Embed Size (px)
Citation preview
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 1 / 28
A Survey of Suboptimal Search Algorithms
Jordan T. Thayer and Wheeler Ruml
jtd7, ruml at cs.unh.edu
slides at: http://www.cs.unh.edu/˜jtd7/papers/
This is Search
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 2 / 28
■ initial state
■ expand
generates all successor states, implicitly computes g(n)
■ goal test
■ h(n)
estimates cost of reaching a goal
admissibility: non-overestimating
consistency: obeys triangle inequality
■ state: problem data
■ node: state, g, parent pointer
What is a duplicate?
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 3 / 28
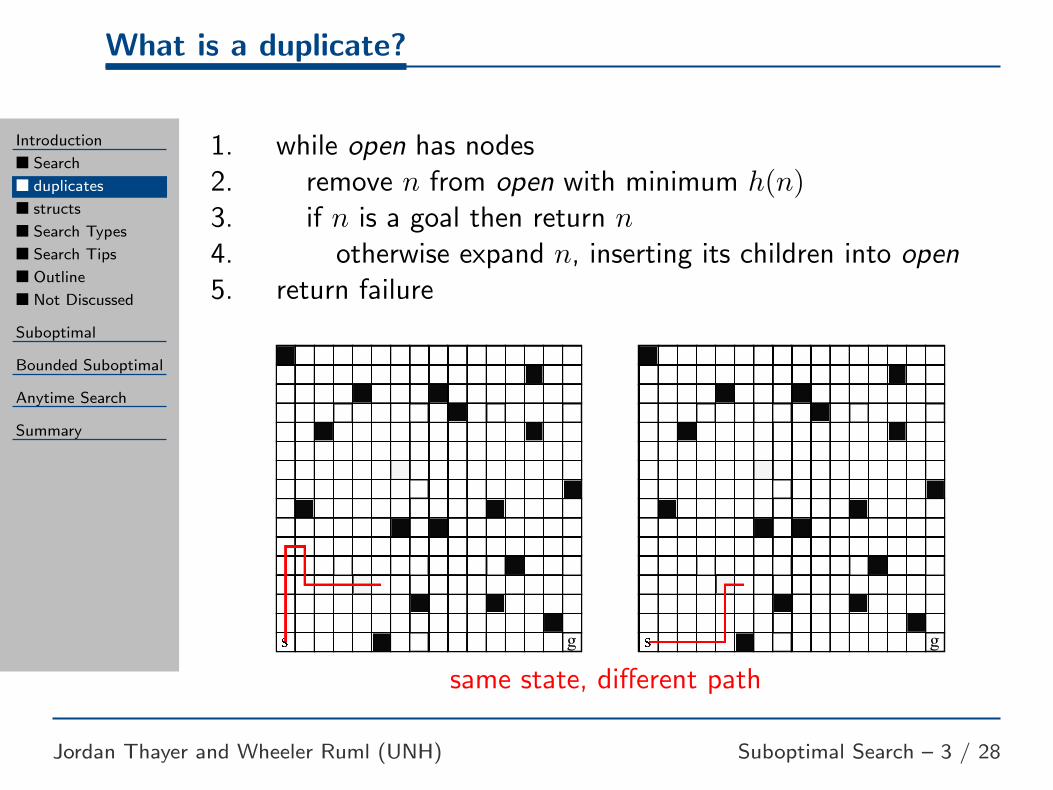
1. while open has nodes2. remove n from open with minimum h(n)3. if n is a goal then return n
4. otherwise expand n, inserting its children into open5. return failure
same state, different path
Common Data Structures
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 4 / 28
1. while open has nodes2. remove n from open with minimum h(n)3. if n is a goal then return n
4. otherwise expand n, inserting its children into open5. return failure
■ openlist:
heap: handles real costs, large ranges of values, etc
bucket list: more efficient, requires integer values
■ closed list:
hash table: in practice, also includes open nodes
Different Kinds of Search
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 5 / 28
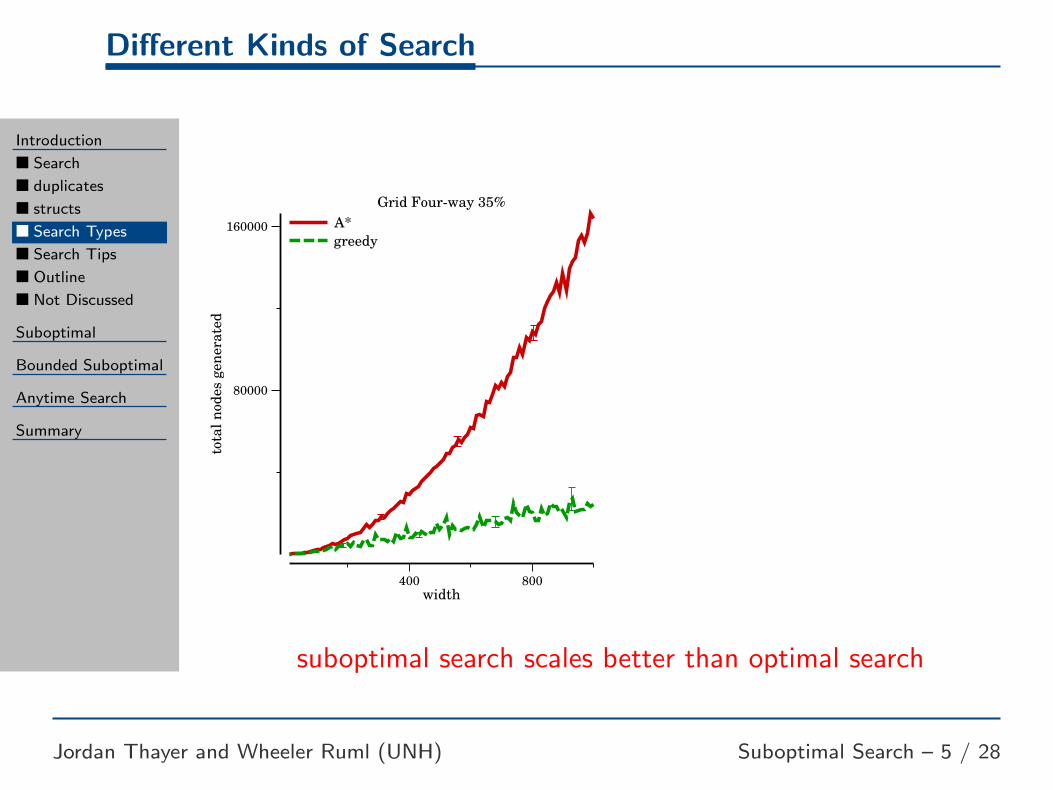
Grid Four-way 35%
width800400
total nodes generated
160000
80000
A*
greedy
suboptimal search scales better than optimal search
Different Kinds of Search
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 5 / 28
Grid Four-way 35%
width800400
total nodes generated
160000
80000
A*
greedy
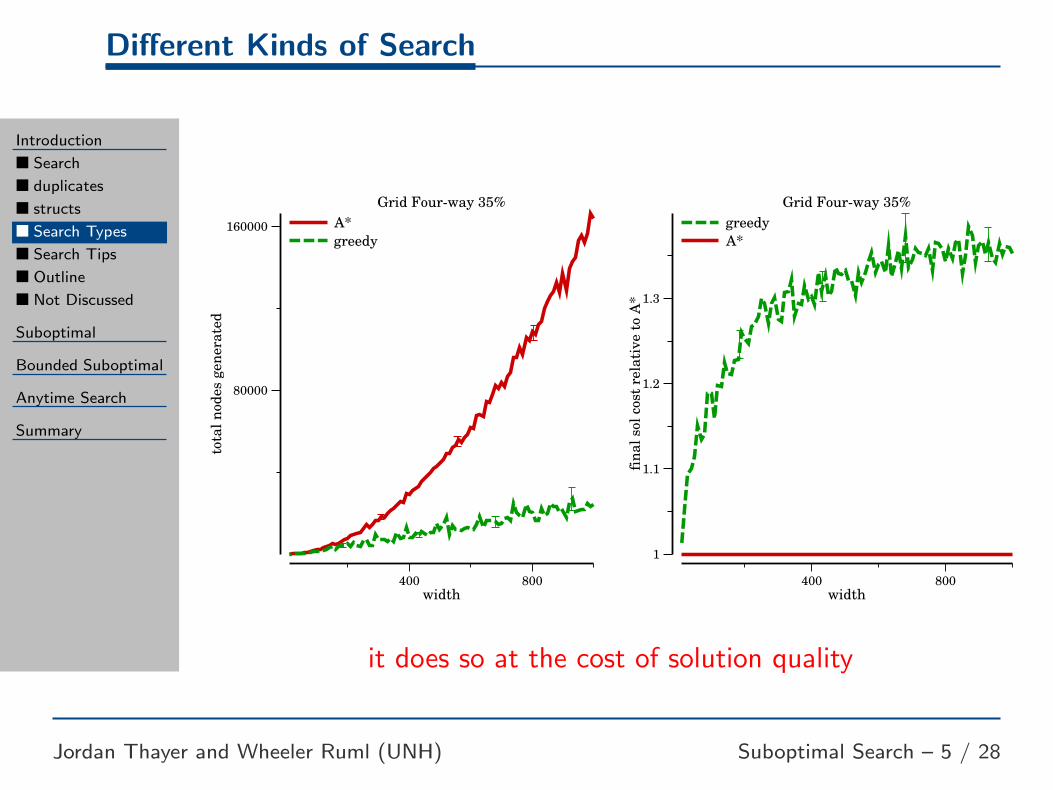
Grid Four-way 35%
width800400
final sol cost relative to A* 1.3
1.2
1.1
1
greedy
A*
it does so at the cost of solution quality
Different Kinds of Search
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 5 / 28
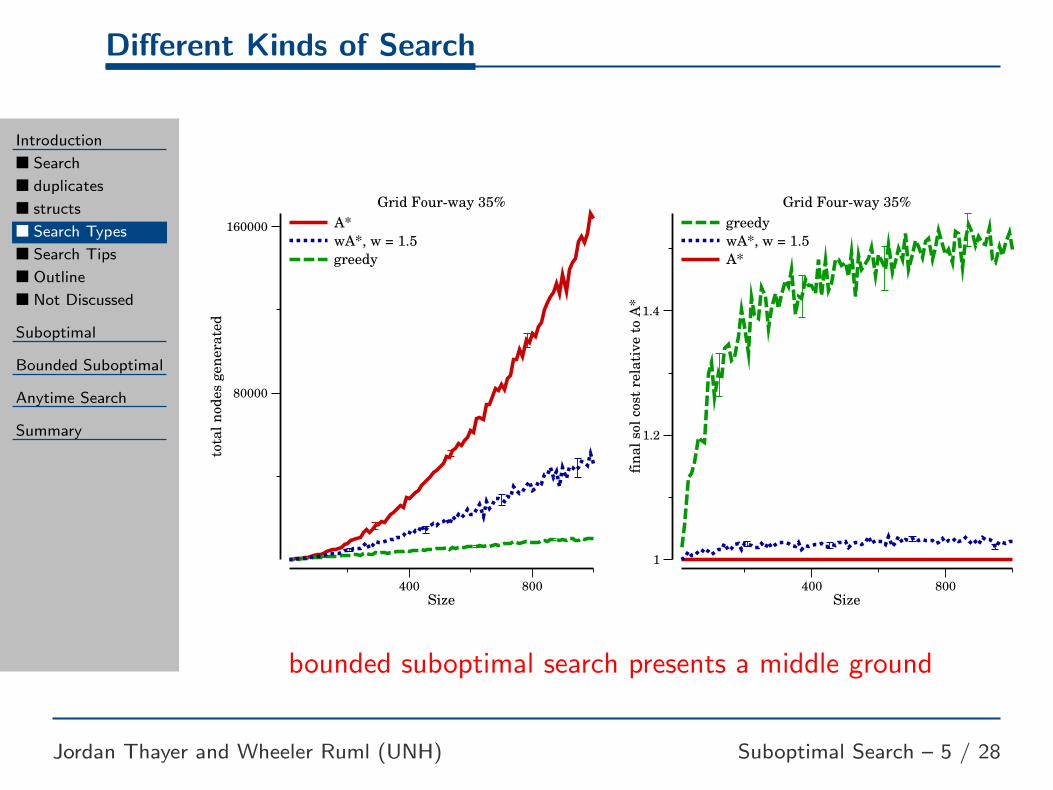
Grid Four-way 35%
Size800400
total nodes generated
160000
80000
A*
wA*, w = 1.5
greedy
Grid Four-way 35%
Size800400
fin
al
sol
cost
rela
tive t
o A
*
1.4
1.2
1
greedy
wA*, w = 1.5
A*
bounded suboptimal search presents a middle ground
Simple Tips for Efficient Search
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 6 / 28
■ store open nodes in ’closed list’ as well
prevents multiple copies of a state being open at once
■ duplicate checking and delaying or dropping
■ correct tie breaking
varies by search, generally prefer high g
■ goal test on generation
then prune for bounded suboptimal search
■ recursive expansions (to reduce heap operations)
About the Tutorial
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 7 / 28
■ Jordan and I will alternate
■ bibliography at the end
■ the pseudo code
not presented during talk
included for later review
■ not comprehensive due to time constraints
each section covers ’greatest hits’
our personal experience and biases
Things We Will Discuss
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 8 / 28
■ suboptimal search minimize solving time
greedy best-first search
beam search
LSS-learning real-time Search (LSS-LRTA*)
■ bounded suboptimal search balance time and cost
weighted A*
optimistic search
■ anytime search unknown deadlines
anytime repairing A*
anytime weighted A*
restarting weighted A*
Things We Won’t Discuss
Introduction
■ Search
■ duplicates
■ structs
■ Search Types
■ Search Tips
■ Outline
■ Not Discussed
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 9 / 28
■ optimal search strategies
■ bounded-depth tree search
■ local search strategies
■ constructing heuristics
■ using disk
■ parallel algorithms
■ anything relying on distance estimates
(come back next session)
Unboundedly Suboptimal Search
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 10 / 28
Suboptimal Search: Outline
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 11 / 28
■ greedy best-first search
variant of best-first search
■ beam search: best-first, breadth-first
irrevocable pruning
■ real-time search: LSS-LRTA*
interleaves planning and acting
next session: speedy search, A* on length, beam search on d.
Greedy Best-first Search Doran and Michie 1966
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 12 / 28
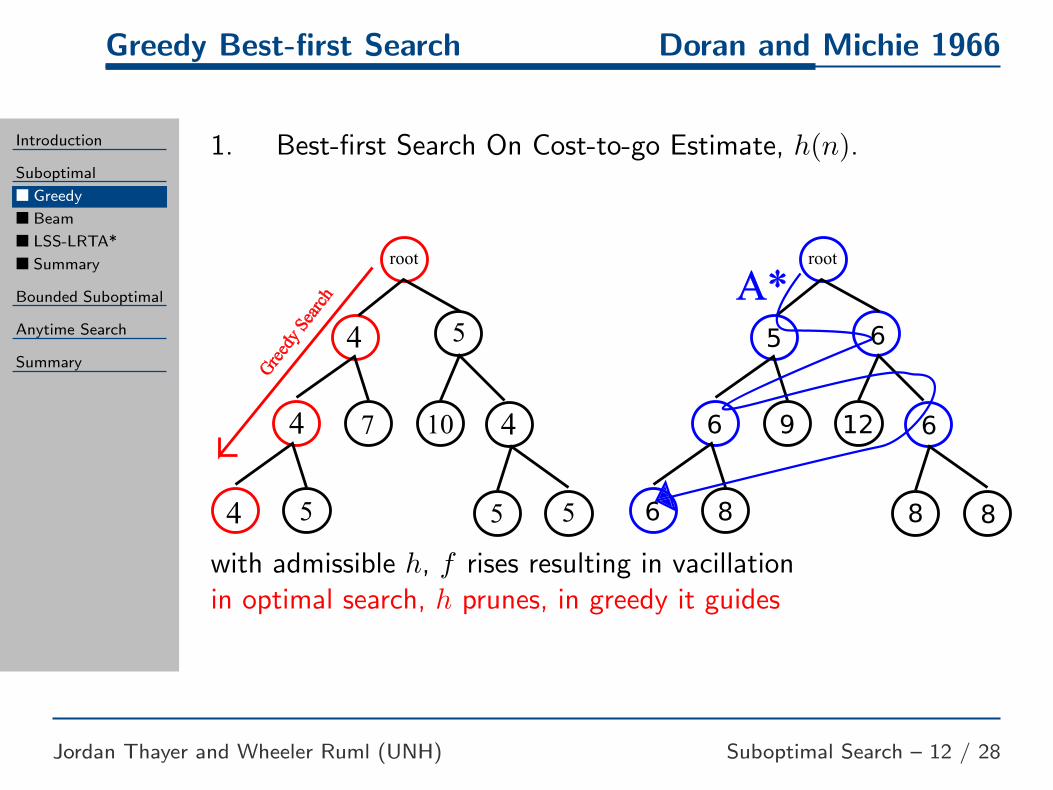
1. Best-first Search On Cost-to-go Estimate, h(n).
root
A*
5 6
8
6 6
6 88
129
with admissible h, f rises resulting in vacillationin optimal search, h prunes, in greedy it guides
Greedy Best-first Search Doran and Michie 1966
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 12 / 28
1. while open has nodes2. remove n from open with minimum h(n)3. if n is a goal then return n
4. otherwise expand n, inserting its children into open5. return failure
Greedy Best-first Search Doran and Michie 1966
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 12 / 28
1. while open has nodes2. remove n from open with minimum h(n)2a. break ties on h in favor of low g(n)3. if n is a goal then return n
4. otherwise expand n, inserting its children into open5. return failure
Greedy Best-first Search Doran and Michie 1966
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 12 / 28
1. while open has nodes2. remove n from open with minimum h(n)2a. break ties on h in favor of low g(n)3. if n is a goal then return n
4. otherwise for each child c of n4a. if c was ever expanded, discard it4b. if c is in open, keep c with smallest g4c. otherwise insert c into open5. return failure
Greedy Best-first Search Doran and Michie 1966
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 12 / 28
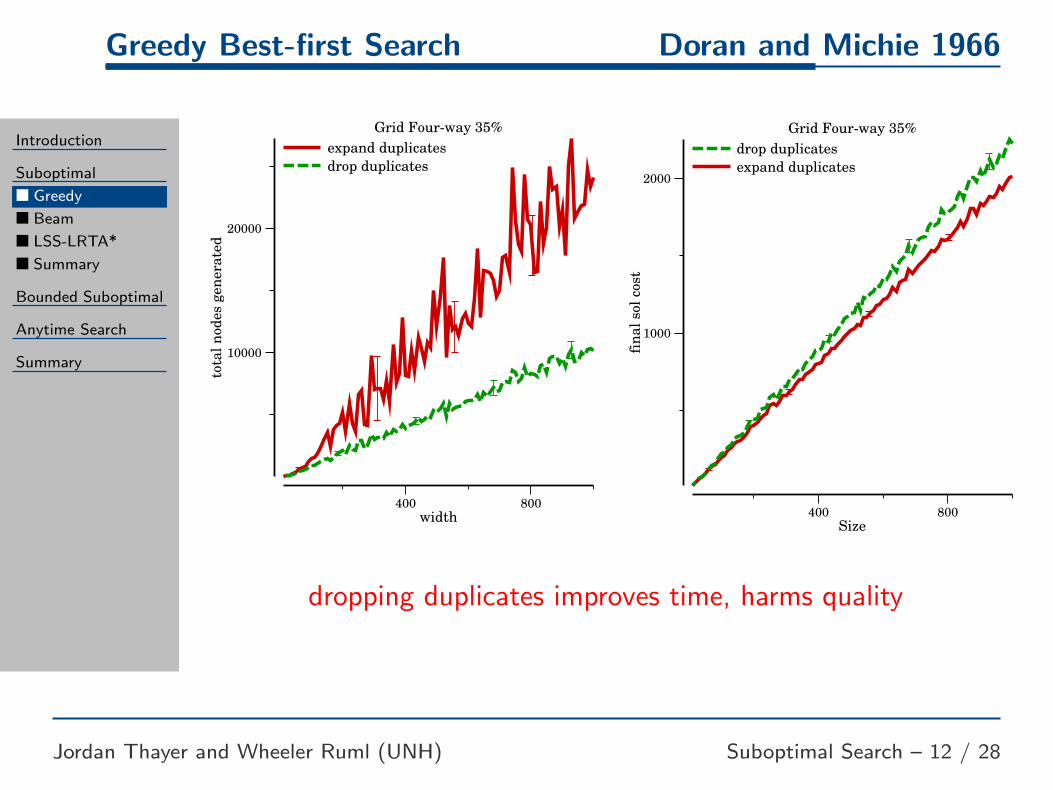
Grid Four-way 35%
width800400
total nodes generated
20000
10000
expand duplicates
drop duplicates
Grid Four-way 35%
Size800400
fin
al
sol
cost
2000
1000
drop duplicates
expand duplicates
dropping duplicates improves time, harms quality
Greedy Best-first Search Doran and Michie 1966
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 12 / 28
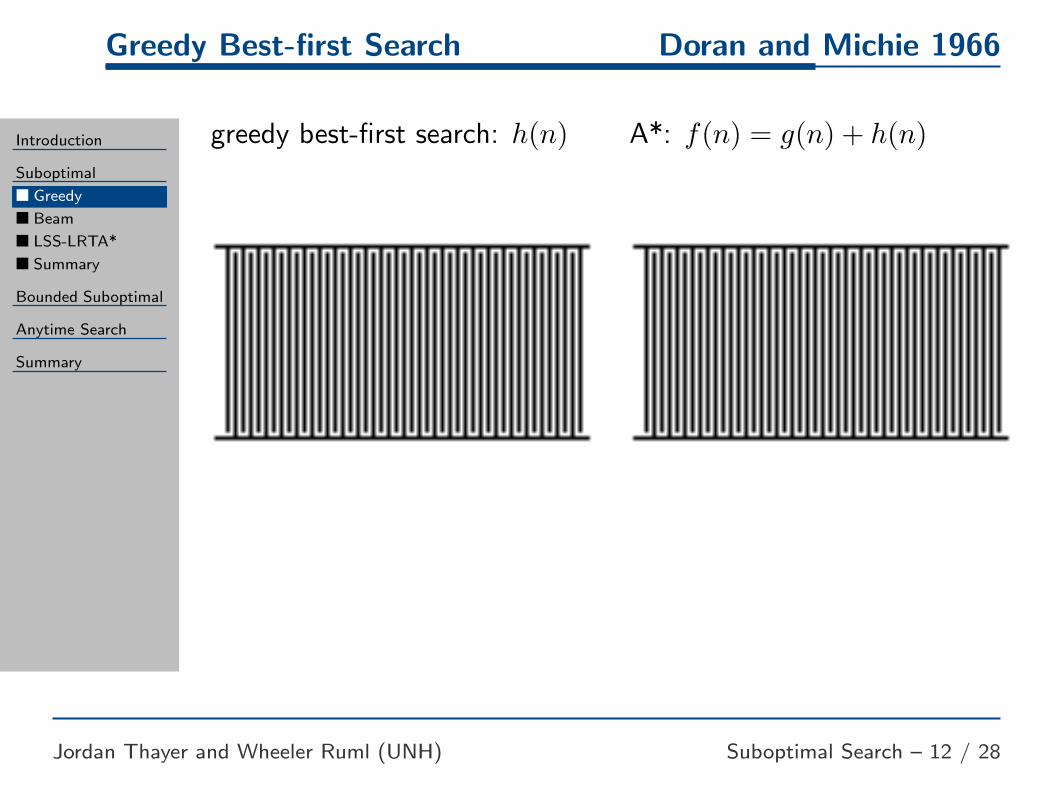
greedy best-first search: h(n) A*: f(n) = g(n) + h(n)
Greedy Best-first Search Doran and Michie 1966
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 12 / 28
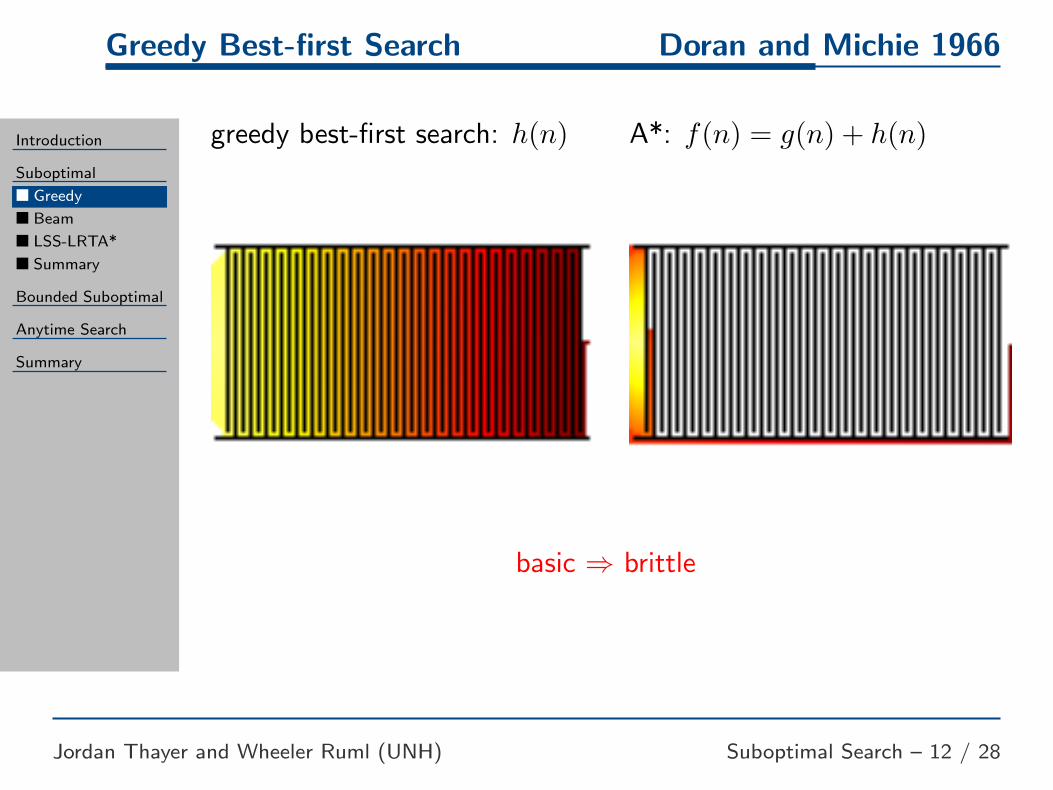
greedy best-first search: h(n) A*: f(n) = g(n) + h(n)
basic ⇒ brittle
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
Best-First Beam Search
1. run A* with a fixed sized open list2. filter out nodes with high f(n)
fixed memory (sometimes)
conflates propulsion with pruningdoesn’t work well in practice Wilt et al SoCS-10
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
Best-First Beam Search
1. while open has nodes2. remove n from open with minimum f(n)3. if n is a goal then return n
4. otherwise for each child c of n5. insert c into open6. if open is larger than width7. discard worst node on open8. return failure
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
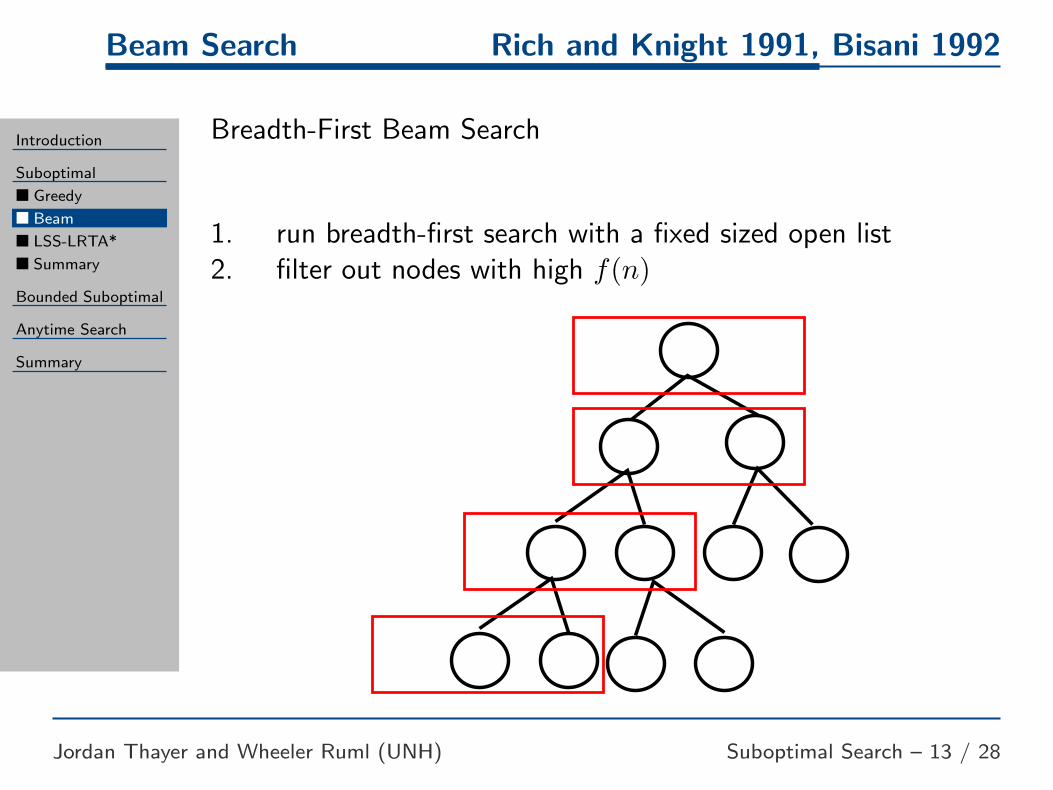
Breadth-First Beam Search
1. run breadth-first search with a fixed sized open list2. filter out nodes with high f(n)
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
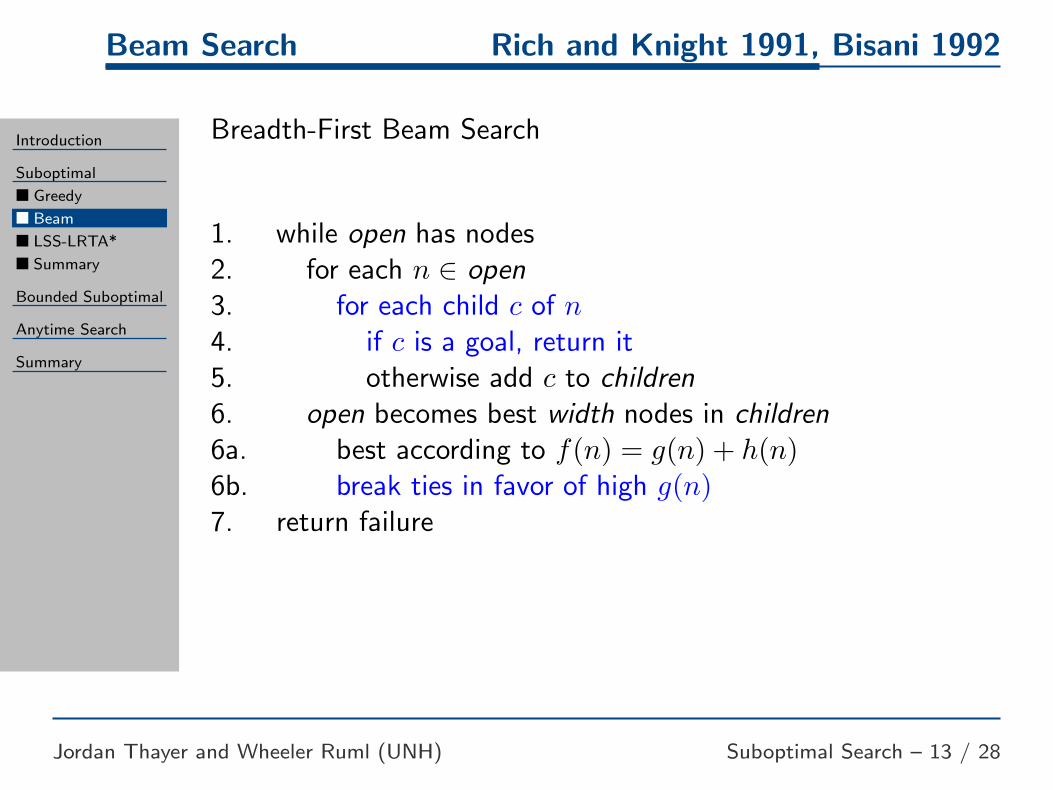
Breadth-First Beam Search
1. while open has nodes2. for each n ∈ open3. if n is a goal, return n
4. otherwise expand n, adding to children5. open becomes best width nodes in children5a. best according to f(n) = g(n) + h(n)6. return failure
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
Breadth-First Beam Search
1. while open has nodes2. for each n ∈ open3. for each child c of n4. if c is a goal, return it5. otherwise add c to children6. open becomes best width nodes in children6a. best according to f(n) = g(n) + h(n)6b. break ties in favor of high g(n)7. return failure
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
for the uninitiated, the 15 puzzle
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
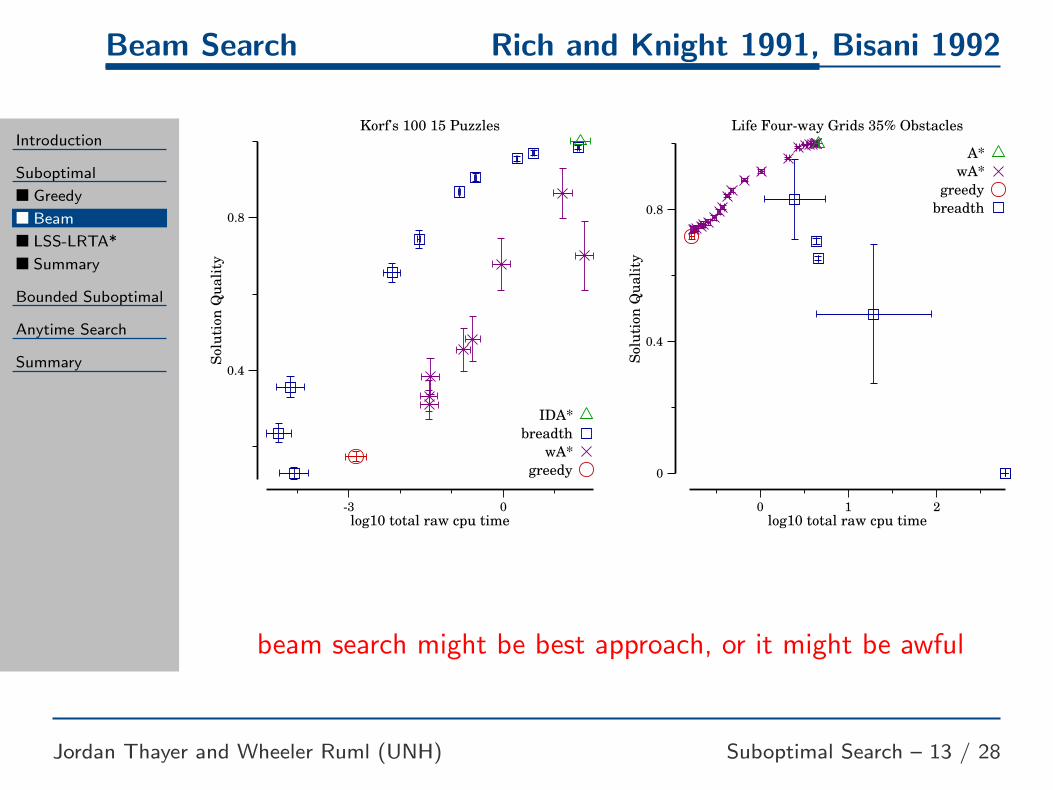
Korf's 100 15 Puzzles
log10 total raw cpu time0-3
Solution Quality
0.8
0.4
IDA*
breadth
wA*
greedy
Life Four-way Grids 35% Obstacles
log10 total raw cpu time210
Solution Quality
0.8
0.4
0
A*
wA*
greedy
breadth
beam search might be best approach, or it might be awful
Beam Search Rich and Knight 1991, Bisani 1992
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 13 / 28
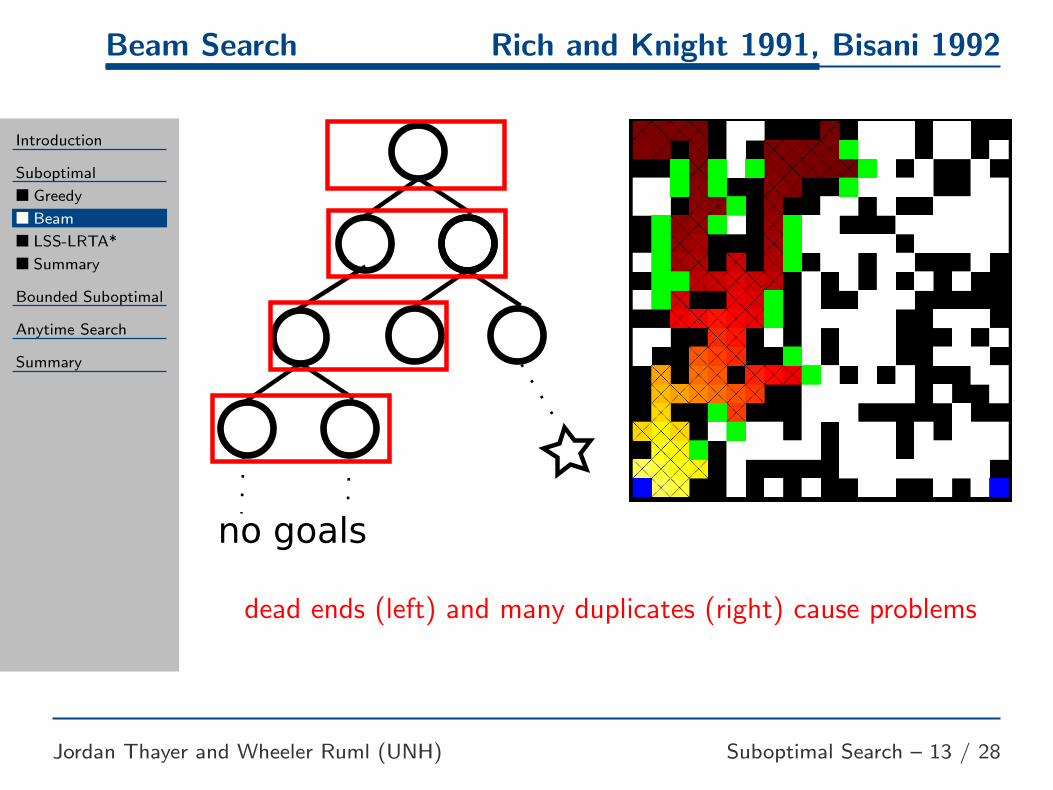
no goals
dead ends (left) and many duplicates (right) cause problems
LSS-LRTA* Koenig And Sun, 2008
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 14 / 28
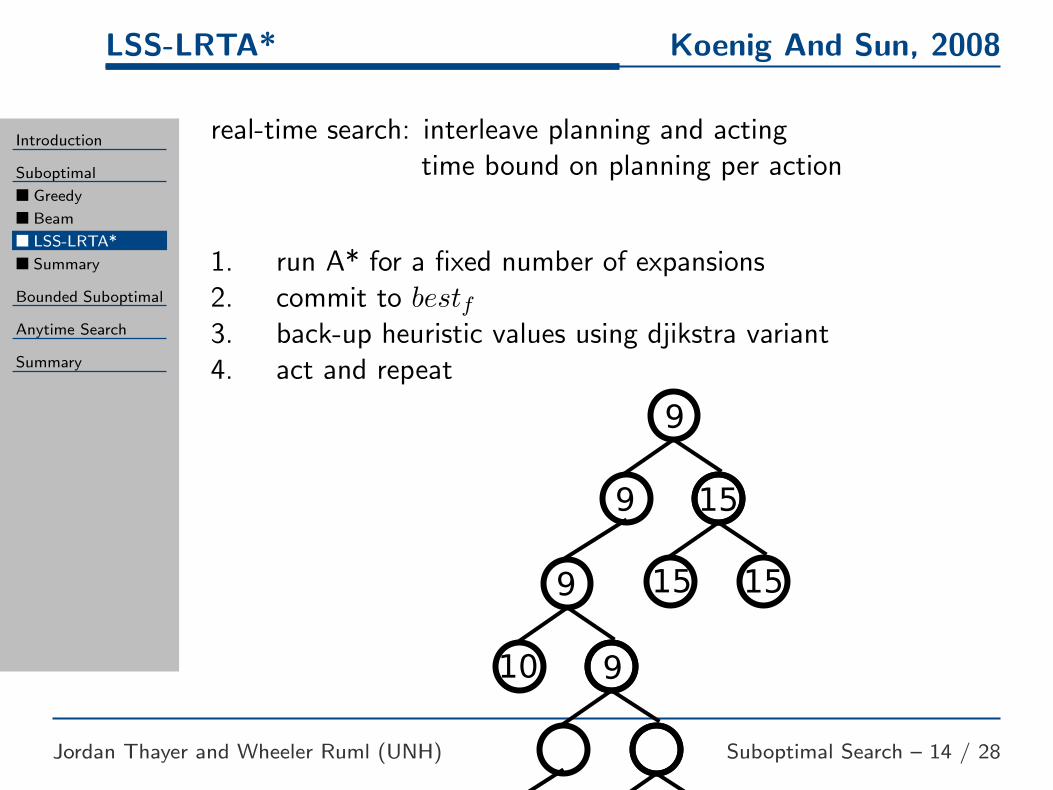
real-time search: interleave planning and actingtime bound on planning per action
1. run A* for a fixed number of expansions2. commit to bestf3. back-up heuristic values using djikstra variant4. act and repeat
LSS-LRTA* Koenig And Sun, 2008
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 14 / 28
real-time search: interleave planning and actingtime bound on planning per action
1. run A* for a fixed number of expansions2. commit to bestf3. back-up heuristic values using djikstra variant4. act and repeat
7
7 8
8
910
15 15
LSS-LRTA* Koenig And Sun, 2008
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 14 / 28
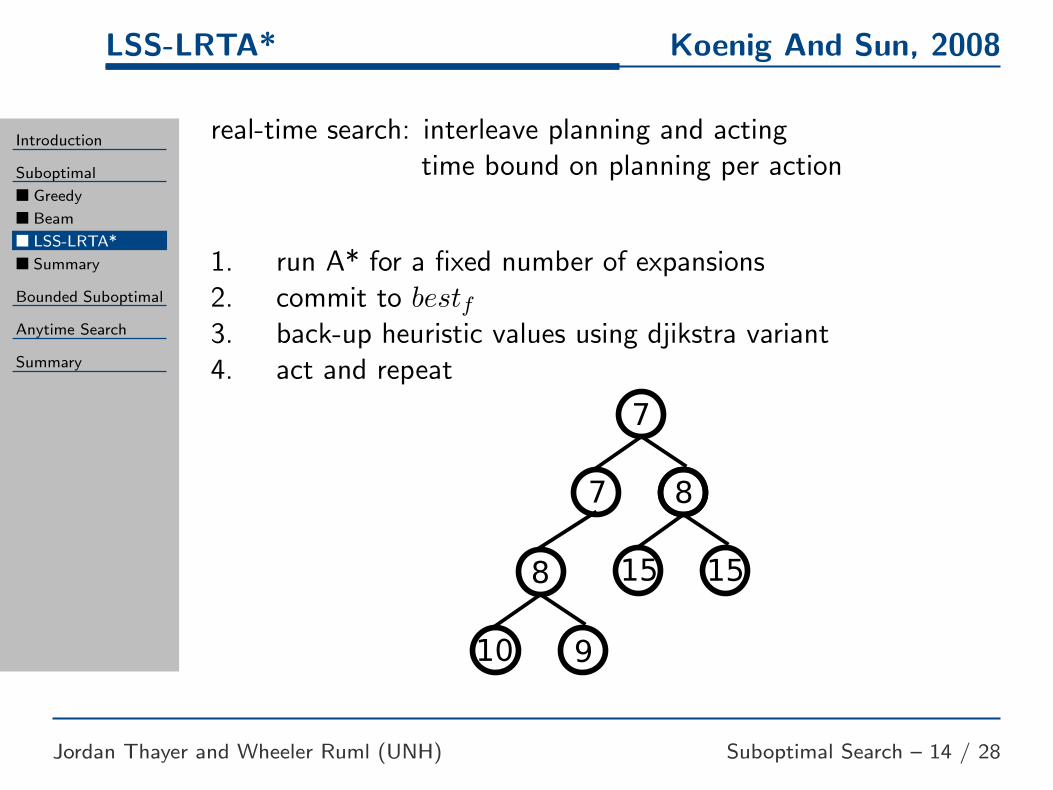
real-time search: interleave planning and actingtime bound on planning per action
1. run A* for a fixed number of expansions2. commit to bestf3. back-up heuristic values using djikstra variant4. act and repeat
7
7 8
8
910
15 15
LSS-LRTA* Koenig And Sun, 2008
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 14 / 28
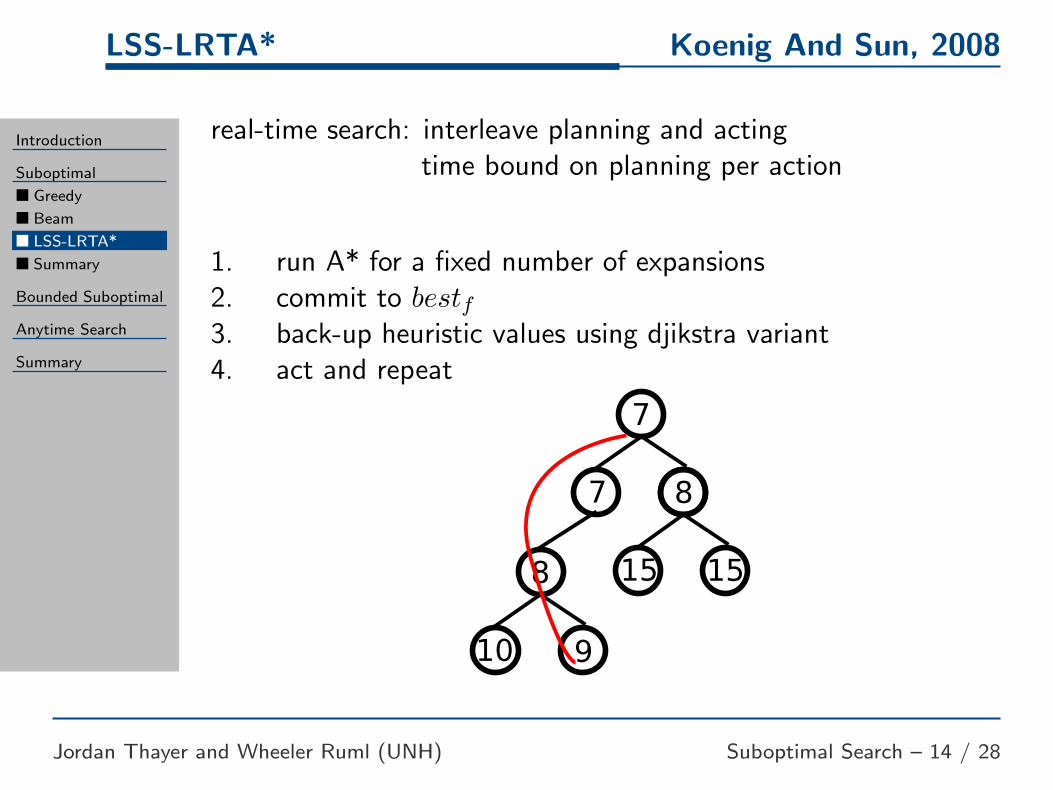
real-time search: interleave planning and actingtime bound on planning per action
1. run A* for a fixed number of expansions2. commit to bestf3. back-up heuristic values using djikstra variant4. act and repeat
910
15 159
9
9
15
LSS-LRTA* Koenig And Sun, 2008
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 14 / 28
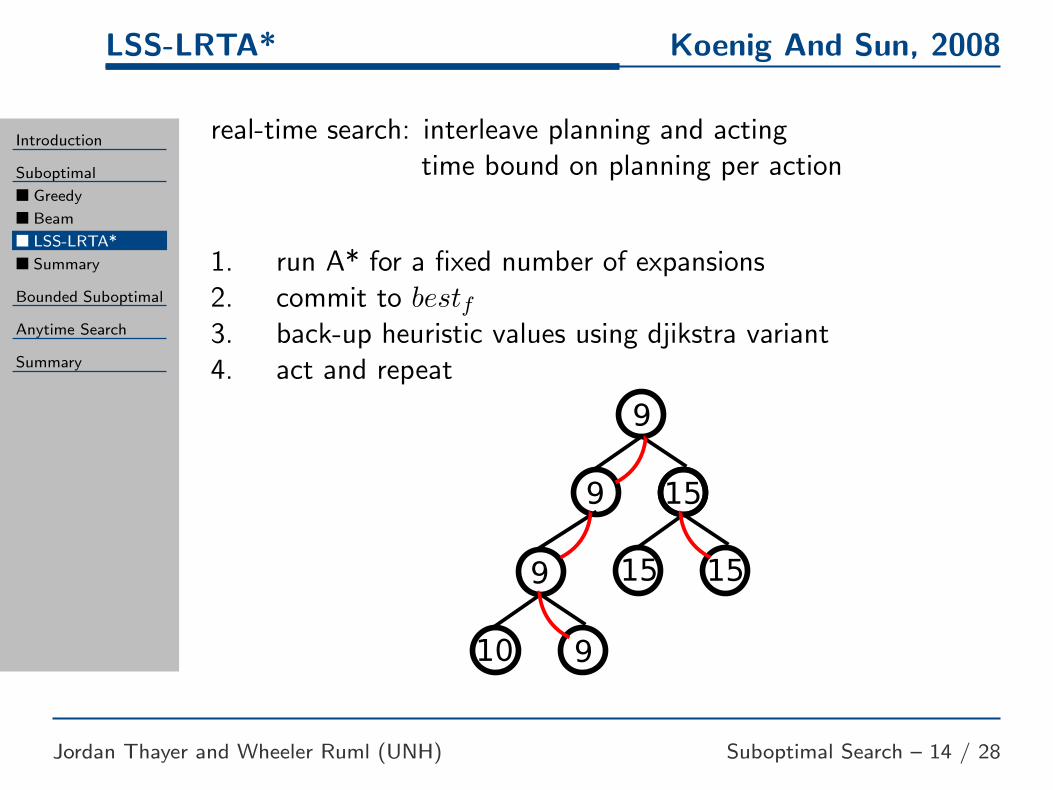
real-time search: interleave planning and actingtime bound on planning per action
1. run A* for a fixed number of expansions2. commit to bestf3. back-up heuristic values using djikstra variant4. act and repeat
910
15 159
9
9
15
LSS-LRTA* Koenig And Sun, 2008
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 14 / 28
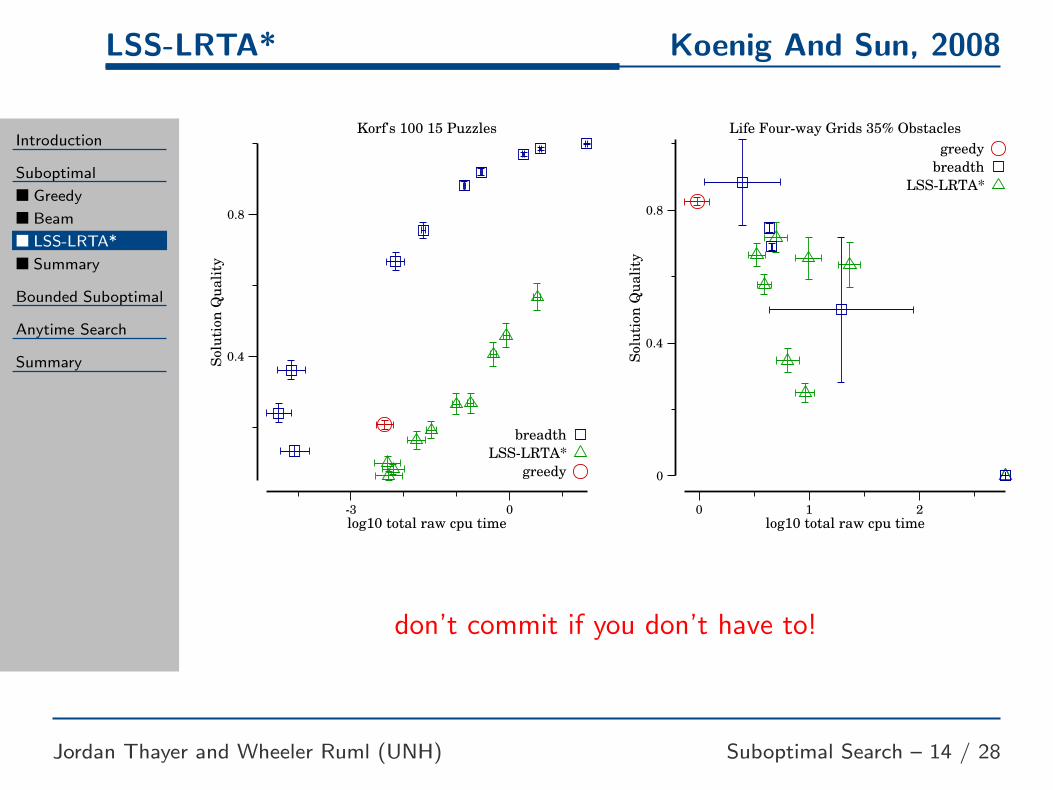
Korf's 100 15 Puzzles
log10 total raw cpu time0-3
Solution Quality
0.8
0.4
breadth
LSS-LRTA*
greedy
Life Four-way Grids 35% Obstacles
log10 total raw cpu time210
Solution Quality
0.8
0.4
0
greedy
breadth
LSS-LRTA*
don’t commit if you don’t have to!
Section Summary
Introduction
Suboptimal
■ Greedy
■ Beam
■ LSS-LRTA*
■ Summary
Bounded Suboptimal
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 15 / 28
■ duplicate policy affects solution cost and solving time
■ beam searches
breadth-first generally better than best-first
need closed lists, see Wilt et al SoCS-10
■ topology dictates algorithm choice
greedy if problems are small
beam search if problems too big for greedy
many dead necessitates complete searches
many duplicates necessitates duplicate dropping
■ real-time only if you have real-time constraints
Bounded Suboptimal Search
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 16 / 28
Bounded Suboptimal Search: Outline
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 17 / 28
■ weighted A*
larger w 6= faster search
■ optimistic search
selecting an appropriate optimism
handling duplicates effectively
next tutorial: skeptical search, A∗
ǫ , EES
Weighted A* Pohl 1970
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 18 / 28
1. Best-first Search on f ′(n) = g(n) + w · h(n)
w ≥ 1placing additional emphasis on h should encourage progressadmissible h ensures bound.
Weighted A* Pohl 1970
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 18 / 28
1. while open has nodes2. remove n from open with minimum f ′(n)3. if n is a goal then return n
4. otherwise expand n, inserting its children into open5. return failure
placing additional emphasis on h should encourage progress
Weighted A* Pohl 1970
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 18 / 28
1. while open has nodes2. remove n from open with minimum f ′(n)2a f ′(n) = g(n) + w · h(n)2b. break ties on in favor of low f(n)3. if n is a goal then return n
4. otherwise for each child c of n4a. if c was ever expanded, discard it4b. if c is in open, keep c with smallest g4c. otherwise insert c into open5. return failure
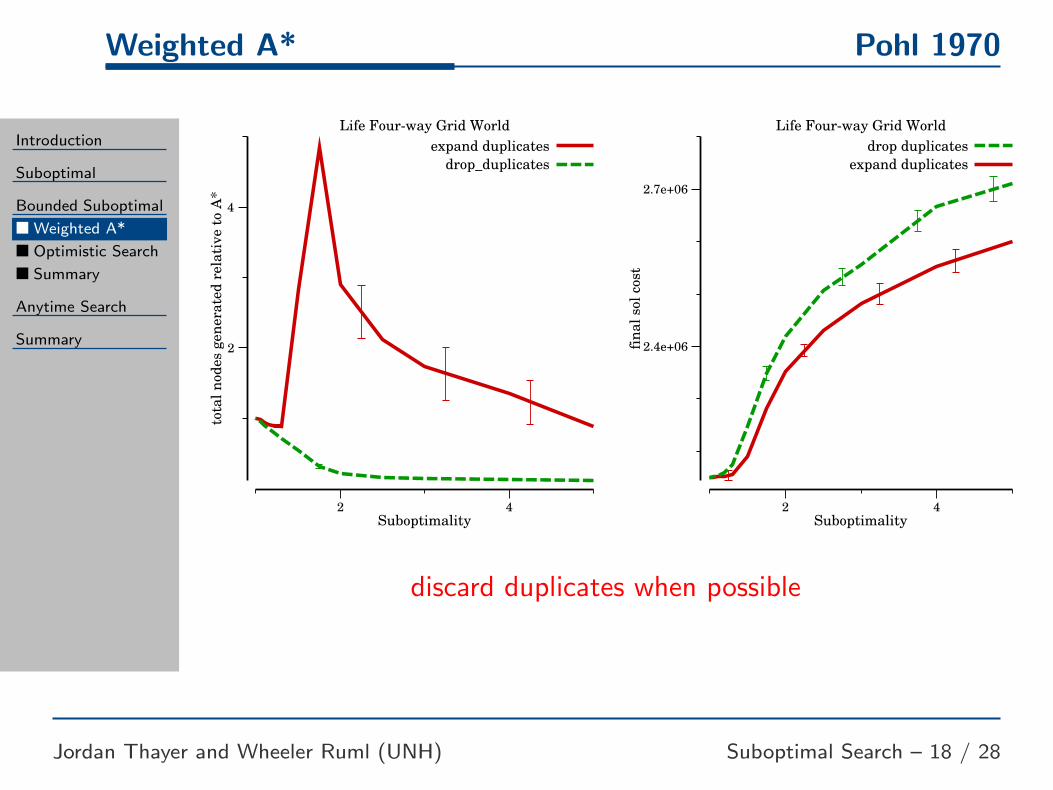
discarding duplicates greatly improves performanceat the cost of solution qualityonly applicable with consistent heuristics
Weighted A* Pohl 1970
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 18 / 28
Life Four-way Grid World
Suboptimality42
tota
l nodes genera
ted relative to A
*4
2
expand duplicates
drop_duplicates
Life Four-way Grid World
Suboptimality42
final sol cost
2.7e+06
2.4e+06
drop duplicates
expand duplicates
discard duplicates when possible
Weighted A* Pohl 1970
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 18 / 28
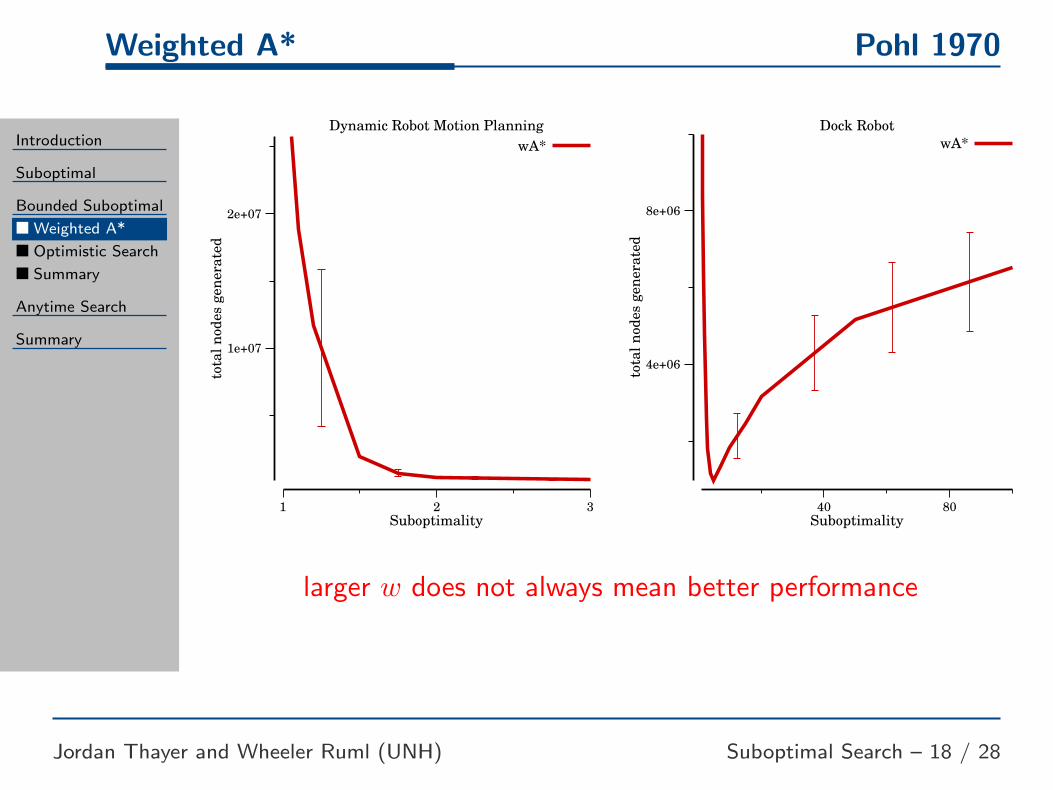
Dynamic Robot Motion Planning
Suboptimality321
total nodes generated
2e+07
1e+07
wA*
Dock Robot
Suboptimality8040
total nodes generated
8e+06
4e+06
wA*
larger w does not always mean better performance
Bound for Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 19 / 28
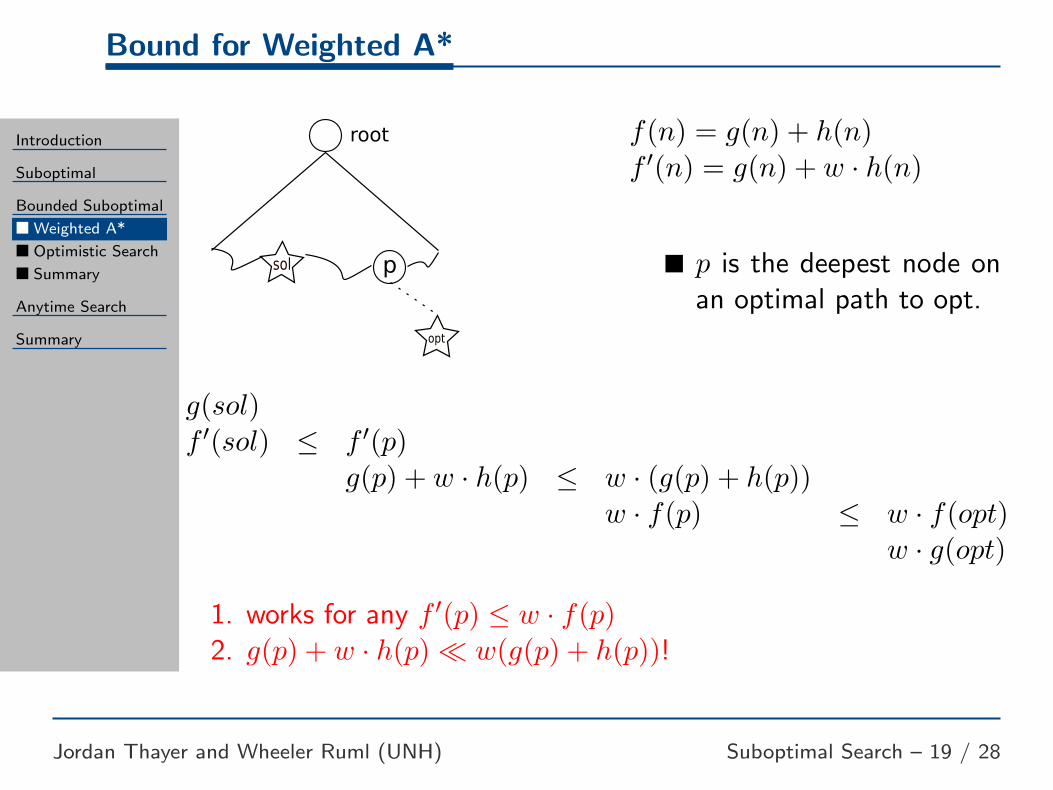
f(n) = g(n) + h(n)f ′(n) = g(n) + w · h(n)
■ p is the deepest node onan optimal path to opt.
g(sol)f ′(sol) ≤ f ′(p)
g(p) + w · h(p) ≤ w · (g(p) + h(p))w · f(p) ≤ w · f(opt)
w · g(opt)
1. works for any f ′(p) ≤ w · f(p)2. g(p) + w · h(p) ≪ w(g(p) + h(p))!
Optimistic Search Thayer and Ruml, ICAPS-08
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 20 / 28
■ run weighted A∗ with a high weight.
■ expand node with lowest f value after a solution is found.
continue until w · bestf ≥ f(sol)
this ’clean up’ guarantees solution quality.
Optimistic Search Thayer and Ruml, ICAPS-08
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 20 / 28
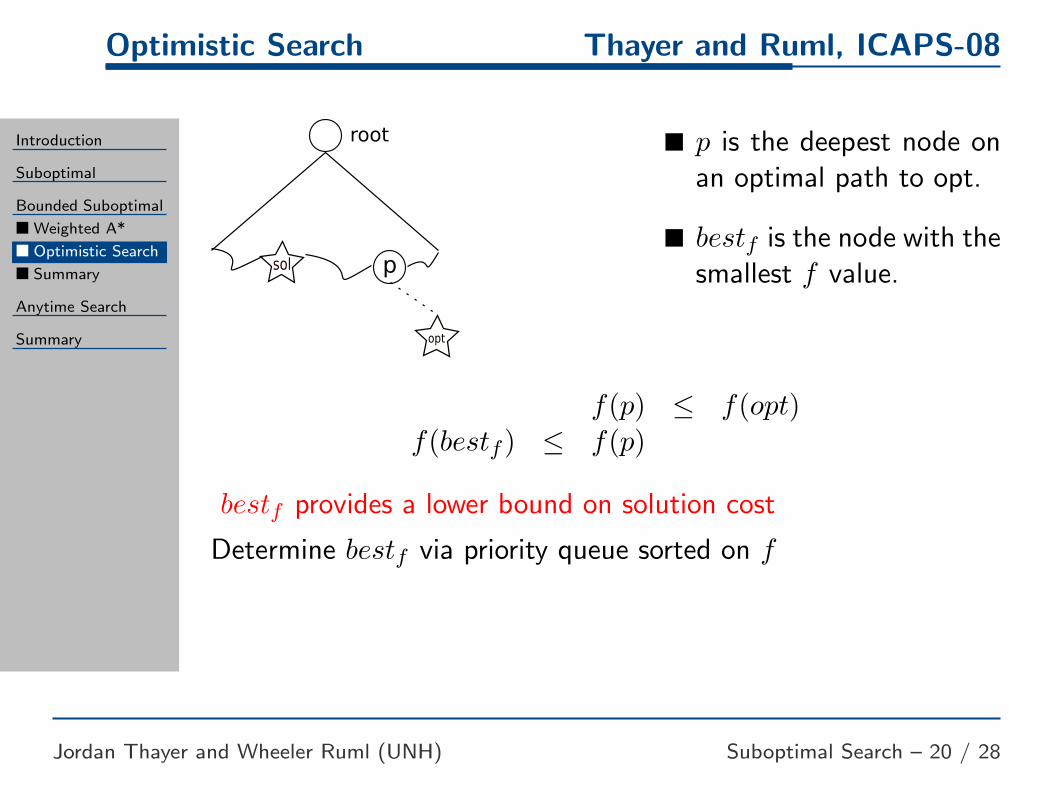
■ p is the deepest node onan optimal path to opt.
■ bestf is the node with thesmallest f value.
f(p) ≤ f(opt)f(bestf ) ≤ f(p)
bestf provides a lower bound on solution cost
Determine bestf via priority queue sorted on f
Optimistic Search Thayer and Ruml, ICAPS-08
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 20 / 28
1. run weighted A∗ with weight (bound− 1) · 2 + 1
2. expand node with lowest f value after a solution is found.
Continue until w · bestf ≥ f(sol)
this ’clean up’ guarantees solution quality.
Optimistic Search Thayer and Ruml, ICAPS-08
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 20 / 28
1. run weighted A∗ with a high weight.
2. expand node with lowest f value after a solution is found.
continue until w · bestf ≥ f(sol)
this ’clean up’ guarantees solution quality.
Optimistic Search Thayer and Ruml, ICAPS-08
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 20 / 28
Optimistic Search Thayer and Ruml, ICAPS-08
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 20 / 28
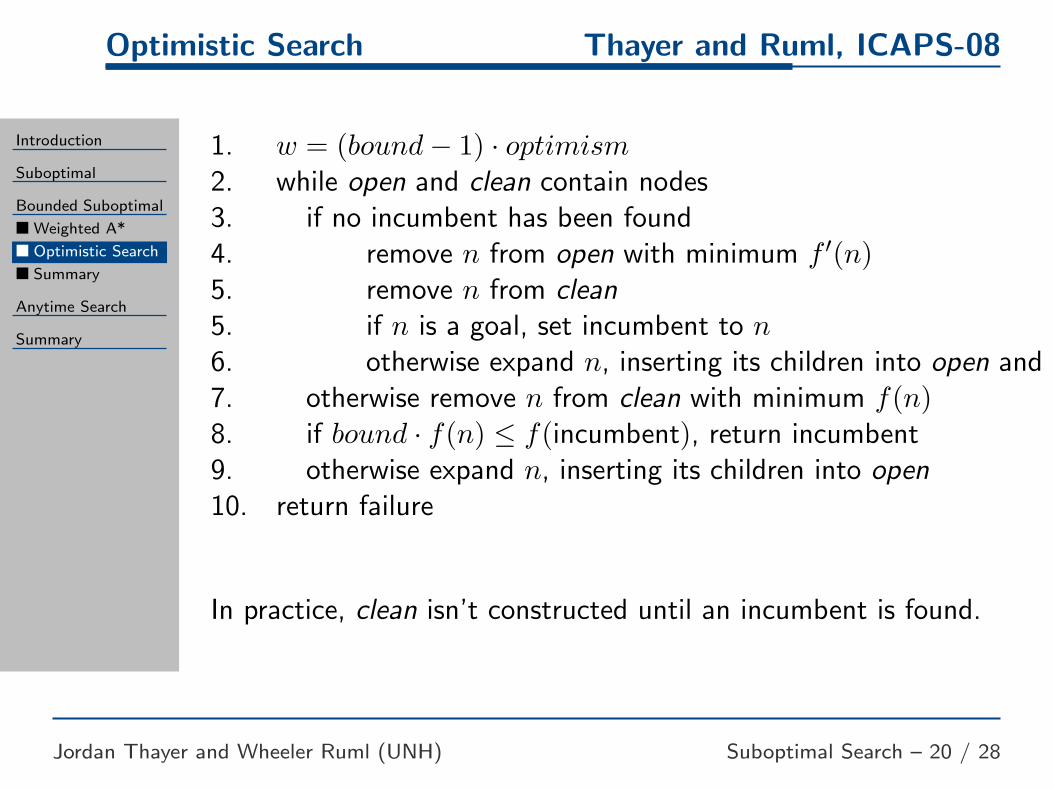
1. w = (bound− 1) · optimism
2. while open and clean contain nodes3. if no incumbent has been found4. remove n from open with minimum f ′(n)5. remove n from clean5. if n is a goal, set incumbent to n
6. otherwise expand n, inserting its children into open and clean7. otherwise remove n from clean with minimum f(n)8. if bound · f(n) ≤ f(incumbent), return incumbent9. otherwise expand n, inserting its children into open10. return failure
In practice, clean isn’t constructed until an incumbent is found.
Optimistic Search Thayer and Ruml, ICAPS-08
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 20 / 28
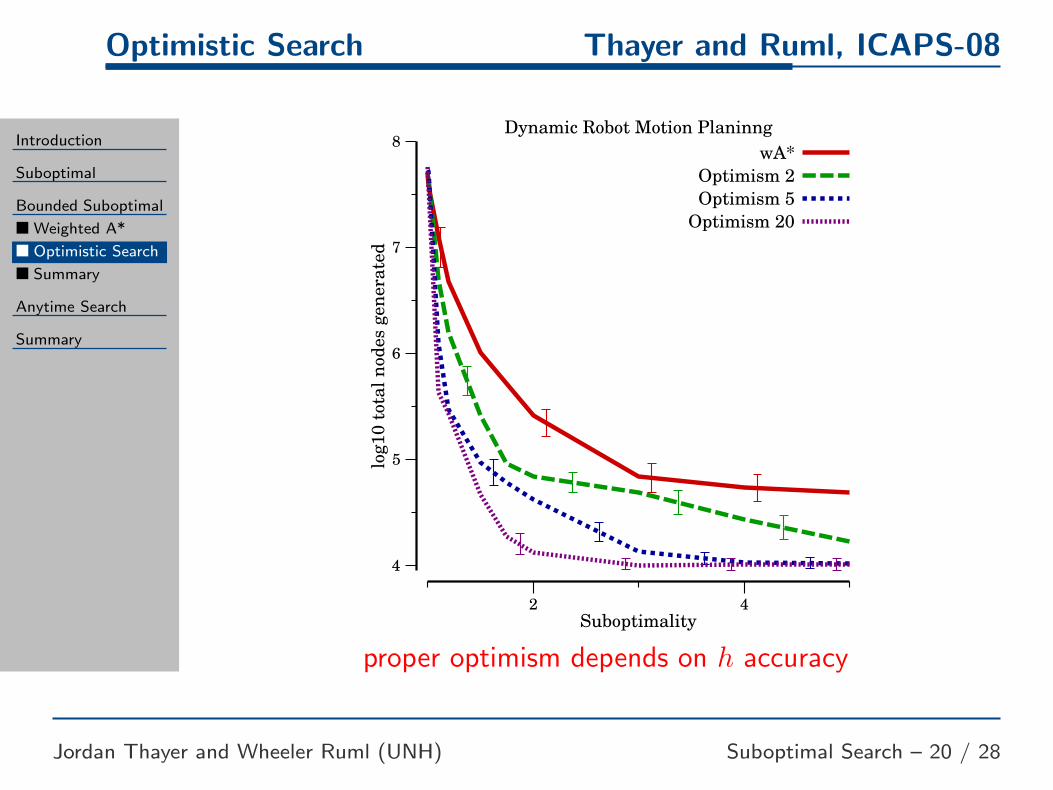
Dynamic Robot Motion Planinng
Suboptimality42
log10 total nodes generated
8
7
6
5
4
wA*
Optimism 2
Optimism 5
Optimism 20
proper optimism depends on h accuracy
Section Summary
Introduction
Suboptimal
Bounded Suboptimal
■ Weighted A*
■ Optimistic Search
■ Summary
Anytime Search
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 21 / 28
■ use weighted A* as a first approach to a problem
■ use optimistic search if you know weighted A* works well
■ duplicate handling can be important
wA* can drop, requires consistent heuristic
other algorithms can delay
■ solving problems and showing bounds can be separate steps
Anytime Search
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 22 / 28
Anytime Search Algorithms: Outline
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 23 / 28
■ anytime repairing A*
■ anytime weighted A*
■ restarting weighted A*
come back next session for d-fenestration, size-cost search
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
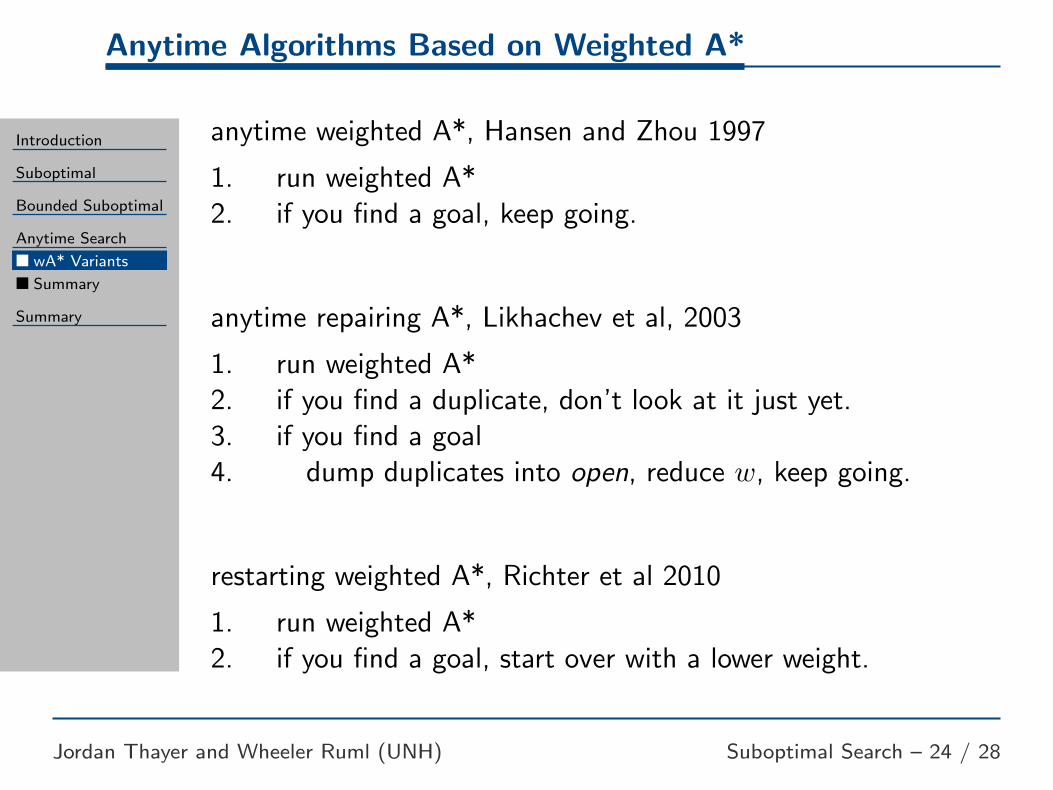
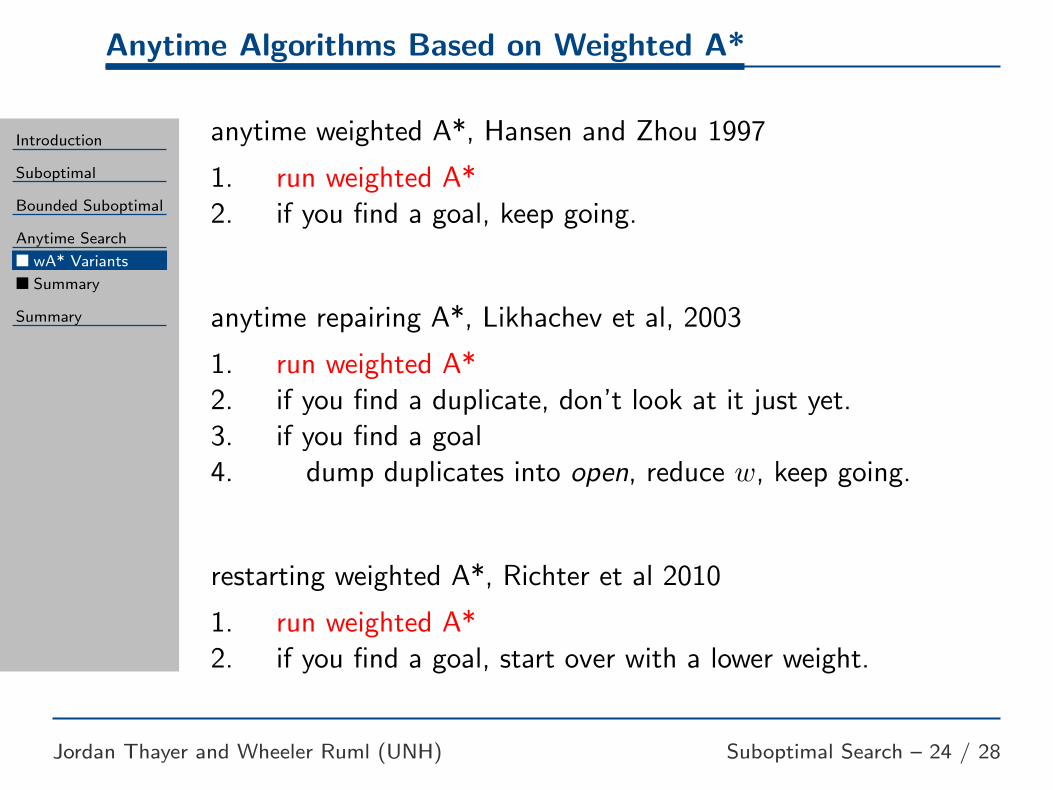
anytime weighted A*, Hansen and Zhou 1997
1. run weighted A*2. if you find a goal, keep going.
anytime repairing A*, Likhachev et al, 2003
1. run weighted A*2. if you find a duplicate, don’t look at it just yet.3. if you find a goal4. dump duplicates into open, reduce w, keep going.
restarting weighted A*, Richter et al 2010
1. run weighted A*2. if you find a goal, start over with a lower weight.
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
anytime weighted A*, Hansen and Zhou 1997
1. run weighted A*2. if you find a goal, keep going.
anytime repairing A*, Likhachev et al, 2003
1. run weighted A*2. if you find a duplicate, don’t look at it just yet.3. if you find a goal4. dump duplicates into open, reduce w, keep going.
restarting weighted A*, Richter et al 2010
1. run weighted A*2. if you find a goal, start over with a lower weight.
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
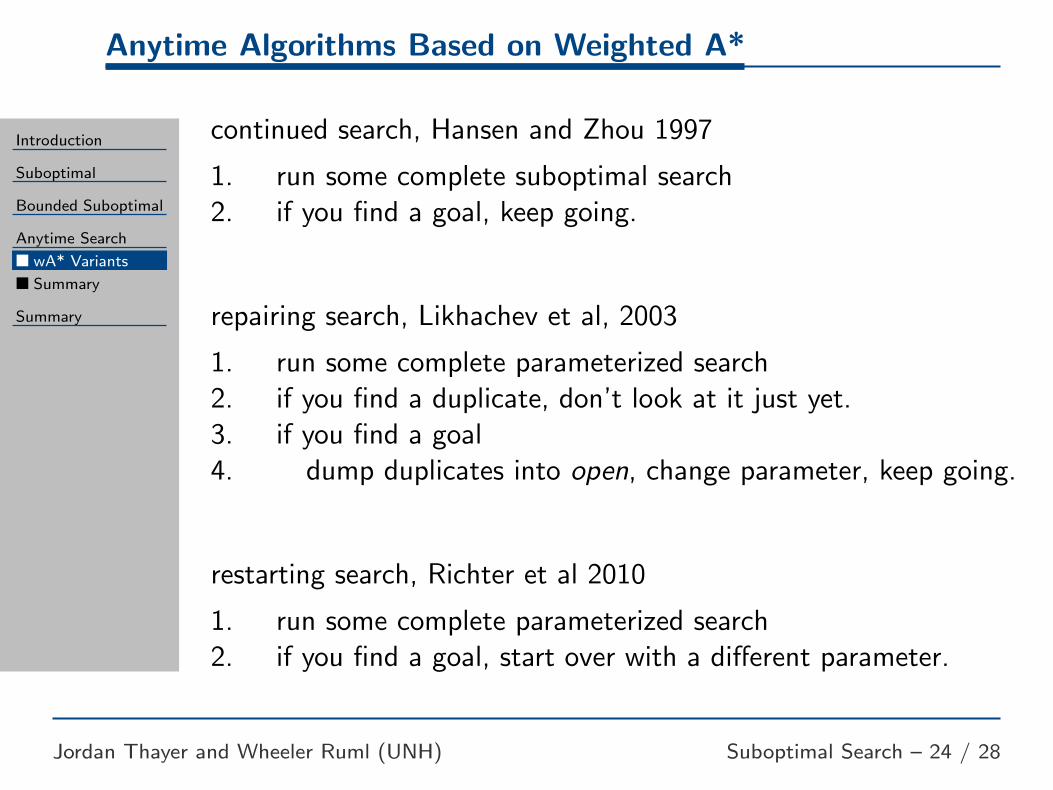
continued search, Hansen and Zhou 1997
1. run some complete suboptimal search2. if you find a goal, keep going.
repairing search, Likhachev et al, 2003
1. run some complete parameterized search2. if you find a duplicate, don’t look at it just yet.3. if you find a goal4. dump duplicates into open, change parameter, keep going.
restarting search, Richter et al 2010
1. run some complete parameterized search2. if you find a goal, start over with a different parameter.
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
anytime weighted A*, Hansen and Zhou 1997
1. while open has nodes2. remove n from open with minimum f ′(n)3. if n is a goal set n as incumbent4. otherwise for each child c of n5. if f(c) < f(incumbent) insert c into open6. return incumbent
anytime repairing A*, Likhachev et al, 2003restarting weighted A*, Richter et al 2010
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
anytime weighted A*, Hansen and Zhou 1997anytime repairing A*, Likhachev et al, 2003
1. while open has nodes2. remove n from open with minimum f ′(n)3. if n is a goal4. set n as incumbent5. empty delay into open6. reduce w
7. otherwise for each child c of n8. if c was ever expanded, add it to delay9. otherwise insert c into open10. return incumbent
restarting weighted A*, Richter et al 2010
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
anytime weighted A*, Hansen and Zhou 1997anytime repairing A*, Likhachev et al, 2003restarting weighted A*, Richter et al 2010
1. while open has nodes2. remove n from open with minimum f ′(n)3. if n is a goal4. set n as incumbent5. reduce w
6. if w < 1, return incumbent7. otherwise restart the search8. otherwise for each child c of n9. if f(c) < f(incumbent) insert c into open10. return incumbent
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
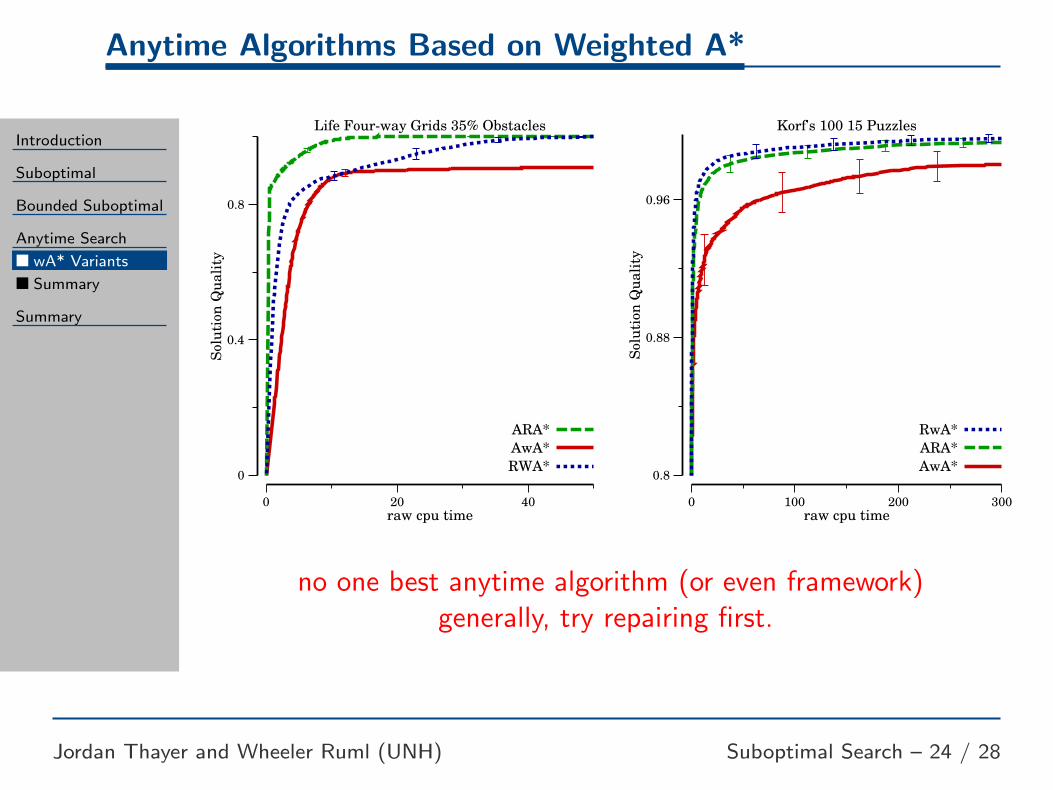
Life Four-way Grids 35% Obstacles
raw cpu time40200
Solution Quality
0.8
0.4
0
ARA*
AwA*
RWA*
Korf's 100 15 Puzzles
raw cpu time3002001000
Solution Quality
0.96
0.88
0.8
RwA*
ARA*
AwA*
no one best anytime algorithm (or even framework)generally, try repairing first.
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
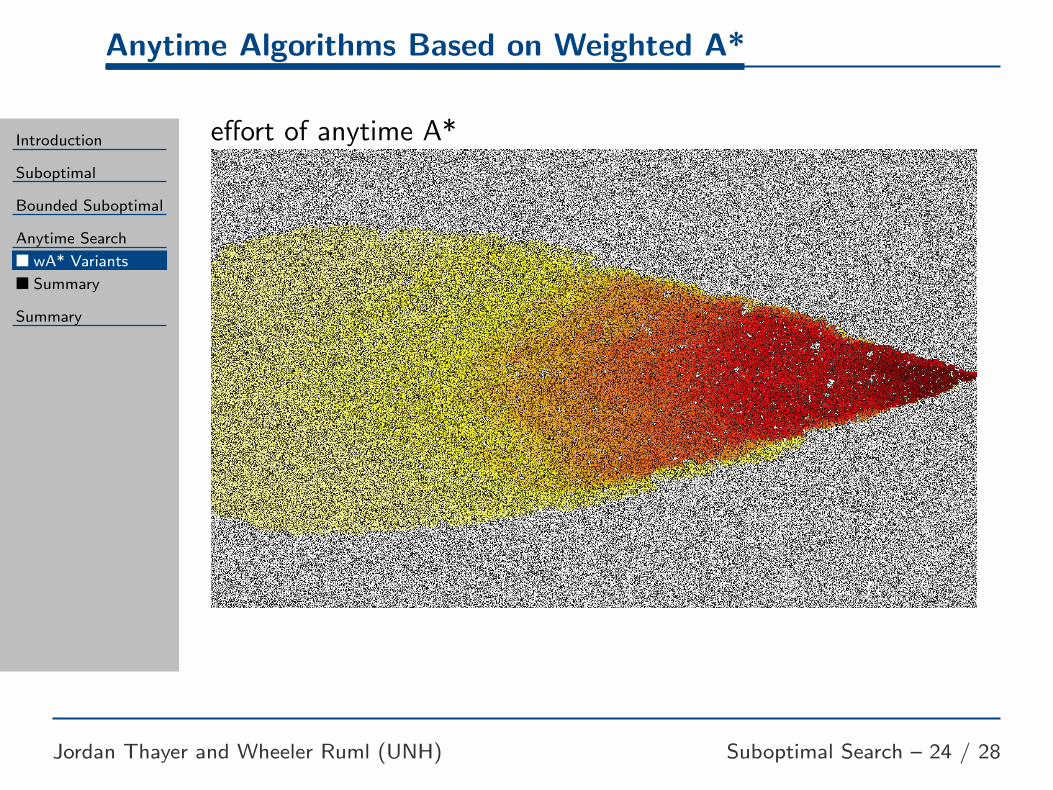
effort of anytime A*
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
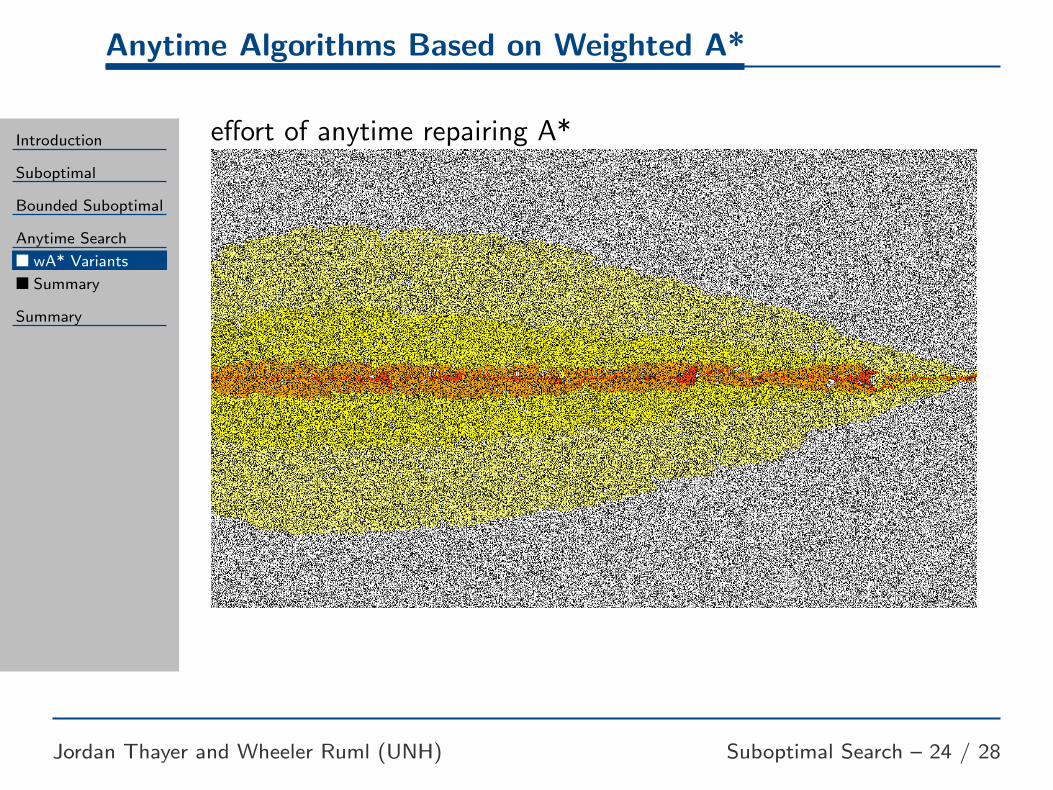
effort of anytime repairing A*
Anytime Algorithms Based on Weighted A*
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 24 / 28
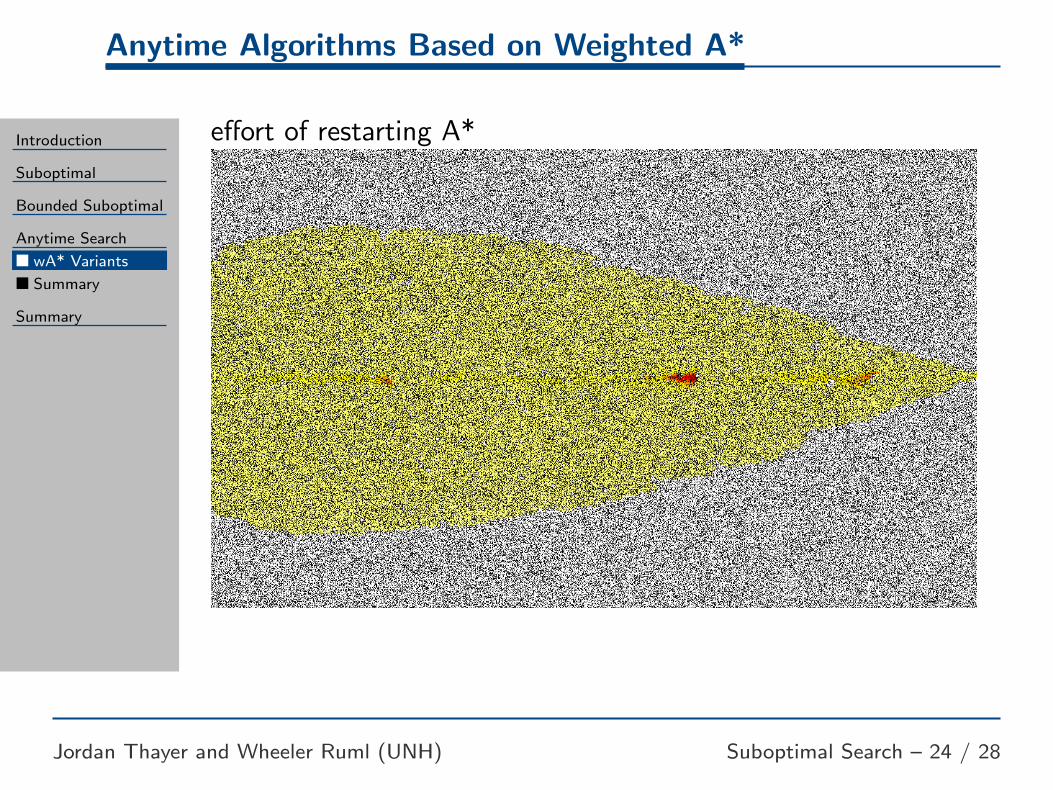
effort of restarting A*
Summary Anytime Search
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
■ wA* Variants
■ Summary
Summary
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 25 / 28
■ ARA*, AwA*, RwA*
describe general frameworks (wA* not important)
continued – few duplicates, tight lower bound
repairing – many duplicates, high initial bound
restarting – low h bias, cheap expansions
■ great for unknown deadlines
■ for known deadlines, deadline aware search
(Dionne et al, SoCS-11)
Summary
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
■ Bibliography
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 26 / 28
Things We Discussed
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
■ Bibliography
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 27 / 28
■ suboptimal search minimize solving time
no guarantees on solution quality
so use inadmissible heuristics
and drop duplicate states
■ bounded suboptimal search balance time and cost
bounds on solution quality
drop duplicates when possible
looser bounds 6= always better performance
■ anytime search unknown deadlines
automatically trades time for quality
deadline agnostic
frameworks can be used with any complete algorithm
Bibliography
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
■ Bibliography
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 28 / 28
■ J. E. Dorand and D. Michie,“Experiments with the Graph Traverser Program”,Proceedings of the Royal Society of London. Series A,Mathematical and Physical Sciences, 1966.
■ Ira Pohl, “Heuristic Search Viewed as Path Finding in a Graph”,Artificial Intelligence volume 1, 1970.
■ Elain Rich and Kevin Knight, “Artificial Intelligence”, 1991.
■ Sven Koenig and Xiaoxun Sun,“Comparing Real-Time and Incremental Heuristic Search forReal-Time Situated Agents”,AAMAS-2008.
■ Jordan T. Thayer and Wheeler Ruml,“Faster Than Weigthed A*:An Optimistic Approach to Bounded Suboptimal Search”,ICAPS-2008.
Bibliography
Introduction
Suboptimal
Bounded Suboptimal
Anytime Search
Summary
■ Bibliography
Jordan Thayer and Wheeler Ruml (UNH) Suboptimal Search – 28 / 28
■ Eric A. Hansen, Shlomo Zilberstein and Victor A. Danilchenko,“Anytime Heuristic Search: First Results”,University of Massachusetts, Amherst Technical Repart 97-50,1997.
■ Maxim Likhachev, Geoff Gordon and Sebastian Thrun“ARA*: Anytime A* with Provable Bounds on Sub-Optimality”,NIPS-2003.
■ Eric A. Hansen and Rong Zhou,”Anytime Heuristic Search”,Journal of Artificial Intelligence Research volume 28, 2007.
■ Silvia Richter, Jordan T. Thayer and Wheeler Ruml,”The Joy of Forgetting: Faster Anytime Search via Restarting”,ICAPS-2010.
■ Chris Wilt, Jordan T. Thayer, and Wheeler Ruml,“A Comparison of Greedy Search Algorithms”, SoCS-2010.





























