Embed Size (px)
Citation preview

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
D'après : serveur : http://www.eudil.fr ; Auteur : Belkacem Ould-Bouamama ; Ecole polytechniques de Lille
1 L'Historique, et la régulation automatique aujourd'hui
1.1 AUTOMATISATION :
Ensemble des procédés visant à réduire ou à supprimer l’intervention humaine dans les processus de
production
1.2 LA RÉGULATION AUTOMATIQUE AUJOURD’HUI :
La régulation automatique, actuellement rebaptisée «automatique» est noyée dans les techniques
modernes de commande- robotique, productique etc., en raison surtout de l’apparition de l’électronique, puis
vers les années 60 du microprocesseurs et donc de l’informatique.
Mais il est utile de souligner que les vieilles techniques de régulation classiques restent encore très utilisées
dans l'industrie et elles ont encore de beaux jours devant elles car, la théorie en automatique avance bien
plus vite que l'application et cela, parce que les moyens informatiques sont plus «performants» que la
connaissance du système à traiter c’est à dire le modèle.
Il est aussi intéressant de noter qu’aujourd’hui, les mécaniciens souhaitent parrainer l’automatique car, « la
robotique c’est l’automatique » ,disent-ils, et les informaticiens ont les mêmes ambitions car l’informatique
industrielle est leur apanage. Et l’automatique dans tout ça ? Mais cette question, d’actualité d’ailleurs, est
sans doute la conséquence des transformations des sciences de l’ingénieur subies grâce (ou à cause) de
l’informatique.
1.3 HISTORIQUE :
• 1840 : Régulateur de Watt (Besoins de l’industrie à vapeur)
• 1945 : Deuxième guerre mondiale ( développement de l’automatique dans l’aviation)
• 1960 : Apparition de l’informatique (cosmos, traitement rapide de l’information, possibilité de résolution des
systèmes complexes etc.) Importance : Qualité des produits finis, précision des opérations , protection de
l’environnement, répététivité des opérations etc..
1.4 Pourquoi automatiser :● Augmentation de la fiabilité
● Augmentation de la répétabilité
● Augmentation de la rapidité, des performances en général
● Diminution des coûts
● Garantie de la sécurité de l opérateur
● Souvent, le système est trop rapide pour être géré manuellement
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 1 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
2 Définition 2.1 Systèmes
• ensemble organisé dans un but fixé ou
• ensemble de processus physique-chimiques en évolution et de procédés de réalisations de ces processus.
On distingue :
• Petits systèmes : ils se limitent à un processus type unique (réacteur, vanne, moteur, etc.)
• Grands systèmes : ensemble de petits systèmes (usine chimique, colonne de distillation etc.)
2.2 Signal
Grandeur physique générée par un appareil ou traduite par un capteur (température débit etc.)
Quantité susceptibles de changer de valeur, elle est associée à la grandeur physique qu’elle représente à un instant donné dans un système SI exemple : T1(11) = 100 °C (à t=11 sec., T= 100 °C).
On distingue :
• Signal d’entrée : indépendant du système, il se décompose en commandable et non commandable
(perturbations)
• Signal de sortie : dépendant du système et de signal d’entrée. On distingue sortie observable et non
observable
Exemples : Réacteur chimique, moteur , échangeur de chaleur etc.
3 Systèmes Linéaires:
● Linéarité : principe de superposition
● Additivité : les causes ajoutent leurs effets
si u1(t) -> y1(t) et u2(t) -> y2(t), alors u1(t) + u2(t) -> y1(t) + y2(t)
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 2 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
3 Conception des systèmes de commandes
3.1 Système de commande
Il est composé d’un système de commande et du système à commander
Commander : C’est organiser un système dans un but fixé.
le système à commander est le système sujet à la commande (four, moteur ,réacteur ...)
3.2 Paramètres d’un système de commande
Ordres : Consigne , but fixé : exemple fixer une température à 37 °c ou fixer une trajectoire d’un avion.
Action de commande : Action susceptible de changer l’état du système à commander. Elle est élaborée en
fonction des ordres.
Perturbations : variable aléatoire dont on ne connaît pas l’origine
Sortie : variable à contrôler
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 3 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
4 Système à boucle ouverte (open loop system)
4.1 Définition:
Système à boucle ouverte : système dont on a aucune information sur la grandeur à commander.
Exemple: Le réglage de la température du four est assuré par une personne extérieure (de la salle de contrôle), il n'a
donc aucune information sur la grandeur à régler.
4.2 Avantages et inconvénients :
Système aveugle, pas de correction (insensible aux perturbations) mais rapide et stable.
5 Système à boucle fermée (closed loop system, followed system) 5.1 Principe
A titre d’exemple, le réglage de la température en agissant sur un organe de réglage (la vanne) en fonction de l’écart
entre la valeur désirée et la valeur réelle.
5.2 Avantages et inconvénients : Système précis, il y a une correction (sensible aux perturbations), pas rapide et peut être instable , ne réagit
malheureusement qu’après avoir capté la sortie alors que la perturbation a déjà fait son effet d’où l’idée d’exploiter les
avantages d’un système en boucle ouverte qui permet d’anticiper la perturbation.
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 4 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
6 SYTEMES ASSERVIS ET SYSTEMES DE REGULATION 6.1 Exemple
type d’un système asservi : le comportement humain
Schéma fonctionnel d'un Système de Régulation Automatisée 6.2 Schéma
Mesure
ou erreur
correcteur
erreur
Comparateur
+-
Chaîne directe ou d'action
Régulateur
Actionneur +
Chaîne de retour ou d'observation
Consigne
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 5 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
7 Eléments constitutifs d’une boucle de régulation
7.1 D’une régulation analogique
7.2 D’une régulation numérique
O
u
e
r
r
e
u
r
+-
CNA : convertisseur Numérique Analogique
CAN : convertisseur Analogique Numérique
On peut trouver aussi :
I/P : Convertisseur electro pneumatique
P/I : Convertisseur pneumo électrique
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 6 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
8 Asservissement et régulation :propriétés d’un système contrôlé
8.1 Asservissement
Un système asservi est un SYSTÈME DIT SUIVEUR , c’est la consigne qui varie .
EXEMPLES : une machine outil qui doit usiner une pièce selon un profil donné, un missile qui poursuit une cible .
● Déterniner pour ces deux exemples, la consigne Xc , l'écart ou erreur Xc, la Mesure de la sortie (observation
retournée) Xm , la grandeur de sortie Y .
Xc Xc Xm Y
Machine outil
Missile en
poursuite
8.2 Régulation
Dans ce cas, la consigne est fixée et le système doit compenser l’effet des perturbations.
À TITRE D’EXEMPLE: le réglage de la température dans un four, de la pression dans un réacteur, le niveau d’eau dans un réservoir.
Xc Xc Xm Y
Régulation de T°
Régulation du
niveau d'eau
8.3 Propriétés d’un système contrôlé
Le rôle d’un automaticien est de concevoir un Système de Régulation Automatique qui soit :
• Stable : La grandeur de sortie doit converger vers une valeur finie si le signal d’entrée est aussi
limitée
• Précis : La grandeur à mesurer doit être la plus proche de celle désirée à l’état statique
• Rapide : Il doit répondre rapidement à une excitation.
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 7 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
D'après: Lycée Jacques amyot , Sciences Industrielles et
http://files.iai.heig-vd.ch/Enseignement/Supports%20de%20cours/R%C3%A9gulation%20automatique%20(REG)/Slides/Chapitre%201%20-
%20Introduction%20%C3%A0%20la%20r%C3%A9gulation%20automatique.pdf
Problèmes fondamentaux des systèmes de régulation automatique.
1. Stabilité : régulation manuelle de la température d une douche
● Tr est le retard apporté à la température T(t) compte tenu de la vitesse de l'eau et de la longueur du
tuyau .
● Tc Température de consigne souhaité par la personne , Tm la température mesurée par les capteurs de
la peau du corps .
Schéma Fonctionnel:
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 8 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
2. Stabilité : régulation manuelle de la température d' une douche(suite)
L' opérateur commence sa douche et désire que l eau soit à la température Tc = 1
L' opérateur s' aperçoit que la température Tm = 0 de l'eau est bien inférieure à la valeur souhaitée Tc
L' opérateur ouvre modérément la vanne mélangeuse
L opérateur s aperçoit que l ouverture de la vanne mélangeuse est sans effet notable.
L' opérateur ouvre davantage la vanne mélangeuse
La température T0 de l' eau directement à l' entrée du tuyau est alors à une valeur élevée
L' eau de température élevée parvient à l' opérateur : la température de l' eau Tm dépasse alors largement la consigne
Tc
L' opérateur réagit en tournant la vanne dans l' autre sens
et le pire est à venir . . .
● Cependant, l'opérateur agit dans le bon sens et en modérant son action sur la vanne (oscillation de diminuant), dès qu'il prend en compte correctement le retard Tr apporté aux conséquences de son réglage par
la vitesse limitée de l'eau et la longueur du tuyau .
● Un autre opérateur plus nerveux pourrait provoquer un comportement instable à ce système manuel dont il fait
partie, en tant que régulateur, capteur et actionneur .
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 9 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
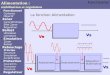
3. Dilemme stabilité précision On donne les courbes de vitesse angulaires du moteur pour des valeurs de gain Kp du correcteur proportionnel de
Kp = 53 , puis 2 puis 0,5 de haut en bas .
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 10 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
Etude en Boucle ouverte
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 11 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
Régulation automatique de vitessehttp://files.iai.heig-vd.ch/Enseignement/Supports%20de%20cours/R%C3%A9gulation%20automatique%20(REG)/Slides/Chapitre%201%20-
%20Introduction%20%C3%A0%20la%20r%C3%A9gulation%20automatique.pdf
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 12 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
Régulation automatique de vitesse Régulateur tout-ou-rien pas approprié --> Régulateur P
u(t) = Kp · e(t) ; courbes M , M = ; ( ) 1 u t commande
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 13 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
10.Exemple d'asservissement (poursuite d'une cible)
RADAR
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 14 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
11.Exemple de régulation : REGULATION DE LA TEMPERATURE D'UN FOUR
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 15 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
SYSTÈMES LINÉAIRES ET FONCTIONS DE TRANSFERT :
1.1 Notion de système physique :
1.2 systèmes linéaires :
● Définition :
Un système physique est dit linéaire si les différentes grandeurs de sortie sont liées aux entrées par des
équations différentielles linéaires à coefficients constants.
Propriété :
- si on change e(t) en k e(t), s(t) devient k s(t)
- si à e1(t) correspond s1(t) et à e2(t) correspond s2(t),
alors à k1e1(t)+k2e2(t) correspond k1s1(t) + k2s2(t).
Ces remarques relativement triviales jouent cependant un rôle important lorsqu'on veut connaître la réponse
d'un système à une entrée non simple (créneaux, dents de scie etc...)
● un système réel pourra être modélisé par un système linéaire s'il a approximativement les propriétés
ci-dessus .
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 16 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
Exemple de système linéaire : cas d'un système
monovariable, le circuit RC .
Le flèches indiquent l'irréversibilité de la relation
entrée/sortie .
Dans le cas général un système monovariable n'existe pas,
toutefois les autres grandeurs qui ont une influence sur s(t)
sont appelées entrées parasites ou perturbations .
e(t) = ; s(t ) =
● De même pour le système du premier ordre RL :
e(t) = ; s(t ) =
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 17 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
1.3 NOTION DE FONCTION DE TRANSFERT OU TRANSMITTANCE
e(t) ENTRÉE et s(t) SORTIE .
Avec E(p) = ℒ [e(t)] et S(p) = ℒ [s(t)] ; les transformations de Laplace de e(t) et s(t)
● La transformée de Laplace permet de faire intervenir les conditions initiales e(t=0) et s(t=0) par
l'intermédiaire du théorème de la dérivation
Si les conditions initiales sont nulles (conditions de Heaviside) on peut exprimer la Fonction de transfert: T(p)
● Exemple pour un système linéaire du premier ordre régi par l'équation : . ds(t) / dt + s(t) = a. e(t)
. p.S(p) + S(p) = a. E(p) ; avec e(0) = 0 et s(0) = 0
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 18 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
● Fonction de transfert d'un système bouclé :
err(t) = e(t) – r(t) ; Err(p) = E(p) – R(p) .
Montrer que T p= Sp E p
= Hp1K p . Hp
T(p) est appelé Fonction de Transfert en Boucle Fermé.
La F.T.B.F.
Monter que la FTBF du Système à retour unitaire, est :
T p= Sp E p
= H p1H p
On ne traitera pas ici des systèmes perturbés,
présentant une autre entrée que E(p), E1(p) non
maitrisée par l'utilisateur . Par exemple une
perturbation de couple par coincement au niveau de
l'axe de rotation de l'axe d'un moteur .
SYSTÈME À RETOUR UNITAIRE.
SYSTÈME BOUCLÉ PERTURBÉ
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 19 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
Modélisation des systèmes linéaires :
(prérequis: La connaissance des lois de l'électricité, des composants de base , de La Transformée de Laplace . )
1.1 On cherche un modèle ( système calculable mathématiquement) dont le comportement se
rapproche le plus du système réel :
Exemple : Circuit RC ,
On utilise les lois des branches, des noeuds et d'ohms pour établir l'équation liant l'entrée et la sortie :
Mise en équation dans le domaine temporel :
. dvc t dt
vc t =u t avec=R.C, la constante de temps du circuit .
On verra qu'il y a souvent intérêt à passer dans le domaine fréquentiel ou symbolique (variable p) par la Transformation
de Laplace .
Les modèles les plus utilisés sont les modèles des premiers et second ordre .
a) Modèle du premier ordre :
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 20 / 21

SYSTÈMES LINÉAIRES ASSERVIS (MODULE 6 - BTSCIM)
RÉGULATION - AUTOMATIQUE. Eclipse à Chéraute
Liens pour l'automatique :
1. Cours et QCM :http://perso.menara.ma/~bennisnajib/
2. Cours : http://stielec.ac-aix-marseille.fr/
Physique Appliquée-Lycée du Pays de soule 24/01/07-CoursSystAsservis.odt-Djl-Page: 21 / 21