de altă parte, din (1.175) pentru s=1 se obţine M=Mp şi luând în considerare relaţia respectivă pentru U1=Un şi U1=Up, rezultă:
(2.26)
adică, cuplul electromagnetic se micşorează în acelaşi raport ca şi curentul. De aici concluzia imediată: pornirea cu autotransformatorul este avantajoasă (scade curentul de pornire) însă necesitând un autotransformator trifazat special, se justifică numai la acţionari de puteri mari şi când M rp/Mn este relativ mic.
2.4.2.1.4. Pornirea cu impedanţe înseriate în circuitul statoric al (MA) se face după schema de principiu din figura 2.9. Pentru pornirea motorului M se închide Q1 şi Q2, se produce un şoc oarecare (scăzut) de curent pentru că tensiunea de la bornele motorului (U,V,W) este micşorată
17
2-
datorită căderii de tensiune pe impedanţa Rs (poate fi doar o simplă rezis-tenţă) înseriată pe fazele statorice ale motorului. După ce motorul prinde o
turaţie suficient de mare se închide Q3 care de fapt scurtcircuitează impedanţa Rs şi deci la bornele motorului ajunge întreaga tensiune a reţelei de alimentare, se produce al doilea şoc de curent şi în timp ce curentul scade la valoare nominală turaţia creşte la valoare nominală (dacă sarcina motorului este cea nominală). Procesul tranzitoriu de pornire este încheiat, iar evoluţia curentului în timp în perioada de pornire în acest caz este similară cu cea din graficul din fig. 2.7. II.
Admiţând un raport de reducere a tensiunii a dat de la bornele motorului, se poate nota succesiunea de egalităţi :
.
Dar în general avem :
,
respectiv în cazul pornirii (s=1) se poate nota :
şi . (2.27)
Deci pentru un a (raport de reducere al tensiunii) dat, rezultă :
, (2.28)
din care se poate deduce Rs în condiţiile în care se cunosc ceilalţi parametri : ( ).. Dacă în locul rezistenţelor Rs se folosesc reactanţe Xs, atunci calculul acestora se poate face cu o relaţie dedusă similar cu cea din (2.28). Uneori în locul a trei rezistenţe Rs (reactanţe Xs) identice montate în serie pe cele trei faze statorice ale motorului se montează o singură rezistenţă Rs (bobină Xs) pe una din fazele statorice. Schema este mai
18
Fig. 2.9. Explicativă privind pornireaunui MA prin înserierea unor
impedanţeîn circuitul statoric al motorului.
2-
simplă, dar are dezavantajul nesimetriei curenţilor statornici şi de aceea se foloseşte la acţionări de puteri relativ mici ( ).
2.1.2.1.5. Pornirea prin modificarea continuă a tensiunii de alimentare se poate face considerând schema de principiu din figura 2.10. Pe fiecare fază a circuitului de alimentare a motorului M sunt conectate în
montaj antiparalel câte două tiristoare astfel încât în semiperioada pozitivă să se găsească în regim de conducţie unul dintre tiristoare (cel pentru care semiperioada respectivă reprezintă tensiunea directă), iar când apare semiperioada negativă să intre în regim de conducţie celălalt tiristor. Modificând unghiul de întârziere la aprindere α al tiristoarelor se poate modifica în mod continuu valoarea efectivă pe fază a tensiunii, de la valori foarte mici până la valoare nominală. În acest fel se poate realiza o pornire lină a (MA), fără
şocuri de curent. Trebuie avut însă în vedere faptul că la (MA) momentele Mp, Mc sunt funcţii de (U2) şi deci este posibil ca la o anumită tensiune de alimentare scăzută, cu o sarcină Mr dată la arbore, motorul să nu înceapă să se rotească manifestându-se în această situaţie ca un motor cu rotor calat, curentul absorbit fiind destul de mare. Dacă pe lângă cele trei grupuri de tiristoare- figura 2.10. – mai există încă două grupuri similare care se leagă însă la două faze inversate (ca almentae la bornele motorului), atunci se va putea realiza pornirea motorului M şi în sens invers.
În principiu însă, cele trei grupuri de tiristoare conectate în montaj antiparalel pot juca şi rolul unui contactor static pentru că dacă tiristoarelor V1,...,V6 nu li se aplică impuls pe poartă, ele rămân toate blocate, iar motorul M nu se alimentează.
2.4.2.4.6. Pornirea cu ajutorul unui motor auxiliar seamănă într-o bună măsură cu pornirea motorului sincron cu ajutorul unul motor de lansare. Schemele de principiu pentru o astfel de pornire a unui (MA) sunt date în figura 2.11 a şi b. Referindu-ne la figura 2.11 a, în prima fază a pornirii Q1 este deschis şi Q2 închis astfel încât motorul auxiliar M2 (un motor asincron cu inele şi pornire pe rezistenţe R) lansează motorul M1
ridicându-i turaţia până la o anumită valoare (numărul perechilor de poli la M1 şi la M2 este diferit, de regulă mai mare la M2). După această fază a
19
Fig. 2.10. Schema de principiu pentrupornirea unui MA prin modificareacontinuă a tensiunii de alimentare.

2-
pornirii se închide Q1 şi se deschide Q2 şi M2 cu turaţia deja ridicată apare cuplat la reţea, astfel încât şocul curentului de pornire este mult diminuat.În varianta din figura 2.11 b în prima fază a pornirii avem Q1 închis şi Q2
deschis, iar motorul auxiliar M2 (un (MA) cu inele şi pornire pe rezistenţa R) porneşte prin înfăşurarea statorică a motorului M1 (care joacă rol şi de impedanţă de pornire pentru M2 dar şi înfăşurarea statorică a lui M2
poate fi privită ca o impedanţă exterioară înseriată cu statorul lui M1), turaţia motorului este ridicată până la o anumită valoare dată. După această
fază a pornirii se închide şi Q2, care de fapt închide steaua înfăşurării statorice a motorului M1 şi scurtcircuitează alimentarea motorului M2. Motorul M1 se găseşte acum normal alimentat, se produce un şoc de curent scăzut şi motorul obţine turaţia normală.
Dezavantajul principal al acestei metode de pornire este aceea că apare necesitatea unui motor auxiliar, care este de obicei un motor asincron cu inele şi cu pornire pe rezistenţe. Puterea motorului auxiliar este mult mai mică (circa 10...15% din puterea lui M1) dar el măreşte totuşi costul instalaţiei şi rămâne o putere blocată (motorul M2 nu se mai foloseşte după pornirea lui M1). De asemenea, pornirea motorului M1 trebuie făcută în gol.
Aceste 2 metode de pornire se folosesc la pornirea (MA) cu rotorul în scurtcircuit de puteri mari ( ≥ 1000 kW).
2.1.2.2. Pornirea (MA) cu inele.
Majoritatea metodelor de pornire (în afară de prima şi ultima) prezentate pentru (MA) (şi care sunt cele mai utilizate în practică) se rezumă la micşorarea tensiunii de la bornele motorului în vederea reducerii şocului curentului de pornire. Ori, Mp depinde de (U2) (vezi relaţia (1.175) pentru s=1) şi deci odată cu scăderea tensiunii de la bornele motorului, scade în mod substanţial momentul cuplului de pornire al (MA). Adică în afară de cazul pornirii directe, care se întrebuinţează la (MA) de puteri relativ mici (metoda motorului auxiliar se foloseşte la (SAE) de puteri mari, dar pornirea se face, în general, în gol), în cadrul celorlalte metode de pornire apare
20
Fig. 2.11. Explicativă privind pornirea MAcu ajutorul unui motor auuxiliar.

2-
aspectul menţionat, ceea ce duce imediat la concluzia că (MA) cu colivie nu este bun pentru (SAE) cu porniri grele. De aceea în acest caz se pot folosi (MA) cu inele, cu pornirea în trepte de rezistenţă (similar cu motorul de c.c.) introduse în circuitul rotoric; prin înserierea unor rezistenţe în rotorul maşinii scade şocul curentului de pornire, dar în acelaşi timp creşte în mod corespunzător Mp (vezi graficele din figura 1.66) şi ambele elemente sunt deosebit de importante în cazul unor (SAE) cu porniri grele.
Pentru pornirea (MA) cu inele se folosesc următoarele variante:
înserierea rezistenţelor exterioare în circuitul rotoric;înserierea unor bobine de reactanţă în circuitul rotoric.
Mai rar se foloseşte metoda pornirii cu amplificatoare magnetice utilizate, de asemenea, în circuitul rotoric al motorului.
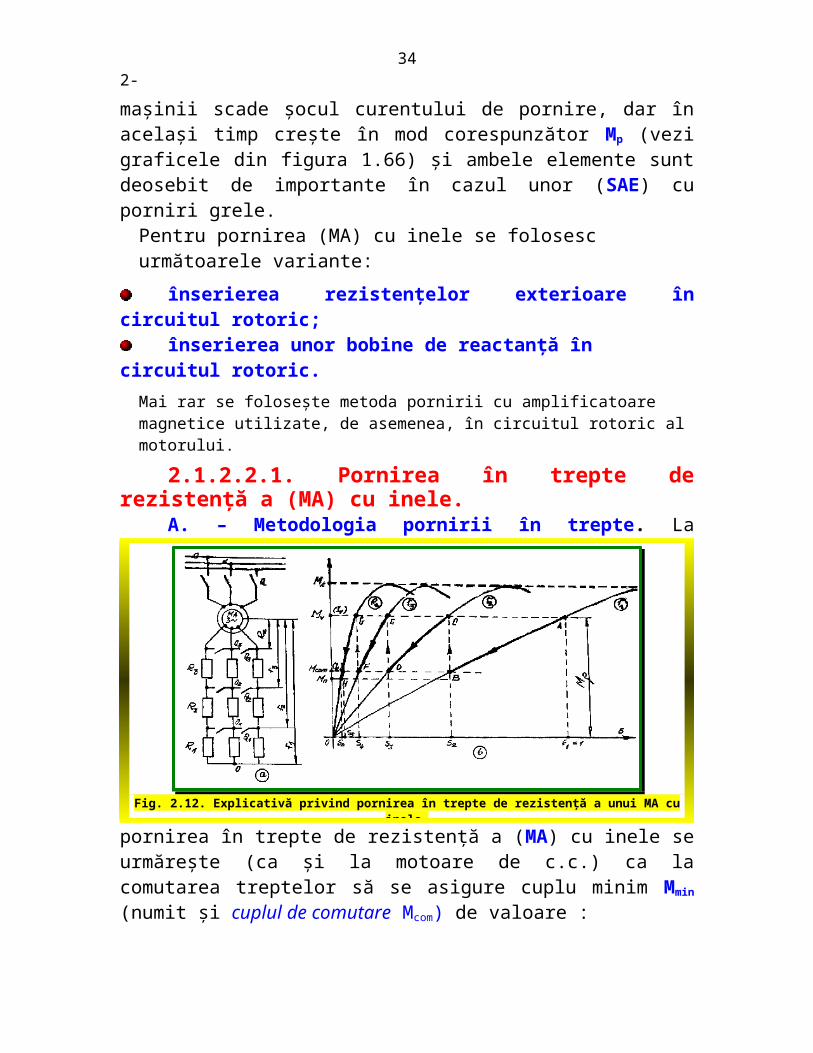
2.1.2.2.1. Pornirea în trepte de rezistenţă a (MA) cu inele.A. – Metodologia pornirii în trepte. La pornirea în trepte de
rezistenţă a (MA) cu inele se urmăreşte (ca şi la motoare de c.c.) ca la comutarea treptelor să se asigure cuplu minim Mmin (numit şi cuplul de comutare Mcom) de valoare : Mmin=Mcom=(1,05…1,15)×Mn, (2.29)iar la pornirea în gol sau la sarcină redusă acesta poate fi chiar ceva mai mic. Valoarea maximă a cuplului la pornire Mmax (numit şi cuplul de vârf Mv) se alege astfel încât şocul curentului rotoric de pornire să rămână în limitele : I2max=(1,5…,2)×I2n, (2.30) acest lucru este important mai ales în cazul pornirilor dese), dar nici solicitările mecanice să nu fie depăşite.
21
Fig. 2.12. Explicativă privind pornirea în trepte de rezistenţă a unui MA cu inele.

2-
Pentru analiza procesului de pornire în trepte de rezistenţă a unui (MA) cu inele se ia în considerare schema de principiu din figura 2.12 a şi graficele corespunzătoare M=f(s) din figura 2.12 b.
La pornire, Q este închis iar contactele contactoarelor de accelerare Q1, Q2, Q3 (schema se referă doar la trei trepte de rezistenţă) sunt deschise şi deci pe fiecare fază, în momentul pornirii, rezistenţa totală este (Ra+ R1+ R2+ R3)=r1. Ne găsim deci pe caracteristica mecanică reostatică r1 (figura 2.12 b) pentru s=1, în punctul A. Motorul începe să se rotească (dacă Mp>Mrp) şi punctul de funcţionare se deplasează în sensul scăderii alunecării s, pe această caracteristică până în punctul B când M=Mcom şi primul contactor de accelerare îşi închide contactele sale Q1 scurtcircuitând prima treaptă de rezistenţă R1; se admite că fiecare treaptă de rezistenţă are aceeaşi valoare pe toate cele trei faze retorice; adică reostatul trifazat de pornire este simetric. Operaţiunea de comutare a primei trepte de rezistenţă se produce la alunecarea s2, adică la viteza unghiulară rotorică Ω2 (2).Din figura 2.12 a se remarcă imediat că reostatul trifazat de pornire are conexiunea stea şi că odată cu scurtcircuitarea treptei R1, nulul stelei reostatului se mută din punctul O, în punctul O1.
Valoarea R1 a treptei de rezistenţă este astfel aleasă încât trecând pe caracteristica mecanică artificială r2 (r2 = Ra + R2 + R3), prin scurtcircuitarea sa, momentul cuplului electromagnetic devine din nou Mv. Ca şi la pornirea motoarelor de c.c., trecerea de pe o caracteristică artificială pe alta se face la viteza unghiulară constantă, respectiv la alunecarea constantă, cu alte cuvinte segmentul BC este paralel cu axa ordonatelor în sistemul (MOS) din figura 2.12 b.
Parcurgând toate caracteristicile artificiale prin scurtcircuitarea pe rând a treptelor de rezistenţă R2, R3, etc se ajunge pe caracteristica mecanică naturală Ra, corespunzătoare rezistenţei ohmice a unei faze rotorice a (MA). Pe această caracteristică punctul de funcţionare se stabileşte în funcţie de sarcina motorului; dacă sarcina este cea nominală atunci punctul de funcţio-nare va fi H de coordonate (Mn, sn) - figura 2.12 b.În acest fel, pornirea (MA) cu inele în trepte cu ajutorul unui reostat trifazat simetric este încheiată.
B. – Tipurile reostatelor de pornire trifazateÎn practică se folosesc însă foarte adesea reostate trifazate de pornire nesimetrice, adică de regulă, rezistenţele exterioare înseriate pe cele trei faze retorice, în perioada pornirii, nu sunt egale. Un exemplu de reostat trifazat de pornire nesimetric este prezentat în figurile 2.13 a, b, c, d, e, care redau de fapt şi programul scurtcircuitării treptelor de rezistenţă, care se realizează cu
22

2-
un controler sau comando-controler. Din filmul reprezentărilor date în figura 2.13 rezultă că pe poziţia IV a controlerului toate rezistenţele reostatului de pornire sunt introduse (înseriate) în circuitul retoric al motorului; ele în principiu nu au aceleaşi valori pe fazele rotorice. Pe poziţia III a controleru-lui este scurtcircuitată o rezistenţă pe faza a rotorică, iar pe poziţia II este scurtcircuitată o rezistenţă şi pe faza b rotorică, etc. Pe poziţia de zero a
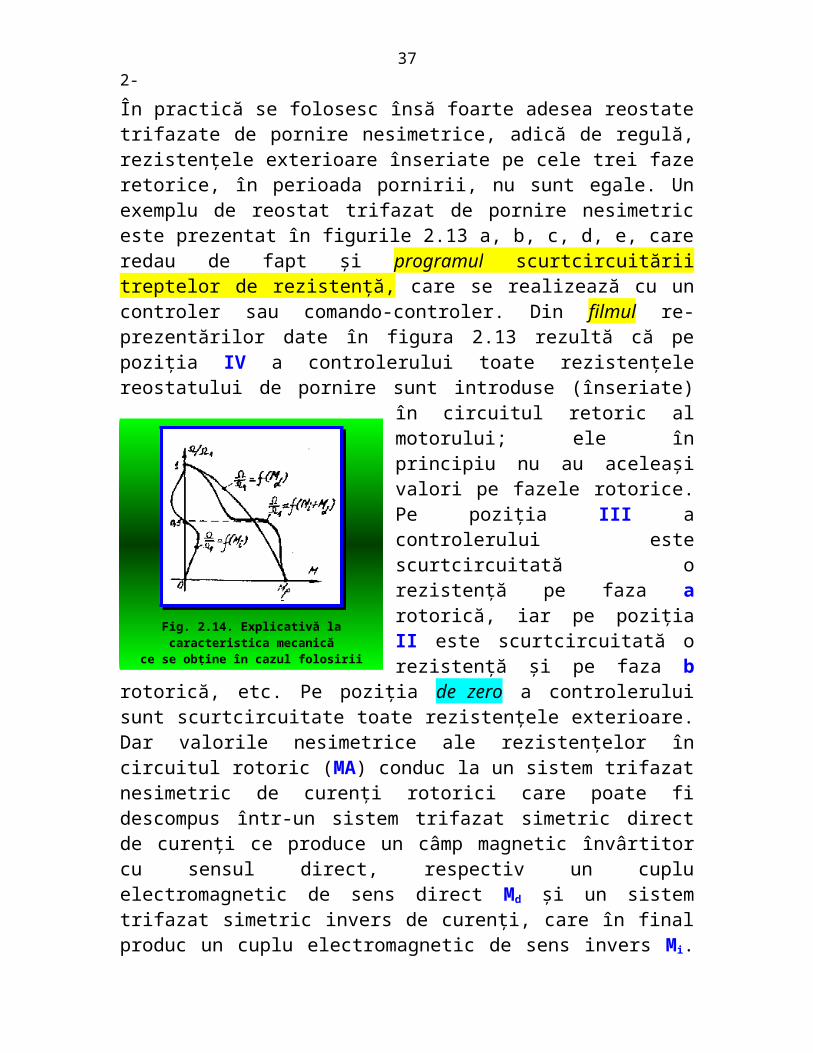
controlerului sunt scurtcircuitate toate rezistenţele exterioare. Dar valorile nesimetrice ale rezistenţelor în circuitul rotoric (MA) conduc la un sistem trifazat nesimetric de curenţi rotorici care poate fi descompus într-un sistem trifazat simetric direct de curenţi ce produce un câmp magnetic învârtitor cu sensul direct, respectiv un cuplu electromagnetic de sens direct Md şi un sistem trifazat simetric invers de curenţi, care în final produc un cuplu electromagnetic de sens invers Mi. Cuplul electromagnetic rezultant M va fi egal cu suma algebrică a celor două
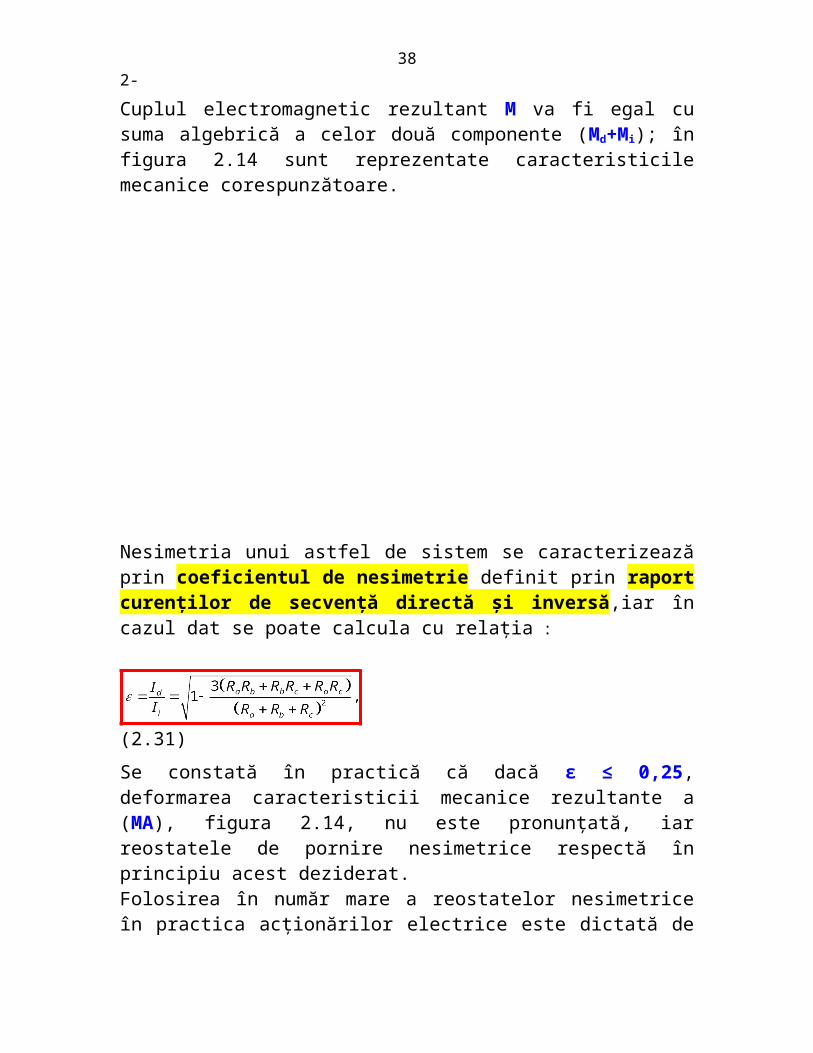
componente (Md+Mi); în figura 2.14 sunt reprezentate caracteristicile mecanice corespunzătoare.Nesimetria unui astfel de sistem se caracterizează prin coeficientul de nesimetrie definit prin raport curenţilor de secvenţă directă şi inversă,iar în cazul dat se poate calcula cu relaţia :
(2.31)
Se constată în practică că dacă ε ≤ 0,25, deformarea caracteristicii mecanice rezultante a (MA), figura 2.14, nu este pronunţată, iar reostatele de pornire nesimetrice respectă în principiu acest deziderat.
23
Fig. 2.13. Explicativă pentru folosirea reostatelor trifazate nesimetrice.
Fig. 2.14. Explicativă la caracteristica mecanicăce se obţine în cazul folosirii reostatelor
trifazate nesimetrice.
2-
Folosirea în număr mare a reostatelor nesimetrice în practica acţionărilor electrice este dictată de raţiuni tehnico-economice pentru că ele necesită, în general, un număr mai mic de elemente de rezistenţe pentru un număr dat de trepte de comutare, deci numărul contactelor controlerului este mai mic (respectiv gabaritul, costul acestuia sunt mai reduse), iar schemele de legă-turi mai simple.În ceea ce priveşte sistemele de scurtcircuitare a treptelor de rezistenţe din cadrul reostatului de pornire, se folosesc mai multe scheme fiecare având particularităţile sale:
în figura 2.12 a rezistenţele sunt montate în stea completă, iar contactele contactorului de scurtcircuitare (accelerare) în stea incompletă; este schema cea mai utilizată în practică pentru că necesită cele mai simple legături;
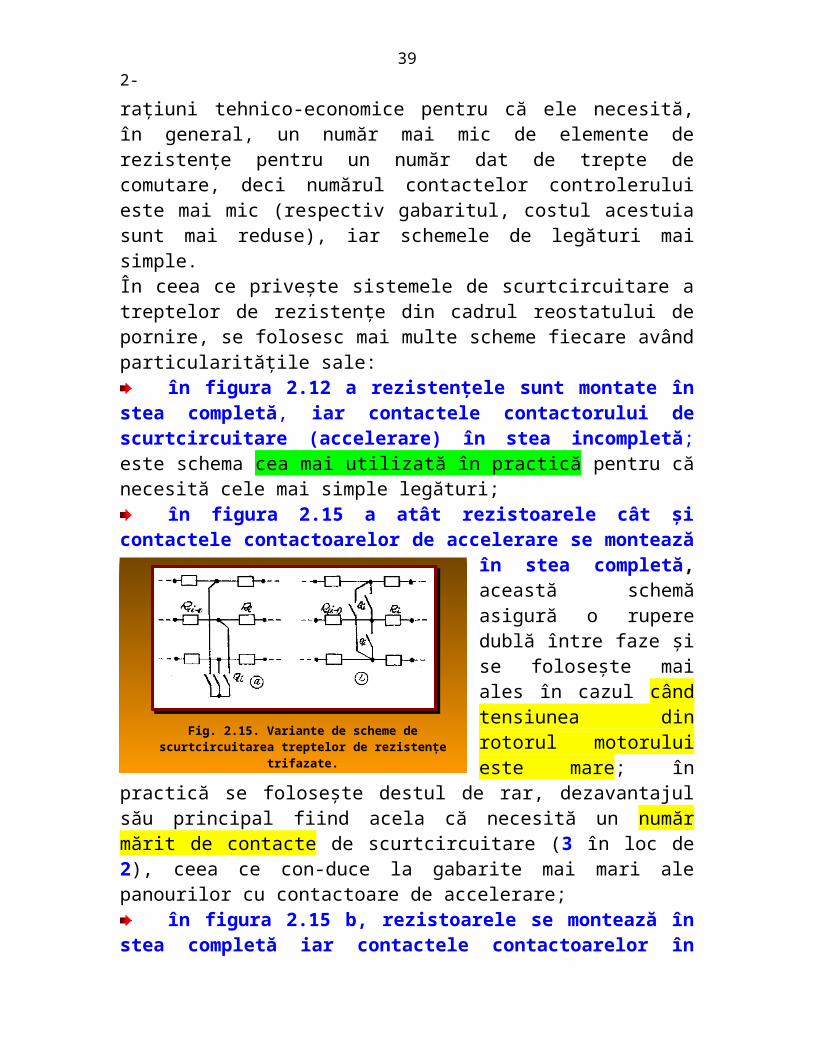
în figura 2.15 a atât rezistoarele cât şi contactele contactoarelor de accelerare se montează în stea completă, această schemă asigură o rupere
dublă între faze şi se foloseşte mai ales în cazul când tensiunea din rotorul motorului este mare; în practică se foloseşte destul de rar, dezavantajul său principal fiind acela că necesită un număr mărit de contacte de scurtcircuitare (3 în loc de 2), ceea ce con-duce la gabarite mai mari
ale panourilor cu contactoare de accelerare;în figura 2.15 b, rezistoarele se montează în stea completă iar
contactele contactoarelor în triunghi, această schemă necesită, de asemenea, un număr sporit de contacte, însă contactele fiind legate în conexiunea triunghi sunt străbătute de curenţi mai mici decât în schemele precedente; de aceea această variantă se foloseşte numai în cazul în care, faţă de stea incompletă, se pot utiliza contactoare pentru curenţi mai mici (deci gabarite şi costuri mai mici), căci altfel legăturile pentru realizarea schemei sunt mai complicate decât pentru primele două variante.
2.1.2.2.2. Calculul rezistenţelor de pornire la (MA) cu inele.
24
Fig. 2.15. Variante de scheme de scurtcircuitarea treptelor de rezistenţe trifazate.

2-
A. Posibilitatea folosirii metodei analitice. Caracteristica mecanică a (MA) pe porţiunea sa stabilă de funcţionare (porţiune pe care de regulă funcţionează (MA)) se consideră liniară deşi ea nu este totuşi liniară. Dacă se consideră liniară atunci calculul rezistenţelor de pornire se poate face analitic cu o metodologie apropiată de cea corespunzătoare pentru motorul de c. c. Se poate demonstra însă că este justificată o astfel de abordare. În principiu, rezistenţele reostatului de pornire şi numărul de trepte se dimensio(1.175) rezultă că pentru M=const, alunecarea motorului s se modifică proporţional cu rezistenţa totală a unei faze retorice, adică nează astfel încât pornirea să aibă loc la un cuplu mediu, care să asigure o anumită acceleraţie a (SAE). Astfel, din relaţia cuplului electromagnetic pentru (MA) din, din (1.175) rezultă că pentru M=const, alunecarea motorului s se modifică proporţional cu rezistenţa totală a unei faze retorice, adică :
sau (2.32)
Atunci, având în vedere graficele din figura 2.12 b, pentru M=Mv se poate nota
, (2.33)
iar pentru M=Mcom avem :
. (2.34)
Pe de altă parte, dreptele ce trec prin punctele de in-tersecţie a două caracteristici mecanice oarecare, cu dreptele cuplurilor M şi Mcom=const, sunt concurente într-un punct P dispus pe axa ordonatelor a cărui poziţie nu depinde decât de valoarea cuplurilor menţionate, iar figura 2.16 ilustrează acest lucru pentru caracteristicile mecanice r2 şi r3
preluate din figura 2.12. Cu notaţiile din figura 2.16 ecuaţia dreptei este :
(2.35)
25
Fig. 2.16. Explicativă privind aplicarea metodei analiticepentru calculul rezistenţei de pornire la MA cu inele.
2-
iar pentru dreapta este
(2.36)
Dacă se notează raportul rezistenţelor r2, r3 cu δ, atunci pentru cuplul M=Mv
din (2.33) rezultă iar pentru cuplul M=Mcom din (2.34) rezultă .
Scriind ecuaţia dreptei din (2.35) pentru s = 0 (adică M=Mp) avem :
(2.37)
iar dacă se scrie ecuaţia dreptei din (2.36) pentru s=0 (adică M=M’p), avem :
. (2.38)
Din relaţiile (2.37) şi (2.38) rezultă că , adică dreptele şi se intersectează în acelaşi punct P. Acest lucru este valabil şi pentru celelalte caracteristici artificiale, respectiv apare concluzia că porţiunile respective de caracteristici mecanice se pot aproxima cu nişte drepte, pentru care se poate aplica metoda analitică pentru determinarea rezistenţelor de pornire.
B.- Calculul rezistenţelor de pornire.Varianta B1. Observând faptul că Mv şi Mcom au aceleaşi valori
pentru toate treptele de rezistenţă, rezultă că în relaţiile din (2.33), (2.34) toate rapoartele de rezistenţe , au aceeaşi valoare δ şi atunci pentru relaţiile amintite se poate nota expresia generală :
, (2.39)iar pentru cazul general cu n trepte de rezistenţe se poate nota şirul de egalităţi : , (2.39a)respectiv ,din care rezultă
sau . (2.40)
În vederea determinării lui δ din a doua relaţie (2.40), este necesară valoarea lui , care reprezintă alunecarea ( ) corespunzătoare caracteristicii mecanice naturale când M=Mcom . Ori, aceasta se poate calcula
26
2-
din relaţia lui Kloss (1.179) (sau relaţia simplificată a lui Kloss (1.180)) considerând M=Mcom, adică :
, respectiv (2.41)
Dacă se foloseşte relaţia simplificată a lui Kloss, atunci din a doua relaţie (2.41) rezultă , (2.42)în care s-a notat .Deci δ fiind determinat, se pot calcula rezistenţele treptelor reostatului de pornire cunoscând că acestea cresc în progresie geometrică cu raţia δ (ca şi în cazul maşinii de c.c., pentru că echivalând caracteristicile mecanice ale motorului asincron cu nişte drepte corespunzătoare, metodologia rămâne aceeaşi), respectiv se poate nota relaţia . (2.43)Varianta B2. Din şirul de egalităţi (2.39a) rezultă şirul de relaţii :
,
adică
, (2.44)
în care r1 este rezistenţa totală pe o fază a circuitului retoric, iar Ra este rezistenţa ohmică a unei faze rotorice propriu-zise. Rezistenţa r1 trebuie aleasă astfel încât pentru s=l să se respecte condiţia (2.30). Ori, calculul curentului rotoric pe o fază (neglijând reactanţa fazei) se poate face cu relaţia :
, (2.45)
în care dacă se impune s=1 şi condiţia (2.30), se poate determina r1
. (2.46)
Deci sn+1 se poate calcul şi în această variantă, alegându-se moda-litatea cea mai uşoară din punct de vedere date cunoscute, etc.
Numărul treptelor reostatului de pornire se determină ca şi în cazul motorului de c.c. cu adoptarea actualelor notaţii :
(2.47)
27

2-
Ajustând valorile cuplurilor Mv, Mcom conform cu condiţiile din (2.29) şi (2.30), după câteva tatonări se obţine pentru n numărul întreg imediat superior celui fracţionar obţinut iniţial.
În ceea ce priveşte reostatele nesimetrice ele sunt construite astfel încât rezistenţele de pornire se scurtcircuitează în mod succesiv pe fiecare fază în parte, aşa cum s-a prezentat şi în filmul din figura 2.13. Atunci când coeficientul de nesimetrie ε ≤ 0,25, rezistenţele reale de pe fazele retorice Ra, Rb, Rc pot fi înlocuite cu rezistenţe simetrice echivalente (pe criteriul egalităţii pierderilor) astfel încât, de exemplu, pentru orice poziţie x a controlerului reostatului, să avem
(2.48)
Din (2.48) rezultă că rezistenţa, pe o fază a reostatului simetric echivalent este egală cu rezistenţa medie a reostatului nesimetric pe poziţia dată, iar valorile rezistenţelor pe cele trei faze ale reostatului nesimetric pe poziţia respectivă formează între ele o progresie geometrică cu raţia δ; această raţie este aceeaşi cu cea a reostatului simetric pentru diverse poziţii ale sale.Respectând aceste reguli în mod automat sunt îndeplinite condiţiile impuse pentru reostatele nesimetrice. Astfel, pentru modelul de reostat nesimetric din figura 2.13 se poate întocmi următorul tabel de valori de rezistenţe ce se găsesc pe fazele rotorice în timpul pornirii. Deci metodologia pentru calculul unui reostat nesimetric ar fi următoarea:
Tabela 2.1
Poziţia controlerului
Rezistenţele totale din fazele rotorice
Reostatul simetricReostat nesimetric
Fazaa
Fazab
Fazac
0 Ra Ra Ra Ra
I r4=Ra+R4 δ2Ra δRa Ra
II r3=Ra+R4+R3 δ2Ra δRa δ3Ra
III r2=Ra+R4+R3+R2 δ2Ra δ4Ra δ3Ra
28

2-
IV r1=Ra+R4+R3+R2+R1 δ5Ra δ4Ra δ3Ra
se determină rezistenţele de pornire ca la un reostat simetric;se verifică valoarea coeficientului de nesimetrie considerând expre-
siile din (2.48) introduse în (2.31) din care rezultă de fapt expresia :
; (2.49)
se repartizează rezistenţele nesimetrice pe fazele rotorice conform cu relaţiile din (2.48);
se stabileşte programul de scurtcircuitare a rezistenţelor cu controlerul în cadrul reostatului nesimetric.
2.1.2.2.3. Pornirea (MA) cu inele cu bobine de reactanţă.
Varianta aceasta de pornire a (MA) se aplică la unele acţionări mai importante şi de mare putere - de exemplu, la acţionarea troliilor de foraj. Schema de principiu este prezentată în fig. 2.17 a. Schema are marele avantaj al simplităţii prin numărul redus de contacte şi rezistoare, faptul ce măreşte fiabilitatea sa. Alimentarea motorului
se face prin închiderea lui Q1 (când este necesar se prevede încă un contactor Q1 care inversează două faze de alimentare pentru inversarea sensului de rotire la M) şi Q2 fiind deschis se obţine caracteristica mecanică 3 - figura 2.17 b cu ajutorul căruia se urmăreşte o pornire cât mai lină. După ce se închide Q2, treapta de rezistenţă R1 este eliminată (este o treaptă de pornire prealabilă) şi rămâne rezistenţa R2 în paralel cu seria (R3 + X). Modificările impedanţei totale din fazele rotorice se face de aici în colo în mod automat pe măsură ce motorul prinde turaţie: astfel la alunecări mari (începutul pornirii) f2 din rotor este mare (f2=sf1), deci reactanţa X, respectiv impedanţa
29
Fig. 2.17. Explicativă privind pornirea MA cu bobine de reactanţă.

2-
echivalentă Z, pe faza rotorică va fi mare. Pe măsură ce scade f2, scad şi X, Z, iar aproape de turaţia de sincronism X devine foarte mică şi R2 apare practic scurtcircuitată. Rezistenţa R3 are rolul de a asigura o caracteristică mecanică 2 (vezi fig. 2.176) mai moale decît c.m.n.1.
În cea ce priveşte pornirea motoarelor sincrone ea se tratează de regulă în cadrul cursului de „Convertoare electromecanice” (vezi cap. Maşina sincronă) fiind legată şi de anumite elemente constructive specifice metodei de pornire şi această problemă nu se va relua aici. Se poate spune că cel mai adesea pornirea motoarelor sincrone se face în asincron, pe colivia montată în piesele polare ale polilor de excitaţie rotorici ai motorului şi de aceea se folosesc unele metode specifice (MA) pentru limitarea şocului curentului de pornire (metoda inserării unor reactoare în fazele statorice, metoda autotransformatorului, etc)
2.2. FRÂNAREA CU MAŞINILE ELECTRICE
Motoarele electrice au un mare avantaj ca frânarea lor se poate face cu aceeaşi maşina electrica, care în prealabil a lucrat in regim de motor. Acest aspect este foarte important pentru că frânarea poate fi comandată de la distanţă utilizându-se la nevoie o anumită schemă pentru automatizarea frânarii.
Aprecierea generală a procesului de frânare a (SAE) se face cu ajutorul unor parametrii printre care cei mai principali sunt :
- eficienţa frânarii caracterizată prin valoarea momentului cuplului mediu de frânare ;
- durata frânarii, care este importantă din punctul de vedere al productivităţii (SAE) mai ales in cazul frânarilor dese ;
- unii factorii tehnico-economici cum sunt : preţul de cost al sistemului de frânare, gabaritul său, energia disipată sub formă de căldură în perioada frânarii, care toate concură cu o anumită pondere in decizia de alegere şi/sau proiectarea sistemului de frânare la o acţionare electrică.
Maşinile electrice, utilizate în cadrul (SAE) de regulă in regimul de motor, pot fi deci utilizate şi în regimul de frâna electromagnetică, care de obicei poate lucra în două sisteme de frânare:
a) în regimul de generator cu două variante :a1) frânarea in regim de generator cu recuperarea energiei ;
30

2-
a2) frânarea in regim de generator fără recuperarea energiei sau frânarea dinamică;
b) în regimul de frânare propriu-zisă cu două variante ;b1) frânare propriu-zisă cu inversarea sensului de rotaţie;b2) frânarea propriu-zisă cu inversarea tensiunii de alimentare sau frânare în contracurent.
Ar putea fi specificată si o a treia clasă de sisteme de frânare neîncadrabilă în primele două în sensul clasic şi ea se referă la o serie de metode speciale de frânare specifice mai ales (MA).
2.2.1.FRÂNAREA CU MAŞINA DE C.C.
2.2.1.1.Frânarea în regim de generator cu recuperarea energiei.
A- Maşina de c.c. cu excitaţie separată sau derivaţie. Iniţial se vor lua in considerare (SAE) cu maşini de c.c. cu excitaţia derivată şi separată. În acest caz frânarea în regim de generator cu recuperarea energiei este posibilă dacă viteza unghiulară a (SAE) depăşeşte de Ω0 pentru maşina dată. De exemplu, dacă un tren coboară la vale atunci (SAE) îşi măreşte
viteza unghiulară şi se poate ajunge la situaţia Ω>Ω0. Astfel, dacă (SAE) funcţionează pe caracteristica mecanică 1 în punctul A1 ca în fig. 2.19, atunci la creşterea vitezei, punctul de funcţionare poate ajunge în B1, în care Ω>Ω0.
Dar în această situaţie tensiunea contraelectromotoare este E= kΩф>U şi deci ea va fi aceea care va impune sensul curentului de sarcină prin maşină. Iniţial când maşina electrică lucra în regimul de motor sensul curentului I era dinspre reţea către (ME), iar acum el devine invers : dinspre maşină către reţea. Deci momentul cuplului electromagnetic îşi schimbă şi el semnul (M=kф(-I)), adică devine un cuplu de frânare ;viteza unghiulară nu-şi schimbă semnul dar produsul (ΩM), adică puterea îşi schimbă semnul în
31
Fig.2.19. Explicativă privind frânarea cu maşinade c.c. în regim de generator cu recuperarea energiei.

2-
sensul că ea nu mai este absorbită, ci debitată de maşina electrică spre reţeaua de alimentare. Astfel deci, energia potenţială a trenului, care coboară la vale, este transformată de partea mecanică a (SAE) în energie cinetică, care apoi prin intermediul maşinii electrice este transformată în energie electromagnetică, ce se livrează reţelei de alimentare sau unui alt sistem acumulator.
Aşadar, caracteristica mecanică la frânare în regim de generator cu recuperarea energiei rămâne aceeaşi ca şi în regimul de motor al maşinii de c.c., ea este dată de relaţia :
, (2.59)
cu prelungirea ei in cadranul II al sistemului de coordonate (ΩOM), când de fapt M ia valori negative. Ea poate fi notată şi sub forma :
,
(2.60)dar atunci trebuie să se ţină seama că ea se referă la cadranul II al sistemului
(ΩOM). Dacă (SAE) este dotat şi cu posibilităţi de inversare a sensului de rotaţie, atunci caracteristicile menţionate vor fi regăsite în cadranul III, respectiv IV al sistemului (ΩOM)-figura 2.19.
În principiu, frânarea cu recuperarea energiei se poate extinde şi la viteze mai scăzute alimentând maşinile de c.c. de la sursă cu tensiunea variabilă (subnominală) astfel încât viteza unghiulară ideală de mers în gol sǎ devină Ώ’0<Ω0, iar punctul de funcţionare la frânare sa devină B2
(respectiv B’2 pentru sensul invers) pe caracteristica 2 (respectiv 3). Nişte
caracteristici de forma 2 sau 3 (fig.2.19.) se pot obţine dacă maşina de c.c. se alimentează de la o reţea trifazată prin intermediul unor mutatoare comandabile G1, G2 ce pot lucra in regim de redresor/invertor fiecare, ca în figura 2.20.
Astfel, de exemplu, în regimul de motor din cadranul I al sistemului (ΩOM) maşina de c.c. este alimentată de mutatorul G1, care funcţionează în regim de redresor, iar G2 este blocat sau lucrează în regim de invertor dar fără de curent de sarcină. Când maşina de c.c. intră in regimul de frâna (generator) recuperativă, atunci se inversează curentul său de sarcina şi în
32
Fig. 2.20. Schema pentru recuperareaenergiei la viteze mai mici.
2-
consecinţa G1 se blochează, iar G2 lucrează acum ca invertor cu curent de sarcină (provenit de la maşina de c.c.) debitând energie în reţeaua trifazată. Pentru sensul invers de rotaţie mutatoarele îşi schimbă rolurile.
B - Maşina de c.c. cu excitaţie serie.În ceea ce priveşte maşina de c.c. cu excitaţia serie regimul de frâna cu
recuperare aşa cum a fost el prezentat în cele anterioare nu este posibil pentru că de fapt caracteristicile mecanice ale regimului de motor ale maşinii sunt dispuse în totalitate în cadranul I al sistemului (ΩOM) şi nu traversează în cadranul II aşa cum se produce la celelalte tipuri de maşini. Este posibilă totuşi o soluţie practică interesantă pentru recuperarea energiei la frânarea cu maşina de c.c. cu excitaţia serie [9].In paralel cu maşina de c.c. este montat un variator de tensiune (chopper de putere) U1
care funcţionează ca un contactor static, figura 2.21.In intervalul t1 de timp când U1 conduce, maşina M este scurtcircuitată,
deci tensiunea de la bornele sale U=0, iar curentul i=i1
creşte după o lege exponen-ţială ce depin-de de cons-tanta electro-magnetică de timp a maşinii cu inductivi-
tatea totală L şi rezistenta totală R. Variaţia curentului de sarcină este dată de ecuaţia :
, (2.61)
care se obţine prin aplicarea teoremei a doua a lui Kirchhoff în conturul principal al maşinii. Dacă se ţine seama ca e=kΩф şi daca se înmulţeşte (2.61) cu i1, atunci rezulta :
, (2.62)
expresie care ne arată ca energia mecanică preluată prin frânare (kΩфi1dt) (din care se scade efectul Joule corespunzator- Ri2
1dt) în perioada t1 se converteşte în energie magnetică înmagazinată în câmpul magnetic al înfăşurărilor cu inductivitatea L.
33
Fig. 2.21.Explicativă la frânarea recuperativă la maşina de c.c. cu excitaţia serie.
2-
In perioada în care U1 este blocat, adică pentru t1<t≤tp, la bornele motorului avem tensiunea u=U2, iar curentul din maşina i=i2 scade, de asemenea, după o lege exponenţiala - figura 2.21.b. Ecuaţia tensiunilor în acest caz va fi:
, (2.63)
respectiv
. (2.64)
Din ultima relaţie rezultă că
şi deci curentul i2 va avea sensul spre sursa G2 (de exemplu, o baterie de acumulatoare) transmiţându-i energia recuperata prin frânarea sistemului. Intr-adevăr înmulţind ecuaţia (2.64) cu i2 rezultă
(2.65)
în care evident (U2i2dt) este energia ce se transmite bateriei în intervalul infinitisimal de timp dt al intervalului de timp t2.
Deci recuperarea energiei de frânare se produce cumva în doua etape: într-o etapă, se produce acumularea energiei în câmpul magnetic al inductivităţii L ; in etapa următoare, energia acumulată se descarcă pe sursa c.c.
Dacă se notează cu Im valoarea medie a curentului de sarcină (fig. 2.21b) cu a=t1/tp durata relativa de conducţie a chhopperului de putere U, atunci puterea recuperată în timpul frânării este
. (2.66)
2.2.1.2 Frânarea dinamică.
A. Maşina de c.c. cu excitaţie separată sau derivaţieVom lua în considerare, de asemenea, în primul rând o maşina de c.c.
cu excitaţia derivaţie sau separată.In frânarea dinamica (deci în regim de generator, dar fără recuperarea
energiei) denumită uneori si frânarea reostatică, se deconetează circuitul principal al maşinii (cel rotoric) de la reţeaua de alimentare şi se conec-tează pe o rezistenta oarecare R, în timp ce circuitul de excitaţie rămâne alimentat ca în faza iniţială, când maşina lucra în regimul de motor. In aceasta nouă situaţie maşina continuǎ să se rotească datorita energiei cinetice
34

2-
înmagazinate în masele aflate în mişcare de rotaţie şi pentru că are şi flux de excitaţie rezultă că maşina se găseşte în regimul unui generator de c.c. cu
excitaţia separată ce debitează pe rezistenta R. Schema este data în figura 2.22 a, iar graficele corespunzătoare în figura 2.22b.
Tensiunea de ali-mentare a maşinii la frânare este U=0, deci expresia caracteristicii de
frânare pe rezistenţa R este:
(2.70)
adică aceasta este o dreaptă, aflată în cadranul II al sistemului de coordinate (ΩOM), a cărei pantă este dictată de valoarea rezistenţei R, care se ia de regula variabilă. Aşadar, iniţial punctul de funcţionare este în A (corespunzător unei viteze unghiulare şi Mr), iar în momentul începerii frânarii se deplasează în punctul B corespunzător lui R=R1. Funcţionează pe aceasta caracteristică până în punctul C când valoarea lui R se modifică şi devine R=R2, iar punctul de funcţionare (frânare) se deplasează pe o nouă caracteristică în D, etc.(similar ca la pornirea reostatică a maşinii de c.c.).Pe o ultima caracteristica de lucru, funcţionează până la oprirea totală a (SAE), adică Ω=0.
In principiu, este posibil să se realizeze o frânare dinamică cu R=0, adică prin scurtcircuitarea bornelor A,B ale maşinii de c.c. (figura 2.22 a), atunci panta caracteristicii de frânare va fi dictata de Ra (vezi relaţia (2.70)).În aceasta situaţie însa există pericolul ca curentul de frânare să devină foarte mare şi să suprasolicite maşina din punct de vedere termic. Dacă se merge pe o astfel de idee (care nu necesită o rezistenta de frânare) este posibila o micşorare a curentului de frânare printr-o scădere corespunzătoare a fluxului de excitaţie, astfel încât t.e.m. indusă în maşină (şi care produce curentul de frânare) E să apară micşorată în perioada frânarii, dar atunci va creste intervalul de timp necesar frânarii până la oprirea totală a (SAE). Şi aceasta pentru ca în fond, din momentul în care începe frânarea se pune problema disipării pe calea electrica, după o schema oarecare, a energiei cinetice a (SAE)- JΩ2/2 -înmagazinate în masele sistemului aflate în mişcare de rotaţie. In general, interesul este acela ca frânarea sistemului aflate în mişcare de rotaţie sǎ se realizeze cat mai rapid
35
Fig. 2.22. Explicativă privind frânarea dinamică.

2-
(timpul de frânare tf sa fie cat mai mic), ori aceasta înseamnă că puterea ce trebuie disipată în unitatea de timp, trebuie sa fie cât mai mare şi deci fenomenele electromagnetice vor fi pronunţate, iar în această situaţie trebuie căutate pur şi simplu limitele superioare pentru unii parametri, care să nu conducă la deteriorarea circuitelor electrice ale (SAE)- şi aceasta mai ales în cazul frânarilor dese după care eventual se realizează reporniri al (SAE) fără pauze suficient de mari, care sa permită o răcire a maşinilor etc.
In lumina celor prezentate anterior este interesantă ideea realizării frânarii dinamice la un curent de frânare impus la o anumita valoare medie, eventual cât mai constant sau care să varieze în timp după o anumită lege. In
acest scop se poate lua în considerare o schemă de principiu din figura 2.23.Un mutator U în regim de contactor static este montat în paralel cu
rezistenţa de frânare R şi lucrează conducţie/blocare cu frecvenţă ridicată (f poate fi ordinul kHz). In circuitul rotoric al maşinii, în perioada frânarii, se înseriază o inductivitate L ;circuitul de excitaţie rămâne alimentat ca şi în cazul frânarii dinamice obişnuite. In această schemă rezistenţa de frânare R poate fi modificată continuu în limite largi ţinând seama de perioada de conducţie tu al mutatorului U, în intervalul unui timp de ciclu tc. Se poate defini un factor de comanda al contactorului static U
, (2.71)
din care se vede ca ε=1, când tu=tc, adică atunci când U se găseşte într-un permanent regim de conducţie, respectiv ε=0, când tu=0, adică atunci U rămâne permanent blocat. De aici se vede că în general ε [0,1]. Dar în aceasta idee, mutatorul U lucrând în paralel cu rezistorul R cu o frecvenţă ridicată conducţie/blocare, se poate pune problema determinării unei valori de calcul (echivalente) a rezistorului R. Astfel, observând că atunci când ε=0 (adică U este blocat), rezistorul R participă cu întreaga sa valoare în circuitul motorului, iar dacă ε=1 (adică, U este în conducţie), valoarea rezistorului R este nulă pentru rotorul maşinii, atunci rezulta imediat că
36
Fig. 2.23. Explicativă privind frânarea dinamică la curent mediu dat.
2-
Re=R(1-ε) (2.72)şi că deci, în funcţie de valoarea factorului de comandă ε, .
Inductivitatea L are rolul limitării şocului de curent la scurtcircuitarea rezistorului R ; în figura 2.23 b sunt arătate variaţiile curentului rotoric când el circulă prin rezistorul R sau prin contactorul static (CS) U. Frecvenţa contactorului static U fiind mare limitele superioare (Imax) şi inferioare (Imin) ale curentului de sarcină i sunt foarte apropiate şi practic se poate spune ca valoarea curentului de sarcină este i=Imed şi aceasta pentru un anumit ε. Modificând ε în perioada frânarii se poate obţine o anumită lege de variaţie a curentului de frânare imed=f(t) în perioada respectivă.
B. Maşina de c.c. cu excitaţie serie.In ceea ce priveşte frânarea dinamică a maşinii de c.c. cu excitaţie serie,
ea se poate realiza în principiu cu o schema similara cu cea din figura 2.22a, dar ea are specificul maşinii cu excitaţie serie; schema de principiu este redată în figura 2.24.
Un aspect este esenţial : la frânare sensul curentului de sarcină se schimbă, ori la realizarea schemei de frânare, înfăşurarea de excitaţie trebuie astfel conectată în serie cu celelalte elemente de circuit, încât sensul curentului prin ea să rămână acelaşi, pentru că astfel se demagnetizează polii de excitaţie şi maşina nu va mai putea funcţiona în regimul de generator.
În altă ordine de idei, ecuaţia de funcţionare a maşinii pentru U=0 rezultă din (1.148) şi ea este
0=(R0+R)Ia+e,respectiv
kΩф+(Ra+R)Ia=0 (2.73)Această relaţie ne arată : dacă dorim să realizăm un cuplu de frânare,
deci dacă dorim să debităm un curent Ia=I pe rezistenţa de frânare R în condiţiile în care viteza unghiulară Ω a (SAE) scade, este necesar ca R să se modifice (să scadă) în mod corespunzător.
Mai corect, în figura 2.25a se reia problema amorsării generatoarelor de c.c. autoexcitate ( vezi problema amorsării generatorului de c.c. cu excitaţie derivaţie - cap. Maşina de c.c.)
37
Fig. 2.24. Explicativă pentru frânarea dinamicăla maşina de c.c. cu excitaţie serie.
2-
In aceasta figură este trasată caracteristica E=f(I) pentru viteza unghiulară Ω1 (iniţială – adică, cea din momentul începerii frânarii) şi dreapta căderii de tensiune (R0+R)Ia. Punctul A de intersecţie a celor două caracteristici trebuie sa fie la o cota de tensiune cât mai mare astfel încât generatorul să debiteze un curent Ia suficient de mare, respectiv să se producă un cuplu de frânare Mf (M=kIaф) corespunzător de puternic. Intre timp viteza unghiulară a (SAE) scade şi ajunge, de exemplu la valoarea Ω2
pentru care caracteristica E=f(I) se intersectează cu aceeaşi dreapta a căderii de tensiune în punctul A2 - încât se mai menţin valori rezonabile ale parametrilor de frânare. Dar când viteza unghiulara devine Ω3, caracteristica E=f(I) corespunzătoare nu se mai intersectează cu dreapta căderilor de tensiune, ceea ce înseamnă că de fapt generatorul s-a dezamorsat şi maşina
nu mai realizează regimul de frână. Pentru a preîntâmpina acest efect este necesar sa fie schimbată panta dreptei căderii de tensiune prin micşorarea rezistenţei pe care debitează generatorul serie – adicǎ R’<R etc.
In figura 2.25 sunt redate caracteristicile mecanice de frânare pentru diverse valori ale rezistenţei R, punctul iniţial de frânare fiind punctul A. O schema similară cu cea din figura 2.23 poate fi aplicată şi maşinii serie pentru o frânare reglatǎ fin.
2.2.1.3. Frânarea propriu-zisă cu inversarea sensului de rotaţie.
Tipul acesta de frânare se foloseşte mai ales la instalaţii de ridicat (cu momentul static rezistent de tip potenţial). Caracteristica mecanica naturala a unui motor c.c. cu excitaţie derivaţie (separată) este data de relaţia (1.127), iar dacă în circuitul rotoric se înseriază o rezistenţă oarecare R atunci ne vom situa pe o caracteristică mecanică artificială de forma
38
Fig. 2.25. Explicative privind frânarea dinamică la maşina de c.c. cu excitaţie serie(caracteristici).
2-
(2.74)
a cărei pantă este proporţională cu (Ra+R) şi în final depinde de valoarea rezistentei de frânare R. In figura 2.26 sunt date caracteristicile mecanice ale motorului de c.c. cu excitaţie derivaţie (separată) pentru mai multe valori ale lui R.
Când R=0, ne situam pe (c.m.n.), de exemplu, în punctul A de funcţionare (pentru M=Mr).Dacă R=R1≠0 ne situăm deja pe o caracteristică
artificială reostatică (1) în punctul B de funcţionare (pentru că se admite că M=Mr=const) ;viteza unghiulară este Ω1
sau mai exact se poate afirma astfel: funcţionând pe caracteristica mecanică (1) momentul cuplului electromagnetic M nu poate echilibra momentul static rezistent Mr decât la viteza unghiulara Ω’. Dacă R=R2≠0, atunci caracteristica mecanică este (2) şi punctul de funcţionare este C- adică se obţine echilibrul cuplurilor M=Mr numai când Ω’’=0. Aceasta situaţie limită este interesantă pentru că maşina nu se roteşte
(nu este nici motor, nici generator pentru ca Ω ‘’=0), dar primeşte energie electromagnetică pe la bornele sale pe care nu o poate transforma decât în căldură prin efect Joule, pentru că nu dezvoltă (şi nici nu primeşte) un lucru mecanic (deoarece Ω’’= 0). Dacă rezistenţa de frânare creşte şi mai mult astfel încât R=R3 şi R3>R2, se ajunge la caracteristica mecanică (3) la care echilibrul aceloraşi cupluri M=Mr nu se mai poate realiza decât la viteza unghiulara (-Ω’’’), iar viteza unghiulara negativă înseamnă că maşina începe sa se rotească în sens invers sensului momentului cuplului electromagnetic M produs în maşină. Aceasta se poate produce când în relaţia (2.74) avem :
(2.75)
In această situaţie, maşina primeşte putere mecanică pe la arborele său (prin scăderea energiei potenţiale a greutăţii ce coboară cu ajutorul instalaţiei de ridicat), absoarbe în acelaşi timp şi putere electrică pe la bornele sale şi le transformă pe amândouă parţial în căldură prin efect Joule pe rezistenta (Ra+R). Maşina dezvoltă în acest caz un moment al cuplului electromagnetic M, care îşi păstrează acelaşi sens ca şi în regimul iniţial al maşinii :cel de
39
Fig. 2.26. Explicativă privind frânarea propriu-zisă.

2-
motor, numai că acum, sensul său fiind opus sensului vitezei unghiulare, el se manifestă ca un moment de frânare.
Astfel deci, reglând într-un fel oarecare (în trepte,continuu, etc) rezistenţa de frânare R, se poate regla în mod corespunzător viteza de coborâre a greutăţilor la instalaţiile de ridicat. Randamentul metodei este însă destul de scăzut având în vedere pierderile mari ce se produc prin efect Joule pe rezistentele (Ra+R). Dimensionarea rezistenţei de frânare R se face deci în funcţie de viteza necesară la coborârea greutăţilor şi verificând ca valoarea curentului de sarcină să nu depăşească limitele admisibile.
In figura 2.26 se prezintă la maşina de c.c. cu excitaţia derivaţie (separată) şi modalitatea de trecere de pe o caracteristica mecanica pe alta când se modifica valoarea rezistentei de frânare R. Astfel, când se trece din punctul A al (c.m.n.) pe caracteristica artificiala (1), saltul se face evident la viteza constantă adică din punctul A in A’, care este situat deja pe
caracteristica (1), apoi acest punct de funcţionare se deplasează pe noua caracteristică mecanică, în sensul micşorării vitezei unghiulare, până se stabilizează în punctul B. Trecerea pe celelalte caracteristici mecanice se face evident după aceeaşi metodologie.
In ceea ce priveşte frânarea propriu-zisa cu inversarea sensului de rotaţie la maşina de c.c. cu excitaţie serie nu apar elemente deosebite faţă de cele prezentate anterior ; în figura 2.27 sunt date graficele unei perechi de caracteristici în care caracteristica (2)
realizează frânarea cu inversarea sensului de rotire.
2.2.1.4. Frânarea în contracurent.
Ca şi în cazul frânarii dinamice, frânarea propriu-zisă cu inversarea polarităţii tensiunii de alimentare sau frânare in contracurent se foloseşte acolo unde sunt necesare frânari foarte rapide.
Pentru o maşină de c.c. cu excitaţie derivaţie (separată) metodologia tipului acesta de frânare este următoarea :
1.-se deconectează circuitul rotoric al maşinii de la sursa de c.c. şi se reconectează imediat pe aceeaşi sursă, dar cu polaritatea tensiunii inversată ;
40
Fig. 2.27. Frânarea propriu –zisă lamaşina serie.

2-
2.-circuitul de excitaţie trebuie să-şi păstreze acelaşi sens al curentului prin înfăşurare.
Prin inversarea polarităţii tensiunii de la bornele maşinii se urmăreşte inversarea sensului curentului de sarcină prin maşinǎ în vederea schimbării sensului momentului cuplului electromagnetic M, care astfel să devină moment de frânare Mf , ce trebuie să oprească (SAE) cât mai rapid. Dar prin operaţia de inversare a polarităţii tensiunii de alimentare la bornele maşinii, poate apare un curent de sarcină foarte mare, chiar cu mult mai mare decât curentul de pornire. Astfel, dacă pornind maşina de c.c. din starea de repaus avem Ip= (8...14) x In, dar în condiţiile în care se roteşte într-un sens cu o anumită viteză unghiulară şi se încearcă în acelaşi timp pornirea ei în sens invers (prin inversarea polarităţii tensiunii de alimentare la bornele motorului), este evident ca şocul curentului de pornire (în sens invers !) va fi mult mai mare în acest caz decât cel obişnuit. De altfel aceasta se poate stabili şi din ecuaţia de funcţionare a maşinii (1.123) în care însă, în aceasta situaţie t.c.e.m. E are acelaşi sens cu tensiunea de la borne, adică
U=RaIa-E ,respectiv
. (2.76)
Desigur că o astfel de valoare a curentului de sarcină duce la o solicitare termică foarte puternică a maşinii şi practic poate să o scoată din uz. De aceea pentru limitarea acestui curent la valori admisibile se înseriază, odată cu prima operaţiune a frânarii, o rezistenta de frânare R de valoare destul de ridicată în raport cu Ra. Cea de a doua condiţie la frânarea în contracurent se referă la circuitul de excitaţie al maşinii. Intr-adevăr, dacă se schimbă şi sensul curentului de excitaţie, atunci din ф avem (-ф), respectiv :
M=k(-Ia)(-ф),adică momentul M nu-şi schimbă semnul şi deci nu are loc frânarea.
Cu precizările făcute se poate scrie ecuaţia caracteristicii mecanice la frânarea în contracurent - ea este
(2.77) în care Ω0=U/kф a devenit (-Ω0) pentru că tensiunea U a
41
Fig. 2.28. Explicative privind frânarea în contracurent cu maşinile de c.c.

2-
devenit (-U) prin inversarea polarităţii sale la bornele maşinii. In figura 2.28a este trasată caracteristica mecanică iniţială (1) pe care funcţionează maşina (în punctul A) până la iniţierea frânarii. Apoi saltul punctului de funcţionare se produce în B pe noua caracteristică me-canică (2) (panta sa este diferită de cea a caracteristicii (1) pentru că în rotor s-a înseriat R) şi acest punct se deplasează pe aceasta caracte-ristică, în sensul scăderii vitezei unghiulare, până în punctul C, când Ω=0. În acest moment (SAE) trebuie deconectat de la reţeaua de alimentare pentru că astfel sistemul începe să se accelereze în sens invers până se stabileşte un nou punct de funcţionare, de exemplu, în D. Dacă aceasta situaţie din urma (accelerarea în sens invers) nu este dorită, atunci este necesar un releu de zero, care sǎ controleze permanent viteza (SAE) în perioada frânarii şi care pentru Ω=0 ( în punctul C) sǎ emită un semnal, care sǎ conducă la deconectarea (SAE) de la sursa de alimentare.
Un sistem de grafice, similar cu cel din figura 2.28a, este dat pentru o maşina de c.c. cu excitaţie serie în figura 2.28b cu precizarea că nu apar aspecte deosebite în afară de alura propriu-zisa a caracteristicilor mecanice.
2.2.2.Frânarea cu maşini asincrone.2.2.2.1.Frânarea suprasincronă cu maşina asincronă.
Frânarea maşinii asincrone în regim de generator cu recuperarea energiei, denumită şi frânarea suprasincronă, se realizează când viteza maşinii Ω depăşeşte de viteza sa de sincronism şi aceasta se poate întâmpla când momentul static Mr este de tip potenţial sau are o componentă importantă de tip potenţial (coborârea trenului la vale). Astfel, dacă (MA) funcţionează în punctul A (fig. 2.29) pe caracteristica mecanică (1) şi viteza (ML) (a trenului ce coboară la vale) începe sa crească depăşind viteza de sincronism Ω1, atunci maşina asincrona intra în regimul de generator şi începe sa debiteze putere activă în reţeaua sa de alimentare.
In acest fel, punctul de funcţionare poate deveni B corespunzător unui cuplu de frânare (Mf).Este util sa se precizeze că la acest tip de frânare nu este cazul să se introducă rezistente exterioare în circuitul rotoric al maşinii pentru că în acest fel se schimbă panta caracteristicii mecanice (vezi caracteristica (2) în figura 2.29), iar viteza unghiulară ar putea deveni prea mare (punctul B1 de funcţionare) pentru sistem.
42
Fig. 2.29. Explicativă al frânarea suprasincronă cu maşina asincronă.

2-
Dezavantajul principal al acestui tip de frânare este acela ca ea nu se poate produce decât la viteze suprasincrone (de unde şi denumirea folosită) şi de aceea, pentru extinderea acestei metode, ea se asociază cu alte modalităţi de obţinere a caracteristicii mecanice artificiale la (MA), cum este : reglarea frecvenţei tensiunii de alimentare şi modificarea numărului perechilor de poli p. Astfel, dacă de exemplu, se dublează p atunci se obţine
şi maşina trece din punctul A de funcţionare al caracteristicii (1) în punctul A1 al caracteristicii (3)- figura 2.29-prin punctele C,D. In porţiunea CD a caracteristicii (3) maşina asincrona funcţionează în regim de generator, deci se recuperează energie electromagnetică (vezi şi paragraful 1.3.3.9 punctul D).
Ca încheiere mai rămâne să se precizeze, că indiferent de variantă, atâta timp cât maşina asincronă funcţionează în regim de generator, ea îşi ia putere reactivă (necesară magnetizării circuitului său magnetic) tot din reţeaua la care este racordată pentru că o alta sursă de putere reactivă nu există în mod obişnuit în cadrul schemelor de frânare.
2.2.2.2. Frânarea propriu-zisă cu maşina asincronă.
Frânarea propriu-zisă cu (MA) poate fi realizată în cele doua variante ale sale : cu inversarea sensului de rotaţie şi cu schimbarea a doua faze de alimentare sau în contracurent, dar în ambele variante nu se poate folosi decât maşina asincronă cu inele, pentru că trebuie introduse rezistenţe de frânare în circuitul rotoric al motorului. Graficele pentru frânarea propriu-zisă cu inversarea sensului de rotaţie sunt prezentate in figura 2.31a şi discutarea lor este similară cu cea corespunzătoare maşinii de c.c. cu excitaţia derivaţie (separată) (este modificată întrucâtva doar alura caracteristicilor mecanice) şi ea nu va fi reluată aici. Graficele pentru frânarea în contracurent cu maşini asincrone sunt prezentate in figura 2.30 b şi discutarea lor este, de asemenea, similară cu cea pentru maşina de c.c. cu excitaţia derivaţie (separată) şi tot la fel nu va fi reluată aici.
Dar sunt de remarcat totuşi câteva aspecte specifice maşinii asincronice ce se găseşte în regimul de frânare propriu-zisă :
1) - în cazul frânarii propriu-zise cu inversarea sensului de rotaţie alunecarea maşinii asincrone este
; (2.78)
2) - în cazul frânarii în contracurent alunecarea maşinii asincrone este
; (2.79)
43

2-
3)- deci in regimul de frânare propriu-zise cu maşina asincrona, alunecarea acesteia are valori mari (2-s) (în care s este alunecarea maşinii la funcţionarea sa normală), de aceea t.e.m. indusa în rotor în perioada frânarii va fi mare
E2s= sfE2 (2.80)(E2 este t.e m. indusa în momentul pornirii când s=1), chiar mai mare decât
în momentul pornirii şi în concluzie trebuie acordata o atenţie mai deosebită pentru izolaţia înfăşurării rotorice şi a inelelor colectoare la o astfel de maşina asincrona;
4) - rezistenţa de frânare poate fi determinată din relaţia simplificată (sau nesimplificată) a lui Kloss, admiţând o anumită valoare Mf pentru momentul cuplului electromagnetic de frânare
(2.80)
în care s este alunecarea maşinii asincrone când aceasta funcţionează în regimul de motor şi are sarcina M=Mr, iar scf este alunecarea critică la frânare; dacă se ţine seama de expresia alunecării din (1.177), atunci se poate nota :
respectiv
(2.81)
în care sc este alunecarea critică a motorului asincron utilizat când rezistenta unei faze rotorice este R2n; luând in considerare (2.81) expresia lui Kloss din (2.80) devine :
(2.82)
44
Fig. 2.30. Explicative la frânari propriu-zise cu maşina asincronă.
2-
în care s-au folosit şi notaţiile kf= Mf/Mn şi = Mc/Mn, iar dacă se admite şi notaţia r =R/R2 (se înţelege ca R2 este de fapt R2n !), atunci (2.82) se poate nota în mărimi adimensionale
(2.83)
din care se determină imediat r (respectiv R) fiind precizate toate mărimile.
2.2.2.3. Frânarea dinamică cu maşina asincronă
La frânarea dinamică maşina asincronă trebuie să fie deconectată de la reţeaua trifazată de c.a., dar în acelaşi timp trebuie să continue funcţionarea în regim de generator debitând pe o rezistenţă oarecare de frânare R (deci nu se produce recuperarea energiei) pentru a disipa pe cale electromagnetică energia cinetică înmagazinată în masele (SAE) aflate în mişcare de rotaţie. Pentru a debita putere electrică pe o rezistenţă de frânare oarecare R, maşina asincronă trebuie să fie cu inele, iar ca să lucreze în regim de generator, în perioada frânarii sale, este necesar să se realizeze într-un fel oarecare magnetizarea (la un anumit nivel) a circuitului
său magnetic, ceea ce de regulă se face în c.c. În figura 2.31 este dată schema de principiu pentru frânarea dinamică cu maşina asincronă.
Când începe frânarea se deschide Q1, iar Q2 şi Q3 se închid alimentând (prin intermediul transformatorului T şi a redresorului G) două faze statorice ale maşinii asincrone, în condiţiile în care în circuitul rotoric al maşinii este introdusă o rezistenţă trifazată R de frânare ce poate fi reglabilă (în trepte sau continuu).
Maşina continuă să se rotească (datorită inerţiei mecanice) cu rotorul său într-un câmp magnetic fix produs de sursa de c.c. G. În acest fel deci maşina lucrează ca un generator ce debitează pe rezistenţa de frânare rotorică R. Graficele caracteristicilor mecanice de frânare pentru acest caz al frânarii dinamice sunt similare cu cele din figura 2.22 b (caracteristicile mecanice au însă alura celor ce corespund motorului asincron). In principiu rezistenţa de frânare R poate fi şi nulă (R= 0), adică (MA) poate fi cu rotorul în scurtcircuit, în acest caz curentul de frânare poate atinge valori mari şi deci se poate ajunge la suprasolicitarea termică a maşinii.
45
Fig. 2.31. Schema de principiu pentru frânarea dinamică cu
maşina asincronă .
2-
După oprirea (SAE) se deconectează Q2 şi Q3.În raport cu frânarea în contracurent, această variantă de frânare a
maşinii asincrone are dezavantajul că este necesară o sursa de c.c, iar cuplul de frânare scade la viteze mici. În schimb pierderile sunt mai mici în cazul frânarii dinamice, nu există pericolul revărsării nedorite (nu este necesar nici releu de zero), iar posibilitatea reglajului efectului de frânare (eventual şi prin reglaj de c.c. de excitaţie) este mai mare. Ca şi la acţionările de c.c. tipul de frânare dinamică cu maşina asincronă se foloseşte la (SAE) la care trebuie realizate frânari rapide.
În ceea ce priveşte modalităţile de racordare a fazelor înfăşurării statorice a maşinii asincrone la sursa de c.c. În tabela 2.2 se prezintă variantele cele mai folosite în practica, precizându-se şi anumiţi parametri specifici [9].
Comportarea maşinii asincrone când aceasta funcţionează în regimul de frânare dinamica se face echivalându-o cu regimul său de motor. În acest scop se admite că înfăşurarea statorică a maşinii ar fi parcursă de un sistem trifazat de curenţi cu valoarea efectivă I1, care produc aceeaşi solenaţie ca şi c.c. de valoare I. De exemplu, pentru varianta I de conexiuni a înfăşurării statorice se poate nota admiţând că w1 este numărul de spire pe o fază rotorică :
2.2.2.4.Unele frânări speciale realizate cu maşina asincronă.
2.2.2.4.1.Frânarea prin alimentarea asimetrică
Asimetria tensiunii de alimentare a maşinii asincrone se poate realiza prin introducerea unei rezistenţe, a unei reactante pe o fază statornică sau prin folosirea autotransformatoarelor monofazate. În acest fel la bornele maşinii apare un sistem trifazat nesimetric de tensiuni ce se poate descompune însă în trei sisteme trifazate simetrice de tensiuni: de succesiune directă (d), de succesiune inversă (i), respectiv de succesiune homopolară (h). Se admite că componenta de succesiune homopolară este nesemnificativă, atunci sistemul trifazat simetric de tensiuni de
secvenţă directă produce un câmp magnetic învârtitor de sens direct, respectiv un cuplu de sens direct Md în maşina asincronă, iar sistemul invers
46
Fig. 2.33. Schema de principiupentru alimentarea asimetrică.
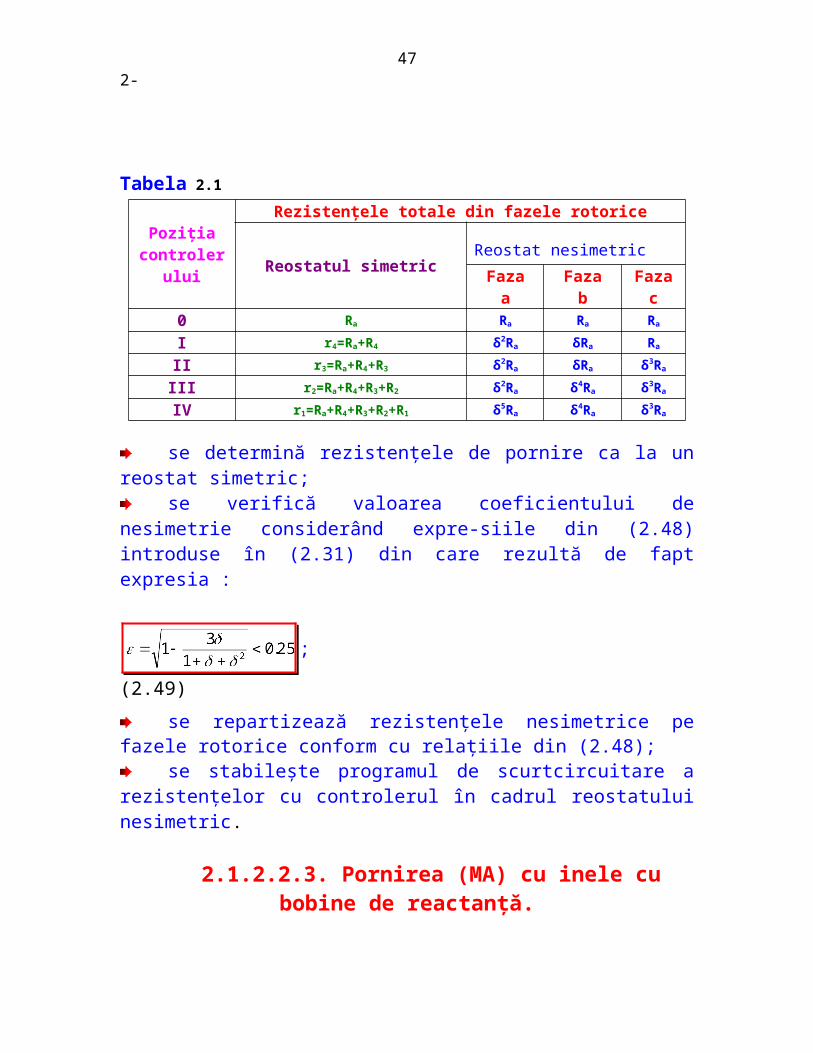
2-
de tensiuni produce un cuplu de sens invers Mi. Este evident că cuplul rezultant din maşină va fi egal cu suma algebrică a celor două componente de cuplu şi dacă această rezultantă va fi negativă (în raport cu o succesiune directă), atunci desigur că acesta va fi un cuplu de frânare (este posibil ca o porţiune a curbei rezultante să fie negativă - M= Mf, iar o altă porţiune să fie pozitivă -M= Mmotor).
În figura 2.33 este prezentată o alimentare asimetrică a înfăşurării statorice a maşinii asincrone cu ajutorul unui autotransformator.
Pornind de la schemele - maşinii asincrone [2] pentru parametri succesiunii directe, respectiv inverse se pot determina impedanţele de secvenţă directă Zd(s) şi inversă Zi(2-s) şi curenţii corespunzători Id(s), Ii(s). Dar uneori este mai comod să se construiască diagrama cercului-figura 2.34- pentru parametri de componenta directă (admiţând că Ud=Un), respectiv pentru parametri de secvenţă inversă (admiţând că Ui=Un), având în vedere faptul că din diagramă se pot determina direct valorile de timpul I(s) şi M(s).
Trebuie să se ţină seama că dacă Ud,Ui≠Un, atunci trebuie recalculate valorile curenţilor şi a cuplurilor ;
(2.97)
respectiv
(2.98)
Se reaminteşte că pentru secvenţa directă alunecarea este ;
, (2.99)
47
Fig. 2.34. Diagrama cercului pentru stabilireaparametrilor la alimentarea nesimetrică.

2-
iar pentru secvenţa inversă este :
(2.100)
Valorile curenţilor de secvenţă directă, respectiv inversă, pe fazele b şi c se pot găsi rotind cu 1200 I1d (în sens direct) şi I1i (în sens invers).
2.2.2.4.4. Frânarea cu doi curenţi.
In final tipul acesta de frânare reprezintă o combinaţie între o frânare în contracurent şi una dinamică. In figura 2.39 a şi b se dau două variante de schemă cu doi curenţi.
Frânarea începe din momentul în care se deschide contractorul Kl şi se închide contractorul K2. In schema din
figura 2.39 a sunt introduse în circuitul statoric prin închiderea lui K2 două rezistenţe (impedanţe) R1, R2 (pentru limitarea curentului de frânare), iar pe o fază o componentă de c.c. (prin dioda V), în timp ce în varianta din figura 2.39 b pe o fază se introduce o rezistenţă (impedanţă) R, iar pe celelalte două faze diodele V1, V2 în montaj antiparalel (realizând o componentă de c.c. mai puternică). In ambele scheme însă odată cu închiderea lui K2 se inversează două faze (polarităţi) la bornele motorului - este vorba deci şi de o frânare în contracurent. In figura 2.39 c se dau caracteristicile ce trebuie luate în considerare: (1) este caracteristica iniţială pe care funcţionează (MA); (2) este caracteristica specifică frânării dinamice; (3) este caracteristica specifică frânării în contracurent; (4) este caracteristica mecanică de frânare, obţinută prin sumarea caracteristicilor (2) şi (3); por-ţiunea specifică frânării este cea îngroşată. Dacă maşina nu este deconectată de la reţea în punctul A (deci problema releului de zero), atunci ea începe să se accelereze în sens invers deşi viteza sa nu va mai atinge decât circa 8...5% din viteza nominală.
48
Fig. 2.38. Explicativă la frânareaprin inversarea unei faze.
2-
In comparaţie cu frânarea dinamică tipul acesta de frânare este mai eficace şi ea se aplică în general la (MA) de putere medie.
* * *Se mai cunosc şi alte scheme speciale de frânare cu maşină
asincronă. Astfel, există varianta în regim de generator asincron autoexcitat; maşina asincronă se deconectează de la reţeaua de alimentare şi înfăşurarea sa statorică se conectează pe o baterie de condensatoare (conexiunea stea). Bateria de condensatoare îi asigură maşinii putere reactivă necesară magnetizării circuitului său magnetic, maşina continuă să se rotească datorită inerţiei mecanice şi deci se găseşte în regim de generator asincron autoexcitat ce debitează pe rezistenţa legată în paralel cu conden-satorul (frânare fără recuperarea energiei).O altă variantă este aceea cu faze statorice în paralel (frânare tip AEG); în timpul frânării statorul fiind conectat în triunghi, două dintre fazele sale nu-şi modifică legăturile cu reţeaua, dar a treia fază se leagă cu polaritatea inversată în paralel cu una din primele două (în circuitul rotoric se înseriază o rezistenţă trifazată). Se arată că şi în acest caz componentele, directă, inversă şi homopolară sunt egale între ele şi mai mici cu decât tensiunea de alimentare [2] . Dacă cuplul homopolar se evită prin legarea rotorului în stea, atunci componenta directă şi inversă devin egale cu o treime din cuplul nominal. Deci din punct de vedere al cuplurilor, varianta AEG de frânare nu aduce elemente noi faţă de frânarea "în monofazat" cu maşina asincronă.
2.2.3. Frânarea cu maşina sincronă
In principiu, toate variantele clasice de frânare se pot folosi şi la frânarea maşinii sincrone, dar apar unele aspecte practice:
1) Frânarea cu recuperarea energiei, la alimentare cu frecvenţă constantă nu este posibilă, pentru că pe de o parte viteza maşinii se modifică, ceea ce conduce la modificarea
49
Fig. 2.39 Explicative la frânarea cu doi curenţi.
Fig. 2.40. Explicativă la frânarea dinamică a maşinii sincrone.

2-
frecvenţei t.e.m induse în perioada frânării - ori frecvenţa tensiunii reţelei de alimentare este fixă. Dacă însă maşina sincronă se alimentează prin intermediul convertoarelor statice de frecvenţă (utilizate în mod curent pentru reglajul turaţiei maşinii sincrone când lucrează în regim de motor), atunci acestea pot realiza acordarea frecvenţei t.e.m. produse în perioada de frânare cu frecvenţa reţelei şi deci maşina sincronă poate debita pe reţea recuperând energia de frânare.
2) Frânarea dinamică este posibilă şi se foloseşte în mod curent în practică. Înfăşurarea statorică a maşinii se deconectează de la reţeaua de alimentare şi se reconectează pe o rezistenţă trifazată în timp ce înfăşurarea de excitaţie rămâne alimentată pe sursă de c.c. Schema de principiu pentru frânarea dinamică a maşinii sincrone este dată în figura 2.40 a. Pentru o maşină sincronă cu poli înecaţi cuplul de frânare se poate calcula după următoarea metodologie [3, 9]. Dacă se neglijează rezistenţa înfăşurării statorice, iar X este reactanţa sincronă a fazei atunci din schema echivalentă (fig. 2.40 b) pentru U = 0, rezultă
. (2.111) La frânare, viteza se micşorează şi atunci parametri E şi X se reduc şi ei în raportul deci din (2.111) rezultă
, (2.112)
ceea ce se poate nota sub forma
(2.113)
în care s-a admis că este fazorul de referinţă. Din (2.113) rezultă componenta activă a curentului de sarcină .
(2.114)
în care s-e făcut notaţia pentru viteza relativă. Dacă relaţia (2.114) se derivează în raport cu ν şi se egalează cu zero rezultă valoarea maximă (critică) pentru ; această valoare introdusă în (2.114) dă valoarea maximă (critică) pentru componenta activă a curentului de sarcină -
. Cu aceste precizări relaţia (2 .114) se poate nota sub forma
, (2.115)
50
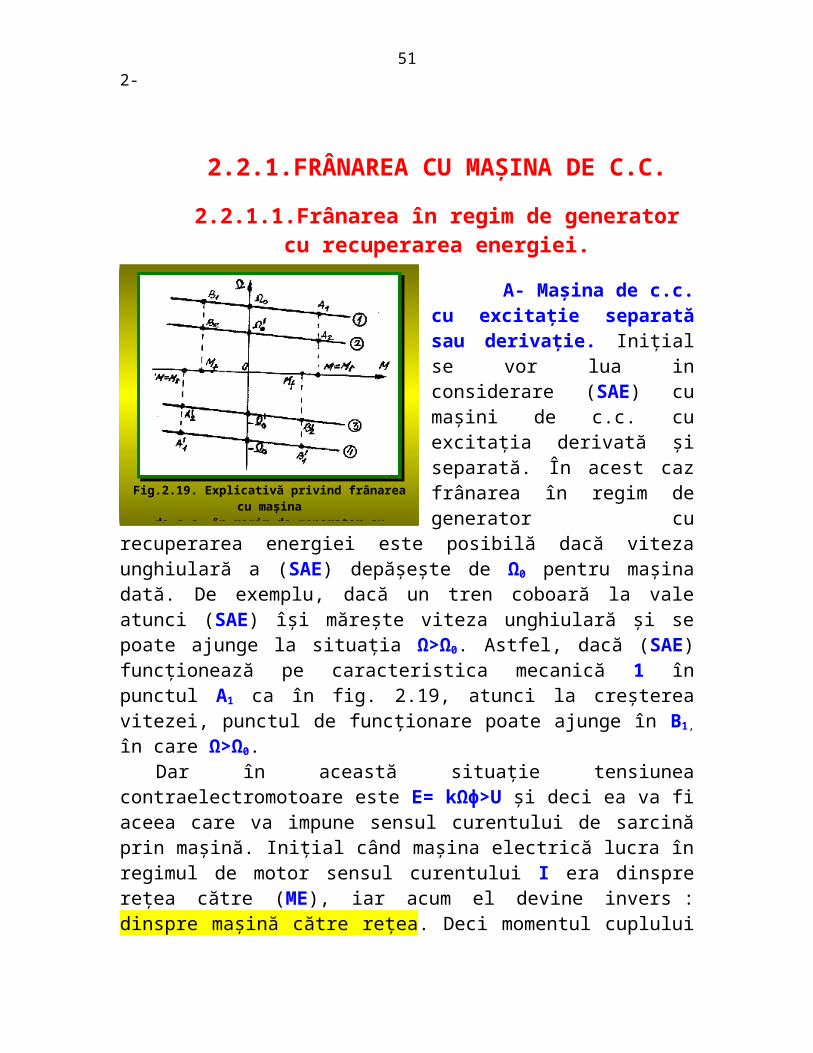
2-
respectiv pentru cuplu se poate nota
, (2.116)
în care s-a ţinut seama de faptul că şi . În acest fel caracteristicile mecanice de frânare M=f( ) sunt similare cu cele corespunzătoare maşinii asincrone aflate în regim de frânare dinamică. Momentul de frânare al maşinii sincrone va depinde astfel de viteza relativă şi de valoarea rezistenţei de frânare Rf.
3) Principial la maşina sincronă se poate folosi şi frânarea în contracurent însă apar următoarele aspecte, care fac ca metoda să nu fie folosită în practică:
- şocul mare de curent ce se produce la inversarea fazelor de alimentare;- factor de putere scăzut şi complicaţii destul de mari pentru schema de
comandă.4) Frânarea propriu-zisă cu inversarea sensului de rotaţie nu
este posibilă la maşina sincronă.
2.3. MODIFICAREA VITEZEI MOTOARELOR ELECTRICE
2 .3.1. Modificarea vitezei la motoarele de c.c.Pentru a discuta posibilităţile de modificare a vitezei la motoarele
de c.c. putem să ne referim la relaţia de baza a vitezei unghiulare din (1.125) sau (1.127). Din aceste relaţii rezultă că modificarea vitezei la (ME) de c.c. se poate face prin:
modificarea rezistenţei circuitului rotoric al motorului;modificarea fluxului principal de excitaţie;modificarea tensiunii de alimentare a motorului.
2.3.1.1. Modificarea vitezei prin modificarea rezistenţei totale rotorice.
Modificarea rezistenţei totale a circuitului rotoric la un motor de c.c. se poate realiza în două feluri:
înseriind rezistenţe exterioare în circuitul rotoric al maşinii;montând în derivaţie şi în serie rezistenţe reglabile.
In cazul înserierii rezistenţelor în circuitul rotoric la motoarele de c.c. cu excitaţia separată sau derivaţie, modificarea vitezei se poate urmări pe figura 2.2a şi b luând în considerare elementele paragrafului 2.1.1.2.
51

2-
Pentru motoarele de c.c. se poate urmări figura 2.4 şi explicaţiile paragrafului 2.1.1.3 . In principiu, prin înserierea rezistenţelor exterioare în circuitul rotoric al motorului se modifică panta caracteristicii mecanice şi la o sarcină data Mr scade viteza unghiulară, a maşinii.
A. Motorul de c.c. cu excitaţia separată sau derivaţie.Cum s-a precizat deja, rezistenţa rotorică totală se poate modifica
încă într-un mod şi în continuare vom prezenta cel de al doilea mod pentru că el este cel mal complex. In figura 2.41 a se dă schema corespunzătoare unui motor de c.c. cu excitaţia derivaţie (circuitul de excitaţie este astfel legat încât preia întreaga tensiune a reţelei de alimentare). Dacă U=const, atunci = const, (pentru Rr =const) şi deci pentru figura 2.41.a se pot nota următoarele relaţii de tensiuni şi curenţi:
; (a); (b)
(c) (2.117); (d)
în care =const. Ţinând seama de relaţiile (a) şi (c), respectiv (b) şi (c) rezultă :
,
iar din aceste două relaţii avem
cu această relaţie din urmă şi relaţia (d) a momentului se poate scrie în final
52
Fig 2.41.Explicative la modificarea vitezei prin modificarea rezistentei totale rotorice.

2-
, (2.118)
adică expresia caracteristicii mecanice pentru acest caz. Expresia anterioară mai poate fi notată sub forma
, (2.119)
în care s-a avut în vedere că . Această expresie din urmă pune în evidenţă mai bine faptul că atât viteza unghiulară ideală de mers în gol , cât şi panta naturală a caracteristicii mecanice pot fi modificate prin combinaţia de valori dintre Rs şi Rd. In figurile 2.41 b şi c sunt redate familiile de curbe pentru cazul când Rd=const şi Rs≠const, respectiv când Rs=const şi Rd ≠const. Referitor la prima familie de caracteristici se fac observaţiile că ele sunt cuprinse între caracteristicile extreme când =0, respectiv , iar punctul de intersecţie (B sau B’, care depinde de valoarea lui ) se găseşte în cadranul II al sistemului de coordonate ( ). Astfel, avem:
(2.119’)
şi ea reprezintă caracteristica mecanică naturală pentru că în această situaţie Rd apare ca o rezistenţă independentă legată doar în derivaţie cu motorul de c.c.. Tot la fel, avem
, (2.120)
adică o dreaptă, care trece prin originea sistemului de coordonate (ΩOM) şi se situează în cadranul II şi IV. Cele două drepte (2.119’) şl (2.120) se intersectează într-un punct B dispus în cadranul II pentru că coordonatele sale sunt
(2.121)
(s-a eliminat parametrul M din ecuaţiile (2.119’) , (2.12o)), respectiv
(2.122)
(s-a eliminat parametrul Ώ) şi ele depind de rezistenţa Rd - cu cât această rezistenţă este mai mare cu atât punctul B se apropie de punctul (adică punctul de intersecţie al c.m.n. cu axa ordonatelor. Într-adevăr pentru Rd
→∞ avem şi MA=0 . Deci la familiile de caracteristici din figura 2.41 b - cele trasate cu linia plină şi linia punctată - punctele B şi B’ corespund rezistenţelor . Similar se pot analiza şi familiile de caracteristici din
53

2-
figura 2.41 c.
B. Motorul de c.c. cu excitaţie serieO schemă asemănătoare cu cea din 2.41 a se poate concepe şi
pentru motorul de c.c. cu excitaţia serie; ea este redată în figura 2.42 a. Important este că prin legarea rezistenţei Rd în derivaţie cu rotorul motorului se obţin caracteristici mecanice mult mai favorabile - figura 2.42 b- în sensul
că se elimină pericolul de ambalare al motorului la funcţionare în gol (caracteristicile intersectează axa ordonatelor sistemului ( OM)).
Ecuaţiile de tensiune şi de curenţi pentru schema din figura 2.42a sunt:
; (a); (b) (2.123)
(c)în care s-a notat . Din relaţiile (b) şi (c) rezultă
(2.123')
iar din această relaţie şi cea din (a) rezultă
.
(2.124)Dacă se admite că U=Un şi se ţine seama de relaţia (1.158) pentru viteza unghiulară limită, atunci relaţia (2.124) devine
, (1.125)
care reprezintă de fapt caracteristica electromecanică. Pentru calculul
54
Fig. 2.42 Explicativă la modificarea vitezei prin modificarea rezistenţei totale la motorul serie.

2-
caracteristicilor mecanice se acordă pentru Ia diverse valori Iak (k =1,2,...,n) care folosite în (2.123') determină şirul de valori Ik (k = l,2,...,n). Din caracteristica limită , pentru , se determină şirul de valori care introduse în (2.125) produc şirul de valori . Pe de altă parte, din relaţia
(k=1,2,...,n). (2.126)
se obţine şirul de valori pentru momentul cuplului electromagnetic, astfel încât cu perechile de valori ( ) (k=l,2,...,n) se poate trasa caracteristica mecanică artificială respectivă a motorului de c.c cu excitaţia serie. Este evident că această caracteristică artificială va depinde de valorile rezistenţelor Rd şi Rs; o familie din aceste caracteristici este trasată pentru Rs=const şi Rd const în figura 2.42 b).
C. ConcluziiCalculul treptelor rezistenţelor de reglaj se poate face după aceeaşi
metodologie ca pentru rezistenţele de pornire. De fapt niciodată nu se utilizează două reostate: unul folosit pentru pornirea motorului şi celălalt pentru reglajul vitezei motorului. Există la motor un singur reostat cu trepte de rezistenţă, care este folosit atât pentru pornirea motorului cât şi pentru reglajul de viteză. Deosebirea între un reostat, care este folosit numai pentru pornirea motorului şi unul care este folosit atât pentru pornire cât şi pentru reglaj de viteză nu este legată de valoarea sau numărul treptelor de viteză, ci mai ales prin faptul că cel de pornire este calculat pentru un regim de scurtă durată de funcţionare (el funcţionează numai în perioada pornirii), iar celălalt pentru un regim de lungă durată de funcţionare .Asta înseamnă că aceeaşi valoare de treaptă de rezistenţă pusă să funcţioneze într-un regim de lungă durată, trebuie să fie dimensionată astfel din punct de vedere termic, încât să aibă posibilitatea disipării cantităţii de energie ce se pierde pe ea prin efect Joule şi să nu-şi depăşească temperatura de o anumită valoare maxim admisibilă. Aceasta face ca gabaritul unul reostat de reglaj să fie cu mult mai mare decât a unui reostat de pornire cu acelaşi număr de trepte şi cu aceleaşi valori ale treptelor de rezistenţă.
Intr-o altă ordine de idei, alegerea tipului de modificare a vitezei prin modificarea rezistenţei totale a circuitului rotoric al motorului de c.c trebuie să ţină seama de câteva observaţii mai deosebite: metoda implică mari pierderi de energie electrică prin efect Joule, nefiind economică; prin simpla înseriere de rezistenţe în circuitul rotoric la motoarele de c.c cu excitaţia separată sau derivaţie nu se modifică viteza unghiulară ideală de mers în gol, în schimb se modifică esenţial rigiditatea a caracteristicii mecanice;
55

2-
modificarea vitezei este posibilă numai intr-un singur sens şi anume , adică este o metodă unizonală de reglaj a vitezei;
teoretic reglajul de viteză este posibil între zero şi , dar practic nu se coboară viteza sub (o,3...0,4)xΏ0 din motive de răcire a motoarelor în cazul celor autoventilate; investiţia pentru reostatul de reglaj este relativ mare datorită dimensiunilor sale de gabarit; reostatul de reglaj ocupă în amplasament o suprafaţă destul de mare; fineţea reglajului de viteză depinde de numărul treptelor de rezistenţă a reostatului, dar cu cât numărul de trepte este mai mare cu atât întregul reostat devine mai scump; cu cât viteza reglată este mai mică cu atât comutaţia maşinii de c.c este mai bună.
2.3.1.2 Modificarea vitezei prin modificarea tensiunii de alimentare.
Metoda aceasta de modificare a vitezei se va discuta pentru cele două tipuri specifice de motoare de c.c.: cu excitaţia separată, respectiv cu excitaţia serie.
A. Schimbarea tensiunii de alimentare ar implica la un motor de c.c cu excitaţia derivaţie şi schimbarea fluxului de excitaţie ceea ce complică lucrurile foarte mult, de aceea această metodă nu se aplică de regulă motoarelor cu excitaţia derivaţie.In ceea ce priveşte motorul de c.c. cu excitaţia separată, plecând de la expresia pentru viteza unghiulară
, (2.127)
se constată imediat că prin modificarea tensiunii de alimentare U se modifică valoarea vitezei unghiulare ideale de mers în gol (c= =const, pentru că se admite =const→c=kΦ=const) în timp ce panta caracteristicilor mecanice artificiale rămâne aceeaşi Ra/c2=const. Deci caracteristicile artificiale de tensiune rămân paralele cu c.m.n. figura 2.43 - ele rămân deci tot la fel de rigide ca şi c.m.n. şi produc căderi de viteze mici (aceleaşi pentru aceeaşi sarcină) pe orice caracteristică. Aşadar, această metodă de modificare a vitezei la motoare cu excitaţia separata poate fi considerată cea mai bună dacă se cunoaşte şi faptul că pierderile în acest caz sunt mici (uneori chiar neglijabile), iar gama de modificare a vitezei este 1:0,02, adică foarte largă. Dar faptul cel mai important este acela că, în
56
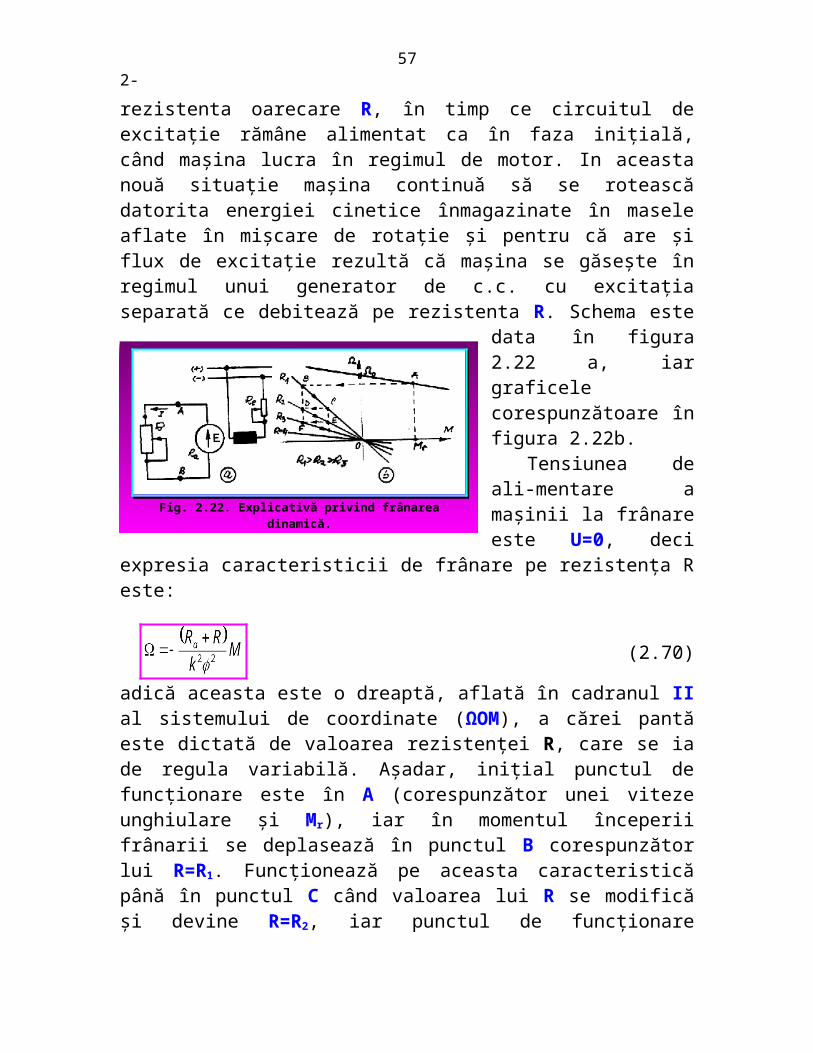
2-
anumite variante concrete de folosire, se realizează o modificare continuă de viteză pe toată gama menţionată. În cadrul acestei metode se folosesc
grupurile de (CC-ME) pentru motoare de c.c şi ele se împart în două tipuri: grupuri rotative, care se referă. la grupuri generator-motor (G-M) (sau grup Ward-Leonard),mai pu respectiv grupuri statice în care se pot include grupurile redresor-comadabil-motor de c.c. şi grupul. chopper de putere - motor dec.c.; toate aceste variante ale metodei vor fi prezentate in detaliu privind sisteme reglabile de acţionări electrice având în vedere că, în
general, aceste (SAE) sunt sisteme automatizate în circuit închis.
B. Pentru motoarele de c.c cu excitaţia serie această metodă de modificare a vitezei este economică, deşi realizarea sa practică este mai complicată şi ea nu se poate folosi decât în anumite cazuri mai speciale.
Din relaţia (2.125) pentru şi rezultă
, (2.128)
57
Fig. 2.43. Explicativă la modificarea vitezei prinmodificarea tensiunii.

2-
relaţia care arată că viteza se modifică ceva mai mult decât proporţional cu tensiunea. Din (2.128) se poate determina caracteristica dacă se cunoaşte caracteristica electromecanică naturală , aşa cum se arată
în
figura 2.44 b. Modificarea tensiunii se poate face continuu dacă motorul se alimentează de exemplu, de la un redresor comandabil (deci este în situaţia unui grup (CC- ME)) sau în trepte. Varianta cu modificarea tensiunii în trepte devine interesantă când acţionarea se face cu două sau patru (ME) identice, prin legarea acestora în serie-paralel. In figura 2.44 a este prezentată o succesiune de scheme cu două (ME) cu excitaţie serie care se leagă în serie şi în paralel, în care intervine şi o rezistenţă exterioară R (eventual reglabilă). De altfel rolul rezistenţei R este şi acela de a micşora, până la o valoare convenabilă, şocul curentului de pornire (deci pornirea se va face totdeauna cu cele două motoare în serie şi in serie cu R); de obicei o singură treaptă de rezistenţă exterioară este suficientă.
Când motoarele sunt legate în serie cu R=0, atunci rezultă că fiecărui motor îi revine o tensiune Un/2 (motoarele sunt identice) şi atunci conform cu relaţia (2.125) în care rezultă :
(2.129)
relaţia care ne arată. că viteza s-a micşorat aproape la jumătate în raport cu ultima schemă din 2.44 a, când cele două motoare sunt în paralel şi cu rezistenţa exterioară nulă - în acest caz avem :
(2.130)
Varianta aceasta de modificare în trepte a vitezei se foloseşte mai ales la electrocare, electrostivuitoare acţionate cu două sau patru motoare.
58
Fig. 2.44 Explicativă la modificarea vitezei la motoare serie

2-
Alimentarea motoarelor se face în acest caz de la o baterie de acumulatoare şi treptele convenabile de tensiune se pot realiza şi prin combinarea legării elementelor bateriei de acumulatoare în serie-paralel.
Metoda impulsurilor cu choppere de putere se foloseşte şi la motoare cu excitaţia serie.Din cele prezentate până acum se constată că modificarea vitezei se face prin modificarea tensiunii de alimentare în sensul micşorării sale plecând de la Un
şi deci modificarea vitezei este, de asemenea, unizonală, în sensul micşorării vitezei plecând de la valorile sale nominale (la sarcină nominală).
2.3.1.3. Modificarea vitezei prin slăbirea fluxului de excitaţie
A. La motoarele de c.c cu excitaţie separată sau derivaţie modificarea fluxului de excitaţie se face prin modificarea curentului de excitaţie şi această modificare trebuie înţeleasă în sensul micşorării curentului de excitaţie, pornind de la valoarea nominală a acestuia, pentru că o creştere peste Ien va suprasolicita termic înfăşurarea de excitaţie a motorului. Pornind deci de la expresia generală a vitezei unghiulare din (2.127) pentru tipul dat de motoare în care c=kφ şi ţinând seama de sensul posibil al modificării lui φ , rezultă că caracteristicile mecanice artificiale de câmp vor fi situate deasupra c.m.n. - figura 2.45, nu vor avea aceeaşi pantă şi nici aceeaşi viteză unghiulară ideală de mers în gol. În acest fel se obţin în general, viteze unghiulare supranominale (deci din nou reglaj unizonal) şi se pot obţine rapoarte de viteze pană la 2:1, iar în cazuri speciale (maşini de construcţie specială) şi rapoarte de 3:1. Limita superioară a vitezei este condiţionată mai ales de înrăutăţirea comutaţiei (posibilitatea producerii cercului de foc la
59
Fig. 2.45 Explicativă la modificarea vitezeiprin slăbirea fluxului.

2-
colector),de forţele mecanice ce apar în maşină şi de creşterea pronunţată a pantei caracteristicilor (adică de creşterea căderilor de viteză odată cu scăderea fluxului la o sarcină dată).
Dar modificarea vitezei, la valori supranominale, prin modificarea fluxului este condiţionată de încă un element. Astfel, pornind de la expresia caracteristicii electromecanice din (1.125), se poate nota considerând curentul de sarcină Ia= const :
adică , (2.131)
respectiv
sau . (2.132)
Pe de altă parte, pentru momentul cuplului electromagnetic avem :
(2.133)
şi cum Pn nu poate fi depăşită, rezultă că = const. Dar produsul =const în sistemul de coordonate ( ) reprezintă o hiperbolă
echilateră (vezi figure 2.45), care limitează (la nivelul lui Pn) valoarea lui Mx
când se lucrează cu o anume viteză unghiulară sau invers.Metoda aceasta de modificarea a vitezei la motoarele de c.c. cu
excitaţia separată sau derivaţie se foloseşte când se urmăreşte obţinerea de viteze supranominale, dar ea se combină mai ales cu metoda modificării tensiunii de alimentare (acţionarea laminoarelor, rabotezelor etc.) când se obţine o gamă de modificare a vitezei foarte largă. Această metodă este destul de economică pentru că se face prin modificarea curentului de excitaţie cu reostatul de reglaj (gabarit relativ mic, cost mic, pierderi prin efect Joule relativ mici), iar valoarea curentului de excitaţie, de regulă, nu depăşeşte de 10% din valoarea nominală a curentului de sarcină. Dar în cazul motorului cu excitaţia separată alimentarea circuitului de excitaţie se poate face cu ajutorul unui redresor comandabil şi atunci varianta aceasta
60
Fig.2.46 Explicativă la modificareavitezei la motoare serie.

2-
poate fi inclusă într-o schemă de automatizare cu circuit închis. La viteze relativ mari trebuie sa fim atenţi la comutatia masinii de c.c.
B. În ceea ce priveşte motoarele de c.c. cu excitaţia serie, modificarea fluxului de excitaţie se face de regulă printr-una din schemele de principiu din figura 2.46a şi b. Metoda este economică mai ales în cazul variantei din figura 2.46 b; aici un contactor static Q, lucrând la frecvenţă mare scurcircuitează (în perioada conducţiei sale) înfăşurarea de excitaţie Exs astfel încât (în medie) numai o parte din curentul rotoric Ia parcurge această înfăşurare ca şi cum o rezistenţă ar fi legată în derivaţie cu Exs. Dacă se notează :
(2.134)
atunci pentru circuitul de excitaţie se poate scrie relaţia , (2.135)în care este rezistenţa echivalentă pentru excitaţie. Din (2.135) rezultă imediat că
. (2.136)
In acest caz pentru trasarea caracteristicii se poate folosi relaţia din (2.125) în care , iar - adică
(2.137)
iar pentru trasarea caracteristicii mecanice artificiale se poate folosi aceeaşi metodologie cu cea prezentată în continuarea relaţiei (2.125). Dacă se consideră Ia=const şi se notează cu mărimi apostrofate cazul când se face slăbirea fluxului (adică atunci când a 1, respectiv a<1) şi cu mărimi neapostrofate, cazul când a=l, atunci conform cu (2.137) se poate nota
(2.138)
iar din relaţia cuplului de tipul (2.126) rezultă
. (2.139)
Dacă se neglijează căderile de tensiune (cu a 1) din (2.138), atunci din (2.138) şi (2.139), se poate nota egalitatea de rapoarte
, (2.140)
relaţia care ne arată că cuplul M scade proporţional cu slăbirea fluxului φ (pentru Ia=const), iar viteza unghiulară se va modifica aproximativ invers
61

2-
proporţional, adică se regăseşte şi în acest caz ideea că = const.
2.3.2. Modificarea vitezei la motoarele asincrone.
Dacă ne referim la expresia vitezei unghiulare a motorului asincron rezultată din relaţia de definiţie a alunecării sale, atunci se poate nota :
[rad/s]. (2.141)
Din această relaţie rezultă că modificarea vitezei la (MA) se poate realiza prin schimbarea numărului perechilor de poli p, a alunecării s, sau a frecvenţei f1 a tensiunii de alimentare. Dar metodele de modificare a vitezei (MA) sunt mult mai numeroase şi ele se mai referă la: modificarea rezistenţei sau impedanţei înseriate în circuitul rotoric al motorului; modificarea tensiunii de alimentare; alimentarea cu un sistem nesimetric de tensiuni; folosirea schemelor în cascadă (dublă alimentare); folosirea frânelor comandabile; metoda impulsurilor; cuplarea a două maşini la acelaşi arbore, cu precizarea că unele din ele se referă de fapt la modificarea alunecării s a motorului.
2.3.2.1. Modificarea vitezei prin modificarea numărului perechilor depoli.
Elementele generale ale acestei modalităţi de a obţine de fapt caracteristici mecanice artificiale la (MA) au fost prezentate în cadrul paragrafului 1.3.3.9 punctul d şi ele nu vor fi reluate aici, în schimb vor fi făcute alte precizări.
Modificarea vitezei prin modificarea lui p nu se poate realiza decât
în trepte pentru că p este un număr întreg şi metoda este specifică (MA) cu rotorul în s.c., pentru că la cel cu rotorul bobinat ar trebui făcută şi modificarea lui p2 astfel încât p1=p2, ceea ce ar complica constructiv maşina
62
Fig. 2.47. Fig. 2.48.Explicative la modificarea vitezei la motoarele asincrone
prin modificarea numărului perechilor de poli.

2-
foarte mult (mai ales rotorul). Deci referindu-ne la (MA) cu rotor în s.c. se pot prevedea următoarele variante:
statorul se prevede cu două înfăşurări trifazate discrete executate fiecare pentru un alt p - de exemplu, p1’/p2”=3/2, adică n1’/n2”=1000/1500;
statorul are o singură înfăşurare trifazată, dar pe fiecare fază înfăşurarea are două secţiuni ce se pot conecta fie în serie cu p’ = p1 poli, fie în paralel cu p” = p1/p2; în acest caz deci raportul polilor este totdeauna p’/p” = 1/2;
statorul are două înfăşurări dintre care una comutabilă şi una fixă dispuse în aceleaşi crestături sau două înfăşurări comutabile, caz în care se pot obţine trei, respectiv patru trepte de viteză.
De regulă se execută (MA) cu două trepte de viteză pentru că la mai multe trepte se complică mult schema înfăşurării statorice şi legăturile la cutia de borne.
În cazul a două trepte de viteză se face comutarea secţiunilor unei faze din conexiunea stea (figura 2.47 a) în conexiunea dublă stea (figura 2.47b), sau din conexiunea triunghi (figura 2.48 a) la conexiunea dublă stea (figura 2.48b).
In general, puterea de la arborele motorului este:P2 = P1 η = 3 U I cosφ,
63

2-
în care U şi I sunt tensiunea de alimentare pe fază, respectiv curentul de
sarcină pe fază, iar η este randamentul motorului. Pe de alta parte, curentul Ix printr-o secţiune a înfăşurării trebuie să fie constant şi în acelaşi timp limitat superior de supratempe-ratura admisibilă (pentru secţiunea respectivă a înfăşurării). În acest caz pentru conexiunile stea / dublă stea - figura 2.47a
şi b – se poate nota: (2.14)
dacă se admite că ηacosφa = ηb cosφb (indicele a şi b se referă la cele două tipuri de conexiuni din figura 2.47a şi b).
Dar cuplul electro-magnetic poate fi notat sub forma:
(2.143)
în care c = 1/2 π f1 (1-s) ≈ constant. Cu această relaţie se poate nota
şi cum py / pyy = 2, iar Py / Pyy = 1/2, rezultă că My / Myy ≈ 1 – adică prin această variantă de scheme ale înfăşurării statorice, modificarea vitezei se face la cuplu constant.
64
Fig. 2.49 Variante de conectări la cutia de bornea motorului asincron.

2-
Pentru varianta de conexiuni triunghi / dublă stea din figura 2.48a şi b se poate nota:
(2.144)
respectiv
(s-a admis ) (2.145)
în care din nou s-a ţinut seama că Deci această variantă de modificare a vitezei se face la o putere aproximativ constantă. In funcţie de (ML), motorul electric va trebui să asigure (la modificarea vitezei) fie cuplu constant, fie putere constantă, iar funcţie de aceasta se va alege una sau cealaltă variantă de scheme pentru comutare. In figura 2.49 sunt date unele modalităţi practice de efectuarea legăturilor la cutia de borne statorică a (MA) pentru modificarea vitezelor.
Metoda aceasta de modificare a vitezei unghiulare se foloseşte la unele acţionări mai deosebite cum este cazul la unele maşini unelte, utilaje de ridicat, ascensoare, turnuri de răcire cu răcire forţată, etc. Dacă modificarea vitezei se face rar, de exemplu, sezonier cum este cazul turnurilor de răcire, atunci schimbarea legăturilor se face manual la momentul cuvenit (cu motorul scos de sub tensiune), dar dacă această schimbare trebuie făcută des şi mai ales în timpul funcţionării (maşini unelte, ascensoare, etc), atunci, această operaţiune se face automat cu aparataj electric (contactoare) corespunzător.
2.3.2.2. Modificarea vitezei prin modificarea rezistenţei rotorice.
Metoda se referă numai la (MA) ca rotorul bobinat, pentru că numai la acest tip de motor, accesul la circuitul rotoric este posibil. Metodologia modificării vitezei prin modificarea în trepte a rezistenţei exterioare înseriate în rotor poate fi urmărită în figura 2.12 şi toate cele prezentate deja în cadrul paragrafului 2.1.2.2.1. Problemele legate de calculul treptelor de rezistenţă sunt şi ele rezolvate în cadrul paragrafului 2.1.2.2.2, iar tema diferenţei dintre reostatul de pornire şi cel de reglaj a fost discutată deja în cadrul paragrafului similar privind o acţionare de curent continuu (vezi paragraful 2.3.1.l.)
65

2-
Din relaţia (2.32) rezultă că alunecarea (MA) este direct proporţională cu rezistenţa rotorică a motorului şi deci prin înserierea de rezistenţe se obţin alunecări tot mai mari, respectiv viteze unghiulare tot mai
mici. Deci modificarea de viteză este subsincronă, iar reglajul de viteză este de tip unizonal. Din relaţia (1.177) rezultă că alunecarea critică sc este direct proporţională cu rezistenţa rotorică şi deci prin înserierea rezistenţelor exterioare creşte sc, respectiv creşte panta caracteristicii mecanice şi căderea de viteză pentru o sarcină dată. Având în vedere că momentul critic al motorului Mc nu depinde de rezistenţa rotorică, atunci din figura 2.50 rezultă posibilităţile de modificare maxime ale vitezei unghiulare pentru diverse sarcini M ≤ Mn - partea haşurată a figurii 2.50. Acest lucru este important mai ales în cazul când rezistenţa exterioară din circuitul rotoric al motorului poate fi modificată între 0 şi valoarea sa maximă R1 aşa cum rezultă din figura 2.51c. In figurile 2.51a şi b sunt redate două scheme de principiu pentru reglarea continuă a rezistenţei din circuitul rotoric al (MA). În prima schemă, redresorul A1 redresează curentul rotoric al (MA) şi alimentează rezistenţa Rx. Insă în paralel cu această rezistenţă, este montat un chopper de putere care scurtcircuitează Rx în intervalul de timp ta (figura 2.51 c) cât se află în conducţie, astfel încât rezistenţa exterioară se modifică între zero şi R1 cu o frecvenţă ridicată. Curentul rotoric i2 se modifică între două limite (imax şi imin) dar pentru că frecvenţa de lucru este mare (există şi inductivitatea L - bobina - de filtraj) practic i2 se poate considera constant egal cu valoarea medie I2m (corespunzătoare perioadei tc a unui ciclu de variaţie).
Se poate calcula o rezistenţă echivalentă a circuitului rotoric (pe o
66
Fig. 2.50 Fig. 2.51Explicaţiile la modificarea vitezei unui motor asincron prin modificarea rezistenţei rotorice.
2-
fază) dacă se ţine seama că în practică se ia în considerare valoarea medie a cuplului electromagnetic M, care este proporţional cu pierderile în cuprul rotoric prin efect Joule (PCu2 = sΩ1M). Deci se poate nota pentru un ciclu
respectiv
din care rezultă :
. (2.146)
Raportul ta/tc=έ reprezintă factorul de comandă al chopperului A2 şi deci relaţia anterioară poate fi notată : Re = Ra + (1 – ε) R1. (2.147)Pentru că ε se poate modifica continuu între zero şi l (ε [0,1] - pentru ε=0 rezultă ta = 0, adică A2 este blocat, iar pentru ε = 1, rezultă ta = tc adică A2 se găseşte în conducţie permanentă), se ajunge la concluzia că rezistenţa rotorică se poate modifica continuu între Ra şi (Ra+R1), adică caracteristicile mecanice ce se pot obţine sunt cuprinse între c.m.n. şi o caracteristică artificială reostatică corespunzătoare rezistenţei exterioare de valoarea R1.
Schema din figura 2.51a are însă dezavantajul că datorită redresorului A1 montat în circuitul rotoric al (MA), pot apare oscilaţii ale cuplului, care la alunecări mici pot deranja sistemul automat de reglaj, dacă schema este inclusă într-un sistem închis de reglare. Pentru eliminarea acestui defect se foloseşte schema din figura 2.51b în care nu există redresor în rotor, iar rezistenţele Rx de pe fiecare fază sunt şuntate de către două tiristoare în montaj antiparalel (sau un triac). Realizând o comandă similară cazului precedent, se obţine aceeaşi variaţie continuă a rezistenţei rotorice între valorile Ra şi (Ra + R1) unde R1 = max [Rx].
In final deci, prin aceste scheme se poate obţine o modificare continuă a vitezei (MA) între două limite ce depind şi de sarcina motorului (vezi figura 2.50), dar nu trebuie să se uite că rezistenţe introduse în circuitul rotoric al motorului (indiferent cum !) aduc pierderi suplimentare importante prin efect Joule şi că metoda în sine rămâne neeconomică, ca şi în cazul acţionărilor de c.c. Dar datorită simplităţii schemelor ea se foloseşte totuşi în cazul acţionărilor de puteri relativ mici şi care funcţionează în serviciul intermitent (S3) sau de scurtă durată.
2.3.2.3. Modificarea vitezei prin modificarea tensiunii de alimentare.
67
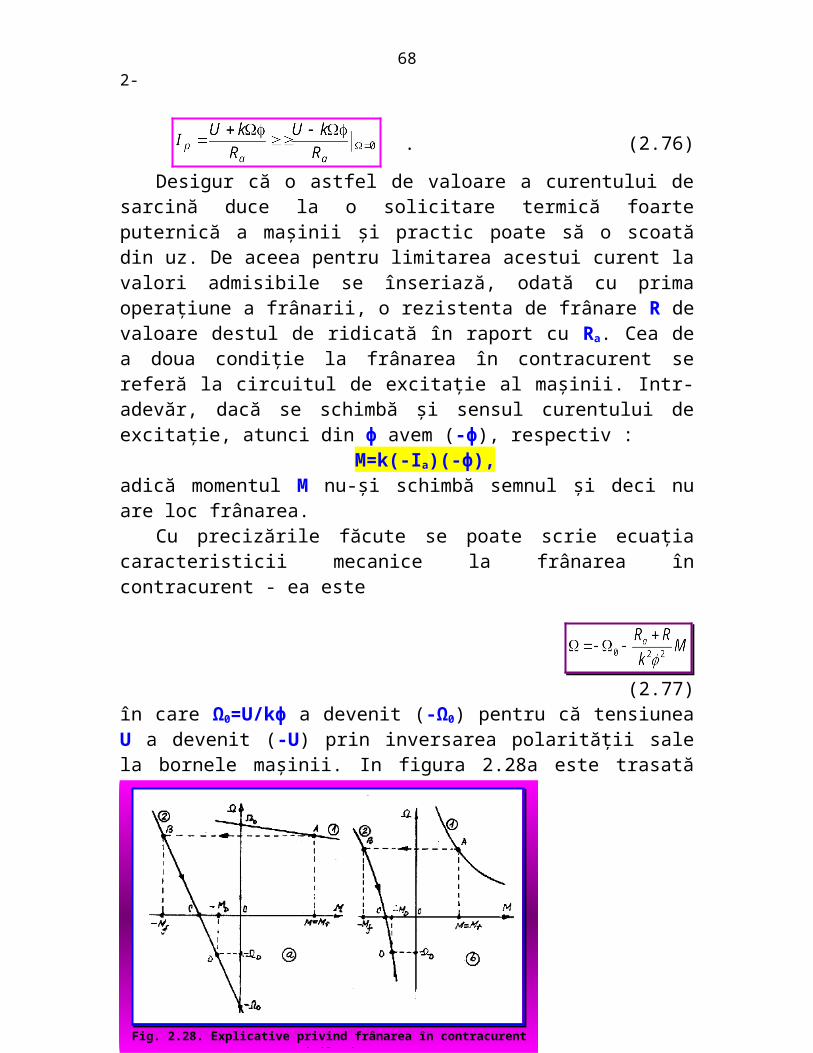
2-
Principiul obţinerii caracteristicii mecanice artificiale de tensiune la (MA) a fost prezentat în paragraful 1.3.3.9 punctul B - vezi figurile 1.68a şi b. Este ştiut că atât momentul cuplului electromagnetic M al (MA), cât şi momentul său critic Mc
depind de pătratul tensiunii de alimentare () (motorul asincron este sensibil la
căderi de tensiune !) şi atunci se pune problema, în timpul funcţionării,
acţionării: cât poate fi scăzută tensiunea astfel încât momentul maxim al (MA) Mmax=Mc să nu ajungă sub valoarea nominală a cuplului, pentru că altfel la sarcina nominală motorul se va opri. Astfel, dacă pentru U1n avem cuplul critic (maxim) Mc , iar la o tensiune U1x < U1n avem un cuplu maxim al motorului Mmax = Mcx = Mn atunci se poate nota:
(2.148)
în care λ = Mc/Mn reprezintă coeficientul de suprasarcină pentru (MA), iar ur=U1x/U1n este coeficientul de reducere al tensiunii. Din (2.148) rezultă că valoarea până la care se poate reduce tensiunea de alimentare este
respectiv
. (2.149)
Cu această ocazie alunecarea va creşte până la alunecarea critică sc (care nu depinde U1) pentru că prin scăderea tensiunii, M devine Mcx şi deci viteza limită inferioară la care se poate ajunge este: Ωli = (1 – sc) Ω1 (2.150)în ipoteza că sarcina este nominală (Mr = Mn). De altfel se poate deduce o expresie pentru viteza unghiulară a (MA) de forma Ω=f(ur, sn, λ). Într-adevăr, relaţia simplificată a lui Kloss scrisă pentru sarcina nominală este:
din care rezultă imediat . (2.151)
68
Fig. 2.52. Domeniul de modificarea vitezei prin schimbarea tensiunii.

2-
Aceeaşi relaţie a lui Kloss aplicată în condiţiile reducerii tensiunii ur, conduce la relaţia:
(2.152)
Din egalitatea relaţiilor (2.151) şi (2.152) rezultă
(2.153)
iar dacă se ţine seama de relaţia de definiţie a alunecării, atunci avem:
respectiv
. (2.154)
In figura 2.52 sunt redate curbele Ωx/ Ω1=f(ur) pentru unele valori ale alunecării nominale sn şi a coeficientului de suprasarcină λ; din aceste grafice se observă că domeniul de modificare al vitezei este restrâns. Acest domeniu se poate mări numai dacă în circuitul rotoric al motorului (deci (MA) cu rotor bobinat) se înseriază rezistenţe exterioare.
Micşorarea tensiunii de alimentare se poate realiza prin înserierea unor impedanţe pe fazele statorice sau cu ajutorul unui autotransformator trifazat reglabil, dar acestea implică pierderi suplimentare în elementele înseriate. Fără pierderi (respectiv, cu pierderi neglijabile) se pot utiliza scheme de tipul celei din figura 2.10 prezentată la pornirea (MA) în care se utilizează variator de tensiune de c.a.. A1 format din grupuri de tiristoare în montaj antiparalel (sau un triac) cu ajutorul căruia se poate modifica tensiunea de c.a. în limite largi. O schemă de principiu pentru reglarea vitezei în circuit închis bazată pe această metodă este dată în figura 2.53a.
69
Fig. 2.53. Schema pentru reglarea vitezei In circuit închis prin modificarea tensiunii.

2-
Motorul M este cuplat cu tahogeneratorul B cu ajutorul căruia se realizează reacţia inversă, tensiunea sa fiind proporţională cu viteza.
Sumatorul 1 dǎ o rezultanta intre si tensiunea de comanda ,care este proporţionala cu viteza prescrisă. Rezultanta sumatorului 1 este amplificată de către A3 şi semnalul ajunge la sumatorul 2, care dă o rezultanta ( - semnal legat de sarcina rezistivă) ce ajunge la instalaţia de comanda A2 a variatorului de tensiune de c.a. A1 ce se găseşte în circuitul de forţa al (MA). In figura 2.53 sunt date caracteristicile mecanice în doua variante : cu linie plină subţire, cele realizate prin reglaj manual (în circuit deschis) al tensiunii de alimentare, iar cele cu linie plină îngroşată în cazul circuitului închis, în care se ţine seama şi de sarcina motorului .
In ceea ce priveşte variantele posibile de montare ale dispozitivelor semiconductoare din cadrul unui variator de tensiune de c.a. în raport cu fazele înfăşurării statorice a (MA) , în figura 2.54 sunt redate unele dintre aceste variante .
70
Fig. 2.54 Variante de conexiuni pentru alimentarea cu tensiune variabila.

2-
In circuitul rotoric al (MA) sunt incluse rezistente exterioare pentru lărgirea domeniului de modificare a vitezei ; uneori o schema de acest fel se numeşte antiductor . Fiecare din schemele prezentate (în afara de cea din g) cuprind trei grupe de tiristoare legate in montaj antiparalel , iar schema f are câte un tiristor şi o dioda (pentru economie de tiristoare) în antiparalel pe fiecare faza.
In legătura cu schema din 2.34 se pot face câteva observaţii [9] :a)La schema a fiecare faza a maşinii este alimentata prin cate doua perechi de tiristoare şi deci
forma de unda a tensiunii va depinde de starea celor doua perechi de tiristoare ; nu apar armonici de ordinul trei ;
b)La schemele b si c tensiunea sursei se aplica pe fiecare faza prin intermediul a câte unei perechi de tiristoare montate în opoziţie ; în fazele maşinii apar armonici de ordinul trei si multiplu de trei; dar forma undei de tensiune este mai simpla decât la schema a ;
c)Schemele f si g sunt mai avantajoase prin numărul mai mic de tiristoare, dar ponderea armonicilor superioare este destul de mare şi de aceea se folosesc rar ;
d)Prin montarea tiristoarelor în triunghi, în stea, înfăşurări statorice - schemele d şi g - se micşorează probabilitatea unui scurtcircuit direct, dar soluţia este avantajoasa la puteri mici când este posibila montarea dispozitivelor semiconductoare direct pe motor .
Momentul cuplului electromagnetic în cazul folosirii variatorului de tensiune este o funcţie de alunecarea s a motorului şi unghiul de întârziere la aprindere al tiristoarelor α şi el poate fi exprimat , în general , sub forma
(2.155)
în care este expresia cuplului de tip relaţia simplificată a lui Kloss , iar este un factor de corecţie a cărui expresie este destul complexă . Pentru metodologia de deducere a relaţiei (2.155) şi expresia lui se poate consulta [2] .
2.3.2.4. Modificarea vitezei prin alimentarea cu un sistem nesimetric de tensiuni.
Metoda nu este prea răspândită , dar sunt numeroase scheme ce pot fi folosite în scopul modificării vitezei prin alimentarea nesimetrica a (MA). O schemă de principiu este data în figura 2.55a în care un autotransformator AT alimentează una dintre fazele înfăşurării statorice cu o tensiune nesimetrica în raport cu celelalte doua. In principiu deci, (MA) este alimentat cu un sistem trifazat nesimetric de tensiuni, care formează în maşina două câmpuri magnetice învârtitoare : unul cu sens direct (d) şi unul cu sens invers (i). Cele doua câmpuri magnetice învârtitoare produc cuplurile corespunzătoare de sens :
71
Fig. 2.55Variante pentru modificarea vitezei prin alimentarea nesimetrică.
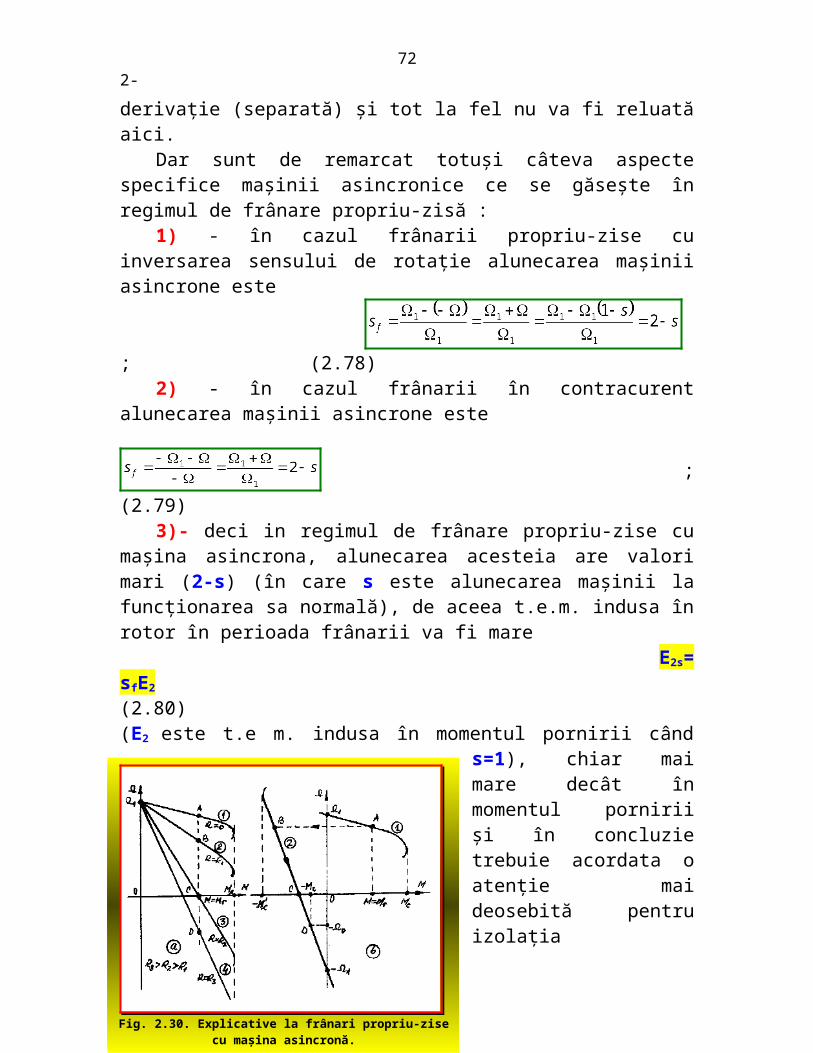
2-
(2.156)
în care sunt componentele de secvenţa directă , respectiv inversă rezultate din descompunerea sistemului trifazat nesimetric de tensiuni în componente simetrice .
Momentul rezultant va fi egal cu modulul diferenţei celor doua componente de cuplu şi deci se poate nota
(2.157)
in care este coeficientul de nesimetrie al sistemului de tensiuni de
alimentare . Relaţia (2.157) este de fapt caracteristica mecanică de tipul M=f(s) şi deci dacă se dă valoarea cuplului (pentru regimul stabilizat ), din (2.157) se poate determina valoarea alunecării s, respectiv a vitezei unghiulare a (MA) .
Alimentarea nesimetrica a (MA) se poate realiza şi cu grupurile de tiristoare legate in montaj antiparalel pe una sau doua faze statorice ale motorului, aşa cum se arată în figura 2.55b şi c .
2.3.2.5. Modificarea vitezei prin schimbarea frecvenţei tensiunii de alimentare.
Elementele de baza ale obţinerii caracteristicii mecanice artificiale prin schimbarea frecventei au fost prezentate in paragraful 1.3.3.9. punctul c. Sub raport economic acest procedeu de modificare a vitezei este cel mai bun pentru că pierderile suplimentare în maşină sunt relativ mici şi ele se datorează în primul rând sursei modificatoare de frecventa .
Din relaţia (1.178) rezultă că se poate nota pentru momentul critic
(2.158)
în care k este o constanta şi s-a ţinut seama ca , iar
se pot nota sub forma . Din (2.158) rezultă că în
72
2-
timpul schimbării frecvenţei tensiunii de alimentare raportul trebuie să
rămână constant (şi anume egal cu ) dacă se doreşte ca Mc (adică
capacitatea de supraîncărcare a motorului ) să rămână constantă, adică
ca în cadrul c.m.n.. Într-adevăr, dacă se admite U1= const , atunci din ecuaţia tensiunilor de funcţionare a (MA), neglijându-se căderile de tensiune activă ( ) şi reactivă ( ) , se poate scrie
, (2.159)
în care este evidenţiata notaţia Se vede din (2.159) ca la scăderea frecvenţei f1, fluxul Φ creşte producând suprasaturarea magnetică a maşinii, adică creşterea excesivă a curentului de magnetizare (componenta reactiva a curentului de sarcină) cu toate consecinţele sale . Daca f1 creşte peste valoarea nominală fluxul Φ va scădea sub valori nominale producând scăderea cuplului electromagnetic. Dar dacă se reuşeşte menţinerea
constantă a raportului .
, (2.160)
atunci atât Mc se menţine constant (şi anume la valoare din c.m.n.), iar fluxul magnetic Φ din întrefierul maşinii se menţine şi el constant, respectiv (MA) comandat în frecvenţă se comporta analog cu motorul de c.c. cu excitaţie separată comandat în tensiune de alimentare. De fapt, la aceasta concluzie se ajunge şi în cadrul capitolului 3, unde pentru cele doua tipuri de motoare s-a ajuns (cu ipotezele simplificatoare respective) la acelaşi sistem de ecuaţii, care descriu comportarea dinamica a acţionarilor cu motoarele respective . In fig. 2.56a se arată cum trebuie să se modifice tensiunea de alimentare la schimbarea frecventei .
Astfel, la scăderea frec-venţei sub valoarea sa nominală ( ) , tensiunea U1 trebuie sa scadă şi ea în raport cu U1n încât raportul
, aspect ce a
73
Fig. 2.56 Explicativă privind caracteristicile motorului asincron la modificarea vitezei prin modificarea frecvenţei tensiunii de alimentare.

2-
fost relevat şi justificat în cele anterioare. Dar când frecvenţa f1 ajunge la valori destul de mici, atunci valorile rezistentei R1 nu mai poate fi neglijate în raport cu reactanţele , aşa cum s-a făcut când s-a scris relaţia (2.158), pentru că la frecvenţe mici căderile de tensiune pe R1 încep să devină semnificative în raport cu căderile de tensiune reactive. Acesta este motivul pentru care spre valori mici ale lui f1, tensiunea U1 trebuie să rămână
ceva mai mare decât cea ceruta de raportul iniţial , astfel încât totuşi
Mc şi fluxul din întrefierul maşinii sǎ se menţină la aceleaşi valori .Când frecventa se schimba peste valori nominale ( ) ar urma
ca şi U1 să devină mai mare decât U1n ceea ce, de regula, nu este posibil (decât în cazul maşinii special proiectate) şi atunci tensiunea rămâne la valoarea sa maximă admisibilă, adică U1n. Dar conform cu (2.159) fluxul scade sub valori nominale şi desigur şi momentul critic Mc. Luând în considerare aceste elemente s-a trasat toata gama de caracteristici mecanice
artificiale de frecventă (în unităţi relative ) în figura 2.56b. Fără prea
mare efort se poate constata că alura lor este identică cu gama de caracteristici mecanice artificiale de tensiune şi de flux (fig. 1.53 şi fig. 1.55) reunite împreună. Ca şi acolo, şi aici se pot obţine viteze mai mici decât Ω0, respectiv mai mici decât Ω1 (subsincrone), şi viteze mai mari decât Ω0, respectiv mai mari decât Ω1 (suprasincrone) existând posibilitatea modificării vitezei pe un domeniu foarte larg de valori (la c.c. prin contribuţia a doi parametri). Desigur este necesară o sursă de tensiune alternativă la care atât frecvenţa, cât şi tensiunea să fie reglabile continuu pe domeniu cât mai larg de valori.Acestea sunt de fapt convertoarele comandabile de frecventă – tensiune şi atunci se ajunge la grupul (CC - ME), care va fi tratat (aşa cum s-a menţionat deja) într-un capitol separat.
In final mai trebuie menţionat că la frecventa cresc pierderile în fierul (MA) peste cele nominale şi trebuie avut în vedere acest fapt la încărcarea în sarcină a maşinii (dacă nu cumva maşina a fost proiectată să funcţioneze şi la frecvenţe mari). Majoritatea grupurilor (CC-ME) cu modificare de frecventă şi tensiune sunt proiectate să lucreze până la 60 Hz , iar altele chiar până la 100 Hz .
2.3.3.Modificarea vitezei la motoarele sincrone.
La motoarele sincrone o serie de metode utilizabile la (MA) pentru modificarea vitezei nu sunt posibile. Astfel, metoda rezistentelor
74

2-
înseriate în circuitul rotoric nu este posibilă principial la motorul sincron. De asemenea, modificarea tensiunii de alimentare nu este posibilă pentru că prin micşorarea tensiunii de alimentare scade cuplul maxim al motorului, dar maşina continuă să funcţioneze cu turaţia de sincronism şi când ajunge la situaţia , (MS) iese din sincronism şi se opreşte .
Modificarea vitezei prin schimbarea numărului perechilor de poli principial este posibilă, pentru că în definitiv schimbarea numărului perechilor de poli în statorul maşinii sincrone se poate face după aceleaşi scheme ca şi la (MA), dar aceeaşi modificare de număr de poli trebuie făcută simultan şi în rotorul (MS), ceea ce ar complica substanţial construcţia motorului şi de aceea în practica aceasta metodă nu este folosită (aceeaşi problema se punea şi la (MA) cu rotorul bobinat la care metoda nu se aplică, ci numai la (MA) cu colivie pentru că înfăşurarea în colivie îşi ea în mod automat numărul perechilor de poli p2 egal cu p1 - astfel încât totdeauna
). Deci, în final singura metoda de modificare a vitezei la (MS) aplicabilă în practică este cea a schimbării frecventei tensiunii de alimentare prin utilizarea unui (CC) pentru care însă apar câteva elemente legate de specificul (MS), şi care simplifică într-o măsura oarecare (CC) .
In practică se folosesc (MS) cu modificare de viteza de la puteri mici până la puteri foarte mari. La puteri mici (MS) au poli rotorici formaţi din magneţi permanenţi (pe baza de ferite, alnico sau cobalt-samarium), care reduc gabaritul şi greutatea maşinii. În schimb nu se poate controla fluxul de excitaţie al motorului, iar în timp magneţii permanenţi îmbătrânesc şi fluxul de excitaţie scade; de asemenea sunt sensibili la vibraţii (şi pot pierde magnetismul). In cazul (MS) de puteri mari şi foarte mari circuitul de excitaţie se alimentează de la redresoare comandabile şi reglarea vitezei se face în circuit închis.
75



























