Embed Size (px)
Citation preview

7. STABILNOST SISTEMA
7.2. STABILNOST LINEARNIH SISTEMA
Dva koncepta stabilnosti linearnih sistema:
1. ulazno-izlazna stabilnost (BIBO stabilnost)
2. asimptotska stabilnost sistema (stabilnost sistema)

7.2.1.1. DEFINICIJA BIBO STABILNOSTI
Definicija 7.4. Linearni stacionarni sistem je BIBO (Boundary Input Boundary Output)
stabilan ako je za bilo koji ograničeni ulazni signal izlaz sistema je takođe ograničen:
( ) ( )t u t t y t
SISTEM

USLOV BIBO STABILNOSTI
0
( ) ( ) ( )y t g u t d
0 0 0
( ) ( ) ( ) ( ) ( ) ( )y t g u t d g u t d g d
Teorema 7.1. Linearni stacionarni sistem, čiji je impulsni odziv ( )g t je BIBO stabilan
ako i samo ako važi:
0
( )g d
Teorema 7.2. Linearni stacionarni sistem, čija je funkcija prenosa G(s), je BIBO stabilan
ako važi Re 0jp , za svaki pol jp funkcije prenosa G(s).

Primer 7.1. Posmatrajmo sistem, čija je funkcija prenosa
1 1
( )1 1 1
sG s
s s s
Iako je sistem sa pozicija ulaz-izlaz BIBO stabilan, on nije stabilan u odnosu na svoju unutrašnju dinamiku.
Kažemo da BIBO stabilnost “ne vodi računa“ o unutrašnjoj dinamici sistema.

7.2.1.2. DEFINICIJA STABILNOSTI LINEARNIH SISTEMA
n m
n 1 0 m 1 0n m
d y(t) dy(t) d u(t) du(t)a ... a a y(t) b ... b b u(t)
dt dt dt dt
( ) ( ) ( )h py t y t y t
Homogeno rešenje - karakter prelaznog procesa
Partikularno - karakteristike ustaljenog stanja.

Definicija 7.5. Linearni stacionarni sistem je
(i) stabilan ako je
lim ( ) 0ht
y t
(ii) nestabilan ako je
lim ( )ht
y t
(iii) aperiodično granično stabilan ako je
lim ( ) , 0ht
y t
(iv) oscilatorno granično stabilan ako
ne postoji lim ( )ht
y t

Definicija 7.7. Linearni stacionarni sistem je
(i) stabilan ako je
lim ( ) 0t
g t
(ii) nestabilan ako je
lim ( )t
g t
(iii) aperiodično granično stabilan ako je
lim ( ) , 0t
g t
(iv) oscilatorno granično stabilan ako
ne postoji lim ( )t
g t

Teorema 7.3.
(i) Kontinualan linearni stacionarni sistem je stabilan ako i samo ako svi njegovi polovi leže u levoj poluravni s-ravni.
(ii) Sistem je na granici stabilnosti ukoliko poseduje jednostruke polove na imaginarnoj osi. Pri tome:
a) par jednostrukih konjugovano kompleksnih polova na imaginarnoj osi vodi ka oscilatornoj granici stabilnosti,
b) jednostruki pol u koordinatnom početku vodi ka aperiodičnoj granici stabilnosti.
(iii) Ukoliko sistem ima bar jedan pol u desnoj poluravni s-ravni, ili ima makar jedan višestruki pol na imaginarnoj osi, za sistem kažemo da je nestabilan.

STABILAN NESTABILAN
GRANIČNO STABILAN ILI NESTABILAN

7.2.2. ALGEBARSKI KRITERIJUMI STABILNOSTI
Karakteristična jednačina sistema:
1
1 1 0( ) 0n n
n nf s a s a s a s a
Potreban uslov da kontinualni linearni stacionarni sistem bude stabilan jeste da svi koeficijenti karakterističnog polinoma budu istog znaka.
Očigledno da je ovo i dovoljan uslov za sisteme prvog i drugog reda.
Potreban i dovoljan uslov da kontinualni linearni stacionarni sistem prvog ili drugog reda bude stabilan jeste da svi koeficijenti karakterističnog polinoma budu istog znaka.
1 0( ) 0f s a s a , 2
2 1 0( ) 0f s a s a s a

7.2.2.1. ROUTH-OV KRITERIJUM STABILNOSTI
1
1 1 0( ) n n
n nf s a s a s a s a
Na osnovu karakterističnog polinoma formira se sledeća tablica brojeva koja se naziva Routh-ovom tabelom:
2 4
1
1 3 5
2
2 4 6
3
3 5
2
2 0
1
1
0
0
n
n n n
n
n n n
n
n n n
n
n n
s a a a
s a a a
s b b b
s c c
s m m
s m
s m
1 1
1
2 1 1
2
,
,
n n i n n in i
n
n n i n n in i
n
a a a ab
a
b a a bc
b

Teorema 7.4. (Routh-ov kriterijum)
1. Potreban i dovoljan uslov da sistem bude stabilan jeste da svi koeficijenti prve Routh-ove kolone budu istog znaka.
2. Sistem je nestabilan ukoliko postoji promena znaka u prvoj Routh-ovoj koloni.
Broj promene znaka u prvoj Routh-ovoj koloni odgovara broju nestabilnih polova sistema.
3. Bilo koja vrsta ili kolona Routh-ove tablice se može pomnožiti pozitivnom konstantom i to neće uticati na rezultat stabilnosti sistema.

Primer 7.3. Proverimo stabilnost sistema čija je karakteristična jednačina 5 4 3 2( ) 2 3 4 5 0f s s s s s s . Formirajmo Routh-ovu tablicu:
5
4
3
2
1
0
1 1 4
2 3 5
1 3
9 5
32
5
s
s
s
s
s
s
U prvoj koloni Routh-ove tablice postoje dve promene znaka i to od 2 na -1 i od -1 na 9.
Karakteristična jednačina ima dva korena sa pozitivnim realnim delovima i sistem je nestabilan.
,
,

Primer 7.4. Za karakterističnu jednačinu ( )f s 4 3 2( ) 2 2 1 0f s s s s s
dobijamo
4
3
2
1
0
1 1 1
2 2
1
2 2 /
1
s
s
s
s
s
Kada 0 , član 0
lim2 2 /
Prema tome, u karakterističnoj jednačini postoje dva korena sa pozitivnim realnim delovima i sistem je nestabilan.
,

Primer 7.5.a Posmatrajmo karakteristični polinom 4 3 2( ) 2 3 4 2f s s s s s
Kad 0 dobija se 0 u redu sa članom 1s .
Tada se formira pomoćni polinom od koeficijenata počevši od reda iznad reda gde se pojavila 0 (ovde je to red sa
članom 2s ).
2 2
1( ) 1 0 2 2f s s s s
Koreni ovog polinoma određuju 2 pola sistema
1,2 2p j j
Ovi polovi utiču na oscilatorni odziv sistema.
Količnik
4 3 22 2
2 2
( ) 2 3 4 22 1 ( 1)
2 2
f s s s s ss s s
s s
daje preostale polove 3,4 1p , koji su stabilni.
Dakle, sistem se nalazi na oscilatornoj granici stabilnosti.
4
3
2
1
0
1 3 2
2 4
2
1 2
s
s
s
s
s

7.2.2.2. HURWITZ-OV KRITERIJUM STABILNOSTI
Polazeći od karakterističnog polinoma
1
1 1 0( ) n n
n nf s a s a s a s a
može se formirati tzv. Hurwitz-ova kvadratna matrica dimenzije n n na sledeći način:
1 3 5 7
2 4 6
1 3 5
2 4
2 0
3 1
4 2 0
0 0 0
0 0 0
0 0 0 0
0 0 0 0
0 0 0 0 0
0
0 0 0 0
n n n n
n n n n
n n n
n n n
a a a a
a a a a
a a a
a a aH
a a
a a
a a a

U cilju ispitivanja stabilnosti sistema potrebno je odrediti sve dijagonalne minore:
1 1
1 3
2
2
1 3 5
3 2 4
1 3
,
,
,
0
n
n n
n n
n n n
n n n
n n
a
a a
a a
a a a
a a a
a a
Pošto su svi elementi poslednje kolone jednaki nuli, osim poslednjeg, važi:
0 1n na

Teorema 7.5. (Hurwitz-ov kriterijum)
1. Potreban i dovoljan uslov da sistem bude stabilan jeste da svi dijagonalni minori budu pozitivni: 1 20, 0, , 0n .
2. Sistem je nestabilan ukoliko je bar jedan dijagonalni minor negativan.
3. Ukoliko važi 1 2 10, 0, , 0n i 0n , sistem se nalazi na aperiodičnoj
granici stabilnosti.
4. Ukoliko je neki od minora 1 2 2, , , n jednak nuli, sistem je nestabilan.

7.2.3. GRAFOANALITIČKI KRITERIJUMI STABILNOSTI
7.2.3.2. NIKVISTOV KRITERIJUM STABILNOSTI SISTEMA
Funkcija povratnog prenosa:
1 2( )
( )( ) ( ) 1
( )
m mmp
On n
P s P sP sG s G s
Q s sf p s p ss p
,
Karakteristični polinom otvorenog sistema
) )( (nOf Qs s , 1 2( ) 0nO s p s p sf ps
Pretpostavka: Postoji P polova u desnoj poluravni (sistem nestabilan).
R(s) Y(s) E(s)
-

Zatvoreni sistem:
( )
( ) ( ) (
( ) (
)( )( )
( )1
)
)
(
( )1
m
n m m
m n
Sm
n
P s
Q s P s P sG sG s
P s P s Q sG
Q s
s f s
Karakteristični polinom zatvorenog sistema
1 2
( ) ( ) ( )( ) 1
( )1
( )
( ( )
(
)
) m m n
n n
m n
n
P s P s Q sF s
Q s Q s
P s Q s
s p s p s p
G s
)(
))
(
(
o
f s
fF s
s , ( ) 0 ( ) ( ) 0( ) m nF s Pf s Q ss

Teorema 7.6. Sistem sa povratnom spregom funkcije povratnog prenosa G(s) je stabilan, ako i samo ako je, pri promeni učestanosti od 0 do , ispunjen jedan od sledeća dva ekvivalentna uslova:
priraštaj argumenta vektora 1 ( )G j je P,
Nikvistova kriva ( )G j obuhvata kritičnu tačku, 1 0j , P/2 puta u pozitivnom
matematičkom smeru.
0
-1
Određivanje broja obuhvata kritične tačke može biti problematičan.
Videti Cipkinovo pravilo prelaza

Slučaj 0P
Teorema 7.7. Neka funkcija povratnog prenosa G(s) sistema nema polova u desnoj poluravni ( 0P ). Sistem sa povratnom spregom je stabilan, ako i samo ako kritična tačka 1 0j leži van Nikvistove krive ( )G j .
0 -1
stabilan
0 -1
nestabilan

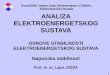
7.2.3.3. CIPKINOVO PRAVILO PRELAZA
Razrešava problem broja obuhvata kritične tačke od strane Nikvistove krive.
Teorema 7.8. Sistem sa povratnom spregom funkcije povratnog prenosa G(s) je stabilan, ako i samo ako je, pri promeni učestanosti od 0 do , razlika pozitivnih i negativnih prelaza, koje Nikvistova kriva čini sa negativnim delom realne ose, levo od kritične tačke 1 0j jednak P/2,
/ 2P gde je P broj polova funkcije G(s) u desnoj poluravni.
-1
1+ 1/2+
1/2+ 1-
1/2-
1/2-
Primer.
0 1 1 02
PSistem nije stabilan
0 -1
1-

GRANIČNA STABILNOST
Ukoliko grafik Nikvistove krive ( )G j prolazi kroz karakterističnu tačku 1 0j
onda važi ( ) 1 ( ) 0f j G j .
Tada se sistem nalazi na oscilatornoj granici stabilnosti.
Ukoliko grafik Nikvistove krive ( )G j polazi iz karakteristične tačke 1 0j onda
važi ( 0) (0) 1 ( 0) 0f j f G j .
Tada se sistem nalazi na aperiodičnoj granici stabilnosti
0 -1
0 -1

Primer 7.6. Nikvistovim kriterijumom ispitati stabilnost sistema čija je funkcija povratnog prenosa
2
1( )
1G s
s s
posle uvođenja jedinične povratne sprege.
Polovi sistema:
1,2 1/ 2 3 / 2s j 0P
Nikvistova kriva (poznata je od ranije)
1
-1
0
-1

Primena Teoreme 7.7 za 0P
Kako Nikvistova kriva ne obuhvata kritičnu tačku 1 0j sledi da je sistem sa
povratnom spregom stabilan.
Primena Teoreme 7.8 za 0P
Pošto Nikvistova kriva ne seče negativni deo imaginarne ose levo od tačke -1, sledi
00 0
2
pa je sistem sa povratnom spregom stabilan.
1
-1
0
-1

NORMALIZACIJA FUNKCIJE POVRATNOG PRENOSA
( ) ( )( ) ( ) ( )
( )
P s G sG s K KG s G s
Q s K , normalizovana Nikvistova kriva
Nikvistova kriva se crta za normalizovanu funkciju i naziva se normalizovana Nikvistova kriva, a početak vektora, čiji argument računamo, je smešten u tački
1/ 0K j .
Apsolutno stabilni sistemi su stabilni za svako K .
Uslovno stabilni sistemi su stabilni za neko K .
0 -

SLUČAJ POLOVA NA IMAGINARNOJ OSI
Primer 7.7. Ispitati stabilnost sistema regulisanja, čija je funkcija povratnog prenosa
( )
1
KG s
s s
( ) 1
( )1 1
K G sG s
s s K s s
Luk AB: js e , 0, 0, / 2
0 0 0
( ) 1 1lim lim lim
1
jj
j j
G ee
K e e
0
0
( )lim ,
( )limarg 0, / 2
j
j
G e
K
G e
K
A
C
D
E
B
F
A’
B’

Duž BC : , 0 ,s j
(i) Tačka u beskonačnosti
2
( ) 1 1lim lim lim
1
G j
K j j j
2
( ) 1lim lim 0,
( )lim arg 2 lim arg 2 / 2
G j
K
G jj
K
(ii) Preseci sa osama
2
2 2
1( ) 1 1
1 1 1
1 1
1 1
j jG j j
K j j j j
j
A
C
D
E
B
F
A’
C’
B’

0 0 0 / 2P , sistem sa povratnom spregom stabilan za svaku vrednost pojačanja K (apsolutno stabilan).
A’
C’
B’
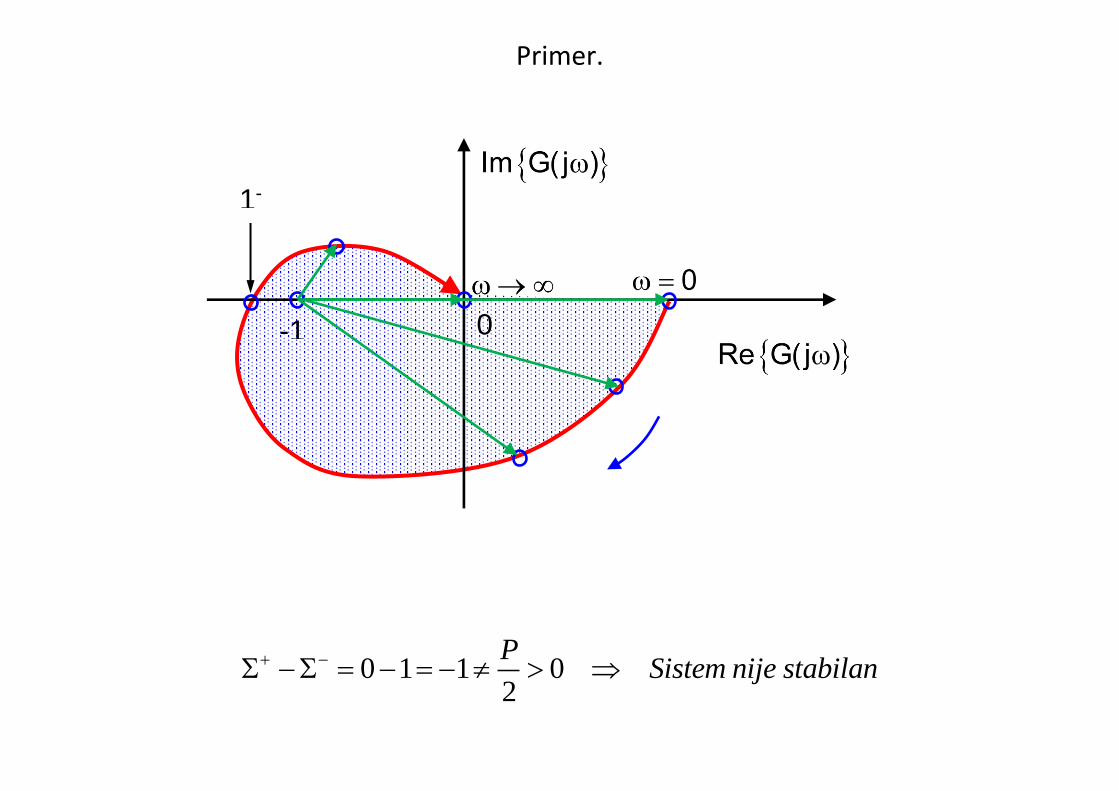
SLUČAJ NEJEDINIČNE POVRATNE SPREGE
Crtamo Nikvistovu krivu za funkcija povratnog prenosa:
1 2( ) ( ) ( )G s G s G s
R(s) Y(s) E(s)
-

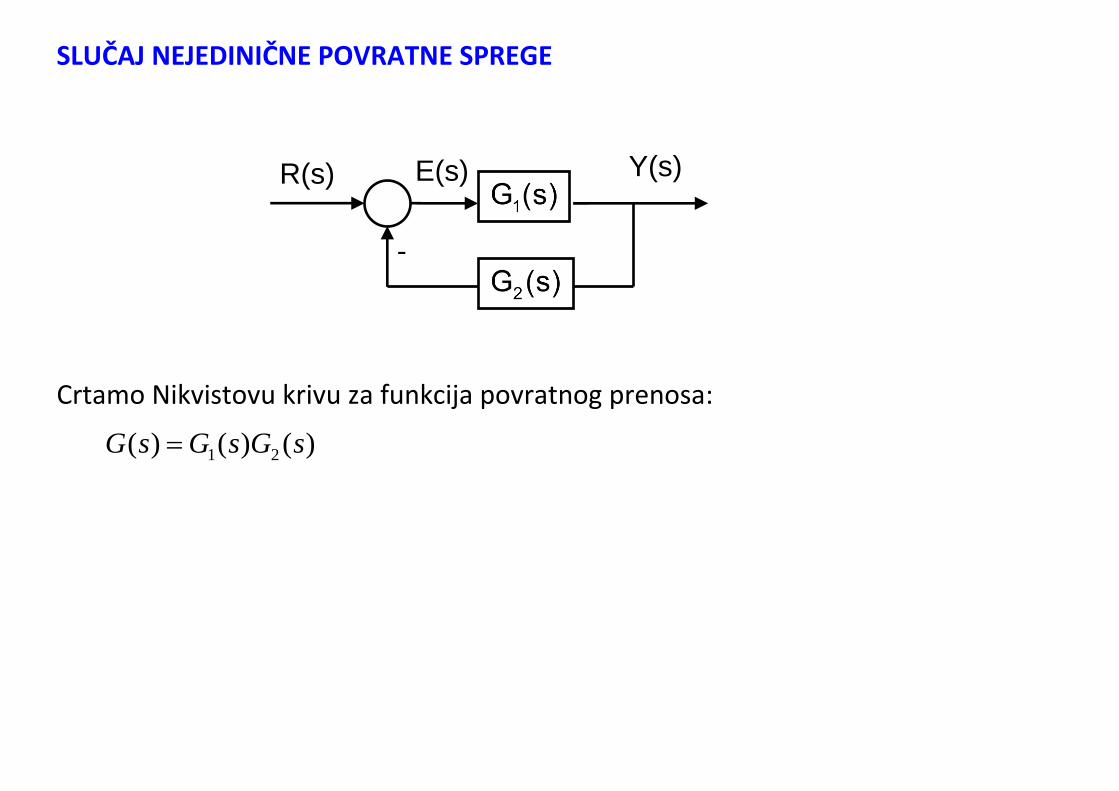
UTICAJ STEPENA ASTATIZMA NA STABILNOST
, 0 1, 0 1r r
G s KP s P sP Q
K Ks Q s s Q s
Pretpostavka: Sistem u otvorenoj sprezi stabilan ( 0P ) .
Apsolutno stabilan
-1/K
Nestabilan
Uslovno stabilan
Uslovno stabilan
Apsolutno stabilan

Nestabilan
Nestabilan
Nestabilan
Uslovno stabilan

7.2.3.2. KRITERIJUM MIHAJLOVA
Karakteristični polinom sistema
1 0( ) n
nf s a s a s a
( ) Re ( ) Im ( ) ( ) ( )f j f j f j U jV
2 4
0 2 4( ) Re ( )U f j a a a
3 5
1 3 5( ) Im ( )V f j a a a
Za 0 , 0(0) , (0) 0U a V ,

Teorema 7.9. Sistem je stabilan ako i samo ako se vektor Mihajlova ( )f j , ne
poprimajući vrednost nula pri promeni učestanosti od 0 do , obrne oko koordinatnog početka za ugao / 2n u pozitivnom smeru, gde je sa n označen red karakterističnog polinoma.

( ) 0kf j sistem se nalazi na oscilatornoj granici stabilnosti.
( ) 0 ( ) 0, ( ) 0k k kf j U V

0( 0) 0f j a sistem se nalazi na aperiodičnoj granici stabilnosti.

7.2.3.5. RELATIVNA STABILNOST ZATVORENIH SISTEMA
Pretek (rezerva) faze
1arg ( )pf G j , 1( ) 1G j
1 - presečna učestanost pojačanja.
0pf sistem stabilan
0pf , sistem nestabilan
0pf sistem je granično stab.
Što je pretek faze veći, sistem će imati veću rezervu (pretek) stabilnosti.
-1+j0
Im ( )G j
pf
1( ) 1G j
1
1
Re ( )G j

Pretek pojačanja
1
( )d
G j
, arg ( )G j
- presečna učestanost faze
1d sistem stabilan
1d sistem nestabilan
1d sistem je granično stabilan
-1+j0
1

Pretek faze i pretek pojačanja na Bode-ovim dijagramima funkcije povratnog prenosa ( )G j .
0
0

7.2.3.6. ISPITIVANJE STABILNOSTI POMOĆU BODEOVIH DIJAGRAMA
1
-1

Teorema 7.10.
1. Ako je funkcija povratnog prenosa G(s) nama polova u desnoj poluravni i ima samo jednu presečnu učestanost faze , sistem sa zatvorenom povratnom
spregom će biti stabilan ako i samo ako je presečna učestanost pojačanja povratnog prenosa 1 manja od presečne učestanosti faze, tj. 1 .
2. Ako je 1 sistem sa povratno spregom je na granici stabilnosti.
3. Ako je 1 sistem sa povratno spregom je nestabilan.
0
0
0
0
0
0
Stabilan Granično stabilan Nestabilan

Teorema 7.11.
1. Ako je funkcija povratnog prenosa G(s) nama polova u desnoj poluravni i ima samo jednu presečnu učestanost faze , sistem sa zatvorenom povratnom
spregom će biti stabilan ako i samo ako je pretek faze pozitivan, tj. 0pf .
2. Ako je 0pf sistem sa povratno spregom je na granici stabilnosti.
3. Ako je 0pf sistem sa povratno spregom je nestabilan.
0
0
0
0
0
0
Stabilan Granično stabilan Nestabilan

Teorema 7.12.
1. Ako je funkcija povratnog prenosa G(s) nama polova u desnoj poluravni i ima samo jednu presečnu učestanost faze , sistem sa zatvorenom povratnom
spregom će biti stabilan ako i samo ako je pretek pojačanja veći od jedan, 1d
2. Ako je 1d sistem sa povratno spregom je na granici stabilnosti.
3. Ako je 1d sistem sa povratno spregom je nestabilan.
0
0
0
0
0
0
Stabilan Granično stabilan Nestabilan