Embed Size (px)
Citation preview

Мотор-редукторы \ Индустриальные редукторы \ Приводная электроника \ Приводная автоматизация \ Обслуживание
Руководство
Программный интерфейс MOVIVISION®
Руководство
FE320000
Издание 07/2005
11362766 / RU

SEW-EURODRIVE – Driving the world

Руководство – MOVIVISION® Программный интерфейс 3
Содержание
1 Важные указания............................................................................................. 4
2 Введение........................................................................................................... 6
3 Общее описание интерфейса ввода-вывода ............................................ 8
3.1 Интерфейс ввода-вывода: Информация о состоянии ......................... 8
3.2 Интерфейс ввода-вывода: Команды ................................................... 13
4 Шинная система / Сети................................................................................. 17
4.1 PROFIBUS DP........................................................................................ 17
4.2 Modbus/TCP ........................................................................................... 19
4.3 UDP/IP .................................................................................................... 21
5 Система управления осями......................................................................... 23
5.1 Система управления осями: Общие настройки.................................. 25
5.2 Осевая группа ERB (секция роликового конвейера) .......................... 27
5.3 Осевая группа 2POS (выход в два положения) .................................. 32
5.4 Осевая группа 3POS (выход в три положения) .................................. 34
5.5 Осевая группа XPOS............................................................................. 36
6 Алфавитный указатель................................................................................ 39
Центры поставки запасных частей и технические офисы.................... 41

1
4 Руководство – MOVIVISION® Программный интерфейс
Важные указания
Руководство
1 Важные указания
Указания по технике безопасности и предупреждения
Обязательно соблюдайте следующие указания по технике безопасности
и предупреждения!
Строгое соблюдение инструкции по эксплуатации является условием:
• безотказной работы устройства;
• выполнения возможных гарантийных требований.
Поэтому прежде чем начать установку программы параметрирования
и диагностики MOVIVISION®, прочтите инструкции по эксплуатации соответ-
ствующих компонентов.
Опасность!
Указывает на потенциальную опасность, способную привести к тяжелым или
смертельным травмам.
Внимание!
Указывает на потенциальную опасность, которая при работе с данным изделием
без должных мер предосторожности способна привести к достаточно серьезным
и даже смертельным травмам или к повреждению оборудования.
Осторожно!
Указывает на потенциально опасную ситуацию, способную привести
к повреждению данного устройства или оборудования.
Примечание
Содержит рекомендации, например, по вводу в эксплуатацию, и прочую полезную
информацию.
Дополнительная документация
Ссылка на необходимую документацию, например: инструкция по эксплуатации,
каталог, технический паспорт.

Руководство – MOVIVISION® Программный интерфейс 5
1Важные указания
Условия эксплуатации
Если не предусмотрены специальные меры, запрещено применение:
Утилизация Соблюдайте действующие предписания: выполняйте утилизацию в соответствии
с видом материала и действующими нормативами, например:
• компоненты электроники (печатные платы);
• пластмасса (корпуса);
• листовой металл;
• медь
и т. д.
• во взрывоопасной среде;
• в средах с вредными маслами, кислотами, газами, парами, пылью, радиацией
и т. д.;
• в нестационарных установках, которые не отвечают требованиям нормы
EN 50178 по механическим колебаниям и ударным нагрузкам.

2
6 Руководство – MOVIVISION® Программный интерфейс
Введение
2 Введение
Система MOVIVISION® состоит в основном из децентрализованных компонентов
SEW и центрального программного обеспечения (ПО) параметрирования
и диагностики. Поскольку возможна интеграция различных децентрализованных
компонентов (например, MOVIPRO® или MOVIFIT®), в данном Руководстве вместо
конкретного наименования используется общий термин "децентрализованный
компонент" или "устройство".
"Программный интерфейс MOVIVISION®" – это программное средство контроля
обмена данными между децентрализованным компонентом и контроллером
верхнего уровня (ПЛК). Необходимые настройки осуществляются с помощью
программы параметрирования и диагностики MOVIVISION®.
30013AXX
Рис. 1. Графическое изображение программного интерфейса MOVIVISION®
[a] Контроллер верхнего уровня[b] Сетевая шина[c] Программный интерфейс
MOVIVISION®
[d] Уровень привода[e] Уровень оси[f] Уровень TecUnit
(технологии)
[g] Частота вращения[h] Время[i] Датчики[j] Приводы
[b]
[c]
[a]
010010110
[d]
[e]
[f]
[g]
[h]
[i]
[j]

Руководство – MOVIVISION® Программный интерфейс 7
2Введение
В программном обеспечении MOVIVISION® предусмотрены разные состояния
и команды для устройств и для подключенных приводов.
В программе параметрирования и диагностики MOVIVISION® для каждого
привода можно настроить интеллектуальные функции (оси), при этом
децентрализованные компоненты получают возможность самостоятельного
позиционирования с помощью модулей ввода-вывода, датчиков и т. п.
Специальные варианты применения можно реализовать с помощью специальных
функций (TecUnit). В этом случае состояния и команды, действительные для
функций TecUnit, описываются в соответствующих руководствах TecUnit.
Подключенным приводом можно управлять следующими способами:
• задание уставки частоты вращения (уровень привода) ИЛИ
• задание конечного положения или функции (уровень оси) ИЛИ
• запрос специальной функции, способной управлять целыми агрегатами
(уровень TecUnit).

3
8 Руководство – MOVIVISION® Программный интерфейс
Интерфейс ввода-вывода: Информация о состоянии
Общее описание интерфейса ввода-вывода
3 Общее описание интерфейса ввода-вывода
3.1 Интерфейс ввода-вывода: Информация о состоянии
Информация о состоянии – это данные, которые децентрализованный компонент
сообщает центральному контроллеру.
• Если бит "Готов к работе" в регистре "Состояние" не установлен, проверьте бит
"Имеется ошибка".
• Если этот бит установлен, то ошибка имеется и подлежит исправлению.
• Если этот бит сброшен, то ошибка имела место и ее нужно квитировать.
В случае ошибки информация о ней заносится в соответствующий регистр
ошибок. После квитирования неисправности устанавливается бит "Готов
к работе", а запись в регистре ошибок удаляется.
При наличии одной ошибки все устройство переходит в режим неисправности или
останова. Например, если об ошибке сообщает какой-либо осевой модуль,
то система останавливает и все остальные оси или приводы, даже если они
не сообщают об ошибках.
3.1.1 Интерфейс ввода-вывода: Общее состояние
В этот байт записывается общая информация о состоянии устройства.
Примечание
Общие регистры состояния
• устройства,
• функции Tec-Unit,
• осей,
• приводов
обрабатываются по одинаковой схеме.
Бит Имя Описание
0 Готов к работе 0: Устройство не готово к работе1: Устройство готово к работе
1 Имеется ошибка 0: Нет ошибок1: Имеется ошибка
2 Ручной / автоматический режим 0: Ручной режим1: Автоматический режим
3 Резервный 0
4 Требуется загрузка параметров 0: Загрузка параметров не требуется1: Загрузка параметров требуется
5 Приоритет обработки 0: Приоритет обработки за ПЛК-программой1: Приоритет обработки за ПК-приложением (MOVIVISION®)
6 Разрешение 0: Устройство заблокировано1: Устройство разблокировано
7 Признак активности Ответ; устанавливается значение, равное заданному ведущим в байте "Общая команда".

Руководство – MOVIVISION® Программный интерфейс 9
3Интерфейс ввода-вывода: Информация о состоянии
Общее описание интерфейса ввода-вывода
3.1.2 Интерфейс ввода-вывода: Общие данные об ошибке
Сюда записывается информация о последней ошибке. Если одновременно
активны несколько ошибок, то указывается ошибка с наивысшим приоритетом.
3.1.3 Интерфейс ввода-вывода: Состояние уровня управления
Эта информация определяет, на каком уровне осуществляется управление
приводами.
3.1.4 Интерфейс ввода-вывода: Состояние Tec-Unit
Это слово содержит общую информацию о состоянии при управлении
на уровне Tec-Unit.
Бит Имя Описание
0...7 Последняя ошибка Значение 0: Нет ошибок Значение 1: Сервисный выключатель ВЫКЛ Значение 2: Нет коммутируемого питания 24 ВЗначение 3: Ошибка "Неверная команда"Значение 4: Ошибка "Tec-Unit"Значение 5: Ошибка "Ось"Значение 6: Ошибка "Привод"Значение 7: Ошибка "Локальная шина"Значение 8: Ошибка "Внутренний модуль"Значение 9: Ошибка "Нет связи с сетевой шиной"Значение 10: Ошибка "Цепь аварийной защиты"Значение 11: Ошибка "Требуется загрузка параметров"Значение 12: Ошибка "Загрузка активна"Значение 13: Ошибка "Встроенное ПО"Значения 14-254: РезервныеЗначение 255: Другая ошибка
Бит Имя Описание
0 Привод 1, уровень оси 0: Управление приводом 1 – не на уровне оси1: Управление приводом 1 – на уровне оси
1 Привод 2, уровень оси 0: Управление приводом 2 – не на уровне оси1: Управление приводом 2 – на уровне оси
2 Привод 3, уровень оси 0: Управление приводом 3 – не на уровне оси1: Управление приводом 3 – на уровне оси
3 Привод 4, уровень оси 0: Управление приводом 4 – не на уровне оси1: Управление приводом 4 – на уровне оси
4 Привод 5, уровень оси 0: Управление приводом 5 – не на уровне оси1: Управление приводом 5 – на уровне оси
5 Привод 6, уровень оси 0: Управление приводом 6 – не на уровне оси1: Управление приводом 6 – на уровне оси
6 Резервный 0
7 Привод 1...n, уровень Tec-Unit
0: Управление приводами – не на уровне Tec-Unit1: Управление приводами 1...n – на уровне Tec-Unit
Бит Имя Описание
0 Готов к работе 0: Функция Tec-Unit не готова к работе1: Функция Tec-Unit готова к работе
1 Имеется ошибка 0: Нет ошибок1: Имеется ошибка
2...15 В зависимостиот Tec-Unit
Значение битов 2...15 зависит от используемой функции Tec-Unit и описывается в руководстве к соответствующему прикладному ПО.

3
10 Руководство – MOVIVISION® Программный интерфейс
Интерфейс ввода-вывода: Информация о состоянии
Общее описание интерфейса ввода-вывода
3.1.5 Интерфейс ввода-вывода: Ошибка Tec-Unit
Сюда записывается информация о последней ошибке. Если одновременно
активны несколько ошибок, то указывается ошибка с наивысшим приоритетом.
3.1.6 Интерфейс ввода-вывода: Состояние 2 Tec-Unit
В зависимости от функции Tec-Unit это слово содержит дополнительную
информацию о состоянии и описывается в руководстве к соответствующему ПО.
3.1.7 Интерфейс ввода-вывода: Состояние оси
Это слово содержит информацию о состоянии соответствующей оси.
Бит Имя Описание
0...7 Последняя ошибка Значение 0: Нет ошибокЗначение 1-255: Индивидуальная ошибка Tec-Unit, описанная в руководстве к соответствующему прикладному ПО.
8...15 Резервные 0
Примечание
Состояния Tec-Unit обрабатываются только в том случае, если управление
соответствующим приводом осуществляется на уровне Tec-Unit.
Бит Имя Описание
0 Готов к работе 0: Ось не готова к работе1: Ось готова к работе
1 Имеется ошибка 0: Нет ошибок1: Имеется ошибка
2 Требуется выход в 0-позицию 0: Выход в 0-позицию не требуется1: Выход в 0-позицию требуется
3 Выход в 0-позицию активен 0: Выход в 0-позицию не активен1: Выход в 0-позицию активен
4 В промежуточном положении + 0: Не в промежуточном положении1: В промежуточном положении +Подробнее: см. гл. "Система управления осями"
5 В промежуточном положении – 0: Не в промежуточном положении1: В промежуточном положении –Подробнее: см. гл. "Система управления осями"
6 В положении 0: Не в положении1: В положении
7 Ось не активна 0: Ось активна1: Ось не активна
8...15 Текущее положение 0: В неверном положении 1: В положении 1...255: В положение 255Подробнее:см. гл. "Система управления осями"

Руководство – MOVIVISION® Программный интерфейс 11
3Интерфейс ввода-вывода: Информация о состоянии
Общее описание интерфейса ввода-вывода
3.1.8 Интерфейс ввода-вывода: Ошибка оси
Сюда записывается информация о последней ошибке. Если одновременно
активны несколько ошибок, то указывается ошибка с наивысшим приоритетом.
3.1.9 Интерфейс ввода-вывода: Состояние привода
Этот байт содержит информацию о состоянии соответствующего привода.
3.1.10 Интерфейс ввода-вывода: Ошибка привода
Сюда записывается информация о последней ошибке. Если одновременно
активны несколько ошибок, то указывается ошибка с наивысшим приоритетом.
Бит Имя Описание
0...7 Последняя ошибка Значение 0: Нет ошибокЗначение 1: Ошибка "Контроль последовательности"Значение 2: Ошибка "Контроль времени движения"Значение 3: Ошибка "Положение пропущено"Значение 4: Ошибка "Положение покинуто без команды" Значение 5: Ошибка "Неверная команда для оси" Значение 6: Ошибка "Неверное текущее положение" Значение 7: Ошибка "Энкодер" Значение 8-254: РезервныеЗначение 255: Другая ошибка
Примечание
Состояния оси обрабатываются только в том случае, если управление
соответствующим приводом осуществляется на уровне Tec-Unit или на уровне оси.
Бит Имя Описание
0 Готов к работе 0: Привод не готов к работе1: Привод готов к работе
1 Имеется ошибка 0: Нет ошибок1: Имеется ошибка
2 Двигатель работает 0: Частота двигателя = 01: Частота двигателя <> 0
3 Уставка частоты достигнута 0: Заданная частота не достигнута1: Заданная частота достигнута
4 Тормоз отпущен 0: Тормоз наложен1: Тормоз отпущен
5 Разблокировка регулятора 0: Регулятор заблокирован1: Регулятор разблокирован
6 Резервный 0
7 Привод не активен 0: Привод активен1: Привод не активен
Бит Имя Описание
0...7 Последняя ошибка Значение 0: Нет ошибокЗначение 1: Ошибка "Неверная команда"Значение 2: Ошибка "Избыточный ток"Значение 3: Ошибка "Перегрев"Значение 4: Ошибка "Нет связи с преобразователем частоты"Значение 5: Ошибка "Неверная настройка потенциометра F
max"
Значение 6: Ошибка "Неверное назначение клеммы f1/f2"Значение 7: Ошибка "Нет напряжения электросети"Значение 8: Ошибка "Внутренняя ошибка преобразователя"Значение 9: Ошибка "Инициализация"Значение 10-254: РезервныеЗначение 255: Другая ошибка

3
12 Руководство – MOVIVISION® Программный интерфейс
Интерфейс ввода-вывода: Информация о состоянии
Общее описание интерфейса ввода-вывода
3.1.11 Интерфейс ввода-вывода: Состояние цепи аварийной защиты
Этот байт содержит информацию о состоянии соответствующей цепи аварийной
защиты.
3.1.12 Интерфейс ввода-вывода: Локальные входы
Состояние локальных входов устройства. В зависимости от подключенной сети
данные передаются в двух байтах (PROFIBUS) или в одном регистре/слове
(Modbus/TCP).
3.1.13 Интерфейс ввода-вывода: Входы модулей ввода-вывода
Для каждого модуля ввода-вывода предусмотрены один байт входных и один байт
выходных данных. Количество входов зависит от подключенного модуля ввода-
вывода.
Бит Имя Описание
0 Цепь АЗ замкнута 0: Цепь аварийной защиты разомкнута1: Цепь аварийной защиты замкнута
1 Крайнее переднее положение достигнуто
0: Крайнее переднее положение не достигнуто1: Крайнее переднее положение достигнуто
2 Крайнее заднее положение достигнуто
0: Крайнее заднее положение не достигнуто1: Крайнее заднее положение достигнуто
3 Реле цепи АЗ активно 0: Реле блокировки цепи АЗ не активно1: Реле блокировки цепи АЗ активно
4 Резервный 0
5 Резервный 0
6 Резервный 0
7 Резервный 0
Бит Имя Описание
0...7 Входы 0...7 0: На входе нет сигнала1: На входе есть сигнал
8...15 Входы 8...15
Бит Имя Описание
0...7 Входы 0...7 0: На входе нет сигнала1: На входе есть сигнал

Руководство – MOVIVISION® Программный интерфейс 13
3Интерфейс ввода-вывода: Команды
Общее описание интерфейса ввода-вывода
3.2 Интерфейс ввода-вывода: Команды
Команды – это информация, которую контроллер верхнего уровня передает
на устройство.
3.2.1 Интерфейс ввода-вывода: Общая команда
Этот байт содержит общие командные биты для управления
децентрализованным компонентом.
3.2.2 Интерфейс ввода-вывода: Команда для уровня управления
Этот байт определяет, на каком уровне осуществляется управление приводами.
Бит Имя Описание
0 Квитировать ошибку 0: Нет квитирования 1: Квитируется последняя ошибка
1 Резервный
2 Ручной / автоматический режим (при управлении через команды для TecUnit или оси)
0: Ручной режим1: Автоматический режим
3 Резервный
4 Резервный
5 Приоритет обработки 0: Изменение приоритета обработки запрещено1: Изменение приоритета обработки разрешено
6 Разрешение 0: Заблокировать устройство1: Разблокировать устройство
7 Признак активности Запрос; ведущий задает значение, которое контроллер записывает в байт "Общее состояние“.
Бит Имя Описание
0 Привод 1, уровень оси 0: Управление приводом 1 – не на уровне оси1: Управление приводом 1 – на уровне оси
1 Привод 2, уровень оси 0: Управление приводом 2 – не на уровне оси1: Управление приводом 2 – на уровне оси
2 Привод 3, уровень оси 0: Управление приводом 3 – не на уровне оси1: Управление приводом 3 – на уровне оси
3 Привод 4, уровень оси 0: Управление приводом 4 – не на уровне оси1: Управление приводом 4 – на уровне оси
4 Привод 5, уровень оси 0: Управление приводом 5 – не на уровне оси1: Управление приводом 5 – на уровне оси
5 Привод 6, уровень оси 0: Управление приводом 6 – не на уровне оси1: Управление приводом 6 – на уровне оси
6 Резервный
7 Привод 1...n, уровень Tec-Unit 0: Управление приводами – не на уровне Tec-Unit1: Управление приводами – на уровне Tec-Unit
Примечание
Бит 7 для активации управления на уровне Tec-Unit имеет наивысший приоритет.
Если этот бит установлен, устройство игнорирует биты 0...5.

3
14 Руководство – MOVIVISION® Программный интерфейс
Интерфейс ввода-вывода: Команды
Общее описание интерфейса ввода-вывода
3.2.3 Интерфейс ввода-вывода: Команда 1...3 для Tec-Unit
Эти слова содержат команды для управления на уровне Tec-Unit.
При использовании функций Tec-Unit назначение битов см. в руководстве
к соответствующему прикладному ПО.
3.2.4 Интерфейс ввода-вывода: Команда для оси
Этот байт содержит общие командные биты для управления осями 1...n.
Примечание
Команды для Tec-Unit обрабатываются только в том случае, если управление
соответствующим приводом осуществляется на уровне Tec-Unit.
Бит Имя Описание
0 Разрешение на выход в 0-позицию (только ось XPos)
0: Выход в 0-позицию запрещен1: Выход в 0-позицию разрешен
1 Наладка вперед 0: Нет режима наладки в прямом направлении1: Режим наладки в прямом направлении
2 Наладка назад 0: Нет режима наладки в обратном направлении1: Режим наладки в обратном направлении
3 Резервный
4 Резервный
5 Резервный
6 Резервный
7 Резервный
8...15 Двигаться в положение 1...255 0: Не двигаться в положение1: Двигаться в положение 12: Двигаться в положение 2...255: Двигаться в положение 255Подробнее:см. гл. "Система управления осями"
Примечание
Команда для оси обрабатывается только в том случае, если управление
соответствующим приводом осуществляется на уровне оси.

Руководство – MOVIVISION® Программный интерфейс 15
3Интерфейс ввода-вывода: Команды
Общее описание интерфейса ввода-вывода
3.2.5 Интерфейс ввода-вывода: Команда для привода
Этот байт содержит общие командные биты для управления приводами 1...n.
3.2.6 Интерфейс ввода-вывода: Локальные выходы
Этот байт используется для управления локальными выходами устройства.
3.2.7 Интерфейс ввода-вывода: Выходы модулей ввода-вывода
Для каждого модуля ввода-вывода предусмотрены один байт входных и один байт
выходных данных. Количество выходов зависит от подключенного модуля ввода-
вывода.
Бит Имя Описание
0...3 Команда 0: СТОП1: Двигаться с фикс.частотой вращения 12: Двигаться с фикс.частотой вращения 23: Двигаться с фикс.частотой вращения 34: Двигаться с фикс.частотой вращения 45: Двигаться с фикс.частотой вращения 56: Двигаться с фикс.частотой вращения 67: Двигаться с заданной уставкой (биполярной)8: Отпустить тормоз9 -14: Резервные 15: Выйти из крайнего положения
4...5 Набор значений темпа 0: Набор значений темпа 0 / Темп быстрой остановки1: Набор значений темпа 12: Набор значений темпа 23: Набор значений темпа 3
6 Направление вращения(только с фикс. уставками)
0: Направление вращения – вперед1: Направление вращения – назад
7 Набор параметров 0: Набор параметров 11: Набор параметров 2
Примечание
Команда для привода обрабатывается только в том случае, если управление
соответствующим приводом осуществляется на уровне привода.
Бит Имя Описание
0...3 Выходы 0...3 0: Сбросить сигнал на выходе1: Установить сигнал на выходе
4...7 Резервные
Примечание
Считывать сигналы выходов можно через локальные входы 0...3. Если сигнал
на выходе установлен, но это не подтверждается через вход, то имеется короткое
замыкание.
Бит Имя Описание
0...7 Выходы 0...7 0: Сбросить сигнал на выходе1: Установить сигнал на выходе

3
16 Руководство – MOVIVISION® Программный интерфейс
Интерфейс ввода-вывода: Команды
Общее описание интерфейса ввода-вывода
3.2.8 Интерфейс ввода-вывода: Задание уставки для привода
Если скорость привода задается уставкой, система реагирует следующим
образом:
• Уставка записывается в соответствующее выходное слово.
• Активируется команда "Двигаться с заданной уставкой".
• Выбирается направление вращения и набор значений темпа.
Значение, записываемое в качестве уставки, соответствует уставке в % от nmax,
умноженной на 100.
Пример Введенная уставка: Значение уставки в выходном слове:
68,4 % nmax 6840

Руководство – MOVIVISION® Программный интерфейс 17
4PROFIBUS DP
Шинная система / Сети
4 Шинная система / Сети
Децентрализованные компоненты управляются центральным контроллером.
Обмен данными осуществляется через шинные системы (например, PROFIBUS)
или сетевые системы (например, Modbus/TCP на базе Ethernet или WLAN).
В данной главе описываются особенности отдельных шинных/сетевых
интерфейсов.
4.1 PROFIBUS DP
Устройство поддерживает протокол PROFIBUS DPV1 (внутр. PROFIBUS PE).
В основе этого протокола – версия PROFIBUS DP (по стандарту EN 50170) для
быстрого циклического обмена данными. Кроме того, он предусматривает
ациклические функции "Считать блок данных" или "Записать блок данных".
Управление устройством с помощью ПЛК осуществляется только по протоколу
PROFIBUS DP, а DPV1-функции используются только программой пара-
метрирования и диагностики MOVIVISION®. Чтобы такой параллельный доступ
с ПЛК и ПК был возможен, ПЛК должен поддерживать многомастерный режим
(несколько ведущих).
4.1.1 PROFIBUS DP: Конфигурирование в программе DP-ведущего
PROFIBUS DP:
Подключение
GSD-файла
Для возможности конфигурирования устройства в программе DP-ведущего
необходимо сначала подключить прилагаемый GSD-файл SEW_077A.gsd (файл
основных данных устройств). Этот файл содержит все данные, необходимые для
конфигурирования соответствующего ведомого в программе DP-ведущего.
Например, в нем имеются поддерживаемые устройством параметры обмена
данными по шине. Однако особый интерес для пользователя представляет
область ввода-вывода в памяти устройства.
PROFIBUS DP:
Определение
области ввода-
вывода
Устройство позволяет самостоятельно составлять область ввода-вывода данных
для управления ведомым. При этом циклический обмен данными между ПЛК
и децентрализованным компонентом можно согласовать с нужным приложением.
При конфигурировании устройства ведомый предоставляет каталог с блоками
входных/выходных данных, через которые пользователь может составить
область ввода-вывода методом "Drag&Drop". Доступные блоки данных
перечислены в следующей таблице.
Примечание
Для PROFIBUS DP направление передачи данных (входные или выходные)
определяется всегда со стороны ПЛК.

4
18 Руководство – MOVIVISION® Программный интерфейс
PROFIBUS DP
Шинная система / Сети
PROFIBUS DP:
Входные данные
(устройство ->
контроллер)
PROFIBUS DP:
Выходные данные
(контроллер ->
устройство)
PROFIBUS DP:
Согласование
специальных
параметров
блока данных
В настоящее время устройство не поддерживает блоки данных специальной
конфигурации.
PROFIBUS DP:
Согласование
специальных
параметров
ведомого
Для специальных параметров ведомого в текущей версии установлены
следующие фиксированные значения:
Блок данных Размер Описание см. в главе
Общее состояние Байт "Интерфейс ввода-вывода: Общее состояние"
Общие данные об ошибке Байт "Интерфейс ввода-вывода: Общие данные об ошибке"
Состояние уровня управления Байт "Интерфейс ввода-вывода: Состояние уровня управления"
Состояние Tec-Unit Слово "Интерфейс ввода-вывода: Состояние Tec-Unit"
Ошибка Tec-Unit Слово "Интерфейс ввода-вывода: Ошибка Tec-Unit"
Состояние 2 Tec-Unit Слово "Интерфейс ввода-вывода: Состояние 2 Tec-Unit"
Состояние оси 1...6 Слово "Интерфейс ввода-вывода: Состояние оси"
Ошибка оси 1...6 Байт "Интерфейс ввода-вывода: Ошибка оси"
Состояние привода 1...6 Байт "Интерфейс ввода-вывода: Состояние привода"
Ошибка привода 1...6 Байт "Интерфейс ввода-вывода: Ошибка привода"
Состояние цепи аварийной защиты 1...2 Байт "Интерфейс ввода-вывода: Состояние цепи аварийной защиты"
Локальные входы 1...2 Байт "Интерфейс ввода-вывода: Локальные входы"
Входы модулей ввода-вывода 1...4 Байт "Интерфейс ввода-вывода: Входы модулей ввода-вывода"
Блок данных Размер Описание см. в главе
Общая команда Байт "Интерфейс ввода-вывода: Общая команда"
Команда для уровня управления Байт "Интерфейс ввода-вывода: Команда для уровня управления"
Команда 1...3 для Tec-Unit Слово "Интерфейс ввода-вывода: Команда 1...3 для Tec-Unit"
Команда для оси 1...6 Слово "Интерфейс ввода-вывода: Команда для оси"
Команда для привода 1...6 Байт "Интерфейс ввода-вывода: Команда для привода"
Локальные выходы Байт "Интерфейс ввода-вывода: Локальные выходы"
Выходы модулей ввода-вывода 1...4 Байт "Интерфейс ввода-вывода: Выходы модулей ввода-вывода"
Задание уставки для привода 1...6 Слово "Интерфейс ввода-вывода: Задание уставки для привода"
Внимание
При обмене данными через PROFIBUS DP блоки данных "Общее состояние"
и "Общая команда" должны находиться на первых местах в области ввода
и вывода соответственно.
Байт Параметр Диапазон значений
0 DPV_1_Status_1 128d (80hex)
1 DPV_1_Status_2 0
2 DPV_1_Status_3 0
Внимание
Специальные параметры ведомого изменению не подлежат!

Руководство – MOVIVISION® Программный интерфейс 19
4Modbus/TCP
Шинная система / Сети
4.2 Modbus/TCP
Интерфейс Modbus/TCP определяет протокольный блок данных, передаваемый
через стандартное соединение TCP/IP, например на базе Ethernet или WLAN.
Спецификацию протокола, предоставляемую организацией Modbus, можно
загрузить через Интернет с веб-сайта www.modbus.org.
4.2.1 Modbus/TCP: Определение области ввода-вывода
Modbus/TCP:
Стандартная
область ввода/
вывода
Через интерфейс Modbus/TCP устройство предоставляет фиксированную
область памяти ввода/вывода, где ведущий может считывать и записывать любые
взаимосвязанные блоки данных.
Modbus/TCP:
Входные данные
(устройство ->
контроллер)
Modbus/TCP:
Выходные
данные
(контроллер ->
устройство)
Modbus/TCP:
Прикладная
область ввода/
вывода
Кроме стандартной области ввода-вывода устройство в зависимости
от приложения предоставляет дополнительные блоки регистров для обмена
данными. Это пространство ввода-вывода описано в руководстве
к соответствующему прикладному ПО.
Блок данных Регистр Размер Описание см. в главе
Общее состояние 201 Байт "Интерфейс ввода-вывода: Общее состояние"
Общие данные об ошибке 202 Байт "Интерфейс ввода-вывода: Общие данные об ошибке"
Состояние уровня управления
203 Байт "Интерфейс ввода-вывода: Состояние уровня управления"
Состояние Tec-Unit 204 Слово "Интерфейс ввода-вывода: Состояние Tec-Unit"
Ошибка Tec-Unit 205 Слово "Интерфейс ввода-вывода: Ошибка Tec-Unit"
Состояние 2 Tec-Unit 206 Слово "Интерфейс ввода-вывода: Состояние 2 Tec-Unit"
Состояние оси 1...6 207-212 Слово "Интерфейс ввода-вывода: Состояние оси"
Ошибка оси 1...6 213-218 Байт "Интерфейс ввода-вывода: Ошибка оси"
Состояние привода 1...6 219-224 Байт "Интерфейс ввода-вывода: Состояние привода"
Ошибка привода 1...6 225-230 Байт "Интерфейс ввода-вывода: Ошибка привода"
Состояние цепи аварийной защиты 1...2
231-232 Байт "Интерфейс ввода-вывода: Состояние цепи аварийной защиты"
Локальные входы 1...2 233-234 Байт "Интерфейс ввода-вывода: Локальные входы"
Входы модулей ввода-вывода 1...4
235-238 Байт "Интерфейс ввода-вывода: Входы модулей ввода-вывода"
Блок данных Регистр Размер Описание см. в главе
Общая команда 1 Байт "Интерфейс ввода-вывода: Общая команда"
Команда для уровня управления
2 Байт "Интерфейс ввода-вывода: Команда для уровня управления"
Команда 1...3 для Tec-Unit 3-5 Слово "Интерфейс ввода-вывода: Команда 1...3 для Tec-Unit"
Команда для оси 1...6 6-11 Слово "Интерфейс ввода-вывода: Команда для оси"
Команда для привода 1...6 12-17 Байт "Интерфейс ввода-вывода: Команда для привода"
Локальные выходы 18 Байт "Интерфейс ввода-вывода: Локальные выходы"
Выходы модулей ввода-вывода 1...4
19-22 Байт "Интерфейс ввода-вывода: Выходы модулей ввода-вывода"
Задание уставки для привода 1...6
23-28 Слово "Интерфейс ввода-вывода: Задание уставки для привода"

4
20 Руководство – MOVIVISION® Программный интерфейс
Modbus/TCP
Шинная система / Сети
4.2.2 Modbus/TCP: Функции доступа
Доступ к области памяти ввода/вывода осуществляется через регистры. Регистр
состоит из одного слова, т. е. из двух байтов. Для блоков данных размером
в только один байт передается тоже целый регистр, но его старший байт
не используется (значение 0), а данные занимают только младший байт.
Функции кодируются следующим образом:
* Шестнадцатеричный код функции
Код Имя Описание
03h* FC03: READ_MULTIPLE_REGISTERS Считывание регистров
10h* FC16: WRITE_MULTIPLE_REGISTERS Запись регистров
17h* FC23: READ_WRITE_MULTIPLE_REGISTERS Считывание и запись регистров

Руководство – MOVIVISION® Программный интерфейс 21
4UDP/IP
Шинная система / Сети
4.3 UDP/IP
Интерфейс UDP определяет протокольный блок данных, передаваемый через
стандартное соединение UDP/IP, например на базе Ethernet или WLAN.
4.3.1 UDP/IP: Определение области ввода-вывода
UDP/IP: Стандартная область ввода/вывода
Через интерфейс UDP/IP устройство предоставляет фиксированную область
памяти ввода/вывода. Ведущий отправляет определенное количество слов,
начиная с "Общей команды" и заканчивая последним нужным ему словом. Все
остальные слова обнуляются. Устройство отвечает всегда полным набором
входных данных.
UDP/IP: Входные
данные
(устройство ->
контроллер)
UDP/IP:
Выходные
данные
(контроллер ->
устройство)
Блок данных Адр.слова Размер Описание см. в главе
Общее состояние 0 Байт "Интерфейс ввода-вывода: Общее состояние"
Общие данные об ошибке 1 Байт "Интерфейс ввода-вывода: Общие данные об ошибке"
Состояние уровня управления
2 Байт "Интерфейс ввода-вывода: Состояние уровня управления"
Состояние Tec-Unit 3 Слово "Интерфейс ввода-вывода: Состояние Tec-Unit"
Ошибка Tec-Unit 4 Слово "Интерфейс ввода-вывода: Ошибка Tec-Unit"
Состояние 2 Tec-Unit 5 Слово "Интерфейс ввода-вывода: Состояние 2 Tec-Unit"
Состояние оси 1...6 6-11 Слово "Интерфейс ввода-вывода: Состояние оси"
Ошибка оси 1...6 12-17 Байт "Интерфейс ввода-вывода: Ошибка оси"
Состояние привода 1...6 18-23 Байт "Интерфейс ввода-вывода: Состояние привода"
Ошибка привода 1...6 24-29 Байт "Интерфейс ввода-вывода: Ошибка привода"
Состояние цепи аварийной защиты 1...2
30-31 Байт "Интерфейс ввода-вывода: Состояние цепи аварийной защиты"
Локальные входы 1...2 32-33 Байт "Интерфейс ввода-вывода: Локальные входы"
Входы модулей ввода-вывода 1...4
34-37 Байт "Интерфейс ввода-вывода: Входы модулей ввода-вывода"
Блок данных Адр.слова Размер Описание см. в главе
Общая команда 0 Байт "Интерфейс ввода-вывода: Общая команда"
Команда для уровня управления
1 Байт "Интерфейс ввода-вывода: Команда для уровня управления"
Команда 1...3 для Tec-Unit 2-4 Слово "Интерфейс ввода-вывода: Команда 1...3 для Tec-Unit"
Команда для оси 1...6 5-10 Слово "Интерфейс ввода-вывода: Команда для оси"
Команда для привода 1...6 11-16 Байт "Интерфейс ввода-вывода: Команда для привода"
Локальные выходы 17 Байт "Интерфейс ввода-вывода: Локальные выходы"
Выходы модулей ввода-вывода 1...4
18-21 Байт "Интерфейс ввода-вывода: Выходы модулей ввода-вывода"
Задание уставки для привода 1...6
22-27 Слово "Интерфейс ввода-вывода: Задание уставки для привода"
Примечание
Протокол UDP не определяет формат данных. Устройство отправляет/принимает
данные в формате INTEL (LSB/MSB).

4
22 Руководство – MOVIVISION® Программный интерфейс
UDP/IP
Шинная система / Сети
UDP/IP: Прикладная область ввода/вывода
Кроме стандартной области ввода-вывода устройство в зависимости
от приложения предоставляет дополнительное пространство ввода-вывода для
обмена данными. Это пространство ввода-вывода описано в руководстве
к соответствующему прикладному ПО.
UDP/IP: UDP-порты
Устройство остается пассивным до тех пор, пока другое устройство (ПЛК)
не отправит на его UDP-порт какие-либо UDP-сообщения. В этом случае
устройство посылает ответ на адрес порта удаленного узла, отправившего
сообщение данному устройству.
Значение Описание
6000 Локальный порт для обмена данными по протоколу UDP

Руководство – MOVIVISION® Программный интерфейс 23
5UDP/IP
Система управления осями
5 Система управления осями
По команде контроллера верхнего уровня устройство (а именно, его система
управления осями) самостоятельно выполняет позиционирование осей. При этом
система управления осями – в зависимости от исполнения аппаратной части –
использует сигналы различных датчиков, например:
• фотоячейки;
• индуктивные бесконтактные датчики (входы 24 В);
• энкодеры;
• лазерные дальномеры.
Кроме того, выполняются следующие задачи:
• контроль времени движения;
• контроль последовательности;
• проверка работы датчиков.
Функции системы управления осями настраиваются в ПК-приложении верхнего
уровня. При этом указываются и такие индивидуальные параметры как:
• назначение инициаторов (двоичных датчиков положения);
• время движения;
• положения.
Система управления осями объединяет различные типы осей в группы. Внутри
осевой группы используются сходные функции и варианты применения.
Внимание
Такие контрольные функции как:
• контроль времени движения;
• контроль последовательности;
• проверка работы датчиков
можно отключить. Но при этом реакция на входной сигнал об ошибке
не выполняется. В этом случае реакция на ошибку должна выполняться
контроллером верхнего уровня.

5
24 Руководство – MOVIVISION® Программный интерфейс
UDP/IP
Система управления осями
Терминология для системы управления осями
Примечание
В данной главе рассматриваются состояния осей, при этом используются
следующие сокращения:
• P В положении
• Z+ Промежуточное положение +
• Z– Промежуточное положение –
30012AXX
Рис. 2. Представление положения оси
[a] Направление движения[b] 3P[c] Участок перемещения
[d] 3Z–[e] 3Z+
2 Положение 23 Положение 34 Положение 4
[a][b]
[c][e]
2 3 4
[a]
[d]

Руководство – MOVIVISION® Программный интерфейс 25
5Система управления осями: Общие настройки
Система управления осями
5.1 Система управления осями: Общие настройки
Для конфигурации осей в зависимости от их типа настраиваются:
• инициаторы;
• время движения;
• фиксированная частота вращения,
которые обеспечивают согласование с приложением.
5.1.1 Система управления осями: Настройка инициаторов
Для каждого датчика можно настроить следующие параметры:
Система управления осями: Задержка включения / выключения
Реакция S1v на входной сигнал S1 выполняется только по истечении
установленной задержки включения tv. Реакция выполняется и в том случае, если
к моменту истечения времени tv сигнала больше нет. В этом случае длительность
сигнала реакции увеличивается на время задержки.
Задержка включения используется, например, для "плотного" наезда
на инициатор, выравнивания над инициатором и т. п.
При контроле сигналов ввода-вывода в ведущем устройстве и при отображении
в ПК-приложении верхнего уровня задержка включения не учитывается.
Функция Значения Описание
Источник E 0...E 15 Локальный вход 0...15
Фронт сигнала положит./отриц. Фронт сигнала (положительный или отрицательный), вызывающий реакцию.
Задержка включения 1...100 (x 10 мс) При появлении выбранного фронта сигнала активируется его внутренняя задержка на указанное время.
30001AXX
Рис. 3. Задержка включения / выключения
tv
S1v
S1
Sig.
tv tvtv t
Примечание
Если задержка включения активна, то в зависимости от типа оси контроль
последовательности во время движения и в режиме останова отключен!

5
26 Руководство – MOVIVISION® Программный интерфейс
Система управления осями: Общие настройки
Система управления осями
Система управления осями: Анти-дребезговая защита
Реакция S1e на входной сигнал S1 выполняется только по истечении
установленного времени антидребезговой защиты te. Если к моменту истечения
времени te сигнала больше нет, реакция не выполняется.
Антидребезговая защита используется для фильтрации кратковременных
импульсов. Эти импульсы не должны активировать функции, на вызов которых
настроены инициаторы.
При контроле сигналов ввода-вывода в ведущем устройстве и при отображении
в ПК-приложении верхнего уровня время антидребезговой защиты не учитывается.
5.1.2 Система управления осями: Контроль
Разные осевые модули могут контролировать различные параметры.
Например:
• время движения;
• последовательность активации;
• состояние инициаторов промежуточного контроля, даже в режиме останова.
При параметрировании эти контрольные функции можно отключить.
30002AXX
Рис. 4. Антидребезговая защита
te
S1e
S1
Sig.
tete t
Примечание
Задержку включения или время антидребезговой защиты можно указать для
нескольких датчиков (не более 16)!

Руководство – MOVIVISION® Программный интерфейс 27
5Осевая группа ERB (секция роликового конвейера)
Система управления осями
5.2 Осевая группа ERB (секция роликового конвейера)
Осевая группа ERB содержит типы осей для загрузки палеты или аналогичного
груза.
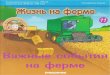
5.2.1 Тип оси ERB01: Две скорости, два направления вращения
Тип оси ERB01:
Применение
Роликовые конвейеры, цепи и т. п. с фотоячейками или индуктивными
бесконтактными датчиками. Переключение "быстро/медленно", загрузка в обоих
направлениях.
В данном случае датчики переключения "быстро/медленно" и промежуточный
контроль являются необязательными. То же самое действительно и для загрузки
в обратном направлении.
Тип оси ERB01:
Принцип
действия
ERB01 может работать с двумя скоростями в двух направлениях.
Две скорости: быстрое перемещение выполняется до момента активации
инициатора "Быстро/медленно". Затем перемещение становится медленным,
пока не сработает инициатор "Стоп". Выполняется остановка и подается сигнал
"В положении".
Если инициатор "Быстро/медленно" не используется, переключение на низкую
скорость можно реализовать через таймер.
Два направления вращения: загрузка и выгрузка возможны как в прямом,
так и в обратном направлении.
30003AXX
Рис. 5. Принцип действия ERB01
[a] Передняя (задняя) сторона[b] Пром.контроль (стоп)[c] - (Б/М)[d] Б/М (-)
[e] Стоп (пром.контроль)[f] Назад[g] Вперед
1 Загрузка вперед2 Выгрузка вперед3 Передача вперед
4 Загрузка назад5 Выгрузка назад6 Передача назад
[b] [c] [e]
[g][f]
1
6
5 4
3
2
[d][a]

5
28 Руководство – MOVIVISION® Программный интерфейс
Осевая группа ERB (секция роликового конвейера)
Система управления осями
Тип оси ERB01:
Команды
Эти команды соответствуют описанию команд для оси в главе "Общее описание
интерфейса ввода-вывода". В команде для оси можно указать конечные
положения со следующими функциями.
Тип оси ERB01:
Состояние
(сигналы
подтверждения)
Это состояние соответствует описанию состояний оси в главе "Общее описание
интерфейса ввода-вывода". Подтверждается состояние оси в следующих текущих
положениях.
Тип оси ERB01:
Контроль
времени
движения
Можно указать следующие значения времени движения:
Положение Функция Описание
0 СТОП Остановить ось, или ни одна команда не активна.
1 Загрузка вперед Прием груза в прямом направлении.
2 Выгрузка вперед Выгрузка груза в прямом направлении.
3 Передача вперед Транзитное прохождение груза в прямом направлении.
4 Загрузка назад Прием груза в обратном направлении.
5 Выгрузка назад Выгрузка груза в обратном направлении.
6 Передача назад Транзитное прохождение груза в обратном направлении.
Положение Состояние Описание
1P Груз принят Груз находится в положении.
2P Пусто Агрегат пуст и – если нет неисправностей – готов к приему груза.
1 Z– Загрузка вперед Груз принимается в прямом направлении и еще не достиг своего конечного положения.
1 Z+ Выгрузка вперед Груз выгружается в прямом направлении и еще не покинул агрегат.
4 Z+ Загрузка назад Груз принимается в обратном направлении и еще не достиг своего конечного положения.
4 Z– Выгрузка назад Груз выгружается в обратном направлении и еще не покинул агрегат.
Примечание
P: В положении (Состояние оси, бит 6); Z+ / Z–: В промежуточном положении
вперед (+ / Состояние оси, бит 4) или назад (– / Состояние оси, бит 5).
Время движения Описание
Время промежуточного контроля
Время движения до промежуточного контроля. Это время движения – необязательное, оно используется только в том случае, если указан вход для инициатора промежуточного контроля. После запуска команды "Загрузка" в течение этого времени груз должен вызвать срабатывание инициатора промежуточного контроля. После этого автоматически начинается отсчет "времени загрузки".
Время загрузки / выгрузки
В течение этого времени груз должен переместиться в нужное положение. Отсчет этого времени начинается после срабатывания датчика промежуточного контроля, или (если этого датчика нет) при запуске команды "Загрузка". По команде "Выгрузка" отсчет этого времени начинается немедленно.
Переключение "быстро/медленно"
Время движения до момента переключения скорости с высокой на низкую (необязательно). Используется только в том случае, если для направления подачи не назначен инициатор "Быстро/медленно", и пользователь активировал таймер.

Руководство – MOVIVISION® Программный интерфейс 29
5Осевая группа ERB (секция роликового конвейера)
Система управления осями
Тип оси ERB01:
Контроль
последова-
тельности
Как при загрузке, так и при выгрузке все инициаторы, для которых используется
эта функция, проверяются на последовательность активации. Они должны
срабатывать в правильной последовательности.
При этом в ПК-приложении верхнего уровня можно указать, используется ли
только положительный фронт сигнала (например, для обычных палет), или
инициатор должен оставаться активным все время, пока над ним находится груз
(например, для палет на полозьях).
Тип оси ERB01:
Передача груза
Команда передачи груза реализуется через команды перемещения "Загрузка"
и "Выгрузка". Сначала палета загружается. Как только активируется инициатор
"Стоп", вместо остановки выполняется переключение на режим "Выгрузка".
Если роликовый конвейер загружен, команда передачи груза не выполняется,
а подается сигнал об ошибке "Неверная команда перемещения". Выполнение
команды "Передача" возможно только в том случае, если роликовый конвейер
пуст или загружен частично (активен инициатор промежуточного контроля или
переключения "быстро/медленно").
5.2.2 Тип оси ERB02: Одна скорость, два направления вращения
Тип оси ERB02:
Применение
Роликовые конвейеры, цепи и т. п. с фотоячейками или индуктивными
бесконтактными датчиками. Загрузка палет (на полозьях) в обоих направлениях.
Тип оси ERB02:
Принцип
действия
ERB02 может работать с одной скоростью в двух направлениях.
Одна скорость: быстрое перемещение выполняется до момента активации
инициатора "Стоп". Выполняется остановка и подается сигнал "В положении".
Примечание
Обработка только по фронту сигнала пока невозможна. Это означает, что
использование оси ERB01 для работы с палетами на полозьях возможно только
при отключенном контроле последовательности!
30004AXX
Рис. 6. Принцип действия ERB02
[a] Контроль интервала 1[b] Стоп[c] Контроль интервала 2
[d] Назад[e] Вперед
1 Загрузка вперед2 Выгрузка вперед3 Передача вперед
4 Загрузка назад5 Выгрузка назад6 Передача назад
[a] [b] [c]
[e][d]
1
6
5 4
3
2

5
30 Руководство – MOVIVISION® Программный интерфейс
Осевая группа ERB (секция роликового конвейера)
Система управления осями
Два направления вращения: загрузка и выгрузка возможны как в прямом,
так и в обратном направлении.
Тип оси ERB02:
Команды
Эти команды соответствуют описанию команд для оси в главе "Общее описание
интерфейса ввода-вывода". В команде для оси можно указать конечные
положения со следующими функциями.
Тип оси ERB02:
Состояние
(сигналы
подтверждения)
Это состояние соответствует описанию состояний оси в главе "Общее описание
интерфейса ввода-вывода". Подтверждается состояние оси в следующих текущих
положениях.
30005AXX
Рис. 7. Направления вращения ERB02
[a] Назад[b] Вперед[c] Стоп
[d] Контроль интервала 1[e] Контроль интервала 2
[a] [b]
[c]
[d] [e]
Положение Функция Описание
0 СТОП Остановить ось, или ни одна команда не активна.
1 Загрузка вперед Прием груза в прямом направлении.
2 Выгрузка вперед Выгрузка груза в прямом направлении.
3 Передача вперед Транзитное прохождение груза в прямом направлении.
4 Загрузка назад Прием груза в обратном направлении.
5 Выгрузка назад Выгрузка груза в обратном направлении.
6 Передача назад Транзитное прохождение груза в обратном направлении.
Положение Состояние Описание
1P Груз принят Груз находится в положении.
2P Пусто Агрегат пуст и – если нет неисправностей – готов к приему груза.
1 Z– Загрузка вперед Груз принимается в прямом направлении и еще не достиг своего конечного положения.
1 Z+ Выгрузка вперед Груз выгружается в прямом направлении и еще не покинул агрегат.
4 Z+ Загрузка назад Груз принимается в обратном направлении и еще не достиг своего конечного положения.
4 Z– Выгрузка назад Груз выгружается в обратном направлении и еще не покинул агрегат.
Примечание
P: В положении (Состояние оси, бит 6); Z+ / Z–: В промежуточном положении
вперед (+ / Состояние оси, бит 4) или назад (– / Состояние оси, бит 5).

Руководство – MOVIVISION® Программный интерфейс 31
5Осевая группа ERB (секция роликового конвейера)
Система управления осями
Тип оси ERB02:
Контроль
времени
движения
Можно указать следующее значение времени движения:
Тип оси ERB02:
Контроль
последова-
тельности
Как при загрузке, так и при выгрузке все инициаторы, для которых используется
эта функция, проверяются на последовательность активации, т. е. они должны
срабатывать в правильной последовательности.
Тип оси ERB02:
Передача груза
Команда передачи груза реализуется через команды перемещения "Загрузка"
и "Выгрузка". Сначала палета загружается, и как только активируется инициатор
"Стоп", вместо остановки выполняется переключение на режим "Выгрузка".
Если роликовый конвейер загружен, команда передачи груза не выполняется,
а подается сигнал об ошибке "Неверная команда перемещения". Выполнение
команды "Передача" возможно только в том случае, если роликовый конвейер
пуст или загружен частично (активен инициатор контроля интервала 1 или 2).
Время движения Описание
Время загрузки / выгрузки В течение этого времени груз должен переместиться в нужное положение или покинуть его. Отсчет этого времени запускается командой "Загрузка" или "Выгрузка".

5
32 Руководство – MOVIVISION® Программный интерфейс
Осевая группа 2POS (выход в два положения)
Система управления осями
5.3 Осевая группа 2POS (выход в два положения)
Осевая группа 2POS содержит типы осей, например, для простых поворотных
столов, простых возвратно-поступательных движений или лафетов.
5.3.1 Тип оси 2POS01: Две скорости, два направления вращения
Тип оси 2POS01:
Применение
Простые поворотные столы, простые возвратно-поступательные движения или
лафеты и т. п. с фотоячейками или индуктивными бесконтактными датчиками.
Переключение "быстро/медленно", выход в переднее и заднее положения.
В данном случае датчики переключения "быстро/медленно" являются
необязательными.
Тип оси 2POS01:
Принцип
действия
2POS01 может работать с двумя скоростями в двух направлениях.
Две скорости: быстрое перемещение выполняется до момента активации
инициатора "Быстро/медленно". Затем перемещение становится медленным,
пока не сработает инициатор "Стоп". Выполняется остановка и подается сигнал
"В положении".
Два направления вращения: перемещение возможно как в прямом, так
и в обратном направлении.
Если в ПК-приложении верхнего уровня инициатор переключения "быстро/
медленно" не назначен, то перемещение выполняется только на высокой
скорости до момента активации инициатора "Стоп".
Тип оси 2POS01:
Команды
Эти команды соответствуют описанию команд для оси в главе "Общее описание
интерфейса ввода-вывода". В команде для оси можно указать конечные
положения со следующими функциями.
30006AXX
Рис. 8. Принцип действия 2POS01
[a] СТОП назад[b] Б/М назад[c] Б/М вперед
[d] СТОП вперед[e] Назад[f] Вперед
1 Двигаться в заднее положение (1)2 Двигаться в переднее положение (2)
[a] [b] [c]
[f][e]
1
2
[d]
Положение Функция Описание
0 СТОП Остановить ось, или ни одна команда не активна.
1 Двигаться в заднее положение Агрегат движется в заднее положение (положение 1).
2 Двигаться в переднее положение Агрегат движется в переднее положение (положение 2).

Руководство – MOVIVISION® Программный интерфейс 33
5Осевая группа 2POS (выход в два положения)
Система управления осями
Тип оси 2POS01:
Состояние
(сигналы
подтверждения)
Это состояние соответствует описанию состояний оси в главе "Общее описание
интерфейса ввода-вывода". Подтверждается состояние оси в следующих текущих
положениях.
Тип оси 2POS01:
Контроль
времени
движения
Можно указать следующие значения времени движения:
Тип оси 2POS01:
Контроль
последова-
тельности
Все инициаторы проверяются на последовательность активации. Они должны
срабатывать в правильной последовательности.
Положение Состояние Описание
1P В заднем положении Агрегат находится в заднем положении (положение 1).
2P В переднем положении Агрегат находится в переднем положении (положение 2).
1 Z+ Промежуточное положение Агрегат находится между задним и передним положениями.
Примечание
P: В положении (Состояние оси, бит 6); Z+: В промежуточном положении вперед
(+ / Состояние оси, бит 4).
Время движения Описание
Общее время движения Время движения из одного положения в другое.

5
34 Руководство – MOVIVISION® Программный интерфейс
Осевая группа 3POS (выход в три положения)
Система управления осями
5.4 Осевая группа 3POS (выход в три положения)
Осевая группа 3POS содержит типы осей, например, для простых возвратно-
поступательных движений (ход эксцентрика).
5.4.1 Тип оси 3POS01: Одна скорость, одно направление вращения
Тип оси 3POS01:
Применение
Например, простые эксцентриковые поворотные столы с индуктивными
бесконтактными датчиками. При этом привод работает только в одном
направлении. Стол может принимать следующие положения
• нижнее;
• среднее (необязательно);
• верхнее.
Тип оси 3POS01:
Принцип
действия
3POS01 вращается с одной скоростью в одном направлении. Возможен выход
в три положения.
Проверяются время движения и последовательность срабатывания инициаторов.
Ось находится в положении, когда инициатор активен. Поэтому активное
состояние датчика должно обеспечиваться в течение всего торможения до полной
остановки.
Тип оси 3POS01:
Команды
Эти команды соответствуют описанию команд для оси в главе "Общее описание
интерфейса ввода-вывода". В команде для оси можно указать конечные
положения со следующими функциями.
30007AXX
Рис. 9. Принцип действия 3POS01
[a] Инициатор 1[b] Инициатор 2[c] Инициатор 3
1 Двигаться в нижнее положение2 Двигаться в среднее положение3 Двигаться в верхнее положение
[a]
[b]
[c]1
2
3
Положение Функция Описание
0 СТОП Остановить ось, или ни одна команда не активна.
1 Двигаться в нижнее положение Агрегат движется в нижнее положение (положение 1).
2 Двигаться в среднее положение Агрегат движется в среднее положение (положение 2).
3 Двигаться в верхнее положение Агрегат движется в верхнее положение (положение 3).
64 Двигаться в следующее положение
Агрегат движется в следующее положение. Для выхода в каждое последующее положение эту команду нужно сбросить и снова активировать.

Руководство – MOVIVISION® Программный интерфейс 35
5Осевая группа 3POS (выход в три положения)
Система управления осями
Тип оси 3POS01:
Состояние
(сигналы
подтверждения)
Это состояние соответствует описанию состояний оси в главе "Общее описание
интерфейса ввода-вывода". Подтверждается состояние оси в следующих текущих
положениях.
Тип оси 3POS01:
Контроль
времени
движения
Можно указать следующие значения времени движения:
Тип оси 3POS01:
Контроль
последова-
тельности
Все инициаторы проверяются на последовательность активации. Они должны
срабатывать в правильной последовательности.
Положение Состояние Описание
0 Положение неверное Положение не распознано, так как ни один инициатор не активен. Однако ось может выйти в какое-либо положение и – если нет других неисправностей – готова к работе.
1P В нижнем положении Агрегат находится в нижнем положении (положение 1).
2P В среднем положении Агрегат находится в среднем положении (положение 2).
3P В верхнем положении Агрегат находится в верхнем положении (положение 3).
1 Z+ Промежуточное положение нижнее/среднее (нижнее/верхнее)
Агрегат находится между нижним и средним положениями. Если среднее положение не указано, агрегат находится между нижним и верхним положениями.
2 Z+ Промежуточное положение среднее/верхнее
Агрегат находится между средним и верхним положениями.
3 Z+ Промежуточное положение верхнее/нижнее
Агрегат находится между верхним и нижним положениями.
Примечание
P: В положении (Состояние оси, бит 6); Z+: В промежуточном положении вперед
(+ / Состояние оси, бит 4).
Время движения Описание
Нижнее -> Среднее(Нижнее -> Верхнее)
Время движения из нижнего положения в среднее. Если среднее положение не задано, то здесь указывается время движения из нижнего положения в верхнее.
Среднее -> Верхнее Время движения из среднего положения в верхнее (необязательно).
Верхнее -> Нижнее Время движения из верхнего положения в нижнее.

5
36 Руководство – MOVIVISION® Программный интерфейс
Осевая группа XPOS
Система управления осями
5.5 Осевая группа XPOS
Осевая группа XPOS содержит типы осей для перемещения в различные
положения (например, для табличного позиционирования).
5.5.1 Тип оси XPOS01
Тип оси XPOS01:
Применение
Тележки или передвижные подъемники для многоярусных складов
с позиционированием по датчику абсолютного отсчета (например, по лазерному
датчику).
Оси этого типа можно использовать только с преобразователем частоты MCX,
устройства MOVIMOT такой способ позиционирования не поддерживают. При
этом используемые значения скорости сохраняются в преобразователе MCX
(с помощью MOVITOOLS®), в память устройства записываются только заданные
положения.
Тип оси XPOS01:
Принцип
действия
Положения не требуется вводить обязательно в возрастающем порядке, их можно
распределить произвольным образом (например, положение 1: 1000; положение
2: 7000; положение 15: 5000 / единица измерения = [мм]).
Во время движения выполняется контроль пропуска положения или выхода
из него без команды.
Тип оси XPOS01:
Команды
Эти команды соответствуют описанию команд для оси в главе "Общее описание
интерфейса ввода-вывода". В команде для оси можно указать конечные
положения со следующими функциями.
30008AXX
Рис. 10. Принцип действия XPOS01
[a] Вперед[b] Назад[c] Участок перемещения
[d] Положение 1[e] Положение 3[f] Положение 15
[g] Положение 10[h] Положение 4[i] Положение X
[a] [b]
[c]
[i][h][g][f][e][d]
Примечание
Обеспечивается поддержка не более 30 положений.
Положение Функция Описание
0 СТОП Остановить ось, или ни одна команда не активна.
1 Двигаться в положение 1 Агрегат движется в положение 1.
2 Двигаться в положение 2 Агрегат движется в положение 2.
3 Двигаться в положение 3 Агрегат движется в положение 3.
... ... ...
X Двигаться в положение X Агрегат движется в положение X.

Руководство – MOVIVISION® Программный интерфейс 37
5Осевая группа XPOS
Система управления осями
Тип оси XPOS01:
Состояние
(сигналы
подтверждения)
Это состояние соответствует описанию состояний оси в главе "Общее описание
интерфейса ввода-вывода". Подтверждается состояние оси в следующих текущих
положениях.
Тип оси XPOS01:
Выход
в 0-позицию
Для выхода оси в 0-позицию (т. е. в исходное положение) сначала нужно
установить "Ручной режим". Затем командой "Разрешение на выход в 0-позицию"
(команда для оси) можно запустить процедуру выхода в 0-позицию.
Для выхода оси в 0-позицию предусмотрены следующие режимы:
Тип оси XPOS01:
0-позиция =
текущее
положение
Ось вручную устанавливается в нужное исходное положение. Затем командой
"Разрешение на выход в 0-позицию" запускается процедура выхода в 0-позицию.
Положение Состояние Описание
0 Положение неверное
Положение не распознано. Однако ось может выйти в какое-либо положение и – если нет других неисправностей – готова к работе.
1P В положении 1 Агрегат находится в положении 1.
2P В положении 2 Агрегат находится в положении 2.
3P В положении 3 Агрегат находится в положении 3.
... ... ...
X P В положении X Агрегат находится в положении X.
1 Z+ Промежуточное положение
Агрегат находится между положениями 1 и 2.
2 Z+ Промежуточное положение
Агрегат находится между положениями 2 и 3.
3 Z+ Промежуточное положение
Агрегат находится между положениями 3 и 4.
... ... ...
X Z+ Промежуточное положение
Агрегат находится между положениями X и X+1.
Примечание
P: В положении (Состояние оси, бит 6); Z+: В промежуточном положении
(Состояние оси, бит 4)
30009AXX
Рис. 11. XPOS01: 0-позиция = текущее положение
[a] Вперед[b] Назад
[c] Участок перемещения[d] 0-позиция
[a] [b]
[c]
[d]

5
38 Руководство – MOVIVISION® Программный интерфейс
Осевая группа XPOS
Система управления осями
Тип оси XPOS01:
Выход в 0-пози-
цию на положи-
тельный фронт
сигнала
инициатора
0-позиции
По команде "Разрешение на выход в 0-позицию" ось автоматически выходит
в выбранное исходное положение (инициатор). При этом ось движется с низкой
скоростью режима наладки, пока не активируется инициатор 0-позиции. После
этого ось останавливается и текущее положение принимается за начало отсчета.
Тип оси XPOS01:
Выход в 0-пози-
цию на два
фронта сигнала
инициатора
0-позиции
По команде "Разрешение на выход в 0-позицию" ось автоматически выходит
в выбранное исходное положение (инициатор). При этом ось с высокой скоростью
режима наладки проходит над инициатором 0-позиции. После этого ось движется
с низкой скоростью в обратном направлении, пока не активируется инициатор.
Затем ось останавливается и текущее положение принимается за начало отсчета.
Используемые режимы, инициаторы и направления движения выбираются через
программу параметрирования MOVIVISION®.
Во время выхода в 0-позицию возвращаются следующие данные о состоянии оси:
30010AXX
Рис. 12. XPOS01: Выход в 0-позицию на положительный фронт сигнала
[a] Вперед[b] Назад
[c] Участок перемещения[d] 0-позиция
[e] Наладка медленно[f] Положительный фронт сигнала
[a] [b]
[c]
[d]
[f][e]
30011AXX
Рис. 13. XPOS01: Выход в 0-позицию на два фронта сигнала
[a] Вперед[b] Назад
[c] Участок перемещения[d] 0-позиция
[e] Наладка быстро[f] Остановочный путь[g] Точное позиционирование в обратном направлении
Бит Состояние Описание
0x1D Выход в 0-позицию активенНаправление движения – вперед
Выход в 0-позицию активен, тележка движется в прямом направлении. Это состояние подтверждается только в режимах "Выход в 0-позицию на положительный фронт сигнала" и "Выход в 0-позицию на отрицательный фронт сигнала".
0x2D Выход в 0-позицию активенНаправление движения – назад
Выход в 0-позицию активен, тележка движется в обратном направлении. Это состояние подтверждается только в режимах "Выход в 0-позицию на положительный фронт сигнала" и "Выход в 0-позицию на отрицательный фронт сигнала".
0x4D Выход в 0-позицию активенВ исходном положении
Ось находится в исходном положении. Текущее положение по датчику принимается за начало отсчета.
0x49 Выход в 0-позицию завершен
Выход в 0-позицию успешно завершен, ось находится в исходном положении. Теперь для перемещения оси можно установить "Автоматический режим".
[a] [b]
[c]
[d]
[f][e]
[g]

Руководство – MOVIVISION® Программный интерфейс 39
6Алфавитный указатель
6 Алфавитный указатель
M
Modbus/TCP .......................................................19
Входные данные
(устройство -> контроллер) .......19
Выходные данные
(контроллер -> устройство) .......19
Определение области ввода-вывода .......19
Прикладная область ввода/вывода ..........19
Стандартная область ввода/вывода .....19
Функции доступа ........................................20
P
PROFIBUS DP ....................................................17
Входные данные
(устройство -> контроллер) .......18
Выходные данные
(контроллер -> устройство) .......18
Конфигурирование в программе
DP-ведущего ..................................17
Определение области ввода-вывода .......17
Подключение GSD-файла ..........................17
Согласование специальных
параметров блока данных ...........18
Согласование специальных
параметров ведомого ..................18
U
UDP/IP ................................................................21
UDP-порты .................................................22
Входные данные
(устройство -> контроллер) .......21
Выходные данные
(контроллер -> устройство) .......21
Определение области ввода-вывода .......21
Прикладная область ввода/вывода ..........22
Стандартная область ввода/вывода .....21
В
Важные указания .................................................4
Введение ..............................................................6
И
Интерфейс ввода-вывода
Входы модулей ввода-вывода ...................12
Выходы модулей ввода-вывода .................15
Задание уставки для привода ..................16
Информация о состоянии ...........................8
Команда 1...3 для Tec-Unit ..........................14
Команда для оси .........................................14
Команда для привода .................................15
Команда для уровня управления ...............13
Команды ......................................................13
Локальные входы ........................................12
Локальные выходы .....................................15
Общая команда ...........................................13
Общее состояние ........................................8
Общие данные об ошибке ........................... 9
Ошибка Tec-Unit ......................................... 10
Ошибка оси ................................................ 11
Ошибка привода ........................................ 11
Состояние 2 Tec-Unit ................................ 10
Состояние Tec-Unit ..................................... 9
Состояние оси ........................................... 10
Состояние привода ................................... 11
Состояние уровня управления .................. 9
Состояние цепи аварийной защиты ...... 12
О
Общее описание интерфейса ввода-вывода ... 8
Осевая группа 2POS
(выход в два положения) ................................. 32
Осевая группа 3POS
(выход в три положения) .................................. 34
Осевая группа ERB
(секция роликового конвейера) ....................... 27
Осевая группа XPOS ........................................ 36
П
Предупреждения ................................................ 4
С
Система управления осями ............................. 23
Антидребезговая защита ....................... 26
Задержка включения / выключения .......... 25
Контроль .................................................... 26
Настройка инициаторов .......................... 25
Общие настройки ..................................... 25
Т
Терминология для системы
управления осями ............................................ 24
Тип оси 2POS01
Две скорости, два направления
вращения ....................................... 32
Команды ...................................................... 32
Контроль времени движения ................... 33
Контроль последовательности ............. 33
Применение ................................................ 32
Принцип действия ..................................... 32
Состояние (сигналы подтверждения) .... 33
Тип оси 3POS01
Команды ...................................................... 34
Контроль времени движения ................... 35
Контроль последовательности ............. 35
Одна скорость, одно направление
вращения ....................................... 34
Применение ................................................ 34
Принцип действия ..................................... 34
Состояние (сигналы подтверждения) .... 35
Тип оси ERB01
Две скорости, два направления
вращения ....................................... 27

6
40 Руководство – MOVIVISION® Программный интерфейс
Алфавитный указатель
Команды ......................................................28
Контроль времени движения ....................28
Контроль последовательности ..............29
Передача груза ...........................................29
Применение .................................................27
Принцип действия .....................................27
Состояние (сигналы подтверждения) ....28
Тип оси ERB02
Команды ......................................................30
Контроль времени движения ....................31
Контроль последовательности ..............31
Одна скорость, два направления
вращения ........................................29
Передача груза ...........................................31
Применение .................................................29
Принцип действия .....................................29
Состояние (сигналы подтверждения) ....30
Тип оси XPOS01 ................................................36
0-позиция = текущее положение ..............37
Выход в 0-позицию .....................................37
Выход в 0-позицию на два фронта
сигнала инициатора
0-позиции ........................................38
Выход в 0-позицию на положительный
фронт сигнала
инициатора 0-позиции ..................38
Команды ......................................................36
Применение .................................................36
Принцип действия .....................................36
Состояние (сигналы подтверждения) ....37
У
Указания по технике безопасности ....................4
Условия эксплуатации ........................................5
Утилизация ..........................................................5
Ш
Шинная система / Сети .....................................17

01/2007 41
Центры поставки запасных частей и технические офисы
Германия
Штаб-квартираПроизводствоПродажи
Bruchsal SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42 D-76646 BruchsalАдрес абонентского ящикаPostfach 3023 · D-76642 Bruchsal
Тел. +49 7251 75-0Факс +49 7251 75-1970http://[email protected]
Сервисно- консультативные центры
Центр (редукторы / двигатели)
SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 1 D-76676 Graben-Neudorf
Тел. +49 7251 75-1710Факс +49 7251 [email protected]
Центр (электроника)
SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42 D-76646 Bruchsal
Тел. +49 7251 75-1780Факс +49 7251 [email protected]
Север SEW-EURODRIVE GmbH & Co KGAlte Ricklinger Straße 40-42 D-30823 Garbsen (bei Hannover)
Тел. +49 5137 8798-30Факс +49 5137 [email protected]
Восток SEW-EURODRIVE GmbH & Co KGDänkritzer Weg 1D-08393 Meerane (bei Zwickau)
Тел. +49 3764 7606-0Факс +49 3764 [email protected]
Юг SEW-EURODRIVE GmbH & Co KGDomagkstraße 5D-85551 Kirchheim (bei München)
Тел. +49 89 909552-10Факс +49 89 [email protected]
Запад SEW-EURODRIVE GmbH & Co KGSiemensstraße 1D-40764 Langenfeld (bei Düsseldorf)
Тел. +49 2173 8507-30Факс +49 2173 [email protected]
Горячая линия технической поддержки / круглосуточно +49 180 5 SEWHELP+49 180 5 7394357
Адреса других центров обслуживания в Германии – по запросу.
Франция
ПроизводствоПродажиСервис
Haguenau SEW-USOCOME 48-54, route de Soufflenheim B. P. 20185F-67506 Haguenau Cedex
Тел. +33 3 88 73 67 00 Факс +33 3 88 73 66 00http://[email protected]
СборкаПродажиСервис
Bordeaux SEW-USOCOME Parc d’activités de Magellan62, avenue de Magellan - B. P. 182F-33607 Pessac Cedex
Тел. +33 5 57 26 39 00Факс +33 5 57 26 39 09
Lyon SEW-USOCOME Parc d’Affaires RooseveltRue Jacques TatiF-69120 Vaulx en Velin
Тел. +33 4 72 15 37 00Факс +33 4 72 15 37 15
Paris SEW-USOCOME Zone industrielle 2, rue Denis Papin F-77390 Verneuil I’Etang
Тел. +33 1 64 42 40 80Факс +33 1 64 42 40 88
Адреса других центров обслуживания во Франции – по запросу.
Австралия
СборкаПродажиСервис
Melbourne SEW-EURODRIVE PTY. LTD.27 Beverage DriveTullamarine, Victoria 3043
Тел. +61 3 9933-1000Факс +61 3 9933-1003http://[email protected]
Sydney SEW-EURODRIVE PTY. LTD.9, Sleigh Place, Wetherill Park New South Wales, 2164
Тел. +61 2 9725-9900Факс +61 2 [email protected]
Австрия
СборкаПродажиСервис
Wien SEW-EURODRIVE Ges.m.b.H. Richard-Strauss-Strasse 24A-1230 Wien
Тел. +43 1 617 55 00-0Факс +43 1 617 55 00-30http://[email protected]

42 01/2007
Алжир
Продажи Alger Réducom 16, rue des Frères ZaghnounBellevue El-Harrach16200 Alger
Тел. +213 21 8222-84Факс +213 21 8222-84
Аргентина
СборкаПродажиСервис
Buenos Aires SEW EURODRIVE ARGENTINA S.A.Centro Industrial Garin, Lote 35Ruta Panamericana Km 37,51619 Garin
Тел. +54 3327 4572-84Факс +54 3327 [email protected]
Бельгия
СборкаПродажиСервис
Brüssel CARON-VECTOR S.A.Avenue Eiffel 5B-1300 Wavre
Тел. +32 10 231-311Факс +32 10 231-336http://[email protected]
Болгария
Продажи Sofia BEVER-DRIVE GMBHBogdanovetz Str.1BG-1606 Sofia
Тел. +359 2 9532565Факс +359 2 [email protected]
Бразилия
ПроизводствоПродажиСервис
Sao Paulo SEW-EURODRIVE Brasil Ltda.Avenida Amâncio Gaiolli, 50Caixa Postal: 201-07111-970Guarulhos/SP - Cep.: 07251-250
Тел. +55 11 6489-9133Факс +55 11 6480-3328http://[email protected]
Адреса других центров обслуживания в Бразилии – по запросу.
Великобритания
СборкаПродажиСервис
Normanton SEW-EURODRIVE Ltd.Beckbridge Industrial Estate P.O. Box No.1GB-Normanton, West-Yorkshire WF6 1QR
Тел. +44 1924 893-855Факс +44 1924 893-702http://[email protected]
Венгрия
ПродажиСервис
Budapest SEW-EURODRIVE Kft.H-1037 BudapestKunigunda u. 18
Тел. +36 1 437 06-58Факс +36 1 437 [email protected]
Венесуэла
СборкаПродажиСервис
Valencia SEW-EURODRIVE Venezuela S.A.Av. Norte Sur No. 3, Galpon 84-319Zona Industrial Municipal NorteValencia, Estado Carabobo
Тел. +58 241 832-9804Факс +58 241 [email protected]@cantv.net
Габон
Продажи Libreville Electro-ServicesB.P. 1889Libreville
Тел. +241 7340-11Факс +241 7340-12
Гонконг
СборкаПродажиСервис
Hong Kong SEW-EURODRIVE LTD.Unit No. 801-806, 8th FloorHong Leong Industrial ComplexNo. 4, Wang Kwong Road Kowloon, Hong Kong
Тел. +852 2 7960477 + 79604654Факс +852 2 [email protected]
Греция
ПродажиСервис
Athen Christ. Boznos & Son S.A.12, Mavromichali StreetP.O. Box 80136, GR-18545 Piraeus
Тел. +30 2 1042 251-34 Факс +30 2 1042 251-59http://[email protected]

01/2007 43
Дания
СборкаПродажиСервис
Kopenhagen SEW-EURODRIVE A/SGeminivej 28-30, P.O. Box 100DK-2670 Greve
Тел. +45 43 9585-00Факс +45 43 9585-09http://[email protected]
Индия
СборкаПродажиСервис
Baroda SEW-EURODRIVE India Pvt. LTD.Plot No. 4, GidcPor Ramangamdi · Baroda - 391 243Gujarat
Тел. +91 265 2831021Факс +91 265 [email protected]
Технические офисы
Bangalore SEW-EURODRIVE India Private Limited308, Prestige Centre Point7, Edward RoadBangalore
Тел. +91 80 22266565Факс +91 80 [email protected]
Mumbai SEW-EURODRIVE India Private Limited312 A, 3rd Floor, Acme PlazaAndheri Kurla Road, Andheri (E)Mumbai
Тел. +91 22 28348440Факс +91 22 [email protected]
Ирландия
ПродажиСервис
Dublin Alperton Engineering Ltd. 48 Moyle RoadDublin Industrial EstateGlasnevin, Dublin 11
Тел. +353 1 830-6277Факс +353 1 830-6458
Испания
СборкаПродажиСервис
Bilbao SEW-EURODRIVE ESPAÑA, S.L. Parque Tecnológico, Edificio, 302E-48170 Zamudio (Vizcaya)
Тел. +34 9 4431 84-70Факс +34 9 4431 [email protected]
Италия
СборкаПродажиСервис
Milano SEW-EURODRIVE di R. Blickle & Co.s.a.s.Via Bernini,14 I-20020 Solaro (Milano)
Тел. +39 2 96 9801Факс +39 2 96 [email protected]
Камерун
Продажи Douala Electro-ServicesRue Drouot AkwaB.P. 2024Douala
Тел. +237 4322-99Факс +237 4277-03
Канада
СборкаПродажиСервис
Toronto SEW-EURODRIVE CO. OF CANADA LTD. 210 Walker Drive Bramalea, Ontario L6T3W1
Тел. +1 905 791-1553Факс +1 905 791-2999http://[email protected]
Vancouver SEW-EURODRIVE CO. OF CANADA LTD.7188 Honeyman Street Delta. B.C. V4G 1 E2
Тел. +1 604 946-5535Факс +1 604 [email protected]
Montreal SEW-EURODRIVE CO. OF CANADA LTD.2555 Rue Leger Street LaSalle, Quebec H8N 2V9
Тел. +1 514 367-1124Факс +1 514 [email protected]
Адреса других центров обслуживания в Канаде – по запросу.
Китай
ПроизводствоСборкаПродажиСервис
Tianjin SEW-EURODRIVE (Tianjin) Co., Ltd.No. 46, 7th Avenue, TEDA Tianjin 300457
Тел. +86 22 25322612Факс +86 22 [email protected]://www.sew.com.cn
СборкаПродажиСервис
Suzhou SEW-EURODRIVE (Suzhou) Co., Ltd.333, Suhong Middle RoadSuzhou Industrial ParkJiangsu Province, 215021P. R. China
Тел. +86 512 62581781Факс +86 512 [email protected]

44 01/2007
Колумбия
СборкаПродажиСервис
Bogotá SEW-EURODRIVE COLOMBIA LTDA. Calle 22 No. 132-60Bodega 6, Manzana BSantafé de Bogotá
Тел. +57 1 54750-50Факс +57 1 [email protected]
Кот-д'Ивуар
Продажи Abidjan SICASte industrielle et commerciale pour l’Afrique165, Bld de MarseilleB.P. 2323, Abidjan 08
Тел. +225 2579-44Факс +225 2584-36
Ливан
Продажи Beirut Gabriel Acar & Fils sarlB. P. 80484Bourj Hammoud, Beirut
Тел. +961 1 4947-86 +961 1 4982-72+961 3 2745-39Факс +961 1 4949-71 [email protected]
Литва
Продажи Alytus UAB IrsevaMerkines g. 2ALT-4580 Alytus
Тел. +370 315 79204Факс +370 315 [email protected]
Люксембург
СборкаПродажиСервис
Brüssel CARON-VECTOR S.A.Avenue Eiffel 5B-1300 Wavre
Тел. +32 10 231-311Факс +32 10 231-336http://[email protected]
Малайзия
СборкаПродажиСервис
Johore SEW-EURODRIVE SDN BHD No. 95, Jalan Seroja 39, Taman Johor Jaya81000 Johor Bahru, JohorWest Malaysia
Тел. +60 7 3549409Факс +60 7 [email protected]
Марокко
Продажи Casablanca S. R. M.Société de Réalisations Mécaniques 5, rue Emir Abdelkader05 Casablanca
Тел. +212 2 6186-69 + 6186-70 + 6186-71
Факс +212 2 [email protected]
Нидерланды
СборкаПродажиСервис
Rotterdam VECTOR Aandrijftechniek B.V. Industrieweg 175 NL-3044 AS RotterdamPostbus 10085NL-3004 AB Rotterdam
Тел. +31 10 4463-700Факс +31 10 4155-552http://[email protected]
Новая Зеландия
СборкаПродажиСервис
Auckland SEW-EURODRIVE NEW ZEALAND LTD. P.O. Box 58-428 82 Greenmount driveEast Tamaki Auckland
Тел. +64 9 2745627Факс +64 9 [email protected]
Christchurch SEW-EURODRIVE NEW ZEALAND LTD. 10 Settlers Crescent, FerrymeadChristchurch
Тел. +64 3 384-6251Факс +64 3 [email protected]
Норвегия
СборкаПродажиСервис
Moss SEW-EURODRIVE A/SSolgaard skog 71N-1599 Moss
Тел. +47 69 241-020Факс +47 69 [email protected]

01/2007 45
Перу
СборкаПродажиСервис
Lima SEW DEL PERU MOTORES REDUCTORES S.A.C.Los Calderos 120-124Urbanizacion Industrial Vulcano, ATE, Lima
Тел. +51 1 3495280Факс +51 1 [email protected]
Польша
СборкаПродажиСервис
Lodz SEW-EURODRIVE Polska Sp.z.o.o.ul. Techniczna 5 PL-92-518 Lodz
Тел. +48 42 67710-90Факс +48 42 67710-99http://[email protected]
Португалия
СборкаПродажиСервис
Coimbra SEW-EURODRIVE, LDA. Apartado 15 P-3050-901 Mealhada
Тел. +351 231 20 9670Факс +351 231 20 3685http://[email protected]
Россия
СборкаПродажиСервис
Санкт-Петербург
ЗАО "СЕВ-ЕВРОДРАЙФ" абонентский ящик 36 195220 С.-Петербург Россия
Тел. +7 812 5357142 +7 812 3332522Факс +7 812 5352287, +7 812 3332523http://[email protected]
Технические офисы
Москва ЗАО "СЕВ-ЕВРОДРАЙФ" Тел. +7 495 9337090Факс +7 495 [email protected]
Новосибирск ЗАО "СЕВ-ЕВРОДРАЙФ" Тел. +7 383 3350200 +7 383 3350220Факс. +7 383 [email protected]
Румыния
ПродажиСервис
Bucuresti Sialco Trading SRL str. Madrid nr.4 011785 Bucuresti
Тел. +40 21 230-1328Факс +40 21 230-7170 [email protected]
Сенегал
Продажи Dakar SENEMECA Mécanique GénéraleKm 8, Route de Rufisque B.P. 3251, Dakar
Тел. +221 849 47-70Факс +221 849 [email protected]
Сербия и Черногория
Продажи Beograd DIPAR d.o.o.Kajmakcalanska 54SCG-11000 Beograd
Тел. +381 11 3046677Факс +381 11 [email protected]
Сингапур
СборкаПродажиСервис
Singapore SEW-EURODRIVE PTE. LTD. No 9, Tuas Drive 2 Jurong Industrial Estate Singapore 638644
Тел. +65 68621701 ... 1705Факс +65 68612827Телекс 38 659 [email protected]
Словакия
Продажи Sered SEW-Eurodrive SK s.r.o.Trnavska 920SK-926 01 Sered
Тел. +421 31 7891311Факс +421 31 [email protected]
Словения
ПродажиСервис
Celje Pakman - Pogonska Tehnika d.o.o.UI. XIV. divizije 14SLO – 3000 Celje
Тел. +386 3 490 83-20Факс +386 3 490 [email protected]

46 01/2007
США
ПроизводствоСборкаПродажиСервис
Greenville SEW-EURODRIVE INC. 1295 Old Spartanburg Highway P.O. Box 518Lyman, S.C. 29365
Тел. +1 864 439-7537Факс/Продажи +1 864 439-7830Факс/произв. +1 864 439-9948Факс/сборка +1 864 439-0566Телекс 805 550 http://[email protected]
СборкаПродажиСервис
San Francisco SEW-EURODRIVE INC. 30599 San Antonio St.Hayward, California 94544-7101
Тел. +1 510 487-3560Факс +1 510 [email protected]
Philadelphia/PA SEW-EURODRIVE INC. Pureland Ind. Complex 2107 High Hill Road, P.O. Box 481Bridgeport, New Jersey 08014
Тел. +1 856 467-2277Факс +1 856 [email protected]
Dayton SEW-EURODRIVE INC.2001 West Main Street Troy, Ohio 45373
Тел. +1 937 335-0036Факс +1 937 [email protected]
Dallas SEW-EURODRIVE INC.3950 Platinum Way Dallas, Texas 75237
Тел. +1 214 330-4824Факс +1 214 [email protected]
Адреса других центров обслуживания в США – по запросу.
Таиланд
СборкаПродажиСервис
Chon Buri SEW-EURODRIVE (Thailand) Ltd.Bangpakong Industrial Park 2700/456, Moo.7, Tambol DonhuarohMuang DistrictChon Buri 20000
Тел. +66 38 454281Факс +66 38 [email protected]
Тунис
Продажи Tunis T. M.S. Technic Marketing Service7, rue Ibn EI Heithem Z.I. SMMT2014 Mégrine Erriadh
Тел. +216 1 4340-64 + 1 4320-29Факс +216 1 4329-76
Турция
СборкаПродажиСервис
Istanbul SEW-EURODRIVE Hareket Sistemleri Sirketi Bagdat Cad. Koruma Cikmazi No. 3 TR-34846 Maltepe ISTANBUL
Тел. +90 216 4419163 + 216 4419164 + 216 3838014Факс +90 216 [email protected]
Украина
Технический офис Днепропетровск ООО "СЕВ-ЕВРОДРАЙФ"абонентский ящик 2588Днепропетровск, 49041
Тел. +38 056 7780648Факс +38 056 [email protected]
Финляндия
СборкаПродажиСервис
Lahti SEW-EURODRIVE OYVesimäentie 4FIN-15860 Hollola 2
Тел. +358 3 589-300Факс +358 3 7806-211http://[email protected]
Хорватия
ПродажиСервис
Zagreb KOMPEKS d. o. o.PIT Erdödy 4 IIHR 10 000 Zagreb
Тел. +385 1 4613-158Факс +385 1 [email protected]
Чешская Республика
Продажи Praha SEW-EURODRIVE CZ S.R.O.Business Centrum Praha Luná 591CZ-16000 Praha 6 - Vokovice
Тел. +420 220121234 + 220121236Факс +420 220121237http://[email protected]

01/2007 47
Чили
СборкаПродажиСервис
Santiago de Chile
SEW-EURODRIVE CHILE LTDA.Las Encinas 1295Parque Industrial Valle GrandeLAMPARCH-Santiago de ChileАдрес абонентного ящикаCasilla 23 Correo Quilicura - Santiago - Chile
Тел. +56 2 75770-00Факс +56 2 [email protected]
Швейцария
СборкаПродажиСервис
Basel Alfred lmhof A.G.Jurastrasse 10 CH-4142 Münchenstein bei Basel
Тел. +41 61 41717-17Факс +41 61 41717-00http://[email protected]
Швеция
СборкаПродажиСервис
Jönköping SEW-EURODRIVE ABGnejsvägen 6-8S-55303 JönköpingBox 3100 S-55003 Jönköping
Тел. +46 36 3442-00Факс +46 36 3442-80http://[email protected]
Эстония
Продажи Tallin ALAS-KUUL ASPaldiski mnt.125EE 0006 Tallin
Тел. +372 6593230Факс +372 [email protected]
ЮАР
СборкаПродажиСервис
Johannesburg SEW-EURODRIVE (PROPRIETARY) LIMITEDEurodrive House Cnr. Adcock Ingram and Aerodrome RoadsAeroton Ext. 2Johannesburg 2013P.O.Box 90004Bertsham 2013
Тел. +27 11 248-7000Факс +27 11 [email protected]
Capetown SEW-EURODRIVE (PROPRIETARY) LIMITED Rainbow ParkCnr. Racecourse & Omuramba RoadMontague GardensCape TownP.O.Box 36556Chempet 7442 Cape Town
Тел. +27 21 552-9820Факс +27 21 552-9830Телекс 576 [email protected]
Durban SEW-EURODRIVE (PROPRIETARY) LIMITED2 Monaceo PlacePinetownDurbanP.O. Box 10433, Ashwood 3605
Тел. +27 31 700-3451Факс +27 31 [email protected]
Южная Корея
СборкаПродажиСервис
Ansan-City SEW-EURODRIVE KOREA CO., LTD. B 601-4, Banweol Industrial Estate Unit 1048-4, Shingil-DongAnsan 425-120
Тел. +82 31 492-8051Факс +82 31 [email protected]
Япония
СборкаПродажиСервис
Toyoda-cho SEW-EURODRIVE JAPAN CO., LTD 250-1, Shimoman-no,Toyoda-cho, Iwata gunShizuoka prefecture, 438-0818
Тел. +81 538 373811Факс +81 538 [email protected]




SEW-EURODRIVE – Driving the world

Что движет миром
Мы вместес Вамиприближаем будущее.
Сервисная сеть,охватывающая весь мир, чтобы быть ближе к Вам.
Приводы и системы управления, автоматизирующие Ваш труд и повышающие его эффективность.
Обширные знанияв самых важных отраслях современной экономики.
Бескомпромиссноекачество, высокие стандарты которого облегчают ежедневную работу.
Глобальное присутствие для быстрых и убедительных побед.В решении любых задач.
Инновационныетехнологии, уже сегодня предлагающие решение завтрашних вопросов.
Сайт в Интернете с круглосуточным доступом к информации и обновленным версиям программного обеспечения.
Мотор-редукторы \ Индустриальные редукторы \ Приводная электроника \ Приводная автоматизация \ Обслуживание
SEW-EURODRIVE
Driving the world
SEW-EURODRIVE GmbH & Co KG
P.O. Box 3023 · D-76642 Bruchsal / Germany
Phone +49 7251 75-0 · Fax +49 7251 75-1970
→ www.sew-eurodrive.com