Embed Size (px)
Citation preview

A hybrid haptic guidance model for tank gunners in highprecision and high speed motor skill training
Guanyang Liu & Yuru Zhang & Keke Lu & Lingzhi Liu
# Springer Science+Business Media, LLC 2012
Abstract Haptic-based paradigms for human motor skill training which include virtualfixture, record-play method, shared control scheme and haptic disturbance have beenproposed and widely used for applications like surgery, assembly, rehabilitation, motor skilland so on. However, no haptic-based training scheme applies to all types of human motorskills that new ideas and new approaches should be explored for some special training tasks.For example, tank gunners have to be rigorously trained to be able to complete the mostaccurate manipulation in the shortest possible time. Accuracy and operating speed are bothcritical for them to grasp the skill; therefore, tank gunnery is defined as a type of highprecision and high speed human motor skill. In this paper, a hybrid spring-damper modelwhich fuses haptic fixture and record-play is presented to simultaneously train accuracy andoperating speed. The training approach is suitable for novices at all levels since forcefeedback is decomposed into two components: one for training accuracy, the other fortraining speed. The virtual envelope depicting is chosen as the training task for novices tovalidate the effectiveness of the proposed haptic-based scheme in high precision and highspeed skill training. Experimental results indicate that force feedback generated based on thehybrid model can benefit novices in fast improving performances on tank gunnery.
Keywords Haptic . High precision and high speed . Haptic-based training paradigm . Humanmotor skill training . Virtual envelope depicting
1 Introduction
Haptic feedback has been applied to human motor skill training, which can provide benefitsover visual-only display in the fields like surgery [3, 4, 6], rehabilitation [11, 14], assembly[2], robot-assisted manipulation [16, 18, 20, 26], and motor skill [7, 10, 12, 19, 25]. Various
Multimed Tools ApplDOI 10.1007/s11042-012-1179-9
G. Liu (*) : Y. Zhang :K. Lu : L. LiuState Key Laboratory of Virtual Reality Technology and Systems, Beihang University,Beijing 100191, Chinae-mail: [email protected]
G. Liu :Y. Zhang : K. Lu : L. LiuRobotics Institute, School of Mechanical Engineering and Automation, Beihang University,Beijing 100191, China

haptic paradigms for skill training have been proposed, which include virtual fixture, virtualteacher, shared control scheme, record-play and haptic disturbance.
L. Rosenberg [23] proposed the concept “virtual fixture” to keep subjects being awayfrom forbidden areas in a virtual environment. Shahram Payandeh [1] would exert forces tostop novices from deviating from an expected trajectory. The approach “virtual teacher” wasproposed by R. Brent Gillespie [9] that trainees could learn exactly what an expert did byreplaying the recorded information of the expert’s motion. Rodolfo Prada used virtual fixturein path-following task for cutting [22]. Marcia K. O’Malley [15, 21] proposed shared controlscheme to give a gradually changed guidance force based on the performance of a trainee toinduce the expected motion. Recently, Jaebong Lee proposed haptic disturbance that adisturbance in the force was given as an error magnification to participants instead ofguiding them [13]. This approach needs further verification from human psychologyexperiments.
Bayart et al. developed a four-step method for teaching and training with an adaptivehaptic guidance software module [5]. Among the above introduced training paradigms, themost common form is virtual fixture assisting a user in actively moving a manipulator alongdesired paths or prevents the manipulator from entering forbidden regions in the workspace.Another useful approach is record-play guiding a user to passively experience an ideal handmotion by lightly holding a haptic interface.
All the above introduced training schemes obey the law of human skill growth [8, 24]:skill learning, skill practice and skill correction. A trainee can be physically guided throughan ideal motion, thus giving the subject a kinesthetic understanding of what is required [7](the subjects get what to do). The subject can also trace an expert’s path actively. The hapticdevice can output guidance force if the subject cannot match the ideal path (the subjects gethow to do). In the process of skill training, a computer is considered as an expert and has tobe trained in advance.
Although these haptic paradigms have been successfully used for motor skill training indifferent fields, none of these approaches can meet the requirements of all human motorskills training. For example, racing, flying and tank gunnery which are defined as the highprecision and high speed operation require operators manipulating devices or equipments tocomplete tasks accurately and quickly. Any smallest error or time delay will definitely resultin failure (accident or defeated by others); therefore, they should be simultaneously trainedto possess very high operating accuracy and very fast operating speed.
Haptic fixture or record-play approach can guide novices to experience ideal hand motionor correct them in real-time. However, accuracy training and speed training is coupled withone model and cannot be distinguished from each other. The trainees who are good atoperating speed should focus on accuracy training. The trainees who are good at accuracyshould be specially trained to complete tasks more quickly. The trainees at bottom level haveto be strictly trained both at precision and operating speed.
The haptic-based training paradigm for high precision and high speed motor skill shouldapply to all novices at different levels. Accuracy training and speed training should not onlybe fused in the process of practice, also be clearly distinguished from each other. The outputforce of a haptic device should be decomposed into two independent components respec-tively for precision training and speed training, both of which can be clearly felt by a trainee.
In order to solve the conflict between speed training and accuracy training, wepropose a hybrid model combining haptic fixture and record-play approach to imple-ment accuracy training and speed training respectively and simultaneously [17].Experimental results validate the effectiveness of the proposed paradigm for novicesin tank gunnery skill training.
Multimed Tools Appl
2 Tank gunnery skill training
2.1 Haptic device
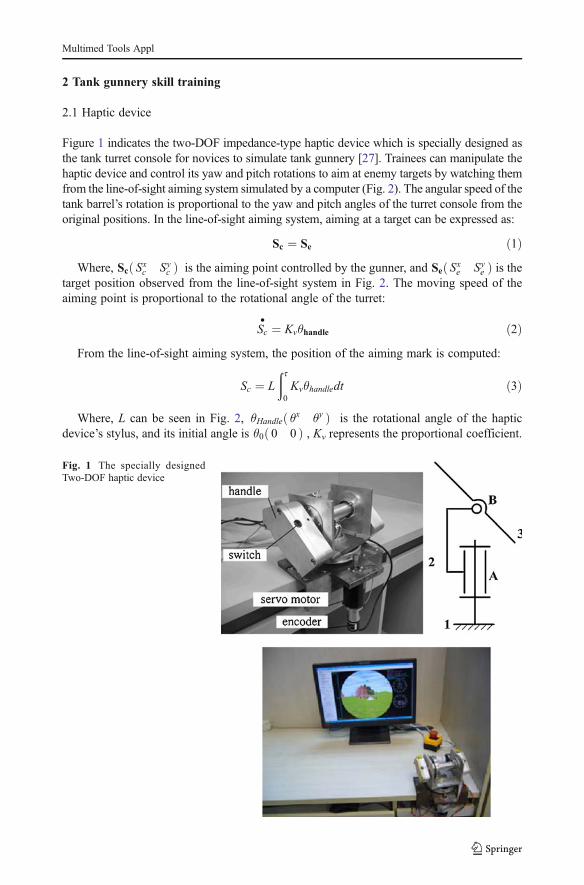
Figure 1 indicates the two-DOF impedance-type haptic device which is specially designed asthe tank turret console for novices to simulate tank gunnery [27]. Trainees can manipulate thehaptic device and control its yaw and pitch rotations to aim at enemy targets by watching themfrom the line-of-sight aiming system simulated by a computer (Fig. 2). The angular speed of thetank barrel’s rotation is proportional to the yaw and pitch angles of the turret console from theoriginal positions. In the line-of-sight aiming system, aiming at a target can be expressed as:
Sc ¼ Se ð1ÞWhere, Sc Sxc Sycð Þ is the aiming point controlled by the gunner, and Se Sxe Syeð Þ is the
target position observed from the line-of-sight system in Fig. 2. The moving speed of theaiming point is proportional to the rotational angle of the turret:
Sc�¼ Kvθhandle ð2Þ
From the line-of-sight aiming system, the position of the aiming mark is computed:
Sc ¼ Lðt0Kvθhandledt ð3Þ
Where, L can be seen in Fig. 2, θHandle θx θyð Þ is the rotational angle of the hapticdevice’s stylus, and its initial angle is θ0 0 0ð Þ , Kv represents the proportional coefficient.
Fig. 1 The specially designedTwo-DOF haptic device
Multimed Tools Appl
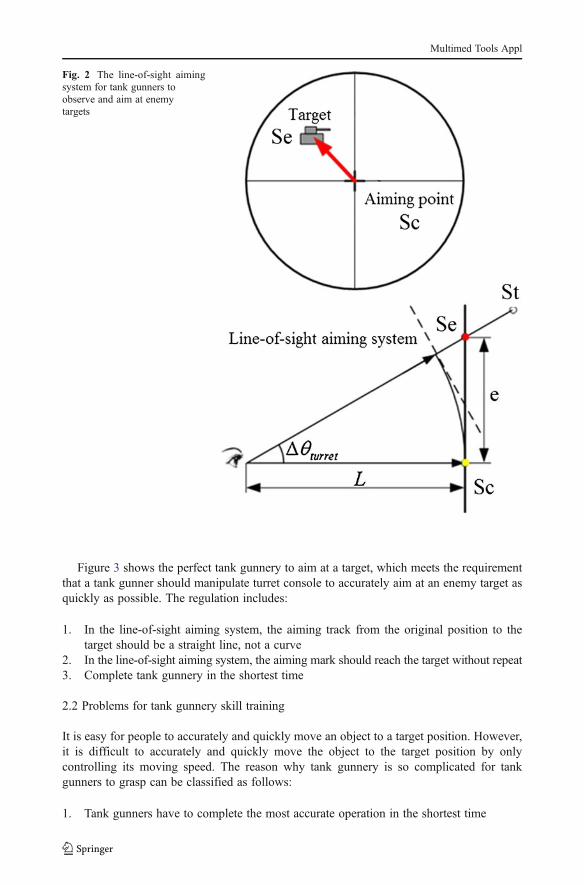
Figure 3 shows the perfect tank gunnery to aim at a target, which meets the requirementthat a tank gunner should manipulate turret console to accurately aim at an enemy target asquickly as possible. The regulation includes:
1. In the line-of-sight aiming system, the aiming track from the original position to thetarget should be a straight line, not a curve
2. In the line-of-sight aiming system, the aiming mark should reach the target without repeat3. Complete tank gunnery in the shortest time
2.2 Problems for tank gunnery skill training
It is easy for people to accurately and quickly move an object to a target position. However,it is difficult to accurately and quickly move the object to the target position by onlycontrolling its moving speed. The reason why tank gunnery is so complicated for tankgunners to grasp can be classified as follows:
1. Tank gunners have to complete the most accurate operation in the shortest time
Fig. 2 The line-of-sight aimingsystem for tank gunners toobserve and aim at enemytargets
Multimed Tools Appl
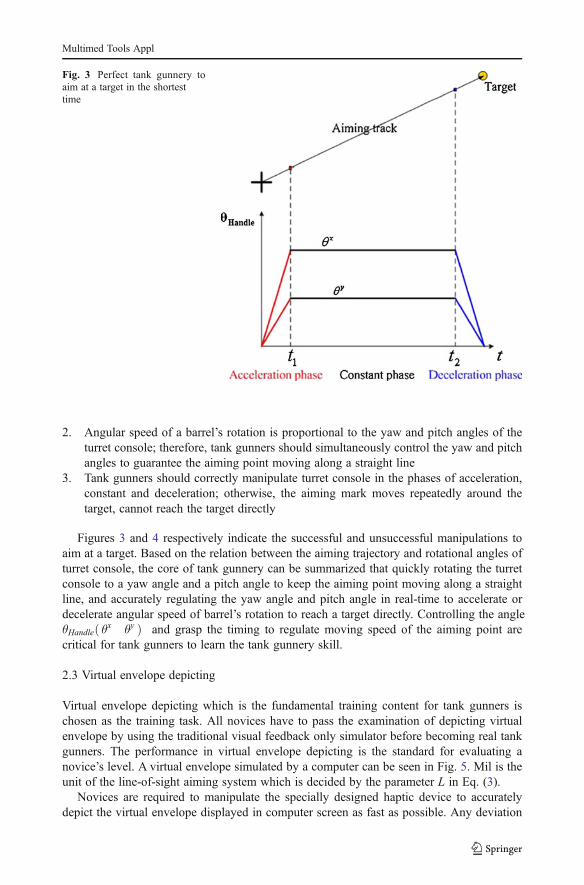
2. Angular speed of a barrel’s rotation is proportional to the yaw and pitch angles of theturret console; therefore, tank gunners should simultaneously control the yaw and pitchangles to guarantee the aiming point moving along a straight line
3. Tank gunners should correctly manipulate turret console in the phases of acceleration,constant and deceleration; otherwise, the aiming mark moves repeatedly around thetarget, cannot reach the target directly
Figures 3 and 4 respectively indicate the successful and unsuccessful manipulations toaim at a target. Based on the relation between the aiming trajectory and rotational angles ofturret console, the core of tank gunnery can be summarized that quickly rotating the turretconsole to a yaw angle and a pitch angle to keep the aiming point moving along a straightline, and accurately regulating the yaw angle and pitch angle in real-time to accelerate ordecelerate angular speed of barrel’s rotation to reach a target directly. Controlling the angleθHandle θx θyð Þ and grasp the timing to regulate moving speed of the aiming point arecritical for tank gunners to learn the tank gunnery skill.
2.3 Virtual envelope depicting
Virtual envelope depicting which is the fundamental training content for tank gunners ischosen as the training task. All novices have to pass the examination of depicting virtualenvelope by using the traditional visual feedback only simulator before becoming real tankgunners. The performance in virtual envelope depicting is the standard for evaluating anovice’s level. A virtual envelope simulated by a computer can be seen in Fig. 5. Mil is theunit of the line-of-sight aiming system which is decided by the parameter L in Eq. (3).
Novices are required to manipulate the specially designed haptic device to accuratelydepict the virtual envelope displayed in computer screen as fast as possible. Any deviation
Fig. 3 Perfect tank gunnery toaim at a target in the shortesttime
Multimed Tools Appl
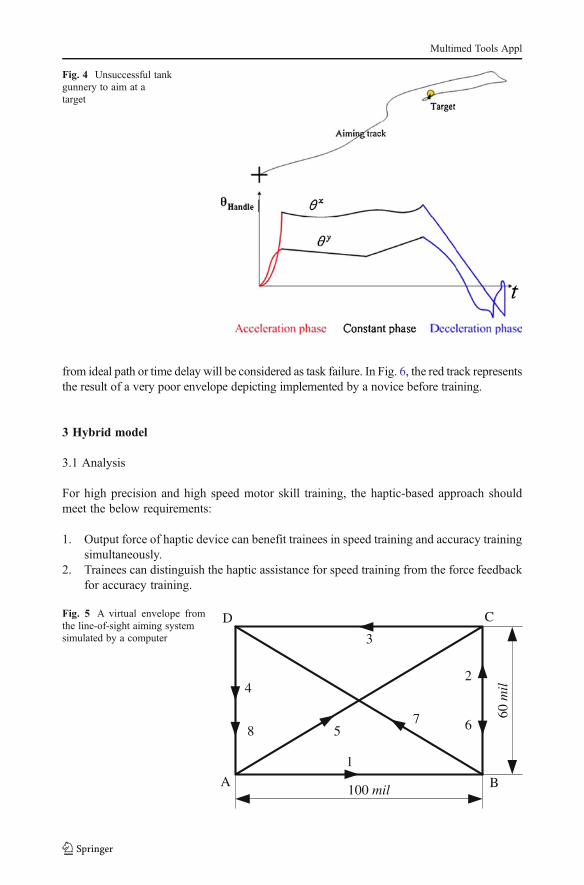
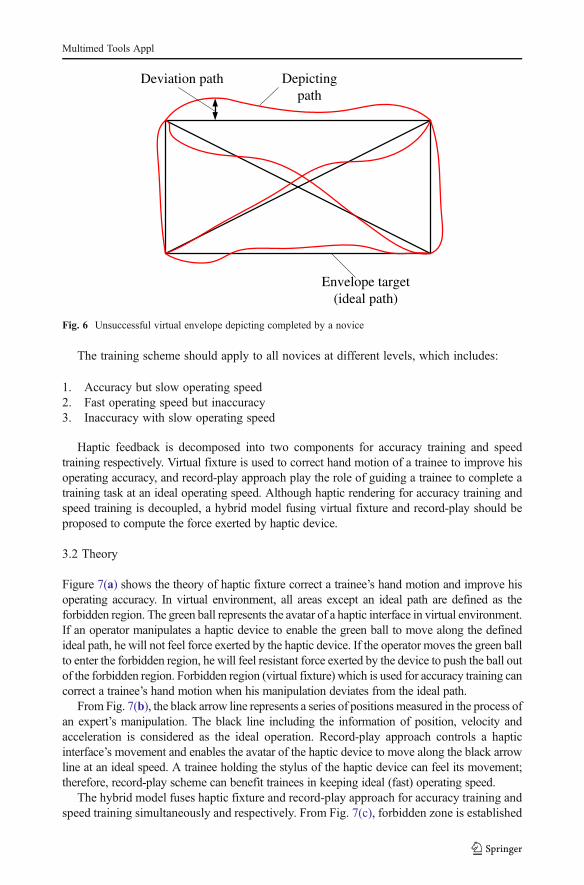
from ideal path or time delay will be considered as task failure. In Fig. 6, the red track representsthe result of a very poor envelope depicting implemented by a novice before training.
3 Hybrid model
3.1 Analysis
For high precision and high speed motor skill training, the haptic-based approach shouldmeet the below requirements:
1. Output force of haptic device can benefit trainees in speed training and accuracy trainingsimultaneously.
2. Trainees can distinguish the haptic assistance for speed training from the force feedbackfor accuracy training.
Fig. 4 Unsuccessful tankgunnery to aim at atarget
1
7 65
4
3
2
8
100 mil
60m
il
A
D C
B
Fig. 5 A virtual envelope fromthe line-of-sight aiming systemsimulated by a computer
Multimed Tools Appl
The training scheme should apply to all novices at different levels, which includes:
1. Accuracy but slow operating speed2. Fast operating speed but inaccuracy3. Inaccuracy with slow operating speed
Haptic feedback is decomposed into two components for accuracy training and speedtraining respectively. Virtual fixture is used to correct hand motion of a trainee to improve hisoperating accuracy, and record-play approach play the role of guiding a trainee to complete atraining task at an ideal operating speed. Although haptic rendering for accuracy training andspeed training is decoupled, a hybrid model fusing virtual fixture and record-play should beproposed to compute the force exerted by haptic device.
3.2 Theory
Figure 7(a) shows the theory of haptic fixture correct a trainee’s hand motion and improve hisoperating accuracy. In virtual environment, all areas except an ideal path are defined as theforbidden region. The green ball represents the avatar of a haptic interface in virtual environment.If an operator manipulates a haptic device to enable the green ball to move along the definedideal path, he will not feel force exerted by the haptic device. If the operator moves the green ballto enter the forbidden region, he will feel resistant force exerted by the device to push the ball outof the forbidden region. Forbidden region (virtual fixture) which is used for accuracy training cancorrect a trainee’s hand motion when his manipulation deviates from the ideal path.
From Fig. 7(b), the black arrow line represents a series of positions measured in the process ofan expert’s manipulation. The black line including the information of position, velocity andacceleration is considered as the ideal operation. Record-play approach controls a hapticinterface’s movement and enables the avatar of the haptic device to move along the black arrowline at an ideal speed. A trainee holding the stylus of the haptic device can feel its movement;therefore, record-play scheme can benefit trainees in keeping ideal (fast) operating speed.
The hybrid model fuses haptic fixture and record-play approach for accuracy training andspeed training simultaneously and respectively. From Fig. 7(c), forbidden zone is established
Envelope target(ideal path)
Depictingpath
Deviation path
Fig. 6 Unsuccessful virtual envelope depicting completed by a novice
Multimed Tools Appl
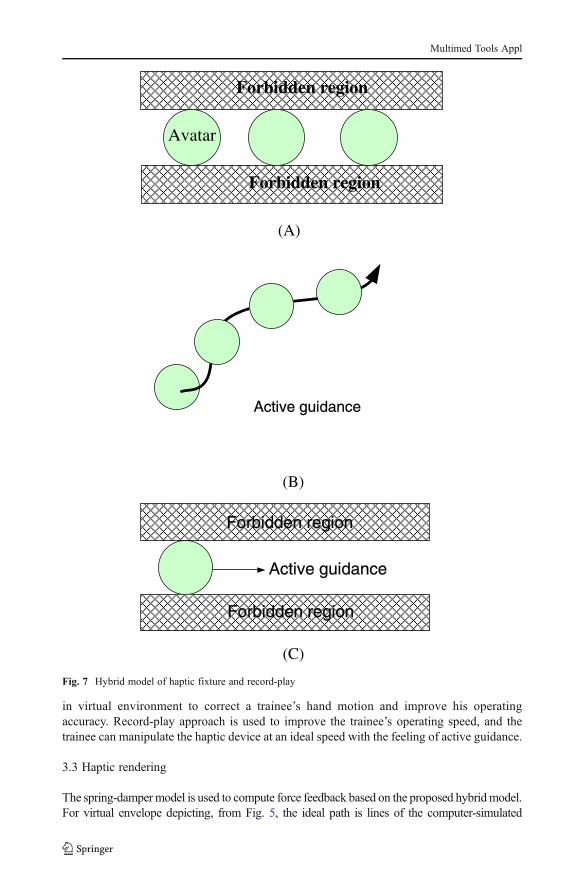
in virtual environment to correct a trainee’s hand motion and improve his operatingaccuracy. Record-play approach is used to improve the trainee’s operating speed, and thetrainee can manipulate the haptic device at an ideal speed with the feeling of active guidance.
3.3 Haptic rendering
The spring-dampermodel is used to compute force feedback based on the proposed hybridmodel.For virtual envelope depicting, from Fig. 5, the ideal path is lines of the computer-simulated
Avatar
Forbidden region
Forbidden region
(A)
Active guidance
(B)
Forbidden region
Forbidden region
Active guidance
(C)
Fig. 7 Hybrid model of haptic fixture and record-play
Multimed Tools Appl

envelope, which is decomposed into a series of discrete pointsPi. A databaseD(Pi,Vi) is created torecord the ideal manipulation information, in whichVi is the operating speed of an expert at eachdiscrete point. Pi andVi are acquired from the measure of an expert’s virtual envelope depicting athis highest level, which is defined as the ideal operation.
If a subject can manipulate the haptic device to depict the virtual envelope along the idealpath at an ideal speed without any error, the haptic device does not exert any force on him. Ifthe subject cannot complete the ideal operation, force F computed by the proposed modelwill be exerted by the haptic interface to correct his operation. The force F felt by theoperator is composed of guidance force Fg and forbidden region resistance Fc.
F ¼ Fc þ Fg ð4Þ
From Fig. 8, Q represents the deviation of the avatar from the ideal path, and it can becomputed:
Q ¼ Pi � Sc ð5Þ
Where, Pi is a point on the ideal path, and it is also the nearest point from the avatar atcurrent sampling period. All areas except the ideal path in the two-dimensional virtualenvironment are considered as forbidden region. The force Fc is computed:
Fc ¼ kQþ bs Q�� �
Qj j 6¼ 0
0 Qj j ¼ 0
8<: ð6Þ
Where, k is the spring’s stiffness, bs is the damping coefficient.Figure 9 shows the theory of guidance force computation. It is assumed that a subject
manipulates the haptic device to depict the virtual envelope on the ideal path with no error;however, his operating speed V is slower than the ideal speed Vi of the current position Pi,the force Fg is computed:
Fg ¼ bvR Vj j 6¼ Vij j0 Vj j ¼ Vij j
�ð7Þ
•QsbQk
cS
iPVirtual envelope
Fig. 8 Computation of forbidden region resistance
Multimed Tools Appl

R ¼ Vij j � Vj jVij j Vi ð8Þ
Where, bv is the damping coefficient. Whatever a trainee’s operating speed is faster orslower than the ideal speed, force Fg will assist him to regulate his hand motion tomanipulate the haptic device at the ideal speed.
Based on Eqs. (6) and (7), it can be seen that:
Fc � Fg ¼ 0 ð9ÞTherefore, the two components Fg and Fc of output force can be clearly distinguished by the
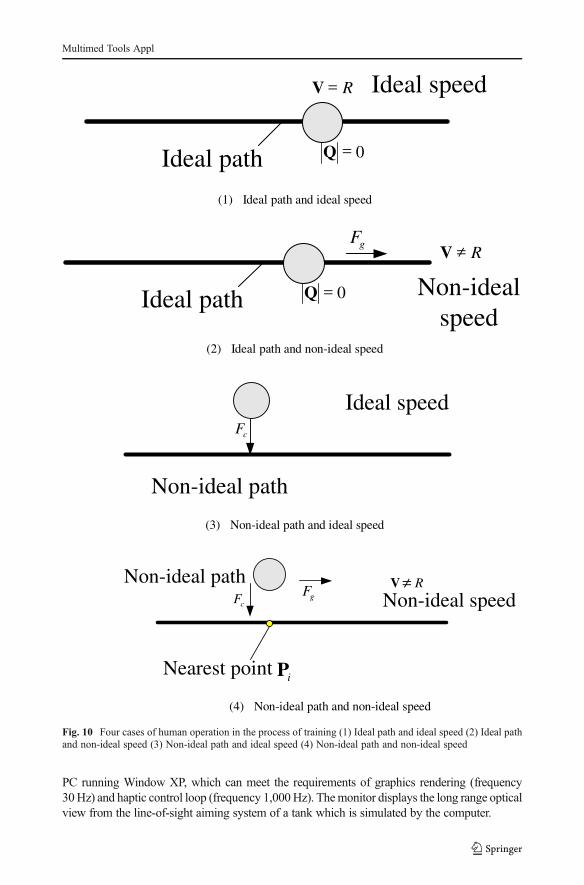
two different directions. A trainee’s manipulation can be classified into four categories (Fig. 10):
1. Ideal operation (ideal speed and ideal path):
F ¼ Fc ¼ Fg ¼ 02. Ideal path and non-ideal speed:
Fc ¼ 0 F ¼ Fg 6¼ 0
3. Ideal speed and non-ideal path:
Fg ¼ 0 F ¼ Fc 6¼ 0
4. Non-ideal path and non-ideal speed:
F ¼ Fc þ Fg 6¼ 0 Fc 6¼ 0 Fg 6¼ 0
4 Experiment
A haptic-based tank gunnery skill training system is developed to validate the proposedhybrid model; moreover, whether the haptic-based training scheme can achieve better effectthan traditional simulator does should also be discussed.
4.1 Haptic-based training system
From Fig. 11, the haptic-based training system consists of the specially designed haptic device, acomputer and a LCDmonitor. Device control and data acquisition are performed by the 2.4 GHz
RvbViV
Fig. 9 Computation of active guidance force
Multimed Tools Appl
PC running Window XP, which can meet the requirements of graphics rendering (frequency30Hz) and haptic control loop (frequency 1,000Hz). Themonitor displays the long range opticalview from the line-of-sight aiming system of a tank which is simulated by the computer.
Ideal path
RV Ideal speed
0Q
(1) Ideal path and ideal speed
Ideal path
gF
Non-idealspeed
0Q
RV
(2) Ideal path and non-ideal speed
Non-ideal path
cF
Ideal speed
(3) Non-ideal path and ideal speed
=
=
=
≠
Non-ideal pathcF gF Non-ideal speed
RV
Nearest pointiP
(4) Non-ideal path and non-ideal speed
≠
Fig. 10 Four cases of human operation in the process of training (1) Ideal path and ideal speed (2) Ideal pathand non-ideal speed (3) Non-ideal path and ideal speed (4) Non-ideal path and non-ideal speed
Multimed Tools Appl

Five experts are invited to take part in the experiment and complete virtual envelopedepicting by using the developed training system without haptic guidance more than twentytimes. Among these operations, the fastest one without any deviation error is considered asthe ideal manipulation. The database D(Pi,Vi) is created by reading data from two encodersof the haptic device, and the relation between Pi and Vi can be constructed.
4.2 Participants and training phases
Participants who are recruited to participate in this study on a voluntary basis with nomonetary compensation include seven men and three women. All participants who arerequired to receive virtual envelope depicting training are definitely not familiar with tankgunnery. The total training period is a week which is the same time for novices to receivevirtual envelope depicting training by using traditional visual feedback only simulators.
All subjects manipulate the haptic device to depict the envelope target displayed in thevirtual environment. Whether the device provides force feedback or not, participants have totry to follow the ideal path and complete the task as fast as possible.
The whole training process is divided into two components: test (without force feedback)and practice (with force feedback). Force feedback is composed of resistance to correct atrainee’s hand motion and guidance to improve a trainee’s operating speed. In case of test, aparticipant has to independently complete virtual envelope depicting without any hapticauxiliary. In case of practice, haptic device will exert force to benefit the user in improvingaccuracy and operating speed.
The training phase can be seen in Fig. 12. After a subject is taught how to manipulate thehaptic device, he will be tested to depict the virtual envelope without force feedback threetimes. Then, the trainee is required to complete five cycles of practice-rest-test. In eachtraining cycle, a trainee will be tested three times after sufficient haptic-based practice.Finally, one subject totally runs eighteen tests in 6 days.
Deviation from ideal path of all sampling periods and total spent time are used to evaluatea subject’s performance in virtual envelope depicting. In the whole process of experiment,each subject executes five phases of practice and six stages of test to depict the virtualenvelope more than 1,000 times.
4.3 Result analysis
The following data are compiled across all subjects: average deviation distance and spenttime. Average deviation means average value of deviation distances at all sampling periodsduring the process of an operation.
In Fig. 13, the six red lines respectively represent six medians of average deviations of allsubjects in six test phases. Top line and bottom line of each blue box represent two quartiles
Fig. 11 Haptic-based tank gunnery skill training system
Multimed Tools Appl
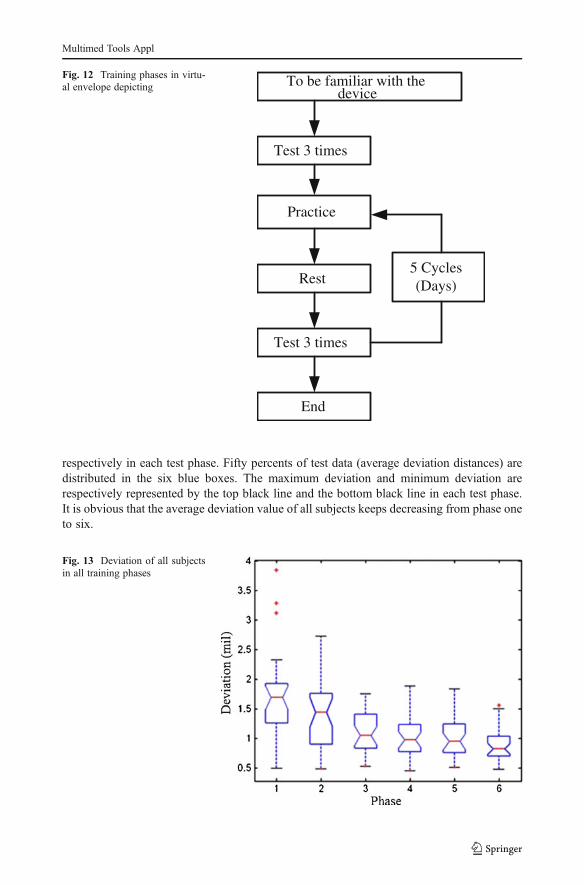
respectively in each test phase. Fifty percents of test data (average deviation distances) aredistributed in the six blue boxes. The maximum deviation and minimum deviation arerespectively represented by the top black line and the bottom black line in each test phase.It is obvious that the average deviation value of all subjects keeps decreasing from phase oneto six.
To be familiar with thedevice
Test 3 times
Practice
Rest
Test 3 times
End
5 Cycles(Days)
Fig. 12 Training phases in virtu-al envelope depicting
Fig. 13 Deviation of all subjectsin all training phases
Multimed Tools Appl
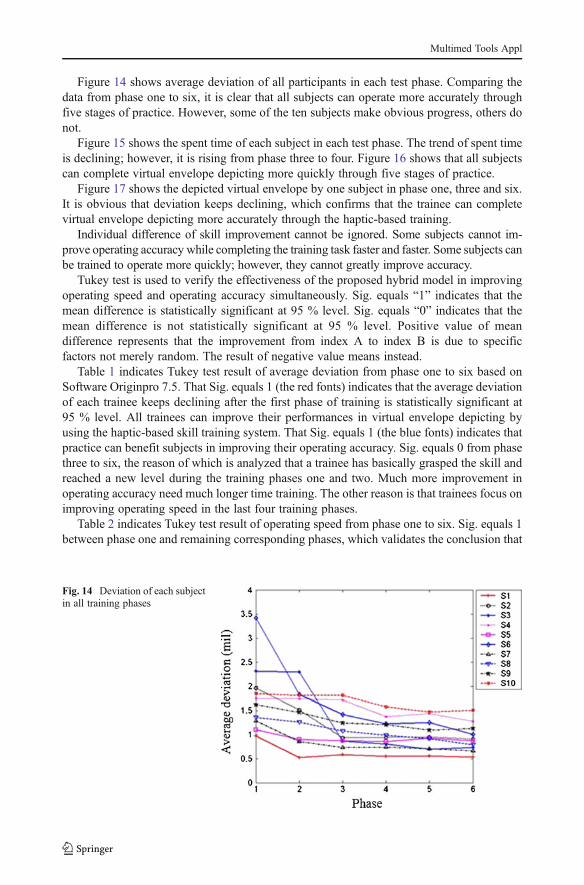
Figure 14 shows average deviation of all participants in each test phase. Comparing thedata from phase one to six, it is clear that all subjects can operate more accurately throughfive stages of practice. However, some of the ten subjects make obvious progress, others donot.
Figure 15 shows the spent time of each subject in each test phase. The trend of spent timeis declining; however, it is rising from phase three to four. Figure 16 shows that all subjectscan complete virtual envelope depicting more quickly through five stages of practice.
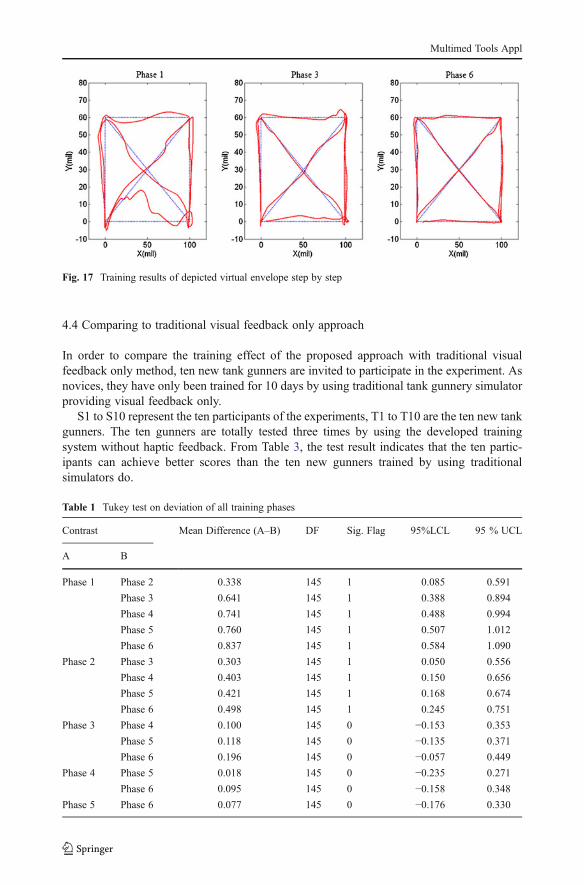
Figure 17 shows the depicted virtual envelope by one subject in phase one, three and six.It is obvious that deviation keeps declining, which confirms that the trainee can completevirtual envelope depicting more accurately through the haptic-based training.
Individual difference of skill improvement cannot be ignored. Some subjects cannot im-prove operating accuracy while completing the training task faster and faster. Some subjects canbe trained to operate more quickly; however, they cannot greatly improve accuracy.
Tukey test is used to verify the effectiveness of the proposed hybrid model in improvingoperating speed and operating accuracy simultaneously. Sig. equals “1” indicates that themean difference is statistically significant at 95 % level. Sig. equals “0” indicates that themean difference is not statistically significant at 95 % level. Positive value of meandifference represents that the improvement from index A to index B is due to specificfactors not merely random. The result of negative value means instead.
Table 1 indicates Tukey test result of average deviation from phase one to six based onSoftware Originpro 7.5. That Sig. equals 1 (the red fonts) indicates that the average deviationof each trainee keeps declining after the first phase of training is statistically significant at95 % level. All trainees can improve their performances in virtual envelope depicting byusing the haptic-based skill training system. That Sig. equals 1 (the blue fonts) indicates thatpractice can benefit subjects in improving their operating accuracy. Sig. equals 0 from phasethree to six, the reason of which is analyzed that a trainee has basically grasped the skill andreached a new level during the training phases one and two. Much more improvement inoperating accuracy need much longer time training. The other reason is that trainees focus onimproving operating speed in the last four training phases.
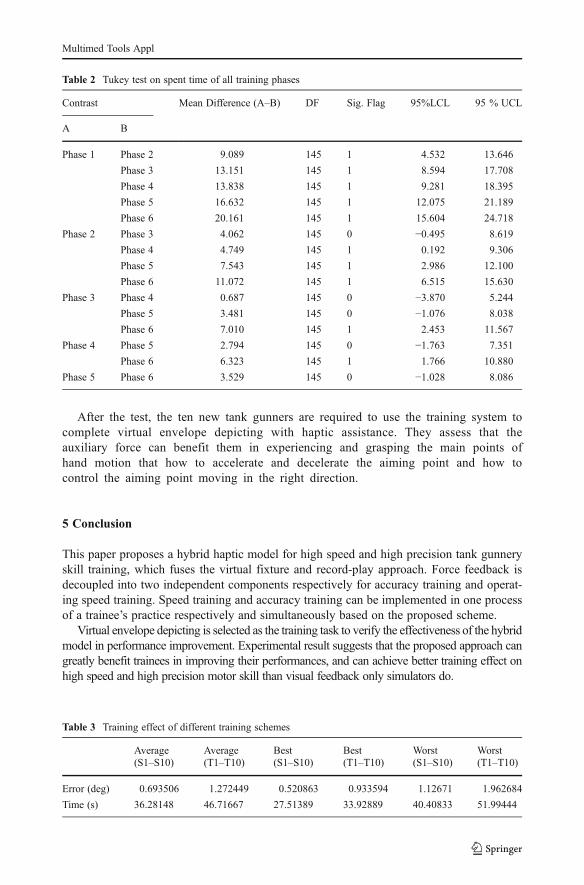
Table 2 indicates Tukey test result of operating speed from phase one to six. Sig. equals 1between phase one and remaining corresponding phases, which validates the conclusion that
Fig. 14 Deviation of each subjectin all training phases
Multimed Tools Appl
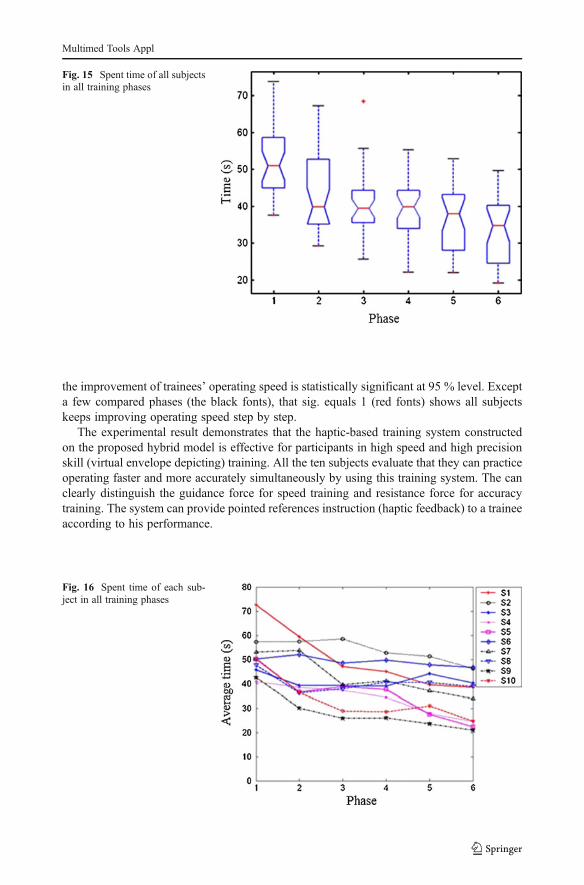
the improvement of trainees’ operating speed is statistically significant at 95 % level. Excepta few compared phases (the black fonts), that sig. equals 1 (red fonts) shows all subjectskeeps improving operating speed step by step.
The experimental result demonstrates that the haptic-based training system constructedon the proposed hybrid model is effective for participants in high speed and high precisionskill (virtual envelope depicting) training. All the ten subjects evaluate that they can practiceoperating faster and more accurately simultaneously by using this training system. The canclearly distinguish the guidance force for speed training and resistance force for accuracytraining. The system can provide pointed references instruction (haptic feedback) to a traineeaccording to his performance.
Fig. 15 Spent time of all subjectsin all training phases
Fig. 16 Spent time of each sub-ject in all training phases
Multimed Tools Appl
4.4 Comparing to traditional visual feedback only approach
In order to compare the training effect of the proposed approach with traditional visualfeedback only method, ten new tank gunners are invited to participate in the experiment. Asnovices, they have only been trained for 10 days by using traditional tank gunnery simulatorproviding visual feedback only.
S1 to S10 represent the ten participants of the experiments, T1 to T10 are the ten new tankgunners. The ten gunners are totally tested three times by using the developed trainingsystem without haptic feedback. From Table 3, the test result indicates that the ten partic-ipants can achieve better scores than the ten new gunners trained by using traditionalsimulators do.
Fig. 17 Training results of depicted virtual envelope step by step
Table 1 Tukey test on deviation of all training phases
Contrast Mean Difference (A–B) DF Sig. Flag 95%LCL 95 % UCL
A B
Phase 1 Phase 2 0.338 145 1 0.085 0.591
Phase 3 0.641 145 1 0.388 0.894
Phase 4 0.741 145 1 0.488 0.994
Phase 5 0.760 145 1 0.507 1.012
Phase 6 0.837 145 1 0.584 1.090
Phase 2 Phase 3 0.303 145 1 0.050 0.556
Phase 4 0.403 145 1 0.150 0.656
Phase 5 0.421 145 1 0.168 0.674
Phase 6 0.498 145 1 0.245 0.751
Phase 3 Phase 4 0.100 145 0 −0.153 0.353
Phase 5 0.118 145 0 −0.135 0.371
Phase 6 0.196 145 0 −0.057 0.449
Phase 4 Phase 5 0.018 145 0 −0.235 0.271
Phase 6 0.095 145 0 −0.158 0.348
Phase 5 Phase 6 0.077 145 0 −0.176 0.330
Multimed Tools Appl
After the test, the ten new tank gunners are required to use the training system tocomplete virtual envelope depicting with haptic assistance. They assess that theauxiliary force can benefit them in experiencing and grasping the main points ofhand motion that how to accelerate and decelerate the aiming point and how tocontrol the aiming point moving in the right direction.
5 Conclusion
This paper proposes a hybrid haptic model for high speed and high precision tank gunneryskill training, which fuses the virtual fixture and record-play approach. Force feedback isdecoupled into two independent components respectively for accuracy training and operat-ing speed training. Speed training and accuracy training can be implemented in one processof a trainee’s practice respectively and simultaneously based on the proposed scheme.
Virtual envelope depicting is selected as the training task to verify the effectiveness of the hybridmodel in performance improvement. Experimental result suggests that the proposed approach cangreatly benefit trainees in improving their performances, and can achieve better training effect onhigh speed and high precision motor skill than visual feedback only simulators do.
Table 2 Tukey test on spent time of all training phases
Contrast Mean Difference (A–B) DF Sig. Flag 95%LCL 95 % UCL
A B
Phase 1 Phase 2 9.089 145 1 4.532 13.646
Phase 3 13.151 145 1 8.594 17.708
Phase 4 13.838 145 1 9.281 18.395
Phase 5 16.632 145 1 12.075 21.189
Phase 6 20.161 145 1 15.604 24.718
Phase 2 Phase 3 4.062 145 0 −0.495 8.619
Phase 4 4.749 145 1 0.192 9.306
Phase 5 7.543 145 1 2.986 12.100
Phase 6 11.072 145 1 6.515 15.630
Phase 3 Phase 4 0.687 145 0 −3.870 5.244
Phase 5 3.481 145 0 −1.076 8.038
Phase 6 7.010 145 1 2.453 11.567
Phase 4 Phase 5 2.794 145 0 −1.763 7.351
Phase 6 6.323 145 1 1.766 10.880
Phase 5 Phase 6 3.529 145 0 −1.028 8.086
Table 3 Training effect of different training schemes
Average(S1–S10)
Average(T1–T10)
Best(S1–S10)
Best(T1–T10)
Worst(S1–S10)
Worst(T1–T10)
Error (deg) 0.693506 1.272449 0.520863 0.933594 1.12671 1.962684
Time (s) 36.28148 46.71667 27.51389 33.92889 40.40833 51.99444
Multimed Tools Appl
A networked haptic training system will be developed for tank gunners to implement“Hand in Hand” motor skill training, based on which an expert can correct a trainee’s handmotion in real-time.
Acknowledgment This research received support of National Science Foundation of China under grant No.60803070.
References
1. Abbott JJ, Marayong P, Okamura AM (2007) Haptic virtual fixtures for robot-assisted manipulation. Procof 12th Int Symp Robot Res 28:49–64
2. Adams JR, Clowden D, Hannaford B (2001) Virtual training for a manual assembly task. Haptics-e 2(2): 1–73. Basdogan C, De S, Kim J, Muniyandi M, Kim H, Srinivasan MA (2004) Haptics in minimally invasive
surgical simulation and training. IEEE Comput Graph Appl 24(2):56–644. Basdogan C, Ho C, Srinivasan MA (2001) Virtual environments for medical training: graphical and haptic
simulation of laparoscopic common bile duct exploration. IEEE Trans Mechatron 6(3):267–2855. Bayart B, Pocheville A, Kheddar A (2005) An adaptive haptic guidance software module for I-TOUCH: example
through a handwriting teaching simulation and a 3D maze. Proc Haptic Audio Vis Environ Appl: 51–566. Dang T, Annaswamy TM, Srinivasan MA (2001) Development and evaluation of an epidural injection
simulator with force feedback for medical training. Proc. Med Meets Virtual Reality 81:97–1027. Feygin D, Keehner M, Tendick F (2002) Haptic guidance: experimental evaluation of a haptic training
method for a perceptual motor skill. Proc. 10th Symposium on Haptic Interfaces for Virtual Environmentsand Tele-operator Systems 40–47
8. Fitts PM, Posner MI (1967) Human performance. Brooks/Cole, Belmont9. Gillespie RB, O’Modhrain M, Tang P, Zaretzky D, Pham C (1998) The virtual teacher. ASME IMECE-
DSC 64:171–17810. Grindlay G (2008) Haptic guidance benefits musical motor learning. Proc. of Symp Haptic Interfaces
Virtual Environ Teleoperator Syst: 397–40411. Gupta A, O’Malley MK (2006) Design of a haptic arm exoskeleton for training and rehabilitation. IEEE/
ASME Trans Mechatron 11(3):280–28912. Henmi K, Yoshikawa T (1998) Virtual lesson and its application to virtual calligraphy system. Proceed-
ings of the IEEE Int. Conf. Robot Autom: 1275–128013. Lee J, Choi S (2010) Effects of haptic guidance and disturbance on motor learning: potential advantage of
haptic disturbance. IEEE Haptics Symp: 335–34214. Leifer L (1981) Rehabilitation robots. Robotics Age 3(3):4–1515. Li Y, Huegel JC, Patoglu V, O’Malley MK (2009) Progressive shared control for training in virtual environ-
ments. Third Joint Eurohaptics Conf Symp Haptic Interfaces Virtual Environ Teleoperator Syst: 332–33716. Li M, Okamura AM, (2003) Recognition of operator motions for real-time assistance using virtual fixtures.
Proc. 11th Symposium on Haptic Interfaces for Virtual Environments and Tele-operator Systems: 125–13117. Lu K, Liu G, Zhang Y, Guo W, Zhou M (2010) Two-mode system for tank gunnery skill training based on
haptic interaction. IEEE Int Conf Mechatronics Autom: 1449–145318. Marayong P, Okamura AM (2004) Speed-accuracy characteristics of human-machine cooperative manip-
ulation using virtual fixtures with variable admittance. Hum Factors 46(3):518–53219. Méndez E, Yoshida S, Noma H, Yanagida Y, Masaki S, Hosaka K (2005) A haptic-assisted guidance
system for navigating volumetric data sets. Proc First Joint Euro Haptics Conf Symp Haptic InterfacesVirtual Environ Teleoperator Syst: 531–534
20. Moore CA et al (2003) Cobot implementation of virtual paths and 3-D virtual surfaces. IEEE Trans RobotAutom 19(2):347–351
21. O’Malley MK, Gupta A, Gen M, Li Y (2006) Shared control in haptic systems for performanceenhancement and training. J Dyn Syst Meas Control 12:75–85
22. Prada R, Payandeh S (2001) A study on design and analysis of virtual fixtures for cutting in trainingenvironments. Proc First Joint Euro Haptics Conf Symp Haptic Interfaces Virtual Environ TeleoperatorSyst: 1419–1420
23. Rosenberg L (1993) Virtual fixtures: perceptual tools for teler-obotic manipulation. Virtual Real Ann Int’lSymp: 76–82
Multimed Tools Appl
24. Solis J, Avizzano CA, Bergamasco M (2003) Validating a skill transfer system based on reactive robotstechnology. Proc 2003 IEEE Int Workshop Robot Hum Interact Commun: 175–180
25. Srimathveeravalli G, Thenkurussi K, (2005) Motor skill training assistance using haptic attributes. First JointEuro Haptics Conf Symp Haptic Interfaces Virtual Environ Teleoperator Syst: 452–457
26. Yu W, Dubey R, Pernalete N (2004) Telemanipulation enhancement through user’s motion intentionrecognition and fixture assistance. Proc 2004 IEEE Int Robot Sys 3:2235–2240
27. ZhouM, Liu G, Lu K (2012) A novel 2 DOF haptic device for gunnery training. AdvMater Res 346:241–246
Liu Guanyang received the BE degree from Beihang University in 2002, and the PhD degree from BeihangUniversity, Beijing, China in 2008. From 2008 to 2009, he had been a post Doc in Beihang University.Currently he is an Assistant Professor in School of Mechanical Engineering and Automation, BeihangUniversity. He is a member of State Key Lab of Virtual Reality Technology and Systems. His researchinterests include haptic device design, haptic rendering, and medical robotic system.
Yuru Zhang received the BSc degree in mechanical engineering from Dalian University of Science andTechnology, Dalian, China in 1982 and the MS and PhD degrees in mechanical engineering from BeihangUniversity, Beijing, China in 1984 and 1987, respectively. Since 1987, she has been at the Beihang Universitywhere she served as the associate dean of the School of Mechanical Engineering and Automation, theassociate director of Robotics Institute. Currently she is leading the Division of Human–Machine Interactionat the State Key Laboratory of Virtual Reality Technology and System. Her technical interests include haptichuman–machine interface, medical robotic system, robotic dexterous manipulation, and virtual prototyping.
Multimed Tools Appl
Keke Lu Received the master degree in mechanical engineering from Beihang University in 2011. Currentlyhe is an assistant engineer at China Nuclear Power Engineering Co. Ltd. in Beijing. His research interestsinclude tele-haptics and motor skill training.
Liu Lingzhi Received the B.S. degree from Southwest Jiaotong University, Chengdu, in 2009, in mechanicalengineering. She is currently working toward the Ph.D. degree in mechanical engineering at BeihangUniversity, Beijing.
Multimed Tools Appl




![LNCS 7468 - Mobile Haptic Technology Development through ... · [6]. Most haptic interaction systems are based on a desktop paradigm [7]. This also goes for high resolution wearable](https://img.dokumen.tips/doc/110x75/5e762fb7ce91bd1fba5beddf/lncs-7468-mobile-haptic-technology-development-through-6-most-haptic-interaction.jpg)


![Haptic fMRI : Combining Functional Neuroimaging with ... · uses electromagnetic motors to enable high-fidelity haptic rendering ... roimaging technique [1], [2], ... the minimum](https://img.dokumen.tips/doc/110x75/5b396d3e7f8b9a4b0a8cbc7d/haptic-fmri-combining-functional-neuroimaging-with-uses-electromagnetic.jpg)