Embed Size (px)
Citation preview
1/33
Nonrigid Registration
2/33
Transformations are more complex
Rigid has only 6 DOF—three shifts and three angles
Important non-rigid transformations
• Similarity: 7 DOF
• Affine: 12 DOF
• Curved: Typically DOF = 100 to 1000.
3/33
Popular Curved Transformations
• Thin-plate splines– Belong to the set of radial-basis functions
• Cubic B-splines– Belong to the set of B-splines
• Both are better than the polynomial transformations– Polynomial requires too many terms to
produce a “well behaved” transformation.
4/33
Form of the Polynomial Transformation
• Two dimensional example:2 2
0,0 1,0 0,1 1,1 2,0 0,2
2 20,0 1,0 0,1 1,1 2,0 0,2
x a a x a y a xy a x a y
y b b x b y b xy b x b y
,
,
I Ji j
i ji j
I Ji j
i ji j
x a x y
y b x y
• which can be written this way:
5/33
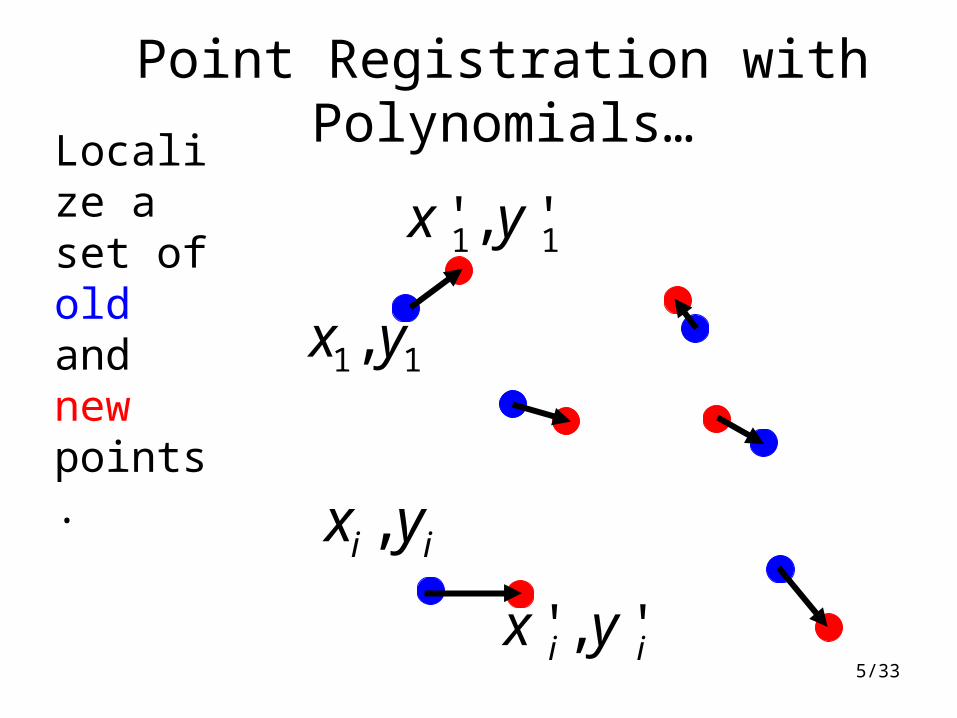
Point Registration with Polynomials…
Localize a set of old and new points.
' , 'i ix y
1 1,x y
,i ix y
1 1' , 'x y
6/33
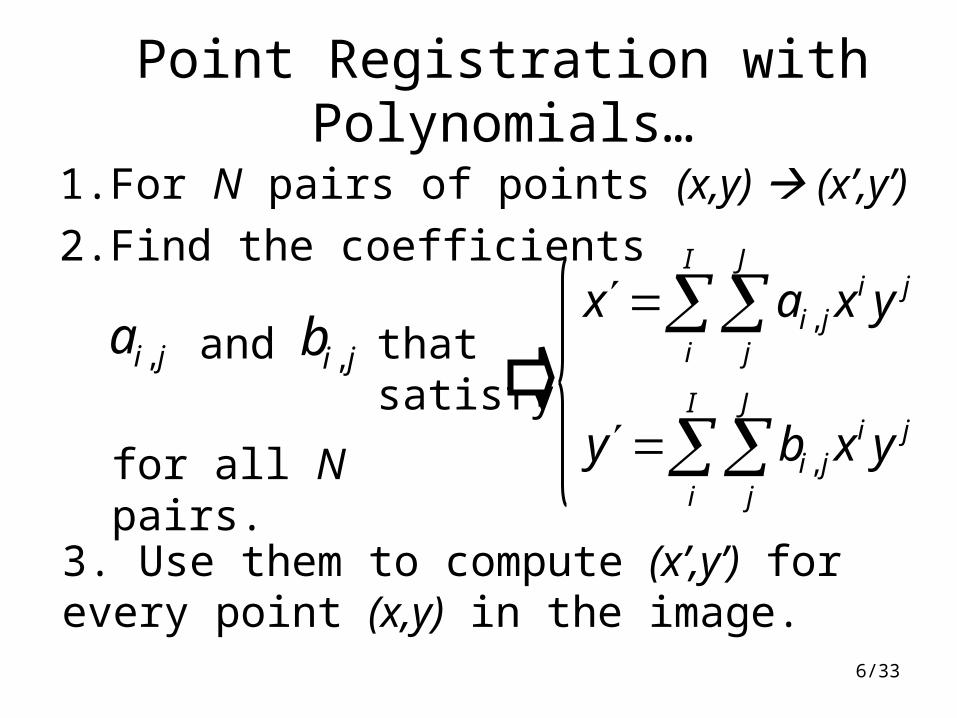
Point Registration with Polynomials…
1. For N pairs of points (x,y) (x’,y’)
2. Find the coefficients
,i ja and ,i jb that satisfy
,
,
I Ji j
i ji j
I Ji j
i ji j
x a x y
y b x y
3. Use them to compute (x’,y’) for every point (x,y) in the image.
for all N pairs.
7/33
Method for Finding Coefficients
• Requires solution of Ax = b– A depends on the initial points– b depends on final points– x contains the coefficients
• See handout – Polynomial Transformation.doc
8/33
Matlab demonstration:
get_test_images
test_warp(im,M,type)
Polynomials behave badly!
9/33
Thin-plate splines behave well
• Suggested for image registration by Ardi Goshtasby in 1988 [IEEE Trans. Geosci. and Remote Sensing, vol 26, no. 1, 1988].
• Based on an analogy to the approximate shape of thin metal plates deflected by normal forces at discrete points
• Uses logs
10/33
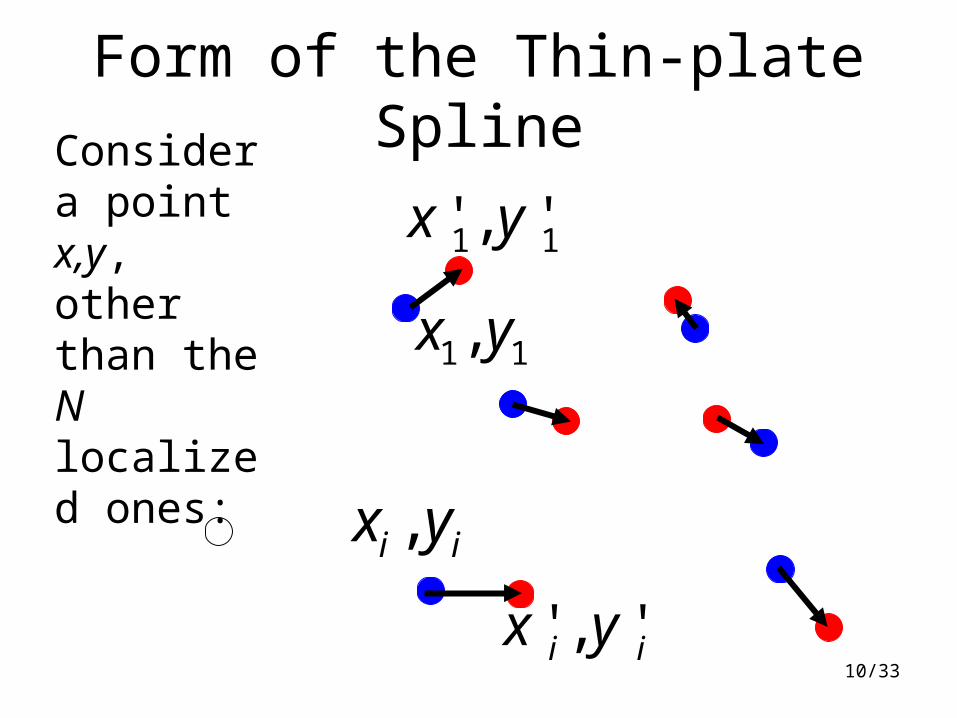
Consider a point x,y, other than the N localized ones:
' , 'i ix y
1 1,x y
,i ix y
1 1' , 'x y
Form of the Thin-plate Spline
11/33
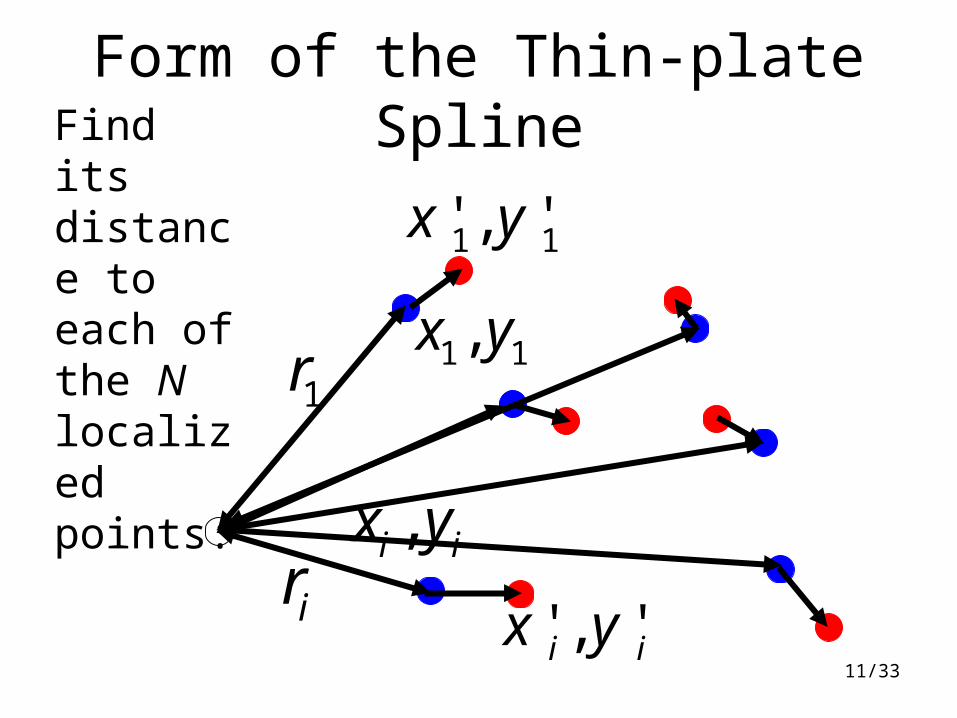
Find its distance to each of the N localized points:
' , 'i ix y
1 1,x y
,i ix y
1 1' , 'x y
Form of the Thin-plate Spline
ir
1r
12/33
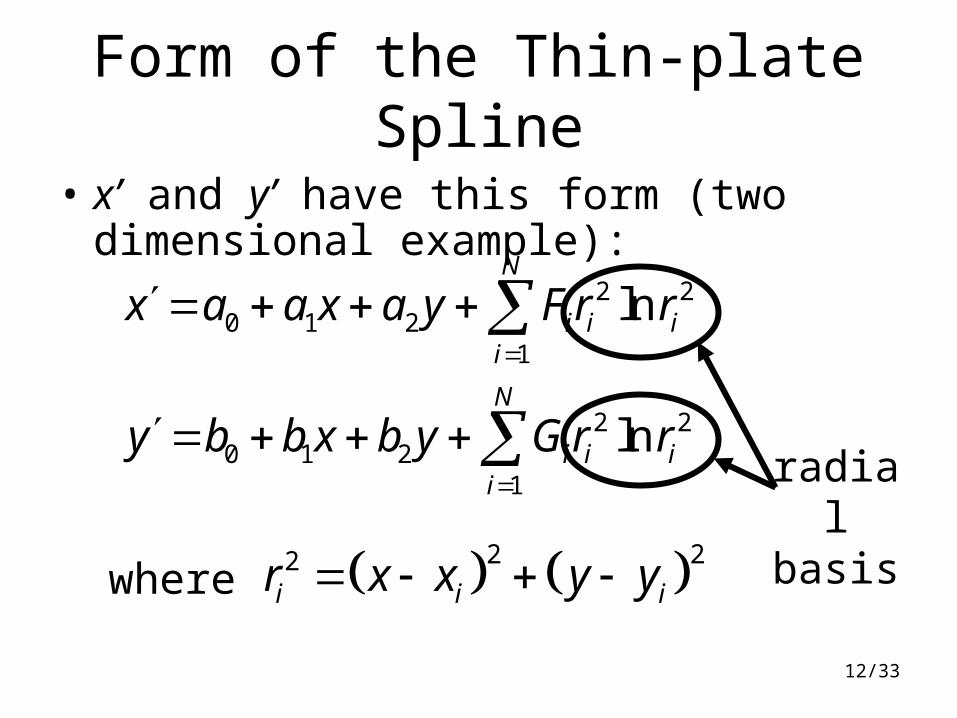
Form of the Thin-plate Spline
• x’ and y’ have this form (two dimensional example):
2 20 1 2
1
2 20 1 2
1
ln
ln
N
i i ii
N
i i ii
x a a x a y F r r
y b b x b y G r r
2 22i i ir x x y y where
radial basis
13/33
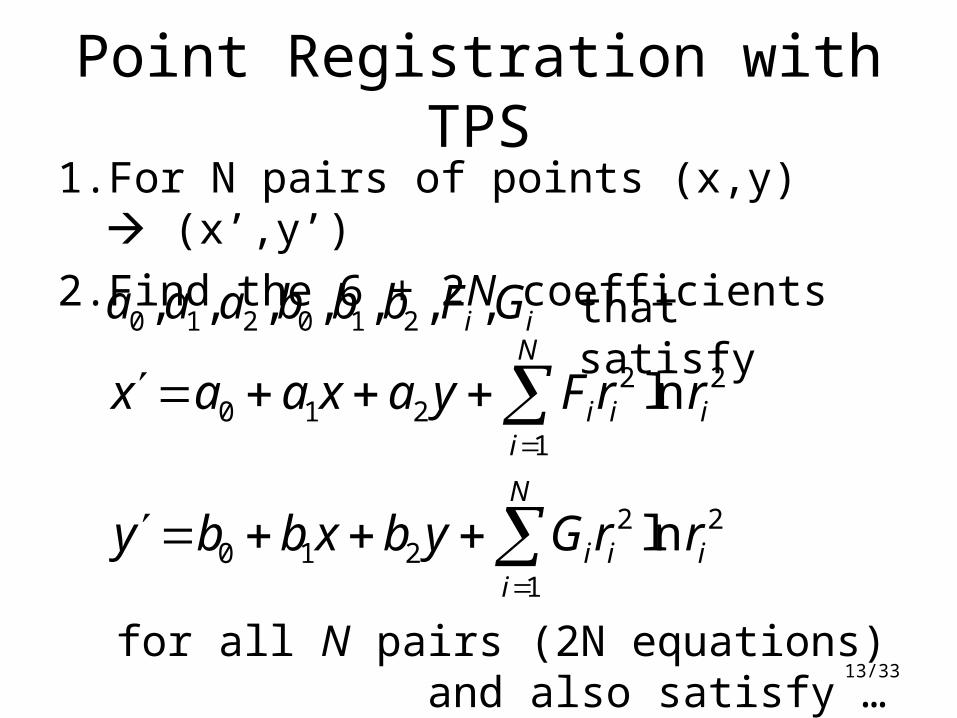
Point Registration with TPS1. For N pairs of points (x,y) (x’,y’)
2. Find the 6 + 2N coefficients
2 20 1 2
1
2 20 1 2
1
ln
ln
N
i i ii
N
i i ii
x a a x a y F r r
y b b x b y G r r
that satisfy0 1 2 0 1 2, , , , , , ,i ia a a b b b F G
for all N pairs (2N equations) and also satisfy …
14/33
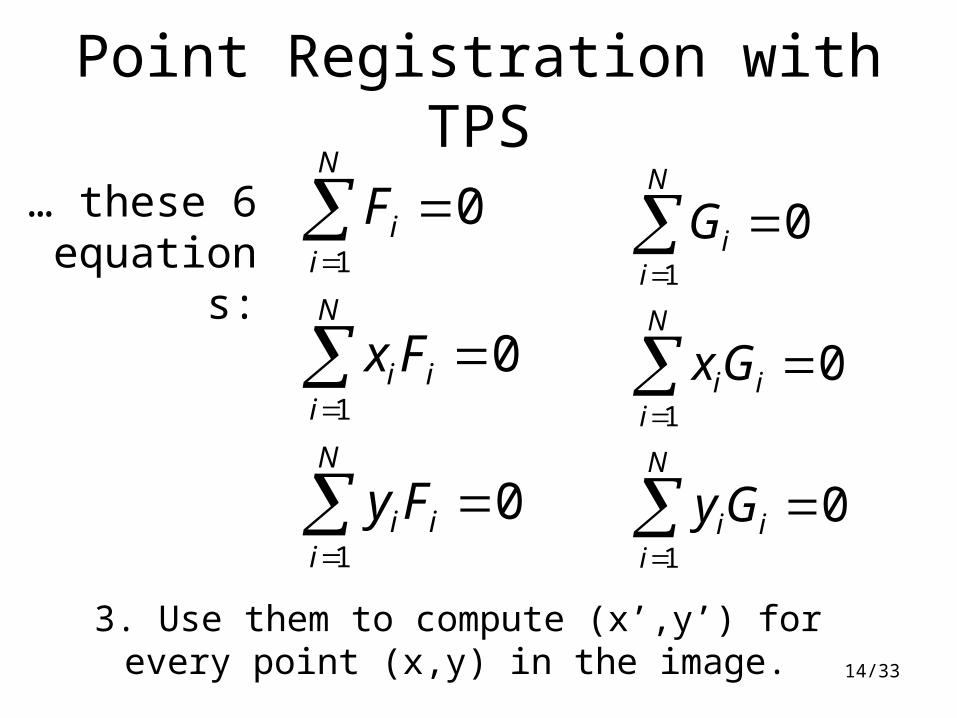
… these 6 equations:
Point Registration with TPS
3. Use them to compute (x’,y’) for every point (x,y) in the image.
1
1
1
0
0
0
N
ii
N
i ii
N
i ii
F
x F
y F
1
1
1
0
0
0
N
ii
N
i ii
N
i ii
G
x G
y G
15/33
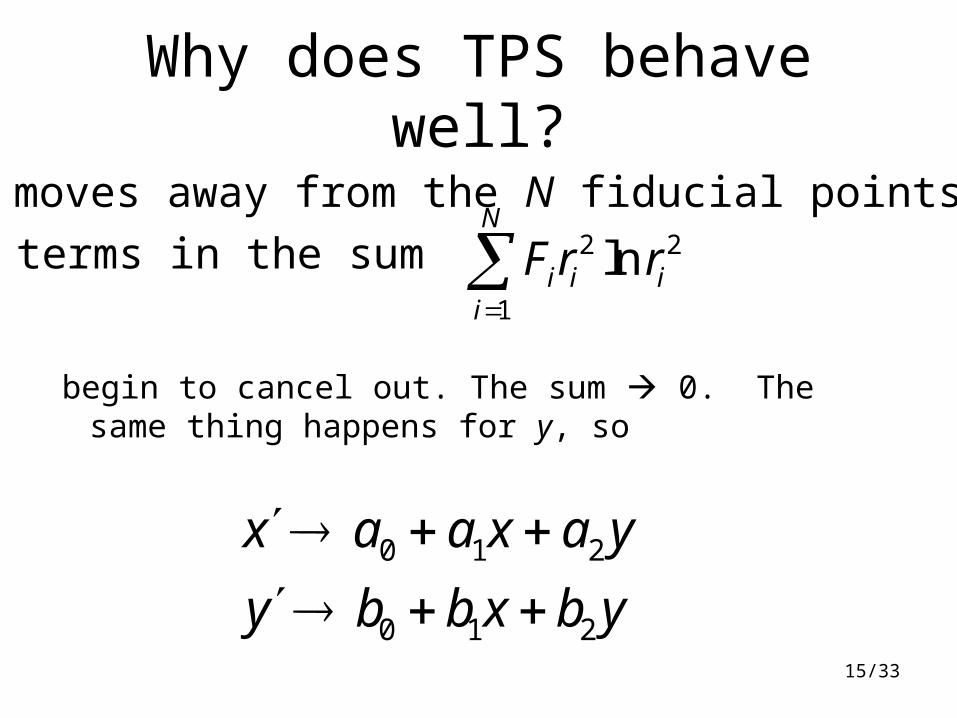
Why does TPS behave well?
2 2
1
lnN
i i ii
F r r
begin to cancel out. The sum 0. The same thing happens for y, so
0 1 2
0 1 2
x a a x a y
y b b x b y
As x moves away from the N fiducial points,
the terms in the sum
16/33
Method for Finding Coefficients
• Requires solution of Ax = b– A depends on the initial points– b depends on final points– x contains the coefficients
• See handout – Thin-Plate Spline Transformation.doc
• Example of use in medical image registration: Meyer, Med. Im. Analy, vol 1, no. 3, pp. 195-206 (1996/7)
(same as for polynomials)
17/33
Cubic B-Splines
• Also determines the motion of all points on the basis of a few “control” points.
• Not suitable for point registration because the control points must lie on a regular grid.
18/33
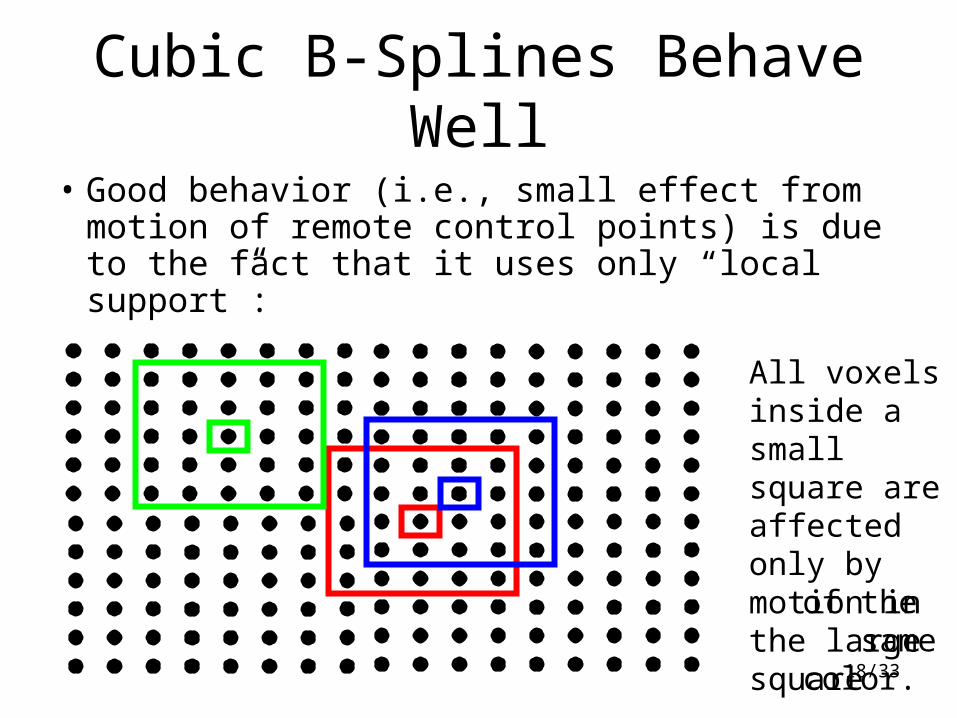
Cubic B-Splines Behave Well
• Good behavior (i.e., small effect from motion of remote control points) is due to the fact that it uses only “local support”:
All voxels inside a small square are affected only by motion in the large squareof the same color.
19/33
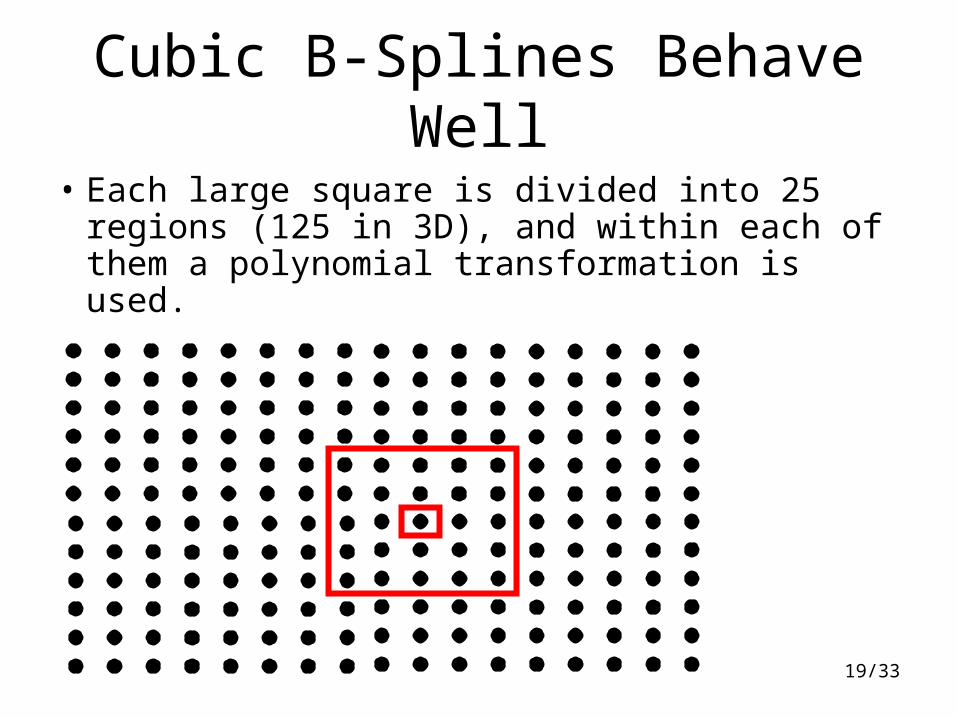
Cubic B-Splines Behave Well
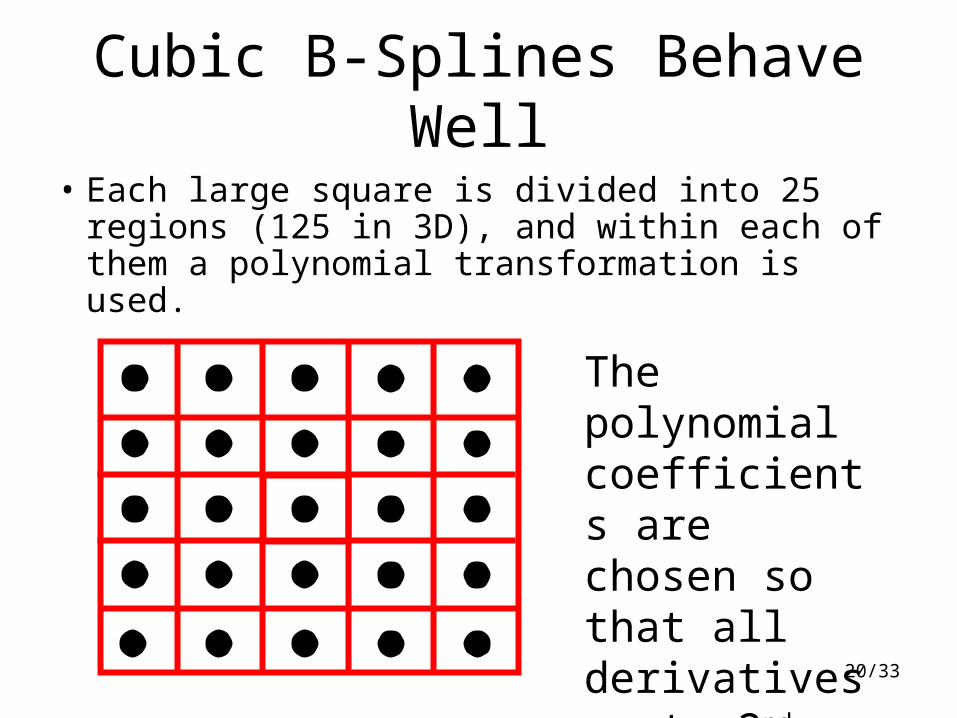
• Each large square is divided into 25 regions (125 in 3D), and within each of them a polynomial transformation is used.
20/33
Cubic B-Splines Behave Well
• Each large square is divided into 25 regions (125 in 3D), and within each of them a polynomial transformation is used.
The polynomial coefficients are chosen so that all derivatives up to 2nd order are continuous.
21/33
Method for Finding Coefficients
• Requires solution of Ax = b– A depends on the initial points– b depends on final points– x contains the coefficients
• See handout – B-Spline Transformation.doc
• Example of use in medical image registration: Rueckert, IEEE TRANS. MED. IMAG., VOL. 18, NO. 8, AUGUST 1999
(same as for polynomials and TPS)
22/33
Continuous Derivatives
• Continuous derivatives reduce “kinks”.
• Both polynomials and thin-place-splines are continuous in all derivatives.
• Cubic B-splines are continuous in all derivatives except 3rd order. – (All derivatives higher than 3rd order are
zero.)
23/33
Nonrigid Intensity Registration
• Let B’(x,y) = B(x’,y’) be a transformed version of image B(x,y).
• Let D(A,B’) be a measure of the dissimilarity of A and B’
– e.g., SAD, or –I(A,B’)
• Search for the transformation,(x’,y’) = T(x,y), that makes D(A,B’) small.
– Loop: Adjust control points, find coefficients, calculate D(A,B(T(x,y))
24/33
Regularization
• It may be desired to limit the variation of the transformation T in some way.– keep some derivatives small– keep the Jacobian close to 1
• Define a variation function, V(T) that is large when the variation in T large
• Search for T that makes C = D(A,B’) + V(T) small.
25/33
Search Techniques
• Grid, steepest descent, Powell’s method, simplex method [Numerical Recipes]
• Stochastic methods (use randomness)– Simulated annealing– Genetic algorithms
• Course-to-fine search– change discretization of coefficients of T– change discretization of images
26/33
End of nonrigid registration and Beginning of Course Review
27/33
Geometrical Transformations
Rigid transformations– All distances remain constant– x’ = Rx + t
• Nonrigid transformations– Distances change but lines remain straight– Curved transformations
• Polynomial• Thin-plate spline• B-spline
28/33
Registration Dichotomy
• Prospective– Something is done to objects before imaging.– Fiducials may be added to objects and point
registration done.
• Retrospective– Nothing is done to objects before imaging.– Anatomical points (rarely reliable)– Surfaces (rarely reliable)– Intensity
29/33
Rigid Point Registration
• Minimize Square of Fiducial Registration Error: 22
1
RE1
FN
i ii
Rx t yN
• Closed-form solution with SVD• Error triad: FLE, FRE, TRE
2 21 2 / N F E FLER2 2 2
2 21 2 32 2 21 2 3
11 / 3
d d d
N f f f
T E FLER
30/33
Intensity Registration
• For intramodality– Sum absolute differences– Sum absolute differences
• If B = aA + c: Correlation coefficient
• For all modalities– Entropy– Mutual Information– Normalized Mutual Information

31/33
All Done!