Embed Size (px)
Citation preview
Содержание
Алехин В.Е., Мирошниченко И.П., Рожков Е.В., Сизов В.П. Эксперимен-тальное исследование особенностей метода подсвечивания поверхно-сти объекта контроля для измерения смещений лазерными интерфе-рометрами . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Алтухова М.Л. Исследование напряженного состояния трансверсально-изотропного полупространства при действии сосредоточенной силы 10
Баничук Н.В., Барсук А.А., Макеев Е.В. Задача Ишлинского об упругойустойчивости панелей . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Белов А.А., Дьянов Д.Ю., Игумнов Л.А., Литвинчук С.Ю. Гранично-элементное моделирование решений трехмерных динамических за-дач теории вязкоупругости на основе модификации метода Дурбина 17
Белянкова Т.И., Богомолов А.С., Калинчук В.В. Динамика неоднородныхтел из функционально градиентных материалов . . . . . . . . . . . 22
Белянкова Т.И., Лыжов В.А. Об учете констант III порядка в задачахдинамики электроупругих тел . . . . . . . . . . . . . . . . . . . . . . 27
Болгова А.И. Движение нагрузки с постоянной скоростью по границетрехмерного акустического слоя . . . . . . . . . . . . . . . . . . . . . 32
Буйло С.И. Использование модели пуассоновского потока при идентифи-кации стадий деформации по энергетическим и временным парамет-рам акта акустической эмиссии . . . . . . . . . . . . . . . . . . . . . 37
Буравчук Н.И., Гурьянова О.В., Окороков Е.П., Павлова Л.Н. Влияниеминеральных добавок на физико-механические свойства бетонов . . 41
Бычков А.А., Соловьев А.Н., Рожков Е.В., Шевцов С.Н. Определениеполного набора упругих постоянных полимеркомпозитных и пьезо-композитных материалов на основе частотного зондирования . . . . 46
Глушко Н.В., Ширяева Е.В. Численное моделирование процесса переносапримесей электрическим полем в канале при наличии вибрации . . 52
Глушков Е.В., Голуб М.В. Блокирование упругих волн системой полосо-вых трещин . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Двоскин М.А. О колебаниях предварительно напряженного упругого слоя 62Елаева М.С. Разделение двухкомпонентной смеси при помощи электри-
ческого поля . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Еремеев В.А., Фрейдин А.Б. О кинетической природе гистерезисных яв-
лений при мартенситных фазовых превращениях . . . . . . . . . . . 72Жорник А.И., Жорник В.А., Савочка П.А. Развитие трещиноподобных
дефектов в цилиндрах из неорганического стекла при его закалке . 76Журавлев Г.А. К определению взаимосвязей основных факторов контак-
та тел, моделируемых упругими роликами с пересекающимися подмалым углом осями . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Зарецкая М.В. О моделировании переноса субстанции плюмов в конве-кективно движущейся среде . . . . . . . . . . . . . . . . . . . . . . . 86
Захарова С.В., Наседкин А.В., Шихман В.М. Исследование многослой-ных высокочувствительных акусто-эмиссионных датчиков . . . . . . 88
4
Зенин О.К., Кизилова Н.Н., Филиппова Е.Н. Исследование проводимостикоронарного русла для стационарного и волнового кровотока . . . . 93
Иваночкин П.Г. Термомеханический расчет подшипника скольжения су-хого трения с двухслойной втулкой . . . . . . . . . . . . . . . . . . . 98
Кабельков В.А., Кабельков А.Н., Нефедов В.В. Некоторые проблемы оп-тимального управления колебаниями высотных сооружений . . . . . 102
Каламбет В.Б., Анджикович И.Е., Калинчук В.В. Крутильные колебаниябандажа на поверхности заполненного жидкостью цилиндра . . . . 106
Карнаух А.Ю. Об устойчивости кольцевой пластинки, разделяющей жид-кость разной плотности . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Кириллова Е.В., Сыромятников П.В. Вычислительные аспекты расче-та напряженно-деформированного состояния композитных матери-алов: конечноэлементные и аналитические методы . . . . . . . . . . 114
Костандов Ю.А., Медведев В.С. Зависимость энергоемкости разрушенияматериалов от параметров инструментального резания . . . . . . . . 117
Майстренко А.В. Концентрация напряжений в элементах конструкциилетательного аппарата . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Мирошниченко И.П., Паринов И.А., Серкин А.Г., Сизов В.П. О Перспек-тивах комплексной коррекции результатов измерений малых пере-мещений лазерными интерферометрами . . . . . . . . . . . . . . . . 128
Нaдолин К.А. Численное моделирование пассивного переноса вещества всверхмелком русловом потоке . . . . . . . . . . . . . . . . . . . . . . 133
Наседкин А.В. Конечно-элементное моделирование контактного взаимо-действия в трибосистеме "колесо – рельс" с учетом неоднородно-стей, изнашивания профилей и температурных эффектов . . . . . . 139
Нестерова Ю.Ю. О сдвиговых колебаниях неоднородного анизотропногослоя . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
Павлова А.В., Рубцов С.Е. К исследованию установившихся колебанийупругой среды с покрытием при наличии внутренних дефектов . . . 149
Панфилов И.А., Устинов Ю.А. Собственные частоты и формы цилиндри-ческой оболочки с винтовой анизотропией . . . . . . . . . . . . . . . 152
Петровская Н.В. Маломодовые модели динамики двумерных теченийидеальной несжимаемой жидкости . . . . . . . . . . . . . . . . . . . 156
Пинчук Н.А., Столяр А.М. Численное и асимптотическое интегрированиеначально-краевой задачи с подвижной границей . . . . . . . . . . . 161
Рашидова Е.В., Сметанин Б.И., Соболь Б.В. Равновесная плоская сим-метричная трещина в неограниченной упругой среде . . . . . . . . . 166
Сафроненко В.Г., Трифонов В.В., Шутько В.М. Термовязкоупругие за-дачи стационарной динамики оболочек вращения из полимерногокомпозита . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Скалиух А.С. Колебания неоднородно поляризованного стержня . . . . . 175Суворова Т.В., СтоляровЮ.В. Колебания пористого слоя в условиях пол-
ного и частичного водонасыщения . . . . . . . . . . . . . . . . . . . 180Сухов Д.Ю. Численно–аналитическое исследование равновесия нелиней-
но упругого цилиндра, содержащего изолированный дефект . . . . . 183
5
Сыромятников П.В., Ратнер С.В. Анизотропные тела с трещинами . . . 187Трепачев В.В. Дифракция поверхностной волны на решетке цилиндров . 190Трубчик И.С. Исследование влияния перемены знака градиента упругих
свойств среды при решении контактных задач для неоднородного слоя194УстиновЮ.А., Ватульян К.А. Задача Сен-Венана для призмы со сложной
анизотропией . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199Хапилова Н.С., Залётов В.В. Неустановившееся давление газа в окрест-
ности трещины гидроразрыва . . . . . . . . . . . . . . . . . . . . . . 202Чебаков М.И., Иваночкин П.Г., Кармазин П.А. Аналитические методы в
контактной задаче для двойного сферического слоя . . . . . . . . . 207Шапарь С.М. Трехмерные солитоны в стекающей пленке жидкости . . . 211Шейдаков Д.Н. Влияние внутреннего давления на устойчивость растяну-
той трубы из микрополярного материала . . . . . . . . . . . . . . . . 215Шехов В.П. Об ограничении трения в колесном транспорте . . . . . . . . 220Щербак Н.В., Сторожев В.И. Энергетические характеристики нелиней-
ных вторых гармоник поверхностных волн Лява в волноводе с кри-сталлическими компонентами кубической системы . . . . . . . . . . 224
Юдин С.А., Юдин А.С. Устойчивость выпуклых оболочек переменнойкривизны . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ОСОБЕННОСТЕЙМЕТОДА ПОДСВЕЧИВАНИЯ ПОВЕРХНОСТИ ОБЪЕКТА
КОНТРОЛЯ ДЛЯ ИЗМЕРЕНИЯ СМЕЩЕНИЙ ЛАЗЕРНЫМИИНТЕРФЕРОМЕТРАМИ
Алехин В. Е.∗, Мирошниченко И.П.∗,Рожков Е.В.∗∗, Сизов В.П.∗
∗ Ростовский военный институт ракетных войск∗∗ НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону
Представлены результаты экспериментальных исследований особенностей нового ме-тода измерения смещений поверхности объекта контроля (ОК) лазерным интерферомет-ром — метода подсвечивания поверхности ОК, расчетно–теоретическое обоснование ко-торого подробно описано в [1]. Предложены рекомендации по его применению в средствахдиагностики технического состояния силовых элементов конструкций.
Предлагаемые результаты исследований направлены на совершенствованиесредств диагностики технического состояния силовых элементов конструкций раз-личного назначения.
В работе [1] предложен и теоретически обоснован перспективный бесконтакт-ный метод измерения смещений поверхности ОК — метод подсвечивания, осно-ванный на применении лазерных интерферометров, а также на основе результатовчисленного моделирования были сформулированы рекомендации по его использо-ванию в средствах диагностики.
Целью исследований являлось экспериментальное подтверждение рассматри-ваемого метода подсвечивания путем анализа интенсивности оптических полей винтерферограммах в зоне Френеля, создаваемых лазерным интерферометром ивыявление его особенностей.
Экспериментальные исследования были проведены для случая регистрациираспределений интенсивности оптического поля в интерферограммах при изме-рении квазистатических (медленноменяющихся) смещений.
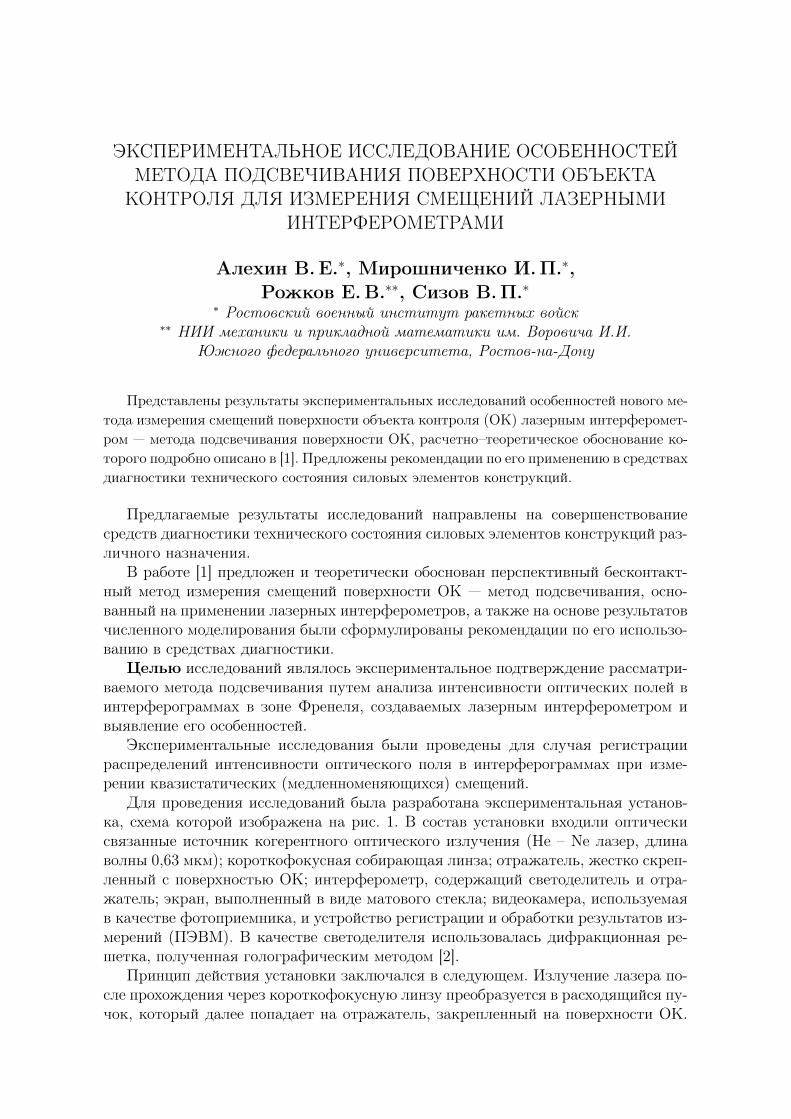
Для проведения исследований была разработана экспериментальная установ-ка, схема которой изображена на рис. 1. В состав установки входили оптическисвязанные источник когерентного оптического излучения (He – Ne лазер, длинаволны 0,63 мкм); короткофокусная собирающая линза; отражатель, жестко скреп-ленный с поверхностью ОК; интерферометр, содержащий светоделитель и отра-жатель; экран, выполненный в виде матового стекла; видеокамера, используемаяв качестве фотоприемника, и устройство регистрации и обработки результатов из-мерений (ПЭВМ). В качестве светоделителя использовалась дифракционная ре-шетка, полученная голографическим методом [2].
Принцип действия установки заключался в следующем. Излучение лазера по-сле прохождения через короткофокусную линзу преобразуется в расходящийся пу-чок, который далее попадает на отражатель, закрепленный на поверхности ОК.
Экспериментальное исследование особенностей метода подсвечивания . . . 7
Отражаясь, луч попадает на интерферометр, который осуществляет разделениеэтого луча: одна часть отражается от поверхности светоделителя (луч L-L), а дру-гая — от поверхности отражателя (луч L*-L*). Сформированные таким образомлучи остаются когерентными [3]. Пространственное совмещение этих лучей про-исходит в области экрана — в области наблюдения интерференционной картины,которая регистрируется видеокамерой и обрабатывается на ПЭВМ.
Рис. 1. Схема измерителя перемещений
В [1] отмечено, что чувствительность метода подсвечивания поверхности раз-лична для различных расстояний между ОК и интерферометром, поэтому припроведении эксперимента ОК располагался и фиксировался на 10 различных рас-стояниях в диапазоне 0.175 м – 0.625 м от внешней поверхности светоделителяинтерферометра поочередно с интервалом 0.05 м. Затем на каждом из этих рас-стояний создавалось смещение поверхности ОК в направлении интерферометра, взадаваемом диапазоне с фиксированным шагом. При каждом смещении поверхно-сти ОК регистрировалось распределение интенсивности оптического поля в зоненаблюдения.
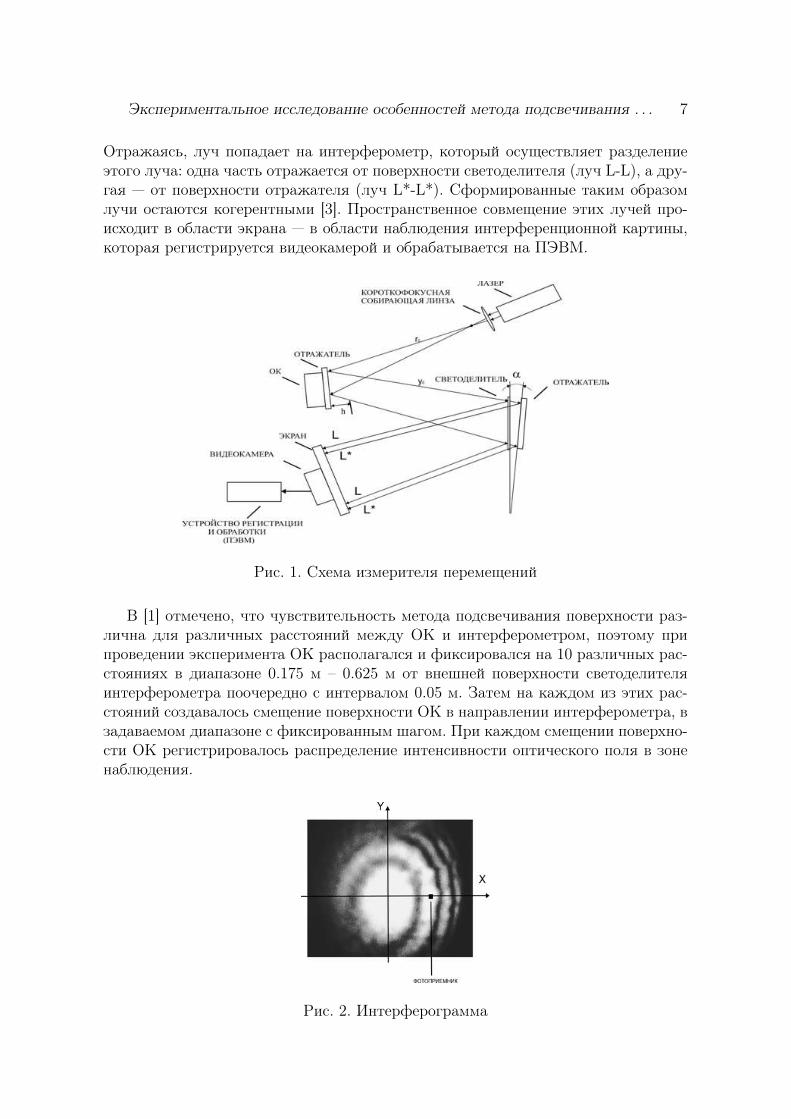
Рис. 2. Интерферограмма
8 Алехин В.Е., Мирошниченко И.П., Рожков Е.В., Сизов В.П.
Проведена обработка измерений интенсивности I, при этом в соответствии срекомендациями [4] выбиралась наиболее контрастная область интерферограммы(см. рис. 2). Интерферограмма в цифровом виде представляет собой дискрети-зированное по строкам и столбцам изображение. Обработка производилась припомощи пакета программ Mathcad 2000 Professional.
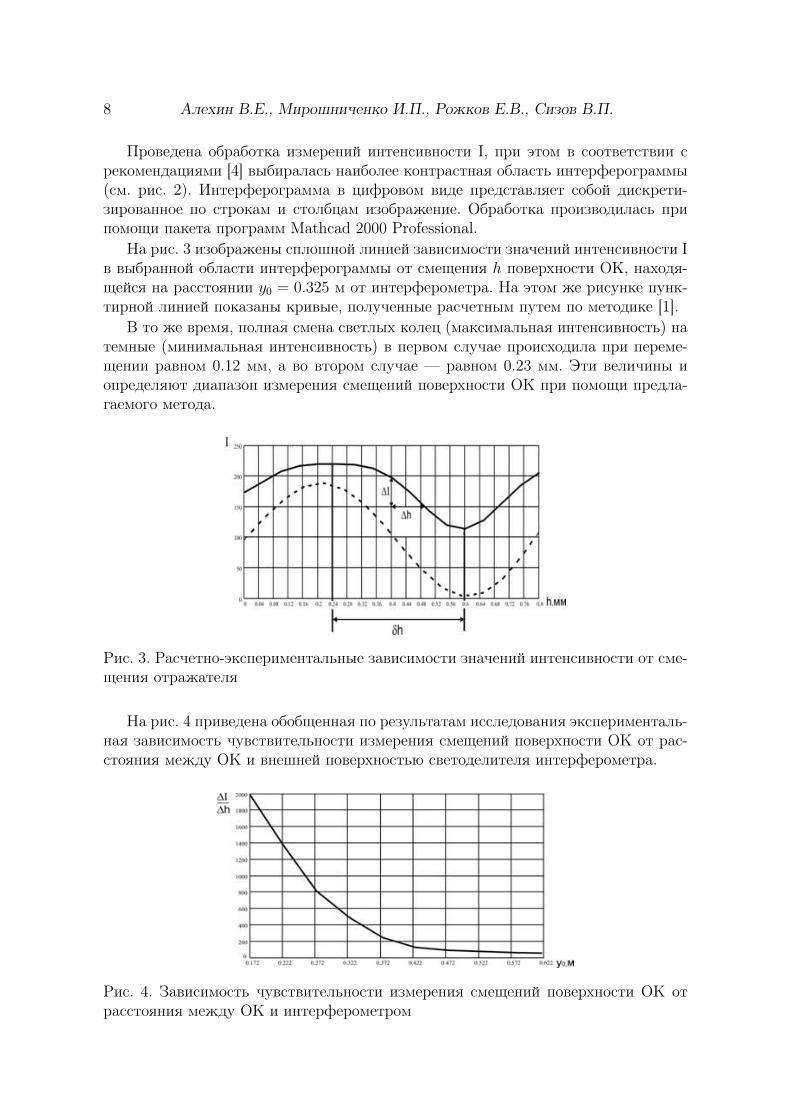
На рис. 3 изображены сплошной линией зависимости значений интенсивности Iв выбранной области интерферограммы от смещения h поверхности ОК, находя-щейся на расстоянии y0 = 0.325 м от интерферометра. На этом же рисунке пунк-тирной линией показаны кривые, полученные расчетным путем по методике [1].
В то же время, полная смена светлых колец (максимальная интенсивность) натемные (минимальная интенсивность) в первом случае происходила при переме-щении равном 0.12 мм, а во втором случае –– равном 0.23 мм. Эти величины иопределяют диапазон измерения смещений поверхности ОК при помощи предла-гаемого метода.
Рис. 3. Расчетно-экспериментальные зависимости значений интенсивности от сме-щения отражателя
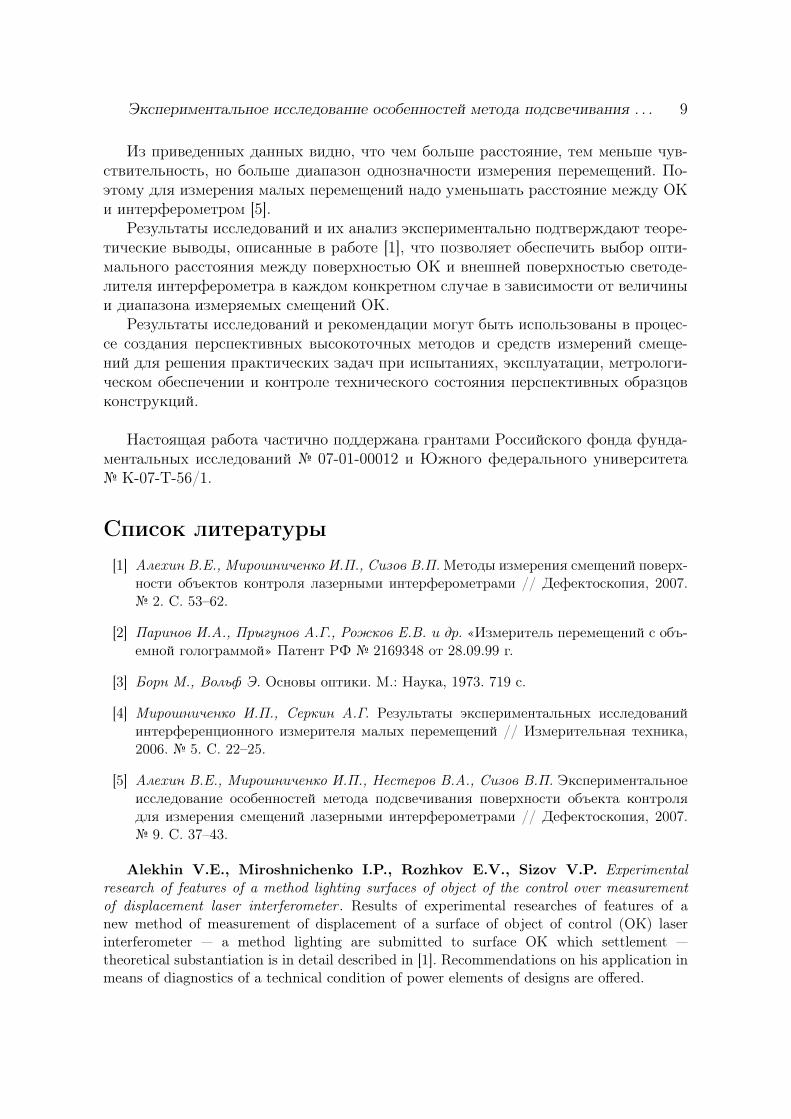
На рис. 4 приведена обобщенная по результатам исследования эксперименталь-ная зависимость чувствительности измерения смещений поверхности ОК от рас-стояния между ОК и внешней поверхностью светоделителя интерферометра.
Рис. 4. Зависимость чувствительности измерения смещений поверхности ОК отрасстояния между ОК и интерферометром
Экспериментальное исследование особенностей метода подсвечивания . . . 9
Из приведенных данных видно, что чем больше расстояние, тем меньше чув-ствительность, но больше диапазон однозначности измерения перемещений. По-этому для измерения малых перемещений надо уменьшать расстояние между ОКи интерферометром [5].
Результаты исследований и их анализ экспериментально подтверждают теоре-тические выводы, описанные в работе [1], что позволяет обеспечить выбор опти-мального расстояния между поверхностью ОК и внешней поверхностью светоде-лителя интерферометра в каждом конкретном случае в зависимости от величиныи диапазона измеряемых смещений ОК.
Результаты исследований и рекомендации могут быть использованы в процес-се создания перспективных высокоточных методов и средств измерений смеще-ний для решения практических задач при испытаниях, эксплуатации, метрологи-ческом обеспечении и контроле технического состояния перспективных образцовконструкций.
Настоящая работа частично поддержана грантами Российского фонда фунда-ментальных исследований 07-01-00012 и Южного федерального университета К-07-Т-56/1.
Список литературы[1] Алехин В.Е., Мирошниченко И.П., Сизов В.П.Методы измерения смещений поверх-
ности объектов контроля лазерными интерферометрами // Дефектоскопия, 2007. 2. С. 53–62.
[2] Паринов И.А., Прыгунов А.Г., Рожков Е.В. и др. «Измеритель перемещений с объ-емной голограммой» Патент РФ 2169348 от 28.09.99 г.
[3] Борн М., Вольф Э. Основы оптики. М.: Наука, 1973. 719 с.
[4] Мирошниченко И.П., Серкин А.Г. Результаты экспериментальных исследованийинтерференционного измерителя малых перемещений // Измерительная техника,2006. 5. С. 22–25.
[5] Алехин В.Е., Мирошниченко И.П., Нестеров В.А., Сизов В.П. Экспериментальноеисследование особенностей метода подсвечивания поверхности объекта контролядля измерения смещений лазерными интерферометрами // Дефектоскопия, 2007. 9. С. 37–43.
Alekhin V.E., Miroshnichenko I.P., Rozhkov E.V., Sizov V.P. Experimentalresearch of features of a method lighting surfaces of object of the control over measurementof displacement laser interferometer . Results of experimental researches of features of anew method of measurement of displacement of a surface of object of control (ОК) laserinterferometer — a method lighting are submitted to surface ОК which settlement —theoretical substantiation is in detail described in [1]. Recommendations on his application inmeans of diagnostics of a technical condition of power elements of designs are offered.
ИССЛЕДОВАНИЕ НАПРЯЖЕННОГО СОСТОЯНИЯТРАНСВЕРСАЛЬНО-ИЗОТРОПНОГО ПОЛУПРОСТРАНСТВА
ПРИ ДЕЙСТВИИ СОСРЕДОТОЧЕННОЙ СИЛЫ
Алтухова М.Л.Институт прикладной математики и механики НАН Украины, Донецк
На основе аналитического решения задачи о действии сосредоточенной силы на гра-нице трансверсально-изотропного полупространства на упругом основании проведенычисленные исследования напряженного состояния.
В работе [1] исследуется напряженное состояние изотропного полупространствана упругом основании при действии сосредоточенной силы здесь результаты [1]обобщаются на случай трансверсально-изотропного полупространства.
Рассматривается осесимметричная смешанная задача теории упругости длятрансверсально-изотропного упругого полупространства z > 0 , плоскости изотро-пии параллельны плоскости z = 0, ограничивающей полупространство. Перпенди-кулярно границе полупространства приложена сосредоточенная сила P . В осталь-ных точках граничной плоскости выполняется условие пропорциональности нор-мальных напряжений σzz и вертикальных смещений w. Касательные напряженияна всей границе отсутствуют. На бесконечности напряжения обращаются в нуль.
В случае осесимметричной задачи напряжения являются функциями коорди-нат r , z . Совместим начало цилиндрической системы координат с точкой прило-жения сосредоточенной силы. Формула для напряжения σzz имеет вид [2]
σzz = − zP
2π√
d(s1 − s2)
1
(s21z
2 + r2)3/2− 1
(s22z
2 + r2)3/2
+
+χP
2π√
d(s1 − s2)
1
s1
∫ +∞
0
te−ts1zJ0(rt)
t + χdt− 1
s2
∫ +∞
0
te−ts2zJ0(rt)
t + χdt
. (1)
Здесь s1, s2 – неравные по модулю корни характеристического уравненияds4 − (a + c)s2 + 1 = 0; a = (a13(a11 − a12)/(a11a33 − a2
13), c = (a13(a11 − a12) +a11a44)/(a11a33 − a2
13), d = (a211 − a2
12)/(a11a33 − a213), aij–упругие постоянные;
χ = (k[a33d−a44a−2a13a](s1+s2)√
d)/(d−ac), k–коэффициент пропорциональностинормальных напряжений и смещений.
Если χ положить равным нулю, то решение будет соответствовать решению,полученному С.Г. Лехницким [3] для трансверсально-изотропного полупростран-ства, когда на границе действует сосредоточенная сила. Влияние пропорциональ-ности нормальных напряжений и смещений обеспечивает вторая скобка слагае-мых, которые зависят от одной постоянной χ, характеризующей упругие свойстватрансверсально-изотропного полупространства и основания.
В (1) входят интегралы с особенностью в 0 и бесконечным верхним преде-лом интегрирования, поэтому для численного расчета напряжений использоваласьпреобразованная формула
Исследование напряженного состояния трансверсально-изотропного ... 11
σzz = − zP
2π√
d(s1 − s2)
1
(s21z
2 + r2)3/2− 1
(s22z
2 + r2)3/2
+
+χP
2π√
d(s1 − s2)
1
s1
√r2 + s2
1z2− 1
s2
√r2 + s2
2z2
−
− χ2P
2π√
d(s1 − s2)
1
s1
∫ +50χr
0
e−ys1z/rJ0(y)
y + χrdy − 1
s2
∫ +50χr
0
e−ys2z/rJ0(y)
y + χrdy
. (2)
Результаты численного исследования (рис. 1–3) проводились для песчаногосланца с упругими постоянными E1 = 1.0741 · 10−9H/м2, E2 = 0.5231 · 10−9H/м2,G = 0.11951 · 10−9H/м2, ν1 = 0.413, ν2 = 0.198. В этом случае s1 = 3.0336,s2 = 0.4973, d = 0.4392.
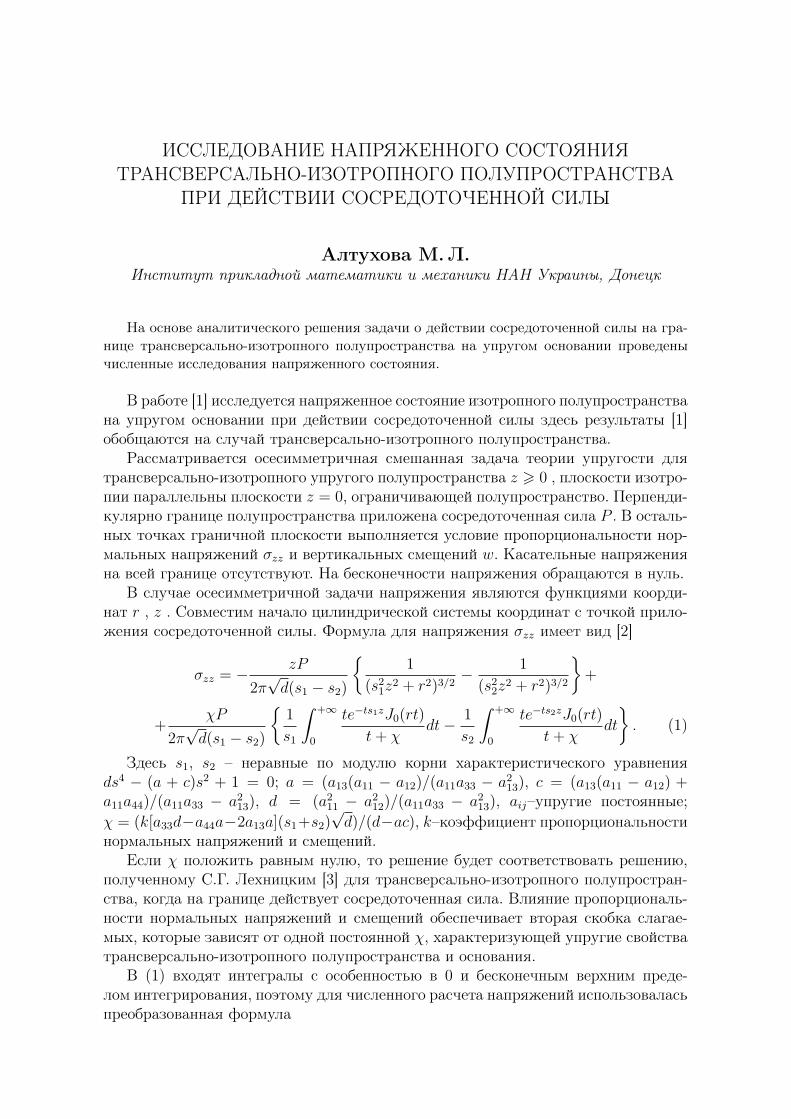
На рис. 1 изображено распределение напряжения σzz в плоскостях z = 0.2,z = 0.6 при χ = 0.8, χ = 0. Сплошные кривые соответствуют решению с учетомупругого основания (χ = 0.8), а пунктирные — решению Лехницкого (χ = 0). Изрисунка видно, что при учете упругого основания напряжения по модулю меньшечем напряжения, рассчитанные по формулам Лехницкого. Абсолютные величиныотрицательных напряжений при r < 0.22 с ростом z быстро уменьшаются, но приr > 0, 22 скорость убывания напряжений замедляется.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−14
−12
−10
−8
−6
−4
−2
0
2
Рис. 1. Распределение напряжения σzz
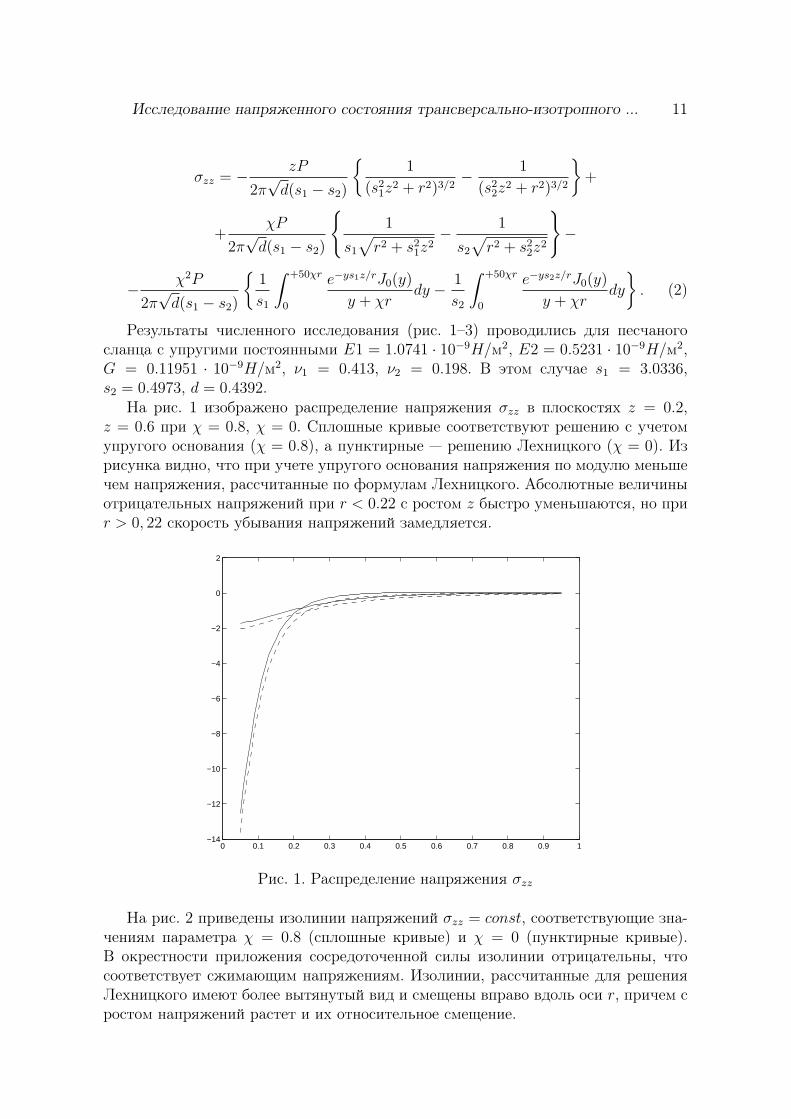
На рис. 2 приведены изолинии напряжений σzz = const, соответствующие зна-чениям параметра χ = 0.8 (сплошные кривые) и χ = 0 (пунктирные кривые).В окрестности приложения сосредоточенной силы изолинии отрицательны, чтосоответствует сжимающим напряжениям. Изолинии, рассчитанные для решенияЛехницкого имеют более вытянутый вид и смещены вправо вдоль оси r, причем сростом напряжений растет и их относительное смещение.
12 Алтухова М.Л.
Учет упругого основания приводит к образованию области растягивающих на-пряжений. Из рисунка видно, что прямая z = 0.05 пересекает изолинию σzz = 0 вточке r = 0.17.
0.05 0.1 0.15 0.2 0.250.05
0.1
0.15
0.2
0.25
Рис. 2. Изолинии σzz = −21,−9,−5,−2,−0.5, 0, 0.2
Исследуем закономерности распределения напряжений вблизи приложения со-средоточенной силы.
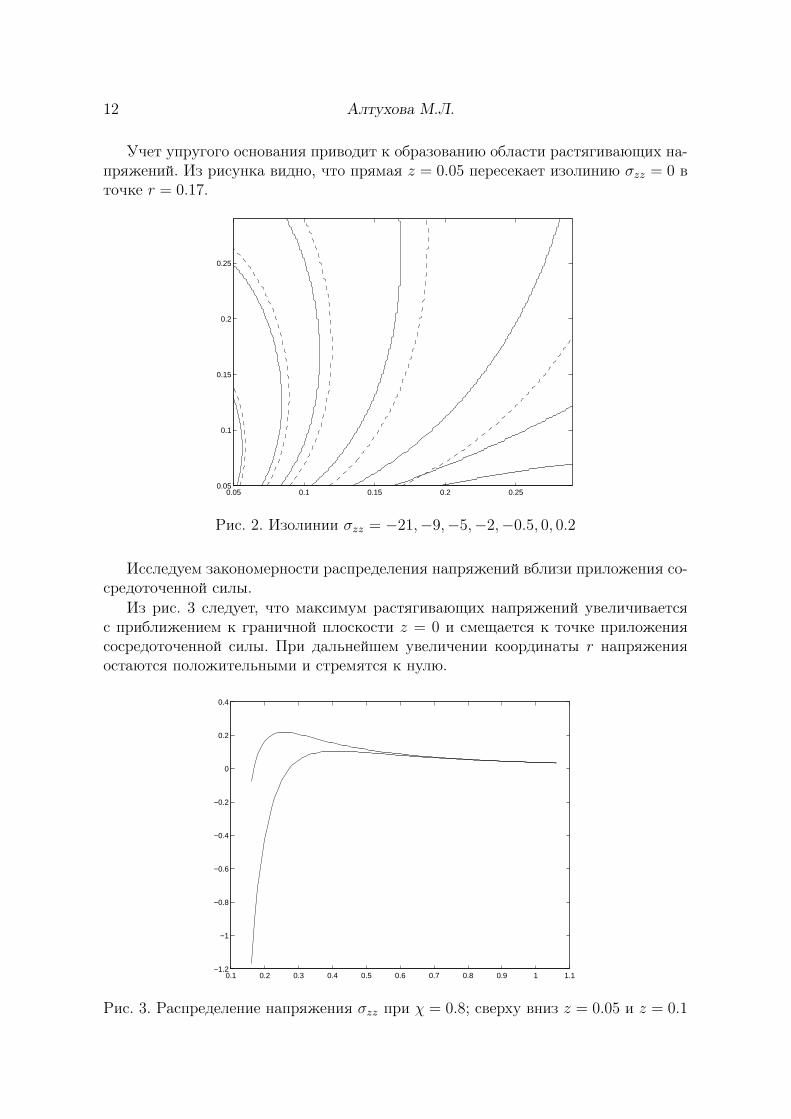
Из рис. 3 следует, что максимум растягивающих напряжений увеличиваетсяс приближением к граничной плоскости z = 0 и смещается к точке приложениясосредоточенной силы. При дальнейшем увеличении координаты r напряженияостаются положительными и стремятся к нулю.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
Рис. 3. Распределение напряжения σzz при χ = 0.8; сверху вниз z = 0.05 и z = 0.1
Исследование напряженного состояния трансверсально-изотропного ... 13
Если в расчетные формулы (2) подставить параметры s1 = 1, s2 = 0.999, d = 1,что соответствует изотропному полупространству, то кривые совпадут с резуль-татами, полученными в работе [1].
Список литературы[1] Сторожев В.И, Залетов В.В., Хапилова Н.С. Численное исследование напряжен-
ного состояния изотропного полупространства на упругом основании при действиисосредоточенной силы. // Материалы Международной научно-технической кон-ференции “Математические модели и алгоритмы для имитации физических про-цессов” (11–14 сентября, 2006, Таганрог, Россия). Т. 1. Физико-математическиеи физико-технические модели и алгоритмы для имитации физических процес-сов//Таганрогский государственный педагогический институт. Таганрог: Изд-во Та-ганрог. гос. пед. ин-та, 2006. С. 274–278.
[2] Алтухова М.Л., Хапилова Н.С. Смешанная задача для трансверсально-изотропного полупространства, лежащего на упругом основании // Теорет. и при-кладная механика. 2004. Вып 39. С. 36–41.
[3] Лехницкий С.Г. Теория упругости анизотропного тела. М.: Наука, 1977. 416 с.
Altukhova M.L. Investigation of transversally isotropic half-space under the influencepoint force. Numerical investigations the state stress of transversally isotropic half-space hadbeen done for the problem about influence the point force on boundary half-space based onanalytical solution.

ЗАДАЧА ИШЛИНСКОГО ОБ УПРУГОЙ УСТОЙЧИВОСТИПАНЕЛЕЙ
Баничук Н.В.∗, Барсук А.А.∗∗, Макеев Е.В.∗∗ Институт проблем механики РАН, Москва
∗∗ Государственный университет, Кишинев, Республика Молдова
В задачах упругой устойчивости бесконечно длинных прямоугольных пластин (пане-лей), шарнирно закрепленных вдоль длинных сторон и нагруженных не изменяющимисяпо длине сжимающими усилиями, обычно предполагается, что функция прогибов пред-ставляет собой цилиндрическую поверхность. Это позволяет заменить решение двумер-ной задачи о потери устойчивости узкой полосы решением соответствующей одномернойзадачи. Однако, данная замена, как это впервые было показано в [1] ( см. также [2-4]),не является вполне строгой и не приводит к адекватному описанию потери устойчи-вости длинных прямоугольных пластинок. Анализ аналитического решения двумернойзадачи для пластинки с конечным отношением длин сторон и последующий предельныйпереход при стремлении длины пластинки к бесконечности показывает, что критиче-ское значение силы потери устойчивости (минимальное собственное число) отличаетсяна конечную величину от критического значения силы сжатия получаемой одномернойзадачи. Аналогичная особенность предельного перехода и имеющееся несоответствие ре-шений двумерных и одномерных задач имеет место и в задаче о свободных колебанияхпластинки при рассмотренных условиях закрепления ее границ [4]. Ниже приводитсяисследование рассмотренных в [4] задач о потере устойчивости и свободных колебани-ях упругих прямоугольных пластин и асимптотический анализ получаемых решений,что позволяет выявить дополнительные особенности спектра собственных значений иповедения собственных форм в зависимости от отношений сторон пластинки.
Исследуется устойчивость упругой прямоугольной пластинки со свободнымибоковыми сторонами длины l и шарнирно закрепленными сторонами длины 2b.К шарнирно опертым краям приложены равномерно распределенные сжимающиеусилия величины p. Отыскание критической величины нагрузки, при которой пла-стина теряет устойчивость и выпучивается, сводится к отысканию минимальногособственного значения p и соответствующей ему собственной функции (формыпотери устойчивости) w = w(x, y) из решения следующей краевой задачи на соб-ственные значения:
D42 w + pwxx = 0, 0 ≤ x ≤ l, −b ≤ y ≤ b (1)
w(0, y) = wxx(0, y) = w(l, y) = wxx(l, y) = 0, −b ≤ y ≤ b (2)
wyy(x,±b) + νwxx(x,±b) = 0, wyyy(x,±b) + (2− ν)wxxy(x,±b) = 0, 0 ≤ x ≤ l (3)
для уравнения поперечного изгиба (1) с граничными условиями опирания (2) играничными условиями отсутствия моментов и перерезывающих сил на свобод-ных краях (3). Здесь D = Eh3/12(1 − ν2) — цилиндрическая жесткость пластин-ки, h — толщина, E и ν — модуль Юнга и коэффициент Пуассона материала,

Задача Ишлинского об упругой устойчивости панелей 15
42 — бигармонический оператор. Нижними индексами x и y обозначены частныепроизводные по соответствующим переменным. Решение задачи (1)-(3) разыски-вается в виде w(x, y) = f(y) sin(πx/l). Граничная задача для отыскания f(y)вбезразмерных обозначениях y = βy, µ = γ2 = pl2/(π2D), ε = l/(πb) (тильда нижеопускается) записывается в виде:
ε4fxxxx − 2ε2fxx + (1− µ)f = 0, −1 ≤ y ≤ 1 (4)
ε2fxx(±1)− νf(±1) = 0, ε3fxxx(±1)− (2− ν)εfx(±1) = 0 (5)
Собственные формы потери устойчивости могут быть классифицированы по чет-ности: f s(y) = f s(−y), fa(y) = −fa(−y). Здесь f sи fa – симметричные и антисим-метричные формы. Вводя обозначения κ± =
√1± γ, получим представления для
симметричных и антисимметричных форм
f s(y) = As cosh(κ+
εy) + Bs cosh(
κ−ε
y), fa(y) = Aa sinh(κ+
εy) + Ba sinh(
κ−ε
y) (6)
Условия существования симметричных и антисимметричных форм приводят кобращению в нуль определителей однородных систем:
4s(γ, ε) = κ−(κ2+−ν)2 cosh(
κ+
ε) sinh(
κ−ε
)−κ+(κ2−−ν)2 sinh(
κ+
ε) cosh(
κ−ε
) = 0 (7)
4a(γ, ε) = κ−(κ2+−ν)2 sinh(
κ+
ε) cosh(
κ−ε
)−κ+(κ2−−ν)2 cosh(
κ+
ε) sinh(
κ−ε
) = 0 (8)
служащих для определения собственных значений при различных величинах па-раметра ε = l/πb.
Ниже будут исследоваться решения задач на собственные значения (4), (5) дляудлиненных прямоугольных в плане пластин, т.е. для малых значений парамет-ра ε, и предельный переход при ε −→ 0. Исследуем отдельно варианты 0 ≤ γ ≤ 1и γ > 1. Значение γ0, найденное ранее в [1], оказывается близким к единице. Длязначений коэффициента Пуассона ν = 0.2; 0.3; 0.5 величина µ = γ2
0 будет, соответ-ственно, равна 0.9994, 0.9962 и 0.9571. Соответствующие собственным значениямγ(ε) ≤ γ0 < 1 симметричные формы f s(y) представляются в виде (C — произволь-ная константа):
f s(y) = C[(ν − κ2
−) cosh(κ+
εy)
(κ2+ − ν) cosh(κ+
ε)
+cosh(κ−
εy)
cosh(κ−ε
)] (9)
Как это видно из (9), с уменьшением ε происходит локализация симметричныхсобственных форм в окрестности свободных сторон, т.е. при y −→ ±1.
Перейдем к рассмотрению антисимметричных форм и соответствующеготрансцендентного уравнения в случае малых ε
4a(y, ε) = κ−(κ2+ − ν)2 − κ+(κ2
− − ν)2 tanh(κ−ε
) = 0 (10)
16 Баничук Н.В., Барсук А.А., Макеев Е.В.
Отметим, что уравнение (10) удовлетворяется при γ = 1. При этом антисиммет-ричная форма, соответствующая собственному значению γ(ε), имеет вид:
fa(y) = C[(ν − κ2
−) sinh(κ+
εy)
(κ2+ − ν) sinh(κ+
ε)
+sinh(κ−
εy)
sinh(κ−ε
)] (11)
В заключение отметим, что предельному собственному значению γ0 соответ-ствует две собственные формы — симметричная и антисимметричная, в которыхполагается γ = γ0.
Отметим также, что все соотношения, рассмотренные при анализе устойчиво-сти, остаются неизменными и в задаче о свободных поперечных колебаниях упру-гой пластинки при соответствующей замене параметров задачи. Следовательно, ив случае колебаний также происходит локализация собственных форм в окрест-ности свободных границ.
Работа выполнена при финансовой поддержке РФФИ (проект 05-08-18094а),Программы ОЭММПУ 14 “Накопление поврежденности, разрушение, изнаши-вание и структурные изменения материалов при интенсивных механических, тем-пературных и радиационных воздействия” и Программы поддержки ведущих на-учных школ НШ-1245.2006.1.
Список литературы[1] Ишлинский А.Ю. Об одном предельном переходе в теории устойчивости прямо-
угольных пластин // Доклады АН СССР. 1954. 3. С. 477–479.
[2] Ишлинский А.Ю. Прикладные задачи механики. Кн. 2 М.: Наука, 1986. 416 с.
[3] Доннелл Л.Г. Балки, пластины и оболочки. М.: Наука, 1982. 567 с.
[4] Баничук Н.В., Ишлинский А.Ю. О некоторых особенностях задач устойчивости иколебаний прямоугольных пластин // ПММ. 1995. 4. С. 620–625.
Banichuk N.V., Barsuk A.A., Makeev E.V. Ishlinskiy problem on buckling of elasticpanels . In the problems of elastic buckling of long rectangular plates (panels) simply supportedalong these boundaries by compressive forces it is supposed that the deflection surface isrepresented by cylindrical surface. This gives us the possibility to reduce the solution oftwo-dimensional problem of elastic narrow panel buckling by the solution of correspondingone-dimensional problem. But this transformation is not rigorous and can not be reduced tocorrect analysis of long rectangular plates buckling. Performed analytical analysis of solutionof two-dimensional problem for plate with finite ratio of boundary lengthes and succeededtransformation when the long boundaries of the rectangular plate tend to infinity show that thecritical buckling force (minimal eigenvalue) is different from the critical value of the bucklingforce in the one-dimensional problem. We present investigations of buckling problems and freevibrations problems of rectangular plates and asymptotic analysis of obtained solutions. Asa result we investigate some singularity of eigenvalues and eigenforms as a function of theboundaries ratio.
ГРАНИЧНО-ЭЛЕМЕНТНОЕ МОДЕЛИРОВАНИЕ РЕШЕНИЙТРЕХМЕРНЫХ ДИНАМИЧЕСКИХ ЗАДАЧ ТЕОРИИ
ВЯЗКОУПРУГОСТИ НА ОСНОВЕ МОДИФИКАЦИИ МЕТОДАДУРБИНА
Белов А.А., Дьянов Д.Ю., Игумнов Л.А., Литвинчук С.Ю.НИИМ ННГУ им. Н.И. Лобачевского, Нижний Новгород
Представлена схема метода граничных элементов совместно с преобразованием Ла-пласа для численного решения граничных интегральных уравнений трехмерной изо-тропной теории вязкоупругости. Использован метод Дурбина с неравномерной кусочно-квадратичной аппроксимацией изображения. Подход позволяет сократить число необхо-димых МГЭ-расчетов на порядок и более. Приведены примеры.
1. Постановка задачиРассматривается однородное тело Ω в трехмерном евклидовом пространстве R3
с декартовой системой координат Ox1x2x3. Границу тела обозначим через Γ. Пред-полагаем, что Ω является изотропным вязкоупругим телом [1], для которого: ρ —плотность материала, λ(t) и µ(t) —функции Ламе материала. Динамическое состо-яние тела Ω описывается системой дифференциальных уравнений Ламе в переме-щениях. Конкретный вид функций µ(t) и λ(t) определяется вязкоупругой модельюматериала. Функции памяти вязкоупругих моделей можно найти в [1]. К исход-ным дифференциальным уравнениям применяется интегральное преобразованиеЛапласа. Вектор перемещений во внутренних точках области связан с граничны-ми значениями перемещений и усилий аналогом формулы Сомильяна, котораяпозволяет построить граничные интегральные уравнения (ГИУ) и разработатьэффективную численную методику для определения неизвестных амплитуд гра-ничных перемещений и поверхностных сил. Решением исходной начально-краевойзадачи будет вектор-функция перемещений u(x, t), полученная путем примененияк решению системы ГИУ обратного преобразования Лапласа. Для численного об-ращения использовался алгоритм, предложенный Дурбиным.
2. Гранично–элементная дискретизацияИмеем следующие ГИУ [1]:
clj(x)uj(x, p) +
∫
Γ
Tlj(x, y, p)uj(y, p)dyS =
∫
Γ
Ulj(x− y, p)tj(y, p)dyS, (1)
где Ulj и Tlj — соответственно изображения по Лапласу компонент тензоров фун-даментальных и сингулярных решений.
Базовый процесс ГЭ–дискретизации состоит в разбиении поверхности Γ = ∂Ωна Ne граничных элементов Ee(1 ≤ e ≤ NE) совокупностью четырехугольных итреугольных восьмиузловых биквадратичных элементов. Неизвестные граничныеполя (u, t) интегрируются через узловые значения uk = u(zk) и tk = t(zk) в ин-терполяционных узлах zk. Рассматривается случай, называемый согласованным
18 Белов А.А., Дьянов Д.Ю., Игумнов Л.А., Литвинчук С.Ю.
интерполированием, где при фиксированном расчетном значении параметра пре-образования Лапласа p для аппроксимации граничных перемещений применимбилинейные элементы, а для аппроксимации поверхностных сил — постоянныеэлементы. Для получения дискретного аналога ГИУ применим метод коллока-ции. За узлы коллокации выбираются узлы аппроксимации исходных граничныхфункций. В итоге формируются системы линейных алгебраических уравнений длякаждой подконструкции.
Для численного обращения решения ГИУ (1) использована следующая моди-фикация алгоритма Дурбина [2, 3]:
f(0) ≈ 1
π
n∑
k=1
[Fk +∆k
24(Zk+1 − Zk)]∆k,
f(t) ≈ eαt
π1
tg1(t) +
1
t2g2(t)−
n∑
k=1
1
t3∆k
[(Zk+1 − Zk)(sin ωk+1t− sin ωkt) + (Yk+1−
−Yk)(cos ωk+1t− cos ωkt)],
где
g1(t) = [Fn +1
8(Zn + 3Zn+1)∆n] sin ωn+1t +
1
8(Y2 + 3Y1)∆1 −G1+
+[Gn +1
8(Yn + 3Yn+1)∆n] cos ωn+1,
g2(t) = −Z1 + Zn+1 cos ωn+1t− Yn+1 sin ωn+1t.
3. Гранично-элементные расчетыРешение задачи о динамической концен-
Рис. 1.
трации напряжений в плите с цилиндро-коническим отверстием приведено нарис. 1–7. Нагрузка равномерно распределе-на по двум противоположным торцам плиты.Размеры конструкции и вид нагруженияпредставлены на рис. 1 (r = 0, 01). Законизменения во времени интенсивности нагрузки
имеет вид: p(t) =p∗
t∗t, 0 ≤ t ≤ t∗, p(t) = p∗,
t ≥ t∗, где t∗ = 40 мкс, p∗ = 107 Па. Расчетыпроизводились для плиты со следующими характеристиками:плотность ρ = 2, 73 · 103кг/м3, коэффициент
Рис. 2.
Пуассона ν = 0, 3, модуль сдвига µ(0) = 2, 75 ·1010Па. Учитывались две плоскости симметрии(x1 = x2 = 0). Развертка использованной ГЭ-сетки изображена на рис. 2. На всей поверхно-сти тела генерировалась сетка из 424 ГЭ.
ГЭ моделир. 3D динамич. з-ч теории вязкоупр. на основе модиф. метода Дурбина 19
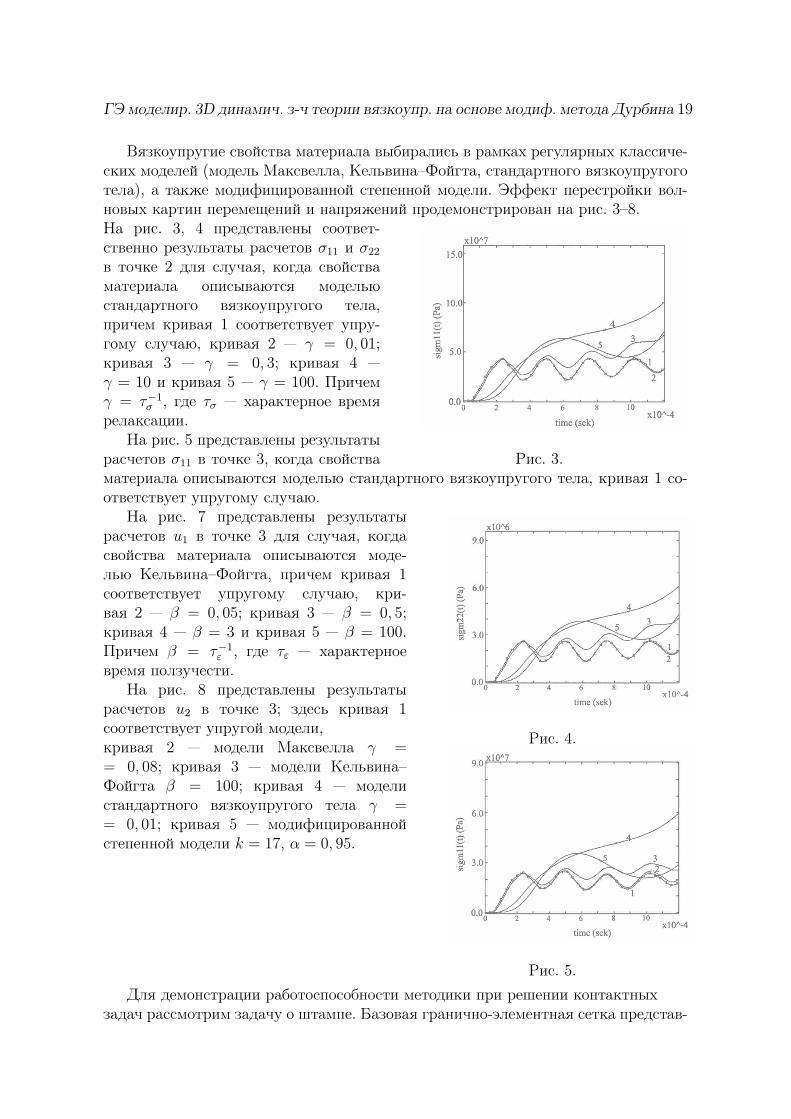
Вязкоупругие свойства материала выбирались в рамках регулярных классиче-ских моделей (модель Максвелла, Кельвина–Фойгта, стандартного вязкоупругоготела), а также модифицированной степенной модели. Эффект перестройки вол-новых картин перемещений и напряжений продемонстрирован на рис. 3–8.На рис. 3, 4 представлены соответ-
Рис. 3.
ственно результаты расчетов σ11 и σ22
в точке 2 для случая, когда свойстваматериала описываются модельюстандартного вязкоупругого тела,причем кривая 1 соответствует упру-гому случаю, кривая 2 — γ = 0, 01;кривая 3 — γ = 0, 3; кривая 4 —γ = 10 и кривая 5 — γ = 100. Причемγ = τ−1
σ , где τσ — характерное времярелаксации.
На рис. 5 представлены результатырасчетов σ11 в точке 3, когда свойстваматериала описываются моделью стандартного вязкоупругого тела, кривая 1 со-ответствует упругому случаю.
На рис. 7 представлены результаты
Рис. 4.
расчетов u1 в точке 3 для случая, когдасвойства материала описываются моде-лью Кельвина–Фойгта, причем кривая 1соответствует упругому случаю, кри-вая 2 — β = 0, 05; кривая 3 — β = 0, 5;кривая 4 — β = 3 и кривая 5 — β = 100.Причем β = τ−1
ε , где τε — характерноевремя ползучести.
На рис. 8 представлены результатырасчетов u2 в точке 3; здесь кривая 1соответствует упругой модели,кривая 2 — модели Максвелла γ =
Рис. 5.
= 0, 08; кривая 3 — модели Кельвина–Фойгта β = 100; кривая 4 — моделистандартного вязкоупругого тела γ == 0, 01; кривая 5 — модифицированнойстепенной модели k = 17, α = 0, 95.
Для демонстрации работоспособности методики при решении контактныхзадач рассмотрим задачу о штампе. Базовая гранично-элементная сетка представ-
20 Белов А.А., Дьянов Д.Ю., Игумнов Л.А., Литвинчук С.Ю.
Рис. 6 Рис. 7
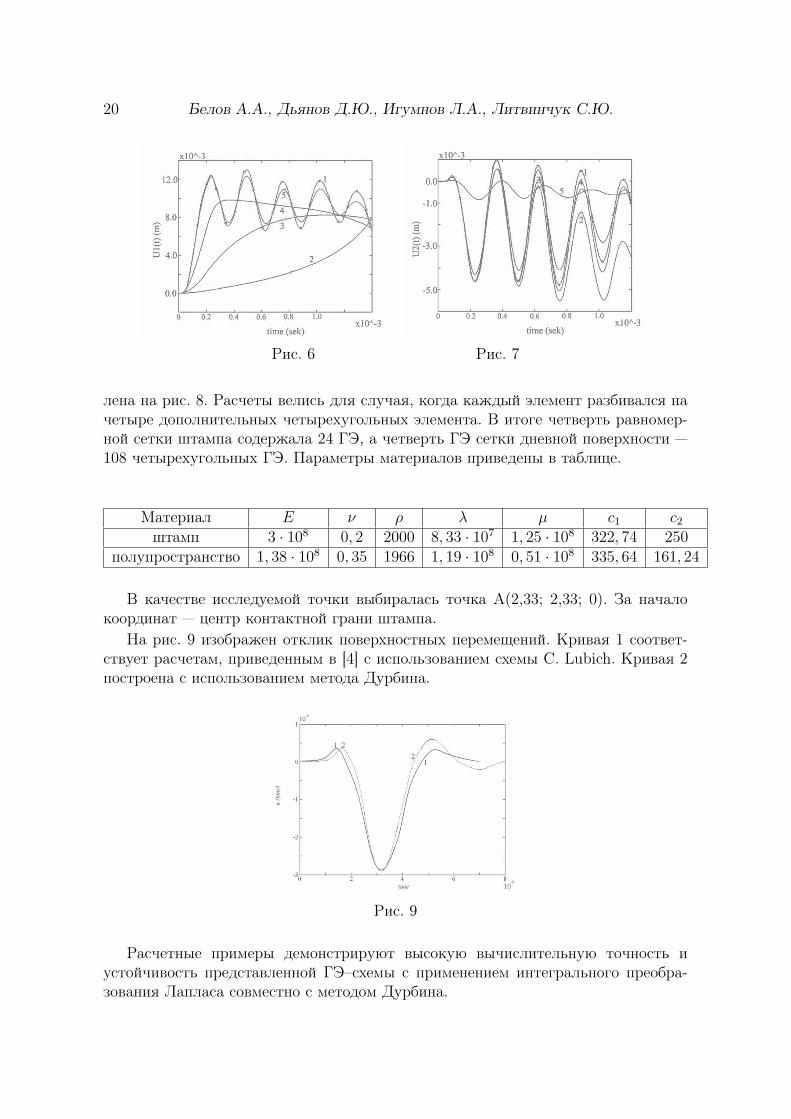
лена на рис. 8. Расчеты велись для случая, когда каждый элемент разбивался начетыре дополнительных четырехугольных элемента. В итоге четверть равномер-ной сетки штампа содержала 24 ГЭ, а четверть ГЭ сетки дневной поверхности —108 четырехугольных ГЭ. Параметры материалов приведены в таблице.
Материал E ν ρ λ µ c1 c2
штамп 3 · 108 0, 2 2000 8, 33 · 107 1, 25 · 108 322, 74 250полупространство 1, 38 · 108 0, 35 1966 1, 19 · 108 0, 51 · 108 335, 64 161, 24
В качестве исследуемой точки выбиралась точка А(2,33; 2,33; 0). За началокоординат — центр контактной грани штампа.
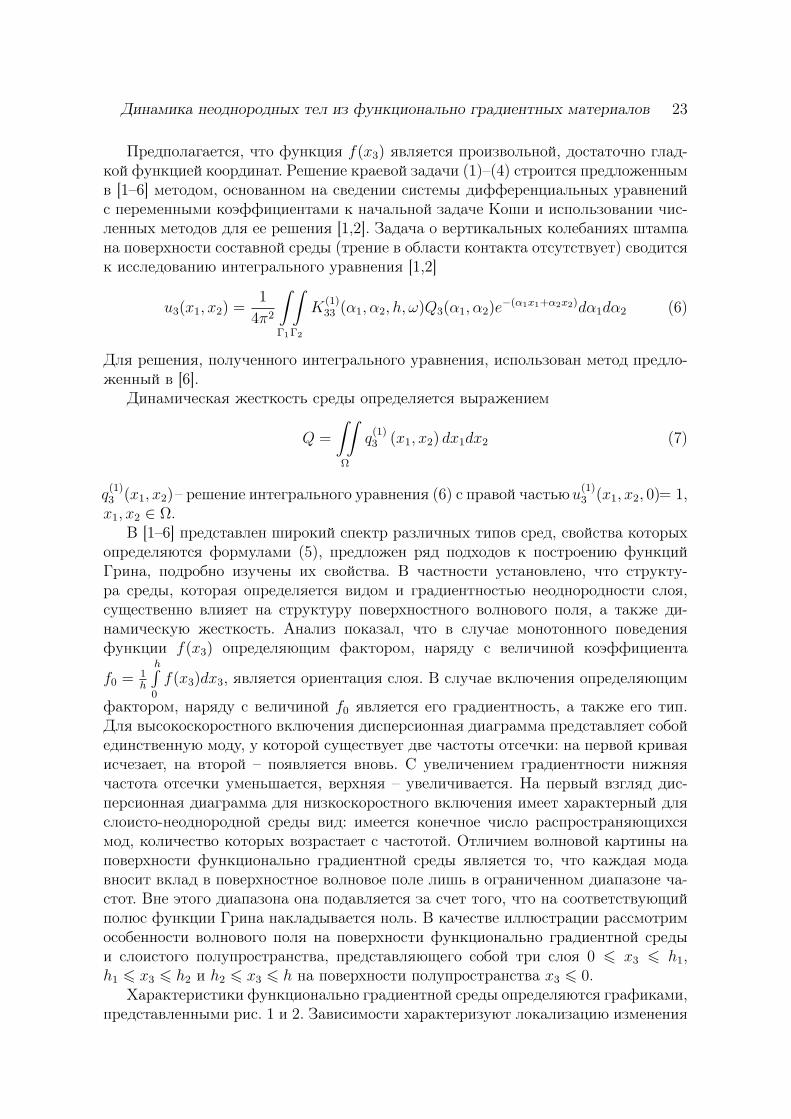
На рис. 9 изображен отклик поверхностных перемещений. Кривая 1 соответ-ствует расчетам, приведенным в [4] с использованием схемы C. Lubich. Кривая 2построена с использованием метода Дурбина.
Рис. 9
Расчетные примеры демонстрируют высокую вычислительную точность иустойчивость представленной ГЭ–схемы с применением интегрального преобра-зования Лапласа совместно с методом Дурбина.
ГЭ моделир. 3D динамич. з-ч теории вязкоупр. на основе модиф. метода Дурбина 21
Список литературы[1] Угодчиков, А.Г., Хуторянский. Н.М. Метод граничных элементов в механике дефор-
мируемого твердого тела. Казань: Изд-во КГУ, 1986. 296 с.
[2] Durbin F. Numerical inversion of Laplace transforms: an efficient improvement to Dubnerand Abate’s method.// The Computer Journal. 1974. V. 17. 4. P. 371–376.
[3] Zhao X. An efficient approach for the numerical inversion of Laplace transform and itsapplication in dynamic fracture analysis of a piezoelectric laminate.// Int.J. of Solids andStructures. 2004. V. 41. P. 3653–3674.
[4] Gaul, L. [et. al.] Boundary Element Methods for the Dynamic Analysis of Elastic,Viscoelastic, and Piezoelectric Solids.// Jhon Wiley and Sons, Ltd., 2004. Encyclopediaof Computational Mechanics: Edited by E. Stein, R. de Borst and Thomas J.R. Hughes.V. 2: Solids and Structures. P. 751–769.
Belov A.A., D’yanov D.Yu., Igumnov L.A., Litvinchuk S.Yu. Boundary-elementmodeling of the analysis of 3-d dynamic viscoelastic problems using a modification of dourbinmethod . A scheme of a boundary element method in combination with the Laplace transformfor numerically analyzing time-boundary integral equations of 3-D isotropic plasticity ispresented. Dourbin method with a non-uniform piecewise-quadratic approximation of theimage is used. The above approach makes it possible to reduce the number of the requiredBEM-analyses by an order or more. Examples are provided.

ДИНАМИКА НЕОДНОРОДНЫХ ТЕЛ ИЗ ФУНКЦИОНАЛЬНОГРАДИЕНТНЫХ МАТЕРИАЛОВ
Белянкова Т.И.∗, Богомолов А.С.∗, Калинчук В.В.∗∗∗ НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону∗∗ Южный научный центр РАН, Ростов-на-Дону
Исследуется динамика неоднородных тел, выполненных из функционально градиент-ных материалов. На примере высокоскоростного и низкоскоростного включений обсуж-дается возможность моделирования градиентной среды слоисто неоднородной.
Эффективное решение проблемы создания функционально градиентных мате-риалов с заданными свойствами обуславливает необходимость не только предвари-тельного определения их структуры, но и оптимизации их динамических свойств.И то и другое возможно лишь на основе развития методов математического моде-лирования, базирующихся на эффективных методах численного восстановленияфункции Грина неоднородной среды.
Исследуются установившиеся колебания составной среды, представляющей со-бой слой 0 6 x3 6 h с переменными по глубине свойствами, лежащий на по-верхности однородного полупространства x3 6 0. На поверхности раздела слоя сполупространством имеют место условия полного сцепления.
Краевая задача о колебаниях неоднородной среды под действием распределен-ной в области Ω нагрузки описывается уравнениями движения [1–6]
∇ ·Θ(i) = ρ(i)∂2u(i)
∂t2(1)
с граничными условиями
n ·Θ(1) =
q(1) (x1, x2) , x3 = h, x1, x2 ∈ Ω0, x3 = h, x1, x2 /∈ Ω
(2)
условиями стыковки слоя с полупространством
u(1) = u(2), t(1)n = t(2)
n , x3 = h, |x1| , |x2| 6 ∞ (3)
и условием на бесконечности
u ↓ 0, x3 → −∞ (4)
Здесь Θ(n) – тензор напряжений Коши, u(n) – вектор смещений точек среды, q(1) –заданный вектор нагрузки, ρ(n) – плотность материала, верхним индексом обо-значены параметры, относящиеся к слою n = 1, или полупространству n = 2.Полагаем, что упругие модули материала представляются в виде:
µ (1)(x3) = µ0 f(x3), λ (1) (x3) = λ 0f(x3), µ (2)(x3) = µ0 , λ (2) (x3) = λ 0 (5)
Динамика неоднородных тел из функционально градиентных материалов 23
Предполагается, что функция f(x3) является произвольной, достаточно глад-кой функцией координат. Решение краевой задачи (1)–(4) строится предложеннымв [1–6] методом, основанном на сведении системы дифференциальных уравненийс переменными коэффициентами к начальной задаче Коши и использовании чис-ленных методов для ее решения [1,2]. Задача о вертикальных колебаниях штампана поверхности составной среды (трение в области контакта отсутствует) сводитсяк исследованию интегрального уравнения [1,2]
u3(x1, x2) =1
4π2
∫
Γ1
∫
Γ2
K(1)33 (α1, α2, h, ω)Q3(α1, α2)e
−(α1x1+α2x2)dα1dα2 (6)
Для решения, полученного интегрального уравнения, использован метод предло-женный в [6].
Динамическая жесткость среды определяется выражением
Q =
∫∫
Ω
q(1)3 (x1, x2) dx1dx2 (7)
q(1)3 (x1, x2)– решение интегрального уравнения (6) с правой частьюu
(1)3 (x1, x2, 0)= 1,
x1, x2 ∈ Ω.В [1–6] представлен широкий спектр различных типов сред, свойства которых
определяются формулами (5), предложен ряд подходов к построению функцийГрина, подробно изучены их свойства. В частности установлено, что структу-ра среды, которая определяется видом и градиентностью неоднородности слоя,существенно влияет на структуру поверхностного волнового поля, а также ди-намическую жесткость. Анализ показал, что в случае монотонного поведенияфункции f(x3) определяющим фактором, наряду с величиной коэффициента
f0 = 1h
h∫0
f(x3)dx3, является ориентация слоя. В случае включения определяющим
фактором, наряду с величиной f0 является его градиентность, а также его тип.Для высокоскоростного включения дисперсионная диаграмма представляет собойединственную моду, у которой существует две частоты отсечки: на первой криваяисчезает, на второй – появляется вновь. С увеличением градиентности нижняячастота отсечки уменьшается, верхняя – увеличивается. На первый взгляд дис-персионная диаграмма для низкоскоростного включения имеет характерный дляслоисто-неоднородной среды вид: имеется конечное число распространяющихсямод, количество которых возрастает с частотой. Отличием волновой картины наповерхности функционально градиентной среды является то, что каждая модавносит вклад в поверхностное волновое поле лишь в ограниченном диапазоне ча-стот. Вне этого диапазона она подавляется за счет того, что на соответствующийполюс функции Грина накладывается ноль. В качестве иллюстрации рассмотримособенности волнового поля на поверхности функционально градиентной средыи слоистого полупространства, представляющего собой три слоя 0 6 x3 6 h1,h1 6 x3 6 h2 и h2 6 x3 6 h на поверхности полупространства x3 6 0.
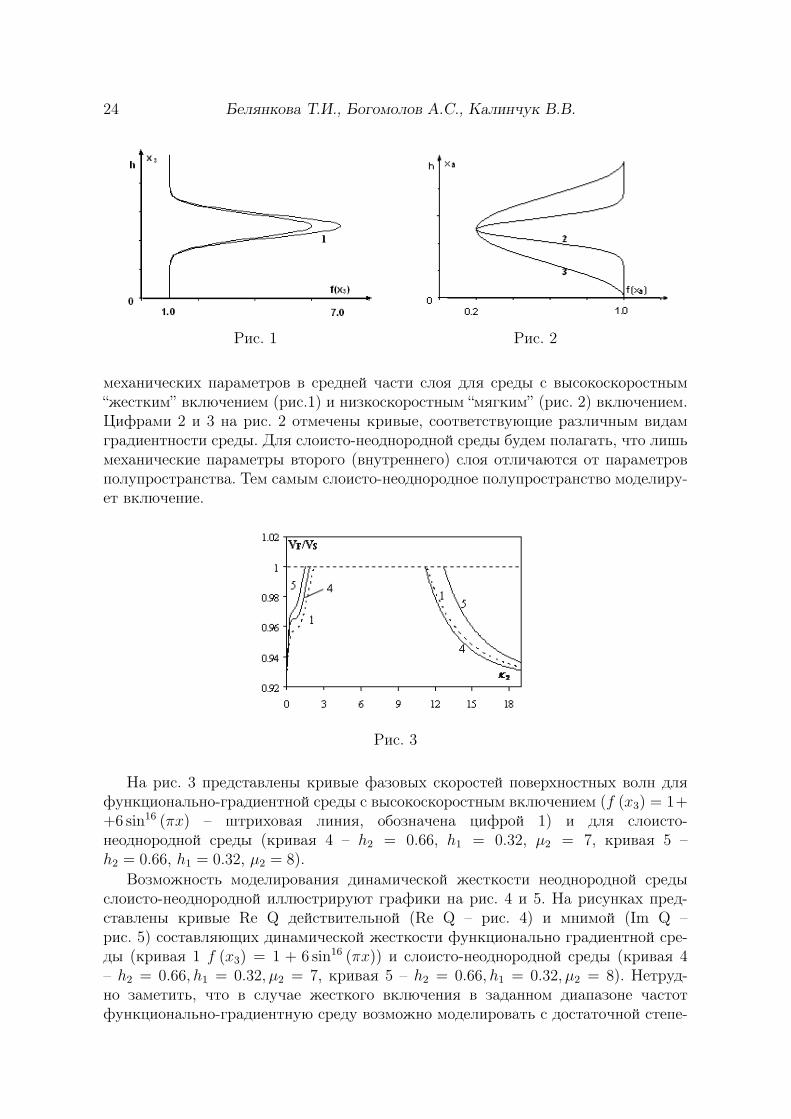
Характеристики функционально градиентной среды определяются графиками,представленными рис. 1 и 2. Зависимости характеризуют локализацию изменения
24 Белянкова Т.И., Богомолов А.С., Калинчук В.В.
Рис. 1 Рис. 2
механических параметров в средней части слоя для среды с высокоскоростным“жестким” включением (рис.1) и низкоскоростным “мягким” (рис. 2) включением.Цифрами 2 и 3 на рис. 2 отмечены кривые, соответствующие различным видамградиентности среды. Для слоисто-неоднородной среды будем полагать, что лишьмеханические параметры второго (внутреннего) слоя отличаются от параметровполупространства. Тем самым слоисто-неоднородное полупространство моделиру-ет включение.
Рис. 3
На рис. 3 представлены кривые фазовых скоростей поверхностных волн дляфункционально-градиентной среды с высокоскоростным включением (f (x3) = 1++6 sin16 (πx) – штриховая линия, обозначена цифрой 1) и для слоисто-неоднородной среды (кривая 4 – h2 = 0.66, h1 = 0.32, µ2 = 7, кривая 5 –h2 = 0.66, h1 = 0.32, µ2 = 8).
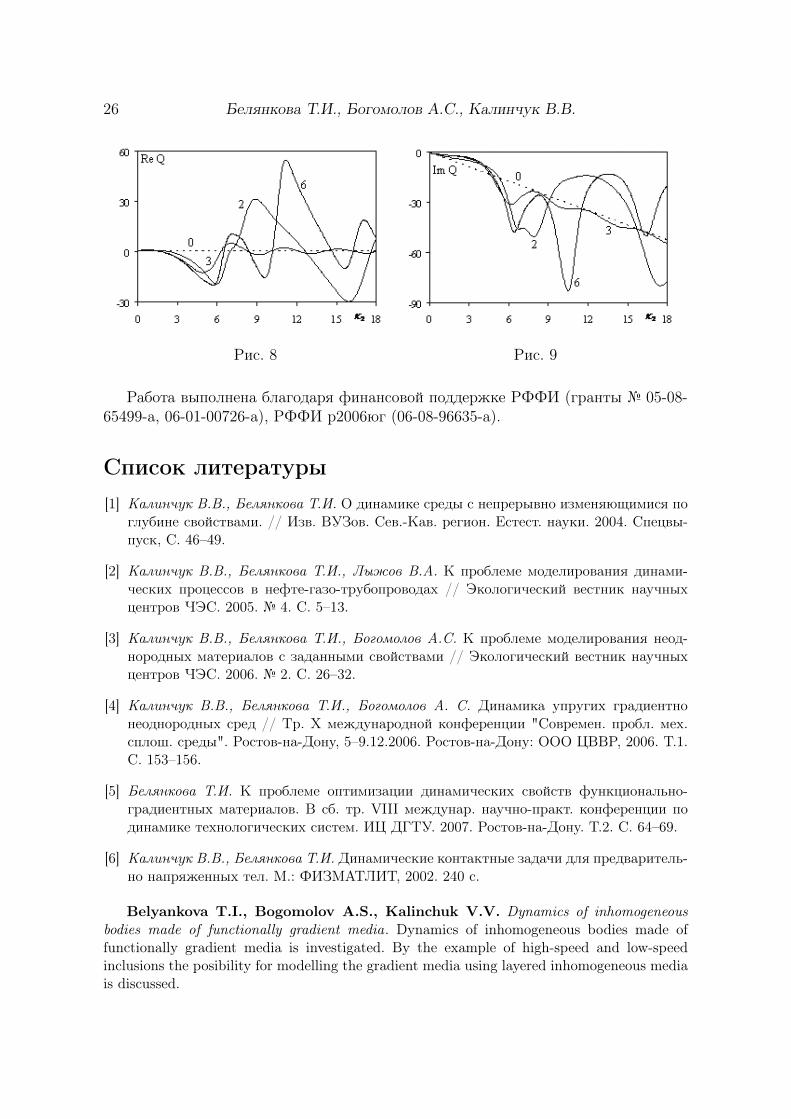
Возможность моделирования динамической жесткости неоднородной средыслоисто-неоднородной иллюстрируют графики на рис. 4 и 5. На рисунках пред-ставлены кривые Re Q действительной (Re Q – рис. 4) и мнимой (Im Q –рис. 5) составляющих динамической жесткости функционально градиентной сре-ды (кривая 1 f (x3) = 1 + 6 sin16 (πx)) и слоисто-неоднородной среды (кривая 4– h2 = 0.66, h1 = 0.32, µ2 = 7, кривая 5 – h2 = 0.66, h1 = 0.32, µ2 = 8). Нетруд-но заметить, что в случае жесткого включения в заданном диапазоне частотфункционально-градиентную среду возможно моделировать с достаточной степе-

Динамика неоднородных тел из функционально градиентных материалов 25
Рис. 4 Рис. 5
нью точности слоисто-неоднородным полупространством со специально подобран-ными параметрами.
Рис. 6 Рис. 7
На рис. 6 и 7 представлены дисперсионные кривые для функционально-градиентной среды с низкоскоростным включением (f (x3) = 1 − 0.8 sin16 (πx)– сплошные линии 2 на рис. 6, f (x3) = 1 − 0.8 sin2 (πx) – сплошные линии 3на рис. 7) и слоисто-неоднородной среды (штриховые линии на рис. 6 и 7 приh2 = 0.66, h1 = 0.32, µ2 = 0.2). Параметры слоисто-неоднородной среды подо-браны таким образом, чтобы за счет механических факторов приблизить функ-цию f (x3) = 1 − 0.8 sin16 (πx) и интегрально приблизить функцию f (x3) == 1 − 0.8 sin2 (πx). Из вида дисперсионных кривых нетрудно видеть, что прибли-жение по механическому принципу является неэффективным. Несмотря на то,что две кривые проявляют полное совпадение, 6 кривым слоистого полупростран-ства соответствуют лишь 3 кривых функционально-градиентной среды. Большеесовпадение проявляется при приближении среды по интегральному принципу.
На рис. 8 и 9 представлены кривые, иллюстрирующие эффективность прибли-жения низкоскоростного включения (кривая 2 – f (x3) = 1−0.8 sin2 (πx), кривая 3 –f (x3) = 1 − 0.8 sin16 (πx)) слоисто-неоднородным полупространством (кривая 6 –h2 = 0.66, h1 = 0.32, µ2 = 0.2). Как видно из графиков, некоторое приближениевозможно лишь на низких частотах. На средних и высоких частотах динамикарассматриваемых сред различается не только количественно, но и качественно.
26 Белянкова Т.И., Богомолов А.С., Калинчук В.В.
Рис. 8 Рис. 9
Работа выполнена благодаря финансовой поддержке РФФИ (гранты 05-08-65499-а, 06-01-00726-а), РФФИ р2006юг (06-08-96635-а).
Список литературы[1] Калинчук В.В., Белянкова Т.И. О динамике среды с непрерывно изменяющимися по
глубине свойствами. // Изв. ВУЗов. Сев.-Кав. регион. Естест. науки. 2004. Спецвы-пуск, С. 46–49.
[2] Калинчук В.В., Белянкова Т.И., Лыжов В.А. К проблеме моделирования динами-ческих процессов в нефте-газо-трубопроводах // Экологический вестник научныхцентров ЧЭС. 2005. 4. С. 5–13.
[3] Калинчук В.В., Белянкова Т.И., Богомолов А.С. К проблеме моделирования неод-нородных материалов с заданными свойствами // Экологический вестник научныхцентров ЧЭС. 2006. 2. С. 26–32.
[4] Калинчук В.В., Белянкова Т.И., Богомолов А. С. Динамика упругих градиентнонеоднородных сред // Тр. X международной конференции "Современ. пробл. мех.сплош. среды". Ростов-на-Дону, 5–9.12.2006. Ростов-на-Дону: ООО ЦВВР, 2006. Т.1.С. 153–156.
[5] Белянкова Т.И. К проблеме оптимизации динамических свойств функционально-градиентных материалов. В сб. тр. VIII междунар. научно-практ. конференции подинамике технологических систем. ИЦ ДГТУ. 2007. Ростов-на-Дону. Т.2. С. 64–69.
[6] Калинчук В.В., Белянкова Т.И. Динамические контактные задачи для предваритель-но напряженных тел. М.: ФИЗМАТЛИТ, 2002. 240 с.
Belyankova T.I., Bogomolov A.S., Kalinchuk V.V. Dynamics of inhomogeneousbodies made of functionally gradient media. Dynamics of inhomogeneous bodies made offunctionally gradient media is investigated. By the example of high-speed and low-speedinclusions the posibility for modelling the gradient media using layered inhomogeneous mediais discussed.
ОБ УЧЕТЕ КОНСТАНТ III ПОРЯДКА В ЗАДАЧАХ ДИНАМИКИЭЛЕКТРОУПРУГИХ ТЕЛ
Белянкова Т.И.∗, Лыжов В.А.∗∗∗ НИИ механики и прикладной математики им. Воровича И.И. Южного
федерального университета, Ростов-на-Дону∗∗ Южный федеральный университет, Ростов-на-Дону
На примере слоистого полупространства из ниобата лития изучено влияние различ-ных видов начального напряженного состояния и величины начальной деформации наскорости распространения волн Гуляева–Блюштейна с учетом констант III порядка.
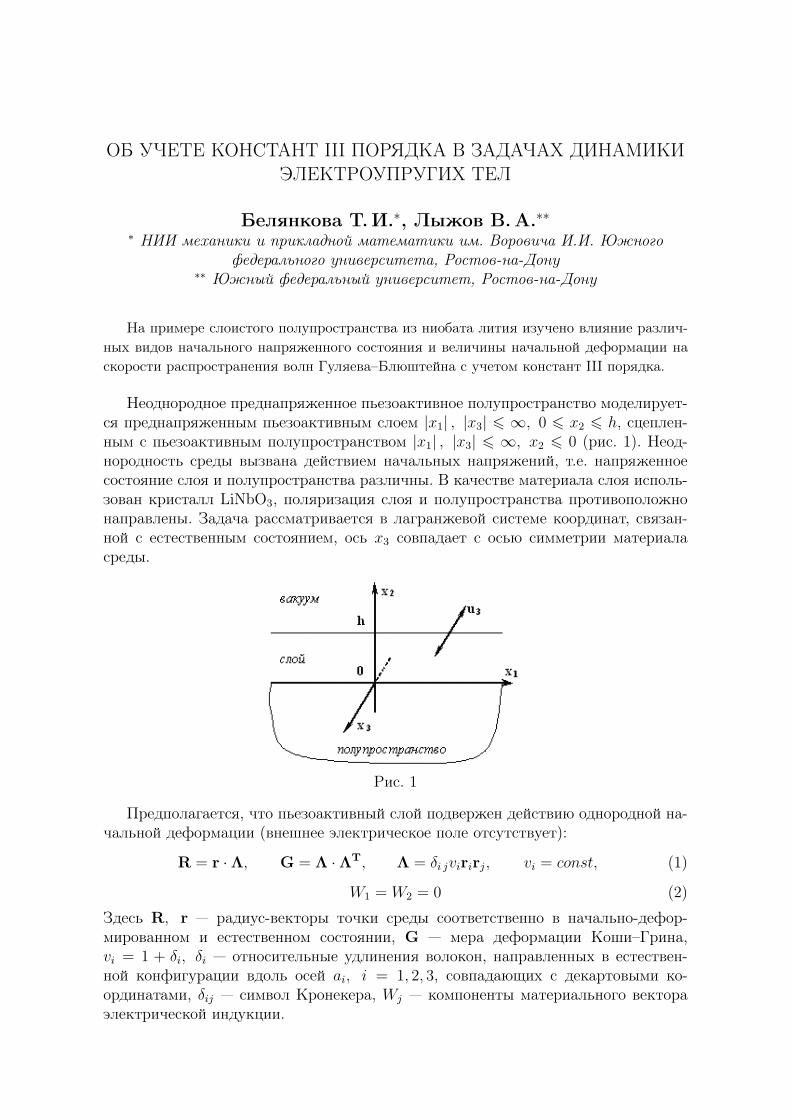
Неоднородное преднапряженное пьезоактивное полупространство моделирует-ся преднапряженным пьезоактивным слоем |x1| , |x3| 6 ∞, 0 6 x2 6 h, сцеплен-ным с пьезоактивным полупространством |x1| , |x3| 6 ∞, x2 6 0 (рис. 1). Неод-нородность среды вызвана действием начальных напряжений, т.е. напряженноесостояние слоя и полупространства различны. В качестве материала слоя исполь-зован кристалл LiNbO3, поляризация слоя и полупространства противоположнонаправлены. Задача рассматривается в лагранжевой системе координат, связан-ной с естественным состоянием, ось x3 совпадает с осью симметрии материаласреды.
Рис. 1
Предполагается, что пьезоактивный слой подвержен действию однородной на-чальной деформации (внешнее электрическое поле отсутствует):
R = r ·Λ, G = Λ ·ΛT, Λ = δi jvirirj, vi = const, (1)
W1 = W2 = 0 (2)
Здесь R, r — радиус-векторы точки среды соответственно в начально-дефор-мированном и естественном состоянии, G — мера деформации Коши–Грина,vi = 1 + δi, δi — относительные удлинения волокон, направленных в естествен-ной конфигурации вдоль осей ai, i = 1, 2, 3, совпадающих с декартовыми ко-ординатами, δij — символ Кронекера, Wj — компоненты материального вектораэлектрической индукции.

28 Белянкова Т.И., Лыжов В.А.
В рамках линеаризованной теории наложения малых деформаций на конечныеи с учетом сделанных предположений, движение преднапряженной электроупру-гой среды описывается уравнениями (n = 0 — вакуум, n = 1 — слой, n = 2 —полупространство) [1,2]
x2 6 h : θ(n)23,1 + θ
(n)13,2 = ρ(n)∂
2u(n)3
∂t2(3)
∆(n)1,1 + ∆
(n)2,2 = 0 (4)
x2 > h : ϕ(0),11 + ϕ
(0),22 = 0 (5)
Граничные условия:x2 = h : θ
(1)23 = 0 (6)
∆(1)2 = ∆
(0)2 , ϕ(1) = ϕ(0) (электрически открытые условия) (7)
ϕ(1) = 0 (электрически закрытые условия) (8)
x2 = 0 : θ(1)23 = θ
(2)23 , ue(1) = ue(2), ∆
(1)2 = ∆
(2)2 (9)
x2 → −∞ : ue(2) → 0; x2 →∞ : ϕ(0) → 0 (10)
Здесь θ(n)lk , ∆
(n)l — компоненты линеаризованных тензора напряжений Θ и вектора
индукции ∆:
θ(n)lk = c
∗(n)lkspu
(n)s,p + e
∗(n)lkp ϕ(n)
,p , ∆(n)l = e
∗(n)lsp u(n)
s,p − ε∗(n)lp ϕ(n)
,p (11)
ue(n) =↑
u(n)3 , u
(n)4 = ϕ(n)
— расширенный вектор смещений, ρ(n) — плотность
материала среды, c∗(n)ijkl — тензор упругих постоянных, e
∗(n)kij — тензор пьезоэлектри-
ческих модулей, ε∗(n)ij — тензор диэлектрических проницаемостей:
c∗lksp = Plpδks + νkνsc×lksp, e∗lsp = νselsp, ε∗lp = ε0ν1ν2ν3ν
−2l δlp + βlp (12)
Здесь βkn — константа диэлектрической восприимчивости. Участвующие в пред-ставлении (12) компоненты тензора Кирхгофа Plp, а также упругие константы c×q jlp
зависят как от свойств материала, так и от вида начального напряженного состо-яния среды:
Pl p =1
2cqj lpδqj(ν
2q − 1)− ej l pWj +
1
8δmnδqjcmnq j lp(ν
2q − 1)(ν2
m − 1)
c×qj lp = cqjlp +1
4δmncmnqjlp(ν
2m − 1)
(13)
Выражения для диэлектрических и пьезоэлектрических констант, в рамках сде-ланных предположений о малой величине электрического поля, не изменяются.

Об учете констант III порядка в задачах динамики . . . 29
Для анализа влияния преднапряжений на симметрию кристалла выпишемотличные от нуля упругие, пьезоэлектрические и диэлектрические константыLiNbO3, в следующей форме:
c∗11 = P11 + ν21c×11, c∗12 = ν1ν2c
×12, c∗44 = ν2ν3c
×44, c∗14 = ν1ν2c
×14
c∗22 = P22 + ν22c×11, c∗13 = ν1ν3c
×13, c∗55 = ν1ν3c
×44
c∗33 = P33 + ν23c×33, c∗23 = ν2ν3c
×13, c∗66 = ν1ν2c
×66, c×66 =
(c×11 − c×12
)/2
(14)
e∗15 = ν1e15, e∗24 = ν2e15, e∗31 = ν1e31, e∗32 = ν2e31
e∗33 = ν3e33, e∗21 = v1e22, e∗22 = v2e22
(15)
ε∗11 = ε0ν2ν3ν−11 + β11, ε∗22 = ε0ν1ν3ν
−12 + β11, ε∗33 = ε0ν1ν2ν
−13 + β11 (16)
Из вида представлений (14)–(16) нетрудно заметить, что в рассматриваемом слу-чае (без учета внешних электрических полей) начальное напряженное состояниевлияет на все константы. Участвующий в (14) тензор Кирхгофа P, равно как итензор констант c×lksp остаются симметричными при любой начальной деформации.Возможность изменения класса симметрии определяют начальные деформации поразличным направлениям в константе c∗lksp. Влияние этих деформаций на пьезо-электрические e∗lsp и диэлектрические ε∗lp константы также сводится к увеличениючисла независимых констант, что приводит к изменению класса симметрии.
Применяя к краевым задачам I: (3)–(7), (9), (10) и II: (3)–(6), (8)–(10)преобразование Фурье по координате x1, и подставляя решение в преобразован-ные граничные условия, получим дисперсионные уравнения для волн Гуляева–Блюштейна:
для задачи с открытыми электрическими условиями
∆I =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
l1∗11s101 l1∗12s
102 l111c
11 l112c
12 0 0 0
l1∗21s101 γ l1∗22s
102 γ l121c
11γ l122c
12γ 0 0 −ε0α
l131c11γ l132c
12γ l1∗31s
101 γ l1∗32s
102 γ 0 0 −1
f 131 f 1
32 0 0 −f 231 −f 2
32 0f 1
41 f 142 0 0 −f 2
41 −f 242 0
0 0 l111 l112 −l211σ(2)1 −l212σ
(2)2 0
0 0 l121 l122 −l221σ(2)1 −l222σ
(2)2 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
(17)
для задачи с закрытыми электрическими условиями
∆II =
∣∣∣∣∣∣∣∣∣∣∣∣
l1∗11s101 l1∗12s
102 l111c
11 l112c
12 0 0
l1∗21s101 l1∗22s
102 l121c
11 l122c
12 0 0
f 131 f 1
32 0 0 −f 231 −f 2
32
f 141 f 1
42 0 0 −f 241 −f 2
42
0 0 l111 l112 −l211σ(2)1 −l212σ
(2)2
0 0 l121 l122 −l221σ(2)1 −l222σ
(2)2
∣∣∣∣∣∣∣∣∣∣∣∣
(18)
30 Белянкова Т.И., Лыжов В.А.
в (17), (18) приняты обозначения:
l(n)1k = c
∗(n)44 f
(n)3k + e
∗(n)24 , l
(n)2k = e
∗(n)24 f
(n)3k − ε
∗(n)22 , k = 1, 2
f(n)3k = −
e∗(n)24
(σ
(n)k
)2
− α2e∗(n)15
c∗(n)44
(σ
(n)k
)2
− α2c∗(n)55 − ρ0ω2
, f(n)4k = 1, k = 1, 2
sh0σ(n)p h =
shσ(n)p h
σ(n)p
, sn0p = sh0σ(n)
p h, cnp = chσ(n)
p h
σ(n)k — корни характеристического уравнения
(c∗(n)44 σ2 − α2c
∗(n)55 − ρ0ω
2)(
ε∗(n)22 σ2 − α2ε
∗(n)11
)+
(e∗(n)24 σ2 − α2e
∗(n)15
)2
= 0 (19)
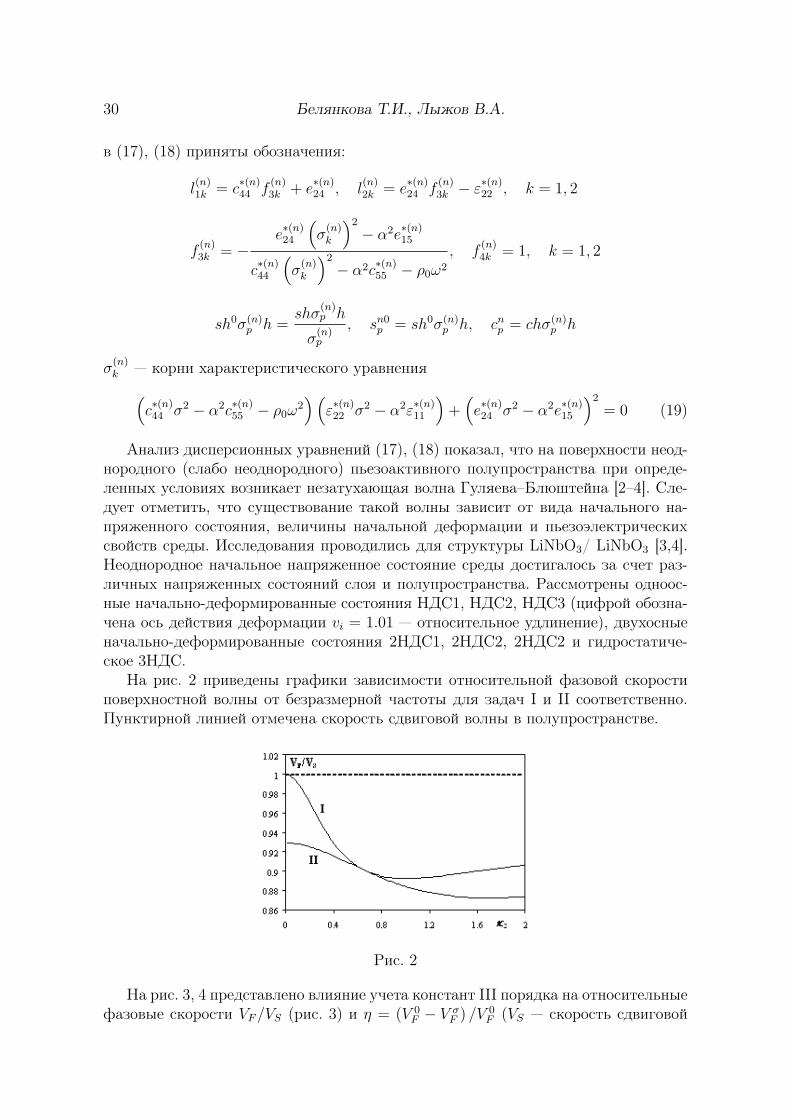
Анализ дисперсионных уравнений (17), (18) показал, что на поверхности неод-нородного (слабо неоднородного) пьезоактивного полупространства при опреде-ленных условиях возникает незатухающая волна Гуляева–Блюштейна [2–4]. Сле-дует отметить, что существование такой волны зависит от вида начального на-пряженного состояния, величины начальной деформации и пьезоэлектрическихсвойств среды. Исследования проводились для структуры LiNbO3/ LiNbO3 [3,4].Неоднородное начальное напряженное состояние среды достигалось за счет раз-личных напряженных состояний слоя и полупространства. Рассмотрены одноос-ные начально-деформированные состояния НДС1, НДС2, НДС3 (цифрой обозна-чена ось действия деформации vi = 1.01 — относительное удлинение), двухосныеначально-деформированные состояния 2НДС1, 2НДС2, 2НДС2 и гидростатиче-ское 3НДС.
На рис. 2 приведены графики зависимости относительной фазовой скоростиповерхностной волны от безразмерной частоты для задач I и II соответственно.Пунктирной линией отмечена скорость сдвиговой волны в полупространстве.
Рис. 2
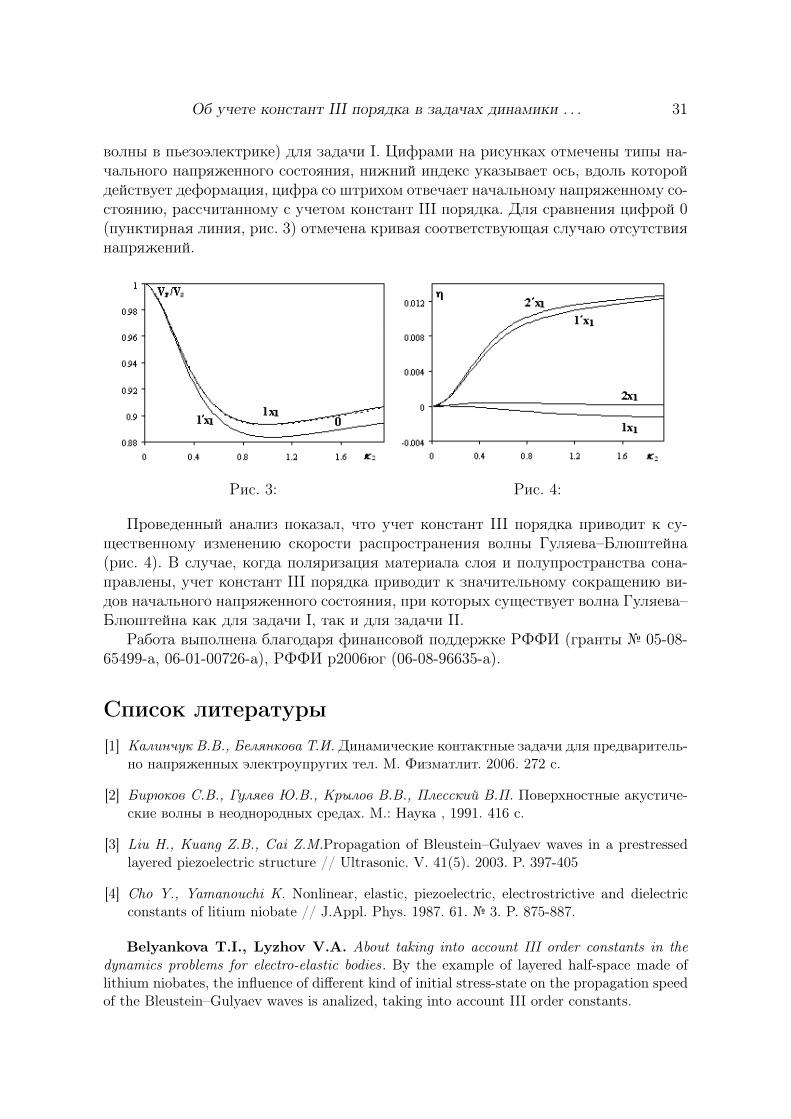
На рис. 3, 4 представлено влияние учета констант III порядка на относительныефазовые скорости VF /VS (рис. 3) и η = (V 0
F − V σF ) /V 0
F (VS — скорость сдвиговой
Об учете констант III порядка в задачах динамики . . . 31
волны в пьезоэлектрике) для задачи I. Цифрами на рисунках отмечены типы на-чального напряженного состояния, нижний индекс указывает ось, вдоль которойдействует деформация, цифра со штрихом отвечает начальному напряженному со-стоянию, рассчитанному с учетом констант III порядка. Для сравнения цифрой 0(пунктирная линия, рис. 3) отмечена кривая соответствующая случаю отсутствиянапряжений.
Рис. 3: Рис. 4:
Проведенный анализ показал, что учет констант III порядка приводит к су-щественному изменению скорости распространения волны Гуляева–Блюштейна(рис. 4). В случае, когда поляризация материала слоя и полупространства сона-правлены, учет констант III порядка приводит к значительному сокращению ви-дов начального напряженного состояния, при которых существует волна Гуляева–Блюштейна как для задачи I, так и для задачи II.
Работа выполнена благодаря финансовой поддержке РФФИ (гранты 05-08-65499-а, 06-01-00726-а), РФФИ р2006юг (06-08-96635-а).
Список литературы[1] Калинчук В.В., Белянкова Т.И. Динамические контактные задачи для предваритель-
но напряженных электроупругих тел. М. Физматлит. 2006. 272 c.
[2] Бирюков С.В., Гуляев Ю.В., Крылов В.В., Плесский В.П. Поверхностные акустиче-ские волны в неоднородных средах. М.: Наука , 1991. 416 с.
[3] Liu H., Kuang Z.B., Cai Z.M.Propagation of Bleustein–Gulyaev waves in a prestressedlayered piezoelectric structure // Ultrasonic. V. 41(5). 2003. P. 397-405
[4] Cho Y., Yamanouchi K. Nonlinear, elastic, piezoelectric, electrostrictive and dielectricconstants of litium niobate // J.Appl. Phys. 1987. 61. 3. P. 875-887.
Belyankova T.I., Lyzhov V.A. About taking into account III order constants in thedynamics problems for electro-elastic bodies. By the example of layered half-space made oflithium niobates, the influence of different kind of initial stress-state on the propagation speedof the Bleustein–Gulyaev waves is analized, taking into account III order constants.

ДВИЖЕНИЕ НАГРУЗКИ С ПОСТОЯННОЙ СКОРОСТЬЮ ПОГРАНИЦЕ ТРЕХМЕРНОГО АКУСТИЧЕСКОГО СЛОЯ
Болгова А. И.Южно-Российский государственный технический университет (НПИ),
Новочеркасск
Задача о движении с постоянной скоростью осциллирующей нагрузки по границеакустического слоя впервые изучалась в [1] в случае действия на дневной поверхно-сти сосредоточенной силы. В работе [2] рассмотрена аналогичная задача для нагрузки,изменяющейся по произвольному закону в произвольной области, и построены асимп-тотические решения, позволяющие вычислить поток энергии, распространяющийся набесконечность. Однако оставались неизученными области, где поток энергии не влияетна суммарный поток энергии. В данной работе на примере задачи, когда нагрузка рас-пределена равномерно в прямоугольнике, дано обоснование построения асимптотическихрешений в этих областях в зависимости от скорости движения нагрузки.
Пусть акустическая среда занимает область Π = |x1| < ∞,|x2| < ∞,0 <x3 <h.По границе x3 = h перемещается с постоянной скоростью v и осциллирует с ча-стотой ω нагрузка. Требуется найти решение дифференциального уравнения
4u =1
c2
∂2u
∂t2, x ∈ Π
при следующих граничных условиях
u(x1, x2, 0) = 0, µ∂u
∂x3
∣∣∣∣∣x3=h
= f(x1 − vt, x2, h)eiωt, |x1| ≤ a1, |x2| ≤ b1.
Рассмотрим установившийся режим колебаний u(y, t) = U(y)eiωt в подвижнойсистеме координат y1 = x1 − vt, y2 = x2, y3 = x3. Переходя к безразмернымвеличинам
x =y1
h, y =
y2
h, z =
y3
h, V (x, y, z) =
U(y)
h,
a =a1
h, b =
b1
h, p =
p1
µ, Ω =
ωh
c,
и, применяя двойное преобразование Фурье по координатам x, y, найдем
V =1
4π2
∞∫
−∞
∞∫
−∞
F (α, γ) sh kz
k ch ke−i(αx+γy) dα dγ + Vo∂,
F (α, γ) =4p sin αa sin γb
αγ, k =
√l2 − (αw + Ω)2
(1)

Движение нагрузки с постоянной скоростью по границе . . . 33
где Vo∂ — однородное решение рассматриваемой граничной задачи с нулевымиграничными условиями.
В работе [2] показано, что Vo∂ при использовании принципа предельного по-глощения (если положить Ωε = Ω− iε, 0 < ε << 1) равно нулю, а значит, задачаимеет единственное решение. Из формулы (1) видно, что подынтегральная функ-ция является аналитической в комплексной области, причем выполняется теоремаФубини. Будем рассматривать такие Ω < Ω1, что существует пересечение плоско-сти ω = α1w + Ω только с первой дисперсионной поверхностью
γ2 + (1− w2)α21 =
c21
1− w2, α1 = α− a1, a1 =
wΩ
1− w2, c2
1 = Ω2 − (1− w2)Ω21.
Тогда выбираяw так, чтобы c21 > 0, получим ограничения на скорость движения:
w∗1 < w < w∗
2, w∗1 =
√Ω2
1 − Ω2/Ω1, w∗2 =
√Ω2
2 − Ω2/Ω2.
Для построения решения в области |y| > b вычислим вначале внутренний ин-теграл из (1) методом контурного интегрирования (МКИ), получив, например:
Jε = − i
2π
F (α, γε(α))
γε(α)sin Ω1ze
−iγε(α)y +1
2π
∞∑
k=1
(−1)k F (α,−iγk)
γk
sin Ωk+1ze−γky,
y > b, Im γε < 0,
и аналогичную формулу при y < −b.В дальнейшем будем вычислять этот интеграл без учета бесконечной суммы.
Тогда заметим, что внешний интеграл легко вычисляется при |x| > a. Однако, длятого, чтобы вычислить его при |x| ≤ a с помощью МКИ, интеграл разбивается надва. Один из полученных интегралов можно вычислить при x > −a, для чего кон-тур замыкается в нижней комплексной полуплоскости. Поскольку подынтеграль-ное выражение имеет точки ветвления, при построении контура интегрированияпроведем разрез [3]. Вычислив теперь эти интегралы МКИ, получим, например:
J1ε = psh γ0b
γ20
e−γ0y +2ip
π
∞∫
0
sin γ0(σ)b
σγ20(σ)
cos γ0(σ)ye−iσ(x+a) dη +
+2p
π
b1∫
a1
sin γ0(α)b
αγ20(α)
cos γ0(α)ye−iα(x+a) dα, y > b, x > −a.
(2)
Заметим, что в формуле (2) введены обозначения:
limε→0
γε = γ0, b1,2 = a1 ± c1
/(1− w2), σ = a1 + iη,
γ0(σ) =√
c21
/(1− w2) + (1− w2)η2 = γ0(σ), γ0(0) = −iγ0, γ0 =
√Ω2
1 − Ω2.
34 Болгова А.И.
Далее, проводя аналогичные вычисления для y > b, x < a и суммируя по-лученное, найдем перемещение, из которого при помощи принципа предельногопоглощения получим решение краевой задачи в области |x| ≤ a, y > b, 0 ≤z ≤ 1. Очевидно, что аналогичным образом можно получить решение в области|x| ≤ a, y < −b, 0 ≤ z ≤ 1, и оно будет иметь аналогичный вид, в котором впоказателе при экспонентах заменить y на |y|.
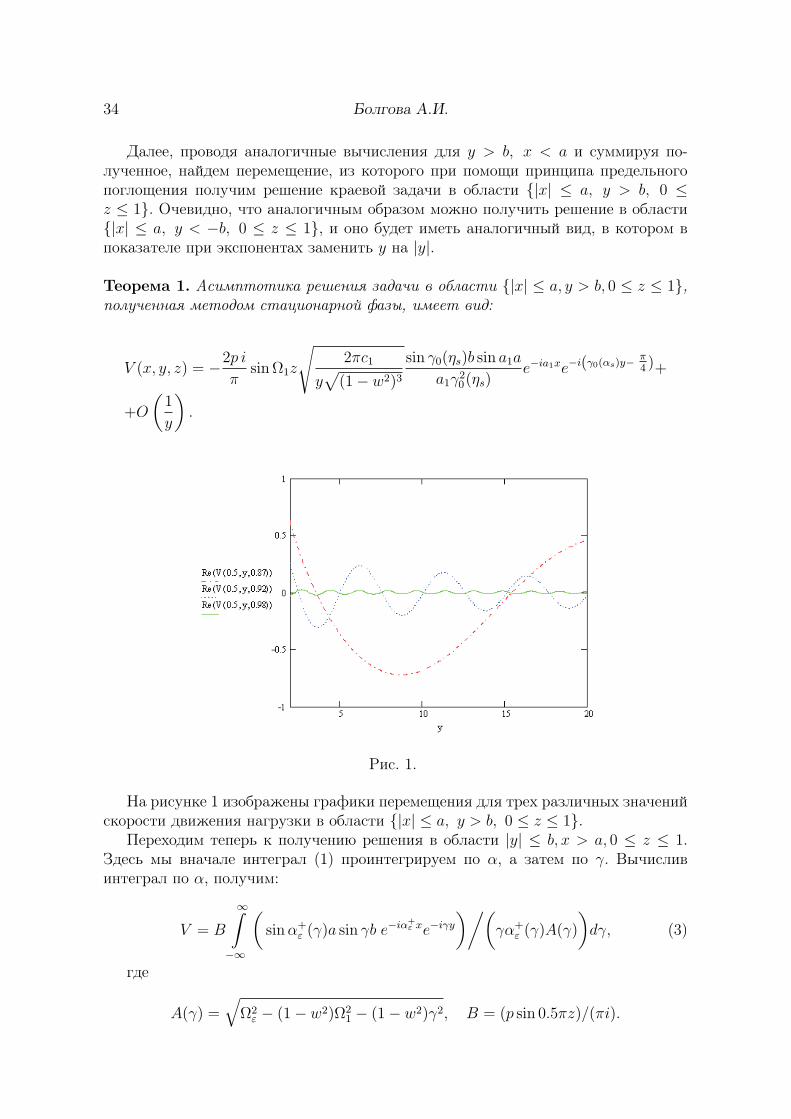
Теорема 1. Асимптотика решения задачи в области |x| ≤ a, y > b, 0 ≤ z ≤ 1,полученная методом стационарной фазы, имеет вид:
V (x, y, z) = −2p i
πsin Ω1z
√2πc1
y√
(1− w2)3
sin γ0(ηs)b sin a1a
a1γ20(ηs)
e−ia1xe−i(γ0(αs)y− π4 )+
+O
(1
y
).
Рис. 1.
На рисунке 1 изображены графики перемещения для трех различных значенийскорости движения нагрузки в области |x| ≤ a, y > b, 0 ≤ z ≤ 1.
Переходим теперь к получению решения в области |y| ≤ b, x > a, 0 ≤ z ≤ 1.Здесь мы вначале интеграл (1) проинтегрируем по α, а затем по γ. Вычисливинтеграл по α, получим:
V = B
∞∫
−∞
(sin α+
ε (γ)a sin γb e−iα+ε xe−iγy
)/(γα+
ε (γ)A(γ)
)dγ, (3)
где
A(γ) =√
Ω2ε − (1− w2)Ω2
1 − (1− w2)γ2, B = (p sin 0.5πz)/(πi).

Движение нагрузки с постоянной скоростью по границе . . . 35
Для проведения интегрирования представим интеграл (4) в виде суммы двух, ана-логично предыдущему:
V 1 = B
∞∫
−∞
sin α+ε (γ)a
γA(γ)α+ε (γ)
e−iα+ε xe−iγ(b−y)dγ, V 2 = B
∞∫
−∞
sin α+ε (γ)a
γA(γ)α+ε (γ)
e−iα+ε xe−iγ(b+y)dγ.
Для убывания решения при x →∞ необходимо, чтобы
Im α+ε < 0, (1− w2)α±ε = wΩε ± A(γ). (4)
И, таким образом, при вычислении интеграла V 1 требуется соблюдать усло-вие (4) и учитывать наличие точки ветвления ξ1 = c1/
√1− w2. Линии смены
аналитичности подынтегральных функций в этом случае определяются из урав-нения:
ση = −Ωε/(1− w2).
Вычисляя интеграл V 1 с учетом последних замечаний, аналогично опреде-ляя V 2 и суммируя найденное, решение представим в виде
V = 2B
∞∫
0
[sin α+(iη)a
α+(iη)e−iα+(iη)x +
sin α−(iη)a
α−(iη)e−iα−(iη)x
]ch ηy
ηA(iη)e−ηbdη−
−2B
ξ1∫
0
[sin α+(γ)a
α+(γ)e−iα+(γ)x +
sin α−(γ)a
α−(γ)e−iα−(γ)x
]cos γy
γA(γ)e−iγbdγ+
+2B
c1
[−sin b1a
b1
e−ib1x +sin b2a
b2
e−ib2x
].
(5)
Заметим, что как полубесконечный, так и конечный интегралы в формуле (5)имеют особенность в точке γ = 0. Можно показать, что собирая эти два интеграла,внеинтегральный член пропадает. Далее получим асимптотики интегралов, вхо-дящих в формулу (5), методом стационарной фазы и тем самым докажем теорему
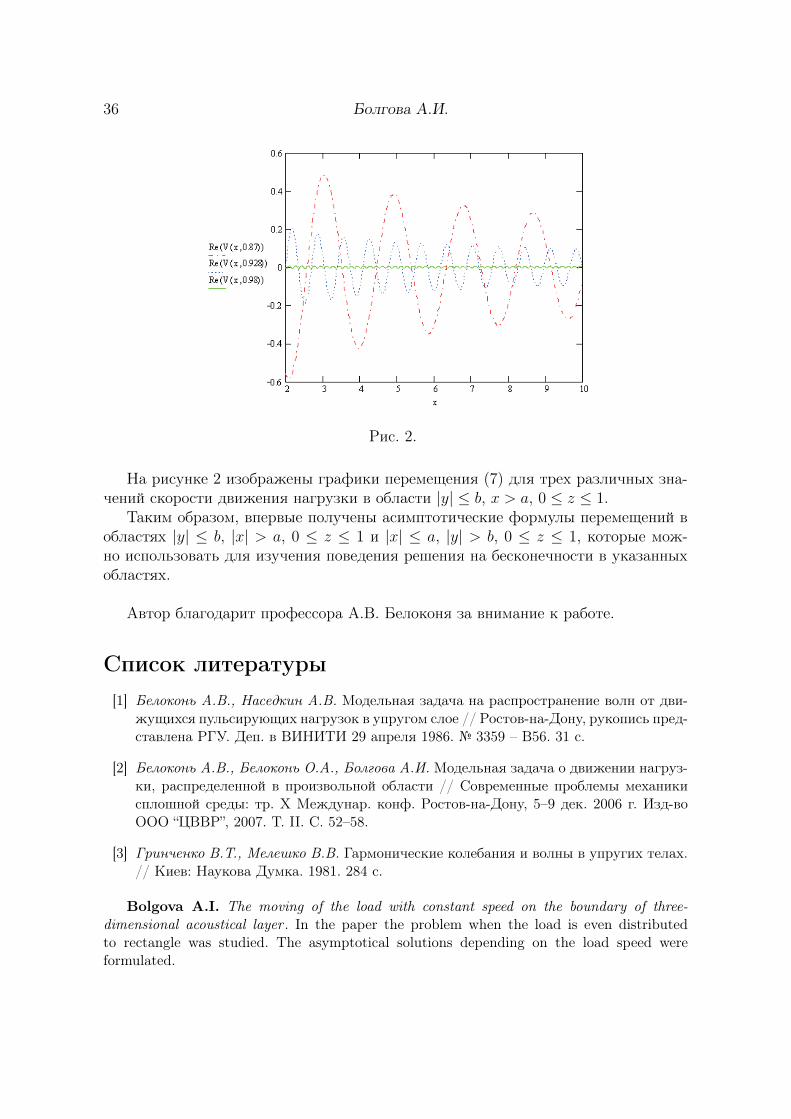
Теорема 2. Асимптотика перемещения (5) в области |y| ≤ b, |x| > a, 0 ≤ z ≤ 1принимает вид:
V = b√
2πc1/x sin(b1a)/(c1b1)e−i(b1x−π/4) + O(1/x). (6)
Замечание: при нахождении асимптотики перемещения в области |y| ≤ b,x < −a, 0 ≤ z ≤ 1 необходимо учитывать, что в показателе экспоненты x < 0.Положив x = −|x|, найдем
V = b√
2πc1/x sin(b2a)/(c1b2)e−i(b2x+π/4) + O(1/x). (7)
Из формул (6), (7) видно, что волна при x > a бежит впереди источника коле-баний, а волна при x < −a сзади источника.
36 Болгова А.И.
Рис. 2.
На рисунке 2 изображены графики перемещения (7) для трех различных зна-чений скорости движения нагрузки в области |y| ≤ b, x > a, 0 ≤ z ≤ 1.
Таким образом, впервые получены асимптотические формулы перемещений вобластях |y| ≤ b, |x| > a, 0 ≤ z ≤ 1 и |x| ≤ a, |y| > b, 0 ≤ z ≤ 1, которые мож-но использовать для изучения поведения решения на бесконечности в указанныхобластях.
Автор благодарит профессора А.В. Белоконя за внимание к работе.
Список литературы[1] Белоконь А.В., Наседкин А.В. Модельная задача на распространение волн от дви-
жущихся пульсирующих нагрузок в упругом слое // Ростов-на-Дону, рукопись пред-ставлена РГУ. Деп. в ВИНИТИ 29 апреля 1986. 3359 – В56. 31 с.
[2] Белоконь А.В., Белоконь О.А., Болгова А.И. Модельная задача о движении нагруз-ки, распределенной в произвольной области // Современные проблемы механикисплошной среды: тр. Х Междунар. конф. Ростов-на-Дону, 5–9 дек. 2006 г. Изд-воООО “ЦВВР”, 2007. Т. II. С. 52–58.
[3] Гринченко В.Т., Мелешко В.В. Гармонические колебания и волны в упругих телах.// Киев: Наукова Думка. 1981. 284 с.
Bolgova A.I. The moving of the load with constant speed on the boundary of three-dimensional acoustical layer . In the paper the problem when the load is even distributedto rectangle was studied. The asymptotical solutions depending on the load speed wereformulated.
ИСПОЛЬЗОВАНИЕ МОДЕЛИ ПУАССОНОВСКОГО ПОТОКАПРИ ИДЕНТИФИКАЦИИ СТАДИЙ ДЕФОРМАЦИИ ПО
ЭНЕРГЕТИЧЕСКИМ И ВРЕМЕННЫМ ПАРАМЕТРАМ АКТААКУСТИЧЕСКОЙ ЭМИССИИ
Буйло С.И.НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону
На разных стадиях деформации проведена экспериментальная оценка спектра, дли-тельности и энергии акта акустической эмиссии (АЭ) с использованием разработанныхнами ранее методов восстановления излученных параметров АЭ. На основе полученныхрезультатов разработан метод идентификации стадий деформации по энергетическим ивременным параметрам акта АЭ. Результаты предложено использовать для повышениядостоверности АЭ метода диагностики предразрушающего состояния.
Нами предложен метод, позволяющий диагностировать и идентифицироватьранние стадии разрушения по положению особых точек сопутствующего акусти-ческого излучения [1–3]. Однако явление акустической эмиссии (АЭ) в принципепозволяет диагностировать и более ранние стадии нагружения а, именно, ста-дии пластической деформации. Для диагностики пластической деформации на-ми предложен и развивается несколько иной подход, позволяющий восстановитьспектральный состав, по нему оценить длительность τa и истинную (излученную)среднюю энергию акта АЭ Ea на разных стадиях деформации и по их значени-ям диагностировать стадии пластической деформации [4]. Наш подход основан натом, что спектр АЭ представляет собой спектр пуассоновского потока короткихупругих импульсов. Вследствие этого удается оценить полную мощность АЭ Wво всей (от 0 до∞) полосе частот по спектральной плотности, измеренной в огра-ниченной от f1 до f2 полосе. Это дает возможность определить полную среднююэнергию, приходящуюся на один акт АЭ путем деления полной мощности на вос-становленное значение интенсивности потока актов АЭ Na.
Дело в том, что данные наших собственных экспериментов, а так же анализрезультатов других исследователей показывают, что у широкого класса материа-лов почти вдоль всей кривой нагружения амплитудные распределения близки кстепенному виду, а временные интервалы следования к экспоненциальной зависи-мости, соответствующей пуассоновской модели явления АЭ.
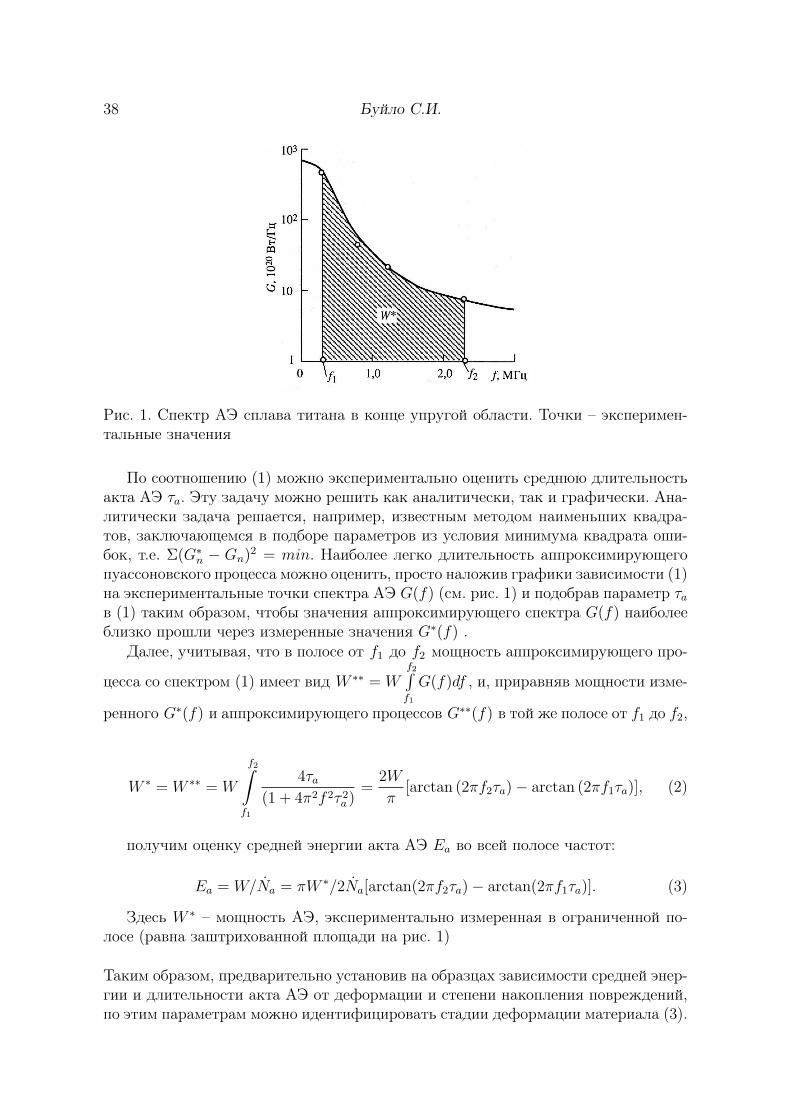
Кратко суть нашего метода состоит в следующем. Известно, что нормирован-ная на единичную площадь спектральная плотность пуассоновского потока актовАЭ длительностью τa во всей (0 −∞) полосе частот имеет следующий вид [2–4](рис. 1):
G(f) = 4τa/(1 + 4π2f 2τ 2a ). (1)
38 Буйло С.И.
Рис. 1. Спектр АЭ сплава титана в конце упругой области. Точки – эксперимен-тальные значения
По соотношению (1) можно экспериментально оценить среднюю длительностьакта АЭ τa. Эту задачу можно решить как аналитически, так и графически. Ана-литически задача решается, например, известным методом наименьших квадра-тов, заключающемся в подборе параметров из условия минимума квадрата оши-бок, т.е. Σ(G∗
n − Gn)2 = min. Наиболее легко длительность аппроксимирующегопуассоновского процесса можно оценить, просто наложив графики зависимости (1)на экспериментальные точки спектра АЭ G(f) (см. рис. 1) и подобрав параметр τa
в (1) таким образом, чтобы значения аппроксимирующего спектра G(f) наиболееблизко прошли через измеренные значения G∗(f) .
Далее, учитывая, что в полосе от f1 до f2 мощность аппроксимирующего про-
цесса со спектром (1) имеет вид W ∗∗ = Wf2∫f1
G(f)df , и, приравняв мощности изме-
ренного G∗(f) и аппроксимирующего процессов G∗∗(f) в той же полосе от f1 до f2,
W ∗ = W ∗∗ = W
f2∫
f1
4τa
(1 + 4π2f 2τ 2a )
=2W
π[arctan (2πf2τa)− arctan (2πf1τa)], (2)
получим оценку средней энергии акта АЭ Ea во всей полосе частот:
Ea = W/Na = πW ∗/2Na[arctan(2πf2τa)− arctan(2πf1τa)]. (3)
Здесь W ∗ – мощность АЭ, экспериментально измеренная в ограниченной по-лосе (равна заштрихованной площади на рис. 1)
Таким образом, предварительно установив на образцах зависимости средней энер-гии и длительности акта АЭ от деформации и степени накопления повреждений,по этим параметрам можно идентифицировать стадии деформации материала (3).

Использование модели пуассоновского потока ... 39
Полученные выше результаты дали возможность экспериментально оценитьпараметры акта АЭ ряда материалов на разных стадиях деформации. Параметрыакта АЭ определялись при растяжении серии стандартных, максимально идентич-ных цилиндрических образцов диаметром 6 мм и длиной рабочей части 75 мм. Экс-периментальные значения спектральной плотности G∗(f) определялись по средне-квадратическому значению сигнала с учетом передаточных характеристик датчи-ков АЭ. Мощность АЭ W ∗ оценивалась по воспринимаемому датчиком давлениюсогласно модели плоской волны.
Для достижения высокой чувствительности в широкой (f1 = 0,1 МГц;f2 = 3,0 МГц) полосе частот, спектр энергии получали, повторяя измерения наразных приемных датчиках. При этом широкую полосу разбивали на несколькочастотных интервалов, и на каждом интервале использовался свой датчик АЭ смаксимальной чувствительностью именно в этом частотном диапазоне. Были ис-пользованы пьезопреобразователи со следующими диапазонами частот: (0,1–0,5);(0,5–1,0); (1,0–1,4); (1,8–2,8) МГц. На каждом частотном интервале данные усред-нялись по результатам испытаний от трех до десяти образцов.
Получено, что при скорости деформации ε = 2 · 104c−1 у стали Fe – 0,002 Cсредняя энергия акта АЭ в конце упругой области Ea = 7, 7 · 10−15 Дж приτa = 9, 3 · 10−7c. На площадке текучести Ea = 1, 8 · 10−15 Дж при τa = 4, 3 · 10−7c.Для стали 95Х18 при деформации ε = 0, 001 средняя энергия акта АЭ Ea == 6, 7 · 10−14 Дж при его длительности τa = 7, 5 · 10−7c. При деформации ε = 0, 002параметры акта АЭ: Ea = 8, 1 · 10−14 Дж при τa = 6, 7 · 10−7c.
Для двухфазного (α + β) сплава титана (Ti - Al - Mo - Si) мартенситногокласса в конце упругой области Ea = 6, 5 · 10−14 Дж при длительности акта АЭτa = 8, 2 · 10−7c. Параметры акта АЭ в области перехода от упругой к пластиче-ской деформации:Ea = 7, 2 · 10−14 Дж; τa = 7, 4 · 10−7c. При увеличении скоростидеформации на порядок, энергия акта АЭ остается практически неизменной принекотором сокращении его длительности.
Эти результаты показывают, что средняя энергия и длительность акта АЭ дей-ствительно связаны со степенью деформации что, в принципе, позволяет их ис-пользование для идентификации стадий деформации твердых тел. Вместе с тем,следует заметить, что диагностика стадий деформации по параметрам акта АЭпредставляет собой достаточно трудоемкую процедуру и предъявляет повышен-ные требования к точности измерения регистрируемых параметров АЭ.
Следует также отметить, что все зарегистрированные нами изменения пара-метров акта АЭ на разных стадиях деформации укладываются по величине при-близительно всего в один порядок и слабо зависят от скорости деформации. Такимобразом, происходит как бы квантование энергии АЭ что, по-видимому, свиде-тельствует об относительном постоянстве микрообъемов релаксации напряженийза счет скачков пластической деформации и о возможном квантовании волн пла-стической деформации в твердых телах.
Результаты работы можно использовать для повышения достоверности методадиагностики предразрушающего состояния по параметрам сопутствующего аку-стического излучения (эмиссии).
40 Буйло С.И.
Работа выполнена при финансовой поддержке Российского фонда фундамен-тальных исследований (проект 06-08-01039а).
Список литературы[1] Буйло С.И. Связь параметров акустической эмиссии развивающихся дефектов со
скоростью деформации и типом напряженного состояния // Современные проблемымеханики сплошной среды. Труды 9-ой Междунар. конф. Ростов-на-Дону. 2006. Т. 1.С. 71–75.
[2] Буйло С.И. Применение метода акустической эмиссии для целей количественнойоценки динамических характеристик структурных преобразований в твердых телах// Труды 1-го Междунар. Симпозиума Multiferroics-2007, Лоо, 5-10 сентября 2007г., Ростов-на-Дону, ИПО ПИ ЮФУ, 2007, С. 44–47.
[3] Буйло С.И. Идентификация стадий процесса дефектообразования по положениюособых точек интегральных параметров восстановленного потока актов акустиче-ской эмиссии // Современные методы и средства неразрушающего контроля и тех-нической диагностики: Материалы 15-ой Междунар. конф. г.ЁЯлта, 1-5 октября2007, Киев: УИЦ НТТ 2007. С. 255–257.
[4] Builo S.I. Diagnostics of Deformational and Fracture Stages Based on IntegralParameters of the Flow of Acoustic Emission Events. // Rus. J. of NondestructiveTesting. 2004. Vol. 40. 8. pp 552–560.
Builo S.I. Use of Poisson model of a flow at identification of stages of deformation onpower and time parameters of the act of acoustic emission. .At different stages of deformationthe experimental estimation of a spectrum, duration and energy of the act of acoustic emission(AE) with use developed by us before methods of restoration of the radiated parameters AEis carried out. On the basis of the received results the method of identification of stages ofdeformation on power and time parameters of the AE act is developed. The results are offeredfor using for increase reliabilities of an AE diagnostic method of pre-destructive stages ofmaterials.
ВЛИЯНИЕ МИНЕРАЛЬНЫХ ДОБАВОК НАФИЗИКО-МЕХАНИЧЕСКИЕ СВОЙСТВА БЕТОНОВ
Буравчук Н.И., Гурьянова О.В.,Окороков Е.П., Павлова Л.Н.
НИИ механики и прикладной математики им. Воровича И.И. Южногофедерального университета, Ростов-на-Дону
Исследовано влияние минеральных добавок — золы уноса и горелых шахтных по-род на физико-механические свойства бетонов. Доказана эффективность использованиятаких добавок в технологии бетона.
Получение строительных материалов с определенными характеристиками ос-новано на силовых взаимодействиях, возникающих в дисперсной системе. Ба-ланс сил связей, формирующих структуру материала, зависит от характеристики свойств исходных веществ, а также от внешних условий: механохимическо-го, химического и других способов регулирования энергетического состояния ифизико-химической активности поверхности применяемых компонентов, их со-отношения в составе смеси, введении химических добавок, приложении внеш-них механических воздействий. Таким образом, общая закономерность созда-ния любого строительного материала с необходимыми свойствами имеет следу-ющий вид: исходное сырье + состав материала + технология = структура →свойства материала, т. е. основа любого строительного материала это исходноесырье. Далее следует состав материала и технология изготовления, которые в со-вокупности формируют его структуру и свойства [1]. Применительно к бетону наего структуру и свойства влияют расход цемента, мелкого и крупного заполните-лей, соотношение между ними, вид и количество добавок, технология получениябетона.
В данной работе рассмотрено влияние минеральных добавок, которые улучша-ют структуру и свойства бетона и способствуют экономии вяжущего. В качестветаких добавок использовали золы сухого отбора (зола-унос) и тонкодисперсныешахтные породы. Гидравлическая активность является наиболее важным свой-ством тонкодисперсных шахтных пород, зол и шлаков ТЭС, обусловливающимвозможность их применения в составе вяжущих веществ и бетонов. Золы и го-релые шахтные породы, содержащие в небольшом количестве свободный оксидкальция, самостоятельно не твердеют. В составе смешанных вяжущих при твер-дении они проявляют пуццолановую активность, т.е. способность при обычныхтемпературах связывать гидроксид кальция с образованием нерастворимых со-единений. Пуццолановой активностью в составе зол и горелых пород обладаютпродукты обжига глин: аморфизованное глинистое вещество типа метакаолинита,смесь аморфных кремнезема и глинозема и алюмосиликатное стекло. Реакционнаяспособность по отношению к гидроксиду кальция у них различна. Обладающийбольшой удельной поверхностью метакаолинит активно реагирует с гидроксидомкальция при обычных температурах с образованием гидросиликатов кальция и
42 Буравчук Н.И., Гурьянова О.В., Окороков Е.П., Павлова Л.Н.
гидрогеленита. Горелая порода состоит в основном из аморфизованного глинисто-го вещества и более интенсивно участвует в связывании гидроксида кальция [2].Влияние пуццоланового эффекта возрастает с увеличением удельной поверхностидобавки. Увеличить удельную поверхность можно путем измельчения.
В процессе измельчения происходит механическая и химическая активация ве-щества, повышается его реакционная способность. При помоле любого веществаэнергия, затрачиваемая на его измельчение, расходуется на разрыв химическихсвязей в кристалле и создание новых поверхностей, на изменение структуры твер-дого тела — его аморфизацию и образование в кристаллах дефектов [3]. На по-верхности частиц золы и горелых пород при измельчении появляются дополни-тельные центры различной природы и силы, которые в зависимости от условиймогут участвовать в различных стадиях адсорбционных и каталитических превра-щений. Это позволяет использовать тонкомолотые минеральные добавки в составесмешанного вяжущего (например, в смеси с цементом, известью, жидким стеклом,доменным гранулированным шлаком и другими связующими). При введении тон-комолотых добавок золы, шахтной породы в состав бетонной смеси изменяютсямногие свойства бетона.
При замене части цемента золой улучшается удобоукладываемость бетоннойсмеси. Введение таких добавок в бетон сказывается на водопотребности и подвиж-ности бетонной смеси. Улучшение удобоукладываемости бетонной смеси связано,во-первых, с увеличением объема вяжущего при введении золы (вяжущее = це-мент + зола), во-вторых, с наличием в золе частиц сферической формы с гладкойостеклованной фактурой поверхности, количество которых тем больше, чем вы-ше дисперсность золы. Чем больше в составе золы остеклованных шарообразныхчастиц, тем больше пластифицирующий эффект золы. В соответствии с пласти-фицирующим действием золы уменьшается количество воды для получения необ-ходимой консистенции бетонной смеси и улучшаются ее показатели: повышаетсяпластичность, однородность и плотность бетонной смеси.
Введение тонкомолотой горелой породы повышает нормальную густоту сме-шанного вяжущего (цемент + добавка молотой породы) и увеличивает водопо-требность этой смеси. Пластифицирующий эффект молотой горелой породы ни-же, чем у золы. В основном это связано с формой, пористостью и шероховатостьюповерхности частиц породы.
Добавки золы и молотой шахтной породы влияют и на процесс структурооб-разования цементного камня, который условно делится на три периода: первона-чальный (индукционный), следующий непосредственно за затворением цементно-го теста водой; второй (коагуляционный) — схватывание и третий — образованиеконденсационно-кристаллической и кристаллической структуры.
Кинетику структурообразования вяжущих веществ при взаимодействии с во-дой в начальный период чаще всего характеризуют изменением пластическойпрочности цементного теста во времени, а в более поздние сроки — непосред-ственно прочностью при сжатии образцов цементного камня.
На рис. 1 приведена кинетика структурообразования цементного камня и зо-лоцементной смеси, в которой 20% цемента по отношению к контролю замене-но золой. Следует отметить, что характер структурообразования золоцементной
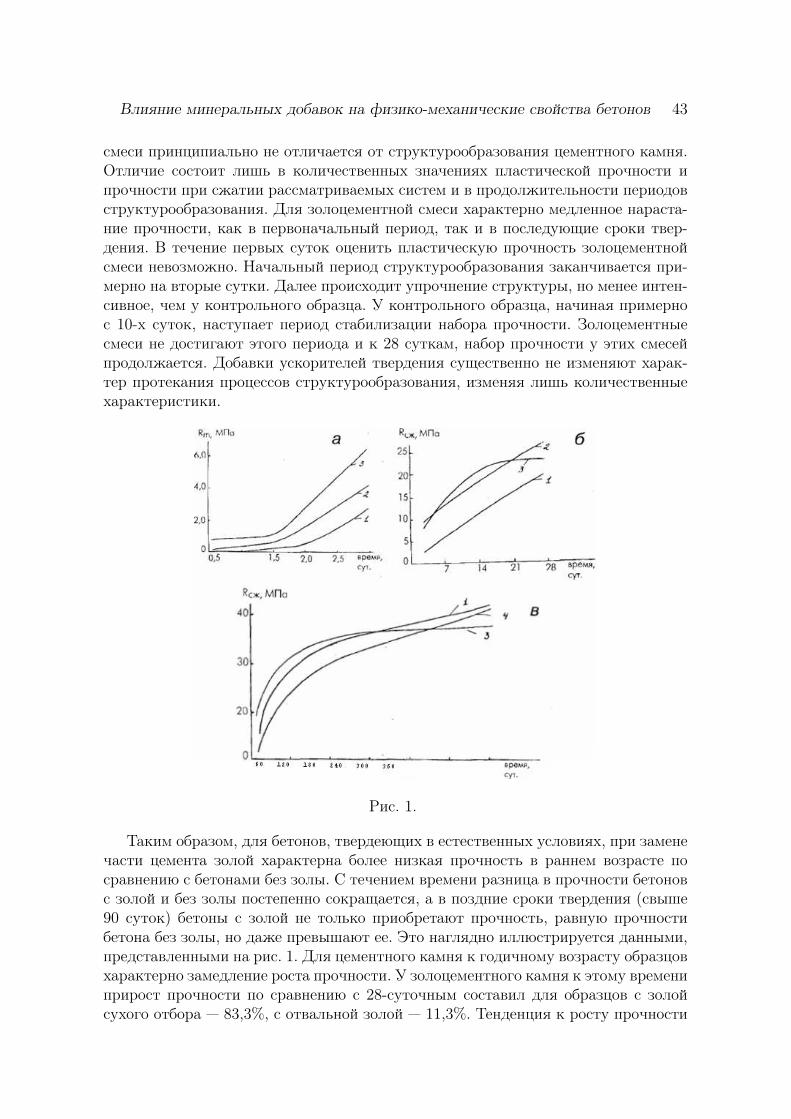
Влияние минеральных добавок на физико-механические свойства бетонов 43
смеси принципиально не отличается от структурообразования цементного камня.Отличие состоит лишь в количественных значениях пластической прочности ипрочности при сжатии рассматриваемых систем и в продолжительности периодовструктурообразования. Для золоцементной смеси характерно медленное нараста-ние прочности, как в первоначальный период, так и в последующие сроки твер-дения. В течение первых суток оценить пластическую прочность золоцементнойсмеси невозможно. Начальный период структурообразования заканчивается при-мерно на вторые сутки. Далее происходит упрочнение структуры, но менее интен-сивное, чем у контрольного образца. У контрольного образца, начиная примернос 10-х суток, наступает период стабилизации набора прочности. Золоцементныесмеси не достигают этого периода и к 28 суткам, набор прочности у этих смесейпродолжается. Добавки ускорителей твердения существенно не изменяют харак-тер протекания процессов структурообразования, изменяя лишь количественныехарактеристики.
Рис. 1.
Таким образом, для бетонов, твердеющих в естественных условиях, при заменечасти цемента золой характерна более низкая прочность в раннем возрасте посравнению с бетонами без золы. С течением времени разница в прочности бетоновс золой и без золы постепенно сокращается, а в поздние сроки твердения (свыше90 суток) бетоны с золой не только приобретают прочность, равную прочностибетона без золы, но даже превышают ее. Это наглядно иллюстрируется данными,представленными на рис. 1. Для цементного камня к годичному возрасту образцовхарактерно замедление роста прочности. У золоцементного камня к этому времениприрост прочности по сравнению с 28-суточным составил для образцов с золойсухого отбора — 83,3%, с отвальной золой — 11,3%. Тенденция к росту прочности
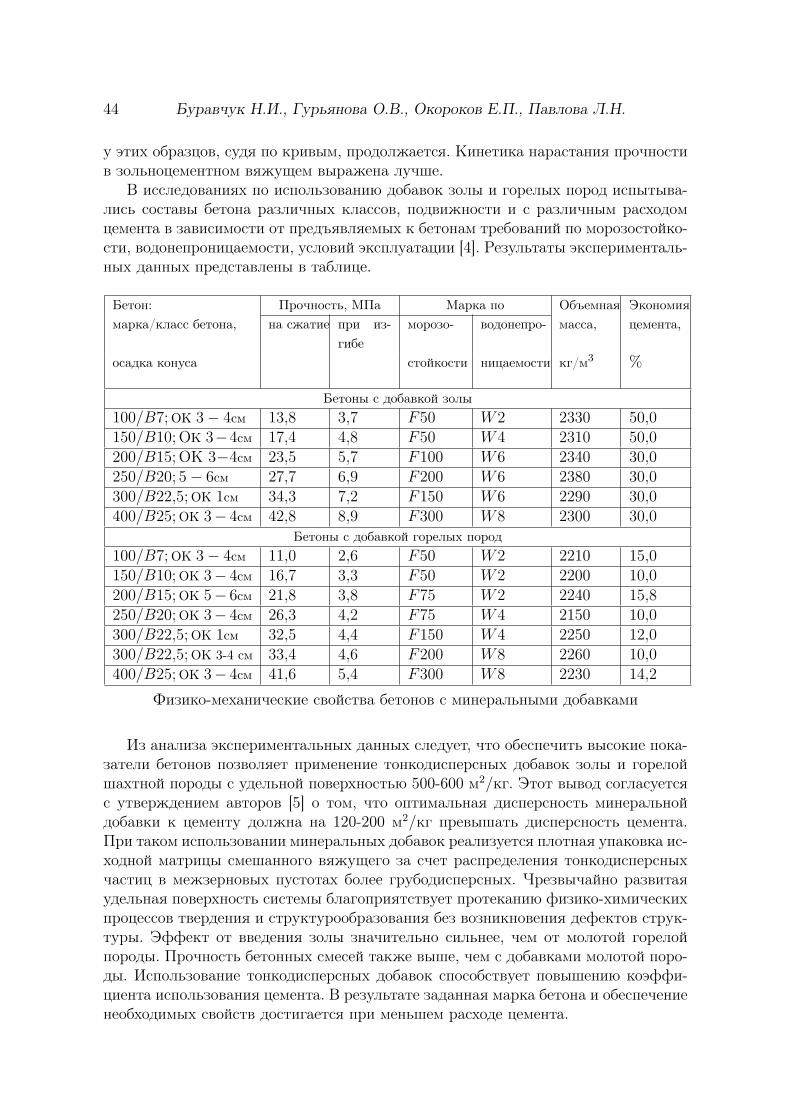
44 Буравчук Н.И., Гурьянова О.В., Окороков Е.П., Павлова Л.Н.
у этих образцов, судя по кривым, продолжается. Кинетика нарастания прочностив зольноцементном вяжущем выражена лучше.
В исследованиях по использованию добавок золы и горелых пород испытыва-лись составы бетона различных классов, подвижности и с различным расходомцемента в зависимости от предъявляемых к бетонам требований по морозостойко-сти, водонепроницаемости, условий эксплуатации [4]. Результаты эксперименталь-ных данных представлены в таблице.
Бетон: Прочность, МПа Марка по Объемная Экономиямарка/класс бетона, на сжатие при из-
гибеморозо- водонепро- масса, цемента,
осадка конуса стойкости ницаемости кг/м3 %
Бетоны с добавкой золы100/B7;ОК 3− 4см 13,8 3,7 F50 W2 2330 50,0150/B10;ОК 3−4см 17,4 4,8 F50 W4 2310 50,0200/B15;ОК 3−4см 23,5 5,7 F100 W6 2340 30,0250/B20; 5− 6см 27,7 6,9 F200 W6 2380 30,0300/B22,5;ОК 1см 34,3 7,2 F150 W6 2290 30,0400/B25;ОК 3− 4см 42,8 8,9 F300 W8 2300 30,0
Бетоны с добавкой горелых пород100/B7;ОК 3− 4см 11,0 2,6 F50 W2 2210 15,0150/B10;ОК 3− 4см 16,7 3,3 F50 W2 2200 10,0200/B15;ОК 5− 6см 21,8 3,8 F75 W2 2240 15,8250/B20;ОК 3− 4см 26,3 4,2 F75 W4 2150 10,0300/B22,5;ОК 1см 32,5 4,4 F150 W4 2250 12,0300/B22,5;ОК 3-4 см 33,4 4,6 F200 W8 2260 10,0400/B25;ОК 3− 4см 41,6 5,4 F300 W8 2230 14,2
Физико-механические свойства бетонов с минеральными добавками
Из анализа экспериментальных данных следует, что обеспечить высокие пока-затели бетонов позволяет применение тонкодисперсных добавок золы и горелойшахтной породы с удельной поверхностью 500-600 м2/кг. Этот вывод согласуетсяс утверждением авторов [5] о том, что оптимальная дисперсность минеральнойдобавки к цементу должна на 120-200 м2/кг превышать дисперсность цемента.При таком использовании минеральных добавок реализуется плотная упаковка ис-ходной матрицы смешанного вяжущего за счет распределения тонкодисперсныхчастиц в межзерновых пустотах более грубодисперсных. Чрезвычайно развитаяудельная поверхность системы благоприятствует протеканию физико-химическихпроцессов твердения и структурообразования без возникновения дефектов струк-туры. Эффект от введения золы значительно сильнее, чем от молотой горелойпороды. Прочность бетонных смесей также выше, чем с добавками молотой поро-ды. Использование тонкодисперсных добавок способствует повышению коэффи-циента использования цемента. В результате заданная марка бетона и обеспечениенеобходимых свойств достигается при меньшем расходе цемента.
Влияние минеральных добавок на физико-механические свойства бетонов 45
Основными факторами, положительно влияющими на морозостойкость и водо-непроницаемость бетонов с исследуемыми добавками, являются: уменьшение водо-цементного отношения, повышение плотности бетона, снижение водопоглощения,“самозалечивание” трещин при испытаниях. Это связано с появлением дополни-тельного количества новообразований за счет повышения степени использованияцемента в присутствии тонкодисперсных добавок пуццоланового типа. Эти допол-нительные гидратные соединения кальматируют микротрещины и поры. В при-сутствии в бетонах исследуемых добавок улучшается формирование структурыгидратирующегося цемента, происходит рост удельной поверхности новообразова-ний, увеличивается число контактов силовых взаимодействий, повышается плот-ность структуры конгломерата.
Список литературы[1] Гладков Д.И., Сулейманова Л.А. Общая закономерность создания строительных ма-
териалов с требуемыми свойствами //“Современные проблемы строительного мате-риаловедения”. Материалы седьмых академических чтений РААСН. Белгород, 2001.Ч. 1. С. 77—80.
[2] Кузьмина В.П. Механоактивация цементов. //Строит. материалы. 2006. 7. Прило-жение к журналу “Строительные материалы”. 5. 2006. “Technology”. С. 7–9.
[3] Будницкий В.М., Бражников В.Ф., Мелентьев С.А., Буравчук Н.И., Курочка П.Н.Минеральные добавки из горелых пород и зол для вяжущих и бетонов. // Изв. вузов,Сев.-Кавк. регион. техн. науки, 1998. 4. С. 70–74.
[4] Буравчук Н.И., Будницкий В.М., Бражников В.Ф., Мелентьев С.А. Ресурсосбере-жение в технологии вяжущих и бетонов. Ростов-на-Дону. 1999. 176 с.
[5] Величко Е.Г., Белякова Ж.С. Физико-химические и методологические основы полу-чения многокомпонентных систем оптимизационного состава// Строит. материалы.1996. 3. С. 27–30.
Buravchuk N.I., Gurjanova O.V., Okorokov E.P., Pavlova L.N. Effect of mineralcomponents on physicomechanical properts of betons. Act of mineral additives — ash offlue dust and burnt mine mucks on physicomechanical properties of betons is investigated.Efficiency of use of such additives in production engineering of beton proved.

ОПРЕДЕЛЕНИЕ ПОЛНОГО НАБОРА УПРУГИХ ПОСТОЯННЫХПОЛИМЕРКОМПОЗИТНЫХ И ПЬЕЗОКОМПОЗИТНЫХ
МАТЕРИАЛОВ НА ОСНОВЕ ЧАСТОТНОГО ЗОНДИРОВАНИЯ
Бычков А.А.∗, Соловьев А.Н.∗∗,Рожков Е.В.∗, Шевцов С.Н.∗∗∗
∗ Южный федеральный университет, Ростов-на-Дону∗∗ Донской государственный технический университет, Ростов-на-Дону
∗∗∗ Южный научный центр РАН, Ростов-на-Дону
Разработан метод определения механических свойств однородных и функциональнонеоднородных анизотропных упругих и электроупругих тел, основанный на миними-зации функционала невязки между измеренными некоторыми динамическими харак-теристиками (набор собственных частот, граничное поле смещений при координатноми частотном позиционировании) и вычисленными с помощью МКЭ. Разработано про-граммное обеспечение, реализующее предложенный метод, приведены численные при-меры его использования в качестве CAE — поддержки механических испытаний поли-меркомпозитных материалов, полученных способом намотки стеклонитей с эпоксиднымсвязующим.
1. Введение. Задача определения характеристик механических свойств мате-риалов, входящих в определяющие соотношения не теряет своей актуальности всвязи с использованием новых материалов и применением композитных материа-лов в конструкционных элементах, размеры и формы которых не позволяют про-вести стандартные испытания. Одной из широко применяемых в последнее времяметодик исследования, является сравнительный анализ поля смещений [1, 2], соб-ственных частот и собственных форм, полученных их экспериментальных данныхи из численного эксперимента, с последовательным уточнением последних с по-мощью итерационных методов [3]–[9] и генетических алгоритмов [10]–[14]. Такогороды дополнительная информация применяется при решении обратных коэффи-циентных задач при для неоднородных тел [15, 16].
2. Натурный эксперимент. Рассматривается лонжерон лопасти несущеговинта вертолета из полимеркомпозитного материала, полученного способом на-мотки стеклонитей в эпоксидном связующем. На основе ряда статических испы-таний [17] получены матрица упругих модулей этого материала
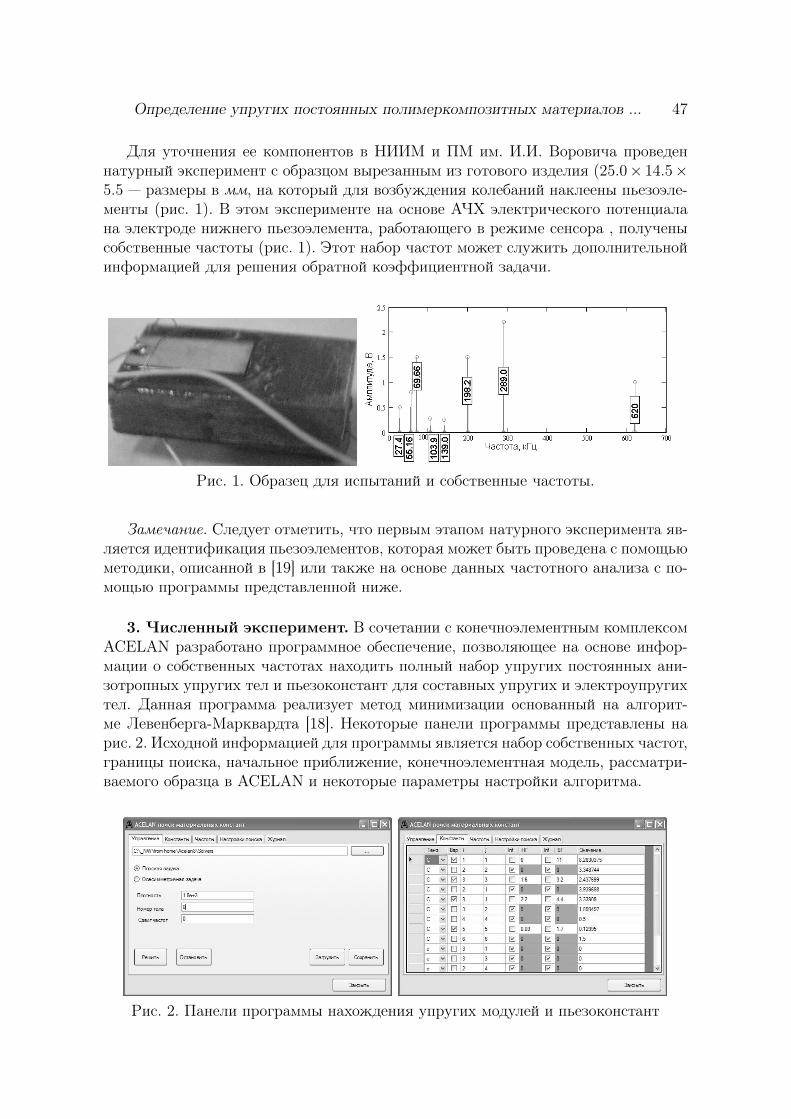
Определение упругих постоянных полимеркомпозитных материалов ... 47
Для уточнения ее компонентов в НИИМ и ПМ им. И.И. Воровича проведеннатурный эксперимент с образцом вырезанным из готового изделия (25.0× 14.5×5.5 — размеры в мм, на который для возбуждения колебаний наклеены пьезоэле-менты (рис. 1). В этом эксперименте на основе АЧХ электрического потенциалана электроде нижнего пьезоэлемента, работающего в режиме сенсора , полученысобственные частоты (рис. 1). Этот набор частот может служить дополнительнойинформацией для решения обратной коэффициентной задачи.
Рис. 1. Образец для испытаний и собственные частоты.
Замечание. Следует отметить, что первым этапом натурного эксперимента яв-ляется идентификация пьезоэлементов, которая может быть проведена с помощьюметодики, описанной в [19] или также на основе данных частотного анализа с по-мощью программы представленной ниже.
3. Численный эксперимент. В сочетании с конечноэлементным комплексомACELAN разработано программное обеспечение, позволяющее на основе инфор-мации о собственных частотах находить полный набор упругих постоянных ани-зотропных упругих тел и пьезоконстант для составных упругих и электроупругихтел. Данная программа реализует метод минимизации основанный на алгорит-ме Левенберга-Марквардта [18]. Некоторые панели программы представлены нарис. 2. Исходной информацией для программы является набор собственных частот,границы поиска, начальное приближение, конечноэлементная модель, рассматри-ваемого образца в ACELAN и некоторые параметры настройки алгоритма.
Рис. 2. Панели программы нахождения упругих модулей и пьезоконстант
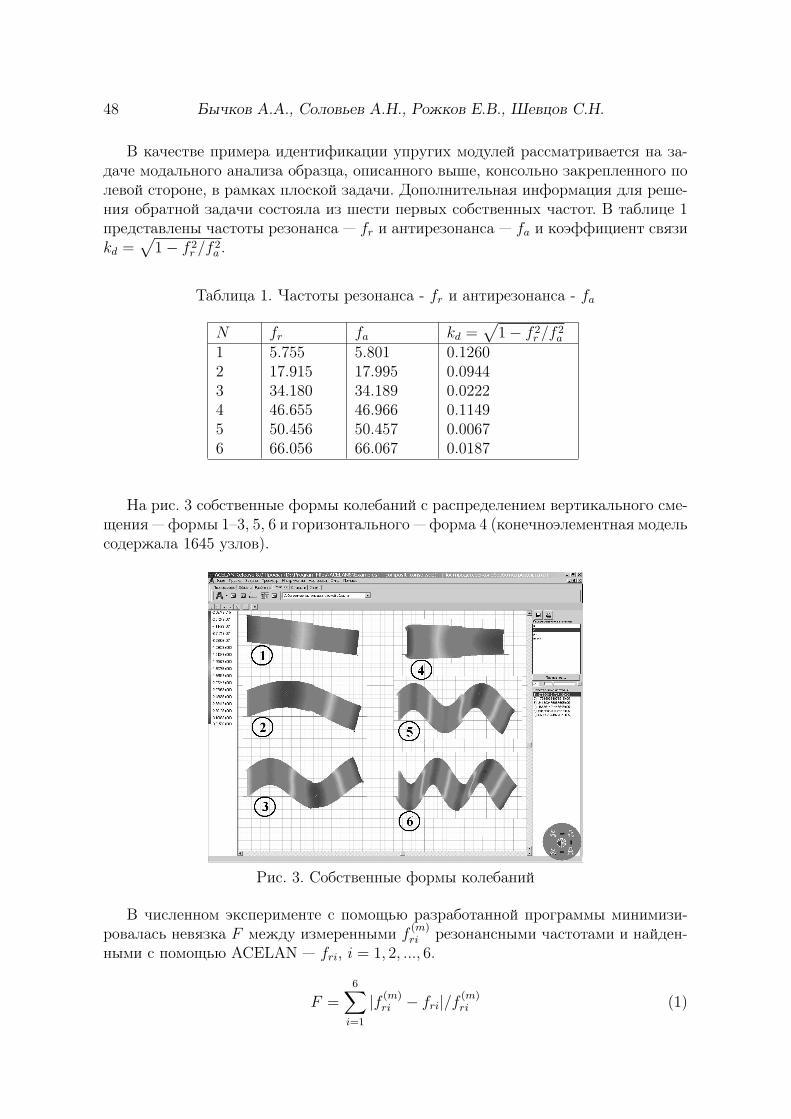
48 Бычков А.А., Соловьев А.Н., Рожков Е.В., Шевцов С.Н.
В качестве примера идентификации упругих модулей рассматривается на за-даче модального анализа образца, описанного выше, консольно закрепленного полевой стороне, в рамках плоской задачи. Дополнительная информация для реше-ния обратной задачи состояла из шести первых собственных частот. В таблице 1представлены частоты резонанса — fr и антирезонанса — fa и коэффициент связиkd =
√1− f 2
r /f 2a .
Таблица 1. Частоты резонанса - fr и антирезонанса - fa
N fr fa kd =√
1− f 2r /f 2
a
123456
5.75517.91534.18046.65550.45666.056
5.80117.99534.18946.96650.45766.067
0.12600.09440.02220.11490.00670.0187
На рис. 3 собственные формы колебаний с распределением вертикального сме-щения — формы 1–3, 5, 6 и горизонтального — форма 4 (конечноэлементная модельсодержала 1645 узлов).
Рис. 3. Собственные формы колебаний
В численном эксперименте с помощью разработанной программы минимизи-ровалась невязка F между измеренными f
(m)ri резонансными частотами и найден-
ными с помощью ACELAN — fri, i = 1, 2, ..., 6.
F =6∑
i=1
|f (m)ri − fri|/f (m)
ri (1)
Определение упругих постоянных полимеркомпозитных материалов ... 49
В качестве измеренных частот был взят набор соответствующий матрице С изп. 2., область поиска определялась точностью некоторых статических испытаний исоставляла [Сb,Сe]=С±0.3С. В качестве начального приближения предполагает-ся брать величины измеренные в статических испытаниях, в данном примере длямодулей c11, c33, c13, c55 — было взято 7, 2, 3, 0.1 (×1010 Н/м2 здесь и далее) — со-ответственно. При этом процесс идентификации модулей состоял из двух этапов.В начале параметр ε, отвечающий за длину шага поиска был выбран ε = 1.0×10−5,и в результате 41 вызова решателя ACELAN были найдены значения модулей:8.283, 2.437, 3.339, 0.1299 — соответственно. При этом погрешность по сравне-нию с точными значениями составляет 1.1%, 1.0%, 0.6%, 0.07%. На втором шагев качестве начального приближения были взяты значения найденные на первомэтапе, параметр ε = 1.0 × 10−7 и после 20 вызовов решателя модального анализаACELAN найденные значения модулей составили 8.389, 2.425, 3.369, 1.30, при этомпогрешность в их нахождении составляет менее процента.
3. Заключение. При численной реализации аналогичных подходов, напри-мер основанных на генетическом алгоритме [20], основное время расчета связанос многократным вызовом решателя прямой задачи. Таким образом предложенныйметод и его программная реализация определения механических свойств упругихтел является весьма эффективными, если известно некоторое начальное прибли-жения искомых характеристик.
Работа выполнена при частичной поддержке РФФИ (гранты 05-01-00690, 05-01-00734, 06-01-08041-ОФИ, 07-08-12193, 07-08-13589).
Список литературы[1] Amiot, F., Hild, F., Roger, J.P. Identification of elastic property and loading fields from
full-field displacement measurements. International Journal of Solids and Structures,2006, V. 44, pp. 2863-2887.
[2] S. Kim, K.L. Kreider. Parameter identification for nonlinear elastic and viscoelasticplates. Applied Numerical Mathematics, 2006, V. 56, pp. 1538-1554.
[3] Akiko Yaoita, Tadaharu Adachi, Akihiko Yamaji. Determination of elastic moduli for aspherical specimen by resonant ultrasound spectroscopy. - NDT&E International, 2005,V. 38, pp. 554-560.
[4] Tom Lauwagiea, Hugo Solb, Gert Roebbenc, Ward Heylena, Yinming Shib, Omer Van derBiestc. Mixed numerical-experimental identification of elastic properties of orthotropicmetal plates. NDT&E International, 2003, V. 36, pp. 487-495.
[5] C. M. Mota Soares, M. Moreira de Freitas and A. L. Araujo P. Pedersen. Identificationof material properties of composite plate specimens. Composite Structures, 1993, V. 25,pp. 277-285.
[6] A.L. Araujo, C.M. Mota Soares, J. Herskovits, P. Pedersen. Development of a finiteelement model for the identification of mechanical and piezoelectric properties through
50 Бычков А.А., Соловьев А.Н., Рожков Е.В., Шевцов С.Н.
gradient optimisation and experimental vibration data. Composite Structures 58 (2002)307-318.
[7] A.L. Araujo, C.M. Mota Soares, M.J. Moreira de Freitas, P. Pedersen, J. Herskovits.Combined numerical-experimental model for the identification of mechanical propertiesof laminated structures. - Composite Structures, 2000, V. 50, pp. 363-372.
[8] Marco Matter, Thomas Gmuur, Joel Cugnoni, Alain Schorderet. Improved modalcharacterization of the constitutive parameters in multilayered plates. CompositesScience and Technology, 2007, V. 67, pp. 1121–1131.
[9] C.R. Lee and T.Y. Kam. Identification of mechanical properties of elastically restrainedlaminated composite plates using vibration data. - Journal of Sound and Vibration, 2006,V. 295, pp. 999-1016.
[10] Akiko Yaoita, Tadaharu Adachi, Akihiko Yamaji. Determination of elastic moduli for aspherical specimen by resonant ultrasound spectroscopy. NDT&E International, 2005,V. 38, pp. 554-560.
[11] M. Shakeri, A. Alibiglou and M. Abouhamze. Stacking Sequence Optimization ofLaminated Cylindrical Panels Using a Genetic Algorithm and Neural Networks. 2006.Proceedings of the Eighth International Conference on Computational StructuresTechnology, B.H.V. Topping, G. Montero and R. Montenegro, (Editors), Civil-CompPress, Stirlingshire, Scotland, paper 273, 2006.
[12] A.E. Charalampakis and V.K. Koumousis. Parameter Estimation of Bouc-WenHysteretic Systems Using a Sawtooth Genetic Algorithm. 2006. Proceedings of the FifthInternational Conference on Engineering Computational technology, B.H.V. Topping, G.Montero and R. Montenegro, (Editors), Civil-Comp Press, Stirlingshire, Scotland, paper195, 2006.
[13] X.H. Lin, Y.L. Kang, Q.H. Qin, D.H. Fu. Identification of interfacial parameters ina particle reinforced metal matrix composite Al6061-10%Al2O3 by hybrid method andgenetic algorithm. - Computational Materials Science, 2005, V. 32, pp. 47–56.
[14] J. Cugnoni, Th. Gmur, A. Schorderet. Identification by modal analysis of compositestructures modelled with FSDT and HSDT laminated shell finite elements. Composites:Part A, 2004, V. 35, pp. 977–987.
[15] Ватулян А.О., Соловьев А.Н. Об итерационном подходе в обратных задачах теорииупругости. Экологический вестник научных центров ЧЭС 2006, 1. С. 23–29.
[16] Бычков А.А. Об определении функционально неоднородных свойств упругих ма-териалов. Современные проблемы механики сплошной среды. Труды X Междуна-родной конференции, г. Ростов-на-Дону, 5–9 декабря 2006 г. Ростов-на-Дону: Изд-воООО ЦВВР 2007. Т. 2. С. 110–115.
[17] Шевцов С.Н., Соловьев А.Н., Акопьян В.А., Аксенов В.Н., Бычков А.А. Несущиеполимеркомпозитные конструкции в авиастроении. Идентификация механическихсвойств и разработка интеллектуальных систем управления // Труды Южного на-учного центра Российской академии наук. Ростов-на-Дону: Изд-во ЮНЦ РАН, 2007.С. 149–179. ISSN 1993–6621. ISBN 978-5-902982-19-7.

Определение упругих постоянных полимеркомпозитных материалов ... 51
[18] Документация Minpack. http://www.netlib.org/minpack/.
[19] В.А. Акопьян, Е.В. Рожков, А.Н.Соловьев, С.Н. Шевцов Определение полногонабора совместимых материальных констант пьезокерамики - Приборостроение исредства автоматизации: Энциклопедический справочник. М.: Научтехлитиздат.,2006, 1. С. 31–37.
[20] Баранов И.В., Соловьев А.Н., Стрельникова А.В. Об идентификации свойств поли-меркомпозитных и пьезоэлектрических материалов на основе динамических испы-таний и генетических алгоритмов. // Современные проблемы механики сплошнойсреды. Труды X Международной конференции, г. Ростов-на-Дону, 5–9 декабря 2006г. Ростов-на-Дону: Изд-во ООО ЦВВР 2006. Т. 1. С. 36–40.
Bychkov A.A., Soloviev A.N., Rogkov E.V., Shevzov S.N. Definition of thefull set of elastic constants polymercomposite and piezocomposite materials on the basis offrequency analysis. The method of definition of mechanical properties of the homogeneous andfunctionally non-uniform anisotropic elastic and electroelastic bodies is developed, based onminimization функционала are nonviscous between measured some dynamic characteristics(a set of natural frequencies, a boundary field of displacement at coordinate and frequencypositioning) and calculated with help FEM. The software realizing the offered method isdeveloped, numerical examples of its application for CAE — supports of mechanical testspolymercomposite the materials received by a way of winding fiberglass with epoxy bindingare presented.

ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ ПРОЦЕССА ПЕРЕНОСАПРИМЕСЕЙ ЭЛЕКТРИЧЕСКИМ ПОЛЕМ В КАНАЛЕ
ПРИ НАЛИЧИИ ВИБРАЦИИ
Глушко Н.В., Ширяева Е.В.Южный федеральный университет, Ростов-на-Дону
Численными методами изучена задача о поведении вязкой несжимаемой многоком-понентной жидкости под действием внешнего электрического поля. Предполагается, чтожидкость состоит из растворителя и примесей, концентрации которых малы по сравне-нию с концентрацией растворителя. Такая задача имеет важное прикладное значениев практике электрофореза — методе разделения смеси на составные компоненты припомощи электрического поля. В случае препаративного электрофореза перенос приме-сей электрическим полем вызывает сильное индуцированное течение жидкости в целом,которое искажает картину разделения смеси.
В работе для широкого набора параметров проведен обширный вычислительный экс-перимент по изучению движения примесей в различных условиях при наличии вынуж-дающих внешних сил (электрических, гравитационных, вибрационных). Для расчетовиспользованы явные и неявные конечно-разностные схемы и реализован эффективныйалгоритм решения эллиптических краевых задач для определение давления и потенци-ала электрического поля. Детально изучено движение двух примесей навстречу другдругу в неподвижном и вибрирующем контейнере. В частности, показано, что в неко-торых случаях вибрация существенно искажает процесс разделения смеси на отдельныекомпоненты.
1. Постановка задачи. Процесс движения многокомпонентной вязкой несжи-маемой жидкости под действием электрического и гравитационного полей приналичии вибрации контейнера с жидкостью описывается уравнениями (в безраз-мерных переменных) [1, 2]:
dv
dt= −∇p + µ∆v + (g + Amω2 cos ωt)
r∑
`=1
β`c`, div v = 0,d
dt=
∂
∂t+ v · ∇,
dc`
dt+ div i` = 0, i` = −ε|µ`|∇c` − µ`c`∇ϕ, div(s∇ϕ) = 0, s = 1 +
r∑
`=1
α`c`.
Здесь v — скорость, p — давление, ϕ — потенциал электрического поля, c`, i`,µ`, ε|µ`| — концентрация, плотность потока, электрофоретическая подвижность икоэффициент диффузии `-ой примеси, r — количество примесей, s > 0 — прово-димость смеси, µ — кинематическая вязкость смеси в целом, β` — коэффициентконцентрационного сжатия (β` > 0 соответствует легкой примеси, β` < 0 — тяже-лой примеси), α` — коэффициент влияния примеси на проводимость смеси, g, m —единичные векторы, характеризующие направление поля тяжести и направлениевибрации, ω, A — частота и амплитуда вибрации.
Граница прямоугольного контейнера D = 0 < x < a, 0 < z < h, заполнен-ного жидкостью, считается твердой и непроницаема для жидкости и примесей,
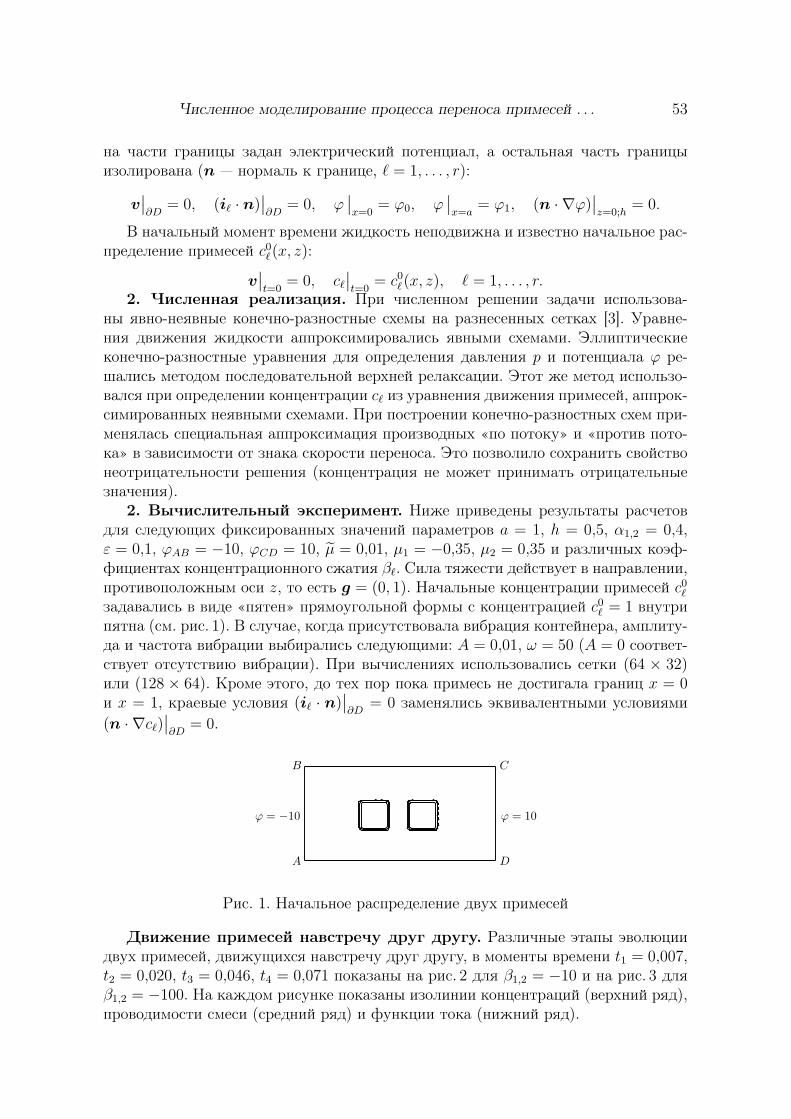
Численное моделирование процесса переноса примесей . . . 53
на части границы задан электрический потенциал, а остальная часть границыизолирована (n — нормаль к границе, ` = 1, . . . , r):
v∣∣∂D
= 0, (i` · n)∣∣∂D
= 0, ϕ∣∣x=0
= ϕ0, ϕ∣∣x=a
= ϕ1, (n · ∇ϕ)∣∣z=0;h
= 0.
В начальный момент времени жидкость неподвижна и известно начальное рас-пределение примесей c0
`(x, z):
v∣∣t=0
= 0, c`
∣∣t=0
= c0`(x, z), ` = 1, . . . , r.
2. Численная реализация. При численном решении задачи использова-ны явно-неявные конечно-разностные схемы на разнесенных сетках [3]. Уравне-ния движения жидкости аппроксимировались явными схемами. Эллиптическиеконечно-разностные уравнения для определения давления p и потенциала ϕ ре-шались методом последовательной верхней релаксации. Этот же метод использо-вался при определении концентрации c` из уравнения движения примесей, аппрок-симированных неявными схемами. При построении конечно-разностных схем при-менялась специальная аппроксимация производных «по потоку» и «против пото-ка» в зависимости от знака скорости переноса. Это позволило сохранить свойствонеотрицательности решения (концентрация не может принимать отрицательныезначения).
2. Вычислительный эксперимент. Ниже приведены результаты расчетовдля следующих фиксированных значений параметров a = 1, h = 0,5, α1,2 = 0,4,ε = 0,1, ϕAB = −10, ϕCD = 10, µ = 0,01, µ1 = −0,35, µ2 = 0,35 и различных коэф-фициентах концентрационного сжатия β`. Сила тяжести действует в направлении,противоположным оси z, то есть g = (0, 1). Начальные концентрации примесей c0
`
задавались в виде «пятен» прямоугольной формы с концентрацией c0` = 1 внутри
пятна (см. рис. 1). В случае, когда присутствовала вибрация контейнера, амплиту-да и частота вибрации выбирались следующими: A = 0,01, ω = 50 (A = 0 соответ-ствует отсутствию вибрации). При вычислениях использовались сетки (64 × 32)или (128 × 64). Кроме этого, до тех пор пока примесь не достигала границ x = 0и x = 1, краевые условия (i` · n)
∣∣∂D
= 0 заменялись эквивалентными условиями(n · ∇c`)
∣∣∂D
= 0.
A
B C
D
ϕ = −10 ϕ = 10
Рис. 1. Начальное распределение двух примесей
Движение примесей навстречу друг другу. Различные этапы эволюциидвух примесей, движущихся навстречу друг другу, в моменты времени t1 = 0,007,t2 = 0,020, t3 = 0,046, t4 = 0,071 показаны на рис. 2 для β1,2 = −10 и на рис. 3 дляβ1,2 = −100. На каждом рисунке показаны изолинии концентраций (верхний ряд),проводимости смеси (средний ряд) и функции тока (нижний ряд).
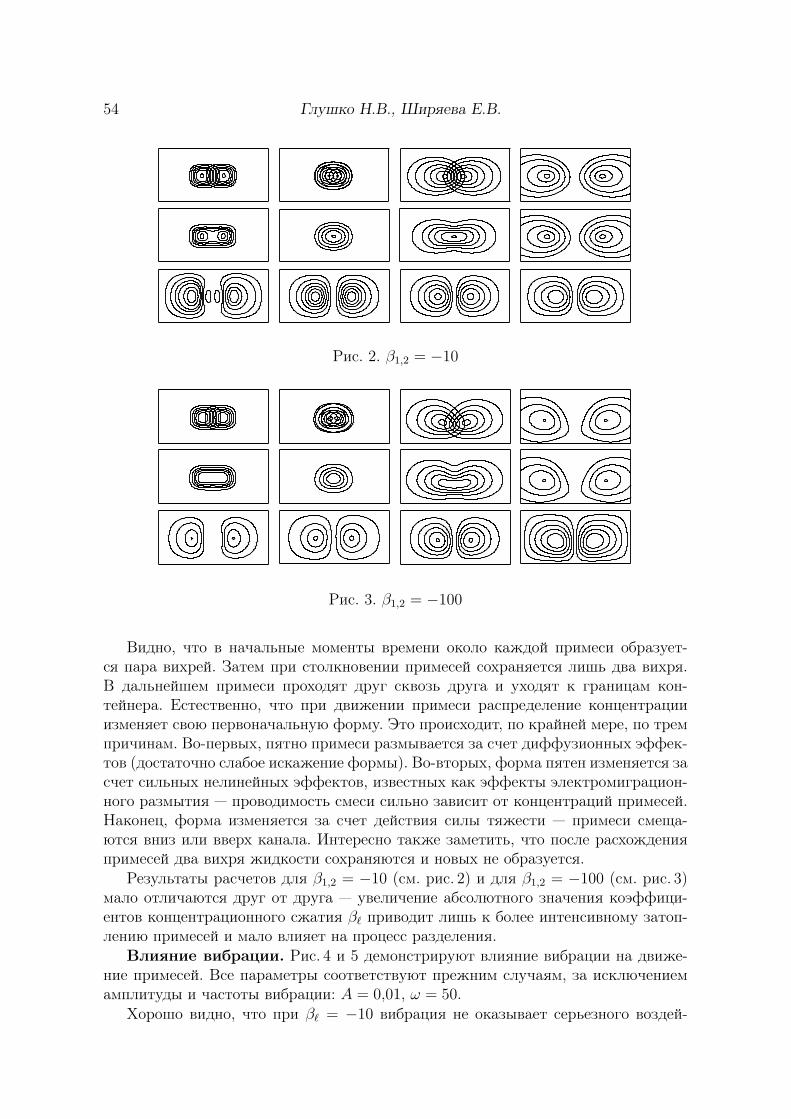
54 Глушко Н.В., Ширяева Е.В.
Рис. 2. β1,2 = −10
Рис. 3. β1,2 = −100
Видно, что в начальные моменты времени около каждой примеси образует-ся пара вихрей. Затем при столкновении примесей сохраняется лишь два вихря.В дальнейшем примеси проходят друг сквозь друга и уходят к границам кон-тейнера. Естественно, что при движении примеси распределение концентрацииизменяет свою первоначальную форму. Это происходит, по крайней мере, по тремпричинам. Во-первых, пятно примеси размывается за счет диффузионных эффек-тов (достаточно слабое искажение формы). Во-вторых, форма пятен изменяется засчет сильных нелинейных эффектов, известных как эффекты электромиграцион-ного размытия — проводимость смеси сильно зависит от концентраций примесей.Наконец, форма изменяется за счет действия силы тяжести — примеси смеща-ются вниз или вверх канала. Интересно также заметить, что после расхожденияпримесей два вихря жидкости сохраняются и новых не образуется.
Результаты расчетов для β1,2 = −10 (см. рис. 2) и для β1,2 = −100 (см. рис. 3)мало отличаются друг от друга — увеличение абсолютного значения коэффици-ентов концентрационного сжатия β` приводит лишь к более интенсивному затоп-лению примесей и мало влияет на процесс разделения.
Влияние вибрации. Рис. 4 и 5 демонстрируют влияние вибрации на движе-ние примесей. Все параметры соответствуют прежним случаям, за исключениемамплитуды и частоты вибрации: A = 0,01, ω = 50.
Хорошо видно, что при β` = −10 вибрация не оказывает серьезного воздей-
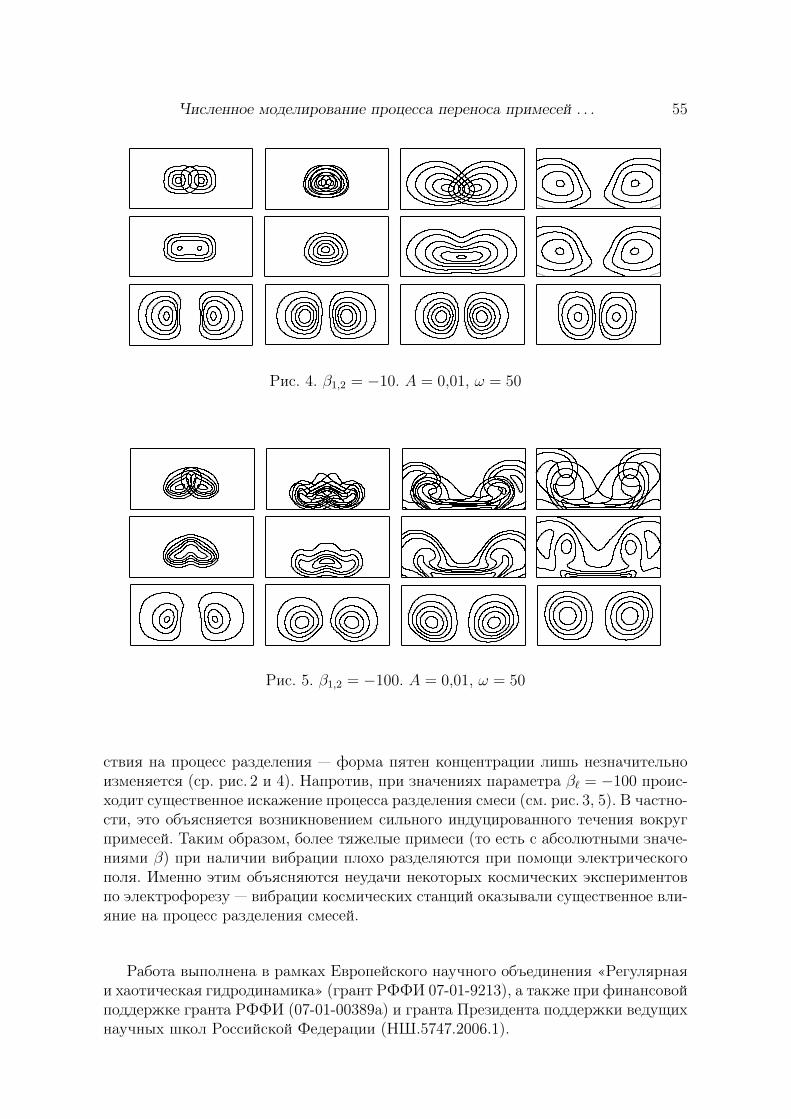
Численное моделирование процесса переноса примесей . . . 55
Рис. 4. β1,2 = −10. A = 0,01, ω = 50
Рис. 5. β1,2 = −100. A = 0,01, ω = 50
ствия на процесс разделения — форма пятен концентрации лишь незначительноизменяется (ср. рис. 2 и 4). Напротив, при значениях параметра β` = −100 проис-ходит существенное искажение процесса разделения смеси (см. рис. 3, 5). В частно-сти, это объясняется возникновением сильного индуцированного течения вокругпримесей. Таким образом, более тяжелые примеси (то есть с абсолютными значе-ниями β) при наличии вибрации плохо разделяются при помощи электрическогополя. Именно этим объясняются неудачи некоторых космических экспериментовпо электрофорезу — вибрации космических станций оказывали существенное вли-яние на процесс разделения смесей.
Работа выполнена в рамках Европейского научного объединения «Регулярнаяи хаотическая гидродинамика» (грант РФФИ 07-01-9213), а также при финансовойподдержке гранта РФФИ (07-01-00389а) и гранта Президента поддержки ведущихнаучных школ Российской Федерации (НШ.5747.2006.1).

56 Глушко Н.В., Ширяева Е.В.
Список литературы[1] Бабский В.Г., Жуков М.Ю., Юдович В.И. Математическая теория электрофореза.
Киев: Наукова думка, 1983. 202 с.
[2] Жуков М.Ю. Массоперенос электрическим полем. Ростов н/Д: Изд-во РГУ, 2005.216 с.
[3] Флетчер К. Вычислительные методы в динамике жидкостей. Т. 2. М.: Мир, 1991.552 с.
Glushko N.V., Shiryaeva E.V. Numerical modeling of process of carry of impurityby an electric field in the channel at presence of vibration. The problem on behaviour vis-cous incompressible multicomponent liquid under action external electric fields is investigatedby numerical methods. We assume that the concentration of impurities are small in com-parison with concentration of solvent. Such problem is very important in the practice ofelectrophoresis (a method of separation a mixture on individual components under action anelectric field). In a case of preparative electrophoresis transfer of impurity under action anelectric field causes strong induced flow which deforms a process of separation of a mixture.
We study problem for a wide interval of parameters. To calculate the implicit and explicitfinite-difference schemes are used. The effective algorithm for the solving elliptic boundaryproblems is realized. Movement of two impurities is investigated in details. In particular, itis shown, that in some cases vibration essentially deforms process of separation of a mixture.
БЛОКИРОВАНИЕ УПРУГИХ ВОЛН СИСТЕМОЙ ПОЛОСОВЫХТРЕЩИН
Глушков Е.В., Голуб М.В.Кубанский государственный университет, Краснодар
Исследуется волновые процессы в упругом слое, содержащем группу полосовых го-ризонтальных трещин, при распространении в нем бегущих волн. На основе интеграль-ного подхода с применением матриц Грина строятся интегральные представления дляпадающего поля и волновых полей, возникающих из-за наличия трещин. Для определе-ния неизвестных скачков смещений на трещинах используется метод граничных инте-гральных уравнений, при этом учитывается взаимное влияние всех трещин. Проводитсяисследование спектра интегрального оператора для разных вариантов их взаимного рас-положения. Спектр системы трещин сопоставляется со спектром соответствующих ин-тегральных операторов для каждой трещины в отдельности. Прослеживается рассмот-ренная ранее для одиночных трещин связь между спектром и резонансными частотамиили частотами блокирования.
1. ВведениеНовые материалы, нашедшие широкое промышленное применение, зачастую
являются либо многослойными, либо имеют микроструктуру. В них возможно об-разование интерфейсных трещин или отслоений на стыке слоев, между включе-нием и заполнителем и т.п. Более того, микродефекты содержатся практическиво всех реальных материалах — особенно в кусочно-неоднородных, будь то земнаякора или фюзеляж самолета из композитного материала. Наличие микродефектовможет стать причиной возникновения трещин и отслоений макроразмеров, кото-рые несут опасность разрушения на резонансных частотах. Оценка возможноститаких явлений требует точного решения соответствующих задач теории упругостикак для одной, так и для группы трещин.
Одним из наиболее широко применяемых эффективных подходов к описа-нию поведения материалов с трещинами является метод граничных интегральныхуравнений [1, 2]. Использование интегрального подхода [3] для трещин в слое и по-лупространстве позволило изучить резонансные свойства отдельных трещин [4, 5].Обобщение данной методики на случай группы трещин с учетом их волнового вза-имодействия позволяет изучить изменение резонансных свойств волновода припоявлении дополнительных трещин. Цель такого сопоставления – выяснить, в ка-ких ситуациях взаимное влияние трещин приводит к существенному изменениюхарактеристик прохождения бегущих волн и резонансных свойств, а в каких имможно пренебречь, воспользовавшись результатами для каждой из трещин в от-дельности.
2. Постановка задачи.Рассматриваются гармонические установившиеся колебания u e−iωt с круговой
частотой ω свободного упругого изотропного слоя, ослабленного набором горизон-тальных прямолинейных полосовых трещин ΩmM
m=1 (далее гармонический мно-житель e−iωt опущен). Каждая из M трещин Ωm моделируется математическим

58 Глушков Е.В., Голуб М.В.
разрезом нулевой толщины z = −dm, |x − xm| < lm, поверхности которого неконтактируют и свободны от нормальных и касательных напряжений
τ = τxz, σz∣∣∣∣Ωm
= 0, m = 1...M, (1)
а поле смещений терпит разрыв с неизвестным скачком
vm(x) = u(x,−dm − 0)− u(x,−dm + 0), |x− xm| < lm, m = 1...M.
Положение трещины однозначно определяется координатами ее центра (xm,−dm)и ее шириной 2lm.
В случае установившихся гармонических колебаний перемещения слоя u =ux, uz удовлетворяют уравнениям движения Ляме
c2S∇2 u + (c2
P − c2S)div grad u + ρω2u = 0, (2)
где cP и cS — скорости продольных и поперечных волн в упругом материале сплотностью ρ. Слой занимает область |x| < ∞, −H < z < 0, на верхней поверх-ности которой прикладывается нагрузка τ (x, 0) = q0(x), а нижняя поверхностьсвободна от напряжений: τ (x,−H) = 0.
2. Схема построения решения.Методика построения решения для системы трещин аналогична схеме решения
задачи для одиночной трещины, поэтому в приводимой ниже схеме описываютсятолько основные этапы, со ссылками на работы, в которых может быть полученаболее подробная информация. В силу линейности задачи колебания u волноводас группой трещин представляются в виде суперпозиции падающего поля u0 иполей um, описывающих влияние каждой из M трещин
u = u0 +M∑
m=1
um.
Для поля u0 используются те же представления волновых полей в виде контурныхинтегралов, что и для одиночной трещины в слое (см. [5]), для полей смещений инапряжений, наводимых каждой из трещин, аналогично с [4, 5] выводятся пред-ставления в виде контурных интегралов:
um(x, z) = 12π
∫Γ
Nm(α, z)V m(α)e−iαxdα,
τm(x, z) = 12π
∫Γ
Sm(α, z)V m(α)e−iαxdα.(3)
Здесь Nm(α, z), Sm(α, z) — символы матриц Грина для смещений и напряжений воднородном изотропном свободном упругом слое на глубине z = −dm; V m(α) —преобразование Фурье скачка vm по x; α — параметр интегрального преобразова-ния Фурье; контур Γ выбирается в соответствии с принципом предельного погло-щения [3].

Блокирование упругих волн системой полосовых трещин 59
Подстановка интегральных представлений (3) в условия на берегах трещин (1)приводит к системе интегральных уравнений
M∑j=1
Lmjvj = fm, (x, z) ∈ Ωm, m = 1...M. (4)
Здесь fm — поле напряжений от источника в области Ωm; слагаемые Lmmvm опи-сывают поля напряжений на отрезке (трещине) Ωm, соответствующие скачкамсмещений vm на тех же отрезках (т.е. без учета наличия соседних трещин), аслагаемые Lmjv при m 6= j отвечают за поля, наводимые j–ой трещиной на отре-зок Ωm. При этом операторы Lmm отличаются от операторов Lmj, m 6= j.
В рамках схемы Галёркина неизвестные скачки смещений раскладываются пополиномам Чебышева 2-го рода Uk с корневым весом
√1− ξ2
m, ξm = (x− xm)/lm,описывающим их известное поведение на краях разрезов
vm(x) =Nm∑
k=1
ckmpk
m, pkm =
√1− ξ2
mUk(ξm).
Неизвестные коэффициенты разложения ckm определяются далее из системы ли-
нейных алгебраических уравнений
M∑j=1
Nj∑
k=0
alkmjc
km = gl
m, m = 1, 2, ..., M, l = 0, ..., Nm, (5)
возникающей при проектировании уравнений (4) на систему тех же координат-ных функций pl
m. Блок-матрицы alkmj = (Lmjp
kj , p
lm)L2 размерности 2 × 2 и век-
торы glm = (fm, pl
m)L2 длины 2 выражаются в виде контурных интегралов отФурье-символов операторов Lmj, координатных функций и правой части fm. От-носительно обобщенного вектора неизвестных коэффициентов c = c1, ..., cM,cm = c1
m, c2m, ..., cNm
m , система (5) записывается в матричном виде
Dc = g (6)
с матрицей D, состоящей из диагональных блок-матриц Am = ||alkmm||Nm
l,k=0 и вне-диагональных блоков Bmj = ||alk
mj||NmNj
l,k=0 ; g = g1, ..., gM, gm = g0m, g1
m, ..., gNmm .
Резонансные полюса одиночных трещин, найденные в [4, 5], совпадают со спек-тральными точками ωm
n интегральных операторов Lmm, т.е. аппроксимируютсякорнями характеристических уравнений
det Am(ωmn ) = 0,
в то время как для рассматриваемой системы трещин спектральные точки ωn
аппроксимируются корнями уравнения
det D(ω) = 0. (7)
Как и в [4, 5] для численных примеров был взят упругий материал с коэф-фициентом Пуассона ν = 1/3 и скоростью продольных волн cS = 1 (соотношение
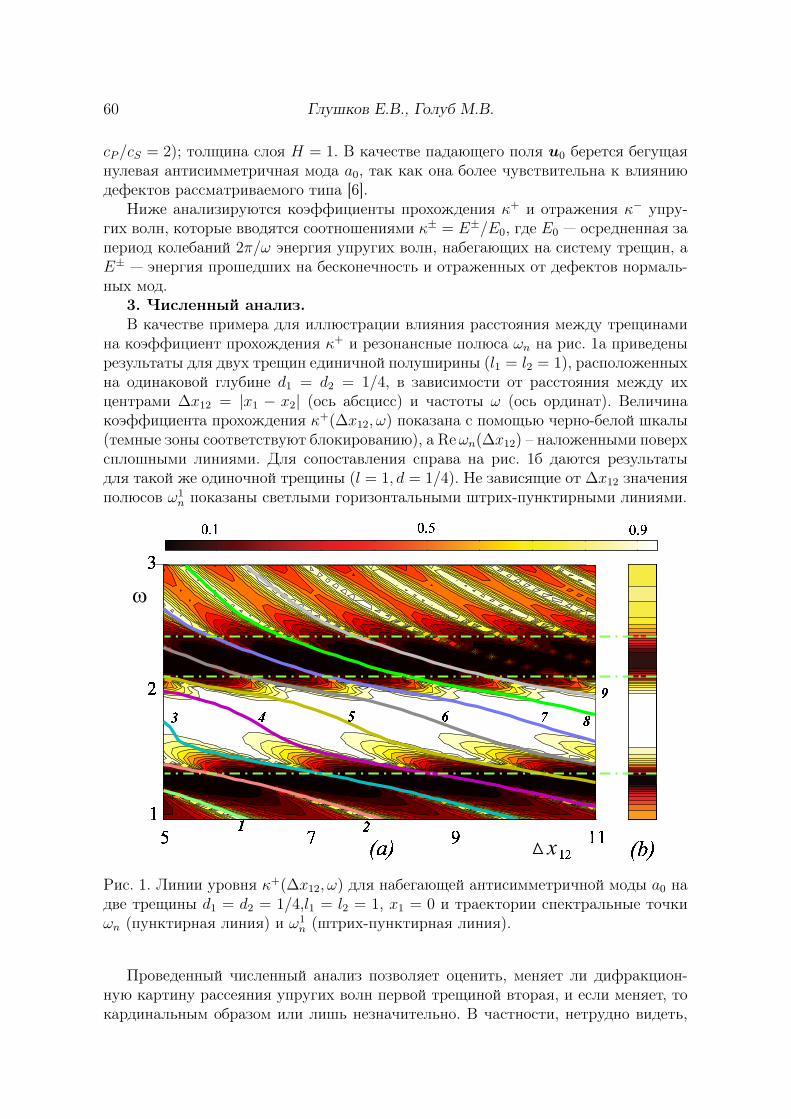
60 Глушков Е.В., Голуб М.В.
cP /cS = 2); толщина слоя H = 1. В качестве падающего поля u0 берется бегущаянулевая антисимметричная мода a0, так как она более чувствительна к влияниюдефектов рассматриваемого типа [6].
Ниже анализируются коэффициенты прохождения κ+ и отражения κ− упру-гих волн, которые вводятся соотношениями κ± = E±/E0, где E0 — осредненная запериод колебаний 2π/ω энергия упругих волн, набегающих на систему трещин, аE± — энергия прошедших на бесконечность и отраженных от дефектов нормаль-ных мод.
3. Численный анализ.В качестве примера для иллюстрации влияния расстояния между трещинами
на коэффициент прохождения κ+ и резонансные полюса ωn на рис. 1а приведенырезультаты для двух трещин единичной полуширины (l1 = l2 = 1), расположенныхна одинаковой глубине d1 = d2 = 1/4, в зависимости от расстояния между ихцентрами ∆x12 = |x1 − x2| (ось абсцисс) и частоты ω (ось ординат). Величинакоэффициента прохождения κ+(∆x12, ω) показана с помощью черно-белой шкалы(темные зоны соответствуют блокированию), а Re ωn(∆x12) – наложенными поверхсплошными линиями. Для сопоставления справа на рис. 1б даются результатыдля такой же одиночной трещины (l = 1, d = 1/4). Не зависящие от ∆x12 значенияполюсов ω1
n показаны светлыми горизонтальными штрих-пунктирными линиями.
Рис. 1. Линии уровня κ+(∆x12, ω) для набегающей антисимметричной моды a0 надве трещины d1 = d2 = 1/4,l1 = l2 = 1, x1 = 0 и траектории спектральные точкиωn (пунктирная линия) и ω1
n (штрих-пунктирная линия).
Проведенный численный анализ позволяет оценить, меняет ли дифракцион-ную картину рассеяния упругих волн первой трещиной вторая, и если меняет, токардинальным образом или лишь незначительно. В частности, нетрудно видеть,
Блокирование упругих волн системой полосовых трещин 61
что темные зоны κ+ для системы трещин (рис. 1a) расположены примерно в томже интервале частот, что и для одной трещины (рис. 1б). Кроме того, поверх-ность κ+ для системы из двух трещин рассекается кривыми гиперболическоговида, на которых κ+ достигает локального максимума (узкие полосы пропуска-ния в зоне блокирования). Как можно видеть из рис. 1a, эти полосы совпадают скривыми Reωn.
Проведен также численный анализ для других соотношений между глубина-ми и/или размерами трещин. Он показал, что появление каждой дополнительнойтрещины, как правило, приводит к уменьшению коэффициента прохождения, тоесть к размыванию и уменьшению амплитуды исходного волнового пакета. Однаконередко резонанс группы трещин во многом определяется резонансными свойства-ми каждой из них в отдельности.
Работа выполнена при поддержке грантов РФФИ ( 06-01-96607) и INTAS( 05-1000008-7979).
Список литературы[1] Бабешко В.А. К проблеме исследования динамических свойств трещиноватых тел
// ДАН СССР. 1989. Т. 304. N. 2. С. 318-321.
[2] Bostrom A. Review of hypersingular integral equation method for crack scattering andapplication to modeling of ultrasonic nondestructive evaluation // Appl. Mech. Rev.2003. V. 56. N4. P.383-405.
[3] Воpович И.И., Бабешко В.А. Динамические смешанные задачи теории упругостидля неклассических областей. М.: Наука, 1979, 320 с.
[4] Глушков Е.В., Глушкова Н.В., Голуб М.В. Блокирование бегущих волн и локализа-ция энергии упругих колебаний при дифракции на трещине // Акустический жур-нал. 2006. Т. 52. 3. С. 314–325.
[5] Glushkov E., Glushkova N., Golub M., Bostrom A. Natural resonance frequencies, waveblocking, and energy localization in an elastic half-space and waveguide with a crack //Journal Acoustical Society of America. 2006. V. 119. N 6. P. 3589-3598.
[6] Wilcox P.D., Lowe M.J.S., Cawley P. Mode and Transducer Selection for Long RangeLamb Wave Inspection // Journal of intelligent material systems and structures. 2001.V. 12. P. 553–565.
Glushkov E.V., Glushkova N.V., Golub M.V.Elastic wave blocking in a layer withmultiple strip-like cracks. Wave propagation in an elastic layer with a set of strip-like horizontalcracks is analyzed. Both incident and scattered fields are represented in terms of path Fourierintegrals. Crack opening displacements are determined using boundary integral equationmethod and Galerkin’s scheme taking into account the mutual crack’s influence. Spectralpoints and resonance frequencies for an elastic layer with single crack and system of cracksare compared.
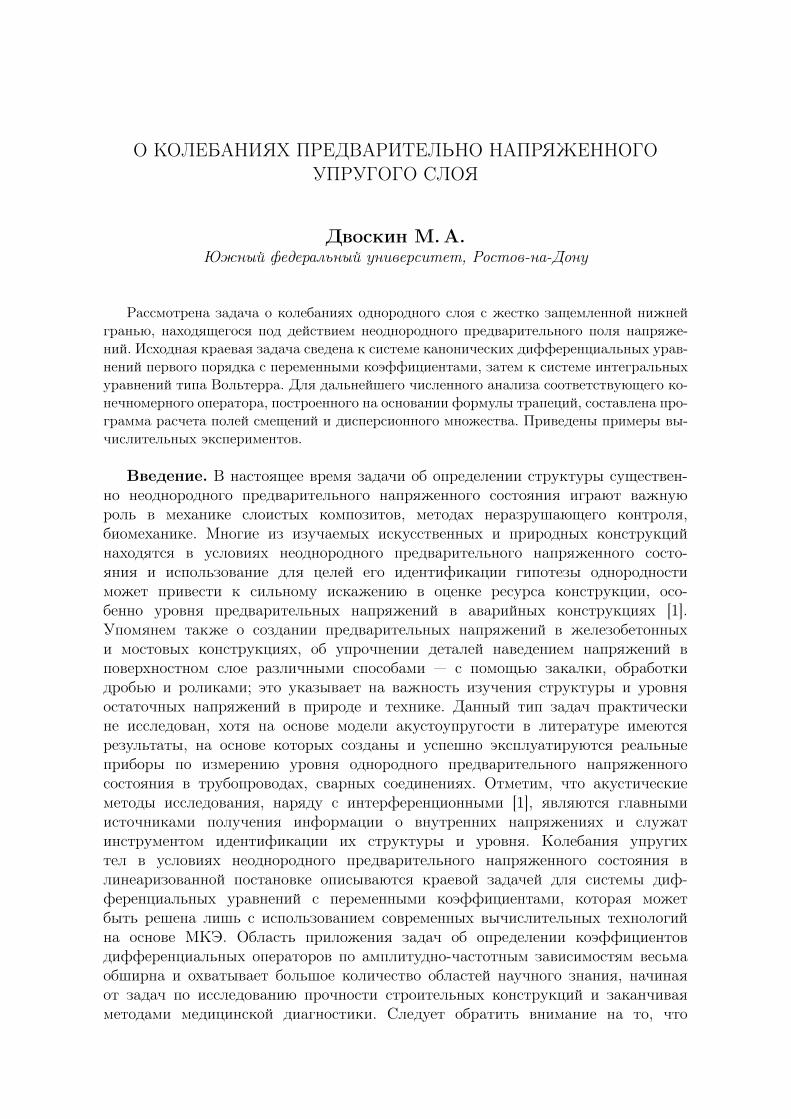
О КОЛЕБАНИЯХ ПРЕДВАРИТЕЛЬНО НАПРЯЖЕННОГОУПРУГОГО СЛОЯ
Двоскин М.А.Южный федеральный университет, Ростов-на-Дону
Рассмотрена задача о колебаниях однородного слоя с жестко защемленной нижнейгранью, находящегося под действием неоднородного предварительного поля напряже-ний. Исходная краевая задача сведена к системе канонических дифференциальных урав-нений первого порядка с переменными коэффициентами, затем к системе интегральныхуравнений типа Вольтерра. Для дальнейшего численного анализа соответствующего ко-нечномерного оператора, построенного на основании формулы трапеций, составлена про-грамма расчета полей смещений и дисперсионного множества. Приведены примеры вы-числительных экспериментов.
Введение. В настоящее время задачи об определении структуры существен-но неоднородного предварительного напряженного состояния играют важнуюроль в механике слоистых композитов, методах неразрушающего контроля,биомеханике. Многие из изучаемых искусственных и природных конструкцийнаходятся в условиях неоднородного предварительного напряженного состо-яния и использование для целей его идентификации гипотезы однородностиможет привести к сильному искажению в оценке ресурса конструкции, осо-бенно уровня предварительных напряжений в аварийных конструкциях [1].Упомянем также о создании предварительных напряжений в железобетонныхи мостовых конструкциях, об упрочнении деталей наведением напряжений вповерхностном слое различными способами — с помощью закалки, обработкидробью и роликами; это указывает на важность изучения структуры и уровняостаточных напряжений в природе и технике. Данный тип задач практическине исследован, хотя на основе модели акустоупругости в литературе имеютсярезультаты, на основе которых созданы и успешно эксплуатируются реальныеприборы по измерению уровня однородного предварительного напряженногосостояния в трубопроводах, сварных соединениях. Отметим, что акустическиеметоды исследования, наряду с интерференционными [1], являются главнымиисточниками получения информации о внутренних напряжениях и служатинструментом идентификации их структуры и уровня. Колебания упругихтел в условиях неоднородного предварительного напряженного состояния влинеаризованной постановке описываются краевой задачей для системы диф-ференциальных уравнений с переменными коэффициентами, которая можетбыть решена лишь с использованием современных вычислительных технологийна основе МКЭ. Область приложения задач об определении коэффициентовдифференциальных операторов по амплитудно-частотным зависимостям весьмаобширна и охватывает большое количество областей научного знания, начинаяот задач по исследованию прочности строительных конструкций и заканчиваяметодами медицинской диагностики. Следует обратить внимание на то, что

О колебаниях предварительно напряженного упругого слоя 63
исследование влияния предварительного напряженного состояния на волновыепроцессы в упругих телах имеет важное значение в связи с задачами техническойдиагностики. Отметим что это влияние в случае однородного предварительногонапряженного состояния достаточно подробно изучено в литературе [1]–[10] исводится к исследованию краевых задач с постоянными коэффициентами. Внастоящей работе исследовано влияние неоднородного предварительного напря-женного состояния на волновые процессы в слое.
Постановка задачи. Рассматривается плоская задача об установившихся ко-лебаниях с частотой ω для однородного изотропного слоя |x1| ≤ ∞, 0 ≤ x3 ≤ hс жестко закрепленным основанием под действием распределенной нагрузки наверхней границе и предварительными напряжениями. В этом случае уравнениядвижения и граничные условия имеют вид
∂1σ11 + ∂3σ13 + Lu1 + ρω2u1 = 0,∂1σ31 + ∂3σ33 + Lu3 + ρω2u3 = 0,
(1)
где L = (σ011∂
21 + 2σ0
13∂1∂3 + σ033∂
23)− f1∂1 − f3∂3.
Граничные условия записываются в виде:
u1|x3=0 = 0,u3|x3=0 = 0
(2)
(u1,1σ
013 + u1,3σ
033 + σ13)|x3=h = p1(x1),
(u3,1σ031 + u3,3σ
033 + σ33)|x3=h = p3(x1)
(3)
Определение предварительного напряженного состояния в частномслучае. Для задания предварительного напряженного состояния был рассмотренслучай действия на слой постоянной массовой силы интенсивности C. Гранич-ные условия выбраны следующим образом: u0
3 = 0, σ033(h) = 0. Частное решение
имеет вид: u01(x3) = 0, u0
3 =Cx3(2h− x3)
2(λ + 2µ). Компоненты тензора предварительных
напряжений представимы в форме
σ011 =
λC(h− x3)
λ + 2µ,
σ013 = 0, σ0
33 = C(h− x3).
(4)
Для этого частного случая граничные условия (3) в исходной задаче упрощаютсяи имеют вид: σ13|x3=h = p1, σ33|x3=h = p3. Применим к системе (1) преобразованиеФурье по координате x1 и сведем ее к канонической системе дифференциальныхуравнений первого порядка с переменными коэффициентами относительно транс-формант: u1, u3, σ13, σ33. Подробно данная схема решения описана в [11].
−dσ13
dx3
= −ıασ11 − α2u1σ011 +
d2u1
dx23
σ033 +
du1
x3
σ033
dx3
+ ρω2u1
−dσ33
dx3
= −ıασ31 − α2u3σ011 +
d2u3
dx23
σ033 +
du3
x3
dσ033
dx3
+ ρω2u3
(5)

64 Двоскин М.А.
Закон Гука запишется в виде
σ11 = λ
(−ıαu1 +
du3
dx3
)− 2µıαu1
σ33 = λ
(−ıαu1 +
du3
dx3
)+ 2µ
du3
x3
σ13 = µ
(du1
dx3
− ıαu3
)(6)
Введя безразмерные параметры z =x3
h, (x3ε[0, h] −→ zε[0, 1]), µ =
µ(hz)
µ0
,
λ =λ(hz)
λ0
, p1 =p1
µ0
, p3 =p3
µ0
, W13 =σ13(hz)
µ0
, W33 =σ33(hz)
µ0
, σ011 =
σ011(hz)
µ0
,
σ033 =
σ033(hz)
µ0
, V1 =u1(hz)
h, V3 =
u3(hz)
h, ˆρ(hz) =
ρ(hz)
ρ0
, β = αh, κ2 =ρ0ω
2h2
µ0
,ρ0, µ0 — некоторые характерные плотность и модуль сдвига, проинтегрировавдифференциальные уравнения от 0 до z и найдя константы интегрирования изграничных условий, получим четыре интегральных уравнения типа Вольтерра.
V1 =z∫0
(βV3 +
1
µW13
)dz,
V3 =z∫0
(1
λ + 2µ(λβV3 + W33)
)dz,
W13 = −z∫0
(V1
µ
µ + σ033
(4(λ + µ)µβ2
λ + µ+ β2
(σ0
11 +λσ0
33
λ + 2µ
)− κ2
))−
−1∫z
(V3
µβ
µ + σ033
dσ033
dx3
)dz +
1∫z
(W13
1
µ + σ033
dσ033
dx3
−W33
βµ(λ + σ033)
(λ + 2µ)(µ + σ033)
)dz + p1,
W33 =1∫z
V1
(µλβ
(µ + σ033)(λ + 2µ + σ0
33)
dσ033
dx3
)dz−
−1∫z
V3
(β2σ0
11(λ + 2µ) + σ033λβ2 − κ2(λ + 2µ)
λ + 2µ + σ033
)dz−
−1∫z
(W13β
µ(λ + 2µ)− σ033λ
µ(λ + 2µ + σ033)
−W33
1
λ + 2µ + σ033
dσ033
dx3
)dz + p3.
(7)
Для численного анализа полученных интегральных уравнений (6) использо-вался конечномерный оператор, построенный на основе формулы трапеций. Былпроведен расчет дисперсионных множеств для различных законов распределенияпредварительных напряжений.
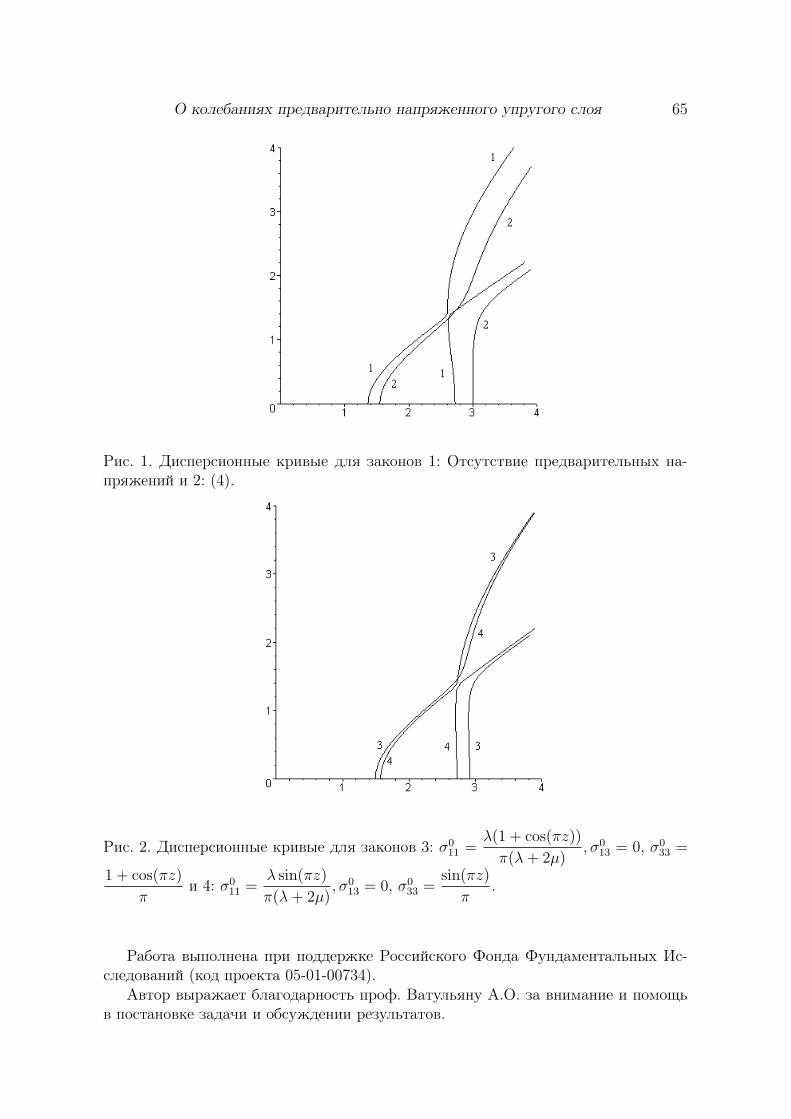
О колебаниях предварительно напряженного упругого слоя 65
Рис. 1. Дисперсионные кривые для законов 1: Отсутствие предварительных на-пряжений и 2: (4).
Рис. 2. Дисперсионные кривые для законов 3: σ011 =
λ(1 + cos(πz))
π(λ + 2µ), σ0
13 = 0, σ033 =
1 + cos(πz)
πи 4: σ0
11 =λ sin(πz)
π(λ + 2µ), σ0
13 = 0, σ033 =
sin(πz)
π.
Работа выполнена при поддержке Российского Фонда Фундаментальных Ис-следований (код проекта 05-01-00734).
Автор выражает благодарность проф. Ватульяну А.О. за внимание и помощьв постановке задачи и обсуждении результатов.
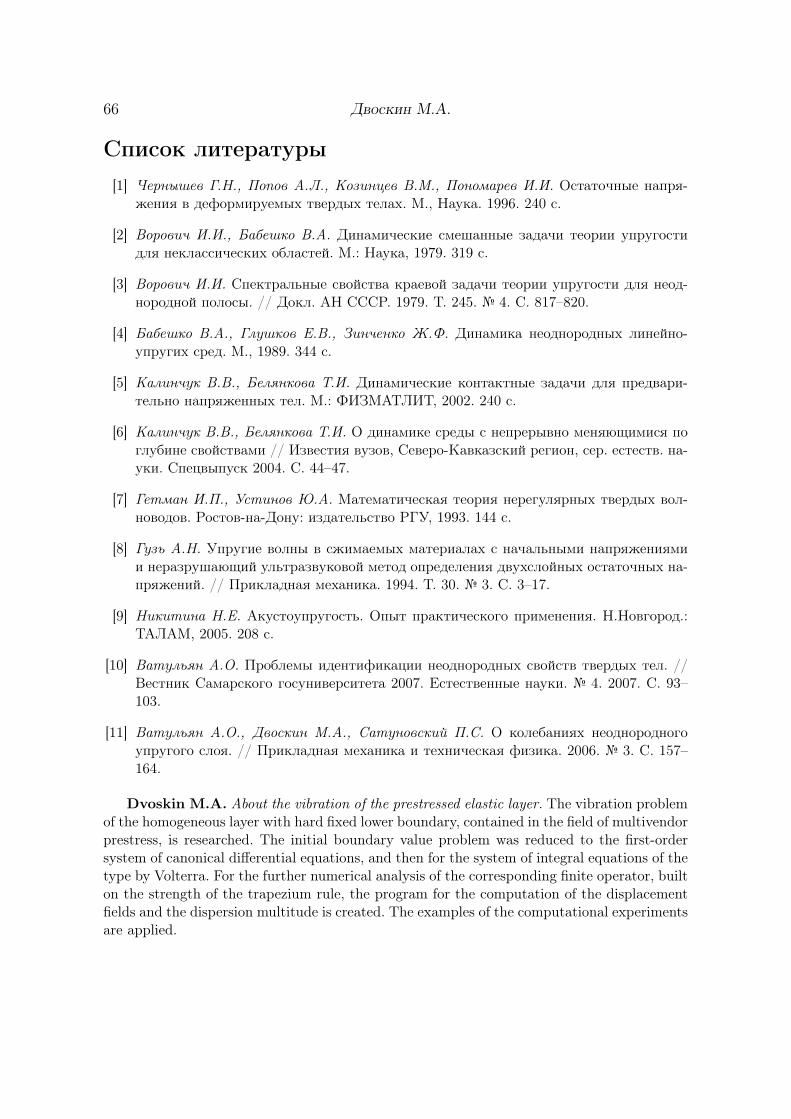
66 Двоскин М.А.
Список литературы[1] Чернышев Г.Н., Попов А.Л., Козинцев В.М., Пономарев И.И. Остаточные напря-
жения в деформируемых твердых телах. М., Наука. 1996. 240 c.
[2] Ворович И.И., Бабешко В.А. Динамические смешанные задачи теории упругостидля неклассических областей. М.: Наука, 1979. 319 с.
[3] Ворович И.И. Спектральные свойства краевой задачи теории упругости для неод-нородной полосы. // Докл. АН СССР. 1979. Т. 245. 4. С. 817–820.
[4] Бабешко В.А., Глушков Е.В., Зинченко Ж.Ф. Динамика неоднородных линейно-упругих сред. М., 1989. 344 с.
[5] Калинчук В.В., Белянкова Т.И. Динамические контактные задачи для предвари-тельно напряженных тел. М.: ФИЗМАТЛИТ, 2002. 240 с.
[6] Калинчук В.В., Белянкова Т.И. О динамике среды с непрерывно меняющимися поглубине свойствами // Известия вузов, Северо-Кавказский регион, сер. естеств. на-уки. Спецвыпуск 2004. С. 44–47.
[7] Гетман И.П., Устинов Ю.А. Математическая теория нерегулярных твердых вол-новодов. Ростов-на-Дону: издательство РГУ, 1993. 144 с.
[8] Гузь А.Н. Упругие волны в сжимаемых материалах с начальными напряжениямии неразрушающий ультразвуковой метод определения двухслойных остаточных на-пряжений. // Прикладная механика. 1994. Т. 30. 3. С. 3–17.
[9] Никитина Н.Е. Акустоупругость. Опыт практического применения. Н.Новгород.:ТАЛАМ, 2005. 208 с.
[10] Ватульян А.О. Проблемы идентификации неоднородных свойств твердых тел. //Вестник Самарского госуниверситета 2007. Естественные науки. 4. 2007. С. 93–103.
[11] Ватульян А.О., Двоскин М.А., Сатуновский П.С. О колебаниях неоднородногоупругого слоя. // Прикладная механика и техническая физика. 2006. 3. С. 157–164.
Dvoskin M.A. About the vibration of the prestressed elastic layer. The vibration problemof the homogeneous layer with hard fixed lower boundary, contained in the field of multivendorprestress, is researched. The initial boundary value problem was reduced to the first-ordersystem of canonical differential equations, and then for the system of integral equations of thetype by Volterra. For the further numerical analysis of the corresponding finite operator, builton the strength of the trapezium rule, the program for the computation of the displacementfields and the dispersion multitude is created. The examples of the computational experimentsare applied.

РАЗДЕЛЕНИЕ ДВУХКОМПОНЕНТНОЙ СМЕСИ ПРИ ПОМОЩИЭЛЕКТРИЧЕСКОГО ПОЛЯ
Елаева М.С.Южный федеральный университет, Ростов-на-Дону
Рассматривается процесс разделения двухкомпонентной смеси под действием элек-трического поля в случае, когда проводимость смеси зависит от концентрации компонент.Система уравнений, описывающая этот процесс, приводится к инвариантам Римана. Вы-водится условие гиперболичности системы и проводится исследование системы для это-го случая. Рассмотрены различные варианты начального распределения концентраций.С помощью метода характеристик для каждого варианта исследован процесс эволю-ции начального распределения концентрации до момента времени, когда слабый разрыввзаимодействует с сильным, и исследован случай взаимодействия слабого и сильногоразрывов.
1 Постановка задачи
Процесс разделения смеси при помощи электрического поля, в бездиффузион-ном приближении описывается уравнениями (см., например, [1, 2, 3])
∂ci
∂t+
∂
∂x
(µici
σ
)= 0, i = 1, 2, σ = 1 + α1c1 + α2c2.
Здесь ci = ci(x, t) — концентрации компонент (ci > 0), σ — проводимость сме-си (σ > 0), αj — коэффициенты влияния концентрации на проводимость, µi —электрофоретические подвижности компонент.
При помощи введения «эффективных» концентраций ui = αici удается исклю-чить αi и система сводится к виду
∂ui
∂t+
∂
∂x
(µiui
1 + s
)= 0, i = 1, 2, s = u1 + u2 > −1. (1)
Заметим, что коэффициенты αi могут быть как положительными, так и отри-цательными. Это означает, что ui 6 0 при αi < 0 и ui > 0 при αi > 0.
В случае построения разрывных решений система уравнений дополняется усло-виями Рэнкина-Гюгонио на линиях разрыва x = x(t)
D [ui] =
[µiui
1 + s
], i = 1, 2, D =
dx(t)
dt, (2)
где D — скорость движения линии разрыва, символ [. . . ] означает величину раз-рыва на линии x = x(t), т.е. [f ] = f(x(t) + 0, t)− f(x(t)− 0, t).

68 Елаева М.С.
Рассмотрим аналог задачи Римана о распаде начального разрыва, задавая на-чальные условия для (1), (2) кусочно-постоянными (см. рис. 1),
ui|t=0 =
0, x < x0
u0i , x0 < x < x1
0, x > x1
(3)
Задача (1)–(3) позволяет изучить процесс разделения двух компонент, находя-щихся в начальный момент времени в одной и той же области электрофоретиче-ской камеры.
Riui
u0
1
u0
2
x1x0 x
µ2
xx1x0
µ1
R−
2
R−
1
Рис. 1. Начальные условия
2 Инварианты Римана
Используя результаты [1], [2] запишем (1)–(3) для инвариантов Римана
∂R1
∂t+
R21R2
µ1µ2
∂R1
∂x= 0,
∂R2
∂t+
R1R22
µ1µ2
∂R2
∂x= 0; (4)
D
[µ2
R1R2
(µ1 −R1)(µ1 −R2)
]= [(µ1 −R1)(µ1 −R2)],
D
[µ1
R1R2
(µ2 −R1)(µ2 −R2)
]= [(µ2 −R1)(µ2 −R2)]; (5)
R1|t=0 =
µ1, x < x0
R−1 , x0 < x < x1
µ1, x > x1
, R2|t=0 =
µ2, x < x0
R−2 , x0 < x < x1
µ2, x > x1
(6)
Концентрации ui определяются по известным инвариантам Римана формулами
u1 =µ2(R1 − µ1)(R2 − µ1)
R1R2(µ1 − µ2), u2 =
µ1(R1 − µ2)(R2 − µ2)
R1R2(µ2 − µ1).
По известным ui инварианты Римана определяются корнями уравнения
(1 + u1 + u2)R2 − (µ1 + µ2 + µ1u2 + µ2u1)R + µ1µ2 = 0. (7)

Разделение двухкомпонентной смеси при помощи электрического поля 69
В зависимости от знака дискриминантаF (u1, u2) = (µ1 + µ2 + µ1u2 + µ2u1)
2 − 4(1 + u1 + u2)µ1µ2
инварианты Римана могут быть либо вещественными, либо комплексными. Наплоскости (u1, u2) кривая F (u1, u2) = 0 является параболой (см. рис. 2), которая вточке A = (0, (µ2 − µ1)/µ1) касается оси u1 = 0, в точке B = (µ1 − µ2)/µ2, 0) — осиu2 = 0, а в точке C = (−µ2/(µ2 − µ1), µ1/(µ2 − µ1)) — прямой 1 + s = 0.
В области F (u1, u2) > 0, 1 + s > 0 система (1) является гиперболической —инварианты Римана вещественны. В области F (u1, u2) < 0 инварианты Римана,определяемые (7), будут комплексными и система (1) имеет эллиптический тип(заштрихованная область на рис. 2).
−1
−1
u1
u2
A
B
1+
s=
0
C
F (u1, u2) = 0
Рис. 2. Области эллиптичности и гиперболичности
3 Начальная эволюция разрывов
В результате эволюции начального разрывов в точках x0, x1 возникает распре-деление концентраций (и инвариантов Римана), показанное на рис. 3. Заметим, чтоусловия на разрыве (2) (или (5)) дополняются условиями устойчивости Лакса [4],которые для ударных волн индекса k = 1, 2 имеют вид
λ−1 ≥ D1 ≥ λ+1 , D1 ≤ λ+
2 ; λ−2 ≥ D2 ≥ λ+2 , λ−1 ≤ D2; λi = Ri
R1R2
µ1µ2
.
Здесь λ−i = λi(u(x(t)− 0, t)), λ+i = λi(u(x(t) + 0, t)).
Для ударных волн x = x1s и x = x2
s (см. рис. 3) выводим
D1 = R−1 , D2 =
R−1 R−
2
µ1
.
Уравнения движения ударных волн (xs) и фронтов волн разрежения (левого —xl и правого — xr) имеют вид
x1s = x0 + R−
1 t, x1l = x1 +
(R−1 )2R−
2
µ1µ2
t, x1r = x1 +
µ1R−2
µ2
t,
x2s = x0 +
R−1 R−
2
µ1
t, x2l = x1 +
(R−2 )2
µ2
t, x2r = x1 + µ2t.
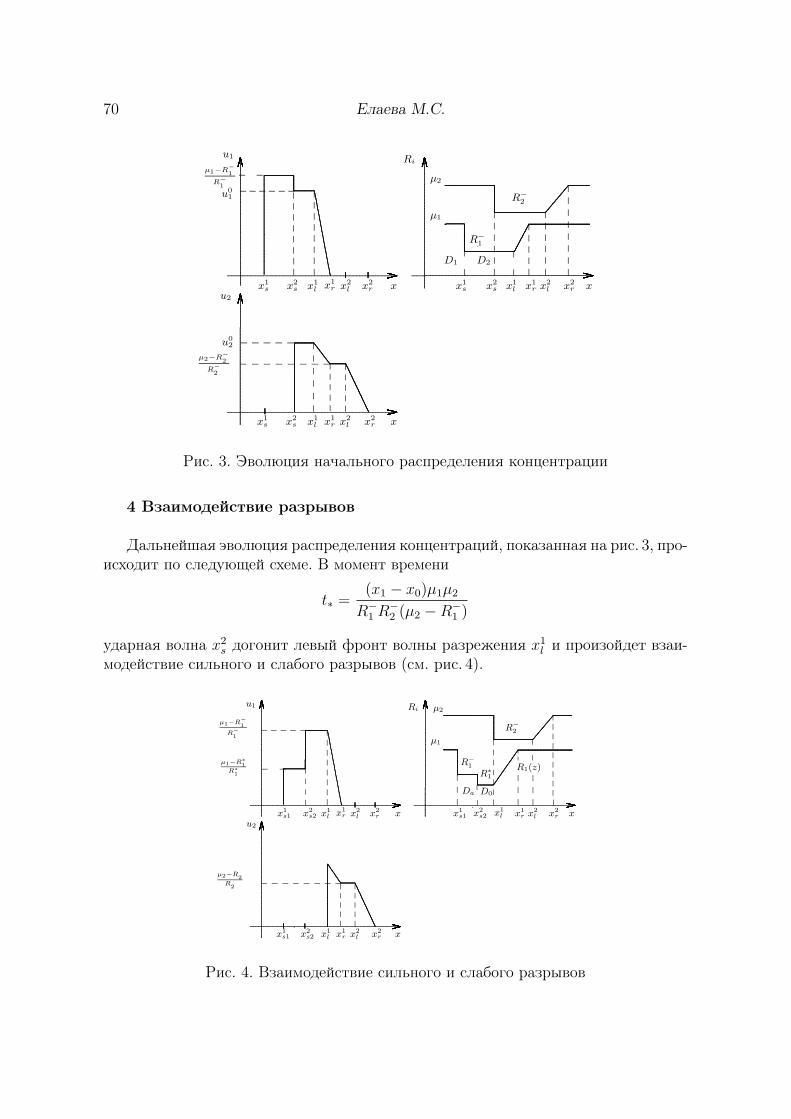
70 Елаева М.С.
u1
µ2
R−
2
x1
s
µ1−R−
1
R−
1
u0
1
u0
2
u2
µ2−R−
2
R−
2
µ1
R−
1
Ri
D1 D2
x2
s x1
l x1
r x2
r x2
l
x
x1
s x2
s x1
l x1
rx2
l x2
r
x1
s x2
s x1
l x1
r x2
l x2
r
x x
Рис. 3. Эволюция начального распределения концентрации
4 Взаимодействие разрывов
Дальнейшая эволюция распределения концентраций, показанная на рис. 3, про-исходит по следующей схеме. В момент времени
t∗ =(x1 − x0)µ1µ2
R−1 R−
2 (µ2 −R−1 )
ударная волна x2s догонит левый фронт волны разрежения x1
l и произойдет взаи-модействие сильного и слабого разрывов (см. рис. 4).
Riu1
u2
µ1−R−
1
R−
1
µ1−R∗
1
R∗
1
µ2−R2
R2
x1
s1 x2
s2 x1
l x2
lx1
r x2
r x
µ2
µ1
x1
s1 x2
s2 x1
l x1
r x2
l x2
r x
Da D0
R−
1
R−
2
R∗
1
R1(z)
x1
s1 x2
s2 x1
l x1
r x2
l x2
r x
Рис. 4. Взаимодействие сильного и слабого разрывов
Разделение двухкомпонентной смеси при помощи электрического поля 71
Для ударных волн x = x1s2 и x = x1
l имеем
Da =R1(z)R−
2
µ1
, D0 =R1(z)R−
1
µ1
, R1(z) =
(µ1µ2z
R−2
) 12
,
z =
õ2R
−2
µ1
+
√(x1 − x0)µ2
R−1 (µ2 −R−
1 )t
(√R−
1 −√
µ2
)
2
.
Исследование дальнейшего поведения концентраций показывает, что посленекоторой последовательности взаимодействий разрывов происходит полное раз-деление смеси на отдельные компоненты.
Список литературы[1] Жуков М.Ю., Юдович В.И. Математическая модель изотахофореза. //Доклады
АНН СССР. 1982. Т. 267, 2. С.334–338.
[2] Жуков М.Ю. Нестационарная модель изотахофореза. //ЖВМ и МФ, 1984. Т. 24, 4. С. 549–565.
[3] Жуков М.Ю. Массоперенос электрическим полем. Ростов-на-Дону: ИздательствоРостовского Университета, 2005. 215 с.
[4] Рождественский Б.Л., Яненко Н.Н. Системы квазилинейных уравнений. М.: Нау-ка, 1978. 668 с.
Elaeva M.S. Separation of two-component mixture under action of electric field . Theseparation of two-component mixture by an electric field is investigated. We assume thatmixture conductivity is strongly depended on concentration of its components. The systemof equations described this process is transformed to Riemann invariants and is analyzed forthe case of hyperbolicity. Various initial concentration distributions are considered. To studyevolution of these distributions and interactions between strong and weak discontinuity themethod of characteristics is used.
О КИНЕТИЧЕСКОЙ ПРИРОДЕ ГИСТЕРЕЗИСНЫХ ЯВЛЕНИЙПРИ МАРТЕНСИТНЫХ ФАЗОВЫХ ПРЕВРАЩЕНИЯХ
Еремеев В.А.∗, Фрейдин А.Б.∗∗∗ Южный федеральный университет и Южный научный центр РАН
∗ Институт проблем машиноведения РАН, Санкт-Петербург
Предлагается простейшая модель фазовых превращений, демонстрирующая кинети-ческую природу гистерезисных явлений, наблюдаемых при деформировании материалов,претерпевающих фазовые превращения. На примере одномерной модели показывается,что гистерезисные явления могут быть связаны с несоответствием скоростей деформи-рования и характерных скоростей развития новой фазы.
Отличительной особенностью структурных превращений типа мартенситныхпревращений в сплавах с эффектом памяти формы является деформационный ги-стерезис [1, 2, 3]. Диаграмма деформирования имеет вид флажка. Верхняя грани-ца флажка соответствует прямому превращению, когда по мере деформированиявозрастает концентрация мартенситной фазы. Нижняя граница флажка соответ-ствует обратному превращению. Высота и ширина флажка зависят от темпера-туры и, вообще говоря, от скорости деформирования. Различные исследованиякинетики фазовых превращений проводились в [4]–[12]. Кинетический критерийиспользовался при исследовании устойчивости [13, 14].
Рассмотрим стержень x ∈ [0, L] из материала, претерпевающего фазовое пре-вращение. Обозначим u(x) – перемещение точки x, ε = ∂u/∂x – деформация.Полагаем, что свободная энергия на единицу длины стержня имеет вид
f(ε) =
1
2C−ε2 ε ≤ ε,
1
2C+(ε− εp)2 + γ ε > ε,
(1)
где C± – модули Юнга фаз “±”, εp – собственная деформация фазового превраще-ния, γ – энергетический параметр, зависящий от температуры и играющий рольтемпературы. Деформация ε разделяет области определения фаз и определяетсяиз равенства плотностей энергии:
C−ε2 = C+(ε− εp)2 + 2γ.
На концах стержня заданы перемещения u(0) = 0, u(L) = uL. В результате фа-зового превращения часть (части) стержня переходит в новое фазовое состояние.Пусть pL (p ∈ [0, 1]) – общая длина, занятая фазой “+”, ε+ и ε− – деформации наотрезках, занятых фазами “+” и “−” соответственно. Тогда в случае равновесныхдвухфазных состояний должны выполняться следующие условия:
(1− p)ε− + p ε+ = ε, (2)σ = C−ε− = C+(ε+ − εp), (3)
χ , [f ]− σ[ε], (4)

О кинетической природе гистерезисных явлений ... 73
где квадратными скобками обозначен скачок величины в результате фазового пре-вращения, [ε] = ε+ − ε−, (4) – термодинамическое условие, которое после неслож-ных преобразований приводится к виду, аналогичному виду, записанному в трех-мерном случае для тензорных величин деформаций и модулей упругости,
χ = γ +1
2B−1
1 (εp)2 +1
2(C−1
1 + B−)(Q−e)2 = 0, (5)
гдеQ− = (C−1
1 + (1− p)B−)−1, e = ε− C−11 C+εp.
Уравнение (5) определяет зависимость равновесной концентрации новой фа-зы p от средних деформаций ε. Учет этой зависимости приводит к тому, что натраектории фазового превращения напряжение постоянно:
σ = σ∗1,2 = − εp
B1
±√√√√ 1
B1
(2γ +
(εp)2
B1
). (6)
Превращение происходит при ε ∈ [ε(0)0 , ε
(1)0 ], где
ε(0)0 =
σ∗
C−(p = 0), ε
(1)0 =
2γ
σ∗+
σ∗
C−− εp(p = 1),
a σ∗1,2 определены формулами (6).Если термодинамическое условие равновесия не выполняется, то χ 6= 0 явля-
ется термодинамической силой. Тогда в приближении линейной термодинамикиизменение концентрации новой фазы происходит согласно кинетическому уравне-нию, аналогичному уравнению (1.2),
p = −Lχ(p, ε, γ), p ∈ [0, 1], (7)
где точка означает дифференцирование по времени t. Кинетическое уравнение (7)решается при начальных условиях
t = t0, p = p0, ε = ε0,
и заданном законе изменения средних деформаций ε = ε(t) и/или температурыγ = γ(t).
На рис. 1 приведены зависимости напряжений от деформации при растяжениис постоянной скоростью при трех значениях γ, т. е. при трех разных темпера-турах, в случае C+ > C−. Горизонтальные участки соответствуют равновесномурешению. При уменьшении скорости растяжения флажки сужаются и сходятся кравновесному решению. Отметим, что характер изменения диаграмм растяженияпри изменении температуры γ зависит от соотношения модулей упругости.
Полученные закономерности согласуются с экспериментальными данными иобъясняют кинетическую природу гистерезисных явлений при деформированииматериалов, претерпевающих фазовые превращения. Вместе с тем представляется
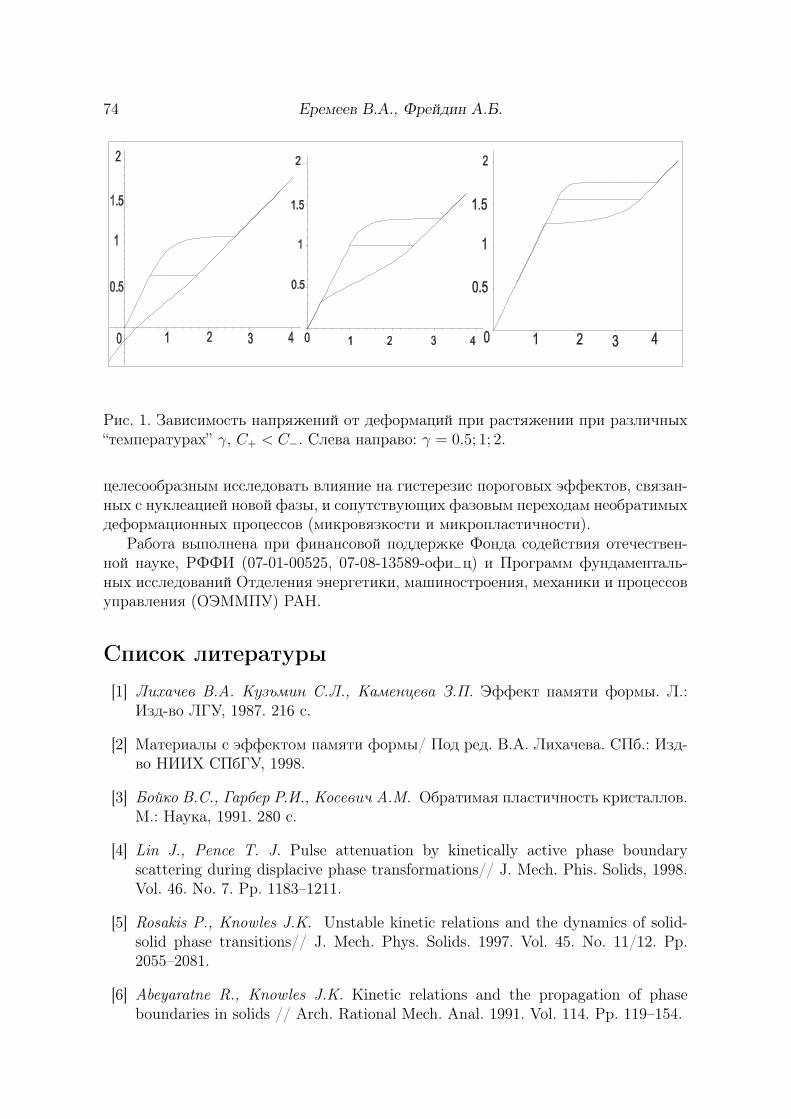
74 Еремеев В.А., Фрейдин А.Б.
Рис. 1. Зависимость напряжений от деформаций при растяжении при различных“температурах” γ, C+ < C−. Слева направо: γ = 0.5; 1; 2.
целесообразным исследовать влияние на гистерезис пороговых эффектов, связан-ных с нуклеацией новой фазы, и сопутствующих фазовым переходам необратимыхдеформационных процессов (микровязкости и микропластичности).
Работа выполнена при финансовой поддержке Фонда содействия отечествен-ной науке, РФФИ (07-01-00525, 07-08-13589-офи−ц) и Программ фундаменталь-ных исследований Отделения энергетики, машиностроения, механики и процессовуправления (ОЭММПУ) РАН.
Список литературы
[1] Лихачев В.А. Кузьмин С.Л., Каменцева З.П. Эффект памяти формы. Л.:Изд-во ЛГУ, 1987. 216 с.
[2] Материалы с эффектом памяти формы/ Под ред. В.А. Лихачева. СПб.: Изд-во НИИХ СПбГУ, 1998.
[3] Бойко В.С., Гарбер Р.И., Косевич А.М. Обратимая пластичность кристаллов.М.: Наука, 1991. 280 с.
[4] Lin J., Pence T. J. Pulse attenuation by kinetically active phase boundaryscattering during displacive phase transformations// J. Mech. Phis. Solids, 1998.Vol. 46. No. 7. Pp. 1183–1211.
[5] Rosakis P., Knowles J.K. Unstable kinetic relations and the dynamics of solid-solid phase transitions// J. Mech. Phys. Solids. 1997. Vol. 45. No. 11/12. Pp.2055–2081.
[6] Abeyaratne R., Knowles J.K. Kinetic relations and the propagation of phaseboundaries in solids // Arch. Rational Mech. Anal. 1991. Vol. 114. Pp. 119–154.
О кинетической природе гистерезисных явлений ... 75
[7] Abeyaratne R., Knowles J.K. Evolution of phase transitions. A continuum theory.Cambridge, New York, Melbourne et al.: Cambridge University Press, 2006. 241 p.
[8] Levitas V.I. Structural changes without stable intermediate state in inelasticmaterial. Part I. General thermomechanical and kinetic approaches//International Journal of Plasticity. 2000. Vol. 16. Pp. 805–849.
[9] Abeyaratne R., Knowles J. K. On the kinetics of an austenite→martensite phasetransformation induced by impact in a Cu-Al-Ni shape memory alloy// ActaMaterialia. 1997. Vol. 45. Pp. 1671–1683.
[10] Bhattacharya K. Phase boundary propagation in a heterogeneous body// Proc.R. Soc. Lond. A. 1999. Vol. 455. Pp. 757–766.
[11] Le K. C. On kinetics of hysteresis// Continuum Mech. Thermodyn. 2007. Vol. 18.Pp. 335–342.
[12] Abeyaratne R., Knowles J. K. Stress-induced phase transitions in elastic solids//Computational Mechanics. 1999. Vol. 22. Pp. 429–436.
[13] Еремеев В.А., Фрейдин А.Б., Шарипова Л.Л. О неединственности и устой-чивости в задачах равновесия упругих двухфазных тел// Докл. РАН. 2003.Т. 391. 2. С. 189–193.
[14] Еремеев В.А., Фрейдин А.Б., Шарипова Л.Л. Об устойчивости равновесиядвухфазных упругих тел // ПММ. 2007. Т. 71. Вып. 1. С. 66-92.
Eremeyev V.A., Freidin A.B. On the kinetic nature of hysteresis phenomena of phasetransitions of martensate type bending of plates made of functionally graded materials. Thepaper presents the results of modelling of phase transitions taking into account the kineticprocesses.

РАЗВИТИЕ ТРЕЩИНОПОДОБНЫХ ДЕФЕКТОВ В ЦИЛИНДРАХИЗ НЕОРГАНИЧЕСКОГО СТЕКЛА ПРИ ЕГО ЗАКАЛКЕ
Жорник А.И., Жорник В.А.∗, Савочка П.А. ∗∗∗ Таганрогский государственный педагогический институт, Таганрог∗∗ Таганрогский технологический университет при ЮФУ, Таганрог
Рассматривается процесс развития трещиноподобного дефекта в цилиндре из неор-ганического стекла при его закалке, который моделируется поперечной соосной диско-образной трещиной.
При остывании цилиндра от температур выше температуры стеклования вблизи осицилиндра возникают растягивающие внутренние напряжения, которые могут вызватьразвитие трещиноподобного дефекта до размеров, опасных при дальнейшей эксплуата-ции изделия. Устанавливается зависимость между интенсивностью охлаждения цилин-дра начальным и конечным размерами указанного трещиноподобного дефекта.
Цилиндрический образец стекла довольно большой длины с поперечной со-осной дискообразной трещиной, свободной от нагрузок, равномерно нагретый дотемпературы T0 выше Tg (температура при которой резко изменяется вязкостьстекла), подвергается охлаждению с цилиндрической поверхности путем теплооб-мена со средой температуры θ. В соответствие с режимом охлаждения в образцев каждый момент времени по радиусу устанавливается какое-то распределениетемператур. При этом в начальные моменты времени, когда поле температур вцилиндре выше Tg, возникающие термоупругие напряжения рассеиваются. Релак-сация напряжений сопровождается неравномерным распределением по радиусуобразца межмолекулярных расстояний в изотермических цилиндрических слоях.Межмолекулярные расстояния в поверхностных, относительно холодных слоях бу-дут меньше, чем во внутренних горячих слоях. В связи с этим количество молекулв поверхностном слое будет наибольшим, уменьшаясь по мере перемещения вглубьцилиндра. Причем этот градиент числа молекул будет соответствовать градиентутемператур, но с противоположным знаком. При переходе стекла в твердое состо-яние (при температуре Tg) градиент числа молекул в каждом слое фиксируется(замораживается) и остается при дальнейшем охлаждении постоянным [1]. Та-ким образом, изменение плотности числа микрочастиц по радиусу соответствуетнекоторой фиктивной температуре Φ(r), которая определяется из соотношения
dΦ(r)
dr= − ∂
∂rT (r, t) , (1)
приT (r, t) = Tg, (2)
где T (r, t) — температурное поле в цилиндре (температурный профиль в различ-ные моменты времени t).
Фиктивная температура Φ(r) порождает внутренние закалочные напряжения,когда образец, охлаждаясь, принимает температуру среды. Вблизи оси эти напря-жения будут растягивающими и могут вызвать рост дискообразной трещины.

Развитие трещиноподобных дефектов в цилиндрах из неорганического стекла ... 77
Температурное поле в цилиндре имеет вид [2]
T (r, t)− θ
T0 − θ= 2Bi
∞∑n=1
e−y2nFo
J0(yn)(Bi2 + y2n)
J0
(yn
r
rc
), (3)
где Bi = α0rc
λ— критерий Био; α0 — коэффициент теплообмена между цилин-
дрической поверхностью и окружающей средой; λ — теплопроводность материалацилиндра; Fo = at
r2c— критерий Фурье; a = λ
ρc— температуропроводность; ρ —
плотность; c — удельная теплоемкость материала цилиндра.В формуле (3) суммирование происходит по корням трансцендентного
уравненияyJ1(y) = BiJ0(y), (4)
где J0,1(y) — функция Бесселя от действительного аргумента первого рода нуле-вого и первого порядка соответственно.
В постановке (1)–(4) задача весьма сложна из-за сложности температурногопрофиля в цилиндре в начале его охлаждения. Однако исследование процессазакалки в случае регулярного режима охлаждения значительно упрощает этузадачу.
Регулярный режим охлаждения наступает в тот момент tp , начиная с кото-рого можно пренебречь в (3) всеми членами ряда вследствие их малости, кромепервого, т.е.
T (r, t)− θ
T0 − θ= 2Bi
e−y21Fo
J0(y1)(Bi2 + y21)
J0
(y1
r
rc
), t > tp. (5)
Тогда температурное поле в цилиндре T (r, t) определяется температурой охлажда-емой поверхности T (rc, t)
T (r, t)− θ =T (rc, t)− θ
J0(y1)J0
(y1
r
rc
)(6)
и не зависит от начальной температуры T0. Кроме того, как уже было сказановыше, при таких высоких температурах скорость релаксации термоупругих на-пряжений столь велика, что за время охлаждения до Tg они релаксируют практи-чески полностью. Поэтому, начиная с некоторой температуры нагрева T0, величи-на остаточных напряжений не меняется. Этот вывод полностью подтверждаетсяданными эксперимента [1].
Для нахождения фиктивной температуры Φ(r) необходимо (5) подставить в (1)с учетом (2). Тогда с точностью до константы искомая функция находится в виде:
Φ(r) = (Tg − θ) ln J0
(y1
r
rc
)+ C. (7)
Подставляя фиктивную температуру в выражения для термоупругих напряже-ний [3] найдем осевое напряжение σT
zz(ρ,Bi), при относительно малых Bi(Bi < 5),которое понадобится в дальнейшем
σ∗zz(ρ,Bi) =σT
zz(ρ,Bi)(1− ν)
αT (Tg − θ)=
Bi
8
(1− 2ρ2
), (8)

78 Жорник А.И., Жорник В.А., Савочка П.А.
где σTzz(ρ,Bi) — осевое напряжение; ρ = r/rc — относительный радиус цилиндра;
E — модуль Юнга материала цилиндра; ν — коэффициент Пуассона; αT — коэф-фициент линейного термического расширения стекла.
Решения σTij и uT
i удовлетворяют всем граничным условиям, за исключениемусловий на берегах трещины, к которым приложена нагрузка σT
zz(ρ,Bi), в то времякак по условию задачи берега трещины свободны от нагрузок. Поэтому необходи-мо рассмотреть ещё решение задачи изотермической теории упругости σp
ij и uPi ,
для сплошного цилиндра неограниченной длины, в котором имеется поперечнаясоосная дискообразная трещина. К берегам этой трещины приложена нормаль-ная нагрузка −σT
zz(ρ,Bi). Второе решение в сумме с первым удовлетворяет всемграничным условиям, в том числе и на свободных от нагрузок берегах трещины.
В этой задаче граничные условия для полубесконечного цилиндра (одна издвух частей неограниченного цилиндра, разрезанного плоскостью расположениядискообразной трещины), задаются в следующем виде:
1) на поверхности цилиндра:
σPrz(ρ, z, Bi) = 0, ρ = 1, 0 < z < ∞, (9)
uPr (ρ, z, Bi) = 0, ρ = 1, 0 < z < ∞, (10)
2) на торце:σP
rz(ρ, z, Bi) = 0, 0 < ρ < 1, z = 0, (11)
которое является сквозным, а также смешанное граничное условие
σPzz(ρ, z, Bi) = −σT
zz(ρ,Bi), 0 < ρ < α, z = 0, (12)
uPz (ρ, z, Bi) = 0, α < ρ < 1, z = 0. (13)
Поставленная задача (9)–(13) сводится к решению интегрального уравненияФредгольма второго рода относительно функции Φ∗(τ, Bi), имеющего вид [3]:
Φ∗ (τ, Bi)−α∫
0
Φ∗ (v,Bi) K (τ, v) dv =
τ∫
0
σ∗zz (ρ,Bi) ρdρ√τ 2 − ρ2
, 0 < τ < α, (14)
где α = rd/rc — относительный радиус дискообразной трещины;
K(τ, v) = 4π2
∞∫0
K1(ξ)I1(ξ)
sh ξτ sh ξv dξ — ядро интегрального уравнения.
Представляя в соответствии с (8) функцию Φ∗(τ, Bi) в виде
Φ∗(τ, Bi) =Bi
8Φ0(τ)− Bi
4Φ2(τ) (15)
и подставляя ее в интегральное уравнение (14) для i-го члена, получим:
Φ2i(τ)−α∫
0
Φ2i(v)K(τ, v)dv =
τ∫
0
ρ2i+1dρ√τ 2 − ρ2
, i = 0, 1. (16)
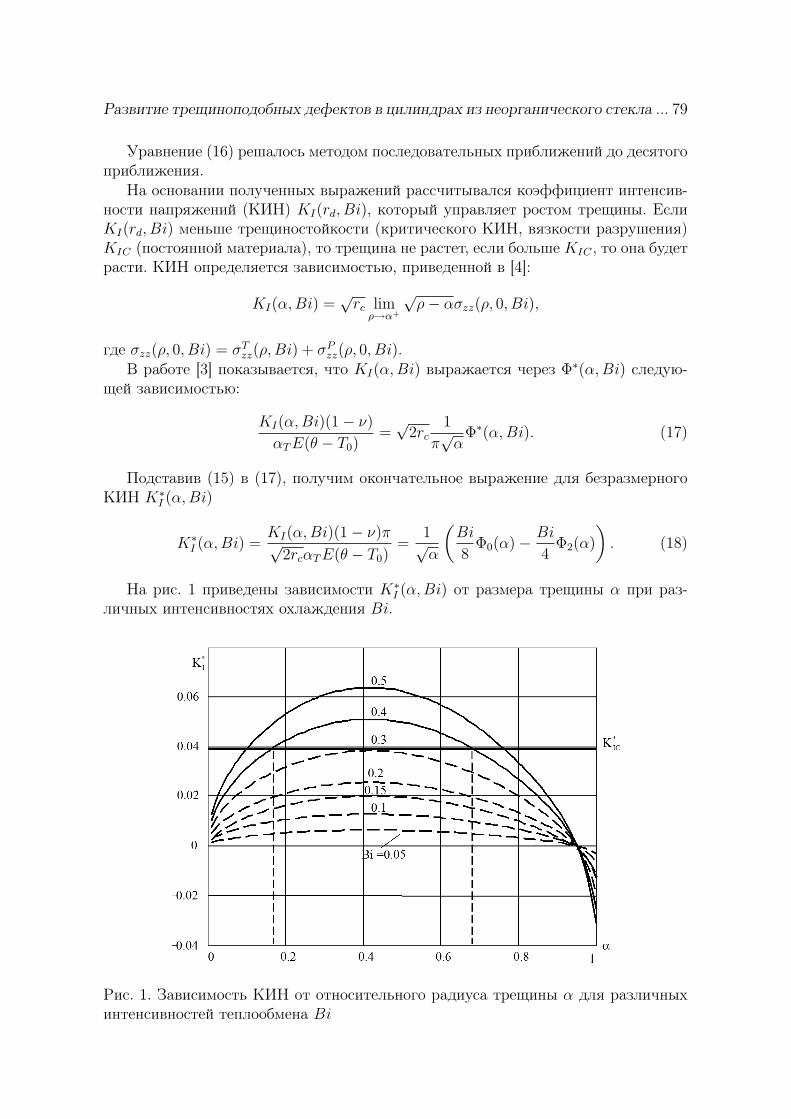
Развитие трещиноподобных дефектов в цилиндрах из неорганического стекла ... 79
Уравнение (16) решалось методом последовательных приближений до десятогоприближения.
На основании полученных выражений рассчитывался коэффициент интенсив-ности напряжений (КИН) KI(rd, Bi), который управляет ростом трещины. ЕслиKI(rd, Bi) меньше трещиностойкости (критического КИН, вязкости разрушения)KIC (постоянной материала), то трещина не растет, если больше KIC , то она будетрасти. КИН определяется зависимостью, приведенной в [4]:
KI(α,Bi) =√
rc limρ→α+
√ρ− ασzz(ρ, 0, Bi),
где σzz(ρ, 0, Bi) = σTzz(ρ,Bi) + σP
zz(ρ, 0, Bi).В работе [3] показывается, что KI(α,Bi) выражается через Φ∗(α, Bi) следую-
щей зависимостью:
KI(α,Bi)(1− ν)
αT E(θ − T0)=√
2rc1
π√
αΦ∗(α, Bi). (17)
Подставив (15) в (17), получим окончательное выражение для безразмерногоКИН K∗
I (α, Bi)
K∗I (α,Bi) =
KI(α, Bi)(1− ν)π√2rcαT E(θ − T0)
=1√α
(Bi
8Φ0(α)− Bi
4Φ2(α)
). (18)
На рис. 1 приведены зависимости K∗I (α, Bi) от размера трещины α при раз-
личных интенсивностях охлаждения Bi.
Рис. 1. Зависимость КИН от относительного радиуса трещины α для различныхинтенсивностей теплообмена Bi
80 Жорник А.И., Жорник В.А., Савочка П.А.
Проанализируем результаты расчета K∗I (α, Bi), приведенные на рис. 1, задав
постоянную материала цилиндра трещиностойкость KIC = 0, 04 (горизонтальнаясплошная линия).
Тогда ни одна дискообразная трещина при относительно малых интенсив-ностях теплообмена Bi < 0, 3 расти не будут. Однако увеличение интенсив-ности теплообмена приводит к росту трещиноподобного дефекта. В частности,при Bi = 0,4 дискообразный дефект, имеющий начальный относительныйрадиус ∼ 0,17, прорастет до конечного относительного радиуса ∼ 0,68. Такиепрорастания трещиноподобных дефектов необходимо учитывать при различныхтермообработках, в частности закалки цилиндрических деталей, изготовленныхиз неорганического стекла.
Работа выполнена на материале исследований, полученных в рамках програм-мы “Фундаментальные исследования и высшее образование” (BRHE) Министер-ства образования и науки РФ и Американского фонда гражданских исследований(CRDF) — код проекта Р.Н.П. 2.22.3.10012.
Список литературы[1] Бартенев Г.М. Механические свойства и тепловая обработка стекла. М.: Госстрой-
издат, 1960. 166 с.
[2] Бартенев Г.М., Жорник А.И. Температурные напряжения в стеклянном покрытиина металлических трубах // Физика и химия обработки материалов, 1972. 2.С. 100–108.
[3] Жорник В.А., Карташов Э.М. Рост осесимметричных трещин при механических итепловых воздействиях. Таганрог: ТГПИ, 2003. 143 с.
[4] Sneddon I.N., Tait R.J. The effect of a penny-shaped crack on the distribution of stressin a circular cylinder // Int. J. Engng. Sci., 1963. V. 1. P. 391–406.
Zhornik A.I., Zhornik V.A., Savochka P.A. Crack-like Defect Propagation inInorganic Glass Cylinders under cylinder under hardening is analyzed. The defect is modeledas co-axial penny-shaped crack. If the initial temperature of the cooled cylinder is higher thanthe one of vitrification then expanding inner stresses arise near cylinder axis which may causecrack-like defect expansion up to the sizes dangerous for further use of the cylinder product.Relation between cooling intensity, initial and finite defect dimensions is discovered.
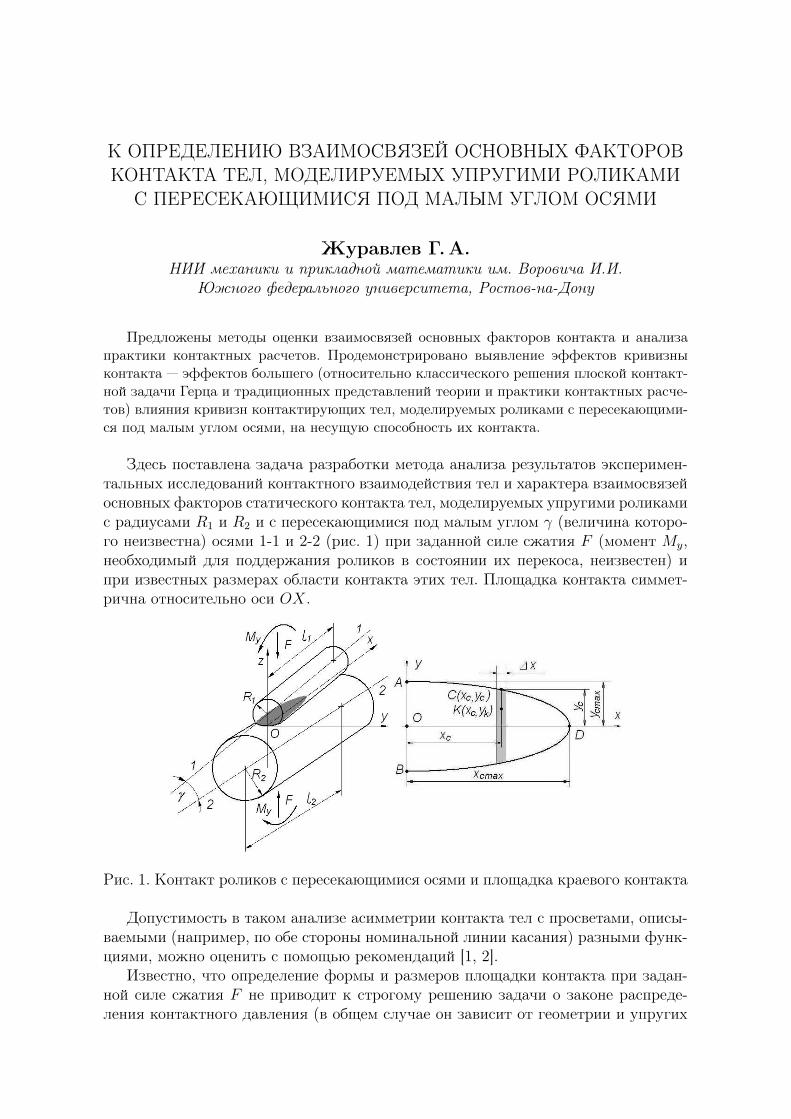
К ОПРЕДЕЛЕНИЮ ВЗАИМОСВЯЗЕЙ ОСНОВНЫХ ФАКТОРОВКОНТАКТА ТЕЛ, МОДЕЛИРУЕМЫХ УПРУГИМИ РОЛИКАМИ
С ПЕРЕСЕКАЮЩИМИСЯ ПОД МАЛЫМ УГЛОМ ОСЯМИ
Журавлев Г.А.НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону
Предложены методы оценки взаимосвязей основных факторов контакта и анализапрактики контактных расчетов. Продемонстрировано выявление эффектов кривизныконтакта — эффектов большего (относительно классического решения плоской контакт-ной задачи Герца и традиционных представлений теории и практики контактных расче-тов) влияния кривизн контактирующих тел, моделируемых роликами с пересекающими-ся под малым углом осями, на несущую способность их контакта.
Здесь поставлена задача разработки метода анализа результатов эксперимен-тальных исследований контактного взаимодействия тел и характера взаимосвязейосновных факторов статического контакта тел, моделируемых упругими роликамис радиусами R1 и R2 и с пересекающимися под малым углом γ (величина которо-го неизвестна) осями 1-1 и 2-2 (рис. 1) при заданной силе сжатия F (момент My,необходимый для поддержания роликов в состоянии их перекоса, неизвестен) ипри известных размерах области контакта этих тел. Площадка контакта симмет-рична относительно оси OX.
Рис. 1. Контакт роликов с пересекающимися осями и площадка краевого контакта
Допустимость в таком анализе асимметрии контакта тел с просветами, описы-ваемыми (например, по обе стороны номинальной линии касания) разными функ-циями, можно оценить с помощью рекомендаций [1, 2].
Известно, что определение формы и размеров площадки контакта при задан-ной силе сжатия F не приводит к строгому решению задачи о законе распреде-ления контактного давления (в общем случае он зависит от геометрии и упругих
82 Журавлев Г.А.
свойств материалов контактирующих тел) по этой площадке. Однако, посколькуточный закон распределения контактного давления для многих реальных тел неиз-вестен и существующие аналитические решения являются нестрогими, то выводыо взаимосвязях основных факторов контакта в таких случаях можно обосноватьтолько экспериментальным путем или с использованием численных методов. Вы-полнение этих исследований на базе численных методов весьма трудоемко и неисключает необходимости проведения экспериментальных исследований.
Физические соображения, вытекающие из малости угла перекоса γ, позволяютне учитывать его влияние на величину приведенного радиуса кривизны ρ упру-гих роликов с перекосом осей. Принимаем, что при контактировании упругих телотсутствует трение на поверхности контакта.
Метод построен на аналогии с классическим решением пространственной кон-тактной задачи Герца (согласно которому контактное давление определено, еслиизвестны сила сжатия F и размеры полуосей эллиптической площадки контакта aи b) и на выводах из анализа практики контактных расчетов тел, моделируемыхупругими роликами с перекосом осей [3]:
• об универсальной применимости решения плоской контактной задачи Герцав расчетной практике только в задачах определения нормальных контакт-ных напряжений на поверхности контакта с известной величиной удельнойнагрузки q;
• о зависимости напряженно-деформированного состояния (НДС), вида отказаи характера его изменения (на поверхности контакта или в глубине тела)от значения реального коэффициента KHβr неравномерности распределениянагрузки;
• о зависимости реального коэффициента KHβr от приведенной кривизны кон-тактирующих тел;
• о выявлении эффектов кривизны контакта — эффектов большего (относи-тельно классического решения плоской контактной задачи Герца и тради-ционных представлений теории и практики контактных расчетов) влияниякривизн контактирующих тел, моделируемых роликами с пересекающимисяпод малым углом осями, на несущую способность их контакта [3];
• о частном характере применимости решения плоской контактной задачи Гер-ца в задачах определения контактной прочности реальных тел (только приKHβr ≈ 1).
Согласно решению плоской контактной задачи Герца давление в каждом сече-нии полоски контакта xc = const распределяется по эллиптическому закону σH(y):
−σz(xc, y) = σH(y) = σHmax
√1− y2
b2H
, σHmax = σ(x, 0) =
√q
πηρ=
2q
πbH
, (1)

К определению взаимосвязей основных факторов контакта ... 83
где: σHmax и bH — максимальное контактное напряжение и полуширина полоскиконтакта; µi; Ei — коэффициент Пуассона и модуль Юнга материала контактиру-ющих тел (i = 1, 2);
η =2∑i
ηi; ηi =1− µ2
i
Ei
; ρ =R1R2
R1 + R2
; bH = 2
√qηρ
π; ηρ =
b2Hπ
4q.
Выберем на площадке контакта ABD (рис. 1) произвольную полоску ∆x сосредней абсциссой x. Будем считать, что при ∆x −→ 0 на этой полоске действуетпостоянная удельная нагрузка q(x). К тому же особенностью кромочного контактацилиндров с перекосом осей является неизменность значения ρ вдоль площадкиконтакта и соблюдение герцевской зависимости σHmax(x) от bH = yc: положениеточки y = 0 с максимальными нормальными напряжениями соответствует некото-рому сечению xc с максимальной полушириной yc = ycmax (например, на рис. 1 —сечение x = 0).
Под удельной нагрузкой q(x) в пространственном контакте понимаем контакт-ное давление, приходящееся на единицу длины площадки контакта по оси X. По-лагая, что сочетание понятий удельной нагрузки q(x) в пространственном кон-такте и неравномерного распределения внешней нагрузки q (с равнодействующейсилой сжатия F ) вдоль линии касания, обычно используемое в расчетах контактател с начально-линейным касанием, более всего характеризует явления начально-точечного контакта, запишем закон изменения давления поперек площадки кон-такта для сечения xc = const c bH = yc и с произвольной точкой K(xk, yk) (рис. 1):
σ(x, y) = σc(x, 0)
√1− y2
y2c
, σc(0) =2q(x)
πyc
, (2)
для определения которого достаточно знать значения q(x) и ординаты yc в расчет-ном сечении x = xc (рис. 1). Принятое нами допущение о распределении давленияв каждом сечении xc = const по эллиптическому закону σH(y) оправдано не толь-ко физическими соображениями, но и его аналогией c классическим решениемпространственной задачи Герца:
σ(x, y) = σmax
√1− x2
a2− y2
b2; σmax = σ(0, 0) =
3F
2πab; σ(0, y) = σmax
√1− y2
b2.
Если полную силу сжатия контактирующих тел F (рис. 1) определить интегри-рованием удельной нагрузки q(x) по длине площадки контакта, а q(x) выразитьчерез текущее значение yc, то можно записать:
q(x) =πy2
c
4ηρ; F =
∫ xmax
0
q(x)dx =π
4ηρ
∫ xmax
0
y2c (x)dx (3)
и получить выражение закона изменения удельной нагрузки:
q(x) =Fy2
c∫ xmax
0y2
c (x)dx. (4)

84 Журавлев Г.А.
Удельные нагрузки, максимальная qmax и средняя (при идеально-равномерномраспределении нагрузки) qm, определяют величину реального коэффициента кон-центрации контактной нагрузки KHβr вдоль номинальной линии касания контак-тирующих тел:
KHβr =qmax
qm
=ly2
cmax∫ xmax
0y2
c (x)dx; qmax =
Fy2cmax∫ xmax
0y2
c (x)dx; qm =
F
l; (5)
где: l = min(l1, l2) — длина номинальной линии касания контактирующих тел.Отсюда следует, что закон распределения контактной нагрузки вдоль площад-
ки реального контакта определен, исключительно, законом изменения величиныквадрата ординаты точек контура области контакта y2
c , а закономерности изме-нения коэффициента KHβr могут быть найдены не только решением простран-ственной задачи, но и экспериментально — с использованием полученных здесьзависимостей.
Учитывая, что (по аналогии с (2)) имеем σc(x, 0) = 2q(x)/(πyc), контактныенапряжения в точках (x, y = 0), лежащих на оси OX площадки контакта, опреде-ляем выражением:
σc(x, 0) =2Fyc
π∫ xmax
0y2
c (x)dx. (6)
Максимальное контактное напряжение σcmax на площадке контакта возникаетв сечении yc = ycmax под действием удельной нагрузки qmax:
σcmax =2Fycmax
π∫ xmax
0y2
c (x)dx. (7)
Подынтегральную функцию y2c (x) опишем уравнением кривой второго поряд-
ка, например — близкой к контуру ABD (рис. 1). Так, для сегментально-параболической площадки контакта типа [4] запишем
∫ xmax
0
y2c (x)dx =
∫ a
0
c2G
a− xc
adx =
ac2G
2; a = xcmax; cG = ycmax; σcmax =
4F
πacG
. (8)
Для полуэллиптической площадки краевого контакта получаем:
y2c = b2a2 − x2
c
a2;
∫ xmax
0
y2c (x)dx =
2ab2
3; σcmax =
3F
πab; a = xcmax; b = ycmax.
В случаях, когда линия контура площадки контакта не может быть описанакривой второго порядка, значение интеграла
∫ xmax
0y2
c (x)dx можно определить ме-тодами численного интегрирования, например, по экспериментально полученномуотпечатку площадки контакта со среднеквадратическими значениями координатточек линии ее контура xcm, ycm.
Поскольку контур площадки контакта вне плоскости x = 0 определен условиемσ(x, y) = 0, запишем закон распределения давления в зависимости от величинысилы сжатия F и от параметров области контакта. Например — для сегментально-параболической площадки контакта [4]:
σ(x, y) =4F
πcGa
√1− x
a− y2
c2G
. (9)
К определению взаимосвязей основных факторов контакта ... 85
Это означает, что для определения закона распределения давления в контак-те роликов с перекосом осей (при неизвестном значении угла перекоса) доста-точно знать величину силы их сжатия и параметры области контакта. Функцияyc = yc(x) может быть найдена, например, аппроксимацией линии известного кон-тура площадки контакта. Если известен (или задан) вид выражения для законадавления, известны длина площадки контакта, упругие свойства материалов (втом числе для случая η1 6= η2), сила сжатия F и радиусы R1,2 контактирующихтел, то более полная информация об условиях контакта может быть получена ибез дополнительных данных о функции yc = yc(x) контура площадки контакта.Например, может быть решена задача определения угла перекоса γ.
Изменяя значения исследуемых факторов, можно оценить их взаимосвязи. На-пример, для оценки зависимости допускаемой (по теории прочности σHP = const)силы сжатия Fp от параметра ρ воспользуемся выражением (7) для определения(или подбора) соответствующих величин F при различных значениях ρ. Обработ-ка полученных результатов дает зависимость Fp = Fp(ρ).
Применение предложенных методов демонстрирует выявление эффектов кри-визны контакта [3]. Эффекты кривизны контакта реализованы, например, длякардинального решения проблемы задиростойкости и значительного увеличенияресурса контактной выносливости эвольвентной цилиндрической передачи глав-ного редуктора ВР-28 привода несущего винта вертолета МИ-28.
Список литературы[1] Ковальский Б.С. Расчет деталей на местное сжатие// Харьков, Изд. ХВКИУ. 1967.
222 с.
[2] Александров В.М., Ромалис Б.Л. Контактные задачи в машиностроении// Изд. Ма-шиностроение, М., 1986. 174 с.
[3] Журавлев Г.А. Эффекты кривизны упругих тел с близким к начально-линейномукасанием// Труды III Всероссийской конференции по теории упругости. Изд. “Но-вая книга”, Ростов-на-Дону. 2004. С. 163–165.
[4] Гришин С.А. Контактное взаимодействие упругих цилиндров при перекосе осей//Сб. “Теоретическая и прикладная механика”. Изд. ХГУ. Вып. 19. Харьков. 1988.С. 32–39.
Zhuravlev G.A. On the analysis of the interrelations of base factors about contactof bodies modeled by elastic rollers with crossing axes. The methods of an estimation oninterrelations of base factors about contact and analysis of contact calculations the practicalproposed. It is shown, the revealed effects of curvature of contact (effects of much greater, incomparison with classical solution of Hertz plane contact problem and traditional opinionsof theory and practice of contact calculations) influence of curvature of bodies, modeling byelastic rollers with crossing axes on contact loading ability.

О МОДЕЛИРОВАНИИ ПЕРЕНОСА СУБСТАНЦИИ ПЛЮМОВВ КОНВЕКЕКТИВНО ДВИЖУЩЕЙСЯ СРЕДЕ
Зарецкая М.В.Кубанский государственный университет, Краснодар
Рассматривается проблема оценки воздействия со стороны верхней мантии на нижнееоснование литосферной плиты субстанциями (СБ), находящимися в конвективном дви-жении, называемыми плюмами. Для моделирования слоев Земли, включающих в себяастеносферу, верхнюю мантию и последующие слои до границы ядра Гуттенберга, при-нимается модель многослойной деформируемой среды. Субстанция плюма перемещаетсяк подошве литосферной плиты с учетом как сил Архимеда, выталкивающих плюм, так игоризонтальных движений астеносферы и других слоев. Исследуется вопрос о характерераспределения субстанции плюма на разнотипном нижнем основании коры Земли приразличных параметрах среды верхней мантии и скоростях движений.
Так как плюм достигает подошвы литосферы, растекается вдоль нее на боль-шие расстояния, концентрируется в виде слоя чистого расплава, распределенногопо большой площади, и происходит наращивание (подслаивание) коры снизу, нель-зя говорить о равномерном воздействии на нижнее основание литосферных плитсо стороны мантии.
Область движения восходящего плюма, включающую астеносферу, верхнююмантию, слой Голицина, нижнюю мантию, слой «D» [1], моделируем многослойнойдеформируемой средой. Считается, что слоистая среда, в которую попадает СБ,может в течение продолжительного времени сохранять набор слоев и их парамет-ров постоянными. В этом случае все функции, входящие в краевую задачу, можносчитать не зависящими от времени и задача значительно упрощается [2].
Нижнее основание литосферных плит является разнотипным, так как имеютсяокеанические участки, участки суши и рифтовые участки.
Если плоско-параллельное движение среды имеет характер кругового, запи-шем уравнения переноса СБ в цилиндрической системе координат
−∂ϕ
∂t+ µ
[1
ρ
∂
∂ρ
(ρ∂ϕ
∂ρ
)+
1
ρ2
∂2ϕ
∂λ2
]+ v
∂2ϕ
∂z2− vρ
∂ϕ
∂ρ− vλ
1
ρ
∂ϕ
∂λ− vz
∂ϕ
∂z− σϕ = −f.
Здесь b = (vρ, vλ, vz) — вектор скорости в цилиндрических координатах.Наряду с этим уравнением должно выполняться уравнение неразрывности вида
div b =1
ρ
∂ (ρvρ)
∂ρ+
1
ρ
∂vλ
∂λ+
∂vz
∂z= 0, b = (vρ, vλ, vz) .
Рассматривая среду с границами, параллельными плоскости z, в виде слоя тол-щины H, будем считать, что
ν∂ϕ
∂z= g(ρ, λ), z = H.
Найдем условия, при которых выполняются условия неразрывности. Рассмотримдва случая.

О моделировании переноса субстанции плюмов в конвекективно движущейся ... 87
Первый случай. Положим vz = const, vλ = vλ0ρ, vλ0 = const, vρ = cρρ−1, cρ —
постоянная, характеризующая направление скорости vρ. Этот случай отвечает ис-следованию поведения среды вблизи оси вращения как твердого тела.
Второй случай. Примем vρ = cρρ−1, vz = const, vλ = vλ0ρ
−1, vλ0 = const, cρ —постоянная, характеризующая направление скорости vρ. В этом случае рассмат-ривается удаленность от оси вращения или разреженность среды.
Используя предложенный в [3] метод исследования и решения задач переносадля конвективных движений среды, получаем решение задачи в виде:
ϕ1 (ρ) =1
2π2
c+i∞∫
c−i∞
Iv0 (uρ) ρ−α− 12 Φ1
∏ (u)√
uρ du,
g (ρ) = δ (ρ, ρ0) , G (u) = ρα+ 1
20 Kv0 (uρ0)
√uρ0,
Φ1∏ (u) = − 1
2πi
i∞∫
−i∞
Φ1 (ξ)
(ξ − u)dξ, Re u > 0,
Φ1 (u, K, z, p) = −eτ τ1[H−z] sh τ2 (H − z)
τ1 sh τ2H + τ2 ch τ2HG(u).
По результатам компьютерного моделирования можно получить значения кон-центрации субстанции мантийного вещества в зависимости от толщины слоя. Суб-станция плюма концентрируется у подошвы литосферы в виде слоя чистого рас-плава мощностью несколько километров, распределенного по большой площади.После этого уже готовый огромный резервуар магмы при определенных механи-ческих условиях может быть практически мгновенно выведен на поверхность посистеме трещин в литосфере в виде трапповых излияний.
Работа выполнена при поддержке гранта Президента НШ-4839.2006.1, грантовРФФИ (06-01-96635, 06-01-96805, 06-01-96641).
Список литературы[1] Fukao Y., Maruyama S., Obayashi M., Inoue H. Geologic implication of the whole mantle
P-wave tomography // Jour. Geol. Soc. Japan. 1994. V. 100. 1. P. 4–23.
[2] Зарецкая М.В. Моделирование процесса массопереноса в средах со сложным харак-тером распределения параметров // Вычислит. технологии. 2003. Т. 8. 5. С. 58–62.
[3] Бабешко О.М. К расчету экологических последствий спиралеобразных движений ат-мосферы и водных масс // Экологический вестник научных центров Черноморскогоэкономического сотрудничества. 2004. 3. С. 57–60.
Zaretskaya M.V. On the modeling of transfer of plummes substances in convectivemoving medium. The work considers the problem of assessing the action of the substances inconvective movement, known as plummes, from the upper mantle on the lower base of thelithosphere plate. To model the Earth’s layers including the asthenosphere, the upper mantleand subsequent layers down to the Gutenberg core boundary, the model of multi-layereddeformable medium is taken. The problem investigated is aimed to define the character ofthe plumme substances distribution on multi-type lower base of the Earth’s crust taking intoaccount different parameters of the upper mantle medium and velocities of motion.
ИССЛЕДОВАНИЕ МНОГОСЛОЙНЫХВЫСОКОЧУВСТВИТЕЛЬНЫХ АКУСТО-ЭМИССИОННЫХ
ДАТЧИКОВ
Захарова С.В., Наседкин А.В., Шихман В.М.НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону
Исследованы амплитудно-частотные характеристики (АЧХ) чувствительности мно-гослойных датчиков акустической эмиссии (АЭ). Расчеты основаны на решении линей-ных задач электроупругости с учетом демпфирующих свойств по методу конечных эле-ментов (МКЭ). Методика апробирована при анализе работы датчиков, контактирующихс объектом контроля (ОК), и получила подтверждение при экспериментальных исследо-ваниях.
Метод акустической эмиссии является одним из наиболее перспективных длядиагностики прочности и надежности, повышения безопасности эксплуатации про-мышленных объектов. Эффективность метода, определяемая такими параметра-ми, как порог чувствительности, помехозащищенность, информативность, закла-дывается на первом этапе акусто-электрического преобразования в приемных пре-образователях.
Целью настоящей работы является моделирование на основе метода конечныхэлементов многослойных приемных устройств для АЭ диагностики с учетом вза-имодействия приемных устройств с ОК. В данной работе основным расчетныминструментом является конечно-элементный пакет ANSYS и специальные мето-дики моделирования задач электроупругости с учетом демпфирующих свойств,разработанные в [1–3]. В настоящей работе затухание задается по усовершенство-ванной методике, описанной в [1], на основе учета демпфирования по Релею сиспользованием матриц масс и матриц жесткости отдельных сред, составляющихмногослойной объект исследования. В связи с этим, затухание в системе вводи-лось через механические добротности Qj каждой среды, а пьезоэлектрические идиэлектрические потери явно не учитывались. При расчетах рассматривалась осе-симметричная задача. Плотность конечно-элементного разбиения обеспечиваларазмещение по крайней мере 10 элементов на длину волны при максимальныхрассматриваемых частотах.
Реальный датчик обычно является многослойным, содержащим активный эле-мент и пассивные слои. В качестве пассивных слоев присутствуют протектор иинертная масса. Протектор располагается между рабочей стороной активного эле-мента и контролируемой средой. Кроме функции защиты активного элемента про-тектор также служит для акустического согласования пьезоэлемента и объектаконтроля. Нагружающая масса располагается с тыльной стороны активного эле-мента и служит для корректировки амплитудно-частотной характеристики пре-образователя — изменения резонансных частот или расширения полосы пропус-кания.
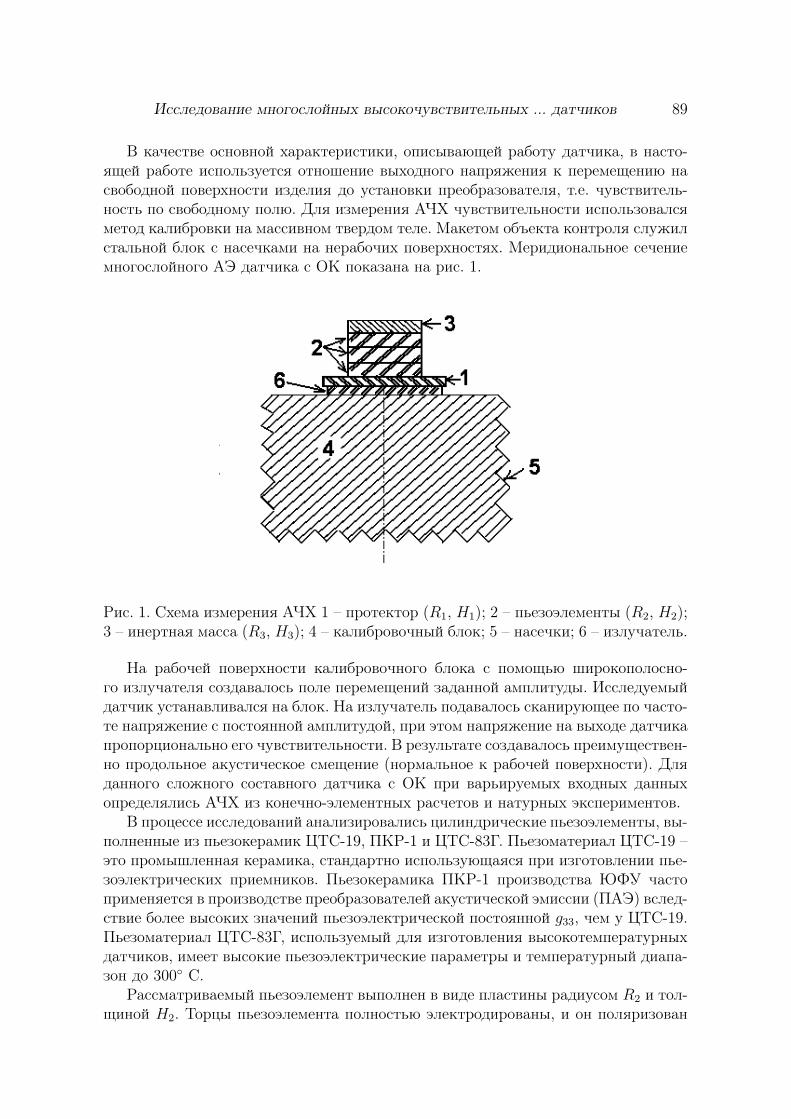
Исследование многослойных высокочувствительных ... датчиков 89
В качестве основной характеристики, описывающей работу датчика, в насто-ящей работе используется отношение выходного напряжения к перемещению насвободной поверхности изделия до установки преобразователя, т.е. чувствитель-ность по свободному полю. Для измерения АЧХ чувствительности использовалсяметод калибровки на массивном твердом теле. Макетом объекта контроля служилстальной блок с насечками на нерабочих поверхностях. Меридиональное сечениемногослойного АЭ датчика с ОК показана на рис. 1.
Рис. 1. Схема измерения АЧХ 1 – протектор (R1, H1); 2 – пьезоэлементы (R2, H2);3 – инертная масса (R3, H3); 4 – калибровочный блок; 5 – насечки; 6 – излучатель.
На рабочей поверхности калибровочного блока с помощью широкополосно-го излучателя создавалось поле перемещений заданной амплитуды. Исследуемыйдатчик устанавливался на блок. На излучатель подавалось сканирующее по часто-те напряжение с постоянной амплитудой, при этом напряжение на выходе датчикапропорционально его чувствительности. В результате создавалось преимуществен-но продольное акустическое смещение (нормальное к рабочей поверхности). Дляданного сложного составного датчика с ОК при варьируемых входных данныхопределялись АЧХ из конечно-элементных расчетов и натурных экспериментов.
В процессе исследований анализировались цилиндрические пьезоэлементы, вы-полненные из пьезокерамик ЦТС-19, ПКР-1 и ЦТС-83Г. Пьезоматериал ЦТС-19 –это промышленная керамика, стандартно использующаяся при изготовлении пье-зоэлектрических приемников. Пьезокерамика ПКР-1 производства ЮФУ частоприменяется в производстве преобразователей акустической эмиссии (ПАЭ) вслед-ствие более высоких значений пьезоэлектрической постоянной g33, чем у ЦТС-19.Пьезоматериал ЦТС-83Г, используемый для изготовления высокотемпературныхдатчиков, имеет высокие пьезоэлектрические параметры и температурный диапа-зон до 300 С.
Рассматриваемый пьезоэлемент выполнен в виде пластины радиусом R2 и тол-щиной H2. Торцы пьезоэлемента полностью электродированы, и он поляризован
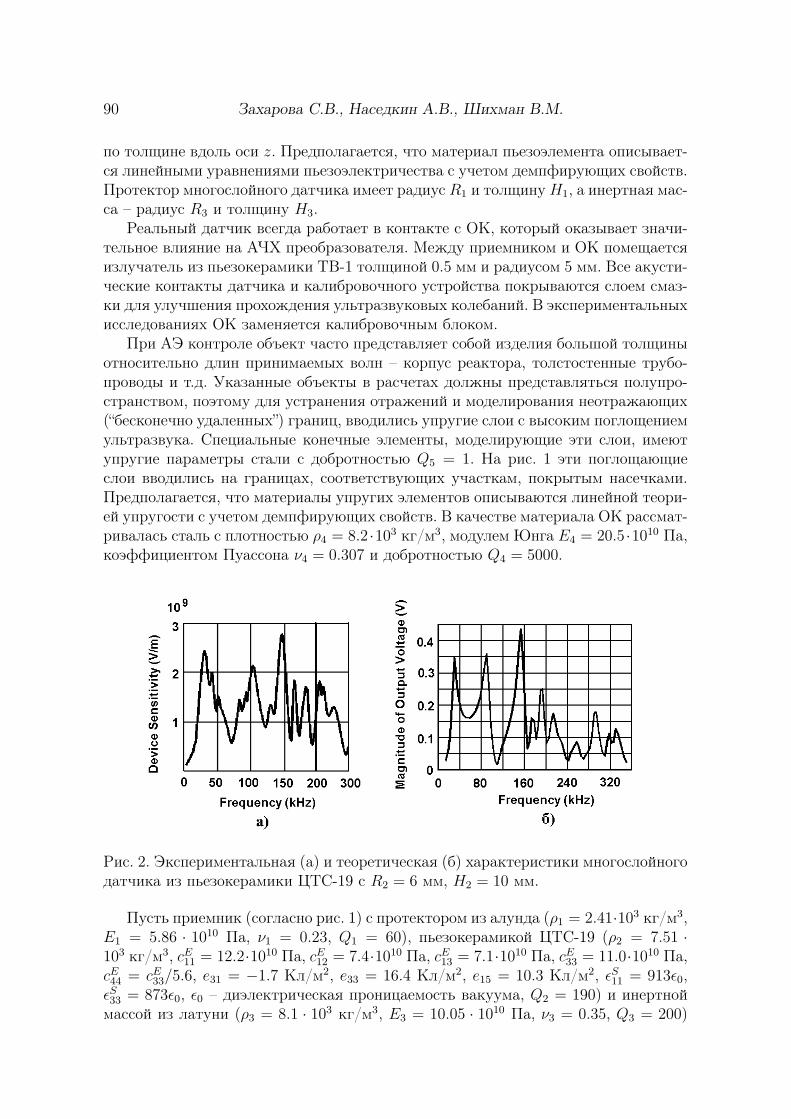
90 Захарова С.В., Наседкин А.В., Шихман В.М.
по толщине вдоль оси z. Предполагается, что материал пьезоэлемента описывает-ся линейными уравнениями пьезоэлектричества с учетом демпфирующих свойств.Протектор многослойного датчика имеет радиус R1 и толщину H1, а инертная мас-са – радиус R3 и толщину H3.
Реальный датчик всегда работает в контакте с ОК, который оказывает значи-тельное влияние на АЧХ преобразователя. Между приемником и ОК помещаетсяизлучатель из пьезокерамики ТВ-1 толщиной 0.5 мм и радиусом 5 мм. Все акусти-ческие контакты датчика и калибровочного устройства покрываются слоем смаз-ки для улучшения прохождения ультразвуковых колебаний. В экспериментальныхисследованиях ОК заменяется калибровочным блоком.
При АЭ контроле объект часто представляет собой изделия большой толщиныотносительно длин принимаемых волн – корпус реактора, толстостенные трубо-проводы и т.д. Указанные объекты в расчетах должны представляться полупро-странством, поэтому для устранения отражений и моделирования неотражающих(“бесконечно удаленных”) границ, вводились упругие слои с высоким поглощениемультразвука. Специальные конечные элементы, моделирующие эти слои, имеютупругие параметры стали с добротностью Q5 = 1. На рис. 1 эти поглощающиеслои вводились на границах, соответствующих участкам, покрытым насечками.Предполагается, что материалы упругих элементов описываются линейной теори-ей упругости с учетом демпфирующих свойств. В качестве материала ОК рассмат-ривалась сталь с плотностью ρ4 = 8.2 ·103 кг/м3, модулем Юнга E4 = 20.5 ·1010 Па,коэффициентом Пуассона ν4 = 0.307 и добротностью Q4 = 5000.
Рис. 2. Экспериментальная (а) и теоретическая (б) характеристики многослойногодатчика из пьезокерамики ЦТС-19 с R2 = 6 мм, H2 = 10 мм.
Пусть приемник (согласно рис. 1) с протектором из алунда (ρ1 = 2.41·103 кг/м3,E1 = 5.86 · 1010 Па, ν1 = 0.23, Q1 = 60), пьезокерамикой ЦТС-19 (ρ2 = 7.51 ·103 кг/м3, cE
11 = 12.2·1010 Па, cE12 = 7.4·1010 Па, cE
13 = 7.1·1010 Па, cE33 = 11.0·1010 Па,
cE44 = cE
33/5.6, e31 = −1.7 Кл/м2, e33 = 16.4 Кл/м2, e15 = 10.3 Кл/м2, εS11 = 913ε0,
εS33 = 873ε0, ε0 – диэлектрическая проницаемость вакуума, Q2 = 190) и инертноймассой из латуни (ρ3 = 8.1 · 103 кг/м3, E3 = 10.05 · 1010 Па, ν3 = 0.35, Q3 = 200)
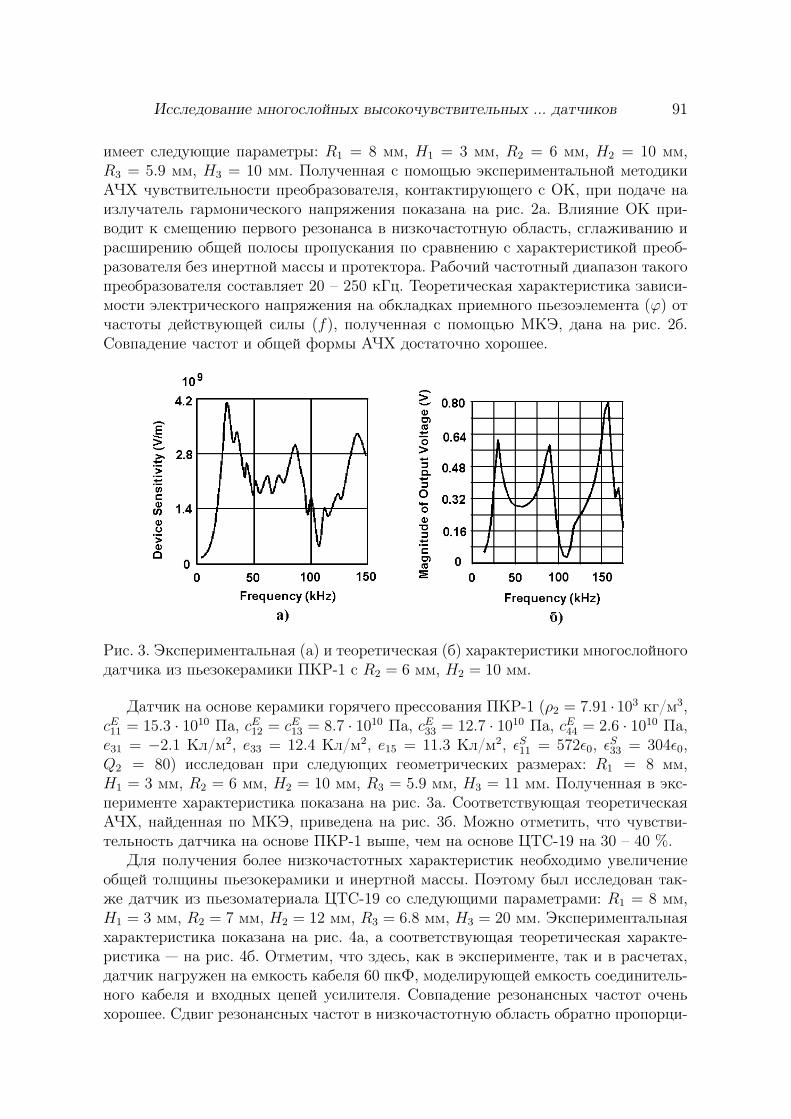
Исследование многослойных высокочувствительных ... датчиков 91
имеет следующие параметры: R1 = 8 мм, H1 = 3 мм, R2 = 6 мм, H2 = 10 мм,R3 = 5.9 мм, H3 = 10 мм. Полученная с помощью экспериментальной методикиАЧХ чувствительности преобразователя, контактирующего с ОК, при подаче наизлучатель гармонического напряжения показана на рис. 2а. Влияние ОК при-водит к смещению первого резонанса в низкочастотную область, сглаживанию ирасширению общей полосы пропускания по сравнению с характеристикой преоб-разователя без инертной массы и протектора. Рабочий частотный диапазон такогопреобразователя составляет 20 – 250 кГц. Теоретическая характеристика зависи-мости электрического напряжения на обкладках приемного пьезоэлемента (ϕ) отчастоты действующей силы (f), полученная с помощью МКЭ, дана на рис. 2б.Совпадение частот и общей формы АЧХ достаточно хорошее.
Рис. 3. Экспериментальная (а) и теоретическая (б) характеристики многослойногодатчика из пьезокерамики ПКР-1 с R2 = 6 мм, H2 = 10 мм.
Датчик на основе керамики горячего прессования ПКР-1 (ρ2 = 7.91 ·103 кг/м3,cE11 = 15.3 · 1010 Па, cE
12 = cE13 = 8.7 · 1010 Па, cE
33 = 12.7 · 1010 Па, cE44 = 2.6 · 1010 Па,
e31 = −2.1 Кл/м2, e33 = 12.4 Кл/м2, e15 = 11.3 Кл/м2, εS11 = 572ε0, εS
33 = 304ε0,Q2 = 80) исследован при следующих геометрических размерах: R1 = 8 мм,H1 = 3 мм, R2 = 6 мм, H2 = 10 мм, R3 = 5.9 мм, H3 = 11 мм. Полученная в экс-перименте характеристика показана на рис. 3а. Соответствующая теоретическаяАЧХ, найденная по МКЭ, приведена на рис. 3б. Можно отметить, что чувстви-тельность датчика на основе ПКР-1 выше, чем на основе ЦТС-19 на 30 – 40 %.
Для получения более низкочастотных характеристик необходимо увеличениеобщей толщины пьезокерамики и инертной массы. Поэтому был исследован так-же датчик из пьезоматериала ЦТС-19 со следующими параметрами: R1 = 8 мм,H1 = 3 мм, R2 = 7 мм, H2 = 12 мм, R3 = 6.8 мм, H3 = 20 мм. Экспериментальнаяхарактеристика показана на рис. 4а, а соответствующая теоретическая характе-ристика — на рис. 4б. Отметим, что здесь, как в эксперименте, так и в расчетах,датчик нагружен на емкость кабеля 60 пкФ, моделирующей емкость соединитель-ного кабеля и входных цепей усилителя. Совпадение резонансных частот оченьхорошее. Сдвиг резонансных частот в низкочастотную область обратно пропорци-
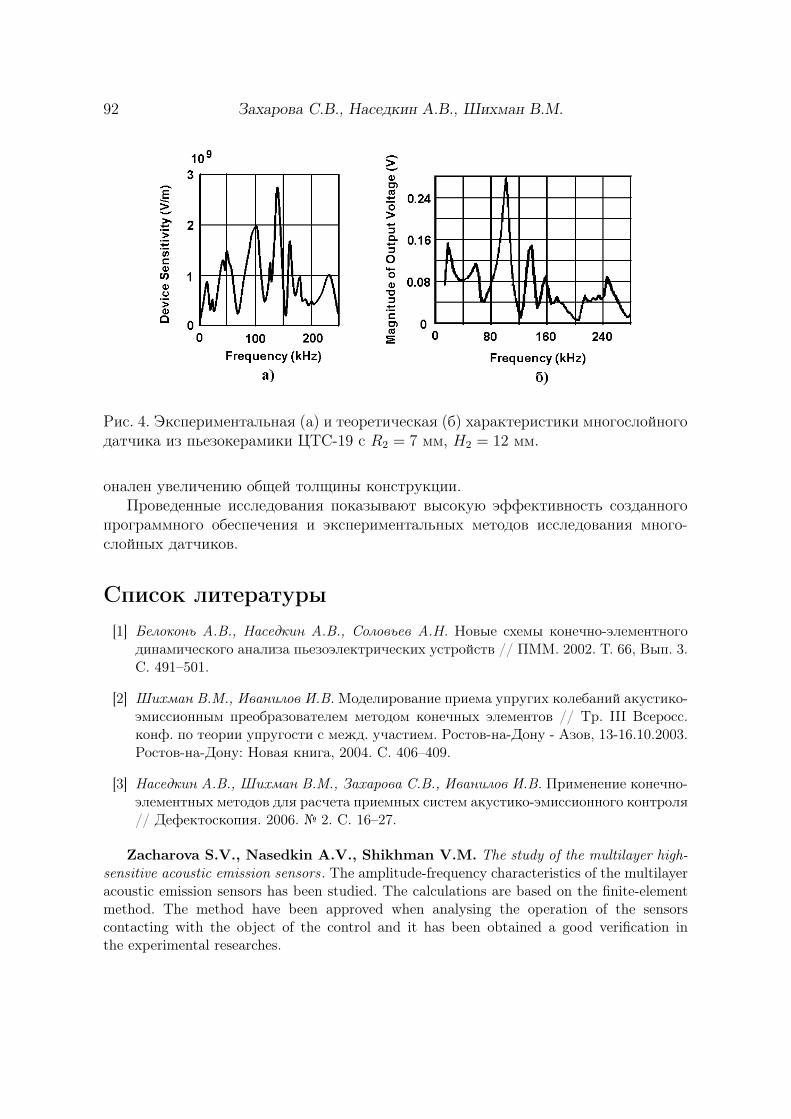
92 Захарова С.В., Наседкин А.В., Шихман В.М.
Рис. 4. Экспериментальная (а) и теоретическая (б) характеристики многослойногодатчика из пьезокерамики ЦТС-19 с R2 = 7 мм, H2 = 12 мм.
онален увеличению общей толщины конструкции.Проведенные исследования показывают высокую эффективность созданного
программного обеспечения и экспериментальных методов исследования много-слойных датчиков.
Список литературы[1] Белоконь А.В., Наседкин А.В., Соловьев А.Н. Новые схемы конечно-элементного
динамического анализа пьезоэлектрических устройств // ПММ. 2002. Т. 66, Вып. 3.С. 491–501.
[2] Шихман В.М., Иванилов И.В. Моделирование приема упругих колебаний акустико-эмиссионным преобразователем методом конечных элементов // Тр. III Всеросс.конф. по теории упругости с межд. участием. Ростов-на-Дону - Азов, 13-16.10.2003.Ростов-на-Дону: Новая книга, 2004. С. 406–409.
[3] Наседкин А.В., Шихман В.М., Захарова С.В., Иванилов И.В. Применение конечно-элементных методов для расчета приемных систем акустико-эмиссионного контроля// Дефектоскопия. 2006. 2. С. 16–27.
Zacharova S.V., Nasedkin A.V., Shikhman V.M. The study of the multilayer high-sensitive acoustic emission sensors. The amplitude-frequency characteristics of the multilayeracoustic emission sensors has been studied. The calculations are based on the finite-elementmethod. The method have been approved when analysing the operation of the sensorscontacting with the object of the control and it has been obtained a good verification inthe experimental researches.

ИССЛЕДОВАНИЕ ПРОВОДИМОСТИ КОРОНАРНОГО РУСЛАДЛЯ СТАЦИОНАРНОГО И ВОЛНОВОГО КРОВОТОКА
Зенин О.К.∗, Кизилова Н.Н.∗∗, Филиппова Е.Н.∗∗∗Донецкий национальный медицинский университет, Украина
∗∗Харьковский национальный университет им. В.Н. Каразина, Украина
Приведены результаты расчетов стационарной и волновой проводимости русла коро-нарных артерий человека на основании результатов измерений на пластмассовых слепкахрусел. Показано, что проводимость отдельных ветвей коронарного русла сильно варьиру-ет и зависит от диаметра питающей артерии ветви. При этом имеет место согласованиепроводимостей смежных ветвей, так что по мере их объединения в общее коронарноерусло появляются протяженные участки с практически постоянной проводимостью, чтообеспечивает одинаковые условия для кровоснабжения соответствующих областей серд-ца. Показано, что в бифуркациях, которые оптимальны по отношению к стационарно-му току крови, коэффициент отражения волн близок к нулю (согласование волновыхпроводимостей). По мере объединения артериальных сегментов волновая проводимостьрусла увеличивается за счет уменьшения коэффициента отражения волн, который послеопределенного числа ветвлений становится отрицательным, что обеспечивает дополни-тельный приток крови в русло за счет подсасывающего эффекта.
Особенности стационарного тока крови по коронарному руслу (КР) и распро-странение волн давления зависят от геометрии русла, поэтому недостаточностикровоснабжения, приводящие к ишемии отдельных областей миокарда, должныанализироваться на основе представлений о функциональной структуре КР. Влитературе широко обсуждается наличие геометрических факторов риска, кото-рые определяют изменения гемодинамики и развитие соответствующих патоло-гий. Так, степень поражения атеросклерозом коррелирует с относительным диа-метром сосуда и углом ветвления артерии, расположенной выше по течению, амаксимальная толщина стенки пораженной артерии — с кривизной и углом ветв-ления артериального сегмента [1], однако механизмы развития патологий остаютсядо конца не выясненными. Недостаточно исследованы также особенности распре-деления кровотока между отдельными участками и распространения пульсовыхволн. В данной работе приведены результаты расчетов проводимости КР и егоподсистем на основании морфометрических данных о строении КР. Исследован-ное КР содержит 1000 артериальных сегментов, которые моделируются толсто-стенными трубками из вязкоупругого материала. Методика получения препарата,морфометрические данные и схема строения русла приведены в [2]. Крупные сег-менты КР расположены на поверхности сердца, а малые терминальные ветви —в толще сердечной мышцы, поэтому при сокращении сердца они перекрывают-ся, и кровоснабжение миокарда происходит в диастолу, когда сердечная мышцарасслаблена и коронарные сосуды раскрыты. Форма входной волны для расчетовзадается на основе результатов регистрации кривых давления на входе в КР спомощью катетера [3].

94 Зенин О.К., Кизилова Н.Н., Филиппова Е.Н.
При расчетах стационарной проводимости принималось, что течение в каждомартериальном сегменте (трубке) является пуазейлевским, и проводимость сегмен-та может быть рассчитана по формуле Yj = πd4
j/ (128ηLj), где η — вязкость крови.Условия непрерывности давления и объемного расхода в бифуркациях
P 0j
∣∣x=L0
j
= P 1j
∣∣x=0
= P 2j
∣∣x=0
, Q0j = Q1
j + Q2j
где x ∈ [0; Lj] — продольная координата, отсчитываемая от входного сечения доконца j-го сегмента, а индексы 0,1,2 соответствуют материнскому и двум дочер-ним сосудам в бифуркации, приводят к законам сложения проводимостей припараллельном и последовательном соединении сосудов, аналогичным законам дляэлектрических цепей постоянного тока [4]. Методика расчета стационарной про-водимости сосудистого русла и обоснование ее применимости приведены в [4,5].Поскольку использованный способ изготовления препаратов позволял получатьслепки артерий с диаметрами d ≥ 0.1 мм, то артерии с меньшими диаметрами икапилляры моделировались терминальными элементами с проводимостями Yt [4].Принимая во внимание существенность неньютоновских свойств крови в малыхсосудах с d < 1− 2 мм (эффект Фареуса-Линдквиста) [6], используем аппроксима-цию η = aDb, где a = 0, 0074, b = 0, 107, в соответствии с которой вязкость кровиубывает от 4,5 до 2 сПз при уменьшении диаметра артерий от 10 до 0,005 мм.
В результате расчетов были получены значения проводимостей Y totk отдель-
ных ветвей КР при разных значениях Re (Yt) и Im (Yt), проводимость Y tot КР вцелом, а также зависимости Y tot (X) и Y tot
k (X), где k — номер ветви, а X — про-дольная координата, отсчитываемая вдоль самого длинного пути, образованногоартериальными сегментами, начиная от входного сечения питающей артерии КР.Величина Y tot (X) для каждого сечения с координатой X характеризует проводи-мость русла, расположенного вниз по течению от X, и определяет поступающийв него объем крови. В исследованном нами КР выделены три основных пути, об-разованные крупными артериальными сегментами [2].
Результаты расчетов показали, что проводимости отдельных подсистем КРсильно варьируют, и разброс значений составляет Yk = 9, 53 · 10−11 − 3, 15 · 10−9
(м3/с)/(Н/м2) в зависимости от числа артериальных сегментов и способа ихсоединения. Например, при последовательном соединении трубки с терминаль-ным элементом, проводимости которых Y1 и Yt соответственно, полная прово-димость Y n
1 полученной системы всегда меньше проводимости исходной трубки:Y n
1 − Y1 = −Y 21 / (Y1 + Yt) < 0. Следовательно, полная проводимость русла тем вы-
ше, чем больше в нем содержится ответвлений (параллельных соединений), а зна-чит, и путей для оттока крови. Значения безразмерных проводимостей Y
k отдель-ных ветвей КР приведены на рис. 1 a.
Если рассчитать стационарную проводимость той части КР, которая включа-ет все подсистемы, расположенные вниз по течению от участка с координатой X,то оказывается, проводимости подсистем согласованы таким образом, что чере-дование последовательных и параллельных соединений артерий КР приводит кпоявлению вдоль его главных ветвей относительно протяженных участков с по-стоянной проводимостью. Результаты, приведенные на рис. 1 б, показывают, что,например, вдоль пути 3 имеются три протяженных участка, которые включают
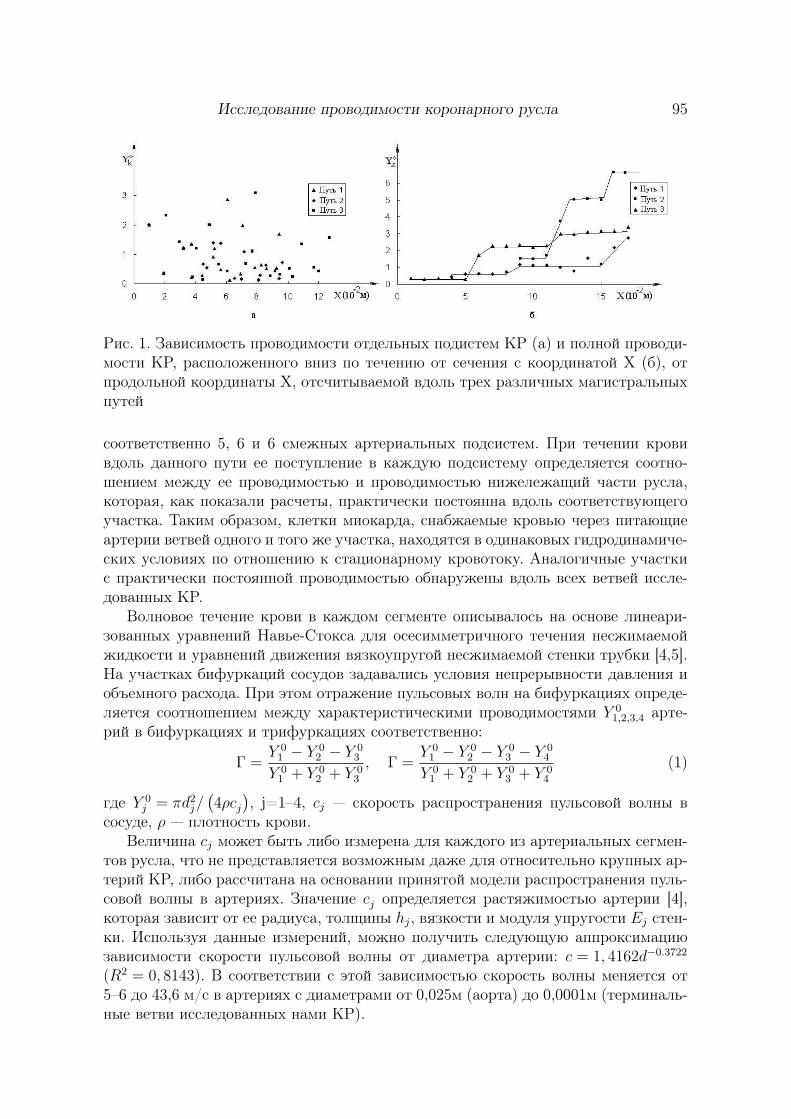
Исследование проводимости коронарного русла 95
Рис. 1. Зависимость проводимости отдельных подистем КР (а) и полной проводи-мости КР, расположенного вниз по течению от сечения с координатой Х (б), отпродольной координаты Х, отсчитываемой вдоль трех различных магистральныхпутей
соответственно 5, 6 и 6 смежных артериальных подсистем. При течении кровивдоль данного пути ее поступление в каждую подсистему определяется соотно-шением между ее проводимостью и проводимостью нижележащий части русла,которая, как показали расчеты, практически постоянна вдоль соответствующегоучастка. Таким образом, клетки миокарда, снабжаемые кровью через питающиеартерии ветвей одного и того же участка, находятся в одинаковых гидродинамиче-ских условиях по отношению к стационарному кровотоку. Аналогичные участкис практически постоянной проводимостью обнаружены вдоль всех ветвей иссле-дованных КР.
Волновое течение крови в каждом сегменте описывалось на основе линеари-зованных уравнений Навье-Стокса для осесимметричного течения несжимаемойжидкости и уравнений движения вязкоупругой несжимаемой стенки трубки [4,5].На участках бифуркаций сосудов задавались условия непрерывности давления иобъемного расхода. При этом отражение пульсовых волн на бифуркациях опреде-ляется соотношением между характеристическими проводимостями Y 0
1,2,3,4 арте-рий в бифуркациях и трифуркациях соответственно:
Γ =Y 0
1 − Y 02 − Y 0
3
Y 01 + Y 0
2 + Y 03
, Γ =Y 0
1 − Y 02 − Y 0
3 − Y 04
Y 01 + Y 0
2 + Y 03 + Y 0
4
(1)
где Y 0j = πd2
j/(4ρcj
), j=1–4, cj — скорость распространения пульсовой волны в
сосуде, ρ — плотность крови.Величина cj может быть либо измерена для каждого из артериальных сегмен-
тов русла, что не представляется возможным даже для относительно крупных ар-терий КР, либо рассчитана на основании принятой модели распространения пуль-совой волны в артериях. Значение cj определяется растяжимостью артерии [4],которая зависит от ее радиуса, толщины hj, вязкости и модуля упругости Ej стен-ки. Используя данные измерений, можно получить следующую аппроксимациюзависимости скорости пульсовой волны от диаметра артерии: c = 1, 4162d−0.3722
(R2 = 0, 8143). В соответствии с этой зависимостью скорость волны меняется от5–6 до 43,6 м/с в артериях с диаметрами от 0,025м (аорта) до 0,0001м (терминаль-ные ветви исследованных нами КР).
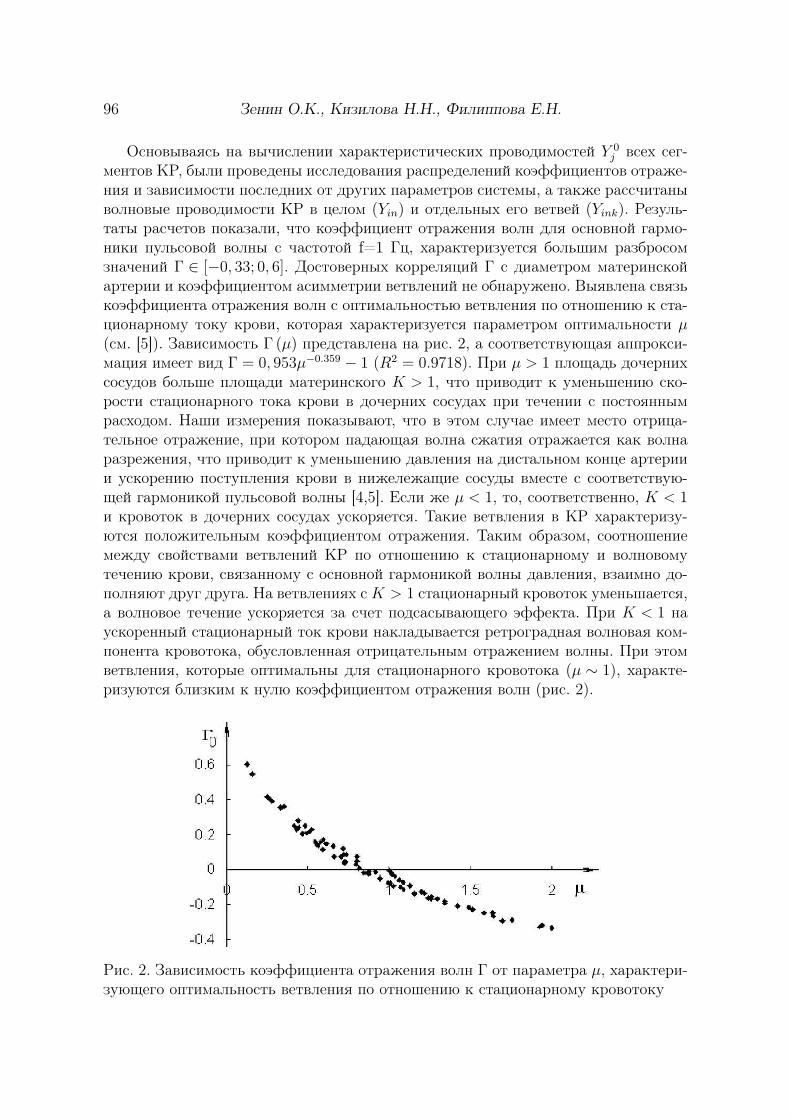
96 Зенин О.К., Кизилова Н.Н., Филиппова Е.Н.
Основываясь на вычислении характеристических проводимостей Y 0j всех сег-
ментов КР, были проведены исследования распределений коэффициентов отраже-ния и зависимости последних от других параметров системы, а также рассчитаныволновые проводимости КР в целом (Yin) и отдельных его ветвей (Yink). Резуль-таты расчетов показали, что коэффициент отражения волн для основной гармо-ники пульсовой волны с частотой f=1 Гц, характеризуется большим разбросомзначений Γ ∈ [−0, 33; 0, 6]. Достоверных корреляций Γ с диаметром материнскойартерии и коэффициентом асимметрии ветвлений не обнаружено. Выявлена связькоэффициента отражения волн с оптимальностью ветвления по отношению к ста-ционарному току крови, которая характеризуется параметром оптимальности µ(см. [5]). Зависимость Γ (µ) представлена на рис. 2, а соответствующая аппрокси-мация имеет вид Γ = 0, 953µ−0.359 − 1 (R2 = 0.9718). При µ > 1 площадь дочернихсосудов больше площади материнского K > 1, что приводит к уменьшению ско-рости стационарного тока крови в дочерних сосудах при течении с постояннымрасходом. Наши измерения показывают, что в этом случае имеет место отрица-тельное отражение, при котором падающая волна сжатия отражается как волнаразрежения, что приводит к уменьшению давления на дистальном конце артериии ускорению поступления крови в нижележащие сосуды вместе с соответствую-щей гармоникой пульсовой волны [4,5]. Если же µ < 1, то, соответственно, K < 1и кровоток в дочерних сосудах ускоряется. Такие ветвления в КР характеризу-ются положительным коэффициентом отражения. Таким образом, соотношениемежду свойствами ветвлений КР по отношению к стационарному и волновомутечению крови, связанному с основной гармоникой волны давления, взаимно до-полняют друг друга. На ветвлениях с K > 1 стационарный кровоток уменьшается,а волновое течение ускоряется за счет подсасывающего эффекта. При K < 1 наускоренный стационарный ток крови накладывается ретроградная волновая ком-понента кровотока, обусловленная отрицательным отражением волны. При этомветвления, которые оптимальны для стационарного кровотока (µ ∼ 1), характе-ризуются близким к нулю коэффициентом отражения волн (рис. 2).
Рис. 2. Зависимость коэффициента отражения волн Γ от параметра µ, характери-зующего оптимальность ветвления по отношению к стационарному кровотоку
Исследование проводимости коронарного русла 97
Таким образом, КР не является пассивным сопротивлением в артериальном де-реве человека, а геометрия КР обеспечивает ускоренное поступление крови в пита-ющие артерии отдельных ветвей (подсасывающий эффект) за счет отрицательно-го отражения волн на ветвлениях артерий. Ветвления, которые характеризуютсяблизким к нулю коэффициентом отражения волн, обладают оптимальными свой-ствами по отношению к стационарному кровотоку в смысле оптимального крите-рия Мюррея [5]. Согласование между оптимальностью сосудистой бифуркации поотношению к стационарному и волновому кровотоку обеспечивает выравниваниесуммарного кровотока за счет ускорения (замедления) волновой компоненты призамедленном (ускоренном) стационарном кровотоке из материнского в дочерниесосуды. Подобные свойства определяются наличием взаимодействия между боль-шим числом сосудов с согласованными определенным образом параметрами и,таким образом, могут быть отнесены к синергетическим эффектам.
Список литературы[1] Friedman M.H., Ding Z. Relation between the Structural Asymmetry of Coronary
Branch Vessels and the Angle at the Origin. //J.Biomech. 1998. V. 31, 3. P. 273–278.
[2] Зенин О.К., Кизилова Н.Н., Филиппова Е.Н. Исследование заканомерностей строе-ния русла коронарных артерий человека. // Биофизика. 2007. Т. 52. 4. С. 468–474.
[3] Sun Yi-Hui, Anderson T.J., Parker K.H. , Tyberg J.V. Wave-intensity analysis: a newapproach to coronary hemodynamics. // J.Appl.Physiol. 2000. V. 89, 4. P. 1636–1644.
[4] Milnor W.R. Hemodynamics. Baltimore:Williams and Wilkins. 1989. 419 p.
[5] Kizilova N.N. Modeling of Intraorgan Arterial Vasculature. II. Propagation of PressureWaves. // Biophysics. 2007. V. 52, 1. P. 77–82.
[6] Левтов В.А., Регирер С.А., Шадрина Н.Х. Реология крови. М.:Медицина, 1982.272 с.
Kizilova N.N., Philippova E.N., Zenin O.K. Investigation of conductivity of thecoronary vasculature for the steady and pulsatile blood flow. Calculation results of theconductivity and input wave admittance of the coronary vasculature basing on measurementdata obtained by morphometric study on the plastic casts are presented. It is shown thatconductivity of the separate branches of the vasculature significantly varies and depends onthe diameter of the feeding artery of the branch. The co-ordination of the conductivities ofthe adjacent branches leads to appearance of the lengthy regions with practically constantconductivity as the branches are joined into the vasculature that provides similar conditionsof blood supply to the corresponding heart regions. It is shown that when a bifurcation isoptimized for the steady blood flow the wave reflection coefficient is close to zero. As thearterial segments is joined into the coronary bed the input wave admittance increases due todecrease in wave reflection coefficient which becomes negative, that provides additional bloodinflow at the expense of the sucking effect.
ТЕРМОМЕХАНИЧЕСКИЙ РАСЧЕТ ПОДШИПНИКАСКОЛЬЖЕНИЯ СУХОГО ТРЕНИЯ С ДВУХСЛОЙНОЙ
ВТУЛКОЙ
Иваночкин П. Г.Ростовский государственный университет путей сообщения
Получено приближенное решение термоупругой контактной задачи для цилиндриче-ского подшипника скольжения с двухслойной втулкой. Предполагается, что подшипникнагревается вследствие генерации тепла в области контакта от сил кулоновского трения,хотя сами силы трения не учитываются при определении контактных давлений. Исследо-вано влияние тепловыделения на напряженно-деформированное состояние двухслойноговкладыша.
Рассматривается подшипниковый узел, включающий следующие детали:стальной вал радиуса r0, двухслойный вкладыш наружный радиус которого r3,внутренний r1, (r2 − r1 = h1 — толщина антифрикционного слоя вкладыша,r3 − r2 = h2 — толщина подложки); стальная обойма внутренний радиус ко-торой r3. Вал вдавливается во внутреннюю поверхность вкладыша силой P ивращается с постоянной угловой скоростью ω. При этом происходит изнашиваниевкладыша, сопровождающееся тепловыделением в области контакта.
Задача решается при следующих упрощающих предложениях: 1) вязкостьювтулки можно пренебречь; 2) вал и обойма жесткие; 3) образующие втулку слоижестко соединены между собой и с недеформируемой обоймой. В указанных со-единениях выполняется условие идеального теплового контакта; 4) инерционны-ми эффектами во вкладыше можно пренебречь; 5) при определении напряженно-деформированного состояния втулки используются формулы плоской линейнойтеории упругости 6) сила трения связана с контактным давлением законом Ку-лона τrθ
(θ) = fq(θ), при этом касательные напряжения τrθмало влияют на рас-
пределение контактного давления q(θ) и величину угла контакта θ0, поэтому приопределении радиальных перемещений они не учитываются.
Упругие перемещения внутренней поверхности втулки получим, используяпредложенный в [1] метод построения вырожденного (в асимптотическом смыс-ле) решения термоупругой контактной задачи для цилиндрического подшипникаскольжения сухого трения с двухслойным вкладышем. Связь между перемещени-ем точек внутренней поверхности антифрикционного слоя втулки и контактнымдавлением будет выражаться формулой
u1(θ) = Ψq(θ)− Φ(θ)(γ1 + γ2) |θ| ≤ θ0 (1)
гдеΨ = [λ1α
−12 (γ1 + γ2) + α2λ
−12 (γ1h1λ2 − γ2h2λ1)]µ− (s1 + s2)(s1s2)
−1;
µ = (1− χ)ωr1fλ−11 , γi =
(1 + νi)αTihi
1− νi
, si =2Gi(1− νi)
(1− 2νi)hi
, (i = 1, 2).

Термомеханический расчет подшипника ... 99
Здесь νi, Gi — коэффициент Пуассона и модуль сдвига слоев втулки, αTi —коэффициенты теплового расширения слоев втулки, λi — коэффициенты тепло-проводности, αi — коэффициенты теплоотдачи слоев втулки, Φ(θ) — заданное рас-пределение температуры на внутренней поверхности обоймы.
Таким образом, в случае малой толщины втулки, она работает по типу ос-нования Фусса – Винклера. Учет термоупругости приводит к появлению членасвязанного с температурой внешнего слоя втулки Φ(θ).
Для определения функции Φ(θ) нужно исследовать задачу теплопроводностидля обоймы. Из рассмотрения экстремальных данных о распределении темпера-туры на ее внутренней поверхности в первом приближении заключаем, что этораспределение дается зависимостью [2]
Φ(θ) = (D0 + D1 cos θ)(γ1 + γ2)−1
где D0 и D1 — некоторые постоянные, аппроксимирующие экспериментальныеданные. Тогда давление в зоне контакта может быть представлено в форме
q(θ) = M0 + M1 cos θ, M0 = (D0 −∆)D−1, M1 = (D1 + ∆ + δ)D−1 (2)
где
D =λ1
α2
(γ1 + γ2)µ− (s1 + s2)
s1s2
Отметим, что важным является соблюдение условия D > 0, которое являетсяусловием термосиловой устойчивости [2].
Связь между перемещением вала δ и углом контакта 2θ0 определим из условияобращения контактных давлений в нуль при θ = ±θ0.
δ =∆(1− cos θ0)− (D0 + D1 cos θ0)
cos θ0
(3)
Из формулы (3) следует
M0 + M1 cos θ0 = 0. (4)
Связь между вдавливающей силой P и углом контакта 2θ0 определим из усло-вия равновесия вала
P = r1
θ0∫
−θ0
q(θ) cos θdθ = r1[2M0 sin θ0 + M1(θ0 + frac12 sin 2θ0)] (5)
С помощью формул (4), (5) приведем выражение (2) для контактного давле-ния q(θ) к виду
q(θ) =2P (cos θ0 − cos θ)
r1(sin 2θ0 − 2θ0)(6)

100 Иваночкин П.Г.
Для средней по θ температуры на поверхности области контакта получим
T ∗1 =
1
2θ0
θ0∫
−θ0
T1(θ)dθ = µr1q∗ (7)
q∗ =1
r1
[(h1 +λ1
λ2
h2 +λ1
α2
)q∗ +1
(γ1 + γ2)µ(D0 +
sin θ0
θ0
D1)], (8)
q∗ =2P
r1(sin 2θ0 − 2θ0)(cos θ0 − sin θ0
θ0
)
где q∗ — среднее по θ контактное давление q∗ = 12θ0
θ0∫−θ0
q(θ)dθ
Воспользуемся полученным в [3] решением задачи теплопроводности для вала
T = χfωr12qλ0
−1β. (9)
где T =π/2∫−π/2
T1(θ, t)dθ – осредненная температура вала, β — безразмерная постоян-
ная, выражение которой может быть подсчитано по формулам указанной работыили работы [4]. Приравнивая между собой средние температуры втулки (7) и ва-ла (9) в области контакта, получим выражение для определения коэффициентаразделения потоков тепла
χ = 1− βr0
λB(β r0
λB+ h1
λ1+ h2
λ2+ 1
α2)
+(D0 + D1
sin θ0
θ0)
(γ1 + γ2)ωr0fq∗(β r0
λB+ h1
λ1+ h2
λ2+ 1
α2)
(10)
Момент сил кулоновского трения τrθ(θ) = fq(θ), действующих в области контакта,
определим по формуле
M = fr21
θ0∫
−θ0
q(θ)dθ = 2fr21θ0q
∗ (11)
Замечание. Определение угла контакта θ0 по заданной величине силы P про-водится с использованием обратной итерационной процедуры:
а) задаемся начальным приближением угла θ1;б) вычисляем q∗;в) вычисляем коэффициент разделения потоков тепла χ;г) по формуле (2) вычисляем M0;д) по формуле
P = r0[2M0 sin θ1 − M0
cos θ1
(θ1 + 0.5 sin 2θ1)]
вычисляем силу P ;е) на следующем шаге итерационной процедуры проводим корректировку зна-
чения угла θ1 с учетом найденного значения силы.
Термомеханический расчет подшипника ... 101
С целью анализа влияния тепловыделения на напряженно-деформированноесостояние комбинированной двухслойной втулки подшипника скольжения сухоготрения были проведены расчеты для втулки ролика кронштейна для погрузкибесколесного груза. Внутренний диаметр 16,5 мм; внешний диаметр 21 мм;длина 7 мм. Нагрузка 2500 кг. Угловая скорость вращения ω=100 об/мин(10,5 c−1); коэффициент трения f=0.03. Модули сдвига: антифрикционного слояG1=3.2 ГПа; подложки G2=30 ГПа Коэффициенты Пуассона: антифрикционногослоя ν1=0,4; подложки ν2=0,25 Коэффициенты теплопроводности: антифрик-ционного слоя λ1=0.39 Вт/(м С); подложки λ2=0.5 Вт/(м С). Коэффициентытеплового расширения: антифрикционного слоя αT1=8·10−5 (С)−1; подложкиαT2=1·10−5 (С)−1. Коэффициенты теплоотдачи: во внутренний зазор подшипникаα1=402 Вт/(м2 С); с внешней поверхности подшипника α1=36 Вт/(м2 С). Рас-смотрены два варианта исполнения вкладыша: с толщиной антифрикционногослоя 0,6 мм и 0,8 мм. Анализ полученных результатов показывает, что учеттепловыделения приводит к возрастанию максимального контактного давленияв сопряжении и уменьшению зоны контакта в обоих рассмотренных случаях.Уменьшение толщины антифрикционного слоя приводит к резкому увеличениюмаксимального контактного давления, а влияние тепловыделения на размерыплощади контакта заметно снижается.
Работа выполнена при поддержке РФФИ (гранты 05-01-00306, 06-08-01257)
Список литературы[1] Александров В.М., Губарева Е.А. Решение термоупругих контактных задач для ци-
линдрического и сферического подшипников скольжения // Трение и износ. 2005.Т. 26. 4. С. 347–357.
[2] Коваленко Е.В., Евтушенко А.А. Износ подшипника скольжения с учетом тепло-выделения от трения // Трение и износ. 1993. Т. 14. 2. С. 259–269.
[3] Бабешко В.А., Ворович И.И. К расчету контактных температур, возникающих привращении вала в подшипнике // ПМТФ.1968. 2. С. 135–137.
[4] Александров В.М., Губарева Е.А. О расчете контактных температур, возникающихпри вращении вала в подшипнике // Трение и износ. 2007. Т. 28. 1. С. 39–43.
Ivanochkin P.G. Thermomechanical calculation of a sliding bearing of dry friction withtwo-layered bearing brass. The approximate solutions of thermoelastic contact problems forcylindrical bearing of sliding with deformable two-layer bush is obtained. It is supposed thatbearings are heated up owing to generation of heat in the contact region from forces ofCoulomb’s friction though forces of friction are not taken into account at definition of contactpressure.

НЕКОТОРЫЕ ПРОБЛЕМЫ ОПТИМАЛЬНОГО УПРАВЛЕНИЯКОЛЕБАНИЯМИ ВЫСОТНЫХ СООРУЖЕНИЙ
Кабельков В.А., Кабельков А.Н., Нефедов В.В.Южно-Российский государственный технический университет
(Новочеркасский политехнический институт)
Рассмотрены некоторые проблемы оптимального управления колебаниями высотныхсооружений: внешние воздействия на высотные сооружения; исполнительные механиз-мы, обеспечивающие активное управление колебательными процессами; уравнения дви-жения; устойчивость и колебания; оптимальное управление колебаниями.
Рис. 1.
1. Внешние воздействия. Расчет высотных сооружений, проектируемых для стро-ительства в сейсмических районах, должен выполняться на основе нагрузки с уче-том сейсмических воздействий. В результате взаимодействия высотного сооруже-ния с обтекающим его потоком воздуха, возникают аэродинамические силы (лобо-вая, касательная, подъемная) и момент, пропорциональный скорости набегающе-го потока. При отрывном обтекании круглого сечения появляется периодическая(сила Кармана), ортогональная вектору относительной скорости с частотой, зави-сящей от числа Струхаля. Проекции интенсивности этих сил в безразмерном видена оси глобальной системы координат (рис. 1) определяются соотношениями [1]:
qn1 = qn0(1− 2β0(u1 cos α + u3 sin α) + β20(u
21 + u2
3))12 (cos α− u′1(u
′1 cos α+
+u′3 sin α) + β0(−u1(1− (u′1)2) + u3u
′1u′3));
qn3 = qn0(1− 2β0(u1 cos α + u3 sin α) + β20(u
21 + u2
3))12 (sin α− u′3(u
′1 cos α+
+u′3 sin α) + β0(−u1u′1u3 − u3(1− (u′3)
2)))
qk1 = qk0(1− 2β0(u1 cos α + u3 sin α) + β20(u
21 + u2
3))12 (sin α− β0u3) sin ω0τ ;
qk3 = qk0(1− 2β0(u1 cos α + u3 sin α) + β20(u
21 + u2
3))12 (cos α− β0u1) sin ω0τ.
(1)

Некоторые проблемы оптимального управления колебаниями высотных ... 103
В формулах (1) введены обозначения: V0 — скорость набегающего потока; α —угол, который она составляет с осью OX1 и безразмерные величины:
s = εl; u1 =u1
l; u3 =
u3
l; p0 =
(ρl4
EJ
) 12
; β =ρgl2
EJ
τ = p0t; ω0 =ω
p0
β0 =p0l
V0
; qn0 =cnγdV 2
0 l3
2EJ; qk0 =
ckγdV 20 l3
2EJ
(ρ — удельная плотность стержня; EJ — изгибная жесткость l — длина стержня;d — диаметр стержня; ω — частота срыва вихрей; g — гравитационная постоянная;γ — удельная плотность воздуха; cn и ck безразмерные постоянные, определяемыеопытным путем). В соответствии с новейшими исследованиями по сейсмическомурайонированию свыше четверти территории России подвержено потенциальнымсейсмическим воздействиям, требующим антисейсмических мероприятий. Самы-ми опасными в сейсмическом отношении являются Северный Кавказ, юг Сибирии дальний Восток (интенсивность 8-10 баллов). Определенную угрозу представ-ляют и 6-7 бальные зоны в густонаселенной европейской части РФ. Наибольшуюопасность для зданий и сооружений представляют поверхностные волны Лява,вызывающие наибольшие по величине смещения их оснований. При этом, в со-ответствии со СНиП-7-81*, смещения (для зданий и сооружений простой геомет-рической формы) следует принимать в горизонтальной плоскости (вдоль осей ck
и x3). Действие сейсмических нагрузок в этих направлениях следует учитыватьраздельно. В качестве математической модели перемещений грунта примем законсуммарного ряда гармоник
[x1
x3
]=
∑i
[A1i
A3j
]sin λit. (2)
При решении уравнений колебания сооружения следует ориентироваться на дей-ствие той гармоники, частота которой наиболее близка к одной из собственныхчастот колебаний ωj. В этом случае (2) примет более простой вид
[x1
x3
]=
[A1
A3
]sin λt (3)
2. Исполнительные механизмы. Исполнительные механизмы, обеспечивающиеактивное гашение колебаний, вызванных ветровыми нагрузками, сейсмическимивоздействиями (или их сочетаниями), можно разбить на следующие группы [2]:аэродинамические, гидравлические, гироскопические, инерционные и электроме-ханические. Наиболее приемлемыми для рассматриваемого класса задач являют-ся гидравлические, создающие максимальные управляющие моменты в одной илинескольких точках высотного сооружения.

104 Кабельков В.А., Кабельков А.Н., Нефедов В.В.
3. Уравнения движения. Изгибные колебания управляемого высотного соору-жения, моделируемого стержнем постоянного сечения, имеют вид
∂4u1
∂ε4 + β ∂∂ε
((1− ε) ∂u1
∂ε
)+ ∂2u1
∂τ2 + qnoβ0 (1 + cos2 α) ∂u1
∂τ+ qnoβ0 sin α cos α∂u3
∂τ+
+qk0β0 sin α cos α sin ω0τ∂u1
∂τ+ qk0β0
(1 + sin2 α
)sin ω0τ
∂u3
∂τ=
= qn0 cos α− qk0 sin α sin ω0τ + x1 +∑j
K1jδ′ (ε− bj) M1j + N1
∂4u3
∂ε4 + β ∂∂ε
((1− ε) ∂u3
∂ε
)+ ∂2u3
∂τ2 + qnoβ0
(1 + sin2 α
)∂u3
∂τ+ qnoβ0 sin α cos α∂u1
∂τ+
+qk0β0 sin α cos α sin ω0τ∂u3
∂τ+ qk0β0 (1 + cos2 α) sin ω0τ
∂u1
∂τ=
= qn0 sin α + qk0 cos α sin ω0τ + x3 +∑j
K3jδ′ (ε− bj) M3j + N2
(4)
Где β =ρgl2
EJ, δ (ε− bj) — дельта функция Дирака, M1j (τ) и M3j (τ) — управля-
ющие воздействия, приложенные в точках bj стержня, N1 и N2 слагаемые, содер-жащие нелинейные члены. Уравнениям (4) соответствуют граничные условия
Ui (0, τ) = 0
∂Ui(0,τ)∂ε
= 0
∂2Ui(1,τ)∂ε2 = 0
∂3Ui(0,τ)∂ε3 = 0
(5)
Уравнения (4) вариационными методами могут быть сведены к системе обыкно-венных дифференциальных уравнений первого порядка
q = A(ν, τ)q + BFF (t) + BGG (t) + N (ν,q, t) , (6)
где: q — вектор состояний; A (ν, τ) — 2π-периодическая матрица 2n× 2n, завися-щая от вектора параметров ν = [Cn, Ck, β1, α1, α]∗; N (ν,q, t) ∈ R2n — нелинейнаявектор-функция, F (t) — вектор внешних воздействий, G (t) — вектор управляю-щих воздействий.
4. Устойчивость и колебания. Выявление критических значений параметров,соответствующих поверхностям раздела областей устойчивости и неустойчивости,проводятся на основе системы линейных дифференциальных уравнений
q = A(ν, τ)q. (7)
Периодические режимы, ответвляющиеся от основных состояний, находятся ме-тодом Ляпунова-Шмидта [3].
5. Оптимальные управления. Для нахождения оптимальных управлений огра-ничивающих амплитуды периодических режимов (ответвляющихся от основныхсостояний), рассматривается вариационная задача: требуется определить системуфункций
q (t) и G (t) , доставляющих минимум функционалу
2Φ =τ2∫τ1
(q∗V1q + G∗V2G + 2L∗
(−q + A (ν, τ)q + BFF (t) + BGG (t)
))dτ
(8)
Некоторые проблемы оптимального управления колебаниями высотных ... 105
где L — вектор неопределенных множителей Лагранжа. В результате получаемдвухточечную краевую задачу
d
dτ
[qL
]=
[A −BGV−1
2 B∗G
−C∗V1C −A∗
] [qL
]+
[BFF0
]
G = −V−12 B∗
GL
где C — матрица системы наблюдения Z = Cq. Граничные условия, соответству-ющие (8), составлены в [4].
Список литературы[1] Светлицкий В.А. Механика стержней. М.: 1987. Т.2 320 с.
[2] Кабельков В.А. и др. управления колебаниями высотных сооружений // Тр. IXМеждунар. конф. «Современные проблемы механики сплошной среды», Ростов –н/Д, 11–15 октября 2005 г. Ростов – н/Д 2006. Т. 2. С. 128–131.
[3] Воронцов Г.В., Кабельков А.Н. Применение метода Ляпунова – Шмидта к исследо-ванию устойчивости и автоколебаний сложных механических систем // Прикладнаямеханика. 1983. Т. 19. С. 102–109.
[4] Воронцов Г.В., Кабельков А.Н Линейные краевые задачи об оптимальном управле-нии многомерными электромеханическими системами // Изв. Вузов. Электромеха-ника 1992. 5. С. 27–32.
Kabelkov V.A., Kabelkov A.N., Nefedov V.V. Some problems of optimum controlof fluctuations of high-altitude constructions. Some problems of optimum control areconsidered by fluctuations of high-altitude constructions: external influences on high-altitudeconstructions; the executive mechanisms providing active control by oscillatory processes;the equations of movement; stability and fluctuations; optimum control of fluctuations.

КРУТИЛЬНЫЕ КОЛЕБАНИЯ БАНДАЖА НА ПОВЕРХНОСТИЗАПОЛНЕННОГО ЖИДКОСТЬЮ ЦИЛИНДРА
Каламбет В.Б.∗, Анджикович И.Е.∗∗, Калинчук В.В.∗∗∗∗ Южный федеральный университет, Ростов-на-Дону
∗∗НИИ механики и прикладной математики им. Воровича И.И.Южного федерального университета, Ростов-на-Дону
∗∗∗ Южный научный центр РАН, Ростов-на-Дону
Рассматриваются крутильные колебания жесткого бандажа на поверхности трубо-провода, представляющего собой бесконечный полый цилиндр (трубу), заполненныйнесжимаемой, находящейся под большим статическим давлением, жидкостью. Построе-ны определяющие соотношения, проведен анализ влияния давления жидкости на дина-мические характеристики волнового процесса.
В рассмотрение вводится цилиндрическая система координат r (радиальнаякоордината), φ (азимутальный угол) и z (осевая координата). Внутренний и внеш-ний радиусы цилиндра равны соответственно R1 и R0. Материал стенки цилиндрапредставляет собой сжимаемую первоначально изотропную среду, механическиепараметры которой (плотность, упругие константы) представляют собой произ-вольные, достаточно гладкие функции радиуса r.
В общем случае краевая задача о колебаниях бесконечного кругового цилин-дра, заполненного находящейся под большим давлением идеальной жидкостью,под действием нагрузки q(R0, ϕ, z)e−iω t, распределенной в области Ω на его по-верхности, описывается системой уравнений [1–4]
∇ ·Θ = ρ∂2u
∂ t2(1)
∆φ =1
c2
∂2w
∂ t2(2)
и граничными условиями:
r = R0 : nr ·Θ =
q(R0, ϕ, z)e−iω t, −a 6 z 6 a
0, |z| > a(3)
r = R1, −∞ 6 z 6 ∞ : θrr = −∂ϕ
∂ t, θrz = 0, θrϕ = 0 (4)
∂ ur
∂ t= −∂ ϕ
∂r
u = ur, uϕ, uz — вектор перемещения в упругой среде, φ — потенциал, опреде-ляющий движение жидкости, c — скорость звука в жидкости, ω — частота ко-лебаний, ρ — плотность материала цилиндра, nr — нормаль к стенке цилиндра.θrr, θrz, θrϕ — компоненты тензора Θ, определяющего напряженное состояние встенке цилиндра.

Крутильные колебания бандажа 107
В работе [3] было показано, что давление жидкости p наводит в стенке цилин-дра начальное напряженное состояние, которое определяется формулами
σ0r = ηrp, ηr =
k2
1− k2( 1− 1
r2), σ0
ϕ = ηϕp, ηϕ =k2
1− k2( 1 +
1
r2) (5)
На рис. 1 и 2 представлены графики функций ηr, ηϕ в зависимости от коорди-наты r, рассчитанные для различных значений толщины стенок цилиндра. Кри-вые 1–7 на рисунках соответствуют толщине стенок от 0.1 (кривые 1) до 0.04 (кри-вые 7).
Рис. 1 Рис. 2
Из рисунков следует, что давление жидкости наводит в стенке цилиндра неод-нородное напряженное состояние, градиентность которого существенно зависиткак от толщины стенок, так и от радиуса цилиндра. Нетрудно заметить, что основ-ным фактором, определяющим начальное напряженное состояние в стенке цилин-дра, является ηϕ, который с одной стороны значительно превосходит ηr, с другой,как было показано в [3] не участвует в представлении радиальных перемещений.Тем самым радиальные колебания не в полной мере могут характеризовать на-чальное напряженное состояние в стенке цилиндра. В настоящей работе исследу-ется влияние давления на крутильные колебания цилиндра, что определяет необ-ходимость положить в уравнении (1) ur = 0, uz = 0, uϕ = uϕ(r, z). Необходимоучесть, что прилипание жидкости к стенке цилиндра отсутствует, колебания про-исходят только в цилиндре, роль жидкости сводится лишь к учету создаваемогоею статического давления. Тем самым задача о крутильных колебаниях сводитсяк исследованию уравнения
∂θrϕ
∂r+
θrϕ + θϕ r
r+
∂θzϕ
∂z= ρ
∂2uϕ
∂ t2(6)
с граничными условиями
r = R0 : θr ϕ =
q(R0, z)e−iω t, −a 6 z 6 a
0, |z| > a(7)

108 Каламбет В.Б., Анджикович И.Е., Калинчук В.В.
r = R1 : θrϕ = 0, −∞ 6 z 6 ∞ (8)
где компоненты тензора Θ представляются в виде [3]
θrϕ = µ+r
∂uϕ
∂r− µ−r
uϕ
r, θϕ r = µ−r
∂uϕ
∂r− µ0uϕ
r, θzϕ = µ+
z
∂uϕ
∂z, θϕ z = µ−z
∂uϕ
∂z(9)
µ+r,z = µ +
3
4σ0
r,z −1
4σ0
ϕ, µ−r,z = µ− 1
4σ0
r,z −1
4σ0
ϕ, µ0 = µ− 1
4σ0
z +3
4σ0
ϕ (10)
Применим к уравнению (6) преобразование Фурье по оси z (α — параметр пре-образования, Uϕ — трансформанта Фурье функции uϕ). Считая режим колебанийустановившимся, будем полагать, что все величины задачи могут быть представ-лены в виде f(r, z, t) = f(r, z)e−iω t. После преобразования получим
∂2Uϕ
∂r2+
1
µ+r
(µ+
r
r+ µ+′
r
)∂Uϕ
∂r− 1
µ+r
(µ0
r+ µ−′r
)Uϕ
r− µ+
z
µ+r
σ2Uϕ = 0 (11)
Для построения решения уравнения (11), представляющего собой уравнение с пе-ременными коэффициентами, преобразуем его за счет введения новой неизвестной:
Y =↑ U ′
ϕ, Uϕ
=↑ Y1, Y2 (12)
В новых обозначениях уравнение (11) представляется в виде:
Y′ = M (α, r)Y (13)
с матрицей M = ‖mi j‖2i,j=1, элементы которой представляются в виде
m11 =1
µ+r
(µ+
r
r+ µ+′
r
), m12 = − 1
µ+r r
(µ0
r+ µ−′r
)− µ+
z
µ+r
σ2 (14)
m21 = 0, m22 = 1, σ2 = α2 − ρω2
µ+z
Представим решение системы (13) в виде:
Yj =2∑
i=1
ci (α ) yi j (α, r) , j = 1, 2 (15)
где yi j (α, r) , i, j = 1, 2 — линейно независимые решения задачи Коши для уравне-ния (13) с начальными условиями yi j (α, R0) = δi j. Здесь δij — символ Кронекера.Неизвестные ci (α ) (i = 1, 2), участвующие в представлении (15), находятся приудовлетворении граничных условий.
Решение краевой задачи (6)–(8) для неоднородного предварительно напряжен-ного трубопровода после применения обратного преобразования Фурье представ-ляется в виде:
uϕ (r, z, κ) =1
2π
z2∫
z1
k (z − ξ, r, κ) qϕ (ξ) dξ , k (s, r, κ) =
∫
Γ
K (α, r, κ) eiα sdα (16)
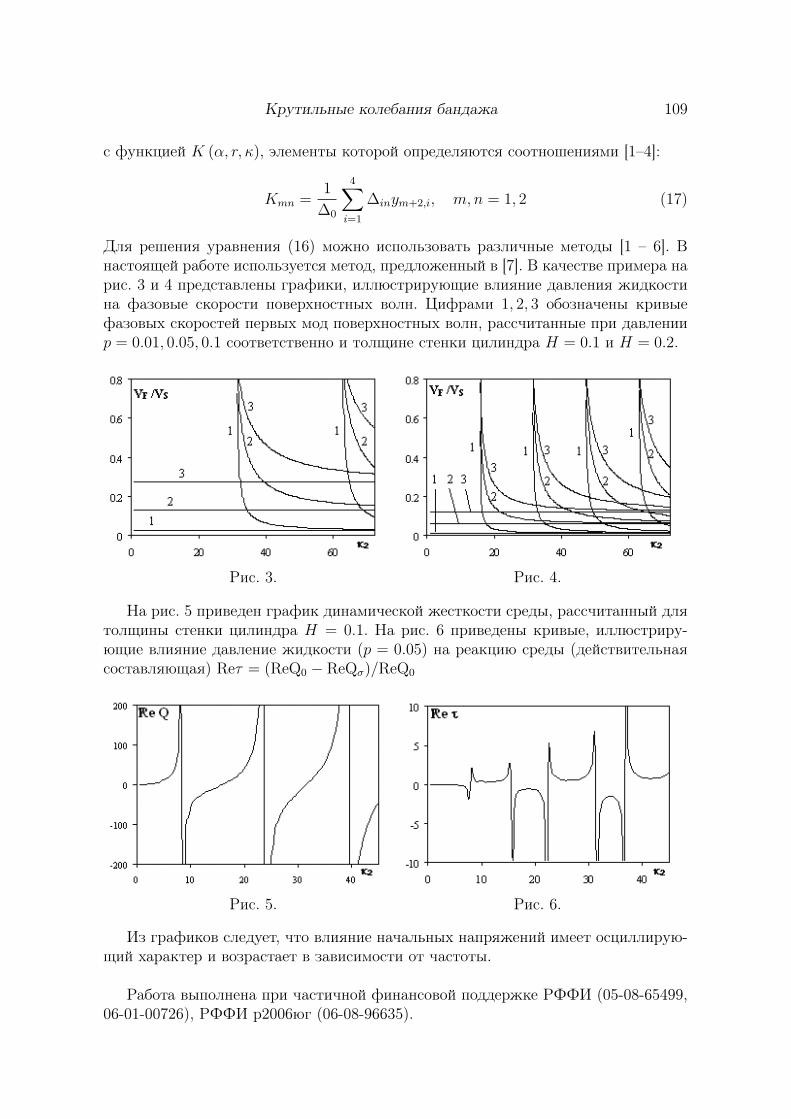
Крутильные колебания бандажа 109
с функцией K (α, r, κ), элементы которой определяются соотношениями [1–4]:
Kmn =1
∆0
4∑i=1
∆inym+2,i, m, n = 1, 2 (17)
Для решения уравнения (16) можно использовать различные методы [1 – 6]. Внастоящей работе используется метод, предложенный в [7]. В качестве примера нарис. 3 и 4 представлены графики, иллюстрирующие влияние давления жидкостина фазовые скорости поверхностных волн. Цифрами 1, 2, 3 обозначены кривыефазовых скоростей первых мод поверхностных волн, рассчитанные при давленииp = 0.01, 0.05, 0.1 соответственно и толщине стенки цилиндра H = 0.1 и H = 0.2.
Рис. 3. Рис. 4.
На рис. 5 приведен график динамической жесткости среды, рассчитанный длятолщины стенки цилиндра H = 0.1. На рис. 6 приведены кривые, иллюстриру-ющие влияние давление жидкости (p = 0.05) на реакцию среды (действительнаясоставляющая) Reτ = (ReQ0 − ReQσ)/ReQ0
Рис. 5. Рис. 6.
Из графиков следует, что влияние начальных напряжений имеет осциллирую-щий характер и возрастает в зависимости от частоты.
Работа выполнена при частичной финансовой поддержке РФФИ (05-08-65499,06-01-00726), РФФИ р2006юг (06-08-96635).
110 Каламбет В.Б., Анджикович И.Е., Калинчук В.В.
Список литературы[1] Калинчук В.В., Белянкова Т.И., Лыжов В.А. К проблеме моделирования динами-
ческих процессов в нефте-газо-трубопроводах // Экологический вестник научныхцентров ЧЭС. 2005. 4. С. 5–13.
[2] Калинчук В.В., Белянкова Т.И. Динамическая контактная задача для заполненногонесжимаемой жидкостью бесконечного цилиндра // Экологический вестник научныхцентров ЧЭС. 2006. 1. С. 33–38.
[3] Белянкова Т.И., Анджикович И.Е., Калинчук В.В. О динамической жесткости неод-нородного, заполненного идеальной жидкостью цилиндра // Экологический вестникнаучных центров ЧЭС. 2007. 1. С. 16–23.
[4] Калинчук В.В., Белянкова Т.И. Динамические контактные задачи для предваритель-но напряженных тел. М.: Физматлит, 2002. 240 с.
[5] Ворович И.И., Бабешко В.А. Динамические смешанные задачи теории упругости длянеклассических областей. М: Наука, 1979. 320 с.
[6] Ворович И.И., Бабешко В.А., Пряхина О.Д. Динамика массивных тел и резонансныеявления в деформируемых средах. М.: Научный мир, 1999. 246 с.
[7] Бабешко В.А., Белянкова Т.И., Калинчук В.В. Метод фиктивного поглощения в за-дачах теории упругости для неоднородного полупространства // ПММ. 2002. Т. 66.Вып. 2. С. 276–284.
Kalambet V.B., Andjikovich I.E., Kalinchuk V.V. Torsional oscillations of theband on the surface of a liquid-filled cylinder . Torsional oscillations of a rigid band on thepipeline surface is considered. The pipeline is modeled as an infinite hollow cylinder, filledwith the incompressible liquid under large static pressure. Constitutive relations are derived,the influence of liquid pressure on the dynamic characteristics of the wave process is analized.
ОБ УСТОЙЧИВОСТИ КОЛЬЦЕВОЙ ПЛАСТИНКИ,РАЗДЕЛЯЮЩЕЙ ЖИДКОСТЬ РАЗНОЙ ПЛОТНОСТИ
Карнаух А.Ю.Донецкий национальный университет, Украина
В настоящем сообщении обобщены результаты работ [1–3] на случай кольцевойпластинки и двухслойной жидкости. Выведено частотное уравнение, получено условиеустойчивости положения равновесия и проведено его исследование.
Постановка задачи. Рассмотрим механическую систему, состоящую из двухидеальных несмешивающихся жидкостей плотностей ρi (i = 1, 2), заполняющихполностью жесткий кольцевой цилиндрический сосуд внешнего радиуса a и внут-реннего b соответственно до глубин hi. На поверхности раздела жидкостей нахо-дится кольцевая упругая пластинка. Пластинка жестко закреплены по внешнемуи внутреннему краю, считаются изотропными, обладают изгибной жесткостью Dи невесома. Движение жидкостей и пластинки будем рассматривать в системекоординат Oxyz, расположенной так, что плоскость Oxy совпадает с поверхно-стью раздела жидкостей в невозмущенном положении, а ось Oz направлена вдольоси цилиндра противоположно вектору ускорения силы тяжести g. Задачу будемрассматривать в рамках линейной теории, считая движения жидкостей потенци-альными, а совместные колебания жидкости и пластинки безотрывными.
Уравнения движения рассматриваемой механической системы имеют вид [1–4]
∆Φi = 0;
∂Φi
∂r|r=a, b= 0,
∂Φ2
∂z|z=−h2= 0;
∂Φ1
∂z=
∂Φ2
∂z=
∂W
∂t,
D∆22W + g∆ρiW = ρ1
∂Φ1
∂t− ρ2
∂Φ2
∂tпри z = 0;
W |r=a, b= 0, ∂Wi/∂r |r=a, b= 0,
∫
S
Wds = 0.
Здесь Φi — потенциал скорости i-ой жидкости; W — прогиб пластинки; ∆2 —двумерный оператор Лапласа; ∆ρ = ρ2 − ρ1.
Ограничиваясь первой модой по угловой координате, на основании работ [1–3],уравнение собственных частот колебаний запишется следующим образом
∣∣∥∥a4i,k=1
∥∥∣∣ = 0. (1)

112 Карнаух А.Ю.
Здесь
a1k =∞∑
n=1
T ∗nαnkB
∗n1, a2k = Ck1, a3k =
∞∑n=1
T ∗nαnkB
∗n2, a4k = Ck2,
T ∗n = Tn/Tn, Tn = Tn − an, Tn = kndn/σ
2, an = ρ1 coth κ1n + ρ2 coth κ2n,
αik =1
N2n
∫
S
w0kΨnds, N2
n =
∫
S
Ψ2nds, B∗
n1 = Ψn |r=a, B∗n2 = Ψn |r=b,
Ck1 =∂w0
k
∂r|r=a, Ck2 =
∂w0k
∂r|r=b, w0
k = J1(pr), Y1(pr), I1(pr), K1(pr) cos θ,
Ψn(r, θ) = Z1(knr)/Z1(µn) cos θ, Z1(knr) = J1(knr) + γnY1(knr), γn = −J′1(µn)
Y′1 (µn)
,
dn = Dk4n + ∆ρg, p4 = g∆ρ/D, κin = knhi, kn = µn/a, ε =
b
a,
J1(x), Y1(x) — функции Бесселя соответственно первого и второго рода первогопорядка; I1(x), K1(x) — функции Бесселя от мнимого аргумента соответствен-но первого и второго рода первого порядка; µn корни уравнения J
′1(µ)Y
′1 (εµ) −
−J′1(εµ)Y
′1 (µ) = 0.
Если кольцевая пластинка вырождается в односвязную область — круг (ε = 0),то исключается из рассмотрения второе граничное условие жесткого закрепленияпластинки и частотное уравнение (1) совпадает с [4].
Устойчивость положения равновесия. Условия устойчивости совместныхколебаний упругой пластинки и двухслойной жидкости определяются действи-тельностью корней частотного уравнения (1). Данное уравнение является доволь-но сложным для аналитического исследования. Однако, с достаточной для прак-тики точностью, условия устойчивости плоского равновесного положения упругойкольцевой пластинки, по аналогии с работами [1-3], могут быть найдены из стати-ческой постановки задачи. Для этого нужно найти первый положительный кореньследующего уравнения
∣∣∣∣∣∣∣∣
J1(x) I1(x) Y1(x) K1(x)J′1x) I
′1(x) Y
′1 (x) K
′1(x)
J1(εx) I1(εx) Y1(εx) K1(εx)J′1(εx) I
′1(εx) Y
′1 (εki) K
′1(εx)
∣∣∣∣∣∣∣∣= 0. (2)
Здесь x4 = −g∆ρa4/D = −nx∆ρ/β, g = g0nx, ∆ρ = ∆ρ/ρ2 = 1 − ρ1/ρ2,β = D/(g0ρ2a
4).Обозначая через x1 первый положительный корень уравнения (2), запишем
условие устойчивости плоского равновесного положения упругой пластинки
β > −nx∆ρx−41 . (3)
Из неравенства (3) следует, что плоская форма равновесия кольцевой упругойпластинки будет устойчива, если более тяжелая жидкость будет находиться нижеменее тяжелой, т. е. при ρ1 < ρ2. При нарушении этого условия будет возможна
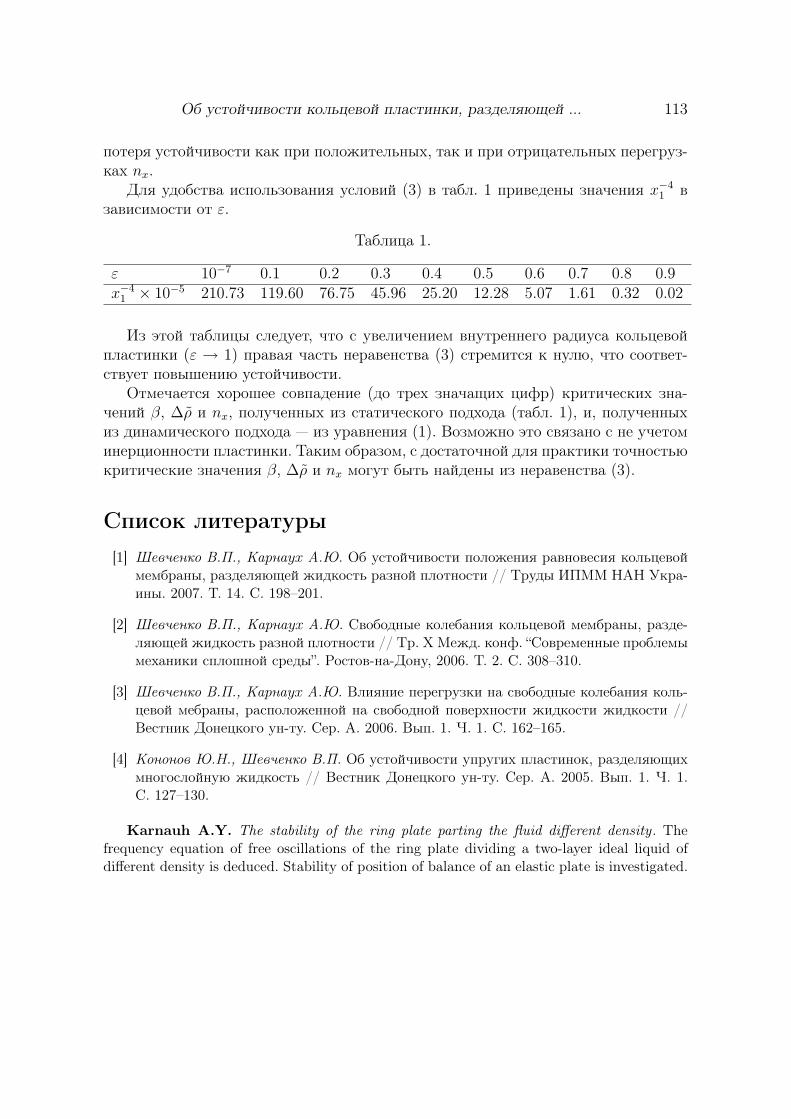
Об устойчивости кольцевой пластинки, разделяющей ... 113
потеря устойчивости как при положительных, так и при отрицательных перегруз-ках nx.
Для удобства использования условий (3) в табл. 1 приведены значения x−41 в
зависимости от ε.
Таблица 1.
ε 10−7 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9x−4
1 × 10−5 210.73 119.60 76.75 45.96 25.20 12.28 5.07 1.61 0.32 0.02
Из этой таблицы следует, что с увеличением внутреннего радиуса кольцевойпластинки (ε → 1) правая часть неравенства (3) стремится к нулю, что соответ-ствует повышению устойчивости.
Отмечается хорошее совпадение (до трех значащих цифр) критических зна-чений β, ∆ρ и nx, полученных из статического подхода (табл. 1), и, полученныхиз динамического подхода — из уравнения (1). Возможно это связано с не учетоминерционности пластинки. Таким образом, с достаточной для практики точностьюкритические значения β, ∆ρ и nx могут быть найдены из неравенства (3).
Список литературы[1] Шевченко В.П., Карнаух А.Ю. Об устойчивости положения равновесия кольцевой
мембраны, разделяющей жидкость разной плотности // Труды ИПММ НАН Укра-ины. 2007. Т. 14. С. 198–201.
[2] Шевченко В.П., Карнаух А.Ю. Свободные колебания кольцевой мембраны, разде-ляющей жидкость разной плотности // Тр. Х Межд. конф. “Современные проблемымеханики сплошной среды”. Ростов-на-Дону, 2006. Т. 2. С. 308–310.
[3] Шевченко В.П., Карнаух А.Ю. Влияние перегрузки на свободные колебания коль-цевой мебраны, расположенной на свободной поверхности жидкости жидкости //Вестник Донецкого ун-ту. Сер. А. 2006. Вып. 1. Ч. 1. С. 162–165.
[4] Кононов Ю.Н., Шевченко В.П. Об устойчивости упругих пластинок, разделяющихмногослойную жидкость // Вестник Донецкого ун-ту. Сер. А. 2005. Вып. 1. Ч. 1.С. 127–130.
Karnauh A.Y. The stability of the ring plate parting the fluid different density. Thefrequency equation of free oscillations of the ring plate dividing a two-layer ideal liquid ofdifferent density is deduced. Stability of position of balance of an elastic plate is investigated.
ВЫЧИСЛИТЕЛЬНЫЕ АСПЕКТЫ РАСЧЕТАНАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ
КОМПОЗИТНЫХ МАТЕРИАЛОВ: КОНЕЧНОЭЛЕМЕНТНЫЕ ИАНАЛИТИЧЕСКИЕ МЕТОДЫ
Кириллова Е.В.∗, Сыромятников П.В.∗∗∗ Технический университет, Висбаден, Германия
∗∗ Кубанский государственный университет, Краснодар
Широкое использование композитных материалов в различных отраслях машино-строения объясняется их новыми механическими и физическими свойствами, делающи-ми композиты предпочтительными в сравнении с традиционными материалами, несмот-ря на трудоемкость расчетов конструкций с использованием композитов и высокой сто-имостью их изготовления. В работе рассматривается техника моделирования с помощьюконечноэлементного пакета ABAQUS, который предлагает пользователю широкие воз-можности для проведения линейных и нелинейных расчетов, моделирования расслаива-ния, образование вздутий и разрушений вследствие высоких нагрузок и т.д. В качествеаналитической модели линейного многослойного анизотропного композита рассматри-вались динамические краевые задачи термоэлектроупругости, исследуемые с помощьютехники интегральных преобразований Фурье и численного интегрирования. На основеэтих двух подходов были проведены сравнительные расчеты. Обсуждаются преимуще-ства и недостатки использованных подходов, а также границы их применимости.
В последнее время композитные материалы все чаще находят свое применениев автомобильной промышленности, самолетостроении и других областях маши-ностроения. Широкое использование волокнистых композитов связано с высокойпрочностью изготовляемых из композитов конструкций и их легкостью. Такиеконструкции на 50 % легче аналогичных, изготовленных из стали, и на 25 % изго-товленных из алюминия. К недостаткам можно отнести высокую стоимость изго-товления. Моделирование конструкции из волокнистых композитов также связа-но с большими объемами вычислений. Настоящая работа посвящена особенностяммоделирования композитов посредством конечноэлементных пакетов и с помощьюразработанных полуаналитических методов. В качестве аналитической составля-ющей работы рассматривается в соответствующей постановке динамическая кра-евая задача для термоэлектроупругих анизотропных слоев с плоскопараллельны-ми границами раздела, содержащими трещины или жесткие включения. Каждыйслой описывается своими материальными константами. Гармонические колебаниявозбуждаются механическими, тепловыми, электрическими нагрузками. Описы-ваемый метод предполагает использование символа Фурье матрицы Грина K [1],зная которую, можно ставить и решать смешанные задачи для краевых задачв различных постановках. В процессе решения этих задач неизбежно возникаетнеобходимость вычисления типичных двумерных интегралов Фурье. Для указан-ных задач был разработан удобный метод приближенного вычисления обратногодвукратного преобразования Фурье u = F−1[U ] при заданном векторе нагрузок f

Вычислительные аспекты расчета композитных материалов 115
на берегах трещины или границах включения. Именно, в цилиндрических коор-динатах вектор u можно представить следующим образом:
u =1
4π2
π∫
0
∫
Γ
Kf exp(iαr sin τ)αdαdτ +1
4π2
2π∫
π
∫
Γ
Kf exp(iαr sin τ)αdαdτ
Для вычисления интегралов по Γ можно применить лемму Жордана, деформи-руя и замыкая соответствующие контуры в первом и четвертом квадрантах. Врезультате получаем
u = u+ + u− − u+I − u−I
где
u± =±i
2π
∑
k
ψ±∫
σ±
b(k)(γ, z) exp(iξ(k)(γ)r sin τ) dτ, σ+ = 0, σ− = π, ψ+ = π, ψ− = 2π,
u±I =∓1
4π2
ψ±∫
σ±
∫
Γ±I
K(α, γ, z)f(α, γ)α exp(−αr sin τ)dαdτ,
b(n)j (γ, z) = resKjm(α, γ, z)fm(α, γ)α|α=ξ(n)(γ), (j, m = 1, 2, .., 5).
В модельных расчетах оценивался вклад u± в u для пакета из несколькихразличных термоэлектроупругих слоев с плоскими трещинами и включениями.Вклад векторов u±I в u обычно незначителен. Данный метод расчета напряженно-деформированного состояния композитных материалов сравнивается с конечно-элементными подходами и, в частности, подробно рассматривается техника моде-лирование с помощью пакета прикладных программ ABAQUS. Этот пакет пред-лагает пользователю широкие возможности для проведения как линейных, так инелинейных расчетов, моделирования таких явлений как расслаивание, образова-ние вздутий на поверхности композитов, разрушения вследствие высоких нагру-зок. Волокнистые композиты представляют собой структуры, состоящие из ани-зотропных слоев, механические свойства которых зависят от ориентации волокони их механических свойств, а также вещества, в которое эти волокна помещаются.Моделирование с помощью конечноэлементных пакетов сопровождалось высоки-ми вычислительными затратами, так как описание слоистых структур связано сбольшим количеством элементов на границе слоев. Для описания возникающихздесь контактных напряжений, детального рассмотрения возникновения трещини расслаивания моделирование необходимо проводить с помощью трехмерных эле-ментов. Это приводит к высоким ресурсным затратам. При разработке последнейверсии ABAQUS основные усилия разработчиков были направлены на устранениеописанных недостатков. Были разработаны новые элементы, с помощью которыхможно описывать волокна, их ориентацию, прочность и т.д. Данные элементыиспользуются совместно с обычными элементами (оболочечными или трехмер-ными), которые описывают форму конструкции. Таким образом довольно точноописывается внутренняя структура волокнистых композитов. Последняя версия
116 Кириллова Е.В., Сыромятников П.В.
поддерживает новый интерфейс, позволяющий в автоматическом режиме зада-вать свойства слоев, из которых состоит композит, что также ведет к сокращениювременных расходов. Был разработан новый концепт для так называемых трех-мерных оболочечных элементов, использование которых связано с более низкимивычислительными затратами, позволяет все же описывать контактные напряже-ния, возникающие на границе слоев. На основе сравнительных расчетов обсужда-ются преимущества и недостатки описанных здесь подходов, а также границы ихприменимости.
Работа выполнена при поддержке грантов РФФИ, программа Юг России, про-екты (06-01-96802), (06-01-96803), (06-01-96804), (06-01- 96805), (06-05-96806), (05-01-00902), проект НШ-4839.2006.1, программ отделения ЭММПУ и ПрезидиумаРАН, выполняемых Южным научным центром РАН.
Список литературы[1] Бабешко В.А., Ратнер С.В., Сыромятников П.В. О смешанных задачах для тер-
моэлектроупругих сред с разрывными граничными условиями // ДАН 2007. Т. 412. 6. С. 1–6.
Kirillova E.V., Syromyatnikov P.V. Some computational aspects in calculating stress-strain state of composit materials: finite-element and analitical methods. The research ofprocesses in elastic anisotropic laminates is of basic importance for evaluating dynamicbehavior of components produced from contemporary composite materials as well as forcontrolling their integrity. The prime goal of the investigation is the development and computerimplementation of effective analytically based models for studying these processes. The maintool of modeling is the integral equation technique and FEM methods.

ЗАВИСИМОСТЬ ЭНЕРГОЕМКОСТИ РАЗРУШЕНИЯМАТЕРИАЛОВ ОТ ПАРАМЕТРОВ ИНСТРУМЕНТАЛЬНОГО
РЕЗАНИЯ.
Костандов Ю.А., Медведев В.С.Таврический национальный университет им. В.И. Вернадского, Симферополь,
АР Крым, Украина
Проведено экспериментальное исследование влияния взаимного расположения резцов,скорости и глубины резания на энергоемкость разрушения материалов. Установлено на-личие экстремумов на полученных зависимостях, что позволяет установить параметрырежимов резания, обеспечивающие их минимальную удельную энергоемкость. Методи-ка исследования процесса разрушения материалов при резании основана на цифровойрегистрации усилий резания, определяемых поляризационно-оптическим методом.
При разработке и добыче полезных ископаемых требуется использование тех-нологий, которые являются эффективными и оптимальными с той или иной точ-ки зрения. Одной из возникающих при этом насущных задач является созданиеэнергосберегающих способов и приемов инструментального разрушения породногомассива, что требует проведения исследований энергоемкости разрушения горныхпород. В связи с этим данная работа посвящена разработке методики и экспери-ментальному исследованию энергоемкости разрушения материалов в зависимостиот технологических параметров инструментального резания.
Будем считать, что при резании материала его разрушение происходит за счетработы, совершаемой резцом, движущимся с заданной скоростью. Тогда энерго-емкость A разрушения материала при выполнении в нем реза длиной l = l2− l1 завремя t = t2 − t1 с постоянной скоростью V определяется следующим образом:
A =
l2∫
l1
F (l)dl = V
t2∫
t1
F (t)dt,
где F (t) — изменяющееся во времени усилие резания.Таким образом, суть методики экспериментального исследования энергоемко-
сти разрушения материалов состоит в определении усилия резания F (t) при со-здании в образце серии резов длиной l с заданными шириной a и глубиной h.
Методика [1] реализована с помощью фрезерного станка за счет подачи образцана резец (или группу резцов), закрепленный на шпинделе станка и вращающийсявокруг горизонтальной оси шпинделя с заданной постоянной угловой скоростью wв плоскости, параллельной направлению подачи. Глубина резания h задается ско-ростью v вертикальной подачи стола станка. В качестве датчика усилия резанияиспользуется пластина из оптически чувствительного материала ЭД20-МТГФА.Определение силы резания проводится с помощью поляризационно-оптическогометода с применением кругового полярископа [2]. Регистрация изменяющегося
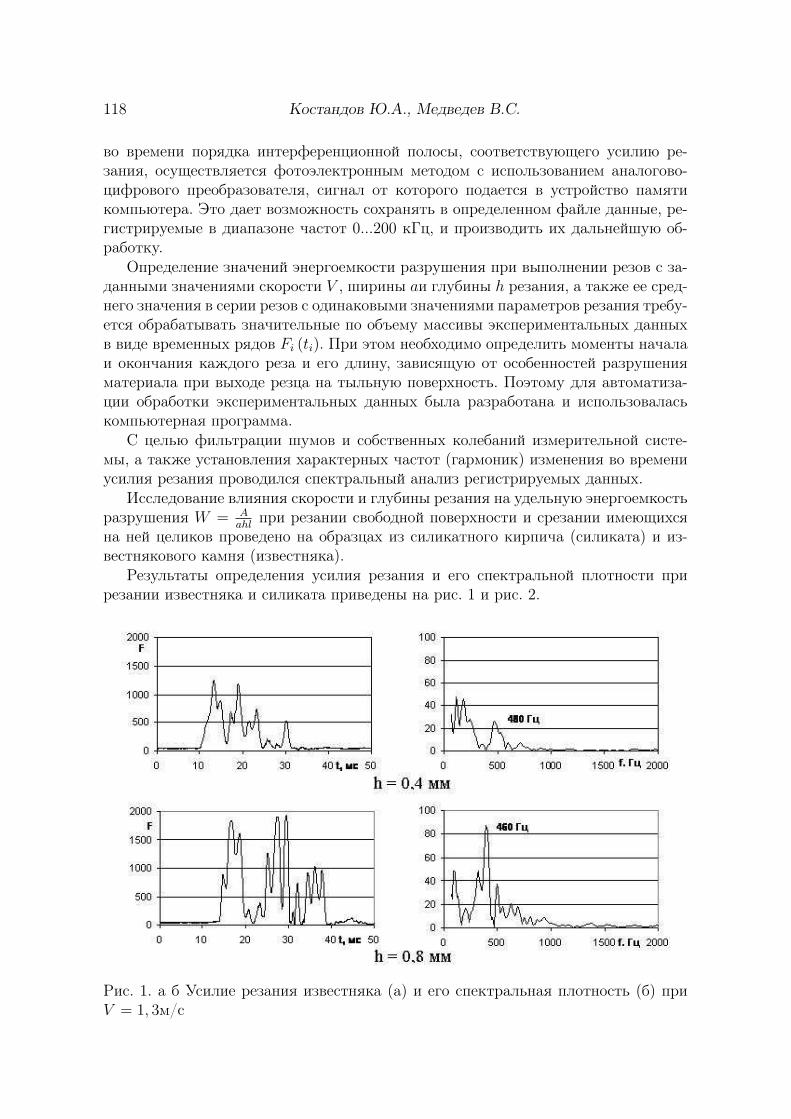
118 Костандов Ю.А., Медведев В.С.
во времени порядка интерференционной полосы, соответствующего усилию ре-зания, осуществляется фотоэлектронным методом с использованием аналогово-цифрового преобразователя, сигнал от которого подается в устройство памятикомпьютера. Это дает возможность сохранять в определенном файле данные, ре-гистрируемые в диапазоне частот 0...200 кГц, и производить их дальнейшую об-работку.
Определение значений энергоемкости разрушения при выполнении резов с за-данными значениями скорости V , ширины aи глубины h резания, а также ее сред-него значения в серии резов с одинаковыми значениями параметров резания требу-ется обрабатывать значительные по объему массивы экспериментальных данныхв виде временных рядов Fi (ti). При этом необходимо определить моменты началаи окончания каждого реза и его длину, зависящую от особенностей разрушенияматериала при выходе резца на тыльную поверхность. Поэтому для автоматиза-ции обработки экспериментальных данных была разработана и использоваласькомпьютерная программа.
С целью фильтрации шумов и собственных колебаний измерительной систе-мы, а также установления характерных частот (гармоник) изменения во времениусилия резания проводился спектральный анализ регистрируемых данных.
Исследование влияния скорости и глубины резания на удельную энергоемкостьразрушения W = A
ahlпри резании свободной поверхности и срезании имеющихся
на ней целиков проведено на образцах из силикатного кирпича (силиката) и из-вестнякового камня (известняка).
Результаты определения усилия резания и его спектральной плотности прирезании известняка и силиката приведены на рис. 1 и рис. 2.
Рис. 1. а б Усилие резания известняка (а) и его спектральная плотность (б) приV = 1, 3м/с
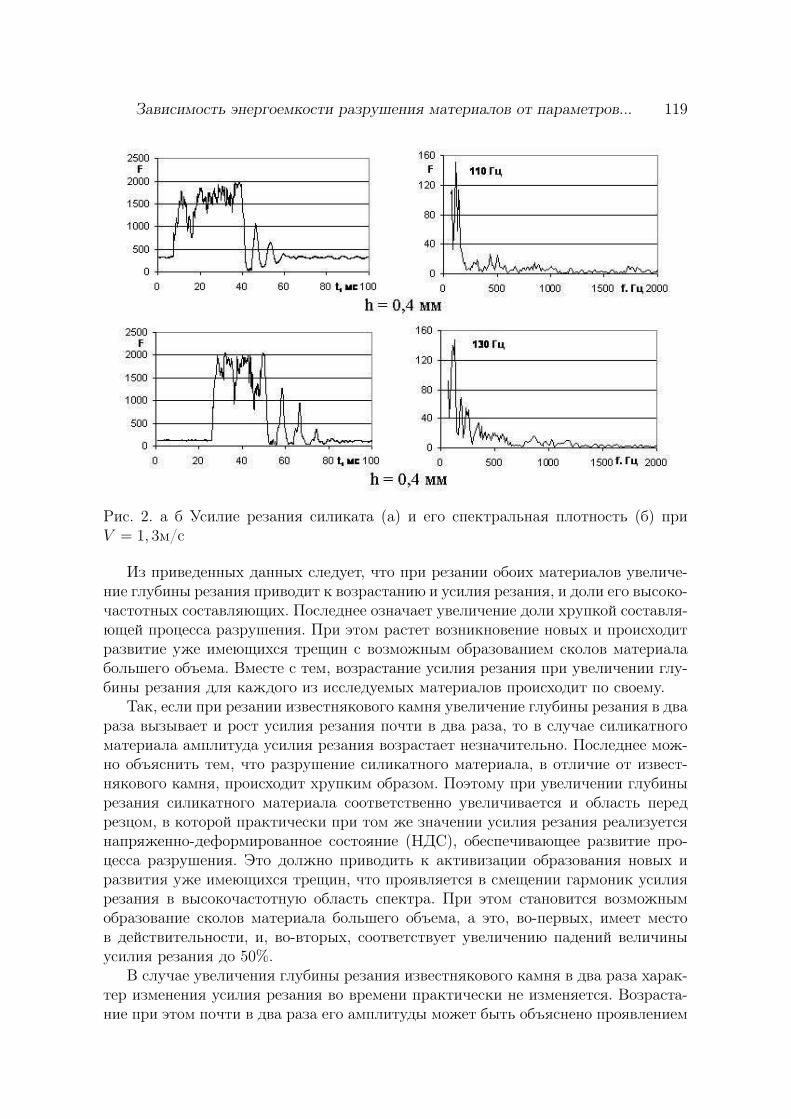
Зависимость энергоемкости разрушения материалов от параметров... 119
Рис. 2. а б Усилие резания силиката (а) и его спектральная плотность (б) приV = 1, 3м/с
Из приведенных данных следует, что при резании обоих материалов увеличе-ние глубины резания приводит к возрастанию и усилия резания, и доли его высоко-частотных составляющих. Последнее означает увеличение доли хрупкой составля-ющей процесса разрушения. При этом растет возникновение новых и происходитразвитие уже имеющихся трещин с возможным образованием сколов материалабольшего объема. Вместе с тем, возрастание усилия резания при увеличении глу-бины резания для каждого из исследуемых материалов происходит по своему.
Так, если при резании известнякового камня увеличение глубины резания в двараза вызывает и рост усилия резания почти в два раза, то в случае силикатногоматериала амплитуда усилия резания возрастает незначительно. Последнее мож-но объяснить тем, что разрушение силикатного материала, в отличие от извест-някового камня, происходит хрупким образом. Поэтому при увеличении глубинырезания силикатного материала соответственно увеличивается и область передрезцом, в которой практически при том же значении усилия резания реализуетсянапряженно-деформированное состояние (НДС), обеспечивающее развитие про-цесса разрушения. Это должно приводить к активизации образования новых иразвития уже имеющихся трещин, что проявляется в смещении гармоник усилиярезания в высокочастотную область спектра. При этом становится возможнымобразование сколов материала большего объема, а это, во-первых, имеет местов действительности, и, во-вторых, соответствует увеличению падений величиныусилия резания до 50%.
В случае увеличения глубины резания известнякового камня в два раза харак-тер изменения усилия резания во времени практически не изменяется. Возраста-ние при этом почти в два раза его амплитуды может быть объяснено проявлением
120 Костандов Ю.А., Медведев В.С.
пластических деформаций при разрушении этого материала. Это означает, что сувеличением глубины резания для достижения какими-либо компонентами НДСили их комбинациями уровня, обеспечивающего исчерпание возможностей пла-стического деформирования и развитие процесса разрушения, в увеличившемсяобъеме материала требуется соответствующее увеличение усилия резания. Выпол-нение этого приводит, как и в случае силикатного материала, к увеличению коли-чества вновь образующихся и развитию уже имеющихся трещин. Однако в этомслучае акты образования сколов материала большего объема вызывают падениявеличины усилия резания практически на 100%, что объясняется относительнонизким значением прочности известнякового камня.
Установлено, что удельная энергоемкость разрушения W и известняка, и си-ликатного материала при резании свободной поверхности снижается при умень-шении скорости резания V . Однако увеличение глубины реза h при резании си-ликатного материала приводит к снижению величины W, хотя, как было указановыше, при этом происходит незначительное увеличение усилия резания. Причинаэтого — в увеличении с глубиной реза h области перед резцом, в которой за счетхрупкого характера разрушения силикатного материала практически при том жезначении усилия резания реализуется НДС, обеспечивающее образование новых иразвитие уже имеющихся трещин. Их взаимодействие и слияние вызывает и мно-жественное разрушение в объеме материала, и образование отдельных его сколов.
При резании с определенными значениями скорости свободной поверхностиизвестняка на зависимостях W (h) прослеживается наличие максимумов. По-видимому, снижение удельной энергоемкости разрушения при увеличении глуби-ны резания после предыдущего ее возрастания происходит, как указывалось выше,вследствие исчерпания при этом возможности пластического деформирования из-вестняка. В результате в нем начинают развиваться процессы, характерное дляхрупкого разрушения.
Таким образом, на фоне общей тенденции снижения удельной энергоемкостиразрушения с уменьшением скорости резания выявлены существенные различияв зависимости процессов разрушения различных материалов от параметров реза-ния. Наличие и расположение экстремумов на этой зависимости зависит как отсхемы и параметров резания, так и физико-механических свойств материалов.
Исследование влияния взаимного расположения резцов на энергоемкость раз-рушения выполнено при резании силикатного кирпича группой резцов. При этомрезцы закреплялись на шпинделе станка с помощью устройства, которое обеспе-чивало возможность регулирования величины опережения s передними резцамизаднего резца. Использование группы резцов обеспечивало одновременное резаниедвумя передними резцами свободной поверхности и последующее срезание обра-зовавшегося целика третьим, задним резцом.
Результаты определения удельной энергоемкости разрушения образцов из си-ликатного кирпича при резании свободной поверхности и срезании целиков однимрезцом (W ) и группой резцов (WG) в зависимости от глубины резания h и ширинырезца a при значениях скорости резания V = 2,7 м/с и V = 1,7 м/с представленына рис. 3.
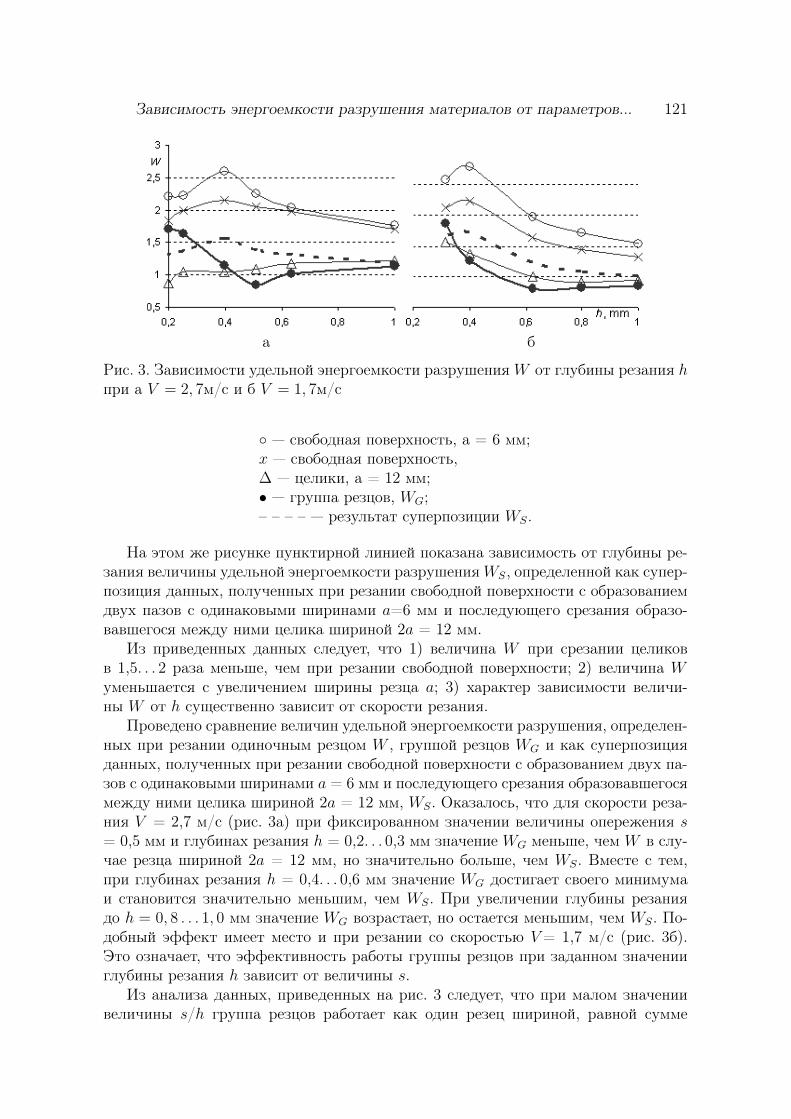
Зависимость энергоемкости разрушения материалов от параметров... 121
a б
Рис. 3. Зависимости удельной энергоемкости разрушения W от глубины резания hпри а V = 2, 7м/с и б V = 1, 7м/с
— свободная поверхность, a = 6 мм;x — свободная поверхность,∆ — целики, a = 12 мм;• — группа резцов, WG;– – – – — результат суперпозиции WS.
На этом же рисунке пунктирной линией показана зависимость от глубины ре-зания величины удельной энергоемкости разрушения WS, определенной как супер-позиция данных, полученных при резании свободной поверхности с образованиемдвух пазов с одинаковыми ширинами a=6 мм и последующего срезания образо-вавшегося между ними целика шириной 2a = 12 мм.
Из приведенных данных следует, что 1) величина W при срезании целиковв 1,5. . . 2 раза меньше, чем при резании свободной поверхности; 2) величина Wуменьшается с увеличением ширины резца a; 3) характер зависимости величи-ны W от h существенно зависит от скорости резания.
Проведено сравнение величин удельной энергоемкости разрушения, определен-ных при резании одиночным резцом W , группой резцов WG и как суперпозицияданных, полученных при резании свободной поверхности с образованием двух па-зов с одинаковыми ширинами a = 6 мм и последующего срезания образовавшегосямежду ними целика шириной 2a = 12 мм, WS. Оказалось, что для скорости реза-ния V = 2,7 м/с (рис. 3а) при фиксированном значении величины опережения s= 0,5 мм и глубинах резания h = 0,2. . . 0,3 мм значение WG меньше, чем W в слу-чае резца шириной 2a = 12 мм, но значительно больше, чем WS. Вместе с тем,при глубинах резания h = 0,4. . . 0,6 мм значение WG достигает своего минимумаи становится значительно меньшим, чем WS. При увеличении глубины резаниядо h = 0, 8 . . . 1, 0 мм значение WG возрастает, но остается меньшим, чем WS. По-добный эффект имеет место и при резании со скоростью V = 1,7 м/с (рис. 3б).Это означает, что эффективность работы группы резцов при заданном значенииглубины резания h зависит от величины s.
Из анализа данных, приведенных на рис. 3 следует, что при малом значениивеличины s/h группа резцов работает как один резец шириной, равной сумме
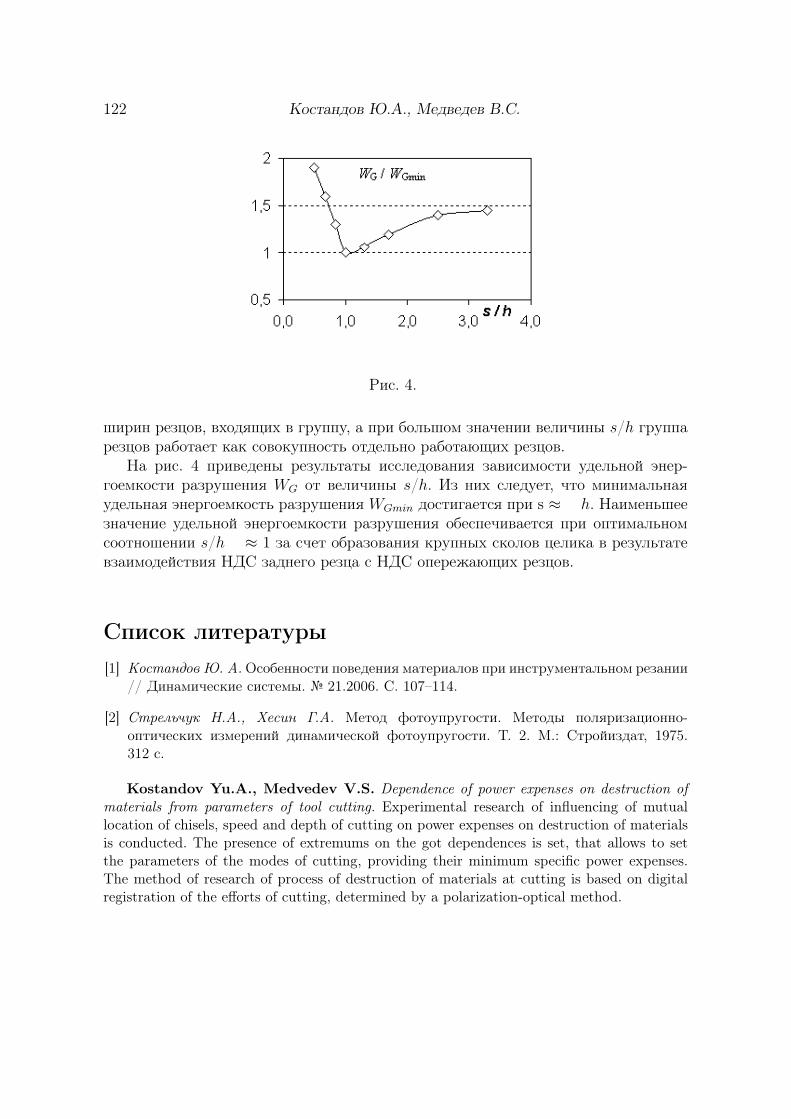
122 Костандов Ю.А., Медведев В.С.
Рис. 4.
ширин резцов, входящих в группу, а при большом значении величины s/h группарезцов работает как совокупность отдельно работающих резцов.
На рис. 4 приведены результаты исследования зависимости удельной энер-гоемкости разрушения WG от величины s/h. Из них следует, что минимальнаяудельная энергоемкость разрушения WGmin достигается при s ≈ h. Наименьшеезначение удельной энергоемкости разрушения обеспечивается при оптимальномсоотношении s/h ≈ 1 за счет образования крупных сколов целика в результатевзаимодействия НДС заднего резца с НДС опережающих резцов.
Список литературы[1] Костандов Ю. А.Особенности поведения материалов при инструментальном резании
// Динамические системы. 21.2006. С. 107–114.
[2] Стрельчук Н.А., Хесин Г.А. Метод фотоупругости. Методы поляризационно-оптических измерений динамической фотоупругости. Т. 2. М.: Стройиздат, 1975.312 с.
Kostandov Yu.A., Medvedev V.S. Dependence of power expenses on destruction ofmaterials from parameters of tool cutting. Experimental research of influencing of mutuallocation of chisels, speed and depth of cutting on power expenses on destruction of materialsis conducted. The presence of extremums on the got dependences is set, that allows to setthe parameters of the modes of cutting, providing their minimum specific power expenses.The method of research of process of destruction of materials at cutting is based on digitalregistration of the efforts of cutting, determined by a polarization-optical method.

КОНЦЕНТРАЦИЯ НАПРЯЖЕНИЙ В ЭЛЕМЕНТАХКОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА
Майстренко А.В.Ростовский Государственный строительный университет
Рассматривается силовой режим нагружения элемента конструкции летательного аппа-рата со сложной формой поперечного сечения при ресурсных испытаниях для условияупругого поведения материала. Методом конечно-элементного моделирования определе-ны напряженно-деформированные состояния образца при различных режимах испыта-ний. Обнаружены места концентрации напряжений, являющиеся причинами появлениятрещин и разрушения образцов.
Для подтверждения пригодности элементов конструкции к эксплуатации от-дельные их образцы проходят ресурсные испытания. У некоторых образцов про-исходят разрушения в нехарактерных для заданного вида испытаний областях,что требует дополнительного анализа. Эффективным путем определения при-чин подобных явлений является численное моделирование нагружения конструк-ции [2-4].
Разработана методика расчета полей напряжений и деформаций в теле лонже-рона при испытаниях с учетом упругого поведения материала в следующей поста-новке. Имеется испытательный образец заданной геометрии. Крепление образцак испытательному стенду осуществляется с помощью специальных приспособле-ний (рис. 1). Геометрия образцов, свойства материалов из которых они изготовле-
Рис. 1. Крепление образца
ны, а также силовые нагрузки для различных режимов испытаний моделируютсяконечно-элементной моделью [1]. При этом распределенная нагрузка заменяетсяэквивалентными узловыми усилиями. Потенциальная энергия системы при расче-те на заданные силы имеет вид
U =n∑
i=1
PiZi −m∑
j=1
∫
v
WjdVj (1)
124 Майстренко А.В.
где n — число независимых компонентов перемещений; m — количество элемен-тов. Первый член в (1) является линейной функцией перемещений Zi. Упругийпотенциал Wj является однородной функцией второго порядка относительно Z.Варьирование выражения (1) по Zi дает n линейных уравнений относительно Z
dU
dZi
= 0 i = 1, ..., n (2)
Матрица жесткости произвольного элемента конечных размеров определяется поформуле
r =
∫
v
a′r(dV )adV, (3)
где r(dV ), далее обозначаемая через C, есть матрица жесткости бесконечно малогоэлемента.
Деформации определяются через перемещения. Функции перемещения в пря-моугольной системе координат в матричной форме имеют вид
Z [Z(x, y, z)] [fg] , (4)
где [fg] — вектор независимых параметров, определяемых числом степеней свобо-ды элемента. Из (4) находятся деформации при помощи уравнений Коши
a = F (Z) = [B(x, y, z)] [fg] (5)
Параметры fg определяются из граничных условий. Выражения перемещений дляузловых точек:
Z = A [fg] . (6)
Матрица А строится подстановкой координат узлов в принятые функции пере-мещений (4). Окончательное выражению для матрицы жесткости произвольногоэлемента имеет вид
r =
∫
v
(A−1
)′B′CBA−1dV =
(A−1
)′
∫
v
B′CBdV
A−1 (7)
Объемы лонжерона и крепежных пластин разбиваются на тетрагональные ко-нечные элементы, узлы которых показаны на рис. 2. Их количество в расчетныхмоделях варьировалось в пределах от 150 до 550 тыс. в зависимости от точностизадания анализируемой области.
Для количественной оценки точности моделирования нагружения образ-ца значения вычисленных в определенных точках продольных напряженийсравнивались с реально измеренными при испытаниях. Разность не превыша-ла 12% (см. табл. 1), что было признано приемлемым.
Расчет напряженно-деформированного состояния лонжерона при испытанияхв плоскости тяги для различных статических нагрузок начинается с вычисленияперемещений (рис. 3). Далее определяются поля напряжений и деформаций в объ-
Концентрация напряжений в элементах конструкции 125
Рис. 2. Конечные элементы
Номеракон-троль-ныхточек
Расчетныезначенияпродольныхнапряжений вМПа
Измеренныезначенияпродольныхнапряжений вМПа
Абсолютнаяразницазначений на-пряжений вМПа
Относительнаяпогрешность рас-чета напряженийразработанной про-граммой в %
11 35,2 40,0 4,8 12,013 38,7 38,1 0,6 1,5712 40,3 38,0 2,3 6,0514 39,3 38,3 1,0 2,6121 35,2 38,2 3,0 7,8523 37,4 36,9 0,5 1,3622 41,2 38,8 2,4 6,1924 39,9 38,4 1,5 3,91
Среднее значение 2,0 5,19
Таблица 1. Сравнение расчетных и измеренных значений продольных напряженийдля случая прогиба 6 мм в контрольной точке
Рис. 3. Перемещения
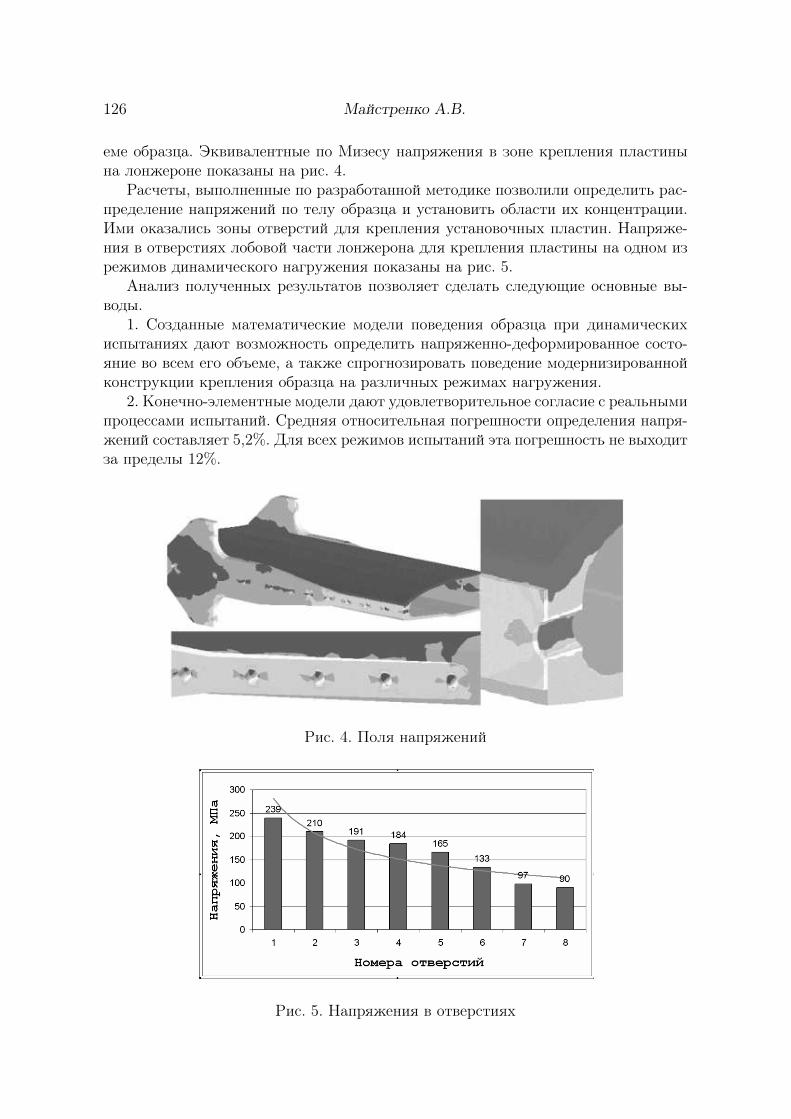
126 Майстренко А.В.
еме образца. Эквивалентные по Мизесу напряжения в зоне крепления пластинына лонжероне показаны на рис. 4.
Расчеты, выполненные по разработанной методике позволили определить рас-пределение напряжений по телу образца и установить области их концентрации.Ими оказались зоны отверстий для крепления установочных пластин. Напряже-ния в отверстиях лобовой части лонжерона для крепления пластины на одном изрежимов динамического нагружения показаны на рис. 5.
Анализ полученных результатов позволяет сделать следующие основные вы-воды.
1. Созданные математические модели поведения образца при динамическихиспытаниях дают возможность определить напряженно-деформированное состо-яние во всем его объеме, а также спрогнозировать поведение модернизированнойконструкции крепления образца на различных режимах нагружения.
2. Конечно-элементные модели дают удовлетворительное согласие с реальнымипроцессами испытаний. Средняя относительная погрешности определения напря-жений составляет 5,2%. Для всех режимов испытаний эта погрешность не выходитза пределы 12%.
Рис. 4. Поля напряжений
Рис. 5. Напряжения в отверстиях

Концентрация напряжений в элементах конструкции 127
3. Разработанная методика расчета полей напряжений и деформаций в телелонжерона при испытаниях позволила установить, что наибольшие напряжениявозникают в местах его крепления к пластине, в зоне отверстий. Они могут пре-вышать средние для этой области напряжения в 2,5 раза и быть больше макси-мальных для рабочей зоны образца на 40-60%.
4. Концентрация напряжений в районе отверстий имеет сложный объемныйхарактер. Напряжения вокруг отверстий распределены неоднородно не только поокружности, но и по образующей. Напряжения в точках выхода отверстия наповерхность лонжерона превышают аналогичные значения в середине отверстияна 10-20%.
Список литературы[1] Сабоннадьер Ж.-К., Кулон Ж.-Л. . Метод конечных элементов и САПР: Пер. с
франц. М.: Мир, 1989.-190с.
[2] Майстренко А.В. Остаточные деформации элементов конструкции летательныхаппаратов после действия сосредоточенных сил. // “Современные проблемы меха-ники сплошной среды”. Труды VII Международной конференции, Россия, Ростов-на-Дону, 2001. Т. 1. С. 157–159.
[3] Майстренко А.В. Оптимизация теплового режима склейки элемента конструкциилетательного аппарата. //“Современные проблемы механики сплошной среды”. Тру-ды VIII Международной конференции, Россия, Ростов-на-Дону, 2002. Т. 1. С. 96–99.
[4] Майстренко А.В. Математические модели пластической правки силовых эле-ментов конструкций. // “Строительство-2003”. Материалы международной научно-практической конференции, Россия, Ростов-на-Дону, 2003. С. 126–127.
Maystrenko A.V. The stress concentration in construction elements of the vehicle. Theforce condition of sticking the vehicle structure element is considered here. It should be notedthat it has a complex form of cross-section during tests for conditions of elastic behavior ofstructure. The stress-deformation state of structure under various tests is determined by meansof a finite-elements modeling. The places of stress concentration which result in cracking andmodel destruction are found.
О ПЕРСПЕКТИВАХ КОМПЛЕКСНОЙ КОРРЕКЦИИРЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ МАЛЫХ ПЕРЕМЕЩЕНИЙ
ЛАЗЕРНЫМИ ИНТЕРФЕРОМЕТРАМИ
Мирошниченко И.П.∗, Паринов И.А.∗∗,Серкин А. Г.∗, Сизов В.П.∗
∗ Ростовский военный институт ракетных войск∗∗ НИИ механики и прикладной математики им. Воровича И.И. Южного
федерального университета, Ростов-на-Дону
Разработана и экспериментально обоснована методика комплексной коррекции ре-зультатов измерений малых перемещений лазерными интерферометрами, основанная наинтегральной оценке интенсивности оптического поля интерферограммы, которая позво-ляет определять и вносить поправки в результаты измерений, обусловленные влияниемвнешних дестабилизирующих факторов.
Теоретически достижимый предел интерференционных измерений малых длини перемещений при современном уровне развития техники составляет 10−9–10−12 м. Достигнутый уровень значительно превышает упомянутый предел, чтообъясняется сложностью обеспечения нормальных условий измерения и действиемкомплекса внешних дестабилизирующих факторов [1]. Анализ основных погреш-ностей лазерных интерферометров показывает их комплексную природу, поэтомуих учет возможен только путем выявления и введения поправок в результат из-мерения. Обобщенно для достижения этой цели можно выделить два подхода:факторную и комплексную коррекции результатов измерений. Суть факторнойкоррекции заключается в контроле отдельных влияющих факторов и дальнейшемопределении по известным или экспериментально полученным зависимостям влия-ния каждого фактора с последующим вычислением поправки. При относительнойпростоте такого способа ему свойствен принципиальный недостаток, обусловлен-ный сложностью учета всех влияющих факторов, в результате чего измерительнаясистема оказывается перегруженной большим количеством дополнительных дат-чиков, погрешности которых существенно влияют на результат коррекции. Ком-плексная коррекция заключается в определении суммарного результата действиявсех влияющих факторов, вносящих погрешность в результат измерений [1], пер-спективна по сравнению с факторной, что требует проведения исследований дляопределения параметров, разработки средств и методики комплексной коррекции.
Анализ целесообразности интегральной оценки интенсивности оптического по-ля интерференционной картины, представленный в [2] показал, что этот параметрне зависит от перемещений отражателя и может быть использован для контроляизменений интенсивности, вызванных амплитудными или фазовыми искажениямв оптических элементах схемы или среде распространения излучения, а также дляконтроля внешних дестабилизирующих факторов, влияющих на режим работы ис-точника и приемника излучения. Полученные результаты полностью соответству-ют теории интерферометрии, из которой следует, что суммарная интенсивность
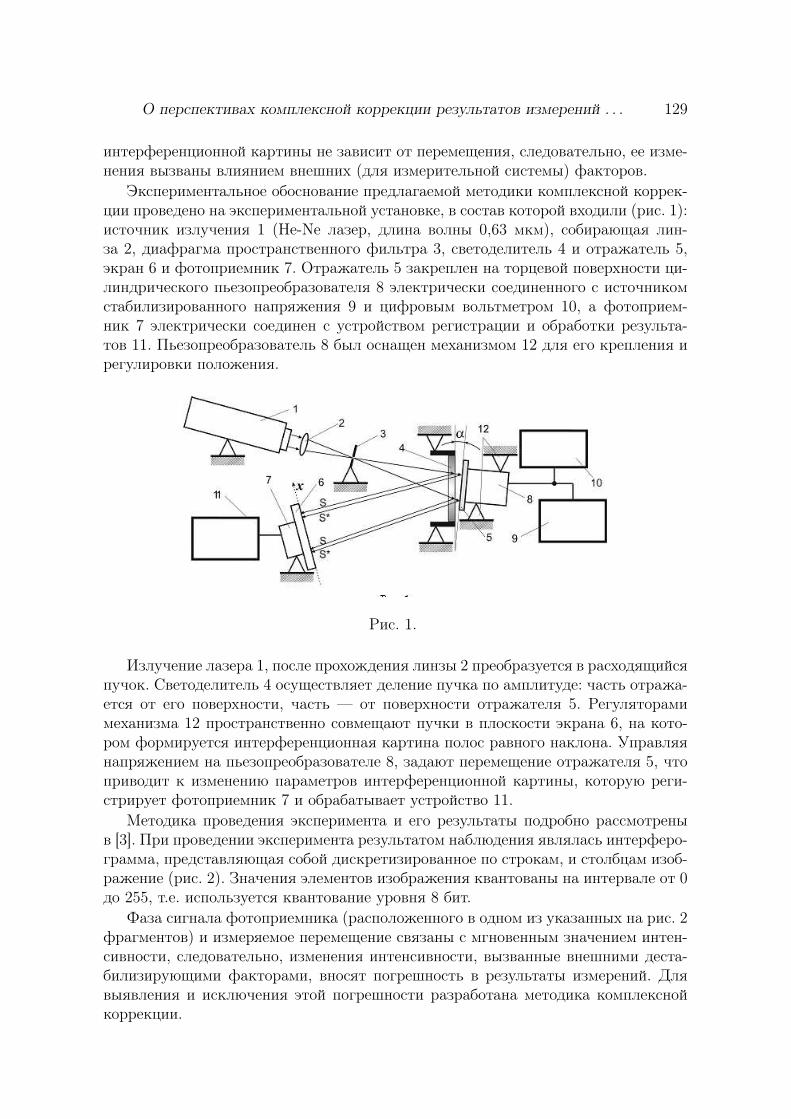
О перспективах комплексной коррекции результатов измерений . . . 129
интерференционной картины не зависит от перемещения, следовательно, ее изме-нения вызваны влиянием внешних (для измерительной системы) факторов.
Экспериментальное обоснование предлагаемой методики комплексной коррек-ции проведено на экспериментальной установке, в состав которой входили (рис. 1):источник излучения 1 (He-Ne лазер, длина волны 0,63 мкм), собирающая лин-за 2, диафрагма пространственного фильтра 3, светоделитель 4 и отражатель 5,экран 6 и фотоприемник 7. Отражатель 5 закреплен на торцевой поверхности ци-линдрического пьезопреобразователя 8 электрически соединенного с источникомстабилизированного напряжения 9 и цифровым вольтметром 10, а фотоприем-ник 7 электрически соединен с устройством регистрации и обработки результа-тов 11. Пьезопреобразователь 8 был оснащен механизмом 12 для его крепления ирегулировки положения.
Рис. 1.
Излучение лазера 1, после прохождения линзы 2 преобразуется в расходящийсяпучок. Светоделитель 4 осуществляет деление пучка по амплитуде: часть отража-ется от его поверхности, часть –– от поверхности отражателя 5. Регуляторамимеханизма 12 пространственно совмещают пучки в плоскости экрана 6, на кото-ром формируется интерференционная картина полос равного наклона. Управляянапряжением на пьезопреобразователе 8, задают перемещение отражателя 5, чтоприводит к изменению параметров интерференционной картины, которую реги-стрирует фотоприемник 7 и обрабатывает устройство 11.
Методика проведения эксперимента и его результаты подробно рассмотреныв [3]. При проведении эксперимента результатом наблюдения являлась интерферо-грамма, представляющая собой дискретизированное по строкам, и столбцам изоб-ражение (рис. 2). Значения элементов изображения квантованы на интервале от 0до 255, т.е. используется квантование уровня 8 бит.
Фаза сигнала фотоприемника (расположенного в одном из указанных на рис. 2фрагментов) и измеряемое перемещение связаны с мгновенным значением интен-сивности, следовательно, изменения интенсивности, вызванные внешними деста-билизирующими факторами, вносят погрешность в результаты измерений. Длявыявления и исключения этой погрешности разработана методика комплекснойкоррекции.

130 Мирошниченко И.П., Паринов И.А., Серкин А.Г., Сизов В.П.
Рис. 2.
Сущность предлагаемой методики заключается в контроле постоянства интен-сивности интерференционного поля, регистрируемой интегрально, т.е. суммарнойинтенсивности всех элементов изображения. Принцип коррекции, реализованныйв предлагаемой методике состоит в том, что одновременно с измерением усреднен-ной по заданному фрагменту интерферограммы (рис. 2) интенсивности, осуществ-ляют интегральную оценку интенсивности и вычисляют ее отклонение от исходно-го значения (в качестве которого можно принять величину, зарегистрированную вначале измерительного процесса при установившихся значениях нормальных усло-вий). По отклонению интегральной оценки интенсивности определяют поправку врезультат измерения интенсивности на действие внешних факторов.
Результаты экспериментального обоснования разработанной методики ком-плексной коррекции рассмотрены на частном примере. На рис. 3 изображена зави-симость интегральной интенсивности от перемещения отражателя, при регистра-ции сигнала фотоприемника на каждом шаге перемещения (пунктирной линиейуказано исходное значение интенсивности).
Рис. 3.
Используя полученные значения, было определено отклонение интегральнойинтенсивности от исходного значения и вычислена поправка в результат измере-ния интенсивности для каждого шага перемещения отражателя. На рис. 4 пунк-тирной линией обозначен результат измерения интенсивности, полученный в ходепространственного осреднения по фрагменту 2 (рис. 2), а сплошной –– результатизмерения интенсивности, с учетом поправки, определенной по разработанной ме-тодике.
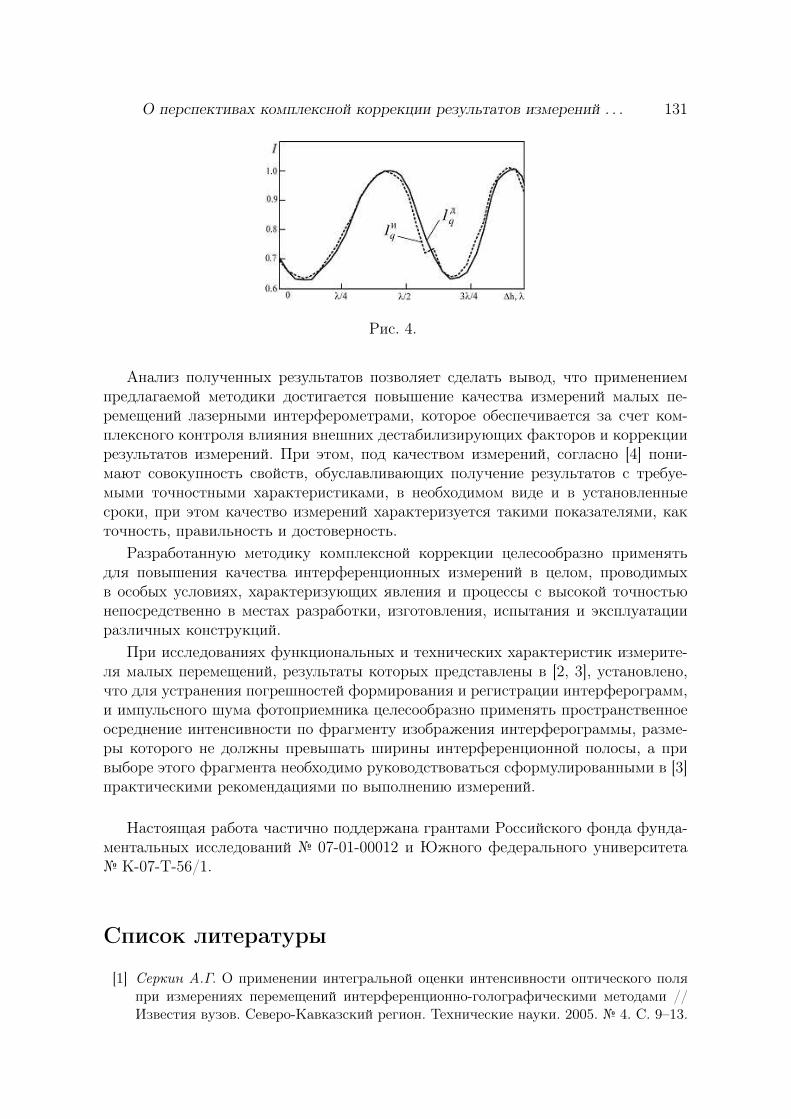
О перспективах комплексной коррекции результатов измерений . . . 131
Рис. 4.
Анализ полученных результатов позволяет сделать вывод, что применениемпредлагаемой методики достигается повышение качества измерений малых пе-ремещений лазерными интерферометрами, которое обеспечивается за счет ком-плексного контроля влияния внешних дестабилизирующих факторов и коррекциирезультатов измерений. При этом, под качеством измерений, согласно [4] пони-мают совокупность свойств, обуславливающих получение результатов с требуе-мыми точностными характеристиками, в необходимом виде и в установленныесроки, при этом качество измерений характеризуется такими показателями, какточность, правильность и достоверность.
Разработанную методику комплексной коррекции целесообразно применятьдля повышения качества интерференционных измерений в целом, проводимыхв особых условиях, характеризующих явления и процессы с высокой точностьюнепосредственно в местах разработки, изготовления, испытания и эксплуатацииразличных конструкций.
При исследованиях функциональных и технических характеристик измерите-ля малых перемещений, результаты которых представлены в [2, 3], установлено,что для устранения погрешностей формирования и регистрации интерферограмм,и импульсного шума фотоприемника целесообразно применять пространственноеосреднение интенсивности по фрагменту изображения интерферограммы, разме-ры которого не должны превышать ширины интерференционной полосы, а привыборе этого фрагмента необходимо руководствоваться сформулированными в [3]практическими рекомендациями по выполнению измерений.
Настоящая работа частично поддержана грантами Российского фонда фунда-ментальных исследований 07-01-00012 и Южного федерального университета К-07-Т-56/1.
Список литературы
[1] Серкин А.Г. О применении интегральной оценки интенсивности оптического поляпри измерениях перемещений интерференционно-голографическими методами //Известия вузов. Северо-Кавказский регион. Технические науки. 2005. 4. С. 9–13.

132 Мирошниченко И.П., Паринов И.А., Серкин А.Г., Сизов В.П.
[2] Мирошниченко И.П., Серкин А.Г. Результаты экспериментальных исследованийинтерференционного измерителя малых перемещений // Измерительная техника.2006. 5. С. 22–25.
[3] Мирошниченко И.П., Серкин А.Г. Особенности использования интерференционныхизмерителей малых перемещений при решении задач диагностики технического со-стояния конструкций // Дефектоскопия. 2007. 4. С. 31–39.
[4] Сергеев А.Г., Латышев М.В., Терегеря В.В. Метрология, стандартизация, серти-фикация: Учебное пособие. М.: Логос, 2003. 536 с.
Miroshnichenko I.P., Parinov I.A., Serkin A.G., Sizov V.P. About the perspectivesof complex correction for the measurement results of minor movements by means of laserinterferometers. We have developed and experimentally substantiated a complex correctionprocedure for the measurement results of minor movements by means of laser interferometerswhich is based on the integral estimation of the optical field intensity of the interferogram andpermits to define and correct measurement results due to the influence of external destabilizingfactors.
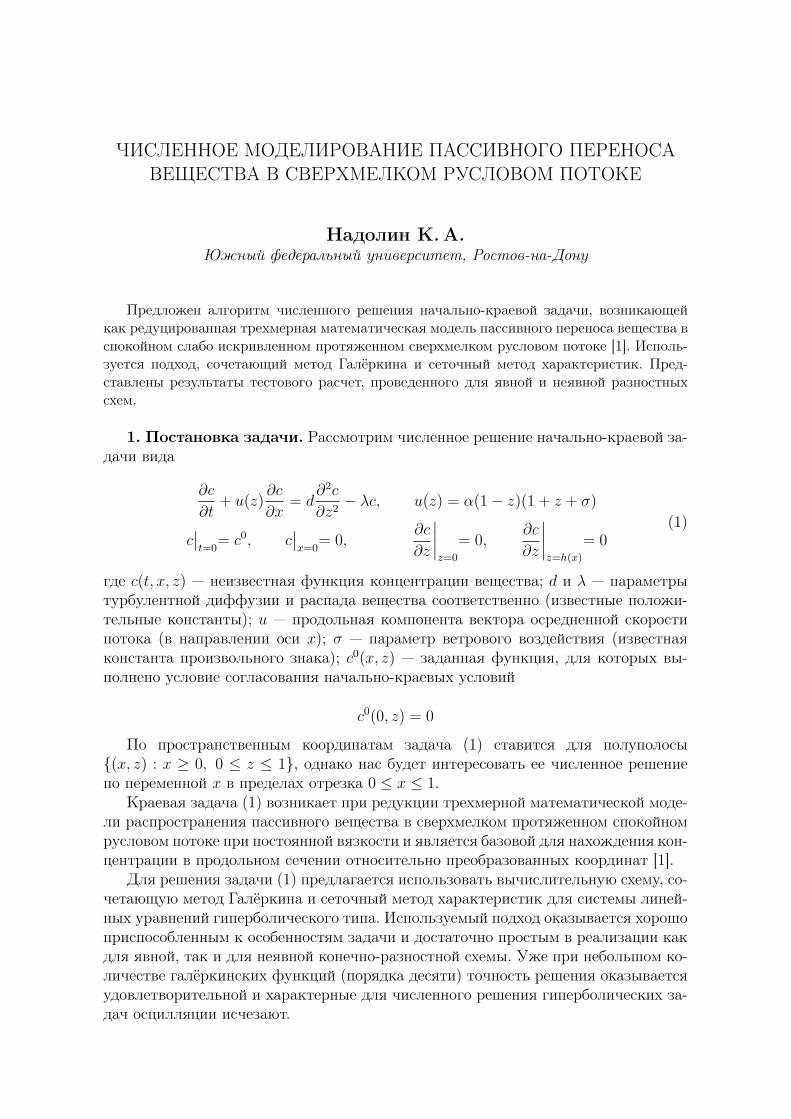
ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ ПАССИВНОГО ПЕРЕНОСАВЕЩЕСТВА В СВЕРХМЕЛКОМ РУСЛОВОМ ПОТОКЕ
Нaдолин К.А.Южный федеральный университет, Ростов-на-Дону
Предложен алгоритм численного решения начально-краевой задачи, возникающейкак редуцированная трехмерная математическая модель пассивного переноса вещества вспокойном слабо искривленном протяженном сверхмелком русловом потоке [1]. Исполь-зуется подход, сочетающий метод Галёркина и сеточный метод характеристик. Пред-ставлены результаты тестового расчет, проведенного для явной и неявной разностныхсхем.
1. Постановка задачи. Рассмотрим численное решение начально-краевой за-дачи вида
∂c
∂t+ u(z)
∂c
∂x= d
∂2c
∂z2− λc, u(z) = α(1− z)(1 + z + σ)
c∣∣t=0
= c0, c∣∣x=0
= 0,∂c
∂z
∣∣∣∣z=0
= 0,∂c
∂z
∣∣∣∣z=h(x)
= 0(1)
где c(t, x, z) — неизвестная функция концентрации вещества; d и λ — параметрытурбулентной диффузии и распада вещества соответственно (известные положи-тельные константы); u — продольная компонента вектора осредненной скоростипотока (в направлении оси x); σ — параметр ветрового воздействия (известнаяконстанта произвольного знака); c0(x, z) — заданная функция, для которых вы-полнено условие согласования начально-краевых условий
c0(0, z) = 0
По пространственным координатам задача (1) ставится для полуполосы(x, z) : x ≥ 0, 0 ≤ z ≤ 1, однако нас будет интересовать ее численное решениепо переменной x в пределах отрезка 0 ≤ x ≤ 1.
Краевая задача (1) возникает при редукции трехмерной математической моде-ли распространения пассивного вещества в сверхмелком протяженном спокойномрусловом потоке при постоянной вязкости и является базовой для нахождения кон-центрации в продольном сечении относительно преобразованных координат [1].
Для решения задачи (1) предлагается использовать вычислительную схему, со-четающую метод Галёркина и сеточный метод характеристик для системы линей-ных уравнений гиперболического типа. Используемый подход оказывается хорошоприспособленным к особенностям задачи и достаточно простым в реализации какдля явной, так и для неявной конечно-разностной схемы. Уже при небольшом ко-личестве галёркинских функций (порядка десяти) точность решения оказываетсяудовлетворительной и характерные для численного решения гиперболических за-дач осцилляции исчезают.

134 Нaдолин К.А.
2. Метод Галёркина. Инварианты Римана. Для численного решенияначально-краевой задачи (1) используем метод Галёркина по переменной z. Бу-дем разыскивать приближенное решение (1) в виде
c(t, x, z) =K∑
n=0
sn(t, x)ϕn(z) (2)
где система галеркинских функций ϕn(z)Kn=0 удовлетворяет краевым услови-
ям (1) при z = 0 и z = 1 и является ортонормированной в L2[0, 1].Подставляя ряд (2) в уравнения (1) и умножая скалярно на ϕm(z), m =
0, 1, . . . , K, получим линейную систему дифференциальных уравнений
∂s
∂t+ A
∂s
∂x= Bs (3)
s∣∣t=0
= C0, s∣∣x=0
= 0 (4)
где элементы матриц A и B и вектора C0 вычисляются по формулам
amn = anm =
1∫
0
u(z)ϕn(z)ϕm(z) dz, bmn = bnm = −λδnm − d
1∫
0
ϕ′n(z)ϕ
′m(z) dz
C0m =
1∫
0
c0(x, z)ϕm(z)dz, m, n = 0, 1, . . . , K
(5)
В силу симметрии матрицы A, все ее собственные значения µk вещественные, алевые собственные векторы lk являются также правыми собственными векторамии образуют базис. Т. о. система (3) будет гиперболической и для нее можно ввестиинварианты Римана [2].
В дальнейшем будем считать, что собственные значения матрицы A µk, k == 0, 1, . . . , K являются простыми и упорядоченными по возрастанию (заметим,что простота собственных значений матрицы легко проверяется численно [3]).
Система (3), (4), записанная относительно инвариантов Римана примет вид
∂r
∂t+ M
∂r
∂x= Gr (6)
r|t=0 = ρ0, r|x=0 = 0 (7)
Здесь rk = (lk, s), k = 0, 1, . . . , K — инварианты Римана; матрица G = LBL−1
имеет постоянные элементы; матрица L составлена из столбцов lk; матрица Mявляется диагональной с постоянными элементами µk, начальное условие опреде-ляется вектором ρ0 = LC0.
3. Сеточный метод характеристик. Запишем систему (6) в покоординат-ном виде
∂rk
∂t+ µk
∂rk
∂x=
K∑i=0
gkiri, k = 0, 1, . . . , K (8)

Численное моделирование переноса вещества в русловом потоке . . . 135
Уравнения характеристических линий для системы (8) имеют вид
dx
dt= µk (9)
В каждой точке координатной плоскости (x, t) собственное значение µk задаетхарактеристическое направление x = xA + µk(t − t∗), вдоль которого изменяетсяинвариант Римана rk (рис. 1a). Особый интерес представляют минимальное µ0 и
(a) (b)Рис. 1. Расчетная область: (a) — характеристики, определяющие зону влиянияначальных условий на решение в точке A; (b) — сетка, образованная характери-стиками
максимальное µK собственные значения, т.к. им отвечают характеристики, опре-деляющие область влияния начальных и граничных условий на решение в точке(на рис. 1a это отрезок оси абсцисс [x0
0, x0M ]). С другой стороны, отрезок [x0
0, x0M ]
будет входить в область влияния начальных условий на решение в любой точке,лежащей на отрезке [A,B] (см. рис. 1a).
Для численного интегрирования системы (8) при начальных условиях, отлич-ных от нуля лишь на отрезке [x0
0, x0M ], используем сеточный метод характеристик.
Следуя общей схеме метода, введем на [x00, x
0M ] равномерную сетку
ωh = x0m = x0
0 + mh, m = 0, 1, ..., M ; h = (x0M − x0
0)/M
и через каждый узел x0m проведем пару характеристик, соответствующих µ0 и µK ,
как показано на рис. 1b.Поскольку характеристики являются прямыми линиями, то точки их пересе-
чения будут лежать на равноотстоящих временных слоях и в каждом таком слоерасстояние между соседними точками пересечения будет равно h (см. рис. 1b).
На плоскости переменных (x, t) введем сетку
ωτh = (xn
m, tn); xnm = xn
0 + mh; tn = nτ ; n = 0, 1, ...; m = 0, 1, ...,M + n,xn+1
m = xnm +
µ0h
µK − µ0
, x0m ∈ ωh, τ =
h
µK − µ0

136 Нaдолин К.А.
Заметим, что для абсцисс узлов сетки выполняются соотношения
xn+1m − xn
m = µ0τ, xn+1m+1 − xn
m = µKτ
Вдоль характеристик (9) система (8) может быть записана в виде
(drk
dt
)
k
=K∑
i=0
gkiri, k = 0, 1, . . . , K (10)
Заменяя в (10) производную конечно-разностным аналогом, получим явнуюили неявную конечно-разностные схемы
rk(xn+1m+1, t
n+1)− rk(ξnk , tn)
∆k
=K∑
i=0
gkiri(ξnk , tn), k = 0, 1, . . . , K (11)
rk(xn+1m+1, t
n+1)− rk(ξnk , tn)
∆k
=K∑
i=0
gkiri(xn+1m+1, t
n+1), k = 0, 1, . . . , K (12)
гдеξnk = (1− θk)x
nm+1 + θkx
nm, k = 0, 1, . . . , K
θk =µk − µ0
µK − µ0
, 0 ≤ θk ≤ 1, ∆k = τ√
1 + µ2k =
h√
1 + µ2k
µK − µ0
(13)
Смысл величин, входящих в формулы (11)-(13), поясняет рис. 2.
Рис. 2. Сеточный шаблон для конечно-разностной аппроксимации
Поскольку на n-м временном слое значения инвариантов Римана известнылишь в узлах сетки (xn
m, tn), для вычисления их значений в промежуточных точках(ξn
k , tn) применим линейную интерполяцию
rk(ξnk , tn) = (1− θk)r
nk,m+1 + θkr
nk,m
где обозначено rnk,m = rk(x
nm, tn).
Тогда явная схема (11) примет вид
rn+1k,m+1 = (1− θk)r
nk,m+1 + θkr
nk,m + ∆k
K∑i=0
gki
[(1− θk)r
ni,m+1 + θkr
ni,m
]
k = 0, 1, . . . , K, n = 0, 1, ..., m = 0, 1, ..., M + n
(14)

Численное моделирование переноса вещества в русловом потоке . . . 137
Неявная схема (12) будет иметь вид
rn+1k,m+1 = (1− θk)r
nk,m+1 + θkr
nk,m + ∆k
K∑i=0
gkirn+1i,m+1
k = 0, 1, . . . , K, n = 0, 1, ..., m = 0, 1, ..., M + n
(15)
Сеточный аналог начального условия (7) примет вид
r0k,m = ρ0
k(x00 + mh), k = 0, 1, . . . , K, m = 0, 1, ..., M (16)
Итерационные процессы (14), (16) или (15), (16) надо дополнить формуламивычисления инвариантов Римана rn
k,0 на левой границе расчетной области (нарис. 1b это отрезок [x0
0, xn0 ] характеристики, отвечающей µ0). Рассматриваемом
случае ненулевое значение на [x00, x
n0 ] будет иметь только один инвариант Римана
r0(x00 + µ0t, t) = ρ0
0 exp(g00t), т.е. надо положить
rn0,0 = ρ0
0 exp(g00nτ), rnk,0 = 0, k = 1, . . . , K, n = 1, 2, ... (17)
Заметим, что явная схема (14), (16), (17) устойчива на любом фиксированномвременном отрезке.
4. Численные эксперименты. Рассмотрим описанный выше сеточный ме-тод характеристик для галеркинских функций вида
ϕ0 = 1, ϕn =√
2 cos πnz, n = 1, 2, . . . , K
Формулы (5) дают для элементов матриц A и B и вектора C0 системы (3), (4)следующий результат
a00 =α
6(4 + 3σ), an0 = a0n =
√2α
(πn)2(σ − (−1)n(2 + σ))
ann =α
6
(4 + 3σ − 3
(πn)2
), amn =
2α
π2
n2 + m2
(n2 −m2)2
(σ − (−1)n+m(2 + σ)
)
n,m = 1, 2, . . . , K
bmn = −δmn(λ + (πn)2d), n, m = 0, 1, . . . , K
C00 =
1∫
0
c0(x, z)dz, C0m =
√2
1∫
0
c0(x, z) cos πmz dz, m = 1, 2, . . . , K
В качестве тестовой была рассмотрена задача (1) с начальными данными вида
c0(x, z) =
1− |x− h|
h, |x− h| ≤ h
0, |x− h| > h
На рисунке 3 представлены результаты расчета, полученные в последователь-ные моменты времени t = 0, 3 · 10−3, 1.5 · 10−2, 3 · 10−2 и 4.5 · 10−2 при значениях
138 Нaдолин К.А.
0 0.1 0.2 0.3 0.4 0.5 0.6
0
0.2
0.4
0.6
0.8
1
x
(a)
c
0 0.1 0.2 0.3 0.4 0.5 0.6
0
0.2
0.4
0.6
0.8
1
x
(b)
c
Рис. 3. Результаты расчетов для явной (a) и для неявной (b) схемы
параметров α = 20, λ = 0.01, σ = −0.5, d = 0.1 по явной схеме (14), (16), (17)(рис. 3a) и по неявной схеме (15), (16), (17) (рис. 3b).
Шаг по времени был выбран τ = 3 · 10−4, шаг по пространству составилh = 3 · 10−3 . В обоих случаях использовались 10 галеркинских координатныхфункций по переменной z. Расчеты показали, что предпочтение следует отдатьнеявной схеме, особенностью которой является то, что решение СЛАУ и нахож-дение значений на новом временном слое происходит не для всего слоя, а длякаждого узла отдельно.
Работа выполнена в рамках целевой программы ФАО МОиН РФ “Развитиенаучного потенциала высшей школы” (проект РНП.2.2.1.1.3719)
Список литературы[1] Надолин К.А. Моделирование массопереноса в русловых потоках // В кн. Модели-
рование и вычислительный эксперимент в задачах механики сплошных сред. Т. 1.Ростов-на-Дону: Из-во “ЦВВР”, 2006. С. 18–46.
[2] Рождественский Б.Л., Яненко Н.Н. Системы квазилинейных уравнений и их при-ложения к газовой динамике. М.: Наука, 1978. 688 с.
[3] Дьяконов В.П. MATLAB 6/6.1/6.5+Simulink 4/5 в математике и моделировании.М.: СОЛОН-Пресс, 2003. 576 с.
Nadolin K. A. The numerical modeling of the passive matter transport in super-shallowchannel flow . The algorithm for the numerical solution of the initial and boundary-valueproblem is proposed. This problem had derived in [1] as reduced 3D mathematical model ofthe passive matter transport in slow and smooth, lengthy and super-shallow channel flow.The technique that combined the Galerkin approach and finite difference method on thecharacteristic grid is utilize. The results of numerical test for the explicit and implicit finitedifference schemes has been presented.
КОНЕЧНО-ЭЛЕМЕНТНОЕ МОДЕЛИРОВАНИЕ КОНТАКТНОГОВЗАИМОДЕЙСТВИЯ В ТРИБОСИСТЕМЕ "КОЛЕСО – РЕЛЬС"
С УЧЕТОМ НЕОДНОРОДНОСТЕЙ, ИЗНАШИВАНИЯПРОФИЛЕЙ И ТЕМПЕРАТУРНЫХ ЭФФЕКТОВ
Наседкин А.В.НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону
Рассмотрены особенности конечно-элементного моделирования контактного взаи-модействия в трибосистеме “колесо – рельс”, с учетом неоднородностей механическихсвойств колеса в приповерхностной зоне, изменения формы профиля рельса вследствиеизноса и температурных полей. Комплекс задач исследуется в конечно-элементном па-кете ANSYS, для которого разработан набор программных модулей на макроязыкеAPDL. Установлено, что неоднородность механических свойств и температурные эф-фекты в рассматриваемом диапазоне изменений входных параметров оказывают незна-чительное влияние на характеристики напряженного состояния в зоне контакта, а из-менение профилей контактируемых поверхностей существенно изменяет напряженно-деформированное состояние и контактную зону.
При контактных взаимодействиях в таких трибомеханических системах, какподшипники качения, зубчатые передачи, системы “колесо–рельс–тормозная ко-лодка”, и др., вследствие высоких давлений, температур, пластических деформа-ций и контактной усталости появляются дефекты [1], а также могут изменятьсямеханические свойства материалов в приповерхностных слоях [2]. Перечисленныевыше факторы определяют интерес к исследованию задач механики и термомеха-ники контактных взаимодействий для неоднородных сред. Для анализа реальныхтрибомеханических систем, особенно с учетом неоднородности, температурных по-лей и дефектов, необходимы конечно-элементные подходы [3, 4, 5]. В настоящейработе в продолжение [6, 7] для анализа контактного взаимодействия в трибоси-стеме “колесо–рельс”, с учетом усложненных свойств использована техника методаконечных элементов и разработанное специализированное программное обеспече-ние на языке APDL ANSYS.
При расчете контактного взаимодействия колеса и рельса учитывались иссле-дования [2], в которых было показано, что после продолжительной эксплуатациимеханические свойства в приповерхностных слоях колеса, близких к поверхностикатания, довольно значительно изменяются, причем эти изменения имеют квази-периодический характер по глубине, и на расстоянии от поверхности примерно25-35 мм стабилизируются. Характер зависимости модулей Юнга контактирую-щих тел, обнаруженный в [6], может быть задан функцией:
Ed =
a1 sin(π(d− x0)/b1) + a2, d ≤ X,a2, d > X
(1)
где d отсчитывается по радиальной координате от обода колеса по направлению кцентру. В результате аппроксимации экспериментальных данных для параметров
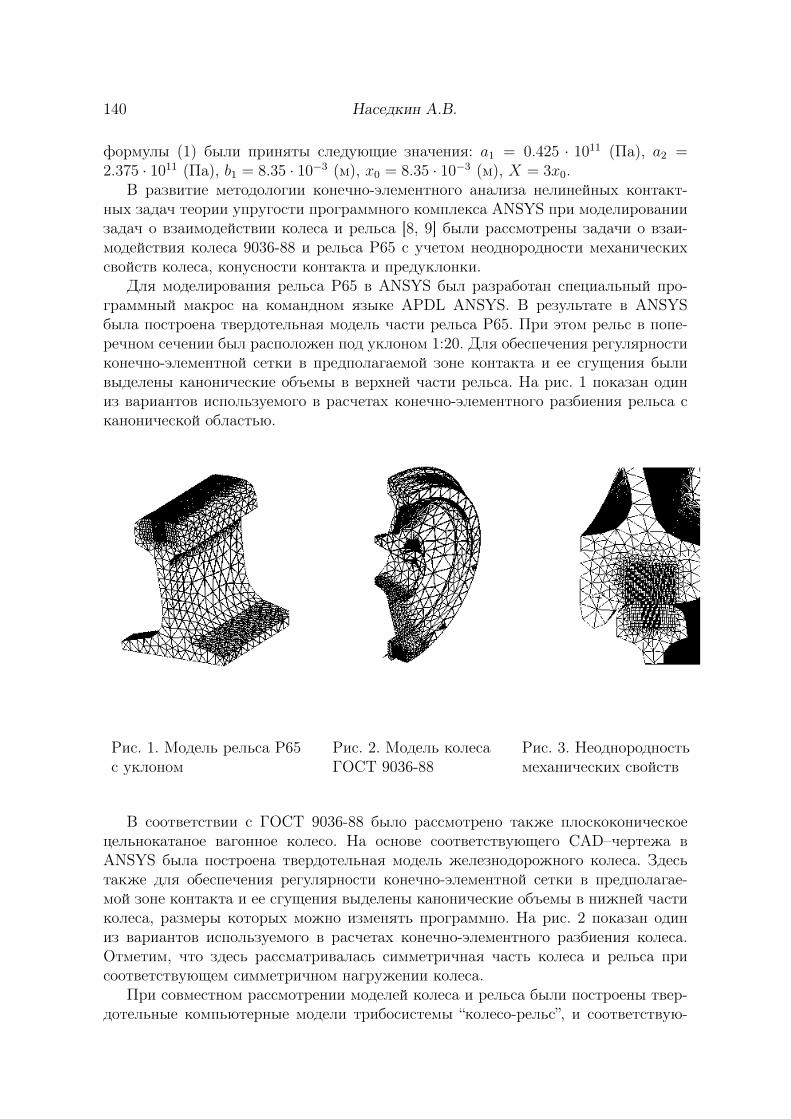
140 Наседкин А.В.
формулы (1) были приняты следующие значения: a1 = 0.425 · 1011 (Па), a2 =2.375 · 1011 (Па), b1 = 8.35 · 10−3 (м), x0 = 8.35 · 10−3 (м), X = 3x0.
В развитие методологии конечно-элементного анализа нелинейных контакт-ных задач теории упругости программного комплекса ANSYS при моделированиизадач о взаимодействии колеса и рельса [8, 9] были рассмотрены задачи о взаи-модействия колеса 9036-88 и рельса Р65 с учетом неоднородности механическихсвойств колеса, конусности контакта и предуклонки.
Для моделирования рельса Р65 в ANSYS был разработан специальный про-граммный макрос на командном языке APDL ANSYS. В результате в ANSYSбыла построена твердотельная модель части рельса Р65. При этом рельс в попе-речном сечении был расположен под уклоном 1:20. Для обеспечения регулярностиконечно-элементной сетки в предполагаемой зоне контакта и ее сгущения быливыделены канонические объемы в верхней части рельса. На рис. 1 показан одиниз вариантов используемого в расчетах конечно-элементного разбиения рельса сканонической областью.
Рис. 1. Модель рельса Р65 Рис. 2. Модель колеса Рис. 3. Неоднородностьс уклоном ГОСТ 9036-88 механических свойств
В соответствии с ГОСТ 9036-88 было рассмотрено также плоскоконическоецельнокатаное вагонное колесо. На основе соответствующего CAD–чертежа вANSYS была построена твердотельная модель железнодорожного колеса. Здесьтакже для обеспечения регулярности конечно-элементной сетки в предполагае-мой зоне контакта и ее сгущения выделены канонические объемы в нижней частиколеса, размеры которых можно изменять программно. На рис. 2 показан одиниз вариантов используемого в расчетах конечно-элементного разбиения колеса.Отметим, что здесь рассматривалась симметричная часть колеса и рельса присоответствующем симметричном нагружении колеса.
При совместном рассмотрении моделей колеса и рельса были построены твер-дотельные компьютерные модели трибосистемы “колесо-рельс”, и соответствую-
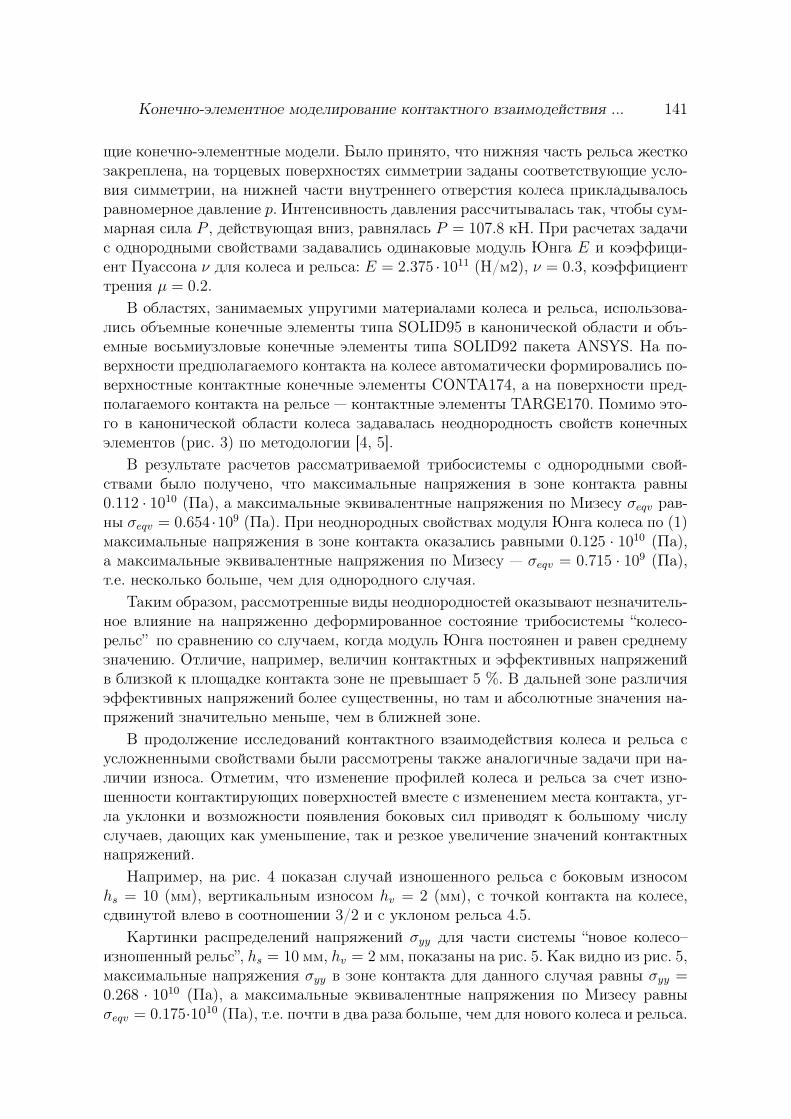
Конечно-элементное моделирование контактного взаимодействия ... 141
щие конечно-элементные модели. Было принято, что нижняя часть рельса жесткозакреплена, на торцевых поверхностях симметрии заданы соответствующие усло-вия симметрии, на нижней части внутреннего отверстия колеса прикладывалосьравномерное давление p. Интенсивность давления рассчитывалась так, чтобы сум-марная сила P , действующая вниз, равнялась P = 107.8 кН. При расчетах задачис однородными свойствами задавались одинаковые модуль Юнга E и коэффици-ент Пуассона ν для колеса и рельса: E = 2.375 ·1011 (H/м2), ν = 0.3, коэффициенттрения µ = 0.2.
В областях, занимаемых упругими материалами колеса и рельса, использова-лись объемные конечные элементы типа SOLID95 в канонической области и объ-емные восьмиузловые конечные элементы типа SOLID92 пакета ANSYS. На по-верхности предполагаемого контакта на колесе автоматически формировались по-верхностные контактные конечные элементы CONTA174, а на поверхности пред-полагаемого контакта на рельсе — контактные элементы TARGE170. Помимо это-го в канонической области колеса задавалась неоднородность свойств конечныхэлементов (рис. 3) по методологии [4, 5].
В результате расчетов рассматриваемой трибосистемы с однородными свой-ствами было получено, что максимальные напряжения в зоне контакта равны0.112 · 1010 (Па), а максимальные эквивалентные напряжения по Мизесу σeqv рав-ны σeqv = 0.654 ·109 (Па). При неоднородных свойствах модуля Юнга колеса по (1)максимальные напряжения в зоне контакта оказались равными 0.125 · 1010 (Па),а максимальные эквивалентные напряжения по Мизесу — σeqv = 0.715 · 109 (Па),т.е. несколько больше, чем для однородного случая.
Таким образом, рассмотренные виды неоднородностей оказывают незначитель-ное влияние на напряженно деформированное состояние трибосистемы “колесо-рельс” по сравнению со случаем, когда модуль Юнга постоянен и равен среднемузначению. Отличие, например, величин контактных и эффективных напряженийв близкой к площадке контакта зоне не превышает 5 %. В дальней зоне различияэффективных напряжений более существенны, но там и абсолютные значения на-пряжений значительно меньше, чем в ближней зоне.
В продолжение исследований контактного взаимодействия колеса и рельса сусложненными свойствами были рассмотрены также аналогичные задачи при на-личии износа. Отметим, что изменение профилей колеса и рельса за счет изно-шенности контактирующих поверхностей вместе с изменением места контакта, уг-ла уклонки и возможности появления боковых сил приводят к большому числуслучаев, дающих как уменьшение, так и резкое увеличение значений контактныхнапряжений.
Например, на рис. 4 показан случай изношенного рельса с боковым износомhs = 10 (мм), вертикальным износом hv = 2 (мм), с точкой контакта на колесе,сдвинутой влево в соотношении 3/2 и с уклоном рельса 4.5.
Картинки распределений напряжений σyy для части системы “новое колесо–изношенный рельс”, hs = 10 мм, hv = 2 мм, показаны на рис. 5. Как видно из рис. 5,максимальные напряжения σyy в зоне контакта для данного случая равны σyy =0.268 · 1010 (Па), а максимальные эквивалентные напряжения по Мизесу равныσeqv = 0.175·1010 (Па), т.е. почти в два раза больше, чем для нового колеса и рельса.

142 Наседкин А.В.
Рис. 4. Модель части системы Рис. 5. Напряжения σyy в плоскости“новое колесо–изношенный рельс” сечения колеса и изношенного рельса
Между тем, для случая бокового износа hs = 5 мм, вертикального износа hv =0.5 мм, с точкой контакта на колесе, сдвинутой от стандартной точки контакта понаправлению гребня на 1.6 мм и с уклоном рельса 4.5 , максимальные давленияуменьшаются и равны σyy = 0.101 · 1010 (Па), а максимальные эквивалентныенапряжения по Мизесу равны σeqv = 0.623 · 109 (Па).
При повороте колеса относительно рельса при контакте с углом набегания те-ряется симметрия задачи относительно перпендикулярной плоскости, необходимостоить модель системы без симметрии и поворачивать колесо относительно про-дольной оси рельса.
Отметим, что при смещении точки первоначального контакта или при увеличе-нии угла набегания и при появлении боковой силы возникает двухзонный контактколеса с рельсом. При этом, как показали проведенные расчеты, с ростом углаатаки контактные напряжения в боковом контакте увеличиваются, а контактныенапряжения в основной части при сохранении главных кривизн контактирующихповерхностей, как правило, уменьшаются.
При исследовании контактного взаимодействия колеса с рельсом с учетом тем-пературных эффектов предполагалось, что в зоне контакта образуются тепло-вые потоки, направленные в сторону колеса и рельса и пропорциональные каса-тельным напряжениям и коэффициентам теплопроводности материалов колеса ирельса.
Конечно-элементный анализ задач с учетом температурных эффектов выпол-нялся в ANSYS в два этапа: сначала решалась чисто температурная задача, азатем вычисленные тепловые поля передавались для расчета контактной зада-чи теории упругости с температурными напряжениями. Были проведены расчетыконтактных и эффективных напряжений в зоне контакта, а также распределе-ний температуры и эффективных напряжений во внутренних областях. Анализрезультатов показал, что температурные эффекты в рассматриваемом диапазонеизменений входных параметров не оказывают существенного влияния на характе-ристики напряженного состояния в зоне контакта.
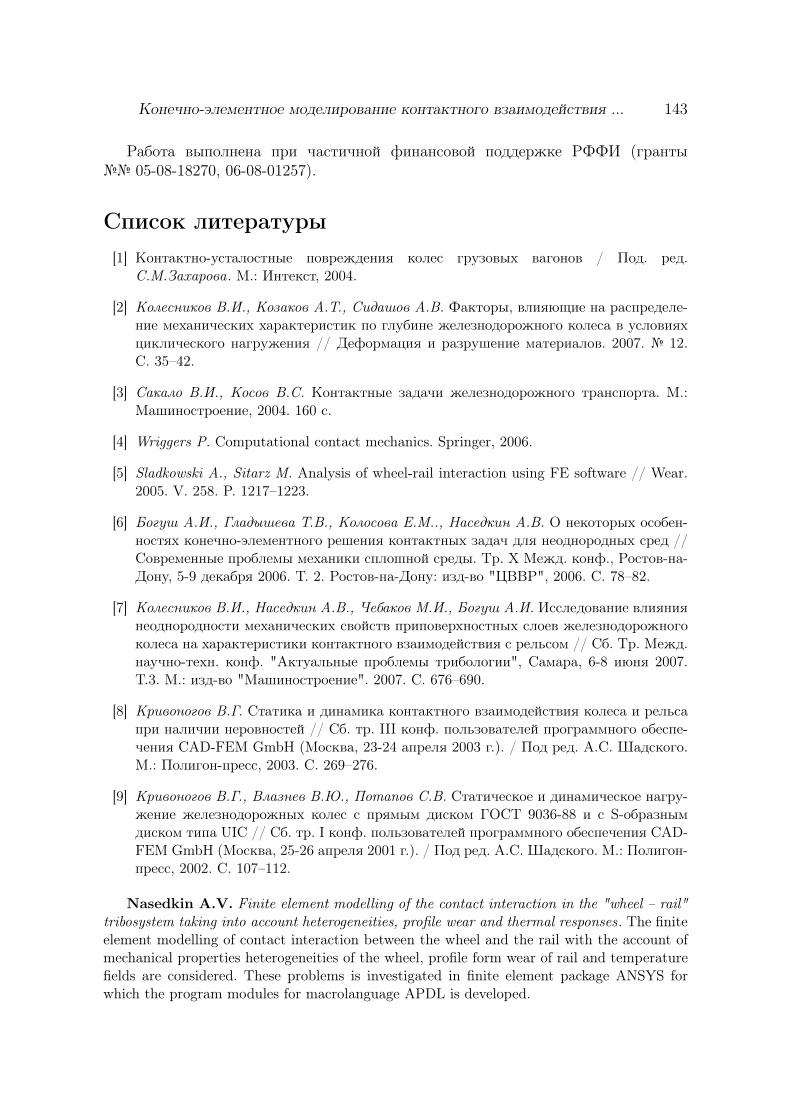
Конечно-элементное моделирование контактного взаимодействия ... 143
Работа выполнена при частичной финансовой поддержке РФФИ (гранты 05-08-18270, 06-08-01257).
Список литературы[1] Контактно-усталостные повреждения колес грузовых вагонов / Под. ред.
С.М.Захарова. М.: Интекст, 2004.
[2] Колесников В.И., Козаков А.Т., Сидашов А.В. Факторы, влияющие на распределе-ние механических характеристик по глубине железнодорожного колеса в условияхциклического нагружения // Деформация и разрушение материалов. 2007. 12.С. 35–42.
[3] Сакало В.И., Косов В.С. Контактные задачи железнодорожного транспорта. М.:Машиностроение, 2004. 160 с.
[4] Wriggers P. Computational contact mechanics. Springer, 2006.
[5] Sladkowski A., Sitarz M. Analysis of wheel-rail interaction using FE software // Wear.2005. V. 258. P. 1217–1223.
[6] Богуш А.И., Гладышева Т.В., Колосова Е.М.., Наседкин А.В. О некоторых особен-ностях конечно-элементного решения контактных задач для неоднородных сред //Современные проблемы механики сплошной среды. Тр. X Межд. конф., Ростов-на-Дону, 5-9 декабря 2006. Т. 2. Ростов-на-Дону: изд-во "ЦВВР", 2006. С. 78–82.
[7] Колесников В.И., Наседкин А.В., Чебаков М.И., Богуш А.И. Исследование влияниянеоднородности механических свойств приповерхностных слоев железнодорожногоколеса на характеристики контактного взаимодействия с рельсом // Сб. Тр. Межд.научно-техн. конф. "Актуальные проблемы трибологии", Самара, 6-8 июня 2007.Т.3. М.: изд-во "Машиностроение". 2007. С. 676–690.
[8] Кривоногов В.Г. Статика и динамика контактного взаимодействия колеса и рельсапри наличии неровностей // Сб. тр. III конф. пользователей программного обеспе-чения CAD-FEM GmbH (Москва, 23-24 апреля 2003 г.). / Под ред. А.С. Шадского.М.: Полигон-пресс, 2003. С. 269–276.
[9] Кривоногов В.Г., Влазнев В.Ю., Потапов С.В. Статическое и динамическое нагру-жение железнодорожных колес с прямым диском ГОСТ 9036-88 и с S-образнымдиском типа UIC // Сб. тр. I конф. пользователей программного обеспечения CAD-FEM GmbH (Москва, 25-26 апреля 2001 г.). / Под ред. А.С. Шадского. М.: Полигон-пресс, 2002. С. 107–112.
Nasedkin A.V. Finite element modelling of the contact interaction in the "wheel – rail"tribosystem taking into account heterogeneities, profile wear and thermal responses. The finiteelement modelling of contact interaction between the wheel and the rail with the account ofmechanical properties heterogeneities of the wheel, profile form wear of rail and temperaturefields are considered. These problems is investigated in finite element package ANSYS forwhich the program modules for macrolanguage APDL is developed.

О СДВИГОВЫХ КОЛЕБАНИЯХ НЕОДНОРОДНОГОАНИЗОТРОПНОГО СЛОЯ
Нестерова Ю.Ю.Донской государственный технический университет, Ростов-на-Дону
Предлагается способ анализа волновых полей и дисперсионных соотношений в неод-нородном анизотропном слое при антиплоской деформации с произвольно по глубинеменяющимися упругими свойствами и плотностью, основанный на сведении краевой за-дачи к интегральному уравнению Фредгольма второго рода и его дальнейшем численноманализе.
Постановка задачи. Задачи о колебаниях неоднородного слоя находят при-ложения в проблемах геофизики, горной механики, нано- и биомеханики. Исследо-вание сдвиговых колебаний наиболее важно, поскольку сдвиговые характеристи-ки биологических тканей меняются в более широких пределах, нежели объемныймодуль. Подобные задачи в изотропном случае проанализированы в [1,2], где изу-чены общие закономерности строения дисперсионных множеств и исследована ихструктура в зависимости от законов изменения плотности и модуля сдвига. В на-стоящей работе анализируется задача о колебаниях ортотропного слоя.
Рассмотрим задачу об установившихся колебаниях с частотой ω неоднород-ного по толщине слоя |x1|, |x2| ≤ ∞, 0 ≤ x3 ≤ h с жестко закрепленным осно-ванием x3 = 0 под действием распределенной нагрузки, определяемой векторомp = (0, p2, 0)e−iωt Предполагается, что модули упругости, используемые в законеГука при нахождении ненулевых компонент тензора напряжений c66(x3), c44(x3) иплотность слоя ρ(x3) являются произвольными кусочно-непрерывными функци-ями поперечной координаты. Задачи рассматриваются в рамках установившихсяколебаний, в этом случае временной множитель e−iωt опускается.
Решение задачи. Компоненты вектора перемещений в этом случае предста-вимы в форме u1 = 0, u2 = u2(x1, x3) , u3 = 0, а уравнение движения имеет вид:
σ12,1 + σ23,3 + ρ(x3)ω2u2 = 0, (1)
где закон Гука представлен в виде
σ12(x3) = c66(x3)u2,1;
σ23(x3) = c44(x3)u2,3.(2)
Граничные условия соответствуют жесткому защемлению нижней грани слоя инагружению на верхней грани
u2(x3)|x3=0 = 0;
σ23(x3)|x3=h = p2(x1).(3)
Замыкают постановку задачи условия излучения волн на бесконечности, в которомиспользован принцип предельного поглощения [1]. Введем в рассмотрение класс

О сдвиговых колебаниях неоднородного анизотропного слоя 145
M+[0, 1], состоящий из положительно определенных функций, имеющих на [0, 1]не более чем конечное число разрывов первого рода. Будем считать, что безраз-мерные модули и плотность принадлежат этому классу функций. При помощипреобразования Фурье по переменной x1
u2(α, x3) =
∫ ∞
−∞u2(x1, x3)e
iαx1dx1, (4)
p2(α) =
∫ ∞
−∞p2(x1)e
iαx1dx1, (5)
σ12(α, x3) = −iαc66(x3)u2(α, x3),
σ23(α, x3) = c44(x3)u2′(α, x3)
(6)
краевая задача (1)–(3) сводится к канонической системе дифференциальных урав-нений первого порядка, при замене
W23(z) = c44(h)−1σ23(zh),
V2(z) = h−1u2(zh),
c44(z) = c44(h)−1c44(zh),
(7)
которая имеет вид
W ′23(z) = (β2γ6(ξ)− k2r(ξ))V2(z),
V ′2(z) = c44(z)−1W23(z)
(8)
с граничными условиями
V2(z)|z=0 = 0,
W23(z)|z=1 = p,(9)
где введены безразмерные параметры
γ4(ξ) = c44(hξ)/c44(h),
γ6(ξ) = c66(hξ)/c44(h),
r(ξ) = ρ(hξ)/ρ(h),
p(β) = p(β/h)/c44(h),
V (β, z) = u(β/h, hz)/h.
(10)
Переходя к безразмерным параметрам от краевой задачи (8), (9) и решив систе-му дифференциальных уравнений, получим следующее интегральное уравнениеФредгольма второго рода
V (β, z) =
∫ 1
0
K(β, z, ξ)V (β, ξ)dξ + f(β, z), zε[0, 1], (11)

146 Нестерова Ю.Ю.
где ядро уравнения (11)
K(β, z, ξ) = (k2r(ξ)− β2γ6(ξ))
∫ min(z;ξ)
0
γ−14 (τ)dτ, (12)
а также функция из интегрального уравнения (11)
f(β, z) = p(β)
∫ z
0
γ−14 (ξ)dξ (13)
и параметрыk2 = ρ(h)ω2h2/c44(h),
β2 = α2h2.(14)
Решение сформулированной задачи может быть осуществлено только числен-ным путем при задании соответствующих законов неоднородности, которые могутиметь разрывы первого рода.
Дисперсионные множества. Дисперсионные множества — это те сочета-ния параметров, при которых рассматриваемая система с однородными краевымиусловиями имеет нетривиальное решение. Для нахождения дисперсионных мно-жеств использован метод сведения к интегральному уравнению. В рассматривае-мом случае необходимо анализировать однородное интегральное уравнение Фред-гольма второго рода (6), находя те сочетания параметров, при которых оно имеетнетривиальное решение. Для этого проведем дискретизацию, отрезок zε[0, 1] де-лим на N частей.
z = [z1, z2, ...., zN+1]. (15)
Затем, используя метод коллокаций, и удовлетворяя уравнение (11) в выбранномнаборе точек, получим
V (β, zj) =
∫ 1
0
K(β, zj, ξ)V (β, ξ)dξ + f(β, zj), j = 1..N + 1. (16)
Применяя для дискретизации интегрального оператора (16) квадратурные фор-мулы (в данном примере — это метод трапеции), перейдем от интегрального урав-нения к системе линейных алгебраических уравнений.
V (β, zj) =N+1∑i=1
K(β, zj, zi)V (β, zi) + f(β, zj), j = 1..N + 1, (17)
где введен N + 1-мерный вектор
V = (V (β, z1), V (β, z2)...V (β, zN+1)). (18)
Таким образом (17) приводится к виду
D(k, β)V (β) = F (β). (19)
Сочетания параметров k и β, при которых линейная алгебраическая система (19)неразрешима, и образует дисперсионное множество задачи. Приравнивая к нулю

О сдвиговых колебаниях неоднородного анизотропного слоя 147
определитель матрицы D(k, β) и решая полученное уравнение относительно k и β,определим точки дисперсионного множества рассматриваемой задачи. Подобныесхемы расчета реализованы для конкретных законов неоднородности в [3]. Нетруд-но установить некоторые общие свойства структуры этого множества, которое со-стоит из конечного числа вещественных ветвей, исходящих из точек, образующихспектр задач, получающиеся при β = 0.
Частный случай. Рассмотрим случай для постоянных γ6, γ4. Тогда систе-ма (8) примет вид
W ′23(z) = (γ6β
2 − rk2)V2(z),
V ′2(z) = γ−1
4 W23(z),(20)
а граничные условия (9) запишутся в виде
V2(z)|z=0 = 0,
W23(z)|z=1 = p.(21)
Разрешив систему (20) относительно функции V2, получим
V ′′2 + γ−1
4 (rk2 − γ6β2)V2 = 0. (22)
Уравнение (22) имеет общее решение вида
V2 = c1sin(√
γ−14 (rk2 − γ6β2)z) + c2cos(
√γ−1
4 (rk2 − γ6β2)z). (23)
Для построения дисперсионных кривых нужно найти те сочетания параметров kи β, для которых неоднородная задача неразрешима. Таким образом для точекдисперсионных кривых получим следующее соотношение
r
γ4
k2 − γ6
γ4
β2 = π2(1/2 + n)2, n = 0.. (24)
Эти соотношения описывают семейство гипербол, число вещественных компоненткоторых зависит от частоты колебаний. В случае γ6 = 1, γ4 = 1, r = 1 соотноше-ние (24) принимает тот же вид, что и в изотропном случае
k2 − β2 = π2(1/2 + n)2, n = 0.. (25)
Автор выражает благодарность Ватульяну А.О. за помощь в постановке задачии внимание к работе.
148 Нестерова Ю.Ю.
Список литературы[1] Ворович И.И., Бабешко В.В. Динамические смешанные задачи теории упругости для
неклассических областей. // М.: Наука, 1979. 319 с.
[2] Ватульян А.О., Двоскин М.А. Сатуновский П.С.О колебаниях неоднородного упру-гого слоя.// ПМТФ. 2006. 3,С.157-164.
[3] Ватульян А.О., Двоскин М.А., Сатуновский П.С. Прямые и обратные задачи длянеоднородного слоя. // Труды X Международной конференции “Современные про-блемы механики сплошной среды”. 2006. T. 1. С. 76–81.
Nesterova J.J. About shift fluctuations of a non-uniform anisotropic layer . The way ofthe analysis of wave fields and dispersive parities in a non-uniform anisotropic layer is offeredat antiflat deformation with any on depth varying elastic properties and in the density, theregional problems based on data to integrated equation Fredgolm of the second sort and itsfurther numerical analysis.

К ИССЛЕДОВАНИЮ УСТАНОВИВШИХСЯ КОЛЕБАНИЙУПРУГОЙ СРЕДЫ С ПОКРЫТИЕМ ПРИ НАЛИЧИИ
ВНУТРЕННИХ ДЕФЕКТОВ
Павлова А.В., Рубцов С. Е.Кубанский государственный университет, Краснодар
В рамках метода факторизации исследуются установившиеся колебания упругого по-лупространства слоистой структуры, имеющего покрытия и содержащего жесткие вклю-чения. Последние располагаются как внутри слоев, так и в плоскостях раздела механи-ческих свойств. В качестве покрытий рассматриваются пластины, движение которыхописывается системой линейных дифференциальных уравнений в перемещениях.
В настоящее время динамические задачи теории упругости для сред с покрыти-ями вызывают особый интерес. Так для повышения прочностных свойств матери-алов широко используются различного рода покрытия и накладки, исследованиенапряженного состояния горных пород также сводится к задачам для упругихсред с покрытиями, в качестве которых могут рассматриваться пластины и обо-лочки.
В работе рассматривается задача о колебаниях полуограниченной упругойсреды с покрытием. Подложка представляет собой полупространство, возможно,слоисто-неоднородное, имеющее внутренние дефекты в виде плоских трещин ивключений, занимающие области Ωi : в плоскостях
−∞ ≤ x1, x2 ≤ ∞, x3 = hi
(i = 1, n− 1
), x3 < 0.
В качестве покрытия рассматривается пластина (система пластин), движениекоторой описывается дифференциальными уравнениями [1]
∂2v1
∂x21
+1− µ
2· ∂2v1
∂x22
− γ
g· 1− µ2
E
∂2v1
∂t2+
1 + µ
2· ∂2v2
∂x1∂x2
+1− µ2
Ehp1 = b1,
1 + µ
2
∂2v1
∂x1∂x2
+∂2v2
∂x22
+1− µ
2· ∂2v2
∂x21
− γ
g· 1− µ2
E
∂2v2
∂t2+
1− µ2
Ehp2 = b2,
h
12∇4v3 +
γ
g· 1− µ2
E
∂2v3
∂t2− 1− µ2
Ehp3 = b3,
где h – толщина пластины, µ, E – соответственно модуль сдвига и модуль Юнга,λ = 2νµ
1−2ν= νE
(1−2ν)(1+ν), ν – коэффициент Пуассона, g – ускорение силы тяжести, γ –
удельный вес материала, v1,2 (x, t) – перемещения точек срединной поверхностивдоль координатных линий, v3 (x, t) – прогиб срединной поверхности, pi (x, t) –компоненты усилий, i = 1, 3, x = (x1, x2).

150 Павлова А.В., Рубцов С.Е.
Для установившихся с частотой ω колебаний (v (x, t) = u (x) e−iωt, b (x, t) == f (x) e−iωt) уравнения движения пластины можно представить в виде
R (∂x1, ∂x2)u− Sq = f ,
где
R11 =∂2
∂x21
+β1∂2
∂x22
+β2, R12 = β3∂2
∂x1∂x2
, R21 = β3∂2
∂x1∂x2
, R22 =∂2
∂x21
+β1∂2
∂x22
+β2,
R33 = β4
(∂4
∂x41
+ 2∂2
∂x21
· ∂2
∂x22
+∂4
∂x42
)− β2, R13 = R23 = R31 = R32 = 0.
Здесь и далее использованы обозначения β1 = 0,5 (1− µ), β2 =ω2γ(1−µ2)
gE,
β3 = 0,5 (1 + µ), β4 = h2/12, β5 = 1−µ2
Eh, q = (q1, q2, q3)
T – вектор контактныхнапряжений, действующих на границе покрытия и подложки, p (x, t) = q (x) e−iωt,S = ‖sik‖i,k=1,3, sij = 0, i 6= k, sii = −β5.
Использование этой модели оболочки позволяет достичь достаточной точностипри решении ряда практических задач [1].
Для подложки, на которой находятся пластины покрытия, можно приниматьразличные модели упругой среды. В частности, может быть рассмотрено одно-родное или слоистое полупространство с дефектами. Для любой из моделей мо-гут быть получены соотношения между амплитудами напряжений qk и перемеще-ний uk, k = 1, 3 на поверхности подложки.
Для построения матриц-символов Грина для сред с дефектами используетсяметод, основанный на разбиении среды на плоскопараллельные слои, в плоскостяхраздела которых выполняются разрывные граничные условия для амплитуд век-торов напряжений (в областях включений) и перемещений (в областях трещин),позволяющий исследовать как однородные, так и слоистые среды [2,3]. Так дляполупространства, содержащего жесткие включения
KnQn +n−1∑i=1
KiUi = Un,
где Un (α1, α2), Qn (α1, α2) – Фурье-образы амплитуд перемещений и напряженийна поверхности подложки, Ui (α1, α2) – Фурье-образы амплитуд перемещений, за-данных в плоскостях включений. Элементы блочных матриц Ki, i = 1, n не при-водятся ввиду громоздкого вида.
Используя подход, описанный в [4], применив к уравнениям движения пласти-ны преобразование Фурье по переменным x1, x2 и подставив в них соотношениедля перемещений верхней границы подложки, получим систему функциональныхуравнений
[R (−iα1,−iα2)Kn (α1, α2)− S]Qn (α1, α2) = G (α1, α2) ,
К исследованию установившихся колебаний упругой среды с покрытием 151
G (α1, α2) = F (α1, α2)−R (−iα1,−iα2)n−1∑i=1
KiUi.
Элементы матрицы K = R (−iα1,−iα2)Kn (α1, α2) − S имеют степенной ростпри
√α2
1 + α22 → ∞. Путем выноса из обеих частей соотношения дифференци-
ального оператора, система приводится к виду, позволяющему использовать дляее решения один из развитых методов, основанных на факторизации матриц-функций [5,6].
Работа выполнена при поддержке гранта РФФИ (06-01-00295, 06-01-96802, 06-01-08017, 06-08-00671, 06-01-96638) и гранта Президента РФ НШ-4839.2006.1
Список литературы[1] Вольмир А.С. Нелинейная динамика пластинок и оболочек. М.: Наука, 1972. 432 с.
[2] Бабешко В.А. Среды с неоднородностями (случай совокупностей включений и тре-щин) // Изв. РАН. Механика твердого тела. 2000. 3. С. 5–9.
[3] Павлова А.В., Рубцов С.Е. Среды с неоднородностями (случай совокупностейвключений и трещин) / Наука технологии: труды XXIV Росс. школы. М.: Изд. РАН,2004. С. 283–290.
[4] Бабешко В.А., Бабешко О.М., Евдокимова О.В. К проблеме исследования матери-алов с покрытиями // Доклады АН. 2006. Т. 410. 1. С. 49–52.
[5] Бабешко В.А. Обобщенный метод факторизации в пространственных динамиче-ских смешанных задачах теории упругости. М.: Наука, 1984. 256 с.
[6] Бабешко В.А., Бабешко О.М. О методе факторизации в краевых задачах длясплошных сред// Доклады АН. 2006. Т. 399. 3. С. 315–318.
Pavlova A.V, Rubtsov S.E. On the investigation of vibrations of elastic medium withcoating and inside defects on the basis of factorization method . Vibrations of elastic half-spacewith coating and inside defects are investigated in the context of factorization method. Thecoating is considered as a plate which motion is described by systems of linear differentialequations in displacements.
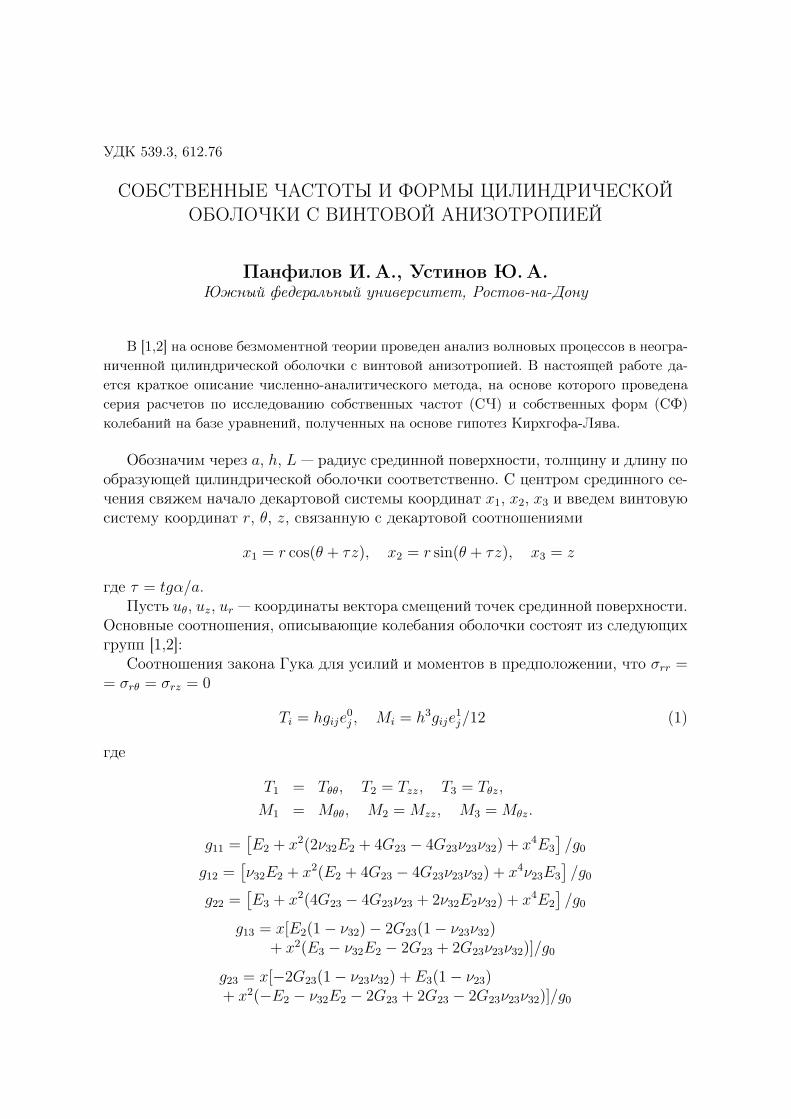
УДК 539.3, 612.76
СОБСТВЕННЫЕ ЧАСТОТЫ И ФОРМЫ ЦИЛИНДРИЧЕСКОЙОБОЛОЧКИ С ВИНТОВОЙ АНИЗОТРОПИЕЙ
Панфилов И.А., Устинов Ю.А.Южный федеральный университет, Ростов-на-Дону
В [1,2] на основе безмоментной теории проведен анализ волновых процессов в неогра-ниченной цилиндрической оболочки с винтовой анизотропией. В настоящей работе да-ется краткое описание численно-аналитического метода, на основе которого проведенасерия расчетов по исследованию собственных частот (СЧ) и собственных форм (СФ)колебаний на базе уравнений, полученных на основе гипотез Кирхгофа-Лява.
Обозначим через a, h, L — радиус срединной поверхности, толщину и длину пообразующей цилиндрической оболочки соответственно. С центром срединного се-чения свяжем начало декартовой системы координат x1, x2, x3 и введем винтовуюсистему координат r, θ, z, связанную с декартовой соотношениями
x1 = r cos(θ + τz), x2 = r sin(θ + τz), x3 = z
где τ = tgα/a.Пусть uθ, uz, ur — координаты вектора смещений точек срединной поверхности.
Основные соотношения, описывающие колебания оболочки состоят из следующихгрупп [1,2]:
Соотношения закона Гука для усилий и моментов в предположении, что σrr == σrθ = σrz = 0
Ti = hgije0j , Mi = h3gije
1j/12 (1)
где
T1 = Tθθ, T2 = Tzz, T3 = Tθz,
M1 = Mθθ, M2 = Mzz, M3 = Mθz.
g11 =[E2 + x2(2ν32E2 + 4G23 − 4G23ν23ν32) + x4E3
]/g0
g12 =[ν32E2 + x2(E2 + 4G23 − 4G23ν23ν32) + x4ν23E3
]/g0
g22 =[E3 + x2(4G23 − 4G23ν23 + 2ν32E2ν32) + x4E2
]/g0
g13 = x[E2(1− ν32)− 2G23(1− ν23ν32)+ x2(E3 − ν32E2 − 2G23 + 2G23ν23ν32)]/g0
g23 = x[−2G23(1− ν23ν32) + E3(1− ν23)+ x2(−E2 − ν32E2 − 2G23 + 2G23 − 2G23ν23ν32)]/g0

Собственные частоты и формы цилиндрической оболочки с винтовой ... 153
g33 = [(1− ν23ν32)G23(1− x2)2 + x2(E2 − ν23E2 + E3 − ν32E3)]/g0
g0 = (1 + x2)2(1− ν23ν32).
g23 = x[−2G23(1− ν23ν32) + E3(1− ν23)+ x2(−E2 − ν32E2 − 2G23 + 2G23 − 2G23ν23ν32)]/g0
g33 = [(1− ν23ν32)G23(1− x2)2
+ x2(E2 − ν23E2 + E3 − ν32E3)]/g0
g0 = (1 + x2)2(1− ν23ν32).
e01 = ur/a, e0
2 = ∂zuz, e03 = ∂zuθ
e11 = 0, e1
2 = −∂2zur, e1
3 = ∂zuθ/a,
Здесь E1, E2, E3, G12, G13, G23, ν12, ν13, ν23 — технические константы [3]; ∂z — част-ная производная по z; x = aτ = tgα.
Замыкают цепочку основных соотношений уравнения движения
∂2zM2 − T1/a− hρ∂2
t ur = 0
∂zT2 − hρ∂2t uz = 0 (2)
∂zM3 + a∂zT3 − haρ∂2t uθ = 0
Здесь ρ – плотность материала оболочки.В качестве примера рассмотрим свободные гармонические колебания оболочки,
симметричные относительно сечения z = 0, при граничных условиях жесткойзаделки
z = ±L/2 : uθ = uz = ur = 0, ∂zuz = 0 (3)
Отыскивая решение в виде
uθ = X1 sin(kz)eiωt, uz = X2 sin(kz)eiωt, ur = X3 cos(kz)eiωt (4)
На основе приведенных выше соотношений получаем однородную алгебраиче-скую систему
A ~X = 0 (5)
где ~X = (X1, X2, X3)T , A = (aij) (i, j = 1, 2, 3). Условие существования нетриви-
ального решения этой системы приводит к дисперсионному уравнению
det(A) = D1(γ, Ω) = 0 (6)
Функция D1(γ, Ω) является полиномом восьмого порядка относительно безразмер-ного волнового числа γ = ak, коэффициенты которого зависят от безразмернойчастоты Ω = aω/c, (c2 = E2/ρ), всех модулей упругости, коэффициентов Пуассонаи безразмерных геометрических параметров ε = h/a, x. Корни уравнения распо-ложены симметрично в комплексной плоскости γ = α + iβ. При низкочастотныхколебаниях (Ω << 1) спектр волновых чисел состоит из двух пар вещественных

154 Панфилов И.А., Устинов Ю.А.
волновых чисел γ±1 = ±α1, γ±2 = ±α2 и четырех комплексных γs, s = 5, ..., 8.Вещественным волновым числам отвечают квазипродольные и квазикрутильныеоднородные волны (характер этих волн в рамках безмоментной теории подробноисследован в [2]), комплексным волновым числам — неоднородные волны, которыелокализуются около торцов оболочки z = ±LL/2 отвечают четыре неоднородныхволны. Каждой паре симметрично расположенных корней отвечает один и тотже СВ ~Xm = (Xm1, Xm2, Xm3), (m = 1, ..., 4).
Для координат амплитуд вектора смещений на основании (4) получаем общеепредставление решения
Uθ =4∑
m=1
CmXm1 sin(γmζ), Uz =4∑
m=1
CmXm1 sin(γmζ)
Ur =4∑
m=1
CmXm1 cos(γmζ), ζ = z/a (7)
где произвольные постоянные Cm. Подставляя (7) в граничные условия (3) полу-чаем однородную алгебраическую систему для определения Cm, условие разреши-мости которой
D2(γ, Ω, l) = 0 (8)
в совокупности с уравнением (6) служит для определения множества собственныхчастот.
В случае отсутствия винтовой анизотропии (α = 0) множество СЧ и отвечаю-щих им СФ разделяется на два подмножества, одно их которых описывают чистопродольные, а другое — чисто крутильные собственные колебания. При α 6= 0 СФстановятся квазипродольными и квазикрутильными. Для того, чтобы различатьих исследовалось поведение амплитудных коэффициентов
kθ =Uθ
U, kz =
Uz
U, U =
√(U2
θ + U2z + U2
r )
в зависимости от параметров l, α.Ниже приведены некоторые результаты расчетов со следующими параметрами:
E2 = 4.905 · 105 кН/м2, E3 = 0.833 · E2, ν32 = 0.45, ν23 = 0.54, h = 6 · 10−4 м,a = 7.3 · 10−3 м, G23 = E2/6.
На рис. 1 изображены зависимости первых двух СЧ при фиксированном па-раметре α (tan(α) = 0.1) от безразмерной длины l = L/2a. Кривая 1 отвечает“квазикрутильной” моде, кривая 2 — “квазипродольной” моде.
На рис. 2.a) (w = 4 · Pi) и рис. 2.б) (w = 8 · Pi). приведены зависимостиамплитудных коэффициентов от угла закручивания α(α ∈ [0..P i/2]). На рис.2.a)амплитудные коэффициенты (1 − kz, 2 − kθ) соответствуют “квазикрутильным”модам, т.е. таким, у которых при α = 0 и α = 90 отсутствует продольная де-формация. На рис. 2.б) амплитудные коэффициенты (1−kz, 2−kθ) соответствуют“квазипродольным” модам, т.е. таким, у которых при α = 0 и α = 90 отсутствуеткрутильная деформация.
Работа выполнена при финансовой поддержке РФФИ (грант 0701 00254а).
Собственные частоты и формы цилиндрической оболочки с винтовой ... 155
Рис. 1.
Рис. 2.
Список литературы[1] Устинов Ю.А. Некоторые задачи для тел с винтовой анизотропией // Успехи ме-
ханики, октябрь-декабрь 2003 г. С. 37–62.
[2] Богаченко С.Е., Устинов Ю.А. Некоторые особенности волновых процессов в ци-линдрической оболочке с винтовой анизотропией // Экологический вестник науч-ных центров ЧЭС. 2006. 1. С. 18–21.
[3] Лехницкий С.Г. Теория упругости анизотропного тела. М.: “Наука”, 1977. 415 с.
Panfilov I.A., Ustinov U.A. Own frequencies and own forms of a cylindrical envi-ronment with Screw anisotropy. In this work the brief description numerical-analytical amethod on the basis of which a series of calculations on research of own frequencies andown forms of fluctuations is leadcarried out on the basis of the equations received on the basisof hypotheses Kirchhoff-Love is given.
МАЛОМОДОВЫЕ МОДЕЛИ ДИНАМИКИ ДВУМЕРНЫХТЕЧЕНИЙ ИДЕАЛЬНОЙ НЕСЖИМАЕМОЙ ЖИДКОСТИ
Петровская Н. В.Южный федеральный университет, Ростов-на-Дону
Метод Галёркина в сочетании с методом малого параметра применяется для изуче-ния уравнения типа Рауса динамики двумерных течений идеальной несжимаемой жидко-сти. Рассматриваются две простые модели, описывающие эволюцию некоторых вихревыхдвижений в прямоугольной области.
1. ВведениеВ работе В.И. Юдовича [1] (см. также [2]) изучается уравнение Эйлера дина-
мики идеальной несжимаемой жидкости в односвязной области D, обладающеев лагранжевой форме бесконечным набором интегралов циркуляции. Процедуройисключения этих интегралов лагранжевы уравнения гидродинамики приводятся ксистеме интегро-дифференциальных уравнений без связей, которая, вместо инте-гралов циркуляции, имеет бесконечную серию интегралов — якобианов det(∂x/∂a)для каждой жидкой частицы (a — начальное положение жидкой частицы приt = 0, x(a, t) — ее положение в момент времени t). В двумерном случае уравне-ние несжимаемости det(∂x/∂a) = 1 локально может быть разрешено. Для этогопроизводится одновременная замена независимых переменных и функций (см.,например, [3])
a1 = α1 + Φα2 , a2 = α2 − Φα1 , x1 = α1 − Φα2 , x2 = α2 + Φα1 , (1)
где Φ(α, t), α = (α1, α2) — новая неизвестная функция. В силу этой замены уравне-ние несжимаемости тождественно удовлетворяется для любой гладкой функции Φ.Для взаимной однозначности замены (1) требуется, чтобы якобиан
J(α, t) =∂(a1, a2)
∂(α1, α2)= 1 + Φα1α1Φα2α2 − Φ2
α1α2(2)
был отличен от нуля.Для производящей функции Φ(α, t) получено замкнутое интегро-дифференци-
альное уравнение
2Φt = −∫
D
G(α1 − Φα2 , α2 + Φα1 , y1, y2) · ω0(b)|J(β, t)|dβ, (3)
где b = (b1, b2) и y(b, t) = (y1, y2) связаны с β = (β1, β2) такими же соотношениями,как соотношения (1), которые связывают a и x с α; переменные α и β пробегаютобласть D; J(β, t) определяется аналогично (2). G(x, y) — функция Грина краевойзадачи
−∆ψ = ω, ψ|∂D = 0,
Модели динамики двумерных течений идеальной несжимаемой жидкости 157
для функции тока ψ поля v = (v1, v2). В плоском случае вихрь имеет только однуненулевую компоненту ω3 = ω; ω0(b) — начальное поле вихря.
Уравнение (3) нужно решать при нулевом начальном условии Φ|t=0 = 0.В.И. Юдович предполагал, что это уравнение может оказаться эффективнымсредством численного анализа течений идеальной жидкости, так как его глав-ный недостаток (неявная форма замены (1)) возмещается тем достоинством, чтокак уравнение неразрывности, так и закон сохранения вихря выполняются точно.
2. Конечномерные галеркинские аппроксимацииПусть область D — квадрат 0 ≤ x1 ≤ 1, 0 ≤ x2 ≤ 1. Тогда функция Грина
G(x, y) определяется соотношением:
G(x, y) =4
π2
∞∑i=1
∞∑j=1
ϕij(x) · ϕij(y) · 1
i2 + j2(4)
где ϕij(x) = sin (πix1) · sin (πjx2). Подставляя (4) в (3) и возвращаясь к интегри-рованию по b, приходим к уравнению
Φt = − 2
π2
∞∑i=1
∞∑j=1
ϕij(x)
i2 + j2·∫
D
ϕij(y) · ω0(b)db
Для его решения применяется метод Галёркина в сочетании с методом малогопараметра. Приближенные решения разыскиваются в виде:
Φ(α, t) =∑m,n
cmn(t) · ϕmn(α), (5)
где суммирование ведется по фиксированному конечному множеству пар индек-сов (m,n). Применяя стандартную процедуру метода Галёркина, получаем систе-му обыкновенных дифференциальных уравнений для определения cmn(t):
cmn = − 8
π2
∑i,j
1
i2 + j2Kij · Aijmn (6)
где
Aijmn =
∫
D
ϕij(x) · ϕmn(α) dα, Kij =
∫
D
ϕij(y) · ω0(b) db. (7)
Уравнения (6) существенно нелинейны: аргументы x и y тригонометрическихфункций под знаком интеграла в (7) зависят от Φ. Для получения более простыхконечномерных моделей воспользуемся тем, что уравнение (3) нужно решать принулевом начальном условии Φ|t=0 = 0. Найдем проекцию начального поля вихряна выбранное подпространство:
w(b) =∑p,q
wpq · ϕpq(b), wpq = 4
∫
D
ω0(b) · ϕpq(b) db.

158 Петровская Н.В.
Тогда:
Kij∼=
∑p,q
wpq ·∫
D
ϕij(y) · ϕpq(b)db.
Решение системы (6) должно удовлетворять нулевым начальным условиям:cmn(0) = 0. При t = 0 замена (1) является тождественной : x = α = a, y = β = b, и
cmn(0) = − wmn
2π2(m2 + n2).
Поскольку не теряя общности можно считать, что w(b) = O(1), то cmn(t) = O(ε) навременах порядка ε, ε ¿ 1. Поэтому для вычисления правых частей системы (6)как функций галеркинских коэффициентов ckl(t) можно использовать метод ма-лого параметра, аппроксимируя правые части уравнений отрезками ряда Тейло-ра. Если (в простейшем случае) ограничиться линейными относительно неизвест-ных ckl функциями, то получим следующую систему линейных дифференциаль-ных уравнений с постоянными коэффициентами
cmn = − wmn
2π2(m2 + n2)+
∑
k,l
ckl
∑p,q
wpq · Epqklmn (8)
где
Epqklmn =1
8
[rpqklmn − rmnklpq
m2 + n2− rpqklmn
p2 + q2
], rijklmn = kj · simk · slnj − il · skmi · sjnl,
slmn = +1 при n = |l −m|; slmn = −1 при n = l + m; slmn = 0 при n 6= |l ±m|.Cистемы (6) и (8), так же как и исходное уравнение (3), являются локальны-
ми (по лагранжевым переменным a, по времени t и по начальным полям скоро-сти). Чтобы преодолеть это ограничение и исследовать поведение решений урав-нения (3) на достаточно больших временных отрезках, можно воспользоваться ре-цептом, предложенным В.И. Юдовичем [1]: приближенное решение уравнения (3)ищется на промежутке t ∈ [0, t1], после чего делается новая замена типа (1), гдеза начальный момент времени принимается значение t = t1, и так далее.
3. Простейшие моделиИсследование галеркинских аппроксимаций (6) и (8) естественно начать с про-
стых случаев. Простейшая линейная нетривиальная модель получается из (8),если ограничиться в представлении порождающей функции (5) первыми тремяслагаемыми:
Φ = c11 · ϕ11 + c12 · ϕ12 + c21 · ϕ21.
Для определения cij(t) при заданном начальном поле вихря получается система:
c11 = −w11
4π2− 3
10c12w21 +
3
10c21w12
c12 = − w12
10π2+
3
80c21w11 +
3
40c11w21 (9)
c21 = − w21
10π2− 3
80c12w11 − 3
40c11w12

Модели динамики двумерных течений идеальной несжимаемой жидкости 159
Введем векторы z, W :
(c11, c12, c21) = 2/(3π2) · (2z1, z2, z3), (w11, w12, w21) = (−4W1,W2, W3)
и сделаем замену времени t = (20/3)τ . В результате система (9) приводится к виду
z = IW − [z, W ], I = diag(5,−1,−1). (10)
Очевидно, что при любом начальном поле вихря система (10) не имеет изолиро-ванных равновесий. Решение задачи Коши с нулевыми начальными данными опре-деляется явными формулами, причем zi(t) — функции вида k1t + k2 + k3sin(Ωt) +k4cos(Ωt). В частности, если ei — координатные орты, то:
z = Iei · t при W = ei. (11)
Однако, эти соотношения имеют смысл только на достаточно малом промежут-ке времени [0, t1]. Далее нужно при t = t1 по производящей функции восстановитьполе вихря, принять момент времени t1 в качестве начального и найти новое ре-шение задачи Коши для системы (9).
Для определения поля вихря по известной производящей функции Φ(α, t) вос-пользуемся соотношением
ω(x(a, t), t) = ω0(a). (12)
Разыскивая ω(x, t) в виде
ω(x, t) =∑p,q
vpq(t) · ϕpq(x), (13)
из (12) в линейном (относительно cij) приближении находим
v11(t) = w11 + 3/2π2(c12(t)w21 − c21(t)w12)
v12(t) = w12 + 3/2π2(c21(t)w11 − c11(t)w21) (14)v21(t) = w21 + 3/2π2(c11(t)w12 − c12(t)w11)
Полагая в (14) t = t1 и подставляя найденные значения vij в (13), находим новоеначальное поле вихря.
Структура уравнений (9), (14) становится особенно наглядной, если сделать за-мену времени t = (80/3)τ и перейти к векторным величинам c = 3/2π2(c11, c12, c21),w = (w11, w12, w21), v = (v11, v12, v21):
c = −Dw + L(w)c, (15)
v = w + [c,w], (16)
где
L(w) =
0 −8w21 8w12
2w21 0 w11
−2w12 −w11 0
а D — диагональная матрица: D = diag(10, 4, 4). Отметим, что Sp L(w) = 0,det L(w) = 0.
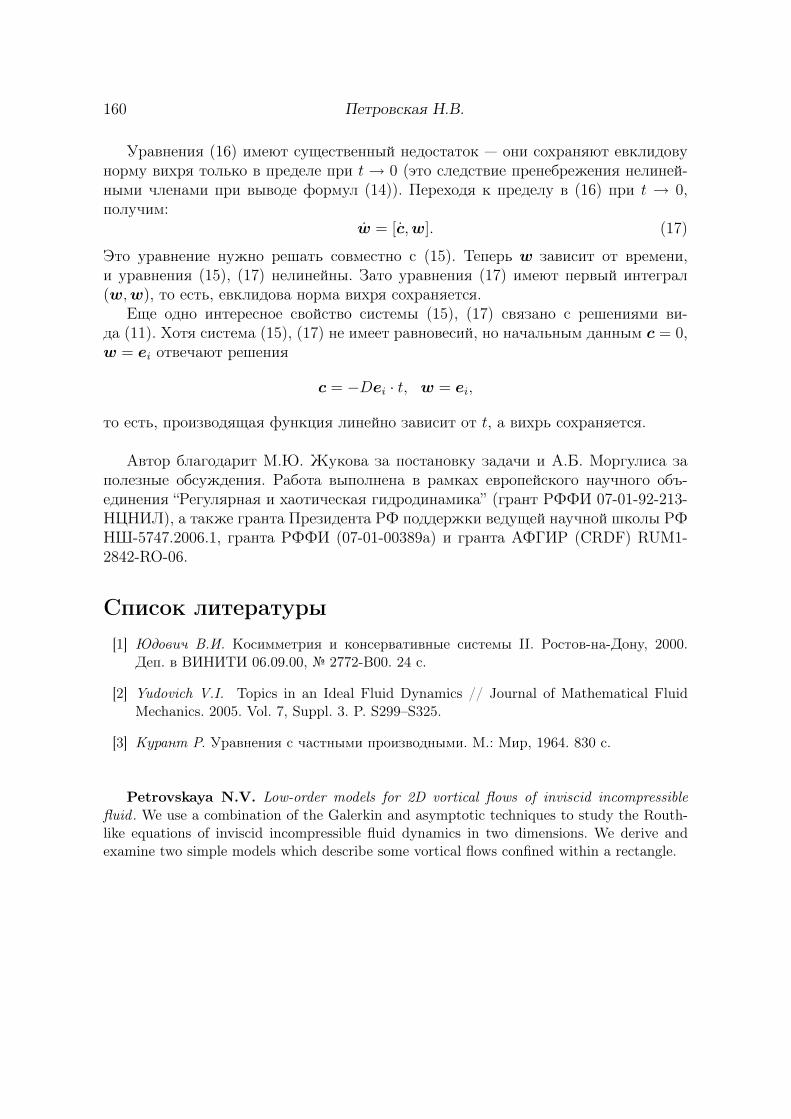
160 Петровская Н.В.
Уравнения (16) имеют существенный недостаток — они сохраняют евклидовунорму вихря только в пределе при t → 0 (это следствие пренебрежения нелиней-ными членами при выводе формул (14)). Переходя к пределу в (16) при t → 0,получим:
w = [c, w]. (17)
Это уравнение нужно решать совместно с (15). Теперь w зависит от времени,и уравнения (15), (17) нелинейны. Зато уравнения (17) имеют первый интеграл(w,w), то есть, евклидова норма вихря сохраняется.
Еще одно интересное свойство системы (15), (17) связано с решениями ви-да (11). Хотя система (15), (17) не имеет равновесий, но начальным данным c = 0,w = ei отвечают решения
c = −Dei · t, w = ei,
то есть, производящая функция линейно зависит от t, а вихрь сохраняется.
Автор благодарит М.Ю. Жукова за постановку задачи и А.Б. Моргулиса заполезные обсуждения. Работа выполнена в рамках европейского научного объ-единения “Регулярная и хаотическая гидродинамика” (грант РФФИ 07-01-92-213-НЦНИЛ), а также гранта Президента РФ поддержки ведущей научной школы РФНШ-5747.2006.1, гранта РФФИ (07-01-00389а) и гранта АФГИР (CRDF) RUM1-2842-RO-06.
Список литературы[1] Юдович В.И. Косимметрия и консервативные системы II. Ростов-на-Дону, 2000.
Деп. в ВИНИТИ 06.09.00, 2772-В00. 24 с.
[2] Yudovich V.I. Topics in an Ideal Fluid Dynamics // Journal of Mathematical FluidMechanics. 2005. Vol. 7, Suppl. 3. P. S299–S325.
[3] Курант Р. Уравнения с частными производными. М.: Мир, 1964. 830 с.
Petrovskaya N.V. Low-order models for 2D vortical flows of inviscid incompressiblefluid . We use a combination of the Galerkin and asymptotic techniques to study the Routh-like equations of inviscid incompressible fluid dynamics in two dimensions. We derive andexamine two simple models which describe some vortical flows confined within a rectangle.

ЧИСЛЕННОЕ И АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕНАЧАЛЬНО-КРАЕВОЙ ЗАДАЧИ С ПОДВИЖНОЙ ГРАНИЦЕЙ
Пинчук Н.А., Столяр А.М.Южный федеральный университет, Ростов-на-Дону
В работе рассматриваются начально-краевые задачи математической физики с по-движной границей, описывающие продольные и продольно-поперечные колебания тросапеременной длины с грузом на конце. Проводится сравнение результатов аналитическогои численного решений.
Постановка задачи. Продольно-поперечные колебания троса, который раз-матывается с катушки, и висящего на нем груза, можно описать следующей си-стемой уравнений [1, 2]:
∂2U
∂t2= a2∂2U
∂x2+ g, U = ξ(t)− x− u(x, t), a2 =
E
ρ, (1)
∂2w
∂t2=
∂N
∂x+ q(x, t), (2)
∂2U
∂t2
∣∣∣∣x=0
=EF
m
(∂U
∂x
∣∣∣∣x=0
+1
)+ g; w
∣∣x=0
= f1(t), (3)
U∣∣x=`(t)
= 0, w∣∣x=`(t)
= f2(t), (4)
U∣∣t=0
= Φ1(x),∂U
∂t
∣∣∣∣t=0
= Φ2(x), w∣∣t=0
=∂w
∂t
∣∣∣∣t=0
= 0, (5)
`(t)∣∣t=0
= `0,d`
dt
[1 +
∂u
∂`(`, t)
]= εψ(t), (6)
Φ1(x) = `0 + ϕ1(`0)− x− ϕ1(x), Φ2(x) = −ϕ2(x).
Здесь u(x, t) и w(x, t) — продольное и поперечное смещения сечения x троса вмомент времени t; ρ, F , E — плотность, площадь поперечного сечения и модульЮнга троса; `(t) — его длина в момент времени t в недеформированном состоянии;ξ(t) — фактическое расстояние от точки схода троса с катушки до груза; функ-ции ϕ1(x) и ϕ2(x) — начальные значения продольного смещения и его скорости;εψ(t) — скорость разматывания троса. Примем, что скорость разматывания тро-са мала по сравнению со скоростью распространения волны в тросе V0 =
√E/ρ.
Малый параметр ε введем по формуле ε = V∗/V0, где V∗ — максимальная ско-рость возрастания длины троса. Кроме того, в (6) пренебрежем величиной ∂u/∂xпо сравнению с 1 (как показывают расчеты, при этом результаты отличаются нанесколько процентов для относительно невысокой скорости разматывания троса).
Асимптотическое интегрирование.Функцию U в (1)–(6) представим в виде
U(x, t) = v(x, t) + W (x, `(t)), (7)

162 Пинчук Н.А., Столяр А.М.
W (x, `(t)) =1
2
ρg
E
[`2(t)− x2
]−( mg
EF+ 1
) [`(t)− x
].
Подставляя (7) в (1), (3)–(5), с учетом (6) получим задачу для определения функ-ции v(x, t):
∂2v
∂t2+ F1(t)ε + F2(t)ε
2 = a2 ∂2v
∂x2, (8)
∂2v
∂t2
∣∣∣∣x=0
+ F1(t)ε + F2(t)ε2 =
EF
m
∂v
∂x
∣∣∣∣x=0
, (9)
v∣∣t=0
= Φ11(x),∂v
∂t
∣∣∣∣t=0
= Φ22(x), (10)
F1(t) =(ρg
E`0 +
mg
EF+ 1
) dψ
dt, F2(t) =
ρg
E
[ψ2(t) + `1(t)
∂ψ
∂t
], (11)
`1(t) =
t∫
0
ψ(τ) dτ, Φ11(x) = Φ1(x)−W (x, `0),
Φ22(x) = Φ2(x)−(
ρg`0
E+
mg
EF+ 1
)ψ(0)ε.
Уравнение (2) остается без изменений. Граничные условия (4) преобразуются сле-дующим образом. Применяя (6), имеем
`(t) = `0 + `1(t)ε. (12)
Учитывая то, что ε — малый параметр, каждое из равенств (4) разложим в рядТейлора в окрестности точки x = `0. В результате, из (4) находим
v∣∣x=`0
+∂v
∂x
∣∣∣∣x=`0
· `1(t)ε + . . . = 0, (13)
w∣∣x=`0
+∂w
∂x
∣∣∣∣x=`0
· `1(t)ε + . . . = f2(t). (14)
Задача (2), (8)–(14) содержит малый параметр ε в уравнениях и граничныхусловиях. Построим ее решение в виде рядов по степеням ε:
v =∞∑i=0
vi(x, t)εi, w =∞∑i=0
wi(x, t)εi. (15)
Подставляя (15) в (2), (8)–(14) и приравнивая коэффициенты при одинаковыхстепенях ε, получаем начально-краевые задачи, которым удовлетворяют функцииvi(x, t) и wi(x, t); при этом независимая переменная x принадлежит уже посто-янному отрезку интегрирования [0; `0]. Так, например, для определения функцийvi(x, t) имеем
∂2v0
∂t2= a2∂2v0
∂x2,
∂2v0
∂t2
∣∣∣∣x=0
=EF
m
∂v0
∂x
∣∣∣∣x=0
, v0
∣∣x=`0
= 0, (16)

Численное и асимптотическое интегрирование начально-краевой задачи 163
v0
∣∣t=0
= Φ11(x),∂v0
∂t
∣∣∣∣t=0
= Φ2(x).
∂2v1
∂t2+ F1(t) = a2∂2v1
∂x2,
∂2v1
∂t2
∣∣∣∣x=0
+ F1(t) =EF
m
∂v1
∂x
∣∣∣∣x=0
, (17)
v1
∣∣x=`0
= − ∂v0
∂x
∣∣∣∣x=`0
· `1(t), v1
∣∣t=0
= 0,∂v1
∂t
∣∣∣∣t=0
= −(
ρg`0
E+
mg
EF+ 1
)ψ(0).
∂2v2
∂t2+ F2(t) = a2∂2v2
∂x2,
∂2v2
∂x2
∣∣∣∣x=0
+ F2(t) =EF
m
∂v2
∂x
∣∣∣∣x=0
, (18)
v2
∣∣x=`0
= −`1(t)∂v1
∂x
∣∣∣∣x=`0
− 1
2`21(t)
∂2v0
∂x2
∣∣∣∣x=`0
, v2
∣∣t=0
=∂v2
∂t
∣∣∣∣t=0
= 0
и т. д.Таким образом, решение задачи математической физики с подвижной границей
сводится к решению последовательности задач на постоянном отрезке [0; `0].
Численное интегрирование. Численно задача (1)–(6) исследовалась при по-мощи алгоритмов, основанных на методах Рунге–Кутта и конечных разностей [3](мы называем эти алгоритмы РК–П и МКР–П, т. е. методы Рунге–Кутта и конеч-ных разностей соответственно для задач с подвижной границей). Для проверкиэффективности асимптотики проведено сравнение результатов численного инте-грирования исходной задачи (1)–(6) с результатами асимптотического интегриро-вания (с использованием рядов (15)). Расчет проводился для следующих значенийпараметров
F = 4,41 · 10−6π м2, E = 1011 Н/м3, ρ = 5197 кг/м3, `0 = 50м, (19)
ϕ1(x) =g
E
(ρ
2x2 +
m
Fx)
, ϕ2(x) = 0,d`
dt= Kt. (20)
В работах [2]–[4] при расчете продольных колебаний и в работе [3] при расчетеколебаний продольно-поперечных показано, что как РК–П, так и МКР–П даютвесьма близкие результаты на большом отрезке времени. При этом расчеты про-водились для различных наборов начальных условий, а не только для функцийϕ1(x) и ϕ2(x), заданных в (19). На рис. 1 и 2 приводятся графики зависимости отвремени функции u(`(t), t) — удлинения троса в точке его схода с колеса. Номе-ром 1 отмечена кривая, полученная численным интегрированием методом РК–П,а номерами 2 и 3 — асимптотические кривые, отвечающие учету одного и двухчленов разложения соответственно. Рис. 1 получен для K = 2 (что соответству-ет ε ≈ 0,001), а рис. 2 — K = 20 (ε ≈ 0,01). Как мы видим, на рис. 1 все трикривые практически совпадают. На рис. 2 кривые с течением времени начинаютразличаться. Это связано с тем, что при высокой скорости разматывания (а па-раметр K в (20) отвечает ускорению, с которым трос сматывается с колеса) тросстремится сжаться в продольном направлении, что физически нереализуемо и при-водит к участкам (свободного) провисания троса, каковое его поведение уже неописывается уравнениями (1)–(6).
Проведенные расчеты показывают, что с уменьшением параметра ε асимпто-тические и численные результаты сближаются.
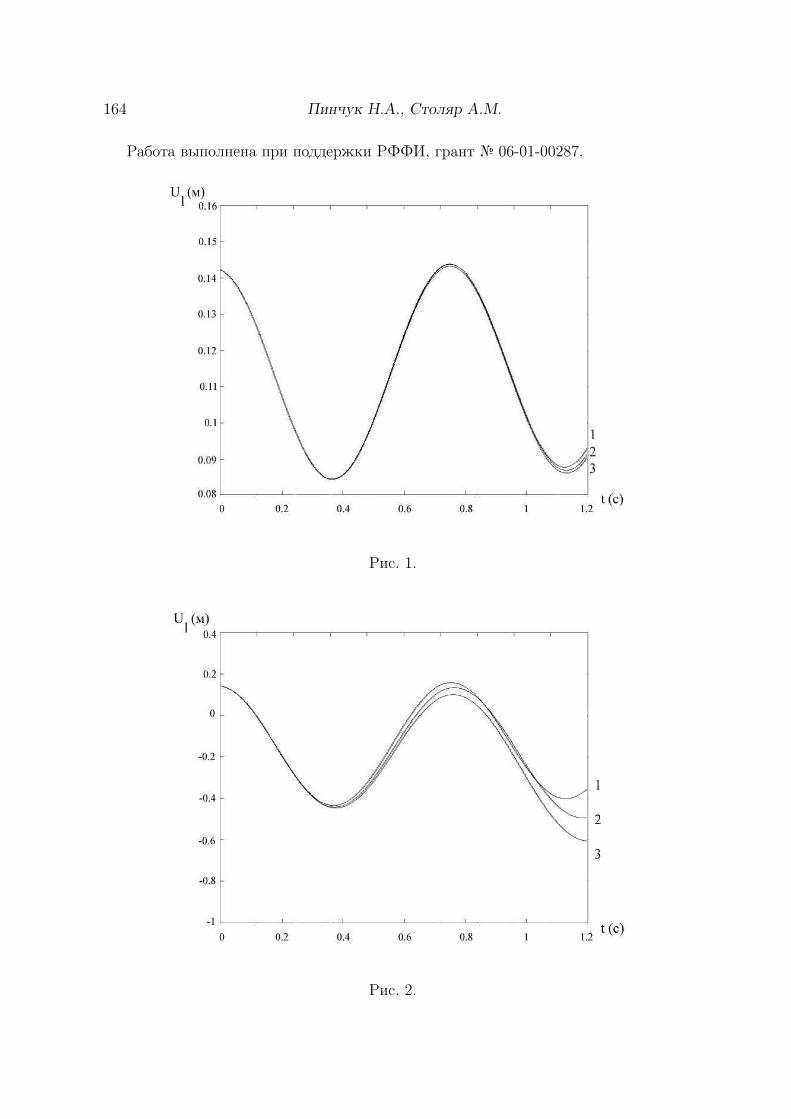
164 Пинчук Н.А., Столяр А.М.
Работа выполнена при поддержки РФФИ, грант 06-01-00287.
Рис. 1.
Рис. 2.
Численное и асимптотическое интегрирование начально-краевой задачи 165
Список литературы[1] Горошко О.А., Савин Г.М. Введение в механику деформируемых одномерных тел
переменной длины. М.: Наукова думка, 1971. 224 с.
[2] Кегеджиян Л.О., Пинчук Н.А., Столяр А.М. Об одной задаче математическойфизики с подвижной границей // Известия вузов. Сев.-Кавк. регион. Естественныенауки. 2008. 2. (в печати).
[3] Пинчук Н.А., Столяр А.М. Расчет продольно-поперечных колебаний троса пере-менной длины // Тр. X международной конференции “Современные проблемы ме-ханики сплошной среды”. Ростов-на-Дону, 5–9 декабря 2006. Ростов н/Д: Изд-воООО “ЦВВР”. Т. 1. С. 217–221.
[4] Бермус И.М., Бернштейн Л.А., Прошкин С. Г. и др. Продольные колебания гру-за на канате переменной длины // Доклады расширенных заседаний семинара поприкладной математике им. И.Н. Векуа. Тбилиси, 1989. Т. 4. 3. С. 29–32.
Pinchuk N.A., Stolyar A.M. Numerical and asymptotic integration of initial boundary-value problem with a moving boundary. Longitudinal and longitudinal-transverse oscillationsof the cable of variable length are considered in the paper by numerical and asymptoticmethods. The results of the investigations are compared.

РАВНОВЕСНАЯ ПЛОСКАЯ СИММЕТРИЧНАЯ ТРЕЩИНА ВНЕОГРАНИЧЕННОЙ УПРУГОЙ СРЕДЕ
Рашидова Е.В.∗, Сметанин Б.И.∗∗, Соболь Б.В.∗∗ Донской государственный технический университет, Ростов-на-Дону
∗∗ Южный федеральный университет, Ростов-на-Дону
Задача о плоской трещине нормального разрыва в упругом пространстве сведенак решению интегро-дифференциального уравнения, не содержащего оператора Лапла-са [1]. Это уравнение позволило получить приближенное решение задачи в форме дву-кратного интеграла по области Ω, занятой трещиной. При этом считается, что область Ωимеет две взаимно-ортогональные оси симметрии, а ограничивающий эту область кон-тур L является достаточно гладким. Для уточнения полученного решения построен ре-куррентный процесс, аналогичный предложенному в [2]. Результаты вычислений свиде-тельствуют о его сходимости.
Рассмотрим интегро-дифференциальное уравнение задачи о плоской трещиненормального разрыва в упругом пространстве в виде
∂2
∂x∂y
∫
Ω
∫γ(ξ, η)
√(ξ − x)2 + (η − y)2
(ξ − x)(η − y)dξdη = 2π
ρ
θ, (x, y) ∈ Ω. (1)
Здесь γ(x, y) — амплитуда раскрытия трещины; ρ = const — интенсивностьнормальной нагрузки, приложенной к берегам трещины; θ = E[2(1 − ν2)]−1, E —модуль Юнга, ν — коэффициент Пуассона. Функция γ(x, y) удовлетворяет очевид-ному условию
γ(x, y)|L = 0 (2)
Непосредственное интегрирование уравнения (1) и учет симметрии задачи при-водит его к виду
∫
Ω
∫γ(ξ, η)
√(ξ − x)2 + (η − y)2
(ξ − x)(η − y)dξdη = 2π
ρ
θxy. (3)
Если кривизна контура L, рассматриваемая как функция дуги S, принадлежитHα
1 (L), α > 0, то решение уравнения (3) имеет вид [1]
γ(x, y) =ρa
θ
√`(x, y)ω(x, y) (4)
где `(x, y) = 0 — уравнение контура L, ограничивающего область трещины Ω, a —постоянная, имеющая размерность длины.
При сделанных предположениях относительно области Ω функция γ(x, y) яв-ляется четной функцией по обеим переменным. С учетом этого, преобразуем урав-нение (3) к виду

Равновесная плоская симметричная трещина в неограниченной упругой среде 167
∫
Ω
∫γ(ξ, η)H(ξ, η, x, y)dξdη = 2π
ρ
θxy. (5)
H(ξ, η, x, y) = 14(R−−Q−− −R+−Q+− −R−+Q−+ + R++Q++)
R±± =√
(ξ ± x)2 + (η ± y)2; Q++ = (ξ ± x)−1(η ± y)−1(6)
Можно показать, что H(ξ, η, x, y) является четной функцией по ξ и η и нечет-ной — по x и y.
Итерационный процесс определения последовательных приближений функцииω(x, y) строится по следующей схеме
ωn+1(x, y) = ω0(x, y)×
×1− a
2πxy
∫
Ω
∫ √`(ξ, η)H(ξ, η, x, y)[ωn(ξ, η)− ωn(ξ, y)] dξdη −
− a
2πxy
∫
Ω
∫ √`(ξ, η)H(ξ, η, x, y)[ωn(ξ, y)− ωn(x, y)] dξdη (n = 0, 1, 2, . . .)
(7)
ω0(x, y) = 2πxy
a
∫
Ω
∫ √`(ξ, η)H(ξ, η, x, y)dξdη
−1
(8)
Из предположения о том, что ω(x, y) принадлежит условию Гельдера по обеимпеременным, можно сделать вывод, что выделение в (7) разностных множителей(в отличие от [2]) позволяет устранить сингулярную особенность по одной из пе-ременных. Это приводит к повышению эффективности вычисленного процесса посхеме (7).
На осях симметрии функция ω0(x, y) принимает вид
ω0(x, 0) = 4πx
a
∫
Ω
∫ √`(ξ, η)
η2[
ξ − x√(ξ − x)2 + η2
− ξ + x√(ξ + x)2 + η2
]dξdη
−1
(9)
ω0(0, y) = 4πy
a
∫
Ω
∫ √`(ξ, η)
ξ2[
η − y√(η − y)2 + ξ2
− η + y√(η + y)2 + ξ2
]dξdη
−1
(10)
Из (9) легко найти
ω0(0, 0) = −2π
a
∫
Ω
∫ √`(ξ, η)
(ξ2 + η2)3/2dξdη
−1
(11)

168 Рашидова Е.В., Сметанин Б.И., Соболь Б.В.
Интегралы в (9)–(11) могут быть вычислены с использованием формулы Ада-мара. При получении (9)–(10) использовалось представление функции H(ξ, η, x, y)в следующем виде, вытекающем из (6):
H(ξ, η, x, y) =ξx
ξ2 − x2×
×[
η − y
(ξ + x)R−− + (ξ − x)R+−− η + y
(ξ + x)R−+ + (ξ − x)R++
](12)
Вычисления по формулам (7)–(12) были проведены для
`(x, y) = 1− x2n
a2n− y2m
b2m
Для повышения эффективности вычисления интеграла (8) учитывалось зна-чение интеграла, соответствующего круговой области Ω0:x2 + y2 ≤ a2; `0(x, y) = 1− x2a−2 − y2a−2
∫
Ω0
∫ √`0(ξ, η)H(ξ, η, x, y)dξdη =
2πxy
a, (x, y) ∈ Ω0
Вычисление функций ωn(x, y) (n ≥ 1) осуществлялось по следующей методи-ке. Рассчитывались значения функций ω
(n)ij = ωn(xi, yj) в узлах равномерной сетки
0 ≤ x′i, tj ≤ 1 (x′ = x/a), после чего функция ωn(x, y) в интегралах (7) заменяласьинтерполяционным многочленом Лагранжа
L(x, t) =m∑
i=0
m∑j=0
ω(n)ij
m∏k=0k 6=i
m∏q=0q 6=j
(|x| − xk)(|t| − tq)
(xi − xk)(tj − tq), t =
y4√
a2 − x2
Данные, приведенные в таблице 1, позволяют проследить сходимость итераци-онного процесса (7) в узлах сетки.
n ωn(0, 0) ωn(0, a) ωn(0.5a,4√
0.75a) ωn(a, 0)0 0.748 0.735 0.572 0.7491 0.746 0.645 0.501 0.6982 0.745 0.637 0.563 0.7133 0.745 0.617 0.547 0.6804 0.746 0.637 0.557 0.6905 0.746 0.622 0.551 0.684
Таблица 1.
Анализ полученных результатов показал, что максимальное значение коэф-фициента интенсивности нормальных напряжений достигается в точках контуратрещины x = ±a, y = 0, в которых KI = 1.213ρ
√a. Для сравнения отметим, что в
точках контура круглой трещины радиуса a KI = 2p√
a/π ≈ 1.128ρ√
a.

Равновесная плоская симметричная трещина в неограниченной упругой среде 169
Список литературы[1] Александров В.М., Сметанин Б.И., Соболь Б.В. Тонкие концентраторы напряже-
ний в упругих телах. М.: Физмалит, 1993. 224 с.
[2] Сметанин Б.И., Соболь Б.В. Равновесие упругого слоя, ослабленного плоскимитрещинами //ПММ. 1984. Т. 48. Вып. 6. C. 1030–1038.
Rashidova E.V., Smetanin B.I., Sobol B.V. Equilibrium flat symmetrical crack inthe unlimited elastic environment . Flat crack’s problem of normal rupture in the elastic spaceis shown equivalent the decision of Integra-differential equation which doesn’t contain Laplasoperator [1]. This equation allows to get approximate decision of the problem as a doubleintegral in Ω area occupied by crack. We assume that the area Ω has two mutual-orthogonalaxes of symmetry, and area’s boundary L is smooth enough. The recurrent process has beenbuilt to specify decision finally obtained. Results of calculations testify that recurrent processconverges.

ТЕРМОВЯЗКОУПРУГИЕ ЗАДАЧИ СТАЦИОНАРНОЙДИНАМИКИ ОБОЛОЧЕК ВРАЩЕНИЯ ИЗ ПОЛИМЕРНОГО
КОМПОЗИТА
Сафроненко В. Г., Трифонов В.В.∗, Шутько В.М.∗∗∗ НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону∗∗ Южный федеральный университет, Ростов-на-Дону
Численно исследовано влияние температурных полей на вибродинамические харак-теристики цилиндрической оболочки из волокнистого полимерного композита.
При исследовании виброактивности оболочек из полимерных композитных ма-териалов важное значение имеет адекватное описание термовязкоупругих свойствполимера. Это связано с тем, что способность оболочки к демпфированию коле-баний, во многом, определяется физико-механическими свойствами полимерногосвязующего. Существенно и то, что эти характеристики являются нелинейнымифункциями частоты и температуры. Рассмотрим вынужденные колебания жест-ко защемленной цилиндрической оболочки, выполненной из полимерного волок-нистого композита, в однородном температурном поле. Уравнения гармоническихколебаний оболочки вращения, соответствующие теории типа Тимошенко в обще-принятых обозначениях имеет вид [1]:
T ′11 + ψ(T11 − T22) + S• + k1Q11 + ω2(bu + cφ1) + p1 = 0;
S ′ + 2ψS + T •22 + k2Q22 + ω2(bv + cφ2) + p2 = 0;
Q′11 + ψQ11 + Q•
22 − k1T11 − k2T22 + ω2bw + p3 = 0; (1)
M ′11 + ψ(M11 −M22) + H• −Q11 + ω2(cu + dφ1) = 0;
H ′ + 2ψH + M•22 −Q22 + ω2(cv + dφ2) = 0;
где u, φ1, v, φ2, w, E11, E22, E12, K11, K22, K12, T11, T22, S,M11,M22, H — комплексныеамплитуды соответствующих величин, ω — круговая частота.
Физические уравнения состояния, связывающие усилия и моменты с деформа-циями имеют вид:
T11 = B11E11 + B12E22 + A11K11 + A12K22 + 2L16E12 + 2N16K12;
.....................
M11 = A11E11 + A12E22 + D11K11 + D12K22 + 2N16E12 + 2R16K12; (2)
.....................
Q11 = J13E13 + J45E23.
Жесткостные коэффициенты в выражениях (2) определяются через эффек-тивные физико-механические характеристики волокнистого композита [2].

Термовязкоупругие задачи стационарной динамики оболочек вращения 171
Для численного исследования используется метод разложения в ряды Фурье скомплексными коэффициентами (3) с последующим применением метода ортого-нальной прогонки:
X(α1, α2) =N∑
n=0
(X+n(α1) cos(nα2) + X−n(α1) sin(nα2)). (3)
В качестве модели полимерного материала примем следующие зависимостидля комплексной податливости [3]:
I ′(ω, T ) =
∫ r2
r1
C(r)
G(r, υ, T )
[1−H(r)
ω2
ϕ(r, υ, T )2 + ω2
]dr;
I”(ω, T ) =
∫ r2
r1
C(r)H(r)
G(r, υ, T )
ϕ(r, υ, T )ω
ϕ(r, υ, T )2 + ω2dr. (4)
Условия нагружения, геометрические параметры оболочки, а также механи-ческие свойства полимера и волокна аналогичны представленным в работе [4].Рассчитанные по (4) комплексный модуль и тангенс угла потерь представлены нарис. 1.
Рис. 1. Реальная часть E∗m и тангенс угла потерь в зависимости от частоты.
Т=250К (точечный), Т=290К (сплошной), Т=330К (пунктирный)
На рис. 2 представлены амплитудно-частотные характеристики (АЧХ), рас-считанные в однородном стационарном температурном поле, и соответствующиечастотные зависимости коэффициента поглощения энергии. Из приведенных рас-четов следует, что для данного полимерного материала с повышением темпера-туры наблюдается снижение уровня вибраций и смещение резонансных частот внизкочастотную область. Это связано с существенным ростом внутренних потерьв полимере при увеличении температуры.
Далее рассмотрим случай неоднородности свойств оболочки, связанный с на-личием градиента температуры по толщине оболочки. Предположим, что темпера-тура внешней окружающей среды равна T−, а температура внутри оболочки — T+.Примем, что температура стенки оболочки изменяется по толщине по линейномузакону T (Z): T (S−) = T−; T (S+) = T+.
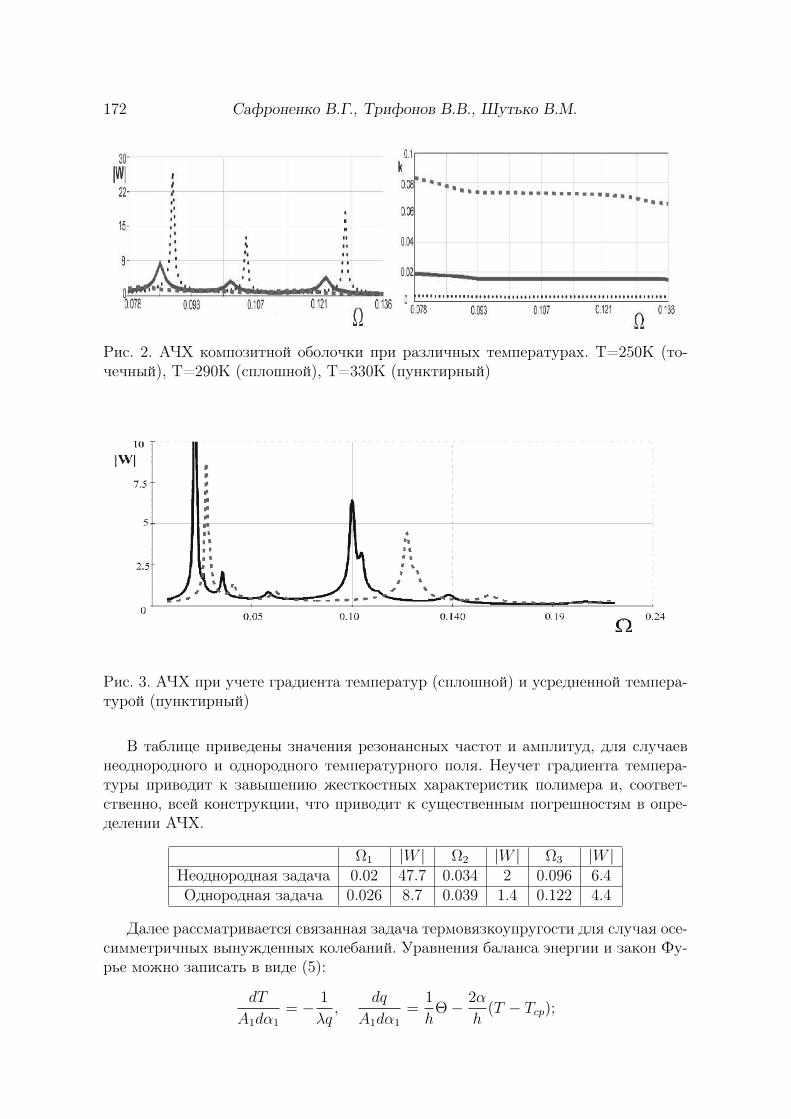
172 Сафроненко В.Г., Трифонов В.В., Шутько В.М.
Рис. 2. АЧХ композитной оболочки при различных температурах. Т=250К (то-чечный), Т=290К (сплошной), Т=330К (пунктирный)
Рис. 3. АЧХ при учете градиента температур (сплошной) и усредненной темпера-турой (пунктирный)
В таблице приведены значения резонансных частот и амплитуд, для случаевнеоднородного и однородного температурного поля. Неучет градиента темпера-туры приводит к завышению жесткостных характеристик полимера и, соответ-ственно, всей конструкции, что приводит к существенным погрешностям в опре-делении АЧХ.
Ω1 |W | Ω2 |W | Ω3 |W |Неоднородная задача 0.02 47.7 0.034 2 0.096 6.4Однородная задача 0.026 8.7 0.039 1.4 0.122 4.4
Далее рассматривается связанная задача термовязкоупругости для случая осе-симметричных вынужденных колебаний. Уравнения баланса энергии и закон Фу-рье можно записать в виде (5):
dT
A1dα1
= − 1
λq,
dq
A1dα1
=1
hΘ− 2α
h(T − Tcp);
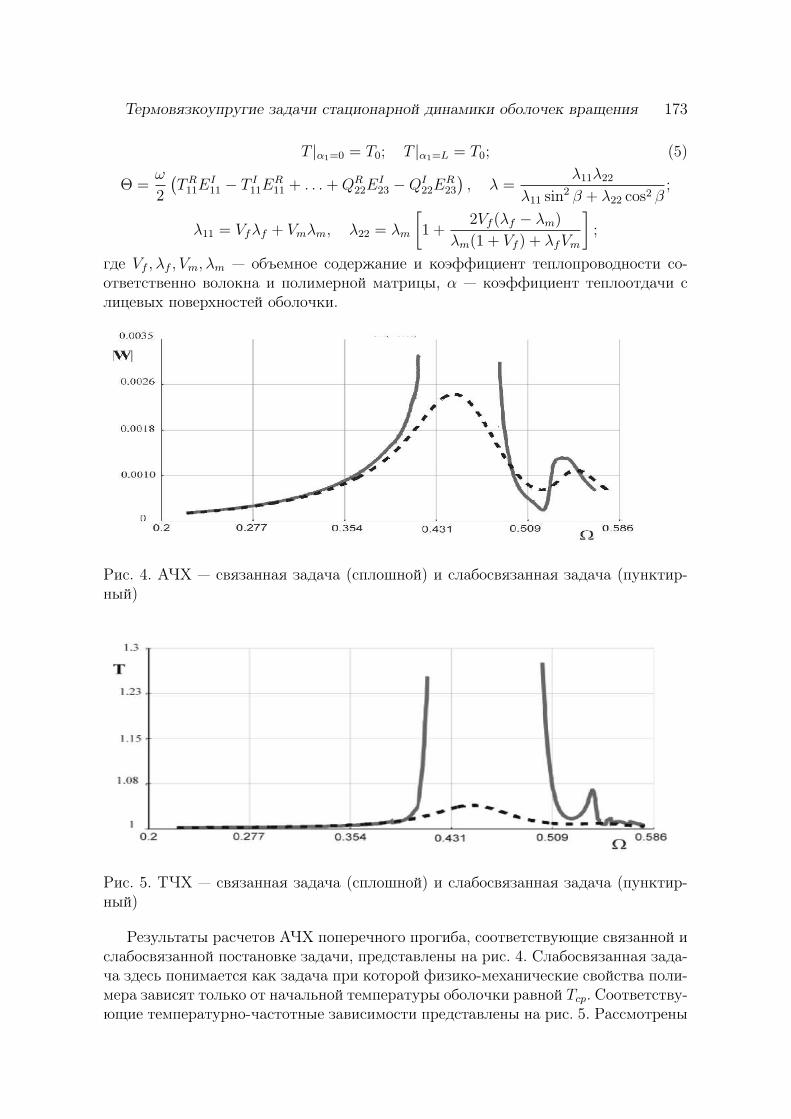
Термовязкоупругие задачи стационарной динамики оболочек вращения 173
T |α1=0 = T0; T |α1=L = T0; (5)
Θ =ω
2
(TR
11EI11 − T I
11ER11 + . . . + QR
22EI23 −QI
22ER23
), λ =
λ11λ22
λ11 sin2 β + λ22 cos2 β;
λ11 = Vfλf + Vmλm, λ22 = λm
[1 +
2Vf (λf − λm)
λm(1 + Vf ) + λfVm
];
где Vf , λf , Vm, λm — объемное содержание и коэффициент теплопроводности со-ответственно волокна и полимерной матрицы, α — коэффициент теплоотдачи слицевых поверхностей оболочки.
Рис. 4. АЧХ — связанная задача (сплошной) и слабосвязанная задача (пунктир-ный)
Рис. 5. ТЧХ — связанная задача (сплошной) и слабосвязанная задача (пунктир-ный)
Результаты расчетов АЧХ поперечного прогиба, соответствующие связанной ислабосвязанной постановке задачи, представлены на рис. 4. Слабосвязанная зада-ча здесь понимается как задача при которой физико-механические свойства поли-мера зависят только от начальной температуры оболочки равной Tcp. Соответству-ющие температурно-частотные зависимости представлены на рис. 5. Рассмотрены

174 Сафроненко В.Г., Трифонов В.В., Шутько В.М.
частотные диапазоны, включающие первые резонансы. В этом частотном диапа-зоне нарушается сходимость решения, и накопление критической ошибки дости-гается на первых итерациях. При решении слабосвязанной задачи стационарныеколебательные и температурные режимы существуют при всех взятых значени-ях частотного параметра. Проведенные расчеты указывают на существенное рас-хождение амплитуд и температуры теплообразования в окрестностях резонанс-ных частот. При этом, решение задачи, не учитывающей влияние температурына свойства полимера, дает существенно заниженные значения как при расчетеамплитудно-частотных, так и температурно-частотных характеристик. Вне резо-нансных областей решения обеих задач достаточно близки.
Список литературы[1] Григолюк Э.И., Куликов Г.М. Многослойные армированные оболочки. Москва: Ма-
шиностроение, 1988. С. 79–90.
[2] Кристенсен Р. Введение в механику композитов. Москва: Мир, 1982. 334 с.
[3] Степаненко Ю.П., Исаева К.В., Азаров А.Д. Моделирование термомеханическогоповедения полимерных материалов // Современные проблемы механики сплошнойсреды. Тр. II Международной конференции г. Ростов-на-Дону, 19–20 сентября 1996 г.Ростов-на-Дону: МП “Книга”, 1997. Т. 1. С. 118–123.
[4] Сафроненко В.Г., Трифонов В.В., Шутько В.М. О распределении диссипативнойэнергии по типам деформаций при гармонических колебаниях цилиндрической ком-позитной оболочки // Современные проблемы механики сплошной среды. Тр. XМеждународной конференции г. Ростов-на-Дону, 5–9 декабря 2006 г. Ростов-на-Дону: Изд-во ООО “ЦВВР”, 2006. Т. 1. С. 252–256.
Safronenko V.G., Trifonov V.V., Shutko V.M. Termoviscoelasticity problems ofstationary dynamics a polymeric composite shell of rotation. Influence of temperature fieldson vibrodynamic characteristics of cylindrical shells made of a fiber polymeric composite hasbeen numerically studied.
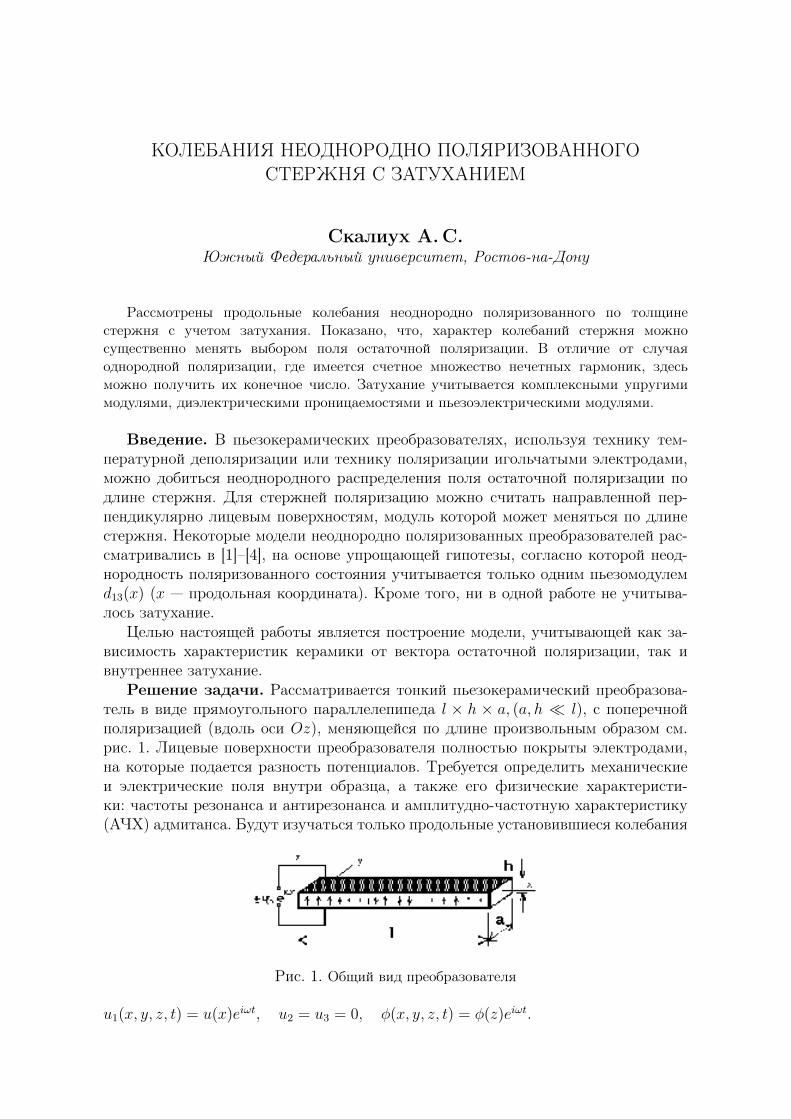
КОЛЕБАНИЯ НЕОДНОРОДНО ПОЛЯРИЗОВАННОГОСТЕРЖНЯ С ЗАТУХАНИЕМ
Скалиух А.С.Южный Федеральный университет, Ростов-на-Дону
Рассмотрены продольные колебания неоднородно поляризованного по толщинестержня с учетом затухания. Показано, что, характер колебаний стержня можносущественно менять выбором поля остаточной поляризации. В отличие от случаяоднородной поляризации, где имеется счетное множество нечетных гармоник, здесьможно получить их конечное число. Затухание учитывается комплексными упругимимодулями, диэлектрическими проницаемостями и пьезоэлектрическими модулями.
Введение. В пьезокерамических преобразователях, используя технику тем-пературной деполяризации или технику поляризации игольчатыми электродами,можно добиться неоднородного распределения поля остаточной поляризации подлине стержня. Для стержней поляризацию можно считать направленной пер-пендикулярно лицевым поверхностям, модуль которой может меняться по длинестержня. Некоторые модели неоднородно поляризованных преобразователей рас-сматривались в [1]–[4], на основе упрощающей гипотезы, согласно которой неод-нородность поляризованного состояния учитывается только одним пьезомодулемd13(x) (x — продольная координата). Кроме того, ни в одной работе не учитыва-лось затухание.
Целью настоящей работы является построение модели, учитывающей как за-висимость характеристик керамики от вектора остаточной поляризации, так ивнутреннее затухание.
Решение задачи. Рассматривается тонкий пьезокерамический преобразова-тель в виде прямоугольного параллелепипеда l × h × a, (a, h ¿ l), с поперечнойполяризацией (вдоль оси Oz), меняющейся по длине произвольным образом см.рис. 1. Лицевые поверхности преобразователя полностью покрыты электродами,на которые подается разность потенциалов. Требуется определить механическиеи электрические поля внутри образца, а также его физические характеристи-ки: частоты резонанса и антирезонанса и амплитудно-частотную характеристику(АЧХ) адмитанса. Будут изучаться только продольные установившиеся колебания
Рис. 1. Общий вид преобразователя
u1(x, y, z, t) = u(x)eiωt, u2 = u3 = 0, φ(x, y, z, t) = φ(z)eiωt.

176 Скалиух А.С.
Граничные условия выбираются так, что боковая поверхность свободна от ме-ханических нагрузок, и на концах действуют нормальные напряжения, а на лице-вых, электродированных поверхностях заданы потенциалы разных знаков
σ11(x, t) = peiωt, (x = 0, x = l), φ(z, t) = ±φ0eiωt, (z = ±h
2).
На неэлектродированных участках стержня задана нулевая нормальной составля-ющей индукции.
Воспользовавшись гипотезами плоского напряженного состояния, получим од-но уравнение движения и одно уравнение электростатики диэлектриков. Замыка-ют задачу определяющие соотношения, которые с учетом затухания можно запи-сать в виде:
ε11 = (η11 − iωα)σ11 + (d31 − iωβ)E3,D3 = (d31 − iωβ)σ11 + (ε33 − iωγ)E3,
где η11(p) =0η11 +fη(p(x))
1η11, d31(p) = fd(p(x))
1
d31, ε33(p) =0ε33 +fε(p(x))
1ε33 .
Функции, описывающие неоднородность физических констант по причине неод-нородной поляризации, представляют суперпозицию функций поляризации и ко-ординат, но в данной задаче могут рассматриваться как функции одной пере-менной x: fη(x), fd(x), fε(x). Определяющие соотношения для дальнейшего удобнопереписать в виде
σ11 = C(x, ω)ε11 − e(x, ω)E3, D3 = e(x, ω)ε11 + ε(x, ω)E3,
где
C(x, ω) =1
0η11 +fη(x)
1η11 −iωα
, e(x, ω) =fd(x)
1
d31 −iωβ0η11 +fη(x)
1η11 −iωα
,
ε(x, ω) =0ε33 +fε(x)
1ε33 − (fd(x)
1
d31 −iωβ)2
0η11 +fη(x)
1η11 −iωα
.
Здесь0η11 — упругая податливость и
0ε33 — диэлектрическая проницаемость непо-
ляризованной керамики;1η11=
∗η11 −
0η11,
1ε33=
∗ε33 − 0
ε33 и1
d31=∗d31. Величины со
звездочкой относятся к поляризованной до насыщения керамике.Функции fη(x), fd(x), fε(x) должны удовлетворять условию равенства нулю в
случае неполяризованного состояния и равенства единице в случае поляризациидо состояния насыщения. В остальном они могут быть произвольными. Для реше-ния задачи используем метод конечных элементов (КЭ). Пусть ξ — безразмернаякоордината и Ω — безразмерная частота:
ξ =x
lΩ = ωl
√ρ
C0
, C0 =1
0η11
Определим функцию u(ξ) ∈ W 12 (0, 1), удовлетворяющую интегральному равенству
∫ 1
0
C(ξ, Ω)
C0
du
dξ
dv
dξdξ − Ω2
∫ 1
0
uvdξ = p[v(1)− v(0)] +
∫ 1
0
e(ξ, Ω)
C0
2φ0
h
dv
dξdξ

Колебания неоднородно поляризованного стержня 177
при ∀v ∈ W 12 (0, 1).
Стандартная техника метода конечных элементов для N одинаковых одно-мерных трехузловых конечных элементов приводит к линейной алгебраическойсистеме уравнений (
C(Ω)− Ω2M) ·U = F
c вектором неизвестных узловых значений U , матрицей жесткости C(Ω), матри-цей масс M и вектором правых частей F .
Численная реализация и анализ решения. Одной из важнейших харак-теристик преобразователя является амплитудно-частотная характеристика адми-танса, которая представляет собой модуль проводимости образца Z, и которая пригармоническом возбуждении находится как
Z =iωa
hC0
∫ 1
0
D3dx.
Главное отличие данной модели от предыдущих заключается в том, что здесь по-лучающаяся матрица жесткости и столбец свободных членов при учете затуханиязависят от частоты.
Среди множества возможных случаев неоднородного распределения остаточ-ной поляризации выберем один частный случай — случай распределения поляри-зации по тригонометрическому закону, т.е. положим
fη(x) = fε(x) = fd(x) = cosπmx
l,
и рассмотрим последовательно случаи m = 1,m = 3, m = 5.
Рис. 2. m=1 Рис. 3. m=3 Рис. 4. m=5
Для численных экспериментов необходимо задать физические характеристикикерамики. Обратимся к ЦТС-19, для которой известны численные значения еехарактеристик как для неполяризованного, так и поляризованного до насыщениясостояния (система единиц измерения СИ):
0η11= 14.7059 · 10−12,
1η11= −2.4059 · 10−12(N/m2),
0ε33= 682.5ε0,
1ε33= −47.5ε0, ε0 = 8.85 · 10−12(F/m),
1
d31= −1.23 · 10−10(Kl/N)

178 Скалиух А.С.
Приведем АЧХ адмитанса без учета затухания и в том случае, когда затуханиеучитывается. Когда α = β = γ = 0, АЧХ адмитанса можно видеть на рис. 2–4. Иханализ показывает, что превалирующей является гармоника с тем номером, кото-рый описывает неоднородность поляризованного состояния и, кроме того, видно,что спектр частот резонансов и антирезонансов смещается в более низкую областьпо сравнению со случаем однородной поляризации.
Введем теперь затухание. Выбор коэффициентов демпфирования осуществимпо следующей схеме. Естественно считать, что коэффициенты затухания такжезависят от функции неоднородности поляризации, как и соответствующие модули,тогда
Рис. 5. m=1 Рис. 6. m=3 Рис. 7. m=5
η11(ξ, Ω) =0η11 +fη(ξ)
1η11 −iωαfη(ξ),
d31(ξ, Ω) = fd(x)1
d31 −iωβfd(x),
ε33(ξ, Ω) =0ε33 +fε(x)
1ε33 −iωγfε(x), ω = Ω
l
√C0
ρ.
Известно, что добротность и тангенсы углов потерь даются для поляризованнойдо насыщения керамики. Так механическая добротность определяется через дей-ствительную и мнимую части податливости следующей формулой
Q =Re(η11(ω))
|Im(η11(ω))| =η11
ωα.
Далее вводится в рассмотрение тангенс углов диэлектрических потерь
tgδ =|Im(ε33(ω))|Re(ε33(ω))
=ε33
ωγ
и тангенс Θ
tgΘ =|Im(d31(ω))|Re(d31(ω))
=d31
ωβ.
Угол Θ называется запаздыванием фазы деформации под приложенным электри-ческим полем или задержкой фазы электрической индукции под приложенным
Колебания неоднородно поляризованного стержня 179
механическим напряжением. Способы практического нахождения tgΘ можно най-ти в [6]. Отсюда находим
α =η11
ωQ, β =
tgΘd31
ω, γ =
tgδε33
ω.
Для вычислений принималось значение добротности на первой резонансной ча-стоте Q = 50, тангенс угла потерь tgδ = 0.025, и tgΘ = 0.05.
Результаты расчетов АЧХ с учетом неоднородности поляризации и затуханияпредставлены на рис. 5–7 для того же закона изменения неоднородной поляриза-ции, как и прежде.
Анализ результатов показывает, что в этом случае удается подавлять все гар-моники, кроме той, которая определяется функцией неоднородности. Спектр ре-зонансных частот сдвинут в нижнюю область.
Работа выполнена при поддержке РФФИ (грант 05-01-00752-а.)
Список литературы[1] Бородин В.З., Бондаренко Е.И., Ситало Е.И., Сиссе С.Д. Пространственно неод-
нородные пьезоструктуры в сегнетокерамике // Сб. научн. тр. Пьезоэлектрическиематериалы и преобразователи. Ростов-на-Дону. 1977. С. 167–172.
[2] Бородин В.З., Бондаренко Е.И., Ситало Е.И.Формирование спектра колебаний пла-стин // Сб. научн. тр. XI Всес. акустич. конф. Москва. 1991. С. 94–97.
[3] Клюшниченко В.А., Крамаров Ю.А. Синтез неравномерно-поляризованного пьезо-преобразователя // Сб. научн. тр. Акустические методы и средства исследованияокеана. Владивосток. 1974. С. 71–72.
[4] Скалиух А.С. Синтез неравномерно-поляризованного пьезопреобразователя //Межд. научн. конф. “Математика в индустрии”, тезисы докл., Таганрог. 1997. С. 167.
[5] Smits J.G. High accuracy determination of real and imaginary parts of elastic,piezoelectric and dielectric constants of ferroelectric PLZT (11/55/45) ceramics withiterative method // Ferroelectrrcs. 1985. Vol. 64. Pp. 274–291.
[6] Uchino K. Loss Mechanisms in Piezoelectrics: How to Measure Different LossesSeparately // IEEE Transaction on ultrasonics, ferroelectrics, and frequency control,2001. Vol. 48. Pp. 307–321.
Skaliukh A.S. Oscillations of bar with non-uniform polarization and attenuation. Thelongitudinal oscillations of bar with non-uniform polarization by length and with losses areconsidered. It is shown, that, the character of oscillations of a bar can be changed by a choiceof a field of residual polarization. Unlike the case of homogeneous polarization, where there isa set of odd harmonics, here it is possible to obtain their limited number. The losses is takeninto account complex elastic, dielectric and piezoelectric modules.

КОЛЕБАНИЯ ПОРИСТОГО СЛОЯ В УСЛОВИЯХ ПОЛНОГО ИЧАСТИЧНОГО ВОДОНАСЫЩЕНИЯ
Суворова Т.В., Столяров Ю.В.Ростовский государственный университет путей сообщения
Рассматривается смешанная задача о колебаниях водонасыщенного и газоводонасы-щенного гетерогенного пористоупругого слоя под действием осциллирующей нагрузки,приложенной к его поверхности. Исследовано влияние свойств среды на волновое поле,возбуждаемое в слое
Изучение возникновения и распространения упругих волн в пористых двух-компонентных средах, состоящих из упругого скелета и аэрированной жидкости,представляют большой интерес ввиду многочисленных приложений при исследо-вании геологических образований, измерении проницаемости грунтов, повышениепродуктивности нефтяных скважин, в биомеханической инженерии, при решенийзадач механики, моделирующих поведение грунтовых сред при динамических воз-действиях.
Волноводные свойства гетерогенных сред в значительной степени определяют-ся как граничными условиями краевых задач, так и объемными модулями сжи-маемости, сдвига, пористостью, степенью обводненности и газонасыщенности порсплошной среды, ее проницаемостью. В настоящей работе рассматривается плос-кая задача о колебаниях пористого гетерогенного слоя, состоящего из упругогоскелета, поры которого заполнены смесью жидкости и газа.
Пусть гетерогенный слой занимает область ∞ < x < ∞, и 0 ≤ y ≤ h.К верхней грани слоя в конечной области приложена осциллирующая нагрузкаP (x)e−iωt,−p1 ≤ x ≤ p2, y = h, вне области приложения поверхность слоя свобод-на от напряжений.
На нижней грани упругого слоя приложены заданные напряжения, кроме это-го, обе грани слоя непроницаемы. Перемещения двухфазной гетерогенной средыопределяются уравнениями Био [1].
ρ11∂2u
∂t2+ ρ12
∂2w
∂t2+ b
(∂u
∂t− ∂w
∂t
)= Gradσs
ij;
ρ12∂2u
∂t2+ ρ22
∂2w
∂t2+ b
(∂u
∂t− ∂w
∂t
)= Gradσf ; i = 1, 2
(1)
где u(x, y, t), w(x, y, t) — векторы перемещений твердой и жидкой фаз гетероген-ной среды.Связь между тензором полных напряжений и деформаций твердой и жидкой фазвыражается в виде:
σsij = Aeδij + 2Neij + Qεδij, σf = Qe + Rε,
e = divu, ε = divw, eij = (ui,j + uj,i) .(2)
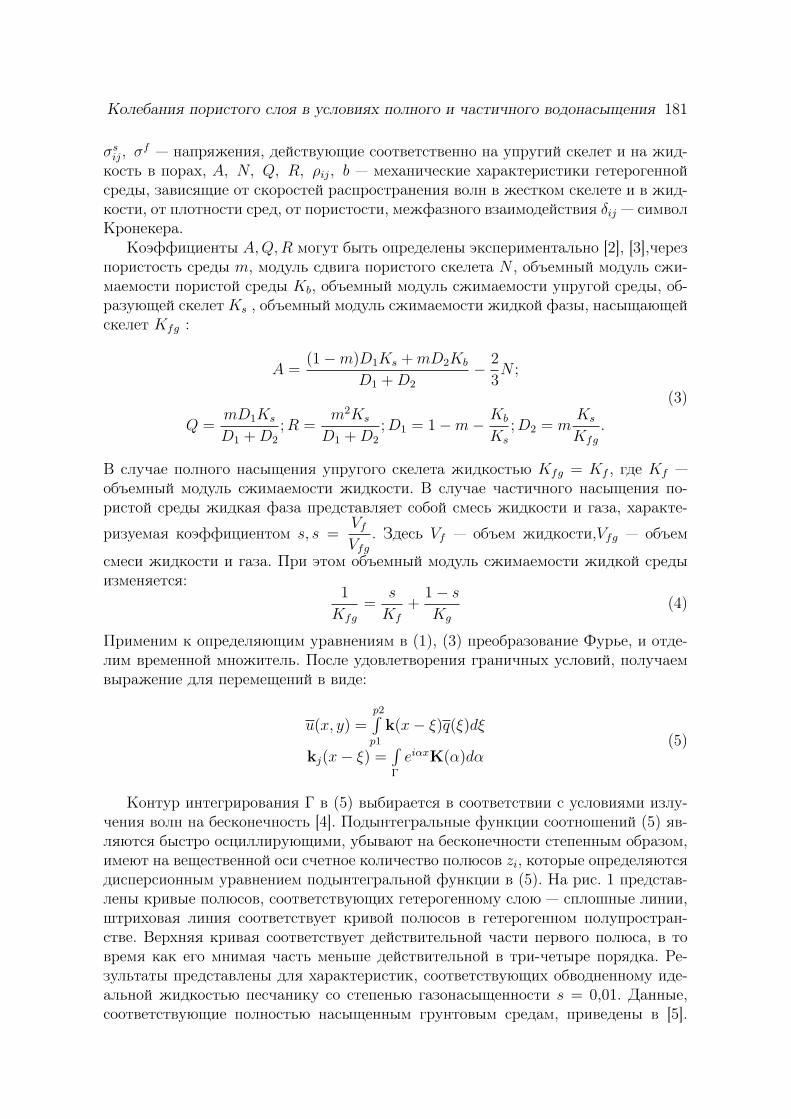
Колебания пористого слоя в условиях полного и частичного водонасыщения 181
σsij, σf — напряжения, действующие соответственно на упругий скелет и на жид-
кость в порах, A, N, Q, R, ρij, b — механические характеристики гетерогеннойсреды, зависящие от скоростей распространения волн в жестком скелете и в жид-кости, от плотности сред, от пористости, межфазного взаимодействия δij — символКронекера.
Коэффициенты A,Q, R могут быть определены экспериментально [2], [3],черезпористость среды m, модуль сдвига пористого скелета N , объемный модуль сжи-маемости пористой среды Kb, объемный модуль сжимаемости упругой среды, об-разующей скелет Ks , объемный модуль сжимаемости жидкой фазы, насыщающейскелет Kfg :
A =(1−m)D1Ks + mD2Kb
D1 + D2
− 2
3N ;
Q =mD1Ks
D1 + D2
; R =m2Ks
D1 + D2
; D1 = 1−m− Kb
Ks
; D2 = mKs
Kfg
.
(3)
В случае полного насыщения упругого скелета жидкостью Kfg = Kf , где Kf —объемный модуль сжимаемости жидкости. В случае частичного насыщения по-ристой среды жидкая фаза представляет собой смесь жидкости и газа, характе-
ризуемая коэффициентом s, s =Vf
Vfg
. Здесь Vf — объем жидкости,Vfg — объем
смеси жидкости и газа. При этом объемный модуль сжимаемости жидкой средыизменяется:
1
Kfg
=s
Kf
+1− s
Kg
(4)
Применим к определяющим уравнениям в (1), (3) преобразование Фурье, и отде-лим временной множитель. После удовлетворения граничных условий, получаемвыражение для перемещений в виде:
u(x, y) =p2∫p1
k(x− ξ)q(ξ)dξ
kj(x− ξ) =∫Γ
eiαxK(α)dα(5)
Контур интегрирования Γ в (5) выбирается в соответствии с условиями излу-чения волн на бесконечность [4]. Подынтегральные функции соотношений (5) яв-ляются быстро осциллирующими, убывают на бесконечности степенным образом,имеют на вещественной оси счетное количество полюсов zi, которые определяютсядисперсионным уравнением подынтегральной функции в (5). На рис. 1 представ-лены кривые полюсов, соответствующих гетерогенному слою — сплошные линии,штриховая линия соответствует кривой полюсов в гетерогенном полупростран-стве. Верхняя кривая соответствует действительной части первого полюса, в товремя как его мнимая часть меньше действительной в три-четыре порядка. Ре-зультаты представлены для характеристик, соответствующих обводненному иде-альной жидкостью песчанику со степенью газонасыщенности s = 0,01. Данные,соответствующие полностью насыщенным грунтовым средам, приведены в [5].
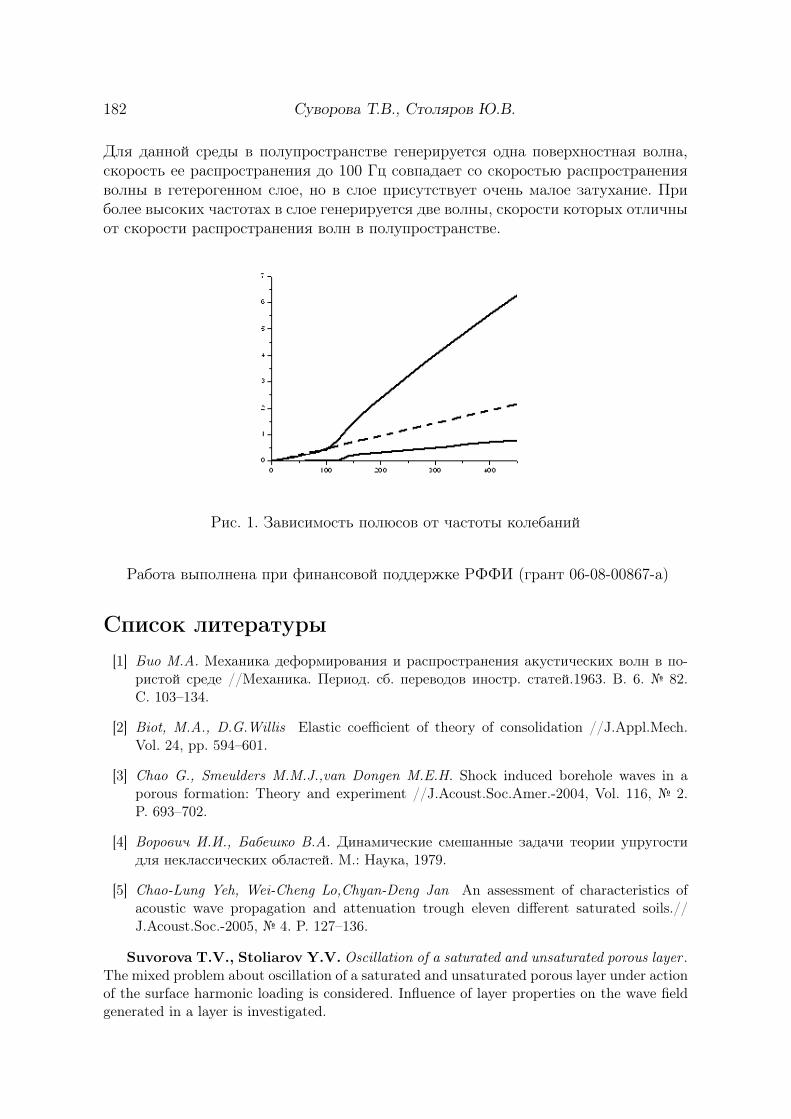
182 Суворова Т.В., Столяров Ю.В.
Для данной среды в полупространстве генерируется одна поверхностная волна,скорость ее распространения до 100 Гц совпадает со скоростью распространенияволны в гетерогенном слое, но в слое присутствует очень малое затухание. Приболее высоких частотах в слое генерируется две волны, скорости которых отличныот скорости распространения волн в полупространстве.
Рис. 1. Зависимость полюсов от частоты колебаний
Работа выполнена при финансовой поддержке РФФИ (грант 06-08-00867-a)
Список литературы[1] Био М.А. Механика деформирования и распространения акустических волн в по-
ристой среде //Механика. Период. сб. переводов иностр. статей.1963. В. 6. 82.С. 103–134.
[2] Biot, M.A., D.G.Willis Elastic coefficient of theory of consolidation //J.Appl.Mech.Vol. 24, pp. 594–601.
[3] Chao G., Smeulders M.M.J.,van Dongen M.E.H. Shock induced borehole waves in aporous formation: Theory and experiment //J.Acoust.Soc.Amer.-2004, Vol. 116, 2.P. 693–702.
[4] Ворович И.И., Бабешко В.А. Динамические смешанные задачи теории упругостидля неклассических областей. М.: Наука, 1979.
[5] Chao-Lung Yeh, Wei-Cheng Lo,Chyan-Deng Jan An assessment of characteristics ofacoustic wave propagation and attenuation trough eleven different saturated soils.//J.Acoust.Soc.-2005, 4. P. 127–136.
Suvorova T.V., Stoliarov Y.V. Oscillation of a saturated and unsaturated porous layer .The mixed problem about oscillation of a saturated and unsaturated porous layer under actionof the surface harmonic loading is considered. Influence of layer properties on the wave fieldgenerated in a layer is investigated.
ЧИСЛЕННО–АНАЛИТИЧЕСКОЕ ИССЛЕДОВАНИЕРАВНОВЕСИЯ НЕЛИНЕЙНО УПРУГОГО ЦИЛИНДРА,
СОДЕРЖАЩЕГО ИЗОЛИРОВАННЫЙ ДЕФЕКТ
Сухов Д. Ю.Южный федеральный университет, Ростов-на-Дону
В работе рассматриваются задача о равновесии упругого цилиндра при наличии внем клиновой дисклинации (для модели материала Блейтца и Ко общего вида) и задачао равновесии упругого цилиндра при наличии винтовой дислокации (для упрощенноймодели материала Блейтца и Ко). Для задачи о равновесии цилиндра при наличии дис-клинации проведен анализ зависимости относительного удлинения цилиндра от матери-альных параметров и величины вектора Франка; для задачи о равновесии цилиндра приналичии дислокации исследована зависимость внутреннего радиуса деформированногоцилиндра от вектора Бюргенса при большой толщине стенки. Получено подтверждениефакта о невозможности существования винтовой дислокации в сплошном цилиндре дляданной модели материала.
В работе рассматриваются результаты работы вычислительного комплекса, на-писанного на языках Maple и C++. С помощью стандартного оконного интерфейсапользователю предлагается выбрать параметры задачи о деформации нелинейноупругого тела –– вид упругого материала, комбинацию отсчетной и текущей си-стем координат, вид деформации, параметры для численных расчетов. После этогоMaple проводит аналитические преобразования, получая уравнение равновесия играничные условия, и далее численно решается задача исследования равновесияупругого тела. Для отработки метода были решены некоторые задачи, а именно,задача о равновесии упругого цилиндра при наличии в нем клиновой дисклина-ции (для модели материала Блейтца и Ко общего вида) и задача о равновесииупругого цилиндра при наличии винтовой дислокации (для упрощенной моделиматериала Блейтца и Ко).
Полуобратное представление для задачи о равновесии нелинейно упругого ци-линдра при наличии клиновой дисклинации имеет следующий вид:
R = P (r)Φ = κϕZ = λz
,
где λ – коэффициент относительного удлинения цилиндра, κ – длина вектораФранка клиновой дисклинации. Параметр κ задавался специальным образом, апараметр λ подбирался так, чтобы удовлетворить условию отсутствия осевой силы:
2π∫
0
r1∫
r0
DzZdrdϕ = 0
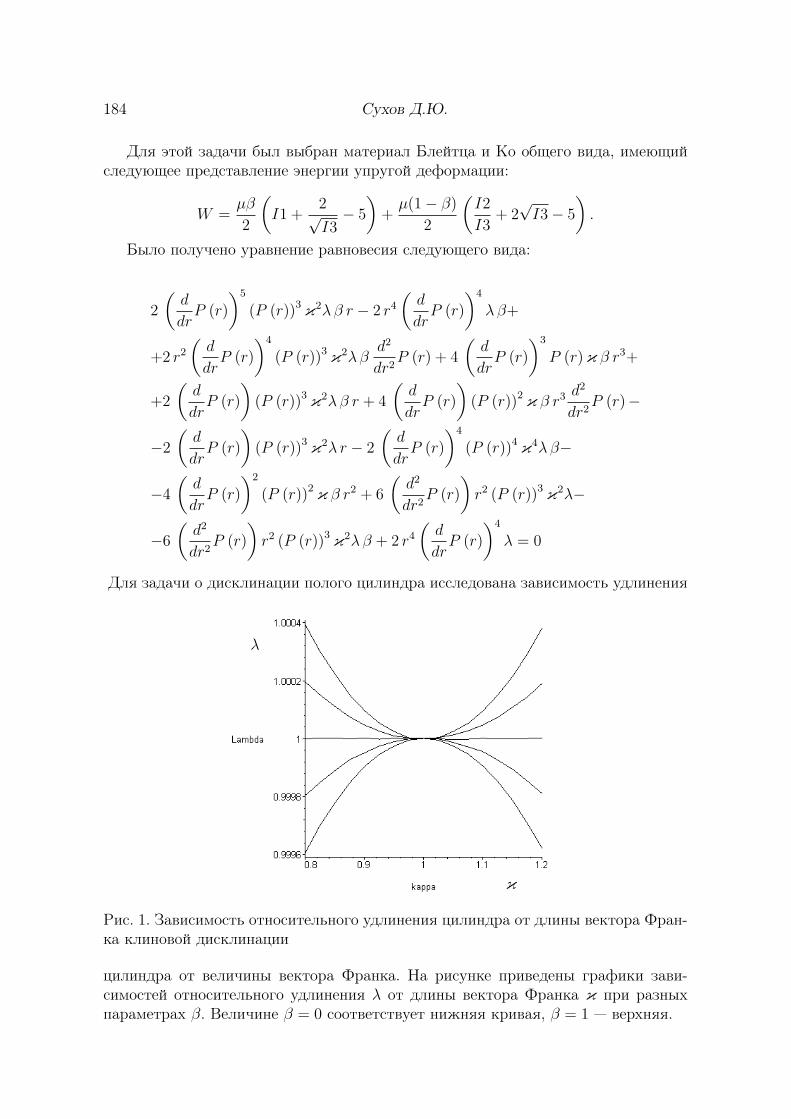
184 Сухов Д.Ю.
Для этой задачи был выбран материал Блейтца и Ко общего вида, имеющийследующее представление энергии упругой деформации:
W =µβ
2
(I1 +
2√I3− 5
)+
µ(1− β)
2
(I2
I3+ 2
√I3− 5
).
Было получено уравнение равновесия следующего вида:
2
(d
drP (r)
)5
(P (r))3 κ2λ β r − 2 r4
(d
drP (r)
)4
λβ+
+2 r2
(d
drP (r)
)4
(P (r))3 κ2λβd2
dr2P (r) + 4
(d
drP (r)
)3
P (r)κ β r3+
+2
(d
drP (r)
)(P (r))3 κ2λβ r + 4
(d
drP (r)
)(P (r))2 κ β r3 d2
dr2P (r)−
−2
(d
drP (r)
)(P (r))3 κ2λ r − 2
(d
drP (r)
)4
(P (r))4 κ4λβ−
−4
(d
drP (r)
)2
(P (r))2 κ β r2 + 6
(d2
dr2P (r)
)r2 (P (r))3 κ2λ−
−6
(d2
dr2P (r)
)r2 (P (r))3 κ2λβ + 2 r4
(d
drP (r)
)4
λ = 0
Для задачи о дисклинации полого цилиндра исследована зависимость удлинения
λ
κ
Рис. 1. Зависимость относительного удлинения цилиндра от длины вектора Фран-ка клиновой дисклинации
цилиндра от величины вектора Франка. На рисунке приведены графики зави-симостей относительного удлинения λ от длины вектора Франка κ при разныхпараметрах β. Величине β = 0 соответствует нижняя кривая, β = 1 — верхняя.

Численно-аналитическое исследование равновесия упругого цилиндра 185
Видно, что для упрощенного материала Блейтца и Ко наличие дисклинациинезависимо от ее знака приводит к уменьшению длины полого цилиндра. Рассмот-рение более общей модели материала показало, что такое влияние дисклинации наудлинение не является однозначным. В случае, когда параметр β материала ра-вен единице, картина деформации противоположная –– дисклинация любого зна-ка приводит к увеличению длины цилиндра. Промежуточные значения параметрасоответствуют промежуточным значениям удлинения цилиндра, и при значенииβ = 1
2можно предполагать сохранение длины цилиндра.
Также была изучена задача о порообразовании вокруг оси винтовой дислока-ции, полуобратное представление которой имеет следующий вид:
R = P (r)Φ = ϕZ = aϕ
,
где a — длина вектора Бюргерса винтовой дислокации.Используется упрощенный материал Блейтца и Ко, упругая энергия деформа-
ции которого имеет следующий вид:
W =µ
2
(I2
I3+ 2
√I3− 5
).
Было получено следующее уравнение равновесия:
−2 a2ψ2
(d
drP (r)
)(P (r))3 + 6 a2ψ2
(d2
dr2P (r)
)r (P (r))3 +
+2 a2r
(d
drP (r)
)4
− 12 aψ
(d2
dr2P (r)
)r (P (r))3 λ+
+4 aψ
(d
drP (r)
)(P (r))3 λ + 6
(d2
dr2P (r)
)r (P (r))3 λ2+
+2 r3
(d
drP (r)
)4
λ2 − 2
(d
drP (r)
)(P (r))3 λ2 = 0.
В качестве результата получены зависимости внутреннего радиуса цилиндраот вектора Бюргерса винтовой дислокации.
На графике по оси абсцисс отложен внутренний радиус цилиндра до деформа-ции, на оси ординат — тот же радиус после деформации. Первая кривая совпадаетна графике с нулем по оси ординат, ей соответствует нулевое значение вектораБюргерса. Самой верхней кривой соответствует значение вектора Бюргерса, рав-ное 0.25, остальные значения расположены на интервале (0, 0.25) равномерно.
Для данной задачи численно показано, что для полого цилиндра с достаточномалым радиусом полости образование винтовой дислокации вызывает увеличе-ние внутреннего радиуса цилиндра, пропорциональное величине дислокации и независящее от размера начальной полости, что хорошо согласуется с известнымфактом невозможности существования винтовой дислокации в сплошном цилин-дре для упрощенного материала Блейтца и Ко [5].
186 Сухов Д.Ю.
P (r0)
r0
Рис. 2. Зависимости между внутренним радиусом цилиндра в отсчетной и текущейконфигурациях для разных длин вектора Бюргерса
Список литературы[1] Лурье А.И. Нелинейная теория упругости. М.: Наука, 1980. 512 с.
[2] В. Говорухин, В. Цибулин Компьютер в математическом исследовании. Maple,MATLAB, LaTeX. С.-П.: Питер, 2001. 624 c.
[3] Справочная система Maple 8.00, Waterloo Maple Inc., 2002.
[4] Гавриляченко Т.В., Карякин М.И. Методы компьютерной алгебры в задачах нели-нейной теории упругости // “Современные проблемы механики сплошной среды”.Труды 2-й Международной конференции. Т. 1 Ростов н/Д.: МП Книга, 1996. С.30–34.
[5] Zubov L.M. Nonlinear Theory of Dislocations and Disclinations in Elastic Bodies. //Springer-Verlag. Berlin-Heidelberg-New York.1997.205p.
Sukhov D.U. Numerical and analytical examination of nonlinear elastic cylinder withisolated defect . In this paper an equilibrium problems for a hollow elastic cylinder with wedgedisclination and, separately, with screw dislocation are considered. Complete and simplifiedBlatz and Ko models are used. The dependencies between stretch and material parameters aswell as Frank vector are analyzed for the wedge disclination problem. The dependence betweeninner radius of very thick cylinder and Burgers vector is examined for the screw dislocationproblem; the wall of the cylinder is considered very thick. The proof of impossibility of theexistence of screw dislocation in solid cylinder is obtained.

АНИЗОТРОПНЫЕ ТЕЛА С ТРЕЩИНАМИ
Сыромятников П.В., Ратнер С.В.Южный научный центр РАН, Краснодар
Рассматривается смешанная задача динамической теории упругости для многослой-ного выпуклого тела с произвольной упругой анизотропией слоев, содержащих плоскиебесконечно тонкие трещины, описываемые теорией Гриффитса. Системы интегральныхуравнений, полученные на основании теоремы Бетти, связывают скачки перемещений инапряжений на берегах трещин. Для случая плоскопараллельных слоев с совокупностьюплоских трещин на границах между слоями предлагается численно- аналитический ме-тод построения символа Фурье расширенной матрицы ядра системы интегральных урав-нений. Метод устойчив при любом количестве слоев и для произвольной комбинациинепрерывных и разрывных условий на границах слоев. Численные примеры приводятсядля пакета из нескольких разнородных анизотропных слоев.
Рассматривается выпуклое упругое анизотропное тело, разделенное на N па-раллельных сечений. В сечении x3 = hn имеются неоднородности с носителями Sn,n = 1, 2, ..., N объединения которых может представлять собой совокупностьодно — или многосвязных областей. Для вывода интегральных уравнений при-меним метод, предложенный в [1] для изотропных сред и развитый в [2]. ПустьS0 — полная поверхность тела; u±ns, τ±ns — перемещения и напряжения, действу-ющие в сечениях x3 = hn при x3 → hn ± 0; uns — перемещения на поверхноститела; l = (l1, l2, l3) — единичный вектор внешней нормали к поверхности S. Присделанных предположениях краевая задача эквивалентна системе интегральныхуравнений (СИУ) следующего вида:
N+1∑n=0
3∑m=1
∫∫
Sn
Lkm(α, κ, l)unm(ξ) exp(i〈αξ〉)dS =
=N+1∑n=0
3∑m=1
∫∫
Sn
Dkm(α, κ)τnm(ξ) exp(i〈αξ〉)dS,
(1)
α = α1, α2, α3, |α1| ≤ ∞, |α2| ≤ ∞, α3 = σ±k (α1, α2, κ),
ξ = ξ1, ξ2, ξ3, 〈αξ〉 =3∑
j=1
αjξj, k = 1, 2, 3.
Поясним смысл входящих в уравнение (1) величин. Введем матрицу Y с эле-
ментами Ynm = −3∑
j=1
3∑p=1
Cmjnpαjαp + δnmκ2; κ2 = ρω2; n,m = 1, 2, 3; где Cmjnp —
тензор коэффициентов упругости тела; ω — круговая частота; ρ — плотность; κ —приведенная частота; δnm — символ Кронекера; αj — параметры преобразованияФурье. Определитель матрицы Y является многочленом шестой степени с дей-ствительными коэффициентами относительно α3.

188 Сыромятников П.В., Ратнер С.В.
V = detY =6∑
r=0
Prαr3. (2)
Корни многочлена (2) σn разобьем на две равные группы и обозначим какσ±n , n = 1, 2, 3. Здесь σ+
n соответствуют l3 > 0 и выбираются согласно условиямубывания или излучения при x3 → +∞ [1] , в свою очередь, σ−n соответствуютl3 < 0, x3 → −∞. В частности, в изотропном случае σ±n = ±σn. Для анизотропныхматериалов более подробно способы выбора σ±n описаны в [3]. Далее, введем мат-рицу c0 = V Y−1 и сформируем матрицы L,D следующим образом. Если σ±n явля-ется простым корнем (2), то, выбрав любую ненулевую строку d матрицы c0
dm = fm
можно положить Lni = L±ni =3∑
m=1
fmtmi, Dnm = D±nm = fm, tkm = i
3∑n=1
3∑j=1
Cnjkmαmlj,
m, k, i = 1, 2, 3. Если σ±n является двукратным корнем (2), то, выбрав две линей-но независимые строки d, r матрицы c0 и положив c0
dm = f(1)m , c0
rm = f(2)m , можно
записать Lji = L±ji =3∑
m=1
f(j)m tmi, Djm = D±
jm = f(j)m , j = 1, 2, i,m = 1, 2, 3. Уравне-
ния (1) значительно упрощаются в случае плоских верхних и нижних границ, таккак l1 = l2 = 0, l3 = ±1. Ниже будем считать, что рассматривается упругий слойс N неоднородностями. Обозначим через Unm, Tnk двумерное преобразование Фу-рье функций unm, τnk. После преобразований и упрощений получим в матричнойформе соотношения
L±n U+n − L±n+1U
−n+1 = D±
n T+n −D±
n+1T−n+1. (3)
Здесь L±n = E(n)±L±, D±n = E(n)±D±, E
(n)±km = δkm exp(iσ±k hn), k, m = 1, 2, 3.
Решение линейной системы уравнений (3) относительно ее правой или левой ча-сти можно получить, обращая однотипные блоки матриц. Обозначим через F(m,k)±,G(n) следующие матрицы: F
(m,k)±pr = δpr exp(iσ±p (hk − hm)), p, r = 1, 2, 3;
G(n) =
(L− −F(n,n+1)−L−
L+ −F(n,n+1)+L+
)−1 (D− −F(n,n+1)−D−
D+ −F(n,n+1)+D+
)=
(G
(n)11 G
(n)12
G(n)21 G
(n)22
).
Система (3) упрощается, если ввести новые неизвестные Un = U+n − U−
n ,имеющие смысл символов скачков перемещений. Примем во внимание, что вслучае трещин необходимо положить T+
n = T−n = Tn. Относительно векторов
U =U+
0 ,U1, ...,UN ,U−N+1
, T = T0,T1, ...,TN ,TN+1 систему уравнений (3)
представим в матричном виде U = KT, где матрица K состоит из блоков K(i,j):
K(1,1) = G(0)11 , K(1,2) = G
(0)12 , K(N+2,N+1) = G
(N)21 , K(N+2,N+2) = G
(N)22 , (4)
K(n+1,n) = −G(n−1)21 , K(n+1,n+1) = G
(n)11 −G
(n−1)22 , K(n+1,n+2) = G
(n)12 , n = 1, 2, ..., N.
В случае, когда упругие свойства слоев различны, достаточно вычислять мат-рицы G(n) для каждого слоя со своими материальными константами. С учетомприведенных выше обозначений приходим к СИУ вида:
Анизотропные тела с трещинами 189
N+1∑n=0
3∑j=1
∫
Γ1
∫
Γ2
K(p,n)mj Q
(n)j (α1, α2) exp(−i(α1x1 + α2x2))dα1dα2 = z(p)
m (x1, x2), (5)
x1, x2 ⊂ Sp, m = 1, 2, 3, p = 0, 1, ..., N + 1.
Контуры интегрирования Γ1, Γ2 выбираются в соответствии с принципом из-лучения на бесконечности [1] ; Q
(n)j — образы Фурье функций q
(n)j = τnj; z
(p)m =
u+pm − u−pm, p = 1, 2, ..., N — заданные амплитуды скачков перемещений, действу-
ющих на границах неоднородностей с частотой ω; z(0)m = u+
0m, z(N+1)m = u+
(N+1)m —заданные амплитуды перемещений на нижней и верхней границе слоя соответ-ственно, также действующих с частотой ω.
На основании вышеизложенного метода и подхода работы [4] были проведенырасчеты амплитуд механических перемещений на поверхности пакета анизотроп-ных слоев, вызываемых гармоническими колебаниями берегов трещин, качествен-но совпадающие с результатами [4].
Работа выполнена при поддержке грантов РФФИ, программа Юг России, про-екты (06–01–96802), (06–01–96803), (06–01–96804), (06–01–96805), (06–05–96806),(05–01–00902), проект НШ–4839.2006.1, программ отделения ЭММПУ и Прези-диума РАН, выполняемых Южным научным центром РАН.
Список литературы[1] Бабешко В.А., Глушков Е.В., Зинченко Ж.Ф. Динамика неоднородных линейно–
упругих сред. М.: Наука, 1989. 344 с.
[2] Бабешко В.А. Тела с неоднородностями; случай совокупности трещин // ДАН. 2000.Т. 373. 2. С. 191–193.
[3] Бабешко В.А., Сыромятников П.В.Метод построения символа Фурье матрицы Гри-на многослойного электроупругого полупространства // МТТ. 2002. 5. С. 35–47.
[4] Бабешко В.А., Ратнер С.В., Сыромятников П.В. О смешанных задачах для тер-моэлектроупругих сред с разрывными граничными условиями // ДАН 2007. Т. 412. 6. С. 1–6.
Syromyatnikov P.V., Ratner S.V. Anisotropic bodies with cracks. A mixed task ofelastodynamic for layered prominent solid with an arbitrary anisotropy and the system of innerplane cracks is studied. Systems of integral equations, based on Betty’s formula, connectingdiscontinuity of stresses and motions on the crack’s faces are obtained. For the case of parallellayers with interface cracks the numerical-analytical method for construction of matrix of thesystem of integral equation is proposed. The method is durable for arbitrary number of layersand for arbitrary dislocation of continues and discontinues interface conditions between layers.Some numerical results are discussed.
ДИФРАКЦИЯ ПОВЕРХНОСТНОЙ ВОЛНЫ НА РЕШЕТКЕЦИЛИНДРОВ
Трепачев В.В.Ростовская академия сельхозмашиностроения
Исследуется линейная задача рассеяния поверхностной волны, которая оказываетфронтальное воздействие на решетку вертикальных круговых цилиндров. Найдены силадавления волнового потока на цилиндр и коэффициент отражения. Учитывается влия-ние диссипации энергии на резонансные характеристики волнового поля в окрестностипрепятствия.
Рассеяние поверхностных волн препятствиями в жидкости рассматривалосьв [1]–[6]. В [1] отмечены трудности практического использования теории и экспе-риментальных измерений для оценки нагрузки на препятствие. Сходные пробле-мы возникают в акустической дифракции [7], [8], в гидроупругости конструкций[9], [10]. Опоры морских сооружений выполняют чаще всего в виде круговых ци-линдров. Давление волны на поверхности цилиндра, вызванное падающей волны,не уравновешено, т.е. не равно нулю. Неуравновешенное давление падающей вол-ны называется составляющей Борна [4]. Существуют тонкие тела, для которыхсоставляющая Борна равна нулю, например, пластина [6]. Лэмб при построениитеории узкого канала пренебрег малыми второго порядка в граничном условии наповерхности цилиндра [2]. В [4] получена оценка точности приближения Борна взадаче рассеяния волны на сфере. В случае пластины оценку нагрузки следуетрассматривать с учетом особенностей поля скоростей на ее краях [6]. На поверх-ности кругового цилиндра не возникают особенности поля скоростей.
Рассмотрим постановку задачи о дифракции плоской волны на решетке верти-кальных круговых цилиндров [5]. Величины 2b, 2a, h равны периоду решетки, диа-метру кругового цилиндра, глубине жидкости. Жесткий неподвижный цилиндррасположен симметрично относительно боковых границ элемента решетки. Высо-та цилиндра больше глубины слоя жидкости. На цилиндрическую преграду на-бегают плоские регулярные волны заданной амплитуды с ориентацией волновоговектора k0 вдоль оси x
ϕ(x, y, z) =ch k0(z + h)
ch k0h[ϕp(x) + ϕd(x, y)];
η = ηp(x) + ηd(x, y); ηp = η0e−ik0(x+L0); L0 > 2a,
Im k0 < 0, ω2 − iµω = gk0 th(k0h), µ > 0,
где η0 — амплитуда падающей волны при x = −L0, k0 — волновое число поверх-ностной волны.

Дифракция поверхностной волны на решетке цилиндров 191
Потенциал рассеянной волны ϕd и форма поверхности рассеянной волны прикоэффициенте диссипации µ > 0 удовлетворяет условию убывания
lim(ϕd, ηd) = 0, |x| → ∞.
Отделяя множители eiωt, ch k0(z + h)/ ch k0h, определяющие зависимость ре-шения от времени и глубины [3], [5] находим постановку задачи для определе-ния функции ϕd(x, y) в размерных переменных. Введем безразмерные величины,в которых радиус цилиндра и амплитуда потенциала ϕp равны единице. Имеемпостановку задачи для потенциала ϕd(x, y) в виде
∂2ϕd
∂x2+
∂2ϕd
∂y2+ k2
0ϕd = 0;
∂ϕd
∂r= −∂ϕp
∂r, r = 1; (1)
∂ϕd
∂y= 0, y = ±b, b > 1, |x| < ∞;
ϕd → 0, |x| < ∞, |y| ≤ b;
ϕp = e−ik0x, Rek0 > 0, Imk0 < 0.
Подставляя ϕp в граничное условие при r = 1, выводим граничное условие наконтуре цилиндра в полярных координатах r, θ
∂ϕd
∂r= −
∞∑n=0
εn cos θ∂
∂rJn(k0r), r = 1, (2)
где Jn(z) — функции Бесселя первого рода. Первое слагаемое граничного усло-вия указывает на наличие источника в рассеянном поле, второе слагаемое имеетсмысл вклада диполя, а остальные слагаемые определяют вклад мультиполей [3].Рассмотрим постановку граничной задачи для уравнения Гельмгольца в (1), какпериодическую вдоль координаты y, считая период равным 2b
yk = y − 2bk, xk = x, k = 0,±1,±2, ...,
rk =√
y2k + x2
k, x0 = x, y0 = y, r0 = r, (3)
yk = rk cos θk, xk = rk sin θk, θ0 = θ.
Воспользуемся методом зеркального отображения. Общее решение (1) отыски-ваем в виде суммы с неизвестными Cn в следующем виде
ϕd =∞∑
n=0
CnFn(x, y). (4)
Введем функцию, являющуюся частным решением уравнения Гельмгольца
Fn(x, y) = H(2)n (k0r) cos nθ + Sn(x, y). (5)
192 Трепачев В.В.
Сумма Sn в локальных полярных координатах (3) определена
Sn(x, y) =∞∑
k=1
[H(2)
n (k0rk) cos nθk + H(2)n (k0r−k) cos nθ−k
], (6)
где H(2)n (z) — функции Ханкеля второго рода [3]. Формула (6) определяет частное
решение уравнения Гельмгольца, учитывающее все цилиндры, расположенные внеобласти |x| < ∞, |y| < b.
Приближенное асимптотическое решение бесконечной системы уравнений, по-лученное из элементов, находящихся на ее главной диагонали равно
cs = − εsχs(k0)
1 + 2χs(k0)[γ2s(β) + γ0(β)],
χs(k0) =Js,k0(k0)
Hs,k0(k0), β = 2bk0, Imβ < 0, s = 0, 1, 2, . . . . (7)
В числителе формулы (7) находится решение задачи о падении плоской вол-ны на одиночный круговой цилиндр [3]. Функции параметров k0, β, находящиесяв знаменателе формулы, определяют поправки к решению задачи об одиночномцилиндре при большом значении параметра β, где m — целое число. Функция γm
равна интегралу
γm(β) = − 1
2πi
−∞i∫
π+i∞
e−iβ2
sin θ+imθ dθ
sin((β/2) sin θ). (8)
Из (7), (8) следует, возникновение поперечных резонансов снижает уровеньизлучения в направлении оси решетки.
Теорема. Коэффициент отражения R0 и коэффициент пропускания D0 удо-влетворяют уравнению
R0 −D0 = −(1 + f/2b), lk0 = 2π, l > 1. (9)
Значения x = ±l определяет положение измерителей величин R0 и D0 за преде-лами цилиндра
Доказательство теоремы следует из условий равновесия и закона сохраненияволновой энергии. Из формулы (9) вытекает ограниченность безразмерной дина-мической нагрузки на препятствие, т.е. |f |k−1
0 th k0h.
Список литературы[1] Бреббиа К., Уокер С. Динамика морских сооружений. Л.: Судостроение, 1983. 232 с.
[2] Лэмб Г. Гидродинамика. М.-Л.: ОГИЗ. Гостехиздат, 1947. 948 с.
[3] Хаскинд М.Д. Гидродинамическая теория качки корабля. М.: Наука, 1973. 327 с.
Дифракция поверхностной волны на решетке цилиндров 193
[4] Долина И.С., Пелиновский Е.Н. Длинноволновое приближение в задачах рассеянияморских волн препятствиями // В кн.: Методы гидрофиз. исследований. Волны ивихри. Горький: ИПФ АН СССР, 1987. С. 184–194.
[5] Трепачев В.В. Дифракция поверхностных волн на цилиндре в канале // Современ-ные проблемы механики сплошной среды: Тр. V Междунар. Конф. 12–14 октября1999 г./ НИИМиПМ. Ростов н/Д, 2000. Т. 1. С. 180–183.
[6] Трепачев В.В. Дифракция волн на пластине в узком канале // Изв. ВУЗов Сев.-Кавказ. Региона. Естеств. науки. 2002. 2. С. 63–65.
[7] Шендеров Е.Л.Волновые задачи гидроакустики. Л.: Судостроение, 1972. 352 с.
[8] Виноградова М.Б., Руденко О.В., Сухоруков А.П. Теория волн. М.: Наука, 1990. 430 с.
[9] Гузь А.Н., Кубенко В.Д., Бабаев А.Э. Гидроупругость систем оболочек. К.: Вищашкола, 1984. 208 с.
Trepachev V.V. Surface fluid wave diffraction around cylinder in lattice. In present workwe study dispersion of surface wave, wich has an front influence and reflation coefficient onthe cylinder. Taked in to consideration energy dissipation on wave field resonance natureshear obstacles.
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ПЕРЕМЕНЫ ЗНАКА ГРАДИЕНТАУПРУГИХ СВОЙСТВ СРЕДЫ ПРИ РЕШЕНИИ КОНТАКТНЫХ
ЗАДАЧ ДЛЯ НЕОДНОРОДНОГО СЛОЯ
Трубчик И.С.НИИ механики и прикладной математики им. Воровича И.И. Южного
федерального университета, Ростов-на-Дону
Рассматриваются статические контактные задачи для слоя (полосы) при произ-вольных законах изменения упругих свойств по глубине. Градиент изменения упру-гих свойств может быть положительным, отрицательным или менять знак по тол-щине слоя. Задачи сводятся к интегральному уравнению Фредгольма с логарифмиче-ским ядром. Излагаются эффективные методы численного построения трансформантядер интегрального уравнения. Исследованы свойства трансформант ядер интегральныхуравнений. В частности, установлено отличие свойств трансформант ядер интеграль-ных уравнений, полученных для многослойного и однородного основания, от аналогич-ных свойств трансформант ядер интегральных уравнений, полученных для непрерывно-неоднородного слоя (полосы), и показано, что это отличие влияет на асимптотический ха-рактер решения. Установлено, что построенные решения являются двухсторонне асимп-тотически точными решениями исходного интегрального уравнения, как при малых, таки при больших значениях безразмерного геометрического параметра задачи. Метод поз-воляет найти решение задачи для достаточно широкого класса законов неоднородности,а также проанализировать изменение напряжено-деформированного состояния полосы взависимости от характера изменения по ее толщине упругих свойств. Задача поставленав связи с необходимостью прогнозирования явления отслаивания современных покрытийсложной структуры от недеформируемой подложки.
Рассматриваются статические контактные задачи: (I) о сдвиге полосовымштампом с плоским основанием |x| ≤ a, −∞ < z < ∞ градиентного слоя, жесткоскрепленного с недеформируемым основанием. На каждую единицу длины штам-па действует сдвигающее усилие P , параллельное оси z, под действием которогоштамп переместится в направлении оси z на величину ε, вызвав в слое деформа-цию чистого сдвига;
(II) о вдавливании недеформируемого штампа шириной 2a и нижним основа-нием, имеющим форму γ(x), в верхнюю границу упругой градиентной полосы.Под действием силы P штамп перемещается по оси y на величину δ.
Для обеих задач коэффициент Пуассона ν = const, модуль сдвига слоя G == G0f(y) модуль Юнга полосы с глубиной изменяется по закону E = E0f(y), гдеf(y) — произвольная, непрерывная всюду в области определения −h ≤ y ≤ 0отличная от нуля функция, градиент изменения упругих свойств слоя (полосы)может быть положительным, отрицательным или менять знак для −h ≤ y ≤ 0.Для задачи (II) силы трения между штампом и полосой отсутствуют. Предполага-ется, что отсутствуют также и напряжения вне штампа, а слой жестко закрепленпо нижнему основанию. Требуется определить распределение контактных каса-тельных (I) и нормальных (II) напряжений под штампом

Исследование влияния перемены знака градиента упругих свойств среды ... 195
τ(yz)(x, 0, z) = −τ(x, σy(x, 0)), |x| ≤ a.
Задачи (I) и (II) сводятся к решению интегрального уравнения Фредгольма слогарифмическим ядром
1∫
−1
ϕ(ξ)k(ξ − x
λ) dξ = θπg(x), |x| ≤ 1 (1)
где k(t) =∫∞
0L(u)
ucos ut du, θ = G
1−ν, ϕ(ξ), — функция распределения контактных
давлений, G и ν — модуль сдвига и коэффициент Пуассона слоя.Здесь ϕ(x′) = q(x)/θ, x′ = x/a, λ = h/a, g(x′) = ε/a (для задачи I), g(x′) =
= (−δ + γ(x))/a (для задачи II), q(x) — контактные напряжения, a — полуширинаштампа, h — толщина слоя (полосы).
Для численного построения трансформант ядер интегральных уравнений при-меняется метод интегральных преобразований.
В настоящей работе задачи сводятся к решению обыкновенного дифференци-ального уравнения второго порядка (в антиплоской задаче I) или системы диф-ференциальных уравнений второго порядка (в плоской задаче II) относительнотрансформант интегрального преобразования Фурье функций перемещений с пе-ременными коэффициентами:
d~w(u, z)
dz= A~w(u, z), z ∈ [−h; 0] (2)
В задаче (I) ранг матрицы A равен двум, а в задаче (II) – равен четырем. Ко-эффициенты матрицы являются переменными по z. Краевые условия для уравне-ния (2) выписываются из условий на верхних и нижних гранях слоя (полосы). Вчастности, в задаче (I) матрица A имеет вид:
A =
∥∥∥∥0 1u2 −η
∥∥∥∥ , ~w =
∥∥∥∥w1
w2
∥∥∥∥
граничные условия: w1(u,−h) = 0, w2(u, 0) = |u|.В задаче (II)
A =
∥∥∥∥∥∥∥∥
0 1 0 0u2 −η −uη − 2u
κ−1
0 0 0 1u 2u
κ+1u2 κ−1
κ+1−η
∥∥∥∥∥∥∥∥, ~w =
∥∥∥∥∥∥∥∥
w1
w2
w3
w4
∥∥∥∥∥∥∥∥
где κ = 3 − 4ν, η = G′/G = E ′/E, штрих означает производную по y. Граничныеусловия в данной задаче имеют вид:
w1(u,−h) = w3u,−h) = 0, ew2(u, 0) + uw3(u, 0) = 0,(κ− 3)uw1(u, 0) + (κ + 1)w4(u, 0) = 4u(κ− 7)2/(κ2 − 1).
196 Трубчик И.С.
Далее, решение системы дифференциальных уравнений представляется в виделинейной комбинации фундаментальных решений
~w(u, z) =r∑
i=1
Ci(u)~ΨFi (u, z) (3)
где ~ΨFi (u, z) = Ti(u, z)~Ψi(u, z), Ti(u, z) — диагональные матрицы, на диагонали
которых — компоненты векторов ~ti(u, z) = ( t1i (u, z), t2i (u, z), . . . , tri (u, z)).Векторы ~Ψi(u, z) являются собственными векторами матриц A для k(z) = 0
(для однородной среды), ~ti(u, z) — векторы модулирующих функций, связанныхс неоднородностью среды, Ci(u) — некоторые коэффициенты, не зависящие от zи определяемые из решения системы линейных алгебраических уравнений, по-лучающейся из краевых условий. Данный прием позволяет выделить в выраже-нии (3) составляющие ~Ψi(u, z), затрудняющие процесс численной реализации ре-шения. Компоненты векторов ~Ψi(u, z) могут быть как экспоненциальными, так итригонометрическими функциями (а также гипергеометрическими и цилиндриче-скими функциями) в зависимости от геометрии среды.
Векторы модулирующих функций определяются из задач Коши при фиксиро-ванных значениях u
d~ti(u, z)
dz= Bi
~ti(u, z), z ∈ [−h; 0]
где матрицы Bi = ~Ψ−1i
(A~Ψi − Ed~Ψi
dz
)(i = 1, . . . , r). Начальные условия
~ti(u,−h) определяются, исходя из вида решения уравнения 2 для однородных слояили полосы на их нижней грани z = −h.
Таким образом, получены следующие выражения для численного построениятрансформант L(u):
(I) : L(u) = |u| (t11 − T 12 exp−2|u|h) / (t21 − T 2
2 exp−2|u|h) , tji = tji (u, 0);
(II) : L(u) =∑4
i=1 Ci.(u)T 3i (u, 0)
Исследованы свойства трансформант ядер L(u) интегральных уравнений. Вчастности, для градиентного слоя трансформанты ядер парных интегральныхуравнений обладают следующими свойствами:
L(u) = A|u|+ Bu2 + o(u3), u → 0;L(u) = 1 + c1|u|−1 + c2u
−2 + o(u−3), u →∞ (4)
Установлено отличие свойств трансформант ядер интегральных уравнений, по-лученных для многослойного и однородного основания, от аналогичных свойствтрансформант ядер интегральных уравнений, полученных для градиентного слоя(полосы). В работе [1] доказана теорема о том, что функцию L(u), обладающуюсвойствами (4), можно аппроксимировать выражениями вида:
L(u) = tanh Au
[N∏
n=1
u2 + δ2n
u2 + γ2n
+∞∑
k=1
ck|u|u2 + η2
k
](5)
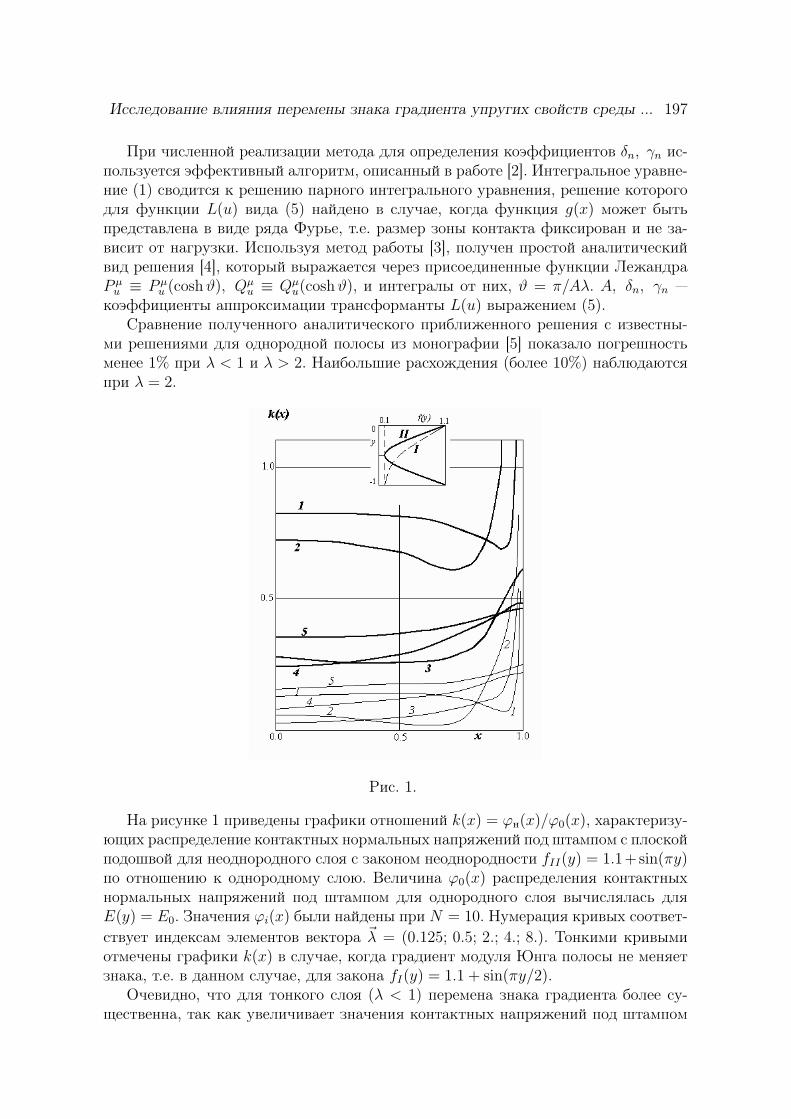
Исследование влияния перемены знака градиента упругих свойств среды ... 197
При численной реализации метода для определения коэффициентов δn, γn ис-пользуется эффективный алгоритм, описанный в работе [2]. Интегральное уравне-ние (1) сводится к решению парного интегрального уравнения, решение которогодля функции L(u) вида (5) найдено в случае, когда функция g(x) может бытьпредставлена в виде ряда Фурье, т.е. размер зоны контакта фиксирован и не за-висит от нагрузки. Используя метод работы [3], получен простой аналитическийвид решения [4], который выражается через присоединенные функции ЛежандраP µ
u ≡ P µu (cosh ϑ), Qµ
u ≡ Qµu(cosh ϑ), и интегралы от них, ϑ = π/Aλ. A, δn, γn —
коэффициенты аппроксимации трансформанты L(u) выражением (5).Сравнение полученного аналитического приближенного решения с известны-
ми решениями для однородной полосы из монографии [5] показало погрешностьменее 1% при λ < 1 и λ > 2. Наибольшие расхождения (более 10%) наблюдаютсяпри λ = 2.
Рис. 1.
На рисунке 1 приведены графики отношений k(x) = ϕн(x)/ϕ0(x), характеризу-ющих распределение контактных нормальных напряжений под штампом с плоскойподошвой для неоднородного слоя с законом неоднородности fII(y) = 1.1+sin(πy)по отношению к однородному слою. Величина ϕ0(x) распределения контактныхнормальных напряжений под штампом для однородного слоя вычислялась дляE(y) = E0. Значения ϕi(x) были найдены при N = 10. Нумерация кривых соответ-ствует индексам элементов вектора ~λ = (0.125; 0.5; 2.; 4.; 8.). Тонкими кривымиотмечены графики k(x) в случае, когда градиент модуля Юнга полосы не меняетзнака, т.е. в данном случае, для закона fI(y) = 1.1 + sin(πy/2).
Очевидно, что для тонкого слоя (λ < 1) перемена знака градиента более су-щественна, так как увеличивает значения контактных напряжений под штампом
198 Трубчик И.С.
по сравнению c монотонным законом неоднородности. Также видно, что опреде-ляющим при приближении к границе зоны контакта является влияние приповерх-ностного слоя.
Установлено, что построенные решения являются двухсторонне асимптотиче-ски точными решениями исходного интегрального уравнения как для малых, таки для больших значений безразмерного геометрического параметра λ.
Автор благодарит С.М. Айзиковича за внимание к работе.Работа написана при поддержке грантов РФФИ 05-08-18270, 06-08-0159, 07-08-
00730.
Список литературы[1] Айзикович С.М., Трубчик И.С. Асимптотические свойства приближенного решения
одного класса парных интегральных уравнений // ПММ. 1988. Т. 52, Вып 5. С. 850–856.
[2] Айзикович С.М. Асимптотические решения контактных задач теории упругости длянеоднородных по глубине сред // ПММ. 1982. Т. 46, 1. С. 148–158.
[3] Зеленцов В.Б. О решении одного класса интегральных уравнений // ПММ.1982.Т. 46, вып. 5. С. 815–820.
[4] Айзикович С.М., Александров В.М., Белоконь А.В., Трубчик И.С., Кренев Л.И.Контактные задачи теории упругости для неоднородных сред. М.: Физматлит, 2006.240 с.
[5] Ворович И.И., Александров В.М., Бабешко В.А. Неклассические смешанные задачитеории упругости. М.: Наука, 1974. 456 с.
Trubchik I.S. Investigation of the sign changing of the elastic properties gradient onthe solution of contact problems for the inhomogeneous layer . The static contact problemsfor the layer (strip) in the case when the elastic properties of the medium are arbitraryfunctions of its thickness. The the elastic properties gradient can be positive, negative or maychange its sign with layer thickness. This problems are reduced to the Fredholm’s integralequations with the logarithmic kernel.The effective numerical methods are described for thekernel transforms construction. The properties of these kernel transforms are investigated.In particular the difference between obtained kernel transforms for the inhomogeneous layerand the ones for the multilayered medium were recognized and proved that this differenceinfluenced on the asymptotical properties of the problems solution. It is recognized also thatthe resulting approximate solution is asymptotically accurate for as small as large evaluationsof the character parameter. This method permits to obtain the problems solution for the wideclass of the inhomogeneity laws and to investigate the influence of elastic properties changingon the strain state of the layer. These problems were posed in view of necessity of technologicforecasting the modern coatings peeling occurrence from the nondeformable substrate.

ЗАДАЧА СЕН-ВЕНАНА ДЛЯ ПРИЗМЫ СО СЛОЖНОЙАНИЗОТРОПИЕЙ
Устинов Ю.А., Ватульян К.А.Южный федеральный университет, Ростов-на-Дону
На основе метода однородных решений задача Сен-Венана о кручении призмы соспециальной анизотропией сводится к двумерной краевой задаче для уравнений в част-ных производных. Доказывается разрешимость этих задач и дается их вариационнаяпостановка.
В [1] в связи с изучением напряженно-деформируемого состояния (НДС) нано-трубок были построены решения задач Сен-Венана о растяжении и кручении гра-фитового цилиндрического стержня с криволинейной анизотропией. В настоящейработе рассматривается задача кручения цилиндрического графитового стержняс прямолинейной анизотропией. Ранее попытка построения таких решений былапредпринята в [2]. Однако авторы этой работы допустили существенные ошибкии получили неправильные результаты.
Задача кручения
Рассмотрим упругое равновесие призмы, занимающей область V = S × [0, L],где S — поперечное сечение; L — длина; Γ = ∂S × [0, L] — боковая поверхность;∂S — граница S. С центром тяжести одного из торцов свяжем начало декартовойсистемы координат x1, x2, x3.
Будем рассматривать случай, когда боковые поверхности цилиндра свободныот напряжений.
n1σ11 + n2σ12 = 0, n1σ12 + n2σ22 = 0 (1)
Приведем основные соотношения, описывающие напряженно-деформированноесостояние (НДС).
Соотношения обобщенного закона Гука в данном случае имеют вид [3]:
σ11 = C11e11 + C12e22 + C13e33 + 2C14e23
σ22 = C12e11 + C11e22 + C13e33 − 2C14e23
σ33 = C13e11 + C13e22 + C33e33, σ23 = C14e11 − C14e22 + 2C44e23 (2)σ13 = 2C44e13 + 2C14e12, σ12 = 2C14e13 + 2C66e12
где Cij — модули упругости.В рассматриваемом случае уравнения равновесия имеют вид:
∂1σ11 + ∂2σ12 + ∂3σ13 = 0
∂1σ12 + ∂2σ22 + ∂3σ23 = 0 (3)∂1σ13 + ∂2σ23 + ∂3σ33 = 0

200 Устинов Ю.А., Ватульян К.А.
Следуя [3], вектор смещений решения Сен-Венана задачи кручения будем отыс-кивать в виде:
u = αx3a0 + a1 (4)a0 = −x2, x1, 0, a1 = a1, a2, a3a1 = a1(x1, x2), a2 = a2(x1, x2), a3 = a3(x1, x2)
где α — относительный угол закручивания (произвольная постоянная);Определяя на основании (4) компоненты тензора деформаций и подставляя их
затем в (2) получаем:
σ11 = σ011 − αC14x2, σ12 = σ0
12 − αC14x2
σ13 = σ013 − αC44x2, σ22 = σ0
22 − αC14x1 (5)σ23 = σ0
23 + αC44x1, σ33 = σ033
где
σ011 = C11∂1a1 + C12∂2a2 + C14∂2a3, σ0
22 = C11∂1a1 + C12∂2a2 − C14∂2a3
σ033 = C13∂1a1 + C13∂2a2, σ0
23 = C14(∂1a1 − ∂2a2) + C44∂2a3
σ013 = C44∂1a3 + C14(∂1a2 + ∂2a1), σ0
12 = C14∂1a3 + C66(∂1a2 + ∂2a1)
Подстановка выражений (5) в уравнения равновесия
∂1σ11 + ∂2σ12 + ∂3σ13 = 0
∂1σ12 + ∂2σ22 + ∂3σ23 = 0
∂1σ13 + ∂2σ23 + ∂3σ33 = 0
и граничные условия (1) приводит к следующей краевой задаче относительнофункций a1, a2, a3:
L1(a1) ≡ ∂1σ011 + ∂2σ
012 = 0
L2(a1) ≡ ∂1σ012 + ∂2σ
022 = 0 (6)
L3(a1) ≡ ∂1σ013 + ∂2σ
023 = 0
M1(a1) ≡ σ011 + n2σ
012 = αC14(−n1x1 + n2x2) = f1
M2(a1) ≡ n1σ012 + n2σ
022 = αC14(n1x2 + n2x1) = f2 (7)
M3(a1) ≡ n1σ013 + n2σ
023 = αC14(n1x2 − n2x1) = f3
Однородная краевая задача (6), (7) (т.е., когда f1 = f2 = f3 = 0) имеет дванетривиальных решения a0 = (−x2, x1, 0) и a′0 = (0, 0, 1). Поэтому неоднороднаязадача имеет решение тогда и только тогда, когда выполняются следующие усло-вия разрешимости:
∮
∂S
(f1x2 − f2x1)ds = 0,
∮
∂S
f3ds = 0 (8)
Задача Сен-Венана для призмы со сложной анизотропией 201
Легко проверить, что они действительно выполняются. Имеем:∮
∂S
(x1f2 − x2f1)ds = αC14
∮
∂S
[2n1x1x2 + n2(x
21 − x2
2)]ds =
= αC14
∫
S
[∂1(2x1x2) + ∂2(x
21 − x2
2)]dS = 0
∮
∂S
f3ds = αC14
∮
∂S
(n1x2 − n2x1)ds = αC14
∫
S
(∂1x2 − ∂2x1)dS = 0
В заключении отметим, что краевая задача (6), (7) эквивалентна нахождениюминимума следующего квадратичного функционала:
Φ(a1) ≡∫
S
σ0ije
0ijdS + l(a1) (9)
где суммирование по i, j = 1, 2, 3;
l(a1) = −2αC14
∫
S
(e011x2 + e0
22x1 + e012x2 + e0
13x2 − e023x1)dS
e011 = ∂1a1, e0
22 = ∂2a2, 2e012 = ∂1a2 + ∂2a1, 2e0
13 = ∂1a3, 2e023 = ∂2a3
Для построения единственного решения задачи (9) необходимо потребоватьвыполнение дополнительных условий:
∫
S
(a1x2 − a2x1)dS = 0,
∫
S
a3dS = 0
Работа выполнена при поддержке Российского Фонда Фундаментальных Ис-следований (код проекта 07-01-00254а).
Список литературы[1] Ю.А. Устинов, К.А. Ватульян. Задача Сен-Венана для графитовых стержней и
углеродных нанотрубок //Современные проблемы механики сплошной среды. ТрудыX международной конференции.Ростов-на-Дону, ЦВВР, 2007. C. 299–303
[2] В.А.Городцов, Д.С. Лисовенко. Упругие свойства графитовых стержней и много-слойных углеродных нанотрубок (кручение и растяжение) // Механика твердого те-ла. 2005. 4. С. 42–56.
[3] Устинов Ю.А. Задачи Сен-Венана для псевдоцилиндров. М.: Физматлит, 2003. 128 с.
Ustinov U.A., Vatulyan K.A. The Saint-Venant problem for a prizm with complexanisotropy . The Saint-Venant problem of torsion of prism with special anisotropy based ona method of homogeneous decisions is reduced to a bidimentional boundary problem for thepartial differential equations. Resolvability of these problems is proved and their variationalstatement is given.
НЕУСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ ГАЗА В ОКРЕСТНОСТИТРЕЩИНЫ ГИДРОРАЗРЫВА
Хапилова Н.С., Залётов В.В.Институт прикладной математики и механики НАН Украины, Донецк
Приведено аналитическое решение задачи о нестационарной фильтрации метана вокрестности вертикальной трещины гидроразрыва, образованной в углепородном масси-ве. Получены формулы для распределения давления газа вблизи трещины. Исследованоперемещение границы области фильтрации метана в породах и угольном пласте.
Процессы неустановившейся фильтрации жидкости вблизи трещин гидрораз-рыва, проведенных в нефтеносных пластах,изучены в работах [1], [2]. Неустано-вившееся движение метана в разрабатываемом угольном пласте в случае, когдавмещающие породы газонепроницаемы, рассмотрено в статье [3]. Ниже исследо-вано неустановившееся движение метана в углепородном массиве в окрестноститрещины гидроразрыва, при этом известное одномерное решение уравнений филь-трации обобщено на случай плоской задачи, решение которой получено для трещи-ны произвольной высоты, которая, в частности, может значительно превосходитьмощность угольного пласта.
Будем рассматривать вертикальную трещину гидроразрыва, образованную изстенки скважины, пробуренной с поверхности (рис. 1). Введем обозначения: L —длина трещины, 2h1 — мощность угольного пласта, 2h2, 2b —высота и шири-на трещины. Если геометрические размеры трещины удовлетворяют условиямL À 2h2, L À 2b, то движение метана в ее окрестности с большой степенью точ-ности может быть исследовано на основе решения плоской задачи теории филь-трации газа.
В вертикальной плоскости S, расположенной перпендикулярно направлениюразвития трещины, введем декартову прямоугольную систему координат xOy(рис. 1). Система соотношений теории фильтрации газа в пористой среде включа-ет уравнение неразрывности, уравнения движения газа в форме закона Дарси иуравнение состояния газа
∂Q
∂t+ div(ρ−→υ ) = 0,−→υ = −k
µgradP, P = ρRT. (1)
Здесь Q — масса газа в единице объёма среды; −→υ —скорость фильтрации; m, k —пористость и проницаемость среды; ρ, µ, T, P — плотность, вязкость, температураи давление газа; R — газовая постоянная.
После преобразований система (1) может быть приведена к уравнению неуста-новившейся фильтрации газа, имеющему вид
div
[k
µρ(P )gradP
]=
∂Q
∂t. (2)
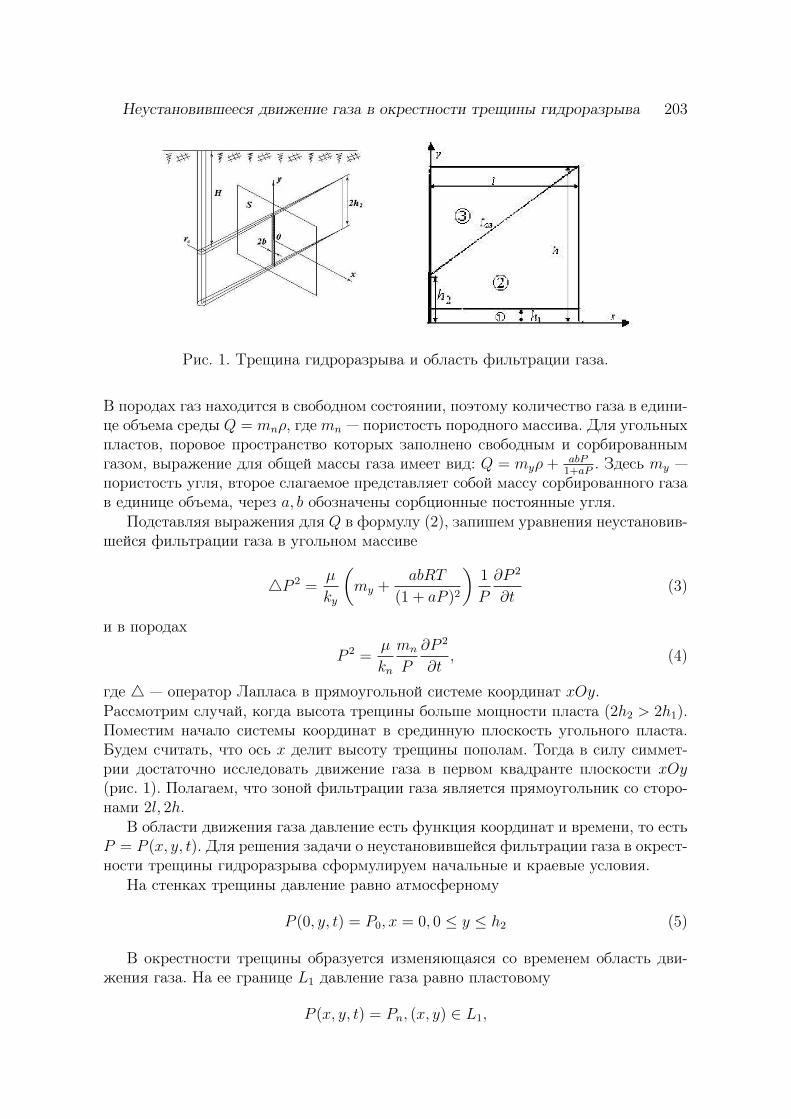
Неустановившееся движение газа в окрестности трещины гидроразрыва 203
Рис. 1. Трещина гидроразрыва и область фильтрации газа.
В породах газ находится в свободном состоянии, поэтому количество газа в едини-це объема среды Q = mnρ, где mn — пористость породного массива. Для угольныхпластов, поровое пространство которых заполнено свободным и сорбированнымгазом, выражение для общей массы газа имеет вид: Q = myρ + abP
1+aP. Здесь my —
пористость угля, второе слагаемое представляет собой массу сорбированного газав единице объема, через a, b обозначены сорбционные постоянные угля.
Подставляя выражения для Q в формулу (2), запишем уравнения неустановив-шейся фильтрации газа в угольном массиве
4P 2 =µ
ky
(my +
abRT
(1 + aP )2
)1
P
∂P 2
∂t(3)
и в породах
P 2 =µ
kn
mn
P
∂P 2
∂t, (4)
где 4 — оператор Лапласа в прямоугольной системе координат xOy.Рассмотрим случай, когда высота трещины больше мощности пласта (2h2 > 2h1).Поместим начало системы координат в срединную плоскость угольного пласта.Будем считать, что ось x делит высоту трещины пополам. Тогда в силу симмет-рии достаточно исследовать движение газа в первом квадранте плоскости xOy(рис. 1). Полагаем, что зоной фильтрации газа является прямоугольник со сторо-нами 2l, 2h.
В области движения газа давление есть функция координат и времени, то естьP = P (x, y, t). Для решения задачи о неустановившейся фильтрации газа в окрест-ности трещины гидроразрыва сформулируем начальные и краевые условия.
На стенках трещины давление равно атмосферному
P (0, y, t) = P0, x = 0, 0 ≤ y ≤ h2 (5)
В окрестности трещины образуется изменяющаяся со временем область дви-жения газа. На ее границе L1 давление газа равно пластовому
P (x, y, t) = Pn, (x, y) ∈ L1,

204 Хапилова Н.С., Залётов В.В.
L1 = (0 < x < l(t), y = h(t))⋃
(x = l(t), 0 < y < h(t)) (6)
На осях координат в силу симметрии движения газа имеем
∂P
∂y= 0, 0 < x < l(t), y = 0;
∂P
∂x= 0, x = 0, h2 < y < h(t). (7)
В начальный момент t = 0 полагаем
P (x, y, 0) = Pn (8)
Для определения неизвестной границы L1 используем кинематическое условие
ν|(x,y)∈L1 = −dL1
dt(9)
Дифференциальное уравнение (9) решается с начальным условием: граница L1
при t = 0 совпадает с контуром трещины, то есть
L1(x, y, 0) = L1(0, 0 ≤ y ≤ h2, 0) (10)
Разобьем область фильтрации газа на зоны: 1 — угольный пласт, 2 и 3 — породывблизи и выше трещины (рис. 1). Уравнение границы L23, разделяющей вторую итретью зоны, будет получено в ходе решения задачи.
Введем функцию Φ(P )
Φ(P ) =
Φyzone1Φnzone2,3 (11)
где
Φy =µ
ky
(my +
abRT
(1 + aP )2
)1
P, Φn =
µ
kn
mn
P. (12)
Тогда соотношения (3), (4) могут быть записаны в виде
∂2P 2
∂x2+
∂2P 2
∂y2= Φ(P )
∂P 2
∂t(13)
На границе между зонами 2 и 3 давление должно быть непрерывно, то есть
P2 = P3, (x, y) ∈ L23 (14)
Нелинейное уравнение (13) будем решать методом последовательных приближе-ний. В качестве нулевого приближения положим давление равным пластовомудавлению. Подставляя в функцию Φ(P ) значение P = Pn, получим линейное урав-нение, которое может быть решено методом разделения переменных. Найденнаятаким образом величина P (первое приближение) опять подставляется в функ-цию Φ(P ) и из решения линейного уравнения находится второе приближение длядавления.
Решение уравнения (13), в первом приближении имеет следующий вид:в зоне 2
P 2 = P 20 +
P 2n − P 2
0
lx +
2(P 2n − P 2
0 )
π
∞∑m=1
1
msin
mπx
le−m2π2t
l2B20 , (15)
Неустановившееся движение газа в окрестности трещины гидроразрыва 205
в зоне 3
P 2 = P 20 +
P 2n − P 2
0
h− h2
(y − h2) +∞∑
m=1
sinmπ(y − h2)
h− h2
e− m2π2t
(h−h2)2B20 (16)
гдеB2
0 = Φ(P ) =µmn
knP
Легко заметить, что давления, определяемые правыми частями формул (15), (16),совпадают в точках прямой
x
l=
y − h2
h− h2
при l = h − h2. Используя соотношение, связывающее величины l и h, запишемуравнение линии L23, разделяющей зоны 2 и 3, в виде
y = x + h2
Граница области движения газа находится из решения уравнения (9) с начальны-ми условиями (10). В зоне 2 имеем
νx|x=l = −kn
µ
∂P
∂x|x=l (17)
где P определяется формулой (15).Подставив (17) в (19), получим громоздкое дифференциальное уравнение с
неразделяющимися переменными
dl
dt=
kn
2µPn
P 2n − P 2
0
l
[1 + 2
∞∑m=1
(−1)me−m2π2t
l2B20
]. (18)
Расчеты показывают, что третье слагаемое в формуле (15) мало по сравнению ссуммой первых двух. Пренебрегая им в выражении для P 2,найдем приближеннуюформулу
l(t) =
√kn
µ
P 2n − P 2
0
Pn
t (19)
Таким образом, в зоне 2 прямолинейная граница L1 в произвольный момент вре-мени задается формулой
L1(x, y, t) = L1(x = l(t), y ∈ (h1, l(t) + h2)). (20)
Проведя аналогичные выкладки для определения границы в зоне 3, получим
L1(x, y, t) = L1(x ∈ (0, l(t)), y = l(t) + h2), (21)
где l(t) определяется формулой (19).Распределение давления газа в зоне 1 (рис.1) рассчитывается по формуле
P 2 = P 20 +
P 2n − P 2
0
lyx +
2(P 2n − P 2
0 )
π
∞∑m=1
1
msin
mπx
lye−m2π2t
l2yB21 (22)

206 Хапилова Н.С., Залётов В.В.
где
B21 =
µ
ky
[my +
abRT
(1 + aP )2
]1
P(23)
Интегрирование приближенного уравнения для скорости движения границы де-газации в угольном пласте позволяет найти в явном виде зависимость протяжен-ности области движения газа от времени
ly(t) =
√ky(P 2
n − P 20 )t
µPn
(24)
Проницаемость пород намного больше, чем угля, поэтому область дегазации уве-личивается в породах быстрее, чем в угле. В результате отставания фронта дега-зации в угле на контакте пласта с породами образуется участок, через который газбудет перемещаться из угля в породы. При этом в окрестности трещины создаетсяновая зона, в которой форма границы и ее зависимость от времени могут бытьопределены численными методами с учетом условия непрерывности давления внекотором переходном слое между зонами 1 и 2.
Из численного анализа формул (15)–(24) следует, что с ростом пластового дав-ления область движения газа вблизи трещины гидроразрыва увеличивается, гра-ница зоны дегазации в породах перемещается значительно быстрее, чем в уголь-ном пласте, процесс десорбции метана практически не влияет на распределениедавления газа в окрестности трещины.
Список литературы[1] Gringarten A.C., Ramey H.J.Jr., Raghavan R. Unsteady-state pressure distributions
created by a well with a single infinite-conductivity vertical fracture. // Soc. Petrol.Eng. Journal. 1974. V. 14. 4. P. 347–360.
[2] Triab D. Analysis of pressure and pressure derivative without type-curve matching:Vertically fractured wells in closed systems. //J. Petrol. Science and Eng. 1994. V. 11.P. 323–333.
[3] Полубаринова-Кочина П.Я.О неустановившейся фильтрации газа в угольном пласте// ПММ. 1953. Т. 17. 6. С. 735–738.
Khapilova N.S., Zaletov V.V. Unsteady motion of gas near a crack of hydrorupture.Analytical solution of the problem about unstationary methane filtration near vertical crack,created in a rock-coal massif, was obtained. The formulas for analysis of gas pressuredistribution near a hydrorupture crack were constructed. The displacement of the boundaryof filtration domain in a rocks and coal seam was researched.

АНАЛИТИЧЕСКИЕ МЕТОДЫ В КОНТАКТНОЙ ЗАДАЧЕ ДЛЯДВОЙНОГО СФЕРИЧЕСКОГО СЛОЯ
Чебаков М.И.∗, Иваночкин П. Г.∗∗, Кармазин П.А.∗∗∗ Южный федеральный университет, Ростов-на-Дону
∗∗ Ростовский государственный университет путей сообщения
Рассматривается осесимметричная контактная задача теории упругости о взаимо-действии абсолютно жесткого шара (штампа) с внутренней поверхностью сферическогооснования, состоящего из двух сферических слоев с различными упругими постоянны-ми. Внешняя поверхность основания закреплена, слои между собой жестко соединены,в зоне контакта отсутствуют силы трения. Для поставленной задачи теории упруго-сти впервые построено интегральное уравнение, изучены его некоторые свойства. Длярешения интегрального уравнения использованы два метода: прямой метод коллокаций,который позволяет получить достаточно точное решение задачи практически при любыхзначениях параметров с небольшими затратами времени современных компьютеров, иасимптотический метод, который дает простое аналитическое решение для относительномалых толщин слоев. Произведен расчет распределения контактных напряжений, разме-ров области контакта и перемещения штампа для разных значений исходных параметров.Определена область значений параметров задачи, при которых асимптотический методдает приемлемое решение и которая, в основном, охватывает геометрические размеры имеханические свойства реальных самосмазывающихся подшипников скольжения.
1 Постановка задачи теории упругостиВ сферических координатах (r, θ, ϕ) рассмотрим два сферических слоя
R1 ≤ r ≤ R2 (слой 1) и R2 ≤ r ≤ R3 (слой 2) c различными упругими посто-янными Gi — модуль сдвига, νi — коэффициент Пуассона (i — номер слоя) ижестко соединенных по сферической поверхности r = R2. Пусть поверхностьr = R3 неподвижна, а в поверхность r = R1 вдавливается силой P штамп в формешара радиуса R0 = R1 − ∆ с точкой первоначального касания r = R1, ϕ = 0.Предполагаем, что трение между штампом и сферическим слоем отсутствует,сила P направлена вдоль прямой ϕ = 0, а величина ∆ мала (см. рис. 1). В этомслучае приходим к решению осесимметричной краевой задачи для уравненийЛяме в сферических координатах со следующими граничными условиями
u(1)r = (δ + ∆) cos ϕ−∆, τ (1)
rϕ = 0 (r = R1, |ϕ| ≤ γ), (1)
σ(1)r = 0, τ (1)
r,ϕ = 0 (r = R1, |ϕ| > γ), (2)
u(2)r = u(2)
ϕ = 0 (r = R3), (3)
u(1)r = u(2)
r , u(1)ϕ = u(2)
ϕ , τ (1)r,ϕ = τ (2)
r,ϕ , σ(1)r = σ(2)
r (r = R2), (4)
где δ — смещение штампа, ur — перемещение вдоль оси r, σr, τrϕ — компонентытензора напряжений, ϕ ≤ γ — область контакта.

208 Чебаков М.И., Иваночкин П.Г., Кармазин П.А.
RR
R
P
0
1
2
d+D
R3
Рис. 1.
Разыскивая решение уравнений Ляме в виде разложений по полиномам Ле-жандра, приходим к парному ряду-уравнению
∞∑
k=0
akK(αk)Pk(cos ϕ) = f(ϕ) (0 ≤ ϕ ≤ γ)
∞∑
k=0
akPk(cos ϕ) = 0 (γ < ϕ < π), (5)
f(ϕ) =G1
R1(1− ν1)((δ + ∆) cos ϕ−∆), αk = k +
1
2. (6)
Неизвестные контактные напряжения под штампом σr(R1, ϕ) = q(ϕ) определя-ются через решение парного ряда-уравнения (5) из соотношения
q(ϕ) =∞∑
k=0
akPk(cos ϕ). (7)
В парном уравнении (5) функция K(u) получена с использованием программыаналитических вычислений MAPLE, она имеет довольно громоздкую структура ипоэтому не представляется возможным полностью привести ее здесь, но основныеее свойства изучены, например, K(u) представимы в виде
K(u) =K1(u)
K2(u)
Ki(u) = G2ηi2(u) + Gηi1(u) + ηi0(u), (8)
Аналитические методы в контактной задаче для двойного сферического слоя 209
где G = G2/G1, а найденные функции ηij(u) содержат степенные и экспоненци-альные функции, зависят только от коэффициентов Пуассона материала слоев иотношения радиусов r2 = R2/R1, r3 = R3/R1. Показано, что
K(u) = 1/u + O(1/u2) (u →∞), K(0) = A = const, (9)
2 Решение парного уравнения. Асимптотическийметод
В реальных самосмазывающихся подшипниках скольжения толщина слоев ма-ла по сравнению с их радиусом, поэтому относительные радиусы r2 и r3 близкик единице. В этом случае, как показываю расчеты, A является малой величиной(A ¿ 1) и поэтому асимптотическое решение парного ряда-уравнения (5) прималых A может быть получено на основе подхода, изложенного в [1]. Не останав-ливаясь подробно на изложении этого подхода, отметим только, что идея мето-да основана на сведении парных рядов-уравнений к бесконечной системе линей-ных алгебраических уравнений первого рода с сингулярной матрицей и полученияее асимптотического решения при малых A после аппроксимации функции K(u)функцией
K∗(u) = u−1 th Au. (10)
Максимальная относительная погрешность такой аппроксимации, например, приG = 1, ν1 = ν2 = 0.3, r2 = 1.1 и r3 = 1.4 не превосходит 8.4%, с увеличением Gи уменьшением r2 и r3 погрешность аппроксимации будет уменьшаться. Однакопри этом полученное асимптотическое решение будет иметь значительно меньшуюпогрешность [1].
3 Метод коллокацийПарное интегральное уравнение эквивалентно интегральному уравнению (ИУ)
∫ γ
0
q(α)[k0(α, ϕ) + k1(α, ϕ)]dα = f(ϕ) (0 ≤ ϕ ≤ γ). (11)
k0(α, ϕ) = sin α
∞∑
k=0
Pk(cos α)Pk(cos ϕ),
k1(α, ϕ) = sin α
∞∑
k=0
αk
[K(αk)− 1
u
]Pk(cos α)Pk(cos ϕ). (12)
Первое слагаемое ядра ИУ может быть представлено в виде (K(k) — полныйэллиптический интеграл)
k0(α, ϕ) =
√2 sin α
π√
1− cos(α + ϕ)K
(√2 sin α sin ϕ
1− cos(α + ϕ)
), (13)

210 Чебаков М.И., Иваночкин П.Г., Кармазин П.А.
что позволяет выделить в явном виде главную часть ядра в виде логарифма
k0(α, ϕ) ∼ − 1
πln |α− ϕ| (α → ϕ) (14)
и использовать для решения ИУ прямой метод коллокаций [2, 3].На основе полученных соотношений проведены числовые расчеты распределе-
ния контактных напряжений, размеров области контакта и перемещения штампадля разных значений исходных параметров. Определена область значений пара-метров задачи, при которых асимптотический метод дает приемлемое решение икоторая, в основном, охватывает геометрические размеры и механические свой-ства реальных самосмазывающихся подшипников скольжения. Для относительнотонких слоев получено достаточно хорошее совпадение результатов расчетов, по-лученных с помощью обоих методов.
Работа выполнена при частичной финансовой поддержке РФФИ (грант 06-08-01257)
Список литературы[1] Александров В.М., Чебаков М.И. Аналитические методы в контактных задачах тео-
рии упругости. М.: Физматлит, 2004. 304 с.
[2] Воронин В.В., Цецехо В.А. Численное решение интегрального уравнения 1-го рода слогарифмической особенностью методом интерполяции и коллокации// Ж. вычисл.матем. и матем. физики. 1981. Т. 21. 1. С. 40–53.
[3] Иваночкин П.Г., Колесников В.И., Флек Б.Н., Чебаков М.И. Контактная прочностьдвухслойного покрытия при наличии сил трения в области контакта// Изв. РАН,МТТ. 2007. 1. C. 183–192.
Chebakov M.I., Ivanochkin P.G., Karmazin P.F. Analytical method for contactproblem for double spherical layer . The axesymmetrical contact problem of the elasticitytheory about interaction of an absolutely rigid ball (stamp) with an internal surface of thespherical basis is considered. The basis consists of two spherical layers with various elasticconstant. The external surface of the basis is fixed, the layers are among themselves rigidlyconnected, in a zone of contact there are no friction forces. For the problem the integralequation for the first time are constructed. The solution is received with use asymptoticmethod and method of collocations. The calculation of distribution of contact stresses, para-meters of contact area and stamp moving for different values of initial parameters is made.

ТРЕХМЕРНЫЕ СОЛИТОНЫ В СТЕКАЮЩЕЙ ПЛЕНКЕЖИДКОСТИ
Шапарь С.М.Кубанский государственный университет, Краснодар
Нелинейные устойчивые локализованные когерентные структуры, солитоны, играютключевую роль в стохастизации процессов в активно-диссипативных средах. В рабо-те исследуются многогорбые трехмерные солитоны модельного уравнения, качественноописывающего волновые процессы в ряде физических систем. Численно показано суще-ствование многогорбых трехмерных солитонов и исследовано их поведение. Результатыработы распространены на описание многогорбых солитонов в стекающих слоях вязкойжидкости [1]. Количественно объяснено необычное физическое явление, наблюдаемое вэкспериментах [1] — устойчивые двугорбые когерентные структуры на поверхности сте-кающего вязкого слоя.
1. Слабонелинейные трехмерные волны в средах с дисперсией, диссипацией иподкачкой энергии описываются модельным уравнением [2,3]
∂H
∂τ+ 4H
∂H
∂ξ+
∂2H
∂ξ2+ m
∂
∂x∇2H +∇4H = 0 (1)
где ∇2 ≡ ∂2/∂ξ2 + ∂2/∂ζ2, m — параметр, характеризующий дисперсию, член совторой производной ответственен за подкачку энергии, член с бигармоническимоператором отвечает за диссипацию, нелинейный член передает энергию вверх поспектру. Решение (1) типа стационарной бегущей локализованной в пространствеволны, так называемый подковообразный солитон, впервые построено Цвелоду-бом в [3] для важного случая m = 0, при m = 0 (1) описывает волновые процессыв стекающем слое вязкой жидкости для очень малых чисел Рейнольдса, Re → 0.При m → ∞ (1) переходит в одно из обобщений уравнения КдВ на трехмер-ный случай. Это уравнение, кроме волн в стекающих вязких слоях, качественноописывает ряд физических процессов: уединенные волны в плазме, волны Россби,сегрегацию магмы в земной мантии, локализованные волны в жидких кристаллах.
Решение уравнения (1) при m = 0 было численно продолжено по параметру mметодом [4]. Решение искалось в виде стационарной бегущей волны, затухающейна бесконечности:
∂
∂τ= −C
∂
∂ξ, H → 0 при ξ2 + ζ2 →∞ (2)
2. Система Капицы – Шкадова [5], описывающая трехмерные волновые про-цессы в вертикально стекающих вязких слоях для умеренных чисел Рейнольдсадля стационарных бегущих со скоростью c волн имеет вид:
−c∂q
∂x+
6
5
∂
∂x
(q2
h
)+
6
5
∂
∂z
(qp
h
)=
1
5δ
[h∂K
∂x+ h− q
h2
]

212 Шапарь С.М.
−c∂p
∂x+
6
5
∂
∂x
(qp
h
)+
6
5
∂
∂z
(p2
h
)=
1
5δ
[h∂K
∂z− p
h2
](3)
−c∂h
∂x+
∂q
∂x+
∂p
∂z= 0
с краевыми условиями для волн типа солитонов q, h → 1, p → 0 при x2 + z2 →∞.Здесь K = ∂2h/∂x2 + ∂2h/∂z2, слой стекает вдоль оси x, совпадающей с на-правлением действия силы тяжести, h — толщина слоя, q и p — расходы жид-
кости в направлениях x и z, δ =Re11/9
37/95γ1/3— модифицированное число Рейнольдса,
γ = σρ−1ν−4/3g−1/3 — число Капицы, Re =gh3
0
3ν2 — число Рейнольдса, σ — коэффи-циент поверхностного натяжения, ρ — плотность жидкости, ν — ее кинематическаявязкость, g — ускорение силы тяжести.
При δ → 0 решение (3) асимптотически переходит в (1)–(2) при m = 0, причем
h ∼ 1 + ε3H(ξ, ζ), q ∼ 1 + ε3Q1(ξ, ζ) + ε6Q2(ξ, ζ),
p ∼ ε6P (ξ, ζ), ξ = εx, ζ = εz, c = 3 + ε3C,
где ε =√
15δ. Решение (3) типа одногорбого солитона было получено в [4]. В на-стоящей работе многогорбые решения (1)–(2) при m = 0 были рассмотрены какпредельный случай системы (3) при δ → 0 и продолжены па параметру в сторонуконечных δ; применялся численный метод [4]. При δ = 0.03 скорость и макси-мальное отклонение от жесткой стенки для одногорбого солитона соответственноравны c = 3.262, hmax = 1.147, а для двугорбого c = 3.250, hmax = 1.131.
В работе [1] экспериментально исследованы трехмерные локализованныеструктуры в вертикально стекающих пленках вязкой жидкости. В качестверабочей жидкости использовался спиртовой раствор плотностью ρ = 931 кг/м3,кинематической вязкостью ν = 2.7 × 10−6 м2/сек, поверхностным натяжениемσ = 0.03 кг/с2, γ = 404. В работе, в частности, было обнаружено необычноефизическое явление — двугорбые трехмерные солитоны, существование которыхподтверждено нашей теорией. На рис. 1 показано сравнение профилей экспе-риментально полученного трехмерного двугорбого солитона с теоретическим,Re = 2.2, что в пересчете дает δ = 0.03. Экспериментальные скорость и ам-плитуда волны соответственно c = 102 мм/сек, a = 0.03 мм; теоретические —c = 113 мм/сек, a = 0.025 мм. Теория не только качественно подтверждаетсуществование многогорбых трехмерных солитонов, но и дает характеристикидвугорбого трехмерного солитона количественно соответствующие эксперименту.
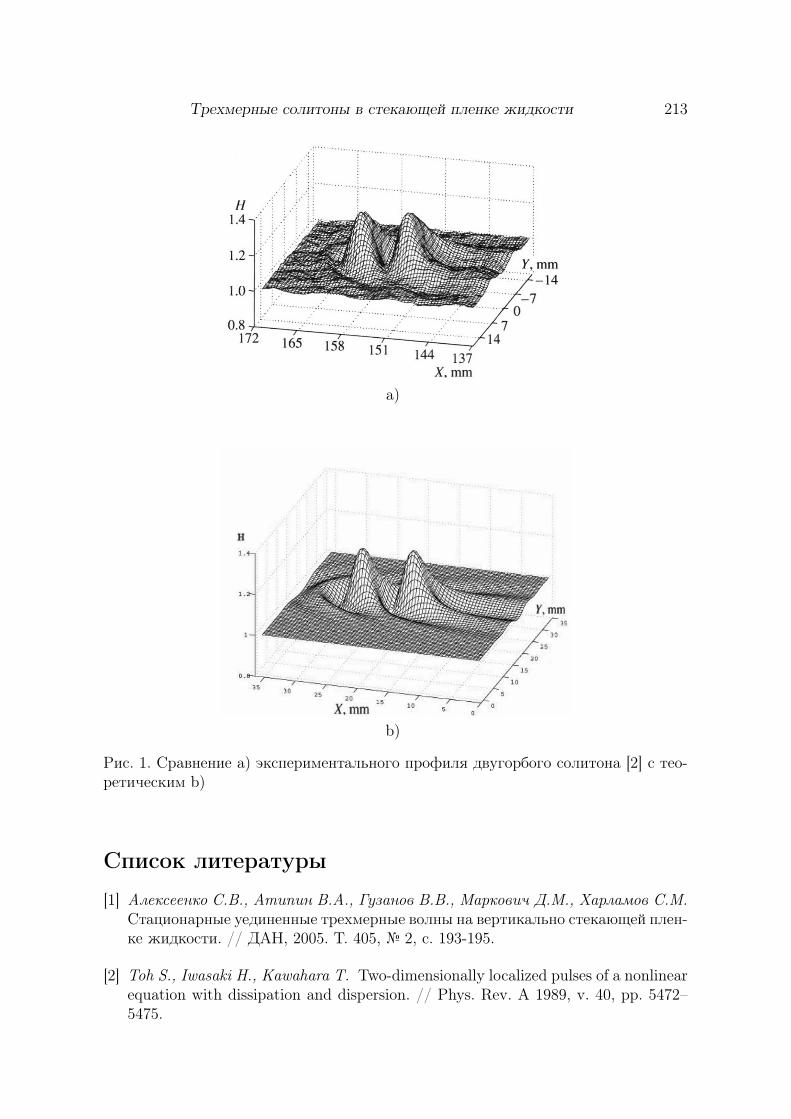
Трехмерные солитоны в стекающей пленке жидкости 213
a)
b)
Рис. 1. Сравнение а) экспериментального профиля двугорбого солитона [2] с тео-ретическим b)
Список литературы
[1] Алексеенко С.В., Атипин В.А., Гузанов В.В., Маркович Д.М., Харламов С.М.Стационарные уединенные трехмерные волны на вертикально стекающей плен-ке жидкости. // ДАН, 2005. Т. 405, 2, с. 193-195.
[2] Toh S., Iwasaki H., Kawahara T. Two-dimensionally localized pulses of a nonlinearequation with dissipation and dispersion. // Phys. Rev. A 1989, v. 40, pp. 5472–5475.
214 Шапарь С.М.
[3] Петвиашвили В.И., Цвелодуб О.Ю. Подковообразные солитоны на стекающейвязкой пленке жидкости. // ДАН, 1978, т. 238, 6, с. 1321–1323.
[4] Калайдин Е.Н., Власкин С.Ю., Демехин Е.А., Каллиадасис С. О трехмерныхсолитонах в стекающей пленке жидкости. // ДАН, 2006, т. 406, 1, с. 44–47.
[5] Шкадов В.Я. Волновые режимы течения тонкого слоя вязкой жидкости поддействием силы тяжести. // Изв. АН СССР, МЖГ, 1967, 1. С. 43–51.
Shapar S.M. Three-dimensional solitons in a falling liquid film. Nonlinear stable localizedcoherent structures, solitons, plays a key role in stochastization of process in active-dissipativemedium. Multi-hump three-dimensional solitons of model equation are researched in presentwork, which is describes in high-quality wave process in various physical systems. It isnumerically shown the existence of multi-hump three-dimensional solitons and investigatedtheir behavior. The results of the work applied to description of multi-hump solitons infalling liquid viscous films. In high-quality described unusual physical effect, observed in expe-riments — stable two-hump coherent structures on the surface of falling viscous layer.

ВЛИЯНИЕ ВНУТРЕННЕГО ДАВЛЕНИЯ НА УСТОЙЧИВОСТЬРАСТЯНУТОЙ ТРУБЫ ИЗ МИКРОПОЛЯРНОГО МАТЕРИАЛА
Шейдаков Д.Н.Южный научный центр РАН, Ростов-на-Дону
Настоящая работа посвящена изучению влияния внутреннего давления на потерюустойчивости растянутой упругой цилиндрической трубы из микрополярного матери-ала [1]–[4]. Проблема исследуется с помощью трехмерных нелинейных уравнений мо-ментной теории упругости. Анализ устойчивости проводится в рамках бифуркационно-го подхода. Для физически линейного микрополярного материала найдены критическиекривые и построены области устойчивости в плоскости параметров нагружения. Иссле-довано влияние значений физических параметров материала и геометрических размеровтрубы на потерю устойчивости.
1. Смещение частиц тела при растяжении и раздувании упругой трубы опре-деляется следующими соотношениями [6]
R = f(r), Φ = ϕ, Z = α z; α = const (1)
r1 6 r 6 r0, 0 6 ϕ 6 2π, 0 6 z 6 l
Здесь r, ϕ, z — цилиндрические координаты в отсчетной конфигурации (лагран-жевы координаты), R, Φ, Z — эйлеровы цилиндрические координаты, α — коэф-фициент растяжения по оси цилиндра, f(r) — некоторая функция, характеризу-ющая радиальную деформацию трубы и определяемая из уравнений равновесияи граничных условий, r1, r0, l — внутренний и внешний радиус и длина недефор-мированной трубы.
Пусть собственно ортогональный тензор микроповорота H, который характе-ризует поворот частиц тела для микрополярной среды, равен
H = ereR + eϕeΦ + ezeZ (2)
где er, eϕ, ez и eR, eΦ, eZ — ортонормированные векторные базисы лагранже-вых и эйлеровых цилиндрических координат, соответственно. В этом случае тен-зор изгибной деформации L равен нулю
L× E = − o
∇H ·HT = 0
а выражение меры деформации Y имеет вид
Y = C ·HT = f ′ (r) erer +f (r)
reϕeϕ + α ezez (3)
Здесь C — градиент деформации,o
∇ — набла-оператор в отсчетной конфигурации,E — единичный тензор. Штрихом обозначена производная по r.

216 Шейдаков Д.Н.
Будем считать, что упругие свойства трубы описываются моделью физическилинейного микрополярного материала [1, 4], удельная потенциальная энергия де-формации которого задается соотношением
W (Y,L) =1
2λ tr2 (Y − E) +
1
2µ tr
((Y − E) · (Y − E)T
)+
1
2ν tr (Y − E)2 +
+1
2γ1 tr2L +
1
2γ2 tr
(L · LT
)+
1
2γ3 trL2
µ, γ2 > 0, λ + µ + ν > 0, γ1 + γ2 + γ3 > 0
(4)
Тогда, в случае деформации (1), (2), тензор моментных напряжений G равен нулю,а тензор напряжений типа Пиолы D равен
D =∂W (Y,L)
∂Y·H = D1ereR + D2eϕeΦ + D3ezeZ
D1 = (λs1 + [µ + ν] (f ′ (r)− 1)) , D2 =
(λs1 + [µ + ν]
(f (r)
r− 1
))
D3 = (λs1 + [µ + ν] (α− 1)) , s1 = f ′ (r) +f (r)
r+ α− 3
(5)
Уравнения равновесия микрополярной среды имеют вид [2]–[5]:
o
∇ ·D = 0,o
∇ ·G +(CT ·D)
× = 0 (6)
Здесь и далее символ × означает векторный инвариант тензора второго ранга.Внешняя боковая поверхность трубы свободна от нагрузок, а к внутренней
приложено давление p, рассчитанное на единицу площади в начальном деформи-рованном состоянии. Используя формулу преобразования элементарной площадкипри переходе от отсчетной конфигурации к текущей [6], запишем граничные усло-вия на боковых поверхностях трубы:
er ·D|r=r1= −pJer ·C−T = −α pf (r1)
r1
eR; J = detC
er ·D|r=r0= er ·G
∣∣r=r1,r0
= 0
(7)
Из уравнений (6) и граничных условий (7) находим неизвестную функцию f (r):
f(r) = c1r − c2
r
c1 =(λ [3− α] + µ + ν) [(µ + ν) r2
1 + (αp− µ− ν) r20]
(µ + ν) (2λ + µ + ν + αp) r21 + (2λ + µ + ν) (αp− µ− ν) r2
0
c2 =(λ [3− α] + µ + ν) α pr2
0r21
(µ + ν) (2λ + µ + ν + αp) r21 + (2λ + µ + ν) (αp− µ− ν) r2
0
(8)

Влияние внутреннего давления на устойчивость растянутой трубы 217
Продольная сила F , действующая на торцах трубы, будет функцией парамет-ров деформации α и p, определяемой формулой
F = 2π
r0∫
r1
(ez ·D · eZ) rdr = π(r20 − r2
1
)(2λ (c1 − 1) + [λ + µ + ν] (α− 1)) (9)
2. Рассмотрим малое возмущение начального деформированного состояния,описанного выше. Линейные части приращений различных величин, характеризу-ющих возмущенное состояние равновесия, будем обозначать точкой. Справедливыследующие формулы [4]:
C• =o
∇v, H• = −H× ω, Y• =( o
∇v + C× ω)·HT
L• =o
∇ω ·HT, v = vReR + vΦeΦ + vZeZ , ω = ωReR + ωΦeΦ + ωZeZ
(10)
Здесь v — вектор добавочного перемещения, ω — линейный вектор добавочногомикроповорота.
Линеаризованные уравнения равновесия микрополярной среды [4] имеют вид
o
∇ ·D• = 0,o
∇ ·G• +[ o
∇vT ·D + CT ·D•]×
= 0 (11)
где D• и G• — линеаризованные тензоры напряжений и моментных напряженийтипа Пиолы.
Краевые условия на боковой поверхности трубы получаются в результате ли-неаризации граничных условий (7)
er ·D•|r=r1= −pJer ·C−T · (E∇ · v −∇vT
)
er ·D•|r=r0= er ·G•∣∣
r=r1,r0= 0
(12)
Здесь ∇ = C−1 · o
∇ — набла-оператор в начальном деформированном состоянии.Будем считать, что на торцах трубы отсутствуют силы трения и задано посто-
янное нормальное перемещение:
ez ·D• · eR|z=0,l = ez ·D• · eΦ|z=0,l = vZ |z=0,l = 0
ez ·G• · eZ |z=0,l = ωR|z=0,l = ωΦ|z=0,l = 0(13)
Выражения (11) представляют собой систему шести уравнений в частных про-изводных относительно компонент векторов возмущений vR, vΦ, vZ , ωR, ωΦ, ωZ . Ре-шение вида
vR = VR (r) cos nϕ cos βz, vΦ = VΦ (r) sin nϕ cos βz
vZ = VZ (r) cos nϕ sin βz, ωR = ΩR (r) sin nϕ sin βz
ωΦ = ΩΦ (r) cos nϕ sin βz, ωZ = ΩZ (r) sin nϕ cos βz
β = πm/l, m = 1, 2, ..., n = 0, 1, ...
(14)
приводит к отделению переменных ϕ, z и позволяет удовлетворить граничнымусловиям (13).
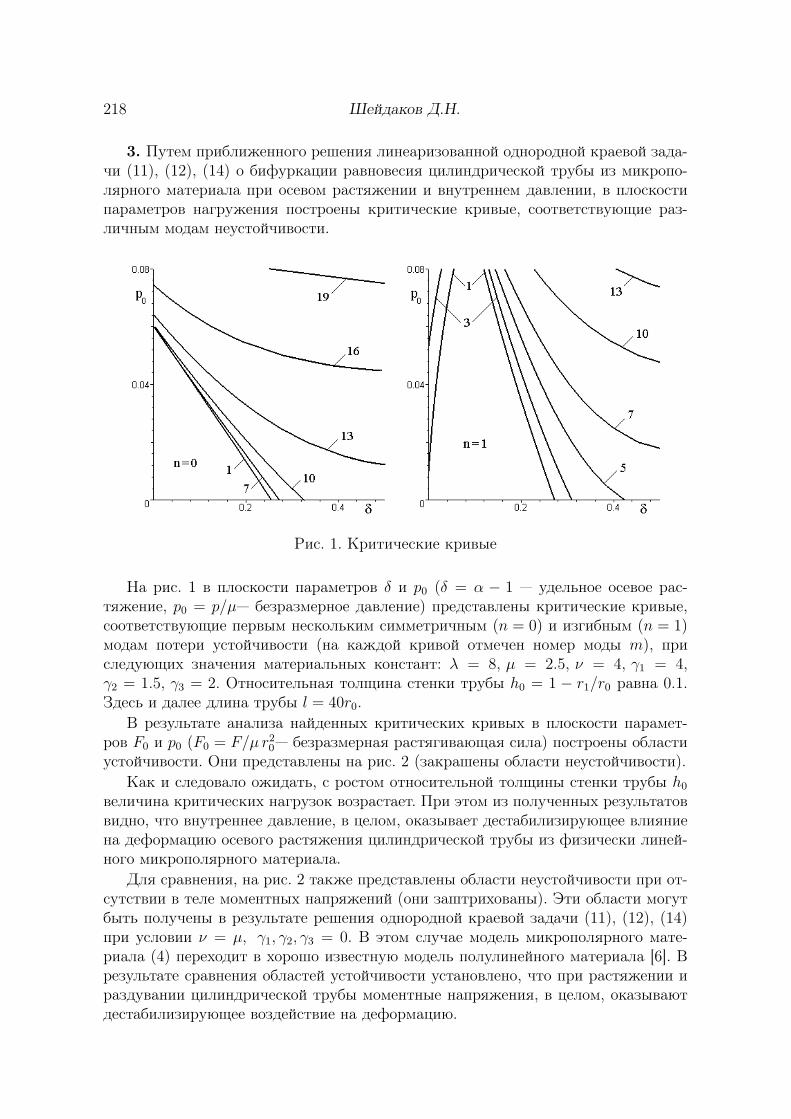
218 Шейдаков Д.Н.
3. Путем приближенного решения линеаризованной однородной краевой зада-чи (11), (12), (14) о бифуркации равновесия цилиндрической трубы из микропо-лярного материала при осевом растяжении и внутреннем давлении, в плоскостипараметров нагружения построены критические кривые, соответствующие раз-личным модам неустойчивости.
Рис. 1. Критические кривые
На рис. 1 в плоскости параметров δ и p0 (δ = α − 1 — удельное осевое рас-тяжение, p0 = p/µ— безразмерное давление) представлены критические кривые,соответствующие первым нескольким симметричным (n = 0) и изгибным (n = 1)модам потери устойчивости (на каждой кривой отмечен номер моды m), приследующих значения материальных констант: λ = 8, µ = 2.5, ν = 4, γ1 = 4,γ2 = 1.5, γ3 = 2. Относительная толщина стенки трубы h0 = 1 − r1/r0 равна 0.1.Здесь и далее длина трубы l = 40r0.
В результате анализа найденных критических кривых в плоскости парамет-ров F0 и p0 (F0 = F/µ r2
0— безразмерная растягивающая сила) построены областиустойчивости. Они представлены на рис. 2 (закрашены области неустойчивости).
Как и следовало ожидать, с ростом относительной толщины стенки трубы h0
величина критических нагрузок возрастает. При этом из полученных результатоввидно, что внутреннее давление, в целом, оказывает дестабилизирующее влияниена деформацию осевого растяжения цилиндрической трубы из физически линей-ного микрополярного материала.
Для сравнения, на рис. 2 также представлены области неустойчивости при от-сутствии в теле моментных напряжений (они заштрихованы). Эти области могутбыть получены в результате решения однородной краевой задачи (11), (12), (14)при условии ν = µ, γ1, γ2, γ3 = 0. В этом случае модель микрополярного мате-риала (4) переходит в хорошо известную модель полулинейного материала [6]. Врезультате сравнения областей устойчивости установлено, что при растяжении ираздувании цилиндрической трубы моментные напряжения, в целом, оказываютдестабилизирующее воздействие на деформацию.
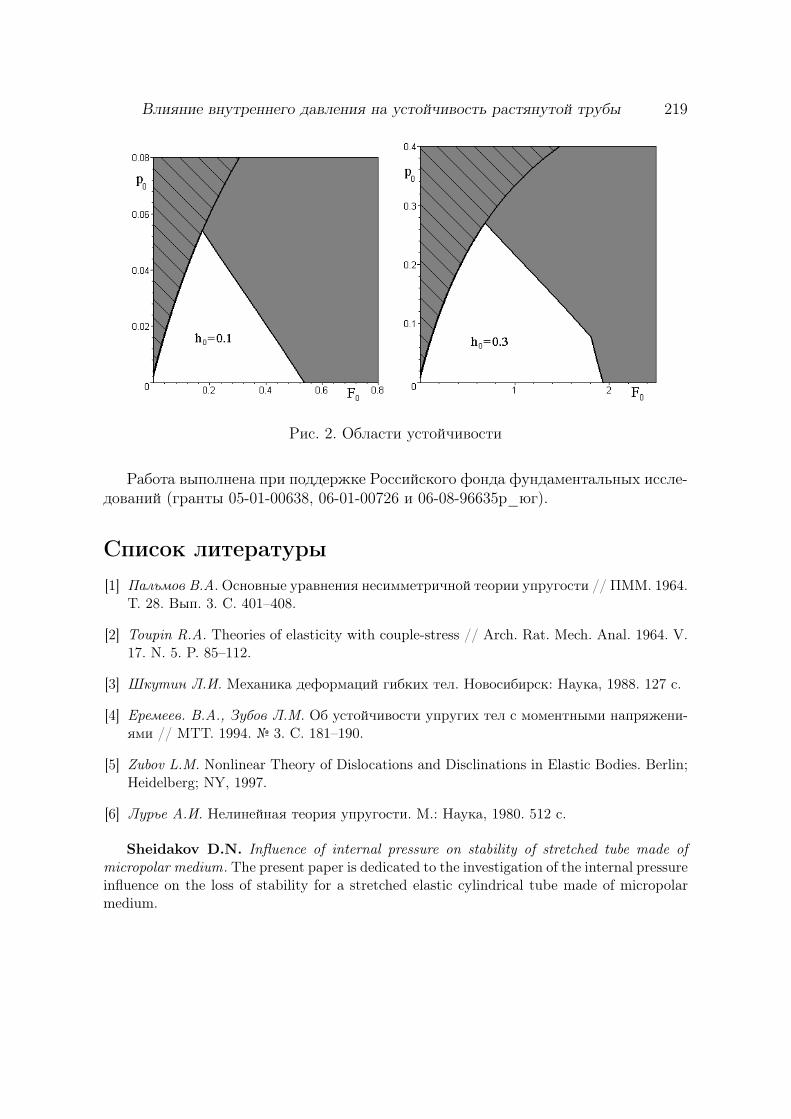
Влияние внутреннего давления на устойчивость растянутой трубы 219
Рис. 2. Области устойчивости
Работа выполнена при поддержке Российского фонда фундаментальных иссле-дований (гранты 05-01-00638, 06-01-00726 и 06-08-96635р_юг).
Список литературы[1] Пальмов В.А.Основные уравнения несимметричной теории упругости // ПММ. 1964.
Т. 28. Вып. 3. С. 401–408.
[2] Toupin R.A. Theories of elasticity with couple-stress // Arch. Rat. Mech. Anal. 1964. V.17. N. 5. P. 85–112.
[3] Шкутин Л.И. Механика деформаций гибких тел. Новосибирск: Наука, 1988. 127 с.
[4] Еремеев. В.А., Зубов Л.М. Об устойчивости упругих тел с моментными напряжени-ями // МТТ. 1994. 3. С. 181–190.
[5] Zubov L.M. Nonlinear Theory of Dislocations and Disclinations in Elastic Bodies. Berlin;Heidelberg; NY, 1997.
[6] Лурье А.И. Нелинейная теория упругости. М.: Наука, 1980. 512 с.
Sheidakov D.N. Influence of internal pressure on stability of stretched tube made ofmicropolar medium. The present paper is dedicated to the investigation of the internal pressureinfluence on the loss of stability for a stretched elastic cylindrical tube made of micropolarmedium.
ОБ ОГРАНИЧЕНИИ ТРЕНИЯ В КОЛЕСНОМ ТРАНСПОРТЕ
Шехов В.П.Ростовский государственный университет путей сообщения
Принцип движения колесного транспорта основан на использовании сил сцеплениямежду колесами и поверхностью опоры, значения которых ограничены силами трения.Это, во-первых, ограничивает ускорение движения колесного транспорта, а, во-вторых,в предельных режимах эксплуатации (юз — буксование) приводит к его дополнитель-ному износу. Здесь рассматривается возможность иного принципа движения колесноготранспорта свободного от перечисленных недостатков.
В зависимости от среды, в которой происходит движение, транспорт можноразделить на следующие виды: водный, наземный, воздушный и космический.
Силы, под действием которых происходит движение транспорта, основаны наобщей идеи отталкивания от окружающей среды. Тем не менее, среди них можновыделить, по крайней мере, два вида, используемые на современном этапе техно-логического развития преимущественно: силы T , вызываемые течением среды, исилы C сцепления.
Cилы T возникают в природе за счет перемещения воздушных и водных масс:ветры, течения рек, морские течения. Изобретение винта, турбины и реактивногодвигателя позволило создавать силы T в жидких, газообразных средах и даже ввакууме искусственно. Именно эти силы сейчас широко используются в водном,воздушном и космическом транспорте, а иногда (аэросани) и в наземном.
Достоинством двигателей, создающих силы T , является теоретическая неогра-ниченность величины их силы тяги. Но и величина сил T , возникающих в при-роде, может практически достигать колоссальных значений: штормы и цунами,ураганы и тайфуны, — и существенно превосходить силы T , создаваемые сейчасискусственно. Управление этими силами — сложная техническая задача. Эти силычаще препятствуют, чем способствуют различным видам транспорта, движущего-ся за счет сил T . Поэтому к недостаткам использования такого транспорта можноотнести его сильную зависимость от природных условий.
Силы C — силы, за счет которых перемещается большинство животных, рыби птиц, отталкиваясь от своей среды обитания. Изобретение колеса позволилоэффективно использовать эти силы в наземном транспорте. В водном транспортеиспользование сил C (весла, ласты), как и в воздушном (планер) менее успешно,чем сил T .
Преимуществом наземного транспорта, движущегося за счет сил C, являетсяего меньшая зависимость от природных условий. Конечно, мокрые или обледене-лые дороги уменьшают величину сил C, но не исключают полностью возможностьперемещение такого транспорта. Недостатком наземного транспорта, движущего-ся за счет сил C, в первую очередь является ограничение величины силы тяги, тоесть, силы сцепления.

Об ограничении трения в колесном транспорте 221
Величина сил сцепления между соприкасающимися телами, как следует иззаконов Кулона [1–2], не может превосходить своих предельных значений, назы-ваемых силами трения. Современная наука о трении трибология устанавливает,что силы трения имеют две составляющих: молекулярную и механическую [3].Механическая составляющая, зависящая от характера относительного перемеще-ния соприкасающихся тел, пропорциональна контактному давлению и фактиче-ски массе транспорта. Последнее означает, что ускорение колесного транспортанезависимо от конструкции двигателя, движущегося только за счет сил C, не мо-жет превосходить десятых долей g (ускорения свободного падения). Кроме того,при эксплуатации колесного транспорта в экстремальных режимах, когда силы Cдостигают свои предельных значения и становятся силами трения, происходитзначительное возрастание износа деталей (истирание).
Идеи законов Кулона, сформулированные для случая скольжения и приме-няемые в случае качения без проскальзывания, в рамках теоретической механи-ки [1–2] распространяются [4–7] на общий случай плоско параллельного относи-тельного движения соприкасающихся тел. Определяются условия нагружения ко-леса, при которых оно может катиться без проскальзывания.
Оказывается, что при нагружении колеса не только крутящим моментом L, нои силой тяги G: силой приложенной к оси и направленной вдоль движения коле-са, — оно может двигаться в режиме качения без проскальзывания с теоретиче-ски неограниченным ускорением (замедлением). Кроме того, подбирая различныесоотношения значений L и G, можно не только исключить работу двигателя вэкстремальных режимах, когда силы C достигают своих предельных значений истановятся силами трения, но и поддерживать режим качения без проскальзыва-ния по поверхностям с любыми механическими свойствами (например, по песку).
Эти соотношения значений L и G зависят в первую очередь от величин коэф-фициентов, характеризующих способность соприкасающихся тел сопротивлятьсясмятию и истиранию своих поверхностей, а также от размеров и инерциальныхсвойств колес и даже от загруженности колесного транспорта.
Полученные [4–7] результаты наталкивают на мысль об эффективности ис-пользования такого вида транспорта, который движется за счет синхронной ра-боты двигателей обоих типов C и T . Для создания транспорта такого (CT) виданедостаточно, например, установить турбины от самолета на электровоз. Главное вработе двигателя такого вида транспорта это выдерживание точного соотношениямежду величиной крутящего момента L, подаваемого на оси колес, и величинойсилы тяги G, создаваемой турбиной.
Создание CT транспорта возможно с помощью либо комплексного использо-вания уже существующих двигателей и современных компьютерных технологий,либо создания нового вида двигателей. Но в любом случае основным узлом такогодвигателя должно являться компьютерное устройство устанавливающее, контро-лирующее и поддерживающее точное соотношение между величиной крутящегомомента L, подаваемого на оси колес, и величиной силы тяги G, создаваемой тур-биной (или системой турбин). Требуемые и им сопутствующие соотношения при-водятся в работах [4–7].
222 Шехов В.П.
Колесный транспорт CT вида не будет иметь некоторых недостатков совре-менного колесного транспорта: во-первых, при его работе трение скольжения ис-ключено в любом режиме эксплуатации, во-вторых, этот транспорт не имеет тео-ретических ограничений ускорения. Учитывая возможности CT транспорта под-держивать режим качения без проскальзывания по поверхностям с любыми ме-ханическими свойствами, можно говорить и об увеличении его независимости отприродных условий.
При создании конкретных моделей транспорта CT вида можно освободиться иот других недостатков, присущих современному колесному транспорту. Например,при разгоне (торможении) колесного транспорта происходит перераспределениезагруженности передних и задних колес. В этом режиме движения равнодейству-ющая сил инерции, проходящая через центр масс транспорта, составляет парусил с равнодействующей сил сцепления, проходящей через точки контакта колесс поверхностью опоры. Именно действие этой пары сил и является причиной уве-личения загруженности передних колес при торможении и — задних при разгоне.
При больших ускорениях этот эффект может увеличиться до такой степени,что вызовет переворачивание движущегося транспорта. Устранение этого эффектав транспорте CT вида можно достичь, так располагая двигатели T сил, чтобылиния действия общей равнодействующей сил C и T вида проходила через центрмасс транспорта. Правда, чтобы решать одновременно обе задачи: выдерживатьточное соотношение между значениями L и G и обеспечивать прохождение линиидействия общей равнодействующей сил C и T вида через центр масс транспорта, —потребуется не один, а целая система T двигателей.
При поворотах современного колесного транспорта та же самая пара сил уве-личивает загруженность внешних колес за счет внутренних. Чтобы предотвратитьвозможное переворачивание приходится на крутых поворотах поднимать внешнийкрай (или рельс) дороги. Кроме того, из-за ограниченности сил сцепления, за счеткоторых и происходит поворот, приходится либо снижать скорость, либо увеличи-вать радиус траектории поворота. Иначе при достижении силами сцепления своихпредельных значений, равных трению скольжения, при повороте неизбежен занос.
В конкретных моделях транспорта CT вида можно устранить оба недостат-ка (перевертывание и занос), присущих колесному транспорту, движущемуся приповороте только за счет C сил, а также снять ограничения величины скорости ирадиуса кривизны траектории. Для этого достаточно, чтобы поворот в этих мо-делях транспорта осуществлялся за счет двигателей T сил, равнодействующаякоторых проходила бы через центр масс транспорта.
Итак, при эксплуатации транспорта CT вида его ускорение теоретически неограничено. Здесь на первую роль выходят физиологические ограничения. На-пример, при движении по горизонтали с ускорением g человек испытывает пере-грузку 1.44g. Подобные перегрузки происходят на цепной карусели, когда цепиоткланяются от вертикали на угол 45. Многие люди легко переносят это состо-яние несколько минут. Чтобы, двигаясь с таким ускорением, достичь скорости288 км/час, требуется время 8 секунд и расстояние 320 метров. Если тормозить сзамедлением 8g, как космонавты при экстренном спуске, то можно сбросить этускорость за одну секунду на расстоянии 40 метров.
Об ограничении трения в колесном транспорте 223
Возможно, внедрение двигателей CT вида в наземный транспорт явится каче-ственно новым шагом в его технологическом развитии.
Список литературы[1] Никитин Н.Н. Курс теоретической механики: Учеб. для машиностроит. и приборо-
строит. спец. вузов. 5-е изд. перераб. и доп. М.: Высш. шк., 1990. 607 с.: ил.
[2] Тарг С.М. Краткий курс теоретической механики: Учеб. для втузов/С.М. Тарг. 13-еизд., М.: Высш. шк., 2003. 416 с.: ил.
[3] Под ред. А.В. Чичинадзе. Основы трибологии (трение, износ, смазка) М.: Машино-строение, 2001. 664с.
[4] Шехов В.П. О законах механического трения в задачах о качении со скольжением//Тр. VI Междунар. конф. Т.2. “Современные проблемы механики сплошной среды”/ Ростов н/Д, 12–14 июня 2000 г. C. 150–153.
[5] Шехов В.П. Детализация понятия механического трения.//Изв. вузов. Сев.-Кавк.регион. Естеств. науки. 2001.,2. C. 30–32.
[6] Шехов В.П. Особенности механического трения.// Тр. Междунар. конф. “Механикаи трибология транспортных систем – 2003” / Ростов н/Д, 2003. С. 395–398.
[7] Шехов В.П. Законы Кулона при плоском движении.// Тр. X Междунар. конф.Т.2. “Современные проблемы механики сплошной среды” / Ростов н/Д, 5–9 декабря2006 г. C. 316–319.
Shehov V.P. About friction’s limitation of wheeled traffic. The principle of movement ofwheeled traffic is bases on using of cohesion between wheels and frictional forces limit support’ssurface significances of which. Firstly, it limits acceleration of wheeled traffic’s movement,secondly it brings on extra deterioration when slip. In this article we consider a possibility ofother principle of wheeled traffic’s movement, which excludes these shortcomings.
ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ НЕЛИНЕЙНЫХВТОРЫХ ГАРМОНИК ПОВЕРХНОСТНЫХ ВОЛН ЛЯВА ВВОЛНОВОДЕ С КРИСТАЛЛИЧЕСКИМИ КОМПОНЕНТАМИ
КУБИЧЕСКОЙ СИСТЕМЫ
Щербак Н.В., Сторожев В.И.Донецкий национальный университет, Украина
На основе модели геометрически и физически нелинейного деформирования анизо-тропной упругой среды кубической системы, базирующейся на представлениях упру-гого потенциала с квадратичными и кубическими членами по деформациям, а такжес использованием приема разложения функции волновых смещений в ряды по акусти-ческому числу Маха построены аналитические представления для нелинейных вторыхгармоник поверхностных волн Лява для волновода в виде полупространства из монокри-сталла кубической системы и идеально контактирующего кристаллического слоя того жекласса упругой симметрии. Проведены численно-аналитические исследования потоковмощности во вторых гармониках для волновода в виде полупространства монокристал-ла кремния, контактирующего со слоем монокристалла германия.
Введение. Вопрос о нелинейных возмущениях при распространении поверх-ностных ультраакустических волн в кристаллических структурах представляетзначительный интерес для приложений в акустоэлектронике [1] и ранее рассмат-ривался в работах [2, 3, 4]. В данной работе он рассматривается применительно кслучаю распространения волн Лява в структуре “слой монокристалла класса m3mкубической системы на полупространстве-подложке из монокристалла аналогич-ного класса кубической системы с отличающимися свойствами”.
Исследуемая волноводная структура отнесена к системе нормированных пря-моугольных координат, в которой слой занимает область V1 = −∞ < x1,x2 < ∞,−h ≤ x3 ≤ 0, а полупространство-подложка область V2 = −∞ < x1,x2 < ∞, 0 < x3 < ∞. Физико-механические свойства компоненты волновода Vp ха-рактеризуются упругими постоянными первого порядка c
(p)ij , второго порядка c
(p)ijk
и плотностью ρ(p). Для анализа нелинейных ангармонических эффектов при рас-пространении волн Лява вдоль координатного направления OX1, коллинеарногоупруго-эквивалентным направлениям кристаллических материалов слоя и полу-пространства, используется модель физически и геометрически нелинейного де-формирования упругого монокристаллического материала класса m3m кубиче-ской системы, базирующейся на представлениях упругого потенциала U и меха-нических деформаций εjk в виде
U =1
2cp11
3∑
k=1
u2k,k +
1
2cp44
3∑
k,l=1,k 6=l
u2k,l + c
(p)44
3∑
k,l=1,k<l
uk,lul,k + c(p)12
3∑
k,l=1,k<l
uk,kul,l+
+1
6∆
(p)1
3∑
k=1
u3k,k +
3∑
k,l,m=l,k 6=l,m,l 6=m
uk,luk,mum,l +1
2∆
(p)2
3∑
k,l=1,k 6=l
uk,ku2k,l+

Энергетические характеристики нелинейных вторых гармоник ... 225
+1
2∆
(p)3
3∑
k,l=1,k 6=l
uk,ku2l,k +
1
2∆
(p)5
3∑
k,l=1,k 6=l
uk,ku2l,l +
1
2∆
(p)7
3∑
k,l,m=l,k 6=l,m,l 6=m
uk,ku2l,m+
+c(p)144
3∑
k,l,m=l,k 6=l,m,l<m
uk,kul,mum,l + ∆(p)4
3∑
k,l=1,k<l
uk,kuk,lul,k+ (1)
+∆(p)6
3∑
k,l,m=l,k 6=l,m,l<m
uk,luk,m(ul,m + um,l) + c(p)456
3∑
l,m=2,l 6=m
u1,lul,mum,l,
εjk =1
2(ul,k + uk,j + ul,jul,k),
где
∆(p)1 = 3c
(p)11 + c
(p)111; ∆
(p)2 = c
(p)12 + 2c
(p)44 + c
(p)155; ∆
(p)3 = c
(p)11 + c
(p)155; ∆
(p)4 = c
(p)44 + c
(p)155; (2)
∆(p)5 = c
(p)12 + c
(p)112; ∆
(p)6 = c
(p)44 + c
(p)456; ∆
(p)5 = c
(p)12 + c
(p)144; uj,k = ∂uj/∂xk,
c(p)jdrk, c
(p)jqiklm — соответственно тензоры упругих постоянных первого и второго по-
рядка для монокристалла слоя (p = 1) и монокристалла подложки (p = 2).Получение аналитических представлений вторых гармоник волн Ля-
ва. Рассматриваемая задача на основе концепции определения составляющихнелинейного волнового поля как членов отрезка ряда по степеням малого пара-метра — акустического числа Маха δ в представлении вектор-функций напряжен-ности волны в компоненте Vp
~u(p) = ~u(p,l) + δ~u(p,n) (3)
сводится к однородной спектральной задаче относительно комплексной функциинапряженности ~u(p,l) линейных волн Лява в рассматриваемой структуре
σ(p,l)2j,j − ρpu
(p)2 = 0 (p = 1, 2), (4)
(σ1,l32 )x3=−h = 0, (σ1,l
32 )x3=0 = (σ2,l32 )x3=0, (u1,l
2 )x3=0 = (u2,l2 )x3=0 (5)
и неоднородной краевой задаче для определения функции напряженности ~u(p,n)
нелинейных ангармонических возмущений (вторых гармоник волн Лява)
(σ(p,l)ij,j )~u(p)=~u(p,n) − ρpu
(p,n)i = (σ
(p,n)ij,j )~u(p)=~u(p,l) ; (6)
(σ(1,l)ij )~u(1=~u(1,n) + (σ
(1,n)ij )~u(1)=~u(1,l) = 0 при x3 = −h,
(σ(1,l)3i )~u(1)=~u(1,n) +(σ
(1,n)3i )~u(1)=~u(1,l) = (σ
(2,l)3i )~u(2)=~u(2,n) +(σ
(2,n)3i )~u(2)=~u(2,l) при x3 = 0, (7)
u(2,n)2 = u
(1,n)2 при x3 = 0.
В приведенных выше соотношениях тензоры σ(p,l)ij и σ
(p,n)ij имеют представления
σ(p,l)jj =
1
2∆
(p)1 (u
(p)j,j )2 +
1
2∆
(p)2
((u
(p)j,l )2 + (u
(p)j,k)2
)+
1
2∆
(p)3
((u
(p)l,j )2 + (u
(p)k,j)
2)+

226 Щербак Н.В., Сторожев В.И.
+∆(p)4
(u
(p)j,l u
(p)l,j + u
(p)j,ku
(p)k,j
)+
1
2∆
(p)5
(2u
(p)j,j u
(p)l,lj + u
(p)j,j u
(p)k,k + (u
(p)l,l )2 + (u
(p)k,k)
2)+
+1
2∆
(p)7
((u
(p)j,k)2 + (u
(p)k,l )
2)
+ c(p)144u
(p)l,k u
(p)k,l + c
(p)123u
(p)l,l u
(p)k,k (j = 1, 3), (8)
σ(p,l)rj = ∆
(p)2 u(p)
r,ru(p)r,j +∆
(p)3 u
(p)j,j u
(p)r,j +∆
(p)4
(u(p)
r,ru(p)j,r +u
(p)j,j u
(p)j,r
)+∆
(p)6
(u(p)
r,mu(p)m,j +u(p)
m,ru(p)m,j)+
+∆(p)6 u(p)
r,mu(p)j,m + ∆
(p)7 u
(p)r,j u
(p)m,m + c
(p)144u
(p)r,j u
(p)m,m + c
(p)456u
(p)j,mu(p)
m,r (r, j = 1, 3, r 6= j)
l =
1, j=2, 3;2, j=1;
k =
2, j=3;3, j=1, 2;
m =
1, (r, j)=(2, 3), (3, 2);2, (r, j)=(1, 3), (3, 1);3, (r, j)=(1, 2), (2, 1).
Последние соотношения не являются тензорными и в них не предполагается сум-мирование по повторяющимся индексам.
Из соотношений спектральной задачи (4), (5) следуют представления для ком-плексных функций волновых перемещений u
(p,l)2 с нормирующим амплитудным
параметром u(0)2 в линейных волнах Лява для компоненты Vp:
u(1,l)2 = u
(0)2
(cos(α(1)x3) + ic
(2)44 α(2) sin(α(1)x3)/(c
(1)44 α(1))
)e−i(ωt−kx1),
u(2,l)2 = u
(0)2 eiα(2)x3e−i(ωt−kx1), α(j) =
((−c
(j)44 k2 + ρjω
2)/c(j)44
) 12 . (9)
Неоднородная граничная задача относительно компонент комплексного векто-ра напряженности вторых гармоник волн Лява для компоненты Vp в рассматри-ваемой структуре имеет вид:
ρpu(p,n)1 − c
(p)11 u
(p,n)1,11 − c
(p)44 u
(p,n)1,33 −∆
(p)8 u
(p,n)3,31 = ∆
(p)3 u
(p,l)2,1 u
(p,l)2,11+
+∆(p)6 u
(p,l)2,1 u
(p,l)2,33 +
(∆
(p)6 + ∆
(p)7
)u
(p,l)2,3 u
(p,l)2,31 ,
ρpu(p,n)3 − c
(p)11 u
(p,n)3,33 − c
(p)44 u
(p,n)3,11 −∆
(p)8 u
(p,n)1,13 = ∆
(p)3 u
(p,l)2,3 u
(p,l)2,33+
+∆(p)6 u
(p,l)2,3 u
(p,l)2,11 +
(∆
(p)6 + ∆
(p)7
)u
(p,l)2,1 u
(p,l)2,13 ; (10)
c(1)44
(u
(1,n)1,3 + u
(1,n)3,1
)x3=−h
= −(u
(1,l)2,1 u
(1,l)2,3
)x3=−h
,
(c(1)12 u
(1,n)1,1 + c
(1)11 u
(1,n)3,3
)x3=−h
= −1
2
(∆
(1)7 (u
(1,l)2,1 )2 + ∆
(1)3 (u
(1,l)2,3 )2
)x3=−h
,
c(1)44
(u
(1,n)1,3 + u
(1,n)3,1
)x3=0
− c(2)44
(u
(2,n)1,3 + u
(2,n)3,1
)x3=0
=(u
(2,l)2,1 u
(2,l)2,3
)x3=0
− (u
(1,l)2,1 u
(1,l)2,3
)x3=0
,
(u
(1,n)2,3
)x3=0
− (u
(2,n)2,3
)x3=0
= 0, (11)
(c(1)12 u
(1,n)1,1 + c
(1)11 u
(1,n)3,3
)x3=0
− (c(2)12 u
(2,n)1,1 + c
(2)11 u
(2,n)3,3
)x3=0
=
=1
2
(∆
(2)7 (u
(2,l)2,1 )2 + ∆
(2)3 (u
(2,l)2,3 )2
)x3=0
− 1
2
(∆
(1)7 (u
(1,l)2,1 )2 + ∆
(1)3 (u
(1,l)2,3 )2
)x3=0
,
(u
(1,n)j
)x3=0
− (u
(2,n)j
)x3=0
= 0 (j = 1, 3), где ∆(p)8 = c
(p)12 + c
(p)44 .

Энергетические характеристики нелинейных вторых гармоник ... 227
Из (10), (11) следует что вторыми гармониками поверхностных линейных волнЛява будут волны P − SV типа. Компоненты u
(p,n)j (j = 1, j = 3) комплексного
вектора напряженности вторых гармоник определяются из соотношений краевойзадачи (10), (11) в аналитической форме методами компьютерной алгебры и имеютструктуру:
u(1,n)1 =
(λ11 cos(ζ
(1)1 x3) + λ12 cos(ζ
(1)2 x3) + µ11 sin(ζ
(1)1 x3) + µ12 sin(ζ
(1)2 x3)+
+ν1 + χ1 cos(2α(1)x3) + ξ1 sin(2α(1)x3))exp(−2i(ωt− kx1));
u(1,n)3 =
(λ31 sin(ζ
(1)1 x3) + λ32 sin(ζ
(1)2 x3) + µ31 cos(ζ
(1)1 x3) + µ32 cos(ζ
(1)2 x3)+
+ν3 + χ3 sin(2α(1)x3) + ξ3 cos(2α(1)x3))exp(−2i(ωt− kx1)); (12)
u(2,n)1 =
(β11exp(ζ
(2)1 x3) + β12exp(ζ
(2)2 x3) + γ1exp(2iα(2)x3)
)exp(−2i(ωt− kx1));
u(2,n)3 =
(β31exp(ζ
(2)1 x3) + β32exp(ζ
(2)2 x3) + γ3exp(2iα(2)x3)
)exp(−2i(ωt− kx1)).
Коэффициенты в представлениях (12) получены в сложной аналитической форме.Численные результаты. Численные исследования кинематических характе-
ристик нелинейных вторых гармоник исследуемых поверхностных волн реализо-ваны для волновода в виде слоя V1 из монокристалла германия, расположенногона полупространстве V2 из монокристалла кремния. Компоненты волновода ха-рактеризуются такими независимыми физико-механическими постоянными:
ρ1 = 5, 32ρ∗; c(1)11 = 12, 92c∗; c
(1)12 = 4, 79c∗; c
(1)44 = 6, 70c∗; c
(1)111 = −71, 00c∗;
c(1)112 = −38, 90c∗; c
(1)123 = −1, 80c∗; c
(1)144 = −2, 30c∗; c
(1)456 = −5, 30c∗; c
(1)155 = −29, 20c∗;
ρ2 = 2, 33ρ∗; c(2)11 = 16, 70c∗; c
(2)12 = 7, 90c∗; c
(2)44 = 6, 50c∗; c
(2)111 = −82, 50c∗;
c(2)112 = −45, 10c∗; c
(2)123 = −6, 40c∗; c
(2)144 = 1, 20c∗; c
(2)456 = −6, 40c∗; c
(2)155 = −31, 00c∗;
где c∗ = 1010 Па и ρ∗ = 103 кг/м3. Энергетические эффекты при распространенииволн рассматриваемого типа могут быть охарактеризованы вектором плотностисреднего за период потока мощности с компонентами Pk = − iω
4(σjkuj − σjkuj).
Иллюстративные расчеты нормированных распространений Pj в линейных вол-нах Лява относительной длины λ/h (пунктирные линии) и их вторых гармо-никах (сплошные линии) для зоны по толщине волновода, включающей областьслоя x3/h ∈ [−1; 0] и область x3/h ∈ (0; 4] в полупространстве представлены нарис. 1–рис. 2. Рассмотрены случаи λ/h = 3 и λ/h = 4. В линейных волнах Ляваэнергетические потоки характеризуются единственной ненулевой компонентой P1,которая достигает максимальных значений на свободной поверхности слоя V1 имонотонно затухает при отходе от указанной граничной поверхности вглубь вол-новода. Потоки мощности для вторых гармоник поверхностной волны Лява в рас-сматриваемом волноводе характеризуется ненулевыми компонентами P1 и P3, тоесть вторые гармоники волн Лява, представляющие собой волны P − SV типа,не являются в подлинном смысле поверхностными волнами, а представляют со-бой так называемые “вытекающие” приграничные волны. Характеристикой потокаэнергии излучаемой вглубь волновода в данном случае является компонента P3.Расчеты показывают, что соотношение P3/P1 во вторых гармониках анализиру-емых волн в абсолютных характеристиках уменьшается с ростом относительнойдлины волны.
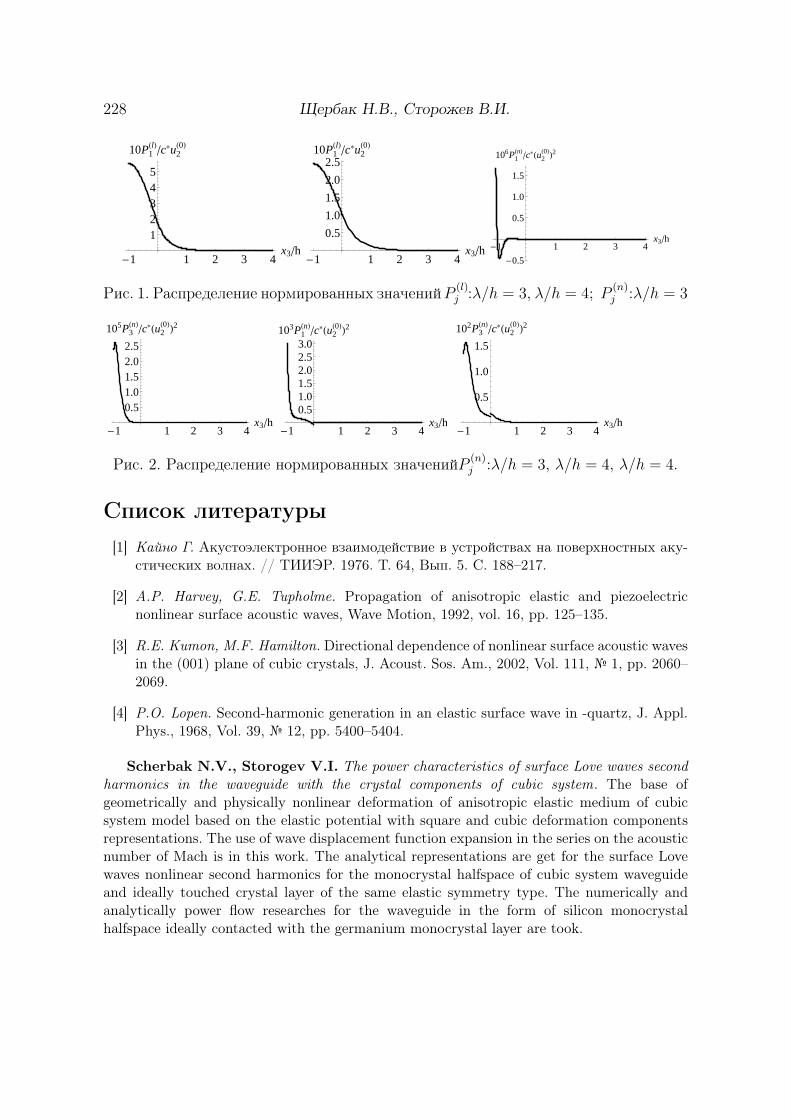
228 Щербак Н.В., Сторожев В.И.
-1 1 2 3 4x3h
12345
10P1HlLc*u2
H0L
-1 1 2 3 4x3h
0.5
1.0
1.5
2.0
2.510P1
HlLc*u2
H0L
-1 1 2 3 4x3h
-0.5
0.5
1.0
1.5
106P1HnLc*Hu2
H0LL2
Рис. 1. Распределение нормированных значенийP(l)j :λ/h = 3, λ/h = 4; P
(n)j :λ/h = 3
-1 1 2 3 4x3h
0.51.01.52.02.5
105P3HnLc*Hu2
H0LL2
-1 1 2 3 4x3h
0.51.01.52.02.53.0
103P1HnLc*Hu2
H0LL2
-1 1 2 3 4x3h
0.5
1.0
1.5
102P3HnLc*Hu2
H0LL2
Рис. 2. Распределение нормированных значенийP(n)j :λ/h = 3, λ/h = 4, λ/h = 4.
Список литературы[1] Кайно Г. Акустоэлектронное взаимодействие в устройствах на поверхностных аку-
стических волнах. // ТИИЭР. 1976. Т. 64, Вып. 5. С. 188–217.
[2] A.P. Harvey, G.E. Tupholme. Propagation of anisotropic elastic and piezoelectricnonlinear surface acoustic waves, Wave Motion, 1992, vol. 16, pp. 125–135.
[3] R.E. Kumon, M.F. Hamilton. Directional dependence of nonlinear surface acoustic wavesin the (001) plane of cubic crystals, J. Acoust. Sos. Am., 2002, Vol. 111, 1, pp. 2060–2069.
[4] P.O. Lopen. Second-harmonic generation in an elastic surface wave in -quartz, J. Appl.Phys., 1968, Vol. 39, 12, pp. 5400–5404.
Scherbak N.V., Storogev V.I. The power characteristics of surface Love waves secondharmonics in the waveguide with the crystal components of cubic system. The base ofgeometrically and physically nonlinear deformation of anisotropic elastic medium of cubicsystem model based on the elastic potential with square and cubic deformation componentsrepresentations. The use of wave displacement function expansion in the series on the acousticnumber of Mach is in this work. The analytical representations are get for the surface Lovewaves nonlinear second harmonics for the monocrystal halfspace of cubic system waveguideand ideally touched crystal layer of the same elastic symmetry type. The numerically andanalytically power flow researches for the waveguide in the form of silicon monocrystalhalfspace ideally contacted with the germanium monocrystal layer are took.
УСТОЙЧИВОСТЬ ВЫПУКЛЫХ ОБОЛОЧЕК ПЕРЕМЕННОЙКРИВИЗНЫ
Юдин С.А., Юдин А.С.НИИ механики и прикладной математики им. Воровича И.И.
Южного федерального университета, Ростов-на-Дону
Анализируется устойчивость куполообразной оболочки, получаемой вытяжкой изпластинки гидростатическим давлением и сосредоточенной в вершине артифицирую-щей силой [1]. Кривизна получаемой таким способом слегка сплюснутой сфероидальнойоболочки варьируется в окрестности апекса для настройки на заданную критическуюнагрузку.
Конечная форма оболочки должна обеспечивать заданную критическую на-грузку внешнего давления и начальную осесимметричную форму потери устойчи-вости. Смысл артификации состоит в том, чтобы увести оболочку от бифуркацион-ной неосесимметричной начальной формы потери устойчивости, чувствительной кслучайным геометрическим несовершенствам, и заставить ее терять устойчивостьпо осесимметричной форме.
При имитационном моделировании технологии изготовления оболочки процессподбора артифицирующих воздействий на ее форму должен выполняться в со-четании с решением задачи устойчивости, в которой определяется критическаянагрузка (давление срабатывания).
Техника решения нелинейных задач устойчивости оболочек обычно строитсяследующим образом. Начиная от малых уровней, шагами по нагрузке q решаетсяряд задач расчета напряженно-деформированного состояния. Если используетсяметод пристрелки, то это позволяет прогнозировать краевые значения определя-ющих функций по параметру нагрузки. Фиксируя прогиб в вершине w0, мож-но строить диаграммы нагружения w0(q) или q(w0). Приближение производнойdq/dw0 к нулю (dw0/dq → ∞) означает близость к предельной (критической) на-грузке. Этот критерий используется для прогнозирования критической нагрузкитакже и аппаратурным неразрушающим методом.
Вначале проводились вычислительные эксперименты на основе метода двусто-ронней пристрелки. Использовались как уравнения типа Э. Рейсснера, так и типаВ.В. Новожилова. Счет идет, но весьма долго и с малым шагом по параметрунагрузки. Существенно более эффективным оказалось применение метода диф-ференциальной ортогональной прогонки в сочетании с итерационным процессом.Этот алгоритм использовался в качестве основного в сочетании с уравнениямитипа В.В. Новожилова. Последние имеют квадратичное приближение и хорошоапробированы в алгоритмах решения нелинейных задач на основе метода ортого-нальной прогонки в сочетании с итерационными процессами [2]. Применительнок куполообразным оболочкам эти уравнения дают результаты, согласующиеся срезультатами решения на основе уравнений Э. Рейсснера [3].

230 Юдин С.А., Юдин А.С.
Выполним переход к безразмерным величинам на основе формул, приведенныхв [4]. Рассматриваем изотропные оболочки переменной толщины, нагруженныевнешним нормальным равномерным давлением. Введем основные функции:
y1 = T11, y2 = Q11, y3 = M11, y4 = u, y5 = w, y6 = θ1
Уравнения приводятся к канонической системе ОДУ:
y, ξ = A1(ξ)[FL(ξ,y) + FN(ξ,y) + q]
где :y = y1, . . . , y6, FL = FL1, FL2, FL3, FL4, FL5, FL6,
FN = 0, 0, FN3, FN4, 0, 0, q = 0, q, 0, 0, 0, 0;FL1(ξ,y) = (1− ν)ψ(ξ)B(ξ)(1 + ν)[ψ(ξ)y4 + k2(ξ)y5]− y1 − k1(ξ)y2,
FL2(ξ,y) = −ψ(ξ)y2 + [k1(ξ) + νk2(ξ)]y1 + k2(ξ)B(ξ)(1− ν2)[ψ(ξ)y4 + k2(ξ)y5],
FL3(ξ,y) = (1− ν)ψ(ξ)[D(ξ)(1 + ν)ψ(ξ)y6 − y3] + y1/ε∗, FN3(ξ,y) = y1y6,
FL4(ξ,y) = y1/B(ξ)− νψ(ξ)y4 − [k1(ξ) + νk2(ξ)]y5, FN4(ξ,y) = 0.5ε∗(y6)2,
FL5(ξ,y) = k1(ξ)y4 − y6,
FL6(ξ,y) = y3/[ε∗D(ξ)]− νψ(ξ)y6.
Здесь в правых частях выделены линейные (индекс L) и нелинейные (индекс N)слагаемые; q — безразмерная интенсивность внешнего давления.
Однородные краевые условия в альтернативной форме записываются в виде:
γ1y1 + (1− γ1)y4 = 0, γ2y2 + (1− γ2)y5 = 0,
γ3y3 + (1− γ3)y6 = 0, ξ = ξ0;
γ4y1 + (1− γ4)y4 = 0, γ5y2 + (1− γ5)y5 = 0,
γ6y3 + (1− γ6)y6 = 0, ξ = ξ1.
Поскольку ортогональная прогонка применима только к линейным краевым зада-чам, необходимо строить итерационный процесс, на каждом шаге которого реша-ется задача для линейной системы. Наиболее эффективны по скорости сходимостипроцессы типа Ньютона – Канторовича [4]. Однако для их реализации необходимопостроение матрицы Якоби вектор-функции правых частей системы, что усложня-ет формулы правых частей и замедляет процесс решения линеаризованных задач.
Алгоритмически более удобен в реализации простой итерационный процесс, вкотором на нулевом шаге s = 0 решается линейная задача, а на последующихквазилинейная система следующего вида:
y(s+1),ξ = A1(ξ)[FL(ξ,ys+1) + FK(ξ,ys+1,ys) + q],
где :FK = 0, 0, FK3, FK4, 0, 0, FK3(ξ,y) = 0.5[y1(s+1)y6s + y1sy6(s+1)],
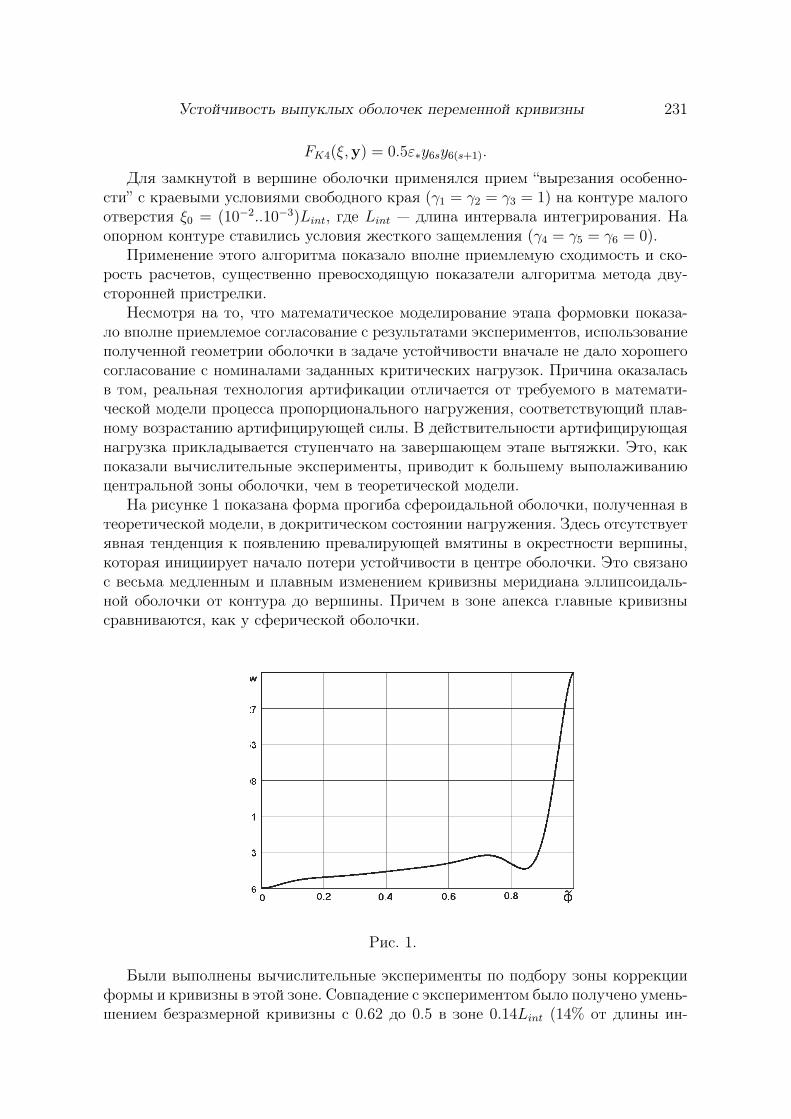
Устойчивость выпуклых оболочек переменной кривизны 231
FK4(ξ,y) = 0.5ε∗y6sy6(s+1).
Для замкнутой в вершине оболочки применялся прием “вырезания особенно-сти” с краевыми условиями свободного края (γ1 = γ2 = γ3 = 1) на контуре малогоотверстия ξ0 = (10−2..10−3)Lint, где Lint — длина интервала интегрирования. Наопорном контуре ставились условия жесткого защемления (γ4 = γ5 = γ6 = 0).
Применение этого алгоритма показало вполне приемлемую сходимость и ско-рость расчетов, существенно превосходящую показатели алгоритма метода дву-сторонней пристрелки.
Несмотря на то, что математическое моделирование этапа формовки показа-ло вполне приемлемое согласование с результатами экспериментов, использованиеполученной геометрии оболочки в задаче устойчивости вначале не дало хорошегосогласование с номиналами заданных критических нагрузок. Причина оказаласьв том, реальная технология артификации отличается от требуемого в математи-ческой модели процесса пропорционального нагружения, соответствующий плав-ному возрастанию артифицирующей силы. В действительности артифицирующаянагрузка прикладывается ступенчато на завершающем этапе вытяжки. Это, какпоказали вычислительные эксперименты, приводит к большему выполаживаниюцентральной зоны оболочки, чем в теоретической модели.
На рисунке 1 показана форма прогиба сфероидальной оболочки, полученная втеоретической модели, в докритическом состоянии нагружения. Здесь отсутствуетявная тенденция к появлению превалирующей вмятины в окрестности вершины,которая инициирует начало потери устойчивости в центре оболочки. Это связанос весьма медленным и плавным изменением кривизны меридиана эллипсоидаль-ной оболочки от контура до вершины. Причем в зоне апекса главные кривизнысравниваются, как у сферической оболочки.
Рис. 1.
Были выполнены вычислительные эксперименты по подбору зоны коррекцииформы и кривизны в этой зоне. Совпадение с экспериментом было получено умень-шением безразмерной кривизны с 0.62 до 0.5 в зоне 0.14Lint (14% от длины ин-
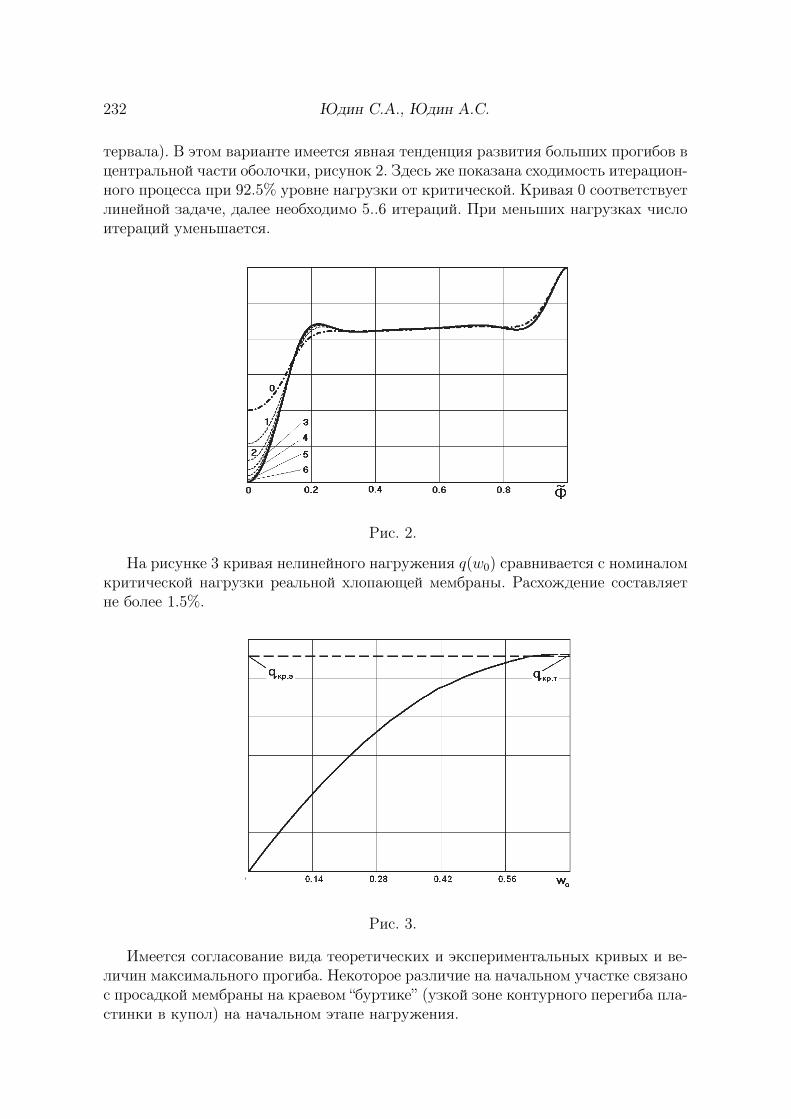
232 Юдин С.А., Юдин А.С.
тервала). В этом варианте имеется явная тенденция развития больших прогибов вцентральной части оболочки, рисунок 2. Здесь же показана сходимость итерацион-ного процесса при 92.5% уровне нагрузки от критической. Кривая 0 соответствуетлинейной задаче, далее необходимо 5..6 итераций. При меньших нагрузках числоитераций уменьшается.
Рис. 2.
На рисунке 3 кривая нелинейного нагружения q(w0) сравнивается с номиналомкритической нагрузки реальной хлопающей мембраны. Расхождение составляетне более 1.5%.
Рис. 3.
Имеется согласование вида теоретических и экспериментальных кривых и ве-личин максимального прогиба. Некоторое различие на начальном участке связанос просадкой мембраны на краевом “буртике” (узкой зоне контурного перегиба пла-стинки в купол) на начальном этапе нагружения.
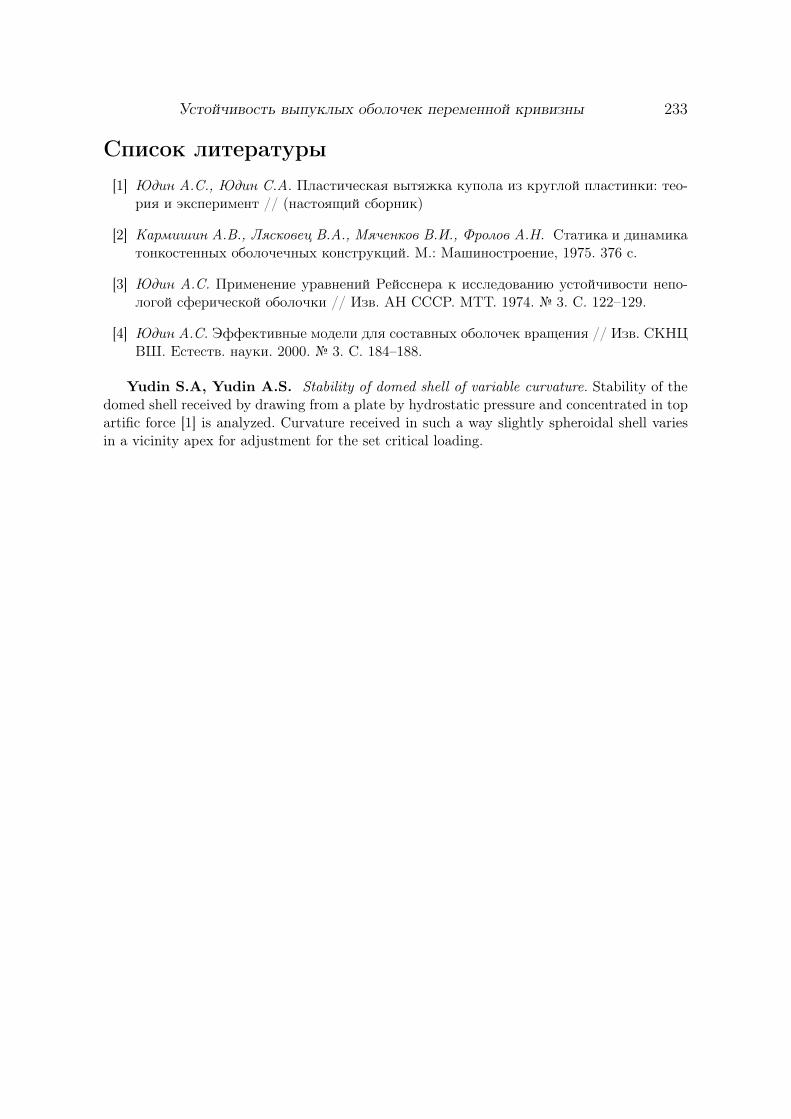
Устойчивость выпуклых оболочек переменной кривизны 233
Список литературы[1] Юдин А.С., Юдин С.А. Пластическая вытяжка купола из круглой пластинки: тео-
рия и эксперимент // (настоящий сборник)
[2] Кармишин А.В., Лясковец В.А., Мяченков В.И., Фролов А.Н. Статика и динамикатонкостенных оболочечных конструкций. М.: Машиностроение, 1975. 376 с.
[3] Юдин А.С. Применение уравнений Рейсснера к исследованию устойчивости непо-логой сферической оболочки // Изв. АН СССР. МТТ. 1974. 3. С. 122–129.
[4] Юдин А.С. Эффективные модели для составных оболочек вращения // Изв. СКНЦВШ. Естеств. науки. 2000. 3. С. 184–188.
Yudin S.A, Yudin A.S. Stability of domed shell of variable curvature. Stability of thedomed shell received by drawing from a plate by hydrostatic pressure and concentrated in topartific force [1] is analyzed. Curvature received in such a way slightly spheroidal shell variesin a vicinity apex for adjustment for the set critical loading.