Embed Size (px)
Citation preview

1 Fazni portret dvodimenzionalnog linearnog dinamiqkog sistema sa
konstantnim koeficijentima
profesor: Marija Miki�
Posmatrajmo homogen linearan dinamiqki sistem sa konstantnim koeficijentima oblika
x′1(t) = a11x1 + a12x2
x′2(t) = a21x1 + a22x2,
tj. sistem oblika
(1) X ′(t) = A ·X,
gde je A = [aij ]2i,j=1, aij ∈ R, i, j ∈ {1, 2}. Neka su λ1 i λ2 sopstvene vrednosti matrice A, a γ1 i γ2 odgovaraju�i
linearno nezavisni sopstveni (uopxteni) vektori kada su sopstvene vrednosti realne, odnosno realni i imaginarnidelovi sopstvenog vektora kada su sopstvene vrednosti kompleksne. Neka je matrica T matrica transformacijeoblika T = [γ1, γ2]. Tada je matrica J = T−1AT matrica koja ima jedan od slede�a qetiri oblika
J1 =
[λ1 00 λ2
], J2 =
[α β−β α
], J3 =
[λ1 00 λ1
], J4 =
[λ1 10 λ1
].
U �ei da skiciramo fazni portret dinamiqkog sistema (1) posmatra�emo �egov kanonski oblik (kada matricu Asvedemo na �ordanovu normalnu formu) tj. dinamiqki sistem oblika
(2) X ′(t) = J ·X.
Razlikova�emo sluqajeve u zavisnosti od sopstvenih vrednosti matrice A.
1) Sopstvene vrednosti matrice A su realne i razliqite.
U ovom sluqaju matrica sistema (2) je oblika
J =
[λ1 00 λ2
].
Odgovaraju�i sopstveni vektori su γ1 =
[10
]i γ2 =
[01
]. Stoga je opxte rexe�e dinamiqkog sistema (2)
X(t) = c1eλ1t
[10
]+ c2e
λ2t
[01
], c1, c2 ∈ R.
Oznaqimo sa X1(t) = eλ1t
[10
]i X2 = eλ2t
[01
].
1.1) Neka je λ1 < λ2 < 0. Kako nacrtati fazni portret dinamiqkog sistema (2) u ovom sluqaju?
Primetimo da je jedini ekvilibrijum ovog dinamiqkog sistema X∗ = (0,0). Kako je ekvilibrijum projekcija tri-vijalnog rexe�a na faznu ravan, to je ekvilibrijum sistema jedna �egova trajektorija. Primetimo da u preostalimsluqajevima
x1(t)→ 0 i x2(t)→ 0 kada t→∞,
x1(t)→∞ i x2(t)→∞ kada t→ −∞,
tj. smer faznih trajektorija je odre�en sopstvenim vrednostima matrice (a pravac faznih trajektorija je odre�ensopstvenim vektorima).

Lako mo�emo odrediti jox qetiri fazne trajektori posmatranog dinamiqkog sistema. Ako je:
1) c1 = 1 i c2 = 0, rexe�e sistema je x1(t) = eλ1t, x2(t) = 0. Fazna trajektorija je poluprava x2(x1) = 0, x1 > 0.
2) c1 = −1 i c2 = 0, rexe�e sistema je x1(t) = −eλ1t, x2(t) = 0. Fazna trajektorija je poluprava x2(x1) = 0, x1 < 0.
3) c1 = 0 i c2 = 1, rexe�e sistema je x1(t) = 0, x2(t) = eλ2t. Fazna trajektorija je poluprava x1 = 0, x2 > 0.
4) c1 = 0 i c2 = −1, rexe�e sistema je x1(t) = 0, x2(t) = −eλ2t. Fazna trajektorija je poluprava x1 = 0, x2 < 0.
�elimo da odredimo i ostale fazne trajektorije. Posmatrajmo sluqaj kada su na primer c1, c2 > 0 (u preostalimsluqajevima ide analogno zbog simetrije). Kako je x1(t) = c1e
λ1t, a x2(t) = c2eλ2t, to je
x2 = c2eλ2t = c2
(eλ1t
)λ2λ1 = c2 ·
(x1c1
)λ2λ1
= c · xλ2λ11 , gde je c > 0.
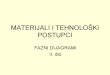
Na slikama ispod prikazana je jedna fazna trajektorija (kada je c = 1) u sluqaju kada je λ2
λ1= 1
2 i fazni portretdinamiqkog sistema u tom sluqaju. Ekvilibrijum se u ovom sluqaju naziva stabilan qvor.
Primetimo da kada t→∞, kako je λ1 < λ2 < 0, eλ2t opada sporije nego eλ1t, pa je dominantan vektorX2(t). Primetimoda kada t→ −∞, kako je λ1 < λ2 < 0, eλ1t raste br�e nego eλ2t, pa je dominantan vektor X1(t).
�elimo da vidimo kako �e izgledati fazni portret u sluqaju kada imamo sistem (1). To �emo objasniti naprimeru.
Primer 1. Skicirati fazni portret dinamiqkog sistema
x′1 = −x1 + 2x2
x′2 = −3x2.
Sopstvene vrednosti matrice sistema A su λ1 = −3 i λ2 = −1. Stoga se matrica A mo�e svesti na matricu
J =
[−3 00 −1
].
Sopstveni vektor koji odgovara sopstvenoj vrednosti λ1 = −3 je γ1 =
[1−1
], a sopstveni vektor koji odgovara sop-
stvenoj vrednosti λ2 = −1 je γ2 =
[10
]. Stoga je opxte rexe�e dinamiqkog sistema (2)
X(t) = c1e−3t
[1−1
]+ c2e
−t[10
], c1, c2 ∈ R.
Jedini ekvilibrijum ovog dinamiqkog sistema jeste X∗ = (0,0). Kako je on projekcija integralne krive trivijalnogrexe�a na faznu ravan, to je taqka ekvilibrijuma jedna fazna trajektorija. Lako mo�emo odrediti jox qetirifazne trajektori posmatranog dinamiqkog sistema.

Ako je:
1) (c1, c2) = (1, 0), rexe�e je x1(t) = e−3t, x2(t) = −e−3t. Fazna trajektorija je poluprava x2(x1) = −x1, x1 > 0.
2) (c1, c2) = (−1, 0), rexe�e je x1(t) = −e−3t, x2(t) = e−3t. Fazna trajektorija je poluprava x2(x1) = −x1, x1 < 0.
3) (c1, c2) = (0, 1), rexe�e je x1(t) = e−t, x2(t) = 0. Fazna trajektorija je poluprava x2(x1) = 0, x1 > 0.
3) (c1, c2) = (0,−1), rexe�e je x1(t) = −e−t, x2(t) = 0. Fazna trajektorija je poluprava x2(x1) = 0, x1 < 0.
Primetimo da kada t→∞, eλ2t opada sporije nego eλ1t, pa je dominantan vektor X2(t). Primetimo da kada t→ −∞,eλ1t raste br�e nego eλ2t, pa je dominantan vektor X1(t). Ekvilibrijum i u ovom sluqaju je stabilan qvor. Fazniportret dinamiqkog sistema (1) je prikazan na slici levo, a dinamiqkog sistema (2) na slici desno.
Primetimo da fazni portreti dinamiqkih sistema (1) i (2) nisu identiqni, ali se tip polo�aja ravnote�e neme�a i oquvana je orijentacija trajektorija.
1.2) Neka je 0 < λ2 < λ1. Primetimo da je jedini ekvilibrijum i ovog dinamiqkog sistema X∗ = (0,0). Primetimoda u preostalim sluqajevima
x1(t)→ 0 i x2(t)→ 0 kada t→ −∞,
x1(t)→∞ i x2(t)→∞ kada t→∞,
tj. smer kreta�a faznih trajektorija je odre�en sopstvenim vrednostima matrice (a pravac kreta�a faznih trajek-torija je odre�en sopstvenim vektorima). Skicira�e faznog portreta u ovom sluqaju je analogno kao u prethodnom,samo je smer trajektorija suprotan. Fazni portret dinamiqkog sistema prikazan je na slici ispod.
Ekvilibrijum se u ovom sluqaju naziva se nestabilan qvor.
1.3) Neka je λ1 < 0 < λ2. Primetimo da je jedini ekvilibrijum ovog dinamiqkog sistema X∗ = (0,0). Primetimoda u preostalim sluqajevima
x1(t)→ 0 i x2(t)→∞ kada t→∞,
x1(t)→∞ i x2(t)→ 0 kada t→ −∞.

Fazne trajektorije koje dobijamo u sluqajevima kada su (c1, c2) = (1, 0), (c1, c2) = (−1, 0), (c1, c2) = (0, 1) i (c1, c2) =(0,−1) su iste kao u prethodna dva sluqaja (samo treba voditi raquna o smeru tajektorija).
�elimo da odredimo i ostale fazne trajektorije. Posmatrajmo sluqaj kada su na primer c1, c2 > 0 (u preostalimsluqajevima ide analogno zbog simetrije). Kako je x1(t) = c1e
λ1t, a x2(t) = c2eλ2t, to je
x2 = c2(eλ1t
)λ2λ1 = c2 ·
(x1c1
)λ2λ1
= c · xλ2λ11 , gde je c > 0.
Primetimo da je sada λ2
λ1< 0, stoga fazne trajektorije izgledaju drugaqije nego u prethodna dva sluqaja. Na
slikama ispod prikazana je jedna fazna trajektorija (kada je c = 1) u sluqaju kada je λ2
λ1= −1 i fazni portret
dinamiqkog sistema u tom sluqaju. Ekvilibrijum se u ovom sluqaju naziva sedlo.
Primetimo da kada t→∞, kako va�i da je λ1 < λ2, vektor X2(t) je dominantan vektor. Primetimo da kada t→ −∞,kako va�i da je λ1 < λ2, vektor X1(t) je dominantan vektor.
1.4) Neka je λ1 = 0 i λ2 6= 0. Tada je matrica sistema (2)
J =
[0 00 λ2
].
Odgovaraju�i sopstveni vektori su γ1 =
[10
]i γ2 =
[01
]. Stoga je opxte rexe�e dinamiqkog sistema (2)
X(t) = c1
[10
]+ c2e
λ2t
[01
], c1, c2 ∈ R.
Primetimo da u ovom sluqaju imamo beskonaqno mnogo ekvilibrijuma i oni su oblika X∗ = (s,0), s ∈ R, tj. svakataqka x1-ose je ekvilibrijum. Kako je x1(t) = c1, a x2(t) = c2e
λ2t, to je su fazne trajektorije poluprave x1 = c1, x2 > 0,za svako fiksirano c1 ∈ R i x1 = c1, x2 < 0, za svako fiksirano c1 ∈ R. Smer faznih trajektorija zavisi od znakasopstvene vrednosti λ2. Na slici levo prikazan je fazni portret dinamiqkog sistema kada je λ2 > 0, a na slicidesno kada je λ2 < 0. Ekvilibrijumi u ovom sluqaju su neizolovani qvorovi.

2) Sopstvene vrednosti matrice A su konjugovano kompleksne.
U ovom sluqaju matrica sistema (2) je oblika
J =
[α β−β α
],
gde su α, β ∈ R, β 6= 0. Sopstveni vektor koji odgovara sopstvenoj vrednosti λ1 = α + iβ je γ1 =
[1i
]. Stoga je
kompleksno rexe�e dinamiqkog sistema (2)
Xk(t) = e(α+iβ)t[1i
]= eαt
[cos(βt)− sin(βt)
]+ ieαt
[sin(βt)cos(βt)
].
Kako su realni i imaginarni deo ovog kompleksnog rexe�a linearno nezavisna rexe�a sistema to je opxte rexe�esistema
X(t) = c1eαt
[cos(βt)− sin(βt)
]+ c2e
αt
[sin(βt)cos(βt)
], c1, c2 ∈ R.
Primetimo da jex21(t) + x22(t) = e2αt(c21 + c22),
za svako t ∈ R. U zavisnosti od vrednosti realnog parametra α razlikova�emo sluqajeve.
2.1) Neka je α = 0. Kako nacrtati fazni portret dinamiqkog sistema (2) u ovom sluqaju?
Primetimo da je jedini ekvilibrijum ovog dinamiqkog sistema X∗ = (0,0). U ovom sluqaju prethodni identitetje oblika
x21 + x22 = c21 + c22,
tj. fazne trajektorije su kru�nice. Ekvilibrijum u ovom sluqaju jeste centar. Ostaje jox da odredimo smer faznihtrajektorija. Da bi odredili smer dovono je da odredimo vektor pravca u jednoj taqki. Tako se dobija da u sluqajukada je β > 0 smer fazne trajektorije je isti kao smer kazaki na satu, a u sluqaju β < 0 suprotan. Fazni portretdinamiqkog sistema (2) u sluqaju kada je β > 0 prikazan je na slici levo, a u sluqaju kada je β < 0 na slici desno.
Primer 2. Skicirati fazni portret dinamiqkog sistema
x′1 = x1 + 2x2
x′2 = x1 − x2.

Sopstvene vrednosti matrice sistema A su λ1,2 = ±i. Stoga se matrica A mo�e svesti na matricu
J =
[0 1−1 0
].
Sopstveni vektor koji odgovara sopstvenoj vrednosti λ1 = i jeste vektor γ1 =
[1 + i−1
]. Tada je matrica transformacije
T =
[1 1−1 0
]. Stoga je opxte rexe�e dinamiqkog sistema (1) oblika X(t) = TexJC1, gde je C1 =
[c1c2
], gde su c1, c2 ∈ R.
Fazne trajektorije u dinamiqkog sistema X ′ = AX su elipse i prikazane su na slici levo, dok u sluqaju dinamiqkogsistema X ′ = JX su kru�nice i prikazane su na slici desno.
Primetimo da fazni portreti dinamiqkih sistema (1) i (2) nisu identiqni, ali se tip polo�aja ravnote�e neme�a i oquvana je orijentacija trajektorija.
2.2) Neka je α 6= 0. Primetimo da je i u ovom sluqaju jedini ekvilibrijum X∗ = (0,0).
Posmatrajmo jednakostx21(t) + x22(t) = e2αt(c21 + c22), t ∈ R.
Primetimo da qlan eαt transformixe kru�nice u spirale koje se kre�u ka koordinatnom poqetku ili se udaavajuod �ega. Ako je α > 0 fazne trajektorije se udaavaju od koordinatnog poqetka i ekvilibrijum se tada nazivanestabilan fokus, a ako je α < 0 fazne trajektorije se pribli�avaju koordinatnom poqetku i ekvilibrijum setada naziva stabilan fokus. Fazni portret dinamiqkog sistema (2) u sluqaju kada je α > 0 prikazan je na slicilevo, a kada je α < 0 na slici desno.