Embed Size (px)
Citation preview

A Reflective Symmetry Descriptor
Michael Kazhdan,Bernard Chazelle, David Dobkin, Adam Finkelstein, and Thomas Funkhouser
Princeton University, Princeton NJ 08544, USA
Abstract. Computing reflective symmetries of 2D and 3D shapes is a classi-cal problem in computer vision and computational geometry. Most prior workhas focused on finding the main axes of symmetry, or determining that none ex-ists. In this paper, we introduce a new reflective symmetry descriptor that repre-sents a measure of reflective symmetry for an arbitrary 3D voxel model for allplanes through the model’s center of mass (even if they are not planes of symme-try). The main benefits of this new shape descriptor are that it is defined over acanonical parameterization (the sphere) and describes global properties of a 3Dshape. Using Fourier methods, our algorithm computes the symmetry descriptorin O(N4 logN) time for an N � N � N voxel grid, and computes a multires-olution approximation in O(N3 logN) time. In our initial experiments, we havefound the symmetry descriptor to be useful for registration, matching, and classi-fication of shapes.
1 Introduction
Detecting symmetry in 3D models is a well studied problem with applications in alarge number of areas. For instance, the implicit redundancy in symmetric models isused to guide reconstruction [1, 2], axes of symmetry provide a method for defining acoordinate system for models [3], and symmetries are used for shape classification andrecognition [4, 5].
Despite its intuitive appeal, symmetry has been under-utilized in computer-aidedshape analysis. Most previous methods have focused only on discrete detection of sym-metries – i.e., classifying a model in terms of its symmetry groups (either a model hasa symmetry, or it does not) [2, 6–13]. Accordingly, they provide limited informationabout the overall shape of an object, and they are not very useful for shapes that haveno symmetries. In contrast, in the context of shape analysis, we believe that it is just asimportant to know that a model does not have a particular symmetry, as it is to knowthat it does.
The objective of our work is to define a continuous measure of reflective symmetry(over any plane for any 3D model) and use it to build a concise shape signature that isuseful for registration, matching, and classification of 3D objects. Our approach is todefine a reflective symmetry desciptor as a 2D function that gives the measure of invari-ance of a model with respect to reflection about each plane through the model’s centerof mass. For example, Figure 1 shows a car, cube and chair (top) and their correspond-ing reflective symmetry descriptors (bottom). The descriptors are drawn by scaling unitvectors on the sphere in proportion to the measure of reflective symmetry about the

Fig. 1. A visualization of the reflective symmetry descriptor for a car, a cube, and a chair. Thevisualization is obtained by scaling unit vectors on the sphere in proportion to the measure ofreflective symmetry about the plane through the center of mass, normal to the vector.
plane through the center of mass and normal to the vector. Note that the reflective sym-metry descriptor provides a continuous measure of reflective symmetry for all planesthrough the center of mass, and has peaks corresponding to the planes of symmetry,or near symmetry, of the models. For example, the symmetry descriptor of the chair inFigure 1 has strong peaks corresponding to its left-right symmetry, it has smaller hori-zontal and vertical peaks corresponding to the seat and back of the chair, but it also hasa strong peak corresponding to the plane that reflects the back of the chair into the seat.Thus, in the case of the chair, the reflective symmetry descriptor describes not only thedifferent parts of the chair, but also their spatial relationships.
For shape analysis tasks, the potential advantages of the reflective symmetry de-scriptor are four-fold. First, it characterizes the global shape of the object, and thusit is well-suited for the matching of whole objects (as is often needed for searchinglarge databases of 3D objects). Second, it is defined over a canonical 2D domain (thesphere), and thus it provides a common parameterization for arbitary 3D models thatcan be used for alignment and comparison. Third, it is insensitive to noise and othersmall perturbations in a 3D model, since each point on the symmetry descriptor repre-sents an integration over the entire volume, and thus similar models which only differ intheir fine details have similar symmetry descriptors. Finally, it describes the shape of anobject in terms of its symmetry features, which provide distinguishing shape informa-tion for many objects (look around your office and consider classifying objects basedon their symmetries). This approach is quite different from existing shape descriptors,and thus in addition to being useful on its own, it may be helpful to use in conjunctionwith other representations.
In this paper, we describe our initial research in defining, computing, and using re-flective symmetry descriptors. Specifically, we make the following contributions: (1)we define a new continuous measure for the reflective symmetry of a 3D voxel modelwith respect to a given plane, (2) we describe efficient algorithms to compute the reflec-tive symmetry measure for all planes through the center of mass of a 3D model, and (3)we present experimental results evaluating the utility of reflective symmetry descrip-

tors for registration and classification of 3D models. In our tests, we find that reflectivesymmetry descriptors are more effective than commonly used shape descriptors (e.g.,moments [14] and shape distributions[15]) for registering and classifying 3D models.
The remainder of the paper is organized as follows. Section 2 contains a brief reviewof related work. Next, Section 3 introduces our new measure of reflective symmetry forvoxel models, and Section 4 describes an efficient algorithm for computing a shape de-scriptor based on this measure. Section 5 discusses some of the properties of the reflec-tive symmetry descriptor, while Section 6 presents experimental results acquired duringtests in shape registration and classification applications. Finally, Section 7 contains abrief summary of our work and a discussion of topics for future work.
2 Related Work
Existing approaches for reflective symmetry detection have mainly focused on findingperfect symmetries of a 2D or 3D model [6, 7]. For instance, early work in this area isbased on efficient substring matching algorithms (e.g., [16]). However, since substringmatching is inherently a binary question, these algorithms can only find perfect sym-metries and are highly unstable in the presence of noise and imprecision; thus they arenot suitable for most shape registration and matching applications.
In the case of voxel grids, methods for symmetry detection have been proposed us-ing the covariance matrix [11, 12], taking advantage of the fact that eigenspaces of thecovariance matrix must be invariant under the symmetries of the model. These methodsare efficient and work in all dimensions but have the disadvantage that they only workwhen the eigenspaces of the covariance matrix are all one-dimensional. In the case ofthe cube, for example, the covariance matrix is a constant multiple of the identity, everyvector is an eigenvector, and no candidate axes of symmetry can be determined. Addi-tionally, the covariance matrix can only identify candidate axes and does not determinea measure of symmetry. So, further evaluation needs to be performed to establish thequality of these candidates as axes of symmetry. Methods for symmetry detection in2D using more complex moments and Fourier decomposition have also been described[8–10, 13], though their dependence on the ability to represent an image as a functionon the complex plane makes them difficult to generalize to three-dimensions.
In the work most similar to ours, Marola [8] presents a method for measuringsymmetry invariance of 2D images. However, because of its use of autocorrelation,the method cannot be extended directly to three-dimensional objects. In related work,Zabrodsky, Peleg and Avnir [2] define a continuous symmetry distance for point sets inany dimension. Unfortunately, it relies on the ability to first establish point correspon-dences, which is generally difficult. Additionally, while the method provides a way ofcomputing the symmetry distance for an individual plane of reflection, it does not pro-vide an efficient algorithm for characterizing a shape by its symmetry distances withrespect to multiple planes.
Our approach differs from previous work on symmetry detection in that we aim toconstruct a shape descriptor that can be used for registration, matching, and classifi-cation of 3D shapes based on their symmetries. The key idea is that the measure ofsymmetry with respect to any plane is an important feature of an object’s shape, even if

the plane does not correspond to a reflective symmetry of the shape. By capturing thisidea in a structure defined on a canonical parameterization, we can compare models bycomparing their symmetry descriptors. This basis for comparison provides a means forshape registration, matching, and classification. In this respect, our goals are similar topreviously described shape descriptors [17–20], of which some recent examples includespin images [21], harmonic shape images [22], shape contexts[23, 24], and ExtendedGaussian Images [25]. Similarly, our descriptor is related to several shape representa-tions that characterize symmetries with respect to local axes, such as medial axes [26],shock graphs [27], and skeletons [28, 29]. However, our reflective symmetry descriptordiffers from these structures in that it characterizes global symmetry features of a 3Dmodel, and thus it provides shape information orthogonal to these other descriptors.
In the following sections, we describe our methods for computing the reflectivesymmetry descriptor. There are two main challenges. First, we must describe a newnotion of symmetry distance that can be used to measure the invariance of a 3D voxelmodel with respect to reflection about any plane. Second, we must develop an algorithmfor computing the reflective symmetry descriptor that is more efficient than the bruteforce O(N 5), algorithm for N �N �N voxel grids.
3 Defining the Symmetry Distance
The first issue is to define a measure of symmetry for a 3D model with respect toreflection about a plane. While previous work has proposed symmetry measures for2D images and 3D point sets, we seek such a measure for 3D models based on a solidmathematical framework. This allows us to prove valuable properties of the descriptor.
We define the symmetry distance of a function with respect to a given plane ofreflection as the L2-distance to the nearest function that is invariant with respect to thereflection. Specifically, we treat a voxel model as a regular sampling of a function anduse the L2-norm on the space of functions. For a function f and a reflection thistranslates into the equation:
SD(f; ) = mingj (g)=g
kf � gk:
Using the facts that the space of functions is an inner product space and that the func-tions that are invariant to reflection about define a vector subspace, it follows that thenearest invariant function g is precisely the projection of f onto the subspace of invari-ant functions. That is, if we define � to be the projection onto the space of functionsinvariant under the action of and we define �? to be the projection onto the orthogonalsubspace then:
SD(f; ) = kf � � (f)j = k�? (f)kso that the symmetry distance of f with respect to is the length of the projection of fonto a subspace of functions indexed by .
In order to compute an explicit formulation of the projection of f onto the spaceof functions invariant under the action of , we observe that reflections are orthogo-nal transformations (that is, they preserve the inner product defined on the space offunctions). This lets us apply a theorem from representation theory [30] stating that a

projection of a vector onto the subspace invariant under the action of an orthogonalgroup is the average of the vector over the different elements in the group. Thus in thecase of a function f and a reflection we get:
SD(f; ) =
f � 1
2(f + (f))
=
f � (f)
2
(1)
so that up to a scale factor the symmetry distance is simply the L2-difference betweenthe initial function and its reflection.
As an example, Figure 2 demonstrates this process of projection by averaging. Theimage on the left shows a picture of Jackie Chan. The image on the right is the closestimage that is symmetric with respect to the gray line. It is obtained by averaging theoriginal with its reflection. The L2-difference between these two images is the mea-sure of the symmetry of the initial image with respect to reflection about the gray line.Equivalently, according to Equation 1, the symmetry distance is half the L 2-distancefrom the original image to its reflection.
Fig. 2. An image of Jackie Chan (left) and its projection onto the space of images invariant underreflection through the gray line (right). The image on the right is obtained by averaging the imageon the left with its reflection about the gray line.
4 Computing the Reflective Symmetry Descriptor
The second issue is to build a shape descriptor for a 3D model based on symmetry dis-tances. We define our reflective symmetry descriptor as a representation of the symme-try distances for all planes through the model’s center of mass. This definition capturesglobal symmetry information and can be parameterized on the domain of a sphere.
In order to use this reflective symmetry descriptor in practical applications, wemust develop efficient algorithms for computing it. A naive algorithm would explic-itly compute the symmetry distances in O(N 3) time for each of the O(N 2) planes inan N�N�N voxel model, requiringO(N 5) time overall. Our approach is to leveragethe Fast Fourier Transform to reduce the computation time to O(N 4 logN) and to usemultiresolution methods to provide a good approximation in O(N 3 logN).
We present our method for efficiently computing the reflective symmetry descriptorof a voxel grid in four steps. First, we show how the Fast Fourier Transform can beused to compute the reflective symmetries of a function defined on a circle efficiently(Section 4.1). Second, we show how the case of a function f defined on the unit disk

Fig. 3. Reflection about �
maps a point with angle � tothe point with angle 2�� �.
Fig. 4. The reflective symmetry descriptor of a 2D imagecan be obtained by decomposing the image into concentriccircles and computing the reflective symmetry descriptorson each of the circles.
can be reduced to the case of a function on a circle by decomposing f into a collectionof functions defined on concentric circles (Section 4.2). Third, through a collection ofmappings we show how to reduce the question of finding the symmetry descriptor ofa function on a sphere to the question of finding the symmetry desriptor for a functionon a disk (Section 4.3). Fourth, we show how the reflective symmetry descriptor of avoxel grid can be computed by decomposing the grid into a collection of concentricspheres and applying the methods for symmetry detection of functions defined on asphere (Section 4.4).
We conclude this section by describing a method for efficiently computing a mul-tiresolution approximation to the descriptor, which provides comparable quality at lowresolutions in far less time (Section 4.5).
4.1 Functions on a Circle
In order to define the reflective symmetry descriptor for a function on a circle we wouldlike to compute the symmetry distance for reflections about all lines through the originefficiently. In particular, for a given function f on the circle and any reflection wewould like to compute the measure of invariance of f with respect to . Denoting by � the reflection about the line through the origin with angle � and using the fact thatthis reflection maps a point with angle � to the point with angle 2� � � (see Figure 3)we can apply Equation 1 to obtain:
SD(f; �) =
vuuuutL2-normz }| {kfk22
�
convolution termz }| {Z 2�
0
f(�)f(2�� �)
2d�
This formulation provides an efficient method for computing the reflective symmetrydescriptor of a function defined on a unit circle because we can use the Fast FourierTransform to compute the value of the convolution term for all angles� inO(N log(N))time, where N represents the number of times f is sampled on the circle.

4.2 Functions on a Disk
As with functions on a circle, the reflective symmetry descriptor of a function on a diskis a mapping that associates to every angle � the measure of the invariance of the func-tion with respect to the reflection about the line with angle �. To compute the reflectivesymmetry descriptor we observe that these reflections fix circles of constant radius, andhence the symmetries of a function defined on a disk can be studied by looking at therestriction of the function to concentric circles. Figure 4 shows a visualization of thisprocess where the image of Superman is decomposed into concentric circles and thereflective symmetry descriptor of the image is computed by combining the reflectivesymmetry descriptors of the different circular functions.
To make this observation explicit we reparameterize the function f(x; y) into polarcoordinates to get the collection of functions f ~frg with:
~fr(�) = f(r cos �; r sin �);
where r 2 [0; 1] and � 2 [0; 2�], and we set � to be the reflection about the linethrough the origin with angle �. Using Equation 1 and applying the appropriate changeof variables we get:
SD(f; �) =
sZ 1
0
SD2( ~fr; �)rdr
showing that we can take advantage of the efficient method for computing the reflectivesymmetry descriptor of a function on the circle to obtain an O(N 2 logN) algorithm forcomputing the reflective symmetry descriptor of an N �N image.
This method is similar to the method presented in the works of Marola and Sun et al.[8, 10] in its use of autocorrelation as a tool for reflective symmetry detection. The ad-vantage of our formulation is that it describes the relationship between autocorrelationand an explicit notion of symmetry distance, defined by the L 2 inner-product of theunderlying space of functions, and provides a method for generalizing the definition ofsymmetry distance to 3D.
4.3 Functions on a Sphere
The reflective symmetry descriptor of a function defined on the surface of a sphere isa mapping that gives the measure of reflective invariance of a model with respect toreflections about every plane through the origin. To compute the reflective symmetrydescriptor of a function on a sphere we fix a North pole and restrict our attention tothose planes passing through it. The values of the reflective symmetry descriptor forthe restricted set of reflections can be efficiently computed by breaking up the func-tion into its restrictions to the upper and lower hemisphere and projecting each of theserestrictions to a disk. Figure 5(left) shows a visualization of this process for the restric-tion to the upper hemisphere. Note that reflections through planes containing the Northpole map the upper hemisphere to itself and correspond to reflections about lines in theprojected function.
In particular if we parameterize the sphere in terms of spherical coordinates:
�(�; �) =�cos�; sin� cos �; sin� sin �
�

Fig. 5. To compute the reflective symmetry descriptor of a function defined on the sphere forplanes passing through the North pole we observe that these planar reflections correspond toreflections about lines in the projected functions (left). We observe that a great circle must inter-sect every plane through the origin (right) so letting the North pole vary over a great circle andcomputing the projection at every step we obtain the symmetry distance for all planes.
with � 2 [0; �] and � 2 [0; 2�], the restriction to the upper hemisphere correspondsto the restriction � 2 [0; �=2]. Unfolding the restriction of f to the upper hemispherealong lines of constant latitude gives a function ~fu defined on a disk of radius �=2:
~fu(� cos �; � sin �) = f (�(�; �))
ssin�
�:
We can obtain ~fl, the projection of the lower hemisphere, in a similar fashion. Letting � represent both the reflection of the sphere about the plane through the North polewith constant angle of longitude � and the reflection of the disk about the line withangle � we get:
SD(f; �) =
qSD2( ~fu; �) + SD2( ~fl; �)
so that with the correct parameterization and scaling of the projections, the symmetrydistance for the reflection � can be obtained from the symmetry distances of the pro-jections of f . (Note that rather than doing a true projection onto the plane perpendicularto the North pole, we actually unfold the hemisphere in terms of its angles of latitude.This allows us to avoid the sampling problems that would otherwise result due to avanishing Jacobian near the boundary of the disk.)
In order to compute the value of the reflective symmetry desciptor for all planesthrough the origin, not just those passing through the North pole, we use the fact that ifwe fix a great circle on the sphere, any plane through the origin must intersect the greatcircle in at least two points (Figure 5(right)). This allows us to compute the values of thereflective symmetry descriptor for all planes by walking (half of) the great circle and ateach point projecting onto a disk to compute the measure of symmetries for those planescontaining the current North pole. Since the symmetry descriptor of the projection ontoa disk can be computed in O(N 2 logN) and since we preform O(N) such projections,this method gives an O(N 3 logN) algorithm for computing the reflective symmetrydescriptor of a function on the sphere, sampled at O(N 2) points.

4.4 Functions on a Voxel Grid
As with a function defined on a sphere, the reflective symmetry descriptor of a voxelmodel is a function that gives the measure of invariance of the model with respect toreflection about every plane through the origin, where we assume that the model’s cen-ter of mass has been translated to the origin. As in Section 4.2, we can use the fact thatreflections fix lengths to transform the problem of computing the reflective symmetrydescriptor of a voxel grid into a problem of computing the reflective symmetry descrip-tors of a collection of functions defined on a sphere. In particular, if f is a functiondefined on the set of points with radius less than or equal to 1 then we can decompose finto a collection of functions f ~frg where ~fr is a function defined on the unit sphere and~fr(v) = f(rv). After changing variables, the measure of symmetry of f with respectto a reflection becomes:
SD(f; ) =
sZ 1
0
SD2( ~fr; )r2dr
and we obtain the value of the symmetry descriptor of f as a combination of the val-ues of the symmetry descriptors of the spherical functions f ~frg, giving a method forcomputing the reflective symmetry descriptor of an N�N�N model in O(N 4 logN).
4.5 Multiresolution Approximation
Our algorithm for computing the reflective symmetry descriptor takes O(N 4 logN)time at full resolution. However, using Fourier decomposion of the restriction of thefunction to lines through the origin, we are able to compute a good multiresolutionapproximation to it in O(N 3 logN) time. This approximation is useful in most appli-cations because symmetry describes global features of a model and is apparent even atlow resolutions. Given a function f defined on the set of points with radius less than orequal to 1 we decompose f into the collection of one-dimensional functions by fixingrays through the origin and considering the restriction of f to these rays. This givesa collection of functions f ~fvg, indexed by unit vectors v, with ~fv(t) = f(tv)t andt 2 [0; 1]. Expanding the functions ~fv in terms of their trigonometric series we get:
~fv(t) = a0(v) +
1Xk=1
�ak(v)
cos(2k�t)p2
+ bk(v)sin(2k�t)p
2
�:
The advantage of this decomposition is that the functions ak(v) and bk(v) are functionsdefined on the sphere, providing a multiresolution description of the initial function f .Applying the appropriate change of variables and letting denote a reflection about aplane through the origin we get:
SD(f; ) =
vuutSD2(a0; ) +1Xk=1
�SD2(ak; ) + SD2(bk; )
�:
Thus a lower bound approximation to the reflective symmetry descriptor can be ob-tained in O(N 3 logN) time by only using the first few of the functions ak and bk.

(a) Voxel Model(128x128x128)
(b) 4 coef(12 sec)
(c) 8 coef(14 sec)
(d) 32 coef(31 sec)
(e) 128 coef(122 sec)
Fig. 6. (a) A 1957 Chevrolet model, (b-d) the approximations of its symmetry descriptor usingthe first 4, 8, and 32 spherical coefficient functions, and (e) the descriptor at full resolution.
The advantage of this multiresolution decomposition is that for binary voxel modelswe can show that the approximations converge quickly to the true value of the reflectivesymmetry descriptor at every point. In particular, if c represents the complexity of themodel (i.e. the number of times a line through the origin will enter and exit the shape)then the approximation using only the first k Fourier coefficient functions differs fromthe true reflective symmetry descriptor in proportion to c=k. (This follows from thefact that if g(t) is the characteristic function of c disjoint segments contained on theinterval [0; 2�] then
Rsin(2k�t)g(t)dt � c=k.) This result is demonstrated empirically
in Figure 6(b-e), which shows the symmetry descriptor computed for a Chevrolet us-ing 4, 8, 32, and 128 Fourier coefficient functions, respectively. Note that using onlythe first eight Fourier coefficient functions results in an approximation that is barelydistinguishable from the higher resolution versions.
5 Additional Properties of the Reflective Symmetry Descriptor
In addition to being a function that is both parameterized over a canonical domain anddescribes a model in terms of its symmetries, the reflective symmetry descriptor hasprovable properties valuable for shape analysis:
Stability: The reflective symmetry descriptor is stable in the presence of high-frequencynoise. To see this, we rewrite the reflective symmetry descriptor of a function f , definedon a circle, in terms of its Fourier coefficients:
SD(f; �) =
s1
2
Xk
(kakk2 + a2kei2k�):
This equation demonstrates that the contribution of different frequencies to the reflec-tive symmetry descriptor depends only on their Fourier coefficients. In contrast, shapedescriptors that involve computation of model derivatives, either as normals or gradi-ents [25, 10], have the property of amplifying the contribution of high-frequency com-ponents, making them unstable in the presence of high-frequency noise.
Globality: The differences in the reflective symmetry descriptors of two different mod-els at a single point provides a lower bound for the overall similarity of the two models.

The proof of this bound derives from the fact that the symmetry distance of a functionf with respect to a reflection is defined as the length of the projection �? (f) (Sec-tion 3). Since we know that for any orthogonal projection � and any vectors v and wwe have kvk � k�(v)k and kv � wk � ��kvk � kwk�� it follows that:
kf � gk ���k�? (f)k � k�? (g)k
�� = jSD(f; )� SD(g; )j
so that the difference in the values of two symmetry descriptors at a single point pro-vides a lower bound for the L2-difference of the corresponding models.
6 Results
In this section, we show the reflective symmetry descriptors of a wide variety of modelsand demonstrate the efficacy of the descriptor as a shape analysis tool by showing howmodels can be registered and classified using the descriptor.
6.1 Test Database
Our test database consisted of 90 polygonal models categorized by a third party into 24different classes. Using a simple rasterization method, the interior of each model wasvoxelized into a 128� 128� 128 grid.
Figures 7 and 8 show a number of models from the test database with their corre-sponding reflective symmetry descriptors. The full symmetry descriptor for each modelwas computed in 122 seconds on an 800 MHz Athlon processor with 512 MB of RAM.Note that the descriptors vary from model to model, with different patterns of undula-tions and sharp peaks, demonstrating that the symmetry descriptor is a rich function,capable of describing large amounts of information about shape.
Fig. 7. A number of models from different classes with their reflective symmetry descriptors,demonstrating the variability and richness of the descriptor.
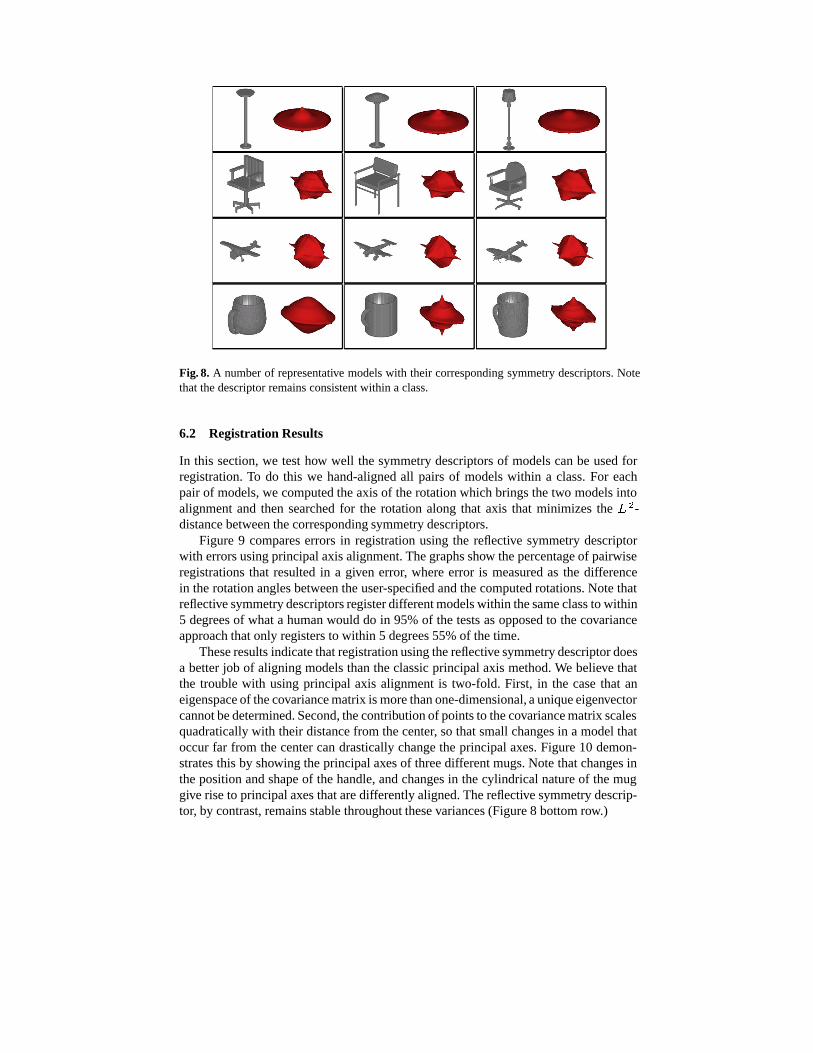
Fig. 8. A number of representative models with their corresponding symmetry descriptors. Notethat the descriptor remains consistent within a class.
6.2 Registration Results
In this section, we test how well the symmetry descriptors of models can be used forregistration. To do this we hand-aligned all pairs of models within a class. For eachpair of models, we computed the axis of the rotation which brings the two models intoalignment and then searched for the rotation along that axis that minimizes the L 2-distance between the corresponding symmetry descriptors.
Figure 9 compares errors in registration using the reflective symmetry descriptorwith errors using principal axis alignment. The graphs show the percentage of pairwiseregistrations that resulted in a given error, where error is measured as the differencein the rotation angles between the user-specified and the computed rotations. Note thatreflective symmetry descriptors register different models within the same class to within5 degrees of what a human would do in 95% of the tests as opposed to the covarianceapproach that only registers to within 5 degrees 55% of the time.
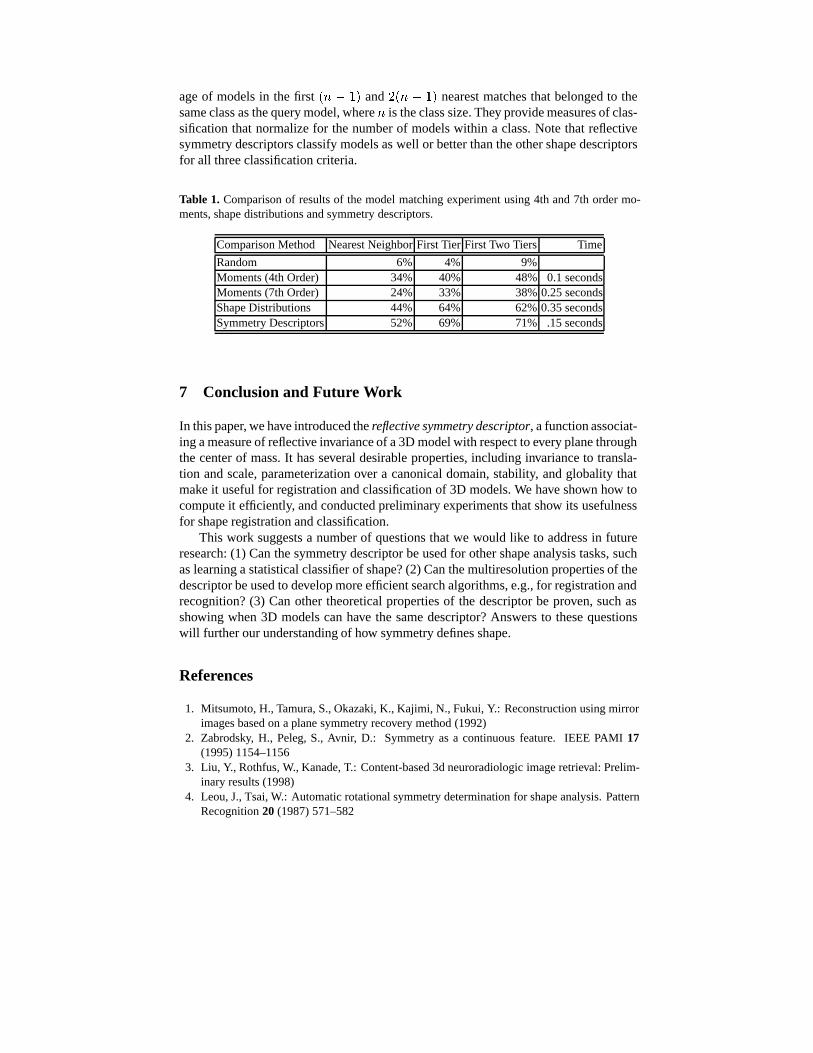
These results indicate that registration using the reflective symmetry descriptor doesa better job of aligning models than the classic principal axis method. We believe thatthe trouble with using principal axis alignment is two-fold. First, in the case that aneigenspace of the covariance matrix is more than one-dimensional, a unique eigenvectorcannot be determined. Second, the contribution of points to the covariance matrix scalesquadratically with their distance from the center, so that small changes in a model thatoccur far from the center can drastically change the principal axes. Figure 10 demon-strates this by showing the principal axes of three different mugs. Note that changes inthe position and shape of the handle, and changes in the cylindrical nature of the muggive rise to principal axes that are differently aligned. The reflective symmetry descrip-tor, by contrast, remains stable throughout these variances (Figure 8 bottom row.)
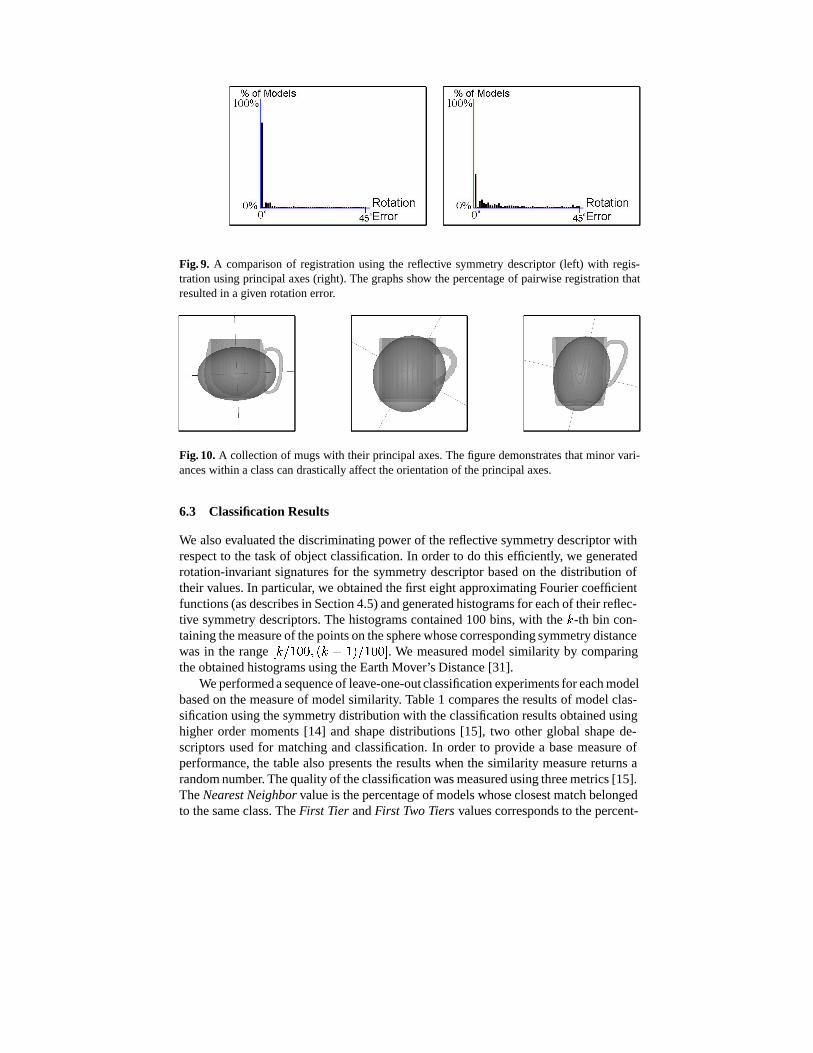
Fig. 9. A comparison of registration using the reflective symmetry descriptor (left) with regis-tration using principal axes (right). The graphs show the percentage of pairwise registration thatresulted in a given rotation error.
Fig. 10. A collection of mugs with their principal axes. The figure demonstrates that minor vari-ances within a class can drastically affect the orientation of the principal axes.
6.3 Classification Results
We also evaluated the discriminating power of the reflective symmetry descriptor withrespect to the task of object classification. In order to do this efficiently, we generatedrotation-invariant signatures for the symmetry descriptor based on the distribution oftheir values. In particular, we obtained the first eight approximating Fourier coefficientfunctions (as describes in Section 4.5) and generated histograms for each of their reflec-tive symmetry descriptors. The histograms contained 100 bins, with the k-th bin con-taining the measure of the points on the sphere whose corresponding symmetry distancewas in the range [k=100; (k + 1)=100]. We measured model similarity by comparingthe obtained histograms using the Earth Mover’s Distance [31].
We performed a sequence of leave-one-out classification experiments for each modelbased on the measure of model similarity. Table 1 compares the results of model clas-sification using the symmetry distribution with the classification results obtained usinghigher order moments [14] and shape distributions [15], two other global shape de-scriptors used for matching and classification. In order to provide a base measure ofperformance, the table also presents the results when the similarity measure returns arandom number. The quality of the classification was measured using three metrics [15].The Nearest Neighbor value is the percentage of models whose closest match belongedto the same class. The First Tier and First Two Tiers values corresponds to the percent-
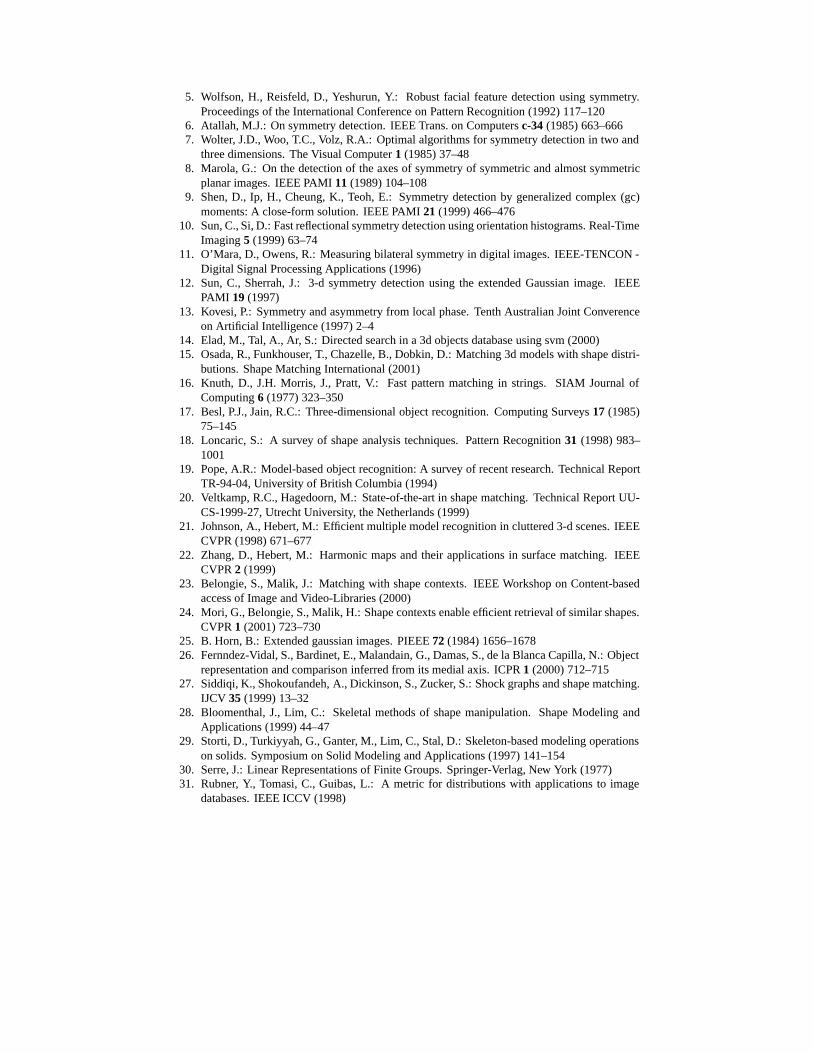
age of models in the first (n � 1) and 2(n � 1) nearest matches that belonged to thesame class as the query model, where n is the class size. They provide measures of clas-sification that normalize for the number of models within a class. Note that reflectivesymmetry descriptors classify models as well or better than the other shape descriptorsfor all three classification criteria.
Table 1. Comparison of results of the model matching experiment using 4th and 7th order mo-ments, shape distributions and symmetry descriptors.
Comparison Method Nearest Neighbor First Tier First Two Tiers Time
Random 6% 4% 9%Moments (4th Order) 34% 40% 48% 0.1 secondsMoments (7th Order) 24% 33% 38% 0.25 secondsShape Distributions 44% 64% 62% 0.35 secondsSymmetry Descriptors 52% 69% 71% .15 seconds
7 Conclusion and Future Work
In this paper, we have introduced the reflective symmetry descriptor, a function associat-ing a measure of reflective invariance of a 3D model with respect to every plane throughthe center of mass. It has several desirable properties, including invariance to transla-tion and scale, parameterization over a canonical domain, stability, and globality thatmake it useful for registration and classification of 3D models. We have shown how tocompute it efficiently, and conducted preliminary experiments that show its usefulnessfor shape registration and classification.
This work suggests a number of questions that we would like to address in futureresearch: (1) Can the symmetry descriptor be used for other shape analysis tasks, suchas learning a statistical classifier of shape? (2) Can the multiresolution properties of thedescriptor be used to develop more efficient search algorithms, e.g., for registration andrecognition? (3) Can other theoretical properties of the descriptor be proven, such asshowing when 3D models can have the same descriptor? Answers to these questionswill further our understanding of how symmetry defines shape.
References
1. Mitsumoto, H., Tamura, S., Okazaki, K., Kajimi, N., Fukui, Y.: Reconstruction using mirrorimages based on a plane symmetry recovery method (1992)
2. Zabrodsky, H., Peleg, S., Avnir, D.: Symmetry as a continuous feature. IEEE PAMI 17(1995) 1154–1156
3. Liu, Y., Rothfus, W., Kanade, T.: Content-based 3d neuroradiologic image retrieval: Prelim-inary results (1998)
4. Leou, J., Tsai, W.: Automatic rotational symmetry determination for shape analysis. PatternRecognition 20 (1987) 571–582
5. Wolfson, H., Reisfeld, D., Yeshurun, Y.: Robust facial feature detection using symmetry.Proceedings of the International Conference on Pattern Recognition (1992) 117–120
6. Atallah, M.J.: On symmetry detection. IEEE Trans. on Computers c-34 (1985) 663–6667. Wolter, J.D., Woo, T.C., Volz, R.A.: Optimal algorithms for symmetry detection in two and
three dimensions. The Visual Computer 1 (1985) 37–488. Marola, G.: On the detection of the axes of symmetry of symmetric and almost symmetric
planar images. IEEE PAMI 11 (1989) 104–1089. Shen, D., Ip, H., Cheung, K., Teoh, E.: Symmetry detection by generalized complex (gc)
moments: A close-form solution. IEEE PAMI 21 (1999) 466–47610. Sun, C., Si, D.: Fast reflectional symmetry detection using orientation histograms. Real-Time
Imaging 5 (1999) 63–7411. O’Mara, D., Owens, R.: Measuring bilateral symmetry in digital images. IEEE-TENCON -
Digital Signal Processing Applications (1996)12. Sun, C., Sherrah, J.: 3-d symmetry detection using the extended Gaussian image. IEEE
PAMI 19 (1997)13. Kovesi, P.: Symmetry and asymmetry from local phase. Tenth Australian Joint Converence
on Artificial Intelligence (1997) 2–414. Elad, M., Tal, A., Ar, S.: Directed search in a 3d objects database using svm (2000)15. Osada, R., Funkhouser, T., Chazelle, B., Dobkin, D.: Matching 3d models with shape distri-
butions. Shape Matching International (2001)16. Knuth, D., J.H. Morris, J., Pratt, V.: Fast pattern matching in strings. SIAM Journal of
Computing 6 (1977) 323–35017. Besl, P.J., Jain, R.C.: Three-dimensional object recognition. Computing Surveys 17 (1985)
75–14518. Loncaric, S.: A survey of shape analysis techniques. Pattern Recognition 31 (1998) 983–
100119. Pope, A.R.: Model-based object recognition: A survey of recent research. Technical Report
TR-94-04, University of British Columbia (1994)20. Veltkamp, R.C., Hagedoorn, M.: State-of-the-art in shape matching. Technical Report UU-
CS-1999-27, Utrecht University, the Netherlands (1999)21. Johnson, A., Hebert, M.: Efficient multiple model recognition in cluttered 3-d scenes. IEEE
CVPR (1998) 671–67722. Zhang, D., Hebert, M.: Harmonic maps and their applications in surface matching. IEEE
CVPR 2 (1999)23. Belongie, S., Malik, J.: Matching with shape contexts. IEEE Workshop on Content-based
access of Image and Video-Libraries (2000)24. Mori, G., Belongie, S., Malik, H.: Shape contexts enable efficient retrieval of similar shapes.
CVPR 1 (2001) 723–73025. B. Horn, B.: Extended gaussian images. PIEEE 72 (1984) 1656–167826. Fernndez-Vidal, S., Bardinet, E., Malandain, G., Damas, S., de la Blanca Capilla, N.: Object
representation and comparison inferred from its medial axis. ICPR 1 (2000) 712–71527. Siddiqi, K., Shokoufandeh, A., Dickinson, S., Zucker, S.: Shock graphs and shape matching.
IJCV 35 (1999) 13–3228. Bloomenthal, J., Lim, C.: Skeletal methods of shape manipulation. Shape Modeling and
Applications (1999) 44–4729. Storti, D., Turkiyyah, G., Ganter, M., Lim, C., Stal, D.: Skeleton-based modeling operations
on solids. Symposium on Solid Modeling and Applications (1997) 141–15430. Serre, J.: Linear Representations of Finite Groups. Springer-Verlag, New York (1977)31. Rubner, Y., Tomasi, C., Guibas, L.: A metric for distributions with applications to image
databases. IEEE ICCV (1998)





























