Embed Size (px)
Citation preview
1 Análisis de la Respuesta Temporal
El estudio de la respuesta temporal de un sistema es de vital importancia para el posterior análisis de su com-
portamiento y el posible diseño de un sistema de control. En este capítulo se realizará el estudio detallado de la
respuesta temporal de un sistema, el cual se fundamentará en el conocimiento previo que se tiene del mismo, o
lo que es lo mismo en el modelo del sistema.
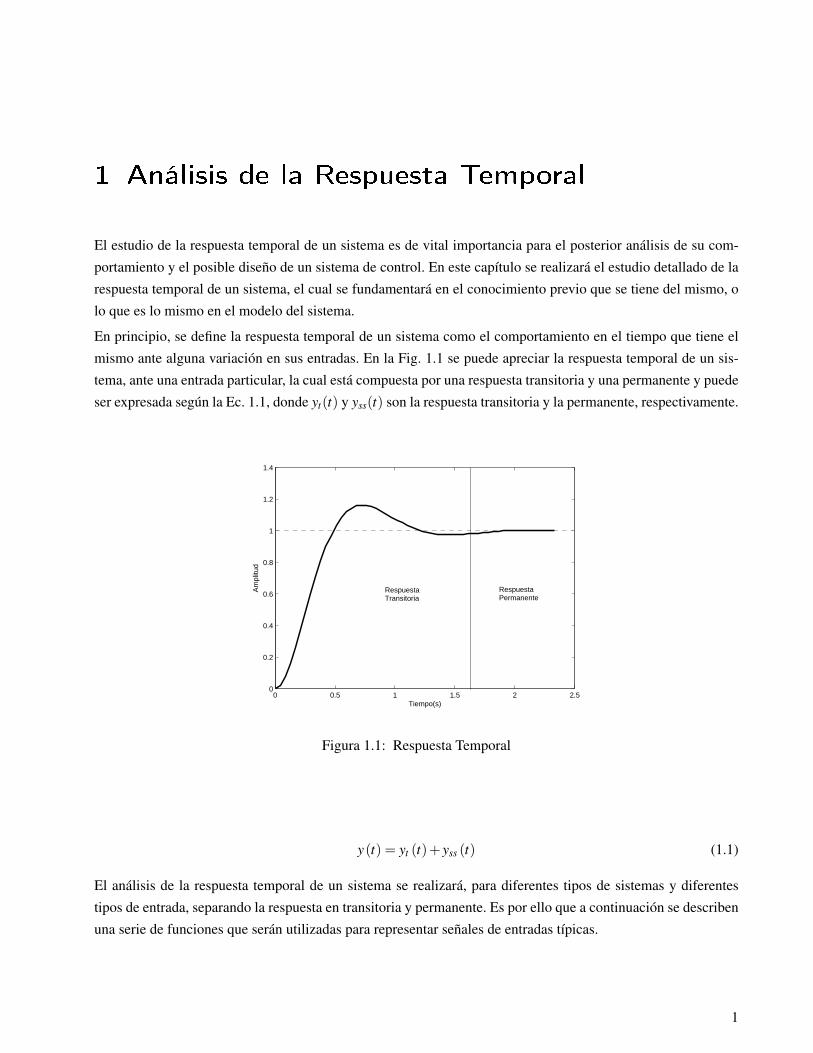
En principio, se define la respuesta temporal de un sistema como el comportamiento en el tiempo que tiene el
mismo ante alguna variación en sus entradas. En la Fig. 1.1 se puede apreciar la respuesta temporal de un sis-
tema, ante una entrada particular, la cual está compuesta por una respuesta transitoria y una permanente y puede
ser expresada según la Ec. 1.1, donde yt(t) y yss(t) son la respuesta transitoria y la permanente, respectivamente.
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo(s)
Am
plitu
d
RespuestaTransitoria
RespuestaPermanente
Figura 1.1: Respuesta Temporal
y(t) = yt (t)+ yss (t) (1.1)
El análisis de la respuesta temporal de un sistema se realizará, para diferentes tipos de sistemas y diferentes
tipos de entrada, separando la respuesta en transitoria y permanente. Es por ello que a continuación se describen
una serie de funciones que serán utilizadas para representar señales de entradas típicas.
1
1 Análisis de la Respuesta Temporal
1.1. Señales de Entradas
En el análisis de un sistema de control es necesario conocer su comportamiento ante diferentes tipos de entradas
o perturbaciones, por lo que se estudiarán, en esta sección, una serie de señales que comúnmente ocurren en la
vida real, tales como el impulso, el escalón, la rampa y la parábola.
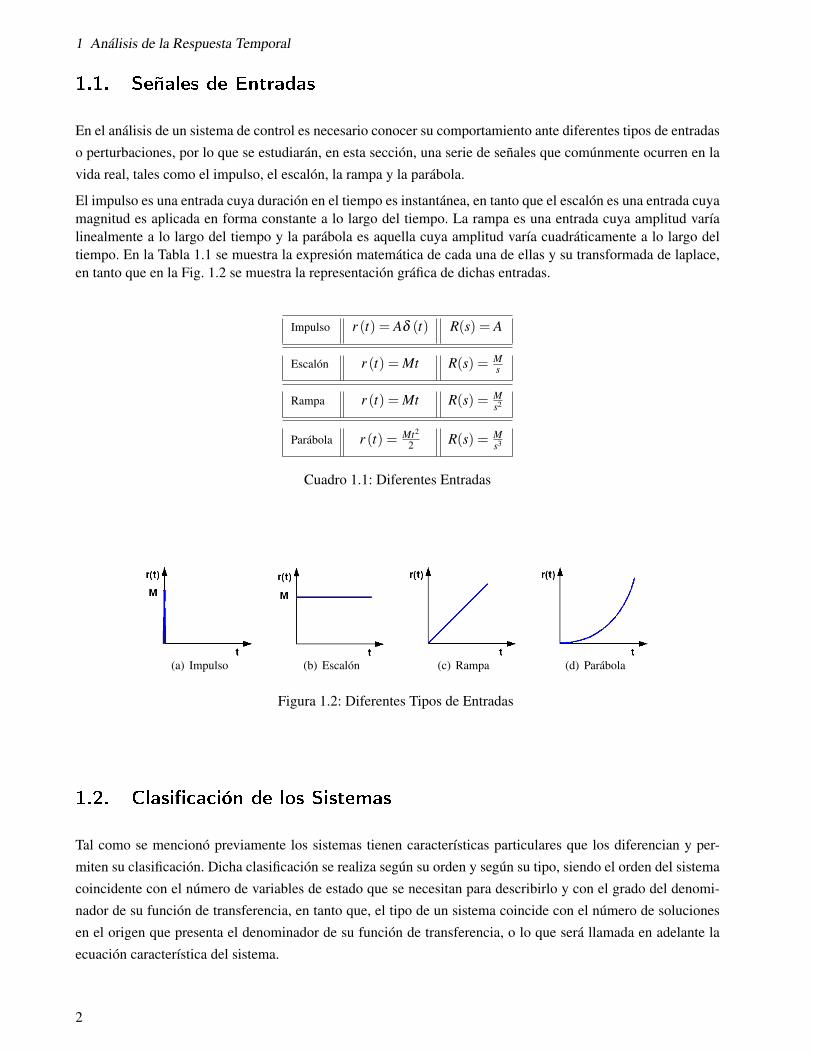
El impulso es una entrada cuya duración en el tiempo es instantánea, en tanto que el escalón es una entrada cuyamagnitud es aplicada en forma constante a lo largo del tiempo. La rampa es una entrada cuya amplitud varíalinealmente a lo largo del tiempo y la parábola es aquella cuya amplitud varía cuadráticamente a lo largo deltiempo. En la Tabla 1.1 se muestra la expresión matemática de cada una de ellas y su transformada de laplace,en tanto que en la Fig. 1.2 se muestra la representación gráfica de dichas entradas.
Impulso r (t) = Aδ (t) R(s) = A
Escalón r (t) = Mt R(s) = Ms
Rampa r (t) = Mt R(s) = Ms2
Parábola r (t) = Mt2
2 R(s) = Ms3
Cuadro 1.1: Diferentes Entradas
(a) Impulso (b) Escalón (c) Rampa (d) Parábola
Figura 1.2: Diferentes Tipos de Entradas
1.2. Clasi�cación de los Sistemas
Tal como se mencionó previamente los sistemas tienen características particulares que los diferencian y per-
miten su clasificación. Dicha clasificación se realiza según su orden y según su tipo, siendo el orden del sistema
coincidente con el número de variables de estado que se necesitan para describirlo y con el grado del denomi-
nador de su función de transferencia, en tanto que, el tipo de un sistema coincide con el número de soluciones
en el origen que presenta el denominador de su función de transferencia, o lo que será llamada en adelante la
ecuación característica del sistema.
2

1.3 Sistemas de Primer Orden
En forma general una función de transferencia puede escribirse tal como se muestra en la Ec. 1.2, donde las
soluciones del numerador se conocerán como los ceros del sistema y las soluciones del denominador como los
polos o raíces de la ecuación característica, tal como se mencionó con anterioridad. A partir de allí, sT representa
un polo de multiplicidad T en el origen, el cual coincide con el tipo del sistema.
G(s) =k (τas+1)(τbs+1) . . .(τms+1)sT (τ1s+1)(τ2s+1) . . .(τps+1)
(1.2)
A continuación se muestra el estudio detallado de la respuesta transitoria para sistemas de primer y segundo
orden, en tanto que, para sistemas de orden superior, la respuesta transitoria se aproximará a la respuesta de
sistemas de ordenes inferiores según criterios a establecerse. Así mismo, se irá destacando la influencia que
tiene el tipo del sistema en su respuesta.
1.3. Sistemas de Primer Orden
Considere que un sistema de primer orden tipo 0 puede ser representado, en forma general, utilizando una
función de transferencia como la que se muestra en la Ec. 1.3, en la cual K se define como la ganancia del sistema
y τ como su constante de tiempo. Dichos parámetros caracterizan la respuesta del sistema, tanto temporal como
permanente, tal como quedará demostrado a continuación.
C(s)R(s)
=K
τs+1(1.3)
Ante una entrada de tipo escalón de magnitud M la salida C(s) quedará expresada como sigue,
C (s) =(
Ms
)(K
τs+1
)(1.4)
La respuesta exacta en el tiempo, c(t), se encuentra separando en fracciones simples y antitransformando térmi-
no a término, para obtener finalmente c(t), tal como lo expresa la Ec. 1.6.
C (s) = MK(
1s− τ
τs+1
)(1.5)
c(t) = MK(
1− e−tτ
)(1.6)
Partiendo de dicha expresión es posible realizar un esbozo de la respuesta evaluando la misma para ciertos
valores de t.
c(0) = MK(1− e0)= 0 (1.7)
c(τ) = MK(1− e−1)= 0,632MK (1.8)
3

1 Análisis de la Respuesta Temporal
c(∞) = MK(1− e−∞
)= MK (1.9)
Utilizando la Ec. 1.8 se puede definir la constante de tiempo, τ , como el tiempo que tarda el sistema en alcanzarel 63,2% de su valor final, en tanto que, la Ec. 1.9 permite definir K como el parámetro del sistema que determinasu valor final. En la Fig. 1.3 se muestra la respuesta, ante un escalón unitario, de un sistema de primer orden,cuya constante de tiempo es igual a dos y su ganancia igual a uno. En dicha figura se puede observar la influenciade τ sobre la respuesta transitoria y la de K sobre el valor del establecimiento.
0 2 4 6 8 10 120
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo(s)
Am
plitu
d
Valor del Establecimiento
Constante de Tiempo
Figura 1.3: Respuesta al Escalón de un Sistema de Primer Orden
Cabe destacar que, el cálculo del valor del establecimiento de una variable se puede realizar a partir de su
transformada de laplace, utilizando el teorema del valor final, gracias al cual se puede conocer el valor de dicha
variable cuando el tiempo tiende a infinito. En la Ec. 1.10 se muestra dicho teorema, donde se expresa el valor
de la variable, r(t), cuando el tiempo tiende a infinito en función de su transformada de laplace, R(s). Para el
caso particular de un sistema de primer orden, cuya entrada sea un escalón de magnitud M, la transformada
de laplace de su salida C(s) se mostró previamente en la Ec. 1.5, a partir de la cual se puede obtener el valor
del establecimiento para la salida c(t) tal como se muestra en la Ec. 1.11, el cual coincide con el mostrado
previamente en la Ec.1.9.
r(∞) = lı́ms→0
sR(s) (1.10)
c(∞) = lı́ms→0
sC(s) = lı́ms→0
s[
Ms
(K
τs+1
)]= MK (1.11)
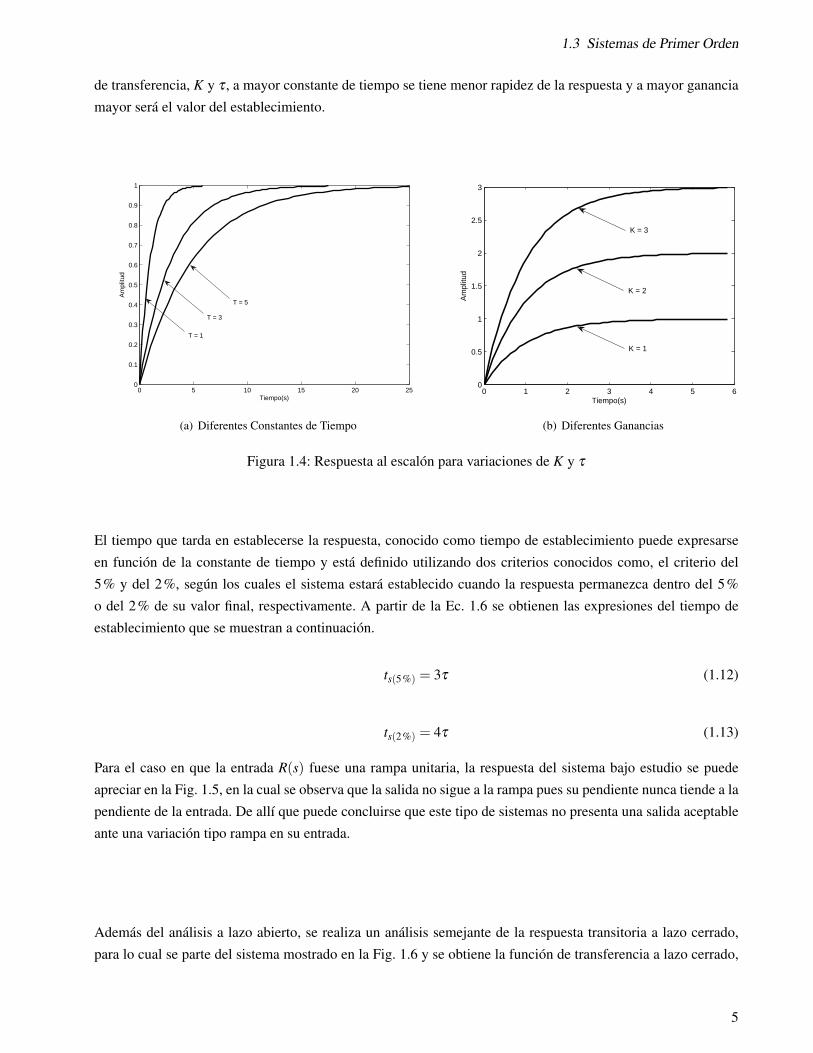
Con la intención de resaltar la influencia que tiene la constante de tiempo y la ganancia sobre la respuesta
temporal del sistema bajo estudio, se muestra en la Fig. 1.4 (a) la variación de la respuesta para modificaciones
en la constante de tiempo y en la Fig. 1.4 (b) la variación de la respuesta para modificaciones de la ganancia.
En dichas figuras se aprecia el efecto que tienen sobre la respuesta los parámetros característicos de la función
4
1.3 Sistemas de Primer Orden
de transferencia, K y τ , a mayor constante de tiempo se tiene menor rapidez de la respuesta y a mayor ganancia
mayor será el valor del establecimiento.
0 5 10 15 20 250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo(s)
Am
plitu
d
T = 1
T = 3
T = 5
(a) Diferentes Constantes de Tiempo
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
Tiempo(s)
Am
plitu
d
K = 1
K = 2
K = 3
(b) Diferentes Ganancias
Figura 1.4: Respuesta al escalón para variaciones de K y τ
El tiempo que tarda en establecerse la respuesta, conocido como tiempo de establecimiento puede expresarse
en función de la constante de tiempo y está definido utilizando dos criterios conocidos como, el criterio del
5% y del 2%, según los cuales el sistema estará establecido cuando la respuesta permanezca dentro del 5%
o del 2% de su valor final, respectivamente. A partir de la Ec. 1.6 se obtienen las expresiones del tiempo de
establecimiento que se muestran a continuación.
ts(5%) = 3τ (1.12)
ts(2%) = 4τ (1.13)
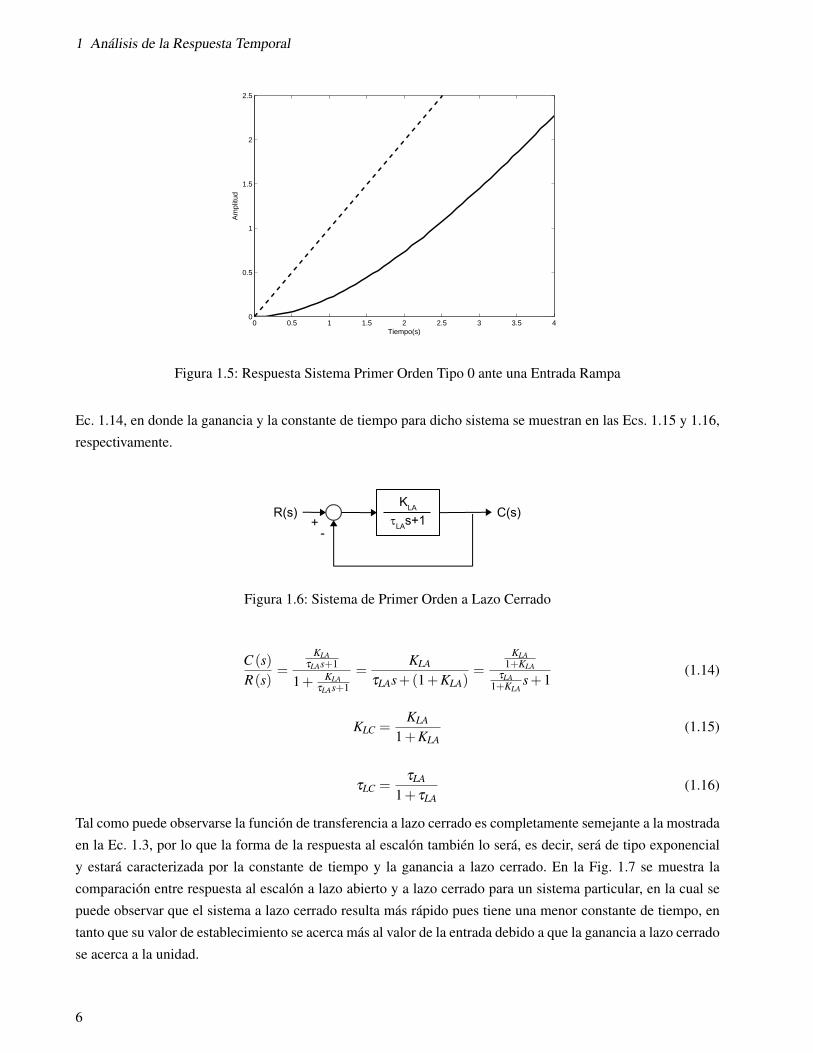
Para el caso en que la entrada R(s) fuese una rampa unitaria, la respuesta del sistema bajo estudio se puede
apreciar en la Fig. 1.5, en la cual se observa que la salida no sigue a la rampa pues su pendiente nunca tiende a la
pendiente de la entrada. De allí que puede concluirse que este tipo de sistemas no presenta una salida aceptable
ante una variación tipo rampa en su entrada.
Además del análisis a lazo abierto, se realiza un análisis semejante de la respuesta transitoria a lazo cerrado,
para lo cual se parte del sistema mostrado en la Fig. 1.6 y se obtiene la función de transferencia a lazo cerrado,
5
1 Análisis de la Respuesta Temporal
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
Tiempo(s)
Am
plitu
d
Figura 1.5: Respuesta Sistema Primer Orden Tipo 0 ante una Entrada Rampa
Ec. 1.14, en donde la ganancia y la constante de tiempo para dicho sistema se muestran en las Ecs. 1.15 y 1.16,
respectivamente.
Figura 1.6: Sistema de Primer Orden a Lazo Cerrado
C (s)R(s)
=KLA
τLAs+1
1+ KLAτLAs+1
=KLA
τLAs+(1+KLA)=
KLA1+KLA
τLA1+KLA
s+1(1.14)
KLC =KLA
1+KLA(1.15)
τLC =τLA
1+ τLA(1.16)
Tal como puede observarse la función de transferencia a lazo cerrado es completamente semejante a la mostrada
en la Ec. 1.3, por lo que la forma de la respuesta al escalón también lo será, es decir, será de tipo exponencial
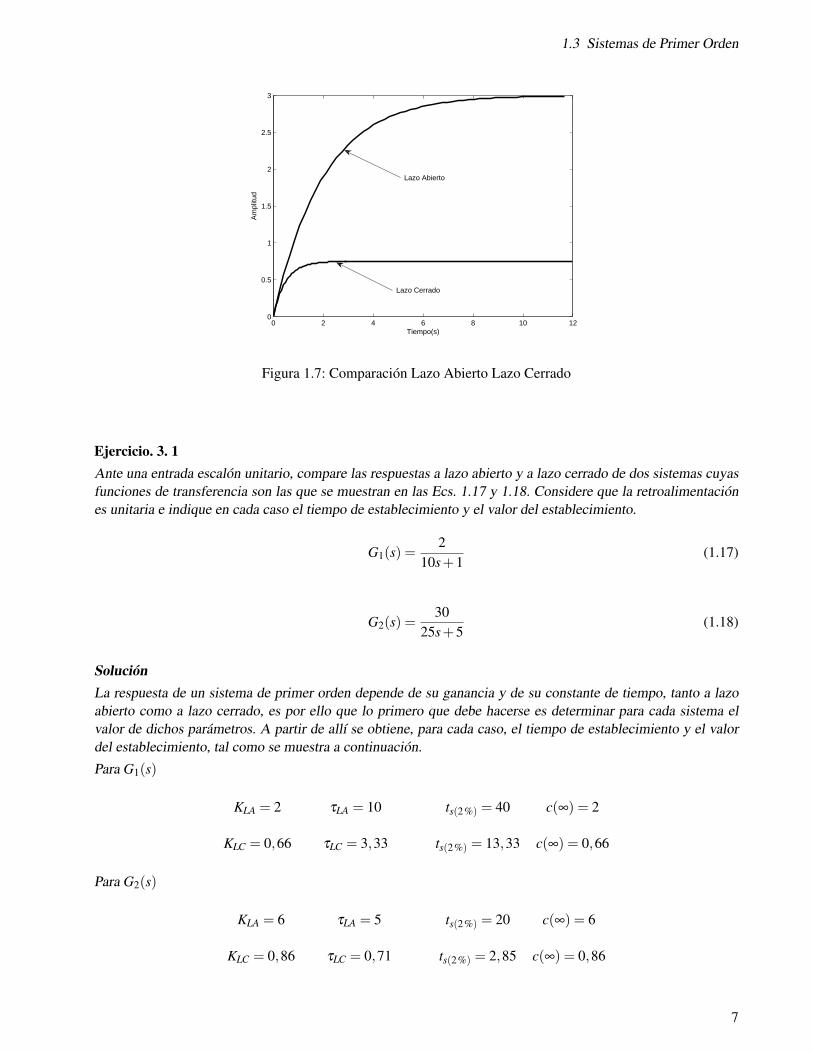
y estará caracterizada por la constante de tiempo y la ganancia a lazo cerrado. En la Fig. 1.7 se muestra la
comparación entre respuesta al escalón a lazo abierto y a lazo cerrado para un sistema particular, en la cual se
puede observar que el sistema a lazo cerrado resulta más rápido pues tiene una menor constante de tiempo, en
tanto que su valor de establecimiento se acerca más al valor de la entrada debido a que la ganancia a lazo cerrado
se acerca a la unidad.
6
1.3 Sistemas de Primer Orden
0 2 4 6 8 10 120
0.5
1
1.5
2
2.5
3
Tiempo(s)
Am
plitu
d
Lazo Abierto
Lazo Cerrado
Figura 1.7: Comparación Lazo Abierto Lazo Cerrado
Ejercicio. 3. 1Ante una entrada escalón unitario, compare las respuestas a lazo abierto y a lazo cerrado de dos sistemas cuyasfunciones de transferencia son las que se muestran en las Ecs. 1.17 y 1.18. Considere que la retroalimentaciónes unitaria e indique en cada caso el tiempo de establecimiento y el valor del establecimiento.
G1(s) =2
10s+1(1.17)
G2(s) =30
25s+5(1.18)
SoluciónLa respuesta de un sistema de primer orden depende de su ganancia y de su constante de tiempo, tanto a lazoabierto como a lazo cerrado, es por ello que lo primero que debe hacerse es determinar para cada sistema elvalor de dichos parámetros. A partir de allí se obtiene, para cada caso, el tiempo de establecimiento y el valordel establecimiento, tal como se muestra a continuación.
Para G1(s)
KLA = 2 τLA = 10 ts(2%) = 40 c(∞) = 2
KLC = 0,66 τLC = 3,33 ts(2%) = 13,33 c(∞) = 0,66
Para G2(s)
KLA = 6 τLA = 5 ts(2%) = 20 c(∞) = 6
KLC = 0,86 τLC = 0,71 ts(2%) = 2,85 c(∞) = 0,86
7

1 Análisis de la Respuesta Temporal
El estudio de la respuesta transitoria también se realiza para sistemas de primer orden de tipo I, a lazo abierto ya lazo cerrado, como los que se muestran en las Figs. 1.8 (a) y (b). Ante una entrada de tipo escalón, la respuestadel sistema a lazo abierto crece indefinidamente con una pendiente diferente a la rampa de entrada, tal comosucede con la respuesta del sistema de tipo 0 ante entrada rampa. Es por ello que se estudiará solamente larespuesta a lazo cerrado, la cual si tiene un comportamiento aceptable.
(a) Lazo Abierto (b) Lazo Cerrado
Figura 1.8: Sistema de Primer Orden Tipo Uno
Al igual que para el caso anterior se obtendrá la función de transferencia a lazo cerrado en función de los
parámetros de lazo abierto, la cual se muestra en la Ec. 1.19, a partir de la cual se observa que la ganancia a
lazo cerrado será siempre uno, independiente de los parámetros a lazo abierto, y la constante de tiempo será la
relación entre la constante de tiempo a lazo abierto y la ganancia.
C (s)R(s)
=KLAτLAs
1+ KLAτLAs
=KLA
τLAs+KLA=
1τLAKLA
s+1=
1τLCs+1
(1.19)
Como se puede observar dicha función es semejante a las funciones de transferencia mostradas previamente para
el sistema de primer orden tipo 0 (Ec. 1.3 y Ec. 1.14), por lo tanto la respuesta ante un escalón será semejante a
la desarrollada anteriormente, quedando la expresión de la salida en función del tiempo tal y como se muestra
en la Ec. 1.20. Cabe destacar que, dado que la ganancia es siempre unitaria, el valor del establecimiento a lazo
cerrado siempre coincidirá con la magnitud del escalón. En la Fig. 1.9 se muestra la respuesta a lazo cerrado
de este tipo de sistemas ante un escalón unitario, en la cual se puede apreciar que el valor del establecimiento
coincide con la entrada.
c(t) = M(
1− e−tτ
)(1.20)
8

1.3 Sistemas de Primer Orden
0 2 4 6 8 10 120
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo(s)
Am
plitu
d
Figura 1.9: Respuesta a lazo cerrado ante el escalón unitario de sistema tipo I
Para este caso también se puede analizar la respuesta ante una entrada rampa tal como sigue. Conocida la
transformada de laplace de la rampa, R(s), se obtiene la transformada de laplace de C(s) y a partir de allí la
expresión para la salida que se muestra en la Ec. 1.22.
R(s) =Ms2 ⇒C(s) =
(1s2
)(M
τs+1
)= M
(1s2 −
τ
s+
τ
s+ 1τ
)(1.21)
c(t) = M(
t− τ + τe−tτ
)(1.22)
En la Fig. 1.10 se muestra la respuesta a lazo cerrado ante una rampa unitaria para diferentes valores de K, en
la cual se puede apreciar que, cuando el tiempo tiende a infinito, el sistema presenta una salida que sigue a la
rampa pues tiene la misma pendiente. Así mismo se observa que en el estado estacionario o permanente siempre
existirá una diferencia entre la entrada y la salida que disminuye a medida que aumenta la ganancia del lazo
abierto.
9

1 Análisis de la Respuesta Temporal
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
Tiempo(s)
Am
plitu
d
K = 3
K = 1
K = 5
Figura 1.10: Respuesta a la Rampa Unitaria
Ejercicio 3.2
El proceso que se muestra en la Fig. 1.11 es un tanque abierto a la atmósfera, para el cual se tiene, en la Ec.
1.23, una expresión del modelo del mismo.
Figura 1.11: Tanque abierto a la atmósfera
Adh(t)
dt= q(t)−
(1R
)h(t) (1.23)
10

1.3 Sistemas de Primer Orden
Considerando que el valor del área del tanque es A = 6 y que la resistencia en la válvula es R = 10, se desea
conocer lo siguiente:
a) El valor de la constante de tiempo y el valor del establecimiento de la altura a lazo abierto, ante una variaciónescalón unitario en el caudal de entrada.b) Si se plantea, para la altura del tanque, un sistema de control de retroalimentación simple manipulando elcaudal a la entrada del mismo, realice el diagrama de bloques del esquema de control propuesto e implántelosobre el proceso. Calcule además, la constante de tiempo y el valor de establecimiento de la altura a lazocerrado, ante una variación del tipo escalón unitario en la referencia. Para ello, suponga unitarias las funcionesde transferencia del medidor, del controlador y del actuador.c) Finalmente se desea conocer, a lazo cerrado, la dependencia del valor del establecimiento de la altura y laconstante de tiempo del sistema con respecto al área del tanque y a la resistencia.
Solución
a) Para conocer el valor de la constante de tiempo es necesario determinar la función de transferencia entre la
altura y el caudal de entrada, lo cual se realiza a partir del modelo del proceso. Como dicho modelo es lineal, se
toma directamente la transformada de laplace de la ecuación y se obtiene la función de transferencia requerida.
AH(s) = qE(s)−(
1R
)H(s)⇒
(A+
1R
)H(s) = qE(s)
H(s)qE(s)
=R
(AR)s+1=
KProceso
(τProceso)s+1
τProceso = 60 y KProceso = 10
h(∞) = KProceso ∗M = 10∗1 ⇒ h(∞) = 10
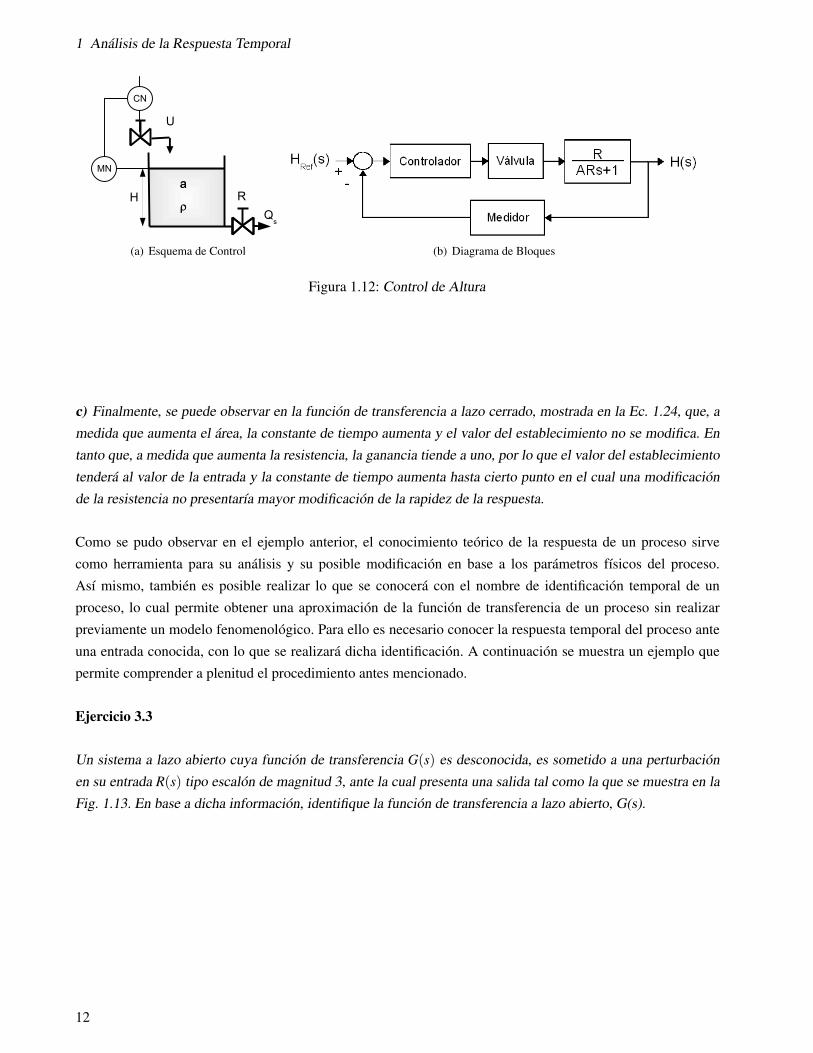
b) El esquema de control de retroalimentación simple y su diagrama de bloques se muestran en la Figs. 1.12 (a)
y (b), respectivamente. Los valores de la constante de tiempo y del valor del establecimiento se obtienen a partir
de la función de transferencia a lazo cerrado tal como sigue.
H(s)Hre f (s)
=R
ARs+1
1+ RARs+1
=R
ARs+1ARs+1+R
ARs+1
=R
1+RAR
1+R s+1=
KLC
τLCs+1(1.24)
τLC =AR
1+R=
611
y h(∞) = KLC.(1) =(
R1+R
)=
1011
11
1 Análisis de la Respuesta Temporal
(a) Esquema de Control (b) Diagrama de Bloques
Figura 1.12: Control de Altura
c) Finalmente, se puede observar en la función de transferencia a lazo cerrado, mostrada en la Ec. 1.24, que, a
medida que aumenta el área, la constante de tiempo aumenta y el valor del establecimiento no se modifica. En
tanto que, a medida que aumenta la resistencia, la ganancia tiende a uno, por lo que el valor del establecimiento
tenderá al valor de la entrada y la constante de tiempo aumenta hasta cierto punto en el cual una modificación
de la resistencia no presentaría mayor modificación de la rapidez de la respuesta.
Como se pudo observar en el ejemplo anterior, el conocimiento teórico de la respuesta de un proceso sirve
como herramienta para su análisis y su posible modificación en base a los parámetros físicos del proceso.
Así mismo, también es posible realizar lo que se conocerá con el nombre de identificación temporal de un
proceso, lo cual permite obtener una aproximación de la función de transferencia de un proceso sin realizar
previamente un modelo fenomenológico. Para ello es necesario conocer la respuesta temporal del proceso ante
una entrada conocida, con lo que se realizará dicha identificación. A continuación se muestra un ejemplo que
permite comprender a plenitud el procedimiento antes mencionado.
Ejercicio 3.3
Un sistema a lazo abierto cuya función de transferencia G(s) es desconocida, es sometido a una perturbación
en su entrada R(s) tipo escalón de magnitud 3, ante la cual presenta una salida tal como la que se muestra en la
Fig. 1.13. En base a dicha información, identifique la función de transferencia a lazo abierto, G(s).
12

1.3 Sistemas de Primer Orden
0 2 4 6 8 10 12 14 16 18 20 22 240
0.25
0.5
0.75
1
1.25
1.5
Tiempo(s)
Am
plitu
d
Figura 1.13: Respuesta Temporal ante escalón de magnitud 3
Solución
La respuesta que se observa es exponencial sin ninguna oscilación, razón por la cual se aproximará la función
de transferencia a la función de un sistema de primer orden de tipo cero pues si fuese de tipo uno la respuesta
crecería indefinidamente. Los parámetros de dicha función se calcularán a partir de la información que se obtiene
de la respuesta tal como sigue.
c(∞) = KM 1,5 = K ∗3 ⇒ K = 0,5
c(τ) = 0,632∗ c(∞) c(τ) = 0,948 ⇒ τ = 4,5
Por lo tanto, la función de transferencia a la cual se aproximará el sistema será la siguiente.
G(s) =0,54,5s
+1
Ejercicio 3.4
En el sistema de control de un proceso de preformado que se muestra en la Fig. 1.14, se desea mantener latemperatura de salida T [oC] en un valor dado, manejando la presión P [psi]. Con la intención de poder evaluarlos parámetros propios del proceso, se produce una variación en dicha presión igual a 10 psi, obteniéndose unarespuesta en la temperatura tal como se muestra en la Fig. 1.15. A partir de allí se desea que usted realice losiguiente:
a) Identifique los valores de M y N .
b) Una vez identificados dichos valores calcule el valor que debe tener la ganancia del controlador, Kc, tal queel sistema de control tenga un tiempo de establecimiento al 2% igual a 2 seg.
c) Obtenga además, el valor de establecimiento de la temperatura, ante un escalón unitario, para el valor de Kc
calculado anteriormente
13
1 Análisis de la Respuesta Temporal
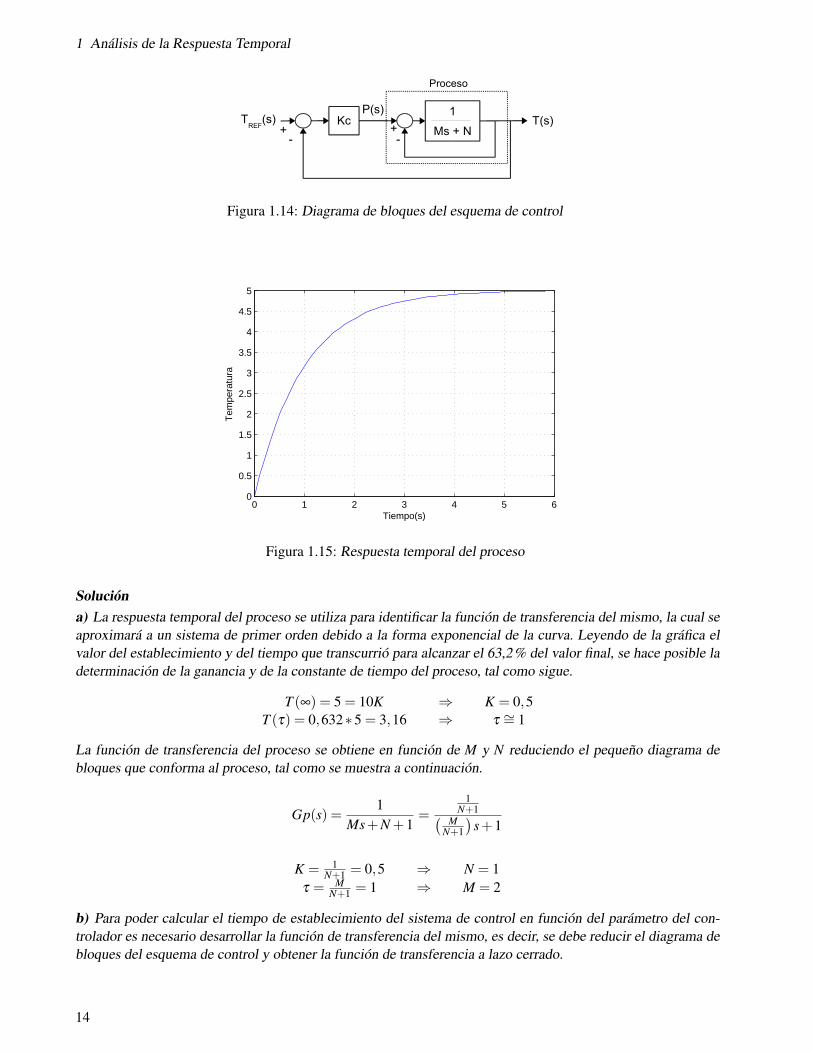
Figura 1.14: Diagrama de bloques del esquema de control
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Tiempo(s)
Tem
pera
tura
Figura 1.15: Respuesta temporal del proceso
Solucióna) La respuesta temporal del proceso se utiliza para identificar la función de transferencia del mismo, la cual seaproximará a un sistema de primer orden debido a la forma exponencial de la curva. Leyendo de la gráfica elvalor del establecimiento y del tiempo que transcurrió para alcanzar el 63,2% del valor final, se hace posible ladeterminación de la ganancia y de la constante de tiempo del proceso, tal como sigue.
T (∞) = 5 = 10K ⇒ K = 0,5T (τ) = 0,632∗5 = 3,16 ⇒ τ ∼= 1
La función de transferencia del proceso se obtiene en función de M y N reduciendo el pequeño diagrama debloques que conforma al proceso, tal como se muestra a continuación.
Gp(s) =1
Ms+N +1=
1N+1( M
N+1
)s+1
K = 1N+1 = 0,5 ⇒ N = 1
τ = MN+1 = 1 ⇒ M = 2
b) Para poder calcular el tiempo de establecimiento del sistema de control en función del parámetro del con-trolador es necesario desarrollar la función de transferencia del mismo, es decir, se debe reducir el diagrama debloques del esquema de control y obtener la función de transferencia a lazo cerrado.
14

1.4 Sistemas de Segundo Orden
GLC(s) =T (s)
TREF(s)=
0,5Kc
s+1+0,5Kc=
0,5Kc1+0,5Kc(1
1+0,5Kc
)s+1
ts(2%) = 4τ ⇒ 41+0,5Kc
= 2 ⇒ Kc = 2
c) El valor del establecimiento para la temperatura será igual a la ganancia del sistema de control pues lamagnitud del escalón es unitaria.
T (∞) =0,5Kc
1+0,5Kc= 0,5
1.4. Sistemas de Segundo Orden
Los sistemas de segundo orden presentan dos variables que caracterizan su respuesta, tal como se definió pre-
viamente, por lo que su función de transferencia presentará un denominador de segundo grado y podrán ser de
tipo 0 o de tipo I, según el número de polos en el origen que tengan.
La función de transferencia para sistemas de segundo orden de tipo 0 puede ser escrita en forma general tal
como se muestra en la Ec. 1.25, en la cual K se conoce como la ganancia del sistema, ζ como el coeficiente de
amortiguación y ωn como la frecuencia natural del sistema.
G(s) =C(s)R(s)
=Kω2
n
s2 +2ζ ωns+ω2n
(1.25)
El comportamiento dinámico de un sistema de segundo orden se describe en términos de ζ y ωn, los cuales
estarán en función de los parámetros físicos del sistema. Así mismo, la respuesta permanente dependerá del
valor de la ganancia tal como en el caso de los sistemas de primer orden. Según el valor del coeficiente de
amortiguamiento los sistemas de segundo orden se clasifican como sigue.
Sistemas Subamortiguados para (0 < ζ < 1)Sistemas Críticamente Amortiguados para (ζ = 1)Sistemas Sobreamortiguados para (ζ > 1)
A continuación se presentarán las respuestas exactas del sistema bajo estudio ante una entrada escalón de mag-nitud M, las cuales dependerán del amortiguamiento del sistema. Para la obtención de dichas respuestas se sigueel mismo procedimiento que se describió para el caso de los sistemas de primer orden.
Sistemas Subamortiguados (0 < ζ < 1)
c(t) = KM
(1− e−ζ ωnt
(cosωdt +
ζ√1−ζ 2
senωdt
))(1.26)
La respuesta transitoria tiene una frecuencia de oscilación igual a ωd que se conoce como la frecuencia natural
amortiguada del sistema y viene dada por la expresión que se muestra en la Ec. 1.27.
15

1 Análisis de la Respuesta Temporal
ωd = ωn√
1−ζ 2 (1.27)
Sistemas Críticamente Amortiguados (ζ = 1)
c(t) = KM(1− e−ωnt (1+ωnt)
)(1.28)
Se puede apreciar que esta respuesta no será oscilatoria sino de tipo exponencial, por lo que se parecerá a la
respuesta del sistema de primer orden.
Sistemas sobreamortiguados (ζ > 1)
c(t) = KM
(1+
ωn
2√
ζ 2−1
(e−s1t
s1− e−s2t
s2
))(1.29)
donde s1 y s2 son las soluciones de la ecuación característica, o denominador de la función de transferencia, las
cuales se muestran en las Ecs. 1.30 y 1.31 respectivamente.
s1 = ωn
(ζ +
√ζ 2−1
)(1.30)
s2 = ωn
(ζ −
√ζ 2−1
)(1.31)
Esta respuesta incluye dos términos de caída exponencial, pero cuando ζ � 1, uno de los dos términos se hace
despreciable frente al otro y puede utilizarse la solución aproximada, que se muestra en la Ec. 1.32, despreciando
s1, pues |s1| � |s2| y la exponencial respectiva desaparecerá o decaerá más rapidamente que la otra.
c(t) = KM
(1− e
−ζ ωn
(1−√
ζ 2−1ζ
)t)
(1.32)
Para tres diferentes valores de ζ , menor, igual y mayor que uno, se muestra en la Fig. 1.16 la respuesta del
sistema de segundo orden bajo estudio, ante un escalón un escalón unitario. En la misma puede observarse, que
la respuesta de los sistemas críticamente amortiguado y sobreamortiguado resultan semejantes a la respuesta
de los sistemas de primer orden, es decir, son respuestas que crecerán en forma exponencial hasta alcanzar su
establecimiento en un valor igual a KM, por lo que podrán ser caracterizadas a través de su ganancia y del
aproximado de su constante de tiempo. Solamente, para el caso de los sistemas subamortiguados, la respues-
ta presentará oscilaciones para finalmente establecerse igualmente en KM. Es por ello que a continuación se
realizará un análisis detallado de las respuesta de estos últimos.
16
1.4 Sistemas de Segundo Orden
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo(s)
Am
plitu
d
Sobreamortiguado
Críticamente Amortiguado
Subamortiguado
Figura 1.16: Respuesta Sistemas de Segundo Orden
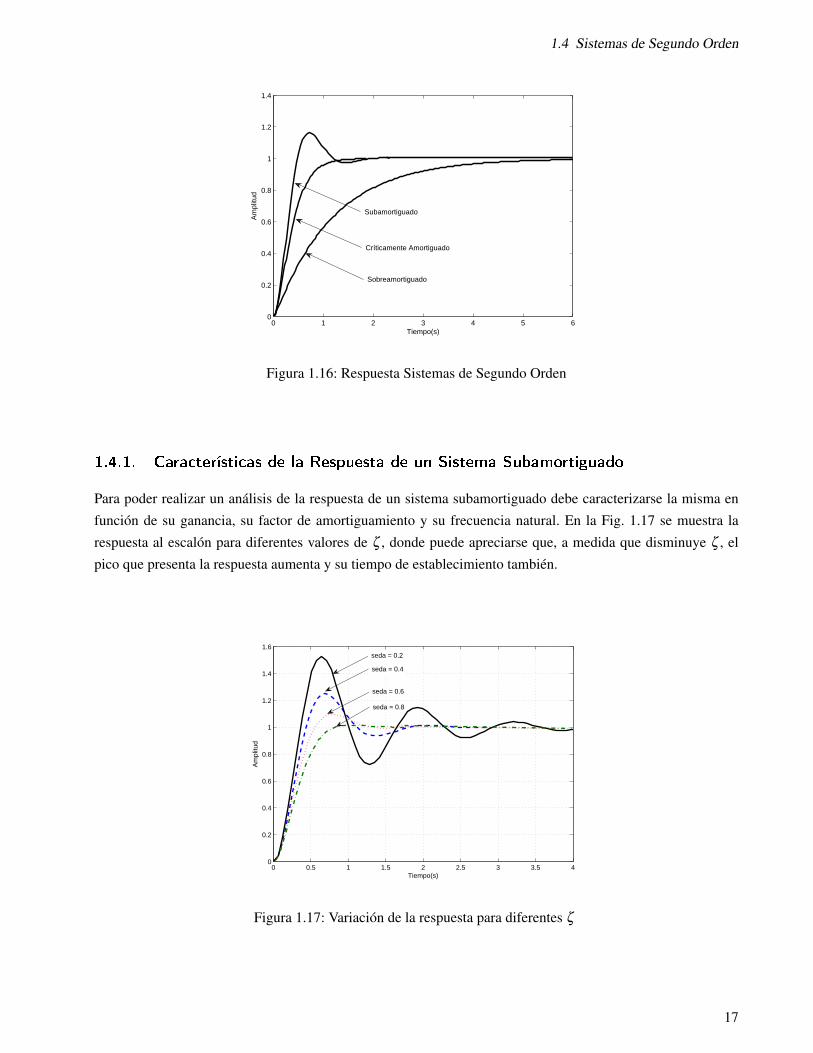
1.4.1. Características de la Respuesta de un Sistema Subamortiguado
Para poder realizar un análisis de la respuesta de un sistema subamortiguado debe caracterizarse la misma en
función de su ganancia, su factor de amortiguamiento y su frecuencia natural. En la Fig. 1.17 se muestra la
respuesta al escalón para diferentes valores de ζ , donde puede apreciarse que, a medida que disminuye ζ , el
pico que presenta la respuesta aumenta y su tiempo de establecimiento también.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Tiempo(s)
Am
plitu
d
seda = 0.2
seda = 0.4
seda = 0.6
seda = 0.8
Figura 1.17: Variación de la respuesta para diferentes ζ
17
1 Análisis de la Respuesta Temporal
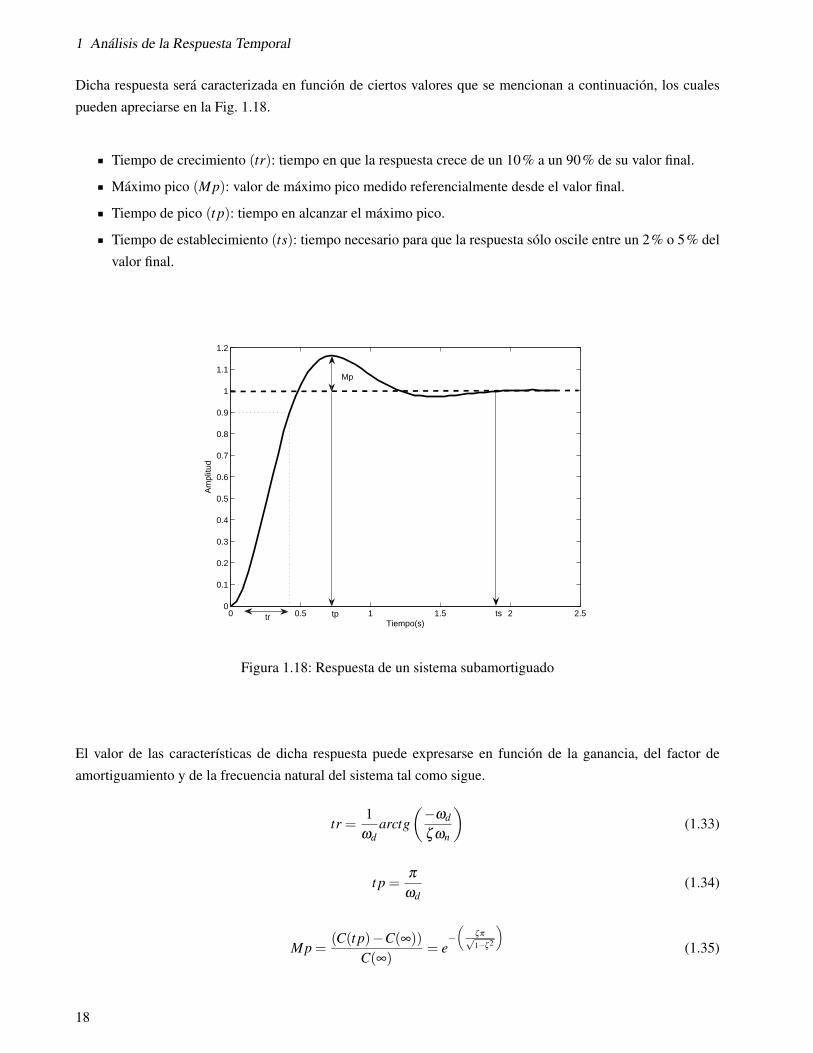
Dicha respuesta será caracterizada en función de ciertos valores que se mencionan a continuación, los cuales
pueden apreciarse en la Fig. 1.18.
Tiempo de crecimiento (tr): tiempo en que la respuesta crece de un 10% a un 90% de su valor final.
Máximo pico (Mp): valor de máximo pico medido referencialmente desde el valor final.
Tiempo de pico (t p): tiempo en alcanzar el máximo pico.
Tiempo de establecimiento (ts): tiempo necesario para que la respuesta sólo oscile entre un 2% o 5% del
valor final.
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Tiempo(s)
Am
plitu
d
Mp
tp tstr
Figura 1.18: Respuesta de un sistema subamortiguado
El valor de las características de dicha respuesta puede expresarse en función de la ganancia, del factor de
amortiguamiento y de la frecuencia natural del sistema tal como sigue.
tr =1
ωdarctg
(−ωd
ζ ωn
)(1.33)
t p =π
ωd(1.34)
Mp =(C(t p)−C(∞))
C(∞)= e−(
ζ π√1−ζ 2
)(1.35)
18

1.4 Sistemas de Segundo Orden
ts(2%) =4
ζ ωn(1.36)
ts(5%) =3
ζ ωn(1.37)
c(∞) = KM (1.38)
De esta forma la respuesta de los sistemas de segundo orden de tipo 0 queda completamente determinada en
función de los parámetros característicos de su función de transferencia.
Ejercicio 3.5
Para un sistema que se ve sometido a una entrada escalón unitario y cuya función de transferencia se muestra
en la Ec. 1.39, se desea que usted calcule lo siguiente.
G(s) =2
s2 +2s+1(1.39)
a) El valor de ζ , ωn, Mp, ts2% y valor de establecimiento.
b) Considere ahora que dicha función de transferencia, G(s), corresponde con la función de transferencia delazo abierto de un proceso y se desea conocer como será la respuesta a lazo cerrado para una retroalimentaciónunitaria. Para ello, calcule el Mp, ts2% y valor de establecimiento y compárelos con los de lazo abierto queobtuvo previamente.
c) Si se duplicara la ganancia del sistema de lazo abierto, ¿Qué modificaciones presentaría la respuesta a lazocerrado?
Solución
a) Para obtener dicha información a partir de la función de transferencia, la misma debe reescribirse de forma
tal que sus coeficientes puedan ser igualados a los que presenta la forma general de la función de transferencia
que se mostró en la Ec. 1.25. De allí que, igualando coeficientes entre esta ecuación y la ecuación general, se
tiene, se obtienen los valores de los parámetros característicos de la función de transferencia, tal como sigue.
G(s) =0,5
(s2 +0,5s+0,25)(1.40)
Kω2n = 0,5 2ζ ωn = 0,5 ω2
n = 0,25
K = 2 ωn = 0,5 ζ = 0,5
Conocidos dichos valores es posible calcular el máximo pico, el tiempo de establecimiento y el valor de es-
tablecimiento, tal como se muestra a continuación.
19

1 Análisis de la Respuesta Temporal
Mp = e−(
ζ π√1−ζ 2
)= 0,163 ts2% = 4
ζ ωn= 16 c(∞) = KM = 2
b) Para obtener lo solicitado se debe desarrollar la función de transferencia a lazo cerrado tal como sigue,
GLC(s) =0,5
(s2+0,5s+0,25)
1+ 0,5(s2+0,5s+0,25)
=0,5
s2 +0,5s+0,75(1.41)
De igual forma que en el caso anterior, se iguala dicha función de transferencia con la forma general mostrada
en la Ec. 1.25 y se obtiene lo deseado.
KLCω2nLC
= 0,5 2ζLCωnLC = 0,5 ω2nLC
= 0,75
KLC = 0,66 ωnLC = 0,86 ζLC = 0,288
MpLC = 0,388 ts2%LC = 16 c(∞) = KLCM = 0,66
Como se puede apreciar el sistema a lazo cerrado presenta modificaciones en su respuesta. Mantiene el tiempo de
establecimiento pero tiene un menor factor de amortiguación, por lo que aumenta su máximo pico, desmejorando
su respuesta transitoria. En cuánto a su respuesta permanente, su establecimiento se acerca un poco más al valor
de la entrada.
c) Se le añade la ganancia al lazo abierto y se obtiene la función de transferencia a lazo cerrado.
GLC(s) =2(0,5)
(s2+0,5s+0,25)
1+ 2(0,5)(s2+0,5s+0,25)
=1
s2 +0,5s+1,25
KLCω2nLC
= 1 2ζLCωnLC = 0,5 ω2nLC
= 1,25
KLC = 0,8 ωnLC = 1,11 ζLC = 0,223
MpLC = 0,486 ts2%LC = 16 KLCM = 0,8
Como puede apreciarse, a medida que aumenta la ganancia de lazo abierto, la respuesta transitoria desmejora
pues su máximo pico también aumenta, en tanto que el tiempo de establecimiento no se altera. En cuánto a la
respuesta permanente se puede decir que mejora, pues el valor del establecimiento se acerca cada vez más al
valor de la entrada.
Los sistemas de segundo orden también pueden ser de tipo I y presentarían una función de transferencia, que en
forma general, puede ser escrita tal como se muestra en la Ec. 1.42.
20
1.4 Sistemas de Segundo Orden
G(s) =KLA
s(τLAs+1)(1.42)
Al igual que para los sistemas de primer orden tipo I, su respuesta a lazo abierto ante una entrada acotada no
presenta un valor de establecimiento, por lo que solamente su respuesta a lazo cerrado será analizada en detalle
partiendo de la función de transferencia que se muestra en la Ec. 1.43.
GLC(s) =KLA
s(τs+1)
1+ KLAs(τs+1)
=KLA
τ
s2 + 1τs+ KLA
τ
=KLCω2
nLC
s2 +2ξLCωnLC s+ω2nLC
(1.43)
A partir de dicha ecuación se puede concluir que un sistema de segundo orden de tipo I a lazo cerrado tendrá
una función de transferencia semejante a la que se muestra en la Ec. 1.25, por lo que su respuesta podrá ser
analizada en forma semejante. En principio, resalta el hecho de que la ganancia será igual a uno independiente
de los parámetros de la función, por lo que su respuesta a lazo cerrado ante una entrada escalón, presentará un
valor de establecimiento igual a la magnitud del escalón, tal y como resultó con los sistemas de primer orden de
tipo I.
Cabe destacar que, en cuánto a la identificación temporal de un sistema de segundo orden, ésto será posible
para el caso de sistemas subamortiguados, cuya respuesta permite un reconocimiento sencillo de los parámetros
característicos de la función de transferencia, pero en el caso que los sistemas sean críticamente amortiguados o
sobreamortiguados y presenten una respuesta de tipo exponencial, los mismos solamente podrán ser identifica-
dos como sistemas de primer orden. Es importante recordar que la identificación temporal es un procedimiento
muy sencillo que permite obtener una aproximación de la función de transferencia de un proceso pero que
presentará como limitación lo mencionado anteriormente.
Ejemplo 3.5
Un sistema a lazo abierto que fue sometido a una perturbación de tipo escalón de magnitud 2, presentó unarespuesta como la que se muestra en la Fig. 1.19. En base a dicha información, identifique la función de trans-ferencia.
21

1 Análisis de la Respuesta Temporal
0 0.5 1 1.5 20
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Tiempo(s)
Am
plitu
d
(a) Respuesta Temporal
Figura 1.19: Respuesta temporal de G(s) ante una perturbación escalón de magnitud 2
Solución
Ante una entrada del tipo escalón, con una magnitud igual a 2, se observa una respuesta oscilatoria que logra
establecerse en un valor final, razón por la cual se aproximará la función de transferencia a la función de un
sistema de segundo orden subamortiguado. Por ser una respuesta a lazo abierto la función de transferencia
debe ser de tipo cero, pues si fuese de tipo uno la respuesta crecería indefinidamente. Finalmente la forma
de la función de transferencia aproximada será igual a la presentada previamente en la Ec. 1.25, pudiéndose
calcular los parámetros de dicha función a partir de la información que ofrece la gráfica. Se sabe que el valor del
establecimiento es igual al valor de la ganancia por la magnitud del escalón y que los valores de ζ y ωn pueden
ser calculados a partir del valor del Mp y del t p. De allí que, la identificación de la función de transferencia
solicitada quedaría como sigue.
c(∞) = KM = 0,4⇒ K = 0,42 ⇒ K = 0,2
Mp =(
0,47−0,40,4
)= 0,175⇒ ζ = 0,49
t p = 0,7⇒ ωn = 5,13
Por lo tanto, la función de transferencia a la cual se aproximará el sistema será la que se muestra a continuación.
G(s) = 5,26s2+4,97s+26,34
Ejercicio 3.6
22

1.4 Sistemas de Segundo Orden
Considere que un esquema de control como el que se muestra en la Fig. 1.20, que se ve sometido a un escalón
de magnitud 0,4 en su referencia, presenta una respuesta en su salida igual a la del ejemplo anterior, es decir a
la mostrada en la Fig. 1.19. A partir de allí, se solicita identificar la función de transferencia G(s).
Figura 1.20: Esquema de Control
Solución
Ante una entrada del tipo escalón de magnitud M = 0,4, se observa una respuesta oscilatoria que logra estable-
cerse en un valor final igual a la entrada, razón por la cual se puede concluir que la función de transferencia a
lazo abierto, G(s), puede aproximarse a un sistema de segundo orden de tipo I, es por ello que la forma de la
función de transferencia aproximada será igual a la presentada previamente en la Ec. 1.42.
A partir de la respuesta conocida es posible identificar a la función de transferencia a lazo cerrado, donde el Mp y
el t p son los mismos del ejercicio anterior, por lo que ξ y ωn serán iguales a los determinados anteriormente. En
cuanto a la ganancia, debido a que la salida tiende a establecerse en el mismo valor que la entrada, la ganancia
será uno, quedando la función de transferencia a lazo cerrado como sigue.
GLC(s) = 26,34s2+4,97s+26,34
A partir de lo anterior se puede calcular G(s) de dos formas diferentes, las cuales se muestran a continuación.
Método 1
Se despeja la función de transferencia a lazo a abierto en función de la de lazo cerrado.
GLC(s) =G(s)
1+G(s)
G(s) =GLC(s)
1−GLC(s)=
26,34s2+4,97s+26,34
1− 26,34s2+4,97s+26,34
=26,34
s2 +4,97s=
5,29s(0,2s+1)
Método 2
Se obtiene la función de transferencia en función de los parámetros de la de lazo abierto y por igualación de
coeficientes se obtienen los parámetros a lazo abierto.
GLC(s) =KLA
τ
s2 + 1τs+ KLA
τ
=KLCω2
nLC
s2 +2ζLCωnLC s+ω2nLC
=26,34
s2 +4,97s+26,34
23

1 Análisis de la Respuesta Temporal
KLAτ
= 26,34 1τ
= 4,97KLA = 5,29 τ = 0,2
G(s) =5,29
s(0,2s+1)
1.5. Localización de las Raíces en el Plano y su In�uencia en la
Respuesta Transitoria
La respuesta transitoria de un sistema depende de la función de transferencia del mismo y de la entrada a la cualse vea sometido, tal como se pudo apreciar en la sección anterior, pero es posible tener una muy buena aprox-imación de dicha respuesta utilizando solamente la ecuación característica del sistema y sus soluciones. Paraello se analizará, en esta sección, la influencia que tienen la ubicación de las raíces de la ecuación característicade un sistema en el plano s.
En la Ec. 1.44 se muestra una forma general para representar la función de transferencia de un sistema, en lacual f1(s) y f2(s) son polinomios de s, donde las raíces de f1(s) se conocen como los ceros del sistema y lasraíces de f2(s) como los polos, los cuales coinciden con las raíces de la ecuación característica del sistema.
G(s) =f1(s)f2(s)
(1.44)
A continuación se mostrará de que forma la respuesta transitoria de un sistema cualquiera depende del número
de polos del mismo y de su ubicación en el plano s, independiente de si trata de un sistema a lazo abierto o a lazo
cerrado. Se analizarán detalladamente de que forma la ubicación de las raíces determina la respuesta transitoria
de los sistemas de primer y segundo orden y se mostrará como podrá ser analizada la respuesta transitoria para
sistemas de orden superior.
1.5.1. Sistemas de Primer Orden
Como se mencionó anteriormente la respuesta dependerá de los polos del sistema y para un sistema de primer
orden solamente se tiene una solución de la ecuación característica, por lo que la respuesta dependerá de la
ubicación de dicho polo. A partir de la función de transferencia, escrita en forma general, que se mostró en la
Ec. 1.3, la ecuación característica será la que se muestra a continuación.
τs+1 = 0⇒ s =−1τ
(1.45)
Como puede observarse la ubicación del polo dependerá del valor de τ , mientras mayor sea la constante de
tiempo su rapidez de respuesta será menor y se encontrará más cerca del eje imaginario. Si se comparan tres
sistemas de primer orden cuyas constantes de tiempo τ1, τ2 y τ3 cumplen con la relación τ1 > τ2 > τ3, los
mismos podrán ser representados en el plano s como se muestra en la Fig. 1.21.
24

1.5 Localización de las Raíces en el Plano y su Influencia en la Respuesta Transitoria
Figura 1.21: Ubicación en el Plano Sistemas de Primer Orden
Tal como se mencionó anteriormente, se puede observar que dependiendo del valor de la constante de tiempo la
raíz se ubicará más cerca o más lejos del eje imaginario, lo que dará una indicación de la rapidez de la respuesta
del sistema. Mientras más cerca del eje imaginario se encuentren las raíces, más tiempo tardará el sistema
en establecerse. Esto último puede reforzarse si utilizamos las expresiones del tiempo de establecimiento que
fueron previamente definidas por las Ecs. 1.12 y 1.13, en las cuales es claro que, a medida que aumenta la
constante de tiempo, el tiempo de establecimiento también aumenta. Adicionalmente, en la Fig. 1.4 (a), que se
mostró anteriormente, se observa la influencia de la constante de tiempo o ubicación de la raíz en el plano, sobre
la respuesta transitoria, en la cual, tal como era de esperarse, a medida que el polo del sistema se encuentra máss
cerca del eje imaginario mayor es el tiempo de establecimiento del sistema.
1.5.2. Sistemas de Segundo Orden
Las soluciones de la ecuación característica o polos del sistema, para el caso de sistemas de segundo orden,quedan expresadas en función de ζ y ωn, tal como se aprecia en la Ec. 1.46. Dichas soluciones serán reales oconjugadas dependiendo del valor de ζ .
s =−ζ ωn±ωn√
ζ 2−1 (1.46)
Cuando ζ > 1 los polos son reales y diferentes, los cuales a medida que aumenta ζ se separan más. Cuando ζ =1 los polos son reales e iguales y cuando ζ < 1 los polos son un par de raíces conjugadas. En los dos primeroscasos la respuesta transitoria estará compuesta por la contribución de dos polos reales y podrá ser aproximadaal polo que se encuentre más cerca del eje imaginario, por ser aquel cuyo tiempo de establecimeinto perduramás. Para el caso de los sistemas subamortiguados, se detalla en la Fig. 1.22 la correspondencia que tiene laubicación de las raíces con los parámetros característicos del sistema, es decir, con ζ y ωn.
En la Fig. 1.23, se resaltan las características que compartirían diferentes sistemas de segundo orden dependi-endo de la ubicación de sus raíces en el plano s. Aquellos sistemas cuyos polos se encuentran sobre las líneas
25
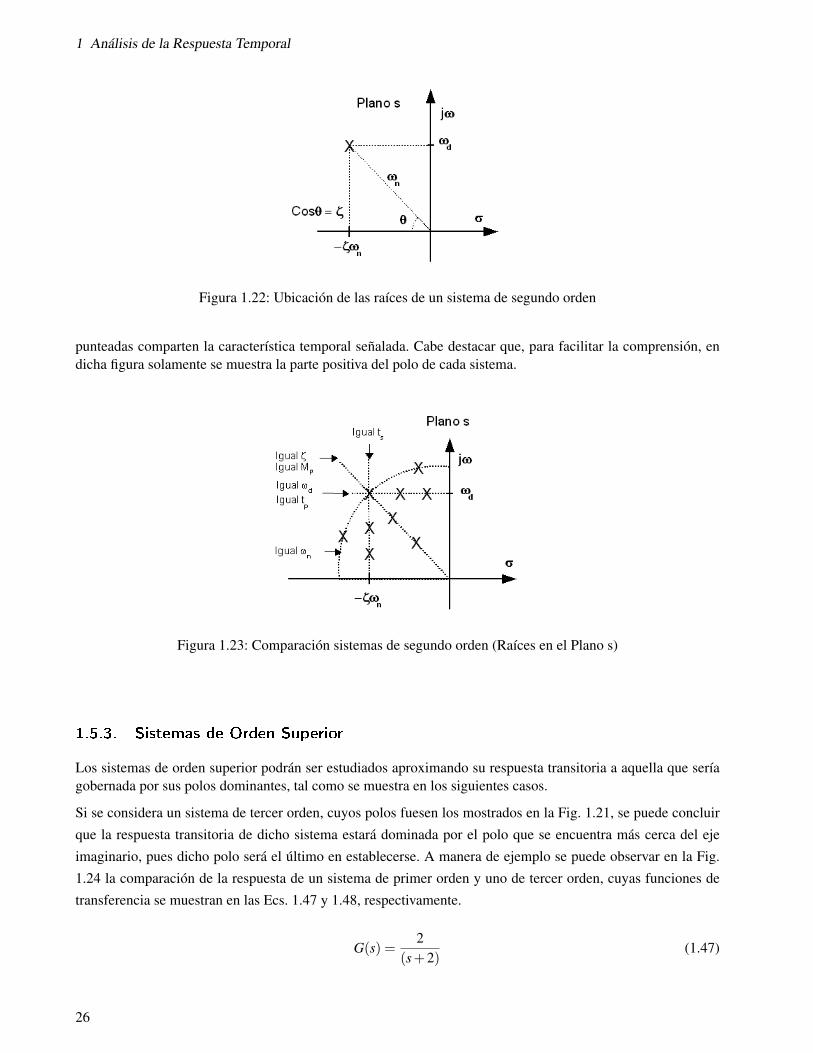
1 Análisis de la Respuesta Temporal
Figura 1.22: Ubicación de las raíces de un sistema de segundo orden
punteadas comparten la característica temporal señalada. Cabe destacar que, para facilitar la comprensión, endicha figura solamente se muestra la parte positiva del polo de cada sistema.
Figura 1.23: Comparación sistemas de segundo orden (Raíces en el Plano s)
1.5.3. Sistemas de Orden Superior
Los sistemas de orden superior podrán ser estudiados aproximando su respuesta transitoria a aquella que seríagobernada por sus polos dominantes, tal como se muestra en los siguientes casos.
Si se considera un sistema de tercer orden, cuyos polos fuesen los mostrados en la Fig. 1.21, se puede concluir
que la respuesta transitoria de dicho sistema estará dominada por el polo que se encuentra más cerca del eje
imaginario, pues dicho polo será el último en establecerse. A manera de ejemplo se puede observar en la Fig.
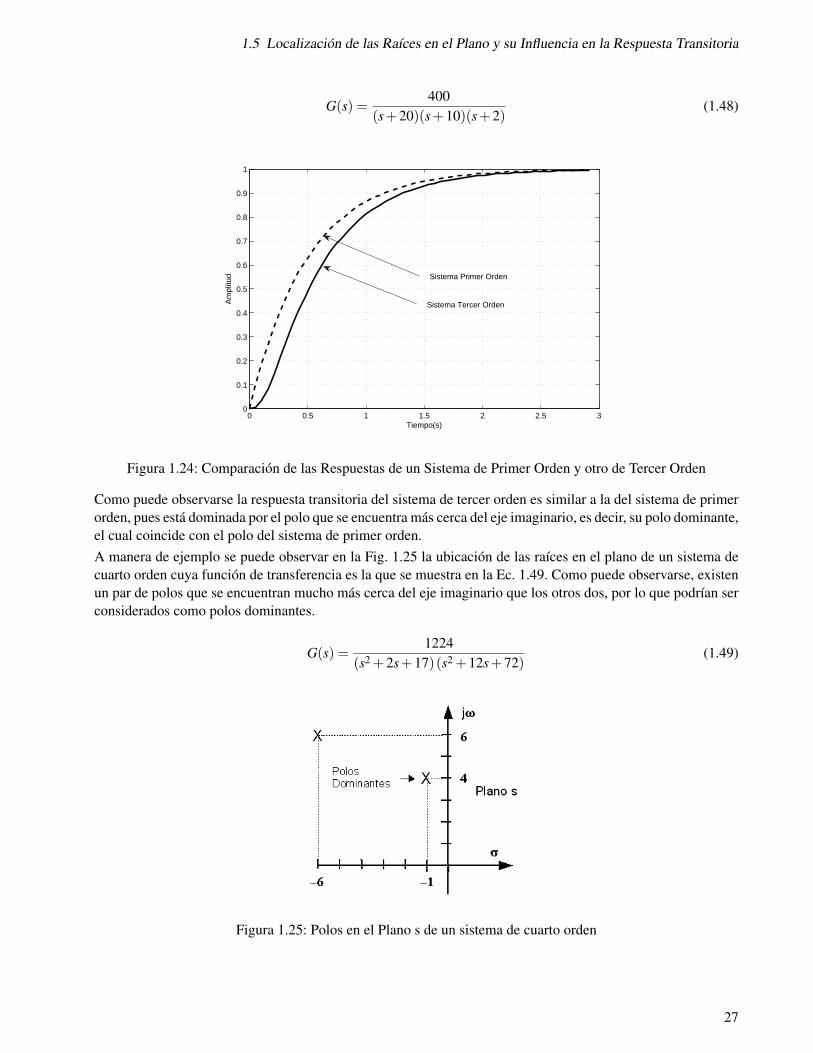
1.24 la comparación de la respuesta de un sistema de primer orden y uno de tercer orden, cuyas funciones de
transferencia se muestran en las Ecs. 1.47 y 1.48, respectivamente.
G(s) =2
(s+2)(1.47)
26
1.5 Localización de las Raíces en el Plano y su Influencia en la Respuesta Transitoria
G(s) =400
(s+20)(s+10)(s+2)(1.48)
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo(s)
Am
plitu
d Sistema Primer Orden
Sistema Tercer Orden
Figura 1.24: Comparación de las Respuestas de un Sistema de Primer Orden y otro de Tercer Orden
Como puede observarse la respuesta transitoria del sistema de tercer orden es similar a la del sistema de primerorden, pues está dominada por el polo que se encuentra más cerca del eje imaginario, es decir, su polo dominante,el cual coincide con el polo del sistema de primer orden.A manera de ejemplo se puede observar en la Fig. 1.25 la ubicación de las raíces en el plano de un sistema decuarto orden cuya función de transferencia es la que se muestra en la Ec. 1.49. Como puede observarse, existenun par de polos que se encuentran mucho más cerca del eje imaginario que los otros dos, por lo que podrían serconsiderados como polos dominantes.
G(s) =1224
(s2 +2s+17)(s2 +12s+72)(1.49)
Figura 1.25: Polos en el Plano s de un sistema de cuarto orden
27

1 Análisis de la Respuesta Temporal
Con la intención de verificar lo aceptable de la aproximación de la respuesta transitoria a sus polos dominantes,se muestra en la Fig. 1.26 la respuesta ante el escalón unitario del sistema completo y de cada uno de los sistemasde segundo orden que lo componen, garantizándose en todos los casos que la ganancia fuese unitaria para lograruna mejor comparación visual entre las respuestas mostradas.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
Tiempo(s)
Am
plitu
d Polos Dominantes
Sistema completo
Polos No Dominantes
Figura 1.26: Comparación entre la respuesta de un sistema de cuarto orden
Como puede observarse la respuesta transitoria del sistema completo es bastante similar a la respuesta delsistema de segundo orden que tiene como soluciones a los polos dominantes del sistema de cuarto orden. De allíque se puede concluir que la respuesta del sistema completa podrá ser aproximada a la de sus polos dominantes.
Un sistema de control a lazo cerrado puede ser representado como se muestra en la Fig. 1.27, donde Gc(s), Ga(s),Gp(s) y Gm(s) representan en forma general las funciones de transferencia del controlador, actuador, proceso
y medidor respectivamente. Como se puede apreciar en la Ec. 1.50 la ecuación característica del sistema de
control, es decir, la ecuación característica a lazo cerrado, dependerá de dichas funciones de transferencia, por
lo que la respuesta también dependerá de ellas. Como en los sistemas de control las funciones de transferen-
cia del actuador, proceso y medidor, generalmente, no son modificables, la respuesta del sistema dependerá
exclusivamente del controlador que se añada.
Figura 1.27: Sistema de Control
28

1.6 Error en Estado Estacionario
1+Gc(s)Ga(s)Gp(s)Gm(s) = 0 (1.50)
1.6. Error en Estado Estacionario
La respuesta permanente es aquella que se alcanza cuando el sistema se establece y es muy importante su
estudio pues informa lo que sucede con la salida permanente una vez que el sistema es perturbado. Se pueden
tener casos en los cuales, ante una entrada acotada, no se logra un valor de establecimiento constante, siendo
éstas situaciones no deseadas, tal como sucede para la respuesta ante el escalón de los sistemas de tipo I.
En secciones anteriores se estudió el valor de establecimiento que alcanzaban distintos tipos de sistemas, en
tanto que en esta sección se estudiará la respuesta permanente desde el punto de vista del error del sistema
en estado estacionario, el cual solamente está definido para sistemas a lazo cerrado pues corresponde con la
diferencia entre la entrada o señal de referencia y la salida del sistema. La señal de referencia es el valor que la
salida está siguiendo y si fuese posible se desearía que la diferencia entre ellas fuese cero. Para un sistema con
retroalimentación unitaria, como el que se muestra en la Fig. 1.28, el error se expresa según la Ec. 1.51, en la
cual G(s) coincide con la función de transferencia a lazo abierto.
Figura 1.28: Sistema Retroalimentado
E(s) = R(s)−C(s)⇒ E(s) = R(s)−E(s)G(s)⇒ E(s) = R(s)(
11+G(s)
)(1.51)
Conocida la transformada de laplace del error es posible conocer el valor que alcanza el mismo cuando el tiempo
tiende a infinito utilizando el Teorema del valor final, tal como se hizo anteriormente,
ess = lı́mt→∞
e(t) = lı́ms→0
sE(s) = lı́ms→0
s[
R(s)(
11+G(s)
)](1.52)
Como puede apreciarse el error depende de la entrada a la cual sea sometido el sistema y de la función de
transferencia a lazo abierto. A continuación se calcularán los errores en estado estacionario o estado estable
para sistemas con diferentes funciones detransferencia a lazo abierto y para diferentes tipos de entrada.
29
1 Análisis de la Respuesta Temporal
1.6.1. Entrada Tipo Escalón
Ante una entrada tipo escalón de magnitud M, se calcula a continuación el error para distintos casos dependiendo
del tipo de la función de transferencia a lazo abierto.
ess = lı́ms→0
s[
Ms
(1
1+G(s)
)]= M
11+ lı́m
s→0G(s)
= M(
11+Kp
)(1.53)
donde Kp se conoce como el coeficiente estático de error de posición y su valor dependerá del tipo de la función
de transferencia a lazo abierto. Tomando la expresión general para G(s) que se mostró en la Ec. 1.54, el cálculo
de Kp y del error será como sigue.
G(s) =K (τ1s+1)(τ2s+1) · · · · · ·sN (τ3s+1)(τ4s+1) · · · · · ·
(1.54)
Tipo de G(s) lı́ms→0
G(s) = Kp ess
0 (N = 0) K M( 1
1+K
)I (N = 1) ∞ 0
II (N = 2) ∞ 0
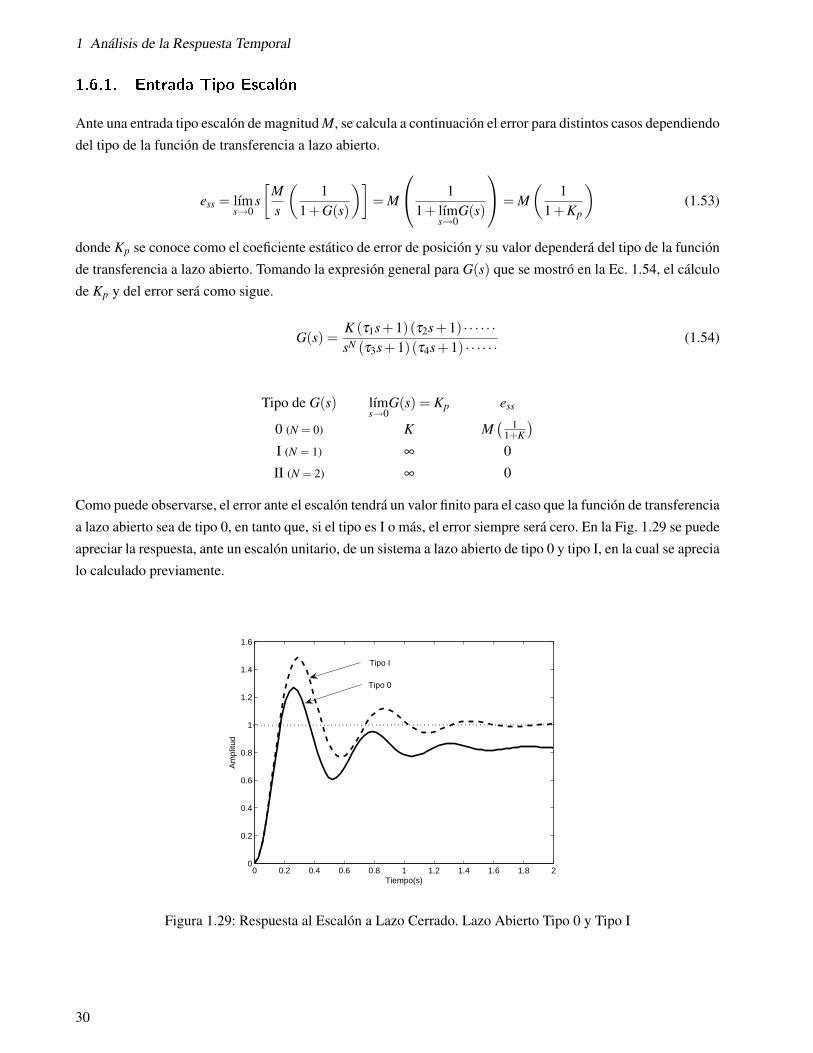
Como puede observarse, el error ante el escalón tendrá un valor finito para el caso que la función de transferencia
a lazo abierto sea de tipo 0, en tanto que, si el tipo es I o más, el error siempre será cero. En la Fig. 1.29 se puede
apreciar la respuesta, ante un escalón unitario, de un sistema a lazo abierto de tipo 0 y tipo I, en la cual se aprecia
lo calculado previamente.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Tiempo(s)
Am
plitu
d
Tipo I
Tipo 0
Figura 1.29: Respuesta al Escalón a Lazo Cerrado. Lazo Abierto Tipo 0 y Tipo I
30

1.6 Error en Estado Estacionario
1.6.2. Entrada Tipo Rampa
Ante una entrada tipo rampa cuya pendiente sea M, se calcula a continuación el error para distintos casos
dependiendo del tipo de la función de transferencia a lazo abierto.
ess = lı́ms→0
s[
Ms2
(1
1+G(s)
)]= M
1lı́ms→0
sG(s)
= M(
1Kv
)(1.55)
donde Kv se conoce como el coeficiente estático de error de velocidad y su valor dependerá del tipo de la función
de transferencia a lazo abierto, tal como se muestra a continuación. Tomando la misma expresión general para
G(s) que se mostró en la Ec. 1.54, el cálculo de Kv y del error será como sigue.
Tipo de G(s) lı́ms→0
sG(s) = Kv ess
0 (N = 0) 0 ∞
I (N = 1) K M( 1
K
)II (N = 2) ∞ 0
Como puede observarse, el error ante la rampa tendrá un valor infinito para el caso que la función de transfer-
encia a lazo abierto sea de tipo 0, para tipo I el error será finito, en tanto que para tipo II o más el error siempre
será cero. En la Fig. 1.30 se puede apreciar la respuesta, ante una rampa unitaria, para tres sistemas que a lazo
abierto son de tipo 0, de tipo I y de tipo II, en la cual se aprecia lo calculado previamente.
Figura 1.30: Respuesta a la Rampa a Lazo Cerrado. Lazo Abierto Tipo 0, Tipo I y Tipo II
1.6.3. Entrada Tipo Parábola
Ante una entrada tipo parábola, se calcula a continuación el error para distintos casos dependiendo del tipo de
la función de transferencia a lazo abierto.
ess = lı́ms→0
s[
Ms3
(1
1+G(s)
)]= M
1lı́ms→0
s2G(s)
= M(
1Ka
)(1.56)
donde Ka se conoce como el coeficiente estático de error de aceleración y su valor dependerá del tipo de la
función de transferencia a lazo abierto, tal como se muestra a continuación. Tomando la misma expresión general
para G(s) que se mostró en la Ec. 1.54, el cálculo de Ka y del error será como sigue.
31

1 Análisis de la Respuesta Temporal
Tipo de G(s) lı́ms→0
s2G(s) = KV ess
0 (N = 0) 0 ∞
I (N = 1) 0 ∞
II (N = 2) K M( 1
K
)Como puede observarse, el error ante la parábola tendrá un valor infinito para el caso que la función de trans-
ferencia a lazo abierto sea de tipo 0 y de tipo I, en tanto que para tipo II el error será finito y para sistemas de
tipo III o más el error será cero.
Finalmente, en la Tabla 1.2 se resume el cálculo de error para diferentes entradas y tipos de sistemas a lazo
abierto.
Tipo de G(s)/R(s) Escalón Rampa Parábola
0(
11+Kp
)∞ ∞
I 0(
1Kv
)∞
II 0 0(
1Ka
)Cuadro 1.2: Error a la Referencia
Ejemplo
Para un sistema de control como el que se mostró en la Fig. 1.28 y cuya función de transferencia a lazo abierto,G(s), se describe a continuación, calcule el error a la referencia R(s). Suponga que dicha referencia puede serun escalón, una rampa y una parábola, todas unitarias.
a) G(s)= 3s+46s3+5s2+2s+8
b) G(s)= 5s+106s3+8s2+7s
c) G(s)= 3s+4(6s+6)s2
Solucióna) La función de transferencia a lazo abierto es de tipo 0 pues no presenta ningún polo en el origen, es por elloque el error al escalón será finito, en tanto que el error ante la rampa y ante la parábola serán infinitos, talcomo se muestra a continuación.
Error al escalón
ess = lı́ms→0
s
[1s
(1
1+ 3s+46s3+5s2+2s+8
)]=
1
1+ lı́ms→0
(3s+4
6s3+5s2+2s+8
)=
(1
1+ 48
)=
46
= 0,66
Error a la rampa
32

1.6 Error en Estado Estacionario
ess = lı́ms→0
s
[1s2
(1
1+ 3s+46s3+5s2+2s+8
)]= 1
1
lı́ms→0
s(
3s+46s3+5s2+2s+8
)=
(10
)= ∞
Error a la parábola
ess = lı́ms→0
s
[1s3
(1
1+ 3s+46s3+5s2+2s+8
)]= 1
1
lı́ms→0
s2(
3s+46s3+5s2+2s+8
)=
(10
)= ∞
Como se observa, los errores calculados resultaron tal y como se mencionó con anterioridad, es decir, finito alescalón e infinitos a la rampa y a la parábola. En adelante solamente se calculará el error finito y aquellos quesean cero o infinito no serán calculados pues ya ha quedado ampliamente demostrado cada caso, tal como lodescribe la Tabla 1.2.
b) La función de transferencia a lazo abierto es de tipo I, por lo que el error al escalón será cero, a la rampaserá finito y a la parábola será infinito. A continuación se muestra el calculo del error a la rampa.
ess =(
1Kv
)=
1lı́ms→0 sG(s)
=
(1107
)= 0,7
c) La función de transferencia a lazo abierto es de tipo II, por lo que el error al escalón y a la rampa serán ceroy a la parábola será finito. A continuación se muestra el calculo del error a la parábola.
ess =(
1Ka
)=
1lı́ms→0 s2G(s)
=
(146
)= 1,5
33





























